
長尺農作物の方向修正搬送装置
【課題】長尺農作物の方向修正搬送のオートメーション化。
【解決手段】長手方向の一端側の向きが搬送方向下流側方向でないと識別された長尺農作物Aを、この長尺農作物Aの一端側の向きを搬送方向下流側方向に向かせるように修正しながら、コンベア3Bの搬送方向と交差する方向を搬送方向とするシュータ6に送り出し、長手方向の一端側の向きが搬送方向下流側方向であると識別された長尺農作物Aを、その向きを保った状態でシュータ6に送り出すようにし、このシュータ6は、向きが修正されて送り出される長尺農作物Aを、その向きを保った状態で搬送する。
【解決手段】長手方向の一端側の向きが搬送方向下流側方向でないと識別された長尺農作物Aを、この長尺農作物Aの一端側の向きを搬送方向下流側方向に向かせるように修正しながら、コンベア3Bの搬送方向と交差する方向を搬送方向とするシュータ6に送り出し、長手方向の一端側の向きが搬送方向下流側方向であると識別された長尺農作物Aを、その向きを保った状態でシュータ6に送り出すようにし、このシュータ6は、向きが修正されて送り出される長尺農作物Aを、その向きを保った状態で搬送する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、整列搬送される長尺農作物をすべて同じ向きになるように修正する機能を有する方向修正搬送装置に関する。
【背景技術】
【0002】
搬送される長尺農作物の方向をすべて同じ向きに修正する方向修正搬送装置は、搬送中に長尺農作物(以下「農作物」という)を回転させることによって、農作物の方向をすべて同じ向きに修正するものが知られている。
【0003】
特許文献1に記載の農作物の方向修正搬送装置は、コンベア上で一方向に整列搬送される農作物の向きを判定する向き判定手段と、この判定結果に応じて、農作物の先端側と茎側とに夫々向かい合う方向から力を加えて農作物を1/4回転させることによって、農作物の方向をすべて同じ向きに修正する姿勢変更手段を備えている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平10−67419号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1の従来技術によると、農作物を姿勢変更手段によって、農作物の方向をすべて同じ向きに修正して搬送することができる。しかしながら、特許文献1の従来技術は、農作物の先端側と茎側とに夫々向かい合う方向から空気圧による力を加えて、この農作物を1/4回転させる構成であるため、前述の空気圧によっては、1/4回転未満あるいは1/4回転を超える回転をしてしまい、農作物が整列しない状態となるという問題があった。
【0006】
本発明は、このような問題に対処することを課題の一例とするものである。すなわち、長尺農作物の方向をすべて同じ向きに修正して搬送することを確実にできること、長尺農作物の方向をすべて同じ向きに修正して搬送することを確実に行うことで、人手による監視及び方向修正作業を不要にできること、人手による監視及び方向修正作業を不要にすることで、長尺農作物の方向修正搬送のオートメーション化を達成できること、等が本発明の目的である。
【課題を解決するための手段】
【0007】
このような目的を達成するために、本発明による長尺農作物の方向修正搬送装置は、以下の構成を少なくとも具備するものである。
【0008】
長尺農作物の長手方向を一方向として整列搬送するコンベアと、このコンベア上に設けられ、搬送される長尺農作物の長手方向の一端側の向きが搬送方向下流方向であるか否かを識別する識別装置と、同コンベア上、且つ識別装置の搬送方向下流側に設けられ、この選別装置で長手方向の一端側の向きが搬送方向下流側方向でないと識別された長尺農作物を、この長尺農作物の一端側の向きを搬送方向下流側方向に向かせるように修正しながら、コンベアの搬送方向と交差する方向に送り出すように動作する方向修正装置と、方向修正装置の長尺農作物を送り出す方向を搬送方向とし、この方向修正装置から向きが修正されて送り出される長尺農作物を、その向きを保った状態で搬送するように設けられたシュータとを備え、方向修正装置は、更に、選別装置で長尺農作物の長手方向の一端側の向きが搬送方向下流側方向であると識別された長尺農作物を、その向きを保った状態でシュータに送り出すように動作するようにされていることを特徴とする。
【発明の効果】
【0009】
このような特徴を有することで本発明は以下の効果を奏する。長手方向の一端側の向きが搬送方向下流側方向でないと識別された長尺農作物を、この長尺農作物の一端側の向きを搬送方向下流側方向に向かせるように修正しながら、コンベアの搬送方向と交差する方向を搬送方向とするシュータに送り出し、長手方向の一端側の向きが搬送方向下流側方向であると識別された長尺農作物を、その向きを保った状態でシュータに送り出すようにし、このシュータが、向きが修正されて送り出される長尺農作物を、その向きを保った状態で搬送するようにしているので、長尺農作物の方向をすべて同じ向きに修正して搬送することを確実にできる。長尺農作物の方向をすべて同じ向きに修正して搬送することを確実に行うことで、人手による監視及び方向修正作業を不要にできるので、長尺農作物の方向修正搬送のオートメーション化を達成できる。
【図面の簡単な説明】
【0010】
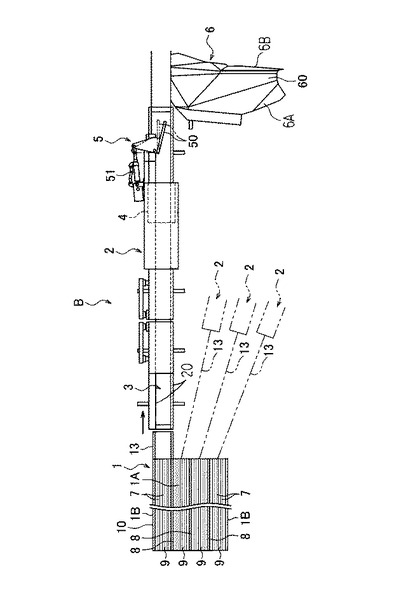
【図1】本発明に係る農作物搬送装置を適用した農作物搬送システムの平面図。
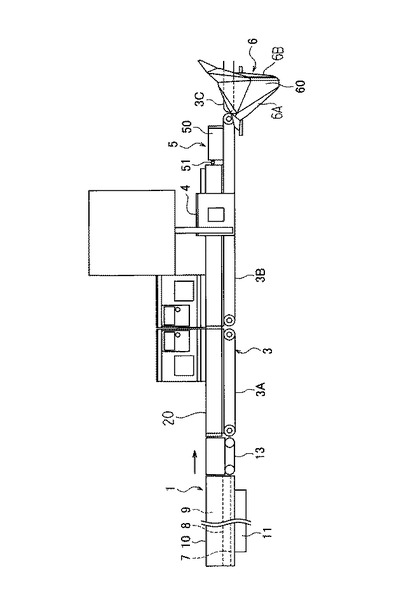
【図2】同、側面図。
【図3】図1の要部拡大平面図。
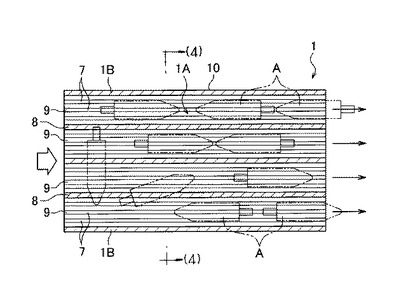
【図4】図3の(4)-(4)線拡大断面図。
【図5】方向修正装置の概略動作図で、非方向修正移送動作を示す。
【図6】方向修正装置の概略動作図で、方向修正動作を示す。
【図7】方向修正装置の概略動作図で、非移送動作を示す。
【発明を実施するための形態】
【0011】
本発明でいう長尺農作物とは、とうもろこし、人参、きゅうり等の比較的短い農作物、大根、ごぼう、長いも等の比較的長い農作物を意味する。
【0012】
以下に説明する長尺農作物の方向修正搬送装置は、特に、長尺農作物の向き(先端側又は茎側の向き)を一方向に修正搬送するのに好適なものであり、この農作物の方向修正搬送装置の搬送方向下流側には、例えば、長尺農作物の茎部分や葉部分を切断する切断装置、長尺農作物の内部を検査するX線検査装置、長尺農作物を箱詰めするための箱詰め装置等、長尺農作物の向きが一方向でないと作業が正常に行われない装置を連設することができる。
【0013】
識別装置は、更に、搬送される長尺農作物が規格外のものであることを識別するものであり、この識別結果に基づいて方向修正装置が、長尺農作物をシュータに送り出さないように動作するものである。
【0014】
方向修正装置は、長さ方向がコンベアの幅よりも長い板状に形成され、搬送方向上流側の端部が、コンベアの幅方向側端部に鉛直方向に沿って立設された支軸に、この支軸を回転中心として回転自在に支持されたフリッパと、識別結果に基づいてフリッパを回転させる動作をする動力部とを備え、この動力部の動力で回転するフリッパが長尺農作物を叩くことによって長尺農作物の一端側の向きを搬送方向下流側に向くように修正するとともに、シュータに送り出し、動力部の動力で回転するフリッパが、長さ方向においてコンベアを斜めに横切り、搬送方向下流側の端部がシュータ側を向く状態に保持されることによって、長尺農作物の一端側の向きを修正せずに、この長尺農作物をシュータに送り出すものである。
【0015】
以下、本発明の実施形態に係る長尺農作物(以下「農作物」という)の方向修正搬送装置を図面に基づいて説明する。方向修正搬送装置2は、農作物Aの供給から整列搬送、更には、農作物Aの向き(先端側又は茎側)をすべて同じ向きに修正して搬送する農作物搬送システムBに備えられた形態として例示する。また、ここで例示する農作物Aは、先端側が細く茎側が太いとうもろこしである。
【0016】
農作物搬送システムBは、農作物搬送装置1と、この農作物搬送装置1から供給される農作物Aを、その長手方向を一方向に整列させて搬送するとともに、農作物Aの先端側の向きをすべて搬送方向下流側に向くように修正する複数の方向修正搬送装置2とから構成されている。尚、方向修正搬送装置2は、同構成とする4台とし、その内3台は、構造を省略して外形の一部を2点鎖線で示す。
【0017】
農作物搬送装置1は、基本的に振動により農作物Aを搬送する機能を有する周知の振動コンベア構造のものであり、農作物Aを載置して搬送する搬送部10と、この搬送部10を振動させる振動モータ11を備え、振動モータ11の動作にともなって搬送部10が振動するようになっている。
【0018】
方向修正搬送装置2は、農作物搬送装置1によって整列搬送された農作物Aを1本毎搬送するコンベア3と、このコンベア3上に設けられ、搬送される農作物Aの搬送方向に沿う方向が茎側か先端側か、を識別する識別装置4と、同コンベア3上に、識別装置4の搬送方向下流側に設けられ、この選別装置4で茎側として識別された農作物Aを先端側に修正する方向修正装置5と、コンベア3の最下流側に連設され、方向修正装置5で方向が修正された農作物Aを、その方向を保った状態で送り出すシュータ6とが備えられている。
【0019】
農作物搬送装置1の上流側には、この農作物搬送装置1に農作物Aを供給する農作物供給装置(図示せず)が、シュータ6の下流側には、送り出された農作物Aを搬送する搬送コンベア(図示せず)が、夫々設けられている。
【0020】
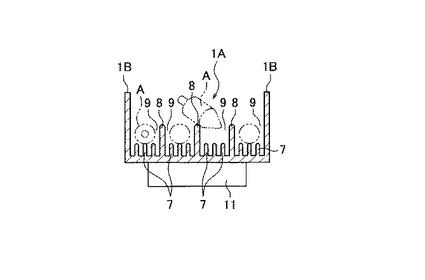
図3及び図4は、農作物搬送装置1の構成図である。搬送部10は、農作物Aを載置して搬送する搬送面1Aと、搬送面1Aの幅方向の両端部に立設された落下防止用の壁部1B(図3において右上がりの平行斜線で示す)とを備えている。搬送面1Aは、農作物Aを傷付けない程度の軟質の合成樹脂材やゴム材等を用いて形成された複数の突条体7及びこの突条体7よりも高い複数の高突条体8が立設されている。この突条体7及び高突条体8は、長手方向を搬送部10の搬送方向と平行とし、且つ搬送部10の幅方向に沿って互いの間隔を同間隔として並列状に立設されている。
【0021】
振動モータ11は、搬送部10を搬送方向と反搬送方向とに往復動させるとともに、搬送方向と反搬送方向への動作の速度に差を生じさせるように動作する周知の構造のものであり、この振動モータ11の動作によって、搬送部10を搬送方向と反搬送方向への往復方向に振動させるようになっている。この振動モータ11は、搬送部10を搬送方向へ動作させる速度が、この搬送部を反搬送方向へ動作させる速度よりも高くなるように動作するようになっており、このような動作によって、搬送面1A上の農作物Aを搬送方向に搬送できるようになっている。
【0022】
尚、振動モータ11は、農作物Aを搬送方向に搬送できるように、搬送部10を振動させるように動作するものであればよく、例示したように、搬送部10を搬送方向へ動作させる速度が、この搬送部10を反搬送方向へ動作させる速度よりも高くなるように動作する構造に限らない。
【0023】
複数(図3において3個、図3において右上がりの平行斜線で示す)の高突条体8は、隣り合う高突条体8の間に複数(図示では3個)、且つ同数の突条体7が介在するように配されており、この隣り合う高突条体8の間を、農作物Aを整列搬送する搬送レーン9としている。高突条体8の高さは、農作物Aの最大径と同等の高さにし、隣り合う高突条体8の間隔を農作物Aの最大径よりもわずかに広い間隔とされている。このような複数の突条体7及び高突条体8の立設形態によって、4列の搬送レーン9が並列方向の幅を農作物Aの最大径よりもわずかに幅広、且つ深さを農作物Aの最大径と同等とした凹状に形成されている。この4列の搬送レーン9は、列毎に1台の方向修正搬送装置2に農作物Aを供給するようになっている。
【0024】
このような搬送レーン9は、農作物Aをその長手方向が搬送方向に沿うように突条体7の上端に載置することができる。また、搬送レーン9は、高突条体8が農作物Aの径方向からこの農作物Aを挟持することで、農作物Aの長手方向を搬送方向に沿わせた状態を保持することができる。また、搬送レーン9内の突条体7の上端に載置された状態の農作物Aは、長手方向が搬送方向に保持された状態で、前述の振動によって、搬送方向下流側に向かって搬送されるようになっている。
【0025】
複数の高突条体8の上端にわたるように載置された農作物Aは、前述の振動によって搬送方向下流側に向かって搬送されながら、長手方向が搬送方向に向かう方向となるように徐々に回転する。そして、複数の高突条体8の上端にわたるように載置された農作物Aが回転によって、一つの高突条体8の上端に載置される状態となったときに、この農作物Aが傾くように搬送レーン9に落下し、この搬送レーン9内に移動する。搬送レーン9内に移動した農作物Aは、前述のように、長手方向が搬送方向に沿った状態で保持されるとともに、振動によって搬送方向下流側に向かって搬送される。
【0026】
このような農作物搬送装置1によると、搬送部10に供給された農作物Aは、搬送レーン9に入り込むもの、複数の高突条体8の上端にわたるように載置されるものがあり、双方の農作物Aを搬送部10の振動によって搬送することができる。そして、複数の高突条体8の上端にわたるように載置された農作物Aを、振動によって搬送レーン9内に入り込ませ、その長手方向が搬送方向に沿う状態で整列させて搬送することができる。したがって、農作物Aの整列搬送を確実にできるので、人手による監視及び整列作業を不要にでき、農作物Aの整列搬送のオートメーション化を達成できる。更に、農作物Aの整列搬送を効率的にできるとともに、農作物Aに傷を付けることなく搬送できるので、農作物Aの商品価値を落とすことなく搬送作業の迅速化を達成できる。
【0027】
また、搬送レーン9の並列方向の幅が農作物Aの最大径よりもわずかに幅広、且つ深さが農作物Aの最大径と同等の凹状に形成されているので、搬送レーン9内において搬送方向に沿って、1本毎に整列させることができるとともに、農作物Aを上下方向で重ならないようにすることができる。したがって、農作物Aが搬送レーン9の幅方向で並列することによる搬送レーン9内での農作物Aの詰まりを防止できるとともに、農作物Aが搬送レーン9の上下方向に重なり合って、同じ搬送レーン9内で複数の農作物Aが搬送されることを防止できるので、農作物Aの整列搬送を効率的、且つ正確に行うことができる。
【0028】
搬送部10の搬送方向下流側には、各搬送レーン9から出てくる農作物Aを、各搬送レーン9に対応する方向修正搬送装置2のコンベア3に案内搬送する案内コンベア13が連設されている。案内コンベア13は、搬送レーン9の夫々に連設されている。尚、図1において、外形の一部を2点鎖線で示す方向修正搬送装置2に繋がる案内コンベア13は、2点鎖線の単線で示している。
【0029】
コンベア3は、搬送方向に直列状に並べた2連構造のものであり、搬送方向上流側の第1コンベア3Aと、搬送方向下流側の第2コンベア3Bとから構成されている。このコンベア3は、ベルトコンベアであり、幅方向の両端部に農作物Aの落下防止用の側壁20、20が立設されている。この側壁20、20間の幅は、農作物Aの径に応じて拡縮自在になっており、基本的には、農作物Aの径よりもわずかに広くなるように設定されている。第2コンベア3B上には、識別装置4と方向修正装置5が設けられている。
【0030】
このコンベア3は、第2コンベア3Bの搬送速度を第1コンベア3Aの搬送速度よりも高くしてある。第1コンベア3Aから第2コンベア3Bに移送される農作物Aと、後続の農作物Aとの間に距離を作るようになっている。すなわち、第2コンベア3B上で搬送される複数の農作物Aの間に距離を作ることによって、農作物Aの識別装置4による識別タイミングと、識別結果に応じて動作する方向修正装置5の作動タイミングを合わせて、方向修正を必要としない農作物Aが方向修正されたり、方向修正を必要とする農作物Aが方向修正されなかったりが生じないようになっている。
【0031】
識別装置4は、農作物Aの方向を識別するものであり、先端側が搬送方向下流側に向いているか、茎側が搬送方向下流側に向いているかを検出するとともに、この検出結果を送信するように制御部(図示せず)によって制御されている。また、識別装置4は、農作物Aのサイズ(径と長さ)を計測するとともに、この計測結果を送信するように前述の制御部によって制御されている。
【0032】
識別装置4の農作物Aの方向検出方法及びサイズ計測方法については、農作物Aの方向検出及びサイズ計測ができる方法であればよい。例えば、農作物Aの方向検出は、搬送される農作物Aを識別装置4が検知した直後に、農作物Aの径を計測し、この計測と同時にあらかじめ設定された時間を計測し、更に、この時間が経過したことが計測されたと同時に農作物Aの径を計測する方法が挙げられる。
【0033】
そして、この計測結果が前述の制御部に送信され、この制御部が、最初に計測した農作物Aの径と時間経過計測後に計測した農作物Aの径とを比較し、その結果、最初に計測した農作物Aの径が小径である場合、農作物Aの先端側が搬送方向下流側を向いていると判定するとともに、方向修正装置5の方向修正動作をさせないように、且つシュータ6に移送させる動作(以下、「非方向修正移送動作」という)をさせるように制御するようになっている。逆に、最初に計測した農作物Aの径が大径である場合には、農作物Aの茎側が搬送方向下流側を向いていると判定するとともに、方向修正装置5の方向修正動作をさせるように、且つシュータ6に移送させる動作(以下、「方向修正移送動作」という)をさせるように制御するようになっている。
【0034】
このとき、前述の時間経過計測後に農作物Aの径が計測されないという結果が送信された場合には、農作物Aの長さが規定の長さではないと判定して、方向修正装置5に対して農作物Aをシュータ6に移送させないで通過させるように動作(以下、「非移送動作」という)させる制御をするようになっている。また、計測された大径側の径があらかじめ設定された径未満である場合には、農作物Aの長さが規定の径でないと判定して、方向修正装置5に対して農作物Aをシュータ6に移送させないで通過させるように動作(以下、「非移送動作」という)させる制御をするようになっている。
【0035】
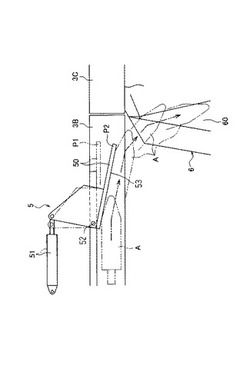
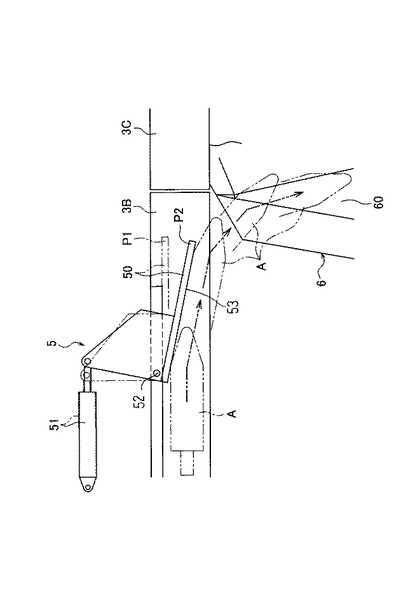
図5〜図7は、方向修正装置5の概略構成及び動作を示す概略動作図である。方向修正装置5は、搬送される農作物Aの先端側を搬送方向下流側に向ける動作をするとともに、搬送される農作物Aの内、規格内の農作物Aをシュータ6に移送する動作をするものである。シュータ6は、その農作物Aの搬送方向を第2コンベア3Bの搬送方向と交差する方向となるように設置されており、方向修正装置5が第2コンベア3B上の農作物Aを、その先端側を搬送方向下流側に向けてシュータ6に移送するようになっている。尚、本発明では、方向修正装置5の構成について、例示する構成に限定するものではない。
【0036】
方向修正装置5は、農作物Aに接触状態及び非接触状態となるように回転自在に軸支されたフリッパ50と、前述の制御部の制御によって、フリッパ50を回転させる動力部の一例であるシリンダ51とを備えている。動力部は、例示するシリンダ51に限定するものではない。
【0037】
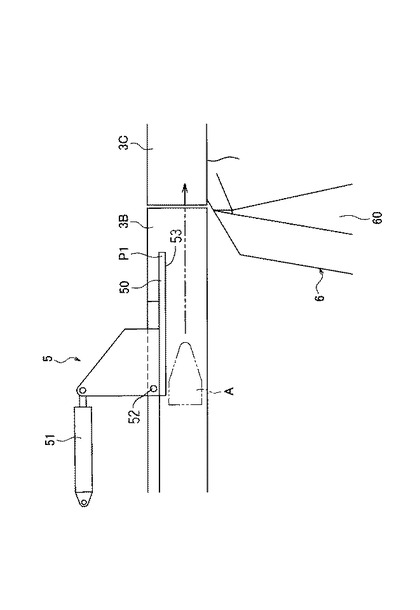
フリッパ50は、長さ方向が第2コンベア3Bの幅よりも長い板状に形成され、搬送方向上流側の端部が、第2コンベア3Bの幅方向側端部、且つ識別装置よりも搬送方向下流側に鉛直方向に沿って立設された支軸52に、この支軸52を中心として回転自在に支持されている。このフリッパ50は、通常、シリンダ51によって、非方向修正移送動作をする位置(以下、「基本位置P1」という)が保持されている。この基本位置P1を基準として、前述の制御部の制御によるシリンダ51の伸縮動作によって、方向修正移送動作及び非移送動作、並びにこれら両動作から基本位置P1に復帰する動作を行うようになっている。
【0038】
フリッパ50の基本位置P1は、農作物Aが接触するフリッパ50の接触面53が、長さ方向において、第2コンベア3Bの幅方向端部とほぼ平行となる位置である。この基本位置P1は、農作物Aをシュータ6に移送しないフリッパ50の非移送位置と同位置である。
【0039】
この基本位置P1からのフリッパ50の非方向修正移送動作は、農作物Aがフリッパ50の位置に至る前にシリンダ51を伸長させることによって、フリッパ50を搬送方向上流側に回転(図面上、時計方向の回転)させて、フリッパ50を非方向修正移送位置P2に移動させる動作である。フリッパ50の非方向修正移送位置P2は、接触面53が、長さ方向において第2コンベア3Bを斜めに横切り、搬送方向下流側の端部がシュータ6側を向く状態となる位置であり、フリッパ50の接触面53が第2コンベア3B上を搬送される農作物Aの先端と対面する位置である。
【0040】
このような非方向修正移送位置P2に保持されるフリッパ50によると、搬送される農作部Aの先端を接触面53に接触させることで、この農作物Aの搬送が止める。フリッパ50によって搬送が止められた農作物Aには、第2コンベア2Bの搬送力が作用しているので、この農作物Aを、その先端がシュータ6方向に向かい、且つ農作物Aの周面長手方向が斜めに横切る接触面53に沿った状態にし、この状態から第2コンベア2Bの搬送力によって、シュータ6に移送することができる。
【0041】
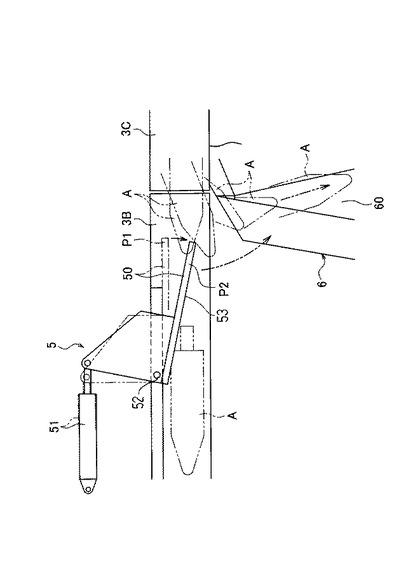
基本位置P1からのフリッパ50の方向修正移送動作は、茎側が搬送方向下流側を向いて搬送される農作物Aの先端側が、接触面53の搬送方向下流側の端部付近に至ったときに、シリンダ51を伸長させることによって、フリッパ50を搬送方向上流側に回転(図面上、時計方向の回転)させるとともに、接触面53の搬送方向下流側の端部で農作物Aの先端側の周面を叩く動作である。この方向修正移送動作におけるフリッパ50の回転量は、フリッパ50を基本位置P1から非方向修正移送位置P2に移動させる回転量と同じである。
【0042】
このように方向修正移送動作をするフリッパ50によると、このフリッパ50の回転にともなって接触面53が、茎側が搬送方向下流側を向いて搬送される農作物Aの先端側の周面を叩くことによって、農作物Aの先端をシュータ6に向かわせるように回転させて方向を修正するとともに、シュータ6に移送することができる。
【0043】
搬送される農作物Aが規格外のものである場合には、フリッパ50がその非移送位置である基本位置P1に保持され、搬送される規格外の農作物Aをシュータ6に移送せず、そのまま、第2コンベア3B上を搬送することができる。
【0044】
第2コンベア3Bの最下流側に、規格外の農作物Aを搬送する戻しコンベア3Cが連設されており、この戻しコンベア3Cに規格外の農作物を第2コンベア3Bから移送するようになっている。
【0045】
シュータ6は、方向修正装置5によって移送される農作物Aを滑らせて搬送するものであるとともに、フリッパ50の方向修正移送動作による農作物Aの方向修正を補助する機能を有するものである。尚、本発明では、シュータ6の構成について、例示する構成に限定するものではない。
【0046】
シュータ6は、農作物Aを滑らせて搬送する搬送通路60を備えている。シュータ6は、搬送方向上流側(第2コンベア3B側)の端部よりも、搬送方向下流側の端部を低く位置させることで、搬送通路60が傾斜するように設置されており、このように設置することによって、農作物Aを搬送通路60で滑らせて搬送できるようになっている。
【0047】
搬送通路60は、搬送方向下流側を幅狭とする先細り状になっており、幅方向両端部に傾斜面で構成された案内壁6A、6Bが立設されている。案内壁6Aは、移送された農作物Aを、先端側が搬送方向下流側に向け他状態を保持し、且つシュータ6外へ落とすことなく、搬送通路60方向に案内しながら、搬送下流側に滑らせて搬送することができる角度で設けられている。案内壁6Bは、移送された農作物Aのシュータ6外への落下防止ができる角度で設けられている。
【0048】
このように構成された農作物搬送システムBは、農作物搬送装置1によって、農作物Aの長手方向を搬送方向に沿うように整列搬送するとともに、この整列搬送した農作物Aを方向修正搬送装置2に搬送することができる。また、方向修正搬送装置2によって、農作物Aの方向を先端側が搬送方向下流側に向くように修正してシュータ6に移送することができるとともに、規格外の農作物Aをシュータ6に移送させないようにすることができる。また、シュータ6によって、農作物Aの先端側を搬送方向下流側に向けて、前述の搬送コンベアに搬送することができる。
【0049】
尚、本発明は、例示した実施の形態に限定するものではなく、特許請求の範囲の各項に記載された内容から逸脱しない範囲の構成による実施が可能である。
【符号の説明】
【0050】
A:農作物(長尺農作物)
2:方向修正搬送装置
3:コンベア
4:識別装置
5:方向修正装置
6:シュータ
50:フリッパ
51:シリンダ(動力部)
【技術分野】
【0001】
本発明は、整列搬送される長尺農作物をすべて同じ向きになるように修正する機能を有する方向修正搬送装置に関する。
【背景技術】
【0002】
搬送される長尺農作物の方向をすべて同じ向きに修正する方向修正搬送装置は、搬送中に長尺農作物(以下「農作物」という)を回転させることによって、農作物の方向をすべて同じ向きに修正するものが知られている。
【0003】
特許文献1に記載の農作物の方向修正搬送装置は、コンベア上で一方向に整列搬送される農作物の向きを判定する向き判定手段と、この判定結果に応じて、農作物の先端側と茎側とに夫々向かい合う方向から力を加えて農作物を1/4回転させることによって、農作物の方向をすべて同じ向きに修正する姿勢変更手段を備えている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平10−67419号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1の従来技術によると、農作物を姿勢変更手段によって、農作物の方向をすべて同じ向きに修正して搬送することができる。しかしながら、特許文献1の従来技術は、農作物の先端側と茎側とに夫々向かい合う方向から空気圧による力を加えて、この農作物を1/4回転させる構成であるため、前述の空気圧によっては、1/4回転未満あるいは1/4回転を超える回転をしてしまい、農作物が整列しない状態となるという問題があった。
【0006】
本発明は、このような問題に対処することを課題の一例とするものである。すなわち、長尺農作物の方向をすべて同じ向きに修正して搬送することを確実にできること、長尺農作物の方向をすべて同じ向きに修正して搬送することを確実に行うことで、人手による監視及び方向修正作業を不要にできること、人手による監視及び方向修正作業を不要にすることで、長尺農作物の方向修正搬送のオートメーション化を達成できること、等が本発明の目的である。
【課題を解決するための手段】
【0007】
このような目的を達成するために、本発明による長尺農作物の方向修正搬送装置は、以下の構成を少なくとも具備するものである。
【0008】
長尺農作物の長手方向を一方向として整列搬送するコンベアと、このコンベア上に設けられ、搬送される長尺農作物の長手方向の一端側の向きが搬送方向下流方向であるか否かを識別する識別装置と、同コンベア上、且つ識別装置の搬送方向下流側に設けられ、この選別装置で長手方向の一端側の向きが搬送方向下流側方向でないと識別された長尺農作物を、この長尺農作物の一端側の向きを搬送方向下流側方向に向かせるように修正しながら、コンベアの搬送方向と交差する方向に送り出すように動作する方向修正装置と、方向修正装置の長尺農作物を送り出す方向を搬送方向とし、この方向修正装置から向きが修正されて送り出される長尺農作物を、その向きを保った状態で搬送するように設けられたシュータとを備え、方向修正装置は、更に、選別装置で長尺農作物の長手方向の一端側の向きが搬送方向下流側方向であると識別された長尺農作物を、その向きを保った状態でシュータに送り出すように動作するようにされていることを特徴とする。
【発明の効果】
【0009】
このような特徴を有することで本発明は以下の効果を奏する。長手方向の一端側の向きが搬送方向下流側方向でないと識別された長尺農作物を、この長尺農作物の一端側の向きを搬送方向下流側方向に向かせるように修正しながら、コンベアの搬送方向と交差する方向を搬送方向とするシュータに送り出し、長手方向の一端側の向きが搬送方向下流側方向であると識別された長尺農作物を、その向きを保った状態でシュータに送り出すようにし、このシュータが、向きが修正されて送り出される長尺農作物を、その向きを保った状態で搬送するようにしているので、長尺農作物の方向をすべて同じ向きに修正して搬送することを確実にできる。長尺農作物の方向をすべて同じ向きに修正して搬送することを確実に行うことで、人手による監視及び方向修正作業を不要にできるので、長尺農作物の方向修正搬送のオートメーション化を達成できる。
【図面の簡単な説明】
【0010】
【図1】本発明に係る農作物搬送装置を適用した農作物搬送システムの平面図。
【図2】同、側面図。
【図3】図1の要部拡大平面図。
【図4】図3の(4)-(4)線拡大断面図。
【図5】方向修正装置の概略動作図で、非方向修正移送動作を示す。
【図6】方向修正装置の概略動作図で、方向修正動作を示す。
【図7】方向修正装置の概略動作図で、非移送動作を示す。
【発明を実施するための形態】
【0011】
本発明でいう長尺農作物とは、とうもろこし、人参、きゅうり等の比較的短い農作物、大根、ごぼう、長いも等の比較的長い農作物を意味する。
【0012】
以下に説明する長尺農作物の方向修正搬送装置は、特に、長尺農作物の向き(先端側又は茎側の向き)を一方向に修正搬送するのに好適なものであり、この農作物の方向修正搬送装置の搬送方向下流側には、例えば、長尺農作物の茎部分や葉部分を切断する切断装置、長尺農作物の内部を検査するX線検査装置、長尺農作物を箱詰めするための箱詰め装置等、長尺農作物の向きが一方向でないと作業が正常に行われない装置を連設することができる。
【0013】
識別装置は、更に、搬送される長尺農作物が規格外のものであることを識別するものであり、この識別結果に基づいて方向修正装置が、長尺農作物をシュータに送り出さないように動作するものである。
【0014】
方向修正装置は、長さ方向がコンベアの幅よりも長い板状に形成され、搬送方向上流側の端部が、コンベアの幅方向側端部に鉛直方向に沿って立設された支軸に、この支軸を回転中心として回転自在に支持されたフリッパと、識別結果に基づいてフリッパを回転させる動作をする動力部とを備え、この動力部の動力で回転するフリッパが長尺農作物を叩くことによって長尺農作物の一端側の向きを搬送方向下流側に向くように修正するとともに、シュータに送り出し、動力部の動力で回転するフリッパが、長さ方向においてコンベアを斜めに横切り、搬送方向下流側の端部がシュータ側を向く状態に保持されることによって、長尺農作物の一端側の向きを修正せずに、この長尺農作物をシュータに送り出すものである。
【0015】
以下、本発明の実施形態に係る長尺農作物(以下「農作物」という)の方向修正搬送装置を図面に基づいて説明する。方向修正搬送装置2は、農作物Aの供給から整列搬送、更には、農作物Aの向き(先端側又は茎側)をすべて同じ向きに修正して搬送する農作物搬送システムBに備えられた形態として例示する。また、ここで例示する農作物Aは、先端側が細く茎側が太いとうもろこしである。
【0016】
農作物搬送システムBは、農作物搬送装置1と、この農作物搬送装置1から供給される農作物Aを、その長手方向を一方向に整列させて搬送するとともに、農作物Aの先端側の向きをすべて搬送方向下流側に向くように修正する複数の方向修正搬送装置2とから構成されている。尚、方向修正搬送装置2は、同構成とする4台とし、その内3台は、構造を省略して外形の一部を2点鎖線で示す。
【0017】
農作物搬送装置1は、基本的に振動により農作物Aを搬送する機能を有する周知の振動コンベア構造のものであり、農作物Aを載置して搬送する搬送部10と、この搬送部10を振動させる振動モータ11を備え、振動モータ11の動作にともなって搬送部10が振動するようになっている。
【0018】
方向修正搬送装置2は、農作物搬送装置1によって整列搬送された農作物Aを1本毎搬送するコンベア3と、このコンベア3上に設けられ、搬送される農作物Aの搬送方向に沿う方向が茎側か先端側か、を識別する識別装置4と、同コンベア3上に、識別装置4の搬送方向下流側に設けられ、この選別装置4で茎側として識別された農作物Aを先端側に修正する方向修正装置5と、コンベア3の最下流側に連設され、方向修正装置5で方向が修正された農作物Aを、その方向を保った状態で送り出すシュータ6とが備えられている。
【0019】
農作物搬送装置1の上流側には、この農作物搬送装置1に農作物Aを供給する農作物供給装置(図示せず)が、シュータ6の下流側には、送り出された農作物Aを搬送する搬送コンベア(図示せず)が、夫々設けられている。
【0020】
図3及び図4は、農作物搬送装置1の構成図である。搬送部10は、農作物Aを載置して搬送する搬送面1Aと、搬送面1Aの幅方向の両端部に立設された落下防止用の壁部1B(図3において右上がりの平行斜線で示す)とを備えている。搬送面1Aは、農作物Aを傷付けない程度の軟質の合成樹脂材やゴム材等を用いて形成された複数の突条体7及びこの突条体7よりも高い複数の高突条体8が立設されている。この突条体7及び高突条体8は、長手方向を搬送部10の搬送方向と平行とし、且つ搬送部10の幅方向に沿って互いの間隔を同間隔として並列状に立設されている。
【0021】
振動モータ11は、搬送部10を搬送方向と反搬送方向とに往復動させるとともに、搬送方向と反搬送方向への動作の速度に差を生じさせるように動作する周知の構造のものであり、この振動モータ11の動作によって、搬送部10を搬送方向と反搬送方向への往復方向に振動させるようになっている。この振動モータ11は、搬送部10を搬送方向へ動作させる速度が、この搬送部を反搬送方向へ動作させる速度よりも高くなるように動作するようになっており、このような動作によって、搬送面1A上の農作物Aを搬送方向に搬送できるようになっている。
【0022】
尚、振動モータ11は、農作物Aを搬送方向に搬送できるように、搬送部10を振動させるように動作するものであればよく、例示したように、搬送部10を搬送方向へ動作させる速度が、この搬送部10を反搬送方向へ動作させる速度よりも高くなるように動作する構造に限らない。
【0023】
複数(図3において3個、図3において右上がりの平行斜線で示す)の高突条体8は、隣り合う高突条体8の間に複数(図示では3個)、且つ同数の突条体7が介在するように配されており、この隣り合う高突条体8の間を、農作物Aを整列搬送する搬送レーン9としている。高突条体8の高さは、農作物Aの最大径と同等の高さにし、隣り合う高突条体8の間隔を農作物Aの最大径よりもわずかに広い間隔とされている。このような複数の突条体7及び高突条体8の立設形態によって、4列の搬送レーン9が並列方向の幅を農作物Aの最大径よりもわずかに幅広、且つ深さを農作物Aの最大径と同等とした凹状に形成されている。この4列の搬送レーン9は、列毎に1台の方向修正搬送装置2に農作物Aを供給するようになっている。
【0024】
このような搬送レーン9は、農作物Aをその長手方向が搬送方向に沿うように突条体7の上端に載置することができる。また、搬送レーン9は、高突条体8が農作物Aの径方向からこの農作物Aを挟持することで、農作物Aの長手方向を搬送方向に沿わせた状態を保持することができる。また、搬送レーン9内の突条体7の上端に載置された状態の農作物Aは、長手方向が搬送方向に保持された状態で、前述の振動によって、搬送方向下流側に向かって搬送されるようになっている。
【0025】
複数の高突条体8の上端にわたるように載置された農作物Aは、前述の振動によって搬送方向下流側に向かって搬送されながら、長手方向が搬送方向に向かう方向となるように徐々に回転する。そして、複数の高突条体8の上端にわたるように載置された農作物Aが回転によって、一つの高突条体8の上端に載置される状態となったときに、この農作物Aが傾くように搬送レーン9に落下し、この搬送レーン9内に移動する。搬送レーン9内に移動した農作物Aは、前述のように、長手方向が搬送方向に沿った状態で保持されるとともに、振動によって搬送方向下流側に向かって搬送される。
【0026】
このような農作物搬送装置1によると、搬送部10に供給された農作物Aは、搬送レーン9に入り込むもの、複数の高突条体8の上端にわたるように載置されるものがあり、双方の農作物Aを搬送部10の振動によって搬送することができる。そして、複数の高突条体8の上端にわたるように載置された農作物Aを、振動によって搬送レーン9内に入り込ませ、その長手方向が搬送方向に沿う状態で整列させて搬送することができる。したがって、農作物Aの整列搬送を確実にできるので、人手による監視及び整列作業を不要にでき、農作物Aの整列搬送のオートメーション化を達成できる。更に、農作物Aの整列搬送を効率的にできるとともに、農作物Aに傷を付けることなく搬送できるので、農作物Aの商品価値を落とすことなく搬送作業の迅速化を達成できる。
【0027】
また、搬送レーン9の並列方向の幅が農作物Aの最大径よりもわずかに幅広、且つ深さが農作物Aの最大径と同等の凹状に形成されているので、搬送レーン9内において搬送方向に沿って、1本毎に整列させることができるとともに、農作物Aを上下方向で重ならないようにすることができる。したがって、農作物Aが搬送レーン9の幅方向で並列することによる搬送レーン9内での農作物Aの詰まりを防止できるとともに、農作物Aが搬送レーン9の上下方向に重なり合って、同じ搬送レーン9内で複数の農作物Aが搬送されることを防止できるので、農作物Aの整列搬送を効率的、且つ正確に行うことができる。
【0028】
搬送部10の搬送方向下流側には、各搬送レーン9から出てくる農作物Aを、各搬送レーン9に対応する方向修正搬送装置2のコンベア3に案内搬送する案内コンベア13が連設されている。案内コンベア13は、搬送レーン9の夫々に連設されている。尚、図1において、外形の一部を2点鎖線で示す方向修正搬送装置2に繋がる案内コンベア13は、2点鎖線の単線で示している。
【0029】
コンベア3は、搬送方向に直列状に並べた2連構造のものであり、搬送方向上流側の第1コンベア3Aと、搬送方向下流側の第2コンベア3Bとから構成されている。このコンベア3は、ベルトコンベアであり、幅方向の両端部に農作物Aの落下防止用の側壁20、20が立設されている。この側壁20、20間の幅は、農作物Aの径に応じて拡縮自在になっており、基本的には、農作物Aの径よりもわずかに広くなるように設定されている。第2コンベア3B上には、識別装置4と方向修正装置5が設けられている。
【0030】
このコンベア3は、第2コンベア3Bの搬送速度を第1コンベア3Aの搬送速度よりも高くしてある。第1コンベア3Aから第2コンベア3Bに移送される農作物Aと、後続の農作物Aとの間に距離を作るようになっている。すなわち、第2コンベア3B上で搬送される複数の農作物Aの間に距離を作ることによって、農作物Aの識別装置4による識別タイミングと、識別結果に応じて動作する方向修正装置5の作動タイミングを合わせて、方向修正を必要としない農作物Aが方向修正されたり、方向修正を必要とする農作物Aが方向修正されなかったりが生じないようになっている。
【0031】
識別装置4は、農作物Aの方向を識別するものであり、先端側が搬送方向下流側に向いているか、茎側が搬送方向下流側に向いているかを検出するとともに、この検出結果を送信するように制御部(図示せず)によって制御されている。また、識別装置4は、農作物Aのサイズ(径と長さ)を計測するとともに、この計測結果を送信するように前述の制御部によって制御されている。
【0032】
識別装置4の農作物Aの方向検出方法及びサイズ計測方法については、農作物Aの方向検出及びサイズ計測ができる方法であればよい。例えば、農作物Aの方向検出は、搬送される農作物Aを識別装置4が検知した直後に、農作物Aの径を計測し、この計測と同時にあらかじめ設定された時間を計測し、更に、この時間が経過したことが計測されたと同時に農作物Aの径を計測する方法が挙げられる。
【0033】
そして、この計測結果が前述の制御部に送信され、この制御部が、最初に計測した農作物Aの径と時間経過計測後に計測した農作物Aの径とを比較し、その結果、最初に計測した農作物Aの径が小径である場合、農作物Aの先端側が搬送方向下流側を向いていると判定するとともに、方向修正装置5の方向修正動作をさせないように、且つシュータ6に移送させる動作(以下、「非方向修正移送動作」という)をさせるように制御するようになっている。逆に、最初に計測した農作物Aの径が大径である場合には、農作物Aの茎側が搬送方向下流側を向いていると判定するとともに、方向修正装置5の方向修正動作をさせるように、且つシュータ6に移送させる動作(以下、「方向修正移送動作」という)をさせるように制御するようになっている。
【0034】
このとき、前述の時間経過計測後に農作物Aの径が計測されないという結果が送信された場合には、農作物Aの長さが規定の長さではないと判定して、方向修正装置5に対して農作物Aをシュータ6に移送させないで通過させるように動作(以下、「非移送動作」という)させる制御をするようになっている。また、計測された大径側の径があらかじめ設定された径未満である場合には、農作物Aの長さが規定の径でないと判定して、方向修正装置5に対して農作物Aをシュータ6に移送させないで通過させるように動作(以下、「非移送動作」という)させる制御をするようになっている。
【0035】
図5〜図7は、方向修正装置5の概略構成及び動作を示す概略動作図である。方向修正装置5は、搬送される農作物Aの先端側を搬送方向下流側に向ける動作をするとともに、搬送される農作物Aの内、規格内の農作物Aをシュータ6に移送する動作をするものである。シュータ6は、その農作物Aの搬送方向を第2コンベア3Bの搬送方向と交差する方向となるように設置されており、方向修正装置5が第2コンベア3B上の農作物Aを、その先端側を搬送方向下流側に向けてシュータ6に移送するようになっている。尚、本発明では、方向修正装置5の構成について、例示する構成に限定するものではない。
【0036】
方向修正装置5は、農作物Aに接触状態及び非接触状態となるように回転自在に軸支されたフリッパ50と、前述の制御部の制御によって、フリッパ50を回転させる動力部の一例であるシリンダ51とを備えている。動力部は、例示するシリンダ51に限定するものではない。
【0037】
フリッパ50は、長さ方向が第2コンベア3Bの幅よりも長い板状に形成され、搬送方向上流側の端部が、第2コンベア3Bの幅方向側端部、且つ識別装置よりも搬送方向下流側に鉛直方向に沿って立設された支軸52に、この支軸52を中心として回転自在に支持されている。このフリッパ50は、通常、シリンダ51によって、非方向修正移送動作をする位置(以下、「基本位置P1」という)が保持されている。この基本位置P1を基準として、前述の制御部の制御によるシリンダ51の伸縮動作によって、方向修正移送動作及び非移送動作、並びにこれら両動作から基本位置P1に復帰する動作を行うようになっている。
【0038】
フリッパ50の基本位置P1は、農作物Aが接触するフリッパ50の接触面53が、長さ方向において、第2コンベア3Bの幅方向端部とほぼ平行となる位置である。この基本位置P1は、農作物Aをシュータ6に移送しないフリッパ50の非移送位置と同位置である。
【0039】
この基本位置P1からのフリッパ50の非方向修正移送動作は、農作物Aがフリッパ50の位置に至る前にシリンダ51を伸長させることによって、フリッパ50を搬送方向上流側に回転(図面上、時計方向の回転)させて、フリッパ50を非方向修正移送位置P2に移動させる動作である。フリッパ50の非方向修正移送位置P2は、接触面53が、長さ方向において第2コンベア3Bを斜めに横切り、搬送方向下流側の端部がシュータ6側を向く状態となる位置であり、フリッパ50の接触面53が第2コンベア3B上を搬送される農作物Aの先端と対面する位置である。
【0040】
このような非方向修正移送位置P2に保持されるフリッパ50によると、搬送される農作部Aの先端を接触面53に接触させることで、この農作物Aの搬送が止める。フリッパ50によって搬送が止められた農作物Aには、第2コンベア2Bの搬送力が作用しているので、この農作物Aを、その先端がシュータ6方向に向かい、且つ農作物Aの周面長手方向が斜めに横切る接触面53に沿った状態にし、この状態から第2コンベア2Bの搬送力によって、シュータ6に移送することができる。
【0041】
基本位置P1からのフリッパ50の方向修正移送動作は、茎側が搬送方向下流側を向いて搬送される農作物Aの先端側が、接触面53の搬送方向下流側の端部付近に至ったときに、シリンダ51を伸長させることによって、フリッパ50を搬送方向上流側に回転(図面上、時計方向の回転)させるとともに、接触面53の搬送方向下流側の端部で農作物Aの先端側の周面を叩く動作である。この方向修正移送動作におけるフリッパ50の回転量は、フリッパ50を基本位置P1から非方向修正移送位置P2に移動させる回転量と同じである。
【0042】
このように方向修正移送動作をするフリッパ50によると、このフリッパ50の回転にともなって接触面53が、茎側が搬送方向下流側を向いて搬送される農作物Aの先端側の周面を叩くことによって、農作物Aの先端をシュータ6に向かわせるように回転させて方向を修正するとともに、シュータ6に移送することができる。
【0043】
搬送される農作物Aが規格外のものである場合には、フリッパ50がその非移送位置である基本位置P1に保持され、搬送される規格外の農作物Aをシュータ6に移送せず、そのまま、第2コンベア3B上を搬送することができる。
【0044】
第2コンベア3Bの最下流側に、規格外の農作物Aを搬送する戻しコンベア3Cが連設されており、この戻しコンベア3Cに規格外の農作物を第2コンベア3Bから移送するようになっている。
【0045】
シュータ6は、方向修正装置5によって移送される農作物Aを滑らせて搬送するものであるとともに、フリッパ50の方向修正移送動作による農作物Aの方向修正を補助する機能を有するものである。尚、本発明では、シュータ6の構成について、例示する構成に限定するものではない。
【0046】
シュータ6は、農作物Aを滑らせて搬送する搬送通路60を備えている。シュータ6は、搬送方向上流側(第2コンベア3B側)の端部よりも、搬送方向下流側の端部を低く位置させることで、搬送通路60が傾斜するように設置されており、このように設置することによって、農作物Aを搬送通路60で滑らせて搬送できるようになっている。
【0047】
搬送通路60は、搬送方向下流側を幅狭とする先細り状になっており、幅方向両端部に傾斜面で構成された案内壁6A、6Bが立設されている。案内壁6Aは、移送された農作物Aを、先端側が搬送方向下流側に向け他状態を保持し、且つシュータ6外へ落とすことなく、搬送通路60方向に案内しながら、搬送下流側に滑らせて搬送することができる角度で設けられている。案内壁6Bは、移送された農作物Aのシュータ6外への落下防止ができる角度で設けられている。
【0048】
このように構成された農作物搬送システムBは、農作物搬送装置1によって、農作物Aの長手方向を搬送方向に沿うように整列搬送するとともに、この整列搬送した農作物Aを方向修正搬送装置2に搬送することができる。また、方向修正搬送装置2によって、農作物Aの方向を先端側が搬送方向下流側に向くように修正してシュータ6に移送することができるとともに、規格外の農作物Aをシュータ6に移送させないようにすることができる。また、シュータ6によって、農作物Aの先端側を搬送方向下流側に向けて、前述の搬送コンベアに搬送することができる。
【0049】
尚、本発明は、例示した実施の形態に限定するものではなく、特許請求の範囲の各項に記載された内容から逸脱しない範囲の構成による実施が可能である。
【符号の説明】
【0050】
A:農作物(長尺農作物)
2:方向修正搬送装置
3:コンベア
4:識別装置
5:方向修正装置
6:シュータ
50:フリッパ
51:シリンダ(動力部)
【特許請求の範囲】
【請求項1】
長尺農作物の長手方向を一方向として整列搬送するコンベアと、このコンベア上に設けられ、搬送される長尺農作物の長手方向の一端側の向きが搬送方向下流方向であるか否かを識別する識別装置と、同コンベア上、且つ識別装置の搬送方向下流側に設けられ、この選別装置で長手方向の一端側の向きが搬送方向下流側方向でないと識別された長尺農作物を、この長尺農作物の一端側の向きを搬送方向下流側方向に向かせるように修正しながら、コンベアの搬送方向と交差する方向に送り出すように動作する方向修正装置と、方向修正装置の長尺農作物を送り出す方向を搬送方向とし、この方向修正装置から向きが修正されて送り出される長尺農作物を、その向きを保った状態で搬送するように設けられたシュータとを備え、方向修正装置は、更に、選別装置で長尺農作物の長手方向の一端側の向きが搬送方向下流側方向であると識別された長尺農作物を、その向きを保った状態でシュータに送り出すように動作するようにされていることを特徴とする農作物の方向修正搬送装置。
【請求項2】
前記識別装置は、更に、搬送される前記長尺農作物が規格外のものであることを識別するものであり、この識別結果に基づいて前記方向修正装置が、前記長尺農作物を前記シュータに送り出さないように動作することを特徴とする請求項1記載の農作物の方向修正搬送装置。
【請求項3】
前記方向修正装置は、長さ方向が前記コンベアの幅よりも長い板状に形成され、搬送方向上流側の端部が、前記コンベアの幅方向側端部に鉛直方向に沿って立設された支軸に、該支軸を回転中心として回転自在に支持されたフリッパと、識別結果に基づいて前記フリッパを回転させる動作をする動力部とを備え、前記動力部の動力で回転する前記フリッパが、前記長尺農作物を叩くことによって、該長尺農作物の一端側の向きを搬送方向下流側に向くように修正するとともに、前記シュータに送り出し、前記動力部の動力で回転する前記フリッパが、長さ方向において前記コンベアを斜めに横切り、搬送方向下流側の端部が前記シュータ側を向く状態に保持されることによって、前記長尺農作物の一端側の向きを修正せずに、この長尺農作物をシュータに送り出すようにされていることを特徴とする請求項1又は2記載の農作物の方向修正搬送装置。
【請求項1】
長尺農作物の長手方向を一方向として整列搬送するコンベアと、このコンベア上に設けられ、搬送される長尺農作物の長手方向の一端側の向きが搬送方向下流方向であるか否かを識別する識別装置と、同コンベア上、且つ識別装置の搬送方向下流側に設けられ、この選別装置で長手方向の一端側の向きが搬送方向下流側方向でないと識別された長尺農作物を、この長尺農作物の一端側の向きを搬送方向下流側方向に向かせるように修正しながら、コンベアの搬送方向と交差する方向に送り出すように動作する方向修正装置と、方向修正装置の長尺農作物を送り出す方向を搬送方向とし、この方向修正装置から向きが修正されて送り出される長尺農作物を、その向きを保った状態で搬送するように設けられたシュータとを備え、方向修正装置は、更に、選別装置で長尺農作物の長手方向の一端側の向きが搬送方向下流側方向であると識別された長尺農作物を、その向きを保った状態でシュータに送り出すように動作するようにされていることを特徴とする農作物の方向修正搬送装置。
【請求項2】
前記識別装置は、更に、搬送される前記長尺農作物が規格外のものであることを識別するものであり、この識別結果に基づいて前記方向修正装置が、前記長尺農作物を前記シュータに送り出さないように動作することを特徴とする請求項1記載の農作物の方向修正搬送装置。
【請求項3】
前記方向修正装置は、長さ方向が前記コンベアの幅よりも長い板状に形成され、搬送方向上流側の端部が、前記コンベアの幅方向側端部に鉛直方向に沿って立設された支軸に、該支軸を回転中心として回転自在に支持されたフリッパと、識別結果に基づいて前記フリッパを回転させる動作をする動力部とを備え、前記動力部の動力で回転する前記フリッパが、前記長尺農作物を叩くことによって、該長尺農作物の一端側の向きを搬送方向下流側に向くように修正するとともに、前記シュータに送り出し、前記動力部の動力で回転する前記フリッパが、長さ方向において前記コンベアを斜めに横切り、搬送方向下流側の端部が前記シュータ側を向く状態に保持されることによって、前記長尺農作物の一端側の向きを修正せずに、この長尺農作物をシュータに送り出すようにされていることを特徴とする請求項1又は2記載の農作物の方向修正搬送装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−30917(P2012−30917A)
【公開日】平成24年2月16日(2012.2.16)
【国際特許分類】
【出願番号】特願2010−171056(P2010−171056)
【出願日】平成22年7月29日(2010.7.29)
【出願人】(592170558)訓子府機械工業株式会社 (7)
【Fターム(参考)】
【公開日】平成24年2月16日(2012.2.16)
【国際特許分類】
【出願日】平成22年7月29日(2010.7.29)
【出願人】(592170558)訓子府機械工業株式会社 (7)
【Fターム(参考)】
[ Back to top ]