
長期予測軌道データの信頼性判定方法、長期予測軌道データの提供方法及び情報提供装置
【課題】長期予測エフェメリスの信頼性を判定するための手法を提案すること。
【解決手段】測位システム1において、サーバシステム3は、外部システム2から受信したGPS衛星SVの予測位置のデータである衛星予測暦と、予測位置に対応するGPS衛星SVの実績位置のデータである衛星精密暦とを用いて、少なくとも1日以上の生成対象期間における衛星軌道を予測した長期予測エフェメリスの信頼性を判定する。そして、信頼性の判定結果を長期予測エフェメリスに含めて、携帯型電話機4に提供する。
【解決手段】測位システム1において、サーバシステム3は、外部システム2から受信したGPS衛星SVの予測位置のデータである衛星予測暦と、予測位置に対応するGPS衛星SVの実績位置のデータである衛星精密暦とを用いて、少なくとも1日以上の生成対象期間における衛星軌道を予測した長期予測エフェメリスの信頼性を判定する。そして、信頼性の判定結果を長期予測エフェメリスに含めて、携帯型電話機4に提供する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、長期予測軌道データの信頼性判定方法、長期予測軌道データの提供方法及び情報提供装置に関する。
【背景技術】
【0002】
測位用信号を利用した測位システムとしては、GPS(Global Positioning System)が広く知られており、携帯型電話機やカーナビゲーション装置等に内蔵された測位装置に利用されている。GPSでは、複数のGPS衛星の位置や各GPS衛星から自機までの擬似距離等の情報に基づいて自機の位置を示す3次元の座標値と時計誤差とを求める測位演算を行う。
【0003】
GPSによる測位では、先ず、GPS衛星から発信されるGPS衛星信号に重畳されているアルマナックやエフェメリスといった航法データに基づいて、GPS衛星の位置、速度、移動方向等の衛星情報を算出する。アルマナックは衛星を捕捉する際の有力な手掛かりとはなるが、衛星情報の精度が悪いため測位演算に使用しないのが一般的である。一方、エフェメリスは、衛星情報の精度が良いため、衛星を捕捉する際の有力な手掛かりとなるだけでなく、測位演算にも使用することができる。従って、例えばエフェメリスを保持していない状態で測位を開始した場合には、エフェメリスをGPS衛星信号から取得しなければならず、初回測位時間(TTFF:Time To First Fix)が増大する。
【0004】
そこで、サーバクライアントシステムであって、1週間といった長期間分のエフェメリスである長期予測エフェメリス(長期予測軌道データ)をサーバが予測し、クライアントである測位装置に提供する技術が開発されており、例えば特許文献1や特許文献2に開示されている。
【特許文献1】米国特許出願公開第2002/0188403号明細書
【特許文献2】米国特許出願公開第2005/0212700号明細書
【発明の開示】
【発明が解決しようとする課題】
【0005】
長期予測エフェメリスの定義方法としては、通常のエフェメリスと同様のデータフォーマットで定義する方法が考えられる。すなわち、衛星軌道の近似モデルの1つであるケプラーの楕円軌道モデルを用いて衛星軌道を近似し、その時のモデル式のパラメータ(以下、「衛星軌道パラメータ」と称す。)の値によって、長期予測エフェメリスを定義する方法である。測位用衛星の将来の位置を所定時間おきに時系列に予測した予測位置でなる衛星予測暦(予測位置データ)は、所定の商用システムから提供されている。ケプラーの楕円軌道モデルによる近似計算は、この衛星予測暦を用いて行うことが可能である。
【0006】
しかし、衛星予測暦に含まれる測位用衛星の予測位置は、将来になるほど、測位用衛星の実際位置からずれる傾向がある。そのため、ケプラーの楕円軌道モデルによる近似計算を行って長期予測エフェメリスを生成する場合に、近似計算により求めた衛星軌道は、生成日時から将来のものであるほど、実際の衛星軌道からずれたものとなる可能性がある。従来は、長期予測エフェメリスを一旦生成した後は、生成した長期予測エフェメリスの信頼性(測位に使用するのに適しているか否か)を判定する手法が存在しなかったため、サーバから長期予測エフェメリスを取得した測位装置は、信頼性の低い長期予測エフェメリスを使用して測位を行う場合があり得た。
【0007】
本発明は、上述した課題に鑑みて為されたものであり、長期予測エフェメリスの信頼性を判定するための手法を提案することを目的としている。
【課題を解決するための手段】
【0008】
以上の課題を解決するための第1の発明は、測位用衛星の予測位置を時系列に含んだ予測位置データと前記予測位置に対応する前記測位用衛星の実績位置を時系列に含んだ実績位置データとを用いて、少なくとも1日以上の対象期間における衛星軌道を予測した長期予測軌道データの信頼性を判定することを含む長期予測軌道データの信頼性判定方法である。
【0009】
また、他の発明として、少なくとも1日以上の対象期間における衛星軌道を予測した長期予測軌道データを生成する生成部と、測位用衛星の予測位置を時系列に含んだ予測位置データと前記予測位置に対応する前記測位用衛星の実績位置を時系列に含んだ実績位置データとを用いて、前記長期予測軌道データの信頼性を判定する判定部と、前記長期予測軌道データと前記判定部による判定結果とを測位装置に提供する提供部と、を備えた情報提供装置を構成してもよい。
【0010】
この第1の発明等によれば、測位用衛星の予測位置を時系列に含んだ予測位置データと予測位置に対応する測位用衛星の実績位置を時系列に含んだ実績位置データとを用いて、少なくとも1日以上の対象期間における衛星軌道を予測した長期予測軌道データの信頼性を判定する。
【0011】
測位用衛星の実績位置は、測位用衛星の実際にいた位置である。そのため、測位用衛星の予測位置と実績位置との差が大きい場合は、予測位置の正確性が低く、この予測位置に基づいて予測した予測衛星軌道の信頼性は低いと言える。従って、予測位置データと実績位置データとを用いることで、長期予測軌道データの信頼性を適切に判定することが可能となる。
【0012】
また、第2の発明として、第1の発明の長期予測軌道データの信頼性判定方法であって、前記長期予測軌道データは、前記対象期間を区切ったN個の所定期間における衛星軌道を予測したデータでなり、前記判定することは、前記予測位置データに含まれる予測位置を前記所定期間と同じ長さの期間毎に時系列にグループ分けした場合の第M期間(M=1,2,・・・,N)の予測位置と当該予測位置に対応する前記実績位置とを用いて、前記長期予測軌道データの第M期間のデータの信頼性を判定することである長期予測軌道データの信頼性判定方法を構成してもよい。
【0013】
この第2の発明によれば、予測位置データに含まれる予測位置を所定期間と同じ長さの期間毎に時系列にグループ分けした場合の第M期間の予測位置と当該予測位置に対応する実績位置とを用いて、長期予測軌道データの第M期間のデータの信頼性を判定する。すなわち、予測位置が属する期間と、長期予測軌道データに含まれるデータの期間とを1対1に対応付けて、長期予測軌道データの信頼性を判定することになる。
【0014】
また、第3の発明として、第2の発明の長期予測軌道データの信頼性判定方法であって、前記予測位置データには、予測を行った日時が異なる複数の予測位置データがあり、前記判定することには、前記複数の予測位置データについて当該予測位置データに含まれる第M期間の予測位置と当該予測位置に対応する前記実績位置との差を算出して、第M期間における予測位置と実績位置との差を分析することと、前記分析結果を用いて、前記長期予測軌道データの第M期間のデータの信頼性を判定することと、が含まれる長期予測軌道データの信頼性判定方法を構成してもよい。
【0015】
この第3の発明によれば、複数の予測位置データについて当該予測位置データに含まれる第M期間の予測位置と当該予測位置に対応する実績位置との差を算出して、第M期間における予測位置と実績位置との差を分析する。そして、その分析結果を用いて、長期予測軌道データの第M期間のデータの信頼性を判定する。予測位置と実績位置との差が大きい期間に対応する期間は、長期予測軌道データの信頼性が低いと判断することができる。
【0016】
また、第4の発明として、第3の発明の長期予測軌道データの信頼性判定方法であって、前記予測位置と前記実績位置との差を、所与の観測位置から前記予測位置までの距離と前記観測位置から前記実績位置までの距離との差として算出することを更に含む長期予測軌道データの信頼性判定方法を構成してもよい。
【0017】
この第4の発明によれば、予測位置と実績位置との差を、所与の観測位置から予測位置までの距離と観測位置から実績位置までの距離との差として算出する。これにより、衛星位置の差を用いるのではなく、観測位置からの距離の差を用いて長期予測軌道データの信頼性を判定することができる。
【0018】
また、第5の発明として、第3の発明の長期予測軌道データの信頼性判定方法であって、前記予測位置と前記実績位置との差を、前記観測位置から前記予測位置までの距離に、当該予測位置における前記測位用衛星の時計予測誤差分の計測距離誤差を加味した距離と、前記観測位置から前記実績位置までの距離に、当該実績位置における前記測位用衛星の時計実績誤差分の計測距離誤差を加味した距離との差として算出することを更に含む長期予測軌道データの信頼性判定方法を構成してもよい。
【0019】
この第5の発明によれば、予測位置と実績位置との差を、観測位置から予測位置までの距離に、当該予測位置における測位用衛星の時計予測誤差分の計測距離誤差を加味した距離と、観測位置から実績位置までの距離に、当該実績位置における測位用衛星の時計実績誤差分の計測距離誤差を加味した距離との差として算出する。これにより、測位用衛星の時計誤差分を加味した観測距離の差を用いて長期予測軌道データの信頼性を判定することができる。
【0020】
また、第6の発明として、第4又は第5の発明の長期予測軌道データの信頼性判定方法であって、前記予測位置を地球上に投影した位置と前記実績位置を地球上に投影した位置との中間位置を前記観測位置として算出することを更に含む長期予測軌道データの信頼性判定方法を構成してもよい。
【0021】
この第6の発明によれば、予測位置を地球上に投影した位置と実績位置を地球上に投影した位置との中間位置を観測位置として算出する。測位用衛星は地球を周回しており、ある位置に対する測位用衛星の仰角は変化するため、観測位置を固定とするのは適切ではない。そのため、いわゆる標高投影法に基づいて、観測位置を決定することにしたものである。
【0022】
また、第7の発明として、長期予測軌道データを生成することと、第1〜第6の何れかの発明の長期予測軌道データの信頼性判定方法を用いて、前記生成した長期予測軌道データの信頼性を判定することと、前記生成した長期予測軌道データと前記判定した判定結果とを測位装置に提供することと、を含む長期予測軌道データの提供方法を構成してもよい。
【0023】
この第7の発明によれば、長期予測軌道データを生成する。そして、上述した長期予測軌道データの信頼性判定方法を用いて、生成した長期予測軌道データの信頼性を判定し、生成した長期予測軌道データと判定した判定結果とを測位装置に提供する。これにより、測位装置は、提供された長期予測軌道データの信頼性を参照し、信頼性の低いデータを測位に利用しないようにすることができる。
【発明を実施するための最良の形態】
【0024】
以下、図面を参照して、本発明に好適な実施形態の一例を説明する。但し、本発明を適用可能な実施形態がこれに限定されるわけではない。
【0025】
図1は、各実施形態に共通する測位システム1の概略構成を示す図である。測位システム1は、外部システム2と、情報提供装置の一種であるサーバシステム3と、測位装置を備えた電子機器の一種である携帯型電話機4と、測位用衛星の一種である複数のGPS衛星SV(SV1,SV2,SV3,SV4,・・・)とを備えて構成される。尚、携帯型電話機4が必要なデータをサーバシステム3から取得した後は、携帯型電話機4とGPS衛星SVとで測位が可能であるため、携帯型電話機4とGPS衛星SVとで1つの測位システムが構成されるということもできる。また、地上側のシステムとして、サーバシステム3と携帯型電話機4とで測位システムと呼ぶこともできる。
【0026】
外部システム2は、GPS衛星SVから定期的に衛星信号を受信し、当該衛星信号に含まれる航法データ等に基づいて衛星予測暦を生成してサーバシステム3に提供する公知のシステムである。外部システム2が提供する衛星予測暦は、各GPS衛星SVそれぞれについて、将来の位置を予測した予測位置及びGPS衛星SVに搭載された原子時計の誤差を予測した時計予測誤差を所定時間おき(例えば15分おき)に時系列に並べた位置のデータである。
【0027】
また、外部システム2は、将来のデータとしての衛星予測暦を提供する他に、過去の事実のデータも提供する。すなわち、外部システム2は、GPS衛星SVの実際の位置である実績位置及びGPS衛星SVに搭載された原子時計の実際の誤差である時計実績誤差を含む衛星精密暦を過去の事実のデータとして生成して、サーバシステム3に提供する。実績位置及び時計実績誤差の算出方法については公知であるため、詳細な説明を省略する。外部システム2は、例えば衛星予測暦や衛星精密暦の提供を業務とする民間や公営の団体のコンピュータシステムに相当する。
【0028】
サーバシステム3は、衛星予測暦及び衛星精密暦を外部システム2から取得し、当該衛星予測暦及び衛星精密暦を用いて、全てのGPS衛星SVの予測されるエフェメリスであって、少なくとも1日分以上の例えば1週間といった長期間有効なエフェメリス(以下、本実施形態において「長期予測エフェメリス」と称す。長期間有効な軌道でもあるため、長期予測軌道データとも言える。)を生成・提供するサーバを備えたシステムである。
【0029】
携帯型電話機4は、ユーザが通話やメールの送受信等を行うための電子機器であり、通話やメールの送受信といった携帯型電話機としての本来の機能の他、位置を計測する機能(測位機能)をなす測位装置を具備している。携帯型電話機4は、ユーザ操作に従って、サーバシステム3に対して長期予測エフェメリスの要求信号を送信し、サーバシステム3から長期予測エフェメリスを受信する。そして、受信した長期予測エフェメリスを用いてGPS衛星SVを捕捉し、衛星信号に基づく測位演算を実行する。
【0030】
1.第1実施形態
1−1.原理
サーバシステム3は、外部システム2から取得した衛星予測暦を用いて、長期予測エフェメリスを生成する処理を行う。具体的には、長期予測エフェメリスの生成日時を基準として1週間後までの期間を生成対象期間とし、当該生成対象期間を衛星軌道の近似・モデル化を行う複数の期間(以下、「予測対象期間」と称す。)に区切る。本実施形態では、予測対象期間の長さを一律に6時間とする。すなわち、1週間の生成対象期間を6時間毎に28個の予測対象期間(第1予測対象期間〜第28予測対象期間)に区切る。
【0031】
そして、サーバシステム3は、外部システム2から取得した衛星予測暦に含まれる予測位置のうち、各予測対象期間に対応する期間の予測位置を抽出する。そして、抽出した全ての予測位置からの距離の二乗和が最小となるようなケプラーの衛星軌道モデル式(以下、「近似モデル」ともいう。)を各予測対象期間それぞれについて求める。このとき求めた衛星軌道の近似モデル式のパラメータを「衛星軌道パラメータ」と称し、近似モデルを算出する計算を「近似計算」ともいう。また、近似計算により求めた予測された衛星軌道のことを「予測軌道」と称する。長期予測エフェメリスは、全てのGPS衛星の全ての予測対象期間の衛星軌道パラメータの値が格納されたデータである。
【0032】
衛星予測暦に含まれるGPS衛星SVの予測位置は、将来になるほど、GPS衛星SVの実際の位置からずれる傾向がある。そのため、近似計算を行って長期予測エフェメリスを生成した場合に、近似計算により求めた予測軌道は、生成日時から将来のものであるほど、実際の衛星軌道からずれたものとなる可能性がある。
【0033】
本実施形態では、サーバシステム3は、各GPS衛星の各予測対象期間について、予測軌道の信頼性を示す指標値である「予測軌道信頼度」を決定し、決定した予測軌道信頼度を信頼性パラメータとして長期予測エフェメリスに含めて携帯型電話機4に提供する。本実施形態では、予測軌道信頼度は「0」〜「12」の13段階で表され、「0」が予測軌道の信頼性が最も高く、「12」が予測軌道の信頼性が最も低いことを示している。尚、予測軌道信頼度の数値範囲は適宜設定変更可能であり、例えば「0」〜「15」の16段階で表すこととしてもよい。予測軌道信頼度は、エフェメリスに含まれている「URA index」に相当する値である。
【0034】
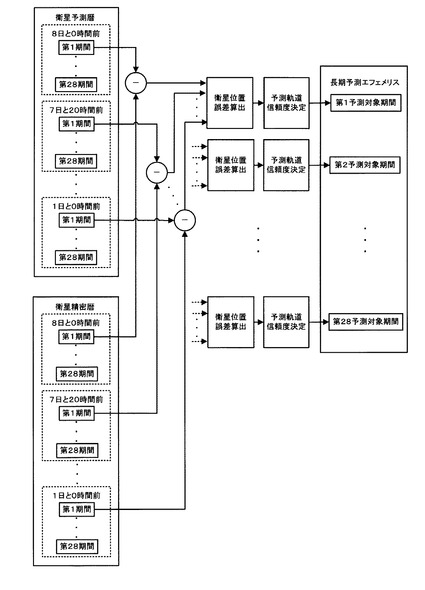
図2は、予測軌道信頼度の具体的な決定方法を説明するための図である。分かり易くするため、長期予測エフェメリスのうち、第1予測対象期間のデータを生成する流れを中心に記載してある。本実施形態では、開始日時の異なる複数の衛星予測暦と、それらの衛星予測暦に対応する衛星精密暦(開始日時が同じ衛星精密暦)との組合せ(以下、「衛星暦組合せ」と称す。)を用いて、長期予測エフェメリスに含める予測軌道信頼度を決定する。開始日時とは、衛星予測暦及び衛星精密暦にそれぞれ含まれる衛星位置のうち最も古い衛星位置の日時である。
【0035】
本実施形態では、開始日時が4時間ずつずれた衛星予測暦と、それらに対応する衛星精密暦を用いて予測軌道信頼度を決定する。また、衛星予測暦及び衛星精密暦には、それぞれ1週間分の衛星位置及び時計誤差のデータが含まれており、便宜的に、この1週間を6時間毎にグループ分けした28個の期間を「第1期間〜第28期間」と表現する。但し、実際には、衛星予測暦及び衛星精密暦のデータは、衛星位置及び時計誤差が羅列的に配列されたデータ構造となっており、期間毎にグループ分けされているわけではない。
【0036】
予測軌道信頼度は、例えば、開始日時が異なる1週間分の衛星暦組合せを用いて決定することができる。具体的には、現在日時から見て、8日と0時間前を開始日時とする衛星暦組合せ、7日と20時間前を開始日時とする衛星暦組合せ、7日と16時間前を開始日時とする衛星暦組合せ、・・・、1日と0時間前を開始日時とする衛星暦組合せといった具合に、開始日時が4時間毎に異なる1週間分の衛星暦組合せを抽出する。
【0037】
そして、各衛星暦組合せそれぞれについて、当該衛星予測暦に含まれる各日時(衛星予測暦に含まれる15分おきの日時)における予測位置と、当該衛星精密暦に含まれる各日時(衛星精密暦に含まれる15分おきの日時)における実績位置間の距離(以下、「衛星位置間距離」と称す。)を、第1期間〜第28期間それぞれについて算出する。すなわち、第1期間は第1期間同士、第2期間は第2期間同士、各日時における衛星位置間距離を算出する。
【0038】
そして、全ての衛星暦組合せについて算出した衛星位置間距離を用いて、「衛星位置誤差」を算出する。衛星位置誤差は、例えば、全ての衛星暦組合せについて算出した衛星位置間距離の平均値とすることができる。予測軌道信頼度は、衛星位置誤差の大きさに基づいて決定する。衛星位置誤差が大きいほど、予測軌道の信頼性は低い。従って、予測軌道信頼度は、衛星位置誤差が大きいほど大きな値(予測軌道信頼度は値が大きいほど信頼性が低いことを意味する。)となるように決定する。
【0039】
最後に、衛星暦組合せの第1期間〜第28期間を、長期予測エフェメリスの第1予測対象期間〜第28予測対象期間にそれぞれ対応させる。そして、各期間について決定された予測軌道信頼度を対応する予測対象期間における予測軌道信頼度として、長期予測エフェメリスに格納する。
【0040】
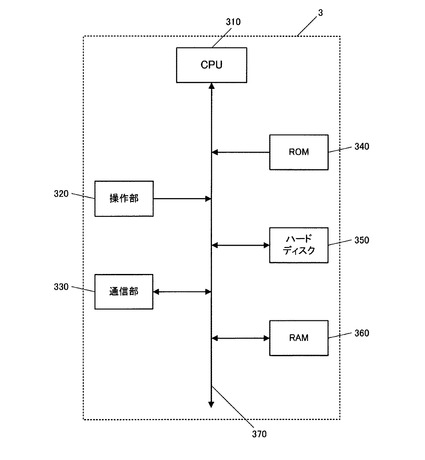
1−2.機能構成
図3は、サーバシステム3の機能構成を示すブロック図である。サーバシステム3は、CPU(Central Processing Unit)310と、操作部320と、通信部330と、ROM(Read Only Memory)340と、ハードディスク350と、RAM(Random Access Memory)360とを備え、各部がバス370で接続されたコンピュータシステムである。
【0041】
CPU310は、ROM340に記憶されているシステムプログラム等に従ってサーバシステム3の各部を統括的に制御するプロセッサである。本実施形態では、CPU310は、ROM340に記憶されている長期予測エフェメリス提供プログラム341に従って、携帯型電話機4に長期予測エフェメリスを提供する処理を行う。
【0042】
操作部320は、サーバシステム3の管理者による操作指示を受け付け、操作に応じた信号をCPU310に出力する入力装置である。この機能は、例えばキーボードやボタン、マウス等により実現される。
【0043】
通信部330は、システム内部で利用される各種データをインターネット等の通信ネットワークを介して外部システム2や携帯型電話機4とやり取りするための通信装置である。
【0044】
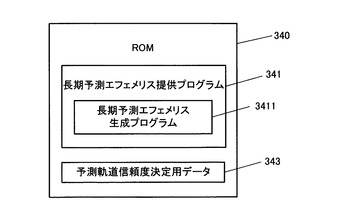
ROM340は、読み取り専用の不揮発性の記憶装置であり、CPU310がサーバシステム3を制御するためのシステムプログラムや、長期予測エフェメリスを携帯型電話機4に提供するためのプログラム、長期予測エフェメリスを生成するためのプログラム等の各種プログラムや各種データ等を記憶している。
【0045】
ハードディスク350は、磁気ヘッド等を用いてデータの読み書きを行う記憶装置であり、ROM340と同様、サーバシステム3が備える各種機能を実現するためのプログラムやデータ等を記憶している。
【0046】
RAM360は、読み書き可能な揮発性の記憶装置であり、CPU310により実行されるシステムプログラム、長期予測エフェメリス提供プログラム、各種処理プログラム、各種処理の処理中データ、処理結果などを一時的に記憶するワークエリアを形成している。
【0047】
1−3.データ構成
図4は、ROM340に格納されたデータの一例を示す図である。ROM340には、CPU310により読み出され、長期予測エフェメリス提供処理(図12参照)として実行される長期予測エフェメリス提供プログラム341と、予測軌道信頼度決定用データ343とが記憶されている。また、長期予測エフェメリス提供プログラム341には、長期予測エフェメリス生成処理(図13及び図14参照)として実行される長期予測エフェメリス生成プログラム3411がサブルーチンとして含まれている。
【0048】
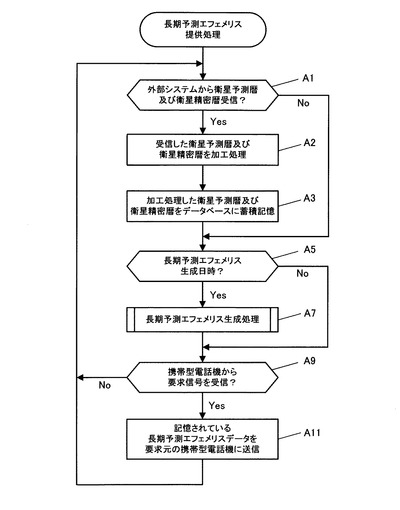
長期予測エフェメリス提供処理とは、CPU310が、長期予測エフェメリスデータ357を生成する処理を定期的に行い、携帯型電話機4から長期予測エフェメリスデータ357の要求信号を受信した場合に、生成しておいた長期予測エフェメリスデータ357を要求元の携帯型電話機4に送信する処理である。長期予測エフェメリス提供処理については、フローチャートを用いて詳細に後述する。
【0049】
長期予測エフェメリス生成処理とは、CPU310が、長期予測エフェメリスデータ357を生成する処理である。本実施形態では、CPU310は、長期予測エフェメリスデータ357を4時間に1回生成する。長期予測エフェメリス生成処理についても、フローチャートを用いて詳細に後述する。
【0050】
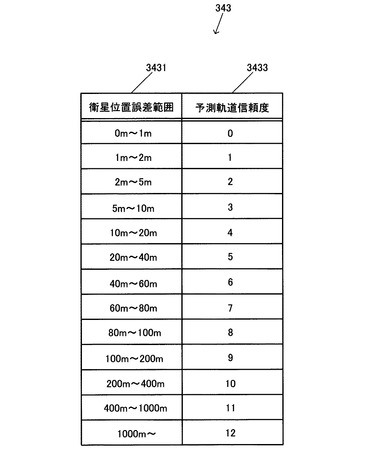
図6は、予測軌道信頼度決定用データ343のデータ構成の一例を示す図である。予測軌道信頼度決定用データ343には、衛星位置誤差が含まれる範囲である衛星位置誤差範囲3431と、衛星位置誤差が当該衛星位置誤差範囲3431に含まれる場合に設定する予測軌道信頼度3433とが対応付けて記憶されている。
【0051】
衛星予測暦及び衛星精密暦でなる衛星暦組合せそれぞれについて、各予測位置と、その予測位置の日時に対応する日時における実績位置との間の距離(衛星位置間距離)を求める。そして、求めた衛星位置間距離の平均値が衛星位置誤差となる。衛星位置誤差は、衛星暦組合せ毎に求める。
【0052】
予測軌道信頼度3433は、原理で説明したように、予測軌道の信頼性を示す指標値の一種であり、例えば「0」〜「12」の13段階で表され、「0」が予測軌道の信頼性が最も高く、「12」が予測軌道の信頼性が最も低いことを意味している。例えば、衛星位置誤差3431が「20m〜40m」の範囲に含まれる場合は、予測軌道信頼度3433として「5」が設定される。
【0053】
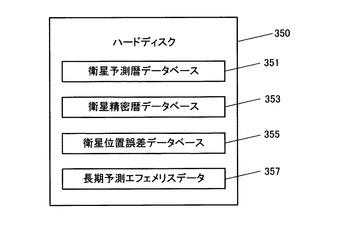
図5は、ハードディスク350に格納されたデータの一例を示す図である。ハードディスク350には、衛星予測暦データベース351と、衛星精密暦データベース353と、衛星位置誤差データベース355と、長期予測エフェメリスデータ357とが記憶されている。
【0054】
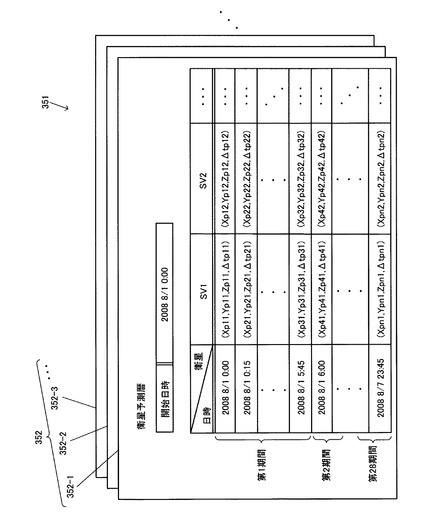
図7は、衛星予測暦データベース351のデータ構成の一例を示す図である。衛星予測暦データベース351は、複数の衛星予測暦352(352−1,352−2,352−3,・・・)が時系列に記憶されている。衛星予測暦352は、各GPS衛星SVの1週間後までの予測位置及び時計予測誤差が15分おきに記憶された離散的なデータであり、開始日時毎に纏められたデータである。便宜的に、1週間の期間を6時間毎にグループ分けすることで、第1期間〜第28期間の28個の期間が構成される。
【0055】
例えば、衛星予測暦352−1は、予測の開始日時が「2008年8月1日0時00分」のデータである。そして、「2008年8月1日5時45分」におけるGPS衛星「SV2」の予測位置は「(Xp32,Yp32,Zp32)」であり、原子時計の予測誤差は「Δtp32」である。
【0056】
CPU310は、外部システム2から定期的に(例えば4時間に1回)衛星予測暦を受信する。そして、受信した衛星予測暦を衛星予測暦データベース351に蓄積・記憶するためにデータフォーマットの加工処理等を行う。具体的には、開始日時が異なり、長期予測エフェメリスの生成対象期間(例えば1週間)と同じ期間分のデータが格納された複数の衛星予測暦352を生成して、衛星予測暦データベース351に蓄積・記憶させる。
【0057】
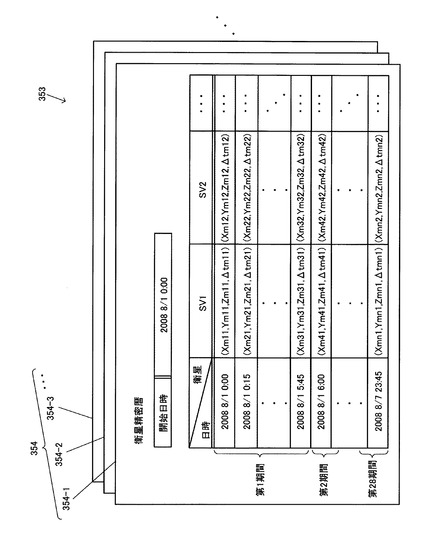
図8は、衛星精密暦データベース353のデータ構成の一例を示す図である。衛星精密暦データベース353には、複数の衛星精密暦354(354−1,354−2,354−3,・・・)が時系列に記憶されている。衛星精密暦354は、各GPS衛星SVの1週間分の実績位置及び時計実績誤差が15分おきに記憶された離散的なデータであり、開始日時毎に纏められたデータである。1週間の期間を6時間毎にグループ分けすることで、第1期間〜第28期間の28個の期間が構成される。
【0058】
例えば、衛星精密暦354−1は、計測の開始日時が「2008年8月1日0時00分」のデータである。そして、「2008年8月1日5時45分」におけるGPS衛星「SV2」の実績位置は「(Xm32,Ym32,Zm32)」であり、原子時計の実際誤差は「Δtm32」であった。
【0059】
CPU310は、外部システム2から定期的に(例えば4時間に1回)衛星精密暦を受信する。そして、受信した衛星精密暦を衛星精密暦データベース353に蓄積・記憶するためにデータフォーマットの加工処理等を行う。具体的には、衛星予測暦データベース351に格納されている複数の衛星予測暦352と開始日時が対応する衛星精密暦354を生成して、衛星精密暦データベース353に蓄積・記憶させる。
【0060】
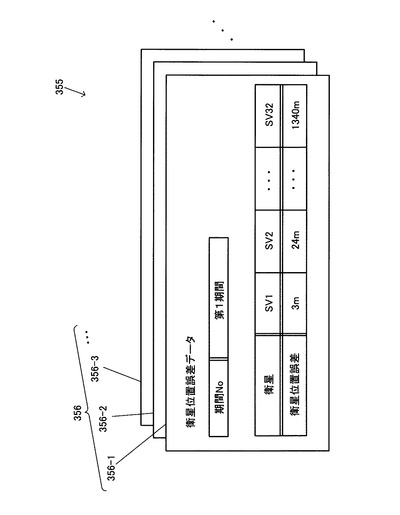
図9は、衛星位置誤差データベース355のデータ構成の一例を示す図である。衛星位置誤差データベース355は、複数の衛星位置誤差データ356(356−1,356−2,356−3,・・・)が期間別に記憶されたデータである。各衛星位置誤差データ356には、当該期間の番号と、当該期間における各GPS衛星(SV1〜SV32)の衛星位置誤差とが対応付けて記憶されている。
【0061】
例えば、衛星位置誤差データ356−1は、第1期間のデータである。また、第1期間におけるGPS衛星「SV2」の衛星位置誤差は「24m」である。CPU310は、長期予測エフェメリス生成処理において、衛星予測暦352に含まれる予測位置と、当該衛星予測暦352に対応する期間の衛星精密暦354に含まれる実績位置とを用いて、各期間における各GPS衛星SVの衛星位置誤差を算出する。そして、算出した衛星位置誤差を格納した衛星位置誤差データ356を生成して、衛星位置誤差データベース355に蓄積・記憶させる。
【0062】
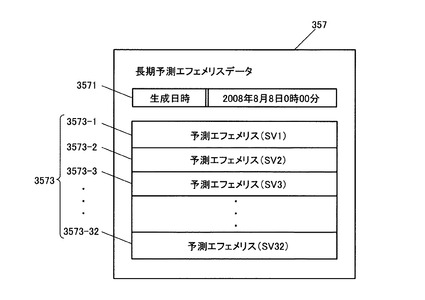
図10は、長期予測エフェメリスデータ357のデータ構成の一例を示す図である。長期予測エフェメリスデータ357には、長期予測エフェメリスデータの生成日時3571と、GPS衛星SV1〜SV32の予測エフェメリス3573(3573−1〜3573−32)とが対応付けて記憶されている。
【0063】
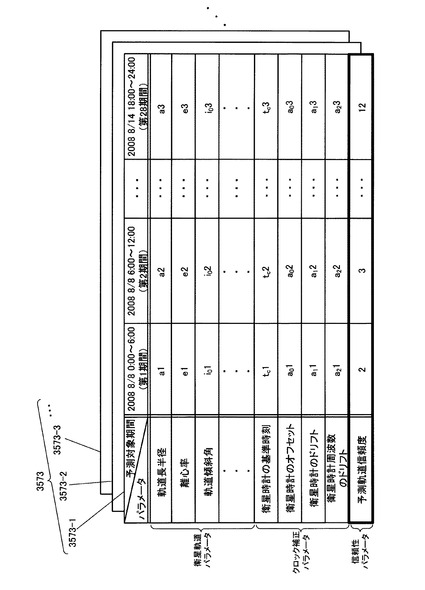
図11は、予測エフェメリス3573のデータ構成の一例を示す図である。予測エフェメリス3573(3573−1,3573−2,・・・,3573−32)には、各予測対象期間それぞれについて、軌道長半径や離心率、軌道傾斜角といったケプラーの衛星軌道パラメータの値と、衛星時計の基準時刻、衛星時計のオフセット、衛星時計のドリフト及び衛星時計周波数のドリフトでなるクロック補正パラメータの値と、信頼性パラメータである予測軌道信頼度とが記憶されている。
【0064】
CPU310は、長期予測エフェメリス生成処理において、各GPS衛星SVについて、予測対象期間毎に衛星軌道パラメータ、クロック補正パラメータ及び信頼性パラメータの値を算出して予測エフェメリス3573を生成する。そして、全てのGPS衛星SVについて生成した予測エフェメリス3573を纏めて、生成日時3571と対応付けて長期予測エフェメリスデータ357を生成して、ハードディスク350に記憶させる。
【0065】
1−4.処理の流れ
図12は、ROM340に記憶されている長期予測エフェメリス提供プログラム341がCPU310により読み出されて実行されることで、サーバシステム3において実行される長期予測エフェメリス提供処理の流れを示すフローチャートである。
【0066】
先ず、CPU310は、外部システム2から衛星予測暦及び衛星精密暦を受信したか否かを判定し(ステップA1)、受信しなかったと判定した場合は(ステップA1;No)、ステップA5へと処理を移行する。
【0067】
また、受信したと判定した場合は(ステップA1;Yes)、CPU310は、受信した衛星予測暦及び衛星精密暦に加工処理を施し、開始日時及び期間が同一である複数の衛星予測暦352及び衛星精密暦354を生成する(ステップA2)。そして、生成した衛星予測暦352及び衛星精密暦354を、ハードディスク350の衛星予測暦データベース351及び衛星精密暦データベース353にそれぞれ蓄積記憶させる(ステップA3)。
【0068】
次いで、CPU310は、長期予測エフェメリスの生成日時であるか否かを判定する(ステップA5)。本実施形態では、4時間に1回長期予測エフェメリスを生成するものとする。そして、まだ生成日時ではないと判定した場合は(ステップA5;No)、CPU310は、ステップA9へと処理を移行する。
【0069】
また、長期予測エフェメリスの生成日時であると判定した場合は(ステップA5;Yes)、CPU310は、ROM340に記憶されている長期予測エフェメリス生成プログラム3411を読み出して実行することで、長期予測エフェメリス生成処理を行う(ステップA7)。
【0070】
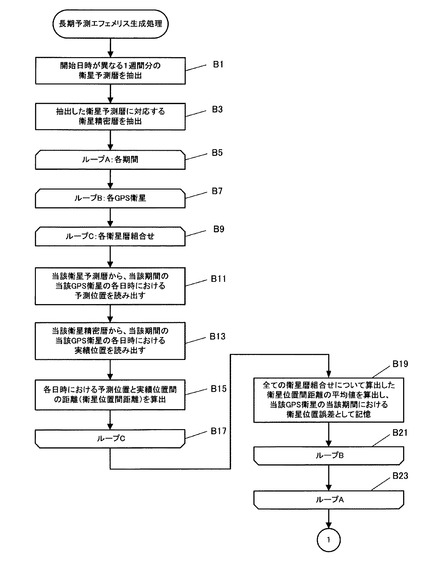
図13及び図14は、長期予測エフェメリス生成処理の流れを示すフローチャートである。
先ず、CPU310は、ハードディスク350の衛星予測暦データベース351から、開始日時が異なる1週間分の衛星予測暦352を抽出する(ステップB1)。また、抽出した衛星予測暦352に対応する衛星精密暦354を抽出する(ステップB3)。
【0071】
次いで、CPU310は、第1〜第28期間それぞれについて、ループAの処理を実行する(ステップB5〜B23)。ループAの処理では、CPU310は、各GPS衛星SVについて、ループBの処理を行い(ステップB7〜B21)、ループBの処理では、各衛星暦組合せについて、ループCの処理を実行する(ステップB9〜B17)。
【0072】
ループCの処理では、CPU310は、当該衛星予測暦352から、当該期間の当該GPS衛星の各日時における予測位置を読み出す(ステップB11)。また、CPU310は、当該衛星精密暦354から、当該期間の当該GPS衛星の各日時における実績位置を読み出す(ステップB13)。
【0073】
次いで、CPU310は、各日時について、ステップB11で読み出した予測位置と、ステップB13で読み出した実績位置間の距離(衛星位置間距離)を算出する(ステップB15)。そして、CPU310は、次の衛星暦組合せへと処理を移行する。
【0074】
全ての衛星暦組合せについてステップB11〜B15の処理を行った後、CPU310は、ループCの処理を終了する(ステップB17)。その後、CPU310は、全ての衛星暦組合せについてステップB15で算出した衛星位置間距離の平均値を算出し、当該GPS衛星の当該期間における衛星位置誤差とし、衛星位置誤差データベース355に衛星位置誤差データ356として記憶させる(ステップB19)。そして、CPU310は、次のGPS衛星へと処理を移行する。
【0075】
全てのGPS衛星についてステップB9〜B19の処理を行った後、CPU310は、ループBの処理を終了する(ステップB21)。また、CPU310は、全ての期間についてステップB7〜B21の処理を行った後、ループAの処理を終了する(ステップB23)。
【0076】
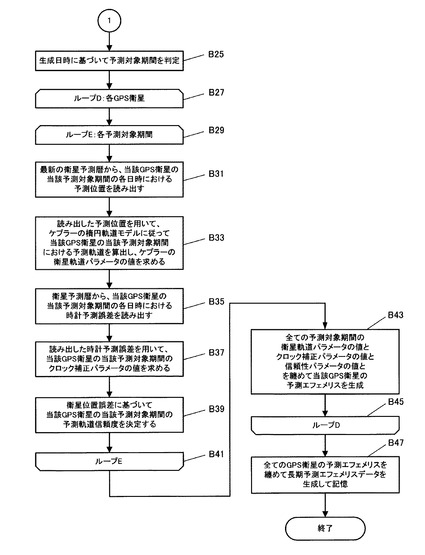
その後、CPU310は、長期予測エフェメリスの今回の生成日時(現在日時)に基づいて各予測対象期間を判定する(ステップB25)。すなわち、今回の生成日時から1週間後までの期間を生成対象期間とし、当該生成対象期間を6時間毎に区切った各期間を予測対象期間と判定する。
【0077】
次いで、CPU310は、各GPS衛星SVそれぞれについて、ループDの処理を実行する(ステップB27〜B45)。ループDの処理では、CPU310は、ステップB25で判定した各予測対象期間それぞれについて、ループEの処理を実行する(ステップB29〜B41)。
【0078】
ループEの処理では、CPU310は、ハードディスク350の衛星予測暦データベース351に記憶されている最新の衛星予測暦352から、当該GPS衛星SVの当該予測対象期間の各日時における予測位置を読み出す(ステップB31)。そして、CPU310は、読み出した予測位置を用いて、ケプラーの楕円軌道モデルに従って当該GPS衛星SVの当該予測対象期間における予測軌道を算出し、ケプラーの衛星軌道パラメータの値を求める(ステップB33)。尚、予測軌道の具体的な算出方法については公知であるため、詳細な説明を省略する。
【0079】
その後、CPU310は、最新の衛星予測暦352から、当該GPS衛星SVの当該予測対象期間の各日時における時計予測誤差を読み出す(ステップB35)。そして、CPU310は、読み出した時計予測誤差を用いて、当該GPS衛星の当該予測対象期間のクロック補正パラメータの値を求める(ステップB37)。
【0080】
時刻「t」における時計予測誤差「Δt」は、クロック補正パラメータである衛星時計の基準時刻「tc」、衛星時計のオフセット「a0」、衛星時計のドリフト「a1」及び衛星時計周波数のドリフト「a2」を用いて、次式(1)によって近似することができる。
Δt=a0+a1(t−tc)+a2(t−tc)2 ・・・(1)
【0081】
式(1)は、時計予測誤差の経時変化を近似するための時計誤差モデル式である。衛星予測暦352に含まれる各日時の時計予測誤差「Δt」をサンプリングデータとして、例えば最小二乗法を用いた近似計算を行うことで、クロック補正パラメータの値を算出することができる。
【0082】
次に、CPU310は、衛星位置誤差データベース355の衛星位置誤差データ356に記憶されている衛星位置誤差に基づいて、当該GPS衛星の当該予測対象期間の予測軌道信頼度を決定する(ステップB39)。具体的には、ROM340に記憶されている予測軌道信頼度決定用データ343を参照し、衛星位置誤差が含まれる衛星位置誤差範囲3431を判定する。そして、判定した衛星位置誤差範囲3431に対応する予測軌道信頼度3433を、当該GPS衛星の当該予測対象期間の予測軌道信頼度に決定する。その後、CPU310は、次の予測対象期間へと処理を移行する。
【0083】
全ての予測対象期間についてステップB31〜B39の処理を行った後、CPU310は、ループEの処理を終了する(ステップB41)。その後、CPU310は、全ての予測対象期間についてステップB33で求めた衛星軌道パラメータの値と、ステップB37で求めたクロック補正パラメータの値と、ステップB39で決定した信頼性パラメータの値である予測軌道信頼度とを纏めて当該GPS衛星SVの予測エフェメリス3573を生成する(ステップB43)。そして、CPU310は、次のGPS衛星SVへと処理を移行する。
【0084】
全てのGPS衛星SVについてステップB29〜B43の処理を行った後、CPU310は、ループDの処理を終了する(ステップB45)。その後、CPU310は、全てのGPS衛星SVについてステップB43で生成した予測エフェメリス3573を纏めて、生成日時3571と対応付けて長期予測エフェメリスデータ357を生成し、ハードディスク350に記憶させる(ステップB47)。そして、CPU310は、長期予測エフェメリス生成処理を終了する。
【0085】
図12の長期予測エフェメリス提供処理に戻って、長期予測エフェメリス生成処理を行った後、CPU310は、携帯型電話機4から長期予測エフェメリスデータ357の要求信号を受信したか否かを判定する(ステップA9)。そして、受信しなかったと判定した場合は(ステップA9;No)、ステップA1に戻る。
【0086】
また、要求信号を受信したと判定した場合は(ステップA9;Yes)、CPU310は、ハードディスク350に記憶されている長期予測エフェメリスデータ357を要求元の携帯型電話機4に送信する(ステップA11)。そして、CPU310は、ステップA1に戻る。
【0087】
1−5.作用効果
第1実施形態によれば、測位システム1において、サーバシステム3は、外部システム2から受信したGPS衛星SVの予測位置のデータである衛星予測暦と、予測位置に対応するGPS衛星SVの実績位置のデータである衛星精密暦とを用いて、少なくとも1日以上の生成対象期間における衛星軌道を予測した長期予測エフェメリスの信頼性を判定する。そして、信頼性の判定結果を長期予測エフェメリスに含めて、携帯型電話機4に提供する。
【0088】
具体的には、長期予測エフェメリスの生成対象期間を28個に区切った予測対象期間それぞれについて、衛星予測暦に含まれる予測位置を予測対象期間と同じ長さの28個の期間毎に時系列にグループ分けする。同様に、衛星精密暦に含まれる実績位置を28個の期間にグループ分けする。そして、衛星予測暦及び衛星精密暦の複数の組合せそれぞれについて、各期間毎に、予測位置と実績位置間の距離から衛星位置誤差を算出する。そして、衛星位置誤差が大きいほど予測軌道の信頼性が低くなるように、各予測対象期間における信頼性パラメータの値を決定する。
【0089】
GPS衛星SVの実績位置は、その時刻におけるGPS衛星SVの実際の位置である。そのため、GPS衛星SVの予測位置と実績位置間の距離が大きいほど、予測した衛星軌道の信頼性は低いことになる。従って、衛星予測暦と衛星精密暦とを対比することで、長期予測エフェメリスの信頼性を適確に判定し、適切な信頼性パラメータの値を携帯型電話機4に提供することが可能となる。
【0090】
2.第2実施形態
2−1.データ構成
第2実施形態は、ROM340に、長期予測エフェメリス提供プログラム341のサブルーチンとして、第2の長期予測エフェメリス生成プログラムが格納されており、データとして、第2の予測軌道信頼度決定用データ345が格納された実施形態である。CPU310は、長期予測エフェメリス提供処理において、第2の長期予測エフェメリス生成プログラムを読み出して実行することで、第2の長期予測エフェメリス生成処理を行う。
【0091】
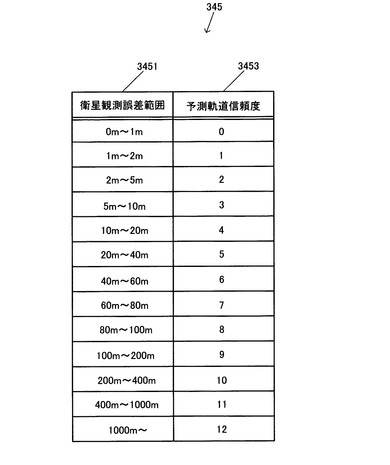
図15は、第2の予測軌道信頼度決定用データ345のデータ構成の一例を示す図である。第2の予測軌道信頼決定用データ345には、後述する衛星観測誤差が含まれる範囲である衛星観測誤差範囲3451と、衛星観測誤差が当該衛星観測誤差範囲3451に含まれる場合に設定する予測軌道信頼度3453とが対応付けて記憶されている。第1実施形態では、衛星位置誤差に基づいて予測軌道信頼度を決定したが、第2実施形態では、衛星観測誤差に基づいて予測軌道信頼度を決定する。
【0092】
2−2.処理の流れ
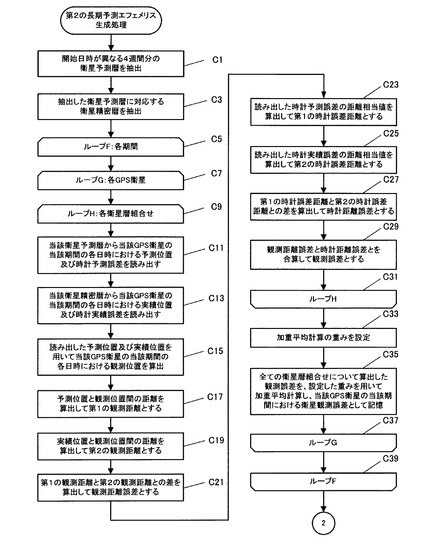
図16及び図17は、第2の長期予測エフェメリス生成処理の流れを示すフローチャートである。
先ず、CPU310は、衛星予測暦データベース351から、開始日時が異なる4週間分の衛星予測暦352を抽出する(ステップC1)。また、衛星精密暦データベース353から、ステップC1で抽出した衛星予測暦352に対応する衛星精密暦354を抽出する(ステップC3)。
【0093】
次いで、CPU310は、第1〜第28期間それぞれについて、ループFの処理を実行する(ステップC5〜C39)。ループFの処理では、CPU310は、各GPS衛星について、ループGの処理を行い(ステップC7〜C37)、ループGの処理では、各衛星暦組合せについて、ループHの処理を実行する(ステップC9〜C31)。
【0094】
ループHの処理では、CPU310は、当該衛星予測暦352から、当該GPS衛星の当該期間の各日時における予測位置及び予測時計誤差を読み出す(ステップC11)。また、当該衛星精密暦354から、当該GPS衛星の当該期間の各日時における実績位置及び時計実績誤差を読み出す(ステップC13)。
【0095】
そして、CPU310は、ステップC11及びC13で読み出した予測位置及び実績位置を用いて、当該GPS衛星の当該期間の各日時における観測位置を算出する(ステップC15)。観測位置は、予測位置を地球上に投影した位置と、実績位置を地球上に投影した位置との中間位置として算出する。より具体的には、予測位置と地球中心を結ぶ線分が地表面(標高0m)と交差する交点の座標と、実績位置と地球中心を結ぶ線分が地表面(標高0m)と交差する交点の座標を求める。そして、この2つの交点座標の中点の座標で表される位置を観測位置とする。いわゆる標高投影法を用いて観測位置を算出することになる。
【0096】
その後、CPU310は、各日時について、予測位置と観測位置間の距離を算出して、第1の観測距離とする(ステップC17)。また、各日時について、実績位置と観測位置間の距離を算出して、第2の観測距離とする(ステップC19)。そして、各日時について、第1の観測距離と第2の観測距離との差を算出して、観測距離誤差とする(ステップC21)。
【0097】
次に、CPU310は、各日時について、ステップC11で読み出した時計予測誤差の距離相当値を算出して、第1の時計誤差距離とする(ステップC23)。また、各日時について、ステップC13で読み出した時計実績誤差の距離相当値を算出して、第2の時計誤差距離とする(ステップC25)。距離相当値は、時計誤差に光速を乗算することで求めることができる。
【0098】
その後、CPU310は、各日時について、ステップC23で算出した第1の時計誤差距離と、ステップC25で算出した第2の時計誤差距離との差を算出して、時計距離誤差とする(ステップC27)。そして、CPU310は、各日時について、ステップC21で算出した観測距離誤差と、ステップC27で算出した時計距離誤差とを合算して、観測誤差とする(ステップC29)。そして、CPU310は、次の衛星暦組合せへと処理を移行する。
【0099】
通常、測位を行う際には、GPS衛星の時計誤差分の位置誤差を加味して、GPS衛星と測位装置間の正しい擬似距離を算出し、測位演算に利用する。そのため、本実施形態では、第1の観測距離と第2の観測距離の差として求められる観測距離誤差と、第1の時計誤差距離と第2の時計誤差距離の差として求められる時計距離誤差とを合算して観測誤差を求め、この観測誤差を用いて、予測軌道信頼度を決定することにしている。
【0100】
全ての衛星暦組合せについてステップC11〜C29の処理を行った後、CPU310は、ループHの処理を終了する(ステップC31)。その後、CPU310は、観測誤差を加重平均計算する際の重みを設定する(ステップC33)。具体的には、開始日時が古い衛星暦組合せに対応する観測誤差ほど、重みが小さくなるように設定する。
【0101】
そして、CPU310は、全ての衛星暦組合せについてステップC29で算出した観測誤差を、ステップC33で設定した重みを用いて加重平均計算し、当該GPS衛星の当該期間における衛星観測誤差として記憶する(ステップC35)。より具体的には、加重平均計算の重みを「k1〜kN」、観測誤差を「e1〜eN」とした場合、次式(2)及び(3)に従って衛星観測誤差「Eo」を算出する。
Eo=(k1/K)×e1+(k2/K)×e2+・・・+(kN/K)×eN
・・・(2)
K=k1+k2+・・・+kN ・・・(3)
但し、「N」は衛星暦組合せの数である。
【0102】
その後、CPU310は、次のGPS衛星へと処理を移行する。そして、全てのGPS衛星についてステップC9〜C35の処理を行った後、CPU310は、ループGの処理を終了する(ステップC37)。また、全ての期間についてステップC7〜C37の処理を行った後、CPU310は、ループFの処理を終了する(ステップC39)。
【0103】
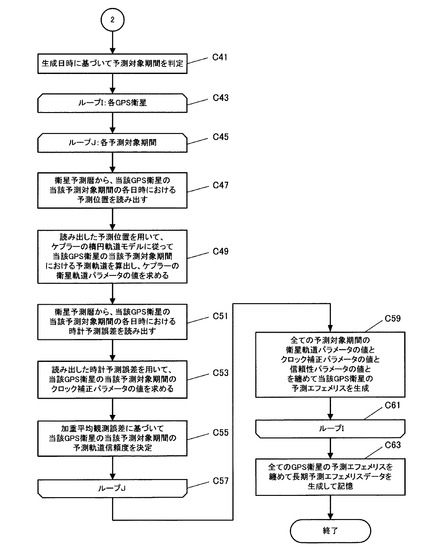
次いで、CPU310は、ステップC41〜C63の処理を行う。これらの処理は、
図14の長期予測エフェメリス生成処理のステップB25〜B47の処理と略同一である。異なるのは、ステップC55において、ステップC35で算出した衛星観測誤差に基づいて、当該GPS衛星の当該予測対象期間の予測軌道信頼度を決定する点である。
【0104】
具体的には、CPU310は、ROM340に記憶されている第2の予測軌道信頼度決定用データ345を参照し、ステップC35で算出した衛星観測誤差が含まれる衛星観測誤差範囲3451を判定する。そして、判定した衛星観測誤差範囲3451に対応する予測軌道信頼度3453を読み出して、当該GPS衛星の当該予測対象期間の予測軌道信頼度に決定する。
【0105】
2−3.作用効果
第2実施形態によれば、サーバシステム3は、衛星予測暦及び衛星精密暦の複数の組合せそれぞれについて、各期間毎に、観測位置から予測位置までの距離に当該予測位置におけるGPS衛星SVの時計予測誤差分の計測距離誤差を加味した第1の距離を算出する。また、観測位置から実績位置までの距離に、当該実績位置におけるGPS衛星SVの時計実績誤差分の計測距離誤差を加味した第2の距離を算出する。次いで、第1の距離と第2の距離との差(観測距離誤差)を算出する。そして、各期間毎に、観測距離誤差を加重平均計算して衛星観測誤差を算出し、算出した衛星観測誤差を用いて、各予測対象期間における予測軌道信頼度を決定する。
【0106】
長期予測エフェメリスの生成日時に開始日時が近い衛星暦組合せについて算出された観測距離誤差ほど、観測距離誤差を正確に再現したものである可能性が高い。そのため、開始日時が長期予測エフェメリスの生成日時に近いほど重みを高く設定し、逆に開始日時が古いほど重みを低く設定して、観測距離誤差を加重平均計算する。これにより、予測軌道の信頼性を適確に判定し、より適切な信頼性パラメータの値を携帯型電話機4に提供することが可能となる。
【0107】
3.変形例
3−1.測位システム
上述した実施形態では、サーバシステム3と携帯型電話機4を備えた測位システム1を例に挙げて説明したが、本発明を適用可能な測位システムはこれに限られるわけではない。例えば、携帯型電話機4の代わりに、測位装置を備えたノート型パソコンやPDA(Personal Digital Assistant)、カーナビゲーション装置等の電子機器に適用することも可能である。
【0108】
また、上述した実施形態では、情報提供装置の一種としてサーバシステム3を例に挙げて説明したが、情報提供装置はサーバシステム3に限られるわけではない。例えば、汎用のパソコン等であってもよい。
【0109】
3−2.衛星測位システム
また、上述した実施形態では、衛星測位システムとしてGPSを例に挙げて説明したが、WAAS(Wide Area Augmentation System)、QZSS(Quasi Zenith Satellite System)、GLONASS(GLObal NAvigation Satellite System)、GALILEO等の他の衛星測位システムであってもよい。
【0110】
3−3.衛星位置誤差
第1実施形態では、各期間それぞれについて、全ての衛星暦組合せについて算出した衛星位置間距離の平均値を算出して衛星位置誤差とするものとして説明したが、衛星位置誤差を次のように求めてもよい。すなわち、全ての衛星暦組合せについて算出した衛星位置間距離のうちの最大値を判定して衛星位置誤差とする。この場合、ある1つの期間について衛星位置間距離が極端に大きくなったような場合(衛星位置の誤差が極端に大きくなったような場合)を検出して、適切な予測軌道信頼度を設定することが可能となる。
【0111】
また、各期間それぞれについて、次式(4)に従って衛星位置誤差を算出することとしてもよい。
Ep=dAVE+R・(dMAX−dAVE) ・・・(4)
但し、「Ep」は衛星位置誤差、「dAVE」は衛星位置間距離の平均値、「dMAX」は衛星位置間距離の最大値、「R」は、衛星位置間距離が、当該期間における全てのGPS衛星の衛星位置間距離を平均した値の2倍以上となった率である。この場合は、極端に大きな衛星位置間距離が多数存在する期間ほど、衛星位置誤差が大きくなるため、予測軌道の信頼性は低く判定されることになる。
【0112】
さらには、衛星位置に時計誤差分の位置誤差を加味した位置を用いて衛星位置誤差を算出することとしてもよい。具体的には、各期間について、衛星予測暦に含まれる予測位置及び時計予測誤差を読み出し、予測位置に時計予測誤差分の位置誤差を加味した位置を第1の衛星位置として算出する。同様に、衛星精密暦に含まれる実績位置及び時計実績誤差を読み出し、実績位置に時計実績誤差の位置誤差を加味した位置を第2の衛星位置として算出する。そして、第1の衛星位置と第2の衛星位置間の距離を衛星位置間距離とし、この衛星位置間距離を期間毎に平均することで、衛星位置誤差を算出する。
【0113】
3−4.衛星観測誤差
第2実施形態では、各期間について算出された観測誤差を加重平均計算することで衛星観測誤差を算出するものとして説明したが、衛星観測誤差を次のように求めてもよい。すなわち、各期間について算出された観測誤差の標準偏差(σ)を求め、観測誤差の平均値から標準偏差だけ離れた信頼区間(1σ)に含まれる観測誤差の平均値又は最大値を求める。そして、求めた平均値又は最大値を、当該期間における衛星観測誤差とする。
【0114】
この場合、1σの信頼区間に含まれない大きな観測誤差は無視した上で、大部分の観測誤差が分布している範囲に含まれる観測誤差の大きさに基づいて衛星観測誤差を求めることになり、観測誤差の平均とばらつきとを考慮して、予測軌道の信頼性を適切に判定することが可能となる。
【0115】
3−5.長期予測エフェメリスの生成
上述した実施形態では、サーバシステム3が長期予測エフェメリスデータを生成して携帯型電話機4に提供するものとして説明したが、携帯型電話機4が自ら長期予測エフェメリスデータを生成することとしてもよい。すなわち、携帯型電話機4が外部システム2から定期的に衛星予測暦及び衛星精密暦を取得し、取得した衛星予測暦及び衛星精密暦を用いて長期予測エフェメリス生成処理を実行することで、長期予測エフェメリスデータを生成する。携帯型電話機4の代わりに、測位装置を備えたノート型パソコンやPDA、カーナビゲーション装置等の電子機器に適用する場合も同様である。
【0116】
また、上述した実施形態では、サーバシステム3が予め所定の時間間隔(例えば4時間に1回)で長期予測エフェメリスデータを生成しておき、携帯型電話機4から長期予測エフェメリスデータの要求を受けた場合に、生成しておいた長期予測エフェメリスデータを送信するものとして説明した。このような構成ではなく、サーバシステム3が、携帯型電話機4から長期予測エフェメリスデータの要求を受けたときに長期予測エフェメリスデータを生成して、携帯型電話機4に送信する構成としてもよい。
【0117】
3−6.生成対象期間
上述した実施形態では、長期予測エフェメリスの生成日時を基準として1週間後までの期間を生成対象期間として長期予測エフェメリスを生成するものとして説明したが、生成対象期間は1週間よりも長い期間(例えば2週間)としてもよいし、1週間よりも短い期間(例えば3日)としてもよい。GPS衛星SVから送信される航法データとしてのエフェメリスは有効期間が一般に4時間程度であるが、長期予測エフェメリスは少なくともGPS衛星SVから送信される航法データとしてのエフェメリスよりも有効期間が長ければよい。1日以上であれば好適である。
【0118】
3−7.予測対象期間
また、上述した実施形態では、予測対象期間の長さを6時間とするものとして説明したが、これに限定されるわけではなく、4時間や8時間等としてもよく、適宜設定可能であることは勿論である。
【0119】
3−8.衛星暦組合せの抽出
第1実施形態では、開始日時が異なる1週間分の衛星暦組合せ(衛星予測暦及び衛星精密暦)を抽出して衛星位置誤差を算出するものとして説明したが、抽出する衛星暦組合せは1週間分に限られるわけではなく、これよりも長い期間分(例えば2週間分)としてもよいし、これよりも短い期間分(例えば5日分)としてもよい。
【0120】
また、第2実施形態では、開始日時が異なる4週間分の衛星暦組合せを抽出して衛星観測誤差を算出するものとして説明したが、この場合も同様に、これよりも長い期間(例えば8週間分)の衛星暦組合せを抽出することにしてもよいし、これよりも短い期間分(例えば2週間分)の衛星暦組合せを抽出することにしてもよい。
【図面の簡単な説明】
【0121】
【図1】測位システムの概略構成を示す図。
【図2】予測軌道信頼度の決定方法の説明図。
【図3】サーバシステムの機能構成を示すブロック図。
【図4】サーバシステムのROMに格納されたデータの一例を示す図。
【図5】サーバシステムのハードディスクに格納されたデータの一例を示す図。
【図6】予測軌道信頼度決定用データのデータ構成の一例を示す図。
【図7】衛星予測暦データベースのデータ構成の一例を示す図。
【図8】衛星精密暦データベースのデータ構成の一例を示す図。
【図9】衛星位置誤差データベースのデータ構成の一例を示す図。
【図10】長期予測エフェメリスデータのデータ構成の一例を示す図。
【図11】予測エフェメリスのデータ構成の一例を示す図。
【図12】長期予測エフェメリス提供処理の流れを示すフローチャート。
【図13】長期予測エフェメリス生成処理の流れを示すフローチャート。
【図14】長期予測エフェメリス生成処理の流れを示すフローチャート。
【図15】第2の予測軌道信頼度決定用データのデータ構成の一例を示す図。
【図16】第2の長期予測エフェメリス生成処理の流れを示すフローチャート。
【図17】第2の長期予測エフェメリス生成処理の流れを示すフローチャート。
【符号の説明】
【0122】
1 測位システム 、 2 外部システム、 3 サーバシステム、
4 携帯型電話機、 310 CPU、 320 操作部、 330 通信部、
340 ROM、 350 ハードディスク、 360 RAM、 370 バス、
SV GPS衛星
【技術分野】
【0001】
本発明は、長期予測軌道データの信頼性判定方法、長期予測軌道データの提供方法及び情報提供装置に関する。
【背景技術】
【0002】
測位用信号を利用した測位システムとしては、GPS(Global Positioning System)が広く知られており、携帯型電話機やカーナビゲーション装置等に内蔵された測位装置に利用されている。GPSでは、複数のGPS衛星の位置や各GPS衛星から自機までの擬似距離等の情報に基づいて自機の位置を示す3次元の座標値と時計誤差とを求める測位演算を行う。
【0003】
GPSによる測位では、先ず、GPS衛星から発信されるGPS衛星信号に重畳されているアルマナックやエフェメリスといった航法データに基づいて、GPS衛星の位置、速度、移動方向等の衛星情報を算出する。アルマナックは衛星を捕捉する際の有力な手掛かりとはなるが、衛星情報の精度が悪いため測位演算に使用しないのが一般的である。一方、エフェメリスは、衛星情報の精度が良いため、衛星を捕捉する際の有力な手掛かりとなるだけでなく、測位演算にも使用することができる。従って、例えばエフェメリスを保持していない状態で測位を開始した場合には、エフェメリスをGPS衛星信号から取得しなければならず、初回測位時間(TTFF:Time To First Fix)が増大する。
【0004】
そこで、サーバクライアントシステムであって、1週間といった長期間分のエフェメリスである長期予測エフェメリス(長期予測軌道データ)をサーバが予測し、クライアントである測位装置に提供する技術が開発されており、例えば特許文献1や特許文献2に開示されている。
【特許文献1】米国特許出願公開第2002/0188403号明細書
【特許文献2】米国特許出願公開第2005/0212700号明細書
【発明の開示】
【発明が解決しようとする課題】
【0005】
長期予測エフェメリスの定義方法としては、通常のエフェメリスと同様のデータフォーマットで定義する方法が考えられる。すなわち、衛星軌道の近似モデルの1つであるケプラーの楕円軌道モデルを用いて衛星軌道を近似し、その時のモデル式のパラメータ(以下、「衛星軌道パラメータ」と称す。)の値によって、長期予測エフェメリスを定義する方法である。測位用衛星の将来の位置を所定時間おきに時系列に予測した予測位置でなる衛星予測暦(予測位置データ)は、所定の商用システムから提供されている。ケプラーの楕円軌道モデルによる近似計算は、この衛星予測暦を用いて行うことが可能である。
【0006】
しかし、衛星予測暦に含まれる測位用衛星の予測位置は、将来になるほど、測位用衛星の実際位置からずれる傾向がある。そのため、ケプラーの楕円軌道モデルによる近似計算を行って長期予測エフェメリスを生成する場合に、近似計算により求めた衛星軌道は、生成日時から将来のものであるほど、実際の衛星軌道からずれたものとなる可能性がある。従来は、長期予測エフェメリスを一旦生成した後は、生成した長期予測エフェメリスの信頼性(測位に使用するのに適しているか否か)を判定する手法が存在しなかったため、サーバから長期予測エフェメリスを取得した測位装置は、信頼性の低い長期予測エフェメリスを使用して測位を行う場合があり得た。
【0007】
本発明は、上述した課題に鑑みて為されたものであり、長期予測エフェメリスの信頼性を判定するための手法を提案することを目的としている。
【課題を解決するための手段】
【0008】
以上の課題を解決するための第1の発明は、測位用衛星の予測位置を時系列に含んだ予測位置データと前記予測位置に対応する前記測位用衛星の実績位置を時系列に含んだ実績位置データとを用いて、少なくとも1日以上の対象期間における衛星軌道を予測した長期予測軌道データの信頼性を判定することを含む長期予測軌道データの信頼性判定方法である。
【0009】
また、他の発明として、少なくとも1日以上の対象期間における衛星軌道を予測した長期予測軌道データを生成する生成部と、測位用衛星の予測位置を時系列に含んだ予測位置データと前記予測位置に対応する前記測位用衛星の実績位置を時系列に含んだ実績位置データとを用いて、前記長期予測軌道データの信頼性を判定する判定部と、前記長期予測軌道データと前記判定部による判定結果とを測位装置に提供する提供部と、を備えた情報提供装置を構成してもよい。
【0010】
この第1の発明等によれば、測位用衛星の予測位置を時系列に含んだ予測位置データと予測位置に対応する測位用衛星の実績位置を時系列に含んだ実績位置データとを用いて、少なくとも1日以上の対象期間における衛星軌道を予測した長期予測軌道データの信頼性を判定する。
【0011】
測位用衛星の実績位置は、測位用衛星の実際にいた位置である。そのため、測位用衛星の予測位置と実績位置との差が大きい場合は、予測位置の正確性が低く、この予測位置に基づいて予測した予測衛星軌道の信頼性は低いと言える。従って、予測位置データと実績位置データとを用いることで、長期予測軌道データの信頼性を適切に判定することが可能となる。
【0012】
また、第2の発明として、第1の発明の長期予測軌道データの信頼性判定方法であって、前記長期予測軌道データは、前記対象期間を区切ったN個の所定期間における衛星軌道を予測したデータでなり、前記判定することは、前記予測位置データに含まれる予測位置を前記所定期間と同じ長さの期間毎に時系列にグループ分けした場合の第M期間(M=1,2,・・・,N)の予測位置と当該予測位置に対応する前記実績位置とを用いて、前記長期予測軌道データの第M期間のデータの信頼性を判定することである長期予測軌道データの信頼性判定方法を構成してもよい。
【0013】
この第2の発明によれば、予測位置データに含まれる予測位置を所定期間と同じ長さの期間毎に時系列にグループ分けした場合の第M期間の予測位置と当該予測位置に対応する実績位置とを用いて、長期予測軌道データの第M期間のデータの信頼性を判定する。すなわち、予測位置が属する期間と、長期予測軌道データに含まれるデータの期間とを1対1に対応付けて、長期予測軌道データの信頼性を判定することになる。
【0014】
また、第3の発明として、第2の発明の長期予測軌道データの信頼性判定方法であって、前記予測位置データには、予測を行った日時が異なる複数の予測位置データがあり、前記判定することには、前記複数の予測位置データについて当該予測位置データに含まれる第M期間の予測位置と当該予測位置に対応する前記実績位置との差を算出して、第M期間における予測位置と実績位置との差を分析することと、前記分析結果を用いて、前記長期予測軌道データの第M期間のデータの信頼性を判定することと、が含まれる長期予測軌道データの信頼性判定方法を構成してもよい。
【0015】
この第3の発明によれば、複数の予測位置データについて当該予測位置データに含まれる第M期間の予測位置と当該予測位置に対応する実績位置との差を算出して、第M期間における予測位置と実績位置との差を分析する。そして、その分析結果を用いて、長期予測軌道データの第M期間のデータの信頼性を判定する。予測位置と実績位置との差が大きい期間に対応する期間は、長期予測軌道データの信頼性が低いと判断することができる。
【0016】
また、第4の発明として、第3の発明の長期予測軌道データの信頼性判定方法であって、前記予測位置と前記実績位置との差を、所与の観測位置から前記予測位置までの距離と前記観測位置から前記実績位置までの距離との差として算出することを更に含む長期予測軌道データの信頼性判定方法を構成してもよい。
【0017】
この第4の発明によれば、予測位置と実績位置との差を、所与の観測位置から予測位置までの距離と観測位置から実績位置までの距離との差として算出する。これにより、衛星位置の差を用いるのではなく、観測位置からの距離の差を用いて長期予測軌道データの信頼性を判定することができる。
【0018】
また、第5の発明として、第3の発明の長期予測軌道データの信頼性判定方法であって、前記予測位置と前記実績位置との差を、前記観測位置から前記予測位置までの距離に、当該予測位置における前記測位用衛星の時計予測誤差分の計測距離誤差を加味した距離と、前記観測位置から前記実績位置までの距離に、当該実績位置における前記測位用衛星の時計実績誤差分の計測距離誤差を加味した距離との差として算出することを更に含む長期予測軌道データの信頼性判定方法を構成してもよい。
【0019】
この第5の発明によれば、予測位置と実績位置との差を、観測位置から予測位置までの距離に、当該予測位置における測位用衛星の時計予測誤差分の計測距離誤差を加味した距離と、観測位置から実績位置までの距離に、当該実績位置における測位用衛星の時計実績誤差分の計測距離誤差を加味した距離との差として算出する。これにより、測位用衛星の時計誤差分を加味した観測距離の差を用いて長期予測軌道データの信頼性を判定することができる。
【0020】
また、第6の発明として、第4又は第5の発明の長期予測軌道データの信頼性判定方法であって、前記予測位置を地球上に投影した位置と前記実績位置を地球上に投影した位置との中間位置を前記観測位置として算出することを更に含む長期予測軌道データの信頼性判定方法を構成してもよい。
【0021】
この第6の発明によれば、予測位置を地球上に投影した位置と実績位置を地球上に投影した位置との中間位置を観測位置として算出する。測位用衛星は地球を周回しており、ある位置に対する測位用衛星の仰角は変化するため、観測位置を固定とするのは適切ではない。そのため、いわゆる標高投影法に基づいて、観測位置を決定することにしたものである。
【0022】
また、第7の発明として、長期予測軌道データを生成することと、第1〜第6の何れかの発明の長期予測軌道データの信頼性判定方法を用いて、前記生成した長期予測軌道データの信頼性を判定することと、前記生成した長期予測軌道データと前記判定した判定結果とを測位装置に提供することと、を含む長期予測軌道データの提供方法を構成してもよい。
【0023】
この第7の発明によれば、長期予測軌道データを生成する。そして、上述した長期予測軌道データの信頼性判定方法を用いて、生成した長期予測軌道データの信頼性を判定し、生成した長期予測軌道データと判定した判定結果とを測位装置に提供する。これにより、測位装置は、提供された長期予測軌道データの信頼性を参照し、信頼性の低いデータを測位に利用しないようにすることができる。
【発明を実施するための最良の形態】
【0024】
以下、図面を参照して、本発明に好適な実施形態の一例を説明する。但し、本発明を適用可能な実施形態がこれに限定されるわけではない。
【0025】
図1は、各実施形態に共通する測位システム1の概略構成を示す図である。測位システム1は、外部システム2と、情報提供装置の一種であるサーバシステム3と、測位装置を備えた電子機器の一種である携帯型電話機4と、測位用衛星の一種である複数のGPS衛星SV(SV1,SV2,SV3,SV4,・・・)とを備えて構成される。尚、携帯型電話機4が必要なデータをサーバシステム3から取得した後は、携帯型電話機4とGPS衛星SVとで測位が可能であるため、携帯型電話機4とGPS衛星SVとで1つの測位システムが構成されるということもできる。また、地上側のシステムとして、サーバシステム3と携帯型電話機4とで測位システムと呼ぶこともできる。
【0026】
外部システム2は、GPS衛星SVから定期的に衛星信号を受信し、当該衛星信号に含まれる航法データ等に基づいて衛星予測暦を生成してサーバシステム3に提供する公知のシステムである。外部システム2が提供する衛星予測暦は、各GPS衛星SVそれぞれについて、将来の位置を予測した予測位置及びGPS衛星SVに搭載された原子時計の誤差を予測した時計予測誤差を所定時間おき(例えば15分おき)に時系列に並べた位置のデータである。
【0027】
また、外部システム2は、将来のデータとしての衛星予測暦を提供する他に、過去の事実のデータも提供する。すなわち、外部システム2は、GPS衛星SVの実際の位置である実績位置及びGPS衛星SVに搭載された原子時計の実際の誤差である時計実績誤差を含む衛星精密暦を過去の事実のデータとして生成して、サーバシステム3に提供する。実績位置及び時計実績誤差の算出方法については公知であるため、詳細な説明を省略する。外部システム2は、例えば衛星予測暦や衛星精密暦の提供を業務とする民間や公営の団体のコンピュータシステムに相当する。
【0028】
サーバシステム3は、衛星予測暦及び衛星精密暦を外部システム2から取得し、当該衛星予測暦及び衛星精密暦を用いて、全てのGPS衛星SVの予測されるエフェメリスであって、少なくとも1日分以上の例えば1週間といった長期間有効なエフェメリス(以下、本実施形態において「長期予測エフェメリス」と称す。長期間有効な軌道でもあるため、長期予測軌道データとも言える。)を生成・提供するサーバを備えたシステムである。
【0029】
携帯型電話機4は、ユーザが通話やメールの送受信等を行うための電子機器であり、通話やメールの送受信といった携帯型電話機としての本来の機能の他、位置を計測する機能(測位機能)をなす測位装置を具備している。携帯型電話機4は、ユーザ操作に従って、サーバシステム3に対して長期予測エフェメリスの要求信号を送信し、サーバシステム3から長期予測エフェメリスを受信する。そして、受信した長期予測エフェメリスを用いてGPS衛星SVを捕捉し、衛星信号に基づく測位演算を実行する。
【0030】
1.第1実施形態
1−1.原理
サーバシステム3は、外部システム2から取得した衛星予測暦を用いて、長期予測エフェメリスを生成する処理を行う。具体的には、長期予測エフェメリスの生成日時を基準として1週間後までの期間を生成対象期間とし、当該生成対象期間を衛星軌道の近似・モデル化を行う複数の期間(以下、「予測対象期間」と称す。)に区切る。本実施形態では、予測対象期間の長さを一律に6時間とする。すなわち、1週間の生成対象期間を6時間毎に28個の予測対象期間(第1予測対象期間〜第28予測対象期間)に区切る。
【0031】
そして、サーバシステム3は、外部システム2から取得した衛星予測暦に含まれる予測位置のうち、各予測対象期間に対応する期間の予測位置を抽出する。そして、抽出した全ての予測位置からの距離の二乗和が最小となるようなケプラーの衛星軌道モデル式(以下、「近似モデル」ともいう。)を各予測対象期間それぞれについて求める。このとき求めた衛星軌道の近似モデル式のパラメータを「衛星軌道パラメータ」と称し、近似モデルを算出する計算を「近似計算」ともいう。また、近似計算により求めた予測された衛星軌道のことを「予測軌道」と称する。長期予測エフェメリスは、全てのGPS衛星の全ての予測対象期間の衛星軌道パラメータの値が格納されたデータである。
【0032】
衛星予測暦に含まれるGPS衛星SVの予測位置は、将来になるほど、GPS衛星SVの実際の位置からずれる傾向がある。そのため、近似計算を行って長期予測エフェメリスを生成した場合に、近似計算により求めた予測軌道は、生成日時から将来のものであるほど、実際の衛星軌道からずれたものとなる可能性がある。
【0033】
本実施形態では、サーバシステム3は、各GPS衛星の各予測対象期間について、予測軌道の信頼性を示す指標値である「予測軌道信頼度」を決定し、決定した予測軌道信頼度を信頼性パラメータとして長期予測エフェメリスに含めて携帯型電話機4に提供する。本実施形態では、予測軌道信頼度は「0」〜「12」の13段階で表され、「0」が予測軌道の信頼性が最も高く、「12」が予測軌道の信頼性が最も低いことを示している。尚、予測軌道信頼度の数値範囲は適宜設定変更可能であり、例えば「0」〜「15」の16段階で表すこととしてもよい。予測軌道信頼度は、エフェメリスに含まれている「URA index」に相当する値である。
【0034】
図2は、予測軌道信頼度の具体的な決定方法を説明するための図である。分かり易くするため、長期予測エフェメリスのうち、第1予測対象期間のデータを生成する流れを中心に記載してある。本実施形態では、開始日時の異なる複数の衛星予測暦と、それらの衛星予測暦に対応する衛星精密暦(開始日時が同じ衛星精密暦)との組合せ(以下、「衛星暦組合せ」と称す。)を用いて、長期予測エフェメリスに含める予測軌道信頼度を決定する。開始日時とは、衛星予測暦及び衛星精密暦にそれぞれ含まれる衛星位置のうち最も古い衛星位置の日時である。
【0035】
本実施形態では、開始日時が4時間ずつずれた衛星予測暦と、それらに対応する衛星精密暦を用いて予測軌道信頼度を決定する。また、衛星予測暦及び衛星精密暦には、それぞれ1週間分の衛星位置及び時計誤差のデータが含まれており、便宜的に、この1週間を6時間毎にグループ分けした28個の期間を「第1期間〜第28期間」と表現する。但し、実際には、衛星予測暦及び衛星精密暦のデータは、衛星位置及び時計誤差が羅列的に配列されたデータ構造となっており、期間毎にグループ分けされているわけではない。
【0036】
予測軌道信頼度は、例えば、開始日時が異なる1週間分の衛星暦組合せを用いて決定することができる。具体的には、現在日時から見て、8日と0時間前を開始日時とする衛星暦組合せ、7日と20時間前を開始日時とする衛星暦組合せ、7日と16時間前を開始日時とする衛星暦組合せ、・・・、1日と0時間前を開始日時とする衛星暦組合せといった具合に、開始日時が4時間毎に異なる1週間分の衛星暦組合せを抽出する。
【0037】
そして、各衛星暦組合せそれぞれについて、当該衛星予測暦に含まれる各日時(衛星予測暦に含まれる15分おきの日時)における予測位置と、当該衛星精密暦に含まれる各日時(衛星精密暦に含まれる15分おきの日時)における実績位置間の距離(以下、「衛星位置間距離」と称す。)を、第1期間〜第28期間それぞれについて算出する。すなわち、第1期間は第1期間同士、第2期間は第2期間同士、各日時における衛星位置間距離を算出する。
【0038】
そして、全ての衛星暦組合せについて算出した衛星位置間距離を用いて、「衛星位置誤差」を算出する。衛星位置誤差は、例えば、全ての衛星暦組合せについて算出した衛星位置間距離の平均値とすることができる。予測軌道信頼度は、衛星位置誤差の大きさに基づいて決定する。衛星位置誤差が大きいほど、予測軌道の信頼性は低い。従って、予測軌道信頼度は、衛星位置誤差が大きいほど大きな値(予測軌道信頼度は値が大きいほど信頼性が低いことを意味する。)となるように決定する。
【0039】
最後に、衛星暦組合せの第1期間〜第28期間を、長期予測エフェメリスの第1予測対象期間〜第28予測対象期間にそれぞれ対応させる。そして、各期間について決定された予測軌道信頼度を対応する予測対象期間における予測軌道信頼度として、長期予測エフェメリスに格納する。
【0040】
1−2.機能構成
図3は、サーバシステム3の機能構成を示すブロック図である。サーバシステム3は、CPU(Central Processing Unit)310と、操作部320と、通信部330と、ROM(Read Only Memory)340と、ハードディスク350と、RAM(Random Access Memory)360とを備え、各部がバス370で接続されたコンピュータシステムである。
【0041】
CPU310は、ROM340に記憶されているシステムプログラム等に従ってサーバシステム3の各部を統括的に制御するプロセッサである。本実施形態では、CPU310は、ROM340に記憶されている長期予測エフェメリス提供プログラム341に従って、携帯型電話機4に長期予測エフェメリスを提供する処理を行う。
【0042】
操作部320は、サーバシステム3の管理者による操作指示を受け付け、操作に応じた信号をCPU310に出力する入力装置である。この機能は、例えばキーボードやボタン、マウス等により実現される。
【0043】
通信部330は、システム内部で利用される各種データをインターネット等の通信ネットワークを介して外部システム2や携帯型電話機4とやり取りするための通信装置である。
【0044】
ROM340は、読み取り専用の不揮発性の記憶装置であり、CPU310がサーバシステム3を制御するためのシステムプログラムや、長期予測エフェメリスを携帯型電話機4に提供するためのプログラム、長期予測エフェメリスを生成するためのプログラム等の各種プログラムや各種データ等を記憶している。
【0045】
ハードディスク350は、磁気ヘッド等を用いてデータの読み書きを行う記憶装置であり、ROM340と同様、サーバシステム3が備える各種機能を実現するためのプログラムやデータ等を記憶している。
【0046】
RAM360は、読み書き可能な揮発性の記憶装置であり、CPU310により実行されるシステムプログラム、長期予測エフェメリス提供プログラム、各種処理プログラム、各種処理の処理中データ、処理結果などを一時的に記憶するワークエリアを形成している。
【0047】
1−3.データ構成
図4は、ROM340に格納されたデータの一例を示す図である。ROM340には、CPU310により読み出され、長期予測エフェメリス提供処理(図12参照)として実行される長期予測エフェメリス提供プログラム341と、予測軌道信頼度決定用データ343とが記憶されている。また、長期予測エフェメリス提供プログラム341には、長期予測エフェメリス生成処理(図13及び図14参照)として実行される長期予測エフェメリス生成プログラム3411がサブルーチンとして含まれている。
【0048】
長期予測エフェメリス提供処理とは、CPU310が、長期予測エフェメリスデータ357を生成する処理を定期的に行い、携帯型電話機4から長期予測エフェメリスデータ357の要求信号を受信した場合に、生成しておいた長期予測エフェメリスデータ357を要求元の携帯型電話機4に送信する処理である。長期予測エフェメリス提供処理については、フローチャートを用いて詳細に後述する。
【0049】
長期予測エフェメリス生成処理とは、CPU310が、長期予測エフェメリスデータ357を生成する処理である。本実施形態では、CPU310は、長期予測エフェメリスデータ357を4時間に1回生成する。長期予測エフェメリス生成処理についても、フローチャートを用いて詳細に後述する。
【0050】
図6は、予測軌道信頼度決定用データ343のデータ構成の一例を示す図である。予測軌道信頼度決定用データ343には、衛星位置誤差が含まれる範囲である衛星位置誤差範囲3431と、衛星位置誤差が当該衛星位置誤差範囲3431に含まれる場合に設定する予測軌道信頼度3433とが対応付けて記憶されている。
【0051】
衛星予測暦及び衛星精密暦でなる衛星暦組合せそれぞれについて、各予測位置と、その予測位置の日時に対応する日時における実績位置との間の距離(衛星位置間距離)を求める。そして、求めた衛星位置間距離の平均値が衛星位置誤差となる。衛星位置誤差は、衛星暦組合せ毎に求める。
【0052】
予測軌道信頼度3433は、原理で説明したように、予測軌道の信頼性を示す指標値の一種であり、例えば「0」〜「12」の13段階で表され、「0」が予測軌道の信頼性が最も高く、「12」が予測軌道の信頼性が最も低いことを意味している。例えば、衛星位置誤差3431が「20m〜40m」の範囲に含まれる場合は、予測軌道信頼度3433として「5」が設定される。
【0053】
図5は、ハードディスク350に格納されたデータの一例を示す図である。ハードディスク350には、衛星予測暦データベース351と、衛星精密暦データベース353と、衛星位置誤差データベース355と、長期予測エフェメリスデータ357とが記憶されている。
【0054】
図7は、衛星予測暦データベース351のデータ構成の一例を示す図である。衛星予測暦データベース351は、複数の衛星予測暦352(352−1,352−2,352−3,・・・)が時系列に記憶されている。衛星予測暦352は、各GPS衛星SVの1週間後までの予測位置及び時計予測誤差が15分おきに記憶された離散的なデータであり、開始日時毎に纏められたデータである。便宜的に、1週間の期間を6時間毎にグループ分けすることで、第1期間〜第28期間の28個の期間が構成される。
【0055】
例えば、衛星予測暦352−1は、予測の開始日時が「2008年8月1日0時00分」のデータである。そして、「2008年8月1日5時45分」におけるGPS衛星「SV2」の予測位置は「(Xp32,Yp32,Zp32)」であり、原子時計の予測誤差は「Δtp32」である。
【0056】
CPU310は、外部システム2から定期的に(例えば4時間に1回)衛星予測暦を受信する。そして、受信した衛星予測暦を衛星予測暦データベース351に蓄積・記憶するためにデータフォーマットの加工処理等を行う。具体的には、開始日時が異なり、長期予測エフェメリスの生成対象期間(例えば1週間)と同じ期間分のデータが格納された複数の衛星予測暦352を生成して、衛星予測暦データベース351に蓄積・記憶させる。
【0057】
図8は、衛星精密暦データベース353のデータ構成の一例を示す図である。衛星精密暦データベース353には、複数の衛星精密暦354(354−1,354−2,354−3,・・・)が時系列に記憶されている。衛星精密暦354は、各GPS衛星SVの1週間分の実績位置及び時計実績誤差が15分おきに記憶された離散的なデータであり、開始日時毎に纏められたデータである。1週間の期間を6時間毎にグループ分けすることで、第1期間〜第28期間の28個の期間が構成される。
【0058】
例えば、衛星精密暦354−1は、計測の開始日時が「2008年8月1日0時00分」のデータである。そして、「2008年8月1日5時45分」におけるGPS衛星「SV2」の実績位置は「(Xm32,Ym32,Zm32)」であり、原子時計の実際誤差は「Δtm32」であった。
【0059】
CPU310は、外部システム2から定期的に(例えば4時間に1回)衛星精密暦を受信する。そして、受信した衛星精密暦を衛星精密暦データベース353に蓄積・記憶するためにデータフォーマットの加工処理等を行う。具体的には、衛星予測暦データベース351に格納されている複数の衛星予測暦352と開始日時が対応する衛星精密暦354を生成して、衛星精密暦データベース353に蓄積・記憶させる。
【0060】
図9は、衛星位置誤差データベース355のデータ構成の一例を示す図である。衛星位置誤差データベース355は、複数の衛星位置誤差データ356(356−1,356−2,356−3,・・・)が期間別に記憶されたデータである。各衛星位置誤差データ356には、当該期間の番号と、当該期間における各GPS衛星(SV1〜SV32)の衛星位置誤差とが対応付けて記憶されている。
【0061】
例えば、衛星位置誤差データ356−1は、第1期間のデータである。また、第1期間におけるGPS衛星「SV2」の衛星位置誤差は「24m」である。CPU310は、長期予測エフェメリス生成処理において、衛星予測暦352に含まれる予測位置と、当該衛星予測暦352に対応する期間の衛星精密暦354に含まれる実績位置とを用いて、各期間における各GPS衛星SVの衛星位置誤差を算出する。そして、算出した衛星位置誤差を格納した衛星位置誤差データ356を生成して、衛星位置誤差データベース355に蓄積・記憶させる。
【0062】
図10は、長期予測エフェメリスデータ357のデータ構成の一例を示す図である。長期予測エフェメリスデータ357には、長期予測エフェメリスデータの生成日時3571と、GPS衛星SV1〜SV32の予測エフェメリス3573(3573−1〜3573−32)とが対応付けて記憶されている。
【0063】
図11は、予測エフェメリス3573のデータ構成の一例を示す図である。予測エフェメリス3573(3573−1,3573−2,・・・,3573−32)には、各予測対象期間それぞれについて、軌道長半径や離心率、軌道傾斜角といったケプラーの衛星軌道パラメータの値と、衛星時計の基準時刻、衛星時計のオフセット、衛星時計のドリフト及び衛星時計周波数のドリフトでなるクロック補正パラメータの値と、信頼性パラメータである予測軌道信頼度とが記憶されている。
【0064】
CPU310は、長期予測エフェメリス生成処理において、各GPS衛星SVについて、予測対象期間毎に衛星軌道パラメータ、クロック補正パラメータ及び信頼性パラメータの値を算出して予測エフェメリス3573を生成する。そして、全てのGPS衛星SVについて生成した予測エフェメリス3573を纏めて、生成日時3571と対応付けて長期予測エフェメリスデータ357を生成して、ハードディスク350に記憶させる。
【0065】
1−4.処理の流れ
図12は、ROM340に記憶されている長期予測エフェメリス提供プログラム341がCPU310により読み出されて実行されることで、サーバシステム3において実行される長期予測エフェメリス提供処理の流れを示すフローチャートである。
【0066】
先ず、CPU310は、外部システム2から衛星予測暦及び衛星精密暦を受信したか否かを判定し(ステップA1)、受信しなかったと判定した場合は(ステップA1;No)、ステップA5へと処理を移行する。
【0067】
また、受信したと判定した場合は(ステップA1;Yes)、CPU310は、受信した衛星予測暦及び衛星精密暦に加工処理を施し、開始日時及び期間が同一である複数の衛星予測暦352及び衛星精密暦354を生成する(ステップA2)。そして、生成した衛星予測暦352及び衛星精密暦354を、ハードディスク350の衛星予測暦データベース351及び衛星精密暦データベース353にそれぞれ蓄積記憶させる(ステップA3)。
【0068】
次いで、CPU310は、長期予測エフェメリスの生成日時であるか否かを判定する(ステップA5)。本実施形態では、4時間に1回長期予測エフェメリスを生成するものとする。そして、まだ生成日時ではないと判定した場合は(ステップA5;No)、CPU310は、ステップA9へと処理を移行する。
【0069】
また、長期予測エフェメリスの生成日時であると判定した場合は(ステップA5;Yes)、CPU310は、ROM340に記憶されている長期予測エフェメリス生成プログラム3411を読み出して実行することで、長期予測エフェメリス生成処理を行う(ステップA7)。
【0070】
図13及び図14は、長期予測エフェメリス生成処理の流れを示すフローチャートである。
先ず、CPU310は、ハードディスク350の衛星予測暦データベース351から、開始日時が異なる1週間分の衛星予測暦352を抽出する(ステップB1)。また、抽出した衛星予測暦352に対応する衛星精密暦354を抽出する(ステップB3)。
【0071】
次いで、CPU310は、第1〜第28期間それぞれについて、ループAの処理を実行する(ステップB5〜B23)。ループAの処理では、CPU310は、各GPS衛星SVについて、ループBの処理を行い(ステップB7〜B21)、ループBの処理では、各衛星暦組合せについて、ループCの処理を実行する(ステップB9〜B17)。
【0072】
ループCの処理では、CPU310は、当該衛星予測暦352から、当該期間の当該GPS衛星の各日時における予測位置を読み出す(ステップB11)。また、CPU310は、当該衛星精密暦354から、当該期間の当該GPS衛星の各日時における実績位置を読み出す(ステップB13)。
【0073】
次いで、CPU310は、各日時について、ステップB11で読み出した予測位置と、ステップB13で読み出した実績位置間の距離(衛星位置間距離)を算出する(ステップB15)。そして、CPU310は、次の衛星暦組合せへと処理を移行する。
【0074】
全ての衛星暦組合せについてステップB11〜B15の処理を行った後、CPU310は、ループCの処理を終了する(ステップB17)。その後、CPU310は、全ての衛星暦組合せについてステップB15で算出した衛星位置間距離の平均値を算出し、当該GPS衛星の当該期間における衛星位置誤差とし、衛星位置誤差データベース355に衛星位置誤差データ356として記憶させる(ステップB19)。そして、CPU310は、次のGPS衛星へと処理を移行する。
【0075】
全てのGPS衛星についてステップB9〜B19の処理を行った後、CPU310は、ループBの処理を終了する(ステップB21)。また、CPU310は、全ての期間についてステップB7〜B21の処理を行った後、ループAの処理を終了する(ステップB23)。
【0076】
その後、CPU310は、長期予測エフェメリスの今回の生成日時(現在日時)に基づいて各予測対象期間を判定する(ステップB25)。すなわち、今回の生成日時から1週間後までの期間を生成対象期間とし、当該生成対象期間を6時間毎に区切った各期間を予測対象期間と判定する。
【0077】
次いで、CPU310は、各GPS衛星SVそれぞれについて、ループDの処理を実行する(ステップB27〜B45)。ループDの処理では、CPU310は、ステップB25で判定した各予測対象期間それぞれについて、ループEの処理を実行する(ステップB29〜B41)。
【0078】
ループEの処理では、CPU310は、ハードディスク350の衛星予測暦データベース351に記憶されている最新の衛星予測暦352から、当該GPS衛星SVの当該予測対象期間の各日時における予測位置を読み出す(ステップB31)。そして、CPU310は、読み出した予測位置を用いて、ケプラーの楕円軌道モデルに従って当該GPS衛星SVの当該予測対象期間における予測軌道を算出し、ケプラーの衛星軌道パラメータの値を求める(ステップB33)。尚、予測軌道の具体的な算出方法については公知であるため、詳細な説明を省略する。
【0079】
その後、CPU310は、最新の衛星予測暦352から、当該GPS衛星SVの当該予測対象期間の各日時における時計予測誤差を読み出す(ステップB35)。そして、CPU310は、読み出した時計予測誤差を用いて、当該GPS衛星の当該予測対象期間のクロック補正パラメータの値を求める(ステップB37)。
【0080】
時刻「t」における時計予測誤差「Δt」は、クロック補正パラメータである衛星時計の基準時刻「tc」、衛星時計のオフセット「a0」、衛星時計のドリフト「a1」及び衛星時計周波数のドリフト「a2」を用いて、次式(1)によって近似することができる。
Δt=a0+a1(t−tc)+a2(t−tc)2 ・・・(1)
【0081】
式(1)は、時計予測誤差の経時変化を近似するための時計誤差モデル式である。衛星予測暦352に含まれる各日時の時計予測誤差「Δt」をサンプリングデータとして、例えば最小二乗法を用いた近似計算を行うことで、クロック補正パラメータの値を算出することができる。
【0082】
次に、CPU310は、衛星位置誤差データベース355の衛星位置誤差データ356に記憶されている衛星位置誤差に基づいて、当該GPS衛星の当該予測対象期間の予測軌道信頼度を決定する(ステップB39)。具体的には、ROM340に記憶されている予測軌道信頼度決定用データ343を参照し、衛星位置誤差が含まれる衛星位置誤差範囲3431を判定する。そして、判定した衛星位置誤差範囲3431に対応する予測軌道信頼度3433を、当該GPS衛星の当該予測対象期間の予測軌道信頼度に決定する。その後、CPU310は、次の予測対象期間へと処理を移行する。
【0083】
全ての予測対象期間についてステップB31〜B39の処理を行った後、CPU310は、ループEの処理を終了する(ステップB41)。その後、CPU310は、全ての予測対象期間についてステップB33で求めた衛星軌道パラメータの値と、ステップB37で求めたクロック補正パラメータの値と、ステップB39で決定した信頼性パラメータの値である予測軌道信頼度とを纏めて当該GPS衛星SVの予測エフェメリス3573を生成する(ステップB43)。そして、CPU310は、次のGPS衛星SVへと処理を移行する。
【0084】
全てのGPS衛星SVについてステップB29〜B43の処理を行った後、CPU310は、ループDの処理を終了する(ステップB45)。その後、CPU310は、全てのGPS衛星SVについてステップB43で生成した予測エフェメリス3573を纏めて、生成日時3571と対応付けて長期予測エフェメリスデータ357を生成し、ハードディスク350に記憶させる(ステップB47)。そして、CPU310は、長期予測エフェメリス生成処理を終了する。
【0085】
図12の長期予測エフェメリス提供処理に戻って、長期予測エフェメリス生成処理を行った後、CPU310は、携帯型電話機4から長期予測エフェメリスデータ357の要求信号を受信したか否かを判定する(ステップA9)。そして、受信しなかったと判定した場合は(ステップA9;No)、ステップA1に戻る。
【0086】
また、要求信号を受信したと判定した場合は(ステップA9;Yes)、CPU310は、ハードディスク350に記憶されている長期予測エフェメリスデータ357を要求元の携帯型電話機4に送信する(ステップA11)。そして、CPU310は、ステップA1に戻る。
【0087】
1−5.作用効果
第1実施形態によれば、測位システム1において、サーバシステム3は、外部システム2から受信したGPS衛星SVの予測位置のデータである衛星予測暦と、予測位置に対応するGPS衛星SVの実績位置のデータである衛星精密暦とを用いて、少なくとも1日以上の生成対象期間における衛星軌道を予測した長期予測エフェメリスの信頼性を判定する。そして、信頼性の判定結果を長期予測エフェメリスに含めて、携帯型電話機4に提供する。
【0088】
具体的には、長期予測エフェメリスの生成対象期間を28個に区切った予測対象期間それぞれについて、衛星予測暦に含まれる予測位置を予測対象期間と同じ長さの28個の期間毎に時系列にグループ分けする。同様に、衛星精密暦に含まれる実績位置を28個の期間にグループ分けする。そして、衛星予測暦及び衛星精密暦の複数の組合せそれぞれについて、各期間毎に、予測位置と実績位置間の距離から衛星位置誤差を算出する。そして、衛星位置誤差が大きいほど予測軌道の信頼性が低くなるように、各予測対象期間における信頼性パラメータの値を決定する。
【0089】
GPS衛星SVの実績位置は、その時刻におけるGPS衛星SVの実際の位置である。そのため、GPS衛星SVの予測位置と実績位置間の距離が大きいほど、予測した衛星軌道の信頼性は低いことになる。従って、衛星予測暦と衛星精密暦とを対比することで、長期予測エフェメリスの信頼性を適確に判定し、適切な信頼性パラメータの値を携帯型電話機4に提供することが可能となる。
【0090】
2.第2実施形態
2−1.データ構成
第2実施形態は、ROM340に、長期予測エフェメリス提供プログラム341のサブルーチンとして、第2の長期予測エフェメリス生成プログラムが格納されており、データとして、第2の予測軌道信頼度決定用データ345が格納された実施形態である。CPU310は、長期予測エフェメリス提供処理において、第2の長期予測エフェメリス生成プログラムを読み出して実行することで、第2の長期予測エフェメリス生成処理を行う。
【0091】
図15は、第2の予測軌道信頼度決定用データ345のデータ構成の一例を示す図である。第2の予測軌道信頼決定用データ345には、後述する衛星観測誤差が含まれる範囲である衛星観測誤差範囲3451と、衛星観測誤差が当該衛星観測誤差範囲3451に含まれる場合に設定する予測軌道信頼度3453とが対応付けて記憶されている。第1実施形態では、衛星位置誤差に基づいて予測軌道信頼度を決定したが、第2実施形態では、衛星観測誤差に基づいて予測軌道信頼度を決定する。
【0092】
2−2.処理の流れ
図16及び図17は、第2の長期予測エフェメリス生成処理の流れを示すフローチャートである。
先ず、CPU310は、衛星予測暦データベース351から、開始日時が異なる4週間分の衛星予測暦352を抽出する(ステップC1)。また、衛星精密暦データベース353から、ステップC1で抽出した衛星予測暦352に対応する衛星精密暦354を抽出する(ステップC3)。
【0093】
次いで、CPU310は、第1〜第28期間それぞれについて、ループFの処理を実行する(ステップC5〜C39)。ループFの処理では、CPU310は、各GPS衛星について、ループGの処理を行い(ステップC7〜C37)、ループGの処理では、各衛星暦組合せについて、ループHの処理を実行する(ステップC9〜C31)。
【0094】
ループHの処理では、CPU310は、当該衛星予測暦352から、当該GPS衛星の当該期間の各日時における予測位置及び予測時計誤差を読み出す(ステップC11)。また、当該衛星精密暦354から、当該GPS衛星の当該期間の各日時における実績位置及び時計実績誤差を読み出す(ステップC13)。
【0095】
そして、CPU310は、ステップC11及びC13で読み出した予測位置及び実績位置を用いて、当該GPS衛星の当該期間の各日時における観測位置を算出する(ステップC15)。観測位置は、予測位置を地球上に投影した位置と、実績位置を地球上に投影した位置との中間位置として算出する。より具体的には、予測位置と地球中心を結ぶ線分が地表面(標高0m)と交差する交点の座標と、実績位置と地球中心を結ぶ線分が地表面(標高0m)と交差する交点の座標を求める。そして、この2つの交点座標の中点の座標で表される位置を観測位置とする。いわゆる標高投影法を用いて観測位置を算出することになる。
【0096】
その後、CPU310は、各日時について、予測位置と観測位置間の距離を算出して、第1の観測距離とする(ステップC17)。また、各日時について、実績位置と観測位置間の距離を算出して、第2の観測距離とする(ステップC19)。そして、各日時について、第1の観測距離と第2の観測距離との差を算出して、観測距離誤差とする(ステップC21)。
【0097】
次に、CPU310は、各日時について、ステップC11で読み出した時計予測誤差の距離相当値を算出して、第1の時計誤差距離とする(ステップC23)。また、各日時について、ステップC13で読み出した時計実績誤差の距離相当値を算出して、第2の時計誤差距離とする(ステップC25)。距離相当値は、時計誤差に光速を乗算することで求めることができる。
【0098】
その後、CPU310は、各日時について、ステップC23で算出した第1の時計誤差距離と、ステップC25で算出した第2の時計誤差距離との差を算出して、時計距離誤差とする(ステップC27)。そして、CPU310は、各日時について、ステップC21で算出した観測距離誤差と、ステップC27で算出した時計距離誤差とを合算して、観測誤差とする(ステップC29)。そして、CPU310は、次の衛星暦組合せへと処理を移行する。
【0099】
通常、測位を行う際には、GPS衛星の時計誤差分の位置誤差を加味して、GPS衛星と測位装置間の正しい擬似距離を算出し、測位演算に利用する。そのため、本実施形態では、第1の観測距離と第2の観測距離の差として求められる観測距離誤差と、第1の時計誤差距離と第2の時計誤差距離の差として求められる時計距離誤差とを合算して観測誤差を求め、この観測誤差を用いて、予測軌道信頼度を決定することにしている。
【0100】
全ての衛星暦組合せについてステップC11〜C29の処理を行った後、CPU310は、ループHの処理を終了する(ステップC31)。その後、CPU310は、観測誤差を加重平均計算する際の重みを設定する(ステップC33)。具体的には、開始日時が古い衛星暦組合せに対応する観測誤差ほど、重みが小さくなるように設定する。
【0101】
そして、CPU310は、全ての衛星暦組合せについてステップC29で算出した観測誤差を、ステップC33で設定した重みを用いて加重平均計算し、当該GPS衛星の当該期間における衛星観測誤差として記憶する(ステップC35)。より具体的には、加重平均計算の重みを「k1〜kN」、観測誤差を「e1〜eN」とした場合、次式(2)及び(3)に従って衛星観測誤差「Eo」を算出する。
Eo=(k1/K)×e1+(k2/K)×e2+・・・+(kN/K)×eN
・・・(2)
K=k1+k2+・・・+kN ・・・(3)
但し、「N」は衛星暦組合せの数である。
【0102】
その後、CPU310は、次のGPS衛星へと処理を移行する。そして、全てのGPS衛星についてステップC9〜C35の処理を行った後、CPU310は、ループGの処理を終了する(ステップC37)。また、全ての期間についてステップC7〜C37の処理を行った後、CPU310は、ループFの処理を終了する(ステップC39)。
【0103】
次いで、CPU310は、ステップC41〜C63の処理を行う。これらの処理は、
図14の長期予測エフェメリス生成処理のステップB25〜B47の処理と略同一である。異なるのは、ステップC55において、ステップC35で算出した衛星観測誤差に基づいて、当該GPS衛星の当該予測対象期間の予測軌道信頼度を決定する点である。
【0104】
具体的には、CPU310は、ROM340に記憶されている第2の予測軌道信頼度決定用データ345を参照し、ステップC35で算出した衛星観測誤差が含まれる衛星観測誤差範囲3451を判定する。そして、判定した衛星観測誤差範囲3451に対応する予測軌道信頼度3453を読み出して、当該GPS衛星の当該予測対象期間の予測軌道信頼度に決定する。
【0105】
2−3.作用効果
第2実施形態によれば、サーバシステム3は、衛星予測暦及び衛星精密暦の複数の組合せそれぞれについて、各期間毎に、観測位置から予測位置までの距離に当該予測位置におけるGPS衛星SVの時計予測誤差分の計測距離誤差を加味した第1の距離を算出する。また、観測位置から実績位置までの距離に、当該実績位置におけるGPS衛星SVの時計実績誤差分の計測距離誤差を加味した第2の距離を算出する。次いで、第1の距離と第2の距離との差(観測距離誤差)を算出する。そして、各期間毎に、観測距離誤差を加重平均計算して衛星観測誤差を算出し、算出した衛星観測誤差を用いて、各予測対象期間における予測軌道信頼度を決定する。
【0106】
長期予測エフェメリスの生成日時に開始日時が近い衛星暦組合せについて算出された観測距離誤差ほど、観測距離誤差を正確に再現したものである可能性が高い。そのため、開始日時が長期予測エフェメリスの生成日時に近いほど重みを高く設定し、逆に開始日時が古いほど重みを低く設定して、観測距離誤差を加重平均計算する。これにより、予測軌道の信頼性を適確に判定し、より適切な信頼性パラメータの値を携帯型電話機4に提供することが可能となる。
【0107】
3.変形例
3−1.測位システム
上述した実施形態では、サーバシステム3と携帯型電話機4を備えた測位システム1を例に挙げて説明したが、本発明を適用可能な測位システムはこれに限られるわけではない。例えば、携帯型電話機4の代わりに、測位装置を備えたノート型パソコンやPDA(Personal Digital Assistant)、カーナビゲーション装置等の電子機器に適用することも可能である。
【0108】
また、上述した実施形態では、情報提供装置の一種としてサーバシステム3を例に挙げて説明したが、情報提供装置はサーバシステム3に限られるわけではない。例えば、汎用のパソコン等であってもよい。
【0109】
3−2.衛星測位システム
また、上述した実施形態では、衛星測位システムとしてGPSを例に挙げて説明したが、WAAS(Wide Area Augmentation System)、QZSS(Quasi Zenith Satellite System)、GLONASS(GLObal NAvigation Satellite System)、GALILEO等の他の衛星測位システムであってもよい。
【0110】
3−3.衛星位置誤差
第1実施形態では、各期間それぞれについて、全ての衛星暦組合せについて算出した衛星位置間距離の平均値を算出して衛星位置誤差とするものとして説明したが、衛星位置誤差を次のように求めてもよい。すなわち、全ての衛星暦組合せについて算出した衛星位置間距離のうちの最大値を判定して衛星位置誤差とする。この場合、ある1つの期間について衛星位置間距離が極端に大きくなったような場合(衛星位置の誤差が極端に大きくなったような場合)を検出して、適切な予測軌道信頼度を設定することが可能となる。
【0111】
また、各期間それぞれについて、次式(4)に従って衛星位置誤差を算出することとしてもよい。
Ep=dAVE+R・(dMAX−dAVE) ・・・(4)
但し、「Ep」は衛星位置誤差、「dAVE」は衛星位置間距離の平均値、「dMAX」は衛星位置間距離の最大値、「R」は、衛星位置間距離が、当該期間における全てのGPS衛星の衛星位置間距離を平均した値の2倍以上となった率である。この場合は、極端に大きな衛星位置間距離が多数存在する期間ほど、衛星位置誤差が大きくなるため、予測軌道の信頼性は低く判定されることになる。
【0112】
さらには、衛星位置に時計誤差分の位置誤差を加味した位置を用いて衛星位置誤差を算出することとしてもよい。具体的には、各期間について、衛星予測暦に含まれる予測位置及び時計予測誤差を読み出し、予測位置に時計予測誤差分の位置誤差を加味した位置を第1の衛星位置として算出する。同様に、衛星精密暦に含まれる実績位置及び時計実績誤差を読み出し、実績位置に時計実績誤差の位置誤差を加味した位置を第2の衛星位置として算出する。そして、第1の衛星位置と第2の衛星位置間の距離を衛星位置間距離とし、この衛星位置間距離を期間毎に平均することで、衛星位置誤差を算出する。
【0113】
3−4.衛星観測誤差
第2実施形態では、各期間について算出された観測誤差を加重平均計算することで衛星観測誤差を算出するものとして説明したが、衛星観測誤差を次のように求めてもよい。すなわち、各期間について算出された観測誤差の標準偏差(σ)を求め、観測誤差の平均値から標準偏差だけ離れた信頼区間(1σ)に含まれる観測誤差の平均値又は最大値を求める。そして、求めた平均値又は最大値を、当該期間における衛星観測誤差とする。
【0114】
この場合、1σの信頼区間に含まれない大きな観測誤差は無視した上で、大部分の観測誤差が分布している範囲に含まれる観測誤差の大きさに基づいて衛星観測誤差を求めることになり、観測誤差の平均とばらつきとを考慮して、予測軌道の信頼性を適切に判定することが可能となる。
【0115】
3−5.長期予測エフェメリスの生成
上述した実施形態では、サーバシステム3が長期予測エフェメリスデータを生成して携帯型電話機4に提供するものとして説明したが、携帯型電話機4が自ら長期予測エフェメリスデータを生成することとしてもよい。すなわち、携帯型電話機4が外部システム2から定期的に衛星予測暦及び衛星精密暦を取得し、取得した衛星予測暦及び衛星精密暦を用いて長期予測エフェメリス生成処理を実行することで、長期予測エフェメリスデータを生成する。携帯型電話機4の代わりに、測位装置を備えたノート型パソコンやPDA、カーナビゲーション装置等の電子機器に適用する場合も同様である。
【0116】
また、上述した実施形態では、サーバシステム3が予め所定の時間間隔(例えば4時間に1回)で長期予測エフェメリスデータを生成しておき、携帯型電話機4から長期予測エフェメリスデータの要求を受けた場合に、生成しておいた長期予測エフェメリスデータを送信するものとして説明した。このような構成ではなく、サーバシステム3が、携帯型電話機4から長期予測エフェメリスデータの要求を受けたときに長期予測エフェメリスデータを生成して、携帯型電話機4に送信する構成としてもよい。
【0117】
3−6.生成対象期間
上述した実施形態では、長期予測エフェメリスの生成日時を基準として1週間後までの期間を生成対象期間として長期予測エフェメリスを生成するものとして説明したが、生成対象期間は1週間よりも長い期間(例えば2週間)としてもよいし、1週間よりも短い期間(例えば3日)としてもよい。GPS衛星SVから送信される航法データとしてのエフェメリスは有効期間が一般に4時間程度であるが、長期予測エフェメリスは少なくともGPS衛星SVから送信される航法データとしてのエフェメリスよりも有効期間が長ければよい。1日以上であれば好適である。
【0118】
3−7.予測対象期間
また、上述した実施形態では、予測対象期間の長さを6時間とするものとして説明したが、これに限定されるわけではなく、4時間や8時間等としてもよく、適宜設定可能であることは勿論である。
【0119】
3−8.衛星暦組合せの抽出
第1実施形態では、開始日時が異なる1週間分の衛星暦組合せ(衛星予測暦及び衛星精密暦)を抽出して衛星位置誤差を算出するものとして説明したが、抽出する衛星暦組合せは1週間分に限られるわけではなく、これよりも長い期間分(例えば2週間分)としてもよいし、これよりも短い期間分(例えば5日分)としてもよい。
【0120】
また、第2実施形態では、開始日時が異なる4週間分の衛星暦組合せを抽出して衛星観測誤差を算出するものとして説明したが、この場合も同様に、これよりも長い期間(例えば8週間分)の衛星暦組合せを抽出することにしてもよいし、これよりも短い期間分(例えば2週間分)の衛星暦組合せを抽出することにしてもよい。
【図面の簡単な説明】
【0121】
【図1】測位システムの概略構成を示す図。
【図2】予測軌道信頼度の決定方法の説明図。
【図3】サーバシステムの機能構成を示すブロック図。
【図4】サーバシステムのROMに格納されたデータの一例を示す図。
【図5】サーバシステムのハードディスクに格納されたデータの一例を示す図。
【図6】予測軌道信頼度決定用データのデータ構成の一例を示す図。
【図7】衛星予測暦データベースのデータ構成の一例を示す図。
【図8】衛星精密暦データベースのデータ構成の一例を示す図。
【図9】衛星位置誤差データベースのデータ構成の一例を示す図。
【図10】長期予測エフェメリスデータのデータ構成の一例を示す図。
【図11】予測エフェメリスのデータ構成の一例を示す図。
【図12】長期予測エフェメリス提供処理の流れを示すフローチャート。
【図13】長期予測エフェメリス生成処理の流れを示すフローチャート。
【図14】長期予測エフェメリス生成処理の流れを示すフローチャート。
【図15】第2の予測軌道信頼度決定用データのデータ構成の一例を示す図。
【図16】第2の長期予測エフェメリス生成処理の流れを示すフローチャート。
【図17】第2の長期予測エフェメリス生成処理の流れを示すフローチャート。
【符号の説明】
【0122】
1 測位システム 、 2 外部システム、 3 サーバシステム、
4 携帯型電話機、 310 CPU、 320 操作部、 330 通信部、
340 ROM、 350 ハードディスク、 360 RAM、 370 バス、
SV GPS衛星
【特許請求の範囲】
【請求項1】
測位用衛星の予測位置を時系列に含んだ予測位置データと前記予測位置に対応する前記測位用衛星の実績位置を時系列に含んだ実績位置データとを用いて、少なくとも1日以上の対象期間における衛星軌道を予測した長期予測軌道データの信頼性を判定することを含む長期予測軌道データの信頼性判定方法。
【請求項2】
前記長期予測軌道データは、前記対象期間を区切ったN個の所定期間における衛星軌道を予測したデータでなり、
前記判定することは、前記予測位置データに含まれる予測位置を前記所定期間と同じ長さの期間毎に時系列にグループ分けした場合の第M期間(M=1,2,・・・,N)の予測位置と当該予測位置に対応する前記実績位置とを用いて、前記長期予測軌道データの第M期間のデータの信頼性を判定することである、
請求項1に記載の長期予測軌道データの信頼性判定方法。
【請求項3】
前記予測位置データには、予測を行った日時が異なる複数の予測位置データがあり、
前記判定することには、
前記複数の予測位置データについて当該予測位置データに含まれる第M期間の予測位置と当該予測位置に対応する前記実績位置との差を算出して、第M期間における予測位置と実績位置との差を分析することと、
前記分析結果を用いて、前記長期予測軌道データの第M期間のデータの信頼性を判定することと、
が含まれる、
請求項2に記載の長期予測軌道データの信頼性判定方法。
【請求項4】
前記予測位置と前記実績位置との差を、所与の観測位置から前記予測位置までの距離と前記観測位置から前記実績位置までの距離との差として算出することを更に含む請求項3に記載の長期予測軌道データの信頼性判定方法。
【請求項5】
前記予測位置と前記実績位置との差を、前記観測位置から前記予測位置までの距離に、当該予測位置における前記測位用衛星の時計予測誤差分の計測距離誤差を加味した距離と、前記観測位置から前記実績位置までの距離に、当該実績位置における前記測位用衛星の時計実績誤差分の計測距離誤差を加味した距離との差として算出することを更に含む請求項3に記載の長期予測軌道データの信頼性判定方法。
【請求項6】
前記予測位置を地球上に投影した位置と前記実績位置を地球上に投影した位置との中間位置を前記観測位置として算出することを更に含む請求項4又は5に記載の長期予測軌道データの信頼性判定方法。
【請求項7】
長期予測軌道データを生成することと、
請求項1〜6の何れか一項に記載された長期予測軌道データの信頼性判定方法を用いて、前記生成した長期予測軌道データの信頼性を判定することと、
前記生成した長期予測軌道データと前記判定した判定結果とを測位装置に提供することと、
を含む長期予測軌道データの提供方法。
【請求項8】
少なくとも1日以上の対象期間における衛星軌道を予測した長期予測軌道データを生成する生成部と、
測位用衛星の予測位置を時系列に含んだ予測位置データと前記予測位置に対応する前記測位用衛星の実績位置を時系列に含んだ実績位置データとを用いて、前記長期予測軌道データの信頼性を判定する判定部と、
前記長期予測軌道データと前記判定部による判定結果とを測位装置に提供する提供部と、
を備えた情報提供装置。
【請求項1】
測位用衛星の予測位置を時系列に含んだ予測位置データと前記予測位置に対応する前記測位用衛星の実績位置を時系列に含んだ実績位置データとを用いて、少なくとも1日以上の対象期間における衛星軌道を予測した長期予測軌道データの信頼性を判定することを含む長期予測軌道データの信頼性判定方法。
【請求項2】
前記長期予測軌道データは、前記対象期間を区切ったN個の所定期間における衛星軌道を予測したデータでなり、
前記判定することは、前記予測位置データに含まれる予測位置を前記所定期間と同じ長さの期間毎に時系列にグループ分けした場合の第M期間(M=1,2,・・・,N)の予測位置と当該予測位置に対応する前記実績位置とを用いて、前記長期予測軌道データの第M期間のデータの信頼性を判定することである、
請求項1に記載の長期予測軌道データの信頼性判定方法。
【請求項3】
前記予測位置データには、予測を行った日時が異なる複数の予測位置データがあり、
前記判定することには、
前記複数の予測位置データについて当該予測位置データに含まれる第M期間の予測位置と当該予測位置に対応する前記実績位置との差を算出して、第M期間における予測位置と実績位置との差を分析することと、
前記分析結果を用いて、前記長期予測軌道データの第M期間のデータの信頼性を判定することと、
が含まれる、
請求項2に記載の長期予測軌道データの信頼性判定方法。
【請求項4】
前記予測位置と前記実績位置との差を、所与の観測位置から前記予測位置までの距離と前記観測位置から前記実績位置までの距離との差として算出することを更に含む請求項3に記載の長期予測軌道データの信頼性判定方法。
【請求項5】
前記予測位置と前記実績位置との差を、前記観測位置から前記予測位置までの距離に、当該予測位置における前記測位用衛星の時計予測誤差分の計測距離誤差を加味した距離と、前記観測位置から前記実績位置までの距離に、当該実績位置における前記測位用衛星の時計実績誤差分の計測距離誤差を加味した距離との差として算出することを更に含む請求項3に記載の長期予測軌道データの信頼性判定方法。
【請求項6】
前記予測位置を地球上に投影した位置と前記実績位置を地球上に投影した位置との中間位置を前記観測位置として算出することを更に含む請求項4又は5に記載の長期予測軌道データの信頼性判定方法。
【請求項7】
長期予測軌道データを生成することと、
請求項1〜6の何れか一項に記載された長期予測軌道データの信頼性判定方法を用いて、前記生成した長期予測軌道データの信頼性を判定することと、
前記生成した長期予測軌道データと前記判定した判定結果とを測位装置に提供することと、
を含む長期予測軌道データの提供方法。
【請求項8】
少なくとも1日以上の対象期間における衛星軌道を予測した長期予測軌道データを生成する生成部と、
測位用衛星の予測位置を時系列に含んだ予測位置データと前記予測位置に対応する前記測位用衛星の実績位置を時系列に含んだ実績位置データとを用いて、前記長期予測軌道データの信頼性を判定する判定部と、
前記長期予測軌道データと前記判定部による判定結果とを測位装置に提供する提供部と、
を備えた情報提供装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2010−101803(P2010−101803A)
【公開日】平成22年5月6日(2010.5.6)
【国際特許分類】
【出願番号】特願2008−274559(P2008−274559)
【出願日】平成20年10月24日(2008.10.24)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
【公開日】平成22年5月6日(2010.5.6)
【国際特許分類】
【出願日】平成20年10月24日(2008.10.24)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
[ Back to top ]