
長期記憶効果の存在下で非線形成分について信号をプリディストーションする方法
【課題】記憶効果又はメモリ効果(memory effect)が存在する中で、非線形成分について信号をプリディストーションする方法を提供する。
【解決手段】信号をプリディストーションする方法及びシステム10が、非線形成分100をモデル化する試験信号を提供する。モデルの静的部分及び動的部分を表すモデルカーネルが、試験信号に応じて非線形成分100の出力から抽出される。動的部分は、非線形成分100の記憶効果を表す。次に、モデルカーネルを用いて逆記憶モデル成分モデルを計算する。逆記憶モデルを用いて入力信号がプリディストーションされる。
【解決手段】信号をプリディストーションする方法及びシステム10が、非線形成分100をモデル化する試験信号を提供する。モデルの静的部分及び動的部分を表すモデルカーネルが、試験信号に応じて非線形成分100の出力から抽出される。動的部分は、非線形成分100の記憶効果を表す。次に、モデルカーネルを用いて逆記憶モデル成分モデルを計算する。逆記憶モデルを用いて入力信号がプリディストーションされる。
【発明の詳細な説明】
【背景技術】
【0001】
マイクロ波電力増幅器は、無線電気通信システムにおいて重要なコンポーネントである。これらの増幅器に伴う既知の問題は、これらの増幅器が、通常、変調を有する搬送波である入力信号を大幅に歪ませる可能性があることである。この歪みによって、電気通信チャネルにおいて誤りが生じる。増幅器歪みを除去するか又は最小にする手法は、入力信号をプリディストーションする(predistoring)ことを伴う。この手法によれば、複素包絡線A(t)によって表される入力信号に非線形プリディストータ(predistorter)演算子P[・]が適用される。この結果、プリディストーションされた信号(predistorted signal)P[A(t)]が得られる。プリディストーションされた信号P[A(t)]は増幅器に印加される。増幅器が入力信号としてP[A(t)]を受信したときに、増幅器出力がA(t)の完全に増幅されたもの(amplified version)に等しい場合、P[・]は完全プリディストーション演算子である。プリディストータは、増幅器の非線形歪みを完全に打ち消すように入力信号A(t)を歪ませる。
【0002】
増幅器歪みを除去することは、長期記憶効果又は長期メモリ効果(long term memory effect)の存在に起因して、多くの実際的な事例において困難である。長期記憶効果は、動的に変化する内部バイアス、温度、又はトラップ状態に起因する可能性がある。このため、増幅器の歪み特性は、入力信号の履歴に依拠する。これは、プリディストーション演算子P[・]が単純な静的マップとはならず、入力信号A(t)の履歴を考慮に入れる動的演算子となることを意味する。
【0003】
入力信号X(t)について、増幅器出力信号Y(t)は関数演算子F[・]を用いて以下のように数学的に表すことができる。
Y(・)=F[X(・)] (1)
Y(・)、X(・)、及びP[・]等のシンボル又は用語は、本明細書全体を通じて様々に用いられ、特に、(・)及び[・]の使用は、時間、距離、温度等の1つ又は複数の引数の汎用表現を表す。式(1)において、演算子Fは単にX(t)をY(t)にマッピングする関数ではなく、X(t)の系列全体をY(t)にマッピングする関数演算子である。
【0004】
従来のプリディストータアルゴリズムは、入力信号X(t)の離散サンプリングされたもの(discrete sampled version)に基づいており、これは以下のように表すことができる。
Xn=X(nTS) (2)
式(2)において、下付き文字「n」はサンプリング時刻Tsを「n」倍した時刻におけるサンプリング値を表す。プリディストータアルゴリズムは通常、以下のように与えられるプリディストーションされた信号XPDnに基づく。
【数1】

式(3)において、F(・)は一組の係数β1,β2,...等によってパラメータ化された多次元関数である。係数は、多項式、ニューラルネット、並びに様々な形式の組合せ及び変形の形態をとることができる。係数は試験系列に基づいて計算することができる。ここで、試験入力信号XT(t)が増幅器に印加され、対応する出力信号YT(t)が測定されて、係数が導出される。
【0005】
しかしながら、一組の計算された定数の係数を有する関数F(・)は、試験系列と同じスペクトル特性及び統計特性を有する入力信号に対してのみ良好なプリディストータとして適合する。上述したプリディストータアルゴリズムに基づくプリディストータは、少なくとも試験系列と同じ変調帯域幅及び振幅分布を有する入力信号に対してのみ効果的である。そのような従来のプリディストータの性能は、入力信号の平均電力が変化したとき、又は入力信号が試験系列と大幅に異なる振幅分布を有する異なるタイプの変調を有するとき等、入力信号が試験系列と同じ変調帯域幅及び振幅分布を有しないときに急速に劣化する。上述したような従来のプリディストータは、入力信号の振幅分布及び帯域幅の影響を受けやすい。
【0006】
関数F(・)の複雑度は増大させることができるが、結果として係数の数も増大する。これらの係数は、直接測定することができず、代わりに、実行するのが非常に困難なフィッティング手順によって求めなくてはならない。代替形態として、実際に測定された入力信号系列及び対応する出力信号系列を試験系列として用いて、係数の新たな組を連続して計算することができる。しかしながら、この複雑な非線形フィードバックループ手法は、多くのデジタル部品及びアナログ部品を必要とし、効率的でロバストな方式で実施するのが非常に困難であり、入力信号の特性の突然の変化に応じて正確性を達成するのに大量の時間が必要とされる。
【発明の概要】
【発明が解決しようとする課題】
【0007】
必要とされているのは、広範にわたる入力信号変調帯域幅及び全ての可能性のある入力信号振幅分布について記憶効果又はメモリ効果(memory effect)が存在する中で、非線形成分について信号をプリディストーションする方法であって、その方法は、入力信号電力レベル又は変調方式の影響を受けず、入力信号の全ての可能なピーク対平均比に適しており、プリディストータ係数の連続再計算を必要とするフィードバックを含まず、フィードフォワード手法を用いて実施することができる、方法である。
【課題を解決するための手段】
【0008】
代表的な実施の形態では、非一時的コンピュータ可読媒体が、信号をプリディストーションする、コンピュータによって実行可能なプログラムを格納し、プログラムは、コンピュータに対して、試験信号を生成する生成手順と、試験信号に応答した出力信号からシステムモデルを生成するシステムモデル手順であって、前記システムモデルは、システムの記憶効果を特徴付ける動的部分を含む、システムモデル手順と、システムモデルから逆記憶モデルを生成する記憶モデル手順と、逆記憶モデルを用いて入力信号をプリディストーションするプリディストーション手順と、を実行させる。
【0009】
別の代表的な実施の形態では、方法が、試験信号を生成するステップと、試験信号に応答した出力信号からシステムモデルを生成するステップであって、システムモデルは、システムの記憶効果を特徴付ける動的部分を含む、生成するステップと、システムモデルから逆記憶モデルを生成するステップと、前記逆記憶モデルを用いて入力信号をプリディストーションするステップと、を含む。
【0010】
更なる代表的な実施の形態では、プリディストーションシステムが、入力信号を受信する入力デバイスと、試験信号に応答した出力信号からシステムモデルを生成し、システムモデルから逆記憶モデルを生成するように構成された処理デバイスとを備える。システムモデルは、システムの記憶効果を特徴付ける動的部分を含む。プリディストーションシステムはまた、逆記憶モデルを用いて入力信号をプリディストーションするように構成されたプリディストータを備える。
【0011】
実施形態例は、以下の詳細な説明を添付の図面とともに読むとき、その詳細な説明から最も良好に理解される。適用可能で実際的である場合はどこでも、類似の参照符号は類似の要素を指す。
【図面の簡単な説明】
【0012】
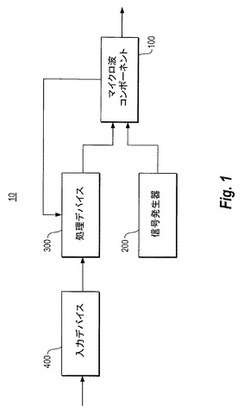
【図1】代表的な実施形態による、入力信号をプリディストーションするシステムを示す単純化されたブロック図である。
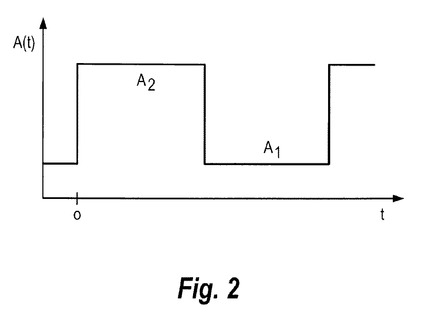
【図2】代表的な実施形態による、マイクロ波コンポーネント100に印加される一組のRF大ステップ信号を示すグラフである。
【図3】代表的な実施形態による、一組のRF大ステップ信号に応じてマイクロ波コンポーネント100から出力される一組のRF大信号ステップ応答信号を示すグラフである。
【図4】代表的な実施形態による、対応する信号を含む動的プリディストータの基本原理を示すブロック図である。
【図5】代表的な実施形態による、シミュレーションの結果を示すグラフである。
【図6】代表的な実施形態による、別のシミュレーションの結果を示すグラフである。
【図7】代表的な実施形態による、広帯域変調の更なるシミュレーションの結果を示すグラフである。
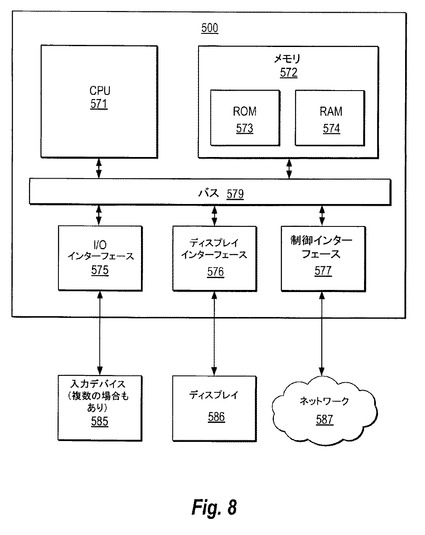
【図8】代表的な実施形態による、図1に示すシステム10の動作を制御するアルゴリズムを実行するためのコンピュータシステム500を示す機能ブロック図である。
【発明を実施するための形態】
【0013】
以下の詳細な説明では、限定ではなく説明のために、特定の詳細を開示する実施形態例が、本教示による一実施形態の完全な理解を提供するために説明される。しかし、本明細書で開示される特定の詳細から逸脱する本教示による他の実施形態が、添付の特許請求の範囲の範囲内に留まることが本開示の利益を受ける当業者に明らかであろう。さらに、よく知られている装置及び方法の説明は、実施形態例の説明を不明瞭にしないために省略される場合がある。こうした方法及び装置は、明らかに本教示の範囲内にある。
【0014】
上述したように、従来のプリディストーション技術は、入力信号における変調の帯域幅及び振幅分布の影響を受けやすい。以下で説明される代表的な実施形態では、その全体を引用することにより本明細書の一部を成すものとする、「Method and System For Characterizing, Modeling and Simulating Non-Linear Long Term Memory Effects」と題する2010年5月26日に出願された同時係属出願第12/787,736号に記載されている隠れ変数モデルを用いて増幅器が特徴付けられる。隠れ変数モデルは、長期記憶効果を有する増幅器の歪みを予測する。増幅器の記憶効果を説明する隠れ変数モデル(hidden variables model)のカーネル(kernel)から、一組の逆カーネル(an inverse set of kernels)が計算され、理想的な入力信号に適用され、プリディストーションされた信号が生成される。プリディストーションされた信号は増幅器に印加され、増幅器は、入力信号の、実質的に完全に増幅され、実質的に歪められていないもの(non-distorted version)を出力として提供する。逆演算子は、長期記憶効果によって生じた歪みを実質的に除去し、本質的に、入力信号における変調の帯域幅及び振幅分布の影響を受けない。増幅器が劣化しない限り、一組の逆カーネルは1回のみ計算されればよい。
【0015】
以下の説明は、長期記憶効果を有する増幅器の歪みを予測する増幅器の動的Xパラメータカーネル、及びプリディストーションされた信号を生成するのに用いられるプリディストータの動的Xパラメータカーネルの導出及び実施を提供する。
【0016】
図1は、代表的な実施形態による、入力信号をプリディストーションするシステムを示す簡略化されたブロック図である。図1において、システム10は、処理デバイス300に接続された入力デバイス400と、処理デバイス300及び信号発生器200に接続されたマイクロ波コンポーネント100とを備える。この例では、マイクロ波コンポーネント100は電力増幅器であり、以下で増幅器と呼ばれる場合がある。一方、代替形態におけるマイクロ波コンポーネント100は、本教示の範囲から逸脱することなく、トランジスタ、ダイオード、モノリシックマイクロ波集積回路(MMIC)、マルチチップモジュール(MCM)、非線形電子アナログコンポーネント又は回路、及び非線形RFシステム等の他のタイプのデバイスとすることができる。
【0017】
入力デバイス400には、増幅される入力信号が提供される。一実施形態では、入力デバイス400は、RFフロントエンド及びダウンコンバータを備えることができ、アナログRF信号を処理デバイス300に提供することができる。処理デバイス300は、処理のためにRF信号をデジタル信号に変換する初期段階として、デジタルIQ復調(アナログ/デジタル変換)を含むことができる。別の実施形態では、入力デバイス400は加えて、デジタル信号を直接生成するA/D変換器を備えることができ、デジタル信号を処理デバイス300に提供することができ、それによって処理デバイス300におけるデジタルIQ復調が不要となる。後述するように、処理デバイス300はプリディストーションされた信号を生成しマイクロ波コンポーネント100に提供する。マイクロ波コンポーネント100が増幅器である一実施形態では、マイクロ波コンポーネント100は、プリディストーションされた信号に応じて、入力信号の実質的に完全に増幅されたものを出力する。
【0018】
信号発生器200は、試験信号A(t)を生成し出力するように構成される。試験信号A(t)は、図2に示すような一組の複数のRF大信号ステップとすることができる。信号発生器200は、独立した外的マイクロ波源、又はネットワーク分析器若しくは非線形ネットワーク分析器の内部マイクロ波源、又は刺激として試験信号を提供することが可能な任意のマイクロ波源を含むことができる。
【0019】
初期段階は、マイクロ波コンポーネント100の動作領域電力レベルを定義することである。これはA(t)の範囲を設定する。A(t)は、マイクロ波コンポーネント100の入力に印加される進行波とすることができる。A(t)は、実質的に準完全であり、最小限の雑音しか有せずクリーンである一組の複数のRF大信号ステップを含むものとして生成される。一組の大信号ステップは、初期時刻t=0において第1の初期電力レベルA1から第2の電力レベルA2に切り替わる。図2に示すような一組のRF大信号ステップA(t)の電力レベルA1及びA2の双方が、マイクロ波コンポーネント100の動作範囲全体にわたってステッピングされ、可能性のある入力信号振幅値の範囲をカバーする。一組のRF大信号ステップA(t)内の各ステップの持続時間は、マイクロ波コンポーネント100の長期記憶効果の持続時間よりも大幅に長く、それによって、図3に示すマイクロ波コンポーネント100の出力包絡線B(t)は、出力振幅レベルが切り替わる前に定常状態に達している。一組のRF大信号ステップA(t)は、例えば2次元グリッド上の1組の点として表すことができる。
【0020】
図2に示す一組の複数のRF大信号ステップは、図1において信号発生器200からマイクロ波コンポーネント100に提供される。マイクロ波コンポーネント100はその後、一組のRF大信号ステップA(t)に対する単純な一組のRF大信号ステップ応答からなる出力信号B(t)を提供する。出力信号B(t)を用いて、式(4)によって記述された挙動モデルに基づいてモデルカーネルFCW(・)及びG(・)が導出される。これについて以下で論考する。
【0021】
挙動モデルの導出に関して、この例では増幅器であるマイクロ波コンポーネント100を、入射基本信号である入力信号A(t)と、増幅された信号である出力信号B(t)とを有するものとして考える。説明の目的で、信号は変調した搬送波の複素包絡線表現であるとみなされる。入力信号は、固定周波数を有する変調された搬送波として表すことができると仮定される。モデルは、包絡線情報信号のみを処理するいわゆる低域通過等価モデルとして特徴付けることができる。A(t)とB(t)との間の関係は、以下に示すように式(4)として正確に記述することができる。
【数2】
【0022】
挙動モデルの基本概念又は特性は、B(t)は、非線形関数FCW(・)によって表される静的部分と、非線形関数G(・)の経時的な単純な積分によって表される動的部分との重ね合わせとして書くことができるということである。当業者に明らかであるはずであるように、全体を通じて様々に用いられるような、FCW(・)又はG(・)等のシンボル又は用語、特に(・)の使用は、時間、距離、温度等の1つ又は複数の引数の汎用表現を表す。非線形関数FCW(・)及び積分された関数G(・)のそれぞれは、入力信号A(t)の瞬時振幅の関数である。入力信号の位相に対する依存度は、別個の乗法ベクトルexp(jφ(A(t)))として表される。以降の数学的表記を簡単にするために、以下を理解すべきである。
【数3】
【0023】
当業者に明らかとなるように、この位相依存度は、時間遅延不変の原理によって説明することができる。静的部分は従来のPHDモデルのように動作する。動的部分は、記憶効果を表すので独自性がある。これらは入力信号A(t)の瞬時振幅と、入力信号A(t−u)の過去の値と、過去の値がどれだけ前に生じたか(変数u)との汎用非線形関数の積分効果として説明される。以下に示すように、モデル式(4)は、隠れ変数の表記を用いて導出することができる。
【0024】
モデル式(4)の導出の開始点は、単純な静的PHDモデル式であり、これは式(5)に示すような、単純な圧縮及びAM対PM特性に等しい。
【数4】
式(5)において、関数F(・)は、入力信号の振幅から、対応する出力信号振幅及び位相へのマッピングを表し、ここで、入力信号の位相に対する依存度は、別個の乗法ベクトルとして表される。
【0025】
記憶効果は、1つ又は複数の隠れ変数を用いて導入することができる。着想は、記憶を有するシステムにおいて、入力信号から出力信号へのマッピングは、入力信号振幅のみの関数ではなく、任意の個数N個のアプリオリに知られていない隠れ変数h1(t),h2(t),...,hN(t)の関数でもあることである。これらの変数は、温度、バイアス電圧又はバイアス電流、トラップ状態等の、入力信号から出力信号へのマッピングに影響を及ぼす、コンポーネント内の時変物理量を表す。隠れ変数を導入することによって、式(5)は以下のように式(6)となる。
【数5】
【0026】
ブラックボックスモデル化手法との関連で式(6)を有用にするために、隠れ変数と入力信号との間の関係に関する仮定が必要である。マイクロ波コンポーネントの物理学に関するアプリオリ情報を用いてこの関係を見つけることができるが、代わりに、入力信号と隠れ変数との間の関係に対するブラックボックス仮定は、式(7)に示すように数学的に表すことができる。
【数6】
当業者には明らかとなるように、シンボル∀は全称記号を表し、これは平たく言えば「任意のものを所与として」又は「全てについて」と読み替えることができる。
【0027】
式(7)は、i番目の隠れ変数が、そのインパルス応答ki(・)によって特徴付けられた、入力信号振幅|A(・)|の非線形関数Pi(・)に対する演算を行う線形フィルタ演算によって生成されることを表す。非線形関数Pi(・)は、入力信号がどのように特定の隠れ変数の励起と関係付けられるかを表すソース項として解釈することができ、通常、これは非線形関係である。例えば、非線形関数P1(・)は、入力信号の関数として電力散逸であるとみなすことができ、ここでh1(・)は温度である。インパルス応答ki(・)は、隠れ変数の実際の動力学を表し、ここでk1(・)は例えば熱緩和を表すことができる。1つのみの隠れ変数を有する上記の式の特殊な事例を以下のように提供することができる。
【数7】
ここで、uはダミー積分変数であり、Rは、タイムスケール又はパラメータを表す特定の値である。この上述した特殊な事例では、式(7)は、物理的には、振幅の二乗が、一次線形バイアス回路を通って流れるバイアス電流に関係するという仮定に関係し、これによってバイアス電圧の変動が生じ、これによってPHDモデルが変調される。一方、トラップ効果及び自己発熱等の他の物理的効果も式(7)によって表すことができ、ここで、散逸電力は、A(t)の非線形関数であり、温度変化を引き起こし、この温度変化は散逸電力に線形に関係し、これによってPHDモデルが調節されることを理解すべきである。一方、隠れ変数の実際の動力学を表す非線型関数Pi(・)及びインパルス応答ki(・)は上記の例に限定されず、当業者に明らかであるように、様々な他の例を包含するものと理解されるべきである。すなわち、システムモデルの動的部分は、温度、バイアス電圧、及びトラップ状態のうちの少なくとも1つを含むシステムの変動する動作状態に応じて変化する。
【0028】
その後、式(7)は隠れ変数hi(t)において線形化することができるという仮定に基づいて式(4)とのリンクが作成される。線形化するために、動作点を選択しなくてはならない。以下において、瞬時振幅|A(t)|に対応する隠れ変数の定常状態解の周りの線形化が選択される。換言すれば、入力振幅が全ての未来の時点について一定のままであり、振幅は瞬時入力振幅に等しいと仮定して、システムが達する定常状態解の周りで線形化が選択される。この線形化は、隠れ変数の定常状態解からの隠れ変数のずれは、常に、線形性の原則に違反しない程度に十分に小さいことを暗に仮定する。これらの定常状態解は、入力信号振幅の関数であり、以下でhiCW(・)によって表される。例えば、Xに等しい一定の入力信号振幅が適用される場合、hiCW(X)の値は隠れ変数hi(t)の漸近値に等しい。hiCW(・)の引数は信号振幅であるのに対し、隠れ変数hi(t)の引数は時間であることに留意されたい。関数hiCW(・)は、式(7)において、単にA(t−u)を定数Xによって置き換えることにより、容易に計算される。
【数8】
このとき、式(6)は以下のように書き換えることができる。
【数9】
【0029】
式(11)において、新たな変数Δi(t)は、瞬時入力信号振幅に対応する隠れ変数hi(t)の定常状態解からの隠れ変数のずれを表す。ここで、式(6)は、定常状態からのこれらのずれΔi(t)において線形化することができることが更に仮定される。この結果、以下の式(12)〜(14)が得られる。
【数10】
【0030】
関数Di(・)は、i番目の隠れ変数の変動に対する出力信号の影響度(sensitivity)を表す。例えば、h1(・)が温度を表す場合、D1(・)は、出力信号が温度変化に対してどの程度影響を受けるかを表す。Di(・)は瞬時入力信号振幅の汎用非線形関数であることに留意されたい。例えば、出力信号が、小さな入力信号(温度に依存する小さな信号利得に対応する)の場合には温度変化に対する影響が非常に大きいが、出力が完全に飽和する高い入力信号の場合には影響を全く受けないことも完全に可能である。
【0031】
式(12)の構造において、FCW(・)によって表される静的部分と、隠れ変数インデックス「i」にわたる総和によって表される動的部分とは区別することができる。式(13)を用いてF(・)から導出することができる静的部分は、従来の静的PHDモデルに対応する。FCW(・)において下付きの「CW」が用いられることに留意されたい。なぜなら、この関数は、単一トーン連続波(CW)励起に対する増幅器の応答に対応するためである。式(7)を用いた式(11)におけるhi(t)の置き換え、続いて式(11)を用いた式(12)におけるΔi(t)の置き換えの結果、以下が得られる。
【数11】
【0032】
式(9)を用い、また総和及び積分の順序を変更すると、式(15)は以下のように書き換えることができる。
【数12】
【0033】
通常、隠れ変数が何であるかも、隠れ変数が幾つ存在するか又は隠れ変数がどのようにシステムと相互作用するかも知られていない場合がある。それにもかかわらず、多変量関数G(x,y,u)は常に以下のように定義することができる。
【数13】
式(18)は式(4)と同一である。したがって、式(4)は隠れ変数手法から定義されている。
【0034】
式(17)は、多変量関数G(x,y,u)が任意でないことを明らかにする。なぜなら、以下の関係が常に有効となるためである。
【数14】
この特性は、関数G(・)を実験的に求める際に重要である。
【0035】
挙動モデルは、増幅器に印加された1組のRF大信号ステップに応じて増幅器から出力された単純な1組のRF大信号ステップ応答を測定することから完全に特定することができる。上述したように、入力される一組のRF大信号ステップは、信号が時点ゼロにおいて第1の値から第2の値に切り替わり、それによってマイクロ波コンポーネントへの可能性のある入力RF信号の全体範囲がカバーされるようにすることができる。プロセスは以下のように説明される。
【0036】
ステップ入力信号の印加を検討する。ここで、t<0についてA(t)=A1であり、t≧0についてA(t)=A2である。そのような大信号ステップ応答B(t)の解は、BLS(A1,A2,t)として表され、次に以下によって与えられる。
【数15】
【0037】
式(19)に起因して、式(21)は以下のように書き換えることができる。
【数16】
【0038】
上記の式の両辺において「t」に対して導関数をとることによって、以下が得られる。
【数17】
【0039】
式(4)の固有の因果関係の結果として、関数G(x,y,t)は、「t」の正値についてのみ定義されればよい。式(24)は複数の結果を有する。第1に、式(24)によって、関数G(x,y,t)の直接的な測定が可能になる。関数G(x,y,t)は、入力振幅「y」で開始し、時点0において入力振幅「x」に切り替わるときのステップ応答の導関数の逆をとることによって求められる。第2に、モデルとステップ応答との間に1対1のマッピングが存在する。全ての可能な大信号ステップ応答を測定することができるとすると、測定された大信号ステップ応答を生成することができる単純な非線形動的モデルは、式(4)によって表されるようなモデルである。
【0040】
上記の挙動モデルは、動的Xパラメータモデルと呼ばれる。示すように、モデルカーネル関数FCW(・)及びG(・)は、一組の大信号ステップ応答測定値から特定することができる。これは以下のように行うことができる。ここで、BLS(A1,A2,t)は、時点0においてレベルA1からレベルA2に切り替わる入力ステップに対応する出力信号に等しい。
【数18】
【0041】
したがって、動的xパラメータとの関連で、代表的な実施形態における増幅器の信号をプリディストーションする概念は、以下のように考えることができることになる。式(25)及び式(26)によって表されるような挙動モデルカーネルFCW(・)及びG(・)を有する増幅器を所与とすると、プリディストーション演算子P[・]は、任意の信号A(t)について、増幅器がプリディストーションされた入力信号P[A(t)]に応じて、出力として、信号A(t)の十分完全に増幅されたものを提供するように構築することができる。これは以下のように数学的に表すことができる。
【数19】
【0042】
式(27)において、変数αは利得を表す。換言すれば、演算子P[・]と動的Xパラメータモデルとのカスケード接続は、利得αを有する完全な歪みのない増幅器としてふるまうことになる。
【0043】
次に、代表的な実施形態の動的プリディストータの構築を以下のとおり説明する。まず、式(27)に基づいてP[・]の正確な解を求める直接的な方法は存在しないことに留意されたい。P[・]は動的非線形演算子の逆演算子に対応することが理解されるので、P[・]は動的非線型演算子でもあることになる。逆演算子P[・]自体を動的Xパラメータモデルによって近似することができると仮定することによって、実際的な解が見つかる。このため、逆演算子P[・]は以下によって表すことができる。
【数20】
【0044】
式(28)において、FP(・)及びGP(・)は、逆演算子P[・]の近似に対応する動的Xパラメータカーネルである。このとき、プリディストータの構築は、FCW(・)、G(・)、及びαの値を知ることに基づいてFP(・)及びGP(・)として定式化することができる。結果としてのプリディストータは、動的プリディストータとして特徴付けることができる。
【0045】
大信号ステップ応答と動的Xパラメータカーネルとの間に1対1の対応が存在することを用いて、FP(・)及びGP(・)を計算することができる。これは以下のように行われる。まず、AINV(B1,B2,t)として表記されるいわゆる逆大信号ステップ応答が計算され、ここで、AINV(B1,B2,t)は、結果として振幅レベルB1及びB2間の増幅器切替えの出力において完全なステップを生じ、ゼロ位相を有する特定の入力信号として定義される。逆大信号ステップ応答AINV(B1,B2,t)の計算の詳細については後に説明する。これらの逆大信号ステップ応答AINV(B1,B2,t)は、最大で利得係数αまで、動的プリディストータの大信号ステップ応答に対応する。換言すれば、動的プリディストータのモデルカーネルは、以下のように表すことができる。
【数21】
【0046】
FP(・)及びGP(・)の上記の選択は、図4に示すように、カーネルFP(・)及びGP(・)を有する動的Xパラメータモデル20と、カーネルFCW(・)及びG(・)を有する元の動的Xパラメータモデル30とのカスケード接続の大信号ステップ応答を単に計算することによって、正しいと実証することができる。すなわち、時点ゼロにおけるレベルA1からレベルA2への完全なステップ切替えは、モデルカーネルFP(・)及びGP(・)を有する動的Xパラメータモデル20の入力において適用することができる。構築によって、動的Xパラメータモデル20の出力における信号は、AINV(αA1,αA2,t)に等しい。次に、このプリディストータ出力信号を元の動的Xパラメータモデル30への入力信号として用いることができる。AINV(・)の定義によって、元の動的Xパラメータモデル30の出力信号は、時点ゼロにおいてレベルαA1からαA2に切り替わる完全なステップに等しくなる。換言すれば、カーネルFP(・)及びGP(・)を有する動的Xパラメータモデルと、カーネルFCW(・)及びG(・)を有する動的Xパラメータモデル30とのカスケードは、大信号ステップによって励起されるとき、利得αを有する完全な記憶なし増幅器システムのようにふるまう。このとき、モデルカーネルFP(・)及びGP(・)を有するプリディストータシステムは、任意の変調信号の良好なプリディストータとしてもふるまうことが単に仮定される。
【0047】
次に、上述した逆大信号ステップ応答の計算を以下のように説明する。説明したように、動的XパラメータカーネルFCW(・)及びG(・)を有する増幅器システムの代表的な実施形態の動的プリディストータの動的XパラメータカーネルFP(・)及びGP(・)は、式(29)及び式(30)の適用を通じてAINV(B1,B2,t)から容易に導出することができる。逆大信号ステップ応答AINV(B1,B2,t)の計算は、FCW(・)及びG(・)を知ることから実現することができる。これは、出力信号B(t)が、時点ゼロ(ゼロ位相を有する)において振幅レベルB1から振幅レベルB2に切り替わる完全なステップに等しいことを表すことによって、式(4)に基づいて達成することができる。t<0の場合、システムが連続波(CW)領域にあると仮定することができるので、解は自明であり、したがって以下となる。
【数22】
【0048】
これによって、関数FCW(・)が可逆であることが仮定される。∞に向けたtの極限において、システムがCW領域にあると仮定することもでき、したがって以下となる。
【数23】
【0049】
t>0の場合、B(t)が時点ゼロにおいてレベルB1から振幅レベルB2に切り替わる完全なステップに等しい積分方程式(4)を解く以外に選択肢が存在しない。B1及びB2の或る値を所与とすると、AINV(B1,B2,t)の値は、以下の式の解である時間依存関数X(t)に等しくなる。
【数24】
【0050】
式(33)を解くために、X(t)の振幅は、まず以下を解くことによって計算することができる。
【数25】
【0051】
次に、X(t)の位相は、単に以下によって与えられる。
【数26】
【0052】
式(34)を解く実際的な方法は、離散的時系列によって未知の関数X(t)を表し、離散的総和によって積分演算子を近似することである。これは、サンプリング時刻Tsを選択することによって開始することができる。アルゴリズムが正確であるためには、Tsは最も高速の長期記憶効果と関連付けられた時定数よりも大幅に小さい必要がある。Xiを用いてX(iTs)を表すことによって、式(34)は以下によって近似することができる。
【数27】
【0053】
【数28】
であるので、式(34)は以下のように書くことができる。
【数29】
式(31)に鑑みて、以下であることが理解される。
【数30】
このため、|X0|は以下の非線形式を解くことによって見つけることができる。
【数31】
X0の位相は以下のように与えることができる。
【数32】
次に、|X1|,|X2|,|X3|,...の値は、1,2,...等に等しい「i」について以下を連続して解くことによって見つけることができる。
【数33】
このため、位相は以下のように与えることができる。
【数34】
【0054】
Xiの計算は、「i」より小さいインデックス「k」を有するXkを知ることしか必要としないことに留意されたい。これは、任意の時点において、アルゴリズムが、未知数が1つしかない非線形式を解く必要があることを意味する。未知数間には結合が存在しない。実際には、最も大きな課題は、解を見つけることではなく、単に、「i」の多数の値並びにB1及びB2の複数の値についてアルゴリズムが繰り返されなければならないことである。一方、変数の非結合性(decoupling)は、この問題が、並列処理に非常に適していることを意味する。
【0055】
特定の動作範囲を有する増幅器の場合、動的プリディストータアルゴリズムを特定の搬送波周波数について構築することができる方式は以下のように要約することができる。
【0056】
ステップ1:完全な一組の大信号ステップに対する増幅器の応答を測定する。1つのそのような測定は、大信号ステップ応答測定と呼ばれる。これは、搬送波周波数において、時点ゼロにおいて1つの振幅レベルA1から異なる入力レベルA2まで切り替わる信号を印加することによって行われる。出力信号の対応する複素基本帯域表現は、BLS(A1,A2,t)として表記される。この実験は、増幅器の動作範囲全体がカバーされるように、A1及びA2の多くの異なる結合値について繰り返される。
【0057】
ステップ2:BLS(A1,A2,t)を知ると、式(25)及び式(26)を用いて、増幅器の2つの動的Xパラメータカーネル、すなわち静的部分FCW(・)、及び動的部分G(・)が計算される。この結果、増幅器の動的Xパラメータモデルが生じる。
【0058】
ステップ3:FCW(・)及びG(・)を知ると、FCW(・)及びG(・)を用いて、上記で説明したように、逆大信号ステップ応答関数AINV(B1,B2,t)が計算される。
【0059】
ステップ4:AINV(B1,B2,t)を知ると、式(29)及び式(30)を用いて、プリディストータの動的Xパラメータカーネル、すなわち静的部分FP(・)及び動的部分GP(・)が計算される。原理的には任意に選択することができる最終利得はαである。
【0060】
ステップ5:任意の入力信号A(t)について、対応する動的にプリディストーションされた信号AP(t)は、以下のように計算することができる。
【数35】
増幅器が入力信号AP(t)を用いて励起されるとき、出力信号B(t)は、理想的な増幅信号、すなわちαA(t)に非常に近づく。
【0061】
再び図1を参照すると、マイクロ波コンポーネント100はその後、一組のRF大信号ステップA(t)に対する単純な一組のRF大信号ステップ応答からなる出力信号B(t)を提供する。出力信号の対応する複素基本帯域表現は、BLS(A1,A2,t)として表記される。処理デバイス300は、一組のRF大信号ステップA(t)に応じてマイクロ波コンポーネント100によって生成される一組のRF大信号ステップ応答からなる対応する出力包絡線信号B(t)を測定する。式(25)及び式(26)を測定された大信号ステップ応答BLS(A1,A2,t)に適用することによって、処理デバイス300は、静的部分FCW(・)及び動的部分G(・)である、マイクロ波コンポーネント100の動的Xパラメータカーネルを計算する。静的部分FCW(・)及び動的部分G(・)は、マイクロ波コンポーネント100のシステムモデルとして特徴付けることができる。処理デバイス300は、そのような計算を提供するように構成又はプログラムされた任意のコンポーネント又はハードウェアを備えることができる。図3に示すように、例えば、過渡状態が終了した後のB(t)の定常状態値は、FCW(A2)及びFCW(A1)によって表される静的部分の値に対応する。B(t)の負の時間導関数−dB/dtは、G(A2,A1,t)及びG(A1,A2,t)の値として表される動的部分に対応する。複数のRF大信号ステップ応答のA1及びA2の全体範囲についてこの測定を繰り返すことによって、式(4)によって表されるモデルカーネルFCW(・)及びG(・)を完全に知るようになる。処理デバイス300によって計算されるようなFCW(A2)及びFCW(A1)の値、並びに処理デバイス300によって求められるようなG(A2,A1,t)及びG(A1,A2,t)の負の時間導関数は、表形式で収集することができる。このため、モデルの測定値とパラメータとの間の直接的なマッピングは、代表的な実施形態に従って実現される。このマッピングは、動的部分の3次元モデルとして特徴付けることができ、ここでG(・)の各値は2つの入力振幅及び時点に関係する。
【0062】
図1に示す処理デバイス300は、計算されたモデルカーネルFCW(・)及びG(・)から、次に、上述したように逆大信号ステップ応答関数AINV(B1,B2,t)を計算する。次に、処理デバイス300は、式(29)及び式(30)を用いて、静的部分FP(・)及び動的部分GP(・)である、プリディストーションの動的Xパラメータカーネルを計算する。静的部分FP(・)及び動的部分GP(・)は、マイクロ波コンポーネント100のシステムモデルに対応する逆記憶モデルとして特徴付けることができる。処理デバイス300はその後、式(44)を用いて、入力デバイス400から提供された入力信号A(t)の対応する動的にプリディストーションされた信号AP(t)を計算する。次に、プリディストーションされた信号AP(t)は、マイクロ波コンポーネント100に提供又は接続され、マイクロ波コンポーネント100はその後、入力信号A(t)の実質的に歪んでいないものである増幅信号αA(t)を出力する。代表的な実施形態では、入力信号A(t)は、符号分割多元接続(CDMA)、WCDMA、CDMA2000、ロングタームエボリューション(LTE)、及び時間拡散変調(TSM)等の、様々な任意に変調された複素信号タイプとすることができ、例えば、ステップ、パルス、2トーン励起、連続波、及び疑似雑音変調とすることができる。
【0063】
図1には別々に示しているが、信号発生器200及び処理デバイス300は、例えば、Xパラメータ技術(Agilent PNA−X)及びパルスエンベロープのオプションを備えたAgilent Technologies社のノンリニアベクトルネットワークアナライザ(NVNA)のコンポーネントとして、又は説明したように試験信号を提供し、対応する計算を実行するように構成又はプログラムされた任意の分析器、コンポーネント、若しくはハードウェアとして一緒に実装することができる。Agilent PNA−Xは、Agilent Technologies, Inc.(カリフォルニア州サンタクララ)から市販されている。Agilent PNA−Xの場合、Agilent PNA−X内の2つの合成器が内部パルス変調器と組み合わされて一組のRF大信号ステップA(t)を生成する。この一組のRF大信号ステップA(t)はマイクロ波コンポーネント100に入力される。
【0064】
次に、更なる代表的な実施形態を説明する。この更なる代表的な実施形態では、広帯域変調の場合のために単純化されたプリディストータを設計することができる。広帯域変調信号の場合、変調振幅の統計量が変動しない場合、動的Xパラメータモデルを単純化することができる。実際には、この仮定は多くの場合に、特に、例えばロングタームエボリューション(LTE)等の最近の通信フォーマットを用いて行うことができる。そのような単純化されたモデルは、広帯域Xパラメータモデルとして特徴付けることができる。動的Xパラメータを単純化するのに用いられる同じ着想を、単純化されたプリディストータを設計するのにも用いることができ、このプリディストータは広帯域プリディストータとして特徴付けることができる。
【0065】
広帯域XパラメータカーネルK(・)によって特徴付けられる増幅器の場合、増幅器の出力包絡線信号Y(t)が以下のように入力信号X(t)に関係付けられることを意味する。
【数36】
式(45)において、p(・)は入力信号振幅の確率密度関数を表す。2次元カーネルK(・)の値は、一組のパルス実験を実行することによって、求めるのが比較的容易である。時点ゼロにおいて振幅A1から振幅A2に切り替わる大信号ステップを増幅器に印加することができる。切替え直後(無限小の正数εに等しい時点)の出力信号の値はK(A2,A1)に等しくなる。特に、入力信号X(t)が上述した大信号ステップに等しい場合、Y(t)は以下のように与えられる。
【数37】
式(46)において、δ(・)はディラックのデルタ分布に等しい。式(45)において用いられるようなカーネルK(・)は、第1の引数として複素数を有することに留意されたい。しかしながら、ステップ実験によって導出されるようなカーネル関数は、正の実数の第1の引数についてしか求められない。測定されたカーネルK(・)は、以下のようにK(・)の特性を用いることによって、複素数の第1の引数に向けて簡単に拡張される。
【数38】
広帯域プリディストータは、この着想に基づいて構築される。
【0066】
プリディストータ自体を、以下のように広帯域Xパラメータモデルとして書くことができる。
【数39】
結果として、2次元カーネルK(・)を知ると、次に、2次元広帯域プリディストーションカーネルKPD(・)は、これらの2つのカスケード接続したものが、利得αを有するほぼ完全な増幅器のようにふるまうように求められなくてはならない。換言すれば、振幅A1から振幅A2に切り替わる大信号入力ステップを印加すると、カスケード接続されたシステムの出力信号は、少なくともステップが印加された直後(無限小時点ε)に振幅レベルαA1と振幅レベルαA2との間で切り替わらなくてはならない。カスケード接続されたシステムのステップの直後の結果としての振幅は、以下のように数学的に計算することができる。
【数40】
【0067】
広帯域プリディストータの場合、
Y(ε)=αA2 (50)
であり、これは、
KPD(A1,A1)=FCW−1(A1) (51)
であることも知られている。なぜなら、これは単に静的プリディストータに対応するためである。式(50)及び式(51)を式(49)に代入することによって、以下のように2次元広帯域プリディストーションカーネルKPD(・)が得られる。
【数41】
振幅値A1及びA2の全範囲について式(52)を解くことによって、2次元広帯域プリディストーションカーネルKPD(・)を完全に知ることになる。以下のように計算を実行するには、2次元カーネルK(・)のみを知ればよいことに留意されたい。
FCW(A1)=K(A1,A1) (53)
【0068】
代表的な実施形態におけるようにカーネルFP(・)及びGP(・)を有する動的Xパラメータモデルを用いて信号をプリディストーションする方法は、以下に示すように、実験的に検証されている。パッケージ化された増幅器、特にMini−Circuits ZFL−11AD+に動的プリディストータ技法を適用した。1750MHzの搬送波周波数において、動的Xパラメータモデルをこの増幅器について抽出し、大信号ステップ、2トーン信号、及び複素変調信号(cdma2000、WCDMA)等の様々な種類の信号を用いて、対応する動的Xパラメータモデルを実験的に検証した。その後、対応する動的プリディストータのカーネルを、上記で説明した方式で計算した。次に、プリディストータを、市販の調和平衡シミュレータであるADS2009に実装した。動的プリディストータの性能を試験するために、増幅器の動的Xパラメータモデルとカスケード接続された動的補償器を用いて幾つかのシミュレーションを実行した。2つのそのようなシミュレーションの結果が図5及び図6に示されている。
【0069】
WCDMAのような特性(5MHzの変調帯域幅及び同様の振幅分布)を有する信号が、増幅器の動的Xパラメータモデルとカスケード接続された動的プリディストータに印加された第1のシミュレーションの結果が図5に示されている。図5と同じ振幅分布を有するが大幅に低減された変調帯域幅(60kHzの変調帯域幅のみ)を有する信号が、増幅器の動的Xパラメータモデルとカスケード接続された動的プリディストータに印加された第2のシミュレーションの結果が図6に示されている。図5及び図6において、入力信号+10dB、プリディストータ出力+10dB、及び増幅器出力を表すトレースが示されている。これらの結果は、プリディストータによって、予期されるようなスペクトル再成長が実質的に除去されることを示している。重要なことに、プリディストータは、大信号ステップ測定値に基づいて完全に計算された。これらの大信号ステップ測定値は、実験的な検証中に増幅器の動的Xパラメータモデルとカスケード接続された動的プリディストータに印加される信号と大きく異なる。これによって本手法のロバスト性が証明される。
【0070】
更なる代表的な実施形態の広帯域変調のために設計された単純化されたプリディストータの実験的な検証を、CREEからの25W GaN MMIC増幅器に対して実行した。まず、パルス測定値を用いて、2GHzの搬送波周波数における広帯域Xパラメータモデルをこのコンポーネントについて実験的に抽出した。この広帯域Xパラメータモデルを、LTE入力信号及びWCDMA入力信号を用いて検証した。次に、抽出された広帯域Xパラメータカーネルを用いて、広帯域プリディストータのカーネルを計算した。広帯域プリディストータの性能を試験するために、増幅器の広帯域Xパラメータモデルとカスケード接続された広帯域プリディストータの幾つかのシミュレーションを実行した。この更なるシミュレーションの結果が図7に示されている。図7において、利得αで増幅されるようなLTE入力信号、代表的な実施形態の広帯域(WB)プリディストータを用いてシミュレートされた増幅器出力、及び代表的な実施形態の連続波(CW)プリディストータを用いてシミュレートされた増幅器出力を表すトレースが示されている。図7に示すように、利得αで増幅されるようなLTE入力信号を表すトレースと、広帯域プリディストータを用いてシミュレートされた増幅器出力を表すトレースとは実質的に同一であり、単純化された広帯域手法のロバスト性を示している。
【0071】
図8は、代表的な実施形態による、図1のシステム10の動作を制御するアルゴリズムを実行するためのコンピュータシステム500を示す機能ブロック図である。コンピュータシステム500は、プログラミング言語変換プロセスの様々なステップを実行することが可能な、PC等の任意のタイプのコンピュータ処理デバイスとすることができる。様々な実施形態において、コンピュータシステム500は、信号発生器200若しくは処理デバイス300、及び/又は別個のコントローラ若しくは他の処理デバイス(図示せず)内に含めることもできるし、これらのデバイスのうちの1つ又は複数の中で分散させることもできる。
【0072】
示される代表的な実施形態では、コンピュータシステム500は、中央処理ユニット(CPU)571と、メモリ572と、バス579と、インターフェース575〜577とを備える。メモリ572は、少なくとも不揮発性読出し専用メモリ(ROM)573と揮発性ランダムアクセスメモリ(RAM)574とを備えるが、メモリ572は、任意の数、タイプ、及び組合せのROM及びRAM、並びに任意の数、タイプ、及び組合せの内部メモリ及び外部メモリとして実装することができることが理解される。メモリ572は、参照テーブル及び/又は他の関連機能を提供することができる。様々な実施形態では、メモリ572には、任意の数、タイプ、及び組合せの、ディスクドライブ、コンパクトディスク(例えばCD−R/CD/RW)、電気的にプログラム可能な読出し専用メモリ(EPROM)、電気的に消去可能かつプログラム可能な読出し専用メモリ(EEPROM)、デジタルビデオディスク(DVD)、ユニバーサルシリアルバス(USB)ドライブ、ディスケット、フロッピー(登録商標)ディスク等の有形コンピュータ可読記憶媒体を含めることができる。さらに、メモリ572は、プログラム命令と、CPU571によって実行された計算の結果とを格納することができる。
【0073】
CPU571は、本明細書において説明される様々な実施形態によるシステム10の制御を含む、1つ又は複数のソフトウェアアルゴリズムを、例えばメモリ572と併せて実行するように構成される。CPU571は、CPU571が様々な機能を実行することを可能にする実行可能なソフトウェアコードを格納する、CPU571独自のメモリ(例えば不揮発性メモリ)を備えることができる。代替的に、実行可能なコードは、メモリ572内の指定されたメモリロケーション内に格納することができる。CPU571は、Microsoft Corporationから入手可能なWindows(登録商標)オペレーティングシステム又はUnix(登録商標)オペレーティングシステム(例えばSun Microsystems, Inc.から入手可能なSolaris(登録商標))等のオペレーティングシステムを実行することができる。
【0074】
一実施形態では、ユーザ及び/又は他のコンピュータは、I/Oインターフェース575を通じて、入力デバイス(複数の場合もあり)585を用いてコンピュータシステム500とインタラクトすることができる。入力デバイス(複数の場合もあり)585には、任意のタイプの入力デバイス、例えば、キーボード、トラックボール、マウス、タッチパッド、又はタッチセンサー式ディスプレイ等を含めることができる。また、コンピュータシステム500によって、ディスプレイインターフェース576を通じてディスプレイ586上に情報を表示することができる。ディスプレイインターフェース576には、例えば任意のタイプのグラフィカルユーザインターフェース(GUI)を含めることができる。
【0075】
コンピュータシステム500は、システム10の様々なコンポーネントと通信するための制御インターフェース577も備えることができる。例えば、様々な実施形態では、コンピュータシステム500は、マイクロ波コンポーネント100と通信して、一組のRF大信号ステップ応答を受信することができ、信号発生器200は、マイクロ波コンポーネント100及び/又は処理デバイス300の試験信号を定義して、上述したように、例えばネットワーク587によって示すような有線LAN又は無線LANを介して入力信号を提供することができる。制御インターフェース577には、例えば、適切な標準プロトコルに従ってアンテナシステム(図示せず)を通じてデータネットワークを介して無線で通信する、受信機と送信機とを備える送受信機(図示せず)を含めることができる。しかしながら、制御インターフェース577には、本教示の範囲から逸脱することなく、任意のタイプのインターフェースを含めることができることが理解される。
【0076】
システム10に示す様々な「部品」は、ソフトウェア制御されたマイクロプロセッサ、配線論理回路、又はそれらの組合せを用いて物理的に実装することができる。一実施形態では、コンピュータシステム500は、信号発生器200及び/又は処理デバイス300の機能を実行することができる。更なる実施形態では、コンピュータシステム500は、信号発生器200及び/又は処理デバイス300の機能を実行することに加えて、マイクロ波コンポーネント100及び動的プリディストータの仮想表現をモデル化又は提供することもできる。この更なる実施形態では、コンピュータシステム500は、一組のRF大信号ステップを生成するか又は他の方法でマイクロ波コンポーネント100の仮想表現に提供することもでき、これらの一組のRF大信号ステップは、それら自体をシミュレートすることができる。ここで、マイクロ波コンポーネント100の仮想表現はその後、プリディストータの動的Xパラメータカーネルの計算のためにRF大信号ステップ応答を提供することができる。このため、コンピュータシステム500は、プログラム命令を用いてシステム10の機能の全て又は一部を実行するように構成することができる。プログラム命令は、任意の数、タイプ、及び組合せの上述した有形コンピュータ可読記憶媒体又は非一時的コンピュータ可読媒体においてコードセグメント又は手順として格納することができる。このため、システム10は仮想的に実装することができる。
【0077】
コンピュータシステム500内に示す様々な「部品」は、ソフトウェア制御されたマイクロプロセッサ、配線論理回路、又はそれらの組合せを用いて物理的に実装することができる。また、部品は説明の目的でコンピュータシステム500において機能的に別にされているが、これらの部品は任意の物理的実装において様々な形で組み合わせることができる。
【0078】
当業者に明らかとなるように、システム10は入力信号をプリディストーションし、それに応じて、入力信号の実質的に歪みのないものを出力する。システム10は、例えば非線形光学現象、並びに、音、振動、衝撃波、及び歪みを含む非線形機械現象等の、他の様々な周波数現象をプリディストーションするのに用いることもできる。この開示に鑑みて、当業者であれば、添付の特許請求の範囲の範囲内に留まりながらこれらの応用形態を実施することができる。
【0079】
当業者に更に明らかとなるように、様々な代表的な実施形態は、マイクロ波コンポーネント100の信号をプリディストーションする方法を提供する。代表的な実施形態では、マイクロ波コンポーネント100は増幅器とすることができる。しかしながら、これは単に例示的なものであり、他のマイクロ波コンポーネント及びシステムの使用が考慮される。マイクロ波コンポーネントには、本教示の範囲から逸脱することなく、トランジスタ、ダイオード、モノリシックマイクロ波集積回路(MMIC)、マルチチップモジュール(MCM)、非線形電子アナログコンポーネント又は回路、及び非線形RFシステム等の他のコンポーネントを含めることができる。プリディストーションに提供される入力信号には、単純な2トーン励起、パルス励起、及びより複雑な変調RF励起、又は、例えば広帯域符号分割多元接続(WCDMA)、ロングタームエボリューション(LTE)、及びマイクロ波アクセス世界的相互運用性(WiMAX)等の通信信号の標準的な広帯域デジタル変調フォーマット等の、任意の変調信号を含めることができる。
【0080】
説明のために例としてのみ、またいかなる限定的な意味でもなく、様々なコンポーネント、材料、構造、及びパラメータが含まれる。本開示に鑑みて、当業者であれば、添付の特許請求の範囲の範囲内に留まりながら、当業者自身の応用形態、並びにこれらの応用形態を実施するのに必要なコンポーネント、材料、構造、及び機器を求める際に本教示を実施することができる。
【0081】
したがって、本発明は、上記で詳述した特定の実施形態例に限定されるべきではない。
【0082】
実施形態例が本明細書で開示されたが、本教示による多くの変形形態が可能であり、また、添付の特許請求の範囲の範囲内に留まることを当業者は認識する。したがって、本発明は、添付の特許請求の範囲の範囲内にあることを除いては制限されない。
【符号の説明】
【0083】
10 システム
100 マイクロ波コンポーネント
200 信号発生器
300 処理デバイス
400 入力デバイス
【背景技術】
【0001】
マイクロ波電力増幅器は、無線電気通信システムにおいて重要なコンポーネントである。これらの増幅器に伴う既知の問題は、これらの増幅器が、通常、変調を有する搬送波である入力信号を大幅に歪ませる可能性があることである。この歪みによって、電気通信チャネルにおいて誤りが生じる。増幅器歪みを除去するか又は最小にする手法は、入力信号をプリディストーションする(predistoring)ことを伴う。この手法によれば、複素包絡線A(t)によって表される入力信号に非線形プリディストータ(predistorter)演算子P[・]が適用される。この結果、プリディストーションされた信号(predistorted signal)P[A(t)]が得られる。プリディストーションされた信号P[A(t)]は増幅器に印加される。増幅器が入力信号としてP[A(t)]を受信したときに、増幅器出力がA(t)の完全に増幅されたもの(amplified version)に等しい場合、P[・]は完全プリディストーション演算子である。プリディストータは、増幅器の非線形歪みを完全に打ち消すように入力信号A(t)を歪ませる。
【0002】
増幅器歪みを除去することは、長期記憶効果又は長期メモリ効果(long term memory effect)の存在に起因して、多くの実際的な事例において困難である。長期記憶効果は、動的に変化する内部バイアス、温度、又はトラップ状態に起因する可能性がある。このため、増幅器の歪み特性は、入力信号の履歴に依拠する。これは、プリディストーション演算子P[・]が単純な静的マップとはならず、入力信号A(t)の履歴を考慮に入れる動的演算子となることを意味する。
【0003】
入力信号X(t)について、増幅器出力信号Y(t)は関数演算子F[・]を用いて以下のように数学的に表すことができる。
Y(・)=F[X(・)] (1)
Y(・)、X(・)、及びP[・]等のシンボル又は用語は、本明細書全体を通じて様々に用いられ、特に、(・)及び[・]の使用は、時間、距離、温度等の1つ又は複数の引数の汎用表現を表す。式(1)において、演算子Fは単にX(t)をY(t)にマッピングする関数ではなく、X(t)の系列全体をY(t)にマッピングする関数演算子である。
【0004】
従来のプリディストータアルゴリズムは、入力信号X(t)の離散サンプリングされたもの(discrete sampled version)に基づいており、これは以下のように表すことができる。
Xn=X(nTS) (2)
式(2)において、下付き文字「n」はサンプリング時刻Tsを「n」倍した時刻におけるサンプリング値を表す。プリディストータアルゴリズムは通常、以下のように与えられるプリディストーションされた信号XPDnに基づく。
【数1】
式(3)において、F(・)は一組の係数β1,β2,...等によってパラメータ化された多次元関数である。係数は、多項式、ニューラルネット、並びに様々な形式の組合せ及び変形の形態をとることができる。係数は試験系列に基づいて計算することができる。ここで、試験入力信号XT(t)が増幅器に印加され、対応する出力信号YT(t)が測定されて、係数が導出される。
【0005】
しかしながら、一組の計算された定数の係数を有する関数F(・)は、試験系列と同じスペクトル特性及び統計特性を有する入力信号に対してのみ良好なプリディストータとして適合する。上述したプリディストータアルゴリズムに基づくプリディストータは、少なくとも試験系列と同じ変調帯域幅及び振幅分布を有する入力信号に対してのみ効果的である。そのような従来のプリディストータの性能は、入力信号の平均電力が変化したとき、又は入力信号が試験系列と大幅に異なる振幅分布を有する異なるタイプの変調を有するとき等、入力信号が試験系列と同じ変調帯域幅及び振幅分布を有しないときに急速に劣化する。上述したような従来のプリディストータは、入力信号の振幅分布及び帯域幅の影響を受けやすい。
【0006】
関数F(・)の複雑度は増大させることができるが、結果として係数の数も増大する。これらの係数は、直接測定することができず、代わりに、実行するのが非常に困難なフィッティング手順によって求めなくてはならない。代替形態として、実際に測定された入力信号系列及び対応する出力信号系列を試験系列として用いて、係数の新たな組を連続して計算することができる。しかしながら、この複雑な非線形フィードバックループ手法は、多くのデジタル部品及びアナログ部品を必要とし、効率的でロバストな方式で実施するのが非常に困難であり、入力信号の特性の突然の変化に応じて正確性を達成するのに大量の時間が必要とされる。
【発明の概要】
【発明が解決しようとする課題】
【0007】
必要とされているのは、広範にわたる入力信号変調帯域幅及び全ての可能性のある入力信号振幅分布について記憶効果又はメモリ効果(memory effect)が存在する中で、非線形成分について信号をプリディストーションする方法であって、その方法は、入力信号電力レベル又は変調方式の影響を受けず、入力信号の全ての可能なピーク対平均比に適しており、プリディストータ係数の連続再計算を必要とするフィードバックを含まず、フィードフォワード手法を用いて実施することができる、方法である。
【課題を解決するための手段】
【0008】
代表的な実施の形態では、非一時的コンピュータ可読媒体が、信号をプリディストーションする、コンピュータによって実行可能なプログラムを格納し、プログラムは、コンピュータに対して、試験信号を生成する生成手順と、試験信号に応答した出力信号からシステムモデルを生成するシステムモデル手順であって、前記システムモデルは、システムの記憶効果を特徴付ける動的部分を含む、システムモデル手順と、システムモデルから逆記憶モデルを生成する記憶モデル手順と、逆記憶モデルを用いて入力信号をプリディストーションするプリディストーション手順と、を実行させる。
【0009】
別の代表的な実施の形態では、方法が、試験信号を生成するステップと、試験信号に応答した出力信号からシステムモデルを生成するステップであって、システムモデルは、システムの記憶効果を特徴付ける動的部分を含む、生成するステップと、システムモデルから逆記憶モデルを生成するステップと、前記逆記憶モデルを用いて入力信号をプリディストーションするステップと、を含む。
【0010】
更なる代表的な実施の形態では、プリディストーションシステムが、入力信号を受信する入力デバイスと、試験信号に応答した出力信号からシステムモデルを生成し、システムモデルから逆記憶モデルを生成するように構成された処理デバイスとを備える。システムモデルは、システムの記憶効果を特徴付ける動的部分を含む。プリディストーションシステムはまた、逆記憶モデルを用いて入力信号をプリディストーションするように構成されたプリディストータを備える。
【0011】
実施形態例は、以下の詳細な説明を添付の図面とともに読むとき、その詳細な説明から最も良好に理解される。適用可能で実際的である場合はどこでも、類似の参照符号は類似の要素を指す。
【図面の簡単な説明】
【0012】
【図1】代表的な実施形態による、入力信号をプリディストーションするシステムを示す単純化されたブロック図である。
【図2】代表的な実施形態による、マイクロ波コンポーネント100に印加される一組のRF大ステップ信号を示すグラフである。
【図3】代表的な実施形態による、一組のRF大ステップ信号に応じてマイクロ波コンポーネント100から出力される一組のRF大信号ステップ応答信号を示すグラフである。
【図4】代表的な実施形態による、対応する信号を含む動的プリディストータの基本原理を示すブロック図である。
【図5】代表的な実施形態による、シミュレーションの結果を示すグラフである。
【図6】代表的な実施形態による、別のシミュレーションの結果を示すグラフである。
【図7】代表的な実施形態による、広帯域変調の更なるシミュレーションの結果を示すグラフである。
【図8】代表的な実施形態による、図1に示すシステム10の動作を制御するアルゴリズムを実行するためのコンピュータシステム500を示す機能ブロック図である。
【発明を実施するための形態】
【0013】
以下の詳細な説明では、限定ではなく説明のために、特定の詳細を開示する実施形態例が、本教示による一実施形態の完全な理解を提供するために説明される。しかし、本明細書で開示される特定の詳細から逸脱する本教示による他の実施形態が、添付の特許請求の範囲の範囲内に留まることが本開示の利益を受ける当業者に明らかであろう。さらに、よく知られている装置及び方法の説明は、実施形態例の説明を不明瞭にしないために省略される場合がある。こうした方法及び装置は、明らかに本教示の範囲内にある。
【0014】
上述したように、従来のプリディストーション技術は、入力信号における変調の帯域幅及び振幅分布の影響を受けやすい。以下で説明される代表的な実施形態では、その全体を引用することにより本明細書の一部を成すものとする、「Method and System For Characterizing, Modeling and Simulating Non-Linear Long Term Memory Effects」と題する2010年5月26日に出願された同時係属出願第12/787,736号に記載されている隠れ変数モデルを用いて増幅器が特徴付けられる。隠れ変数モデルは、長期記憶効果を有する増幅器の歪みを予測する。増幅器の記憶効果を説明する隠れ変数モデル(hidden variables model)のカーネル(kernel)から、一組の逆カーネル(an inverse set of kernels)が計算され、理想的な入力信号に適用され、プリディストーションされた信号が生成される。プリディストーションされた信号は増幅器に印加され、増幅器は、入力信号の、実質的に完全に増幅され、実質的に歪められていないもの(non-distorted version)を出力として提供する。逆演算子は、長期記憶効果によって生じた歪みを実質的に除去し、本質的に、入力信号における変調の帯域幅及び振幅分布の影響を受けない。増幅器が劣化しない限り、一組の逆カーネルは1回のみ計算されればよい。
【0015】
以下の説明は、長期記憶効果を有する増幅器の歪みを予測する増幅器の動的Xパラメータカーネル、及びプリディストーションされた信号を生成するのに用いられるプリディストータの動的Xパラメータカーネルの導出及び実施を提供する。
【0016】
図1は、代表的な実施形態による、入力信号をプリディストーションするシステムを示す簡略化されたブロック図である。図1において、システム10は、処理デバイス300に接続された入力デバイス400と、処理デバイス300及び信号発生器200に接続されたマイクロ波コンポーネント100とを備える。この例では、マイクロ波コンポーネント100は電力増幅器であり、以下で増幅器と呼ばれる場合がある。一方、代替形態におけるマイクロ波コンポーネント100は、本教示の範囲から逸脱することなく、トランジスタ、ダイオード、モノリシックマイクロ波集積回路(MMIC)、マルチチップモジュール(MCM)、非線形電子アナログコンポーネント又は回路、及び非線形RFシステム等の他のタイプのデバイスとすることができる。
【0017】
入力デバイス400には、増幅される入力信号が提供される。一実施形態では、入力デバイス400は、RFフロントエンド及びダウンコンバータを備えることができ、アナログRF信号を処理デバイス300に提供することができる。処理デバイス300は、処理のためにRF信号をデジタル信号に変換する初期段階として、デジタルIQ復調(アナログ/デジタル変換)を含むことができる。別の実施形態では、入力デバイス400は加えて、デジタル信号を直接生成するA/D変換器を備えることができ、デジタル信号を処理デバイス300に提供することができ、それによって処理デバイス300におけるデジタルIQ復調が不要となる。後述するように、処理デバイス300はプリディストーションされた信号を生成しマイクロ波コンポーネント100に提供する。マイクロ波コンポーネント100が増幅器である一実施形態では、マイクロ波コンポーネント100は、プリディストーションされた信号に応じて、入力信号の実質的に完全に増幅されたものを出力する。
【0018】
信号発生器200は、試験信号A(t)を生成し出力するように構成される。試験信号A(t)は、図2に示すような一組の複数のRF大信号ステップとすることができる。信号発生器200は、独立した外的マイクロ波源、又はネットワーク分析器若しくは非線形ネットワーク分析器の内部マイクロ波源、又は刺激として試験信号を提供することが可能な任意のマイクロ波源を含むことができる。
【0019】
初期段階は、マイクロ波コンポーネント100の動作領域電力レベルを定義することである。これはA(t)の範囲を設定する。A(t)は、マイクロ波コンポーネント100の入力に印加される進行波とすることができる。A(t)は、実質的に準完全であり、最小限の雑音しか有せずクリーンである一組の複数のRF大信号ステップを含むものとして生成される。一組の大信号ステップは、初期時刻t=0において第1の初期電力レベルA1から第2の電力レベルA2に切り替わる。図2に示すような一組のRF大信号ステップA(t)の電力レベルA1及びA2の双方が、マイクロ波コンポーネント100の動作範囲全体にわたってステッピングされ、可能性のある入力信号振幅値の範囲をカバーする。一組のRF大信号ステップA(t)内の各ステップの持続時間は、マイクロ波コンポーネント100の長期記憶効果の持続時間よりも大幅に長く、それによって、図3に示すマイクロ波コンポーネント100の出力包絡線B(t)は、出力振幅レベルが切り替わる前に定常状態に達している。一組のRF大信号ステップA(t)は、例えば2次元グリッド上の1組の点として表すことができる。
【0020】
図2に示す一組の複数のRF大信号ステップは、図1において信号発生器200からマイクロ波コンポーネント100に提供される。マイクロ波コンポーネント100はその後、一組のRF大信号ステップA(t)に対する単純な一組のRF大信号ステップ応答からなる出力信号B(t)を提供する。出力信号B(t)を用いて、式(4)によって記述された挙動モデルに基づいてモデルカーネルFCW(・)及びG(・)が導出される。これについて以下で論考する。
【0021】
挙動モデルの導出に関して、この例では増幅器であるマイクロ波コンポーネント100を、入射基本信号である入力信号A(t)と、増幅された信号である出力信号B(t)とを有するものとして考える。説明の目的で、信号は変調した搬送波の複素包絡線表現であるとみなされる。入力信号は、固定周波数を有する変調された搬送波として表すことができると仮定される。モデルは、包絡線情報信号のみを処理するいわゆる低域通過等価モデルとして特徴付けることができる。A(t)とB(t)との間の関係は、以下に示すように式(4)として正確に記述することができる。
【数2】
【0022】
挙動モデルの基本概念又は特性は、B(t)は、非線形関数FCW(・)によって表される静的部分と、非線形関数G(・)の経時的な単純な積分によって表される動的部分との重ね合わせとして書くことができるということである。当業者に明らかであるはずであるように、全体を通じて様々に用いられるような、FCW(・)又はG(・)等のシンボル又は用語、特に(・)の使用は、時間、距離、温度等の1つ又は複数の引数の汎用表現を表す。非線形関数FCW(・)及び積分された関数G(・)のそれぞれは、入力信号A(t)の瞬時振幅の関数である。入力信号の位相に対する依存度は、別個の乗法ベクトルexp(jφ(A(t)))として表される。以降の数学的表記を簡単にするために、以下を理解すべきである。
【数3】
【0023】
当業者に明らかとなるように、この位相依存度は、時間遅延不変の原理によって説明することができる。静的部分は従来のPHDモデルのように動作する。動的部分は、記憶効果を表すので独自性がある。これらは入力信号A(t)の瞬時振幅と、入力信号A(t−u)の過去の値と、過去の値がどれだけ前に生じたか(変数u)との汎用非線形関数の積分効果として説明される。以下に示すように、モデル式(4)は、隠れ変数の表記を用いて導出することができる。
【0024】
モデル式(4)の導出の開始点は、単純な静的PHDモデル式であり、これは式(5)に示すような、単純な圧縮及びAM対PM特性に等しい。
【数4】
式(5)において、関数F(・)は、入力信号の振幅から、対応する出力信号振幅及び位相へのマッピングを表し、ここで、入力信号の位相に対する依存度は、別個の乗法ベクトルとして表される。
【0025】
記憶効果は、1つ又は複数の隠れ変数を用いて導入することができる。着想は、記憶を有するシステムにおいて、入力信号から出力信号へのマッピングは、入力信号振幅のみの関数ではなく、任意の個数N個のアプリオリに知られていない隠れ変数h1(t),h2(t),...,hN(t)の関数でもあることである。これらの変数は、温度、バイアス電圧又はバイアス電流、トラップ状態等の、入力信号から出力信号へのマッピングに影響を及ぼす、コンポーネント内の時変物理量を表す。隠れ変数を導入することによって、式(5)は以下のように式(6)となる。
【数5】
【0026】
ブラックボックスモデル化手法との関連で式(6)を有用にするために、隠れ変数と入力信号との間の関係に関する仮定が必要である。マイクロ波コンポーネントの物理学に関するアプリオリ情報を用いてこの関係を見つけることができるが、代わりに、入力信号と隠れ変数との間の関係に対するブラックボックス仮定は、式(7)に示すように数学的に表すことができる。
【数6】
当業者には明らかとなるように、シンボル∀は全称記号を表し、これは平たく言えば「任意のものを所与として」又は「全てについて」と読み替えることができる。
【0027】
式(7)は、i番目の隠れ変数が、そのインパルス応答ki(・)によって特徴付けられた、入力信号振幅|A(・)|の非線形関数Pi(・)に対する演算を行う線形フィルタ演算によって生成されることを表す。非線形関数Pi(・)は、入力信号がどのように特定の隠れ変数の励起と関係付けられるかを表すソース項として解釈することができ、通常、これは非線形関係である。例えば、非線形関数P1(・)は、入力信号の関数として電力散逸であるとみなすことができ、ここでh1(・)は温度である。インパルス応答ki(・)は、隠れ変数の実際の動力学を表し、ここでk1(・)は例えば熱緩和を表すことができる。1つのみの隠れ変数を有する上記の式の特殊な事例を以下のように提供することができる。
【数7】
ここで、uはダミー積分変数であり、Rは、タイムスケール又はパラメータを表す特定の値である。この上述した特殊な事例では、式(7)は、物理的には、振幅の二乗が、一次線形バイアス回路を通って流れるバイアス電流に関係するという仮定に関係し、これによってバイアス電圧の変動が生じ、これによってPHDモデルが変調される。一方、トラップ効果及び自己発熱等の他の物理的効果も式(7)によって表すことができ、ここで、散逸電力は、A(t)の非線形関数であり、温度変化を引き起こし、この温度変化は散逸電力に線形に関係し、これによってPHDモデルが調節されることを理解すべきである。一方、隠れ変数の実際の動力学を表す非線型関数Pi(・)及びインパルス応答ki(・)は上記の例に限定されず、当業者に明らかであるように、様々な他の例を包含するものと理解されるべきである。すなわち、システムモデルの動的部分は、温度、バイアス電圧、及びトラップ状態のうちの少なくとも1つを含むシステムの変動する動作状態に応じて変化する。
【0028】
その後、式(7)は隠れ変数hi(t)において線形化することができるという仮定に基づいて式(4)とのリンクが作成される。線形化するために、動作点を選択しなくてはならない。以下において、瞬時振幅|A(t)|に対応する隠れ変数の定常状態解の周りの線形化が選択される。換言すれば、入力振幅が全ての未来の時点について一定のままであり、振幅は瞬時入力振幅に等しいと仮定して、システムが達する定常状態解の周りで線形化が選択される。この線形化は、隠れ変数の定常状態解からの隠れ変数のずれは、常に、線形性の原則に違反しない程度に十分に小さいことを暗に仮定する。これらの定常状態解は、入力信号振幅の関数であり、以下でhiCW(・)によって表される。例えば、Xに等しい一定の入力信号振幅が適用される場合、hiCW(X)の値は隠れ変数hi(t)の漸近値に等しい。hiCW(・)の引数は信号振幅であるのに対し、隠れ変数hi(t)の引数は時間であることに留意されたい。関数hiCW(・)は、式(7)において、単にA(t−u)を定数Xによって置き換えることにより、容易に計算される。
【数8】
このとき、式(6)は以下のように書き換えることができる。
【数9】
【0029】
式(11)において、新たな変数Δi(t)は、瞬時入力信号振幅に対応する隠れ変数hi(t)の定常状態解からの隠れ変数のずれを表す。ここで、式(6)は、定常状態からのこれらのずれΔi(t)において線形化することができることが更に仮定される。この結果、以下の式(12)〜(14)が得られる。
【数10】
【0030】
関数Di(・)は、i番目の隠れ変数の変動に対する出力信号の影響度(sensitivity)を表す。例えば、h1(・)が温度を表す場合、D1(・)は、出力信号が温度変化に対してどの程度影響を受けるかを表す。Di(・)は瞬時入力信号振幅の汎用非線形関数であることに留意されたい。例えば、出力信号が、小さな入力信号(温度に依存する小さな信号利得に対応する)の場合には温度変化に対する影響が非常に大きいが、出力が完全に飽和する高い入力信号の場合には影響を全く受けないことも完全に可能である。
【0031】
式(12)の構造において、FCW(・)によって表される静的部分と、隠れ変数インデックス「i」にわたる総和によって表される動的部分とは区別することができる。式(13)を用いてF(・)から導出することができる静的部分は、従来の静的PHDモデルに対応する。FCW(・)において下付きの「CW」が用いられることに留意されたい。なぜなら、この関数は、単一トーン連続波(CW)励起に対する増幅器の応答に対応するためである。式(7)を用いた式(11)におけるhi(t)の置き換え、続いて式(11)を用いた式(12)におけるΔi(t)の置き換えの結果、以下が得られる。
【数11】
【0032】
式(9)を用い、また総和及び積分の順序を変更すると、式(15)は以下のように書き換えることができる。
【数12】
【0033】
通常、隠れ変数が何であるかも、隠れ変数が幾つ存在するか又は隠れ変数がどのようにシステムと相互作用するかも知られていない場合がある。それにもかかわらず、多変量関数G(x,y,u)は常に以下のように定義することができる。
【数13】
式(18)は式(4)と同一である。したがって、式(4)は隠れ変数手法から定義されている。
【0034】
式(17)は、多変量関数G(x,y,u)が任意でないことを明らかにする。なぜなら、以下の関係が常に有効となるためである。
【数14】
この特性は、関数G(・)を実験的に求める際に重要である。
【0035】
挙動モデルは、増幅器に印加された1組のRF大信号ステップに応じて増幅器から出力された単純な1組のRF大信号ステップ応答を測定することから完全に特定することができる。上述したように、入力される一組のRF大信号ステップは、信号が時点ゼロにおいて第1の値から第2の値に切り替わり、それによってマイクロ波コンポーネントへの可能性のある入力RF信号の全体範囲がカバーされるようにすることができる。プロセスは以下のように説明される。
【0036】
ステップ入力信号の印加を検討する。ここで、t<0についてA(t)=A1であり、t≧0についてA(t)=A2である。そのような大信号ステップ応答B(t)の解は、BLS(A1,A2,t)として表され、次に以下によって与えられる。
【数15】
【0037】
式(19)に起因して、式(21)は以下のように書き換えることができる。
【数16】
【0038】
上記の式の両辺において「t」に対して導関数をとることによって、以下が得られる。
【数17】
【0039】
式(4)の固有の因果関係の結果として、関数G(x,y,t)は、「t」の正値についてのみ定義されればよい。式(24)は複数の結果を有する。第1に、式(24)によって、関数G(x,y,t)の直接的な測定が可能になる。関数G(x,y,t)は、入力振幅「y」で開始し、時点0において入力振幅「x」に切り替わるときのステップ応答の導関数の逆をとることによって求められる。第2に、モデルとステップ応答との間に1対1のマッピングが存在する。全ての可能な大信号ステップ応答を測定することができるとすると、測定された大信号ステップ応答を生成することができる単純な非線形動的モデルは、式(4)によって表されるようなモデルである。
【0040】
上記の挙動モデルは、動的Xパラメータモデルと呼ばれる。示すように、モデルカーネル関数FCW(・)及びG(・)は、一組の大信号ステップ応答測定値から特定することができる。これは以下のように行うことができる。ここで、BLS(A1,A2,t)は、時点0においてレベルA1からレベルA2に切り替わる入力ステップに対応する出力信号に等しい。
【数18】
【0041】
したがって、動的xパラメータとの関連で、代表的な実施形態における増幅器の信号をプリディストーションする概念は、以下のように考えることができることになる。式(25)及び式(26)によって表されるような挙動モデルカーネルFCW(・)及びG(・)を有する増幅器を所与とすると、プリディストーション演算子P[・]は、任意の信号A(t)について、増幅器がプリディストーションされた入力信号P[A(t)]に応じて、出力として、信号A(t)の十分完全に増幅されたものを提供するように構築することができる。これは以下のように数学的に表すことができる。
【数19】
【0042】
式(27)において、変数αは利得を表す。換言すれば、演算子P[・]と動的Xパラメータモデルとのカスケード接続は、利得αを有する完全な歪みのない増幅器としてふるまうことになる。
【0043】
次に、代表的な実施形態の動的プリディストータの構築を以下のとおり説明する。まず、式(27)に基づいてP[・]の正確な解を求める直接的な方法は存在しないことに留意されたい。P[・]は動的非線形演算子の逆演算子に対応することが理解されるので、P[・]は動的非線型演算子でもあることになる。逆演算子P[・]自体を動的Xパラメータモデルによって近似することができると仮定することによって、実際的な解が見つかる。このため、逆演算子P[・]は以下によって表すことができる。
【数20】
【0044】
式(28)において、FP(・)及びGP(・)は、逆演算子P[・]の近似に対応する動的Xパラメータカーネルである。このとき、プリディストータの構築は、FCW(・)、G(・)、及びαの値を知ることに基づいてFP(・)及びGP(・)として定式化することができる。結果としてのプリディストータは、動的プリディストータとして特徴付けることができる。
【0045】
大信号ステップ応答と動的Xパラメータカーネルとの間に1対1の対応が存在することを用いて、FP(・)及びGP(・)を計算することができる。これは以下のように行われる。まず、AINV(B1,B2,t)として表記されるいわゆる逆大信号ステップ応答が計算され、ここで、AINV(B1,B2,t)は、結果として振幅レベルB1及びB2間の増幅器切替えの出力において完全なステップを生じ、ゼロ位相を有する特定の入力信号として定義される。逆大信号ステップ応答AINV(B1,B2,t)の計算の詳細については後に説明する。これらの逆大信号ステップ応答AINV(B1,B2,t)は、最大で利得係数αまで、動的プリディストータの大信号ステップ応答に対応する。換言すれば、動的プリディストータのモデルカーネルは、以下のように表すことができる。
【数21】
【0046】
FP(・)及びGP(・)の上記の選択は、図4に示すように、カーネルFP(・)及びGP(・)を有する動的Xパラメータモデル20と、カーネルFCW(・)及びG(・)を有する元の動的Xパラメータモデル30とのカスケード接続の大信号ステップ応答を単に計算することによって、正しいと実証することができる。すなわち、時点ゼロにおけるレベルA1からレベルA2への完全なステップ切替えは、モデルカーネルFP(・)及びGP(・)を有する動的Xパラメータモデル20の入力において適用することができる。構築によって、動的Xパラメータモデル20の出力における信号は、AINV(αA1,αA2,t)に等しい。次に、このプリディストータ出力信号を元の動的Xパラメータモデル30への入力信号として用いることができる。AINV(・)の定義によって、元の動的Xパラメータモデル30の出力信号は、時点ゼロにおいてレベルαA1からαA2に切り替わる完全なステップに等しくなる。換言すれば、カーネルFP(・)及びGP(・)を有する動的Xパラメータモデルと、カーネルFCW(・)及びG(・)を有する動的Xパラメータモデル30とのカスケードは、大信号ステップによって励起されるとき、利得αを有する完全な記憶なし増幅器システムのようにふるまう。このとき、モデルカーネルFP(・)及びGP(・)を有するプリディストータシステムは、任意の変調信号の良好なプリディストータとしてもふるまうことが単に仮定される。
【0047】
次に、上述した逆大信号ステップ応答の計算を以下のように説明する。説明したように、動的XパラメータカーネルFCW(・)及びG(・)を有する増幅器システムの代表的な実施形態の動的プリディストータの動的XパラメータカーネルFP(・)及びGP(・)は、式(29)及び式(30)の適用を通じてAINV(B1,B2,t)から容易に導出することができる。逆大信号ステップ応答AINV(B1,B2,t)の計算は、FCW(・)及びG(・)を知ることから実現することができる。これは、出力信号B(t)が、時点ゼロ(ゼロ位相を有する)において振幅レベルB1から振幅レベルB2に切り替わる完全なステップに等しいことを表すことによって、式(4)に基づいて達成することができる。t<0の場合、システムが連続波(CW)領域にあると仮定することができるので、解は自明であり、したがって以下となる。
【数22】
【0048】
これによって、関数FCW(・)が可逆であることが仮定される。∞に向けたtの極限において、システムがCW領域にあると仮定することもでき、したがって以下となる。
【数23】
【0049】
t>0の場合、B(t)が時点ゼロにおいてレベルB1から振幅レベルB2に切り替わる完全なステップに等しい積分方程式(4)を解く以外に選択肢が存在しない。B1及びB2の或る値を所与とすると、AINV(B1,B2,t)の値は、以下の式の解である時間依存関数X(t)に等しくなる。
【数24】
【0050】
式(33)を解くために、X(t)の振幅は、まず以下を解くことによって計算することができる。
【数25】
【0051】
次に、X(t)の位相は、単に以下によって与えられる。
【数26】
【0052】
式(34)を解く実際的な方法は、離散的時系列によって未知の関数X(t)を表し、離散的総和によって積分演算子を近似することである。これは、サンプリング時刻Tsを選択することによって開始することができる。アルゴリズムが正確であるためには、Tsは最も高速の長期記憶効果と関連付けられた時定数よりも大幅に小さい必要がある。Xiを用いてX(iTs)を表すことによって、式(34)は以下によって近似することができる。
【数27】
【0053】
【数28】
であるので、式(34)は以下のように書くことができる。
【数29】
式(31)に鑑みて、以下であることが理解される。
【数30】
このため、|X0|は以下の非線形式を解くことによって見つけることができる。
【数31】
X0の位相は以下のように与えることができる。
【数32】
次に、|X1|,|X2|,|X3|,...の値は、1,2,...等に等しい「i」について以下を連続して解くことによって見つけることができる。
【数33】
このため、位相は以下のように与えることができる。
【数34】
【0054】
Xiの計算は、「i」より小さいインデックス「k」を有するXkを知ることしか必要としないことに留意されたい。これは、任意の時点において、アルゴリズムが、未知数が1つしかない非線形式を解く必要があることを意味する。未知数間には結合が存在しない。実際には、最も大きな課題は、解を見つけることではなく、単に、「i」の多数の値並びにB1及びB2の複数の値についてアルゴリズムが繰り返されなければならないことである。一方、変数の非結合性(decoupling)は、この問題が、並列処理に非常に適していることを意味する。
【0055】
特定の動作範囲を有する増幅器の場合、動的プリディストータアルゴリズムを特定の搬送波周波数について構築することができる方式は以下のように要約することができる。
【0056】
ステップ1:完全な一組の大信号ステップに対する増幅器の応答を測定する。1つのそのような測定は、大信号ステップ応答測定と呼ばれる。これは、搬送波周波数において、時点ゼロにおいて1つの振幅レベルA1から異なる入力レベルA2まで切り替わる信号を印加することによって行われる。出力信号の対応する複素基本帯域表現は、BLS(A1,A2,t)として表記される。この実験は、増幅器の動作範囲全体がカバーされるように、A1及びA2の多くの異なる結合値について繰り返される。
【0057】
ステップ2:BLS(A1,A2,t)を知ると、式(25)及び式(26)を用いて、増幅器の2つの動的Xパラメータカーネル、すなわち静的部分FCW(・)、及び動的部分G(・)が計算される。この結果、増幅器の動的Xパラメータモデルが生じる。
【0058】
ステップ3:FCW(・)及びG(・)を知ると、FCW(・)及びG(・)を用いて、上記で説明したように、逆大信号ステップ応答関数AINV(B1,B2,t)が計算される。
【0059】
ステップ4:AINV(B1,B2,t)を知ると、式(29)及び式(30)を用いて、プリディストータの動的Xパラメータカーネル、すなわち静的部分FP(・)及び動的部分GP(・)が計算される。原理的には任意に選択することができる最終利得はαである。
【0060】
ステップ5:任意の入力信号A(t)について、対応する動的にプリディストーションされた信号AP(t)は、以下のように計算することができる。
【数35】
増幅器が入力信号AP(t)を用いて励起されるとき、出力信号B(t)は、理想的な増幅信号、すなわちαA(t)に非常に近づく。
【0061】
再び図1を参照すると、マイクロ波コンポーネント100はその後、一組のRF大信号ステップA(t)に対する単純な一組のRF大信号ステップ応答からなる出力信号B(t)を提供する。出力信号の対応する複素基本帯域表現は、BLS(A1,A2,t)として表記される。処理デバイス300は、一組のRF大信号ステップA(t)に応じてマイクロ波コンポーネント100によって生成される一組のRF大信号ステップ応答からなる対応する出力包絡線信号B(t)を測定する。式(25)及び式(26)を測定された大信号ステップ応答BLS(A1,A2,t)に適用することによって、処理デバイス300は、静的部分FCW(・)及び動的部分G(・)である、マイクロ波コンポーネント100の動的Xパラメータカーネルを計算する。静的部分FCW(・)及び動的部分G(・)は、マイクロ波コンポーネント100のシステムモデルとして特徴付けることができる。処理デバイス300は、そのような計算を提供するように構成又はプログラムされた任意のコンポーネント又はハードウェアを備えることができる。図3に示すように、例えば、過渡状態が終了した後のB(t)の定常状態値は、FCW(A2)及びFCW(A1)によって表される静的部分の値に対応する。B(t)の負の時間導関数−dB/dtは、G(A2,A1,t)及びG(A1,A2,t)の値として表される動的部分に対応する。複数のRF大信号ステップ応答のA1及びA2の全体範囲についてこの測定を繰り返すことによって、式(4)によって表されるモデルカーネルFCW(・)及びG(・)を完全に知るようになる。処理デバイス300によって計算されるようなFCW(A2)及びFCW(A1)の値、並びに処理デバイス300によって求められるようなG(A2,A1,t)及びG(A1,A2,t)の負の時間導関数は、表形式で収集することができる。このため、モデルの測定値とパラメータとの間の直接的なマッピングは、代表的な実施形態に従って実現される。このマッピングは、動的部分の3次元モデルとして特徴付けることができ、ここでG(・)の各値は2つの入力振幅及び時点に関係する。
【0062】
図1に示す処理デバイス300は、計算されたモデルカーネルFCW(・)及びG(・)から、次に、上述したように逆大信号ステップ応答関数AINV(B1,B2,t)を計算する。次に、処理デバイス300は、式(29)及び式(30)を用いて、静的部分FP(・)及び動的部分GP(・)である、プリディストーションの動的Xパラメータカーネルを計算する。静的部分FP(・)及び動的部分GP(・)は、マイクロ波コンポーネント100のシステムモデルに対応する逆記憶モデルとして特徴付けることができる。処理デバイス300はその後、式(44)を用いて、入力デバイス400から提供された入力信号A(t)の対応する動的にプリディストーションされた信号AP(t)を計算する。次に、プリディストーションされた信号AP(t)は、マイクロ波コンポーネント100に提供又は接続され、マイクロ波コンポーネント100はその後、入力信号A(t)の実質的に歪んでいないものである増幅信号αA(t)を出力する。代表的な実施形態では、入力信号A(t)は、符号分割多元接続(CDMA)、WCDMA、CDMA2000、ロングタームエボリューション(LTE)、及び時間拡散変調(TSM)等の、様々な任意に変調された複素信号タイプとすることができ、例えば、ステップ、パルス、2トーン励起、連続波、及び疑似雑音変調とすることができる。
【0063】
図1には別々に示しているが、信号発生器200及び処理デバイス300は、例えば、Xパラメータ技術(Agilent PNA−X)及びパルスエンベロープのオプションを備えたAgilent Technologies社のノンリニアベクトルネットワークアナライザ(NVNA)のコンポーネントとして、又は説明したように試験信号を提供し、対応する計算を実行するように構成又はプログラムされた任意の分析器、コンポーネント、若しくはハードウェアとして一緒に実装することができる。Agilent PNA−Xは、Agilent Technologies, Inc.(カリフォルニア州サンタクララ)から市販されている。Agilent PNA−Xの場合、Agilent PNA−X内の2つの合成器が内部パルス変調器と組み合わされて一組のRF大信号ステップA(t)を生成する。この一組のRF大信号ステップA(t)はマイクロ波コンポーネント100に入力される。
【0064】
次に、更なる代表的な実施形態を説明する。この更なる代表的な実施形態では、広帯域変調の場合のために単純化されたプリディストータを設計することができる。広帯域変調信号の場合、変調振幅の統計量が変動しない場合、動的Xパラメータモデルを単純化することができる。実際には、この仮定は多くの場合に、特に、例えばロングタームエボリューション(LTE)等の最近の通信フォーマットを用いて行うことができる。そのような単純化されたモデルは、広帯域Xパラメータモデルとして特徴付けることができる。動的Xパラメータを単純化するのに用いられる同じ着想を、単純化されたプリディストータを設計するのにも用いることができ、このプリディストータは広帯域プリディストータとして特徴付けることができる。
【0065】
広帯域XパラメータカーネルK(・)によって特徴付けられる増幅器の場合、増幅器の出力包絡線信号Y(t)が以下のように入力信号X(t)に関係付けられることを意味する。
【数36】
式(45)において、p(・)は入力信号振幅の確率密度関数を表す。2次元カーネルK(・)の値は、一組のパルス実験を実行することによって、求めるのが比較的容易である。時点ゼロにおいて振幅A1から振幅A2に切り替わる大信号ステップを増幅器に印加することができる。切替え直後(無限小の正数εに等しい時点)の出力信号の値はK(A2,A1)に等しくなる。特に、入力信号X(t)が上述した大信号ステップに等しい場合、Y(t)は以下のように与えられる。
【数37】
式(46)において、δ(・)はディラックのデルタ分布に等しい。式(45)において用いられるようなカーネルK(・)は、第1の引数として複素数を有することに留意されたい。しかしながら、ステップ実験によって導出されるようなカーネル関数は、正の実数の第1の引数についてしか求められない。測定されたカーネルK(・)は、以下のようにK(・)の特性を用いることによって、複素数の第1の引数に向けて簡単に拡張される。
【数38】
広帯域プリディストータは、この着想に基づいて構築される。
【0066】
プリディストータ自体を、以下のように広帯域Xパラメータモデルとして書くことができる。
【数39】
結果として、2次元カーネルK(・)を知ると、次に、2次元広帯域プリディストーションカーネルKPD(・)は、これらの2つのカスケード接続したものが、利得αを有するほぼ完全な増幅器のようにふるまうように求められなくてはならない。換言すれば、振幅A1から振幅A2に切り替わる大信号入力ステップを印加すると、カスケード接続されたシステムの出力信号は、少なくともステップが印加された直後(無限小時点ε)に振幅レベルαA1と振幅レベルαA2との間で切り替わらなくてはならない。カスケード接続されたシステムのステップの直後の結果としての振幅は、以下のように数学的に計算することができる。
【数40】
【0067】
広帯域プリディストータの場合、
Y(ε)=αA2 (50)
であり、これは、
KPD(A1,A1)=FCW−1(A1) (51)
であることも知られている。なぜなら、これは単に静的プリディストータに対応するためである。式(50)及び式(51)を式(49)に代入することによって、以下のように2次元広帯域プリディストーションカーネルKPD(・)が得られる。
【数41】
振幅値A1及びA2の全範囲について式(52)を解くことによって、2次元広帯域プリディストーションカーネルKPD(・)を完全に知ることになる。以下のように計算を実行するには、2次元カーネルK(・)のみを知ればよいことに留意されたい。
FCW(A1)=K(A1,A1) (53)
【0068】
代表的な実施形態におけるようにカーネルFP(・)及びGP(・)を有する動的Xパラメータモデルを用いて信号をプリディストーションする方法は、以下に示すように、実験的に検証されている。パッケージ化された増幅器、特にMini−Circuits ZFL−11AD+に動的プリディストータ技法を適用した。1750MHzの搬送波周波数において、動的Xパラメータモデルをこの増幅器について抽出し、大信号ステップ、2トーン信号、及び複素変調信号(cdma2000、WCDMA)等の様々な種類の信号を用いて、対応する動的Xパラメータモデルを実験的に検証した。その後、対応する動的プリディストータのカーネルを、上記で説明した方式で計算した。次に、プリディストータを、市販の調和平衡シミュレータであるADS2009に実装した。動的プリディストータの性能を試験するために、増幅器の動的Xパラメータモデルとカスケード接続された動的補償器を用いて幾つかのシミュレーションを実行した。2つのそのようなシミュレーションの結果が図5及び図6に示されている。
【0069】
WCDMAのような特性(5MHzの変調帯域幅及び同様の振幅分布)を有する信号が、増幅器の動的Xパラメータモデルとカスケード接続された動的プリディストータに印加された第1のシミュレーションの結果が図5に示されている。図5と同じ振幅分布を有するが大幅に低減された変調帯域幅(60kHzの変調帯域幅のみ)を有する信号が、増幅器の動的Xパラメータモデルとカスケード接続された動的プリディストータに印加された第2のシミュレーションの結果が図6に示されている。図5及び図6において、入力信号+10dB、プリディストータ出力+10dB、及び増幅器出力を表すトレースが示されている。これらの結果は、プリディストータによって、予期されるようなスペクトル再成長が実質的に除去されることを示している。重要なことに、プリディストータは、大信号ステップ測定値に基づいて完全に計算された。これらの大信号ステップ測定値は、実験的な検証中に増幅器の動的Xパラメータモデルとカスケード接続された動的プリディストータに印加される信号と大きく異なる。これによって本手法のロバスト性が証明される。
【0070】
更なる代表的な実施形態の広帯域変調のために設計された単純化されたプリディストータの実験的な検証を、CREEからの25W GaN MMIC増幅器に対して実行した。まず、パルス測定値を用いて、2GHzの搬送波周波数における広帯域Xパラメータモデルをこのコンポーネントについて実験的に抽出した。この広帯域Xパラメータモデルを、LTE入力信号及びWCDMA入力信号を用いて検証した。次に、抽出された広帯域Xパラメータカーネルを用いて、広帯域プリディストータのカーネルを計算した。広帯域プリディストータの性能を試験するために、増幅器の広帯域Xパラメータモデルとカスケード接続された広帯域プリディストータの幾つかのシミュレーションを実行した。この更なるシミュレーションの結果が図7に示されている。図7において、利得αで増幅されるようなLTE入力信号、代表的な実施形態の広帯域(WB)プリディストータを用いてシミュレートされた増幅器出力、及び代表的な実施形態の連続波(CW)プリディストータを用いてシミュレートされた増幅器出力を表すトレースが示されている。図7に示すように、利得αで増幅されるようなLTE入力信号を表すトレースと、広帯域プリディストータを用いてシミュレートされた増幅器出力を表すトレースとは実質的に同一であり、単純化された広帯域手法のロバスト性を示している。
【0071】
図8は、代表的な実施形態による、図1のシステム10の動作を制御するアルゴリズムを実行するためのコンピュータシステム500を示す機能ブロック図である。コンピュータシステム500は、プログラミング言語変換プロセスの様々なステップを実行することが可能な、PC等の任意のタイプのコンピュータ処理デバイスとすることができる。様々な実施形態において、コンピュータシステム500は、信号発生器200若しくは処理デバイス300、及び/又は別個のコントローラ若しくは他の処理デバイス(図示せず)内に含めることもできるし、これらのデバイスのうちの1つ又は複数の中で分散させることもできる。
【0072】
示される代表的な実施形態では、コンピュータシステム500は、中央処理ユニット(CPU)571と、メモリ572と、バス579と、インターフェース575〜577とを備える。メモリ572は、少なくとも不揮発性読出し専用メモリ(ROM)573と揮発性ランダムアクセスメモリ(RAM)574とを備えるが、メモリ572は、任意の数、タイプ、及び組合せのROM及びRAM、並びに任意の数、タイプ、及び組合せの内部メモリ及び外部メモリとして実装することができることが理解される。メモリ572は、参照テーブル及び/又は他の関連機能を提供することができる。様々な実施形態では、メモリ572には、任意の数、タイプ、及び組合せの、ディスクドライブ、コンパクトディスク(例えばCD−R/CD/RW)、電気的にプログラム可能な読出し専用メモリ(EPROM)、電気的に消去可能かつプログラム可能な読出し専用メモリ(EEPROM)、デジタルビデオディスク(DVD)、ユニバーサルシリアルバス(USB)ドライブ、ディスケット、フロッピー(登録商標)ディスク等の有形コンピュータ可読記憶媒体を含めることができる。さらに、メモリ572は、プログラム命令と、CPU571によって実行された計算の結果とを格納することができる。
【0073】
CPU571は、本明細書において説明される様々な実施形態によるシステム10の制御を含む、1つ又は複数のソフトウェアアルゴリズムを、例えばメモリ572と併せて実行するように構成される。CPU571は、CPU571が様々な機能を実行することを可能にする実行可能なソフトウェアコードを格納する、CPU571独自のメモリ(例えば不揮発性メモリ)を備えることができる。代替的に、実行可能なコードは、メモリ572内の指定されたメモリロケーション内に格納することができる。CPU571は、Microsoft Corporationから入手可能なWindows(登録商標)オペレーティングシステム又はUnix(登録商標)オペレーティングシステム(例えばSun Microsystems, Inc.から入手可能なSolaris(登録商標))等のオペレーティングシステムを実行することができる。
【0074】
一実施形態では、ユーザ及び/又は他のコンピュータは、I/Oインターフェース575を通じて、入力デバイス(複数の場合もあり)585を用いてコンピュータシステム500とインタラクトすることができる。入力デバイス(複数の場合もあり)585には、任意のタイプの入力デバイス、例えば、キーボード、トラックボール、マウス、タッチパッド、又はタッチセンサー式ディスプレイ等を含めることができる。また、コンピュータシステム500によって、ディスプレイインターフェース576を通じてディスプレイ586上に情報を表示することができる。ディスプレイインターフェース576には、例えば任意のタイプのグラフィカルユーザインターフェース(GUI)を含めることができる。
【0075】
コンピュータシステム500は、システム10の様々なコンポーネントと通信するための制御インターフェース577も備えることができる。例えば、様々な実施形態では、コンピュータシステム500は、マイクロ波コンポーネント100と通信して、一組のRF大信号ステップ応答を受信することができ、信号発生器200は、マイクロ波コンポーネント100及び/又は処理デバイス300の試験信号を定義して、上述したように、例えばネットワーク587によって示すような有線LAN又は無線LANを介して入力信号を提供することができる。制御インターフェース577には、例えば、適切な標準プロトコルに従ってアンテナシステム(図示せず)を通じてデータネットワークを介して無線で通信する、受信機と送信機とを備える送受信機(図示せず)を含めることができる。しかしながら、制御インターフェース577には、本教示の範囲から逸脱することなく、任意のタイプのインターフェースを含めることができることが理解される。
【0076】
システム10に示す様々な「部品」は、ソフトウェア制御されたマイクロプロセッサ、配線論理回路、又はそれらの組合せを用いて物理的に実装することができる。一実施形態では、コンピュータシステム500は、信号発生器200及び/又は処理デバイス300の機能を実行することができる。更なる実施形態では、コンピュータシステム500は、信号発生器200及び/又は処理デバイス300の機能を実行することに加えて、マイクロ波コンポーネント100及び動的プリディストータの仮想表現をモデル化又は提供することもできる。この更なる実施形態では、コンピュータシステム500は、一組のRF大信号ステップを生成するか又は他の方法でマイクロ波コンポーネント100の仮想表現に提供することもでき、これらの一組のRF大信号ステップは、それら自体をシミュレートすることができる。ここで、マイクロ波コンポーネント100の仮想表現はその後、プリディストータの動的Xパラメータカーネルの計算のためにRF大信号ステップ応答を提供することができる。このため、コンピュータシステム500は、プログラム命令を用いてシステム10の機能の全て又は一部を実行するように構成することができる。プログラム命令は、任意の数、タイプ、及び組合せの上述した有形コンピュータ可読記憶媒体又は非一時的コンピュータ可読媒体においてコードセグメント又は手順として格納することができる。このため、システム10は仮想的に実装することができる。
【0077】
コンピュータシステム500内に示す様々な「部品」は、ソフトウェア制御されたマイクロプロセッサ、配線論理回路、又はそれらの組合せを用いて物理的に実装することができる。また、部品は説明の目的でコンピュータシステム500において機能的に別にされているが、これらの部品は任意の物理的実装において様々な形で組み合わせることができる。
【0078】
当業者に明らかとなるように、システム10は入力信号をプリディストーションし、それに応じて、入力信号の実質的に歪みのないものを出力する。システム10は、例えば非線形光学現象、並びに、音、振動、衝撃波、及び歪みを含む非線形機械現象等の、他の様々な周波数現象をプリディストーションするのに用いることもできる。この開示に鑑みて、当業者であれば、添付の特許請求の範囲の範囲内に留まりながらこれらの応用形態を実施することができる。
【0079】
当業者に更に明らかとなるように、様々な代表的な実施形態は、マイクロ波コンポーネント100の信号をプリディストーションする方法を提供する。代表的な実施形態では、マイクロ波コンポーネント100は増幅器とすることができる。しかしながら、これは単に例示的なものであり、他のマイクロ波コンポーネント及びシステムの使用が考慮される。マイクロ波コンポーネントには、本教示の範囲から逸脱することなく、トランジスタ、ダイオード、モノリシックマイクロ波集積回路(MMIC)、マルチチップモジュール(MCM)、非線形電子アナログコンポーネント又は回路、及び非線形RFシステム等の他のコンポーネントを含めることができる。プリディストーションに提供される入力信号には、単純な2トーン励起、パルス励起、及びより複雑な変調RF励起、又は、例えば広帯域符号分割多元接続(WCDMA)、ロングタームエボリューション(LTE)、及びマイクロ波アクセス世界的相互運用性(WiMAX)等の通信信号の標準的な広帯域デジタル変調フォーマット等の、任意の変調信号を含めることができる。
【0080】
説明のために例としてのみ、またいかなる限定的な意味でもなく、様々なコンポーネント、材料、構造、及びパラメータが含まれる。本開示に鑑みて、当業者であれば、添付の特許請求の範囲の範囲内に留まりながら、当業者自身の応用形態、並びにこれらの応用形態を実施するのに必要なコンポーネント、材料、構造、及び機器を求める際に本教示を実施することができる。
【0081】
したがって、本発明は、上記で詳述した特定の実施形態例に限定されるべきではない。
【0082】
実施形態例が本明細書で開示されたが、本教示による多くの変形形態が可能であり、また、添付の特許請求の範囲の範囲内に留まることを当業者は認識する。したがって、本発明は、添付の特許請求の範囲の範囲内にあることを除いては制限されない。
【符号の説明】
【0083】
10 システム
100 マイクロ波コンポーネント
200 信号発生器
300 処理デバイス
400 入力デバイス
【特許請求の範囲】
【請求項1】
信号をプリディストーションする、コンピュータ(571)によって実行可能なプログラムを格納する非一時的コンピュータ可読媒体(572)であって、前記プログラムは、前記コンピュータに対して、
試験信号を生成する生成手順と、
前記試験信号に応答した出力信号からシステムモデルを生成するシステムモデル手順であって、前記システムモデルは、システム(100)の記憶効果を特徴付ける動的部分を含む、システムモデル手順と、
前記システムモデルから逆記憶モデルを生成する記憶モデル手順と、
前記逆記憶モデルを用いて入力信号をプリディストーションするプリディストーション手順と、
を実行させる、信号をプリディストーションする、コンピュータによって実行可能なプログラムを格納する非一時的コンピュータ可読媒体。
【請求項2】
コンピュータ可読媒体(572)であって、前記プログラムは、前記コンピュータに対して、
前記プリディストーションされた信号を前記システム(100)に印加し、前記入力信号の歪みのないものである信号を生成する、印加手順
を更に実行させる、請求項1に記載のコンピュータ可読媒体。
【請求項3】
コンピュータ可読媒体(572)であって、
前記システム(100)は、前記入力信号の歪みのないものである増幅された信号を生成する増幅器を備える、請求項2に記載のコンピュータ可読媒体。
【請求項4】
コンピュータ可読媒体(572)であって、
前記逆記憶モデルは、前記入力信号の変調帯域幅及び振幅分布の変化の影響を受けない、請求項1に記載のコンピュータ可読媒体。
【請求項5】
コンピュータ可読媒体(572)であって、
前記試験信号は一組の大信号ステップを含む、請求項1に記載のコンピュータ可読媒体。
【請求項6】
コンピュータ可読媒体(572)であって、
前記出力信号は、大信号ステップ応答を含む、請求項5に記載のコンピュータ可読媒体。
【請求項7】
コンピュータ可読媒体(572)であって、
前記一組の大信号ステップは、初期時点において第1の値から第2の値に切り替わり、可能性のある入力信号振幅値の範囲をカバーする、請求項5に記載のコンピュータ可読媒体。
【請求項8】
コンピュータ可読媒体(572)であって、
前記システムモデルの前記動的部分は、温度、バイアス電圧、及びトラップ状態のうちの少なくとも1つを含む前記システム(100)の変動する動作状態に応じて変化する、請求項1に記載のコンピュータ可読媒体。
【請求項9】
方法であって、
試験信号を生成するステップと、
前記試験信号に応答した出力信号からシステムモデルを生成するステップであって、該システムモデルは、システム(100)の記憶効果を特徴付ける動的部分を含む、生成するステップと、
前記システムモデルから逆記憶モデルを生成するステップと、
前記逆記憶モデルを用いて入力信号をプリディストーションするステップと、
を含む、方法。
【請求項10】
前記プリディストーションされた信号を前記システム(100)に印加し、前記入力信号の歪みのないものである信号を生成する、印加するステップを更に含む、請求項9に記載の方法。
【請求項11】
前記システム(100)は、前記入力信号の歪みのないものである増幅された信号を生成する増幅器を備える、請求項10に記載の方法。
【請求項12】
前記逆記憶モデルは、前記入力信号の変調帯域幅及び振幅分布の変化の影響を受けない、請求項9に記載の方法。
【請求項13】
前記試験信号は一組の大信号ステップを含む、請求項9に記載の方法。
【請求項14】
前記出力信号は、大信号ステップ応答を含む、請求項13に記載の方法。
【請求項15】
前記一組の大信号ステップは、初期時点において第1の値から第2の値に切り替わり、可能性のある入力信号振幅値の範囲をカバーする、請求項13に記載の方法。
【請求項16】
前記システムモデルを生成するステップ及び前記逆記憶モデルを生成するステップは、ソフトウェア実装される、請求項9に記載の方法。
【請求項17】
前記システムモデルを生成するステップ及び前記逆記憶モデルを生成するステップは、ハードウェア実装される、請求項9に記載の方法。
【請求項18】
前記システムモデルの前記動的部分は、温度、バイアス電圧、及びトラップ状態のうちの少なくとも1つを含む前記システム(100)の変動する動作状態に応じて変化する、請求項9に記載の方法。
【請求項19】
プリディストーションシステム(10)であって、
入力信号を受信する入力デバイス(400)と、
試験信号に応答した出力信号からシステムモデルを生成し、該システムモデルから逆記憶モデルを生成するように構成された処理デバイス(300)であって、前記システムモデルは、システム(100)の記憶効果を特徴付ける動的部分を含む、処理デバイスと、
前記逆記憶モデルを用いて前記入力信号をプリディストーションするように構成されたプリディストータ(300)と、
を備える、プリディストーションシステム。
【請求項20】
プリディストーションシステム(10)であって、
前記システム(100)は、前記プリディストーションされた信号に応じて、前記入力信号の歪みのないものを出力する、請求項19に記載のプリディストーションシステム。
【請求項21】
プリディストーションシステム(10)であって、
前記システム(100)は、前記入力信号の歪みのないものである増幅された信号を生成する増幅器を備える、
請求項20に記載のプリディストーションシステム。
【請求項22】
プリディストーションシステム(10)であって、
前記逆記憶モデルは、前記入力信号の変調帯域幅及び振幅分布の変化の影響を受けない、請求項19に記載のプリディストーションシステム。
【請求項23】
プリディストーションシステム(10)であって、
前記試験信号は、信号発生器(200)によって提供される一組の大信号ステップを含む、請求項19に記載のプリディストーションシステム。
【請求項24】
プリディストーションシステム(10)であって、
前記システムモデルは逆大信号ステップ応答を含み、前記処理デバイス(300)は該逆大信号ステップ応答から前記逆記憶モデルを生成する、請求項23に記載のプリディストーションシステム。
【請求項25】
プリディストーションシステム(10)であって、
前記一組の大信号ステップは、初期時点において第1の値から第2の値に切り替わり、可能性のある入力信号振幅値の範囲をカバーする、請求項23に記載のプリディストーションシステム。
【請求項26】
プリディストーションシステム(10)であって、
前記システムモデルの前記動的部分は、温度、バイアス電圧、及びトラップ状態のうちの少なくとも1つを含む前記システム(100)の変動する動作状態に応じて変化する、請求項19に記載のプリディストーションシステム。
【請求項1】
信号をプリディストーションする、コンピュータ(571)によって実行可能なプログラムを格納する非一時的コンピュータ可読媒体(572)であって、前記プログラムは、前記コンピュータに対して、
試験信号を生成する生成手順と、
前記試験信号に応答した出力信号からシステムモデルを生成するシステムモデル手順であって、前記システムモデルは、システム(100)の記憶効果を特徴付ける動的部分を含む、システムモデル手順と、
前記システムモデルから逆記憶モデルを生成する記憶モデル手順と、
前記逆記憶モデルを用いて入力信号をプリディストーションするプリディストーション手順と、
を実行させる、信号をプリディストーションする、コンピュータによって実行可能なプログラムを格納する非一時的コンピュータ可読媒体。
【請求項2】
コンピュータ可読媒体(572)であって、前記プログラムは、前記コンピュータに対して、
前記プリディストーションされた信号を前記システム(100)に印加し、前記入力信号の歪みのないものである信号を生成する、印加手順
を更に実行させる、請求項1に記載のコンピュータ可読媒体。
【請求項3】
コンピュータ可読媒体(572)であって、
前記システム(100)は、前記入力信号の歪みのないものである増幅された信号を生成する増幅器を備える、請求項2に記載のコンピュータ可読媒体。
【請求項4】
コンピュータ可読媒体(572)であって、
前記逆記憶モデルは、前記入力信号の変調帯域幅及び振幅分布の変化の影響を受けない、請求項1に記載のコンピュータ可読媒体。
【請求項5】
コンピュータ可読媒体(572)であって、
前記試験信号は一組の大信号ステップを含む、請求項1に記載のコンピュータ可読媒体。
【請求項6】
コンピュータ可読媒体(572)であって、
前記出力信号は、大信号ステップ応答を含む、請求項5に記載のコンピュータ可読媒体。
【請求項7】
コンピュータ可読媒体(572)であって、
前記一組の大信号ステップは、初期時点において第1の値から第2の値に切り替わり、可能性のある入力信号振幅値の範囲をカバーする、請求項5に記載のコンピュータ可読媒体。
【請求項8】
コンピュータ可読媒体(572)であって、
前記システムモデルの前記動的部分は、温度、バイアス電圧、及びトラップ状態のうちの少なくとも1つを含む前記システム(100)の変動する動作状態に応じて変化する、請求項1に記載のコンピュータ可読媒体。
【請求項9】
方法であって、
試験信号を生成するステップと、
前記試験信号に応答した出力信号からシステムモデルを生成するステップであって、該システムモデルは、システム(100)の記憶効果を特徴付ける動的部分を含む、生成するステップと、
前記システムモデルから逆記憶モデルを生成するステップと、
前記逆記憶モデルを用いて入力信号をプリディストーションするステップと、
を含む、方法。
【請求項10】
前記プリディストーションされた信号を前記システム(100)に印加し、前記入力信号の歪みのないものである信号を生成する、印加するステップを更に含む、請求項9に記載の方法。
【請求項11】
前記システム(100)は、前記入力信号の歪みのないものである増幅された信号を生成する増幅器を備える、請求項10に記載の方法。
【請求項12】
前記逆記憶モデルは、前記入力信号の変調帯域幅及び振幅分布の変化の影響を受けない、請求項9に記載の方法。
【請求項13】
前記試験信号は一組の大信号ステップを含む、請求項9に記載の方法。
【請求項14】
前記出力信号は、大信号ステップ応答を含む、請求項13に記載の方法。
【請求項15】
前記一組の大信号ステップは、初期時点において第1の値から第2の値に切り替わり、可能性のある入力信号振幅値の範囲をカバーする、請求項13に記載の方法。
【請求項16】
前記システムモデルを生成するステップ及び前記逆記憶モデルを生成するステップは、ソフトウェア実装される、請求項9に記載の方法。
【請求項17】
前記システムモデルを生成するステップ及び前記逆記憶モデルを生成するステップは、ハードウェア実装される、請求項9に記載の方法。
【請求項18】
前記システムモデルの前記動的部分は、温度、バイアス電圧、及びトラップ状態のうちの少なくとも1つを含む前記システム(100)の変動する動作状態に応じて変化する、請求項9に記載の方法。
【請求項19】
プリディストーションシステム(10)であって、
入力信号を受信する入力デバイス(400)と、
試験信号に応答した出力信号からシステムモデルを生成し、該システムモデルから逆記憶モデルを生成するように構成された処理デバイス(300)であって、前記システムモデルは、システム(100)の記憶効果を特徴付ける動的部分を含む、処理デバイスと、
前記逆記憶モデルを用いて前記入力信号をプリディストーションするように構成されたプリディストータ(300)と、
を備える、プリディストーションシステム。
【請求項20】
プリディストーションシステム(10)であって、
前記システム(100)は、前記プリディストーションされた信号に応じて、前記入力信号の歪みのないものを出力する、請求項19に記載のプリディストーションシステム。
【請求項21】
プリディストーションシステム(10)であって、
前記システム(100)は、前記入力信号の歪みのないものである増幅された信号を生成する増幅器を備える、
請求項20に記載のプリディストーションシステム。
【請求項22】
プリディストーションシステム(10)であって、
前記逆記憶モデルは、前記入力信号の変調帯域幅及び振幅分布の変化の影響を受けない、請求項19に記載のプリディストーションシステム。
【請求項23】
プリディストーションシステム(10)であって、
前記試験信号は、信号発生器(200)によって提供される一組の大信号ステップを含む、請求項19に記載のプリディストーションシステム。
【請求項24】
プリディストーションシステム(10)であって、
前記システムモデルは逆大信号ステップ応答を含み、前記処理デバイス(300)は該逆大信号ステップ応答から前記逆記憶モデルを生成する、請求項23に記載のプリディストーションシステム。
【請求項25】
プリディストーションシステム(10)であって、
前記一組の大信号ステップは、初期時点において第1の値から第2の値に切り替わり、可能性のある入力信号振幅値の範囲をカバーする、請求項23に記載のプリディストーションシステム。
【請求項26】
プリディストーションシステム(10)であって、
前記システムモデルの前記動的部分は、温度、バイアス電圧、及びトラップ状態のうちの少なくとも1つを含む前記システム(100)の変動する動作状態に応じて変化する、請求項19に記載のプリディストーションシステム。
【図1】


【図2】
【図3】

【図4】

【図5】

【図6】

【図7】

【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2013−115818(P2013−115818A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2012−231619(P2012−231619)
【出願日】平成24年10月19日(2012.10.19)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.WCDMA
【出願人】(399117121)アジレント・テクノロジーズ・インク (710)
【氏名又は名称原語表記】AGILENT TECHNOLOGIES, INC.
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成24年10月19日(2012.10.19)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.WCDMA
【出願人】(399117121)アジレント・テクノロジーズ・インク (710)
【氏名又は名称原語表記】AGILENT TECHNOLOGIES, INC.
【Fターム(参考)】
[ Back to top ]