
門型クレーン
【課題】種々の形状の把持対象物を確実に把持することができるハンドユニットを備えた門型クレーンを提供する。
【解決手段】一対の走行レール12に沿って移動可能な左右一対の支持脚2と、両端が前記支持脚2上に支持されているクレーン桁3と、前記クレーン桁3に取り付けられるハンドリング装置4であって、前記クレーン桁3に沿って摺動可能であり、かつ前記クレーン桁3に対して昇降可能に取り付けられる基部材6と、該基部材6の下部に水平に延びて配設され、かつ前記基部材6の軸廻りに回転可能な横桁7と、少なくとも1個が前記横桁7に沿って摺動可能に取り付けられた複数のハンドユニット8であって、把持対象物を把持するための把持部11と、該把持部11が端部に取り付けられたハンド本体10とを有するハンドユニット8とを有するハンドリング装置4と、を備えた。
【解決手段】一対の走行レール12に沿って移動可能な左右一対の支持脚2と、両端が前記支持脚2上に支持されているクレーン桁3と、前記クレーン桁3に取り付けられるハンドリング装置4であって、前記クレーン桁3に沿って摺動可能であり、かつ前記クレーン桁3に対して昇降可能に取り付けられる基部材6と、該基部材6の下部に水平に延びて配設され、かつ前記基部材6の軸廻りに回転可能な横桁7と、少なくとも1個が前記横桁7に沿って摺動可能に取り付けられた複数のハンドユニット8であって、把持対象物を把持するための把持部11と、該把持部11が端部に取り付けられたハンド本体10とを有するハンドユニット8とを有するハンドリング装置4と、を備えた。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、把持対象物を把持して移動させるための門型クレーン(ガントリクレーン)に関するものである。
【背景技術】
【0002】
造船工場においてはブロック建造法が一般的である。ブロックを構成するサブ材は、平板(ベースパネル)上に補強部材(ウェブ材)を立ててこれらを溶接することにより製作されるが、部材の配置、溶接は現在でも主として人手で行われている。しかしながら、このような部材の配置、溶接を人手で行うことは、効率が悪く、手間がかかり面倒である。
このような部材の配材を自動化することを目的とした造船生産ラインの自動配材仮組方法及び装置が特許文献1に開示されている。しかしながら、特許文献1では、把持対象物(主にウェブ材)を把持するためのハンドユニットが1つのみである。把持対象物は、長さが数十cm〜数m以上まで、その大きさがさまざまである。このため、一つのハンドユニットで全ての把持対象物に対応することは困難である。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2001−1979号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明は、上記従来技術を考慮したものであって、種々の形状の把持対象物を確実に把持することができるハンドユニットを備えた門型クレーンを提供することを目的とする。
【課題を解決するための手段】
【0005】
前記目的を達成するため、請求項1の発明では、一対の走行レールに沿って移動可能な左右一対の支持脚と、両端が前記支持脚上に支持されているクレーン桁と、前記クレーン桁に取り付けられるハンドリング装置とを備え、前記ハンドリング装置は、前記クレーン桁に沿って移動可能であり、かつ前記クレーン桁に対して昇降可能に取り付けられる基部材と、該基部材の下部に水平に延びて配設され、かつ前記基部材の軸廻りに回転可能な横桁と、少なくとも1個が前記横桁に沿って移動可能に取り付けられた複数のハンドユニットとを含み、前記ハンドユニットは、前記横桁から下方に延びるハンド本体と、前記ハンド本体の下端部に取り付けられ、把持対象物を把持するための把持部とを有することを特徴とする門型クレーンを提供する。
【0006】
また、請求項2の発明では、一対の走行レールに沿って移動可能な左右一対の支持脚と、両端が前記支持脚上に支持されているクレーン桁と、前記クレーン桁に取り付けられるハンドリング装置とを備え、前記ハンドリング装置は、前記クレーン桁に沿って移動可能であり、かつ前記クレーン桁に対して昇降可能に取り付けられる基部材と、該基部材の下部に水平に延びて配設され、かつ前記基部材の軸廻りに回転可能、かつ伸縮自在な横桁と、少なくとも1個が前記横桁の伸縮に応じて移動可能に取り付けられた複数のハンドユニットとを含み、前記ハンドユニットは、前記横桁から下方に延びるハンド本体と、前記ハンド本体の下端部に取り付けられ、把持対象物を把持するための把持部とを有することを特徴とする門型クレーンを提供する。
【0007】
請求項3の発明では、請求項1又は2の発明において、前記ハンド本体は、その軸廻りに回転可能であることを特徴としている。
請求項4の発明では、請求項1〜3のいずれかの発明において、前記ハンドユニットは、少なくとも1個が上下方向に移動可能であることを特徴としている。
【発明の効果】
【0008】
請求項1の発明によれば、把持対象物を把持するための把持部が複数個、例えば2つのハンドユニットのそれぞれに備わり、さらにこのハンドユニットが横桁に沿って摺動可能に取り付けられるため、ハンドユニットの間隔を調節することにより、種々の長さの把持対象物に対応させてこれらをハンドユニットにより安定して把持することができる。また、横桁は基部材の軸廻りに回転可能であり、さらに基部材はクレーン桁に沿って摺動可能かつ昇降可能であるため、ハンドリング装置は門型クレーン内を広範囲に移動可能となり、把持対象物の最も安定して把持できる場所にハンドリング装置を移動させ、ハンドユニットによりこれを把持することができる。
【0009】
請求項2の発明によれば、把持対象物を把持するための把持部が複数個、例えば2つのハンドユニットのそれぞれに備わり、さらにこのハンドユニットは、横桁の伸縮に応じて横桁の長手方向に沿って移動可能に取り付けられるため、横桁を伸縮させてハンドユニットの間隔を調節することにより、種々の長さの把持対象物に対応させてこれらをハンドユニットにより安定して把持することができる。また、横桁は基部材の軸廻りに回転可能であり、さらに基部材はクレーン桁に沿って摺動可能かつ昇降可能であるため、ハンドリング装置は門型クレーン内を広範囲に移動可能となり、把持対象物の最も安定して把持できる場所にハンドリング装置を移動させ、ハンドユニットによりこれを把持することができる。
【0010】
請求項3の発明によれば、ハンド本体が軸廻りに回転可能であるため、例えば把持対象物が湾曲した板材であって、把持対象物の両端部を把持する場合において、一対のハンドユニットのハンド本体の回転量を調節してこれを把持することができる。
請求項4の発明によれば、ハンドユニットの少なくとも1個が移動可能であるため、いずれかの把持部の高さを異なる位置に調節することができる。したがって、把持対象物の把持部分の高さが異なる場合でも、確実にこれを把持することができる。
【図面の簡単な説明】
【0011】
【図1】本発明に係る門型クレーンの概略正面図である。
【図2】本発明に係る門型クレーンの概略平面図である。
【図3】本発明に係る門型クレーンの概略側面図である。
【図4】ハンドユニットの概略図である。
【図5】湾曲した把持対象物を把持したときの概略断面図である。
【発明を実施するための形態】
【0012】
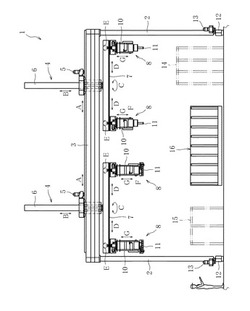
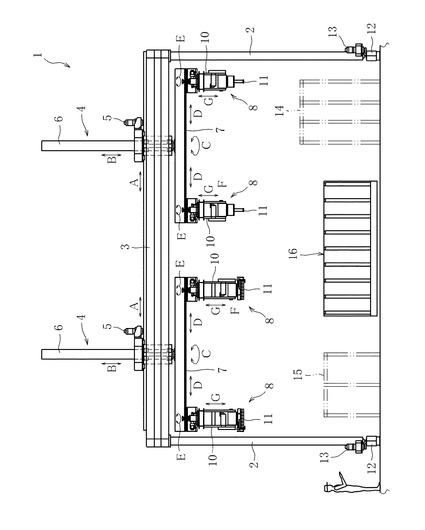
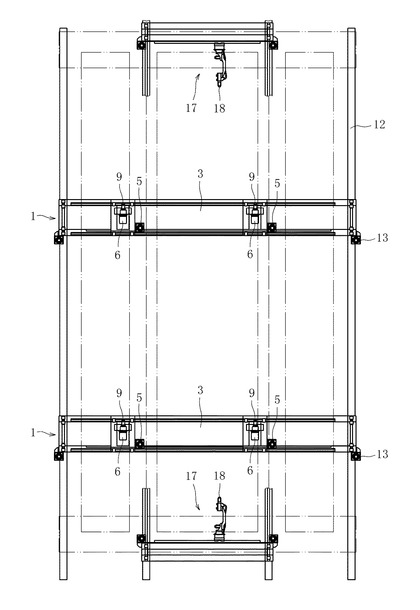
図1は本発明に係る門型クレーンの概略正面図であり、図2は概略平面図、図3は概略側面図である。
本発明に係る門型クレーン1は、一対の支持脚2と、クレーン桁3と、ハンドリング装置4で構成されている。なお、図では2つのハンドリング装置4がクレーン桁3に取り付けられた状態を示しているが、ハンドリング装置4を取り付ける数はこれに限定されるものではない。ハンドリング装置4は、クレーン桁3に沿って矢印A方向に移動可能に取り付けられている。このハンドリング装置4の移動は、モータ5を駆動することにより、例えばハンドリング装置4に備わるガイドローラが回転し、これがクレーン桁3の上部に備わるガイドレールに転がりながらすることにより行われる。ハンドリング装置4は、柱状の基部材6と、横桁7と、ハンドユニット8で構成されている。基部材6は、クレーン桁3に対して矢印B方向に昇降可能に取り付けられている。この基部材6の昇降動作は、モータ9を駆動することにより、公知の昇降機構を用いることにより行われる。
【0013】
横桁7は基部材6の下端に取り付けられ、基部材6を中心として水平方向に延びている。この横桁7は、基部材6の軸廻りに矢印C方向に回転可能に取り付けられている。横桁7の両端部には、把持対象物を把持するための一対のハンドユニット8が取り付けられている。このハンドユニットの少なくとも一方(図では両方)は、横桁7に沿って矢印D方向に摺動可能である。また、ハンドユニット8は、その軸廻りである矢印E方向に回転可能である。なお、ハンドユニット8は横桁7に対して2個に限らず、3個以上備えてもよい。また、ハンドユニット8を横桁7に固定し、横桁7を伸縮可能として、ハンドユニット8を横桁7の長手方向に移動させる構成としてもよい。
【0014】
ハンドユニット8は、横桁7から垂下されたハンド本体10とその端部に備わる把持部11で構成されている。把持部11は、ハンド本体10の軸芯に対して垂直軸廻りである矢印F方向(図4参照)に回転可能である。また、ハンド本体10は、矢印G方向に移動(伸縮)可能である。
このように、矢印A〜Gで示す方向にハンドリング装置4、横桁7、ハンドユニット8、ハンド本体10、把持11を動かすことにより、様々な場所の把持対象物、あるいは種々の形状の把持対象物を把持部11により確実に把持することができる。例えば、ハンドリング装置4を矢印A方向に移動させることにより、把持対象物を門型クレーン1の左右方向に移動させることができる。また、ハンドリング装置4を矢印B方向に移動させることにより、把持対象物を門型クレーン1の上下方向に移動させることができる。さらに、門型クレーン1はその脚部2が走行レール12に沿って矢印H方向に走行するので、把持対象物を門型クレーン1の前後方向に搬送することができる。この走行は、モータ13を駆動させることにより行われる。なお、上記門型クレーン1の各部材の移動、回転は、把持対象物の移動だけではなく、把持対象物を把持するための手段としても同様の効果を得ることができる。
【0015】
また、横桁7を矢印C方向に回転させ、ハンドユニット8を矢印D方向に移動させ、さらに矢印E方向に回転させ、把持部11を矢印F方向に回転させ、ハンド本体10を矢印G方向に伸縮させることにより、種々の形状の把持対象物に合わせて把持部分を調節することができ、確実に安定して把持対象物を把持することができる。すなわち、把持対象物の上縁が斜めに傾斜している場合であっても、隣り合うハンド本体10を異なる長さに伸縮させることにより、その傾斜角度に応じて確実に安定して把持することができる。
【0016】
また、ハンドユニット8が横桁7に一対、すなわち2つ備わるので、大きな把持対象物を把持するときは2つのハンドユニット8を用い、小さな把持対象物を把持するときは1つのハンドユニット8のみを用いて把持すればよいので、把持対象物に応じて適切に把持することができる。1つのハンドユニット8のみで把持する際は、ハンドユニットを矢印D方向に移動させて基部材6の真下に配置することにより、安定して把持することができる。また、ハンドユニット8を上述したように2個以上備えることにより、より大型の把持対象物を安定して把持することができる。
【0017】
また、一対のハンドユニット8において、少なくとも一方のハンド本体10を伸縮可能とすれば、それぞれの把持部11の高さを異なる位置に調節することができる。したがって、把持対象物の把持部分の高さが異なる場合でも、確実にこれを把持することができる。
なお、図1において、14は小型の把持対象物用の受け渡し台である。また、15は大型の把持対象物用の受け渡し台である。また、16は把持対象物がウェブ材とした時のベースパネルを載置するためのピン定盤である。また、図2において、17はベースパネルとウェブ材の仮付溶接用のロボットである。仮付溶接用のロボット17は、ベースパネルとウェブ材の境目にノズル18を向け、これにより両部材を仮溶接する。
【0018】
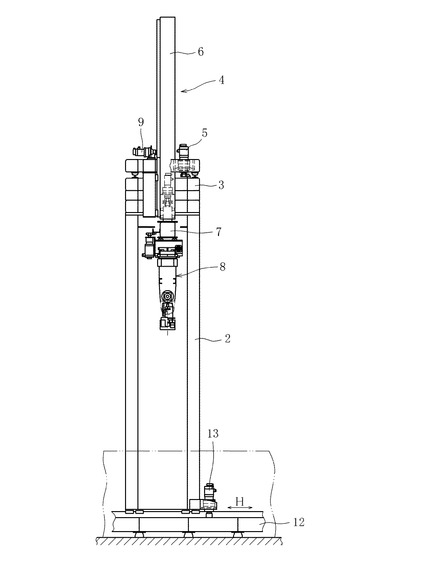
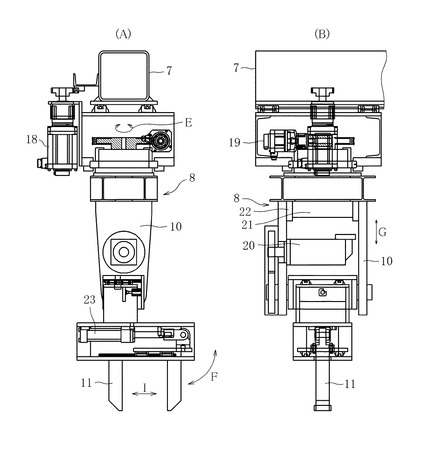
図4はハンドユニットの概略図である。(A)は側面図を示し、(B)は正面図を示している。
図示したように、ハンドユニット8は、横桁7に吊架されている。上述したハンドユニット8が横桁7に沿って移動する際には、モータ18を駆動することにより公知の方法でハンドユニット8を横桁7に沿って摺動させることができる。なお、上述したように、横桁7を伸縮させる構造として、ハンドユニット8を横桁7に固定し、横桁7を伸縮させることにより、ハンドユニット8を横桁7の長手方向に沿って移動させてもよい。ハンド本体10を軸方向である矢印E方向に回転させるには、モータ19を駆動して行うことができる。把持部11を矢印F方向に回転させるには、モータ20を駆動して行うことができる。モータ20を駆動させて把持部11を90°回転させれば、平置きにされた板材を把持することができる。ハンド本体10を矢印G方向に伸縮させるには、伸縮機構21を用いて公知の方法で、例えばガイド部材22に沿ってハンド本体10をスライドさせることにより伸縮させることができる。
【0019】
把持部11は、クランプであり、シリンダ23によりクランプを構成する爪が開閉する(矢印I方向)。なお、把持部11としては、クランプの他、磁石や真空による吸着ハンド等を用いてもよい。
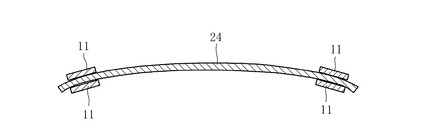
図5は湾曲した把持対象物を把持した時の概略断面図である。
図示したように、上述したハンド本体8をそれぞれ矢印E方向に一方を正回転、他方を逆回転させることにより、把持部11の角度を調節して、把持部11にて湾曲した把持対象物24(ウェブ材)を湾曲面に沿って確実に把持することができる。
【符号の説明】
【0020】
1 門型クレーン
2 支持脚
3 クレーン桁
4 ハンドリング装置
5 モータ
6 基部材
7 横桁
8 ハンドユニット
9 モータ
10 ハンド本体
11 把持部
12 走行レール
13 モータ
14 受け渡し台
15 受け渡し台
16 ピン定盤
17 仮付溶接用ロボット
18 モータ
19 モータ
20 モータ
21 伸縮機構
22 ガイド部材
23 シリンダ
24 把持対象物
【技術分野】
【0001】
本発明は、把持対象物を把持して移動させるための門型クレーン(ガントリクレーン)に関するものである。
【背景技術】
【0002】
造船工場においてはブロック建造法が一般的である。ブロックを構成するサブ材は、平板(ベースパネル)上に補強部材(ウェブ材)を立ててこれらを溶接することにより製作されるが、部材の配置、溶接は現在でも主として人手で行われている。しかしながら、このような部材の配置、溶接を人手で行うことは、効率が悪く、手間がかかり面倒である。
このような部材の配材を自動化することを目的とした造船生産ラインの自動配材仮組方法及び装置が特許文献1に開示されている。しかしながら、特許文献1では、把持対象物(主にウェブ材)を把持するためのハンドユニットが1つのみである。把持対象物は、長さが数十cm〜数m以上まで、その大きさがさまざまである。このため、一つのハンドユニットで全ての把持対象物に対応することは困難である。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2001−1979号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明は、上記従来技術を考慮したものであって、種々の形状の把持対象物を確実に把持することができるハンドユニットを備えた門型クレーンを提供することを目的とする。
【課題を解決するための手段】
【0005】
前記目的を達成するため、請求項1の発明では、一対の走行レールに沿って移動可能な左右一対の支持脚と、両端が前記支持脚上に支持されているクレーン桁と、前記クレーン桁に取り付けられるハンドリング装置とを備え、前記ハンドリング装置は、前記クレーン桁に沿って移動可能であり、かつ前記クレーン桁に対して昇降可能に取り付けられる基部材と、該基部材の下部に水平に延びて配設され、かつ前記基部材の軸廻りに回転可能な横桁と、少なくとも1個が前記横桁に沿って移動可能に取り付けられた複数のハンドユニットとを含み、前記ハンドユニットは、前記横桁から下方に延びるハンド本体と、前記ハンド本体の下端部に取り付けられ、把持対象物を把持するための把持部とを有することを特徴とする門型クレーンを提供する。
【0006】
また、請求項2の発明では、一対の走行レールに沿って移動可能な左右一対の支持脚と、両端が前記支持脚上に支持されているクレーン桁と、前記クレーン桁に取り付けられるハンドリング装置とを備え、前記ハンドリング装置は、前記クレーン桁に沿って移動可能であり、かつ前記クレーン桁に対して昇降可能に取り付けられる基部材と、該基部材の下部に水平に延びて配設され、かつ前記基部材の軸廻りに回転可能、かつ伸縮自在な横桁と、少なくとも1個が前記横桁の伸縮に応じて移動可能に取り付けられた複数のハンドユニットとを含み、前記ハンドユニットは、前記横桁から下方に延びるハンド本体と、前記ハンド本体の下端部に取り付けられ、把持対象物を把持するための把持部とを有することを特徴とする門型クレーンを提供する。
【0007】
請求項3の発明では、請求項1又は2の発明において、前記ハンド本体は、その軸廻りに回転可能であることを特徴としている。
請求項4の発明では、請求項1〜3のいずれかの発明において、前記ハンドユニットは、少なくとも1個が上下方向に移動可能であることを特徴としている。
【発明の効果】
【0008】
請求項1の発明によれば、把持対象物を把持するための把持部が複数個、例えば2つのハンドユニットのそれぞれに備わり、さらにこのハンドユニットが横桁に沿って摺動可能に取り付けられるため、ハンドユニットの間隔を調節することにより、種々の長さの把持対象物に対応させてこれらをハンドユニットにより安定して把持することができる。また、横桁は基部材の軸廻りに回転可能であり、さらに基部材はクレーン桁に沿って摺動可能かつ昇降可能であるため、ハンドリング装置は門型クレーン内を広範囲に移動可能となり、把持対象物の最も安定して把持できる場所にハンドリング装置を移動させ、ハンドユニットによりこれを把持することができる。
【0009】
請求項2の発明によれば、把持対象物を把持するための把持部が複数個、例えば2つのハンドユニットのそれぞれに備わり、さらにこのハンドユニットは、横桁の伸縮に応じて横桁の長手方向に沿って移動可能に取り付けられるため、横桁を伸縮させてハンドユニットの間隔を調節することにより、種々の長さの把持対象物に対応させてこれらをハンドユニットにより安定して把持することができる。また、横桁は基部材の軸廻りに回転可能であり、さらに基部材はクレーン桁に沿って摺動可能かつ昇降可能であるため、ハンドリング装置は門型クレーン内を広範囲に移動可能となり、把持対象物の最も安定して把持できる場所にハンドリング装置を移動させ、ハンドユニットによりこれを把持することができる。
【0010】
請求項3の発明によれば、ハンド本体が軸廻りに回転可能であるため、例えば把持対象物が湾曲した板材であって、把持対象物の両端部を把持する場合において、一対のハンドユニットのハンド本体の回転量を調節してこれを把持することができる。
請求項4の発明によれば、ハンドユニットの少なくとも1個が移動可能であるため、いずれかの把持部の高さを異なる位置に調節することができる。したがって、把持対象物の把持部分の高さが異なる場合でも、確実にこれを把持することができる。
【図面の簡単な説明】
【0011】
【図1】本発明に係る門型クレーンの概略正面図である。
【図2】本発明に係る門型クレーンの概略平面図である。
【図3】本発明に係る門型クレーンの概略側面図である。
【図4】ハンドユニットの概略図である。
【図5】湾曲した把持対象物を把持したときの概略断面図である。
【発明を実施するための形態】
【0012】
図1は本発明に係る門型クレーンの概略正面図であり、図2は概略平面図、図3は概略側面図である。
本発明に係る門型クレーン1は、一対の支持脚2と、クレーン桁3と、ハンドリング装置4で構成されている。なお、図では2つのハンドリング装置4がクレーン桁3に取り付けられた状態を示しているが、ハンドリング装置4を取り付ける数はこれに限定されるものではない。ハンドリング装置4は、クレーン桁3に沿って矢印A方向に移動可能に取り付けられている。このハンドリング装置4の移動は、モータ5を駆動することにより、例えばハンドリング装置4に備わるガイドローラが回転し、これがクレーン桁3の上部に備わるガイドレールに転がりながらすることにより行われる。ハンドリング装置4は、柱状の基部材6と、横桁7と、ハンドユニット8で構成されている。基部材6は、クレーン桁3に対して矢印B方向に昇降可能に取り付けられている。この基部材6の昇降動作は、モータ9を駆動することにより、公知の昇降機構を用いることにより行われる。
【0013】
横桁7は基部材6の下端に取り付けられ、基部材6を中心として水平方向に延びている。この横桁7は、基部材6の軸廻りに矢印C方向に回転可能に取り付けられている。横桁7の両端部には、把持対象物を把持するための一対のハンドユニット8が取り付けられている。このハンドユニットの少なくとも一方(図では両方)は、横桁7に沿って矢印D方向に摺動可能である。また、ハンドユニット8は、その軸廻りである矢印E方向に回転可能である。なお、ハンドユニット8は横桁7に対して2個に限らず、3個以上備えてもよい。また、ハンドユニット8を横桁7に固定し、横桁7を伸縮可能として、ハンドユニット8を横桁7の長手方向に移動させる構成としてもよい。
【0014】
ハンドユニット8は、横桁7から垂下されたハンド本体10とその端部に備わる把持部11で構成されている。把持部11は、ハンド本体10の軸芯に対して垂直軸廻りである矢印F方向(図4参照)に回転可能である。また、ハンド本体10は、矢印G方向に移動(伸縮)可能である。
このように、矢印A〜Gで示す方向にハンドリング装置4、横桁7、ハンドユニット8、ハンド本体10、把持11を動かすことにより、様々な場所の把持対象物、あるいは種々の形状の把持対象物を把持部11により確実に把持することができる。例えば、ハンドリング装置4を矢印A方向に移動させることにより、把持対象物を門型クレーン1の左右方向に移動させることができる。また、ハンドリング装置4を矢印B方向に移動させることにより、把持対象物を門型クレーン1の上下方向に移動させることができる。さらに、門型クレーン1はその脚部2が走行レール12に沿って矢印H方向に走行するので、把持対象物を門型クレーン1の前後方向に搬送することができる。この走行は、モータ13を駆動させることにより行われる。なお、上記門型クレーン1の各部材の移動、回転は、把持対象物の移動だけではなく、把持対象物を把持するための手段としても同様の効果を得ることができる。
【0015】
また、横桁7を矢印C方向に回転させ、ハンドユニット8を矢印D方向に移動させ、さらに矢印E方向に回転させ、把持部11を矢印F方向に回転させ、ハンド本体10を矢印G方向に伸縮させることにより、種々の形状の把持対象物に合わせて把持部分を調節することができ、確実に安定して把持対象物を把持することができる。すなわち、把持対象物の上縁が斜めに傾斜している場合であっても、隣り合うハンド本体10を異なる長さに伸縮させることにより、その傾斜角度に応じて確実に安定して把持することができる。
【0016】
また、ハンドユニット8が横桁7に一対、すなわち2つ備わるので、大きな把持対象物を把持するときは2つのハンドユニット8を用い、小さな把持対象物を把持するときは1つのハンドユニット8のみを用いて把持すればよいので、把持対象物に応じて適切に把持することができる。1つのハンドユニット8のみで把持する際は、ハンドユニットを矢印D方向に移動させて基部材6の真下に配置することにより、安定して把持することができる。また、ハンドユニット8を上述したように2個以上備えることにより、より大型の把持対象物を安定して把持することができる。
【0017】
また、一対のハンドユニット8において、少なくとも一方のハンド本体10を伸縮可能とすれば、それぞれの把持部11の高さを異なる位置に調節することができる。したがって、把持対象物の把持部分の高さが異なる場合でも、確実にこれを把持することができる。
なお、図1において、14は小型の把持対象物用の受け渡し台である。また、15は大型の把持対象物用の受け渡し台である。また、16は把持対象物がウェブ材とした時のベースパネルを載置するためのピン定盤である。また、図2において、17はベースパネルとウェブ材の仮付溶接用のロボットである。仮付溶接用のロボット17は、ベースパネルとウェブ材の境目にノズル18を向け、これにより両部材を仮溶接する。
【0018】
図4はハンドユニットの概略図である。(A)は側面図を示し、(B)は正面図を示している。
図示したように、ハンドユニット8は、横桁7に吊架されている。上述したハンドユニット8が横桁7に沿って移動する際には、モータ18を駆動することにより公知の方法でハンドユニット8を横桁7に沿って摺動させることができる。なお、上述したように、横桁7を伸縮させる構造として、ハンドユニット8を横桁7に固定し、横桁7を伸縮させることにより、ハンドユニット8を横桁7の長手方向に沿って移動させてもよい。ハンド本体10を軸方向である矢印E方向に回転させるには、モータ19を駆動して行うことができる。把持部11を矢印F方向に回転させるには、モータ20を駆動して行うことができる。モータ20を駆動させて把持部11を90°回転させれば、平置きにされた板材を把持することができる。ハンド本体10を矢印G方向に伸縮させるには、伸縮機構21を用いて公知の方法で、例えばガイド部材22に沿ってハンド本体10をスライドさせることにより伸縮させることができる。
【0019】
把持部11は、クランプであり、シリンダ23によりクランプを構成する爪が開閉する(矢印I方向)。なお、把持部11としては、クランプの他、磁石や真空による吸着ハンド等を用いてもよい。
図5は湾曲した把持対象物を把持した時の概略断面図である。
図示したように、上述したハンド本体8をそれぞれ矢印E方向に一方を正回転、他方を逆回転させることにより、把持部11の角度を調節して、把持部11にて湾曲した把持対象物24(ウェブ材)を湾曲面に沿って確実に把持することができる。
【符号の説明】
【0020】
1 門型クレーン
2 支持脚
3 クレーン桁
4 ハンドリング装置
5 モータ
6 基部材
7 横桁
8 ハンドユニット
9 モータ
10 ハンド本体
11 把持部
12 走行レール
13 モータ
14 受け渡し台
15 受け渡し台
16 ピン定盤
17 仮付溶接用ロボット
18 モータ
19 モータ
20 モータ
21 伸縮機構
22 ガイド部材
23 シリンダ
24 把持対象物
【特許請求の範囲】
【請求項1】
一対の走行レールに沿って移動可能な左右一対の支持脚と、
両端が前記支持脚上に支持されているクレーン桁と、
前記クレーン桁に取り付けられるハンドリング装置とを備え、
前記ハンドリング装置は、
前記クレーン桁に沿って移動可能であり、かつ前記クレーン桁に対して昇降可能に取り付けられる基部材と、
該基部材の下部に水平に延びて配設され、かつ前記基部材の軸廻りに回転可能な横桁と、
少なくとも1個が前記横桁に沿って移動可能に取り付けられた複数のハンドユニットとを含み、
前記ハンドユニットは、
前記横桁から下方に延びるハンド本体と、
前記ハンド本体の下端部に取り付けられ、把持対象物を把持するための把持部とを有することを特徴とする門型クレーン。
【請求項2】
一対の走行レールに沿って移動可能な左右一対の支持脚と、
両端が前記支持脚上に支持されているクレーン桁と、
前記クレーン桁に取り付けられるハンドリング装置とを備え、
前記ハンドリング装置は、
前記クレーン桁に沿って移動可能であり、かつ前記クレーン桁に対して昇降可能に取り付けられる基部材と、
該基部材の下部に水平に延びて配設され、かつ前記基部材の軸廻りに回転可能、かつ伸縮自在な横桁と、
少なくとも1個が前記横桁の伸縮に応じて移動可能に取り付けられた複数のハンドユニットとを含み、
前記ハンドユニットは、
前記横桁から下方に延びるハンド本体と、
前記ハンド本体の下端部に取り付けられ、把持対象物を把持するための把持部とを有することを特徴とする門型クレーン。
【請求項3】
前記ハンド本体は、その軸廻りに回転可能であることを特徴とする請求項1又は2に記載の門型クレーン。
【請求項4】
前記ハンドユニットは、少なくとも1個が上下方向に移動可能であることを特徴とする請求項1〜3のいずれかに記載の門型クレーン。
【請求項1】
一対の走行レールに沿って移動可能な左右一対の支持脚と、
両端が前記支持脚上に支持されているクレーン桁と、
前記クレーン桁に取り付けられるハンドリング装置とを備え、
前記ハンドリング装置は、
前記クレーン桁に沿って移動可能であり、かつ前記クレーン桁に対して昇降可能に取り付けられる基部材と、
該基部材の下部に水平に延びて配設され、かつ前記基部材の軸廻りに回転可能な横桁と、
少なくとも1個が前記横桁に沿って移動可能に取り付けられた複数のハンドユニットとを含み、
前記ハンドユニットは、
前記横桁から下方に延びるハンド本体と、
前記ハンド本体の下端部に取り付けられ、把持対象物を把持するための把持部とを有することを特徴とする門型クレーン。
【請求項2】
一対の走行レールに沿って移動可能な左右一対の支持脚と、
両端が前記支持脚上に支持されているクレーン桁と、
前記クレーン桁に取り付けられるハンドリング装置とを備え、
前記ハンドリング装置は、
前記クレーン桁に沿って移動可能であり、かつ前記クレーン桁に対して昇降可能に取り付けられる基部材と、
該基部材の下部に水平に延びて配設され、かつ前記基部材の軸廻りに回転可能、かつ伸縮自在な横桁と、
少なくとも1個が前記横桁の伸縮に応じて移動可能に取り付けられた複数のハンドユニットとを含み、
前記ハンドユニットは、
前記横桁から下方に延びるハンド本体と、
前記ハンド本体の下端部に取り付けられ、把持対象物を把持するための把持部とを有することを特徴とする門型クレーン。
【請求項3】
前記ハンド本体は、その軸廻りに回転可能であることを特徴とする請求項1又は2に記載の門型クレーン。
【請求項4】
前記ハンドユニットは、少なくとも1個が上下方向に移動可能であることを特徴とする請求項1〜3のいずれかに記載の門型クレーン。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2010−265102(P2010−265102A)
【公開日】平成22年11月25日(2010.11.25)
【国際特許分類】
【出願番号】特願2009−119900(P2009−119900)
【出願日】平成21年5月18日(2009.5.18)
【出願人】(000000099)株式会社IHI (5,014)
【出願人】(502422351)株式会社アイ・エイチ・アイ マリンユナイテッド (159)
【Fターム(参考)】
【公開日】平成22年11月25日(2010.11.25)
【国際特許分類】
【出願日】平成21年5月18日(2009.5.18)
【出願人】(000000099)株式会社IHI (5,014)
【出願人】(502422351)株式会社アイ・エイチ・アイ マリンユナイテッド (159)
【Fターム(参考)】
[ Back to top ]