
閉塞睡眠時無呼吸の改良された流量制限検出の方法及び装置
【課題】呼吸気流曲線の吸息部分の時間展開の解析により患者の気道の部分的又は全面的閉塞を検出することに基づく睡眠時無呼吸又は減呼吸を含む呼吸状態を診断及び治療する改良された方法及び装置を提供する。
【解決手段】患者の気道の閉塞に関連づけられた睡眠時無呼吸及び他の障害を治療するため気流信号を使用する呼吸装置において、気流の吸息部分の平坦化を検出する閉塞指数が生成される。平坦化指数は、正常息と閉塞息とを区別するために使用される閉塞指数として役立つ。閉塞指数は、波関数の吸息ピークの異なる扇形における気流の値の比較に基づいており、部分的に閉塞された気道を示すM形又は方形呼吸パターンを識別するのに、特に適している。
【解決手段】患者の気道の閉塞に関連づけられた睡眠時無呼吸及び他の障害を治療するため気流信号を使用する呼吸装置において、気流の吸息部分の平坦化を検出する閉塞指数が生成される。平坦化指数は、正常息と閉塞息とを区別するために使用される閉塞指数として役立つ。閉塞指数は、波関数の吸息ピークの異なる扇形における気流の値の比較に基づいており、部分的に閉塞された気道を示すM形又は方形呼吸パターンを識別するのに、特に適している。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、睡眠時無呼吸又は減呼吸を含む呼吸状態を診断及び治療する改良された方法及び装置に関する。具体的には、本発明は、呼吸気流曲線の吸息部分の時間展開の解析に基づき、患者の気道の部分的又は全面的閉塞を検出することに関する。本発明は、更に、CPAP人工呼吸装置によって適用される治療圧力を調節する装置に関する。
【背景技術】
【0002】
閉塞睡眠時無呼吸(OSA)、即ち、無呼吸、減呼吸、及び猛烈ないびきを含む症状は、可能性として心臓疾患型を含む重大な健康問題をもたらす睡眠中断を引き起す。OSAは、人の気道通路部分の虚脱によって引き起こされる。OSAに選択される治療は、患者の気道を開いたままに保つ持続的気道陽圧法(CPAP)の施術である。通常、圧力範囲4〜20cm H2Oにある空気がモータ駆動送風機によって供給される。送風機の出力は空気配送機器を通過し、患者の気道へ密閉的に係合する。マスク、気管切開チューブ、気管内チューブ、鼻枕、又は他の適切な機器が使用されてもよい。空気配送機器に隣接した配送管の中に排気口が設けられる。二層CPAPと呼ばれるCPAP機器は、吸息及び呼息の息サイクルを感知し、吸い込み及び吐き出しの間に異なる正の圧力レベルを提供するものがある。幾つかの自己滴定CPAP機器は、OSAを解消する最小圧力を選択することによって、個々の患者について適切な圧力レベルを決定するように設計される。そのような機器において、いつOSAが存在するかを決定するために呼吸パラメータのパターンが監視され、適切なパターンが検出されると、CPAP圧力が上げられて増加した気道圧力が提供され、理想的には、閉塞エピソード及び他の形態の息障害の生起が覆される。そのような機器は、米国特許第5,148,802号及び5,245,995号で説明されている。
【0003】
典型的には、OSAを患っている人は、睡眠検査室で診断及び治療される。睡眠検査室では、最初の夜間睡眠期間中に不快の存在が確認され、2番目の夜間睡眠期間中に適切な治療圧力が決定される。生じる1つの問題は、人が異なる段階の睡眠を経るにつれて、適切な圧力が夜間中に変動することである。したがって、OSAの存在を決定し、圧力レベルを最適圧力へ修正することのできる簡単な装置を、患者自身の家庭で使用する必要があると長い間思われてきた。時間の関数としての気流曲線の形状解析からOSAの存在を決定するため、幾つかの試行が行われたが成功はまちまちであった。
【0004】
閉塞睡眠時無呼吸における上方気道圧力・流量関係の監視は、Smith et al.,1988,J.Appl Physiol.64:789−795で説明されている。この論文の図1は、増加する鼻圧力の変動レベルにおけるポリグラフ睡眠記録を示す。吸息容量流量は或る息で安定水準に達し、これは気流制限の存在を示唆することが特筆された。マスク圧力又は食道内の圧力に対する中間吸息気流を描くことによって、圧力・流量曲線が構築された。次に、平均中間吸息流量に対する鼻圧力の圧力・流量図表が最小二乗線形回帰によって当て嵌められ、虚脱可能場所の上流抵抗が計算された。
【0005】
上方気道圧力・流量関係への正の鼻圧力の効果は、Schwartz et al.,1989,J.Appl Physiol.66:1626−1634で説明されている。この論文の図4は、圧力・流量の記録が低圧力レベルで安定水準に達すること示す。更に、圧力が増加されたとき、流量は安定水準に達しなかったことが示された。
【0006】
米国特許第5,335,654号(Rapoport)は、OSAを患っている患者について気流対時間曲線へのCPAPの効果を示す。Rapoportの図1〜図5は、圧力が2cm H2Oの階段で10cm H2Oから2cm H2Oへ低減されるにつれて、気流対時間の曲線は、ほとんど滑らかな正弦パターンから、初期及び終期に流量スパイクを有して曲線の吸息部分が平坦化されたパターンへ変化することを示す。2cm H2Oにおいて、曲線は、いわゆるM形(即ち、中間に脈動波を有する)を展開し、更に平坦化された中間領域の各々の端に行き過ぎ(即ち、ピーク)を展開した。閉塞を示す流量形状を特性化する試みの中で、Rapoportは流量制限及び/又は部分閉塞パターンを示すと称される幾つかの指数を列挙している。これらの指数の中には、(1)流量信号の導関数がゼロであること、(2)延長された区間について流量信号のピーク間の第2の導関数がゼロであること、(3)中間吸息流量に対する早期吸息流量の比が1より小さいか等しいこと、が含まれる。この特許は、更に、閉塞の指標と称される事象を列挙している。即ち、(1)ピーク吸息流量をピーク呼息流量へ接続する線の傾斜が低減すること、(2)流量信号の上向き又は下向き行程(dV/dt)が急峻であること、及び(3)呼息流量に対する吸息流量の比が0.5を超えることである。
【0007】
CPAP治療の管理に関しては、閉塞を示す異常息パターンを感知及び検出する様々な手法が公知である。例えば、米国特許第5,245,995号(Sullivan et al.)は、睡眠中の吸息及び呼息圧力を測定することによって、いびき及び異常息パターンを検出し、閉塞前エピソード又は他の形態の息障害の早期表示を導く方法を説明している。具体的には、呼吸パラメータのパターンが監視され、既定のパターンが検出されると、CPAP圧力が上げられて増加気道圧力が提供され、理想的には、閉塞エピソード及び他の形態の息障害の生起が防止される。
【0008】
米国特許第5,645,053号(Remmers)は、平坦度指数の計算を説明する。この場合、平坦度とは、平均気流からの観察気流の相対的偏差であると定義される。Remmersにおいて、気流の個々の値は、吸息期間の40%と80%との間で取得される。吸息流量の個々の値から、平均値が計算及び減じられる。個々の差は二乗され、観察総数マイナス1によって割られる。この結果の平方根は、相対変分を決定するために使用される。相対変分は平均吸息気流によって割られ、当該息について相対変分又は変分係数が与えられる。
【0009】
米国特許第5,704,345号(Berthon−Jones)は、患者の監視された呼吸気流の吸息部分の平坦化をパラメータ化する2つの閉塞指数値を計算することによって、患者の気道の部分閉塞を検出する方法を開示する。次に、いずれかの閉塞指数が閾値と比較される。第1の形状因子は、息サイクルの吸息気流の中間部分の平均と吸息気流の平均との比を包含する。
【数1】

ここで、fs(t)は患者吸息気流の標本であり、Mは
【数2】
によって与えられる吸息気流の平均である。
【0010】
第2の形状因子は、次式に従って、吸息気流の中間部分のルート平均平方偏差と平均吸息気流との比を包含する。
【数3】
【0011】
米国特許第6,814,073号(Wickham)は、吸息気流に基づいて或る形態の閉塞を検出する方法及び装置を開示する。この方法において、中間吸息に対応する吸息気流標本が同定される。1つの実施形態において、吸息気流標本が、閾値レベル、例えば、平均気流よりも小さいか大きいかに基づいて、加重因子が適用される。他の実施形態では、息における標本の時間位置に基づいて、異なる加重因子が標本へ適用される。吸息中の或る事象に先行して取られた標本、例えば、吸息の中間点に先立つ標本は、事象に後続する標本よりも低い加重因子を割り当てられる。次に、対応する加重因子を有するこれらの標本を使用して、閉塞指数が計算される。
【発明の概要】
【発明が解決しようとする課題】
【0012】
これらの開示された全ての手法は、或る型の流量パターン、特に、M波パターンにおける流量制限を検出することはできない。更に一般的には、先導又は遅延する行き過ぎを呈示す吸気パターンにおける流量制限が適切に検出されない。検出可能度は、2つの因子、即ち、(1)行き過ぎが吸息気流の中間部分にわたる範囲、及び(2)行き過ぎの大きさ、に依存する。もし行き過ぎの大きさが比較的に小さく、中間吸息の大きな部分に広がらず、吸息気流の後の半分に存在しなければ、Wickhamによって呈示された解決法は満足に働く。しかしながら、Wickham方法からの平坦化指数は、時には、Berthon−Jonesによって開示された方法からの指数ほど正確ではない。本発明の1つの態様は、米国特許第5,704,345号(Berthon−Jones)で言及されたアルゴリズムを単純化することである。この米国特許の開示は、参照して組み入れられる。こうして、本発明の目的は、言及された制限、特に、行き過ぎを有するM波パターンが存在するときに流量制限を検出できる方法を呈示することである。
【0013】
従来技術によって説明された流量制限検出/推定手法は、更に、ディジタル処理能力及び要求される流量検出正確度の点で費用が高い。したがって、低コストの電子/ソフトウェア・プラットフォームにおける手法の利用性が制限される。したがって、本発明の他の目的は、アルゴリズムを単純化して、低価格帯の電子及びソフトウェア・プラットフォームがアルゴリズムを受け入れやすくすることである。
【課題を解決するための手段】
【0014】
本発明は、吸息気流の平坦化に基づいて、呼吸閉塞の幾つかの形態を検出する改良方法及び装置に関連する。
【0015】
本発明の1つの態様は、患者の気道の部分閉塞を検出する方法である。この方法は、患者からの呼吸気流を測定するステップと、気流の吸息部分を検出するステップと、吸息部分を整形して呼息休止を除去するステップと、派生物(offshoot)の効果を正規化するステップと、吸息流量を参照値へ尺度変更するステップと、吸息気流の中心部分の平均偏差を計算するステップと、平均偏差から平坦化指数を計算するステップと、移動平均フィルタを用いて平坦化指数をフィルタリングするステップとを備える。
【0016】
部分閉塞を検出する方法に関しては、行き過ぎ(overshoot)の正規化補正が行われる。正規化補正が行われない行き過ぎは、吸息気流の円形推定を誇張する。
【0017】
本発明の実施形態において、行き過ぎの正規化は、吸息気流の中心部分の外側にあって吸息気流の中心部分の平均値を超過する気流値を打ち切ることによって達成される。
【0018】
本発明の他の実施形態では、吸息気流波を複数の部分へ分割し、各々の部分について平均振幅を計算し、平均振幅を解析して行き過ぎの存在を決定し、もし行き過ぎが示されたならば、平坦化を低として取り扱うことによって、行き過ぎが評価される。
【0019】
本発明の更なる実施形態において、最大平坦度の探求は、吸息波形の中間部分の各々の可能な標本について平坦化指数の集合を計算し、吸息波形の平坦化指数を、計算された指数の最小値とすることによって実行される。
【0020】
こうして、本発明の態様は、ピーク流量の位置が吸息流量曲線の中心から外れる範囲によって、患者の息における流量制限の範囲を推定することである。
【0021】
本発明の更なる態様は、息の異なる部分の相対平均振幅が、正常な息によって示されるパターンから外れる範囲によって、流量制限を推定することである。
【0022】
本発明の更なる態様は、最大平坦度を示す息部分を探求することによって、流量制限の範囲を推定する方法を提供することである。
【0023】
本発明の目的は、患者の部分的又は全体的気道閉塞が、患者の気道の部分閉塞を検出する方法により呼吸気流を解析することによって検出される装置を提供することである。前記方法が、患者からの呼吸気流を測定するステップと、この気流の吸息部分を検出するステップと、吸息部分を整形して呼息休止を除去するステップと、行き過ぎの効果を正規化するステップと、吸息流量を参照値へ尺度変更するステップと、吸息気流の中心部分の平均偏差を計算するステップと、平均偏差から平坦化指数を計算するステップと、移動平均フィルタを用いて平坦化指数をフィルタリングするステップとを備える。
【0024】
更なる目的は、追加のコンポーネントを使用することなく、又は、既存の呼吸装置の構造へ実質的な変更を施すことなく、気道閉塞を検出する改良アルゴリズムが実現される装置を提供することである。
【0025】
したがって、患者の呼吸気流が継続的に監視され、吸息に関連づけられた呼吸気流部分が同定及び標本化される呼吸装置が提供される。
【0026】
1つの態様において、本発明は呼吸装置に関連する。この呼吸装置は、加圧されて呼吸可能な空気を患者へ選択的に提供するようになっている空気源と、患者からの呼吸気流を感知し、気流を示す気流信号を生成する流量検出機器と、患者の気道の部分閉塞を検出する方法であって、患者からの呼吸気流を測定するステップと、この気流の吸息部分を検出するステップと、吸息部分を整形して呼息休止を除去するステップと、派生物の効果を正規化するステップと、吸息流量を参照値へ尺度変更するステップと、吸息気流の中心部分の平均偏差を計算するステップと、平均偏差から平坦化指数を計算するステップと、移動平均フィルタを用いて平坦化指数をフィルタリングするステップを含む方法を実現し、前記流量センサへ結合された閉塞検出器と、及び圧力センサ等価物へ接続された圧力コントローラとを含む。この圧力コントローラは、空気源の動作を制御し、閉塞信号を受け取り、閉塞信号に応答して空気源の動作を変更するように、物理的又は論理的に配列される。流量検出機器の用語は、流量センサ又は代替の流量検出機器又はアルゴリズム、例えば、モータ電流から流量を決定するものを含む一般的な用語であることを意図される。
【0027】
本発明の他の態様は、睡眠障害を有する患者を監視及び/又は治療する装置に関係する。この装置は、患者の呼吸を感知し、対応する流量信号を生成する流量検出機器と、及び流量検出機器へ結合され、患者の気道の部分閉塞を検出する方法を実現するようになっている閉塞検出器とを含む。前記方法が、患者からの呼吸気流を測定するステップと、この気流の吸息部分を検出するステップと、吸息部分を整形して呼息休止を除去するステップと、派生物の効果を正規化するステップと、吸息流量を参照値へ尺度変更するステップと、吸息気流の中心部分の平均偏差を計算するステップと、平均偏差から平坦化指数を計算するステップと、移動平均フィルタを用いて平坦化指数をフィルタリングするステップを備え、閉塞検出器は、平坦化指数に基づいて気道閉塞を示す信号を生成する信号生成器を含む。
【0028】
本発明の更なる態様は、睡眠障害を有する患者を治療する装置に関係する。この装置は、マスク、このマスクを介して、加圧されて呼吸可能な空気を患者へ選択的に供給する気体源と、気流を感知し、呼吸を示す流量信号を生成する流量検出機器と、流量検出機器へ結合され、患者の気道の部分閉塞を検出する方法であって、患者からの呼吸気流を測定するステップと、この気流の吸息部分を検出するステップと、吸息部分を整形して呼息休止を除去するステップと、派生物の効果を正規化するステップと、吸息流量を参照値へ尺度変更するステップと、吸息気流の中心部分の平均偏差を計算するステップと、平均偏差から平坦化指数を計算するステップと、移動平均フィルタを用いて平坦化指数をフィルタリングするステップを含む方法を実現するようになっている閉塞検出器と、閉塞信号を受け取り、応答して気体源を活性化する指令を生成するコントローラとを備える。
【0029】
本発明の他の態様は、患者の気道の中の閉塞を検出する方法に関係する。この方法は、患者の気流を測定するステップと、前記気流の所定の区分を検出するステップと、患者の気道の部分閉塞を検出する方法であって、患者からの呼吸気流を測定する工程と、この気流の吸息部分を検出する工程と、吸息部分を整形して呼息休止を除去する工程と、派生物の効果を正規化する工程と、吸息流量を参照値へ尺度変更する工程と、吸息気流の中心部分の平均偏差を計算する工程と、平均偏差から平坦化指数を計算する工程と、移動平均フィルタを用いて平坦化指数をフィルタリングする工程を備える方法を実現するステップを含む。
【図面の簡単な説明】
【0030】
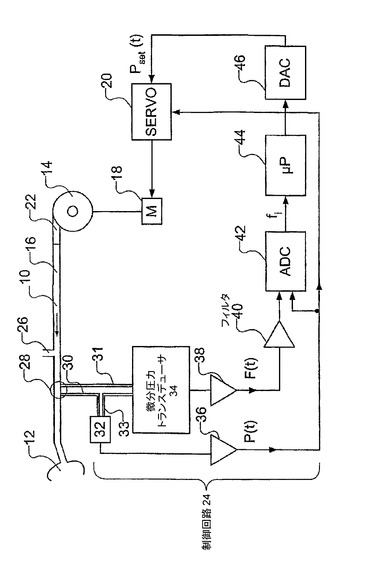
【図1】本発明に従って構築された呼吸装置のブロック図を示す。
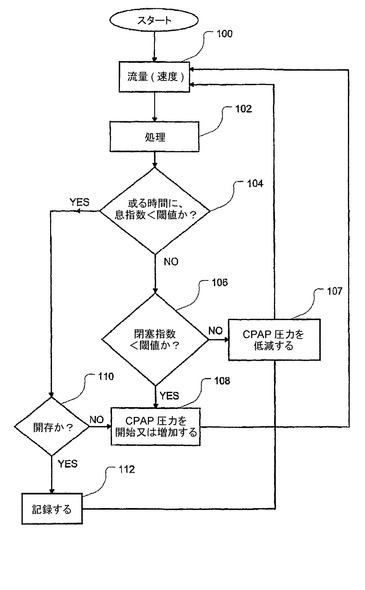
【図2】図1の装置の動作を図解するフローチャートを示す。
【図3】健康人及び部分気道閉塞を有する人について、典型的な呼吸信号の吸息段階を示す。
【図4】正常な息サイクルを示す。
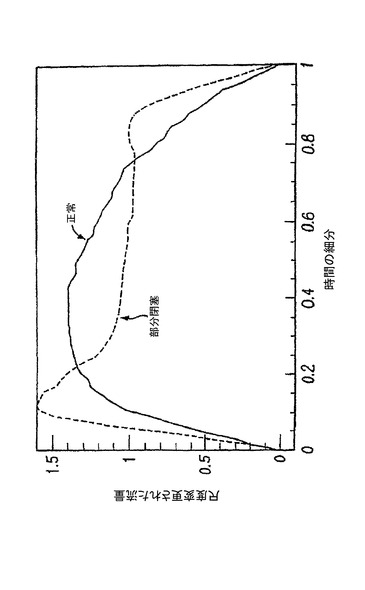
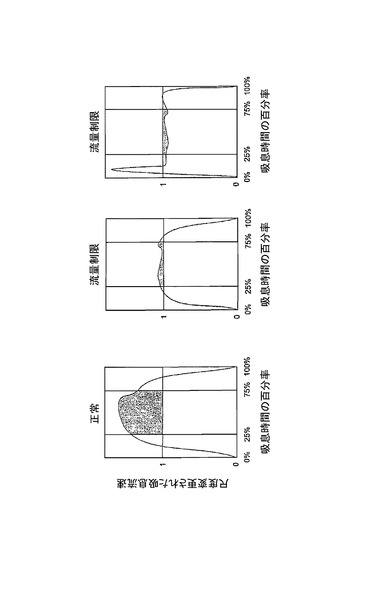
【図5】正常及び流量制限の流量対時間曲線を示し、左方のパネルは正常曲線を示し、右方のパネルは流量制限曲線を示す。
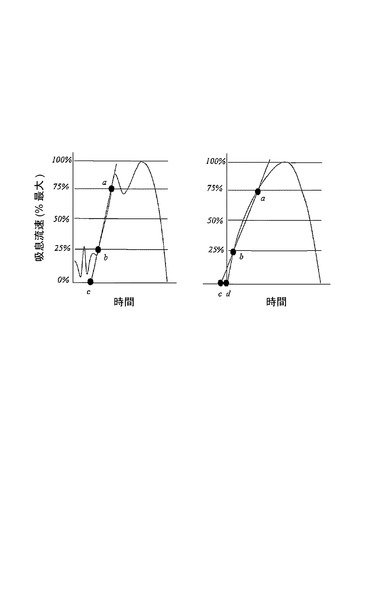
【図6】2つの可能な息について、時間に対する吸息流量を示す。
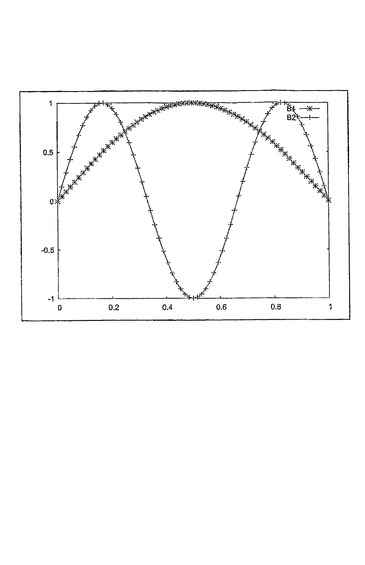
【図7】M形指数の計算に使用される基底ベクトルのグラフである。
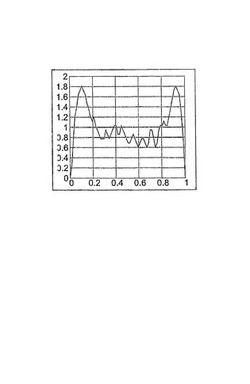
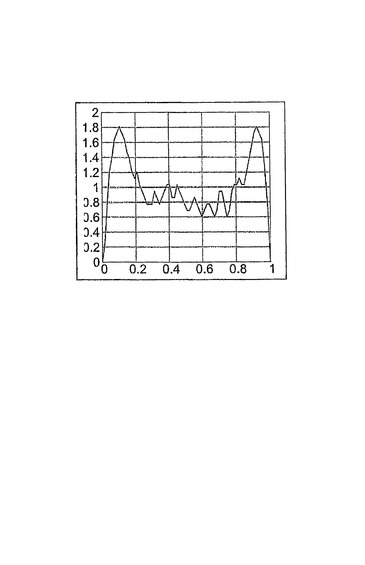
【図8】典型的なM形息のグラフである。
【発明を実施するための形態】
【0031】
装置及び方法論
図1は、本発明に従って構築された例示的呼吸装置10を示す。呼吸装置10は、可撓管16によって送風機14へ接続されたマスク12を含む。マスク12は、患者へ嵌められ、鼻マスク又はフェースマスクであってもよい。送風機14は空気出口22を有し、空気出口22は、サーボコントローラ20からの制御信号に従って、モータ18によって駆動される。この配列によって、呼吸装置10は加圧された空気(又は、図示されない源から酸素を強化された空気)を配送することができる。加圧された空気は、管16によってマスク12へ配送される。管16は狭い排気口26を設けられ、患者によって吐き出された空気は排気口26を介して追い出される。
【0032】
所定の規準を使用してサーボコントローラ20及びモータ18の動作を制御し、それによって装置10の動作モードを規定するため、制御回路24が使用される。好ましくは、本発明によれば、制御回路24は、装置10を動作させてCPAPを患者へ提供するように適応される。
【0033】
制御回路24は流量限定要素28を含む。管30及び31は、それぞれ限定要素28の異なる側からマスク圧力トランスデューサ32及び微分圧力トランスデューサ34へ導かれる。マスク圧力トランスデューサ32は、更に、他の管33を介して微分圧力トランスデューサ34へ接続される。
【0034】
マスク圧力トランスデューサ32は第1の電気信号を生成する。第1の電気信号は増幅器36によって増幅され、マスク12の中の空気圧力に比例した出力P(t)が生成される。この出力はサーボコントローラ20へ直接送られる。
【0035】
微分圧力トランスデューサ34は、流量限定要素28を横切る微分圧力を感知する。この微分圧力は、流量限定要素28及び管16を通る気流速度に関連する。微分圧力トランスデューサ34は第2の電気信号を生成する。第2の電気信号は増幅器38によって増幅される。この増幅された信号F(t)は気流信号と呼ばれる。なぜなら、F(t)は管16を通る気流を表すからである。代替として、流量はモータ電流から引き出されてもよい。
【0036】
気流信号F(t)はフィルタ40へ送られる。フィルタ40はプリセット範囲内で信号をフィルタリングする。フィルタ40及び増幅器36の出力はADC(アナログ/ディジタル)変換器42へ送られる。変換器42は、対応する信号をマイクロプロセッサ44へ生成する。マイクロプロセッサ44はアナログ制御信号を生成し、このアナログ制御信号は、DAC46によって、対応するディジタル制御信号へ変換され、サーボ20の参照信号Pset(t)として使用される。
【0037】
呼吸装置10の1つの動作方法は、図2のフローチャートで示される。当業者は、本明細書で開示される改良された流量平坦化指数を利用する他の方法論を認識する。図2の方法論の実施形態は、更に、米国特許第5,704,345号(‘345特許)で詳細に説明される。最初のステップ100は、時間にわたる呼吸流量を測定する。この情報はステップ102で処理され、後続処理で質的尺度として使用される指数値が生成される。こうして、ステップ102は、本明細書で開示される平均方法に基づいて、閉塞指数値を生成することを含む。ステップ104は、息指数と閾値とを比較することによって、無呼吸が起こっているかどうかを検出する。
【0038】
もしステップ104の答えが「イエス」であれば、無呼吸が進行中であり、Wickham又はBerthon−Jones特許で開示される方法によって、ステップ110の開存性の決定が続く。もし気道の開存性が存在すれば、開放気道を有する中心無呼吸が起こっており、もし所望されるならば、この事象はステップ112で記録される。もしステップ110の結果が、気道が開存していないことであれば、全閉塞無呼吸又は閉鎖気道を有する中心無呼吸が起こっており、これはステップ108におけるCPAP治療圧力の開始又は増加を結果する。もし所望されるならば、ステップ108は、検出された異常の任意的記録を含んでもよい。代替として、平坦化は、無呼吸が起こるとき単純に拒絶される。なぜなら、無呼吸が存在するとき、息パターンは、標本数、又は要求される一回呼吸量 − これは平坦化のための有効な息として要求される −のいずれかの規準を満足させないからである。
【0039】
もしステップ104の答えが「ノー」であれば、1つ又は複数の閉塞指数、例えば、改良された流量平坦化指数が、ステップ106で閾値と比較される。それによって、気道閉塞の決定が取得される。ステップ106で、もし答えが「イエス」であれば、部分閉塞が存在し、もし「ノー」であれば、閉塞は存在しない(正常)。
【0040】
気道の完全又は部分閉塞の場合、ステップ108が適用され、CPAP治療圧力の増加が続いて起こる。閉塞を有しない正常息の場合、無呼吸の生起を回避又は少なくとも低減するために要求される最小圧力を設定しようとする通常の方法論に従って、CPAP治療圧力が低減される。ステップ107における低減量は、もし所望されるならば、ゼロであってもよい。同様に、開存性気道を有する中心無呼吸の事象(ステップ110、112)では、治療圧力は増加されない。そのような圧力増加は、反射的に息を妨げ、更には息障害を悪化させる。
【0041】
改良された流量平坦化指数
図3は、典型的な息サイクルの吸息部分に関する気流信号を描写する。健康人の息サイクルの吸息部分では(実線)、気流は吸息と共に滑らかに上昇し、ピークに達し、滑らかにゼロへ降下する。しかしながら、部分閉塞気道を有する患者は(ダッシュ線)、吸息の間の顕著な平坦ゾーンによって特性化された息パターンを示す。理論的には、閉塞された流量の場合、部分閉塞の程度が増加するにつれて、吸息気流信号は方形波になる傾向がある。
【0042】
息における吸息及び呼息半サイクルの検出
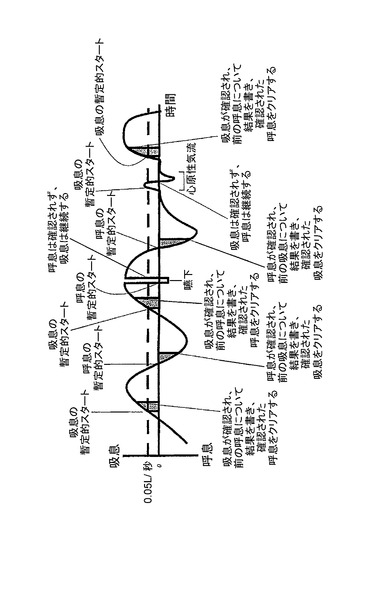
図4で示されるように、正常な呼吸サイクルは吸息、呼息、及び短い呼息終期休止から成り立つ。呼息終期休止の間に、心拍に起因して気流の小さな振動が起こる。吸息のスタートを正しく検出するため、心拍に起因する空気の小さなパルスを無視することが必要である。同様に、嚥下に起因する短い停止を無視することが必要である。
【0043】
吸息のスタートは、暫定的に、吸息気流が約0.05L/秒の閾値を超過した時点とされてもよい。全容量が約0.1リットルに到達する前に、もし流量が再びゼロよりも下に降下するならば、呼息は継続していると仮定される。
【0044】
呼息のスタートは、暫定的に、呼息気流がゼロよりも下に降下する時点とされる。呼息された全容量が約0.1リットルへ到達する前に、もし気流が吸息方向で約0.05L/秒よりも上に進むならば、吸息が継続していると仮定される。
【0045】
上記のアルゴリズムの目的は、各々の呼吸半サイクルのスタートと終わりを検出することである。この情報は形状検出器に必要である。この情報は、嚥下及び心原性気流(これらは0.1リットル容量の要件を達成しない)のような事象から影響を受けない。正常な息は約0.3L/秒のピーク流量及び0.5リットルの一回呼吸量を有する。こうして、正常な息を検出するための3〜5倍の予備能力が存在する。タイミング情報は、非常に小さい息は関係しない形状アルゴリズムに使用されるから、極端に小さい息に応答する必要はない。閾値交差点は、更なる低域フィルタリングなしに検出されるから、アルゴリズムは位相の遅延を導入しない。
【0046】
曲率又は平坦化指数の計算
正常な吸息流量・時間曲線は円形又は疑似正弦の形状である。気流を生み出すために利用可能な横隔膜の筋肉運動は、息の始まりと終わりで低く、息の中間で高い。十分なCPAP圧力を用いると、気道は本質的に剛性管として働き、流量は運動の関数となり、増加する運動は、増加する流量を生み出す。
【0047】
もしCPAP圧力が、無呼吸及びいびきを防止するには十分であるが、完全開存性を達成するには不十分であれば、気道は柔らかい伸縮管のように振る舞い、増加する運動は大気常態値以下の圧力を増加的に引き起こし、気道の累進狭窄を導く。或る閾値運動よりも上では、気道は狭くなる。即ち、増加狭窄は増加運動を正確に補償し、流量は運動から独立して一定になる。したがって、流量対時間曲線は、図5の中間パネルで示されるように、方形波を近似する。
【0048】
実際には、もし運動が、運動が最大になる息の中間部分の間でのみ閾値平坦化振る舞いよりも上にあれば、平坦化は吸息の中間半分にわたって最も目立つ。逆に、もし運動が非常に高いならば、慣性運動が息の早期に高い流量の短い期間を導き、図5の右方枠で示される初期行き過ぎを引き起こす。こうして、本発明のアルゴリズムは、息全体ではなく、特に吸息の中間半分に注目する。
【0049】
図5において、吸息流量対時間曲線は、単位持続時間及び面積へ尺度変更される。したがって、単位流量からのRMS偏差は吸息時間の中間50%にわたって計算される。左方のパネルは、RMS偏差が大きい正常曲線を示し、右方のパネルは、小さいRMS偏差を有する流量制限曲線を示す。
【0050】
流量・時間曲線の中間吸息平坦化の程度を定量化するため、次のステップを使用して曲率又は平坦化指数が引き出される。
【0051】
1.図6を参照すると、吸息半サイクルに含まれた呼息終期休止は、次のようにして削除される。即ち、流量がピーク吸息流量の75%へ最初に到達する場所「a」を発見し、流量がピークの25%へ最後に到達した点「b」を逆方向に探索し、逆方向に外挿して、半直線「ab」がx軸に到達した時間を突き止める。即ち、流量がゼロになるべき時間「c」を発見する。これは、吸息がスタートした最も早い時点とされる。更に、もし「c」が原点「d」の左方にあれば、原点「d」を使用する。
【0052】
2.流量・時間曲線に対する0.1Hz低域フィルタの近似効果は、次のように計算及び反転されてもよい。(a)同一の0.1Hz低域フィルタへ波を2回通す。(b)1回目にフィルタリングされた波から2回目にフィルタリングされた波を減じて、フィルタ効果の一次近似値を与える。(c)この差を元の波へ加える。代替として、この漏れフィルタに対する補償は、結果を顕著には変更しないと予期してもよく、したがって計算効率を目的として除去されてもよい。
【0053】
対象の息の場合、吸息持続時間は約2秒である。0.1Hzフィルタは波形状の或る歪みを生み出す。例えば、2秒方形波の立ち下がり縁は、振幅の20%だけ落ち込み、曲線の下の面積は10%だけ低減される。補正の後、立ち下がり縁は振幅の2%だけ落ち込み、曲線の下の面積は0.7%へ補正される。フィルタは正弦波の下の面積を10%だけ低減し、補正の後、面積は0.6%へ補正される。これは発明者らの現在の目的に十分である。
【0054】
3.行き過ぎの効果は、下記で説明されるように正規化される。
【0055】
4.吸息流量・時間曲線は、単位長さ及び単位平均高さへ尺度変更される。尺度変更は、発明者らが流量・時間曲線の振幅又は持続時間ではなく流量・時間曲線の形状(円形対平坦化)に関心を有するからである。正しいCPAP圧力を用いる場合でも、振幅及び持続時間は非常に変動する(具体的には、REM睡眠中だけでなく、段階1の睡眠及び吐息を伴う目覚め、など)。したがって、長さ及び振幅はCPAP圧力の妥当性に関して重要な情報を伝達しない。
【0056】
5.甚だしく異常な形状を有する息は、テンプレートと比較することによって検出される。中間半分の上の任意の点で、閾値よりも大きくテンプレートから異なる息は拒絶される。デフォルトの閾値は1.0単位である。
【0057】
6.波の中間部分について、参照振幅(M)からの吸息波の平均偏差が計算される。例えば、もし中間部分が吸い込み波の1/4であって中心にあれば、平均偏差は次式のようになる。
【数4】
【0058】
7.平坦化指数(FI)は、次式のように計算される。
【数5】
【0059】
実際の患者の場合、平坦化指数の典型的な値は正常曲線について約0.21を与える。0.15は閾値であり、それよりも下で機器はCPAP圧力を増加すべきである。
【0060】
8.もし息が拒絶されなければ、複数息点別移動平均流量・時間曲線が、例えば、5息平均で更新される。
【0061】
ステップ8の目的(5つの息にわたる波形の平均化)は、心原性気流の効果を低減することである。心原性気流は、そうでないときの平坦化された流量・時間曲線を偽装する。嚥下、咳、会話などは、非常に異常な形状の息を生み出す。ステップ5の目的は、そのような息が5息平均に含まれるのを防止することである。そのような息は、真性の流量制限の認識を遅延させる。
【0062】
ステップ8は必要でないかも知れない。なぜなら、流量制限の間、心原性圧力振動は、運動依存性に起因して、流速に重要な変化を引き起こさないからである。この場合、ステップ5も必要でない。なぜなら、咳、嚥下などは吸息の中間半分で平坦でなく、したがって非流量制限として正しく分類されるからである。
【0063】
ステップ3、即ち、行き過ぎの正規化は、幾つかの実施形態で達成されてもよい。本発明のこの態様は、(1)ピーク流量は波の中間部分の近くで起こること、(2)波の最初の1/3は一般的に正の勾配を有すること、(3)最後の1/3は一般的に負の勾配を有すること、(4)これらの条件からの偏差は行き過ぎを示すこと、と仮定する。
【0064】
1つの実施形態において、方法は、(1)波の中間部分、例えば、波の中間の1/3でピーク流量を推定するステップと、(2)その部分の外側、例えば、前記波の最初及び/又は最後の1/3において、前記ピーク流量を超過する任意の点が、ピーク流量に再設定されるステップとを含む。したがって、この方法は行き過ぎの影響を低減する。
【0065】
第2の実施形態において、方法は、(1)波の中間部分(例えば、1/3)でピーク流量を推定するステップと、(2)その部分の外側(例えば、前記波の最初及び/又は最後の1/3)でピーク流量を超過する点が、前後の標本の平均に再設定されるステップと、(3)ピーク流量よりも大きい外側部分の標本がなくなるまでプロセスを継続するステップとを含む。この方法は再び行き過ぎの影響を低減し、同時に波形の形状を維持する。
【0066】
第3の(好ましい)実施形態において、方法は、(1)波をn個の部分に分割し、各々の部分について平均振幅を計算するステップと、(2)パターンが、どのような種類の波を示すかを決定する論理を適用するステップと、(3)もし行き過ぎが示されたならば、平坦化を低にマークするステップとから構成される。
【0067】
第4の実施形態において、方法は、(1)波の中間半分においてn個の標本ごとに平坦化の推定値を計算する(例えば、標本16..24、17..25、などについて平坦化を計算する)ステップと、(2)全ての標本順列について取得された最低値に対応する値として、平坦化指数をマークするステップとから構成される。
【0068】
M形検出の代替の統計計算
本発明の代替の実施形態は、異なる方策を使用して、吸息波パターンがM形を有するかどうかを決定する。手法は、吸息波を特徴ベクトル(浮動小数点数)及び直交する基底ベクトル行列対へ分解することである。時間区間を正規化して、吸息がゼロで始まってBラジアンで終わるようにし、基底ベクトルはsin(Bt)及びsin(3Bt)であるように選択されてもよい。こうして、吸息波形は曲線a sin(Bt)+b sin(3Bt)へ当て嵌められる。ここで、a及びbは、特異値分解を使用し、最小二乗の意味で基底ベクトルを吸息波形へ当て嵌めることによって決定される。これは、基底行列の疑似逆を発見し、この疑似逆数を吸息波形へ乗じて因子を発見することと等価である。疑似逆は、オフラインで、即ち、人工呼吸装置に格納されたCPUによらずに、計算可能である。
【0069】
この統計計算に含まれる計算の量を低減するため、多くの患者について[a,b]空間をマップし、個々の患者を表す点が落ちる集団を記録することが可能である。M形息は、非M形息から離れて集まることが発見される。こうして、息がM形であるかどうかは、M集団の中心からのユークリッド距離測定によって決定可能である。
【0070】
M形指数計算の例
各々の吸息は、N個、好ましくはN=65の点の格子の上で補間される。図7で示される2つの基礎関数が、t=i/(N−1)について計算される。ここで、iは0からN−1へ進む。
B1=sin(πt)
B2=sin(3πt)
【0071】
次に、これらの基礎関数は、M形特徴の全ての後続計算で使用されるように記憶可能である。
【0072】
次に、各々の吸息は、N個の点の格子の上で抽出及び補間される。次に、2つの因子が次のように計算される。
F1=sum(B1・fs)
F2=sum(B2・fs)
ここで、fsは補間された吸息点を表し、・は点乗積演算子である。
【0073】
最終の形状値は、次のように正規化することによって取得される。
【数6】
【0074】
次に、この形状因子は、0(純粋に正弦)と1(非常にM形)との間で変動するように制限される。
【0075】
図8で示されるように、典型的なM形息の場合、上記の計算は次の結果を与える。
F1=4.6082
F2=2.6538
形状指数=0.50である。これは、単に約0.2のM形指数を有する典型的な非流量制限息と対比されてもよい。
【0076】
本発明は特定の実施形態を参照して説明されたが、この実施形態は、本発明の原理の適用を例証するだけであることを理解すべきである。したがって、本発明の例証的実施形態で多くの修正が行われてもよく、本発明の趣旨及び範囲から逸脱することなく他の配列が考え出されてもよいことを理解すべきである。例えば、本発明の好ましい実施形態は、波形を特定の解析切片へ分割し、中心値に専念したが、他の分割及び中心外領域が、同じように適用されてもよい。
【符号の説明】
【0077】
10…呼吸装置、12…マスク、14…送風機、16…可撓管、18…モータ、20…サーボコントローラ、22…空気出口、24…制御回路、26…排気口、28…流量限定要素、30…管、32…マスク圧力トランスデューサ、33…管、34…微分圧力トランスデューサ、36…増幅器、38…増幅器、40…フィルタ、42…変換器、44…マイクロプロセッサ。
【技術分野】
【0001】
本発明は、睡眠時無呼吸又は減呼吸を含む呼吸状態を診断及び治療する改良された方法及び装置に関する。具体的には、本発明は、呼吸気流曲線の吸息部分の時間展開の解析に基づき、患者の気道の部分的又は全面的閉塞を検出することに関する。本発明は、更に、CPAP人工呼吸装置によって適用される治療圧力を調節する装置に関する。
【背景技術】
【0002】
閉塞睡眠時無呼吸(OSA)、即ち、無呼吸、減呼吸、及び猛烈ないびきを含む症状は、可能性として心臓疾患型を含む重大な健康問題をもたらす睡眠中断を引き起す。OSAは、人の気道通路部分の虚脱によって引き起こされる。OSAに選択される治療は、患者の気道を開いたままに保つ持続的気道陽圧法(CPAP)の施術である。通常、圧力範囲4〜20cm H2Oにある空気がモータ駆動送風機によって供給される。送風機の出力は空気配送機器を通過し、患者の気道へ密閉的に係合する。マスク、気管切開チューブ、気管内チューブ、鼻枕、又は他の適切な機器が使用されてもよい。空気配送機器に隣接した配送管の中に排気口が設けられる。二層CPAPと呼ばれるCPAP機器は、吸息及び呼息の息サイクルを感知し、吸い込み及び吐き出しの間に異なる正の圧力レベルを提供するものがある。幾つかの自己滴定CPAP機器は、OSAを解消する最小圧力を選択することによって、個々の患者について適切な圧力レベルを決定するように設計される。そのような機器において、いつOSAが存在するかを決定するために呼吸パラメータのパターンが監視され、適切なパターンが検出されると、CPAP圧力が上げられて増加した気道圧力が提供され、理想的には、閉塞エピソード及び他の形態の息障害の生起が覆される。そのような機器は、米国特許第5,148,802号及び5,245,995号で説明されている。
【0003】
典型的には、OSAを患っている人は、睡眠検査室で診断及び治療される。睡眠検査室では、最初の夜間睡眠期間中に不快の存在が確認され、2番目の夜間睡眠期間中に適切な治療圧力が決定される。生じる1つの問題は、人が異なる段階の睡眠を経るにつれて、適切な圧力が夜間中に変動することである。したがって、OSAの存在を決定し、圧力レベルを最適圧力へ修正することのできる簡単な装置を、患者自身の家庭で使用する必要があると長い間思われてきた。時間の関数としての気流曲線の形状解析からOSAの存在を決定するため、幾つかの試行が行われたが成功はまちまちであった。
【0004】
閉塞睡眠時無呼吸における上方気道圧力・流量関係の監視は、Smith et al.,1988,J.Appl Physiol.64:789−795で説明されている。この論文の図1は、増加する鼻圧力の変動レベルにおけるポリグラフ睡眠記録を示す。吸息容量流量は或る息で安定水準に達し、これは気流制限の存在を示唆することが特筆された。マスク圧力又は食道内の圧力に対する中間吸息気流を描くことによって、圧力・流量曲線が構築された。次に、平均中間吸息流量に対する鼻圧力の圧力・流量図表が最小二乗線形回帰によって当て嵌められ、虚脱可能場所の上流抵抗が計算された。
【0005】
上方気道圧力・流量関係への正の鼻圧力の効果は、Schwartz et al.,1989,J.Appl Physiol.66:1626−1634で説明されている。この論文の図4は、圧力・流量の記録が低圧力レベルで安定水準に達すること示す。更に、圧力が増加されたとき、流量は安定水準に達しなかったことが示された。
【0006】
米国特許第5,335,654号(Rapoport)は、OSAを患っている患者について気流対時間曲線へのCPAPの効果を示す。Rapoportの図1〜図5は、圧力が2cm H2Oの階段で10cm H2Oから2cm H2Oへ低減されるにつれて、気流対時間の曲線は、ほとんど滑らかな正弦パターンから、初期及び終期に流量スパイクを有して曲線の吸息部分が平坦化されたパターンへ変化することを示す。2cm H2Oにおいて、曲線は、いわゆるM形(即ち、中間に脈動波を有する)を展開し、更に平坦化された中間領域の各々の端に行き過ぎ(即ち、ピーク)を展開した。閉塞を示す流量形状を特性化する試みの中で、Rapoportは流量制限及び/又は部分閉塞パターンを示すと称される幾つかの指数を列挙している。これらの指数の中には、(1)流量信号の導関数がゼロであること、(2)延長された区間について流量信号のピーク間の第2の導関数がゼロであること、(3)中間吸息流量に対する早期吸息流量の比が1より小さいか等しいこと、が含まれる。この特許は、更に、閉塞の指標と称される事象を列挙している。即ち、(1)ピーク吸息流量をピーク呼息流量へ接続する線の傾斜が低減すること、(2)流量信号の上向き又は下向き行程(dV/dt)が急峻であること、及び(3)呼息流量に対する吸息流量の比が0.5を超えることである。
【0007】
CPAP治療の管理に関しては、閉塞を示す異常息パターンを感知及び検出する様々な手法が公知である。例えば、米国特許第5,245,995号(Sullivan et al.)は、睡眠中の吸息及び呼息圧力を測定することによって、いびき及び異常息パターンを検出し、閉塞前エピソード又は他の形態の息障害の早期表示を導く方法を説明している。具体的には、呼吸パラメータのパターンが監視され、既定のパターンが検出されると、CPAP圧力が上げられて増加気道圧力が提供され、理想的には、閉塞エピソード及び他の形態の息障害の生起が防止される。
【0008】
米国特許第5,645,053号(Remmers)は、平坦度指数の計算を説明する。この場合、平坦度とは、平均気流からの観察気流の相対的偏差であると定義される。Remmersにおいて、気流の個々の値は、吸息期間の40%と80%との間で取得される。吸息流量の個々の値から、平均値が計算及び減じられる。個々の差は二乗され、観察総数マイナス1によって割られる。この結果の平方根は、相対変分を決定するために使用される。相対変分は平均吸息気流によって割られ、当該息について相対変分又は変分係数が与えられる。
【0009】
米国特許第5,704,345号(Berthon−Jones)は、患者の監視された呼吸気流の吸息部分の平坦化をパラメータ化する2つの閉塞指数値を計算することによって、患者の気道の部分閉塞を検出する方法を開示する。次に、いずれかの閉塞指数が閾値と比較される。第1の形状因子は、息サイクルの吸息気流の中間部分の平均と吸息気流の平均との比を包含する。
【数1】
ここで、fs(t)は患者吸息気流の標本であり、Mは
【数2】
によって与えられる吸息気流の平均である。
【0010】
第2の形状因子は、次式に従って、吸息気流の中間部分のルート平均平方偏差と平均吸息気流との比を包含する。
【数3】
【0011】
米国特許第6,814,073号(Wickham)は、吸息気流に基づいて或る形態の閉塞を検出する方法及び装置を開示する。この方法において、中間吸息に対応する吸息気流標本が同定される。1つの実施形態において、吸息気流標本が、閾値レベル、例えば、平均気流よりも小さいか大きいかに基づいて、加重因子が適用される。他の実施形態では、息における標本の時間位置に基づいて、異なる加重因子が標本へ適用される。吸息中の或る事象に先行して取られた標本、例えば、吸息の中間点に先立つ標本は、事象に後続する標本よりも低い加重因子を割り当てられる。次に、対応する加重因子を有するこれらの標本を使用して、閉塞指数が計算される。
【発明の概要】
【発明が解決しようとする課題】
【0012】
これらの開示された全ての手法は、或る型の流量パターン、特に、M波パターンにおける流量制限を検出することはできない。更に一般的には、先導又は遅延する行き過ぎを呈示す吸気パターンにおける流量制限が適切に検出されない。検出可能度は、2つの因子、即ち、(1)行き過ぎが吸息気流の中間部分にわたる範囲、及び(2)行き過ぎの大きさ、に依存する。もし行き過ぎの大きさが比較的に小さく、中間吸息の大きな部分に広がらず、吸息気流の後の半分に存在しなければ、Wickhamによって呈示された解決法は満足に働く。しかしながら、Wickham方法からの平坦化指数は、時には、Berthon−Jonesによって開示された方法からの指数ほど正確ではない。本発明の1つの態様は、米国特許第5,704,345号(Berthon−Jones)で言及されたアルゴリズムを単純化することである。この米国特許の開示は、参照して組み入れられる。こうして、本発明の目的は、言及された制限、特に、行き過ぎを有するM波パターンが存在するときに流量制限を検出できる方法を呈示することである。
【0013】
従来技術によって説明された流量制限検出/推定手法は、更に、ディジタル処理能力及び要求される流量検出正確度の点で費用が高い。したがって、低コストの電子/ソフトウェア・プラットフォームにおける手法の利用性が制限される。したがって、本発明の他の目的は、アルゴリズムを単純化して、低価格帯の電子及びソフトウェア・プラットフォームがアルゴリズムを受け入れやすくすることである。
【課題を解決するための手段】
【0014】
本発明は、吸息気流の平坦化に基づいて、呼吸閉塞の幾つかの形態を検出する改良方法及び装置に関連する。
【0015】
本発明の1つの態様は、患者の気道の部分閉塞を検出する方法である。この方法は、患者からの呼吸気流を測定するステップと、気流の吸息部分を検出するステップと、吸息部分を整形して呼息休止を除去するステップと、派生物(offshoot)の効果を正規化するステップと、吸息流量を参照値へ尺度変更するステップと、吸息気流の中心部分の平均偏差を計算するステップと、平均偏差から平坦化指数を計算するステップと、移動平均フィルタを用いて平坦化指数をフィルタリングするステップとを備える。
【0016】
部分閉塞を検出する方法に関しては、行き過ぎ(overshoot)の正規化補正が行われる。正規化補正が行われない行き過ぎは、吸息気流の円形推定を誇張する。
【0017】
本発明の実施形態において、行き過ぎの正規化は、吸息気流の中心部分の外側にあって吸息気流の中心部分の平均値を超過する気流値を打ち切ることによって達成される。
【0018】
本発明の他の実施形態では、吸息気流波を複数の部分へ分割し、各々の部分について平均振幅を計算し、平均振幅を解析して行き過ぎの存在を決定し、もし行き過ぎが示されたならば、平坦化を低として取り扱うことによって、行き過ぎが評価される。
【0019】
本発明の更なる実施形態において、最大平坦度の探求は、吸息波形の中間部分の各々の可能な標本について平坦化指数の集合を計算し、吸息波形の平坦化指数を、計算された指数の最小値とすることによって実行される。
【0020】
こうして、本発明の態様は、ピーク流量の位置が吸息流量曲線の中心から外れる範囲によって、患者の息における流量制限の範囲を推定することである。
【0021】
本発明の更なる態様は、息の異なる部分の相対平均振幅が、正常な息によって示されるパターンから外れる範囲によって、流量制限を推定することである。
【0022】
本発明の更なる態様は、最大平坦度を示す息部分を探求することによって、流量制限の範囲を推定する方法を提供することである。
【0023】
本発明の目的は、患者の部分的又は全体的気道閉塞が、患者の気道の部分閉塞を検出する方法により呼吸気流を解析することによって検出される装置を提供することである。前記方法が、患者からの呼吸気流を測定するステップと、この気流の吸息部分を検出するステップと、吸息部分を整形して呼息休止を除去するステップと、行き過ぎの効果を正規化するステップと、吸息流量を参照値へ尺度変更するステップと、吸息気流の中心部分の平均偏差を計算するステップと、平均偏差から平坦化指数を計算するステップと、移動平均フィルタを用いて平坦化指数をフィルタリングするステップとを備える。
【0024】
更なる目的は、追加のコンポーネントを使用することなく、又は、既存の呼吸装置の構造へ実質的な変更を施すことなく、気道閉塞を検出する改良アルゴリズムが実現される装置を提供することである。
【0025】
したがって、患者の呼吸気流が継続的に監視され、吸息に関連づけられた呼吸気流部分が同定及び標本化される呼吸装置が提供される。
【0026】
1つの態様において、本発明は呼吸装置に関連する。この呼吸装置は、加圧されて呼吸可能な空気を患者へ選択的に提供するようになっている空気源と、患者からの呼吸気流を感知し、気流を示す気流信号を生成する流量検出機器と、患者の気道の部分閉塞を検出する方法であって、患者からの呼吸気流を測定するステップと、この気流の吸息部分を検出するステップと、吸息部分を整形して呼息休止を除去するステップと、派生物の効果を正規化するステップと、吸息流量を参照値へ尺度変更するステップと、吸息気流の中心部分の平均偏差を計算するステップと、平均偏差から平坦化指数を計算するステップと、移動平均フィルタを用いて平坦化指数をフィルタリングするステップを含む方法を実現し、前記流量センサへ結合された閉塞検出器と、及び圧力センサ等価物へ接続された圧力コントローラとを含む。この圧力コントローラは、空気源の動作を制御し、閉塞信号を受け取り、閉塞信号に応答して空気源の動作を変更するように、物理的又は論理的に配列される。流量検出機器の用語は、流量センサ又は代替の流量検出機器又はアルゴリズム、例えば、モータ電流から流量を決定するものを含む一般的な用語であることを意図される。
【0027】
本発明の他の態様は、睡眠障害を有する患者を監視及び/又は治療する装置に関係する。この装置は、患者の呼吸を感知し、対応する流量信号を生成する流量検出機器と、及び流量検出機器へ結合され、患者の気道の部分閉塞を検出する方法を実現するようになっている閉塞検出器とを含む。前記方法が、患者からの呼吸気流を測定するステップと、この気流の吸息部分を検出するステップと、吸息部分を整形して呼息休止を除去するステップと、派生物の効果を正規化するステップと、吸息流量を参照値へ尺度変更するステップと、吸息気流の中心部分の平均偏差を計算するステップと、平均偏差から平坦化指数を計算するステップと、移動平均フィルタを用いて平坦化指数をフィルタリングするステップを備え、閉塞検出器は、平坦化指数に基づいて気道閉塞を示す信号を生成する信号生成器を含む。
【0028】
本発明の更なる態様は、睡眠障害を有する患者を治療する装置に関係する。この装置は、マスク、このマスクを介して、加圧されて呼吸可能な空気を患者へ選択的に供給する気体源と、気流を感知し、呼吸を示す流量信号を生成する流量検出機器と、流量検出機器へ結合され、患者の気道の部分閉塞を検出する方法であって、患者からの呼吸気流を測定するステップと、この気流の吸息部分を検出するステップと、吸息部分を整形して呼息休止を除去するステップと、派生物の効果を正規化するステップと、吸息流量を参照値へ尺度変更するステップと、吸息気流の中心部分の平均偏差を計算するステップと、平均偏差から平坦化指数を計算するステップと、移動平均フィルタを用いて平坦化指数をフィルタリングするステップを含む方法を実現するようになっている閉塞検出器と、閉塞信号を受け取り、応答して気体源を活性化する指令を生成するコントローラとを備える。
【0029】
本発明の他の態様は、患者の気道の中の閉塞を検出する方法に関係する。この方法は、患者の気流を測定するステップと、前記気流の所定の区分を検出するステップと、患者の気道の部分閉塞を検出する方法であって、患者からの呼吸気流を測定する工程と、この気流の吸息部分を検出する工程と、吸息部分を整形して呼息休止を除去する工程と、派生物の効果を正規化する工程と、吸息流量を参照値へ尺度変更する工程と、吸息気流の中心部分の平均偏差を計算する工程と、平均偏差から平坦化指数を計算する工程と、移動平均フィルタを用いて平坦化指数をフィルタリングする工程を備える方法を実現するステップを含む。
【図面の簡単な説明】
【0030】
【図1】本発明に従って構築された呼吸装置のブロック図を示す。
【図2】図1の装置の動作を図解するフローチャートを示す。
【図3】健康人及び部分気道閉塞を有する人について、典型的な呼吸信号の吸息段階を示す。
【図4】正常な息サイクルを示す。
【図5】正常及び流量制限の流量対時間曲線を示し、左方のパネルは正常曲線を示し、右方のパネルは流量制限曲線を示す。
【図6】2つの可能な息について、時間に対する吸息流量を示す。
【図7】M形指数の計算に使用される基底ベクトルのグラフである。
【図8】典型的なM形息のグラフである。
【発明を実施するための形態】
【0031】
装置及び方法論
図1は、本発明に従って構築された例示的呼吸装置10を示す。呼吸装置10は、可撓管16によって送風機14へ接続されたマスク12を含む。マスク12は、患者へ嵌められ、鼻マスク又はフェースマスクであってもよい。送風機14は空気出口22を有し、空気出口22は、サーボコントローラ20からの制御信号に従って、モータ18によって駆動される。この配列によって、呼吸装置10は加圧された空気(又は、図示されない源から酸素を強化された空気)を配送することができる。加圧された空気は、管16によってマスク12へ配送される。管16は狭い排気口26を設けられ、患者によって吐き出された空気は排気口26を介して追い出される。
【0032】
所定の規準を使用してサーボコントローラ20及びモータ18の動作を制御し、それによって装置10の動作モードを規定するため、制御回路24が使用される。好ましくは、本発明によれば、制御回路24は、装置10を動作させてCPAPを患者へ提供するように適応される。
【0033】
制御回路24は流量限定要素28を含む。管30及び31は、それぞれ限定要素28の異なる側からマスク圧力トランスデューサ32及び微分圧力トランスデューサ34へ導かれる。マスク圧力トランスデューサ32は、更に、他の管33を介して微分圧力トランスデューサ34へ接続される。
【0034】
マスク圧力トランスデューサ32は第1の電気信号を生成する。第1の電気信号は増幅器36によって増幅され、マスク12の中の空気圧力に比例した出力P(t)が生成される。この出力はサーボコントローラ20へ直接送られる。
【0035】
微分圧力トランスデューサ34は、流量限定要素28を横切る微分圧力を感知する。この微分圧力は、流量限定要素28及び管16を通る気流速度に関連する。微分圧力トランスデューサ34は第2の電気信号を生成する。第2の電気信号は増幅器38によって増幅される。この増幅された信号F(t)は気流信号と呼ばれる。なぜなら、F(t)は管16を通る気流を表すからである。代替として、流量はモータ電流から引き出されてもよい。
【0036】
気流信号F(t)はフィルタ40へ送られる。フィルタ40はプリセット範囲内で信号をフィルタリングする。フィルタ40及び増幅器36の出力はADC(アナログ/ディジタル)変換器42へ送られる。変換器42は、対応する信号をマイクロプロセッサ44へ生成する。マイクロプロセッサ44はアナログ制御信号を生成し、このアナログ制御信号は、DAC46によって、対応するディジタル制御信号へ変換され、サーボ20の参照信号Pset(t)として使用される。
【0037】
呼吸装置10の1つの動作方法は、図2のフローチャートで示される。当業者は、本明細書で開示される改良された流量平坦化指数を利用する他の方法論を認識する。図2の方法論の実施形態は、更に、米国特許第5,704,345号(‘345特許)で詳細に説明される。最初のステップ100は、時間にわたる呼吸流量を測定する。この情報はステップ102で処理され、後続処理で質的尺度として使用される指数値が生成される。こうして、ステップ102は、本明細書で開示される平均方法に基づいて、閉塞指数値を生成することを含む。ステップ104は、息指数と閾値とを比較することによって、無呼吸が起こっているかどうかを検出する。
【0038】
もしステップ104の答えが「イエス」であれば、無呼吸が進行中であり、Wickham又はBerthon−Jones特許で開示される方法によって、ステップ110の開存性の決定が続く。もし気道の開存性が存在すれば、開放気道を有する中心無呼吸が起こっており、もし所望されるならば、この事象はステップ112で記録される。もしステップ110の結果が、気道が開存していないことであれば、全閉塞無呼吸又は閉鎖気道を有する中心無呼吸が起こっており、これはステップ108におけるCPAP治療圧力の開始又は増加を結果する。もし所望されるならば、ステップ108は、検出された異常の任意的記録を含んでもよい。代替として、平坦化は、無呼吸が起こるとき単純に拒絶される。なぜなら、無呼吸が存在するとき、息パターンは、標本数、又は要求される一回呼吸量 − これは平坦化のための有効な息として要求される −のいずれかの規準を満足させないからである。
【0039】
もしステップ104の答えが「ノー」であれば、1つ又は複数の閉塞指数、例えば、改良された流量平坦化指数が、ステップ106で閾値と比較される。それによって、気道閉塞の決定が取得される。ステップ106で、もし答えが「イエス」であれば、部分閉塞が存在し、もし「ノー」であれば、閉塞は存在しない(正常)。
【0040】
気道の完全又は部分閉塞の場合、ステップ108が適用され、CPAP治療圧力の増加が続いて起こる。閉塞を有しない正常息の場合、無呼吸の生起を回避又は少なくとも低減するために要求される最小圧力を設定しようとする通常の方法論に従って、CPAP治療圧力が低減される。ステップ107における低減量は、もし所望されるならば、ゼロであってもよい。同様に、開存性気道を有する中心無呼吸の事象(ステップ110、112)では、治療圧力は増加されない。そのような圧力増加は、反射的に息を妨げ、更には息障害を悪化させる。
【0041】
改良された流量平坦化指数
図3は、典型的な息サイクルの吸息部分に関する気流信号を描写する。健康人の息サイクルの吸息部分では(実線)、気流は吸息と共に滑らかに上昇し、ピークに達し、滑らかにゼロへ降下する。しかしながら、部分閉塞気道を有する患者は(ダッシュ線)、吸息の間の顕著な平坦ゾーンによって特性化された息パターンを示す。理論的には、閉塞された流量の場合、部分閉塞の程度が増加するにつれて、吸息気流信号は方形波になる傾向がある。
【0042】
息における吸息及び呼息半サイクルの検出
図4で示されるように、正常な呼吸サイクルは吸息、呼息、及び短い呼息終期休止から成り立つ。呼息終期休止の間に、心拍に起因して気流の小さな振動が起こる。吸息のスタートを正しく検出するため、心拍に起因する空気の小さなパルスを無視することが必要である。同様に、嚥下に起因する短い停止を無視することが必要である。
【0043】
吸息のスタートは、暫定的に、吸息気流が約0.05L/秒の閾値を超過した時点とされてもよい。全容量が約0.1リットルに到達する前に、もし流量が再びゼロよりも下に降下するならば、呼息は継続していると仮定される。
【0044】
呼息のスタートは、暫定的に、呼息気流がゼロよりも下に降下する時点とされる。呼息された全容量が約0.1リットルへ到達する前に、もし気流が吸息方向で約0.05L/秒よりも上に進むならば、吸息が継続していると仮定される。
【0045】
上記のアルゴリズムの目的は、各々の呼吸半サイクルのスタートと終わりを検出することである。この情報は形状検出器に必要である。この情報は、嚥下及び心原性気流(これらは0.1リットル容量の要件を達成しない)のような事象から影響を受けない。正常な息は約0.3L/秒のピーク流量及び0.5リットルの一回呼吸量を有する。こうして、正常な息を検出するための3〜5倍の予備能力が存在する。タイミング情報は、非常に小さい息は関係しない形状アルゴリズムに使用されるから、極端に小さい息に応答する必要はない。閾値交差点は、更なる低域フィルタリングなしに検出されるから、アルゴリズムは位相の遅延を導入しない。
【0046】
曲率又は平坦化指数の計算
正常な吸息流量・時間曲線は円形又は疑似正弦の形状である。気流を生み出すために利用可能な横隔膜の筋肉運動は、息の始まりと終わりで低く、息の中間で高い。十分なCPAP圧力を用いると、気道は本質的に剛性管として働き、流量は運動の関数となり、増加する運動は、増加する流量を生み出す。
【0047】
もしCPAP圧力が、無呼吸及びいびきを防止するには十分であるが、完全開存性を達成するには不十分であれば、気道は柔らかい伸縮管のように振る舞い、増加する運動は大気常態値以下の圧力を増加的に引き起こし、気道の累進狭窄を導く。或る閾値運動よりも上では、気道は狭くなる。即ち、増加狭窄は増加運動を正確に補償し、流量は運動から独立して一定になる。したがって、流量対時間曲線は、図5の中間パネルで示されるように、方形波を近似する。
【0048】
実際には、もし運動が、運動が最大になる息の中間部分の間でのみ閾値平坦化振る舞いよりも上にあれば、平坦化は吸息の中間半分にわたって最も目立つ。逆に、もし運動が非常に高いならば、慣性運動が息の早期に高い流量の短い期間を導き、図5の右方枠で示される初期行き過ぎを引き起こす。こうして、本発明のアルゴリズムは、息全体ではなく、特に吸息の中間半分に注目する。
【0049】
図5において、吸息流量対時間曲線は、単位持続時間及び面積へ尺度変更される。したがって、単位流量からのRMS偏差は吸息時間の中間50%にわたって計算される。左方のパネルは、RMS偏差が大きい正常曲線を示し、右方のパネルは、小さいRMS偏差を有する流量制限曲線を示す。
【0050】
流量・時間曲線の中間吸息平坦化の程度を定量化するため、次のステップを使用して曲率又は平坦化指数が引き出される。
【0051】
1.図6を参照すると、吸息半サイクルに含まれた呼息終期休止は、次のようにして削除される。即ち、流量がピーク吸息流量の75%へ最初に到達する場所「a」を発見し、流量がピークの25%へ最後に到達した点「b」を逆方向に探索し、逆方向に外挿して、半直線「ab」がx軸に到達した時間を突き止める。即ち、流量がゼロになるべき時間「c」を発見する。これは、吸息がスタートした最も早い時点とされる。更に、もし「c」が原点「d」の左方にあれば、原点「d」を使用する。
【0052】
2.流量・時間曲線に対する0.1Hz低域フィルタの近似効果は、次のように計算及び反転されてもよい。(a)同一の0.1Hz低域フィルタへ波を2回通す。(b)1回目にフィルタリングされた波から2回目にフィルタリングされた波を減じて、フィルタ効果の一次近似値を与える。(c)この差を元の波へ加える。代替として、この漏れフィルタに対する補償は、結果を顕著には変更しないと予期してもよく、したがって計算効率を目的として除去されてもよい。
【0053】
対象の息の場合、吸息持続時間は約2秒である。0.1Hzフィルタは波形状の或る歪みを生み出す。例えば、2秒方形波の立ち下がり縁は、振幅の20%だけ落ち込み、曲線の下の面積は10%だけ低減される。補正の後、立ち下がり縁は振幅の2%だけ落ち込み、曲線の下の面積は0.7%へ補正される。フィルタは正弦波の下の面積を10%だけ低減し、補正の後、面積は0.6%へ補正される。これは発明者らの現在の目的に十分である。
【0054】
3.行き過ぎの効果は、下記で説明されるように正規化される。
【0055】
4.吸息流量・時間曲線は、単位長さ及び単位平均高さへ尺度変更される。尺度変更は、発明者らが流量・時間曲線の振幅又は持続時間ではなく流量・時間曲線の形状(円形対平坦化)に関心を有するからである。正しいCPAP圧力を用いる場合でも、振幅及び持続時間は非常に変動する(具体的には、REM睡眠中だけでなく、段階1の睡眠及び吐息を伴う目覚め、など)。したがって、長さ及び振幅はCPAP圧力の妥当性に関して重要な情報を伝達しない。
【0056】
5.甚だしく異常な形状を有する息は、テンプレートと比較することによって検出される。中間半分の上の任意の点で、閾値よりも大きくテンプレートから異なる息は拒絶される。デフォルトの閾値は1.0単位である。
【0057】
6.波の中間部分について、参照振幅(M)からの吸息波の平均偏差が計算される。例えば、もし中間部分が吸い込み波の1/4であって中心にあれば、平均偏差は次式のようになる。
【数4】
【0058】
7.平坦化指数(FI)は、次式のように計算される。
【数5】
【0059】
実際の患者の場合、平坦化指数の典型的な値は正常曲線について約0.21を与える。0.15は閾値であり、それよりも下で機器はCPAP圧力を増加すべきである。
【0060】
8.もし息が拒絶されなければ、複数息点別移動平均流量・時間曲線が、例えば、5息平均で更新される。
【0061】
ステップ8の目的(5つの息にわたる波形の平均化)は、心原性気流の効果を低減することである。心原性気流は、そうでないときの平坦化された流量・時間曲線を偽装する。嚥下、咳、会話などは、非常に異常な形状の息を生み出す。ステップ5の目的は、そのような息が5息平均に含まれるのを防止することである。そのような息は、真性の流量制限の認識を遅延させる。
【0062】
ステップ8は必要でないかも知れない。なぜなら、流量制限の間、心原性圧力振動は、運動依存性に起因して、流速に重要な変化を引き起こさないからである。この場合、ステップ5も必要でない。なぜなら、咳、嚥下などは吸息の中間半分で平坦でなく、したがって非流量制限として正しく分類されるからである。
【0063】
ステップ3、即ち、行き過ぎの正規化は、幾つかの実施形態で達成されてもよい。本発明のこの態様は、(1)ピーク流量は波の中間部分の近くで起こること、(2)波の最初の1/3は一般的に正の勾配を有すること、(3)最後の1/3は一般的に負の勾配を有すること、(4)これらの条件からの偏差は行き過ぎを示すこと、と仮定する。
【0064】
1つの実施形態において、方法は、(1)波の中間部分、例えば、波の中間の1/3でピーク流量を推定するステップと、(2)その部分の外側、例えば、前記波の最初及び/又は最後の1/3において、前記ピーク流量を超過する任意の点が、ピーク流量に再設定されるステップとを含む。したがって、この方法は行き過ぎの影響を低減する。
【0065】
第2の実施形態において、方法は、(1)波の中間部分(例えば、1/3)でピーク流量を推定するステップと、(2)その部分の外側(例えば、前記波の最初及び/又は最後の1/3)でピーク流量を超過する点が、前後の標本の平均に再設定されるステップと、(3)ピーク流量よりも大きい外側部分の標本がなくなるまでプロセスを継続するステップとを含む。この方法は再び行き過ぎの影響を低減し、同時に波形の形状を維持する。
【0066】
第3の(好ましい)実施形態において、方法は、(1)波をn個の部分に分割し、各々の部分について平均振幅を計算するステップと、(2)パターンが、どのような種類の波を示すかを決定する論理を適用するステップと、(3)もし行き過ぎが示されたならば、平坦化を低にマークするステップとから構成される。
【0067】
第4の実施形態において、方法は、(1)波の中間半分においてn個の標本ごとに平坦化の推定値を計算する(例えば、標本16..24、17..25、などについて平坦化を計算する)ステップと、(2)全ての標本順列について取得された最低値に対応する値として、平坦化指数をマークするステップとから構成される。
【0068】
M形検出の代替の統計計算
本発明の代替の実施形態は、異なる方策を使用して、吸息波パターンがM形を有するかどうかを決定する。手法は、吸息波を特徴ベクトル(浮動小数点数)及び直交する基底ベクトル行列対へ分解することである。時間区間を正規化して、吸息がゼロで始まってBラジアンで終わるようにし、基底ベクトルはsin(Bt)及びsin(3Bt)であるように選択されてもよい。こうして、吸息波形は曲線a sin(Bt)+b sin(3Bt)へ当て嵌められる。ここで、a及びbは、特異値分解を使用し、最小二乗の意味で基底ベクトルを吸息波形へ当て嵌めることによって決定される。これは、基底行列の疑似逆を発見し、この疑似逆数を吸息波形へ乗じて因子を発見することと等価である。疑似逆は、オフラインで、即ち、人工呼吸装置に格納されたCPUによらずに、計算可能である。
【0069】
この統計計算に含まれる計算の量を低減するため、多くの患者について[a,b]空間をマップし、個々の患者を表す点が落ちる集団を記録することが可能である。M形息は、非M形息から離れて集まることが発見される。こうして、息がM形であるかどうかは、M集団の中心からのユークリッド距離測定によって決定可能である。
【0070】
M形指数計算の例
各々の吸息は、N個、好ましくはN=65の点の格子の上で補間される。図7で示される2つの基礎関数が、t=i/(N−1)について計算される。ここで、iは0からN−1へ進む。
B1=sin(πt)
B2=sin(3πt)
【0071】
次に、これらの基礎関数は、M形特徴の全ての後続計算で使用されるように記憶可能である。
【0072】
次に、各々の吸息は、N個の点の格子の上で抽出及び補間される。次に、2つの因子が次のように計算される。
F1=sum(B1・fs)
F2=sum(B2・fs)
ここで、fsは補間された吸息点を表し、・は点乗積演算子である。
【0073】
最終の形状値は、次のように正規化することによって取得される。
【数6】
【0074】
次に、この形状因子は、0(純粋に正弦)と1(非常にM形)との間で変動するように制限される。
【0075】
図8で示されるように、典型的なM形息の場合、上記の計算は次の結果を与える。
F1=4.6082
F2=2.6538
形状指数=0.50である。これは、単に約0.2のM形指数を有する典型的な非流量制限息と対比されてもよい。
【0076】
本発明は特定の実施形態を参照して説明されたが、この実施形態は、本発明の原理の適用を例証するだけであることを理解すべきである。したがって、本発明の例証的実施形態で多くの修正が行われてもよく、本発明の趣旨及び範囲から逸脱することなく他の配列が考え出されてもよいことを理解すべきである。例えば、本発明の好ましい実施形態は、波形を特定の解析切片へ分割し、中心値に専念したが、他の分割及び中心外領域が、同じように適用されてもよい。
【符号の説明】
【0077】
10…呼吸装置、12…マスク、14…送風機、16…可撓管、18…モータ、20…サーボコントローラ、22…空気出口、24…制御回路、26…排気口、28…流量限定要素、30…管、32…マスク圧力トランスデューサ、33…管、34…微分圧力トランスデューサ、36…増幅器、38…増幅器、40…フィルタ、42…変換器、44…マイクロプロセッサ。
【特許請求の範囲】
【請求項1】
加圧された呼吸可能な空気を患者へ選択的に供給するようになっている空気源と、
前記患者からの呼吸気流を感知し、気流を示す気流信号を生成する流量検出機器と、
前記流量検出機器へ結合され、前記患者の気道の部分閉塞を検出する方法を実現する閉塞検出器と、
前記流量検出機器へ結合され、前記空気源の動作を制御し、前記部分閉塞を示す閉塞信号を受け取り、前記閉塞信号に応答して前記空気源の動作を変更するように配列されたコントローラと
を備え、
前記方法が、
前記患者からの前記呼吸気流を測定するステップと、
呼吸気流の吸息部分を検出するステップと、
前記吸息部分を整形して、呼息休止を除去するステップと、
派生物の効果を正規化するステップと、
吸息流量を参照値へ尺度変更するステップと、
吸息気流の中心部分の平均偏差を計算するステップと、
前記平均偏差から平坦化指数を計算するステップと、
移動平均フィルタを用いて前記平坦化指数をフィルタリングするステップと
を含むものである、装置。
【請求項2】
正の前記閉塞信号に応答して、前記患者へ配送された前記呼吸可能な気体の圧力をコントローラが増加する、請求項1に記載の装置。
【請求項3】
睡眠障害を有する患者を監視及び/又は治療する装置であって、
前記患者の呼吸を感知して、対応する流量信号を生成する流量検出機器と、
前記流量検出機器へ結合され、前記患者の気道の部分閉塞を検出する方法を実現するようになっている閉塞検出器と
を備え、
前記方法が、
前記患者からの呼吸気流を測定するステップと、
呼吸気流の吸息部分を検出するステップと、
吸息部分を整形して、呼息休止を除去するステップと、
派生物の効果を正規化するステップと、
吸息流量を参照値へ尺度変更するステップと、
吸息気流の中心部分の平均偏差を計算するステップと、
前記平均偏差から平坦化指数を計算するステップと、
移動平均フィルタを用いて前記平坦化指数をフィルタリングするステップと、
を含むものであり、
前記閉塞検出器が信号生成器を含み、前記信号生成器が前記平坦化指数に基づいて気道閉塞を示す信号を生成する、装置。
【請求項4】
睡眠障害を有する患者を治療する装置であって、
マスクと、
前記マスクを介して、加圧されて呼吸可能な空気を、患者へ選択的に供給する気体源と、
気流を感知し、呼吸を示す流量信号を生成する流量検出機器と、
流量検出機器へ結合され、患者の気道の部分閉塞を検出する方法を実現するようになっている閉塞検出器と、
閉塞信号を受け取り、それに応答して気体源を活性化する指令を生成するコントローラと
を備え、
前記方法が、
患者からの呼吸気流を測定するステップと、
呼吸気流の吸息部分を検出するステップと、
吸息部分を整形して、呼息休止を除去するステップと、
派生物の効果を正規化するステップと、
吸息流量を参照値へ尺度変更するステップと、
吸息気流の中間部分の平均偏差を計算するステップと、
平均偏差から平坦化指数を計算するステップと、
移動平均フィルタを用いて平坦化指数をフィルタリングするステップと
を含むものである、装置。
【請求項5】
患者の気道における部分閉塞を検出する方法であって、
前記患者からの呼吸気流を測定するステップと、
呼吸気流の吸息部分を検出するステップと、
前記吸息部分を整形して、呼息休止を除去するステップと、
派生物の効果を正規化するステップと、
吸息流量を参照値へ尺度変更するステップと、
吸息気流の中心部分の平均偏差を計算するステップと、
前記平均偏差から平坦化指数を計算するステップと、
移動平均フィルタを用いて前記平坦化指数をフィルタリングするステップと
を含む方法。
【請求項6】
息における吸息半サイクル及び呼息半サイクルを検出する方法であって、
吸息のスタートを検出するステップと、
暫定的に、前記吸息のスタートを、吸息気流が所定の閾値を超過した時間とするステップと、
全容量が所定の値へ到達する前に、流量がゼロよりも下へ再び降下するならば、前記吸息のスタートを拒絶するステップと、
暫定的に、呼息のスタートを、呼息気流がゼロよりも下へ降下した時間とするステップと、
全呼息容量が所定値へ到達する前に、気流が吸息方向で所定値よりも上へ進むならば、前記呼息のスタートを拒絶するステップと
を含む方法。
【請求項7】
前記吸息半サイクルに含まれた呼息終期休止を整形するステップを更に含む、請求項6に記載の方法。
【請求項8】
前記流量がピーク吸息流量の所定の百分率へ最初に到達した時間を突き止める工程と、
前記流量がピークの第2の所定の百分率へ最後に到達した時間を逆方向に探索する工程と、
逆方向に外挿して、前記流量がゼロになるべき時間を発見する工程と
によって、前記吸息がスタートした最も早い時間を発見するステップを更に含む、請求項6に記載の方法。
【請求項9】
(a)波を同じ低域フィルタへ2回通過させる工程と、
(b)1回目にフィルタリングされた前記波から2回目にフィルタリングされた前記波を減じて、フィルタ効果の一次近似値を与える工程と、
(c)この差分を元の前記波へ加える工程と
によって、流量・時間曲線に対する前記低域フィルタの近似効果を逆にするステップを更に含む、請求項6に記載の方法。
【請求項10】
前記吸息流量・時間曲線を単位長さ及び単位平均高さへ尺度変更する工程によって、行き過ぎの効果を正規化するステップを更に含む、請求項6に記載の方法。
【請求項11】
前記波の中間部分について、参照振幅(M)からの、吸息波の平均偏差を計算するステップを更に含む、請求項6に記載の方法。
【請求項12】
前記中間部分は吸い込み波の1/4であって中心にあり、前記平均偏差は、次式
【数1】
によって前記平均偏差を決定するステップを更に含む、請求項6に記載の方法。
【請求項13】
次式
【数2】
によって平坦化指数(FI)を決定するステップを更に含む、請求項12に記載の方法。
【請求項14】
複数息点別移動平均流量・時間曲線を更新するステップを更に含む、請求項6に記載の方法。
【請求項15】
前記波の前記中間部分におけるピーク流量を推定する工程と、
前記ピーク流量を超過する部分の外側にある各々の点を前記ピーク流量に再設定する工程と
によって、前記行き過ぎの影響を低減するステップを更に含む、請求項6に記載の方法。
【請求項16】
外側部分で前記ピーク流量よりも大きい標本がなくなるまでプロセスを継続する工程によって、前記行き過ぎの影響を低減するステップ含む、請求項15に記載の方法。
【請求項17】
前記波をn個の部分に分割し、各々の部分について平均振幅を計算するステップと、
どの種類の前記波をパターンが示すかを決定するステップと、
前記行き過ぎが示されるならば、平坦化を低としてマークするステップと
を更に含む、請求項6に記載の方法。
【請求項18】
前記波の中間半分においてn個の前記標本ごとに前記平坦化の推定値を計算するステップと、平坦化指数を、全ての標本順列について取得された最低値に対応する値としてマークするステップと
を更に含む、請求項6に記載の方法。
【請求項19】
前記吸息波を特徴ベクトル及び直交する基底ベクトル行列対へ分解する工程と、
時間区間を正規化して、前記吸息がゼロで始まってBラジアンで終わるようにする工程と、
基底行列の疑似逆を発見する工程と、
該疑似逆に吸息波形を乗じて因子を発見する工程と
によって、吸息波パターンがM形を有するかどうかを決定するステップを更に含む、請求項6に記載の方法。
【請求項20】
多くの患者について線形空間をマップし、個々の前記患者を表す点が落ちる集団を記録するステップと、
M集団中心からのユークリッド距離測定によって、前記息が前記M形であるかどうかを決定するステップと
を更に含む、請求項19に記載の方法。
【請求項1】
加圧された呼吸可能な空気を患者へ選択的に供給するようになっている空気源と、
前記患者からの呼吸気流を感知し、気流を示す気流信号を生成する流量検出機器と、
前記流量検出機器へ結合され、前記患者の気道の部分閉塞を検出する方法を実現する閉塞検出器と、
前記流量検出機器へ結合され、前記空気源の動作を制御し、前記部分閉塞を示す閉塞信号を受け取り、前記閉塞信号に応答して前記空気源の動作を変更するように配列されたコントローラと
を備え、
前記方法が、
前記患者からの前記呼吸気流を測定するステップと、
呼吸気流の吸息部分を検出するステップと、
前記吸息部分を整形して、呼息休止を除去するステップと、
派生物の効果を正規化するステップと、
吸息流量を参照値へ尺度変更するステップと、
吸息気流の中心部分の平均偏差を計算するステップと、
前記平均偏差から平坦化指数を計算するステップと、
移動平均フィルタを用いて前記平坦化指数をフィルタリングするステップと
を含むものである、装置。
【請求項2】
正の前記閉塞信号に応答して、前記患者へ配送された前記呼吸可能な気体の圧力をコントローラが増加する、請求項1に記載の装置。
【請求項3】
睡眠障害を有する患者を監視及び/又は治療する装置であって、
前記患者の呼吸を感知して、対応する流量信号を生成する流量検出機器と、
前記流量検出機器へ結合され、前記患者の気道の部分閉塞を検出する方法を実現するようになっている閉塞検出器と
を備え、
前記方法が、
前記患者からの呼吸気流を測定するステップと、
呼吸気流の吸息部分を検出するステップと、
吸息部分を整形して、呼息休止を除去するステップと、
派生物の効果を正規化するステップと、
吸息流量を参照値へ尺度変更するステップと、
吸息気流の中心部分の平均偏差を計算するステップと、
前記平均偏差から平坦化指数を計算するステップと、
移動平均フィルタを用いて前記平坦化指数をフィルタリングするステップと、
を含むものであり、
前記閉塞検出器が信号生成器を含み、前記信号生成器が前記平坦化指数に基づいて気道閉塞を示す信号を生成する、装置。
【請求項4】
睡眠障害を有する患者を治療する装置であって、
マスクと、
前記マスクを介して、加圧されて呼吸可能な空気を、患者へ選択的に供給する気体源と、
気流を感知し、呼吸を示す流量信号を生成する流量検出機器と、
流量検出機器へ結合され、患者の気道の部分閉塞を検出する方法を実現するようになっている閉塞検出器と、
閉塞信号を受け取り、それに応答して気体源を活性化する指令を生成するコントローラと
を備え、
前記方法が、
患者からの呼吸気流を測定するステップと、
呼吸気流の吸息部分を検出するステップと、
吸息部分を整形して、呼息休止を除去するステップと、
派生物の効果を正規化するステップと、
吸息流量を参照値へ尺度変更するステップと、
吸息気流の中間部分の平均偏差を計算するステップと、
平均偏差から平坦化指数を計算するステップと、
移動平均フィルタを用いて平坦化指数をフィルタリングするステップと
を含むものである、装置。
【請求項5】
患者の気道における部分閉塞を検出する方法であって、
前記患者からの呼吸気流を測定するステップと、
呼吸気流の吸息部分を検出するステップと、
前記吸息部分を整形して、呼息休止を除去するステップと、
派生物の効果を正規化するステップと、
吸息流量を参照値へ尺度変更するステップと、
吸息気流の中心部分の平均偏差を計算するステップと、
前記平均偏差から平坦化指数を計算するステップと、
移動平均フィルタを用いて前記平坦化指数をフィルタリングするステップと
を含む方法。
【請求項6】
息における吸息半サイクル及び呼息半サイクルを検出する方法であって、
吸息のスタートを検出するステップと、
暫定的に、前記吸息のスタートを、吸息気流が所定の閾値を超過した時間とするステップと、
全容量が所定の値へ到達する前に、流量がゼロよりも下へ再び降下するならば、前記吸息のスタートを拒絶するステップと、
暫定的に、呼息のスタートを、呼息気流がゼロよりも下へ降下した時間とするステップと、
全呼息容量が所定値へ到達する前に、気流が吸息方向で所定値よりも上へ進むならば、前記呼息のスタートを拒絶するステップと
を含む方法。
【請求項7】
前記吸息半サイクルに含まれた呼息終期休止を整形するステップを更に含む、請求項6に記載の方法。
【請求項8】
前記流量がピーク吸息流量の所定の百分率へ最初に到達した時間を突き止める工程と、
前記流量がピークの第2の所定の百分率へ最後に到達した時間を逆方向に探索する工程と、
逆方向に外挿して、前記流量がゼロになるべき時間を発見する工程と
によって、前記吸息がスタートした最も早い時間を発見するステップを更に含む、請求項6に記載の方法。
【請求項9】
(a)波を同じ低域フィルタへ2回通過させる工程と、
(b)1回目にフィルタリングされた前記波から2回目にフィルタリングされた前記波を減じて、フィルタ効果の一次近似値を与える工程と、
(c)この差分を元の前記波へ加える工程と
によって、流量・時間曲線に対する前記低域フィルタの近似効果を逆にするステップを更に含む、請求項6に記載の方法。
【請求項10】
前記吸息流量・時間曲線を単位長さ及び単位平均高さへ尺度変更する工程によって、行き過ぎの効果を正規化するステップを更に含む、請求項6に記載の方法。
【請求項11】
前記波の中間部分について、参照振幅(M)からの、吸息波の平均偏差を計算するステップを更に含む、請求項6に記載の方法。
【請求項12】
前記中間部分は吸い込み波の1/4であって中心にあり、前記平均偏差は、次式
【数1】
によって前記平均偏差を決定するステップを更に含む、請求項6に記載の方法。
【請求項13】
次式
【数2】
によって平坦化指数(FI)を決定するステップを更に含む、請求項12に記載の方法。
【請求項14】
複数息点別移動平均流量・時間曲線を更新するステップを更に含む、請求項6に記載の方法。
【請求項15】
前記波の前記中間部分におけるピーク流量を推定する工程と、
前記ピーク流量を超過する部分の外側にある各々の点を前記ピーク流量に再設定する工程と
によって、前記行き過ぎの影響を低減するステップを更に含む、請求項6に記載の方法。
【請求項16】
外側部分で前記ピーク流量よりも大きい標本がなくなるまでプロセスを継続する工程によって、前記行き過ぎの影響を低減するステップ含む、請求項15に記載の方法。
【請求項17】
前記波をn個の部分に分割し、各々の部分について平均振幅を計算するステップと、
どの種類の前記波をパターンが示すかを決定するステップと、
前記行き過ぎが示されるならば、平坦化を低としてマークするステップと
を更に含む、請求項6に記載の方法。
【請求項18】
前記波の中間半分においてn個の前記標本ごとに前記平坦化の推定値を計算するステップと、平坦化指数を、全ての標本順列について取得された最低値に対応する値としてマークするステップと
を更に含む、請求項6に記載の方法。
【請求項19】
前記吸息波を特徴ベクトル及び直交する基底ベクトル行列対へ分解する工程と、
時間区間を正規化して、前記吸息がゼロで始まってBラジアンで終わるようにする工程と、
基底行列の疑似逆を発見する工程と、
該疑似逆に吸息波形を乗じて因子を発見する工程と
によって、吸息波パターンがM形を有するかどうかを決定するステップを更に含む、請求項6に記載の方法。
【請求項20】
多くの患者について線形空間をマップし、個々の前記患者を表す点が落ちる集団を記録するステップと、
M集団中心からのユークリッド距離測定によって、前記息が前記M形であるかどうかを決定するステップと
を更に含む、請求項19に記載の方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2012−176252(P2012−176252A)
【公開日】平成24年9月13日(2012.9.13)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−107924(P2012−107924)
【出願日】平成24年5月9日(2012.5.9)
【分割の表示】特願2008−557549(P2008−557549)の分割
【原出願日】平成19年3月6日(2007.3.6)
【出願人】(500046450)レスメド・リミテッド (192)
【氏名又は名称原語表記】RESMED LTD
【公開日】平成24年9月13日(2012.9.13)
【国際特許分類】
【出願番号】特願2012−107924(P2012−107924)
【出願日】平成24年5月9日(2012.5.9)
【分割の表示】特願2008−557549(P2008−557549)の分割
【原出願日】平成19年3月6日(2007.3.6)
【出願人】(500046450)レスメド・リミテッド (192)
【氏名又は名称原語表記】RESMED LTD
[ Back to top ]