
開閉翼作動感知装置および開閉翼作動感知方法
【課題】センサー等の電気的感知手段を用いることなく、確実に攪拌翼の開閉状況を把握できる簡易な開閉翼作動感知装置を提供する。
【解決手段】開閉翼作動感知装置7は、開閉式攪拌翼43と吐出口47と該吐出口に通ずる流路とを有する攪拌装置において用いられる。この感知装置は、吐出口又は流路を開閉するための弁体(遮蔽板)71を有している。該弁体は、攪拌翼43の開放動作に連動するように設けられており、攪拌翼が閉翼位置にあるときに閉弁状態にあり、攪拌翼が開翼位置にあるときに開弁状態にある。この感知装置を用いて攪拌翼43の開閉状況を感知するにあたっては、攪拌翼を閉翼位置から開翼位置へ変位させることによって、該攪拌翼に連動する弁体71を開弁させ、吐出口47から流体を吐出できるようにする。次いで、流路を介して吐出口47から流体を吐出させ、その際、流体の吐出圧力及び流量に基づいて攪拌翼の開閉状況を感知する。
【解決手段】開閉翼作動感知装置7は、開閉式攪拌翼43と吐出口47と該吐出口に通ずる流路とを有する攪拌装置において用いられる。この感知装置は、吐出口又は流路を開閉するための弁体(遮蔽板)71を有している。該弁体は、攪拌翼43の開放動作に連動するように設けられており、攪拌翼が閉翼位置にあるときに閉弁状態にあり、攪拌翼が開翼位置にあるときに開弁状態にある。この感知装置を用いて攪拌翼43の開閉状況を感知するにあたっては、攪拌翼を閉翼位置から開翼位置へ変位させることによって、該攪拌翼に連動する弁体71を開弁させ、吐出口47から流体を吐出できるようにする。次いで、流路を介して吐出口47から流体を吐出させ、その際、流体の吐出圧力及び流量に基づいて攪拌翼の開閉状況を感知する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、攪拌装置に設けられた開閉式攪拌翼の地盤内での開閉状況を感知するための装置に関する。
【背景技術】
【0002】
従来より地盤改良や基礎杭、または土壌浄化などの土木技術分野では、攪拌ロッドの外周に攪拌翼を備えた攪拌装置を、所定深度まで地盤に貫入して、地盤中で改良材や浄化材を吐出し、攪拌ロッドを回転させて攪拌翼により土砂と攪拌混合することが行われている。しかしながら、対象地盤の上部に硬質層や攪乱したくない地盤が存在すると、攪拌翼が障害となって攪拌装置の貫入が困難となったり、不要に地盤を乱したり、攪拌の影響を浅層部に広げてしまうという問題があった。そこで、近年では、目標の深度に至るまでは攪拌翼を縮径させておき、目標の深度に至ると拡径させることができる開閉式攪拌翼を備えた攪拌装置が提案されている。このような攪拌翼の開閉状況は、従来では、特許文献1に開示されるようなセンサー、或いは、近接スイッチや傾斜計を設けることによって把握されていた。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−82101号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、攪拌翼の開閉状況を感知するためのセンサー、近接スイッチ、傾斜計等の電気的感知手段は、開閉状況の信号を送信するための通信ケーブルなどの付帯設備を必要とするため、攪拌装置の構造が複雑で大掛かりになり、また、製造コストやメンテナンスコストが高くなるといった問題がある。さらに、信号伝送用の通信ケーブルなどを必要とする従来の感知装置では、攪拌ロッドに信号ライン専用の経路を設ける必要があるため、その分、攪拌ロッドの径サイズが大きくなって貫入抵抗が増し、地盤の固さによっては施工ができなくなるといった問題がある。
【0005】
上述した従来技術の問題点に鑑み、本発明の目的は、センサー等の電気的感知手段を用いることのない開閉翼作動感知装置であって、確実に攪拌翼の開閉状況を把握することができる簡易な開閉翼作動感知装置を提供することにある。
【課題を解決するための手段】
【0006】
上述した本発明の目的は、開閉式攪拌翼と、流体吐出口と、前記吐出口に通ずる流路と、を有する攪拌装置において用いられる感知装置であって、前記攪拌翼の開放動作(又は開閉動作)に機械的に連動するように設けられた、前記吐出口又は流路を開閉するための弁体を有する開閉翼作動感知装置によって達成される。
【0007】
かかる開閉翼作動感知装置において、前記攪拌翼に連動する弁体は、前記攪拌翼が閉翼位置にあるときに閉弁状態にあり、前記攪拌翼が開翼位置にあるときに開弁状態にある。
【0008】
上記開閉翼作動感知装置を用いた攪拌翼の開閉状況の感知方法では、攪拌翼を閉翼位置から開翼位置へ向けて変位させることによって、該攪拌翼に連動する弁体を開弁させて、吐出口から流体を吐出できるようにし、次いで、流路を介して前記吐出口から流体を吐出させ、その際、流体の吐出圧力及び/又は流量に基づいて攪拌翼の開閉状況を感知するようにする。
【発明の効果】
【0009】
本発明の開閉翼作動感知装置によれば、攪拌翼の開放動作に連動して、流路又は吐出口に設けられた弁体を開弁させるようになっている。したがって、流体の吐出圧力及び流量の少なくとも何れか一方を計測することによって弁体の開弁度合いを求めることができ、さらに、その開弁度合いから攪拌翼の開閉状況を確実に把握することができる。
【0010】
しかも、本発明の開閉翼作動感知装置は、機械的な構造体だけで構成され、電気的手段を必要としない。したがって、攪拌ロッドにセンサー、発信機、通信ケーブルなどを設ける必要がないので、攪拌装置を単純でシンプルな構造にでき、攪拌ロッドの径サイズをより小さくすることが可能になる。これにより、攪拌装置をより低コストで製造することができ、また、攪拌ロッドを細く設計できるので貫入抵抗を軽減することが可能になる。
【0011】
また、攪拌ロッドを細くすることができるため、閉翼位置の状態の時の径も小さくすることができる。これにより、拡径比(開状態での攪拌径/閉状態での削孔径)が従来よりも大きくすることができるため、対象深度領域上部の地盤の乱れを最小限にすることができる。これは、地盤改良として利用する場合は上部層の強度低下を防ぐことができ、土壌浄化として利用する場合は攪拌の影響による汚染を防ぐことができる。
【0012】
また、通信ケーブルなどを必要としない本発明の開閉翼作動感知装置は、攪拌装置のロッド構造に影響を及ぼさないものであるから、攪拌装置のロッドを単純でシンプルに設計する必要がある場合に特に有効である。
【0013】
また、本発明の開閉翼作動感知装置は、開閉式攪拌翼と流路を備えた攪拌装置であれば、既存の攪拌装置に対しロッドを改修することなく後付けすることも可能である。したがって、本発明は、既存の開閉式攪拌装置にも広く適用することが可能である。
【図面の簡単な説明】
【0014】
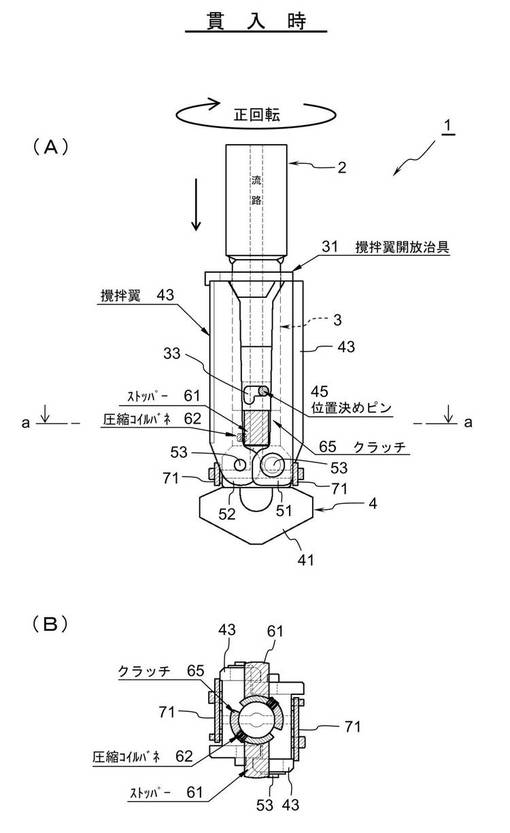
【図1】開閉翼作動感知装置を備えた攪拌装置の貫入時の状態を示しており、図1(A)は正面図であり、図1(B)はa−a線に沿った断面図である。
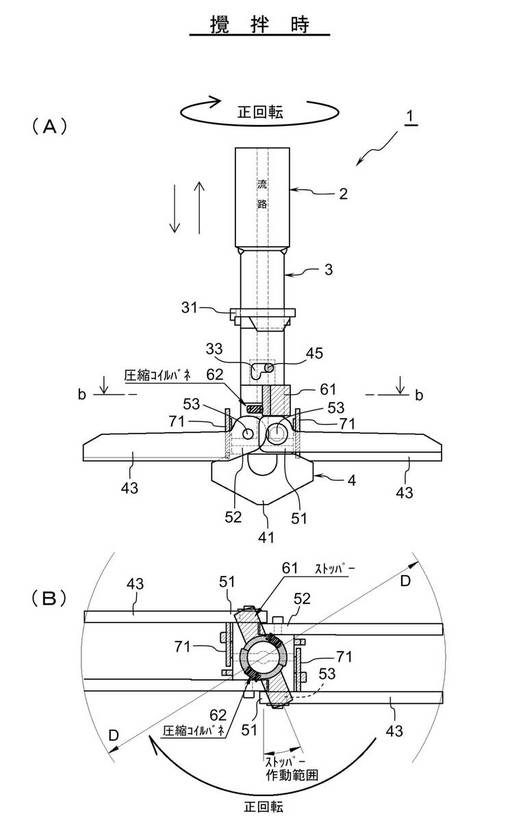
【図2】開閉翼作動感知装置を備えた攪拌装置の攪拌時の状態を示しており、図2(A)は正面図であり、図2(B)はb−b線に沿った断面図である。
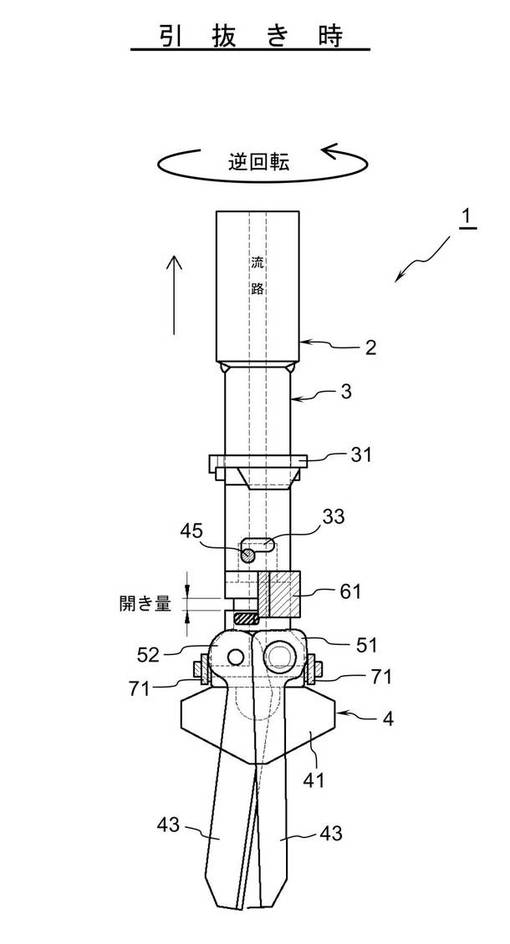
【図3】開閉翼作動感知装置を備えた攪拌装置の引抜き時の状態を示している。
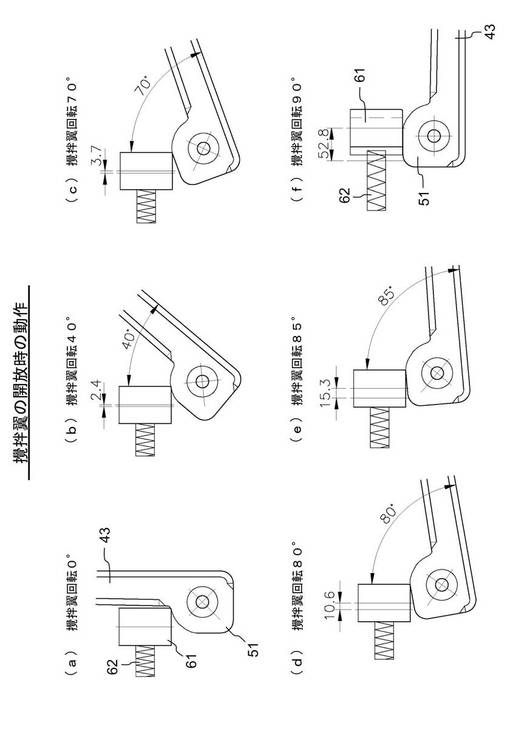
【図4】攪拌装置の攪拌翼を閉翼位置(図1)から開翼位置(図2)に変位させる際の動作を示す図である。
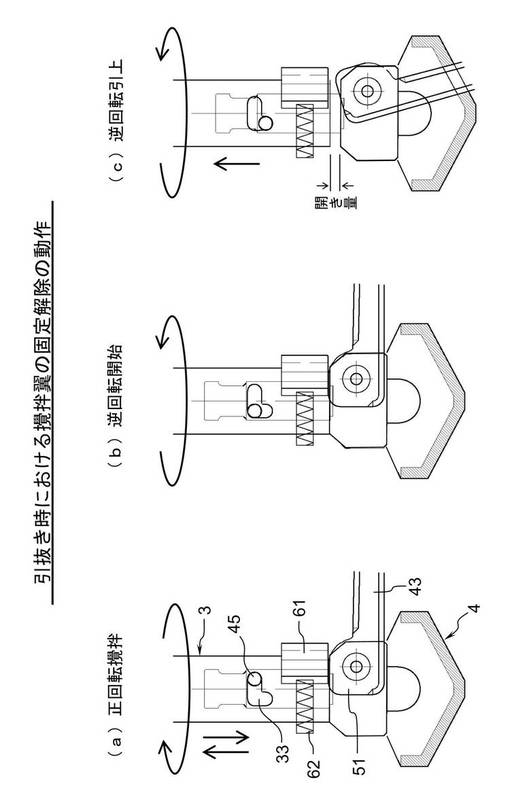
【図5】攪拌装置の攪拌翼を開翼位置(図2)から引抜位置(図3)に変位させる際の動作を示す図である。
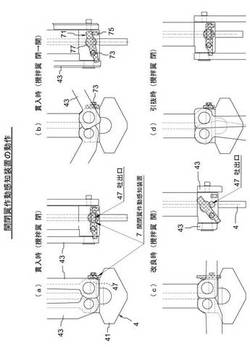
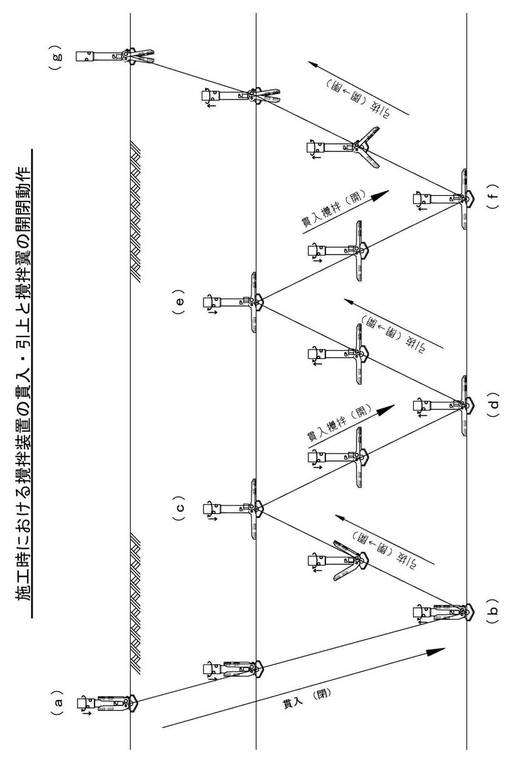
【図6】攪拌装置を用いて施工する際における、攪拌翼の開閉動作を示す概念図である。
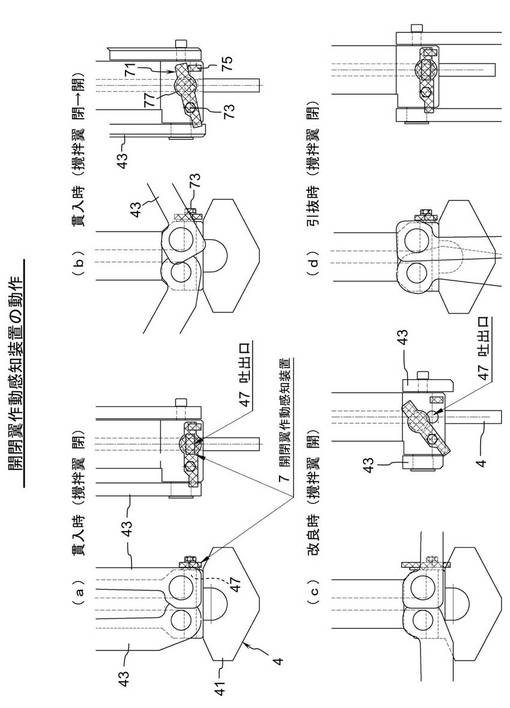
【図7】本発明に係る開閉翼作動感知装置の構成および作用を示す図である。
【図8】第1の変形例に係る開閉翼作動感知装置の構成および作用を示す図である。
【図9】第2の変形例に係る開閉翼作動感知装置の構成および作用を示す図である。
【発明を実施するための形態】
【0015】
以下、添付図面に基づいて、本発明に係る開閉翼作動感知装置の実施形態について説明する。
【0016】
(攪拌装置の構成)
はじめに、図1〜図3に基づいて開閉翼作動感知装置が設けられる攪拌装置の一例について説明する。
【0017】
攪拌装置1は、先端に掘削ビット41を備える攪拌ロッド2と、この攪拌ロッドの先端側に設けられた一対の開閉式攪拌翼43と、これらの攪拌翼の開放動作を補助する攪拌翼開放治具31と、攪拌翼43を所定の開放位置で固定するためのストッパー61と、このストッパーによる固定状態を解除するための解除機構(ガイド孔33,位置決めピン45)と、後述する開閉翼作動感知装置の要部を構成する吐出口遮蔽板(弁体)71とを有している。
【0018】
攪拌ロッド2はロッド本体3と掘削攪拌体4から構成されている。ロッド本体3と掘削攪拌体4は、それぞれ内部に流体搬送用の流路を有しており、両者の流路は連通している。掘削攪拌体4には、前記流路を介して搬送された流体を地中へ吐出するための流体吐出口47が設けられている(図7参照)。吐出口から吐出された流体は、旋回する攪拌翼43によって周辺土壌と攪拌される。なお、地中に吐出される流体は特に限定されず、土壌浄化材、地盤改良材、水など様々な種類の流体を採用することができる。また、これらの流体の態様は特に限定されず、流動可能である限り気体、液体、粉粒体など様々な態様で使用することができる。
【0019】
ロッド本体3の下端側は筒状に形成されており、その内側には、掘削攪拌体4の上部にある軸部分が挿着してある。ロッド本体3には略L字状のガイド孔33が形成してあり、掘削攪拌体4の軸部分には位置決めピン45が固設してある。掘削攪拌体4は、位置決めピン45がガイド孔33に沿って移動できる範囲内で、ロッド本体3に対し相対的に変位することが可能である。掘削攪拌体4の先端側には掘削ビット41が設けられ、該掘削ビットの上部において一対の攪拌翼43が開閉可能に設けられている。
【0020】
一対の攪拌翼43は、掘削攪拌体4の軸部分を挟んで対向するように設けられている。攪拌翼43は、例えば梯子状に形成され、その基端部に回転体51,52を有している(図2(B)参照)。攪拌翼43の回転体51,52は連結軸53によって攪拌ロッド2の掘削攪拌体4に連結されており、各攪拌翼は回転体51,52を基点として上下方向で自在にスイング可能である。各攪拌翼の基部にある連結軸53は、該攪拌翼と一体的に回動するように設けられている。
【0021】
上記構成の攪拌翼43は、地盤への貫入時には、その先端を上に向け該攪拌翼が上に閉じた状態になる「閉翼位置」にセットされる(図1)。この閉翼位置では、攪拌翼43はロッド本体3と外観上一体となって全体として一つの柱状体を構成している。
攪拌時には、攪拌翼43を閉翼位置から下方へスイングさせて開放し(図1→図2)、攪拌径Dが貫入時の削孔径に比して大となる「開翼位置」にセットされ、ストッパー61により固定される。図示する実施形態では、一対の攪拌翼43は90°スイングして相反する方向(水平方向)に延出しており、その結果、攪拌翼先端の旋回軌跡である攪拌径D(図2)が最大となる。
引抜時には、ストッパー61による攪拌翼43の固定状態を解除して、該攪拌翼を垂れ下がった「引抜位置」にスイングさせ下に閉じた状態にする(図3)。
【0022】
攪拌翼43の基端部にある一方の回転体51には、平坦な係合面が形成されている。この係合面は、攪拌翼43が開翼位置(図2)にあるときに、ストッパー61の平坦な底面側と当接する。このようにストッパー61と回転体51の平坦面同士が当接することにより、攪拌翼43のスイングが妨げられるので、攪拌翼が図2に示す開翼位置に固定される。
【0023】
攪拌翼開放治具31は、ロッド本体3の外周面に沿って上下方向に摺動自在に設けられている。この攪拌翼開放治具31は、攪拌ロッド2を引き上げることで周辺地盤から受ける抵抗により下方に摺動し、攪拌翼43を付勢する役割を担っている。攪拌翼開放治具31による下方への付勢がきっかけとなって、攪拌翼43が閉翼位置(図1)から開翼位置(図2)へスイングし始める。
【0024】
ストッパー61は、攪拌ロッド2のロッド本体3の下端部に設けられ、攪拌翼43の回転体51の上方に位置している。このストッパー61は、図1(B)、図2(B)に示すように相反する方向に水平に延出するように2つ設けられ、各ストッパーは、ロッド本体3に対し回転可能に設けられた回転部材に対して固設されている。攪拌翼43が図2に示す開翼位置にあるときには、ストッパー61の底面側が攪拌翼43の回転体51の平坦な係合面と当接して、該攪拌翼を開翼位置に固定する。
【0025】
上記構成のストッパー61は、圧縮コイルバネ62によって付勢されて、その基端にある回転部材のスライド回転を伴いながら旋回することが可能である。ただし、クラッチ65(ストッパーの回転止め部材)が設けられているため、所定の角度範囲内でしか旋回できない。
図1に示す閉翼位置では、ストッパー61は、圧縮コイルバネ62により付勢されているが、攪拌翼43の羽根が邪魔しているため、旋回することはない。
図1の閉翼位置から図2の開翼位置へ変位する過程では、攪拌翼43の開放に伴ってその羽根がストッパー61から遠ざかるため、ストッパー61は圧縮コイルバネ62により付勢されて徐々に旋回する。
【0026】
ストッパー61による攪拌翼43の固定状態を解除するための解除機構は、ロッド本体3の外周面に形成されたガイド孔33と、このガイド孔に沿って移動可能な位置決めピン45とから構成される。位置決めピン45は、掘削攪拌体4の軸部分に固設されている。位置決めピン45を案内するガイド孔33は、横孔と縦孔が連なって形成された略L字状の形態を有している。ロッド本体3のL字状ガイド孔33と、掘削攪拌体4の位置決めピン45との係合関係により、掘削攪拌体4はロッド本体3に対し所定角度の範囲内で相対回転可能であり、また、所定長さだけ相対移動可能である。
【0027】
(攪拌翼の開閉動作)
次に、施工時における攪拌翼43の開閉動作について、図6に示す一連の工程を参照しながら説明する。なお、攪拌装置1の具体的構成については必要に応じて図1〜図3を参照し、開放した攪拌翼43を固定するための動作については図4を参照し、開放した攪拌翼43の固定状態を解除するための動作については図5を参照する。
【0028】
図6(a)に示す貫入開始前には、図1に示すように攪拌翼43の先端を上に向けて該攪拌翼が上に閉じた状態になる「閉翼位置」にセットするとともに、攪拌翼開放治具31が攪拌翼43の先端の上部に位置するように位置決めする。次に、正転(右回転)させながら攪拌装置1の貫入を開始する。
【0029】
攪拌装置1を貫入している間は(図6(a)→(b))、攪拌翼43は図1に示す閉翼状態を維持し、攪拌翼43がロッド本体3と外観上一体となって全体として1つの柱状体を構成する。そのため、貫入時において攪拌翼43が貫入の妨げとなることはない。
【0030】
貫入を続けて目標深度まで達したら(図6(b))、正転させながら攪拌装置1を所定長さ引き上げる。すると、攪拌翼43の先端上部にある攪拌翼開放治具31が、攪拌装置1の引き上げに伴う土砂の抵抗を受けて下方に摺動し、閉翼位置から開翼位置へスイングするように攪拌翼を付勢する。この攪拌翼開放治具31による付勢がきっかけとなって、攪拌翼43が開脚するようにスイングし始める(図6(b)→(c))。以後は、攪拌翼43が直接、引き上げに伴う土砂の抵抗を受けて、周辺地盤に突き刺さりながら下方にスイングする(図6(c))。一方、攪拌翼43の開脚に伴って、図4の(a)から(f)に示すように、ストッパー61が圧縮コイルバネ62によって付勢されて所定角度だけ旋回する。
【0031】
そして、攪拌翼43が90°スイングして攪拌径が最大となる位置(水平位置)に至ると、図4(f)に示すように、旋回したストッパー61の平坦な底面に対し、攪拌翼43の基部にある回転体51の平坦な係合面が当接して、回転体51の回転が妨げられる。これにより、各攪拌翼は図2の開翼位置に固定される(図6(c))。
以後は、攪拌装置1を正転させながら、所定深度領域での貫入と引上を必要サイクル繰り返して、旋回する攪拌翼43による攪拌を行う(図6(c)→(d)→(e)→(f))。
【0032】
図6(c)乃至(f)に示す攪拌工程を終えて攪拌装置1を地中から引き抜く際には、攪拌装置を逆転させる。すると、攪拌翼43や掘削ビット41を介して受けた周辺地盤の抵抗により、ロッド本体3の先端側に挿設した掘削攪拌体4が相対回転し始める。このとき、図5に示すように、掘削攪拌体4の位置決めピン45がロッド本体3のガイド孔33に沿って横方向に移動し、縦孔に至ると掘削攪拌体4は地盤の反力を受けてその位置にとどまり、ロッド本体3が引抜き力によって当該縦孔の長さ分だけ上昇する。その結果、図5(c)に示すように、ストッパー61が攪拌翼43の回転体51から所定長さ離れるので、該ストッパーによる攪拌翼の固定状態が解除される。
【0033】
そして、攪拌装置1を逆転させながら引き上げると(図6(f)→(g))、攪拌翼43が引き上げに伴う周辺地盤の抵抗を受け、図3に示すような垂れ下がった「引抜位置」にスイングして下向きに閉翼する。以降は、攪拌翼43が引き抜きの障害となることがなく、攪拌装置1を地盤から引き抜くことができる。
【0034】
(開閉翼作動感知装置の構成)
次に、図7に基づいて、本発明の開閉翼作動感知装置について説明する。
図7に示す実施形態において、開閉翼作動感知装置7は、シャッター式の弁体である吐出口遮蔽板71と、該遮蔽板を回転自在に軸支する回転軸73と、遮蔽板を閉弁状態に位置決めする位置決め部材75とを有している。
【0035】
遮蔽板71は、吐出口47を完全に閉塞できる略円形の閉塞部分77を有しており、遮蔽板71の先端側は位置決め部材75によって支えられ、基端側は攪拌翼43と干渉し得るようになっている。位置決め部材75は、遮蔽板71の閉塞部分77が吐出口47を閉塞する位置において該遮蔽板の先端側を下支えし、図7(a)に示す閉弁状態に位置決めする役割を担っている。回転軸73は、遮蔽板71の閉塞部分77と基端との間に位置している。図7(b)に示すように、遮蔽板71の基端側が攪拌翼43によって押し込まれると、該遮蔽板が回転して、吐出口47が開口し始める。
【0036】
(開閉翼作動感知装置の動作)
次に、図6に示す一連の工程における開閉翼作動感知装置の作用について、図7を参照しながら説明する。
【0037】
攪拌装置の貫入時(図6(a)→(b))には、図7(a)に示すように、遮蔽板71は吐出口47を閉塞する「閉弁状態」に位置している。
攪拌装置が目標深度に達して攪拌翼43を開放させ始めると(図6(b)→(c))、スイングする攪拌翼43が遮蔽板71の基端側を押し込んで、図7(b)に示すように遮蔽板71を徐々に回転させる。
攪拌翼43が90°スイングして水平位置に至ると(図6(c))、図7(c)に示すように遮蔽板71は吐出口47を完全に開口させる「開弁状態」に至る。
攪拌装置を引き抜く際に攪拌翼43を下方に閉じさせると(図6(f)→(g))、その過程で攪拌翼43は遮蔽板71の基端部を通過し、該遮蔽板は自由に回転可能な状態に至る。そして、遮蔽板71は引上げに伴う土砂の抵抗を受け、図7(d)に示すように吐出口47を閉塞する「閉弁状態」に至る。
【0038】
(開閉翼の作動感知方法)
施工時において、攪拌翼43が水平位置(図6(c))に至ったか否かは、目視により確認することができない。そこで、攪拌翼43が水平位置に至ったと推測される場合には、攪拌ロッド内の流路を介して吐出口47から流体を吐出させ、その際、流体の吐出圧力及び流量に基づいて攪拌翼43の開閉状況を感知する。なお、吐出口47が完全に閉じている場合には、流体の吐出量がゼロとなって、吐出圧力が上昇する。一方、吐出口47が開いている場合には、遮蔽板71の開弁度合いに応じて、流体の吐出量が上昇し、吐出圧力が下がる。したがって、流体の吐出圧力及び流量を計測することで吐出口47の開口度合いを求めることができ、それに基づいて、攪拌翼43の開閉状況を把握することができる。
【0039】
攪拌翼43の開き具合が不完全であると判断された場合には、攪拌装置を引上げて攪拌翼をさらにスイングさせるようにする。一方、攪拌翼43が十分に開ききったと判断された場合には、攪拌装置を正転させながら攪拌作業を行う。
【0040】
上述した開閉翼作動感知装置は本発明の実施形態の一例であり、特許請求の範囲に記載された発明の範囲内で種々の改変が可能である。例えば、開閉翼作動感知装置について以下に述べるような変形例を採用することも可能である。
【0041】
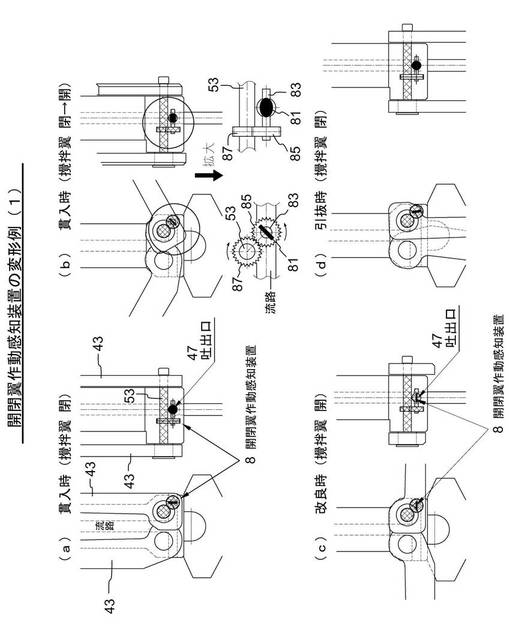
(開閉翼作動感知装置の第1の変形例)
図8に示す第1の変形例に係る開閉翼作動感知装置8は、流路の吐出口手前に設けられた回転式の円盤状の弁体81と、該弁体を保持する回転軸83と、該回転軸に一体的に設けられた歯車85と、攪拌翼43の連結軸53に一体的に設けられており前記歯車85と歯合する歯車87とを有している。
【0042】
攪拌装置の貫入時(図6(a)→(b))には、図8(a)に示すように、弁体81は流路を遮断する「閉弁状態」に位置している。
攪拌装置が目標深度に達して攪拌翼を開放させ始めると(図6(b)→(c))、攪拌翼43のスイングに伴って連結軸53が回動する。同時に、図8(b)に示すように、連結軸53の回動が、歯車87,85及び回転軸83を介して弁体81に伝達されるので、攪拌翼43のスイング動作に連動して弁体81が回転する。
攪拌翼43が90°スイングして水平位置に至ると(図6(c))、図8(c)に示すように弁体81は流路を完全に開放させる「開弁状態」に至る。
攪拌装置を引き抜く際に攪拌翼43を下方に閉じさせると(図6(f)→(g))、攪拌翼43のスイングに連動して再び弁体81が回転する。その結果、図8(d)に示すように、弁体81は流路を遮断する「閉弁状態」に至る。
【0043】
この一連の工程での攪拌翼43の開閉状況は、前述した感知方法と同様の方法で把握することができる。
【0044】
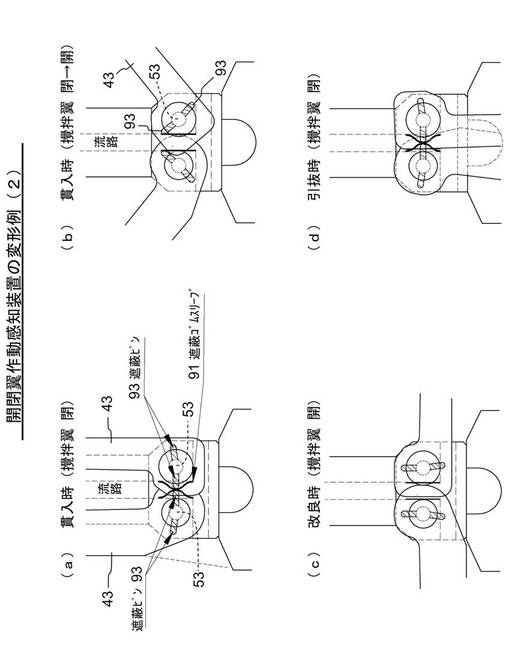
(開閉翼作動感知装置の第2の変形例)
図9に示す第2の変形例に係る開閉翼作動感知装置は、掘削攪拌体4内の流路の一部を形成する遮蔽ゴムスリーブ91と、各攪拌翼の連結軸53に立設された遮蔽ピン93と、を有している。
【0045】
ゴムホース状の弁体をなす遮蔽ゴムスリーブ91は、外力を受けたときに押しつぶれて変形するように構成され、変形している間流路を遮断(又は変形量に応じて流量を制限)する役割を担っている。各攪拌翼の連結軸53に立設された遮蔽ピン93は、流路を挟んで対向する遮蔽ピンと協動して、遮蔽ゴムスリーブ91を絞るように変形させる役割を担っている。
【0046】
攪拌装置の貫入時(図6(a)→(b))には、図9(a)に示すように、遮蔽ゴムスリーブ91は、流路を挟んで向かい合う遮蔽ピン93,93の先端部で押し挟まれて、流路を遮断する「閉弁状態」に変形している。
攪拌装置が目標深度に達して攪拌翼を開放させ始めると(図6(b)→(c))、攪拌翼43のスイングに伴って連結軸53が回動するので、図9(b)に示すように、攪拌翼43のスイング動作に連動して遮蔽ピン93が回動する。
攪拌翼43が90°スイングして水平位置に至ると(図6(c))、図9(c)に示すように、押しつぶしていた遮蔽ピン93が遮蔽ゴムスリーブ91から離れ、遮蔽ゴムスリーブ91は流路を完全に開放させる「開弁状態」に復帰する。
攪拌装置を引き抜く際に攪拌翼43を下方に閉じさせると(図6(f)→(g))、攪拌翼43のスイングに伴って再び遮蔽ピン93が回動する。その結果、図9(d)に示すように、遮蔽ゴムスリーブ91は、流路を挟んで向かい合う遮蔽ピン93,93の先端部で押し挟まれて、流路を遮断する「閉弁状態」に変形する。
【0047】
この一連の工程での攪拌翼43の開閉状況は、前述した感知方法と同様の方法で把握することができる。
【0048】
(攪拌装置の変形例)
上述した実施形態では、開閉翼作動感知装置の適用例として、油圧や押し棒などが不要な開閉翼を備えた攪拌装置を例示したが、本発明に係る開閉翼作動感知装置を適用可能な攪拌装置はこれに限定されない。
例えば、特開2003-035083号公報、特開2003-106082号公報、特開2005-315052号公報、特開2009-002082号公報に開示されるような、攪拌翼を開閉するための油圧シリンダ、攪拌翼を押し引きするための押し棒、リンク機構などを備えた攪拌装置にも適用可能である。
【0049】
(本発明に係る開閉翼作動感知装置の効果)
上述したように、本発明によれば、攪拌翼の開放動作に連動して、流路又は吐出口に設けられた弁体を開弁させるようになっている。したがって、流体の吐出圧力及び流量を計測することによって弁体の開弁度合いを求めることができ、さらに、その開弁度合いから攪拌翼の開閉状況を確実に把握することができる。
【0050】
しかも、本発明の開閉翼作動感知装置は、機械的な構造体だけで構成され、電気的手段を必要としない。したがって、攪拌ロッドにセンサー、発信機、通信ケーブルなどを設ける必要がないので、攪拌装置を単純でシンプルな構造にでき、攪拌ロッドの径サイズをより小さくすることが可能になる。これにより、攪拌装置をより低コストで製造することができ、また、攪拌ロッドを細く設計できるので貫入抵抗を軽減することが可能になる。
【0051】
また、攪拌ロッドを細くすることができるため、閉翼位置の状態の時の径も小さくすることができる。これにより、拡径比(開状態での攪拌径/閉状態での削孔径)が従来よりも大きくすることができるため、対象深度領域上部の地盤の乱れを最小限にすることができる。これは、地盤改良として利用する場合は上部層の強度低下を防ぐことができ、土壌浄化として利用する場合は攪拌の影響による汚染を防ぐことができる。
【0052】
また、通信ケーブルなどを必要としない本発明の開閉翼作動感知装置は、攪拌装置のロッド構造に影響を及ぼさないものであるから、攪拌装置のロッドを単純でシンプルに設計する必要がある場合に特に有効である。
【0053】
また、本発明の開閉翼作動感知装置は、開閉式攪拌翼と流路を備えた攪拌装置であれば、既存の攪拌装置に対しロッドを改修することなく後付けすることも可能である。したがって、本発明は、既存の開閉式攪拌装置にも広く適用することが可能である。
【符号の説明】
【0054】
1 開閉式攪拌装置
2 攪拌ロッド
3 ロッド本体
4 掘削攪拌体
7 開閉翼作動感知装置
8 開閉翼作動感知装置
31 攪拌翼開放治具
33 ガイド孔
41 掘削ビット
43 開閉式攪拌翼
45 位置決めピン
47 吐出口
51 回転体
52 回転体
53 連結軸
61 ストッパー
62 圧縮コイルバネ
65 クラッチ
71 吐出口遮蔽板(弁体)
73 回転軸
75 位置決め部材
77 閉塞部分
81 弁体
83 回転軸
85 歯車
87 歯車
91 遮蔽ゴムスリーブ(弁体)
93 遮蔽ピン
【技術分野】
【0001】
本発明は、攪拌装置に設けられた開閉式攪拌翼の地盤内での開閉状況を感知するための装置に関する。
【背景技術】
【0002】
従来より地盤改良や基礎杭、または土壌浄化などの土木技術分野では、攪拌ロッドの外周に攪拌翼を備えた攪拌装置を、所定深度まで地盤に貫入して、地盤中で改良材や浄化材を吐出し、攪拌ロッドを回転させて攪拌翼により土砂と攪拌混合することが行われている。しかしながら、対象地盤の上部に硬質層や攪乱したくない地盤が存在すると、攪拌翼が障害となって攪拌装置の貫入が困難となったり、不要に地盤を乱したり、攪拌の影響を浅層部に広げてしまうという問題があった。そこで、近年では、目標の深度に至るまでは攪拌翼を縮径させておき、目標の深度に至ると拡径させることができる開閉式攪拌翼を備えた攪拌装置が提案されている。このような攪拌翼の開閉状況は、従来では、特許文献1に開示されるようなセンサー、或いは、近接スイッチや傾斜計を設けることによって把握されていた。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−82101号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、攪拌翼の開閉状況を感知するためのセンサー、近接スイッチ、傾斜計等の電気的感知手段は、開閉状況の信号を送信するための通信ケーブルなどの付帯設備を必要とするため、攪拌装置の構造が複雑で大掛かりになり、また、製造コストやメンテナンスコストが高くなるといった問題がある。さらに、信号伝送用の通信ケーブルなどを必要とする従来の感知装置では、攪拌ロッドに信号ライン専用の経路を設ける必要があるため、その分、攪拌ロッドの径サイズが大きくなって貫入抵抗が増し、地盤の固さによっては施工ができなくなるといった問題がある。
【0005】
上述した従来技術の問題点に鑑み、本発明の目的は、センサー等の電気的感知手段を用いることのない開閉翼作動感知装置であって、確実に攪拌翼の開閉状況を把握することができる簡易な開閉翼作動感知装置を提供することにある。
【課題を解決するための手段】
【0006】
上述した本発明の目的は、開閉式攪拌翼と、流体吐出口と、前記吐出口に通ずる流路と、を有する攪拌装置において用いられる感知装置であって、前記攪拌翼の開放動作(又は開閉動作)に機械的に連動するように設けられた、前記吐出口又は流路を開閉するための弁体を有する開閉翼作動感知装置によって達成される。
【0007】
かかる開閉翼作動感知装置において、前記攪拌翼に連動する弁体は、前記攪拌翼が閉翼位置にあるときに閉弁状態にあり、前記攪拌翼が開翼位置にあるときに開弁状態にある。
【0008】
上記開閉翼作動感知装置を用いた攪拌翼の開閉状況の感知方法では、攪拌翼を閉翼位置から開翼位置へ向けて変位させることによって、該攪拌翼に連動する弁体を開弁させて、吐出口から流体を吐出できるようにし、次いで、流路を介して前記吐出口から流体を吐出させ、その際、流体の吐出圧力及び/又は流量に基づいて攪拌翼の開閉状況を感知するようにする。
【発明の効果】
【0009】
本発明の開閉翼作動感知装置によれば、攪拌翼の開放動作に連動して、流路又は吐出口に設けられた弁体を開弁させるようになっている。したがって、流体の吐出圧力及び流量の少なくとも何れか一方を計測することによって弁体の開弁度合いを求めることができ、さらに、その開弁度合いから攪拌翼の開閉状況を確実に把握することができる。
【0010】
しかも、本発明の開閉翼作動感知装置は、機械的な構造体だけで構成され、電気的手段を必要としない。したがって、攪拌ロッドにセンサー、発信機、通信ケーブルなどを設ける必要がないので、攪拌装置を単純でシンプルな構造にでき、攪拌ロッドの径サイズをより小さくすることが可能になる。これにより、攪拌装置をより低コストで製造することができ、また、攪拌ロッドを細く設計できるので貫入抵抗を軽減することが可能になる。
【0011】
また、攪拌ロッドを細くすることができるため、閉翼位置の状態の時の径も小さくすることができる。これにより、拡径比(開状態での攪拌径/閉状態での削孔径)が従来よりも大きくすることができるため、対象深度領域上部の地盤の乱れを最小限にすることができる。これは、地盤改良として利用する場合は上部層の強度低下を防ぐことができ、土壌浄化として利用する場合は攪拌の影響による汚染を防ぐことができる。
【0012】
また、通信ケーブルなどを必要としない本発明の開閉翼作動感知装置は、攪拌装置のロッド構造に影響を及ぼさないものであるから、攪拌装置のロッドを単純でシンプルに設計する必要がある場合に特に有効である。
【0013】
また、本発明の開閉翼作動感知装置は、開閉式攪拌翼と流路を備えた攪拌装置であれば、既存の攪拌装置に対しロッドを改修することなく後付けすることも可能である。したがって、本発明は、既存の開閉式攪拌装置にも広く適用することが可能である。
【図面の簡単な説明】
【0014】
【図1】開閉翼作動感知装置を備えた攪拌装置の貫入時の状態を示しており、図1(A)は正面図であり、図1(B)はa−a線に沿った断面図である。
【図2】開閉翼作動感知装置を備えた攪拌装置の攪拌時の状態を示しており、図2(A)は正面図であり、図2(B)はb−b線に沿った断面図である。
【図3】開閉翼作動感知装置を備えた攪拌装置の引抜き時の状態を示している。
【図4】攪拌装置の攪拌翼を閉翼位置(図1)から開翼位置(図2)に変位させる際の動作を示す図である。
【図5】攪拌装置の攪拌翼を開翼位置(図2)から引抜位置(図3)に変位させる際の動作を示す図である。
【図6】攪拌装置を用いて施工する際における、攪拌翼の開閉動作を示す概念図である。
【図7】本発明に係る開閉翼作動感知装置の構成および作用を示す図である。
【図8】第1の変形例に係る開閉翼作動感知装置の構成および作用を示す図である。
【図9】第2の変形例に係る開閉翼作動感知装置の構成および作用を示す図である。
【発明を実施するための形態】
【0015】
以下、添付図面に基づいて、本発明に係る開閉翼作動感知装置の実施形態について説明する。
【0016】
(攪拌装置の構成)
はじめに、図1〜図3に基づいて開閉翼作動感知装置が設けられる攪拌装置の一例について説明する。
【0017】
攪拌装置1は、先端に掘削ビット41を備える攪拌ロッド2と、この攪拌ロッドの先端側に設けられた一対の開閉式攪拌翼43と、これらの攪拌翼の開放動作を補助する攪拌翼開放治具31と、攪拌翼43を所定の開放位置で固定するためのストッパー61と、このストッパーによる固定状態を解除するための解除機構(ガイド孔33,位置決めピン45)と、後述する開閉翼作動感知装置の要部を構成する吐出口遮蔽板(弁体)71とを有している。
【0018】
攪拌ロッド2はロッド本体3と掘削攪拌体4から構成されている。ロッド本体3と掘削攪拌体4は、それぞれ内部に流体搬送用の流路を有しており、両者の流路は連通している。掘削攪拌体4には、前記流路を介して搬送された流体を地中へ吐出するための流体吐出口47が設けられている(図7参照)。吐出口から吐出された流体は、旋回する攪拌翼43によって周辺土壌と攪拌される。なお、地中に吐出される流体は特に限定されず、土壌浄化材、地盤改良材、水など様々な種類の流体を採用することができる。また、これらの流体の態様は特に限定されず、流動可能である限り気体、液体、粉粒体など様々な態様で使用することができる。
【0019】
ロッド本体3の下端側は筒状に形成されており、その内側には、掘削攪拌体4の上部にある軸部分が挿着してある。ロッド本体3には略L字状のガイド孔33が形成してあり、掘削攪拌体4の軸部分には位置決めピン45が固設してある。掘削攪拌体4は、位置決めピン45がガイド孔33に沿って移動できる範囲内で、ロッド本体3に対し相対的に変位することが可能である。掘削攪拌体4の先端側には掘削ビット41が設けられ、該掘削ビットの上部において一対の攪拌翼43が開閉可能に設けられている。
【0020】
一対の攪拌翼43は、掘削攪拌体4の軸部分を挟んで対向するように設けられている。攪拌翼43は、例えば梯子状に形成され、その基端部に回転体51,52を有している(図2(B)参照)。攪拌翼43の回転体51,52は連結軸53によって攪拌ロッド2の掘削攪拌体4に連結されており、各攪拌翼は回転体51,52を基点として上下方向で自在にスイング可能である。各攪拌翼の基部にある連結軸53は、該攪拌翼と一体的に回動するように設けられている。
【0021】
上記構成の攪拌翼43は、地盤への貫入時には、その先端を上に向け該攪拌翼が上に閉じた状態になる「閉翼位置」にセットされる(図1)。この閉翼位置では、攪拌翼43はロッド本体3と外観上一体となって全体として一つの柱状体を構成している。
攪拌時には、攪拌翼43を閉翼位置から下方へスイングさせて開放し(図1→図2)、攪拌径Dが貫入時の削孔径に比して大となる「開翼位置」にセットされ、ストッパー61により固定される。図示する実施形態では、一対の攪拌翼43は90°スイングして相反する方向(水平方向)に延出しており、その結果、攪拌翼先端の旋回軌跡である攪拌径D(図2)が最大となる。
引抜時には、ストッパー61による攪拌翼43の固定状態を解除して、該攪拌翼を垂れ下がった「引抜位置」にスイングさせ下に閉じた状態にする(図3)。
【0022】
攪拌翼43の基端部にある一方の回転体51には、平坦な係合面が形成されている。この係合面は、攪拌翼43が開翼位置(図2)にあるときに、ストッパー61の平坦な底面側と当接する。このようにストッパー61と回転体51の平坦面同士が当接することにより、攪拌翼43のスイングが妨げられるので、攪拌翼が図2に示す開翼位置に固定される。
【0023】
攪拌翼開放治具31は、ロッド本体3の外周面に沿って上下方向に摺動自在に設けられている。この攪拌翼開放治具31は、攪拌ロッド2を引き上げることで周辺地盤から受ける抵抗により下方に摺動し、攪拌翼43を付勢する役割を担っている。攪拌翼開放治具31による下方への付勢がきっかけとなって、攪拌翼43が閉翼位置(図1)から開翼位置(図2)へスイングし始める。
【0024】
ストッパー61は、攪拌ロッド2のロッド本体3の下端部に設けられ、攪拌翼43の回転体51の上方に位置している。このストッパー61は、図1(B)、図2(B)に示すように相反する方向に水平に延出するように2つ設けられ、各ストッパーは、ロッド本体3に対し回転可能に設けられた回転部材に対して固設されている。攪拌翼43が図2に示す開翼位置にあるときには、ストッパー61の底面側が攪拌翼43の回転体51の平坦な係合面と当接して、該攪拌翼を開翼位置に固定する。
【0025】
上記構成のストッパー61は、圧縮コイルバネ62によって付勢されて、その基端にある回転部材のスライド回転を伴いながら旋回することが可能である。ただし、クラッチ65(ストッパーの回転止め部材)が設けられているため、所定の角度範囲内でしか旋回できない。
図1に示す閉翼位置では、ストッパー61は、圧縮コイルバネ62により付勢されているが、攪拌翼43の羽根が邪魔しているため、旋回することはない。
図1の閉翼位置から図2の開翼位置へ変位する過程では、攪拌翼43の開放に伴ってその羽根がストッパー61から遠ざかるため、ストッパー61は圧縮コイルバネ62により付勢されて徐々に旋回する。
【0026】
ストッパー61による攪拌翼43の固定状態を解除するための解除機構は、ロッド本体3の外周面に形成されたガイド孔33と、このガイド孔に沿って移動可能な位置決めピン45とから構成される。位置決めピン45は、掘削攪拌体4の軸部分に固設されている。位置決めピン45を案内するガイド孔33は、横孔と縦孔が連なって形成された略L字状の形態を有している。ロッド本体3のL字状ガイド孔33と、掘削攪拌体4の位置決めピン45との係合関係により、掘削攪拌体4はロッド本体3に対し所定角度の範囲内で相対回転可能であり、また、所定長さだけ相対移動可能である。
【0027】
(攪拌翼の開閉動作)
次に、施工時における攪拌翼43の開閉動作について、図6に示す一連の工程を参照しながら説明する。なお、攪拌装置1の具体的構成については必要に応じて図1〜図3を参照し、開放した攪拌翼43を固定するための動作については図4を参照し、開放した攪拌翼43の固定状態を解除するための動作については図5を参照する。
【0028】
図6(a)に示す貫入開始前には、図1に示すように攪拌翼43の先端を上に向けて該攪拌翼が上に閉じた状態になる「閉翼位置」にセットするとともに、攪拌翼開放治具31が攪拌翼43の先端の上部に位置するように位置決めする。次に、正転(右回転)させながら攪拌装置1の貫入を開始する。
【0029】
攪拌装置1を貫入している間は(図6(a)→(b))、攪拌翼43は図1に示す閉翼状態を維持し、攪拌翼43がロッド本体3と外観上一体となって全体として1つの柱状体を構成する。そのため、貫入時において攪拌翼43が貫入の妨げとなることはない。
【0030】
貫入を続けて目標深度まで達したら(図6(b))、正転させながら攪拌装置1を所定長さ引き上げる。すると、攪拌翼43の先端上部にある攪拌翼開放治具31が、攪拌装置1の引き上げに伴う土砂の抵抗を受けて下方に摺動し、閉翼位置から開翼位置へスイングするように攪拌翼を付勢する。この攪拌翼開放治具31による付勢がきっかけとなって、攪拌翼43が開脚するようにスイングし始める(図6(b)→(c))。以後は、攪拌翼43が直接、引き上げに伴う土砂の抵抗を受けて、周辺地盤に突き刺さりながら下方にスイングする(図6(c))。一方、攪拌翼43の開脚に伴って、図4の(a)から(f)に示すように、ストッパー61が圧縮コイルバネ62によって付勢されて所定角度だけ旋回する。
【0031】
そして、攪拌翼43が90°スイングして攪拌径が最大となる位置(水平位置)に至ると、図4(f)に示すように、旋回したストッパー61の平坦な底面に対し、攪拌翼43の基部にある回転体51の平坦な係合面が当接して、回転体51の回転が妨げられる。これにより、各攪拌翼は図2の開翼位置に固定される(図6(c))。
以後は、攪拌装置1を正転させながら、所定深度領域での貫入と引上を必要サイクル繰り返して、旋回する攪拌翼43による攪拌を行う(図6(c)→(d)→(e)→(f))。
【0032】
図6(c)乃至(f)に示す攪拌工程を終えて攪拌装置1を地中から引き抜く際には、攪拌装置を逆転させる。すると、攪拌翼43や掘削ビット41を介して受けた周辺地盤の抵抗により、ロッド本体3の先端側に挿設した掘削攪拌体4が相対回転し始める。このとき、図5に示すように、掘削攪拌体4の位置決めピン45がロッド本体3のガイド孔33に沿って横方向に移動し、縦孔に至ると掘削攪拌体4は地盤の反力を受けてその位置にとどまり、ロッド本体3が引抜き力によって当該縦孔の長さ分だけ上昇する。その結果、図5(c)に示すように、ストッパー61が攪拌翼43の回転体51から所定長さ離れるので、該ストッパーによる攪拌翼の固定状態が解除される。
【0033】
そして、攪拌装置1を逆転させながら引き上げると(図6(f)→(g))、攪拌翼43が引き上げに伴う周辺地盤の抵抗を受け、図3に示すような垂れ下がった「引抜位置」にスイングして下向きに閉翼する。以降は、攪拌翼43が引き抜きの障害となることがなく、攪拌装置1を地盤から引き抜くことができる。
【0034】
(開閉翼作動感知装置の構成)
次に、図7に基づいて、本発明の開閉翼作動感知装置について説明する。
図7に示す実施形態において、開閉翼作動感知装置7は、シャッター式の弁体である吐出口遮蔽板71と、該遮蔽板を回転自在に軸支する回転軸73と、遮蔽板を閉弁状態に位置決めする位置決め部材75とを有している。
【0035】
遮蔽板71は、吐出口47を完全に閉塞できる略円形の閉塞部分77を有しており、遮蔽板71の先端側は位置決め部材75によって支えられ、基端側は攪拌翼43と干渉し得るようになっている。位置決め部材75は、遮蔽板71の閉塞部分77が吐出口47を閉塞する位置において該遮蔽板の先端側を下支えし、図7(a)に示す閉弁状態に位置決めする役割を担っている。回転軸73は、遮蔽板71の閉塞部分77と基端との間に位置している。図7(b)に示すように、遮蔽板71の基端側が攪拌翼43によって押し込まれると、該遮蔽板が回転して、吐出口47が開口し始める。
【0036】
(開閉翼作動感知装置の動作)
次に、図6に示す一連の工程における開閉翼作動感知装置の作用について、図7を参照しながら説明する。
【0037】
攪拌装置の貫入時(図6(a)→(b))には、図7(a)に示すように、遮蔽板71は吐出口47を閉塞する「閉弁状態」に位置している。
攪拌装置が目標深度に達して攪拌翼43を開放させ始めると(図6(b)→(c))、スイングする攪拌翼43が遮蔽板71の基端側を押し込んで、図7(b)に示すように遮蔽板71を徐々に回転させる。
攪拌翼43が90°スイングして水平位置に至ると(図6(c))、図7(c)に示すように遮蔽板71は吐出口47を完全に開口させる「開弁状態」に至る。
攪拌装置を引き抜く際に攪拌翼43を下方に閉じさせると(図6(f)→(g))、その過程で攪拌翼43は遮蔽板71の基端部を通過し、該遮蔽板は自由に回転可能な状態に至る。そして、遮蔽板71は引上げに伴う土砂の抵抗を受け、図7(d)に示すように吐出口47を閉塞する「閉弁状態」に至る。
【0038】
(開閉翼の作動感知方法)
施工時において、攪拌翼43が水平位置(図6(c))に至ったか否かは、目視により確認することができない。そこで、攪拌翼43が水平位置に至ったと推測される場合には、攪拌ロッド内の流路を介して吐出口47から流体を吐出させ、その際、流体の吐出圧力及び流量に基づいて攪拌翼43の開閉状況を感知する。なお、吐出口47が完全に閉じている場合には、流体の吐出量がゼロとなって、吐出圧力が上昇する。一方、吐出口47が開いている場合には、遮蔽板71の開弁度合いに応じて、流体の吐出量が上昇し、吐出圧力が下がる。したがって、流体の吐出圧力及び流量を計測することで吐出口47の開口度合いを求めることができ、それに基づいて、攪拌翼43の開閉状況を把握することができる。
【0039】
攪拌翼43の開き具合が不完全であると判断された場合には、攪拌装置を引上げて攪拌翼をさらにスイングさせるようにする。一方、攪拌翼43が十分に開ききったと判断された場合には、攪拌装置を正転させながら攪拌作業を行う。
【0040】
上述した開閉翼作動感知装置は本発明の実施形態の一例であり、特許請求の範囲に記載された発明の範囲内で種々の改変が可能である。例えば、開閉翼作動感知装置について以下に述べるような変形例を採用することも可能である。
【0041】
(開閉翼作動感知装置の第1の変形例)
図8に示す第1の変形例に係る開閉翼作動感知装置8は、流路の吐出口手前に設けられた回転式の円盤状の弁体81と、該弁体を保持する回転軸83と、該回転軸に一体的に設けられた歯車85と、攪拌翼43の連結軸53に一体的に設けられており前記歯車85と歯合する歯車87とを有している。
【0042】
攪拌装置の貫入時(図6(a)→(b))には、図8(a)に示すように、弁体81は流路を遮断する「閉弁状態」に位置している。
攪拌装置が目標深度に達して攪拌翼を開放させ始めると(図6(b)→(c))、攪拌翼43のスイングに伴って連結軸53が回動する。同時に、図8(b)に示すように、連結軸53の回動が、歯車87,85及び回転軸83を介して弁体81に伝達されるので、攪拌翼43のスイング動作に連動して弁体81が回転する。
攪拌翼43が90°スイングして水平位置に至ると(図6(c))、図8(c)に示すように弁体81は流路を完全に開放させる「開弁状態」に至る。
攪拌装置を引き抜く際に攪拌翼43を下方に閉じさせると(図6(f)→(g))、攪拌翼43のスイングに連動して再び弁体81が回転する。その結果、図8(d)に示すように、弁体81は流路を遮断する「閉弁状態」に至る。
【0043】
この一連の工程での攪拌翼43の開閉状況は、前述した感知方法と同様の方法で把握することができる。
【0044】
(開閉翼作動感知装置の第2の変形例)
図9に示す第2の変形例に係る開閉翼作動感知装置は、掘削攪拌体4内の流路の一部を形成する遮蔽ゴムスリーブ91と、各攪拌翼の連結軸53に立設された遮蔽ピン93と、を有している。
【0045】
ゴムホース状の弁体をなす遮蔽ゴムスリーブ91は、外力を受けたときに押しつぶれて変形するように構成され、変形している間流路を遮断(又は変形量に応じて流量を制限)する役割を担っている。各攪拌翼の連結軸53に立設された遮蔽ピン93は、流路を挟んで対向する遮蔽ピンと協動して、遮蔽ゴムスリーブ91を絞るように変形させる役割を担っている。
【0046】
攪拌装置の貫入時(図6(a)→(b))には、図9(a)に示すように、遮蔽ゴムスリーブ91は、流路を挟んで向かい合う遮蔽ピン93,93の先端部で押し挟まれて、流路を遮断する「閉弁状態」に変形している。
攪拌装置が目標深度に達して攪拌翼を開放させ始めると(図6(b)→(c))、攪拌翼43のスイングに伴って連結軸53が回動するので、図9(b)に示すように、攪拌翼43のスイング動作に連動して遮蔽ピン93が回動する。
攪拌翼43が90°スイングして水平位置に至ると(図6(c))、図9(c)に示すように、押しつぶしていた遮蔽ピン93が遮蔽ゴムスリーブ91から離れ、遮蔽ゴムスリーブ91は流路を完全に開放させる「開弁状態」に復帰する。
攪拌装置を引き抜く際に攪拌翼43を下方に閉じさせると(図6(f)→(g))、攪拌翼43のスイングに伴って再び遮蔽ピン93が回動する。その結果、図9(d)に示すように、遮蔽ゴムスリーブ91は、流路を挟んで向かい合う遮蔽ピン93,93の先端部で押し挟まれて、流路を遮断する「閉弁状態」に変形する。
【0047】
この一連の工程での攪拌翼43の開閉状況は、前述した感知方法と同様の方法で把握することができる。
【0048】
(攪拌装置の変形例)
上述した実施形態では、開閉翼作動感知装置の適用例として、油圧や押し棒などが不要な開閉翼を備えた攪拌装置を例示したが、本発明に係る開閉翼作動感知装置を適用可能な攪拌装置はこれに限定されない。
例えば、特開2003-035083号公報、特開2003-106082号公報、特開2005-315052号公報、特開2009-002082号公報に開示されるような、攪拌翼を開閉するための油圧シリンダ、攪拌翼を押し引きするための押し棒、リンク機構などを備えた攪拌装置にも適用可能である。
【0049】
(本発明に係る開閉翼作動感知装置の効果)
上述したように、本発明によれば、攪拌翼の開放動作に連動して、流路又は吐出口に設けられた弁体を開弁させるようになっている。したがって、流体の吐出圧力及び流量を計測することによって弁体の開弁度合いを求めることができ、さらに、その開弁度合いから攪拌翼の開閉状況を確実に把握することができる。
【0050】
しかも、本発明の開閉翼作動感知装置は、機械的な構造体だけで構成され、電気的手段を必要としない。したがって、攪拌ロッドにセンサー、発信機、通信ケーブルなどを設ける必要がないので、攪拌装置を単純でシンプルな構造にでき、攪拌ロッドの径サイズをより小さくすることが可能になる。これにより、攪拌装置をより低コストで製造することができ、また、攪拌ロッドを細く設計できるので貫入抵抗を軽減することが可能になる。
【0051】
また、攪拌ロッドを細くすることができるため、閉翼位置の状態の時の径も小さくすることができる。これにより、拡径比(開状態での攪拌径/閉状態での削孔径)が従来よりも大きくすることができるため、対象深度領域上部の地盤の乱れを最小限にすることができる。これは、地盤改良として利用する場合は上部層の強度低下を防ぐことができ、土壌浄化として利用する場合は攪拌の影響による汚染を防ぐことができる。
【0052】
また、通信ケーブルなどを必要としない本発明の開閉翼作動感知装置は、攪拌装置のロッド構造に影響を及ぼさないものであるから、攪拌装置のロッドを単純でシンプルに設計する必要がある場合に特に有効である。
【0053】
また、本発明の開閉翼作動感知装置は、開閉式攪拌翼と流路を備えた攪拌装置であれば、既存の攪拌装置に対しロッドを改修することなく後付けすることも可能である。したがって、本発明は、既存の開閉式攪拌装置にも広く適用することが可能である。
【符号の説明】
【0054】
1 開閉式攪拌装置
2 攪拌ロッド
3 ロッド本体
4 掘削攪拌体
7 開閉翼作動感知装置
8 開閉翼作動感知装置
31 攪拌翼開放治具
33 ガイド孔
41 掘削ビット
43 開閉式攪拌翼
45 位置決めピン
47 吐出口
51 回転体
52 回転体
53 連結軸
61 ストッパー
62 圧縮コイルバネ
65 クラッチ
71 吐出口遮蔽板(弁体)
73 回転軸
75 位置決め部材
77 閉塞部分
81 弁体
83 回転軸
85 歯車
87 歯車
91 遮蔽ゴムスリーブ(弁体)
93 遮蔽ピン
【特許請求の範囲】
【請求項1】
開閉式攪拌翼と、流体吐出口と、前記吐出口に通ずる流路と、を有する攪拌装置において用いられる感知装置であって、
前記攪拌翼の開放動作に連動するように設けられた、前記吐出口又は流路を開閉するための弁体を有することを特徴とする開閉翼作動感知装置。
【請求項2】
前記攪拌翼に連動する弁体は、
前記攪拌翼が閉翼位置にあるときに、閉弁状態にあり、
前記攪拌翼が開翼位置にあるときに、開弁状態にある
ことを特徴とする請求項1記載の開閉翼作動感知装置。
【請求項3】
請求項1記載の開閉翼作動感知装置を用いた攪拌翼の開閉状況の感知方法であって、
攪拌翼を閉翼位置から開翼位置へ向けて変位させることによって、該攪拌翼に連動する弁体を開弁させて、吐出口から流体を吐出できるようにし、
流路を介して前記吐出口から流体を吐出させ、その際、流体の吐出圧力及び/又は流量に基づいて攪拌翼の開閉状況を感知する、
ことを特徴とする攪拌装置の開閉翼作動感知方法。
【請求項1】
開閉式攪拌翼と、流体吐出口と、前記吐出口に通ずる流路と、を有する攪拌装置において用いられる感知装置であって、
前記攪拌翼の開放動作に連動するように設けられた、前記吐出口又は流路を開閉するための弁体を有することを特徴とする開閉翼作動感知装置。
【請求項2】
前記攪拌翼に連動する弁体は、
前記攪拌翼が閉翼位置にあるときに、閉弁状態にあり、
前記攪拌翼が開翼位置にあるときに、開弁状態にある
ことを特徴とする請求項1記載の開閉翼作動感知装置。
【請求項3】
請求項1記載の開閉翼作動感知装置を用いた攪拌翼の開閉状況の感知方法であって、
攪拌翼を閉翼位置から開翼位置へ向けて変位させることによって、該攪拌翼に連動する弁体を開弁させて、吐出口から流体を吐出できるようにし、
流路を介して前記吐出口から流体を吐出させ、その際、流体の吐出圧力及び/又は流量に基づいて攪拌翼の開閉状況を感知する、
ことを特徴とする攪拌装置の開閉翼作動感知方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2011−162962(P2011−162962A)
【公開日】平成23年8月25日(2011.8.25)
【国際特許分類】
【出願番号】特願2010−24480(P2010−24480)
【出願日】平成22年2月5日(2010.2.5)
【出願人】(391019740)三信建設工業株式会社 (59)
【出願人】(391064418)株式会社クロサワジオメック (4)
【Fターム(参考)】
【公開日】平成23年8月25日(2011.8.25)
【国際特許分類】
【出願日】平成22年2月5日(2010.2.5)
【出願人】(391019740)三信建設工業株式会社 (59)
【出願人】(391064418)株式会社クロサワジオメック (4)
【Fターム(参考)】
[ Back to top ]