
関係推定装置、関係推定システム、関係推定プログラムおよび関係推定方法
【構成】関係推定システム100は、複数のLRF12を備える中央制御装置10を有する。LRF12は、たとえば、ショッピングモールの通路を通る人々の位置を検出する。この通路には、特に人通りが多い場所や、人が密集する場所が特定領域SAとして設定される。そして、複数の人間の位置のそれぞれが特定領域SAに含まれているかが判断され、中央制御装置10は、特定領域SAに含まれていない人間の移動軌跡データに基づいて、人間関係の有無を推定する。
【効果】関係推定システム100は、無関係な人々が頻繁に行き交ったり、集まったりする場所を除いて、人間関係を推定することができる。そのため、人々の人間関係を精度よく推定することができるようになる。
【効果】関係推定システム100は、無関係な人々が頻繁に行き交ったり、集まったりする場所を除いて、人間関係を推定することができる。そのため、人々の人間関係を精度よく推定することができるようになる。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、関係推定装置、関係推定システム、関係推定プログラムおよび関係推定方法に関し、特にたとえば、複数の人間の人間関係を推定する、関係推定装置、関係推定システム、関係推定プログラムおよび関係推定方法に関する。
【背景技術】
【0002】
特許文献1に開示されている、関係検知システムは、ロボットを中心とする所定領域内において、構成員の行動の履歴を記録する。そして、複数の構成員の行動の履歴に基づいて、構成員の他者との共存の仕方から、各構成員間の関係が把握される。
【0003】
また、特許文献2に開示されている、関係検知システムでは、無線タグが取り付けられている人間の移動軌跡が記録される。そして、複数の人間の移動軌跡に基づいて、人間同士の友好関係を把握することができる。
【特許文献1】特開2005−131748号公報[B25J 13/00, B25J 5/00]
【特許文献2】特開2005−327156号公報[G06F 19/00, G01V 15/00, G06K 17/00, H04B 5/02]
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところが、集まりが起きる広場では人間関係と関係なく同時存在が起きるため、特許文献1の関係検知システムでは人間関係の検出精度が低下してしまう。また、多くの人々が行き交う街角や、流れがある通路では多くの移動軌跡が類似したものになるため、特許文献2の関係検知システムでは友好関係を正しく把握できないことがある。
【0005】
それゆえに、この発明の主たる目的は、新規な、関係推定装置、関係推定システム、関係推定プログラムおよび関係推定方法を提供することである。
【0006】
この発明の他の目的は、人間関係を精度よく推定することができる、関係推定装置、関係推定システム、関係推定プログラムおよび関係推定方法を提供することである。
【課題を解決するための手段】
【0007】
この発明は、上記の課題を解決するために、以下の構成を採用した。なお、括弧内の参照符号および補足説明等は、この発明の理解を助けるために記述する実施形態との対応関係を示したものであって、この発明を何ら限定するものではない。
【0008】
第1の発明は、空間内に存在する複数の人間のそれぞれの位置を検出する検出手段を有する、関係推定装置であって、複数の人間の位置のそれぞれが特定領域に含まれているかを判断する判断手段、および特定領域に含まれていない少なくとも2人以上の人間のそれぞれの位置に基づいて、人間関係を推定する推定手段を備える、関係推定装置である。
【0009】
第1の発明では、関係推定装置(10:実施例において対応する部分を例示する参照符号。以下、同じ。)は、検出手段(12)は、たとえば複数のLRFであり、それらのLRFから照射されたレーザーによって、空間内に存在する複数の人間のそれぞれの位置が検出される。また、空間内において、人通りが多い場所や、人が密集する場所が特定領域(SA)とされる。さらに、判断手段(16,S9)は、複数の人間の位置のそれぞれがその特定領域に含まれているかを判断する。そして、推定手段(16,S15)は、たとえば、特定領域に含まれていない2人の位置に基づいて、人間関係の有無を推定する。
【0010】
第1の発明によれば、無関係な人々が頻繁に行き交ったり、集まったりする場所を除いて、人間関係を推定することができる。そのため、人々の人間関係を精度よく推定することができるようになる。
【0011】
第2の発明は、空間内に存在する複数の人間のそれぞれの位置を検出する検出手段(12)を有する、関係推定システム(100)であって、複数の人間の位置のそれぞれが特定領域に含まれているかを判断する判断手段(16,S9)、および特定領域に含まれていない少なくとも2人以上の人間のそれぞれの位置に基づいて、人間関係を推定する推定手段(16,S15)を備える、関係推定システムである。
【0012】
第2の発明でも、第1の発明と同様、無関係な人々が頻繁に行き交ったり、集まったりする場所を除いて、人間関係を推定することができる。そのため、人々の人間関係を精度よく推定することができるようになる。
【0013】
第3の発明は、空間内に存在する複数の人間のそれぞれの位置を検出する検出手段(12)を有する、関係推定装置(10)のプロセッサ(16)を、複数の人間の位置のそれぞれが特定領域に含まれているかを判断する判断手段(S9)、および特定領域に含まれていない少なくとも2人以上の人間のそれぞれの位置に基づいて、人間関係を推定する推定手段(S15)として機能させる、関係推定プログラムである。
【0014】
第3の発明でも、第1の発明と同様、無関係な人々が頻繁に行き交ったり、集まったりする場所を除いて、人間関係を推定することができる。そのため、人々の人間関係を精度よく推定することができるようになる。
【0015】
第4の発明は、空間内に存在する複数の人間のそれぞれの位置を検出する検出手段(12)を有する、関係推定装置(10)の関係推定方法であって、複数の人間の位置のそれぞれが特定領域に含まれているかを判断し(S9)、そして特定領域に含まれていない少なくとも2人以上の人間のそれぞれの位置に基づいて、人間関係を推定する(S15)、関係推定方法である。
【0016】
第4の発明でも、第1の発明と同様、無関係な人々が頻繁に行き交ったり、集まったりする場所を除いて、人間関係を推定することができる。そのため、人々の人間関係を精度よく推定することができるようになる。
【発明の効果】
【0017】
この発明によれば、無関係な人々が頻繁に行き交ったり、集まったりする場所を除いて、人々の人間関係が推定されるため、人間関係の推定の精度を向上させることができる。
【0018】
この発明の上述の目的、その他の目的、特徴および利点は、図面を参照して行う以下の実施例の詳細な説明から一層明らかとなろう。
【図面の簡単な説明】
【0019】
【図1】図1はこの発明の一実施例の関係推定システムの概要を示す図解図である。
【図2】図2は図1に示す中央制御装置の電気的な構成を示すブロック図である。
【図3】図3は図1および図2に示すLRFの計測領域を示す図解図である。
【図4】図4は図3に示すLRFを利用して検出された移動軌跡の一例を示す図解図である。
【図5】図5は図1に示すLRFが設置される或る場所の地図を示す図解図である。
【図6】図6は図2に示すメモリに記憶される移動軌跡テーブルの一例を示す図解図である。
【図7】図7は図2に示すメモリに記憶される関係人間テーブルの一例を示す図解図である。
【図8】図8は図2に示すメモリのメモリマップの一例を示す図解図である。
【図9】図9は図2に示すCPUの移動軌跡選別処理を示すフロー図である。
【図10】図10は図2に示すCPUの人間関係推定処理を示すフロー図である。
【発明を実施するための形態】
【0020】
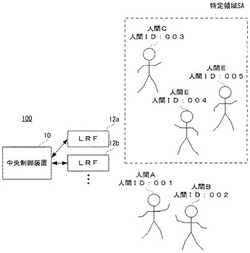
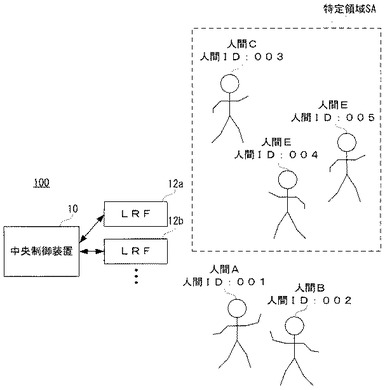
図1を参照して、この実施例の関係推定システム100は、LRF12a,12bを含む数台のLRFを有する中央制御装置10を備える。LRF12a,12bは、人間が任意に移動することができる場所(空間または環境)に設置される。人間が任意に行動する場所は、会社のフロア、博物館、ショッピングモールまたはアトラクション会場などであり、LRF12a,12bは様々な場所に設置される。なお、この空間には、システムの管理者によって特定領域SAが設定されている。また、この特定領域SAについては後述するため、ここでの詳細な説明は省略する。
【0021】
中央制御装置10は、所定時間(たとえば、1秒)毎にLRF12a,12bによって、任意に移動する人間の位置を検出し、検出された位置のデータを記憶する。また、中央制御装置10は、記憶された位置データに基づいて、少なくとも2人以上の人間の人間関係を推定する。
【0022】
また、位置が検出された人間には、検出された順番に人間IDが付与される。たとえば、図1では、人間Aには人間ID「001」が付与され、人間Bには人間ID「002」が付与され、人間Cには人間ID「003」が付与され、人間Dには人間ID「004」が付与され、人間Eには人間ID「005」が付与される。
【0023】
なお、図1では簡単のため人間は5人しか示していないが、中央制御装置10はさらに多くの人間の位置データおよび移動軌跡データを同時に検出することができる。また、中央制御装置10は関係推定装置と言われることもある。
【0024】
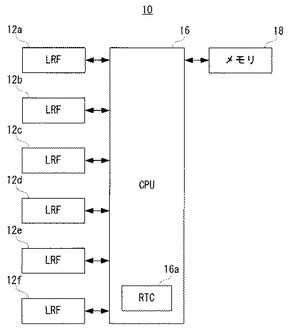
図2は中央制御装置10の電気的な構成を示すブロック図である。図2を参照して、中央制御装置10は、LRF12a−12f、CPU16およびメモリ18を含む。CPU16は、マイクロコンピュータ或いはプロセッサとも呼ばれ、時刻情報を出力するRTC16aを含む。また、CPU16には、先述したLRF12aおよびLRF12bに加えて、LRF12c,LRF12d,LRF12eおよびLRF12fも接続される。さらに、CPU16にはメモリ18も接続される。なお、LRF12a−12fを区別する必要がない場合、「LRF12」と言う。
【0025】
LRF12は、レーザーを照射し、物体(人間も含む)に反射して戻ってくるまでの時間から当該物体までの距離を計測するものである。たとえば、トランスミッタ(図示せず)から照射したレーザーを回転ミラー(図示せず)で反射させて、前方を扇状に一定角度(たとえば、0.5度)ずつスキャンする。ここで、LRF12としては、SICK社製のレーザーレンジファインダ(型式 LMS200)を用いることができる。このレーザーレンジファインダを用いた場合には、距離8mを±15mm程度の誤差で計測可能である。
【0026】
メモリ18は、図示は省略をするが、ROM,HDDおよびRAMを含む。ROMおよびHDDには、中央制御装置10の動作を制御するための制御プログラムが予め記憶される。また、RAMは、CPU16のワークメモリやバッファメモリとして用いられる。
【0027】
なお、検出された人間の位置は、位置データとして記憶される際に、RTC16aが出力する時刻情報が関連付けられる。
【0028】
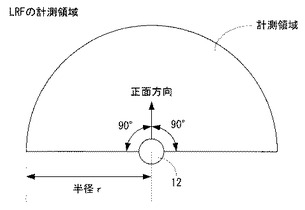
次に、LRF12について詳細に説明する。図3を参照して、LRF12の計測範囲は、半径r(r≒8m)の半円形状(扇形)で示される。つまり、LRF12は、その正面方向を中心とした場合に、左右90度の方向を所定の距離(r)以内で計測可能である。
【0029】
また、使用しているレーザーは、日本工業規格 JIS C 6802「レーザー製品の安全基準」におけるクラス1レーザーであり、人の眼に対して影響を及ぼさない安全なレベルである。また、この実施例では、LRF12のサンプリングレートを37Hzとした。これは、歩行するなどにより移動する人間の位置を連続して検出するためである。
【0030】
さらに、LRF12の各々は、計測範囲が重なるように配置され、図示は省略するが、床面から約90cmの高さに固定される。この高さは、被験者の胴体と腕(両腕)とを検出可能とするためであり、たとえば、日本人の成人の平均身長から算出される。したがって、中央制御装置10を設ける場所(地域ないし国)や被験者の年齢ないし年代(たとえば、子供,大人)に応じて、LRF12を固定する高さを適宜変更するようにしてよい。なお、本実施例では、設定されるLRF12は6台としたが、2台以上であれば、任意の台数のLRF12が設置されてもよい。
【0031】
このような構成の中央制御装置10では、CPU16がLRF12からの出力(距離データ)に基づいて、パーティクルフィルタを用いて、人間の現在位置の変化を推定する。そして、推定された位置の変化が移動軌跡として記録される。
【0032】
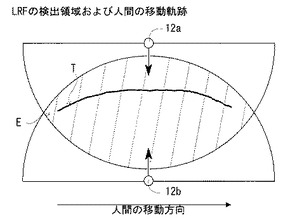
たとえば、図4を参照して、LRF12a,12bは互いに向い合せに設置され、LRF12a,12bの計測範囲が重なる範囲は斜線が付されて示される。斜線が付された範囲は検出領域Eとされ、この検出領域E内では人間の位置が連続的に検出される。そして、連続的に検出された位置の変化が移動軌跡Tとなる。つまり、移動軌跡データは、複数の位置データから構成される。なお、検出領域EにはX−Y座標が設定され、人間の位置データは(X,Y)の座標で示すことができる。
【0033】
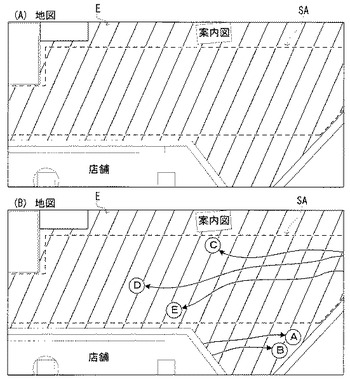
図5(A)はLRF12が設置される場所を示す地図を示す図解図である。図5(A)を参照して、地図が対応する場所は或るショッピングモールである。また、地図の左下側には店舗が示され、右上の中央付近にはショッピングモール内を案内するための案内図が示される。また、地図の右下には休憩スペースが設けられている。また、図5(A)の地図では、ショッピングモールの通路が検出領域Eである。そして、その検出領域E(通路)において、人通りが多い領域が特定領域SAとされる。
【0034】
図5(B)を参照して、人間Aおよび人間Bには人間関係が有り、2人は共に店舗から休憩スペースに移動している。また、人間C、人間Dおよび人間Eのそれぞれには人間関係は無く、3人はそれぞれが異なる目的を持って通路を移動している。人間Cの目的は案内図を見つけることであり、人間Dの目的は通路を通り抜けることであり、人間Eの目的は店舗に向かうことである。ただし、人間C、人間Dおよび人間Eは、略同時に検出領域E内に入っているため、ショッピングモールの通路に入ってからしばらくの間は、この3人の移動軌跡は似た形状になる。
【0035】
ここで、検出領域Eで検出された全ての移動軌跡の類似度に基づいて人間関係を推定した場合、人間Aおよび人間Bに対して人間関係が有ると推定されるだけでなく、人間C、人間Dおよび人間Eに対しても人間関係が有ると推定されてしまう。
【0036】
そこで、本実施例では、人通りが多い特定領域SAに存在する人間については、人間関係が推定されないようにする。具体的には、検出領域E内の全ての人間の位置が検出されたとき、検出された人間の位置が特定領域SAに含まれていなければ、その人間の位置データは移動軌跡テーブルに記録される。また、人間の位置が特定領域SAに含まれていれば、その人間の位置データは移動軌跡テーブルに記録されることは無い。そして、中央制御装置10は、移動軌跡テーブルに記録された移動軌跡データに基づいて、少なくとも2人以上の人間の人間関係を推定する。つまり、特定領域SAに存在する人間は位置データが記録されないため、人間関係が推定されない。
【0037】
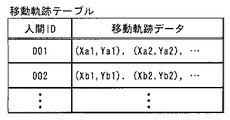
たとえば、図5(B)における人間Aおよび人間Bの位置は特定領域SAに含まれていないため、2人の移動軌跡データは図6に示す移動軌跡テーブルに記録される。図6を参照して、この移動軌跡テーブルは人間IDおよび移動軌跡データの列から構成される。また、人間IDの列には人間ID「001」および人間ID「002」などが記録される。移動軌跡データの列には、人間IDの欄に対応して、所定時間毎に連続して検出された位置データを表す座標が記録される。たとえば、人間ID「001(人間A)」に対応して、移動軌跡データの列には「(Xa1,Ya1),(Xa2,Ya2),…」が記録される。また、人間ID「002(人間B)」に対応して、移動軌跡データの列には、「(Xb1,Yb1),(Xb2,Yb2),…」が記録される。そして、移動軌跡テーブルにおいて、一行毎に記録されている複数の位置(座標)データが、移動軌跡データを表す。
【0038】
また、本実施例では、移動軌跡テーブルに記録された移動軌跡データから人間関係を推定するために、DPマッチングが利用される。この場合、まず、移動軌跡データは全て状態列に変換される。次に、変換された状態列毎にDPマッチングによって類似度が算出される。そして、算出された類似度が閾値より大きい、状態列の組み合わせがある場合、その組み合わせに対応する2人の人間に対して、人間関係が有ると推定される。なお、DPマッチングを利用して移動軌跡を比較する手法については、同じ出願人の出願に係る同時係属中の特開2010−231470号公報に開示されているため、詳細な説明は省略する。
【0039】
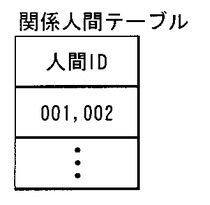
また、人間関係が有ると推定されると、推定された人間の人間IDが、推定結果として関係人間テーブルに記憶される。図7を参照して、図5(B)に示す人間Aと人間Bとに人間関係が有ると推定された場合、2人の人間ID「001」、「002」が関係人間テーブルに記憶される。
【0040】
なお、ここでは記録される人間IDが2人分だけだが、3人以上の人間に1つの人間関係が有ると推定された場合、関係人間テーブルの1つの欄には、3人以上の人間の人間IDが記録される。たとえば、3人の家族に対して人間関係が有ると推定された場合、関係人間テーブルには、その3人の人間IDが1つの欄に記録される。また、関係人間テーブルには、人間IDと共に算出された類似度が記録されてもよい。
【0041】
このように、本実施例では、日常的に人通りが多かったり、人が集まりやすかったりする領域を特定領域SAとし、その特定領域SAに存在する人間については人間関係が推定さないように出来る。そのため、人間関係の推定精度を向上させることができる。
【0042】
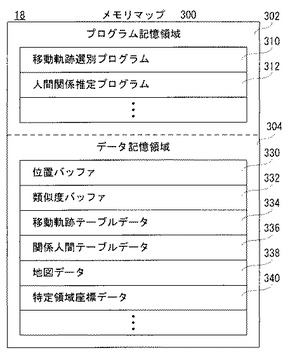
図8は図2に示す中央制御装置10におけるメモリ18のメモリマップ300の一例を示す図解図である。図8で示すように、メモリ18はプログラム記憶領域302およびデータ記憶領域304を含む。プログラム記憶領域302には、中央制御装置10を動作させるためのプログラムとして、移動軌跡選別プログラム310および人間関係推定プログラム312などが記憶される。
【0043】
移動軌跡選別プログラム310は、連続的に記録される位置データ、つまり移動軌跡を選別するためのプログラムである。人間関係推定プログラム312は、検出された位置が特定領域に含まれていない人間の人間関係を、移動軌跡テーブルに記録された移動軌跡に基づいて推定するためのプログラムである。
【0044】
なお、図示は省略するが、中央制御装置10を動作させるためのプログラムには、LRF12によって得た位置を位置データに変換するためのプログラムなども含まれる。
【0045】
データ記憶領域304には、位置バッファ330および類似度バッファ332が設けられる。また、データ記憶領域304には、移動軌跡テーブルデータ334、関係人間テーブルデータ336、地図データ338および特定領域座標データ340が記憶される。
【0046】
位置バッファ330には、各人間の位置データが一時的に記憶される。類似度バッファ332には、DPマッチングなどを利用して算出された移動軌跡データの類似度が一時的に記憶される。
【0047】
移動軌跡テーブルデータ334は、図6に示すように構成されたテーブルデータである。関係人間テーブルデータ336は、図7に示すように構成されたテーブルデータである。地図データ338は、検出領域Eを示す地図のデータである。また、特定領域座標データ340は、図5(A),(B)に示す特定領域SAを示す座標から構成されているデータである。
【0048】
なお、図示は省略するが、データ記憶領域304には、様々な計算の結果を一時的に格納するバッファなどが設けられると共に、中央制御装置10の動作に必要な他のカウンタやフラグなども設けられる。
【0049】
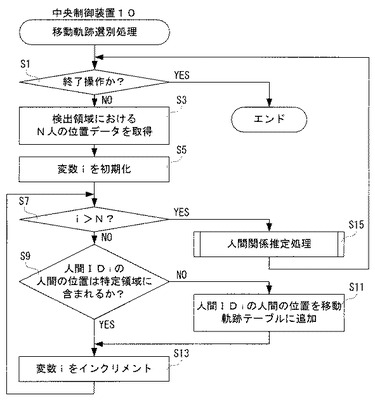
以下、中央制御装置10のCPU16によって実行されるプログラムについて説明する。図9のフロー図は移動軌跡選別プログラム310による処理を示し、図10のフロー図は人間関係推定プログラム312による処理を示す。
【0050】
図9は移動軌跡選別処理のフロー図である。中央制御装置10の電源がオンにされると、中央制御装置10のCPU16は、ステップS1で終了操作か否かを判断する。たとえば、中央制御装置10の電源をオフにする操作がされたか否かを判断する。ステップS1で“NO”であれば、つまり中央制御装置10の電源をオフにする操作がされなければ、ステップS3で検出領域EにおけるN人の位置データを取得する。たとえば、図5(B)に示すように、検出領域Eに5人の人間が存在していれば、変数Eが「5」となり、人間A−人間Eの位置データが位置バッファ330から取得される。続いて、ステップS5では、変数iを初期化する。変数iは人間IDを指定するための変数である。そのため、ステップS5の処理では、最初の人間ID「001」を指定するために、変数iには「1」が設定される。
【0051】
続いて、ステップS7では変数iが変数Nよりも大きいか否かを判断する。つまり、全ての人間IDのそれぞれと対応する各移動軌跡に対して、ステップS9−S13の処理が行われたか否かが判断される。ステップS7で“NO”であれば、つまり全ての人間IDと対応する移動軌跡に対してステップS9−S13の処理が行われていなければ、ステップS9で人間IDiの人間の位置は特定領域SAに含まれているか否かを判断する。たとえば、変数iが「1」であれば、人間ID「001(人間A)」の位置が、特定領域SAに含まれているか否かが判断される。また、具体的な処理としては、CPU16は、位置バッファ330に格納されている人間Aの位置データが、特定領域座標データ340によって示される座標範囲内に含まれているか否かを判断する。なお、ステップS9の処理を実行するCPU16は判断手段として機能する。
【0052】
ステップS9で“YES”であれば、たとえば変数iが「3」であれば、図5(B)に示すように、人間C(人間ID「003」)の位置が特定領域SAに含まれているため、ステップS13に進む。また、ステップS9で“NO”であれば、たとえば変数iが「1」であれば、図5(B)に示すように人間Aの位置が特定領域SAに含まれていないため、ステップS11で人間IDiの人間の位置を移動軌跡テーブルに追加する。つまり、図6に示すように、人間Aの位置データが移動軌跡テーブルに記録される。
【0053】
続いて、ステップS13では、変数iがインクリメントされる。たとえば、変数iが「1」であれば、ステップS13の処理が実行されると変数iは「2」にされる。そして、CPU16は、変数iをインクリメントすることで、次の人間IDを指定することができる。なお、ステップS13の処理が終了すると、ステップS7に戻る。
【0054】
そして、ステップS7で“YES”であれば、つまり複数の人間の位置のそれぞれに対して、特定領域SAに含まれるかが判断されると、ステップS15で人間関係推定処理が実行される。なお、人間関係推定処理については、図10に示すフロー図を用いて詳細に説明するため、ここでの詳細な説明は省略する。また、ステップS15の処理を実行するCPU16は推定手段として機能する。
【0055】
また、ステップS15の処理が終了すると、ステップS1に戻る。そして、ステップS1で“YES”であれば、たとえば中央制御装置10の電源がオフにされると、移動軌跡選別処理が終了する。
【0056】
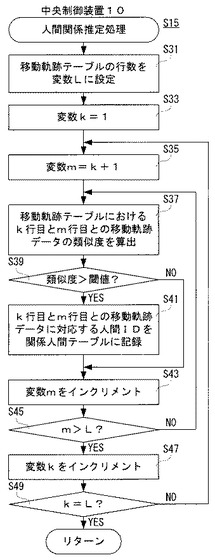
図10は人間関係推定処理のフロー図である。図9でステップS15の処理が実行されると、CPU16はステップS31で、移動軌跡テーブルの行数を変数Lに設定する。たとえば、移動軌跡テーブルが3行であれば、変数Lには「3」が設定される。続いて、ステップS33では、変数kに「1」を設定する。変数kは移動軌跡テーブルの行を指定するための変数である。そして、移動軌跡テーブルの1行目から処理を開始するために、ステップS33では変数kに「1」が設定される。続いて、ステップS35では、変数mに「k+1」を設定する。たとえば、変数kが「1」であれば、変数mには「2」が設定される。つまり、変数mは、変数kによって指定される行に対して、次の行を指定するための変数である。
【0057】
続いて、ステップS37では、移動軌跡テーブルにけるk行目とm行目との移動軌跡データの類似度を算出する。たとえば、変数kが「1」であり、変数mが「2」であれば、図6に示す移動軌跡テーブルでは、1行目と2行目とに示される人間Aと人間Bとの移動軌跡データの類似度が、DPマッチングを利用して算出される。なお、算出された類似度は類似度バッファ332に格納される。続いて、ステップS39では、算出された類似度が閾値よりも大きいか否かが判断される。たとえば、人間Aと人間Bとの移動軌跡データの類似度が閾値よりも大きいかが判断される。ステップS39で“NO”であれば、つまり類似度が閾値以下であればステップS43に進む。一方、ステップS39で“YES”であれば、類似度が閾値より大きければ、ステップS41でk行目とm行目との移動軌跡データに対応する人間IDを関係人間テーブルに記録する。たとえば、変数kが「1」であり、変数mが「2」であれば、図7に示す関係人間テーブルのように、人間ID「001」および人間ID「002」が記録される。
【0058】
続いて、ステップS43では、変数mをインクリメントする。たとえば、ステップS43の処理が実行される前の変数kが「1」であり、変数mが「2」であれば、1行目の移動軌跡データと、3行目以降の移動軌跡データとの類似度を算出するために、変数mがインクリメントされる。
【0059】
続いて、ステップS45では、変数mが変数Lよりも大きいかを判断する。つまり、k行目の移動軌跡データと「k+1」行目以降の移動軌跡データとの類似度が全て算出されたか否かを判断する。ステップS45で“NO”であれば、つまりk行目の移動軌跡データと「k+1」行目以降の移動軌跡データとの類似度が算出されていなければ、ステップS37に戻る。
【0060】
また、ステップS45で“YES”であれば、つまりk行目の移動軌跡データと「k+1」行目以降の移動軌跡データとの類似度が算出されると、ステップS47で変数kをインクリメントする。たとえば、変数kが「1」であれば、2行目の移動軌跡データと3行目以降の移動軌跡データとの類似度を算出するために変数kがインクリメントされる。
【0061】
続いて、ステップS49では、変数kが変数Lと一致したか否かを判断する。たとえば、全ての行の組み合わせで類似度の算出が完了すると、変数kと変数Lとの値が一致する。そのため、ステップS49では、全ての行の組み合わせで類似度の算出が完了したか否かが判断されている。ステップS49で“NO”であれば、つまり全ての行の組み合わせで類似度の算出が完了していなければ、ステップS35に戻る。一方、ステップS49で“YES”であれば、全ての行の組み合わせで類似度の算出が完了すれば、人間関係推定処理が終了し、移動軌跡選別処理に戻る。
【0062】
なお、類似度を算出するときに、移動軌跡データを構成する位置データが1つしかないことがある。この場合、人間関係は2人の距離に基づいて推定される。具体的には、人間関係推定処理のステップS37では、類似度として2人の距離値が算出される。また、ステップS39では、算出された距離値が閾値よりも小さければ“YES”と判断される。つまり、2人の距離に基づいて人間関係が推定される場合、2人の距離が閾値よりも短ければ、人間関係が有ると判断される。
【0063】
以上の説明から分かるように、関係推定システム100は、複数のLRF12を備える中央制御装置10を有する。LRF12は、たとえば、ショッピングモールの通路を通る人々の位置を検出する。この通路には、特に人通りが多い場所や、人が密集する場所が特定領域SAとして設定される。そして、複数の人間の位置のそれぞれがその特定領域SAに含まれているかが判断され、中央制御装置10は、特定領域SAに含まれていない人間の移動軌跡データに基づいて、人間関係の有無を推定する。
【0064】
したがって、関係推定システム100は、無関係な人々が頻繁に行き交ったり、集まったりする場所を除いて、人間関係を推定することができる。そのため、人々の人間関係を精度よく推定することができるようになる。
【0065】
なお、本実施例の人間関係推定処理では、所定時刻毎に人間関係が推定されている。そのため、時間が経過すると推定された人間関係が変化することが有る。たとえば、システムが起動した直後は、蓄積された位置データが少ないため、実際には人間関係が無くても、人間関係が有ると推定されることが有る。しかし、システムの稼働時間が長くなると蓄積された位置データが増えるため、人間関係が正しく推定されるようになる。
【0066】
また、他の実施例では、上記のように人間関係が変化するのを防ぐために、関係推定システム100が起動してから一定時間は、人間関係が推定されないようにされてもよい。この場合、移動軌跡判別処理のステップS15が実行される前に、システムが起動してから一定時間が経過したかを判断するステップが追加される。
【0067】
また、その他の実施例では、人間の性別や年齢に基づいて、推定された人間関係の「属性」を判定する。人間関係の「属性」とは、「家族」、「友達」および「カップル」などである。具体的に説明すると、人間の性別や、年齢が事前に登録されたRFIDタグを人間に所持させ、RFIDタグの電波強度を利用して、RFIDタグを所持する人間と、検出された人間とを対応付ける。そして、2人の男女に人間関係が推定されていれば、人間関係の属性を「カップル」と判断する。また、3人以上で同じ年代の集団に人間関係が推定されていれば、人間関係の属性を「友達」と判断する。さらに、3人以上で年齢の差が大きければ、人間関係の属性を「家族」と判断する。
【0068】
また、さらにその他の実施例では、検出領域E内に情報提供サービスを実施する自律移動型のロボットが配置されてもよい。そして、ロボットは、人間関係の属性が判定された人間に対して、提供する情報の内容を変化させる。たとえば、「カップル」の属性を持つ2人には、カップル向けのお店や、イベント情報が提供される。また、「友達」の属性を持つ3人以上の集団には、集団を構成する人間を収容可能な、飲食店などの情報が提供される。そして、「家族」の属性を持つ3人以上の集団には、その集団に属する最年少の人間(子ども)向けのイベント情報や、家族用のお店の情報などが提供される。
【0069】
また、他の実施例では、人間関係を推定する手法として、DPマッチングとは異なる手法が利用されてもよい。たとえば、検出領域Eにおいて、特定領域SAとは別に推定領域をさらに設ける。そして、特許文献1のように、その推定領域内の行動履歴に基づいて、人間関係が推定されてもよい。
【0070】
また、本実施例では、特定領域SAは、システムの管理者によって手動で設定されたが、他の実施例では自動的に設定されてもよい。たとえば、検出した人々の位置を蓄積し、上記「特開2010−231470号公報」に開示されている局所行動や大局行動の発生頻度を求め、その局所行動および大局行動の発生頻度が高い領域が、自動的に特定領域SAとして設定されてもよい。さらに、その他の実施例では、季節、イベントおよび時間帯などによって特定領域SAが変化してもよい。
【0071】
また、移動軌跡選別プログラム310および人間関係推定プログラム312は、データ配信用のサーバのHDDに記憶され、ネットワークを介して本実施例と同等の構成のシステムにおける中央制御装置などに配信されてもよい。また、CD, DVD, BD (Blu-ray Disc)などの光学ディスク、USBメモリおよびメモリカードなどの記憶媒体にこれらのプログラムを記憶させた状態で、その記憶媒体が販売または配布されてもよい。そして、上記したサーバや記憶媒体などを通じてダウンロードされた、移動軌跡選別プログラム310および人間関係推定プログラム312が、本実施例と同等の構成のシステムにおける中央制御装置にインストールされた場合、本実施例と同等の効果が得られる。
【0072】
そして、本明細書中で挙げた、人数、所定時間、距離、誤差、半径、角度および周波数などの具体的な数値は、いずれも単なる一例であり、製品の仕様などの必要に応じて適宜変更可能である。
【符号の説明】
【0073】
10 …中央制御装置
12a−12f …LRF
16 …CPU
18 …メモリ
【技術分野】
【0001】
この発明は、関係推定装置、関係推定システム、関係推定プログラムおよび関係推定方法に関し、特にたとえば、複数の人間の人間関係を推定する、関係推定装置、関係推定システム、関係推定プログラムおよび関係推定方法に関する。
【背景技術】
【0002】
特許文献1に開示されている、関係検知システムは、ロボットを中心とする所定領域内において、構成員の行動の履歴を記録する。そして、複数の構成員の行動の履歴に基づいて、構成員の他者との共存の仕方から、各構成員間の関係が把握される。
【0003】
また、特許文献2に開示されている、関係検知システムでは、無線タグが取り付けられている人間の移動軌跡が記録される。そして、複数の人間の移動軌跡に基づいて、人間同士の友好関係を把握することができる。
【特許文献1】特開2005−131748号公報[B25J 13/00, B25J 5/00]
【特許文献2】特開2005−327156号公報[G06F 19/00, G01V 15/00, G06K 17/00, H04B 5/02]
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところが、集まりが起きる広場では人間関係と関係なく同時存在が起きるため、特許文献1の関係検知システムでは人間関係の検出精度が低下してしまう。また、多くの人々が行き交う街角や、流れがある通路では多くの移動軌跡が類似したものになるため、特許文献2の関係検知システムでは友好関係を正しく把握できないことがある。
【0005】
それゆえに、この発明の主たる目的は、新規な、関係推定装置、関係推定システム、関係推定プログラムおよび関係推定方法を提供することである。
【0006】
この発明の他の目的は、人間関係を精度よく推定することができる、関係推定装置、関係推定システム、関係推定プログラムおよび関係推定方法を提供することである。
【課題を解決するための手段】
【0007】
この発明は、上記の課題を解決するために、以下の構成を採用した。なお、括弧内の参照符号および補足説明等は、この発明の理解を助けるために記述する実施形態との対応関係を示したものであって、この発明を何ら限定するものではない。
【0008】
第1の発明は、空間内に存在する複数の人間のそれぞれの位置を検出する検出手段を有する、関係推定装置であって、複数の人間の位置のそれぞれが特定領域に含まれているかを判断する判断手段、および特定領域に含まれていない少なくとも2人以上の人間のそれぞれの位置に基づいて、人間関係を推定する推定手段を備える、関係推定装置である。
【0009】
第1の発明では、関係推定装置(10:実施例において対応する部分を例示する参照符号。以下、同じ。)は、検出手段(12)は、たとえば複数のLRFであり、それらのLRFから照射されたレーザーによって、空間内に存在する複数の人間のそれぞれの位置が検出される。また、空間内において、人通りが多い場所や、人が密集する場所が特定領域(SA)とされる。さらに、判断手段(16,S9)は、複数の人間の位置のそれぞれがその特定領域に含まれているかを判断する。そして、推定手段(16,S15)は、たとえば、特定領域に含まれていない2人の位置に基づいて、人間関係の有無を推定する。
【0010】
第1の発明によれば、無関係な人々が頻繁に行き交ったり、集まったりする場所を除いて、人間関係を推定することができる。そのため、人々の人間関係を精度よく推定することができるようになる。
【0011】
第2の発明は、空間内に存在する複数の人間のそれぞれの位置を検出する検出手段(12)を有する、関係推定システム(100)であって、複数の人間の位置のそれぞれが特定領域に含まれているかを判断する判断手段(16,S9)、および特定領域に含まれていない少なくとも2人以上の人間のそれぞれの位置に基づいて、人間関係を推定する推定手段(16,S15)を備える、関係推定システムである。
【0012】
第2の発明でも、第1の発明と同様、無関係な人々が頻繁に行き交ったり、集まったりする場所を除いて、人間関係を推定することができる。そのため、人々の人間関係を精度よく推定することができるようになる。
【0013】
第3の発明は、空間内に存在する複数の人間のそれぞれの位置を検出する検出手段(12)を有する、関係推定装置(10)のプロセッサ(16)を、複数の人間の位置のそれぞれが特定領域に含まれているかを判断する判断手段(S9)、および特定領域に含まれていない少なくとも2人以上の人間のそれぞれの位置に基づいて、人間関係を推定する推定手段(S15)として機能させる、関係推定プログラムである。
【0014】
第3の発明でも、第1の発明と同様、無関係な人々が頻繁に行き交ったり、集まったりする場所を除いて、人間関係を推定することができる。そのため、人々の人間関係を精度よく推定することができるようになる。
【0015】
第4の発明は、空間内に存在する複数の人間のそれぞれの位置を検出する検出手段(12)を有する、関係推定装置(10)の関係推定方法であって、複数の人間の位置のそれぞれが特定領域に含まれているかを判断し(S9)、そして特定領域に含まれていない少なくとも2人以上の人間のそれぞれの位置に基づいて、人間関係を推定する(S15)、関係推定方法である。
【0016】
第4の発明でも、第1の発明と同様、無関係な人々が頻繁に行き交ったり、集まったりする場所を除いて、人間関係を推定することができる。そのため、人々の人間関係を精度よく推定することができるようになる。
【発明の効果】
【0017】
この発明によれば、無関係な人々が頻繁に行き交ったり、集まったりする場所を除いて、人々の人間関係が推定されるため、人間関係の推定の精度を向上させることができる。
【0018】
この発明の上述の目的、その他の目的、特徴および利点は、図面を参照して行う以下の実施例の詳細な説明から一層明らかとなろう。
【図面の簡単な説明】
【0019】
【図1】図1はこの発明の一実施例の関係推定システムの概要を示す図解図である。
【図2】図2は図1に示す中央制御装置の電気的な構成を示すブロック図である。
【図3】図3は図1および図2に示すLRFの計測領域を示す図解図である。
【図4】図4は図3に示すLRFを利用して検出された移動軌跡の一例を示す図解図である。
【図5】図5は図1に示すLRFが設置される或る場所の地図を示す図解図である。
【図6】図6は図2に示すメモリに記憶される移動軌跡テーブルの一例を示す図解図である。
【図7】図7は図2に示すメモリに記憶される関係人間テーブルの一例を示す図解図である。
【図8】図8は図2に示すメモリのメモリマップの一例を示す図解図である。
【図9】図9は図2に示すCPUの移動軌跡選別処理を示すフロー図である。
【図10】図10は図2に示すCPUの人間関係推定処理を示すフロー図である。
【発明を実施するための形態】
【0020】
図1を参照して、この実施例の関係推定システム100は、LRF12a,12bを含む数台のLRFを有する中央制御装置10を備える。LRF12a,12bは、人間が任意に移動することができる場所(空間または環境)に設置される。人間が任意に行動する場所は、会社のフロア、博物館、ショッピングモールまたはアトラクション会場などであり、LRF12a,12bは様々な場所に設置される。なお、この空間には、システムの管理者によって特定領域SAが設定されている。また、この特定領域SAについては後述するため、ここでの詳細な説明は省略する。
【0021】
中央制御装置10は、所定時間(たとえば、1秒)毎にLRF12a,12bによって、任意に移動する人間の位置を検出し、検出された位置のデータを記憶する。また、中央制御装置10は、記憶された位置データに基づいて、少なくとも2人以上の人間の人間関係を推定する。
【0022】
また、位置が検出された人間には、検出された順番に人間IDが付与される。たとえば、図1では、人間Aには人間ID「001」が付与され、人間Bには人間ID「002」が付与され、人間Cには人間ID「003」が付与され、人間Dには人間ID「004」が付与され、人間Eには人間ID「005」が付与される。
【0023】
なお、図1では簡単のため人間は5人しか示していないが、中央制御装置10はさらに多くの人間の位置データおよび移動軌跡データを同時に検出することができる。また、中央制御装置10は関係推定装置と言われることもある。
【0024】
図2は中央制御装置10の電気的な構成を示すブロック図である。図2を参照して、中央制御装置10は、LRF12a−12f、CPU16およびメモリ18を含む。CPU16は、マイクロコンピュータ或いはプロセッサとも呼ばれ、時刻情報を出力するRTC16aを含む。また、CPU16には、先述したLRF12aおよびLRF12bに加えて、LRF12c,LRF12d,LRF12eおよびLRF12fも接続される。さらに、CPU16にはメモリ18も接続される。なお、LRF12a−12fを区別する必要がない場合、「LRF12」と言う。
【0025】
LRF12は、レーザーを照射し、物体(人間も含む)に反射して戻ってくるまでの時間から当該物体までの距離を計測するものである。たとえば、トランスミッタ(図示せず)から照射したレーザーを回転ミラー(図示せず)で反射させて、前方を扇状に一定角度(たとえば、0.5度)ずつスキャンする。ここで、LRF12としては、SICK社製のレーザーレンジファインダ(型式 LMS200)を用いることができる。このレーザーレンジファインダを用いた場合には、距離8mを±15mm程度の誤差で計測可能である。
【0026】
メモリ18は、図示は省略をするが、ROM,HDDおよびRAMを含む。ROMおよびHDDには、中央制御装置10の動作を制御するための制御プログラムが予め記憶される。また、RAMは、CPU16のワークメモリやバッファメモリとして用いられる。
【0027】
なお、検出された人間の位置は、位置データとして記憶される際に、RTC16aが出力する時刻情報が関連付けられる。
【0028】
次に、LRF12について詳細に説明する。図3を参照して、LRF12の計測範囲は、半径r(r≒8m)の半円形状(扇形)で示される。つまり、LRF12は、その正面方向を中心とした場合に、左右90度の方向を所定の距離(r)以内で計測可能である。
【0029】
また、使用しているレーザーは、日本工業規格 JIS C 6802「レーザー製品の安全基準」におけるクラス1レーザーであり、人の眼に対して影響を及ぼさない安全なレベルである。また、この実施例では、LRF12のサンプリングレートを37Hzとした。これは、歩行するなどにより移動する人間の位置を連続して検出するためである。
【0030】
さらに、LRF12の各々は、計測範囲が重なるように配置され、図示は省略するが、床面から約90cmの高さに固定される。この高さは、被験者の胴体と腕(両腕)とを検出可能とするためであり、たとえば、日本人の成人の平均身長から算出される。したがって、中央制御装置10を設ける場所(地域ないし国)や被験者の年齢ないし年代(たとえば、子供,大人)に応じて、LRF12を固定する高さを適宜変更するようにしてよい。なお、本実施例では、設定されるLRF12は6台としたが、2台以上であれば、任意の台数のLRF12が設置されてもよい。
【0031】
このような構成の中央制御装置10では、CPU16がLRF12からの出力(距離データ)に基づいて、パーティクルフィルタを用いて、人間の現在位置の変化を推定する。そして、推定された位置の変化が移動軌跡として記録される。
【0032】
たとえば、図4を参照して、LRF12a,12bは互いに向い合せに設置され、LRF12a,12bの計測範囲が重なる範囲は斜線が付されて示される。斜線が付された範囲は検出領域Eとされ、この検出領域E内では人間の位置が連続的に検出される。そして、連続的に検出された位置の変化が移動軌跡Tとなる。つまり、移動軌跡データは、複数の位置データから構成される。なお、検出領域EにはX−Y座標が設定され、人間の位置データは(X,Y)の座標で示すことができる。
【0033】
図5(A)はLRF12が設置される場所を示す地図を示す図解図である。図5(A)を参照して、地図が対応する場所は或るショッピングモールである。また、地図の左下側には店舗が示され、右上の中央付近にはショッピングモール内を案内するための案内図が示される。また、地図の右下には休憩スペースが設けられている。また、図5(A)の地図では、ショッピングモールの通路が検出領域Eである。そして、その検出領域E(通路)において、人通りが多い領域が特定領域SAとされる。
【0034】
図5(B)を参照して、人間Aおよび人間Bには人間関係が有り、2人は共に店舗から休憩スペースに移動している。また、人間C、人間Dおよび人間Eのそれぞれには人間関係は無く、3人はそれぞれが異なる目的を持って通路を移動している。人間Cの目的は案内図を見つけることであり、人間Dの目的は通路を通り抜けることであり、人間Eの目的は店舗に向かうことである。ただし、人間C、人間Dおよび人間Eは、略同時に検出領域E内に入っているため、ショッピングモールの通路に入ってからしばらくの間は、この3人の移動軌跡は似た形状になる。
【0035】
ここで、検出領域Eで検出された全ての移動軌跡の類似度に基づいて人間関係を推定した場合、人間Aおよび人間Bに対して人間関係が有ると推定されるだけでなく、人間C、人間Dおよび人間Eに対しても人間関係が有ると推定されてしまう。
【0036】
そこで、本実施例では、人通りが多い特定領域SAに存在する人間については、人間関係が推定されないようにする。具体的には、検出領域E内の全ての人間の位置が検出されたとき、検出された人間の位置が特定領域SAに含まれていなければ、その人間の位置データは移動軌跡テーブルに記録される。また、人間の位置が特定領域SAに含まれていれば、その人間の位置データは移動軌跡テーブルに記録されることは無い。そして、中央制御装置10は、移動軌跡テーブルに記録された移動軌跡データに基づいて、少なくとも2人以上の人間の人間関係を推定する。つまり、特定領域SAに存在する人間は位置データが記録されないため、人間関係が推定されない。
【0037】
たとえば、図5(B)における人間Aおよび人間Bの位置は特定領域SAに含まれていないため、2人の移動軌跡データは図6に示す移動軌跡テーブルに記録される。図6を参照して、この移動軌跡テーブルは人間IDおよび移動軌跡データの列から構成される。また、人間IDの列には人間ID「001」および人間ID「002」などが記録される。移動軌跡データの列には、人間IDの欄に対応して、所定時間毎に連続して検出された位置データを表す座標が記録される。たとえば、人間ID「001(人間A)」に対応して、移動軌跡データの列には「(Xa1,Ya1),(Xa2,Ya2),…」が記録される。また、人間ID「002(人間B)」に対応して、移動軌跡データの列には、「(Xb1,Yb1),(Xb2,Yb2),…」が記録される。そして、移動軌跡テーブルにおいて、一行毎に記録されている複数の位置(座標)データが、移動軌跡データを表す。
【0038】
また、本実施例では、移動軌跡テーブルに記録された移動軌跡データから人間関係を推定するために、DPマッチングが利用される。この場合、まず、移動軌跡データは全て状態列に変換される。次に、変換された状態列毎にDPマッチングによって類似度が算出される。そして、算出された類似度が閾値より大きい、状態列の組み合わせがある場合、その組み合わせに対応する2人の人間に対して、人間関係が有ると推定される。なお、DPマッチングを利用して移動軌跡を比較する手法については、同じ出願人の出願に係る同時係属中の特開2010−231470号公報に開示されているため、詳細な説明は省略する。
【0039】
また、人間関係が有ると推定されると、推定された人間の人間IDが、推定結果として関係人間テーブルに記憶される。図7を参照して、図5(B)に示す人間Aと人間Bとに人間関係が有ると推定された場合、2人の人間ID「001」、「002」が関係人間テーブルに記憶される。
【0040】
なお、ここでは記録される人間IDが2人分だけだが、3人以上の人間に1つの人間関係が有ると推定された場合、関係人間テーブルの1つの欄には、3人以上の人間の人間IDが記録される。たとえば、3人の家族に対して人間関係が有ると推定された場合、関係人間テーブルには、その3人の人間IDが1つの欄に記録される。また、関係人間テーブルには、人間IDと共に算出された類似度が記録されてもよい。
【0041】
このように、本実施例では、日常的に人通りが多かったり、人が集まりやすかったりする領域を特定領域SAとし、その特定領域SAに存在する人間については人間関係が推定さないように出来る。そのため、人間関係の推定精度を向上させることができる。
【0042】
図8は図2に示す中央制御装置10におけるメモリ18のメモリマップ300の一例を示す図解図である。図8で示すように、メモリ18はプログラム記憶領域302およびデータ記憶領域304を含む。プログラム記憶領域302には、中央制御装置10を動作させるためのプログラムとして、移動軌跡選別プログラム310および人間関係推定プログラム312などが記憶される。
【0043】
移動軌跡選別プログラム310は、連続的に記録される位置データ、つまり移動軌跡を選別するためのプログラムである。人間関係推定プログラム312は、検出された位置が特定領域に含まれていない人間の人間関係を、移動軌跡テーブルに記録された移動軌跡に基づいて推定するためのプログラムである。
【0044】
なお、図示は省略するが、中央制御装置10を動作させるためのプログラムには、LRF12によって得た位置を位置データに変換するためのプログラムなども含まれる。
【0045】
データ記憶領域304には、位置バッファ330および類似度バッファ332が設けられる。また、データ記憶領域304には、移動軌跡テーブルデータ334、関係人間テーブルデータ336、地図データ338および特定領域座標データ340が記憶される。
【0046】
位置バッファ330には、各人間の位置データが一時的に記憶される。類似度バッファ332には、DPマッチングなどを利用して算出された移動軌跡データの類似度が一時的に記憶される。
【0047】
移動軌跡テーブルデータ334は、図6に示すように構成されたテーブルデータである。関係人間テーブルデータ336は、図7に示すように構成されたテーブルデータである。地図データ338は、検出領域Eを示す地図のデータである。また、特定領域座標データ340は、図5(A),(B)に示す特定領域SAを示す座標から構成されているデータである。
【0048】
なお、図示は省略するが、データ記憶領域304には、様々な計算の結果を一時的に格納するバッファなどが設けられると共に、中央制御装置10の動作に必要な他のカウンタやフラグなども設けられる。
【0049】
以下、中央制御装置10のCPU16によって実行されるプログラムについて説明する。図9のフロー図は移動軌跡選別プログラム310による処理を示し、図10のフロー図は人間関係推定プログラム312による処理を示す。
【0050】
図9は移動軌跡選別処理のフロー図である。中央制御装置10の電源がオンにされると、中央制御装置10のCPU16は、ステップS1で終了操作か否かを判断する。たとえば、中央制御装置10の電源をオフにする操作がされたか否かを判断する。ステップS1で“NO”であれば、つまり中央制御装置10の電源をオフにする操作がされなければ、ステップS3で検出領域EにおけるN人の位置データを取得する。たとえば、図5(B)に示すように、検出領域Eに5人の人間が存在していれば、変数Eが「5」となり、人間A−人間Eの位置データが位置バッファ330から取得される。続いて、ステップS5では、変数iを初期化する。変数iは人間IDを指定するための変数である。そのため、ステップS5の処理では、最初の人間ID「001」を指定するために、変数iには「1」が設定される。
【0051】
続いて、ステップS7では変数iが変数Nよりも大きいか否かを判断する。つまり、全ての人間IDのそれぞれと対応する各移動軌跡に対して、ステップS9−S13の処理が行われたか否かが判断される。ステップS7で“NO”であれば、つまり全ての人間IDと対応する移動軌跡に対してステップS9−S13の処理が行われていなければ、ステップS9で人間IDiの人間の位置は特定領域SAに含まれているか否かを判断する。たとえば、変数iが「1」であれば、人間ID「001(人間A)」の位置が、特定領域SAに含まれているか否かが判断される。また、具体的な処理としては、CPU16は、位置バッファ330に格納されている人間Aの位置データが、特定領域座標データ340によって示される座標範囲内に含まれているか否かを判断する。なお、ステップS9の処理を実行するCPU16は判断手段として機能する。
【0052】
ステップS9で“YES”であれば、たとえば変数iが「3」であれば、図5(B)に示すように、人間C(人間ID「003」)の位置が特定領域SAに含まれているため、ステップS13に進む。また、ステップS9で“NO”であれば、たとえば変数iが「1」であれば、図5(B)に示すように人間Aの位置が特定領域SAに含まれていないため、ステップS11で人間IDiの人間の位置を移動軌跡テーブルに追加する。つまり、図6に示すように、人間Aの位置データが移動軌跡テーブルに記録される。
【0053】
続いて、ステップS13では、変数iがインクリメントされる。たとえば、変数iが「1」であれば、ステップS13の処理が実行されると変数iは「2」にされる。そして、CPU16は、変数iをインクリメントすることで、次の人間IDを指定することができる。なお、ステップS13の処理が終了すると、ステップS7に戻る。
【0054】
そして、ステップS7で“YES”であれば、つまり複数の人間の位置のそれぞれに対して、特定領域SAに含まれるかが判断されると、ステップS15で人間関係推定処理が実行される。なお、人間関係推定処理については、図10に示すフロー図を用いて詳細に説明するため、ここでの詳細な説明は省略する。また、ステップS15の処理を実行するCPU16は推定手段として機能する。
【0055】
また、ステップS15の処理が終了すると、ステップS1に戻る。そして、ステップS1で“YES”であれば、たとえば中央制御装置10の電源がオフにされると、移動軌跡選別処理が終了する。
【0056】
図10は人間関係推定処理のフロー図である。図9でステップS15の処理が実行されると、CPU16はステップS31で、移動軌跡テーブルの行数を変数Lに設定する。たとえば、移動軌跡テーブルが3行であれば、変数Lには「3」が設定される。続いて、ステップS33では、変数kに「1」を設定する。変数kは移動軌跡テーブルの行を指定するための変数である。そして、移動軌跡テーブルの1行目から処理を開始するために、ステップS33では変数kに「1」が設定される。続いて、ステップS35では、変数mに「k+1」を設定する。たとえば、変数kが「1」であれば、変数mには「2」が設定される。つまり、変数mは、変数kによって指定される行に対して、次の行を指定するための変数である。
【0057】
続いて、ステップS37では、移動軌跡テーブルにけるk行目とm行目との移動軌跡データの類似度を算出する。たとえば、変数kが「1」であり、変数mが「2」であれば、図6に示す移動軌跡テーブルでは、1行目と2行目とに示される人間Aと人間Bとの移動軌跡データの類似度が、DPマッチングを利用して算出される。なお、算出された類似度は類似度バッファ332に格納される。続いて、ステップS39では、算出された類似度が閾値よりも大きいか否かが判断される。たとえば、人間Aと人間Bとの移動軌跡データの類似度が閾値よりも大きいかが判断される。ステップS39で“NO”であれば、つまり類似度が閾値以下であればステップS43に進む。一方、ステップS39で“YES”であれば、類似度が閾値より大きければ、ステップS41でk行目とm行目との移動軌跡データに対応する人間IDを関係人間テーブルに記録する。たとえば、変数kが「1」であり、変数mが「2」であれば、図7に示す関係人間テーブルのように、人間ID「001」および人間ID「002」が記録される。
【0058】
続いて、ステップS43では、変数mをインクリメントする。たとえば、ステップS43の処理が実行される前の変数kが「1」であり、変数mが「2」であれば、1行目の移動軌跡データと、3行目以降の移動軌跡データとの類似度を算出するために、変数mがインクリメントされる。
【0059】
続いて、ステップS45では、変数mが変数Lよりも大きいかを判断する。つまり、k行目の移動軌跡データと「k+1」行目以降の移動軌跡データとの類似度が全て算出されたか否かを判断する。ステップS45で“NO”であれば、つまりk行目の移動軌跡データと「k+1」行目以降の移動軌跡データとの類似度が算出されていなければ、ステップS37に戻る。
【0060】
また、ステップS45で“YES”であれば、つまりk行目の移動軌跡データと「k+1」行目以降の移動軌跡データとの類似度が算出されると、ステップS47で変数kをインクリメントする。たとえば、変数kが「1」であれば、2行目の移動軌跡データと3行目以降の移動軌跡データとの類似度を算出するために変数kがインクリメントされる。
【0061】
続いて、ステップS49では、変数kが変数Lと一致したか否かを判断する。たとえば、全ての行の組み合わせで類似度の算出が完了すると、変数kと変数Lとの値が一致する。そのため、ステップS49では、全ての行の組み合わせで類似度の算出が完了したか否かが判断されている。ステップS49で“NO”であれば、つまり全ての行の組み合わせで類似度の算出が完了していなければ、ステップS35に戻る。一方、ステップS49で“YES”であれば、全ての行の組み合わせで類似度の算出が完了すれば、人間関係推定処理が終了し、移動軌跡選別処理に戻る。
【0062】
なお、類似度を算出するときに、移動軌跡データを構成する位置データが1つしかないことがある。この場合、人間関係は2人の距離に基づいて推定される。具体的には、人間関係推定処理のステップS37では、類似度として2人の距離値が算出される。また、ステップS39では、算出された距離値が閾値よりも小さければ“YES”と判断される。つまり、2人の距離に基づいて人間関係が推定される場合、2人の距離が閾値よりも短ければ、人間関係が有ると判断される。
【0063】
以上の説明から分かるように、関係推定システム100は、複数のLRF12を備える中央制御装置10を有する。LRF12は、たとえば、ショッピングモールの通路を通る人々の位置を検出する。この通路には、特に人通りが多い場所や、人が密集する場所が特定領域SAとして設定される。そして、複数の人間の位置のそれぞれがその特定領域SAに含まれているかが判断され、中央制御装置10は、特定領域SAに含まれていない人間の移動軌跡データに基づいて、人間関係の有無を推定する。
【0064】
したがって、関係推定システム100は、無関係な人々が頻繁に行き交ったり、集まったりする場所を除いて、人間関係を推定することができる。そのため、人々の人間関係を精度よく推定することができるようになる。
【0065】
なお、本実施例の人間関係推定処理では、所定時刻毎に人間関係が推定されている。そのため、時間が経過すると推定された人間関係が変化することが有る。たとえば、システムが起動した直後は、蓄積された位置データが少ないため、実際には人間関係が無くても、人間関係が有ると推定されることが有る。しかし、システムの稼働時間が長くなると蓄積された位置データが増えるため、人間関係が正しく推定されるようになる。
【0066】
また、他の実施例では、上記のように人間関係が変化するのを防ぐために、関係推定システム100が起動してから一定時間は、人間関係が推定されないようにされてもよい。この場合、移動軌跡判別処理のステップS15が実行される前に、システムが起動してから一定時間が経過したかを判断するステップが追加される。
【0067】
また、その他の実施例では、人間の性別や年齢に基づいて、推定された人間関係の「属性」を判定する。人間関係の「属性」とは、「家族」、「友達」および「カップル」などである。具体的に説明すると、人間の性別や、年齢が事前に登録されたRFIDタグを人間に所持させ、RFIDタグの電波強度を利用して、RFIDタグを所持する人間と、検出された人間とを対応付ける。そして、2人の男女に人間関係が推定されていれば、人間関係の属性を「カップル」と判断する。また、3人以上で同じ年代の集団に人間関係が推定されていれば、人間関係の属性を「友達」と判断する。さらに、3人以上で年齢の差が大きければ、人間関係の属性を「家族」と判断する。
【0068】
また、さらにその他の実施例では、検出領域E内に情報提供サービスを実施する自律移動型のロボットが配置されてもよい。そして、ロボットは、人間関係の属性が判定された人間に対して、提供する情報の内容を変化させる。たとえば、「カップル」の属性を持つ2人には、カップル向けのお店や、イベント情報が提供される。また、「友達」の属性を持つ3人以上の集団には、集団を構成する人間を収容可能な、飲食店などの情報が提供される。そして、「家族」の属性を持つ3人以上の集団には、その集団に属する最年少の人間(子ども)向けのイベント情報や、家族用のお店の情報などが提供される。
【0069】
また、他の実施例では、人間関係を推定する手法として、DPマッチングとは異なる手法が利用されてもよい。たとえば、検出領域Eにおいて、特定領域SAとは別に推定領域をさらに設ける。そして、特許文献1のように、その推定領域内の行動履歴に基づいて、人間関係が推定されてもよい。
【0070】
また、本実施例では、特定領域SAは、システムの管理者によって手動で設定されたが、他の実施例では自動的に設定されてもよい。たとえば、検出した人々の位置を蓄積し、上記「特開2010−231470号公報」に開示されている局所行動や大局行動の発生頻度を求め、その局所行動および大局行動の発生頻度が高い領域が、自動的に特定領域SAとして設定されてもよい。さらに、その他の実施例では、季節、イベントおよび時間帯などによって特定領域SAが変化してもよい。
【0071】
また、移動軌跡選別プログラム310および人間関係推定プログラム312は、データ配信用のサーバのHDDに記憶され、ネットワークを介して本実施例と同等の構成のシステムにおける中央制御装置などに配信されてもよい。また、CD, DVD, BD (Blu-ray Disc)などの光学ディスク、USBメモリおよびメモリカードなどの記憶媒体にこれらのプログラムを記憶させた状態で、その記憶媒体が販売または配布されてもよい。そして、上記したサーバや記憶媒体などを通じてダウンロードされた、移動軌跡選別プログラム310および人間関係推定プログラム312が、本実施例と同等の構成のシステムにおける中央制御装置にインストールされた場合、本実施例と同等の効果が得られる。
【0072】
そして、本明細書中で挙げた、人数、所定時間、距離、誤差、半径、角度および周波数などの具体的な数値は、いずれも単なる一例であり、製品の仕様などの必要に応じて適宜変更可能である。
【符号の説明】
【0073】
10 …中央制御装置
12a−12f …LRF
16 …CPU
18 …メモリ
【特許請求の範囲】
【請求項1】
空間内に存在する複数の人間のそれぞれの位置を検出する検出手段を有する、関係推定装置であって、
前記複数の人間の位置のそれぞれが特定領域に含まれているかを判断する判断手段、および
前記特定領域に含まれていない少なくとも2人以上の人間のそれぞれの位置に基づいて、人間関係を推定する推定手段を備える、関係推定装置。
【請求項2】
空間内に存在する複数の人間のそれぞれの位置を検出する検出手段を有する、関係推定システムであって、
前記複数の人間の位置のそれぞれが特定領域に含まれているかを判断する判断手段、および
前記特定領域に含まれていない少なくとも2人以上の人間のそれぞれの位置に基づいて、人間関係を推定する推定手段を備える、関係推定システム。
【請求項3】
空間内に存在する複数の人間のそれぞれの位置を検出する検出手段を有する、関係推定装置のプロセッサを、
前記複数の人間の位置のそれぞれが特定領域に含まれているかを判断する判断手段、および
前記特定領域に含まれていない少なくとも2人以上の人間のそれぞれの位置に基づいて、人間関係を推定する推定手段として機能させる、関係推定プログラム。
【請求項4】
空間内に存在する複数の人間のそれぞれの位置を検出する検出手段を有する、関係推定装置の関係推定方法であって、
前記複数の人間の位置のそれぞれが特定領域に含まれているかを判断し、そして
前記特定領域に含まれていない少なくとも2人以上の人間のそれぞれの位置に基づいて、人間関係を推定する、関係推定方法。
【請求項1】
空間内に存在する複数の人間のそれぞれの位置を検出する検出手段を有する、関係推定装置であって、
前記複数の人間の位置のそれぞれが特定領域に含まれているかを判断する判断手段、および
前記特定領域に含まれていない少なくとも2人以上の人間のそれぞれの位置に基づいて、人間関係を推定する推定手段を備える、関係推定装置。
【請求項2】
空間内に存在する複数の人間のそれぞれの位置を検出する検出手段を有する、関係推定システムであって、
前記複数の人間の位置のそれぞれが特定領域に含まれているかを判断する判断手段、および
前記特定領域に含まれていない少なくとも2人以上の人間のそれぞれの位置に基づいて、人間関係を推定する推定手段を備える、関係推定システム。
【請求項3】
空間内に存在する複数の人間のそれぞれの位置を検出する検出手段を有する、関係推定装置のプロセッサを、
前記複数の人間の位置のそれぞれが特定領域に含まれているかを判断する判断手段、および
前記特定領域に含まれていない少なくとも2人以上の人間のそれぞれの位置に基づいて、人間関係を推定する推定手段として機能させる、関係推定プログラム。
【請求項4】
空間内に存在する複数の人間のそれぞれの位置を検出する検出手段を有する、関係推定装置の関係推定方法であって、
前記複数の人間の位置のそれぞれが特定領域に含まれているかを判断し、そして
前記特定領域に含まれていない少なくとも2人以上の人間のそれぞれの位置に基づいて、人間関係を推定する、関係推定方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2012−128700(P2012−128700A)
【公開日】平成24年7月5日(2012.7.5)
【国際特許分類】
【出願番号】特願2010−280018(P2010−280018)
【出願日】平成22年12月16日(2010.12.16)
【国等の委託研究の成果に係る記載事項】(出願人による申告)JST戦略的創造研究推進事業/チーム型研究(CREST)、研究領域「共生社会に向けた人間調和型情報技術の構築」、研究課題名「ロボットによる街角の情報環境の構築」、産業技術力強化法第19条の適用を受ける特許出願
【出願人】(393031586)株式会社国際電気通信基礎技術研究所 (905)
【公開日】平成24年7月5日(2012.7.5)
【国際特許分類】
【出願日】平成22年12月16日(2010.12.16)
【国等の委託研究の成果に係る記載事項】(出願人による申告)JST戦略的創造研究推進事業/チーム型研究(CREST)、研究領域「共生社会に向けた人間調和型情報技術の構築」、研究課題名「ロボットによる街角の情報環境の構築」、産業技術力強化法第19条の適用を受ける特許出願
【出願人】(393031586)株式会社国際電気通信基礎技術研究所 (905)
[ Back to top ]