
関節撮影装置
【課題】患者に負担をかけることなく撮影対象をしっかりと固定でき、位置ずれやぶれ等を生じにくい被写体台を備えた関節撮影装置を提供する。
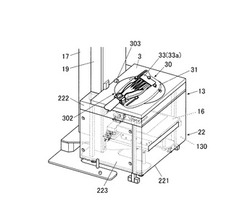
【解決手段】被写体を撮影位置に保持する被写体台13と、被写体台13の上方に配置され、被写体の撮影対象領域である手指の関節部分に放射線を照射するX線源11、及び被写体台13の下方に配置され、関節部分を透過した放射線を検出するX線検出器16を有する支柱17及び基台部19と、を有する関節撮影装置1であって、被写体台13は、撮影対象部分である関節部分をX線源11からのX線照射方向に対して所定の位置に固定する撮影対象固定ユニット33と撮影対象固定ユニット33を着脱可能に構成され、被写体の手首部分を固定するベースユニット31とを備えている。
【解決手段】被写体を撮影位置に保持する被写体台13と、被写体台13の上方に配置され、被写体の撮影対象領域である手指の関節部分に放射線を照射するX線源11、及び被写体台13の下方に配置され、関節部分を透過した放射線を検出するX線検出器16を有する支柱17及び基台部19と、を有する関節撮影装置1であって、被写体台13は、撮影対象部分である関節部分をX線源11からのX線照射方向に対して所定の位置に固定する撮影対象固定ユニット33と撮影対象固定ユニット33を着脱可能に構成され、被写体の手首部分を固定するベースユニット31とを備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、関節撮影装置に関する。
【背景技術】
【0002】
手・脚等の関節部分の軟骨や関節周辺の軟部組織は、従来の吸収コントラスト法によるX線撮影では診断に適した画像を得ることができないため、関節等のリウマチ診断には、主としてMRIで撮影された画像が用いられてきた。
しかしMRIによる撮影は、患者体位を所定時間機械的に拘束する等の患者負担大きく、また、医療費コストがかかるため、一般的な放射線管球を用いて撮影されたX線画像をリウマチ診断に利用する技術が望まれている。
【0003】
この点、MRIに代わる撮影手法として、例えば、位相コントラスト拡大撮影時のX線の屈折を利用したエッジ強調によって視認性の高いX線画像を得る位相コントラスト法によりX線撮影が提案されている(例えば、特許文献1から特許文献3参照)。
また、位相コントラスト撮影の1つとして、タルボ効果を利用するタルボ干渉計、タルボロー干渉計も検討されている(例えば、特許文献4から特許文献6参照)。タルボ効果とは、一定の周期でスリットが設けられた第1格子を干渉性の光が透過すると、光の進行方向に一定周期でその格子像を結ぶ現象をいう。この格子像は自己像と呼ばれ、タルボ干渉計は自己像を結ぶ位置に第2格子を配置し、この第2格子をわずかにずらすことで生じる干渉縞(モアレ)を測定する。第2格子の前に物体を配置するとモアレが乱れることから、タルボ干渉計によりX線撮影を行うのであれば、第1格子の前に被写体を配置して干渉性X線を照射し、得られたモアレの画像を演算することによって被写体の再構成画像を得ることが可能である。
さらに、1次元または2次元格子を用い、タルボ方式のような走査を不要とするフーリエ変換方式等も開発されている。
【0004】
このような位相コントラスト法を用いたX線撮影は、X線吸収差が小さく、吸収コントラスト法によっては画像として現れにくい乳房の組織や関節軟骨、関節周辺の軟部組織をも画像化することが可能であることから、広く普及している一般的なX線撮影手法を用い、位相コントラスト法を用いて撮影されたX線画像を、例えばリウマチ等、軟骨や軟部組織における病変の診断等に用いることで、患者に強いる負担の低減や医療費削減が期待されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2008−023312号公報
【特許文献2】特開2007−268033号公報
【特許文献3】特開2008−18060号公報
【特許文献4】特開昭58−16216号公報
【特許文献5】国際公開第2004/058070号パンフレット
【特許文献6】特開2007−203063号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
例えばリウマチ診断のために画像撮影を行う場合には、リウマチ未発症のいわば予備軍に対して画像診断を行いリウマチの発症予防、早期発見等を目的とする場合と、既にリウマチを発症している患者について発症後の進行状況(投薬の効き具合等)の確認を目的とする場合とがある。
【0007】
しかしながら、既にリウマチを発症している場合のように、関節部分等に病変を生じている場合には、撮影すべき関心領域である関節部分等の病変箇所には痛みがあるため、健常者のように被写体台に関節部分等を沿わせて真っ直ぐに伸ばすことは難しい場合がある。
また、仮に真っ直ぐに伸ばすことができたとしても、かなりの苦痛を伴い、このような状態で被写体台に固定されることは患者にとって大きな負担であった。
また、病変が発症している関節部分等と被写体台との間に空間があると、元々、病変発症により痛みを伴っているために、手指の震えや体動等により被写体が動いてしまうことが想定される。
走査が不要であり1回の撮影でよいフーリエ変換方式においても、所定の線量を照射するまでの照射時間(撮影時間)が長くなるため、この間に被写体が動くと、生成される画像はぶれてしまう。また、個々の撮影時間自体は短いものの、複数回の走査撮影を行うタルボ(タルボロー)方式においても、各走査の間に被写体が動くと、やはり、生成される画像はぶれてしまう。
【0008】
また、関節部分を撮影する際は、撮影したい関心領域(ROI)であるMCP関節やPIP関節等の頂部を放射線照射軸と略一致させるように技師が患者をポジショニングする必要がある。しかし、痛みを伴う体勢で固定されていると、技師が曝射スイッチ操作のために患者から離れた際に、関心領域が動いてしまうおそれがある。関心領域が移動してしまうと、再撮影が必要となるが、再撮影となった場合には、患者に無駄な被曝をさせることとなってしまう。
【0009】
さらに、撮影の目的や対象部位等によっては、平坦に伸ばした状態よりも軽く関節等を曲げた状態で撮影した方が病変箇所の観察に優れた画像を得ることができる場合もある。しかし、撮影中関節等を曲げた状態を保つことは難しく、位置ずれやぶれを生じやすいという問題もある。
【0010】
本発明は以上のような事情に鑑みてなされたものであり、患者に負担をかけることなく撮影対象をしっかりと固定でき、位置ずれやぶれ等を生じにくい被写体台を備えた関節撮影装置を提供することを目的とするものである。
【課題を解決するための手段】
【0011】
前記課題を解決するために、請求項1に記載の発明によれば、
被写体である人の手指を撮影位置に保持する被写体台と、
前記被写体台の上方に配置され、被写体の撮影対象部分である手指の関節部分に放射線を照射する放射線発生手段、及び前記被写体台の下方に配置され、前記関節部分を透過した放射線を検出する検出手段を有する撮影部と、
を備えている関節撮影装置であって、
前記被写体台は、
前記撮影対象部分である関節部分を前記放射線発生手段からの放射線照射方向に対して所定の位置に固定する撮影対象固定ユニットと、
前記撮影対象固定ユニットを着脱可能に構成され、前記被写体の手首部分を固定するベースユニットと、
を備えている関節撮影装置が提供される。
【0012】
請求項2に記載の発明によれば、
互いに異なる所定の位置に手指の関節部分を固定する複数の前記撮影対象固定ユニットを備え、
当該複数の撮影対象固定ユニットのそれぞれが、前記ベースユニットに着脱可能に構成されている請求項1に記載の関節撮影装置が提供される。
【0013】
請求項3に記載の発明によれば、
前記放射線発生手段からの放射線照射方向と直交する方向に延在して複数のスリットが所定間隔で設けられている第1格子及び第2格子を備えている縞走査型撮影装置である請求項1又は請求項2に記載の関節撮影装置が提供される。
【0014】
請求項4に記載の発明によれば、
前記放射線発生手段近傍に配置されたマルチ格子を備え、
当該マルチ格子を前記第1格子及び前記第2格子に対して相対移動させるタルボ・ロー干渉計である請求項3に記載の関節撮影装置が提供される。
【発明の効果】
【0015】
本発明の撮影装置によれば、人の手指等の被写体の関節部分を撮影する関節撮影装置において、被写体を撮影位置に保持する被写体台に、撮影対象部分である関節部分を放射線発生手段からの放射線照射方向に対して所定の位置に固定する撮影対象固定ユニットとこの撮影対象固定ユニットを着脱可能に構成され、被写体の手首部分を固定するベースユニットとを備えている。これにより、患者が既にリウマチを発症している場合のように、関節部分等に病変を生じて痛みがある場合等、関節部分等を真っ直ぐに伸ばして被写体台の上に載置ことが難しい場合でも、患者に負担をかけることなく撮影対象をしっかりと固定して撮影中の撮影対象のぶれや揺れ等を抑えることができる。
また、ベースユニットにより手首を固定した上で、撮影対象固定ユニットにより撮影対象部分である関節部分を撮影に適した所定の位置に固定することができるため、患者が関節部分等を真っ直ぐに伸ばすことができない場合でも、被写体が浮き上がらないようにすることができ、安定して固定することができる。このため、手指の震えや体動等により被写体が動いてしまうことを防止でき、画像のぶれや再撮影が生じるおそれ等を防ぐことができる。
また、互いに異なる所定の位置に手指の関節部分を固定する複数の撮影対象固定ユニットを備えているため、撮影の目的や撮影対象部位、患者の手指の関節の状態等に応じて、ユーザである技師が最も適したものを選択することができる。このため、1台の装置で様々な状況での撮影に対応することができるとともに、患者の負担をより少なくしながら、診断に適した画像を得ることができる。
また、複数のスリットを有するマルチ格子、及び/又は、第1の位相格子及び第2の位相格子を備えた場合には、縞走査方式により関節部分の複数の撮影を行うが、この複数の撮影の間に撮影対象部分が動かないように被写体を安定して撮影位置に保持できるため、X線吸収差が小さく、吸収コントラスト法によっては画像として現れにくい関節軟骨、関節周辺の軟部組織であっても体動に伴うアーチファクト等の無い診断に適した画像を得ることができる。
【図面の簡単な説明】
【0016】
【図1】本実施の形態に係る関節撮影装置を含むX線画像システムの模式的な側面図である。
【図2】図1に示す関節撮影装置の上面図である。
【図3】図1に示す関節撮影装置の具体的構成を示す斜視図である。
【図4】図3に示す関節撮影装置の各構成部を分離した状態を示す斜視図である。
【図5】図3に示す関節撮影装置の第1のカバーユニットを分解した状態を示す斜視図である。
【図6】図3に示す関節撮影装置の第2のカバーユニットを分解した状態を示す斜視図である。
【図7】図4に示す関節撮影装置にX線検出器保持部取り付ける様子を示す斜視図である。
【図8】図4に示す関節撮影装置にX線検出器保持部取り付けた状態を示す斜視図である。
【図9】被写体台の被写体台上面板を拡大した要部斜視図である。
【図10】図9に示す被写体台の被写体台上面板の中央部近傍の要部を示す拡大断面図である。
【図11】ベースユニット及び第1の撮影対象固定ユニットと、ベースユニットに第1の撮影対象固定ユニットを装着した被写体保持部材とを示す斜視図である。
【図12】被写体台の被写体台上面板の上に第1の撮影対象固定ユニットが装着された被写体保持部材を載置した状態を示す斜視図である。
【図13】ベースユニット及び第2の撮影対象固定ユニットと、ベースユニットに第2の撮影対象固定ユニットを装着した被写体保持部材とを示す斜視図である。
【図14】第2の撮影対象固定ユニットが装着された被写体保持部材に指を固定した状態を示す斜視図であり、(a)は人差し指、(b)は中指、(c)は薬指、(d)は小指を固定した状態を示す斜視図である。
【図15】ベースユニット及び第3の撮影対象固定ユニットと、ベースユニットに第3の撮影対象固定ユニットを装着した被写体保持部材とを示す斜視図である。
【図16】第3の撮影対象固定ユニットが装着された被写体保持部材に指を固定した状態を示す斜視図である。
【図17】ベースユニット及び第4の撮影対象固定ユニットと、ベースユニットに第4の撮影対象固定ユニットを装着した被写体保持部材とを示す斜視図である。
【図18】第4の撮影対象固定ユニットが装着された被写体保持部材に指を固定した状態を示す斜視図である。
【図19】ベースユニット及び第5の撮影対象固定ユニットと、ベースユニットに第5の撮影対象固定ユニットを装着した被写体保持部材とを示す斜視図である。
【図20】第5の撮影対象固定ユニットが装着された被写体保持部材に指を固定した状態を示す斜視図である。
【図21】図1に示す関節撮影装置の主要な構成を模式的に示す図である。
【図22】マルチ格子ユニットの斜視図である。
【図23】マルチ格子ユニットがX線源の下方に配置された状態を示す斜視図である。
【図24】励磁電流とマルチ格子の変位量との関係を示すグラフ図である。
【図25】マルチ格子の平面図である。
【図26】第1格子ユニット及び第2格子ユニットを基台部に取り付けた状態を示す斜視図である。
【図27】第1格子ユニットの斜視図である。
【図28】第1格子ユニットの斜視図である。
【図29】第1格子ユニットの斜視図である。
【図30】本体部の機能的構成を示すブロック図である。
【図31】タルボ干渉計の原理を説明する図である。
【図32】関節撮影装置によるX線撮影時の処理を示すフローチャートである。
【図33】コントローラによる処理を示すフローチャートである。
【図34】5ステップの撮影により得られるモアレ画像を示す図である。
【図35】各ステップのモアレ画像の注目画素のX線相対強度を示すグラフである。
【図36】図3に示す関節撮影装置の被写体台の被写体台上面板の上に被写体支持板を載置した状態を示す斜視図である。
【図37】図36に示す関節撮影装置の被写体支持板に補助台を連結した状態を示す斜視図である。
【図38】図37に示す被写体支持板及び補助台を用いて被写体の肩の関節部分の撮影を行う様子を示す斜視図である。
【図39】図37に示す被写体支持板及び補助台を用いて被写体の足首の関節部分の撮影を行う様子を示す斜視図である。
【図40】図37に示す被写体支持板及び補助台を用いて被写体の膝の関節部分の撮影を行う様子を示す斜視図である。
【図41】図37に示す被写体支持板及び補助台を用いてリクライニングした状態で被写体の膝の関節部分の撮影を行う様子を示す斜視図である。
【図42】図36に示す被写体支持板及びストレッチャーを用いて被写体の足首の関節部分の撮影を行う様子を示す斜視図である。
【図43】被写体台に屈折率調整タンクを備える構成を模式的に示す説明図である。
【発明を実施するための形態】
【0017】
以下、図面を参照しつつ、本発明に係る関節撮影装置の一実施形態について説明する。
本実施形態において、関節撮影装置は、被写体である人の手指等を撮影位置に保持する被写体台13と、この被写体台13の上方に配置され、被写体の撮影対象部分である手指等の関節部分に放射線を照射する放射線発生手段としてのX線源11、及び被写体台13の下方に配置され、関節部分を透過した放射線を検出する検出手段としてのX線検出器16を有する撮影部と、を備えている。
【0018】
図1は本実施形態に係る関節撮影装置を備えるX線画像システムを模式的に示したものであり、図2は、図1に示す関節撮影装置1を上方から見た平面図である。
X線画像システムは、関節撮影装置1とコントローラ5を備えている。関節撮影装置1はタルボ・ロー干渉計によるX線撮影を行い、コントローラ5は当該X線撮影により得られたモアレ画像を用いて被写体の再構成画像を作成する。
【0019】
関節撮影装置1は、図1に示すように、X線源11、マルチ格子12、光照射野確認ユニット6、被写体台13、第1格子14、第2格子15、X線検出器16、支柱17、本体部18、基台部19を備えている。
本実施形態における関節撮影装置1は縦型であり、X線源11、マルチ格子12、被写体台13、第1格子14、第2格子15、X線検出器16は、この順序に重力方向であるz方向に沿って配置されている(図21参照)。
なお、図1中、X線源11の焦点とマルチ格子12間の距離をd1(mm)、X線源11の焦点とX線検出器16間の距離をd2(mm)、マルチ格子12と第1格子14間の距離をd3(mm)、第1格子14と第2格子15間の距離をd4(mm)で表す。
【0020】
距離d1は好ましくは3〜500(mm)であり、さらに好ましくは4〜300(mm)である。
距離d2は、一般的に放射線科の撮影室の高さは3(m)程度又はそれ以下であることから、少なくとも3000(mm)以下であることが好ましい。なかでも、距離d2は400〜2500(mm)が好ましく、さらに好ましくは500〜2000(mm)である。
X線源11の焦点と第1格子14間の距離(d1+d3)は、好ましくは300〜5000(mm)であり、さらに好ましくは400〜1800(mm)である。
X線源11の焦点と第2格子15間の距離(d1+d3+d4)は、好ましくは400〜5000(mm)であり、さらに好ましくは500〜2000(mm)である。
それぞれの距離は、X線源11から照射されるX線の波長から、第2格子15上に第1格子14による格子像(自己像)が重なる最適な距離を算出し、設定すればよい。
【0021】
図3は、図1及び図2に示す関節撮影装置1の構成を具体的に示した斜視図であり、図4は、関節撮影装置1の各構成部を分離した状態を示す斜視図である。
図3及び図4に示すように、本実施形態における関節撮影装置1は、X線源11を支持する支柱17と、マルチ格子12を含むマルチ格子ユニット120、第1格子14を含む第1格子ユニット140、第2格子15を含む第2格子ユニット150及びX線検出器16が取り付けられている基台部19と、被写体台13(図4においては、被写体台13を構成する被写体台基台部130のみを示している。)とに大きく分離することができる。なお、本実施形態では、X線源11を支持する支柱17と、X線検出器16が取り付けられている基台部19とにより撮影部が構成されている。この撮影部と被写体台13とを分離できることにより、撮影前或いは撮影中に、患者から被写体台13に加えられた衝撃等が撮影部に影響を及ぼすことを防止することができる。
【0022】
本実施形態において、基台部19には、マルチ格子ユニット120を覆うように設けられた第1のカバーユニット21、及び第1格子ユニット140、第2格子ユニット150を覆うように設けられた第2のカバーユニット22が取り付けられている。
マルチ格子12、第1格子14及び第2格子15は、後述するように非常に高い精度での位置調整が必要な部材であり、被写体の撮影及びそのキャリブレーションを行うための被写体なしでの撮影等、複数回に亘って一連の撮影を行う場合、その間、同じ条件が保たれていることが望ましい。
しかし、マルチ格子12、第1格子14及び第2格子15の周囲に何らカバー等を設けないで雰囲気に曝した状態では、設置された撮影室内における雰囲気温度の変化(例えばエアコンによる気流変化で天井付近と床面付近とで生じる温度差)や衝撃、振動等の影響を受けやすく、これにより、複数回に亘る一連の撮影を行う間に、マルチ格子12、第1格子14及び第2格子15の位置や向きが、適正状態から僅かずつずれることがありうる。第1のカバーユニット21及び第2のカバーユニット22は、マルチ格子12、第1格子14及び第2格子15が外部からの影響を受けるのを避けて、例えば、エアコンの冷気流、或いは、暖気流等に直接的に曝され、部分的に熱膨張変動する等を抑制し、一連の撮影の間、撮影条件を維持するとともに、精密部材であるマルチ格子12、第1格子14及び第2格子15が外部からの衝撃等を受けることを防止するためのものである。
【0023】
図5は、マルチ格子ユニット120及び光照射野確認ユニット6の周囲に設けられている第1のカバーユニット21を分解した状態を示す斜視図である。
図5に示すように、第1のカバーユニット21は、マルチ格子ユニット120及び光照射野確認ユニット6を前面側から覆うように配置される前面カバー部材211と、この前面カバー部材211よりも関節撮影装置1の奥側(すなわち、支柱17側)に配置され、マルチ格子ユニット120の上方を覆う上部カバー部材212と、マルチ格子ユニット120及び光照射野確認ユニット6の下方であって上部カバー部材212に対応する位置に配置される下部カバー部材213とを備えている。第1のカバーユニット21を構成する前面カバー部材211、上部カバー部材212、下部カバー部材213は、例えば金属板をプレス加工等することにより形成される。
前面カバー部材211及び上部カバー部材212の上面であって、X線源11に対向する部分には切り欠き部211a、212aが形成されている。また、前面カバー部材211の下面であって、X線源11のX線照射口に対向する部分には開口部211bが設けられている。これにより、第1のカバーユニット21を取り付けた状態でも、X線源11からのX線照射が第1のカバーユニット21によって妨げられないようになっている。
また、前面カバー部材211において支柱17に対向する面には、後述する光照射野確認ユニット6の移動用レバー67に対応する位置に、レバー用開口部211cが形成されている。レバー用開口部211cは、移動用レバー67の移動範囲とほぼ同じ長さとなるようにx方向に延在する長孔であり、移動用レバー67の先端部はこのレバー用開口部211cから前面カバー部材211の外に突出するようになっている。これにより、ユーザは第1のカバーユニット21を取り付けた状態でも光照射野確認ユニット6の移動用レバー67を操作することができる。なお、レバー用開口部211cの周囲や近傍等に移動用レバー67の位置によって光照射野確認部本体65が光照射野確認位置又は退避位置(後述)のいずれにあるかを示す目盛や指標等を設けてもよい。
第1のカバーユニット21を取り付ける際は、上部カバー部材212をマルチ格子ユニット120の上方を覆うように基台部19にねじ止め固定し、下部カバー部材213をマルチ格子ユニット120の下方から上部カバー部材212の下端部に当接するように位置を合わせて基台部19にねじ止め固定する。さらに前面カバー部材211をマルチ格子ユニット120の前面側から上部カバー部材212及び下部カバー部材213と嵌め合わせて、それぞれねじ止め固定する。
なお、第1のカバーユニット21は、マルチ格子ユニット120に対する外部からの影響を遮断できるものであればよく、その材料や形状、構成、固定手法等はここに例示したものに限定されない。また、当該第1のカバーユニット21の少なくとも内面側には断熱部材が設けられていることが好ましい。
【0024】
図6は、第1格子ユニット140、第2格子ユニット150の周囲に設けられている第2のカバーユニット22を分解した状態を示す斜視図である。
図6に示すように、第2のカバーユニット22は、第1格子ユニット140、第2格子ユニット150を前面側から覆うように配置される前面カバー部材221と、第1格子ユニット140の上方を覆う上部カバー部材222と、第1格子ユニット140、第2格子ユニット150の両側部に配置される側面カバー部材223とを備えている。第2のカバーユニットを構成する前面カバー部材221、上部カバー部材222、側面カバー部材223は、例えば金属板をプレス加工等することにより形成される。
上部カバー部材222は、中央部が切り欠かれた上面視コ字状の部材であり、被写体台13に載置される被写体、第1格子14及び第2格子15の上を上部カバー部材222の上面が覆わないようになっている。
第2のカバーユニット22を取り付ける際は、側面カバー部材223を第1格子ユニット140及び第2格子ユニット150の両側部を覆うように基台部19をにそれぞれ固定し、前面カバー部材221を第1格子ユニット140及び第2格子ユニット150を前面側から覆うように位置を合わせて側面カバー部材223の前面側端部にねじ止め固定する。さらに、上方から上部カバー部材222を被せて、基台部19、側面カバー部材223及び前面カバー部材221とそれぞれねじ止め固定する。
なお、第2のカバーユニット22は、第1格子ユニット140、第2格子ユニット150に対する外部からの影響を遮断できるものであればよく、その材料や形状、構成、固定手法等はここに例示したものに限定されない。また、当該第2のカバーユニット22の少なくとも内面側には断熱部材が設けられていることが好ましい。
【0025】
また、第2のカバーユニット22の周囲は、被写体である手等を被写体台13に載置している患者の足等がぶつかる等により外部からの衝撃を受けやすい。このため、第2のカバーユニット22の外側には、例えば、図3及び図5に示すようなガード部材41が設けられている。ガード部材41は、例えば金属板等で形成され、図5に示すように、第2のカバーユニットの周囲にねじ止め等により着脱可能に固定される。なお、ガード部材41の形状、第2のカバーユニット等への固定方法等は、ここに例示したものに限定されない。さらに、ガード部材41の内側に衝撃吸収用の弾性部材等を設けてもよい。
このようなガード部材41を設けることにより、撮影時に患者の足等が装置側に当たっても、その衝撃が第1格子14や第2格子15等の精密部材に影響を与えることを防止することができ、精度の高い画像撮影を行うことができる。
【0026】
被写体台13は、撮影時に被写体となる患者の手指等を載置するものである。被写体台13の大きさは特に限定されないが、図1に示すように、撮影時に被写体となる患者の手指等をX線照射範囲内(撮影可能領域内)に置いた際に、患者の肘部分まで載置できる程度の長さ寸法を有し、腕レスト部を構成することが好ましい。手指から肘部分までを被写体台13に載置することにより、撮影対象である手指の位置及び姿勢を安定させることができ、撮影時の手ぶれ等を防ぐことができる。
【0027】
図3及び図4に示すように、本実施形態では、被写体台13は、キャスタ131を備える脚部132を有する被写体台基台部130を備え、支柱17や基台部19から独立している。脚部132は、支柱17と基台部19との間に配置されるようになっており、基台部19側の脚部132には、キャスタ131をロックするロック機構133が設けられている。
なお、被写体台13の構成はここに例示したものに限定されない。例えば被写体台基台部130の全ての脚部132にロック機構133を設けてもよいし、ロック機構133を設けず、支柱17又は基台部19の一端に被写体台13が固定されるようにしてもよい。なお、被写体台13は、支柱17又は基台部19に接触した際に衝撃を吸収することのできる衝撃吸収部材(図示せず)を備えていることが好ましい。
【0028】
また、本実施形態において、被写体台基台部130の手前側の脚部132の間には、X線検出器保持部25が着脱可能に取り付けられる部材係止用支柱132aがほぼ水平に固定されている。
X線検出器保持部25は、X線検出器16のゲイン等のキャリブレーション時にX線検出器16を保持するものであり、図7及び図8に示すように、X線検出器保持部25の一端側には鉤状に形成された係止用フック251が設けられている。X線検出器保持部25は、X線検出器16のキャリブレーション時において、X線検出器16を上面に保持したまま、この係止用フック251を被写体台13の部材係止用支柱132aに係止することにより被写体台13に固定される。
【0029】
本実施形態では、後述するように、X線源11のX線照射方向を変えることができるようになっており、X線検出器16のキャリブレーション時には、X線の光軸がマルチ格子12、第1格子14及び第2格子15の上から外れる状態(キャリブレーション状態 図8参照)まで、X線源11の向きが調整される。X線検出器保持部25は、被写体台13に取り付けられた状態において、X線源11のX線照射方向がキャリブレーション状態に調整された際のX線源11の光軸の延長線上に配置されるようになっており、X線検出器保持部25の上にX線検出器16を保持してX線源11からX線を照射し、撮影を行うことにより、マルチ格子12、第1格子14及び第2格子15の画像が映りこんでいないキャリブレーション用の画像を取得することができる。
【0030】
被写体台13の上面であって、第2のカバーユニット22の上部カバー部材222の上には、樹脂あるいは金属等により形成され、被写体を保持する被写体台上面板3が図示しない固定用ピンによりピン止め固定されている。上部カバー部材222には被写体台上面板3の固定用ピンに対応する位置に貫通孔が形成されており、被写体台上面板3は、第2のカバーユニット22を基台部19に取り付けた後に上部カバー部材222の上から被写体台基台部130に固定される。
被写体台上面板3は、例えば固定用ピンの高さ方向の固定位置を複数段階に調整することにより、被写体を保持する高さを調製することができるようになっていることが好ましい。これにより、被写体台上面板3の固定用ピンの固定位置を調整することで被写体台13の上に保持される被写体とX線源11との距離を撮影に適した所定の距離に保つことができる。
【0031】
被写体台上面板3のほぼ中央部には円形の切り欠き部301が設けられており、この切り欠き部301には円形の回転板302が回転可能に装着されている。回転板302を回転させることにより、この回転板302の上に載置される被写体保持部材30(図11等参照)の向きや位置等を簡易に変更・修正することができる。これにより容易にポジショニングの修正等を行うことができる。
また、本実施形態における関節撮影装置1のように縞走査方式により関節部分の撮影を行う場合には、干渉縞が現れたモアレ画像を得るために、マルチ格子12、第1格子(第1の位相格子)14及び第2格子(第2の位相格子)15のスリットの向き・角度と被写体の向き・角度とを適切に調整する必要がある。この点、マルチ格子12、第1格子14及び第2格子15は非常に精密に構成されたものであり、これを移動、調整すると精度を保つことが難しい。この点、被写体台上面板3の被写体を載置する部分を回転可能に構成することにより、被写体側を動かすことで適宜調整を行うことができる。なお、回転板302を回転させすぎるとかえってモアレ画像を得ることができなくなる。このため、回転板302は、例えば所定の初期位置から45度等、一定の範囲内で回転可能に構成してもよい。
被写体台上面板3の上であって回転板302の周縁部近傍には、回転板302を固定する回転板固定用ピン303が設けられており、回転板302を固定可能となっている。
【0032】
この回転板302のほぼ中央部であって第1格子14及び第2格子15に対応する位置には、ほぼ円形の切り欠き部304が設けられており、X線源11からのX線照射を妨げないようになっている。
図9及び図10に示すように、この切り欠き部304には、透明なアクリルやガラス等の透明材料で形成されたほぼ円形の透明板部材305が装着されている。
図10に示すように、この透明板部材305は、その上面が回転板302の上面よりも僅かに低い位置となるように配置されている(本実施形態では図10に示す高低差Gだけ透明板部材305の上面が回転板302の上面よりも低くなっている。)。これにより、被写体台上面板3の回転板302の上面に後述する被写体保持部材30等が載置、固定された場合に、透明板部材305の表面に被写体保持部材30等が接触するのを避けることができ、透明板部材305の表面が傷等の損傷を受けることを防いで耐久性を向上させることができる。
【0033】
図9に示すように、被写体台上面板3の回転板302の上であって透明板部材305を挟むほぼ対称位置には、互いにほぼ平行に形成された長孔306が設けられており、この長孔306には、それぞれ図11等に示す被写体保持部材30を固定するための保持部材固定用ピン307が設けられている。
【0034】
被写体台上面板3の上には、被写体保持部材30が着脱自在に載置されるようになっている。本実施形態では、同一箇所について複数回撮影が行われるが、被写体保持部材30は、その一連の撮影の間、被写体である手指が動いたりずれたりしないように手指の位置を保持・固定するためのものである。
図11及び図13から図20に示すように、本実施形態において、被写体保持部材30は、ベースユニット31と、このベースユニット31に対して着脱自在に構成され被写体である人の手指を支持するための撮影対象固定ユニット33(第1の撮影対象固定ユニット33a〜第5の撮影対象固定ユニット33e)とで構成されている。なお、以下の実施形態においては、左手用の被写体保持部材30のみを図示しているが、右手の手指を撮影する際には、同様の構成の右手用の被写体保持部材30を用いる。
ベースユニット31及び撮影対象固定ユニット33は、例えばポリアセタール樹脂(POM:polyacetal, polyoxymethylene)等で形成されている。なお、ベースユニット31及び撮影対象固定ユニット33を形成する材料はポリアセタール樹脂に限定されず、各種樹脂等を用いることができる。また、ベースユニット31及び撮影対象固定ユニット33のうち、被写体を被写体保持部材30に保持した際に撮影対象である手指の関節部分と重なり合わない部分は金属等で形成されていてもよい。また、手指が直接接触する部分等にはシリコン樹脂等の弾性を有する材料で形成された緩衝部材が配置されることが好ましい。また、ベースユニット31及び撮影対象固定ユニット33は、撮影する患者が代わるごとに消毒を行うことが衛生上好ましく、ベースユニット31及び撮影対象固定ユニット33を形成する材料は、消毒に用いられるアルコール等に対して耐性を有するものであることが好ましい。
【0035】
ベースユニット31は、ほぼ中央に撮影対象固定ユニット33(第1の撮影対象固定ユニット33a〜第5の撮影対象固定ユニット33e)を装着する撮影対象固定ユニット装着部311を備え、撮影対象固定ユニット33を着脱することが可能に構成された枠状の部材である。
ベースユニット31において被写体台上面板3の回転板302に設けられている2つの保持部材固定用ピン307に対応する位置には、それぞれ長孔306の延在方向にほぼ直交する向きに延在して形成された長孔312が設けられている。
図12に示すように、保持部材固定用ピン307は、ベースユニット31の長孔312と回転板302の長孔306とを貫通して、被写体保持部材30を被写体台上面板3の回転板302に係止するようになっており、被写体保持部材30は、長孔306及び長孔312の位置を調整することによって被写体台上面板3上の向きや位置を微調整された上で保持部材固定用ピン307によって固定されるようになっている。
撮影対象固定ユニット装着部311の一端側近傍であって、撮影対象固定ユニット33に支持される手の手首側となる位置には、被写体の手首部分を固定するための手首固定用ベルト313が設けられている。
【0036】
また、撮影対象固定ユニット装着部311の他端側近傍であって、撮影対象固定ユニット33に支持される手の指先側となる位置には、撮影対象固定ユニット33を撮影対象固定ユニット装着部311に固定するためのベース側固定部314となっている。ベース側固定部314には、撮影対象固定ユニット33を撮影対象固定ユニット装着部311に装着した後、固定用ピン333を挿通させる孔部316が形成されている。
また、ベースユニット31におけるベース側固定部314近傍であって後述する撮影対象固定ユニット33側の固定部(固定ユニット側固定部331)の側面に設けられている孔部334に対応する位置には、ベースユニット31の側端面から撮影対象固定ユニット装着部311内側までベースユニット31における水平方向(被写体保持部材30を被写体台上面板3に上に載置した際の水平方向)に貫通する貫通孔317が形成されている。この貫通孔317には微調整用ねじ318がベースユニット31の側端面から撮影対象固定ユニット装着部311内側に向かって挿通されている。
さらに、ベースユニット31には、ベースユニット31の表面から貫通孔317に向かって垂直方向に孔部319が形成されている。孔部319には微調整用ねじ318を固定するための調整固定用ねじ320がベースユニット31の表面から貫通孔317に向かって挿通されている。
なお、ベースユニット31の形状、構成、ベースユニット31を被写体台上面板3に固定するための構成等はここに例示したものに限定されず、適宜変更可能である。
【0037】
撮影対象固定ユニット33は、撮影対象部分である手指の関節部分を放射線発生手段であるX線源11からのX線(放射線)照射方向に対して所定の位置に固定するものである。
本実施形態においては、ベースユニット31に装着可能な撮影対象固定ユニット33として、図11及び図13から図20に示すように、5種類の撮影対象固定ユニット33a〜33eが用意されている。なお、以下において単に撮影対象固定ユニット33としたときはこれら全て(撮影対象固定ユニット33a〜33e)を含むものとする。
撮影においては、撮影したい部位や患者の手指の関節の変形の状況等に応じて撮影に適した撮影対象固定ユニット33を選択し、ベースユニット31に装着する。なお、ベースユニット31に装着可能な撮影対象固定ユニット33は、ここに例示したものに限定されない。さらに多くの種類が用意されていてもよいし、ここに挙げたもののうち一部のみを備えるものであってもよい。
【0038】
第1の撮影対象固定ユニット33aは、図11に示すように、ベースユニット31に固定するための固定ユニット側固定部331と、4つの指間保持部材332とを備えている。
固定ユニット側固定部331は、ベースユニット31の孔部316に対応する位置に固定用ピン333が設けられており、この固定用ピン333を固定ユニット側固定部331からベースユニット31のベース側固定部314の孔部316まで挿通させて締めることにより第1の撮影対象固定ユニット33aをベースユニット31に仮固定することができる。
固定ユニット側固定部331の側面であってベースユニット31の貫通孔317に対応する位置には、貫通孔317に挿通された微調整用ねじ318の先端部が挿入される孔部334が設けられている。
ベースユニット31の貫通孔317に微調整用ねじ318を挿通し、その先端部を孔部334に挿入して適宜奥側に押し込むことにより、第1の撮影対象固定ユニット33aの幅方向(撮影対象固定ユニット33に固定される手指の幅方向)の位置を微調整することができる。幅方向の位置を調整後、調整固定用ねじ320によってベースユニット31の表面から微調整用ねじ318を固定することにより、第1の撮影対象固定ユニット33aをベースユニット31に固定することができる。
【0039】
指間保持部材332は、一端が固定ユニット側固定部331に固定されており、被写体保持部材30に被写体の手指を固定した際に、各指間保持部材332が被写体の手指の5指の間にそれぞれ位置するように並んで配置されている。指間保持部材332は、自由端側から固定ユニット側固定部331に固定されている固定端側に向かって徐々に幅が広くなるテーパ状に形成されており、被写体の手指の先端が十分に開いた状態で固定できるようになっている。
図12は、ベースユニット31に固定された第1の撮影対象固定ユニット33aを被写体台上面板3の上に固定し、この第1の撮影対象固定ユニット33aにユーザが手指を固定した状態を示した図である。例えば、指の第2関節(PIP関節)部分等を撮影したい場合に、図12に示すように4つの指間保持部材332がそれぞれ手指の5指の間に位置するように手指を第1の撮影対象固定ユニット33aに載置することにより、5指をそれぞれ間隔を開けた状態で支持することができる。
なお、第1の撮影対象固定ユニット33aの形状、構成、第1の撮影対象固定ユニット33aをベースユニット31に固定するための構成等はここに例示したものに限定されず、適宜変更可能である。例えば、指間保持部材332が固定ユニット側固定部331に対して容易に着脱可能に構成されるとともに、形状や大きさの異なる指間保持部材332が複数用意され、患者の手の大きさ等に応じて、適宜適切なものを選択して装着するようにしてもよい。
【0040】
第2の撮影対象固定ユニット33bは、図13及び図14(a)〜(d)に示すように、ベースユニット31に固定するための固定ユニット側固定部331と、撮影対象となる手指以外の指を支持させるための握持部335と、撮影対象となる手指を1本ずつ保持する4つの指保持部材338と、この指保持部材338を支持する支持部材336と、を備えている。
固定ユニット側固定部331の構成は、第1の撮影対象固定ユニット33aと同様であることからその説明を省略する。
握持部335は、被写体保持部材30を被写体台上面板3に固定した際の水平面(被写体台上面板3と水平となる面)に対してほぼ垂直に立設された円筒状の部材である。握持部335は、手で軽く握りやすい程度の大きさ・形状に形成されている。握持部335には、患者が握りやすいように表面に滑り止め用の樹脂を塗布したり布等を貼付したりしてもよい。また、手置き部349の表面に指に沿う溝を形成してもよい。
支持部材336は、握持部335の近傍にほぼ垂直に立設されている板状の部材である。支持部材336には、4つの指保持部材338にそれぞれ対応する4つのレール部337が、被写体保持部材30に手指を固定した際の手指の延在方向に沿って形成されている。
4つの指保持部材338は、撮影対象となる指の指先を載置できるように構成された鞘状の部材であり、支持部材336の4つのレール部337にそれぞれスライド移動可能に係止されている。指保持部材338は、指先を載置する際にレール部337に沿ってスライド移動し、各指の長さに応じた位置で指を固定するようになっている。
【0041】
本実施形態では、人差し指の関節部分を撮影する場合には、図14(a)に示すように人差し指以外の手で握持部335を握って手を安定させ、人差し指を支持部材336に沿って伸ばして一番上に位置する指保持部材338に指先を載置する。また、中指の関節部分を撮影する場合には、図14(b)に示すように中指以外の手で握持部335を握って手を安定させ、中指を支持部材336に沿って伸ばして上から二番目に位置する指保持部材338に指先を載置する。また、薬指の関節部分を撮影する場合には、図14(c)に示すように薬指以外の手で握持部335を握って手を安定させ、薬指を支持部材336に沿って伸ばして上から三番目に位置する指保持部材338に指先を載置する。また、小指の関節部分を撮影する場合には、図14(d)に示すように小指以外の手で握持部335を握って手を安定させ、小指を支持部材336に沿って伸ばして一番下に位置する指保持部材338に指先を載置する。
例えば、指の第2関節(PIP関節)部分等を撮影したい場合には、第2の撮影対象固定ユニット33bをベースユニット31に固定した被写体保持部材30を被写体台上面板3の上に固定し、撮影対象となる手指を1本ずつ第2の撮影対象固定ユニット33bの指保持部材338に載置することにより指を1本ずつ伸ばした状態で支持することができる。
なお、第2の撮影対象固定ユニット33bの形状、構成等はここに例示したものに限定されず、適宜変更可能である。指の第2関節(PIP関節)部分等を撮影する場合、多少指が手の甲の側に反っている状態の方が好ましいため、例えば支持部材336を外側(すなわち握持部335から離れる方向)にカーブした形状とし、指保持部材338をその端部近傍に設けるようにしてもよい。また、握持部335を有することは必須ではなく、指を1本ずつ位置決めすることが可能な仕切り板等を設けて、指を1本ずつ手の甲の側に反った状態で保持できる構成としてもよい。
【0042】
第3の撮影対象固定ユニット33cは、図15及び図16に示すように、ベースユニット31に固定するための固定ユニット側固定部331と、撮影対象となる手指の指先に上方向の傾斜をつけるための段差部340と、親指と親指以外の手指との間の間隙が大きくなるように手指の位置や角度を規制する指位置規制部材341と、を備えている。
固定ユニット側固定部331の構成は、第1の撮影対象固定ユニット33aと同様であることからその説明を省略する。
段差部340は、固定ユニット側固定部331と一体となっており、固定ユニット側固定部331の一端から張り出した張出し部で構成されている。段差部340は、掌部分が載置される被写体台上面板3よりも例えば10mm〜15mm程度高くなっているため、撮影対象となる人差し指から小指までの手指の指先を段差部340の上に乗せることによって、指先を上方向に反らせることができる。なお、段差部340の形状や高さ等はここに例示したものに限定されない。例えば、段差部340を固定ユニット側固定部331よりもさらに高くして指先をより高く反らせることができるようにしてもよい。また、段差部340は、指先側に行くほど高さが高くなるように傾斜をつけてもよい。
指位置規制部材341は、一端が固定ユニット側固定部331に固定されており、被写体保持部材30に被写体の手指を固定した際に、親指と人差し指との間に位置するようになっている。指位置規制部材341は、自由端側から固定ユニット側固定部331に固定されている固定端側に向かって徐々に幅が広くなるテーパ状に形成されており、被写体の親指と親指以外の手指(人差し指から小指)との間が大きく開くように親指以外の手指(人差し指から小指)を親指から離れる方向に規制するようになっている。なお、指位置規制部材341の形状・大きさ等は、特に限定されないが、例えば、親指と親指以外の手指との間がほぼ90度近くまで開く程度に大きく固定端側が開いた形状であることが好ましい。また、ユーザの手の大きさや指の形状、撮影したい部位等に応じて形状や大きさの異なる複数種類の指位置規制部材341を用意しておき、状況に応じて最も適するものを付け替えて使用する構成としてもよい。
このように、本実施形態では、第3の撮影対象固定ユニット33cをベースユニット31に固定した被写体保持部材30を被写体台上面板3の上に固定し、被写体である手指を被写体保持部材30に固定すると、撮影対象となる人差し指から小指までの手指の指先が段差部340によって上側に押し上げられ、さらに指位置規制部材341によって親指から離れる方向に規制される。このため、例えば親指の付け根の関節部分等を撮影する際に、親指とそれ以外の指との間が大きく開いて、親指を横になった状態で固定することができる。
なお、第3の撮影対象固定ユニット33cの形状、構成等はここに例示したものに限定されず、適宜変更可能である。
【0043】
第4の撮影対象固定ユニット33dは、図17及び図18に示すように、ベースユニット31に固定するための固定ユニット側固定部331と、撮影対象となる手指を1本ずつ保持する4つの指保持部材345と、この指保持部材345を手指の延在方向に沿ってガイドするガイド部材343と、を備えている。
固定ユニット側固定部331の構成は、第1の撮影対象固定ユニット33aと同様であることからその説明を省略する。
ガイド部材343は、一端が固定ユニット側固定部331に固定されており、各ガイド部材343にはそれぞれ指保持部材345が手指の延在方向に沿ってスライド移動可能に取り付けられている。
指保持部材345において、指先を載置する部分は指の先端側に行くほど高さが高くなるように上側に傾斜している傾斜面となっている。これにより、手指を指保持部材345に載置すると、指先が傾斜面により押し上げられて上側に反った状態で固定される。
指保持部材345は、指先を載置する際にガイド部材343に沿ってスライド移動し、図18に示すように、各指の長さに応じた位置で指を固定するようになっている。
なお、第4の撮影対象固定ユニット33dの形状、構成等はここに例示したものに限定されない。
【0044】
第5の撮影対象固定ユニット33eは、図19及び図20に示すように、ベースユニット31に固定するための固定ユニット側固定部348と、撮影対象となる手指を載せることができる手置き部349と、を備えている。
固定ユニット側固定部348は、一端が手置き部349に固定され、棒状に形成されている。固定ユニット側固定部348の自由端側の端部には、第5の撮影対象固定ユニット33eをベースユニット31に固定するための固定用ねじ348が設けられている。ベースユニット31において、手首固定用ベルト313の近傍には、図示しない孔部が形成されており、第5の撮影対象固定ユニット33eは、固定用ねじ348によりベースユニット31側のこの孔部にねじ止めされることによりベースユニット31に固定される。
手置き部349は、半球形状の部材であり、図20に示すように、撮影対象である手指を軽く曲げた状態で手置き部349上に載置することで指を固定するようになっている。これにより、リウマチ等の発症により関節部分を伸ばすことができない状態にある場合や、湯部を多少曲げた状態で撮影を行った方が好ましい場合等において、比較的楽な姿勢で患者に負担をかけることなく、指の位置や角度を安定させることができ、撮影中の手指のずれや揺れ等を抑えることができる。
なお、第5の撮影対象固定ユニット33eの形状、構成等はここに例示したものに限定されない。例えば、手置き部349の表面に患者が握りやすいように滑り止め用の樹脂を塗布する等してもよい。また、手置き部349の表面に指に沿う溝を形成してもよい。また、第5の撮影対象固定ユニット33eとして、固定ユニット側固定部348の長さや、手置き部349の大きさ、形状、高さ等が異なるものを複数用意しておき、患者の手の形や大きさ等に合ったものを撮影に用いるようにしてもよい。
【0045】
図21は、本実施形態における関節撮影装置1の要部構成を模式的に示したものである。
本実施形態において関節撮影装置1は、X線源11、マルチ格子12、光照射野確認部本体65、被写体台13の被写体保持部材30、第1格子14、第2格子15、X線検出器16が、この順序に重力方向であるz方向(図1参照)に沿って配置されている。
【0046】
X線源11には、ほぼコ字状に形成された固定用部材111が取付用アーム112を介して取り付けられている。本実施形態において、支柱17は、四角柱形状となっており、固定用部材111は、支柱17を側面から挟み込むようにして支柱17に取り付けられ、固定されている。
取付用アーム112の一部には緩衝部材17a(図1参照)が設けられており、X線源11は、この緩衝部材17aを介して保持されている。緩衝部材17aは、衝撃や振動を吸収できる材料であれば何れの材料を用いてもよいが、例えばエラストマー等が挙げられる。X線源11はX線の照射によって発熱するため、X線源11側の緩衝部材17aは衝撃や振動を吸収できる材料であることに加えて断熱材料であることが好ましい。
【0047】
X線源11はX線管を備え、当該X線管によりX線を発生させて重力方向(z方向)にX線を照射する。X線管としては、例えば医療現場で広く一般に用いられているクーリッジX線管や回転陽極X線管を用いることができる。陽極としては、タングステンやモリブデンを用いることができる。
X線の焦点径は、0.03〜3(mm)が好ましく、さらに好ましくは0.1〜1(mm)である。
【0048】
また、本実施形態では、X線源11は、図5及び図6等に示すように、取付用アーム112の一部がほぼ90度屈曲することにより、平行度及び相対距離を調整されたマルチ格子12、第1格子14、第2格子15のスリットの方向に対してX線源11の取付方向がほぼ90度回転可能に構成されている。
本実施形態において、X線源11のX線管の焦点形状は完全な円形ではなく、僅かに楕円形状となっており、後述するモアレ画像を取得する際の撮影では、X線管の向きを変えることによって適切なモアレ画像を得ることができる場合がある。このため、X線源11をほぼ90度回転させることにより、X線管の焦点形状に由来する不具合を解消することができる。
なお、X線源11を、マルチ格子12、第1格子14及び第2格子15のスリット方向に対する取付方向を変更可能とする構成はここに例示したものに限定されない。例えば、固定用部材111の取付位置を変えることによりX線源11の取付方向を変更可能としてもよい。また、X線源11の取付方向の変更は90度だけでなく、さらに細かく角度設定が可能となるように構成してもよい。
【0049】
さらに、本実施形態では、X線源11は、図8に示すように、取付用アーム112におけるX線源11固定側の端部が回動可能となっており、X線源11から照射されるX線の光軸が支柱17とほぼ平行でX線がマルチ格子12、第1格子14及び第2格子15の上に照射される状態(撮影状態 図7参照)から、X線の光軸がマルチ格子12、第1格子14及び第2格子15の上から外れる状態(キャリブレーション状態 図8参照)まで、X線源11のX線照射方向を変えることができるようになっている。
なお、キャリブレーション時のX線源11のX線照射方向は、X線の光軸がマルチ格子12、第1格子14及び第2格子15の上から外れる状態となる方向であればよく、ここに例示したものに限定されない。キャリブレーション時のX線源11のX線照射方向が他の方向である場合には、X線検出器保持部25がX線源11の光軸の延長線上に配置されるように、その取り付け位置が調整される。
【0050】
また、X線源11の直下であって、後述するマルチ格子12の下方には、照射野絞り113とフィルタ114が設けられている。
照射野絞り113は、X線源11から照射されるX線の照射野を所定の範囲に絞るものである。
フィルタ114は、X線源11から照射される光線の中から不要な波長の光線を分離するものであり、例えばAL付加フィルタ等が適用される。
【0051】
光照射野確認ユニット6は、図3、図5等に示すように、基台部19に取り付けられるほぼL字状の基台取付部61とこの基台取付部61の上に載置される光照射野確認部本体65とを備えている。基台取付部61は、図示しないねじ等により基台部19に固定されている。
基台取付部61における床面に対してほぼ水平に配置されている面には、光照射野確認部本体65をx方向に移動させるためのガイド63が設けられており、光照射野確認部本体65は、このガイド63に沿って手動又は自動で移動可能となっている。
光照射野確認ユニット6は、X線源11から照射されるX線の照射野を予め確認するためにX線の照射野と同じ領域を可視光で照らすものであり、光照射野確認部本体65には、可視光線を照射可能な図示しない光源等が設けられている。
また、光照射野確認部本体65には、関節撮影装置1の奥側(すなわち、支柱17側)から手前側に床面に対してほぼ水平に突出する移動用レバー67が設けられている。移動用レバー67は、光照射野確認部本体65を手動にてガイド63に沿ってx方向に移動させるためのレバーであり、前述のように、関節撮影装置1に第1のカバーユニット21が取り付けられた状態において、その先端部がレバー用開口部211cから前面カバー部材211の外に突出するようになっている。
【0052】
本実施形態において、光照射野確認部本体65は、その光源から照射される光の光軸がX線源11から照射されるX線の光軸と一致して光照射野の確認を行うことができる光照射野確認位置と、X線源11から照射されるX線を妨げない退避位置とを取り得るようになっている。撮影を行う際等、通常の使用時には、光照射野確認部本体65は退避位置(図21において実線で示す位置)に位置し、撮影の妨げにならないようになっている。そして、光照射野の確認を行う際には、ユーザは適宜移動用レバー67を操作することにより、光照射野確認部本体65の光源から照射される光の光軸がX線源11から照射されるX線の光軸と一致する光照射野確認位置(図21において破線で示す位置)まで光照射野確認部本体65の位置を移動させる。なお、光照射野確認部本体65は、モータ等により自動でx方向に移動するように構成してもよい。
なお、本実施形態では、光照射野確認部本体65と第1格子14及び第2格子15との光を遮るものが存在しないため、光照射野の確認を正確に行うことができる。
【0053】
マルチ格子ユニット120、第1格子ユニット140、第2格子ユニット150及びX線検出器16は、同一の基台部19の上に保持され、z方向における位置関係が固定されている。マルチ格子ユニット120、第1格子ユニット140、第2格子ユニット150は、重力方向(z方向)と直交する方向に延展せしめられており、ねじ等により、それぞれ基台部19に対して着脱自在に取り付けられている。
また、光照射野確認ユニット6は、基台部19の上であってマルチ格子ユニット120の直下近傍に取り付けられている。
また、X線検出器16は、基台部19に設けられている検出器支持台191の上に、緩衝部材192を介して載置されている。
なお、基台部19は支柱17に対してz方向に移動可能に構成されていてもよい。
【0054】
図22は、マルチ格子ユニット120の斜視図である。
図22に示すように、マルチ格子ユニット120は、基台部19に取り付けられるほぼL字状の基台取付部121とこの基台取付部121の上に載置されるマルチ格子ユニット本体122を備えている。
この基台取付部121における床面に対してほぼ水平に配置されている面には、マルチ格子ユニット本体122をx方向に移動させるためのリニアガイド123が設けられている。
基台取付部121は、基台部19への取り付け位置を調整することにより、マルチ格子12と、第1格子14や第2格子15との間における相対距離を調整可能とするものである。また、マルチ格子ユニット本体122には、相対距離微調整機構部127が設けられている。相対距離微調整機構部127は、その重力方向(上下方向)の長さを変えることでマルチ格子12の重力方向(上下方向)の位置を調整するものである。本実施形態では、基台取付部121と相対距離微調整機構部127とにより、マルチ格子12と、第1格子14や第2格子15との間における相対距離を調整する相対距離調整機構が構成される。
なお、比較的重量物であるマルチ格子ユニットを扱う際の作業性や安全性、及び、位置調整のやり易さの両観点からは、前者と後者の機能を分離する方が好ましく、取付位置は位置決めピン等により仮固定し(調整不可)、ネジ等で基台部19に螺合(固定)する構造とし、固定終了後、作業者が両手を自由に使って、マルチ格子ユニット本体122内に設けた相対距離微調整機構部127により相対距離を微調整する構造とすることが好ましい。
【0055】
マルチ格子ユニット本体122には、マルチ格子12が支持されている他、マルチ格子12を移動させるためのマルチ格子駆動部125として、x方向移動用モータ125a、マルチ格子12をx方向に回転させるためのθx回転用モータ125b、マルチ格子12をy方向に回転させるためのθy回転用モータ125c、マルチ格子12をz方向に回転させるためのθz回転用モータ125dが設けられている。
本実施形態では、マルチ格子12は、図23に示すように、X線源11の下方からX線源11の内部に挿入されており、X線管の焦点位置のすぐ近くに配置されるようになっている。
【0056】
x方向移動用モータ125aは、通電駆動される駆動源であり、例えばパルス信号に正確に同期して動作するステッピングモータ(パルスモータ)等、高精度の動作制御を行うことのできるモータにより構成されている。x方向移動用モータ125aに適用されるステッピングモータとしては、例えば、オリエンタルモーター株式会社製の5相ステッピングモータ(型式:PX533MH-B)等の5相ステッピングモータが望ましく、5相でも高分解能タイプが好ましい。すなわち、一般的には基本ステップ角:0.72°であるが、高分解能タイプでは基本ステップ角:0.36°であり、このようなモータが好適に用いられる。更に、ステップ数を細分化できるマイクロステップによる制御を行うことが好ましい。
本実施形態では、駆動源であるx方向移動用モータ125aが駆動すると、当該駆動源の出力を被駆動部であるマルチ格子12を含むマルチ格子ユニット120の本体まで伝達する伝達系を構成する図示しないボールねじが回転し、マルチ格子12を含むマルチ格子ユニット120の本体がリニアガイド123にガイドされてx方向に移動するようになっている。
駆動源であるx方向移動用モータ125aと伝達系であるボールねじ及びリニアガイドによってマルチ格子ユニット120の移動部が構成されており、この移動部は重力方向(z方向)と直交する方向に移動する移動要素のみにより構成されている。
【0057】
また、本実施形態では、マルチ格子12を移動させる際には、x方向移動用モータ125aの出力を最大とするが、X線照射時には、マルチ格子駆動部125は、x方向移動用モータ125aへの通電電流が、当該モータの出力を最大としたときにマルチ格子12に生じる変位量の50%以下となるような電流値となるようにx方向移動用モータ125aへの通電電流値を調整するようになっている。
【0058】
マルチ格子12を移動させながら複数回の撮影を行う場合、マルチ格子12の位置を高精度に維持するために、x方向移動用モータ125aに電流をかけて励磁することによりその自己保持力で位置を固定しておく必要がある。また、マルチ格子12を移動させながら複数回の撮影を行う場合には、現時点でのマルチ格子12の位置を次の移動の際の基点としてマルチ格子12を順次移動させていくが、電源を停止させてしまうと、現時点でのマルチ格子12の位置を次の移動の際にフィードバックさせることができなくなってしまう。このため、マルチ格子12を移動させていないとき(すなわち、X線照射時)でも、所定の複数回の撮影が終了するまでは、x方向移動用モータ125aに電流をかけ続けておく必要がある。
他方で、励磁する際にx方向移動用モータ125aにかける電流の電流値が高いと、x方向移動用モータ125aが発熱するとともに、微振動を生じ、これがボールねじに伝わる等により、マルチ格子12の位置に微細な変位を生じさせてしまう。
【0059】
図24は、横軸に時間(min)をとり、縦軸にマルチ格子12の変位量(μm)と温度変化(℃)をとって、励磁電流値と、温度変化及びマルチ格子12の変位量との関係を示したグラフである。
図24において、マルチ格子12の変位量は、初期状態のマルチ格子12の位置をゼロとしたときに励磁電流値及び温度変化によってどれだけマルチ格子12が移動方向(x方向)に変位するかを測定したものである。また、温度上昇値は、各電流値の励磁電流をかけた際のx方向移動用モータ125aの温度変化を測定したものである。
図24に示すように、励磁電流値を当該モータの出力を最大としたときの90%程度とすると、時間の経過に伴ってx方向移動用モータ125aの温度が上昇するとともに、マルチ格子12の変位量も大きくなっていき、1.4μmを超える変位量となる。これに対して、励磁電流値を当該モータの出力を最大としたときの27%程度とすると、時間が経過してもx方向移動用モータ125aの温度はそれほど上昇せず、マルチ格子12の変位量も0.3μm程度に止まる。また、励磁電流値を当該モータの出力を最大としたときの50%程度とした場合でも、時間経過に伴うx方向移動用モータ125aの温度上昇はそれほど大きくなく、マルチ格子12の変位量も0.45μm程度に止まる。
【0060】
ここで、適切なモアレ画像を得るためには、x方向移動用モータ125aによるマルチ格子12の格子送り精度は、格子送り量の1/10以下である必要がある。例えば、マルチ格子12を5回移動させて5回撮影することによりモアレ画像を得る場合には、格子ピッチの1/5ずつマルチ格子12を移動させる。また、マルチ格子12を3回移動させて3回撮影することによりモアレ画像を得る場合には、格子ピッチの1/3ずつマルチ格子12を移動させることとなる。したがって、例えば、格子ピッチが22.8μmであり、その格子送り量が5.7μmである場合、要求される精度(格子相対位置)は、±0.23μm(P-P:0.46μm)となる。
本実施形態においては、励磁電流値を当該モータの出力を最大としたときの50%程度以下であれば、要求される精度(格子相対位置)を満たしており、x方向移動用モータ125aに電流をかけてもモアレ画像の生成に影響を与えないといえる。
【0061】
なお、x方向移動用モータ125aにかける励磁電流値がどの程度のときにモアレ画像の生成に影響を与えるか、すなわち、「x方向移動用モータ125aへの通電電流が、当該モータの出力を最大としたときにマルチ格子12に生じる変位量の50%以下となるような電流値」がどの程度であるかは、モータの種類によって異なる。このため、X線照射時の励磁電流値は、適用するモータに応じて適宜設定することが好ましい。
【0062】
θx回転用モータ125b、θy回転用モータ125c、θz回転用モータ125dは、例えば駆動源となるアクチュエータ等を内蔵したゴニオステージであり、マルチ格子12、第1格子14及び第2格子15相互間における平行度を調整可能とする煽り調整機構として機能するものである。
【0063】
マルチ格子ユニット120に設けられているマルチ格子12は回折格子であり、図33に示すようにx方向に複数のスリットが所定間隔で設けられている。マルチ格子12はシリコンやガラスといったX線の吸収率が低い材質の基板上に、タングステン、鉛、金といったX線の遮蔽力が大きい、つまりX線の吸収率が高い材質により形成される。例えば、フォトリソグラフィーによりレジスト層がスリット状にマスクされ、UVが照射されてスリットのパターンがレジスト層に転写される。露光によって当該パターンと同じ形状のスリット構造が得られ、電鋳法によりスリット構造間に金属が埋め込まれて、マルチ格子12が形成される。
【0064】
マルチ格子12のスリット周期は1〜60(μm)である。スリット周期は、図25に示すように隣接するスリット間の距離を1周期とする。スリットの幅(x方向の長さ)はスリット周期の1〜60(%)の長さであり、さらに好ましくは10〜40(%)である。スリットの高さ(z方向の長さ)は1〜500(μm)であり、好ましくは1〜150(μm)である。
マルチ格子12のスリット周期をw0(μm)、第1格子14のスリット周期をw1(μm)とすると、スリット周期w0は下記式により求めることができる。
w0=w1・(d3+d4)/d4
当該式を満たすようにスリット周期w0を決定することにより、マルチ格子12及び第1格子14の各スリットを通過したX線により形成される自己像が、それぞれ第2格子15上で重なり合い、いわばピントが合った状態とすることができる。
【0065】
第1格子14は、マルチ格子12と同様にx方向に複数のスリットが設けられた回折格子である。第1格子14は、マルチ格子12と同様にUVを用いたフォトリソグラフィーによって形成することもできるし、いわゆるICP法によりシリコン基板に微細細線で深掘加工を行い、シリコンのみで格子構造を形成することとしてもよい。第1格子14のスリット周期は1〜20(μm)である。スリットの幅はスリット周期の20〜70(%)であり、好ましくは35〜60(%)である。スリットの高さは1〜100(μm)である。
【0066】
第1格子14として位相型を用いる場合、スリットの高さ(z方向の長さ)はスリット周期を形成する2種の素材、つまりX線透過部とX線遮蔽部の素材による位相差(X線の位相差)がπ/8〜15×π/8となる高さとする。好ましくは、π/4〜3×π/4となる高さである。第1格子14として吸収型を用いる場合、スリットの高さはX線遮蔽部によりX線が十分吸収される高さとする。
【0067】
第1格子14が位相型である場合、第1格子14と第2格子15間の距離d4は、次の条件をほぼ満たすことが必要である。
d4=(m+(1/2))・w12/λ
なお、mは整数であり、λはX線の波長である。
【0068】
第2格子15は、マルチ格子12及び第1格子14と同様にx方向に複数のスリットが設けられた回折格子である。第2格子15もフォトリソグラフィーにより形成することができる。第2格子15のスリット周期は1〜20(μm)である。スリットの幅はスリット周期の30〜70(%)であり、好ましくは35〜60(%)である。スリットの高さは1〜100(μm)である。
【0069】
本実施例では第1格子14及び第2格子15は、それぞれの格子面がz方向に対し垂直(x−y平面内で平行)であり、第1格子のスリット配列方向と第2格子のスリット配列方向とは、x−y平面内で所定角度だけ傾けて配置されているが、両者を平行な配置としてもよい。
【0070】
第1格子14及び第2格子15は、それぞれ、ほぼ同様の構成を有する第1格子ユニット140及び第2格子ユニット150に設けられている。
図26は、基台部19における第1格子ユニット140及び第2格子ユニット150の取り付け部分を拡大した斜視図である。図26に示すように、第2格子ユニット150は、第2格子15がX線検出器16のすぐ上に位置するように配置される。また、第1格子ユニット140は、第1格子14が第2格子15の上方に位置するように配置される。
【0071】
また、図27及び図28は、第1格子ユニット140を上側から見た斜視図であり、図29は斜め上方向から見た斜視図である。なお、第2格子ユニット150は、第1格子ユニット140と同一の構成となっているため、図示及び説明を省略する。
【0072】
第1格子ユニット140は、図27から図29に示すように、基台部19に取り付けられるほぼL字状の基台取付部141と第1格子ユニット本体142とを備えている。この第1格子ユニット本体142は、基台取付部141における床面に対してほぼ水平に配置されている面に載置されている。
基台取付部141は、基台部19への取り付け位置を調整することにより、第1格子14と、第2格子15やマルチ格子12との間における相対距離を調整可能とする相対距離調整機構として機能する。
また、第1格子ユニット本体142の上側面には、第1格子14をx方向に移動させるためのリニアガイド143が設けられている。
【0073】
第1格子ユニット本体142には、支持部14aに支持された第1格子14が設けられている他、第1格子14を移動させるための第1格子駆動部145として、x方向移動用モータ145a、第1格子14をx方向に回転させるためのθx回転用モータ145bが設けられている。
【0074】
x方向移動用モータ145aは、通電駆動される駆動源であり、マルチ格子ユニット120のx方向移動用モータ125aと同様に、例えばパルス信号に正確に同期して動作するステッピングモータ(パルスモータ)等、高精度の動作制御を行うことのできるモータにより構成されている。
本実施形態では、駆動源であるx方向移動用モータ145aが駆動すると、当該駆動源の出力を被駆動部である第1格子14を支持する支持部14aまで伝達する伝達系を構成するボールねじ144が回転し、支持部14aに支持された第1格子14がリニアガイド143にガイドされてx方向に移動するようになっている。
駆動源であるx方向移動用モータ145aと伝達系であるボールねじ及びリニアガイドによって第1格子ユニット140の移動部が構成されており、この移動部は重力方向(z方向)と直交する方向に移動する移動要素のみにより構成されている。
【0075】
ここで、適切なモアレ画像を得るためには、x方向移動用モータ145aによる第1格子14の格子送り精度は、マルチ格子12の場合と同様に、格子送り量の1/10以下である必要がある。例えば、第1格子14を5回移動させて5回撮影することによりモアレ画像を得る場合には、格子ピッチの1/5ずつ第1格子14を移動させ、第1格子14を3回移動させて3回撮影することによりモアレ画像を得る場合には、格子ピッチの1/3ずつ第1格子14を移動させることとなる。したがって、例えば、格子ピッチが5.3μmであり、その格子送り量が1.33μmである場合、要求される精度(格子相対位置)は、±0.05μm(P-P:0.10μm)となる。
そして、x方向移動用モータ145aに電流をかけるとx方向移動用モータ125aの場合と同様、モータの温度が上昇し、周辺部品の熱膨張を誘発し、結果として最終的な第1格子14の精密送りが達成できず、静的な格子間のアライメント不良を生じたり、モータが微振動し、この振動が周辺部品に伝搬し、結果として第1格子14が精密送りされた位置に保持できず、動的な格子間のアライメント不良(不定)を生じてしまう。
【0076】
このため、x方向移動用モータ145aについても、x方向移動用モータ125aの場合と同様、第1格子14を移動させる際には、x方向移動用モータ145aの出力を最大とするが、X線照射時には、第1格子駆動部145は、x方向移動用モータ145aへの通電電流が、当該モータの出力を最大としたときに第1格子14に生じる変位量の50%以下となるような電流値となるようにx方向移動用モータ145aへの通電電流値を調整するようになっている。
なお、X線照射時におけるx方向移動用モータ145aへの通電電流値(励磁電流値)は、x方向移動用モータ125aの場合と同様、適用するモータに応じて適宜設定することが好ましい。
【0077】
θx回転用モータ145bは、例えば駆動源となるアクチュエータ等を内蔵したゴニオステージであり、マルチ格子12、第1格子14及び第2格子15相互間における平行度を調整可能とする煽り調整機構として機能するものである。なお、マルチ格子ユニット120の場合と同様に、煽り調整機構としてθy回転用モータ、θz回転用モータを設けてもよい。
【0078】
第2格子ユニット本体152には、支持部に支持された第2格子15が設けられている他、第2格子15を移動させるための第2格子駆動部155として、x方向移動用モータ、第2格子15をx方向に回転させるためのθx回転用モータ(いずれも図示せず)が設けられている。
なお、前記のように、X線照射時における通電電流値(励磁電流値)を調整する点等については、第2格子15の第2格子駆動部155のx方向移動用モータについても、マルチ格子ユニット120のx方向移動用モータ125a、第1格子ユニット140のx方向移動用モータ145a同様である。
【0079】
上記マルチ格子12、第1格子14、第2格子15は、例えば下記のように構成することができる。
X線源11のX線管の焦点径;300(μm)、管電圧:40(kVp)、付加フィルタ:アルミ1.6(mm)
X線源11の焦点からマルチ格子12までの距離d1:40(mm)
マルチ格子12から第1格子14までの距離d3:1110(mm)
マルチ格子12から第2格子15までの距離d3+d4:1370(mm)
マルチ格子12のサイズ:10(mm四方)、スリット周期:22.8(μm)
第1格子14のサイズ:50(mm四方)、スリット周期:4.3(μm)
第2格子15のサイズ:50(mm四方)、スリット周期:5.3(μm)
【0080】
X線検出器16は、照射されたX線に応じて電気信号を生成する変換素子が2次元状に配置され、当該変換素子により生成された電気信号を画像信号として読み取る。
X線検出器16の画素サイズは10〜300(μm)であり、さらに好ましくは50〜200(μm)である。
【0081】
X線検出器16は第2格子15に当接するように基台部19に位置を固定することが好ましい。第2格子15とX線検出器16間の距離が大きくなるほど、X線検出器16により得られるモアレ画像がボケるからである。
X線検出器16としては、FPD(Flat Panel Detector)を用いることができる。FPDには、X線をシンチレータを介して光電変換素子により電気信号に変換する間接変換型、X線を直接的に電気信号に変換する直接変換型があるが、何れを用いてもよい。
【0082】
間接変換型は、CsIやGd2O3あるいはGd2O2S等のシンチレータプレートの下に、光電変換素子がTFT(薄膜トランジスタ)とともに2次元状に配置されて各画素を構成する。X線検出器16に入射したX線がシンチレータプレートに吸収されると、シンチレータプレートが発光する。この発光した光により、各光電変換素子に電荷が蓄積され、蓄積された電荷は画像信号として読み出される。
【0083】
直接変換型は、アモルファスセレンの熱蒸着により、100〜1000(μm)の膜厚のアモルファスセレン膜がガラス上に形成され、2次元状に配置されたTFTのアレイ上にアモルファスセレン膜と電極が蒸着される。アモルファスセレン膜がX線を吸収するとき、電子正孔対の形で物質内にキャリアが遊離され、電極間の電圧信号がTFTにより読み取られる。
なお、CCD(Charge Coupled Device)、X線カメラ等の撮影手段をX線検出器16として用いてもよい。
【0084】
X線撮影時のFPDによる一連の処理を説明する。
まずFPDはリセットを行い、前回の撮影(読取)以降に残存する不要な電荷を取り除く。その後、X線の照射が開始するタイミングで電荷の蓄積が行われ、X線の照射が終了するタイミングで蓄積された電荷が画像信号として読み取られる。なお、リセットの直後や画像信号の読み取り後に、蓄積されている電荷の電圧値を検出するダーク読み取りを行い、当該電圧値を補正値としてX線照射後に蓄積された電荷の電圧値から補正値を差し引いた電圧値を画像信号として出力してもよい。これにより、画像信号に対しいわゆるオフセット補正を行うことができる。
【0085】
本体部18は、図30に示すように、制御部181、操作部182、表示部183、通信部184、記憶部185、マルチ格子駆動部125、第1格子駆動部145、第2格子駆動部155を備えて構成されている。
制御部181は、CPU(Central Processing Unit)やRAM(Random Access Memory)等から構成され、記憶部185に記憶されているプログラムとの協働により、各種処理を実行する。例えば、制御部181はコントローラ5から入力される撮影条件の設定情報に従って、X線源11からのX線照射のタイミングやX線検出器16による画像信号の読取タイミング等を制御する。
【0086】
操作部182は曝射スイッチや撮影条件等の入力操作に用いるキー群の他、表示部183のディスプレイと一体に構成されたタッチパネルを備え、これらの操作に応じた操作信号を生成して制御部181に出力する。
表示部183は制御部181の表示制御に従って、ディスプレイに操作画面や関節撮影装置1の動作状況等を表示する。
【0087】
通信部184は通信インターフェイスを備え、ネットワーク上のコントローラ5と通信する。例えば、通信部184はX線検出器16によって読み取られ、記憶部185に記憶されたモアレ画像をコントローラ5に送信する。
記憶部185は、制御部181により実行されるプログラム、プログラムの実行に必要なデータを記憶している。また、記憶部185はX線検出器16によって得られたモアレ画像を記憶する。
【0088】
マルチ格子駆動部125、第1格子駆動部145、第2格子駆動部155は、マルチ格子ユニット120、第1格子ユニット140、第2格子ユニット150の各駆動源(モータ)を動作させるものである。
【0089】
コントローラ5は、オペレータによる操作に従って関節撮影装置1の撮影動作を制御し、関節撮影装置1により得られたモアレ画像を用いて被写体の再構成画像を作成する。本実施形態では被写体の再構成画像を作成する画像処理装置としてコントローラ5を用いた例を説明するが、X線画像に様々な画像処理を施す専用の画像処理装置を関節撮影装置1と接続し、当該画像処理装置により再構成画像の作成を行うこととしてもよい。
【0090】
上記関節撮影装置1のタルボ・ロー干渉計によるX線撮影方法を説明する。
図31に示すように、X線源11から照射されたX線が第1格子14を透過すると、透過したX線がz方向に一定の間隔で像を結ぶ。この像を自己像といい、自己像が形成される現象をタルボ効果という。自己像を結ぶ位置に第2格子15が平行に配置され、当該第2格子15はその格子方向が第1格子14の格子方向と平行な位置からわずかに傾けられているので、第2格子15を透過したX線によりモアレ画像Mが得られる。X線源11と第1格子14間に被写体Hが存在すると、被写体HによってX線の位相がずれるため、図31に示すようにモアレ画像M上の干渉縞は被写体Hの辺縁を境界に乱れる(歪む)。この干渉縞の乱れ(歪み)を、モアレ画像Mを処理することによって検出し、被写体像を画像化することができる。これがタルボ干渉計の原理である。
【0091】
関節撮影装置1では、X線源11と第1格子14との間のX線源11に近い位置に、マルチ格子12が配置され、タルボ・ロー干渉計によるX線撮影が行われる。タルボ干渉計はX線源11が理想的な点線源であることを前提としているが、実際の撮影にはある程度焦点径が大きい焦点が用いられるため、マルチ格子12によってあたかも点線源が複数連なってX線が照射されているかのように多光源化する。これがタルボ・ロー干渉計によるX線撮影法であり、焦点径がある程度大きい場合にも、タルボ干渉計と同様のタルボ効果を得ることができる。
【0092】
従来のタルボ・ロー干渉計では、マルチ格子12は上述のように多光源化と照射線量の増大を目的に用いられ、縞走査法によりモアレ画像を得るため、第1格子14又は第2格子15を相対移動させていた。しかし、本実施形態では、第1格子14又は第2格子15を相対移動させるのではなく、第1格子14及び第2格子15の位置は固定したまま、第1格子14及び第2格子15に対してマルチ格子を移動させることで一定周期間隔のモアレ画像を複数得る。
【0093】
図32は、関節撮影装置1によるX線撮影の流れを示すフローチャートである。
X線撮影には上述のタルボ・ロー干渉計によるX線撮影方法が用いられ、被写体像の再構成には縞走査法が用いられる。関節撮影装置1ではマルチ格子12が等間隔毎に複数ステップ移動され、ステップ毎に撮影が行われて、各ステップのモアレ画像が得られる。
【0094】
ステップ数は2〜20、さらに好ましくは3〜10である。視認性の高い再構成画像を短時間で得るという観点からすれば、5ステップが好ましい(参照文献(1)K.Hibino, B.F.Oreb and D.I.Farrant, Phase shifting for nonsinusoidal wave forms with phase−shift errors, J.Opt.Soc.Am.A, Vol.12, 761−768(1995)、参照文献(2)A.Momose, W.Yashiro, Y. Takeda, Y.Suzuki and T.Hattori, Phase Tomography by X−ray Talbot Interferometetry for biological imaging, Jpn. J. Appl. Phys., Vol.45, 5254−5262(2006))。
【0095】
図32に示すように、オペレータにより曝射スイッチがON操作されると(ステップS1;Y)、x方向移動用モータ125aによりマルチ格子12が移動され、複数ステップの撮影が実行され、モアレ画像が生成される(ステップS2)。
まず、マルチ格子12が停止した状態でX線源11によるX線の照射が開始される。X線検出器16ではリセット後、X線照射のタイミングに合わせて電荷が蓄積され、X線の照射停止のタイミングに合わせて蓄積された電荷が画像信号として読み取られる。これが1ステップ分の撮影である。1ステップ分の撮影が終了するタイミングでマルチ格子12の移動が開始され、所定量移動すると停止され、次のステップの撮影が行われる。このようにして、マルチ格子12の移動と停止が所定のステップ数分だけ繰り返され、マルチ格子12が停止したときにX線の照射と画像信号の読み取りが行われる。読み取られた画像信号はモアレ画像として本体部18に出力される。
【0096】
例えば、マルチ格子12のスリット周期を22.8(μm)とし、5ステップの撮影を10秒で行うとする。マルチ格子12がそのスリット周期の1/5に該当する4.56(μm)移動し停止する毎に撮影が行われる。撮影時間でいえば爆射スイッチON後、2、4、6、8、10秒後にそれぞれ撮影が行われる。
【0097】
従来のように第2格子15(又は第1格子14)を第1格子14(又は第2格子15)に対して移動させる場合、第2格子15のスリット周期は比較的小さく、各ステップの移動量も小さくなるが、マルチ格子12のスリット周期は第2格子15よりも比較的大きく、各ステップの移動量も大きい。例えば、スリット周期5.3(μm)の第2格子15のステップ毎の移動量は1.06(μm)であるのに対し、スリット周期22.8(μm)のマルチ格子12の移動量は4.56(μm)と約4倍の大きさである。同一の駆動伝達系(駆動源、減速伝達系を含む)を使用し、各ステップの撮影に際し、x方向移動用モータ125aの起動と停止を繰り返して撮影を行った場合、移動用のパルスモータ(駆動源)の制御量(駆動パルス数)に対応した実際の移動量に占める、起動時及び停止時のx方向移動用モータ125aのバックラッシュ等の影響による移動量誤差の割合は、本実施形態のようにマルチ格子12を移動させる方式の方が小さくなる。これは、後述するサインカーブに沿ったモアレ画像を得やすく、起動及び停止を繰り返しても高精細な再構成画像が得られることを示している。或いは、従来方式による画像でも充分診断に適合する場合には、モータ(駆動源)を含む駆動伝達系全体の精度(特に、起動特性及び停止特性)を緩和し、駆動伝達系を構成する部品のコストダウンが可能であることを示している。
【0098】
各ステップの撮影が終了すると、本体部18からコントローラ5に、各ステップのモアレ画像が送信される(ステップS3)。本体部18からコントローラ5に対しては各ステップの撮影が終了する毎に1枚ずつ送信することとしてもよいし、各ステップの撮影が終了し、全てのモアレ画像が得られた後、まとめて送信することとしてもよい。
【0099】
図33は、モアレ画像を受信した後のコントローラ5の処理の流れを示すフローチャートである。
図33に示すように、まずモアレ画像の解析が行われ(ステップS11)、再構成画像の作成に使用できるか否かが判断される(ステップS12)。理想的な送り精度によりマルチ格子12を一定の送り量で移動できた場合、図34に示すように、5ステップの撮影でマルチ格子12のスリット周期1周期分のモアレ画像5枚が得られる。各ステップのモアレ画像は0.2周期という一定周期間隔毎に縞走査をした結果であるので、各モアレ画像の任意の1画素に注目すると、その信号値を正規化して得られるX線相対強度は、図35に示すようにサインカーブを描く。よって、コントローラ5は得られた各ステップのモアレ画像のある画素に注目してX線相対強度を求める。各モアレ画像から求められたX線相対強度が、図35に示すようなサインカーブを形成すれば、一定周期間隔のモアレ画像が得られているので、再構成画像の作成に使用できると判断することができる。
なお、上記サインカーブ形状は、マルチ格子開口幅、位相格子の周期、及び位相格子の格子間距離に依存し、また、放射光のようなコヒーレント光の場合には三角波形状となるが、マルチ格子効果によりX線が準コヒーレント光として作用する為、サインカーブを描くものとなる。
【0100】
各ステップのモアレ画像の中にサインカーブを形成できないモアレ画像がある場合、再構成画像の作成に使用できないと判断され(ステップS12;N)、撮影のタイミングを変更して再撮影するよう指示する制御情報がコントローラ5から関節撮影装置1に送信される(ステップS13)。例えば、図27に示すように、3ステップ目は本来0.4周期のところ、周期がずれて0.35周期のモアレ画像が得られた場合であれば、x方向移動用モータ125aの送り精度の低下が原因(例えば、パルスモータの駆動パルスへのノイズ重畳等)と考えられる。よって、0.05周期分だけ撮影のタイミングを早めて3ステップ目のみ再撮影を行うよう指示すればよい。或いは、5ステップ全てについて再撮影し、3ステップ目のみ0.05周期分の撮影時間を早めるように指示してもよい。5ステップ全てのモアレ画像が所定量ずつサインカーブからずれている場合、x方向移動用モータ125aの起動から停止までの駆動パルス数を増やすか、或いは減らすように指示してもよい。
関節撮影装置1では、当該制御情報に従って撮影のタイミングが調整され、図32に示すX線撮影の処理が再度実行される。
【0101】
一方、再構成画像の作成にモアレ画像を使用できると判断された場合(ステップS12;Y)、コントローラ5によってモアレ画像が処理され、被写体の再構成画像が作成される(ステップS14)。具体的には、5枚のモアレ画像の各画素についてステップ毎の強度変化(信号値の変化)が算出され、当該強度変化より微分位相が算出される。必要であれば、位相接続(位相アンラップ)が行われ、ステップ全体の位相が求められる。当該位相からz方向における光路差(屈折率差に起因する光路差)が算出され、被写体の形状を表す再構成画像が作成される(上記参照文献(1)、(2))。作成された再構成画像はコントローラ5に表示されるので、オペレータは当該再構成画像を確認することができる。
【0102】
以上のように、本実施形態によれば、関節撮影装置1は、人の手指等の被写体の関節部分を撮影する関節撮影装置1において、被写体台13は、撮影対象部分である関節部分をX線源11からのX線照射方向に対して所定の位置に固定する撮影対象固定ユニット33と、この撮影対象固定ユニットを着脱可能に構成され、被写体の手首部分を固定するベースユニット31とを備えている。これにより、患者が既にリウマチを発症している場合のように、関節部分等に病変を生じて痛みがある場合等、関節部分等を真っ直ぐに伸ばして被写体台13の上に載置ことが難しい場合でも、患者に負担をかけることなく撮影対象をしっかりと固定して撮影中の撮影対象のぶれや揺れ等を抑えることができる。
また、ベースユニット31に設けられている手首固定用ベルト313により手首を固定した上で、撮影対象固定ユニット33により撮影対象部分である関節部分を撮影に適した所定の位置に固定することができるため、患者が関節部分等を真っ直ぐに伸ばすことができない場合でも、被写体保持部材30から被写体が浮き上がらないようにすることができ、安定して固定することができる。このため、手指の震えや体動等により被写体が動いてしまうことを防止でき、画像のぶれや再撮影が生じるおそれ等を防ぐことができる。
また、撮影対象固定ユニット33として第1の撮影対象固定ユニット33aから第5の撮影対象固定ユニット33eを備えているため、撮影の目的や撮影対象部位、患者の手指の関節の状態等に応じて、ユーザである技師が最も適したものを選択することができる。このため、患者の負担をより少なくしながら、診断に適した画像を得ることができる。
また、複数のスリットを有するマルチ格子、及び/又は、第1の位相格子及び第2の位相格子を備え、モアレ画像を形成可能となっているため、縞走査方式により関節部分の撮影を行うことができ、X線吸収差が小さく、吸収コントラスト法によっては画像として現れにくい関節軟骨、関節周辺の軟部組織について診断に適した画像を得ることができる。
【0103】
なお、上記実施形態は本発明の好適な一例であり、本発明の範囲はこれに限定されない。
例えば、本実施形態では、被写体保持部材30を構成する撮影対象固定ユニット33として第1の撮影対象固定ユニット33aから第5の撮影対象固定ユニット33eの5種類が用意され、これらのうちから任意に選択してベースユニット31に装着できるように構成する例を示したが、撮影対象固定ユニット33の種類や数はこれに限定されない。
例えば、これらのうちのいずれか1つのみを備えてもよいし、他の形状の撮影対象固定ユニット33をさらに備えていてもよい。
【0104】
また、本実施形態では、関節撮影装置1によって手指の関節部分を撮影する場合について説明し、被写体保持部材30についても手指の撮影対象部位を保持・固定するものについて説明したが、関節撮影装置1によって撮影可能な部位は手指の関節部分に限定されず、例えば、肩や、足首、膝等の関節部分を撮影することも可能である。
この場合には、X線源11の光照射野内に肩、足首、膝等の関節部分を位置させるために、被写体台13の上に患者の脚部等を載置する必要がある。このため、患者の体重がかかっても被写体台13の本体や被写体台13の下方に位置する第1格子、第2格子等に負荷がかかったり影響が及ぶことがないように、例えば図36に示すような被写体台13の被写体台上面板3の上に被写体支持板7を配置する。被写体支持板7は、例えば支持板本体71とその裏面側に設けられた脚部72から構成されており、支持板本体71において
被写体台上面板3の透明板部材305に対応する部分にはX線源11から照射されるX線を妨げないように開口部73が設けられている。被写体支持板7の脚部72は、被写体台13の周囲を囲んで設けられているガード部材41の上端面に載置されるようになっている。このように、被写体支持板7をガード部材41の上端面で支持することによって被写体支持板7にかかった荷重や衝撃をガード部材41が吸収し、被写体台13や第1格子、第2格子等に衝撃等が及ぶことを防ぐことができる。
【0105】
また、肩、足首、膝等の関節部分を撮影する場合等、患者が全身を横たえて撮影を行う必要があるような場合には、図37に示すように適宜補助台8を被写体台13又は被写体支持板7に連結してもよい。
補助台8は、例えばキャスタ83を備える補助台基台部81と補助台上面板82とで構成されている。患者が補助台8に乗った際に補助台8が安定するように、補助台基台部81のキャスタ83にはキャスタ83をロックする図示しないロック機構が設けられていることが好ましい。各補助台8は他の補助台8や被写体台13(又は被写体支持板7)と互いに連結可能に構成されており、連結された際にはがたつき等が生じないように互いにロックする機構が設けられていることが好ましい。補助台8は、患者の身長や撮影部位等に応じて適宜必要な数だけ連結して用いられる。このように自由に連結して用いられるようにすることにより、1台の関節撮影装置1により各種の撮影に柔軟に対応することが可能となる。
【0106】
図38は、患者の左肩の関節部分を撮影する場合に、患者の頭部の側に1つ、下半身側に2つの補助台8を連結して撮影を行う例を示したものである。身体に角度を付けて撮影する必要があるような場合には、さらに患者の身体の下に適宜図示しないクッション等の補助部材を配置して調整する。
また、図39は、患者の右足首の関節部分を撮影する場合に、患者の頭部の側に1つ、下半身側に1つの補助台8を連結して撮影を行う例を示したものである。図39では、足首の角度を一定に保つために、クッション等の補助部材75をつま先部分の下に入れて調整する場合を示している。
また、図40は、患者の右膝の関節部分を撮影する場合に、図39に示した足首の撮影の場合と同様に、患者の頭部の側に1つ、下半身側に1つの補助台8を連結して撮影を行う例を示したものである。図40では、膝の角度を一定に保つために、クッション等の補助部材75を膝の下に入れて調整する場合を示している。
また、図41は、患者の左膝の関節部分を背面側から撮影する場合に、図39に示した足首の撮影の場合と同様に、患者の頭部の側に1つ、下半身側に1つの補助台8を連結するとともに、患者の頭部の側に配置した補助台8の上に患者の頭部側が高くなるように傾斜した補助板85を配置した例を示している。このような補助板85を用いた場合には、例えば図41に示すように、患者が上半身を反らせた姿勢を保った状態で撮影を行うことができる。なお、補助板85は補助台8と別体である場合に限定されず、例えば補助台上面板82にリクライニング機構を設けてリクライニング可能に構成する等、補助台8と一体的に設けられていてもよい。この場合には、複数段階の角度でリクライニング可能とすることが好ましい。また、この場合、すべての補助台8にリクライニング機構を設けてもよいし、一部の補助台8のみにリクライニング機構を設けて、リクライニング機構を備える補助台8と備えない補助台8とを適宜組み合わせて使用するようにしてもよい。
また、図42に示すように、補助台8を用いず、患者が市販のストレッチャー(stretcher:寝台車)9に乗ったまま、脚部を被写体支持板7の支持板本体71の上に載置して撮影を行ってもよい。
また、図37から図41では、連結可能な複数の補助台8を用いて撮影を行う場合を例示したが、被写体支持板7と補助台8とが一体となった寝台型の被写体保持台(図示せず)を用いて撮影を行ってもよい。この場合には、例えば被写体保持台の脚部を関節撮影装置1の被写体台13と干渉しない位置に設け、患者を乗せた被写体保持台を関節撮影装置1の前面側から横付けし、患者の撮影対象部位が関節撮影装置1の光照射野内に位置するように配置して撮影を行う。
なお、被写体支持板7や補助台8等は、撮影中、撮影対象である各部の関節部分等をX線源11の光照射野内に適切に保持・固定できるものであればよく、ここに例示したものに限定されない。その形状、構成等は、撮影対象部位等に応じて適宜変更可能である。
【0107】
また、上記実施形態では、被写体台上面板3に高さ調整のための機能を設ける構成としたが、被写体台13の脚部132に高さ調整のための機構を設けて、被写体台13自体の高さを調整するようにしてもよい。
【0108】
また、タルボ干渉計及びタルボ・ロー干渉計を用いて取得された再構成画像においては、周囲とのX線屈折率の差が大きい部分ほど大きな信号値として現れる。そのため、被写体内部の構造物(例えば、軟部組織周辺部等)を関心領域として撮影を行った場合、被写体表面に形状変化(例えば、皮部分の皺等)があると、被写体表面と周囲の空気とのX線屈折率差が比較的大きいため被写体表面の形状変化を示す信号値が大きく現れてしまい、関心領域の構造を示す微小な信号値の変化と重畳し、当該関心領域の信号値の視認性が悪くなってしまう。
【0109】
被写体表面の皮部分(皺を含む)と被写体内部の関心領域(軟部組織周辺部)とがz方向に重畳していなければ、関心領域(軟部組織周辺部)は空気中の撮影でも視認可能であるが、被写体内部の関心領域が被写体表面構造に対し、どのような相対位置関係にあるかを撮影前に把握するのは困難である。
そこで、図43に示すように、被写体表面と周囲とのX線屈折率差を低減させる液状物511を内部に保持する屈折率調整タンク51を被写体台13に設けて、撮影時には、この液状物511の中に被写体(ここでは手)を入れて撮影を行ってもよい。
被写体表面と周囲とのX線屈折率差を低減させる液状物511は、例えば水である。水は、空気よりもX線屈折率が被写体表面に近い。また、水中に手を入れれば、被写体表面は水で覆われ、水は水圧により被写体表面に密着する。よって、被写体表面とその周囲とのX線屈折率の差は低減される。
なお、被写体を覆う液状物511としては、水がもっとも簡便、安価、安全であり、好ましいが、水に香料、消毒薬、色素など添加して患者の安心感を増す工夫を施したものを用いてもよい。また、水ではなく、より人体の肉や体液に近い液状物511を使用することは好ましい態様である。例えばヒアロルン酸溶液、ゼラチン溶液、グリセリン溶液、マンノース溶液、米汁、片栗粉液等を単独で又は水との溶液としたものを使用することができる。
【0110】
なお、タルボ干渉計やタルボ・ロー干渉計を用いて撮影を行う場合、複数のモアレ画像を撮影するため、撮影時間が従来の単純X線撮影系と比べて長くなることが想定される(数分レベル)。この間、被写体が動いてしまう可能性がある。この点、液状物511を内部に保持した屈折率調整タンク51の中に被写体(ここでは手)を入れて撮影を行えば、水圧によって被写体を押さえて固定させることができる。屈折率調整タンク51は、例えば図43に示すように、浮蓋512を有するとともに、パイプ513を介してサブタンク514に接続された構成とすることが好ましい。このような構成の屈折率調整タンク51を用いて撮影を行うことにより、被写体を圧迫して押さえることで撮影時の被写体のz方向、特に、X線管球方向への動きを抑えることができ、再構成画像の診断精度を向上させることができる。なお、被写体をより安定させるため、被写体台13は肘から指先までを保持できるだけの長さを有することが好ましい。これは患者が撮影対象周辺部の荷重(体重)を被写体台に預けることができ、従って、関心領域である指を不意に動かす確率を極めて低くすることが可能となる。
【0111】
また、上記実施形態では、X線源11、マルチ格子12、被写体台13、第1格子14、第2格子15、X線検出器16をこの順に配置(以下、第1の配置と呼ぶ)したが、X線源11、マルチ格子12、第1格子14、被写体台13、第2格子15、X線検出器16の配置(以下、第2の配置と呼ぶ)としても、第1格子14及び第2格子15は固定のまま、マルチ格子12の移動により、再構成画像を得ることが可能である。
第2の配置においては、被写体の厚み分だけ、被写体中心と第1格子14は離れることになり、上記の実施形態に比べ感度の点でやや劣ることになるが、一方で、被写体への被曝線量低減を考慮すると、当該配置の方が第1格子14でのX線吸収分だけX線を有効に活用していることになる。
また、被写体位置での実効的な空間分解能は、X線の焦点径、検出器の空間分解能、被写体の拡大率、被写体の厚さ等に依存するが、上記実施例に於ける検出器の空間分解能が120μm(ガウスの半値幅)以下の場合には、第1の配置よりも第2の配置の方が実効的な空間分解能は小さくなる。
感度、空間分解能、及び、第1格子14でのX線吸収量等を考慮して、第1格子14、被写体台13の配置順をきめることが好ましい。
【0112】
また、本実施形態では、縞走査方式として、マルチ格子、第1格子及び第2格子を備えるタルボ・ロー干渉計を用いた関節撮影装置を例として説明したが、関節撮影装置に用いられるのはタルボ・ロー干渉計に限定されず、縞走査方式として、第1格子及び第2格子を備えるタルボ干渉計を用いた関節撮影装置についても本発明を適用することができる。
さらに、関節撮影装置は、縞走査方式を用いたものに限定されない。例えば、一次元格子や2次元格子を用いた縞走査不要のフーリエ変換方式や、通常の位相コントラスト方式による撮影を行う関節撮影装置に本発明を適用してもよく、被写体の体動リスクをより低減することができ好ましい。
【0113】
また、本実施形態では、被写体台13を完全に別体構成としたものを例として説明したが、被写体台13を基台部19等に固定してもよい。この場合には、被写体台13と基台部19との間に緩衝部材等を設けて、被写体台13に加えられた衝撃や振動ができる限り基台部19に伝達されないように構成する。
また、被写体台13は、その高さを患者の体型等に応じて調整できるようにしてもよい。
【0114】
また、本実施形態では、マルチ格子ユニット120、第1格子ユニット140、第2格子ユニット150にそれぞれ煽り調整機構及び相対距離調整機構が設けられている場合を例として説明したが、煽り調整機構及び相対距離調整機構は、マルチ格子ユニット120、第1格子ユニット140、第2格子ユニット150全てに設けられている必要はなく、このうちの少なくともいずれか1つに設けられていてもよい。
【0115】
また、本実施形態では、マルチ格子12を移動させてモアレ画像を生成する場合を例として説明したが、モアレ画像を生成するために移動させる格子はマルチ格子12に限定されず、第1格子14、第2格子15であってもよい。
【0116】
また、X線検出器16として、バッテリを内蔵し、無線により画像信号を本体部18に出力するケーブルレスのカセッテタイプFPDを用いてもよい。カセッテタイプFPDによれば、本体部18に接続するケーブル類を排除することができ、X線検出器16周辺の更なる小スペース化を図ることができる。小スペース化によって被写体の足下を広く構成し、より患者が接触し難い構成とすることができる。
【0117】
また、コントローラ5の制御部が縞走査法による再構成画像作成処理の他、フーリエ変換法による再構成画像作成処理等を行うようにしてもよい(この場合、関節撮影装置の第1格子と第2格子との相対角のみ、縞走査法の場合に対し増大させるような装置設定変更が必要である。)。
例えば、フーリエ変換法による再構成画像作成処理は、以下のように行われる。
まず、被写体有りのモアレ画像と被写体無しのモアレ画像とを取得し、それぞれについてオフセット補正処理、ゲイン補正処理等の補正を行う。その後、補正後の被写体有りのモアレ画像と被写体無しのモアレ画像のそれぞれをフーリエ変換(二次元フーリエ変換)する。1枚のモアレ画像をフーリエ変換すると、低周波成分(0次成分と呼ぶ)と干渉縞周波数付近の成分(1次成分と呼ぶ)、又は、0次成分と1次成分に加えさらに高周波成分(関節撮影装置1の干渉性に依存)が並んで得られる。
次いで、フーリエ変換により得られた画像(被写体有り、被写体無しのそれぞれ)において、0次成分をHanning窓により切り出される。Hanning窓で切り出すことによりHanning窓の周辺部が0に落とされ、Hanning窓の中心部はそのまま通される。
次いで、フーリエ変換により得られた画像において、1次成分がキャリア周波数(=モアレ周波数)分シフトされ、Hanning窓で切り出される。切り出しの窓関数はHanning窓に限定されず、用途に応じてHamming窓、ガウス窓等を使用してもよい。
次いで、切り出された0次成分、1次成分のそれぞれが逆フーリエ変換される。
逆フーリエ変換が終了すると、逆フーリエ変換された0次成分、1次成分を用いて被写体有りと被写体無しのそれぞれの再構成画像の作成が行われる。具体的には、0次成分の振幅から吸収画像が作成される。また、1次成分の位相から位相画像が作成される。また、0次成分と1次成分の振幅の比(=Visibility)から小角散乱画像が作成される。
次いで、被写体無しの再構成画像を用いて被写体有りの再構成画像から干渉縞の位相の除去と、画像ムラ(アーチファクト)を除去するための補正処理が行われ、この画像ムラの補正が終了すると、フーリエ変換法による再構成画像作成処理は終了する。
【0118】
その他、本発明が本実施形態に限定されず、適宜変更可能であることはいうまでもない。
【符号の説明】
【0119】
1 関節撮影装置
5 コントローラ
11 X線源
12 マルチ格子
13 被写体台
14 第1格子
15 第2格子
16 X線検出器
17 支柱
17a 緩衝部材
18 本体部
19 基台部
21 第1のカバーユニット
22 第2のカバーユニット
30 被写体保持部材
31 ベースユニット
33 撮影対象固定ユニット
41 ガード部材
【技術分野】
【0001】
本発明は、関節撮影装置に関する。
【背景技術】
【0002】
手・脚等の関節部分の軟骨や関節周辺の軟部組織は、従来の吸収コントラスト法によるX線撮影では診断に適した画像を得ることができないため、関節等のリウマチ診断には、主としてMRIで撮影された画像が用いられてきた。
しかしMRIによる撮影は、患者体位を所定時間機械的に拘束する等の患者負担大きく、また、医療費コストがかかるため、一般的な放射線管球を用いて撮影されたX線画像をリウマチ診断に利用する技術が望まれている。
【0003】
この点、MRIに代わる撮影手法として、例えば、位相コントラスト拡大撮影時のX線の屈折を利用したエッジ強調によって視認性の高いX線画像を得る位相コントラスト法によりX線撮影が提案されている(例えば、特許文献1から特許文献3参照)。
また、位相コントラスト撮影の1つとして、タルボ効果を利用するタルボ干渉計、タルボロー干渉計も検討されている(例えば、特許文献4から特許文献6参照)。タルボ効果とは、一定の周期でスリットが設けられた第1格子を干渉性の光が透過すると、光の進行方向に一定周期でその格子像を結ぶ現象をいう。この格子像は自己像と呼ばれ、タルボ干渉計は自己像を結ぶ位置に第2格子を配置し、この第2格子をわずかにずらすことで生じる干渉縞(モアレ)を測定する。第2格子の前に物体を配置するとモアレが乱れることから、タルボ干渉計によりX線撮影を行うのであれば、第1格子の前に被写体を配置して干渉性X線を照射し、得られたモアレの画像を演算することによって被写体の再構成画像を得ることが可能である。
さらに、1次元または2次元格子を用い、タルボ方式のような走査を不要とするフーリエ変換方式等も開発されている。
【0004】
このような位相コントラスト法を用いたX線撮影は、X線吸収差が小さく、吸収コントラスト法によっては画像として現れにくい乳房の組織や関節軟骨、関節周辺の軟部組織をも画像化することが可能であることから、広く普及している一般的なX線撮影手法を用い、位相コントラスト法を用いて撮影されたX線画像を、例えばリウマチ等、軟骨や軟部組織における病変の診断等に用いることで、患者に強いる負担の低減や医療費削減が期待されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2008−023312号公報
【特許文献2】特開2007−268033号公報
【特許文献3】特開2008−18060号公報
【特許文献4】特開昭58−16216号公報
【特許文献5】国際公開第2004/058070号パンフレット
【特許文献6】特開2007−203063号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
例えばリウマチ診断のために画像撮影を行う場合には、リウマチ未発症のいわば予備軍に対して画像診断を行いリウマチの発症予防、早期発見等を目的とする場合と、既にリウマチを発症している患者について発症後の進行状況(投薬の効き具合等)の確認を目的とする場合とがある。
【0007】
しかしながら、既にリウマチを発症している場合のように、関節部分等に病変を生じている場合には、撮影すべき関心領域である関節部分等の病変箇所には痛みがあるため、健常者のように被写体台に関節部分等を沿わせて真っ直ぐに伸ばすことは難しい場合がある。
また、仮に真っ直ぐに伸ばすことができたとしても、かなりの苦痛を伴い、このような状態で被写体台に固定されることは患者にとって大きな負担であった。
また、病変が発症している関節部分等と被写体台との間に空間があると、元々、病変発症により痛みを伴っているために、手指の震えや体動等により被写体が動いてしまうことが想定される。
走査が不要であり1回の撮影でよいフーリエ変換方式においても、所定の線量を照射するまでの照射時間(撮影時間)が長くなるため、この間に被写体が動くと、生成される画像はぶれてしまう。また、個々の撮影時間自体は短いものの、複数回の走査撮影を行うタルボ(タルボロー)方式においても、各走査の間に被写体が動くと、やはり、生成される画像はぶれてしまう。
【0008】
また、関節部分を撮影する際は、撮影したい関心領域(ROI)であるMCP関節やPIP関節等の頂部を放射線照射軸と略一致させるように技師が患者をポジショニングする必要がある。しかし、痛みを伴う体勢で固定されていると、技師が曝射スイッチ操作のために患者から離れた際に、関心領域が動いてしまうおそれがある。関心領域が移動してしまうと、再撮影が必要となるが、再撮影となった場合には、患者に無駄な被曝をさせることとなってしまう。
【0009】
さらに、撮影の目的や対象部位等によっては、平坦に伸ばした状態よりも軽く関節等を曲げた状態で撮影した方が病変箇所の観察に優れた画像を得ることができる場合もある。しかし、撮影中関節等を曲げた状態を保つことは難しく、位置ずれやぶれを生じやすいという問題もある。
【0010】
本発明は以上のような事情に鑑みてなされたものであり、患者に負担をかけることなく撮影対象をしっかりと固定でき、位置ずれやぶれ等を生じにくい被写体台を備えた関節撮影装置を提供することを目的とするものである。
【課題を解決するための手段】
【0011】
前記課題を解決するために、請求項1に記載の発明によれば、
被写体である人の手指を撮影位置に保持する被写体台と、
前記被写体台の上方に配置され、被写体の撮影対象部分である手指の関節部分に放射線を照射する放射線発生手段、及び前記被写体台の下方に配置され、前記関節部分を透過した放射線を検出する検出手段を有する撮影部と、
を備えている関節撮影装置であって、
前記被写体台は、
前記撮影対象部分である関節部分を前記放射線発生手段からの放射線照射方向に対して所定の位置に固定する撮影対象固定ユニットと、
前記撮影対象固定ユニットを着脱可能に構成され、前記被写体の手首部分を固定するベースユニットと、
を備えている関節撮影装置が提供される。
【0012】
請求項2に記載の発明によれば、
互いに異なる所定の位置に手指の関節部分を固定する複数の前記撮影対象固定ユニットを備え、
当該複数の撮影対象固定ユニットのそれぞれが、前記ベースユニットに着脱可能に構成されている請求項1に記載の関節撮影装置が提供される。
【0013】
請求項3に記載の発明によれば、
前記放射線発生手段からの放射線照射方向と直交する方向に延在して複数のスリットが所定間隔で設けられている第1格子及び第2格子を備えている縞走査型撮影装置である請求項1又は請求項2に記載の関節撮影装置が提供される。
【0014】
請求項4に記載の発明によれば、
前記放射線発生手段近傍に配置されたマルチ格子を備え、
当該マルチ格子を前記第1格子及び前記第2格子に対して相対移動させるタルボ・ロー干渉計である請求項3に記載の関節撮影装置が提供される。
【発明の効果】
【0015】
本発明の撮影装置によれば、人の手指等の被写体の関節部分を撮影する関節撮影装置において、被写体を撮影位置に保持する被写体台に、撮影対象部分である関節部分を放射線発生手段からの放射線照射方向に対して所定の位置に固定する撮影対象固定ユニットとこの撮影対象固定ユニットを着脱可能に構成され、被写体の手首部分を固定するベースユニットとを備えている。これにより、患者が既にリウマチを発症している場合のように、関節部分等に病変を生じて痛みがある場合等、関節部分等を真っ直ぐに伸ばして被写体台の上に載置ことが難しい場合でも、患者に負担をかけることなく撮影対象をしっかりと固定して撮影中の撮影対象のぶれや揺れ等を抑えることができる。
また、ベースユニットにより手首を固定した上で、撮影対象固定ユニットにより撮影対象部分である関節部分を撮影に適した所定の位置に固定することができるため、患者が関節部分等を真っ直ぐに伸ばすことができない場合でも、被写体が浮き上がらないようにすることができ、安定して固定することができる。このため、手指の震えや体動等により被写体が動いてしまうことを防止でき、画像のぶれや再撮影が生じるおそれ等を防ぐことができる。
また、互いに異なる所定の位置に手指の関節部分を固定する複数の撮影対象固定ユニットを備えているため、撮影の目的や撮影対象部位、患者の手指の関節の状態等に応じて、ユーザである技師が最も適したものを選択することができる。このため、1台の装置で様々な状況での撮影に対応することができるとともに、患者の負担をより少なくしながら、診断に適した画像を得ることができる。
また、複数のスリットを有するマルチ格子、及び/又は、第1の位相格子及び第2の位相格子を備えた場合には、縞走査方式により関節部分の複数の撮影を行うが、この複数の撮影の間に撮影対象部分が動かないように被写体を安定して撮影位置に保持できるため、X線吸収差が小さく、吸収コントラスト法によっては画像として現れにくい関節軟骨、関節周辺の軟部組織であっても体動に伴うアーチファクト等の無い診断に適した画像を得ることができる。
【図面の簡単な説明】
【0016】
【図1】本実施の形態に係る関節撮影装置を含むX線画像システムの模式的な側面図である。
【図2】図1に示す関節撮影装置の上面図である。
【図3】図1に示す関節撮影装置の具体的構成を示す斜視図である。
【図4】図3に示す関節撮影装置の各構成部を分離した状態を示す斜視図である。
【図5】図3に示す関節撮影装置の第1のカバーユニットを分解した状態を示す斜視図である。
【図6】図3に示す関節撮影装置の第2のカバーユニットを分解した状態を示す斜視図である。
【図7】図4に示す関節撮影装置にX線検出器保持部取り付ける様子を示す斜視図である。
【図8】図4に示す関節撮影装置にX線検出器保持部取り付けた状態を示す斜視図である。
【図9】被写体台の被写体台上面板を拡大した要部斜視図である。
【図10】図9に示す被写体台の被写体台上面板の中央部近傍の要部を示す拡大断面図である。
【図11】ベースユニット及び第1の撮影対象固定ユニットと、ベースユニットに第1の撮影対象固定ユニットを装着した被写体保持部材とを示す斜視図である。
【図12】被写体台の被写体台上面板の上に第1の撮影対象固定ユニットが装着された被写体保持部材を載置した状態を示す斜視図である。
【図13】ベースユニット及び第2の撮影対象固定ユニットと、ベースユニットに第2の撮影対象固定ユニットを装着した被写体保持部材とを示す斜視図である。
【図14】第2の撮影対象固定ユニットが装着された被写体保持部材に指を固定した状態を示す斜視図であり、(a)は人差し指、(b)は中指、(c)は薬指、(d)は小指を固定した状態を示す斜視図である。
【図15】ベースユニット及び第3の撮影対象固定ユニットと、ベースユニットに第3の撮影対象固定ユニットを装着した被写体保持部材とを示す斜視図である。
【図16】第3の撮影対象固定ユニットが装着された被写体保持部材に指を固定した状態を示す斜視図である。
【図17】ベースユニット及び第4の撮影対象固定ユニットと、ベースユニットに第4の撮影対象固定ユニットを装着した被写体保持部材とを示す斜視図である。
【図18】第4の撮影対象固定ユニットが装着された被写体保持部材に指を固定した状態を示す斜視図である。
【図19】ベースユニット及び第5の撮影対象固定ユニットと、ベースユニットに第5の撮影対象固定ユニットを装着した被写体保持部材とを示す斜視図である。
【図20】第5の撮影対象固定ユニットが装着された被写体保持部材に指を固定した状態を示す斜視図である。
【図21】図1に示す関節撮影装置の主要な構成を模式的に示す図である。
【図22】マルチ格子ユニットの斜視図である。
【図23】マルチ格子ユニットがX線源の下方に配置された状態を示す斜視図である。
【図24】励磁電流とマルチ格子の変位量との関係を示すグラフ図である。
【図25】マルチ格子の平面図である。
【図26】第1格子ユニット及び第2格子ユニットを基台部に取り付けた状態を示す斜視図である。
【図27】第1格子ユニットの斜視図である。
【図28】第1格子ユニットの斜視図である。
【図29】第1格子ユニットの斜視図である。
【図30】本体部の機能的構成を示すブロック図である。
【図31】タルボ干渉計の原理を説明する図である。
【図32】関節撮影装置によるX線撮影時の処理を示すフローチャートである。
【図33】コントローラによる処理を示すフローチャートである。
【図34】5ステップの撮影により得られるモアレ画像を示す図である。
【図35】各ステップのモアレ画像の注目画素のX線相対強度を示すグラフである。
【図36】図3に示す関節撮影装置の被写体台の被写体台上面板の上に被写体支持板を載置した状態を示す斜視図である。
【図37】図36に示す関節撮影装置の被写体支持板に補助台を連結した状態を示す斜視図である。
【図38】図37に示す被写体支持板及び補助台を用いて被写体の肩の関節部分の撮影を行う様子を示す斜視図である。
【図39】図37に示す被写体支持板及び補助台を用いて被写体の足首の関節部分の撮影を行う様子を示す斜視図である。
【図40】図37に示す被写体支持板及び補助台を用いて被写体の膝の関節部分の撮影を行う様子を示す斜視図である。
【図41】図37に示す被写体支持板及び補助台を用いてリクライニングした状態で被写体の膝の関節部分の撮影を行う様子を示す斜視図である。
【図42】図36に示す被写体支持板及びストレッチャーを用いて被写体の足首の関節部分の撮影を行う様子を示す斜視図である。
【図43】被写体台に屈折率調整タンクを備える構成を模式的に示す説明図である。
【発明を実施するための形態】
【0017】
以下、図面を参照しつつ、本発明に係る関節撮影装置の一実施形態について説明する。
本実施形態において、関節撮影装置は、被写体である人の手指等を撮影位置に保持する被写体台13と、この被写体台13の上方に配置され、被写体の撮影対象部分である手指等の関節部分に放射線を照射する放射線発生手段としてのX線源11、及び被写体台13の下方に配置され、関節部分を透過した放射線を検出する検出手段としてのX線検出器16を有する撮影部と、を備えている。
【0018】
図1は本実施形態に係る関節撮影装置を備えるX線画像システムを模式的に示したものであり、図2は、図1に示す関節撮影装置1を上方から見た平面図である。
X線画像システムは、関節撮影装置1とコントローラ5を備えている。関節撮影装置1はタルボ・ロー干渉計によるX線撮影を行い、コントローラ5は当該X線撮影により得られたモアレ画像を用いて被写体の再構成画像を作成する。
【0019】
関節撮影装置1は、図1に示すように、X線源11、マルチ格子12、光照射野確認ユニット6、被写体台13、第1格子14、第2格子15、X線検出器16、支柱17、本体部18、基台部19を備えている。
本実施形態における関節撮影装置1は縦型であり、X線源11、マルチ格子12、被写体台13、第1格子14、第2格子15、X線検出器16は、この順序に重力方向であるz方向に沿って配置されている(図21参照)。
なお、図1中、X線源11の焦点とマルチ格子12間の距離をd1(mm)、X線源11の焦点とX線検出器16間の距離をd2(mm)、マルチ格子12と第1格子14間の距離をd3(mm)、第1格子14と第2格子15間の距離をd4(mm)で表す。
【0020】
距離d1は好ましくは3〜500(mm)であり、さらに好ましくは4〜300(mm)である。
距離d2は、一般的に放射線科の撮影室の高さは3(m)程度又はそれ以下であることから、少なくとも3000(mm)以下であることが好ましい。なかでも、距離d2は400〜2500(mm)が好ましく、さらに好ましくは500〜2000(mm)である。
X線源11の焦点と第1格子14間の距離(d1+d3)は、好ましくは300〜5000(mm)であり、さらに好ましくは400〜1800(mm)である。
X線源11の焦点と第2格子15間の距離(d1+d3+d4)は、好ましくは400〜5000(mm)であり、さらに好ましくは500〜2000(mm)である。
それぞれの距離は、X線源11から照射されるX線の波長から、第2格子15上に第1格子14による格子像(自己像)が重なる最適な距離を算出し、設定すればよい。
【0021】
図3は、図1及び図2に示す関節撮影装置1の構成を具体的に示した斜視図であり、図4は、関節撮影装置1の各構成部を分離した状態を示す斜視図である。
図3及び図4に示すように、本実施形態における関節撮影装置1は、X線源11を支持する支柱17と、マルチ格子12を含むマルチ格子ユニット120、第1格子14を含む第1格子ユニット140、第2格子15を含む第2格子ユニット150及びX線検出器16が取り付けられている基台部19と、被写体台13(図4においては、被写体台13を構成する被写体台基台部130のみを示している。)とに大きく分離することができる。なお、本実施形態では、X線源11を支持する支柱17と、X線検出器16が取り付けられている基台部19とにより撮影部が構成されている。この撮影部と被写体台13とを分離できることにより、撮影前或いは撮影中に、患者から被写体台13に加えられた衝撃等が撮影部に影響を及ぼすことを防止することができる。
【0022】
本実施形態において、基台部19には、マルチ格子ユニット120を覆うように設けられた第1のカバーユニット21、及び第1格子ユニット140、第2格子ユニット150を覆うように設けられた第2のカバーユニット22が取り付けられている。
マルチ格子12、第1格子14及び第2格子15は、後述するように非常に高い精度での位置調整が必要な部材であり、被写体の撮影及びそのキャリブレーションを行うための被写体なしでの撮影等、複数回に亘って一連の撮影を行う場合、その間、同じ条件が保たれていることが望ましい。
しかし、マルチ格子12、第1格子14及び第2格子15の周囲に何らカバー等を設けないで雰囲気に曝した状態では、設置された撮影室内における雰囲気温度の変化(例えばエアコンによる気流変化で天井付近と床面付近とで生じる温度差)や衝撃、振動等の影響を受けやすく、これにより、複数回に亘る一連の撮影を行う間に、マルチ格子12、第1格子14及び第2格子15の位置や向きが、適正状態から僅かずつずれることがありうる。第1のカバーユニット21及び第2のカバーユニット22は、マルチ格子12、第1格子14及び第2格子15が外部からの影響を受けるのを避けて、例えば、エアコンの冷気流、或いは、暖気流等に直接的に曝され、部分的に熱膨張変動する等を抑制し、一連の撮影の間、撮影条件を維持するとともに、精密部材であるマルチ格子12、第1格子14及び第2格子15が外部からの衝撃等を受けることを防止するためのものである。
【0023】
図5は、マルチ格子ユニット120及び光照射野確認ユニット6の周囲に設けられている第1のカバーユニット21を分解した状態を示す斜視図である。
図5に示すように、第1のカバーユニット21は、マルチ格子ユニット120及び光照射野確認ユニット6を前面側から覆うように配置される前面カバー部材211と、この前面カバー部材211よりも関節撮影装置1の奥側(すなわち、支柱17側)に配置され、マルチ格子ユニット120の上方を覆う上部カバー部材212と、マルチ格子ユニット120及び光照射野確認ユニット6の下方であって上部カバー部材212に対応する位置に配置される下部カバー部材213とを備えている。第1のカバーユニット21を構成する前面カバー部材211、上部カバー部材212、下部カバー部材213は、例えば金属板をプレス加工等することにより形成される。
前面カバー部材211及び上部カバー部材212の上面であって、X線源11に対向する部分には切り欠き部211a、212aが形成されている。また、前面カバー部材211の下面であって、X線源11のX線照射口に対向する部分には開口部211bが設けられている。これにより、第1のカバーユニット21を取り付けた状態でも、X線源11からのX線照射が第1のカバーユニット21によって妨げられないようになっている。
また、前面カバー部材211において支柱17に対向する面には、後述する光照射野確認ユニット6の移動用レバー67に対応する位置に、レバー用開口部211cが形成されている。レバー用開口部211cは、移動用レバー67の移動範囲とほぼ同じ長さとなるようにx方向に延在する長孔であり、移動用レバー67の先端部はこのレバー用開口部211cから前面カバー部材211の外に突出するようになっている。これにより、ユーザは第1のカバーユニット21を取り付けた状態でも光照射野確認ユニット6の移動用レバー67を操作することができる。なお、レバー用開口部211cの周囲や近傍等に移動用レバー67の位置によって光照射野確認部本体65が光照射野確認位置又は退避位置(後述)のいずれにあるかを示す目盛や指標等を設けてもよい。
第1のカバーユニット21を取り付ける際は、上部カバー部材212をマルチ格子ユニット120の上方を覆うように基台部19にねじ止め固定し、下部カバー部材213をマルチ格子ユニット120の下方から上部カバー部材212の下端部に当接するように位置を合わせて基台部19にねじ止め固定する。さらに前面カバー部材211をマルチ格子ユニット120の前面側から上部カバー部材212及び下部カバー部材213と嵌め合わせて、それぞれねじ止め固定する。
なお、第1のカバーユニット21は、マルチ格子ユニット120に対する外部からの影響を遮断できるものであればよく、その材料や形状、構成、固定手法等はここに例示したものに限定されない。また、当該第1のカバーユニット21の少なくとも内面側には断熱部材が設けられていることが好ましい。
【0024】
図6は、第1格子ユニット140、第2格子ユニット150の周囲に設けられている第2のカバーユニット22を分解した状態を示す斜視図である。
図6に示すように、第2のカバーユニット22は、第1格子ユニット140、第2格子ユニット150を前面側から覆うように配置される前面カバー部材221と、第1格子ユニット140の上方を覆う上部カバー部材222と、第1格子ユニット140、第2格子ユニット150の両側部に配置される側面カバー部材223とを備えている。第2のカバーユニットを構成する前面カバー部材221、上部カバー部材222、側面カバー部材223は、例えば金属板をプレス加工等することにより形成される。
上部カバー部材222は、中央部が切り欠かれた上面視コ字状の部材であり、被写体台13に載置される被写体、第1格子14及び第2格子15の上を上部カバー部材222の上面が覆わないようになっている。
第2のカバーユニット22を取り付ける際は、側面カバー部材223を第1格子ユニット140及び第2格子ユニット150の両側部を覆うように基台部19をにそれぞれ固定し、前面カバー部材221を第1格子ユニット140及び第2格子ユニット150を前面側から覆うように位置を合わせて側面カバー部材223の前面側端部にねじ止め固定する。さらに、上方から上部カバー部材222を被せて、基台部19、側面カバー部材223及び前面カバー部材221とそれぞれねじ止め固定する。
なお、第2のカバーユニット22は、第1格子ユニット140、第2格子ユニット150に対する外部からの影響を遮断できるものであればよく、その材料や形状、構成、固定手法等はここに例示したものに限定されない。また、当該第2のカバーユニット22の少なくとも内面側には断熱部材が設けられていることが好ましい。
【0025】
また、第2のカバーユニット22の周囲は、被写体である手等を被写体台13に載置している患者の足等がぶつかる等により外部からの衝撃を受けやすい。このため、第2のカバーユニット22の外側には、例えば、図3及び図5に示すようなガード部材41が設けられている。ガード部材41は、例えば金属板等で形成され、図5に示すように、第2のカバーユニットの周囲にねじ止め等により着脱可能に固定される。なお、ガード部材41の形状、第2のカバーユニット等への固定方法等は、ここに例示したものに限定されない。さらに、ガード部材41の内側に衝撃吸収用の弾性部材等を設けてもよい。
このようなガード部材41を設けることにより、撮影時に患者の足等が装置側に当たっても、その衝撃が第1格子14や第2格子15等の精密部材に影響を与えることを防止することができ、精度の高い画像撮影を行うことができる。
【0026】
被写体台13は、撮影時に被写体となる患者の手指等を載置するものである。被写体台13の大きさは特に限定されないが、図1に示すように、撮影時に被写体となる患者の手指等をX線照射範囲内(撮影可能領域内)に置いた際に、患者の肘部分まで載置できる程度の長さ寸法を有し、腕レスト部を構成することが好ましい。手指から肘部分までを被写体台13に載置することにより、撮影対象である手指の位置及び姿勢を安定させることができ、撮影時の手ぶれ等を防ぐことができる。
【0027】
図3及び図4に示すように、本実施形態では、被写体台13は、キャスタ131を備える脚部132を有する被写体台基台部130を備え、支柱17や基台部19から独立している。脚部132は、支柱17と基台部19との間に配置されるようになっており、基台部19側の脚部132には、キャスタ131をロックするロック機構133が設けられている。
なお、被写体台13の構成はここに例示したものに限定されない。例えば被写体台基台部130の全ての脚部132にロック機構133を設けてもよいし、ロック機構133を設けず、支柱17又は基台部19の一端に被写体台13が固定されるようにしてもよい。なお、被写体台13は、支柱17又は基台部19に接触した際に衝撃を吸収することのできる衝撃吸収部材(図示せず)を備えていることが好ましい。
【0028】
また、本実施形態において、被写体台基台部130の手前側の脚部132の間には、X線検出器保持部25が着脱可能に取り付けられる部材係止用支柱132aがほぼ水平に固定されている。
X線検出器保持部25は、X線検出器16のゲイン等のキャリブレーション時にX線検出器16を保持するものであり、図7及び図8に示すように、X線検出器保持部25の一端側には鉤状に形成された係止用フック251が設けられている。X線検出器保持部25は、X線検出器16のキャリブレーション時において、X線検出器16を上面に保持したまま、この係止用フック251を被写体台13の部材係止用支柱132aに係止することにより被写体台13に固定される。
【0029】
本実施形態では、後述するように、X線源11のX線照射方向を変えることができるようになっており、X線検出器16のキャリブレーション時には、X線の光軸がマルチ格子12、第1格子14及び第2格子15の上から外れる状態(キャリブレーション状態 図8参照)まで、X線源11の向きが調整される。X線検出器保持部25は、被写体台13に取り付けられた状態において、X線源11のX線照射方向がキャリブレーション状態に調整された際のX線源11の光軸の延長線上に配置されるようになっており、X線検出器保持部25の上にX線検出器16を保持してX線源11からX線を照射し、撮影を行うことにより、マルチ格子12、第1格子14及び第2格子15の画像が映りこんでいないキャリブレーション用の画像を取得することができる。
【0030】
被写体台13の上面であって、第2のカバーユニット22の上部カバー部材222の上には、樹脂あるいは金属等により形成され、被写体を保持する被写体台上面板3が図示しない固定用ピンによりピン止め固定されている。上部カバー部材222には被写体台上面板3の固定用ピンに対応する位置に貫通孔が形成されており、被写体台上面板3は、第2のカバーユニット22を基台部19に取り付けた後に上部カバー部材222の上から被写体台基台部130に固定される。
被写体台上面板3は、例えば固定用ピンの高さ方向の固定位置を複数段階に調整することにより、被写体を保持する高さを調製することができるようになっていることが好ましい。これにより、被写体台上面板3の固定用ピンの固定位置を調整することで被写体台13の上に保持される被写体とX線源11との距離を撮影に適した所定の距離に保つことができる。
【0031】
被写体台上面板3のほぼ中央部には円形の切り欠き部301が設けられており、この切り欠き部301には円形の回転板302が回転可能に装着されている。回転板302を回転させることにより、この回転板302の上に載置される被写体保持部材30(図11等参照)の向きや位置等を簡易に変更・修正することができる。これにより容易にポジショニングの修正等を行うことができる。
また、本実施形態における関節撮影装置1のように縞走査方式により関節部分の撮影を行う場合には、干渉縞が現れたモアレ画像を得るために、マルチ格子12、第1格子(第1の位相格子)14及び第2格子(第2の位相格子)15のスリットの向き・角度と被写体の向き・角度とを適切に調整する必要がある。この点、マルチ格子12、第1格子14及び第2格子15は非常に精密に構成されたものであり、これを移動、調整すると精度を保つことが難しい。この点、被写体台上面板3の被写体を載置する部分を回転可能に構成することにより、被写体側を動かすことで適宜調整を行うことができる。なお、回転板302を回転させすぎるとかえってモアレ画像を得ることができなくなる。このため、回転板302は、例えば所定の初期位置から45度等、一定の範囲内で回転可能に構成してもよい。
被写体台上面板3の上であって回転板302の周縁部近傍には、回転板302を固定する回転板固定用ピン303が設けられており、回転板302を固定可能となっている。
【0032】
この回転板302のほぼ中央部であって第1格子14及び第2格子15に対応する位置には、ほぼ円形の切り欠き部304が設けられており、X線源11からのX線照射を妨げないようになっている。
図9及び図10に示すように、この切り欠き部304には、透明なアクリルやガラス等の透明材料で形成されたほぼ円形の透明板部材305が装着されている。
図10に示すように、この透明板部材305は、その上面が回転板302の上面よりも僅かに低い位置となるように配置されている(本実施形態では図10に示す高低差Gだけ透明板部材305の上面が回転板302の上面よりも低くなっている。)。これにより、被写体台上面板3の回転板302の上面に後述する被写体保持部材30等が載置、固定された場合に、透明板部材305の表面に被写体保持部材30等が接触するのを避けることができ、透明板部材305の表面が傷等の損傷を受けることを防いで耐久性を向上させることができる。
【0033】
図9に示すように、被写体台上面板3の回転板302の上であって透明板部材305を挟むほぼ対称位置には、互いにほぼ平行に形成された長孔306が設けられており、この長孔306には、それぞれ図11等に示す被写体保持部材30を固定するための保持部材固定用ピン307が設けられている。
【0034】
被写体台上面板3の上には、被写体保持部材30が着脱自在に載置されるようになっている。本実施形態では、同一箇所について複数回撮影が行われるが、被写体保持部材30は、その一連の撮影の間、被写体である手指が動いたりずれたりしないように手指の位置を保持・固定するためのものである。
図11及び図13から図20に示すように、本実施形態において、被写体保持部材30は、ベースユニット31と、このベースユニット31に対して着脱自在に構成され被写体である人の手指を支持するための撮影対象固定ユニット33(第1の撮影対象固定ユニット33a〜第5の撮影対象固定ユニット33e)とで構成されている。なお、以下の実施形態においては、左手用の被写体保持部材30のみを図示しているが、右手の手指を撮影する際には、同様の構成の右手用の被写体保持部材30を用いる。
ベースユニット31及び撮影対象固定ユニット33は、例えばポリアセタール樹脂(POM:polyacetal, polyoxymethylene)等で形成されている。なお、ベースユニット31及び撮影対象固定ユニット33を形成する材料はポリアセタール樹脂に限定されず、各種樹脂等を用いることができる。また、ベースユニット31及び撮影対象固定ユニット33のうち、被写体を被写体保持部材30に保持した際に撮影対象である手指の関節部分と重なり合わない部分は金属等で形成されていてもよい。また、手指が直接接触する部分等にはシリコン樹脂等の弾性を有する材料で形成された緩衝部材が配置されることが好ましい。また、ベースユニット31及び撮影対象固定ユニット33は、撮影する患者が代わるごとに消毒を行うことが衛生上好ましく、ベースユニット31及び撮影対象固定ユニット33を形成する材料は、消毒に用いられるアルコール等に対して耐性を有するものであることが好ましい。
【0035】
ベースユニット31は、ほぼ中央に撮影対象固定ユニット33(第1の撮影対象固定ユニット33a〜第5の撮影対象固定ユニット33e)を装着する撮影対象固定ユニット装着部311を備え、撮影対象固定ユニット33を着脱することが可能に構成された枠状の部材である。
ベースユニット31において被写体台上面板3の回転板302に設けられている2つの保持部材固定用ピン307に対応する位置には、それぞれ長孔306の延在方向にほぼ直交する向きに延在して形成された長孔312が設けられている。
図12に示すように、保持部材固定用ピン307は、ベースユニット31の長孔312と回転板302の長孔306とを貫通して、被写体保持部材30を被写体台上面板3の回転板302に係止するようになっており、被写体保持部材30は、長孔306及び長孔312の位置を調整することによって被写体台上面板3上の向きや位置を微調整された上で保持部材固定用ピン307によって固定されるようになっている。
撮影対象固定ユニット装着部311の一端側近傍であって、撮影対象固定ユニット33に支持される手の手首側となる位置には、被写体の手首部分を固定するための手首固定用ベルト313が設けられている。
【0036】
また、撮影対象固定ユニット装着部311の他端側近傍であって、撮影対象固定ユニット33に支持される手の指先側となる位置には、撮影対象固定ユニット33を撮影対象固定ユニット装着部311に固定するためのベース側固定部314となっている。ベース側固定部314には、撮影対象固定ユニット33を撮影対象固定ユニット装着部311に装着した後、固定用ピン333を挿通させる孔部316が形成されている。
また、ベースユニット31におけるベース側固定部314近傍であって後述する撮影対象固定ユニット33側の固定部(固定ユニット側固定部331)の側面に設けられている孔部334に対応する位置には、ベースユニット31の側端面から撮影対象固定ユニット装着部311内側までベースユニット31における水平方向(被写体保持部材30を被写体台上面板3に上に載置した際の水平方向)に貫通する貫通孔317が形成されている。この貫通孔317には微調整用ねじ318がベースユニット31の側端面から撮影対象固定ユニット装着部311内側に向かって挿通されている。
さらに、ベースユニット31には、ベースユニット31の表面から貫通孔317に向かって垂直方向に孔部319が形成されている。孔部319には微調整用ねじ318を固定するための調整固定用ねじ320がベースユニット31の表面から貫通孔317に向かって挿通されている。
なお、ベースユニット31の形状、構成、ベースユニット31を被写体台上面板3に固定するための構成等はここに例示したものに限定されず、適宜変更可能である。
【0037】
撮影対象固定ユニット33は、撮影対象部分である手指の関節部分を放射線発生手段であるX線源11からのX線(放射線)照射方向に対して所定の位置に固定するものである。
本実施形態においては、ベースユニット31に装着可能な撮影対象固定ユニット33として、図11及び図13から図20に示すように、5種類の撮影対象固定ユニット33a〜33eが用意されている。なお、以下において単に撮影対象固定ユニット33としたときはこれら全て(撮影対象固定ユニット33a〜33e)を含むものとする。
撮影においては、撮影したい部位や患者の手指の関節の変形の状況等に応じて撮影に適した撮影対象固定ユニット33を選択し、ベースユニット31に装着する。なお、ベースユニット31に装着可能な撮影対象固定ユニット33は、ここに例示したものに限定されない。さらに多くの種類が用意されていてもよいし、ここに挙げたもののうち一部のみを備えるものであってもよい。
【0038】
第1の撮影対象固定ユニット33aは、図11に示すように、ベースユニット31に固定するための固定ユニット側固定部331と、4つの指間保持部材332とを備えている。
固定ユニット側固定部331は、ベースユニット31の孔部316に対応する位置に固定用ピン333が設けられており、この固定用ピン333を固定ユニット側固定部331からベースユニット31のベース側固定部314の孔部316まで挿通させて締めることにより第1の撮影対象固定ユニット33aをベースユニット31に仮固定することができる。
固定ユニット側固定部331の側面であってベースユニット31の貫通孔317に対応する位置には、貫通孔317に挿通された微調整用ねじ318の先端部が挿入される孔部334が設けられている。
ベースユニット31の貫通孔317に微調整用ねじ318を挿通し、その先端部を孔部334に挿入して適宜奥側に押し込むことにより、第1の撮影対象固定ユニット33aの幅方向(撮影対象固定ユニット33に固定される手指の幅方向)の位置を微調整することができる。幅方向の位置を調整後、調整固定用ねじ320によってベースユニット31の表面から微調整用ねじ318を固定することにより、第1の撮影対象固定ユニット33aをベースユニット31に固定することができる。
【0039】
指間保持部材332は、一端が固定ユニット側固定部331に固定されており、被写体保持部材30に被写体の手指を固定した際に、各指間保持部材332が被写体の手指の5指の間にそれぞれ位置するように並んで配置されている。指間保持部材332は、自由端側から固定ユニット側固定部331に固定されている固定端側に向かって徐々に幅が広くなるテーパ状に形成されており、被写体の手指の先端が十分に開いた状態で固定できるようになっている。
図12は、ベースユニット31に固定された第1の撮影対象固定ユニット33aを被写体台上面板3の上に固定し、この第1の撮影対象固定ユニット33aにユーザが手指を固定した状態を示した図である。例えば、指の第2関節(PIP関節)部分等を撮影したい場合に、図12に示すように4つの指間保持部材332がそれぞれ手指の5指の間に位置するように手指を第1の撮影対象固定ユニット33aに載置することにより、5指をそれぞれ間隔を開けた状態で支持することができる。
なお、第1の撮影対象固定ユニット33aの形状、構成、第1の撮影対象固定ユニット33aをベースユニット31に固定するための構成等はここに例示したものに限定されず、適宜変更可能である。例えば、指間保持部材332が固定ユニット側固定部331に対して容易に着脱可能に構成されるとともに、形状や大きさの異なる指間保持部材332が複数用意され、患者の手の大きさ等に応じて、適宜適切なものを選択して装着するようにしてもよい。
【0040】
第2の撮影対象固定ユニット33bは、図13及び図14(a)〜(d)に示すように、ベースユニット31に固定するための固定ユニット側固定部331と、撮影対象となる手指以外の指を支持させるための握持部335と、撮影対象となる手指を1本ずつ保持する4つの指保持部材338と、この指保持部材338を支持する支持部材336と、を備えている。
固定ユニット側固定部331の構成は、第1の撮影対象固定ユニット33aと同様であることからその説明を省略する。
握持部335は、被写体保持部材30を被写体台上面板3に固定した際の水平面(被写体台上面板3と水平となる面)に対してほぼ垂直に立設された円筒状の部材である。握持部335は、手で軽く握りやすい程度の大きさ・形状に形成されている。握持部335には、患者が握りやすいように表面に滑り止め用の樹脂を塗布したり布等を貼付したりしてもよい。また、手置き部349の表面に指に沿う溝を形成してもよい。
支持部材336は、握持部335の近傍にほぼ垂直に立設されている板状の部材である。支持部材336には、4つの指保持部材338にそれぞれ対応する4つのレール部337が、被写体保持部材30に手指を固定した際の手指の延在方向に沿って形成されている。
4つの指保持部材338は、撮影対象となる指の指先を載置できるように構成された鞘状の部材であり、支持部材336の4つのレール部337にそれぞれスライド移動可能に係止されている。指保持部材338は、指先を載置する際にレール部337に沿ってスライド移動し、各指の長さに応じた位置で指を固定するようになっている。
【0041】
本実施形態では、人差し指の関節部分を撮影する場合には、図14(a)に示すように人差し指以外の手で握持部335を握って手を安定させ、人差し指を支持部材336に沿って伸ばして一番上に位置する指保持部材338に指先を載置する。また、中指の関節部分を撮影する場合には、図14(b)に示すように中指以外の手で握持部335を握って手を安定させ、中指を支持部材336に沿って伸ばして上から二番目に位置する指保持部材338に指先を載置する。また、薬指の関節部分を撮影する場合には、図14(c)に示すように薬指以外の手で握持部335を握って手を安定させ、薬指を支持部材336に沿って伸ばして上から三番目に位置する指保持部材338に指先を載置する。また、小指の関節部分を撮影する場合には、図14(d)に示すように小指以外の手で握持部335を握って手を安定させ、小指を支持部材336に沿って伸ばして一番下に位置する指保持部材338に指先を載置する。
例えば、指の第2関節(PIP関節)部分等を撮影したい場合には、第2の撮影対象固定ユニット33bをベースユニット31に固定した被写体保持部材30を被写体台上面板3の上に固定し、撮影対象となる手指を1本ずつ第2の撮影対象固定ユニット33bの指保持部材338に載置することにより指を1本ずつ伸ばした状態で支持することができる。
なお、第2の撮影対象固定ユニット33bの形状、構成等はここに例示したものに限定されず、適宜変更可能である。指の第2関節(PIP関節)部分等を撮影する場合、多少指が手の甲の側に反っている状態の方が好ましいため、例えば支持部材336を外側(すなわち握持部335から離れる方向)にカーブした形状とし、指保持部材338をその端部近傍に設けるようにしてもよい。また、握持部335を有することは必須ではなく、指を1本ずつ位置決めすることが可能な仕切り板等を設けて、指を1本ずつ手の甲の側に反った状態で保持できる構成としてもよい。
【0042】
第3の撮影対象固定ユニット33cは、図15及び図16に示すように、ベースユニット31に固定するための固定ユニット側固定部331と、撮影対象となる手指の指先に上方向の傾斜をつけるための段差部340と、親指と親指以外の手指との間の間隙が大きくなるように手指の位置や角度を規制する指位置規制部材341と、を備えている。
固定ユニット側固定部331の構成は、第1の撮影対象固定ユニット33aと同様であることからその説明を省略する。
段差部340は、固定ユニット側固定部331と一体となっており、固定ユニット側固定部331の一端から張り出した張出し部で構成されている。段差部340は、掌部分が載置される被写体台上面板3よりも例えば10mm〜15mm程度高くなっているため、撮影対象となる人差し指から小指までの手指の指先を段差部340の上に乗せることによって、指先を上方向に反らせることができる。なお、段差部340の形状や高さ等はここに例示したものに限定されない。例えば、段差部340を固定ユニット側固定部331よりもさらに高くして指先をより高く反らせることができるようにしてもよい。また、段差部340は、指先側に行くほど高さが高くなるように傾斜をつけてもよい。
指位置規制部材341は、一端が固定ユニット側固定部331に固定されており、被写体保持部材30に被写体の手指を固定した際に、親指と人差し指との間に位置するようになっている。指位置規制部材341は、自由端側から固定ユニット側固定部331に固定されている固定端側に向かって徐々に幅が広くなるテーパ状に形成されており、被写体の親指と親指以外の手指(人差し指から小指)との間が大きく開くように親指以外の手指(人差し指から小指)を親指から離れる方向に規制するようになっている。なお、指位置規制部材341の形状・大きさ等は、特に限定されないが、例えば、親指と親指以外の手指との間がほぼ90度近くまで開く程度に大きく固定端側が開いた形状であることが好ましい。また、ユーザの手の大きさや指の形状、撮影したい部位等に応じて形状や大きさの異なる複数種類の指位置規制部材341を用意しておき、状況に応じて最も適するものを付け替えて使用する構成としてもよい。
このように、本実施形態では、第3の撮影対象固定ユニット33cをベースユニット31に固定した被写体保持部材30を被写体台上面板3の上に固定し、被写体である手指を被写体保持部材30に固定すると、撮影対象となる人差し指から小指までの手指の指先が段差部340によって上側に押し上げられ、さらに指位置規制部材341によって親指から離れる方向に規制される。このため、例えば親指の付け根の関節部分等を撮影する際に、親指とそれ以外の指との間が大きく開いて、親指を横になった状態で固定することができる。
なお、第3の撮影対象固定ユニット33cの形状、構成等はここに例示したものに限定されず、適宜変更可能である。
【0043】
第4の撮影対象固定ユニット33dは、図17及び図18に示すように、ベースユニット31に固定するための固定ユニット側固定部331と、撮影対象となる手指を1本ずつ保持する4つの指保持部材345と、この指保持部材345を手指の延在方向に沿ってガイドするガイド部材343と、を備えている。
固定ユニット側固定部331の構成は、第1の撮影対象固定ユニット33aと同様であることからその説明を省略する。
ガイド部材343は、一端が固定ユニット側固定部331に固定されており、各ガイド部材343にはそれぞれ指保持部材345が手指の延在方向に沿ってスライド移動可能に取り付けられている。
指保持部材345において、指先を載置する部分は指の先端側に行くほど高さが高くなるように上側に傾斜している傾斜面となっている。これにより、手指を指保持部材345に載置すると、指先が傾斜面により押し上げられて上側に反った状態で固定される。
指保持部材345は、指先を載置する際にガイド部材343に沿ってスライド移動し、図18に示すように、各指の長さに応じた位置で指を固定するようになっている。
なお、第4の撮影対象固定ユニット33dの形状、構成等はここに例示したものに限定されない。
【0044】
第5の撮影対象固定ユニット33eは、図19及び図20に示すように、ベースユニット31に固定するための固定ユニット側固定部348と、撮影対象となる手指を載せることができる手置き部349と、を備えている。
固定ユニット側固定部348は、一端が手置き部349に固定され、棒状に形成されている。固定ユニット側固定部348の自由端側の端部には、第5の撮影対象固定ユニット33eをベースユニット31に固定するための固定用ねじ348が設けられている。ベースユニット31において、手首固定用ベルト313の近傍には、図示しない孔部が形成されており、第5の撮影対象固定ユニット33eは、固定用ねじ348によりベースユニット31側のこの孔部にねじ止めされることによりベースユニット31に固定される。
手置き部349は、半球形状の部材であり、図20に示すように、撮影対象である手指を軽く曲げた状態で手置き部349上に載置することで指を固定するようになっている。これにより、リウマチ等の発症により関節部分を伸ばすことができない状態にある場合や、湯部を多少曲げた状態で撮影を行った方が好ましい場合等において、比較的楽な姿勢で患者に負担をかけることなく、指の位置や角度を安定させることができ、撮影中の手指のずれや揺れ等を抑えることができる。
なお、第5の撮影対象固定ユニット33eの形状、構成等はここに例示したものに限定されない。例えば、手置き部349の表面に患者が握りやすいように滑り止め用の樹脂を塗布する等してもよい。また、手置き部349の表面に指に沿う溝を形成してもよい。また、第5の撮影対象固定ユニット33eとして、固定ユニット側固定部348の長さや、手置き部349の大きさ、形状、高さ等が異なるものを複数用意しておき、患者の手の形や大きさ等に合ったものを撮影に用いるようにしてもよい。
【0045】
図21は、本実施形態における関節撮影装置1の要部構成を模式的に示したものである。
本実施形態において関節撮影装置1は、X線源11、マルチ格子12、光照射野確認部本体65、被写体台13の被写体保持部材30、第1格子14、第2格子15、X線検出器16が、この順序に重力方向であるz方向(図1参照)に沿って配置されている。
【0046】
X線源11には、ほぼコ字状に形成された固定用部材111が取付用アーム112を介して取り付けられている。本実施形態において、支柱17は、四角柱形状となっており、固定用部材111は、支柱17を側面から挟み込むようにして支柱17に取り付けられ、固定されている。
取付用アーム112の一部には緩衝部材17a(図1参照)が設けられており、X線源11は、この緩衝部材17aを介して保持されている。緩衝部材17aは、衝撃や振動を吸収できる材料であれば何れの材料を用いてもよいが、例えばエラストマー等が挙げられる。X線源11はX線の照射によって発熱するため、X線源11側の緩衝部材17aは衝撃や振動を吸収できる材料であることに加えて断熱材料であることが好ましい。
【0047】
X線源11はX線管を備え、当該X線管によりX線を発生させて重力方向(z方向)にX線を照射する。X線管としては、例えば医療現場で広く一般に用いられているクーリッジX線管や回転陽極X線管を用いることができる。陽極としては、タングステンやモリブデンを用いることができる。
X線の焦点径は、0.03〜3(mm)が好ましく、さらに好ましくは0.1〜1(mm)である。
【0048】
また、本実施形態では、X線源11は、図5及び図6等に示すように、取付用アーム112の一部がほぼ90度屈曲することにより、平行度及び相対距離を調整されたマルチ格子12、第1格子14、第2格子15のスリットの方向に対してX線源11の取付方向がほぼ90度回転可能に構成されている。
本実施形態において、X線源11のX線管の焦点形状は完全な円形ではなく、僅かに楕円形状となっており、後述するモアレ画像を取得する際の撮影では、X線管の向きを変えることによって適切なモアレ画像を得ることができる場合がある。このため、X線源11をほぼ90度回転させることにより、X線管の焦点形状に由来する不具合を解消することができる。
なお、X線源11を、マルチ格子12、第1格子14及び第2格子15のスリット方向に対する取付方向を変更可能とする構成はここに例示したものに限定されない。例えば、固定用部材111の取付位置を変えることによりX線源11の取付方向を変更可能としてもよい。また、X線源11の取付方向の変更は90度だけでなく、さらに細かく角度設定が可能となるように構成してもよい。
【0049】
さらに、本実施形態では、X線源11は、図8に示すように、取付用アーム112におけるX線源11固定側の端部が回動可能となっており、X線源11から照射されるX線の光軸が支柱17とほぼ平行でX線がマルチ格子12、第1格子14及び第2格子15の上に照射される状態(撮影状態 図7参照)から、X線の光軸がマルチ格子12、第1格子14及び第2格子15の上から外れる状態(キャリブレーション状態 図8参照)まで、X線源11のX線照射方向を変えることができるようになっている。
なお、キャリブレーション時のX線源11のX線照射方向は、X線の光軸がマルチ格子12、第1格子14及び第2格子15の上から外れる状態となる方向であればよく、ここに例示したものに限定されない。キャリブレーション時のX線源11のX線照射方向が他の方向である場合には、X線検出器保持部25がX線源11の光軸の延長線上に配置されるように、その取り付け位置が調整される。
【0050】
また、X線源11の直下であって、後述するマルチ格子12の下方には、照射野絞り113とフィルタ114が設けられている。
照射野絞り113は、X線源11から照射されるX線の照射野を所定の範囲に絞るものである。
フィルタ114は、X線源11から照射される光線の中から不要な波長の光線を分離するものであり、例えばAL付加フィルタ等が適用される。
【0051】
光照射野確認ユニット6は、図3、図5等に示すように、基台部19に取り付けられるほぼL字状の基台取付部61とこの基台取付部61の上に載置される光照射野確認部本体65とを備えている。基台取付部61は、図示しないねじ等により基台部19に固定されている。
基台取付部61における床面に対してほぼ水平に配置されている面には、光照射野確認部本体65をx方向に移動させるためのガイド63が設けられており、光照射野確認部本体65は、このガイド63に沿って手動又は自動で移動可能となっている。
光照射野確認ユニット6は、X線源11から照射されるX線の照射野を予め確認するためにX線の照射野と同じ領域を可視光で照らすものであり、光照射野確認部本体65には、可視光線を照射可能な図示しない光源等が設けられている。
また、光照射野確認部本体65には、関節撮影装置1の奥側(すなわち、支柱17側)から手前側に床面に対してほぼ水平に突出する移動用レバー67が設けられている。移動用レバー67は、光照射野確認部本体65を手動にてガイド63に沿ってx方向に移動させるためのレバーであり、前述のように、関節撮影装置1に第1のカバーユニット21が取り付けられた状態において、その先端部がレバー用開口部211cから前面カバー部材211の外に突出するようになっている。
【0052】
本実施形態において、光照射野確認部本体65は、その光源から照射される光の光軸がX線源11から照射されるX線の光軸と一致して光照射野の確認を行うことができる光照射野確認位置と、X線源11から照射されるX線を妨げない退避位置とを取り得るようになっている。撮影を行う際等、通常の使用時には、光照射野確認部本体65は退避位置(図21において実線で示す位置)に位置し、撮影の妨げにならないようになっている。そして、光照射野の確認を行う際には、ユーザは適宜移動用レバー67を操作することにより、光照射野確認部本体65の光源から照射される光の光軸がX線源11から照射されるX線の光軸と一致する光照射野確認位置(図21において破線で示す位置)まで光照射野確認部本体65の位置を移動させる。なお、光照射野確認部本体65は、モータ等により自動でx方向に移動するように構成してもよい。
なお、本実施形態では、光照射野確認部本体65と第1格子14及び第2格子15との光を遮るものが存在しないため、光照射野の確認を正確に行うことができる。
【0053】
マルチ格子ユニット120、第1格子ユニット140、第2格子ユニット150及びX線検出器16は、同一の基台部19の上に保持され、z方向における位置関係が固定されている。マルチ格子ユニット120、第1格子ユニット140、第2格子ユニット150は、重力方向(z方向)と直交する方向に延展せしめられており、ねじ等により、それぞれ基台部19に対して着脱自在に取り付けられている。
また、光照射野確認ユニット6は、基台部19の上であってマルチ格子ユニット120の直下近傍に取り付けられている。
また、X線検出器16は、基台部19に設けられている検出器支持台191の上に、緩衝部材192を介して載置されている。
なお、基台部19は支柱17に対してz方向に移動可能に構成されていてもよい。
【0054】
図22は、マルチ格子ユニット120の斜視図である。
図22に示すように、マルチ格子ユニット120は、基台部19に取り付けられるほぼL字状の基台取付部121とこの基台取付部121の上に載置されるマルチ格子ユニット本体122を備えている。
この基台取付部121における床面に対してほぼ水平に配置されている面には、マルチ格子ユニット本体122をx方向に移動させるためのリニアガイド123が設けられている。
基台取付部121は、基台部19への取り付け位置を調整することにより、マルチ格子12と、第1格子14や第2格子15との間における相対距離を調整可能とするものである。また、マルチ格子ユニット本体122には、相対距離微調整機構部127が設けられている。相対距離微調整機構部127は、その重力方向(上下方向)の長さを変えることでマルチ格子12の重力方向(上下方向)の位置を調整するものである。本実施形態では、基台取付部121と相対距離微調整機構部127とにより、マルチ格子12と、第1格子14や第2格子15との間における相対距離を調整する相対距離調整機構が構成される。
なお、比較的重量物であるマルチ格子ユニットを扱う際の作業性や安全性、及び、位置調整のやり易さの両観点からは、前者と後者の機能を分離する方が好ましく、取付位置は位置決めピン等により仮固定し(調整不可)、ネジ等で基台部19に螺合(固定)する構造とし、固定終了後、作業者が両手を自由に使って、マルチ格子ユニット本体122内に設けた相対距離微調整機構部127により相対距離を微調整する構造とすることが好ましい。
【0055】
マルチ格子ユニット本体122には、マルチ格子12が支持されている他、マルチ格子12を移動させるためのマルチ格子駆動部125として、x方向移動用モータ125a、マルチ格子12をx方向に回転させるためのθx回転用モータ125b、マルチ格子12をy方向に回転させるためのθy回転用モータ125c、マルチ格子12をz方向に回転させるためのθz回転用モータ125dが設けられている。
本実施形態では、マルチ格子12は、図23に示すように、X線源11の下方からX線源11の内部に挿入されており、X線管の焦点位置のすぐ近くに配置されるようになっている。
【0056】
x方向移動用モータ125aは、通電駆動される駆動源であり、例えばパルス信号に正確に同期して動作するステッピングモータ(パルスモータ)等、高精度の動作制御を行うことのできるモータにより構成されている。x方向移動用モータ125aに適用されるステッピングモータとしては、例えば、オリエンタルモーター株式会社製の5相ステッピングモータ(型式:PX533MH-B)等の5相ステッピングモータが望ましく、5相でも高分解能タイプが好ましい。すなわち、一般的には基本ステップ角:0.72°であるが、高分解能タイプでは基本ステップ角:0.36°であり、このようなモータが好適に用いられる。更に、ステップ数を細分化できるマイクロステップによる制御を行うことが好ましい。
本実施形態では、駆動源であるx方向移動用モータ125aが駆動すると、当該駆動源の出力を被駆動部であるマルチ格子12を含むマルチ格子ユニット120の本体まで伝達する伝達系を構成する図示しないボールねじが回転し、マルチ格子12を含むマルチ格子ユニット120の本体がリニアガイド123にガイドされてx方向に移動するようになっている。
駆動源であるx方向移動用モータ125aと伝達系であるボールねじ及びリニアガイドによってマルチ格子ユニット120の移動部が構成されており、この移動部は重力方向(z方向)と直交する方向に移動する移動要素のみにより構成されている。
【0057】
また、本実施形態では、マルチ格子12を移動させる際には、x方向移動用モータ125aの出力を最大とするが、X線照射時には、マルチ格子駆動部125は、x方向移動用モータ125aへの通電電流が、当該モータの出力を最大としたときにマルチ格子12に生じる変位量の50%以下となるような電流値となるようにx方向移動用モータ125aへの通電電流値を調整するようになっている。
【0058】
マルチ格子12を移動させながら複数回の撮影を行う場合、マルチ格子12の位置を高精度に維持するために、x方向移動用モータ125aに電流をかけて励磁することによりその自己保持力で位置を固定しておく必要がある。また、マルチ格子12を移動させながら複数回の撮影を行う場合には、現時点でのマルチ格子12の位置を次の移動の際の基点としてマルチ格子12を順次移動させていくが、電源を停止させてしまうと、現時点でのマルチ格子12の位置を次の移動の際にフィードバックさせることができなくなってしまう。このため、マルチ格子12を移動させていないとき(すなわち、X線照射時)でも、所定の複数回の撮影が終了するまでは、x方向移動用モータ125aに電流をかけ続けておく必要がある。
他方で、励磁する際にx方向移動用モータ125aにかける電流の電流値が高いと、x方向移動用モータ125aが発熱するとともに、微振動を生じ、これがボールねじに伝わる等により、マルチ格子12の位置に微細な変位を生じさせてしまう。
【0059】
図24は、横軸に時間(min)をとり、縦軸にマルチ格子12の変位量(μm)と温度変化(℃)をとって、励磁電流値と、温度変化及びマルチ格子12の変位量との関係を示したグラフである。
図24において、マルチ格子12の変位量は、初期状態のマルチ格子12の位置をゼロとしたときに励磁電流値及び温度変化によってどれだけマルチ格子12が移動方向(x方向)に変位するかを測定したものである。また、温度上昇値は、各電流値の励磁電流をかけた際のx方向移動用モータ125aの温度変化を測定したものである。
図24に示すように、励磁電流値を当該モータの出力を最大としたときの90%程度とすると、時間の経過に伴ってx方向移動用モータ125aの温度が上昇するとともに、マルチ格子12の変位量も大きくなっていき、1.4μmを超える変位量となる。これに対して、励磁電流値を当該モータの出力を最大としたときの27%程度とすると、時間が経過してもx方向移動用モータ125aの温度はそれほど上昇せず、マルチ格子12の変位量も0.3μm程度に止まる。また、励磁電流値を当該モータの出力を最大としたときの50%程度とした場合でも、時間経過に伴うx方向移動用モータ125aの温度上昇はそれほど大きくなく、マルチ格子12の変位量も0.45μm程度に止まる。
【0060】
ここで、適切なモアレ画像を得るためには、x方向移動用モータ125aによるマルチ格子12の格子送り精度は、格子送り量の1/10以下である必要がある。例えば、マルチ格子12を5回移動させて5回撮影することによりモアレ画像を得る場合には、格子ピッチの1/5ずつマルチ格子12を移動させる。また、マルチ格子12を3回移動させて3回撮影することによりモアレ画像を得る場合には、格子ピッチの1/3ずつマルチ格子12を移動させることとなる。したがって、例えば、格子ピッチが22.8μmであり、その格子送り量が5.7μmである場合、要求される精度(格子相対位置)は、±0.23μm(P-P:0.46μm)となる。
本実施形態においては、励磁電流値を当該モータの出力を最大としたときの50%程度以下であれば、要求される精度(格子相対位置)を満たしており、x方向移動用モータ125aに電流をかけてもモアレ画像の生成に影響を与えないといえる。
【0061】
なお、x方向移動用モータ125aにかける励磁電流値がどの程度のときにモアレ画像の生成に影響を与えるか、すなわち、「x方向移動用モータ125aへの通電電流が、当該モータの出力を最大としたときにマルチ格子12に生じる変位量の50%以下となるような電流値」がどの程度であるかは、モータの種類によって異なる。このため、X線照射時の励磁電流値は、適用するモータに応じて適宜設定することが好ましい。
【0062】
θx回転用モータ125b、θy回転用モータ125c、θz回転用モータ125dは、例えば駆動源となるアクチュエータ等を内蔵したゴニオステージであり、マルチ格子12、第1格子14及び第2格子15相互間における平行度を調整可能とする煽り調整機構として機能するものである。
【0063】
マルチ格子ユニット120に設けられているマルチ格子12は回折格子であり、図33に示すようにx方向に複数のスリットが所定間隔で設けられている。マルチ格子12はシリコンやガラスといったX線の吸収率が低い材質の基板上に、タングステン、鉛、金といったX線の遮蔽力が大きい、つまりX線の吸収率が高い材質により形成される。例えば、フォトリソグラフィーによりレジスト層がスリット状にマスクされ、UVが照射されてスリットのパターンがレジスト層に転写される。露光によって当該パターンと同じ形状のスリット構造が得られ、電鋳法によりスリット構造間に金属が埋め込まれて、マルチ格子12が形成される。
【0064】
マルチ格子12のスリット周期は1〜60(μm)である。スリット周期は、図25に示すように隣接するスリット間の距離を1周期とする。スリットの幅(x方向の長さ)はスリット周期の1〜60(%)の長さであり、さらに好ましくは10〜40(%)である。スリットの高さ(z方向の長さ)は1〜500(μm)であり、好ましくは1〜150(μm)である。
マルチ格子12のスリット周期をw0(μm)、第1格子14のスリット周期をw1(μm)とすると、スリット周期w0は下記式により求めることができる。
w0=w1・(d3+d4)/d4
当該式を満たすようにスリット周期w0を決定することにより、マルチ格子12及び第1格子14の各スリットを通過したX線により形成される自己像が、それぞれ第2格子15上で重なり合い、いわばピントが合った状態とすることができる。
【0065】
第1格子14は、マルチ格子12と同様にx方向に複数のスリットが設けられた回折格子である。第1格子14は、マルチ格子12と同様にUVを用いたフォトリソグラフィーによって形成することもできるし、いわゆるICP法によりシリコン基板に微細細線で深掘加工を行い、シリコンのみで格子構造を形成することとしてもよい。第1格子14のスリット周期は1〜20(μm)である。スリットの幅はスリット周期の20〜70(%)であり、好ましくは35〜60(%)である。スリットの高さは1〜100(μm)である。
【0066】
第1格子14として位相型を用いる場合、スリットの高さ(z方向の長さ)はスリット周期を形成する2種の素材、つまりX線透過部とX線遮蔽部の素材による位相差(X線の位相差)がπ/8〜15×π/8となる高さとする。好ましくは、π/4〜3×π/4となる高さである。第1格子14として吸収型を用いる場合、スリットの高さはX線遮蔽部によりX線が十分吸収される高さとする。
【0067】
第1格子14が位相型である場合、第1格子14と第2格子15間の距離d4は、次の条件をほぼ満たすことが必要である。
d4=(m+(1/2))・w12/λ
なお、mは整数であり、λはX線の波長である。
【0068】
第2格子15は、マルチ格子12及び第1格子14と同様にx方向に複数のスリットが設けられた回折格子である。第2格子15もフォトリソグラフィーにより形成することができる。第2格子15のスリット周期は1〜20(μm)である。スリットの幅はスリット周期の30〜70(%)であり、好ましくは35〜60(%)である。スリットの高さは1〜100(μm)である。
【0069】
本実施例では第1格子14及び第2格子15は、それぞれの格子面がz方向に対し垂直(x−y平面内で平行)であり、第1格子のスリット配列方向と第2格子のスリット配列方向とは、x−y平面内で所定角度だけ傾けて配置されているが、両者を平行な配置としてもよい。
【0070】
第1格子14及び第2格子15は、それぞれ、ほぼ同様の構成を有する第1格子ユニット140及び第2格子ユニット150に設けられている。
図26は、基台部19における第1格子ユニット140及び第2格子ユニット150の取り付け部分を拡大した斜視図である。図26に示すように、第2格子ユニット150は、第2格子15がX線検出器16のすぐ上に位置するように配置される。また、第1格子ユニット140は、第1格子14が第2格子15の上方に位置するように配置される。
【0071】
また、図27及び図28は、第1格子ユニット140を上側から見た斜視図であり、図29は斜め上方向から見た斜視図である。なお、第2格子ユニット150は、第1格子ユニット140と同一の構成となっているため、図示及び説明を省略する。
【0072】
第1格子ユニット140は、図27から図29に示すように、基台部19に取り付けられるほぼL字状の基台取付部141と第1格子ユニット本体142とを備えている。この第1格子ユニット本体142は、基台取付部141における床面に対してほぼ水平に配置されている面に載置されている。
基台取付部141は、基台部19への取り付け位置を調整することにより、第1格子14と、第2格子15やマルチ格子12との間における相対距離を調整可能とする相対距離調整機構として機能する。
また、第1格子ユニット本体142の上側面には、第1格子14をx方向に移動させるためのリニアガイド143が設けられている。
【0073】
第1格子ユニット本体142には、支持部14aに支持された第1格子14が設けられている他、第1格子14を移動させるための第1格子駆動部145として、x方向移動用モータ145a、第1格子14をx方向に回転させるためのθx回転用モータ145bが設けられている。
【0074】
x方向移動用モータ145aは、通電駆動される駆動源であり、マルチ格子ユニット120のx方向移動用モータ125aと同様に、例えばパルス信号に正確に同期して動作するステッピングモータ(パルスモータ)等、高精度の動作制御を行うことのできるモータにより構成されている。
本実施形態では、駆動源であるx方向移動用モータ145aが駆動すると、当該駆動源の出力を被駆動部である第1格子14を支持する支持部14aまで伝達する伝達系を構成するボールねじ144が回転し、支持部14aに支持された第1格子14がリニアガイド143にガイドされてx方向に移動するようになっている。
駆動源であるx方向移動用モータ145aと伝達系であるボールねじ及びリニアガイドによって第1格子ユニット140の移動部が構成されており、この移動部は重力方向(z方向)と直交する方向に移動する移動要素のみにより構成されている。
【0075】
ここで、適切なモアレ画像を得るためには、x方向移動用モータ145aによる第1格子14の格子送り精度は、マルチ格子12の場合と同様に、格子送り量の1/10以下である必要がある。例えば、第1格子14を5回移動させて5回撮影することによりモアレ画像を得る場合には、格子ピッチの1/5ずつ第1格子14を移動させ、第1格子14を3回移動させて3回撮影することによりモアレ画像を得る場合には、格子ピッチの1/3ずつ第1格子14を移動させることとなる。したがって、例えば、格子ピッチが5.3μmであり、その格子送り量が1.33μmである場合、要求される精度(格子相対位置)は、±0.05μm(P-P:0.10μm)となる。
そして、x方向移動用モータ145aに電流をかけるとx方向移動用モータ125aの場合と同様、モータの温度が上昇し、周辺部品の熱膨張を誘発し、結果として最終的な第1格子14の精密送りが達成できず、静的な格子間のアライメント不良を生じたり、モータが微振動し、この振動が周辺部品に伝搬し、結果として第1格子14が精密送りされた位置に保持できず、動的な格子間のアライメント不良(不定)を生じてしまう。
【0076】
このため、x方向移動用モータ145aについても、x方向移動用モータ125aの場合と同様、第1格子14を移動させる際には、x方向移動用モータ145aの出力を最大とするが、X線照射時には、第1格子駆動部145は、x方向移動用モータ145aへの通電電流が、当該モータの出力を最大としたときに第1格子14に生じる変位量の50%以下となるような電流値となるようにx方向移動用モータ145aへの通電電流値を調整するようになっている。
なお、X線照射時におけるx方向移動用モータ145aへの通電電流値(励磁電流値)は、x方向移動用モータ125aの場合と同様、適用するモータに応じて適宜設定することが好ましい。
【0077】
θx回転用モータ145bは、例えば駆動源となるアクチュエータ等を内蔵したゴニオステージであり、マルチ格子12、第1格子14及び第2格子15相互間における平行度を調整可能とする煽り調整機構として機能するものである。なお、マルチ格子ユニット120の場合と同様に、煽り調整機構としてθy回転用モータ、θz回転用モータを設けてもよい。
【0078】
第2格子ユニット本体152には、支持部に支持された第2格子15が設けられている他、第2格子15を移動させるための第2格子駆動部155として、x方向移動用モータ、第2格子15をx方向に回転させるためのθx回転用モータ(いずれも図示せず)が設けられている。
なお、前記のように、X線照射時における通電電流値(励磁電流値)を調整する点等については、第2格子15の第2格子駆動部155のx方向移動用モータについても、マルチ格子ユニット120のx方向移動用モータ125a、第1格子ユニット140のx方向移動用モータ145a同様である。
【0079】
上記マルチ格子12、第1格子14、第2格子15は、例えば下記のように構成することができる。
X線源11のX線管の焦点径;300(μm)、管電圧:40(kVp)、付加フィルタ:アルミ1.6(mm)
X線源11の焦点からマルチ格子12までの距離d1:40(mm)
マルチ格子12から第1格子14までの距離d3:1110(mm)
マルチ格子12から第2格子15までの距離d3+d4:1370(mm)
マルチ格子12のサイズ:10(mm四方)、スリット周期:22.8(μm)
第1格子14のサイズ:50(mm四方)、スリット周期:4.3(μm)
第2格子15のサイズ:50(mm四方)、スリット周期:5.3(μm)
【0080】
X線検出器16は、照射されたX線に応じて電気信号を生成する変換素子が2次元状に配置され、当該変換素子により生成された電気信号を画像信号として読み取る。
X線検出器16の画素サイズは10〜300(μm)であり、さらに好ましくは50〜200(μm)である。
【0081】
X線検出器16は第2格子15に当接するように基台部19に位置を固定することが好ましい。第2格子15とX線検出器16間の距離が大きくなるほど、X線検出器16により得られるモアレ画像がボケるからである。
X線検出器16としては、FPD(Flat Panel Detector)を用いることができる。FPDには、X線をシンチレータを介して光電変換素子により電気信号に変換する間接変換型、X線を直接的に電気信号に変換する直接変換型があるが、何れを用いてもよい。
【0082】
間接変換型は、CsIやGd2O3あるいはGd2O2S等のシンチレータプレートの下に、光電変換素子がTFT(薄膜トランジスタ)とともに2次元状に配置されて各画素を構成する。X線検出器16に入射したX線がシンチレータプレートに吸収されると、シンチレータプレートが発光する。この発光した光により、各光電変換素子に電荷が蓄積され、蓄積された電荷は画像信号として読み出される。
【0083】
直接変換型は、アモルファスセレンの熱蒸着により、100〜1000(μm)の膜厚のアモルファスセレン膜がガラス上に形成され、2次元状に配置されたTFTのアレイ上にアモルファスセレン膜と電極が蒸着される。アモルファスセレン膜がX線を吸収するとき、電子正孔対の形で物質内にキャリアが遊離され、電極間の電圧信号がTFTにより読み取られる。
なお、CCD(Charge Coupled Device)、X線カメラ等の撮影手段をX線検出器16として用いてもよい。
【0084】
X線撮影時のFPDによる一連の処理を説明する。
まずFPDはリセットを行い、前回の撮影(読取)以降に残存する不要な電荷を取り除く。その後、X線の照射が開始するタイミングで電荷の蓄積が行われ、X線の照射が終了するタイミングで蓄積された電荷が画像信号として読み取られる。なお、リセットの直後や画像信号の読み取り後に、蓄積されている電荷の電圧値を検出するダーク読み取りを行い、当該電圧値を補正値としてX線照射後に蓄積された電荷の電圧値から補正値を差し引いた電圧値を画像信号として出力してもよい。これにより、画像信号に対しいわゆるオフセット補正を行うことができる。
【0085】
本体部18は、図30に示すように、制御部181、操作部182、表示部183、通信部184、記憶部185、マルチ格子駆動部125、第1格子駆動部145、第2格子駆動部155を備えて構成されている。
制御部181は、CPU(Central Processing Unit)やRAM(Random Access Memory)等から構成され、記憶部185に記憶されているプログラムとの協働により、各種処理を実行する。例えば、制御部181はコントローラ5から入力される撮影条件の設定情報に従って、X線源11からのX線照射のタイミングやX線検出器16による画像信号の読取タイミング等を制御する。
【0086】
操作部182は曝射スイッチや撮影条件等の入力操作に用いるキー群の他、表示部183のディスプレイと一体に構成されたタッチパネルを備え、これらの操作に応じた操作信号を生成して制御部181に出力する。
表示部183は制御部181の表示制御に従って、ディスプレイに操作画面や関節撮影装置1の動作状況等を表示する。
【0087】
通信部184は通信インターフェイスを備え、ネットワーク上のコントローラ5と通信する。例えば、通信部184はX線検出器16によって読み取られ、記憶部185に記憶されたモアレ画像をコントローラ5に送信する。
記憶部185は、制御部181により実行されるプログラム、プログラムの実行に必要なデータを記憶している。また、記憶部185はX線検出器16によって得られたモアレ画像を記憶する。
【0088】
マルチ格子駆動部125、第1格子駆動部145、第2格子駆動部155は、マルチ格子ユニット120、第1格子ユニット140、第2格子ユニット150の各駆動源(モータ)を動作させるものである。
【0089】
コントローラ5は、オペレータによる操作に従って関節撮影装置1の撮影動作を制御し、関節撮影装置1により得られたモアレ画像を用いて被写体の再構成画像を作成する。本実施形態では被写体の再構成画像を作成する画像処理装置としてコントローラ5を用いた例を説明するが、X線画像に様々な画像処理を施す専用の画像処理装置を関節撮影装置1と接続し、当該画像処理装置により再構成画像の作成を行うこととしてもよい。
【0090】
上記関節撮影装置1のタルボ・ロー干渉計によるX線撮影方法を説明する。
図31に示すように、X線源11から照射されたX線が第1格子14を透過すると、透過したX線がz方向に一定の間隔で像を結ぶ。この像を自己像といい、自己像が形成される現象をタルボ効果という。自己像を結ぶ位置に第2格子15が平行に配置され、当該第2格子15はその格子方向が第1格子14の格子方向と平行な位置からわずかに傾けられているので、第2格子15を透過したX線によりモアレ画像Mが得られる。X線源11と第1格子14間に被写体Hが存在すると、被写体HによってX線の位相がずれるため、図31に示すようにモアレ画像M上の干渉縞は被写体Hの辺縁を境界に乱れる(歪む)。この干渉縞の乱れ(歪み)を、モアレ画像Mを処理することによって検出し、被写体像を画像化することができる。これがタルボ干渉計の原理である。
【0091】
関節撮影装置1では、X線源11と第1格子14との間のX線源11に近い位置に、マルチ格子12が配置され、タルボ・ロー干渉計によるX線撮影が行われる。タルボ干渉計はX線源11が理想的な点線源であることを前提としているが、実際の撮影にはある程度焦点径が大きい焦点が用いられるため、マルチ格子12によってあたかも点線源が複数連なってX線が照射されているかのように多光源化する。これがタルボ・ロー干渉計によるX線撮影法であり、焦点径がある程度大きい場合にも、タルボ干渉計と同様のタルボ効果を得ることができる。
【0092】
従来のタルボ・ロー干渉計では、マルチ格子12は上述のように多光源化と照射線量の増大を目的に用いられ、縞走査法によりモアレ画像を得るため、第1格子14又は第2格子15を相対移動させていた。しかし、本実施形態では、第1格子14又は第2格子15を相対移動させるのではなく、第1格子14及び第2格子15の位置は固定したまま、第1格子14及び第2格子15に対してマルチ格子を移動させることで一定周期間隔のモアレ画像を複数得る。
【0093】
図32は、関節撮影装置1によるX線撮影の流れを示すフローチャートである。
X線撮影には上述のタルボ・ロー干渉計によるX線撮影方法が用いられ、被写体像の再構成には縞走査法が用いられる。関節撮影装置1ではマルチ格子12が等間隔毎に複数ステップ移動され、ステップ毎に撮影が行われて、各ステップのモアレ画像が得られる。
【0094】
ステップ数は2〜20、さらに好ましくは3〜10である。視認性の高い再構成画像を短時間で得るという観点からすれば、5ステップが好ましい(参照文献(1)K.Hibino, B.F.Oreb and D.I.Farrant, Phase shifting for nonsinusoidal wave forms with phase−shift errors, J.Opt.Soc.Am.A, Vol.12, 761−768(1995)、参照文献(2)A.Momose, W.Yashiro, Y. Takeda, Y.Suzuki and T.Hattori, Phase Tomography by X−ray Talbot Interferometetry for biological imaging, Jpn. J. Appl. Phys., Vol.45, 5254−5262(2006))。
【0095】
図32に示すように、オペレータにより曝射スイッチがON操作されると(ステップS1;Y)、x方向移動用モータ125aによりマルチ格子12が移動され、複数ステップの撮影が実行され、モアレ画像が生成される(ステップS2)。
まず、マルチ格子12が停止した状態でX線源11によるX線の照射が開始される。X線検出器16ではリセット後、X線照射のタイミングに合わせて電荷が蓄積され、X線の照射停止のタイミングに合わせて蓄積された電荷が画像信号として読み取られる。これが1ステップ分の撮影である。1ステップ分の撮影が終了するタイミングでマルチ格子12の移動が開始され、所定量移動すると停止され、次のステップの撮影が行われる。このようにして、マルチ格子12の移動と停止が所定のステップ数分だけ繰り返され、マルチ格子12が停止したときにX線の照射と画像信号の読み取りが行われる。読み取られた画像信号はモアレ画像として本体部18に出力される。
【0096】
例えば、マルチ格子12のスリット周期を22.8(μm)とし、5ステップの撮影を10秒で行うとする。マルチ格子12がそのスリット周期の1/5に該当する4.56(μm)移動し停止する毎に撮影が行われる。撮影時間でいえば爆射スイッチON後、2、4、6、8、10秒後にそれぞれ撮影が行われる。
【0097】
従来のように第2格子15(又は第1格子14)を第1格子14(又は第2格子15)に対して移動させる場合、第2格子15のスリット周期は比較的小さく、各ステップの移動量も小さくなるが、マルチ格子12のスリット周期は第2格子15よりも比較的大きく、各ステップの移動量も大きい。例えば、スリット周期5.3(μm)の第2格子15のステップ毎の移動量は1.06(μm)であるのに対し、スリット周期22.8(μm)のマルチ格子12の移動量は4.56(μm)と約4倍の大きさである。同一の駆動伝達系(駆動源、減速伝達系を含む)を使用し、各ステップの撮影に際し、x方向移動用モータ125aの起動と停止を繰り返して撮影を行った場合、移動用のパルスモータ(駆動源)の制御量(駆動パルス数)に対応した実際の移動量に占める、起動時及び停止時のx方向移動用モータ125aのバックラッシュ等の影響による移動量誤差の割合は、本実施形態のようにマルチ格子12を移動させる方式の方が小さくなる。これは、後述するサインカーブに沿ったモアレ画像を得やすく、起動及び停止を繰り返しても高精細な再構成画像が得られることを示している。或いは、従来方式による画像でも充分診断に適合する場合には、モータ(駆動源)を含む駆動伝達系全体の精度(特に、起動特性及び停止特性)を緩和し、駆動伝達系を構成する部品のコストダウンが可能であることを示している。
【0098】
各ステップの撮影が終了すると、本体部18からコントローラ5に、各ステップのモアレ画像が送信される(ステップS3)。本体部18からコントローラ5に対しては各ステップの撮影が終了する毎に1枚ずつ送信することとしてもよいし、各ステップの撮影が終了し、全てのモアレ画像が得られた後、まとめて送信することとしてもよい。
【0099】
図33は、モアレ画像を受信した後のコントローラ5の処理の流れを示すフローチャートである。
図33に示すように、まずモアレ画像の解析が行われ(ステップS11)、再構成画像の作成に使用できるか否かが判断される(ステップS12)。理想的な送り精度によりマルチ格子12を一定の送り量で移動できた場合、図34に示すように、5ステップの撮影でマルチ格子12のスリット周期1周期分のモアレ画像5枚が得られる。各ステップのモアレ画像は0.2周期という一定周期間隔毎に縞走査をした結果であるので、各モアレ画像の任意の1画素に注目すると、その信号値を正規化して得られるX線相対強度は、図35に示すようにサインカーブを描く。よって、コントローラ5は得られた各ステップのモアレ画像のある画素に注目してX線相対強度を求める。各モアレ画像から求められたX線相対強度が、図35に示すようなサインカーブを形成すれば、一定周期間隔のモアレ画像が得られているので、再構成画像の作成に使用できると判断することができる。
なお、上記サインカーブ形状は、マルチ格子開口幅、位相格子の周期、及び位相格子の格子間距離に依存し、また、放射光のようなコヒーレント光の場合には三角波形状となるが、マルチ格子効果によりX線が準コヒーレント光として作用する為、サインカーブを描くものとなる。
【0100】
各ステップのモアレ画像の中にサインカーブを形成できないモアレ画像がある場合、再構成画像の作成に使用できないと判断され(ステップS12;N)、撮影のタイミングを変更して再撮影するよう指示する制御情報がコントローラ5から関節撮影装置1に送信される(ステップS13)。例えば、図27に示すように、3ステップ目は本来0.4周期のところ、周期がずれて0.35周期のモアレ画像が得られた場合であれば、x方向移動用モータ125aの送り精度の低下が原因(例えば、パルスモータの駆動パルスへのノイズ重畳等)と考えられる。よって、0.05周期分だけ撮影のタイミングを早めて3ステップ目のみ再撮影を行うよう指示すればよい。或いは、5ステップ全てについて再撮影し、3ステップ目のみ0.05周期分の撮影時間を早めるように指示してもよい。5ステップ全てのモアレ画像が所定量ずつサインカーブからずれている場合、x方向移動用モータ125aの起動から停止までの駆動パルス数を増やすか、或いは減らすように指示してもよい。
関節撮影装置1では、当該制御情報に従って撮影のタイミングが調整され、図32に示すX線撮影の処理が再度実行される。
【0101】
一方、再構成画像の作成にモアレ画像を使用できると判断された場合(ステップS12;Y)、コントローラ5によってモアレ画像が処理され、被写体の再構成画像が作成される(ステップS14)。具体的には、5枚のモアレ画像の各画素についてステップ毎の強度変化(信号値の変化)が算出され、当該強度変化より微分位相が算出される。必要であれば、位相接続(位相アンラップ)が行われ、ステップ全体の位相が求められる。当該位相からz方向における光路差(屈折率差に起因する光路差)が算出され、被写体の形状を表す再構成画像が作成される(上記参照文献(1)、(2))。作成された再構成画像はコントローラ5に表示されるので、オペレータは当該再構成画像を確認することができる。
【0102】
以上のように、本実施形態によれば、関節撮影装置1は、人の手指等の被写体の関節部分を撮影する関節撮影装置1において、被写体台13は、撮影対象部分である関節部分をX線源11からのX線照射方向に対して所定の位置に固定する撮影対象固定ユニット33と、この撮影対象固定ユニットを着脱可能に構成され、被写体の手首部分を固定するベースユニット31とを備えている。これにより、患者が既にリウマチを発症している場合のように、関節部分等に病変を生じて痛みがある場合等、関節部分等を真っ直ぐに伸ばして被写体台13の上に載置ことが難しい場合でも、患者に負担をかけることなく撮影対象をしっかりと固定して撮影中の撮影対象のぶれや揺れ等を抑えることができる。
また、ベースユニット31に設けられている手首固定用ベルト313により手首を固定した上で、撮影対象固定ユニット33により撮影対象部分である関節部分を撮影に適した所定の位置に固定することができるため、患者が関節部分等を真っ直ぐに伸ばすことができない場合でも、被写体保持部材30から被写体が浮き上がらないようにすることができ、安定して固定することができる。このため、手指の震えや体動等により被写体が動いてしまうことを防止でき、画像のぶれや再撮影が生じるおそれ等を防ぐことができる。
また、撮影対象固定ユニット33として第1の撮影対象固定ユニット33aから第5の撮影対象固定ユニット33eを備えているため、撮影の目的や撮影対象部位、患者の手指の関節の状態等に応じて、ユーザである技師が最も適したものを選択することができる。このため、患者の負担をより少なくしながら、診断に適した画像を得ることができる。
また、複数のスリットを有するマルチ格子、及び/又は、第1の位相格子及び第2の位相格子を備え、モアレ画像を形成可能となっているため、縞走査方式により関節部分の撮影を行うことができ、X線吸収差が小さく、吸収コントラスト法によっては画像として現れにくい関節軟骨、関節周辺の軟部組織について診断に適した画像を得ることができる。
【0103】
なお、上記実施形態は本発明の好適な一例であり、本発明の範囲はこれに限定されない。
例えば、本実施形態では、被写体保持部材30を構成する撮影対象固定ユニット33として第1の撮影対象固定ユニット33aから第5の撮影対象固定ユニット33eの5種類が用意され、これらのうちから任意に選択してベースユニット31に装着できるように構成する例を示したが、撮影対象固定ユニット33の種類や数はこれに限定されない。
例えば、これらのうちのいずれか1つのみを備えてもよいし、他の形状の撮影対象固定ユニット33をさらに備えていてもよい。
【0104】
また、本実施形態では、関節撮影装置1によって手指の関節部分を撮影する場合について説明し、被写体保持部材30についても手指の撮影対象部位を保持・固定するものについて説明したが、関節撮影装置1によって撮影可能な部位は手指の関節部分に限定されず、例えば、肩や、足首、膝等の関節部分を撮影することも可能である。
この場合には、X線源11の光照射野内に肩、足首、膝等の関節部分を位置させるために、被写体台13の上に患者の脚部等を載置する必要がある。このため、患者の体重がかかっても被写体台13の本体や被写体台13の下方に位置する第1格子、第2格子等に負荷がかかったり影響が及ぶことがないように、例えば図36に示すような被写体台13の被写体台上面板3の上に被写体支持板7を配置する。被写体支持板7は、例えば支持板本体71とその裏面側に設けられた脚部72から構成されており、支持板本体71において
被写体台上面板3の透明板部材305に対応する部分にはX線源11から照射されるX線を妨げないように開口部73が設けられている。被写体支持板7の脚部72は、被写体台13の周囲を囲んで設けられているガード部材41の上端面に載置されるようになっている。このように、被写体支持板7をガード部材41の上端面で支持することによって被写体支持板7にかかった荷重や衝撃をガード部材41が吸収し、被写体台13や第1格子、第2格子等に衝撃等が及ぶことを防ぐことができる。
【0105】
また、肩、足首、膝等の関節部分を撮影する場合等、患者が全身を横たえて撮影を行う必要があるような場合には、図37に示すように適宜補助台8を被写体台13又は被写体支持板7に連結してもよい。
補助台8は、例えばキャスタ83を備える補助台基台部81と補助台上面板82とで構成されている。患者が補助台8に乗った際に補助台8が安定するように、補助台基台部81のキャスタ83にはキャスタ83をロックする図示しないロック機構が設けられていることが好ましい。各補助台8は他の補助台8や被写体台13(又は被写体支持板7)と互いに連結可能に構成されており、連結された際にはがたつき等が生じないように互いにロックする機構が設けられていることが好ましい。補助台8は、患者の身長や撮影部位等に応じて適宜必要な数だけ連結して用いられる。このように自由に連結して用いられるようにすることにより、1台の関節撮影装置1により各種の撮影に柔軟に対応することが可能となる。
【0106】
図38は、患者の左肩の関節部分を撮影する場合に、患者の頭部の側に1つ、下半身側に2つの補助台8を連結して撮影を行う例を示したものである。身体に角度を付けて撮影する必要があるような場合には、さらに患者の身体の下に適宜図示しないクッション等の補助部材を配置して調整する。
また、図39は、患者の右足首の関節部分を撮影する場合に、患者の頭部の側に1つ、下半身側に1つの補助台8を連結して撮影を行う例を示したものである。図39では、足首の角度を一定に保つために、クッション等の補助部材75をつま先部分の下に入れて調整する場合を示している。
また、図40は、患者の右膝の関節部分を撮影する場合に、図39に示した足首の撮影の場合と同様に、患者の頭部の側に1つ、下半身側に1つの補助台8を連結して撮影を行う例を示したものである。図40では、膝の角度を一定に保つために、クッション等の補助部材75を膝の下に入れて調整する場合を示している。
また、図41は、患者の左膝の関節部分を背面側から撮影する場合に、図39に示した足首の撮影の場合と同様に、患者の頭部の側に1つ、下半身側に1つの補助台8を連結するとともに、患者の頭部の側に配置した補助台8の上に患者の頭部側が高くなるように傾斜した補助板85を配置した例を示している。このような補助板85を用いた場合には、例えば図41に示すように、患者が上半身を反らせた姿勢を保った状態で撮影を行うことができる。なお、補助板85は補助台8と別体である場合に限定されず、例えば補助台上面板82にリクライニング機構を設けてリクライニング可能に構成する等、補助台8と一体的に設けられていてもよい。この場合には、複数段階の角度でリクライニング可能とすることが好ましい。また、この場合、すべての補助台8にリクライニング機構を設けてもよいし、一部の補助台8のみにリクライニング機構を設けて、リクライニング機構を備える補助台8と備えない補助台8とを適宜組み合わせて使用するようにしてもよい。
また、図42に示すように、補助台8を用いず、患者が市販のストレッチャー(stretcher:寝台車)9に乗ったまま、脚部を被写体支持板7の支持板本体71の上に載置して撮影を行ってもよい。
また、図37から図41では、連結可能な複数の補助台8を用いて撮影を行う場合を例示したが、被写体支持板7と補助台8とが一体となった寝台型の被写体保持台(図示せず)を用いて撮影を行ってもよい。この場合には、例えば被写体保持台の脚部を関節撮影装置1の被写体台13と干渉しない位置に設け、患者を乗せた被写体保持台を関節撮影装置1の前面側から横付けし、患者の撮影対象部位が関節撮影装置1の光照射野内に位置するように配置して撮影を行う。
なお、被写体支持板7や補助台8等は、撮影中、撮影対象である各部の関節部分等をX線源11の光照射野内に適切に保持・固定できるものであればよく、ここに例示したものに限定されない。その形状、構成等は、撮影対象部位等に応じて適宜変更可能である。
【0107】
また、上記実施形態では、被写体台上面板3に高さ調整のための機能を設ける構成としたが、被写体台13の脚部132に高さ調整のための機構を設けて、被写体台13自体の高さを調整するようにしてもよい。
【0108】
また、タルボ干渉計及びタルボ・ロー干渉計を用いて取得された再構成画像においては、周囲とのX線屈折率の差が大きい部分ほど大きな信号値として現れる。そのため、被写体内部の構造物(例えば、軟部組織周辺部等)を関心領域として撮影を行った場合、被写体表面に形状変化(例えば、皮部分の皺等)があると、被写体表面と周囲の空気とのX線屈折率差が比較的大きいため被写体表面の形状変化を示す信号値が大きく現れてしまい、関心領域の構造を示す微小な信号値の変化と重畳し、当該関心領域の信号値の視認性が悪くなってしまう。
【0109】
被写体表面の皮部分(皺を含む)と被写体内部の関心領域(軟部組織周辺部)とがz方向に重畳していなければ、関心領域(軟部組織周辺部)は空気中の撮影でも視認可能であるが、被写体内部の関心領域が被写体表面構造に対し、どのような相対位置関係にあるかを撮影前に把握するのは困難である。
そこで、図43に示すように、被写体表面と周囲とのX線屈折率差を低減させる液状物511を内部に保持する屈折率調整タンク51を被写体台13に設けて、撮影時には、この液状物511の中に被写体(ここでは手)を入れて撮影を行ってもよい。
被写体表面と周囲とのX線屈折率差を低減させる液状物511は、例えば水である。水は、空気よりもX線屈折率が被写体表面に近い。また、水中に手を入れれば、被写体表面は水で覆われ、水は水圧により被写体表面に密着する。よって、被写体表面とその周囲とのX線屈折率の差は低減される。
なお、被写体を覆う液状物511としては、水がもっとも簡便、安価、安全であり、好ましいが、水に香料、消毒薬、色素など添加して患者の安心感を増す工夫を施したものを用いてもよい。また、水ではなく、より人体の肉や体液に近い液状物511を使用することは好ましい態様である。例えばヒアロルン酸溶液、ゼラチン溶液、グリセリン溶液、マンノース溶液、米汁、片栗粉液等を単独で又は水との溶液としたものを使用することができる。
【0110】
なお、タルボ干渉計やタルボ・ロー干渉計を用いて撮影を行う場合、複数のモアレ画像を撮影するため、撮影時間が従来の単純X線撮影系と比べて長くなることが想定される(数分レベル)。この間、被写体が動いてしまう可能性がある。この点、液状物511を内部に保持した屈折率調整タンク51の中に被写体(ここでは手)を入れて撮影を行えば、水圧によって被写体を押さえて固定させることができる。屈折率調整タンク51は、例えば図43に示すように、浮蓋512を有するとともに、パイプ513を介してサブタンク514に接続された構成とすることが好ましい。このような構成の屈折率調整タンク51を用いて撮影を行うことにより、被写体を圧迫して押さえることで撮影時の被写体のz方向、特に、X線管球方向への動きを抑えることができ、再構成画像の診断精度を向上させることができる。なお、被写体をより安定させるため、被写体台13は肘から指先までを保持できるだけの長さを有することが好ましい。これは患者が撮影対象周辺部の荷重(体重)を被写体台に預けることができ、従って、関心領域である指を不意に動かす確率を極めて低くすることが可能となる。
【0111】
また、上記実施形態では、X線源11、マルチ格子12、被写体台13、第1格子14、第2格子15、X線検出器16をこの順に配置(以下、第1の配置と呼ぶ)したが、X線源11、マルチ格子12、第1格子14、被写体台13、第2格子15、X線検出器16の配置(以下、第2の配置と呼ぶ)としても、第1格子14及び第2格子15は固定のまま、マルチ格子12の移動により、再構成画像を得ることが可能である。
第2の配置においては、被写体の厚み分だけ、被写体中心と第1格子14は離れることになり、上記の実施形態に比べ感度の点でやや劣ることになるが、一方で、被写体への被曝線量低減を考慮すると、当該配置の方が第1格子14でのX線吸収分だけX線を有効に活用していることになる。
また、被写体位置での実効的な空間分解能は、X線の焦点径、検出器の空間分解能、被写体の拡大率、被写体の厚さ等に依存するが、上記実施例に於ける検出器の空間分解能が120μm(ガウスの半値幅)以下の場合には、第1の配置よりも第2の配置の方が実効的な空間分解能は小さくなる。
感度、空間分解能、及び、第1格子14でのX線吸収量等を考慮して、第1格子14、被写体台13の配置順をきめることが好ましい。
【0112】
また、本実施形態では、縞走査方式として、マルチ格子、第1格子及び第2格子を備えるタルボ・ロー干渉計を用いた関節撮影装置を例として説明したが、関節撮影装置に用いられるのはタルボ・ロー干渉計に限定されず、縞走査方式として、第1格子及び第2格子を備えるタルボ干渉計を用いた関節撮影装置についても本発明を適用することができる。
さらに、関節撮影装置は、縞走査方式を用いたものに限定されない。例えば、一次元格子や2次元格子を用いた縞走査不要のフーリエ変換方式や、通常の位相コントラスト方式による撮影を行う関節撮影装置に本発明を適用してもよく、被写体の体動リスクをより低減することができ好ましい。
【0113】
また、本実施形態では、被写体台13を完全に別体構成としたものを例として説明したが、被写体台13を基台部19等に固定してもよい。この場合には、被写体台13と基台部19との間に緩衝部材等を設けて、被写体台13に加えられた衝撃や振動ができる限り基台部19に伝達されないように構成する。
また、被写体台13は、その高さを患者の体型等に応じて調整できるようにしてもよい。
【0114】
また、本実施形態では、マルチ格子ユニット120、第1格子ユニット140、第2格子ユニット150にそれぞれ煽り調整機構及び相対距離調整機構が設けられている場合を例として説明したが、煽り調整機構及び相対距離調整機構は、マルチ格子ユニット120、第1格子ユニット140、第2格子ユニット150全てに設けられている必要はなく、このうちの少なくともいずれか1つに設けられていてもよい。
【0115】
また、本実施形態では、マルチ格子12を移動させてモアレ画像を生成する場合を例として説明したが、モアレ画像を生成するために移動させる格子はマルチ格子12に限定されず、第1格子14、第2格子15であってもよい。
【0116】
また、X線検出器16として、バッテリを内蔵し、無線により画像信号を本体部18に出力するケーブルレスのカセッテタイプFPDを用いてもよい。カセッテタイプFPDによれば、本体部18に接続するケーブル類を排除することができ、X線検出器16周辺の更なる小スペース化を図ることができる。小スペース化によって被写体の足下を広く構成し、より患者が接触し難い構成とすることができる。
【0117】
また、コントローラ5の制御部が縞走査法による再構成画像作成処理の他、フーリエ変換法による再構成画像作成処理等を行うようにしてもよい(この場合、関節撮影装置の第1格子と第2格子との相対角のみ、縞走査法の場合に対し増大させるような装置設定変更が必要である。)。
例えば、フーリエ変換法による再構成画像作成処理は、以下のように行われる。
まず、被写体有りのモアレ画像と被写体無しのモアレ画像とを取得し、それぞれについてオフセット補正処理、ゲイン補正処理等の補正を行う。その後、補正後の被写体有りのモアレ画像と被写体無しのモアレ画像のそれぞれをフーリエ変換(二次元フーリエ変換)する。1枚のモアレ画像をフーリエ変換すると、低周波成分(0次成分と呼ぶ)と干渉縞周波数付近の成分(1次成分と呼ぶ)、又は、0次成分と1次成分に加えさらに高周波成分(関節撮影装置1の干渉性に依存)が並んで得られる。
次いで、フーリエ変換により得られた画像(被写体有り、被写体無しのそれぞれ)において、0次成分をHanning窓により切り出される。Hanning窓で切り出すことによりHanning窓の周辺部が0に落とされ、Hanning窓の中心部はそのまま通される。
次いで、フーリエ変換により得られた画像において、1次成分がキャリア周波数(=モアレ周波数)分シフトされ、Hanning窓で切り出される。切り出しの窓関数はHanning窓に限定されず、用途に応じてHamming窓、ガウス窓等を使用してもよい。
次いで、切り出された0次成分、1次成分のそれぞれが逆フーリエ変換される。
逆フーリエ変換が終了すると、逆フーリエ変換された0次成分、1次成分を用いて被写体有りと被写体無しのそれぞれの再構成画像の作成が行われる。具体的には、0次成分の振幅から吸収画像が作成される。また、1次成分の位相から位相画像が作成される。また、0次成分と1次成分の振幅の比(=Visibility)から小角散乱画像が作成される。
次いで、被写体無しの再構成画像を用いて被写体有りの再構成画像から干渉縞の位相の除去と、画像ムラ(アーチファクト)を除去するための補正処理が行われ、この画像ムラの補正が終了すると、フーリエ変換法による再構成画像作成処理は終了する。
【0118】
その他、本発明が本実施形態に限定されず、適宜変更可能であることはいうまでもない。
【符号の説明】
【0119】
1 関節撮影装置
5 コントローラ
11 X線源
12 マルチ格子
13 被写体台
14 第1格子
15 第2格子
16 X線検出器
17 支柱
17a 緩衝部材
18 本体部
19 基台部
21 第1のカバーユニット
22 第2のカバーユニット
30 被写体保持部材
31 ベースユニット
33 撮影対象固定ユニット
41 ガード部材
【特許請求の範囲】
【請求項1】
被写体である人の手指を撮影位置に保持する被写体台と、
前記被写体台の上方に配置され、被写体の撮影対象部分である手指の関節部分に放射線を照射する放射線発生手段、及び前記被写体台の下方に配置され、前記関節部分を透過した放射線を検出する検出手段を有する撮影部と、
を備えている関節撮影装置であって、
前記被写体台は、
前記撮影対象部分である関節部分を前記放射線発生手段からの放射線照射方向に対して所定の位置に固定する撮影対象固定ユニットと、
前記撮影対象固定ユニットを着脱可能に構成され、前記被写体の手首部分を固定するベースユニットと、
を備えていることを特徴とする関節撮影装置。
【請求項2】
互いに異なる所定の位置に手指の関節部分を固定する複数の前記撮影対象固定ユニットを備え、
当該複数の撮影対象固定ユニットのそれぞれが、前記ベースユニットに着脱可能に構成されていることを特徴とする請求項1に記載の関節撮影装置。
【請求項3】
前記放射線発生手段からの放射線照射方向と直交する方向に延在して複数のスリットが所定間隔で設けられている第1格子及び第2格子を備えている縞走査型撮影装置であることを特徴とする請求項1又は請求項2に記載の関節撮影装置。
【請求項4】
前記放射線発生手段近傍に配置されたマルチ格子を備え、
当該マルチ格子を前記第1格子及び前記第2格子に対して相対移動させるタルボ・ロー干渉計であることを特徴とする請求項3に記載の関節撮影装置。
【請求項1】
被写体である人の手指を撮影位置に保持する被写体台と、
前記被写体台の上方に配置され、被写体の撮影対象部分である手指の関節部分に放射線を照射する放射線発生手段、及び前記被写体台の下方に配置され、前記関節部分を透過した放射線を検出する検出手段を有する撮影部と、
を備えている関節撮影装置であって、
前記被写体台は、
前記撮影対象部分である関節部分を前記放射線発生手段からの放射線照射方向に対して所定の位置に固定する撮影対象固定ユニットと、
前記撮影対象固定ユニットを着脱可能に構成され、前記被写体の手首部分を固定するベースユニットと、
を備えていることを特徴とする関節撮影装置。
【請求項2】
互いに異なる所定の位置に手指の関節部分を固定する複数の前記撮影対象固定ユニットを備え、
当該複数の撮影対象固定ユニットのそれぞれが、前記ベースユニットに着脱可能に構成されていることを特徴とする請求項1に記載の関節撮影装置。
【請求項3】
前記放射線発生手段からの放射線照射方向と直交する方向に延在して複数のスリットが所定間隔で設けられている第1格子及び第2格子を備えている縞走査型撮影装置であることを特徴とする請求項1又は請求項2に記載の関節撮影装置。
【請求項4】
前記放射線発生手段近傍に配置されたマルチ格子を備え、
当該マルチ格子を前記第1格子及び前記第2格子に対して相対移動させるタルボ・ロー干渉計であることを特徴とする請求項3に記載の関節撮影装置。
【図1】


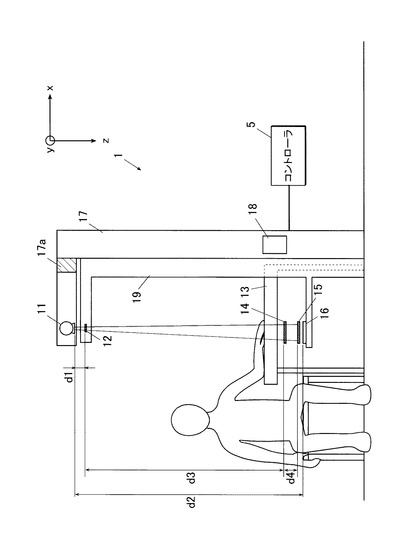
【図2】
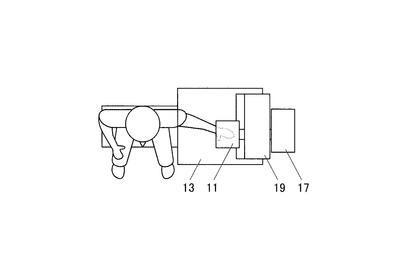
【図3】
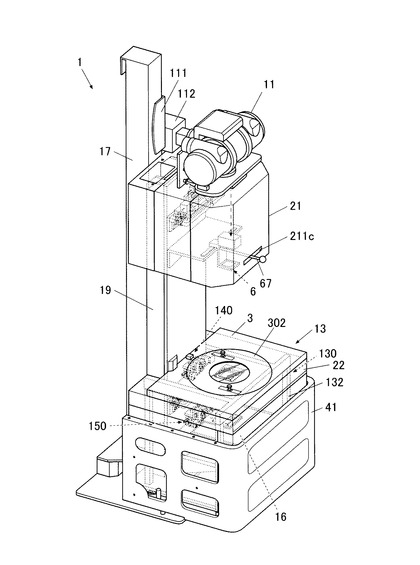
【図4】
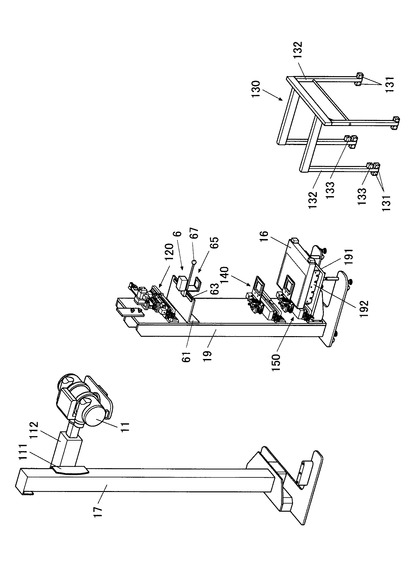
【図5】
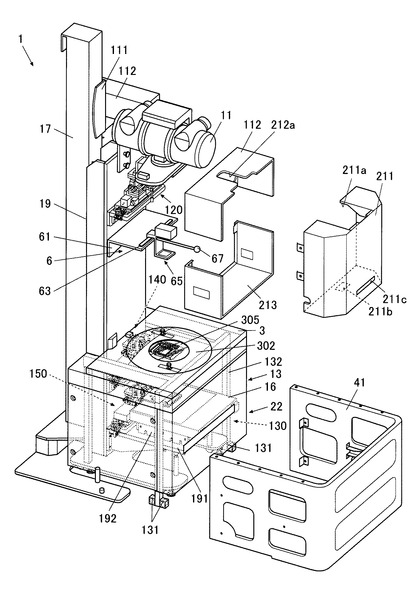
【図6】
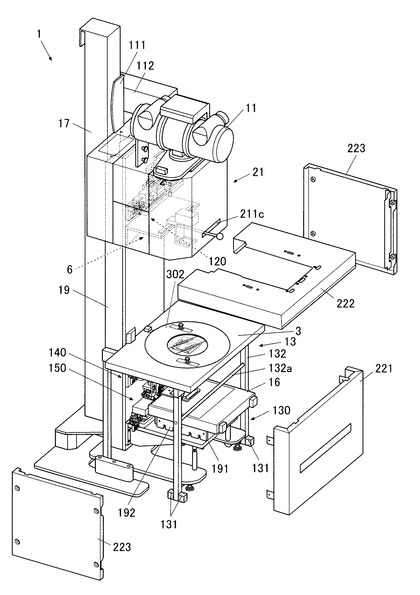
【図7】
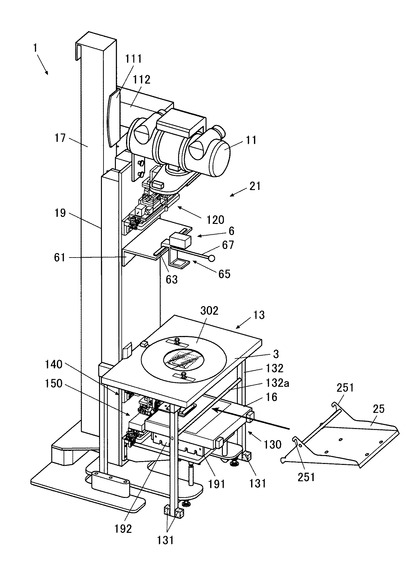
【図8】
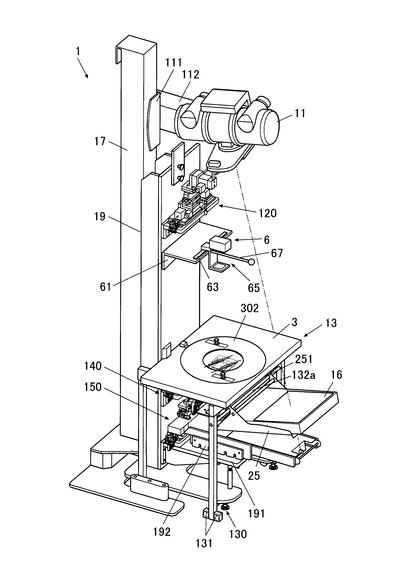
【図9】
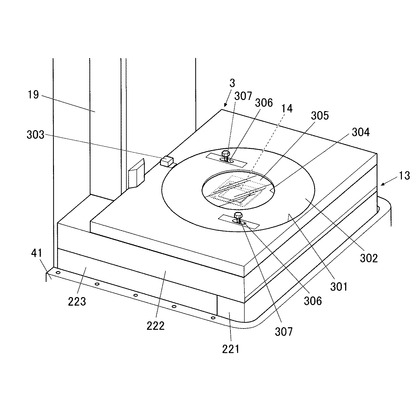
【図10】
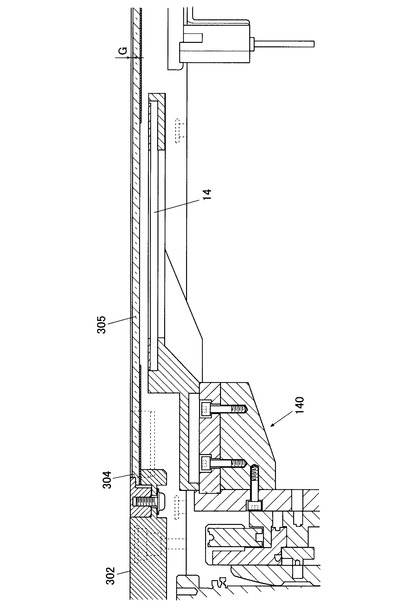
【図11】
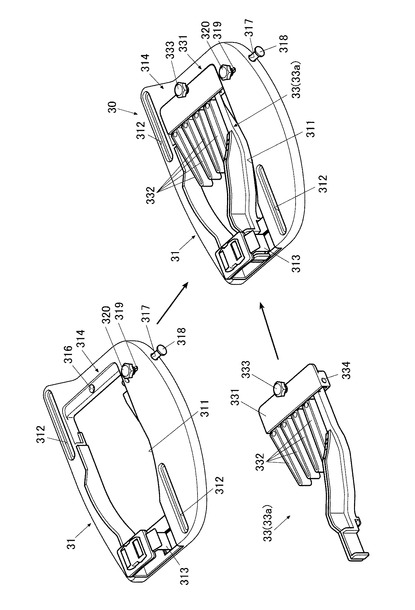
【図12】
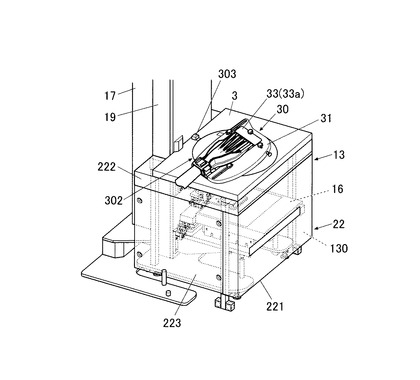
【図13】
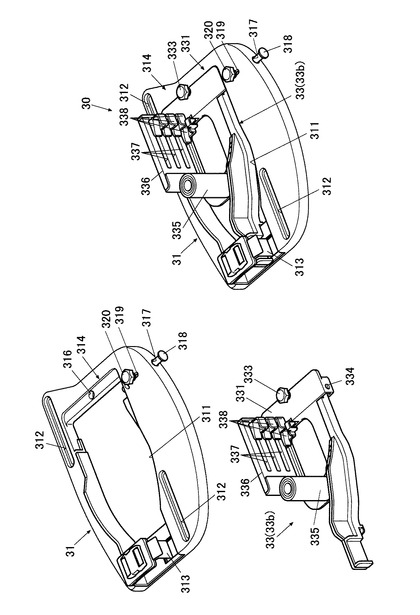
【図14】
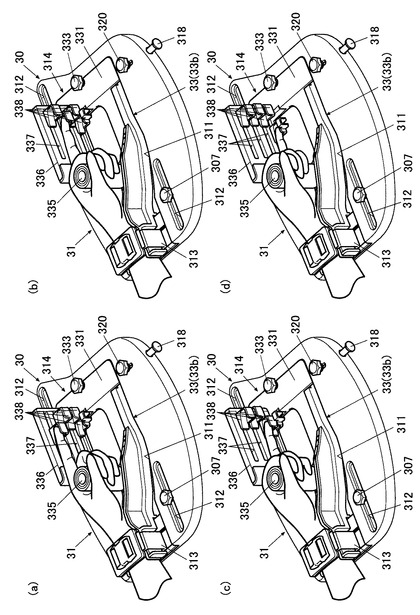
【図15】
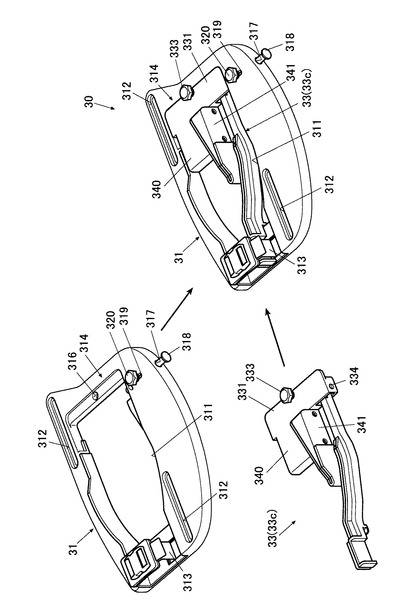
【図16】
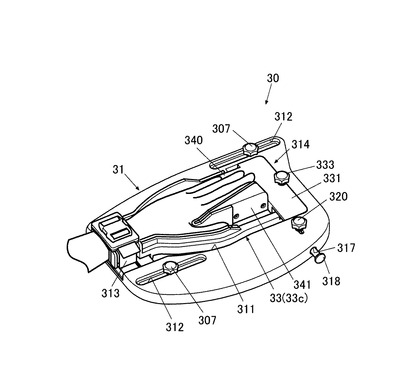
【図17】
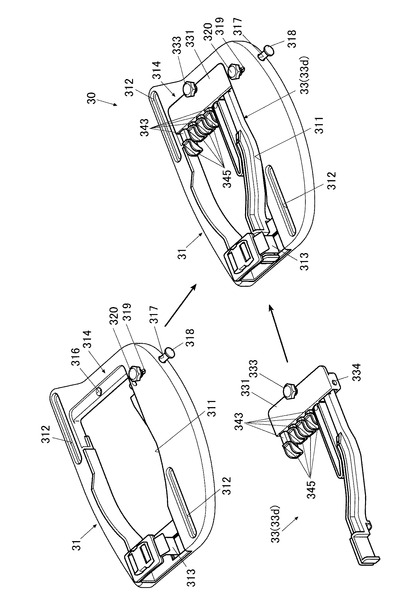
【図18】
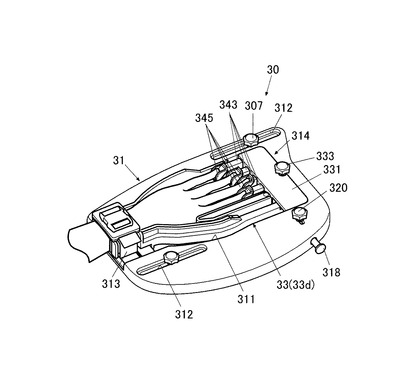
【図19】
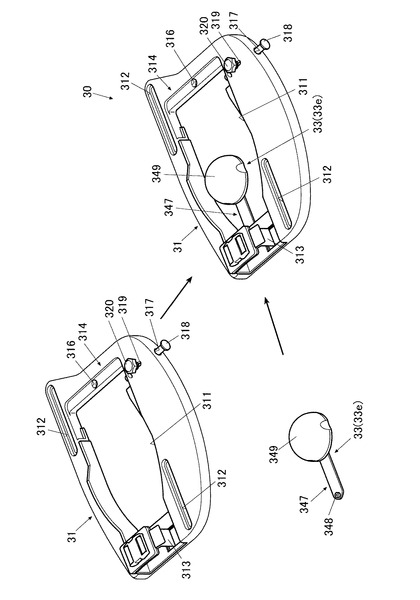
【図20】
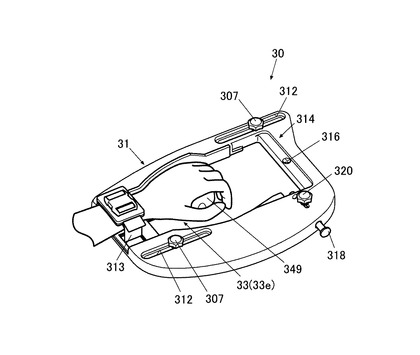
【図21】
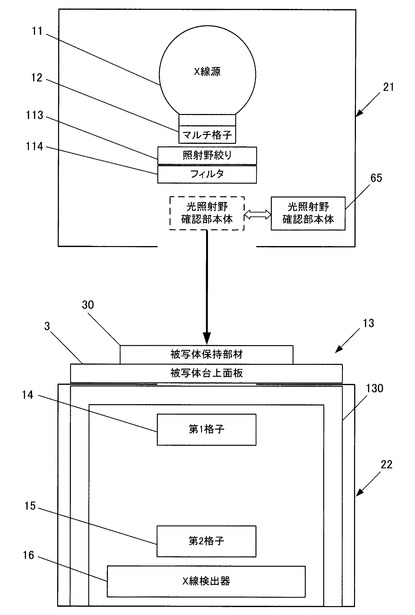
【図22】
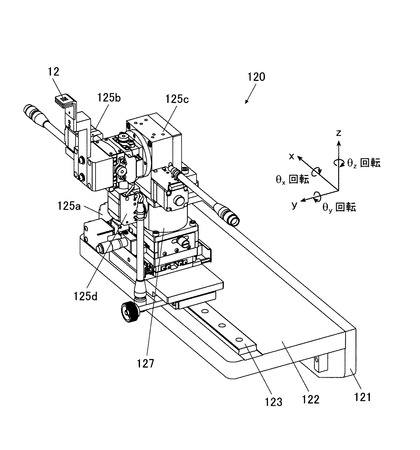
【図23】
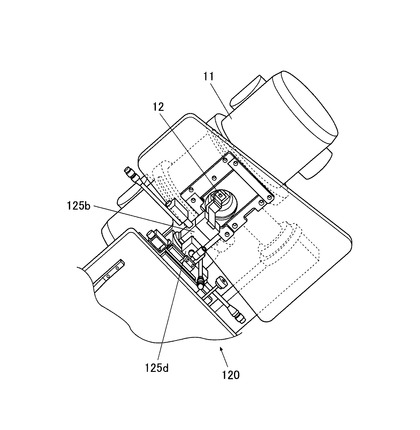
【図24】
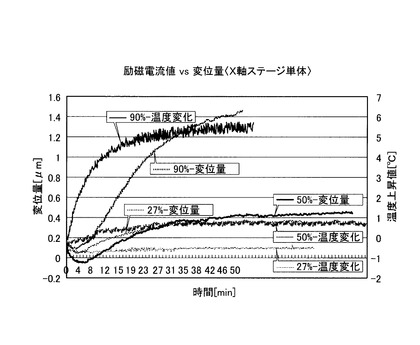
【図25】
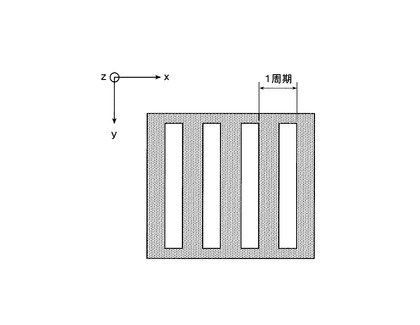
【図26】
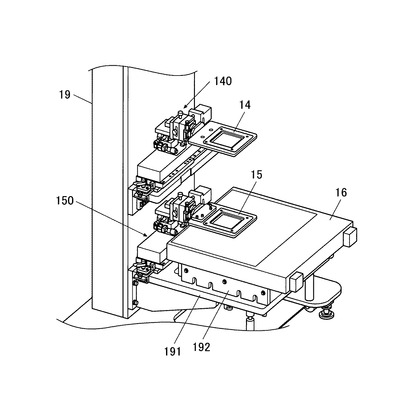
【図27】
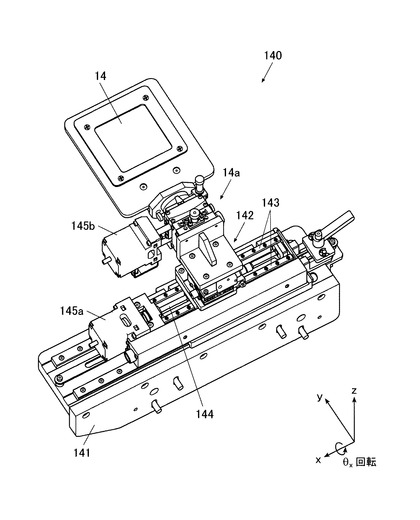
【図28】
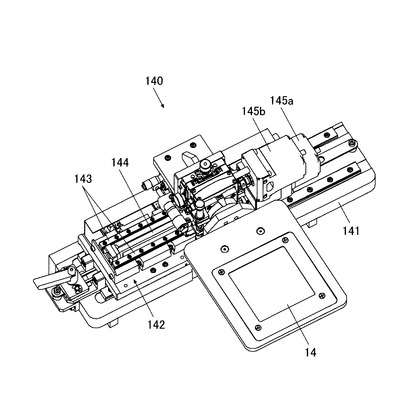
【図29】
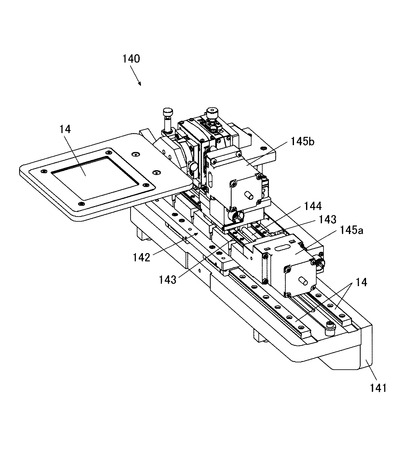
【図30】
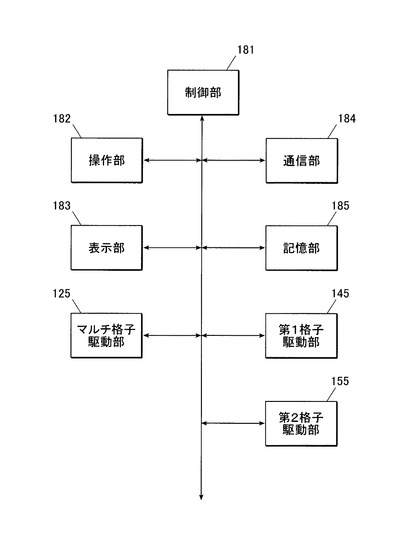
【図31】
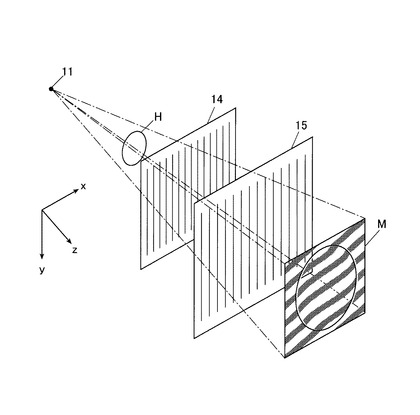
【図32】
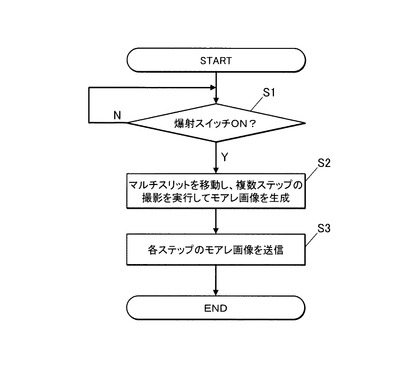
【図33】
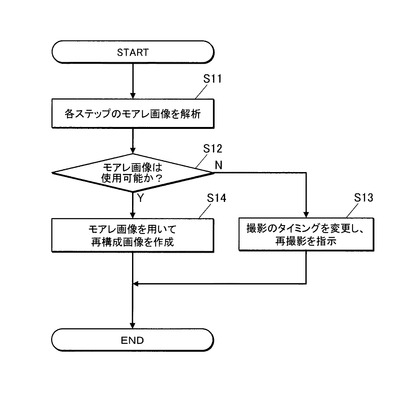
【図34】
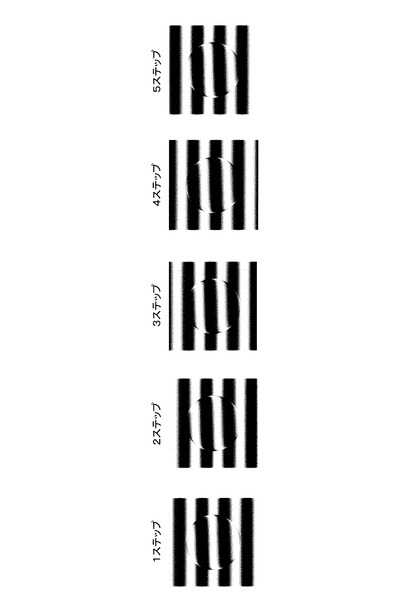
【図35】
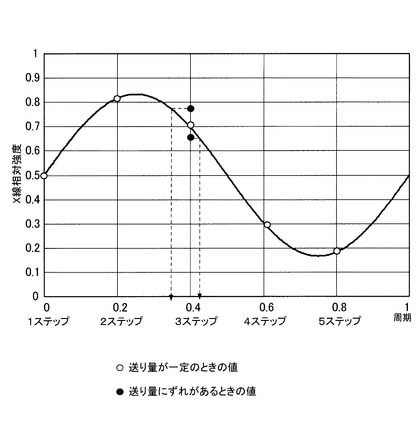
【図36】
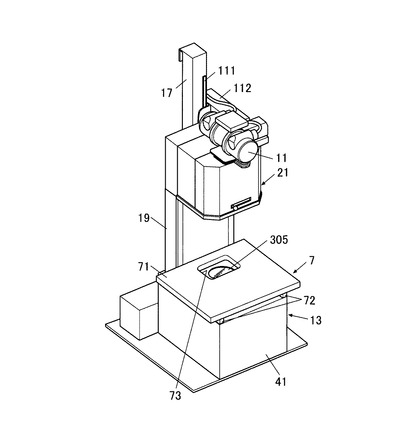
【図37】
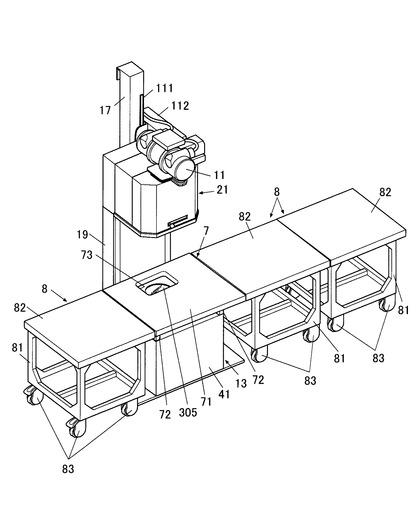
【図38】
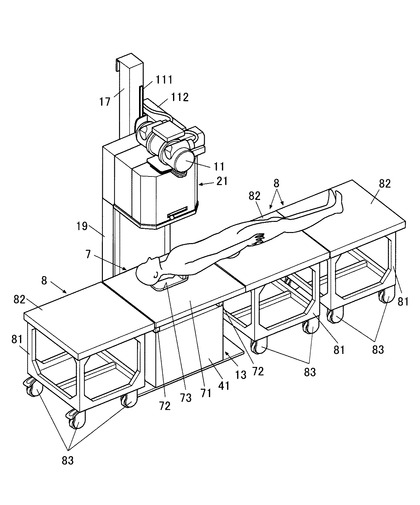
【図39】
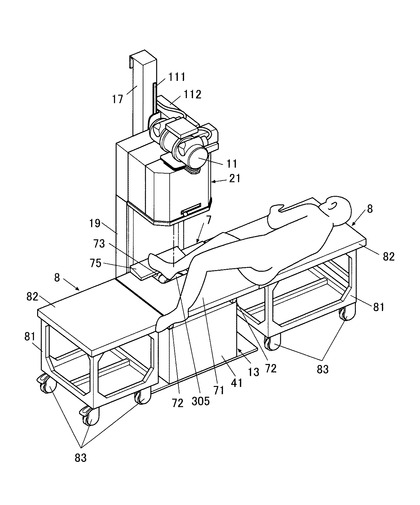
【図40】
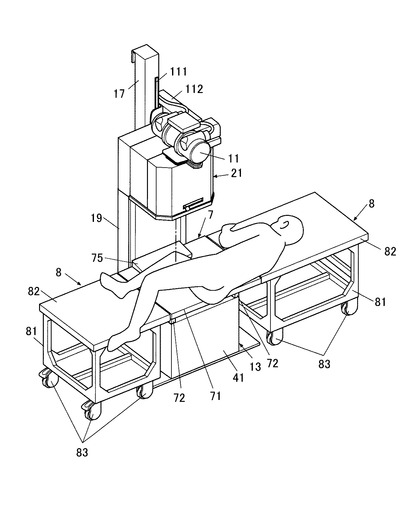
【図41】
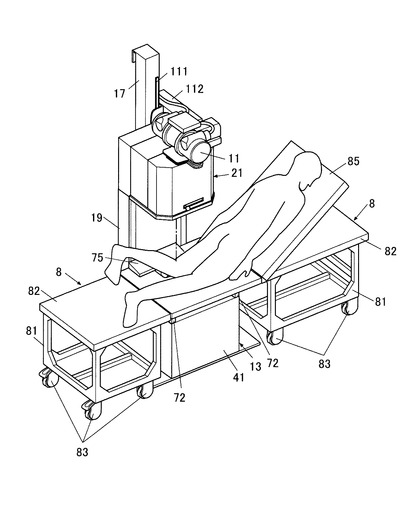
【図42】
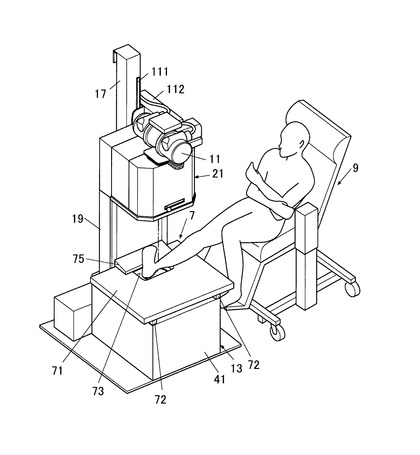
【図43】
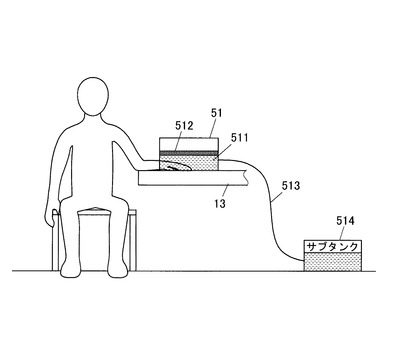
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【図33】
【図34】
【図35】
【図36】
【図37】
【図38】
【図39】
【図40】
【図41】
【図42】
【図43】
【公開番号】特開2013−85631(P2013−85631A)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願番号】特願2011−227557(P2011−227557)
【出願日】平成23年10月17日(2011.10.17)
【出願人】(303000420)コニカミノルタエムジー株式会社 (2,950)
【Fターム(参考)】
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願日】平成23年10月17日(2011.10.17)
【出願人】(303000420)コニカミノルタエムジー株式会社 (2,950)
【Fターム(参考)】
[ Back to top ]