
関節構造
【課題】人形、ロボット、模型等の関節において、関節の角度を任意に保持でき易いと同時に、角度を滑らかに変化させ易い関節構造を提供する。
【解決手段】球面7で接し、接する両側の部分を、中央を挿通させる弾性線材9により互いに引っ張り押圧する。この挿通された弾性線材9が保持される小さな挿通保持孔13が、前記球面7の凹側の1部と、前記球面7の凸側で球面7から等距離中心部19と、に形成される。
このため、関節の角度が変化しても弾性線材9の長さはほぼ同じである。よって、弾性線材9の長さが短くなる角度に自然に変化してしまうことがない。したがって設定角度が保持でき易い。このため、角度を維持するに摩擦を大きくする必要がなく、小さな摩擦で角度を滑らかに変化させやすい。
【解決手段】球面7で接し、接する両側の部分を、中央を挿通させる弾性線材9により互いに引っ張り押圧する。この挿通された弾性線材9が保持される小さな挿通保持孔13が、前記球面7の凹側の1部と、前記球面7の凸側で球面7から等距離中心部19と、に形成される。
このため、関節の角度が変化しても弾性線材9の長さはほぼ同じである。よって、弾性線材9の長さが短くなる角度に自然に変化してしまうことがない。したがって設定角度が保持でき易い。このため、角度を維持するに摩擦を大きくする必要がなく、小さな摩擦で角度を滑らかに変化させやすい。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、人形、ロボット、模型等の関節の構造に関する。
【背景技術】
【0002】
人形、ロボット、あるいは動物や恐竜などの模型、あるいはこれらの玩具などの関節は、可動範囲で任意の角度に滑らかに変化でき、その角度を保持でき、外れにくいことが必要である。
そのための関節の構造として、球面で接し、接する両側の部分を、これら両側の中央を挿通させる弾性線材により互いに引っ張られて押圧する構造が提案される。この弾性線材としては、ゴム紐、コイルバネに接続される紐やワイヤなどが採用される。
【0003】
例えば下記の特許文献1の人形の膝関節は、接する部分が球面の一部を形成し、ゴム紐により引っ張る構造になっている。
また、下記の特許文献2の人形の肩関節や股関節は、接する部分が球面の一部を形成し、紐状の弾性体により引っ張る構造になっている。
【特許文献1】特開2005−52393
【特許文献2】実用新案登録3058140
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1、2の関節の構造では、可動範囲で任意の角度に設定しても、その設定角度が保持でき難く、角度が変わってしまうものであった。このため設定角度を維持するには、接する面の摩擦を大きくする必要がある。しかし、摩擦を大きくすると、角度を滑らかに変化させ難くなる。
【0005】
この発明は、以上の問題点を解決するために、角度を保持でき易いと同時に、角度を滑らかに変化させ易い関節構造を提供することを目的とする。
【課題を解決するための手段】
【0006】
以上の課題を解決するために、第一発明は、球面で接し、接する両側の部分を、中央を挿通させる弾性線材により互いに押圧する関節において、前記挿通された弾性線材が全径方向に保持される挿通保持孔が、前記球面の凹側の1部と、前記球面の凸側で球面から等距離中心部と、に形成されたことを特徴とする関節構造である。
【0007】
また、第二発明は、前記関節は、模型の脊椎関節であり、前記球面で接する両側の部分は、ともに椎骨であり、関節が真っ直ぐの状態で、前記挿通保持孔が形成される前記球面の凹側での一部は、この凹側球面の中心であり、前記挿通保持孔が形成される前記球面の凸側での球面から等距離中心部は、この凸側球面に形成される略円錐状の空間の奥側頂部に位置することを特徴とする関節構造である。
【発明の効果】
【0008】
特許文献1、2の関節の構造では、関節の角度によって弾性線材の長さが変化してしまう構造になっているので、弾性線材の長さが短くなる角度に自然に変化してしまい、よって設定角度が保持でき難いものであった。
【0009】
これに対し、第一、又は第二発明によれば、弾性線材が全径方向に保持される挿通保持孔が、接する球面の凹側の1部と、接する球面の凸側で球面から等距離中心部と、に形成されているので、関節の角度が変化しても弾性線材の長さはほぼ同じである。よって、弾性線材の長さが短くなる角度に自然に変化してしまうことがない。したがって設定角度が保持でき易い。このため、角度を維持するに摩擦を大きくする必要がなく、小さな摩擦で角度を滑らかに変化させやすい。
【0010】
第二発明によれば、さらに、関節が真っ直ぐの状態で、挿通保持孔が形成される球面の凹側での一部は、この凹側球面の中心であることから、関節が真っ直ぐの状態から全ての角度に均等に変化し易く、よって脊椎関節に適する。また、挿通保持孔が形成される球面の凸側での球面から等距離中心部は、この凸側球面に形成される略円錐状の空間の奥側頂部に位置することにより、この略円錐状の空間でのみ弾性線材が動くことができ、よってこの略円錐状の角度により脊椎関節の可動範囲を設定し易い。
【発明を実施するための最良の形態】
【0011】
この発明の実施形態を、図1から図3に示す。
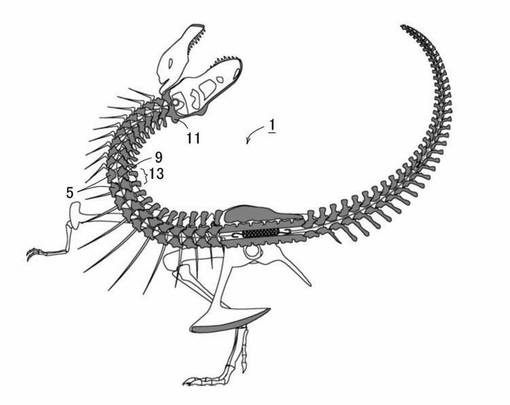
図2に示すように、この実施形態は、恐竜の骨格の模型1に採用され、特に、脊椎関節3に適用されている。脊椎は、複数の椎骨5が直列に接している。脊椎関節3は、隣り合う椎骨5が球面7で接する。この球面7は、関節の可動範囲で形成され、よって、完全な球の一部のみをなす。
【0012】
この隣り合う椎骨5が接する部分の中央を弾性線材9により挿通させる。弾性線材9は、この実施形態では、細い径のゴム紐、または径の小さなコイルバネ、あるいはコイルバネに直列接続される紐(図2参照)またはワイヤーが使用可能である。
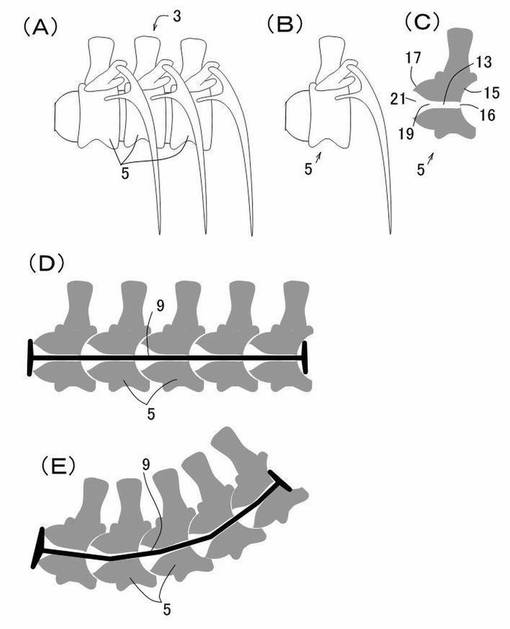
弾性線材9は、図2のように、多数個の椎骨5を挿通されて、最両端が椎骨5、または椎骨5に接する他の骨11に係止される。あるいは、図3(D)(E)のように、より少ない数個の椎骨5を挿通されて、両端が椎骨5に係止される。さらには、あるいは、図1のように、2個の椎骨5を挿通されて、両端が椎骨5に係止される。このような弾性線材9の働きで、接する椎骨5は、互いに引っ張られ押圧される。
【0013】
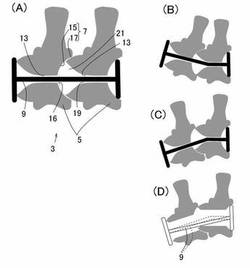
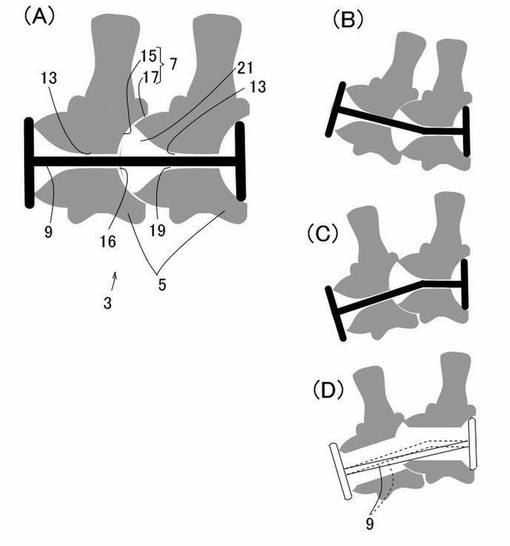
図1(A)に示すように、椎骨5には、弾性線材9の動きを規制するための構造が形成される。すなわち、弾性線材9が挿通される小さな径の挿通保持孔13が、椎骨5の中央に形成される。この挿通保持孔13の径は、弾性線材9の径とほぼ同じであり、よって、挿通された弾性線材9は、全ての半径方向、つまり全径方向に保持され、半径方向の動きが規制される。
【0014】
さらに、この挿通保持孔13が形成される位置は、接する球面7の凹側と凸側の2箇所である。すなわち、関節が真っ直ぐの状態で、凹側では、この凹側球面15の中心部16である。凸側では、凸側球面17からの等距離中心部19である。この等距離中心部19は、凸側球面17に形成されて奥側が細くテーパー状になる略円錐状21の空間において、奥側頂部に位置する。
【0015】
「実施形態の効果」
まず、特許文献1の図6、図7に示される人形の膝関節のように、あるいは特許文献2の図1に示される人形の肩関節や股関節のように、弾性線材9が全径方向に保持される挿通保持孔13が設けられておらず大きな空洞を有する場合を図1(D)に示す。このような関節の構造では、関節の角度によって、弾性線材9の関節に対する位置が変化し、その結果、弾性線材9の長さが変化してしまう。
【0016】
すなわち、図中の点線の状態よりも実線の状態のほうが短い。このため、希望する角度、例えば真っ直ぐの状態に関節を設定しても、弾性線材9の長さが短くなる角度、すなわち曲がった実線の状態に自然に変化してしまい、よって設定角度が保持でき難いものであった。
【0017】
これに対し、この実施形態によれば、弾性線材9を全径方向に保持する小さな径の挿通保持孔13が、凹側球面15の中心と、凸側球面17からの等距離中心部19とに形成されているので、弾性線材9の半径方向の動きは規制される。このため、関節の角度が変化しても(図1(B)(C))、弾性線材9の関節に対する位置は変化せず、よって弾性線材9の長さは真っ直ぐな状態(図1(A))とほぼ同じである。このため、弾性線材9の長さが短くなる角度に自然に変化してしまうことがない。
【0018】
したがって設定角度が保持でき易い。このため、角度を維持するに摩擦を大きくする必要がなく、小さな摩擦で角度を滑らかに変化させやすい。
さらに、関節が真っ直ぐの状態で、挿通保持孔13が形成される球面7の凹側での一部は、この凹側球面15の中心であること、また、挿通保持孔13が形成される球面7の凸側での球面7から等距離中心部19は、この凸側球面17に形成される略円錐状21の空間の奥側頂部に位置することにより、関節が真っ直ぐの状態から全ての角度に均等に変化し易く、よって脊椎関節3に適する。
【0019】
また、挿通保持孔13が略円錐状21の空間の奥側頂部に位置することにより、この略円錐状21の空間でのみ弾性線材9が動くことができ、よってこの略円錐状21の角度により脊椎関節3の可動範囲を設定し易い。すなわち可動範囲が広い関節、狭い関節を、容易に自在に設定できる。
【0020】
「他の実施形態」
以上の実施形態では、恐竜の骨格の模型1で特に脊椎関節3に実施されたものであったが、他の実施形態では、人形、ロボット、あるいは動物や恐竜などの模型、あるいはこれらの玩具などの関節で、脊椎関節3のみならず、腕や脚の関節にも実施できる。
【図面の簡単な説明】
【0021】
【図1】この発明の実施形態にかかる関節構造の作用効果を、脊椎関節の椎骨が2個の場合に示す断面図で、(A)は関節が真っ直ぐの状態を示す図、(B)および(C)は関節がある角度になった状態を示す図、(D)は弾性線材が全径方向に保持される挿通保持孔が設けられていない場合の図、である。
【図2】この発明の一実施形態にかかる関節構造を採用した脊椎を断面で示した恐竜の全身骨格の模型図である。
【図3】(A)は図2の脊椎の一部の外観を側方から見た図、(B)は(A)の脊椎を構成する一個の椎骨の外観を側方から見た図、(C)は(B)の断面図、(D)は(C)の椎骨を数個直列に接し弾性線材が挿通された状態を示す図、(E)は(D)の各間接の角度を変えた動作図である。
【符号の説明】
【0022】
1…恐竜の骨格の模型、3…脊椎関節、5…椎骨、7…球面、9…弾性線材、11…他の骨、13…挿通保持孔、15…凹側球面、16・・凹側球面の中心部、17…凸側球面、19…等距離中心部、21…略円錐状。
【技術分野】
【0001】
この発明は、人形、ロボット、模型等の関節の構造に関する。
【背景技術】
【0002】
人形、ロボット、あるいは動物や恐竜などの模型、あるいはこれらの玩具などの関節は、可動範囲で任意の角度に滑らかに変化でき、その角度を保持でき、外れにくいことが必要である。
そのための関節の構造として、球面で接し、接する両側の部分を、これら両側の中央を挿通させる弾性線材により互いに引っ張られて押圧する構造が提案される。この弾性線材としては、ゴム紐、コイルバネに接続される紐やワイヤなどが採用される。
【0003】
例えば下記の特許文献1の人形の膝関節は、接する部分が球面の一部を形成し、ゴム紐により引っ張る構造になっている。
また、下記の特許文献2の人形の肩関節や股関節は、接する部分が球面の一部を形成し、紐状の弾性体により引っ張る構造になっている。
【特許文献1】特開2005−52393
【特許文献2】実用新案登録3058140
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1、2の関節の構造では、可動範囲で任意の角度に設定しても、その設定角度が保持でき難く、角度が変わってしまうものであった。このため設定角度を維持するには、接する面の摩擦を大きくする必要がある。しかし、摩擦を大きくすると、角度を滑らかに変化させ難くなる。
【0005】
この発明は、以上の問題点を解決するために、角度を保持でき易いと同時に、角度を滑らかに変化させ易い関節構造を提供することを目的とする。
【課題を解決するための手段】
【0006】
以上の課題を解決するために、第一発明は、球面で接し、接する両側の部分を、中央を挿通させる弾性線材により互いに押圧する関節において、前記挿通された弾性線材が全径方向に保持される挿通保持孔が、前記球面の凹側の1部と、前記球面の凸側で球面から等距離中心部と、に形成されたことを特徴とする関節構造である。
【0007】
また、第二発明は、前記関節は、模型の脊椎関節であり、前記球面で接する両側の部分は、ともに椎骨であり、関節が真っ直ぐの状態で、前記挿通保持孔が形成される前記球面の凹側での一部は、この凹側球面の中心であり、前記挿通保持孔が形成される前記球面の凸側での球面から等距離中心部は、この凸側球面に形成される略円錐状の空間の奥側頂部に位置することを特徴とする関節構造である。
【発明の効果】
【0008】
特許文献1、2の関節の構造では、関節の角度によって弾性線材の長さが変化してしまう構造になっているので、弾性線材の長さが短くなる角度に自然に変化してしまい、よって設定角度が保持でき難いものであった。
【0009】
これに対し、第一、又は第二発明によれば、弾性線材が全径方向に保持される挿通保持孔が、接する球面の凹側の1部と、接する球面の凸側で球面から等距離中心部と、に形成されているので、関節の角度が変化しても弾性線材の長さはほぼ同じである。よって、弾性線材の長さが短くなる角度に自然に変化してしまうことがない。したがって設定角度が保持でき易い。このため、角度を維持するに摩擦を大きくする必要がなく、小さな摩擦で角度を滑らかに変化させやすい。
【0010】
第二発明によれば、さらに、関節が真っ直ぐの状態で、挿通保持孔が形成される球面の凹側での一部は、この凹側球面の中心であることから、関節が真っ直ぐの状態から全ての角度に均等に変化し易く、よって脊椎関節に適する。また、挿通保持孔が形成される球面の凸側での球面から等距離中心部は、この凸側球面に形成される略円錐状の空間の奥側頂部に位置することにより、この略円錐状の空間でのみ弾性線材が動くことができ、よってこの略円錐状の角度により脊椎関節の可動範囲を設定し易い。
【発明を実施するための最良の形態】
【0011】
この発明の実施形態を、図1から図3に示す。
図2に示すように、この実施形態は、恐竜の骨格の模型1に採用され、特に、脊椎関節3に適用されている。脊椎は、複数の椎骨5が直列に接している。脊椎関節3は、隣り合う椎骨5が球面7で接する。この球面7は、関節の可動範囲で形成され、よって、完全な球の一部のみをなす。
【0012】
この隣り合う椎骨5が接する部分の中央を弾性線材9により挿通させる。弾性線材9は、この実施形態では、細い径のゴム紐、または径の小さなコイルバネ、あるいはコイルバネに直列接続される紐(図2参照)またはワイヤーが使用可能である。
弾性線材9は、図2のように、多数個の椎骨5を挿通されて、最両端が椎骨5、または椎骨5に接する他の骨11に係止される。あるいは、図3(D)(E)のように、より少ない数個の椎骨5を挿通されて、両端が椎骨5に係止される。さらには、あるいは、図1のように、2個の椎骨5を挿通されて、両端が椎骨5に係止される。このような弾性線材9の働きで、接する椎骨5は、互いに引っ張られ押圧される。
【0013】
図1(A)に示すように、椎骨5には、弾性線材9の動きを規制するための構造が形成される。すなわち、弾性線材9が挿通される小さな径の挿通保持孔13が、椎骨5の中央に形成される。この挿通保持孔13の径は、弾性線材9の径とほぼ同じであり、よって、挿通された弾性線材9は、全ての半径方向、つまり全径方向に保持され、半径方向の動きが規制される。
【0014】
さらに、この挿通保持孔13が形成される位置は、接する球面7の凹側と凸側の2箇所である。すなわち、関節が真っ直ぐの状態で、凹側では、この凹側球面15の中心部16である。凸側では、凸側球面17からの等距離中心部19である。この等距離中心部19は、凸側球面17に形成されて奥側が細くテーパー状になる略円錐状21の空間において、奥側頂部に位置する。
【0015】
「実施形態の効果」
まず、特許文献1の図6、図7に示される人形の膝関節のように、あるいは特許文献2の図1に示される人形の肩関節や股関節のように、弾性線材9が全径方向に保持される挿通保持孔13が設けられておらず大きな空洞を有する場合を図1(D)に示す。このような関節の構造では、関節の角度によって、弾性線材9の関節に対する位置が変化し、その結果、弾性線材9の長さが変化してしまう。
【0016】
すなわち、図中の点線の状態よりも実線の状態のほうが短い。このため、希望する角度、例えば真っ直ぐの状態に関節を設定しても、弾性線材9の長さが短くなる角度、すなわち曲がった実線の状態に自然に変化してしまい、よって設定角度が保持でき難いものであった。
【0017】
これに対し、この実施形態によれば、弾性線材9を全径方向に保持する小さな径の挿通保持孔13が、凹側球面15の中心と、凸側球面17からの等距離中心部19とに形成されているので、弾性線材9の半径方向の動きは規制される。このため、関節の角度が変化しても(図1(B)(C))、弾性線材9の関節に対する位置は変化せず、よって弾性線材9の長さは真っ直ぐな状態(図1(A))とほぼ同じである。このため、弾性線材9の長さが短くなる角度に自然に変化してしまうことがない。
【0018】
したがって設定角度が保持でき易い。このため、角度を維持するに摩擦を大きくする必要がなく、小さな摩擦で角度を滑らかに変化させやすい。
さらに、関節が真っ直ぐの状態で、挿通保持孔13が形成される球面7の凹側での一部は、この凹側球面15の中心であること、また、挿通保持孔13が形成される球面7の凸側での球面7から等距離中心部19は、この凸側球面17に形成される略円錐状21の空間の奥側頂部に位置することにより、関節が真っ直ぐの状態から全ての角度に均等に変化し易く、よって脊椎関節3に適する。
【0019】
また、挿通保持孔13が略円錐状21の空間の奥側頂部に位置することにより、この略円錐状21の空間でのみ弾性線材9が動くことができ、よってこの略円錐状21の角度により脊椎関節3の可動範囲を設定し易い。すなわち可動範囲が広い関節、狭い関節を、容易に自在に設定できる。
【0020】
「他の実施形態」
以上の実施形態では、恐竜の骨格の模型1で特に脊椎関節3に実施されたものであったが、他の実施形態では、人形、ロボット、あるいは動物や恐竜などの模型、あるいはこれらの玩具などの関節で、脊椎関節3のみならず、腕や脚の関節にも実施できる。
【図面の簡単な説明】
【0021】
【図1】この発明の実施形態にかかる関節構造の作用効果を、脊椎関節の椎骨が2個の場合に示す断面図で、(A)は関節が真っ直ぐの状態を示す図、(B)および(C)は関節がある角度になった状態を示す図、(D)は弾性線材が全径方向に保持される挿通保持孔が設けられていない場合の図、である。
【図2】この発明の一実施形態にかかる関節構造を採用した脊椎を断面で示した恐竜の全身骨格の模型図である。
【図3】(A)は図2の脊椎の一部の外観を側方から見た図、(B)は(A)の脊椎を構成する一個の椎骨の外観を側方から見た図、(C)は(B)の断面図、(D)は(C)の椎骨を数個直列に接し弾性線材が挿通された状態を示す図、(E)は(D)の各間接の角度を変えた動作図である。
【符号の説明】
【0022】
1…恐竜の骨格の模型、3…脊椎関節、5…椎骨、7…球面、9…弾性線材、11…他の骨、13…挿通保持孔、15…凹側球面、16・・凹側球面の中心部、17…凸側球面、19…等距離中心部、21…略円錐状。
【特許請求の範囲】
【請求項1】
球面で接し、接する両側の部分を、中央を挿通させる弾性線材により互いに押圧する関節において、前記挿通された弾性線材が全径方向に保持される挿通保持孔が、前記球面の凹側の1部と、前記球面の凸側で球面から等距離中心部と、に形成されたことを特徴とする関節構造。
【請求項2】
前記関節は、模型の脊椎関節であり、前記球面で接する両側の部分は、ともに椎骨であり、関節が真っ直ぐの状態で、前記挿通保持孔が形成される前記球面の凹側での一部は、この凹側球面の中心であり、前記挿通保持孔が形成される前記球面の凸側での球面から等距離中心部は、この凸側球面に形成される略円錐状の空間の奥側頂部に位置することを特徴とする関節構造。
【請求項1】
球面で接し、接する両側の部分を、中央を挿通させる弾性線材により互いに押圧する関節において、前記挿通された弾性線材が全径方向に保持される挿通保持孔が、前記球面の凹側の1部と、前記球面の凸側で球面から等距離中心部と、に形成されたことを特徴とする関節構造。
【請求項2】
前記関節は、模型の脊椎関節であり、前記球面で接する両側の部分は、ともに椎骨であり、関節が真っ直ぐの状態で、前記挿通保持孔が形成される前記球面の凹側での一部は、この凹側球面の中心であり、前記挿通保持孔が形成される前記球面の凸側での球面から等距離中心部は、この凸側球面に形成される略円錐状の空間の奥側頂部に位置することを特徴とする関節構造。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2009−233287(P2009−233287A)
【公開日】平成21年10月15日(2009.10.15)
【国際特許分類】
【出願番号】特願2008−86699(P2008−86699)
【出願日】平成20年3月28日(2008.3.28)
【出願人】(504219193)
【Fターム(参考)】
【公開日】平成21年10月15日(2009.10.15)
【国際特許分類】
【出願日】平成20年3月28日(2008.3.28)
【出願人】(504219193)
【Fターム(参考)】
[ Back to top ]