
関節運動するツールアセンブリを備えた外科用器具
【課題】関節運動先端部の運動のより広い範囲を提供し得る関節機構を含む関節運動する外科用機器を提供する。
【解決手段】ハンドル部分510、本体部分512、関節運動ツールアセンブリ17および関節機構を含む外科用ステープル留め器具が開示される。本体部分512はハンドル部分510から遠位方向に延びる。関節機構は、ツールアセンブリ17を関節運動するための関節リンク、インターフェース部材を回転するための関節ノブ、このインターフェース部材に作動可能に連結される近位端にあるスリットを有する関節リンクを含み、ここで、この回転ノブの回転運動が、第1および第2の関節リンクの軸方向運動に変換され、それによって関節運動ツールアセンブリ17を関節運動する。
【解決手段】ハンドル部分510、本体部分512、関節運動ツールアセンブリ17および関節機構を含む外科用ステープル留め器具が開示される。本体部分512はハンドル部分510から遠位方向に延びる。関節機構は、ツールアセンブリ17を関節運動するための関節リンク、インターフェース部材を回転するための関節ノブ、このインターフェース部材に作動可能に連結される近位端にあるスリットを有する関節リンクを含み、ここで、この回転ノブの回転運動が、第1および第2の関節リンクの軸方向運動に変換され、それによって関節運動ツールアセンブリ17を関節運動する。
【発明の詳細な説明】
【技術分野】
【0001】
(技術分野)
本開示は、関節運動するツールアセンブリを有する外科用器具に関する。より詳細には、本開示は、関節運動する外科用器具、例えば、直線状のステープラを非関節運動位置から作動するための機構を含む外科用器具に関する。
【背景技術】
【0002】
(背景)
関節運動のための外科用器具の本体部分の遠位端上に取り付けられたツールアセンブリを含む外科用器具は周知である。代表的には、このような外科用器具は、操作者が外科用器具の本体部分に対して上記ツールアセンブリを遠隔から関節運動することを可能にし、操作者が組織により容易に接近し、手術し、そして/または操作することを可能にする関節運動制御機構を含む。
【0003】
このような関節運動ツールアセンブリは、特に内視鏡外科的手順で所望されるようになった。内視鏡外科的手順では、外科用器具の遠位端は、身体中の小切開を通って挿入され、手術部位に接近する。代表的には、適切なサイズ、例えば、5mm、10mmなどのカニューレが、この身体切開を通って挿入され、手術部位に接近するための案内チャネルを提供する。小さな身体切開、すなわち、患者に対するより小さな瘢痕の低減された外傷、より迅速な治癒時間を提供することが所望されるので、外科用器具とカニューレの内径との間の許容誤差は小さい。
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の関節運動ツールの先端部は、主に関節運動機構の機械的設計の制限に起因して、限られた範囲の運動を有する。この関節運動先端部の運動のより広い範囲を提供し得る関節機構を含む関節運動する外科用機器を提供することが所望される。
【課題を解決するための手段】
【0005】
上記課題を解決するために、本発明は、例えば、以下を提供する。
(項目1)外科用器具であって:
ハンドル部分;
該ハンドル部分から遠位方向に延び、そして第1の長軸方向軸を規定する本体部分;
第2の長軸方向軸を規定し、そして近位端を有する関節運動ツールアセンブリであって、該本体部分の遠位端に配置され、そして該第2の長軸方向軸が該第1の長軸方向軸と実質的に整列される第1の位置から、少なくとも該第2の軸が該第1の軸に対して所定の角度で配置される第2の位置まで移動可能である関節運動ツールアセンブリ;および
該ツールアセンブリを関節運動するための関節リンク、インターフェース部材を回転するための関節ノブを含む関節機構を備え、該関節リンクが該インターフェース部材に作動可能に連結された近位端にスリットを有し、ここで、該関節ノブの回転運動が第1の関節リンクおよび第2の関節リンクの軸方向運動に変換され、それによって、該関節運動ツールアセンブリを関節運動する、外科用器具。
(項目2)前記関節機構が関節スピンドルを受容するような形態のハウジングブロックをさらに含み、該関節スピンドルが前記関節ノブにそれとともに回転するように取り付けられる、項目1に記載の外科用器具。
(項目3)前記ハウジングブロックおよび前記関節スピンドルが、該関節スピンドルの回転範囲を制限するように適合される、項目2に記載の外科用器具。
(項目4)前記ハウジングブロックが、実質的に弧形状を備えたチャネルを有し、該チャネルが前記関節スピンドル上の部材を受容する、項目3に記載の外科用器具。
(項目5)前記チャネルの長さが、前記関節運動ツールの先端部の最大の所望関節に対応する、項目4に記載の外科用器具。
(項目6)前記関節スピンドルが、所定の増分で回転するような形態である、項目2に記載の外科用器具。
(項目7)前記関節スピンドルが複数のノッチを規定し、該複数のノッチが該関節スピンドルを係合するために付勢されるプランジャーと機械的にインターフェースするような形態である、項目6に記載の外科用器具。
(項目8)前記複数のノッチの各々が、前記関節運動ツールアセンブリの関節位置とともに前記関節スピンドルの回転位置を指示する、項目7に記載の外科用器具。
(項目9)前記ノッチの少なくとも1つが、前記関節運動ツールアセンブリの中立の軸平面位置と対応する、項目8に記載の外科用器具。
(項目10)前記ノッチの2つが、前記関節運動ツールアセンブリの最大関節運動位置に対応する、項目6に記載の外科用器具。
(項目11)前記関節運動ツールアセンブリが、使い捨て装填ユニットのパーツである、項目1に記載の外科用器具。
(項目12)前記関節運動ツールアセンブリが、カートリッジアセンブリおよびアンビルアセンブリを含む、項目1に記載の外科用器具。
(項目13)前記本体部分内に位置決めされ、そして前記関節機構と作動可能に連結される感知機構をさらに備え、該感知機構が該本体部分と係合される使い捨てタイプの装填ユニットを感知するための感知キャップを含む、項目1に記載の外科用器具。
(項目14)前記感知キャップが細長い前記本体内に位置決めされ、そして関節運動しない使い捨て装填ユニットの該本体部分との係合に応答する第1の位置に、関節運動する使い捨てユニットの係合の該本体部分との係合に応答する第2の位置に移動可能である、項目13に記載の外科用器具。
(項目15)前記第1の位置で、前記感知機構が前記関節機構と作動可能に係合され、前記関節ノブの移動を防ぐ、項目14に記載の外科用器具。
(項目16)外科用ステープル留め装置であって:
移動可能なハンドルを含むハンドル部分であって、該移動可能なハンドルが作動ストロークを通って移動可能であるハンドル部分;
該ハンドル部分から遠位方向に延び、そして第1の長軸方向軸を規定する本体部分;および
該本体部分の遠位端との離脱可能な係合のための形態である使い捨て可能な装填ユニットであって、そして:
近位本体部分;および
第2の長軸方向軸を規定し、そして近位端を有する関節運動ツールアセンブリであって、該本体部分の遠位端に配置され、そして該第2の長軸方向軸が該第1の長軸方向軸と実質的に整列される第1の位置から、少なくとも該第2の軸が該第1の長軸方向軸に対して所定の角度で配置される第2の位置まで移動可能である関節運動ツールアセンブリ;および
該ツールアセンブリを関節運動するための関節リンク、インターフェース部材を回転するための関節ノブを含む関節機構を備え、該関節リンクが該インターフェース部材に作動可能に連結された近位端にスリットを有し、ここで、該関節ノブの回転運動が第1の関節リンクおよび第2の関節リンクの軸方向運動に変換され、それによって、該関節運動アセンブリを関節運動する関節運動ツールアセンブリを含む使い捨て可能な装填ユニット、を備える、外科用ステープル留め装置。
(項目17)前記関節機構が、関節スピンドルを受容するような形態であるハウジングブロックをさらに含み、該関節スピンドルが、該関節ノブにそれとともに回転するように取り付けられる、項目16に記載の外科用ステープル留め装置。
(項目18)前記ハウジングブロックおよび関節スピンドルが、該関節スピンドルの回転範囲を制限するように適合される、項目17に記載の外科用ステープル留め装置。
(項目19)前記ハウジングブロックが実質的に弧形状を備えたチャネルを有し、該チャネルが前記関節スピンドル上の部材を受容する、項目18に記載の外科用ステープル留め装置。
(項目20)前記チャネルの長さが、前記関節運動ツールの先端部の最大の所望関節に対応する、項目19に記載の外科用ステープル留め装置。
(項目21)前記関節スピンドルが、所定の増分で回転するような形態である、項目17に記載の外科用ステープル留め装置。
(項目22)前記関節スピンドルが複数のノッチを規定し、該複数のノッチが該関節スピンドルを係合するために付勢されるプランジャーと機械的にインターフェースするような形態である、項目21に記載の外科用ステープル留め装置。
(項目23)前記複数のノッチの各々が、前記関節運動ツールアセンブリの関節位置とともに前記関節スピンドルの回転位置を指示する、項目22に記載の外科用ステープル留め装置。
(項目24)前記ノッチの少なくとも1つが、前記関節運動ツールアセンブリの中立の軸平面位置と対応する、項目23に記載の外科用ステープル留め装置。
(項目25)前記ノッチの2つが、前記関節運動ツールアセンブリの最大関節運動位置に対応する、項目21に記載の外科用ステープル留め装置。
(項目26)前記関節運動ツールアセンブリが、カートリッジアセンブリおよびアンビルアセンブリを含む、項目16に記載の外科用ステープル留め装置。
(項目27)前記本体部分内に位置決めされ、そして前記関節機構と作動可能に連結される感知機構をさらに備え、該感知機構が該本体部分と係合される使い捨てタイプの装填ユニットを感知するための感知キャップを含む、項目16に記載の外科用ステープル留め装置。
(項目28)前記感知キャップが細長い前記本体内に移動可能に位置決めされ、そして関節運動しない使い捨て装填ユニットの該本体部分との係合に応答する第1の位置に、関節運動する使い捨てユニットの該本体部分との係合に応答する第2の位置に移動可能である、項目27に記載の外科用ステープル留め装置。
(項目29)前記第1の位置で、前記感知機構が前記関節機構と作動可能に係合され、前記関節ノブの移動を防ぐ、項目28に記載の外科用ステープル留め装置。
【0006】
ハンドル部分、本体部分、関節運動ツールアセンブリおよび関節機構を含む外科用ステープル留め器具が開示される。本体部分はハンドル部分から遠位方向に延びる。関節機構は、上記ツールアセンブリを関節運動するための関節リンク、インターフェース部材を回転するための関節ノブ、このインターフェース部材に作動可能に連結される近位端にあるスリットを有する関節リンクを含み、ここで、この回転ノブの回転運動が、第1および第2の関節リンクの軸方向運動に変換され、それによって上記関節運動ツールアセンブリを関節運動する。
【0007】
本開示は、ハンドル部分、本体部分、関節運動ツールアセンブリおよび少なくとも1つのカップリング部材を含む外科用器具に関する。この本体部分は、ハンドル部分から遠位方向に延び、そして第1の長軸方向軸を規定する。上記関節運動ツールアセンブリは、第2の長軸方向軸を規定し、そして上記本体部分の遠位端に配置される。この関節運動ツールアセンブリは、上記第2の長軸方向軸が上記第1の長軸方向軸と実質的に整列される第1の位置から、少なくとも上記第2の軸が上記第1の軸に対して所定の角度で配置される第2の位置まで移動可能である。上記関節運動ツールアセンブリはまた、第1の関節運動リンクを含む。関節機構は、第2の関節リンク、上記ハンドル部分に隣接して取り付けられ、そして関節スピンドルと機械的にインターフェースする関節ノブを含む。この第2の関節リンクは、その近位端で関節ノブに作動可能に、そして遠位端で第1の関節リンクに作動可能に連結され、この関節ノブの回転運動が上記第1および第2の関節リンクの側方移動に変換され、それによって上記関節運動ツールアセンブリを関節運動する。
【0008】
本開示はまた、外科用ステープル留め装置に関する。この外科用ステープル留め装置は、移動可能なハンドルを含むハンドル部分を含み、この移動可能なハンドルは、作動ストロークを通って移動可能である。この外科用装置はまた、このハンドル部分から遠位方向に延び、そして第1の長軸方向軸を規定する本体部分、およびこの本体部分の遠位端との離脱可能な係合のための形態である使い捨て可能な装填ユニットを含む。この使い捨て可能な装填ユニットは、近位本体部分、および第2の長軸方向軸を規定する関節運動ツールアセンブリを含む。この関節運動ツールアセンブリは、上記近位本体部分の遠位端に隣接して配置され、そして上記第2の長軸方向軸が上記第1の長軸方向軸と実質的に整列される第1の位置から、少なくとも上記第2の軸が上記第1の長軸方向軸に対して所定の角度で配置される第2の位置まで移動可能である。上記装置はさらに、第2の関節リンク、上記ハンドル部分に隣接して取り付けられ、そして関節スピンドルと機械的にインターフェースする関節ノブを含み、この第2の関節リンクは、この関節ノブと作動可能に連結される近位端、および上記本体部分の遠位端に隣接して位置決めされ、そして上記第1の関節リンクに作動可能に連結される遠位端を有し、ここで、上記関節ノブの回転運動は、上記第1および第2の関節リンクの側方運動に変換され、それによって、上記関節運動ツールアセンブリを関節運動する。
【0009】
本開示また、外科用器具との離脱可能な係合のための形態である使い捨て可能な装填ユニットに関する。この使い捨て可能な装填ユニットは、本体部分、関節運動ツールアセンブリおよび少なくとも1つのカップリング部材を含む。
【発明の効果】
【0010】
本発明により、関節運動先端部の運動のより広い範囲を提供し得る関節機構を含む関節運動する外科用機器を提供することができる。
【図面の簡単な説明】
【0011】
本明細書によって開示される外科用器具の種々の実施形態は、本明細書で図面を参照して開示される。
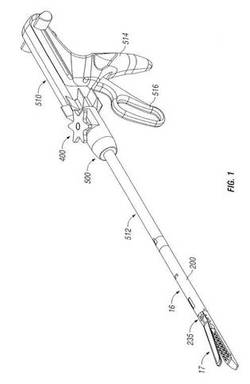
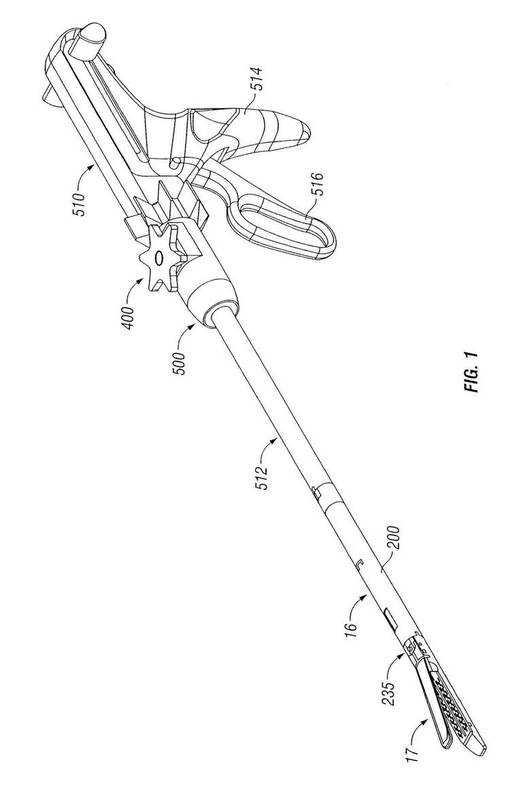
【図1】図1は、関節運動ツールアセンブリを備えた本明細書に開示される外科用器具の1つの実施形態の遠位端からの側方斜視図である。
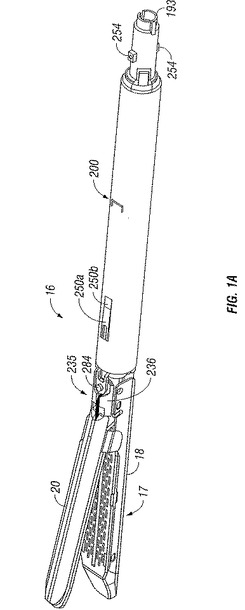
【図1A】図1Aは、上記ツールアセンブリを含む図1に示される外科用器具の使い捨て可能な装填ユニット(DLU)の近位端から側方斜視図である。
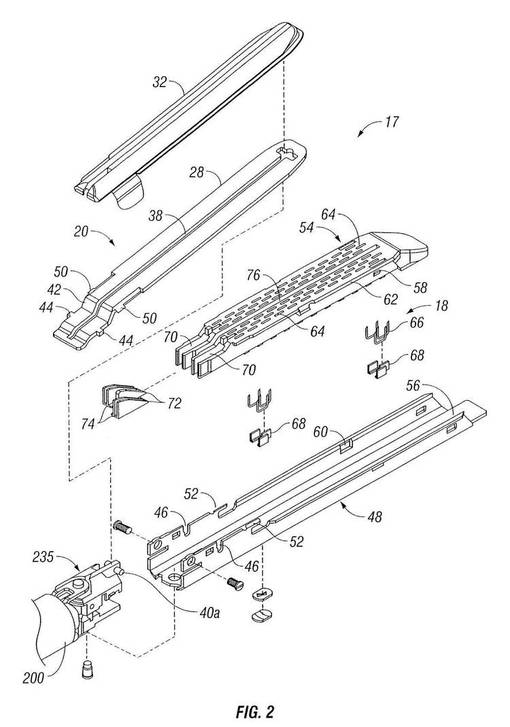
【図2】図2は、図1に示される外科用器具のDLUのパーツを分離した、取り付けアセンブリおよびツールアセンブリの遠位端の側方斜視図である。
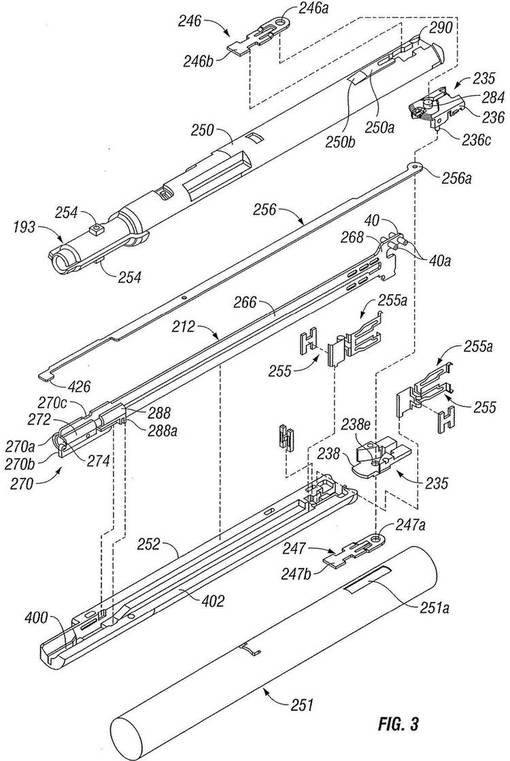
【図3】図3は、取り付けアセンブリ、およびパーツが分離された図1Aに示されるDLUの近位本体部分の斜視図である。
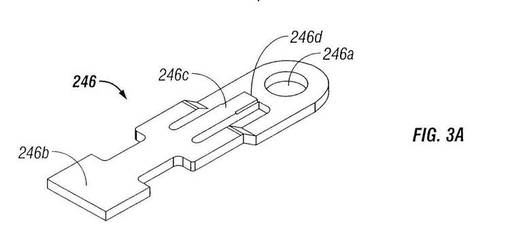
【図3A】図3Aは、図1に示される外科用器具のカップリング部材および保持具部材の側方斜視図である。
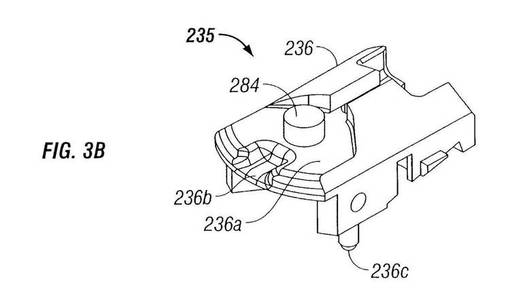
【図3B】図3Bは、図1に示される外科用器具のDLUの取り付けアセンブリの上部取り付け部分の側方斜視図である。
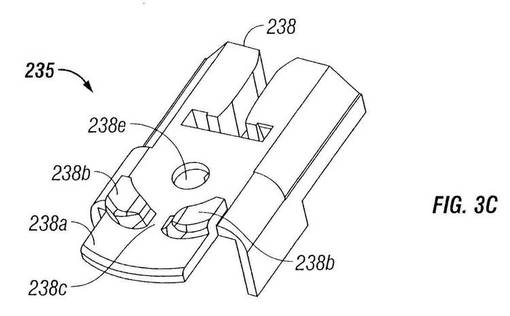
【図3C】図3Cは、図1に示される外科用器具のDLUの取り付けアセンブリの下部取り付け部分の側方斜視図である。
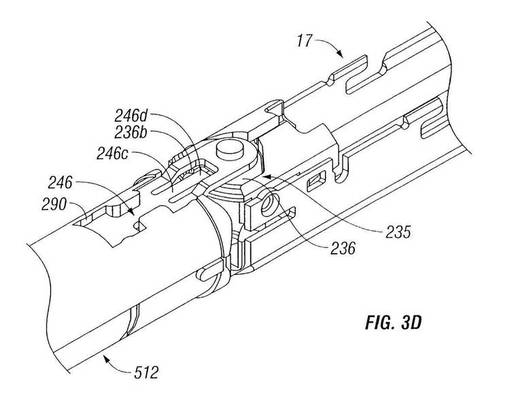
【図3D】図3Dは、近位本体部分、取り付けアセンブリ、およびツールアセンブリが関節運動しない位置にある外科用器具のDLUのツールアセンブリの近位端の上からの側方斜視図である。
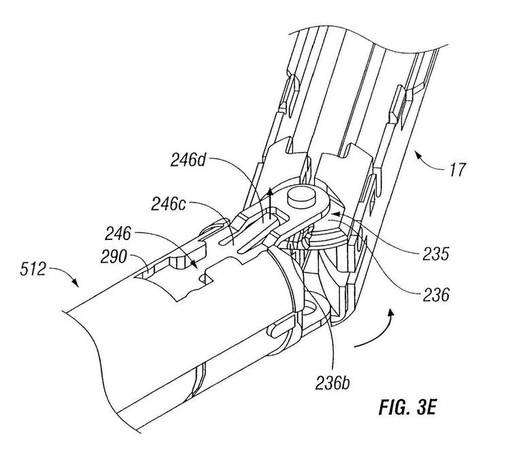
【図3E】図3Eは、近位本体部分、取り付けアセンブリ、および関節運動された位置まで移動する図3Dに示されるツールアセンブリの近位端の上からの側方斜視図である。
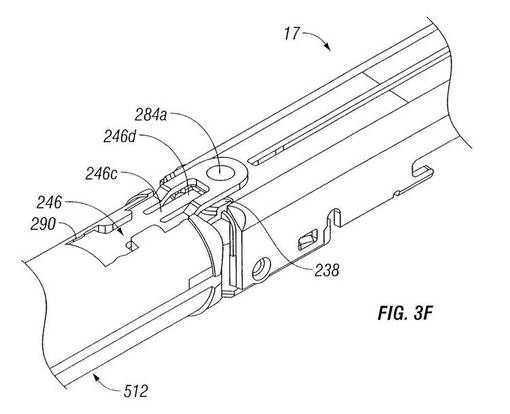
【図3F】図3Fは、近位本体部分の遠位端、取り付けアセンブリ、およびツールアセンブリが関節運動しない位置にある外科用器具のDLUのツールアセンブリの近位端の下からの側方斜視図である。
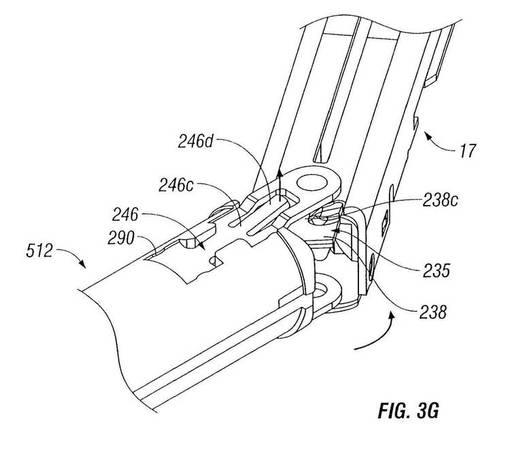
【図3G】図3Gは、近位本体部分の遠位端、取り付けアセンブリ、および関節運動された位置まで移動する図3Fに示されるツールアセンブリの近位端の下からの側方斜視図である。
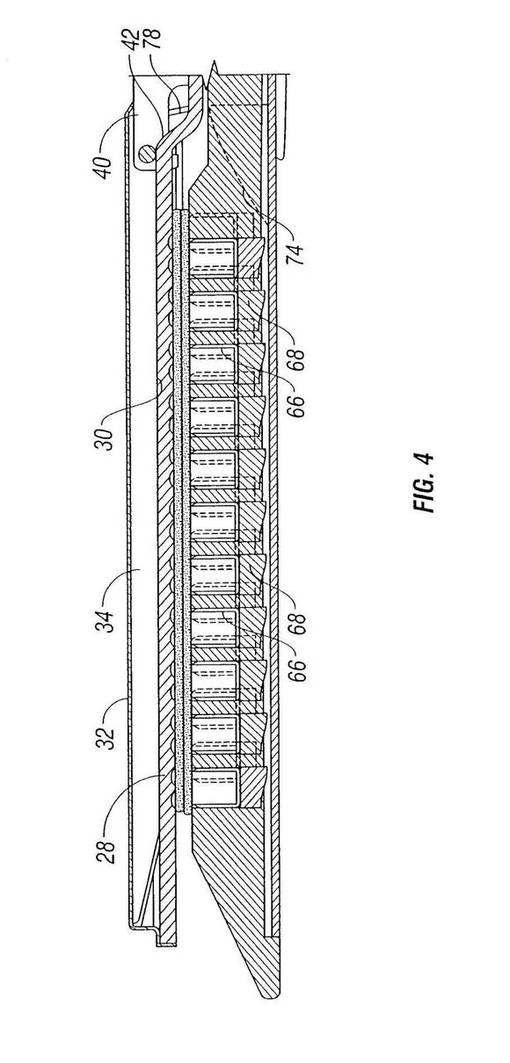
【図4】図4は、図1Aに示されるDLUのツールアセンブリの側方断面図である。
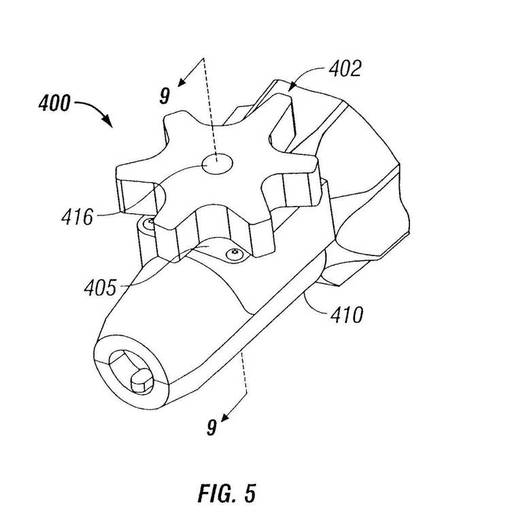
【図5】図5は、本開示に従う、図1に示される外科用器具の関節機構の側方斜視図である。
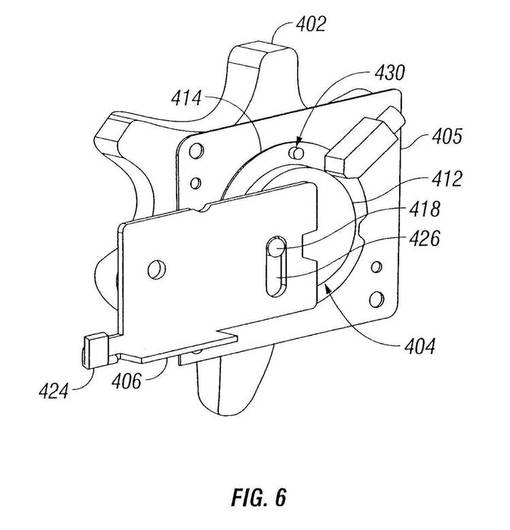
【図6】図6は、本開示に従う、図5の関節機構の内部の側方斜視図である。
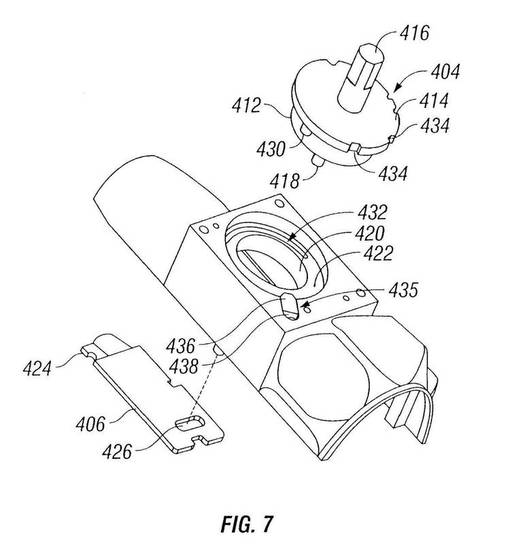
【図7】図7は、本開示に従う、図5の関節機構の分離したパーツの斜視図である。
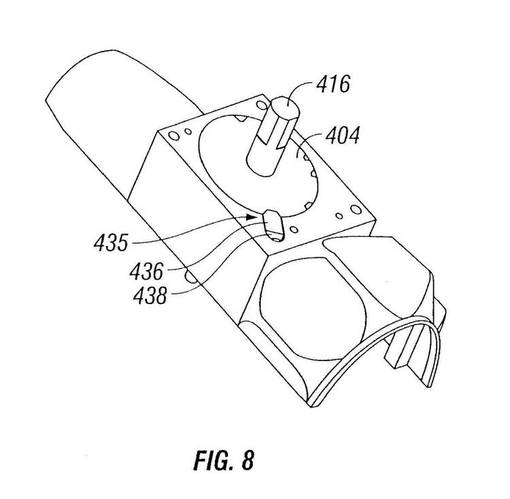
【図8】図8は、本開示に従う、図5の関節機構のアセンブルされたパーツの外部からの斜視図である。
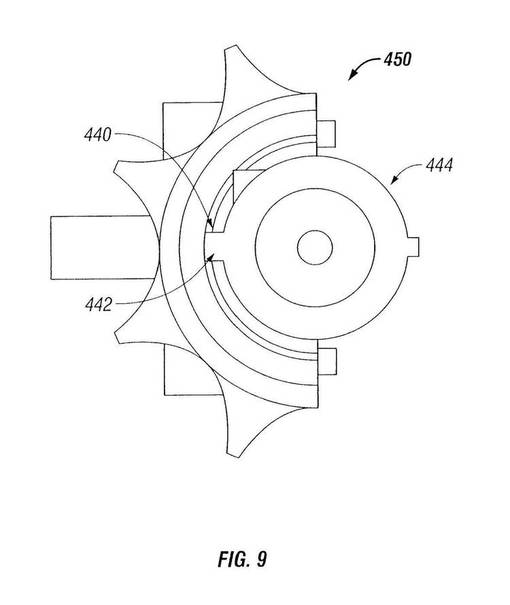
【図9】図9は、図5の断面線9−9に沿ってとった断面図である。
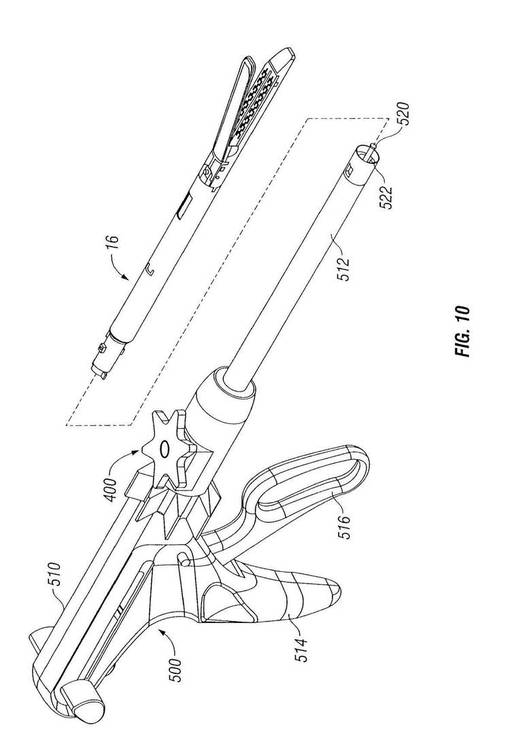
【図10】図10は、DLU、および外科用器具へのDLUの取り付けの前の図1に示される外科用器具の側方斜視図である。
【発明を実施するための形態】
【0012】
(実施形態の詳細な説明)
本明細書に開示される外科用器具および使い捨て可能な装填ユニットの実施形態は、ここで、図面を参照して詳細に説明され、図面では、同様の参照番号は、いくつかの図面の各々で同一または対応する要素を指定する。
【0013】
図1を参照して、外科用器具500は、ハンドル部分510、本体部分512、および使い捨て可能な装填ユニット(「DLU」)16を含む。ハンドル部分510は、静止ハンドル514、および移動可能なハンドルまたはトリガー516を含む。移動可能なハンドル516は、静止ハンドル514に対して移動可能であり、本体部分512の遠位端から突出する制御ロッド520を進行する(図10)。ハンドル部分510および本体部分512は、「外科用ステープル留め装置」と題する共有にかかる米国特許第6,330,965号に開示される様式で構築され得、その開示は本明細書によって参考として本明細書中に援用される。あるいは、その他の外科用器具がDLU16とともに用いられ得、内視鏡手順を実施する。この外科用器具500はまた、DLU16のツールアセンブリ17を関節運動するための関節機構400を含む。
【0014】
図1および1Aを参照して、簡単に述べれば、DLU16は、ツールアセンブリ17、近位本体部分200および取り付けアセンブリ235を含む。本体部分200は、以下に詳細に論議される様式で外科用器具500の遠位端を離脱可能に係合するよう適合された近位端を有する(図10)。取り付けアセンブリ235は、本体部分200の遠位端に旋回可能に固定され、そしてツールアセンブリ17の近位端に固定して取り付けられる。本体部分200の長軸方向軸に垂直な軸の周りの取り付けアセンブリ235の旋回移動は、ツールアセンブリ17の長軸方向軸が本体部分200の長軸方向軸と整列される関節運動しない位置と、ツールアセンブリ17の長軸方向軸が本体部分200の長軸方向軸に対して所定の角度で配置される関節運動した位置との間でツールアセンブリ17の関節運動を行う。
【0015】
図2〜4をまた参照して、ツールアセンブリ17は、カートリッジアセンブリ18およびアンビルアセンブリ20を含む。アンビルアセンブリ20は、複数のステープル変形凹面30を有するアンビル部分28、およびアンビル部分28の上面に固定されたカバープレート32を含む。カバープレート32およびアンビル部分28は、それらの間に腔34を規定し(図4)、これは、駆動アセンブリ212の遠位端を受容するような寸法である(図3)。カバープレート32は、駆動アセンブリ212の遠位端を取り囲み、DLU16の関節運動の間に組織を挟むことを防ぐ。長軸方向スロット38は、アンビル部分28を通って延び、駆動アセンブリ212の保持フランジ40の通過を容易にする。アンビル部分28上に形成されたカム運動面42は、駆動アセンブリ212の保持フランジ40上に支持された一対のカム部材40aを係合するように位置決めされ、アンビルアセンブリおよびカートリッジアセンブリの接近を行う。アンビル部分28上に形成された一対の旋回部材44は、カートリッジアセンブリキャリア48中に形成されたスロット46内に位置決めされ、アンビル部分28をその間隔を置き、そして接近された位置の間に案内する。一対の安定化部材50は、キャリア48上に形成された個々のショルダー52を係合し、カム運動面42が旋回部材44の周りで旋回されるとき、アンビル部分28がステープルカートリッジ54に対して軸方向にスライドすることを防ぐ。
【0016】
カートリッジアセンブリ18は、ステープルカートリッジ54を受容するような寸法および形態である細長い支持チャネル56を規定するキャリア48を含む。ステープルカートリッジ54および細長い支持チャネル56に沿ってそれぞれ形成された対応するタブ58およびスロット60は、支持チャネル56内の固定された位置にステープルカートリッジ54を保持するように機能する。ステープルカートリッジ54上に形成された一対の支持支柱62は、キャリア48の側壁上に静止するように位置決めされ、支持チャネル56内でステープルカートリッジ54をさらに安定化する。
【0017】
ステープルカートリッジ54は、複数のステープルまたはファスナー66およびプッシャー68を受容するための保持スロット64(図2)を含む。複数の側方に間隔を置いて離れた長軸方向スロット70がステープルカートリッジ54を通って延び、作動スレッド74の直立するカムウェッジ72を収容する(図2)。中央の長軸方向スロット76は、ステープルカートリッジ54の実質的長さに沿って延び、ナイフブレード78の通過を容易にする(図4)。外科用ステープラ10の作動の間に、駆動アセンブリ212は作動スレッド74に接し、そして作動スレッド74をステープルカートリッジ54の長軸方向スロット70を通って押し、カムウェッジ72をプッシャー68との逐次的接触に進行させる。プッシャー68は、ファスナー保持スロット64内でカムウェッジ72に沿って垂直に移動し、そしてファスナー66を、保持スロット64からアンビルアセンブリ20のステープル変形腔30に押す(図4)。
【0018】
図3を参照して、取り付けアセンブリ235は、上部取り付け部分236および下部取り付け部分238を含む。中央に位置される旋回部材284は、カップリング部材246中に形成された個々の開口部246aを通って上部取り付け部分236から延びる。下部取り付け部分238は、旋回部材284aを受容するためのボア238eを含む(図3F)。旋回部材284aは、ボア238eおよび第2のカップリング部材246を通って延びる。カップリング部材246および247の各々は、上部および下部ハウジング半分体250および252から形成される内部ハウジングの遠位端に形成される溝290中に受容されるような形態である相互ロックする近位部分246b、247bを含む。カップリング部材246、247は、取り付けアセンブリ235、ならびに上部および下部ハウジング半分体250および252を互いに対して長軸方向で固定された位置に保持し、その一方、それに対する取り付けアセンブリ235の旋回移動を可能にする。
【0019】
図3A〜3Cを参照して、各カップリング部材246、247は、取り付けアセンブリ235を係合するように位置決めされる遠位端246dを有する片持ちスプリングアーム246c、247cを含む。より詳細には、上部取り付け部分236は、カップリング部材246のスプリングアーム246cの遠位端246dを受容するような寸法の窪み236bを含む上面236aを含む。下部取り付け部分238は、カップリング部材247のスプリングアーム247cを受容するための寸法である窪み238cを規定する一対の高くなった面238bを有する底面238aを含む。あるいは、1つ以上の窪みがツールアセンブリ17の上部および下部取り付け部分中に形成され得るか、または窪みが上部および下部取り付け部分のいずれかの上に形成され得る。
【0020】
図3D〜3Gに示されるように、カップリング部材246のスプリングアーム246cの遠位端246dが上部取り付け部分236の窪み236b中に位置決めされるとき、スプリングアーム246cは、取り付けアセンブリ235を非関節運動位置に保持する。スプリングアーム246cは、取り付けアセンブリ235を、窪み236bからスプリングアーム246cを曲げるために十分な所定の力が付与されて取り付けアセンブリ235およびツールアセンブリ17の関節運動を行うまで、その非関節運動位置に保持する。スプリングアーム247cは、窪み238c中に同様に保持され、取り付けアセンブリ235の位置を保持する。所定の力が取り付けアセンブリ235およびツールアセンブリ17に付与されるとき、スプリングアーム246c、247cは、図3Eおよび3G中に示されるように、窪み236bおよび238cから外方に跳ね、DLU16の近位本体部分200の遠位端に対して取り付けアセンブリ235(そしてそれ故、ツールアセンブリ17)の旋回移動を許容する。
【0021】
上記で論議されたようにスプリングアーム246c、247cならびに窪み236bおよび238cは、ツールアセンブリ17を、所定の力が取り付けアセンブリ235に付与され、スプリングアーム246c、247cを取り付けアセンブリ235の窪み236bおよび238cから解放までその非関節運動位置に維持する。スプリングアーム/窪みが、ステープラ、把持器(グラスパー)(図3Hを参照のこと)、動力を与えられたシールデバイス、例えば、RFシールデバイスなどを含む任意の関節運動外科用デバイスに組み込まれ得ることが想定される。さらに、2つのスプリングアーム/窪みが示されているけれども、単一のスプリングアームが提供され得る。さらに、この関節運動アセンブリはDLUのパーツにとっては必要なく、むしろ外科用器具の遠位端上に直接指示され得る。例えば、取り付けアセンブリは、ツールアセンブリに取り外し可能または取り外し不能に固定され得、そして外科用器具の遠位端に直接固定される。
【0022】
図3を参照して、上部ハウジング半分体250および下部ハウジング半分体252は、本体部分200の外側スリーブ251内に含まれる。本体部分251は、上部ハウジング半分体250上に形成されたボスまたは突出部250aを受容するような寸法の切り抜き251aを含む。この切り抜き251a内の突出部250aの位置決めは、本体部分200の外側スリーブ251内で上部ハウジング半分体250および下部ハウジング半分体252の軸方向および回転移動を防ぐ。1つの実施形態では、ボス250aは、側方寸法より大きな軸方向寸法を有する実質的に矩形の形態を有する。より大きな軸方向寸法は、スリーブ251内で上部ハウジング半分体250および下部ハウジング半分体252の回転を防ぐために増加した表面積を提供する。ボス250aの近位部分250bは傾斜している。傾斜した近位部分250bは、スリーブ251が、上部ハウジング半分体250および下部ハウジング半分体252がスリーブ251内に位置決めされるとき、ボス250a上を滑動することを可能にする。ボス250aは、その他の形態、例えば、円形、矩形、三角形などであり得、そしてなお、その意図された機能を達成することが想定される。さらに、ボス250aは、上部半分体250に沿っていずれかに再位置決めされ得るか、またはそれに代わって、下部半分体252上か、もしくは各ハウジング半分体250および252上に部分的に位置決めされ得る。
【0023】
上部ハウジング半分体250の近位端または挿入先端部193は、差し込み型様式で外科用器具の遠位端を解放可能に係合するための係合ナブ254を含む。ハウジング半分体250および252は、その中に軸方向駆動アセンブリ212を滑動可能に受容するためのチャネル400を規定する。第1の関節リンク256は、上部ハウジング半分体250と下部ハウジング半分体252との間に形成されたスロット402内に滑動可能に位置決めされるような寸法である。一対のH−ブロックアセンブリ255は、ハウジング部分200の遠位端に隣接し、そして軸方向駆動アセンブリ212の遠位端に隣接して位置決めされ、関節運動および外科用ステープル留め装置10の発射の間に駆動アセンブリ212の外方への曲げ、そして突き出ることを防ぐ。各H−ブロックアセンブリ255は、本体部分200に固定して取り付けられる近位端、および取り付けアセンブリ235に固定して取り付けられる遠位端を含む可撓性本体255aを含む。
【0024】
保持部材288は、軸方向駆動アセンブリ212の係合セクション270上に支持される。保持部材288は、下部ハウジング半分体252中に形成されるスロットまたは窪み252a内に離脱可能に位置決めされる一対のフィンガー288aを含む。作動において、SULU16が外科用器具に取り付けられ、そして軸方向駆動アセンブリ212が外科用器具500の作動部材516に所定の力を付与することにより作動されるとき(図10)、軸方向駆動アセンブリ212は遠位方向に進行され、駆動アセンブリ212および保持部材288を遠位方向に移動する。保持部材288が遠位方向に進行されるとき、フィンガー288aは、窪み252aから押され、外科用器具が作動されたことの音響および触覚指標を提供する。保持部材288は、所定の軸方向の力が軸方向駆動アセンブリ212に付与されるまで、DLU16内の固定された位置に軸方向駆動アセンブリ212を維持することにより、輸送の間のように、DLU16の不注意の部分的作動を防ぐように設計されている。
【0025】
軸方向駆動アセンブリ212は、遠位作動ヘッド268および近位係合セクション270を含む細長い駆動ビーム266を含む。1つの実施形態では、駆動ビーム266は、複数のスタックされた材料シートから構築される。係合セクション270は、駆動部材272内に形成された一対の対応する保持スロットを据え付けられて係合する一対の弾性の係合フィンガー270aおよび270bを含む。駆動部材272は、DLU16の近位端が外科用器具500の本体部分412と係合されるとき、外科用器具の制御ロッド520の遠位端520(図10)を受容するような形態の近位出入口274を含む。
【0026】
図1および5〜9を参照して、関節機構400が示され、これは、関節ノブ402、関節スピンドル404、および第2の関節リンク406を含む。関節スピンドル404は、上記関節ノブ402と第2の関節リンク406との間の機械的インターフェースを提供する。この関節スピンドル404は、第1の直径、およびこの円筒形部材412の上部に配置されたフランジ414を有する円筒形部材412を含む(図7を参照のこと)。このフランジ414は、円筒形部材412から側方に延び、そして上記円筒形部材412の第1の直径より大きい第2の直径を有する。
【0027】
上記関節スピンドル404は、ハンドル510のハウジングと一体に形成されるハウジングブロック410内に回転可能に収容される。このハウジングブロック410は、第1の直径を有する窪んだ部分420、および第2の直径を有する段のある部分422を含む。組み立ての間に、この関節スピンドル404が、ハウジングブロック410中に挿入されるとき、上記円筒形部材412およびフランジ414は、これら構成要素の対応する第1の直径および第2の直径に起因して、窪んだ部分420および段のある部分422とそれぞれ機械的にインターフェースする。
【0028】
関節ノブ402は、フランジ414の上面から上方に延びるノブインターフェース部材416の周りで上記関節スピンドル404の上部上に取り付けられ、そして好ましくはそれと一体に形成される。これは、上記関節ノブ402の回転運動が、関節スピンドル404の回転運動に変換されることを可能にする。このインターフェース部材416は、ノブ402によって奏されるトルクを関節スピンドル404に移すための形態の多角形(例えば、矩形)形状を有する。このノブ402は、この関節スピンドル404と一体に形成され得る。上記インターフェース部材416がそれを通って通過する開口部を有するカバー405は、関節スピンドル404の上部上、そして関節ノブ402の下に配置される。このカバー405は、ハウジングブロック410内の関節機構404の構成要素を取り囲む。このカバー405は、ねじ、リベットなどのような当業者に公知の種々の従来機構を経由してハウジングブロック410に固定され得る。
【0029】
第2の関節リンク406は、本体部分512内で長軸方向に延び、そしてその遠位端に第2の関節フィンガー424を含む。この関節フィンガー424は、関節リンク256の近位端に配置された第1の関節フィンガー426とインターフェースするような形態である。これは、第2の関節リンク406の長軸方向移動を第1の関節リンク256へ変換することを可能にし、これは、次に、ツールアセンブリ17の関節運動を押す。より詳細には、上部取り付け部分236は、上部取り付け部分236から下方に延びる関節旋回部材236cを含む。第1の関節リンク256は、この旋回部材236cを受容するためのボア256aを含む。この旋回部材236cは、この旋回部材236cがボア256aを通過するとき、上部取り付け部分236および下部取り付け部分238を、それらの間の第1の関節リンク256と相互連結する。この第1の関節リンク256の長軸方向運動は、上部取り付け部分236および下部取り付け部分238を押して旋回部材284の周りで回転し、それによって、ツールアセンブリ17を関節運動する。
【0030】
上記第1および第2の関節リンク256および406の長軸方向運動は、関節スピンドル404の回転運動を経由して与えられる。第2の関節リンク406は、関節スピンドル404の円筒形部材412の底面から下方に延びるリンクインターフェース部材418を経由して関節スピンドル404と機械的にインターフェースする。この第2の関節リンク406は、第2の関節リンク406を横切って側方に延びる関節スリット426を含む。上記インターフェース部材418は、上記円筒形部材の底面の中心から離れて位置決めされ、そしてスリット426内に受容される。関節スピンドル404の回転の間に、上記インターフェース部材418は、その中心の周りに回転される。上記スリット426は、その幅で上記インターフェース部材418の周りに実質的に適合するような寸法であるので、このインターフェース部材418はその中で側方方向に辿るのみであり、そしてこのインターフェース部材418の回転運動の長軸方向成分は、第2の関節リンク406に移される。
【0031】
上記関節スピンドル404はまた、ツールアセンブリ17の最大関節角度を制限するための機構を含む。より詳細には、関節スピンドル404は、フランジ414の底面から下方に延びる案内部材430を含む。この案内部材430は、段のある部分422の上面内に配置される弧状形状の案内チャネル432と機械的にインターフェースされるような形態である。この案内部材430はチャネル432内を移動し、そしてチャネル432の長さに対する関節スピンドル404の回転範囲を制限する。
【0032】
関節機構400はまた、使用者に、触覚フィードバック、およびノブ402の回転を制御する手段、そしてそれ故、所定の増分のツールアセンブリ17の関節運動を提供する。上記フランジ414は、その外側周縁面に一連のノッチ434を含む。これらノッチ434は、互いから所定長さ離れて設定され、そしてロック機構435とインターフェースするような形態である。このロック機構435は、ハウジングブロック410中の窪み438内に配置されたスプリング負荷されるプランジャー436を含み、このプランジャー436は、フランジ414の外側周縁面に対してほぼ垂直に面している。当業者に理解されるように、それに対し圧力を提供する別の弾性機構は、スプリングに代わって用いられ得る。その中のスプリングに起因してプランジャー436は、フランジ414の外面に対して押され、そして関節スピンドル404が回転されるとき、上記ノッチ434は、プランジャー436を横切って通過される。ノッチ434の1つがプランジャー436と整列されるとき、プランジャー436は、スプリングを経由してノッチ434中に押される。これは、スピンドル404の回転位置を、ツールアセンブリ17の関節位置とともに指示することを可能にする。プランジャー436の先端部およびノッチ434は、好ましくは、相補的形状(例えば、円錐形、テーパー状エッジなど)から形成され、関節スピンドル404への十分なトルクの付与に際し、嵌合することおよび係合を解くことを容易にする。
【0033】
特定の実施形態では、関節スピンドル404は、フランジ414の周縁外面に沿って位置決めされた5つのノッチ434を含む。中央ノッチ434は、0゜関節位置に一致し、もそして隣接ノッチ434は、90゜の得られる総関節角度に対してそれぞれ±22.5゜および±45゜位置に対応する。案内チャネル432の弧長さはまた、ノブ402が±45゜の最大関節位置まで回転されるとき、案内チャネル432がこれらの点を超える案内部材430の移動を制限し、そしてその結果、関節スピンドル404の回転を制限するように、90゜の最大の所望される関節角度に対応する。
【0034】
関節ノブ402が時計方向または半時計方向のいずれかに回転されるとき、関節スピンドル404は、最初、ロック機構436に打ち勝つために最小量のトルクを必要とする。第1の隣接ノッチ434に到達する際、プランジャー436はその中で押され、そして関節スピンドル404をその場に一時的にロックし、使用者に触覚フィードバックを提供する。関節スピンドル404が回転されるとき、インターフェース部材418の回転運動は、スリット426を経由して、インターフェース部材418がその中を辿るとき第2の関節リンク406の長軸方向運動に移される。この関節リンク256の長軸方向運動は、取り付けアセンブリ235上の関節旋回部材236cの長軸方向運動に移され、これは、ツールアセンブリ17を旋回部材284の周りで関節運動させる。関節スピンドル404を45゜の最終位置まで回転することは、案内チャネル432の端部に遭遇する関節スピンドル404の案内部材430およびもっとも遠いノッチ434とインターフェースするプランジャー436に起因してツールアセンブリ17をそこにロックする。このツールアセンブリ17のロックを解くために、ノブ402は反対方向に回され、その-他のノッチ4
34および中央ノッチ434の中立の軸方向平面(例えば、0゜)を通って横切る。ノブ402の回転範囲は±95゜であり、これは、±45゜位置間でツールアセンブリ17を関節運動することに対応する。
【0035】
当業者は、関節スピンドル404が所望の関節角度および/または位置に依存して種々の間隔で配置される任意の数のノッチ434を含み得ることを認識する。上記関節機構400に関して開示される関節角度および最大回転範囲は例示であることがさらに理解されるべきである。
【0036】
図9を参照して、関節機構400と作動可能に連結され、そしてハウジングブロック410内に位置決めされる感知機構450の断面図が示される。この感知機構450は、関節スピンドル404のスロット440内に受容されるような形態であるナブ部分442を有するキャップセンサー444を含む。このキャップセンサー444は、本体部分512と係合される使い捨て装填ユニット16のタイプを感知するように適合されている。特に、このキャップセンサー444は、関節スピンドル404とインターフェースするような形態であり、そしてノブ部分442がスロット440内に受容される場合、その関節運動を防ぐ。この関節運動する使い捨て可能な装填ユニット16は、延長された挿入先端部193を有する(図1A)。関節運動するDLUが、ステープル留め装置10の本体部分512の遠位端中に挿入されるとき、挿入先端部193は、近位方向にキャップセンサー444との係合に移動し、キャップセンサー444およびナブ部分442を近位方向に、そしてスロット440から外に押す。ナブ部分442をスロット444の外側に配置し、関節スピンドル404は自由に回転可能に移動し、ステープル留め装置10の関節運動を行う。関節運動しない使い捨て可能な装填ユニットは、延長された挿入先端部を有さない。従って、関節運動しない使い捨て可能な装填ユニットが挿入されるとき、キャップセンサー444は、ナブ部分442をスロット444から移動するに十分な距離近位方向に退却されない。従って、関節スピンドル404は、スロット444中に位置決めされているキャップセンサー444のナブ部分442によって回転可能に移動することが妨げられ、そして関節スピンドル404は、その中立位置にロックされる。別のタイプの感知機構が、共有に係る「外科用ステープル留め装置」と題する米国特許第5,865,361号に記載され、その内容は、本明細書によって参考として本明細書中に援用される。
【0037】
種々の改変が、本明細書に開示される実施形態になされ得ることが理解される。例えば、DLUは、開示される器具とは対照的に外科用器具の挿入先端部を受容するような形態であり得る。従って、上記の説明は制限的であるとして解釈されるべきではなく、好ましい実施形態の単なる例示である。当業者は、本明細書に添付される特許請求の範囲および思想内でその他の改変を想定する。
【技術分野】
【0001】
(技術分野)
本開示は、関節運動するツールアセンブリを有する外科用器具に関する。より詳細には、本開示は、関節運動する外科用器具、例えば、直線状のステープラを非関節運動位置から作動するための機構を含む外科用器具に関する。
【背景技術】
【0002】
(背景)
関節運動のための外科用器具の本体部分の遠位端上に取り付けられたツールアセンブリを含む外科用器具は周知である。代表的には、このような外科用器具は、操作者が外科用器具の本体部分に対して上記ツールアセンブリを遠隔から関節運動することを可能にし、操作者が組織により容易に接近し、手術し、そして/または操作することを可能にする関節運動制御機構を含む。
【0003】
このような関節運動ツールアセンブリは、特に内視鏡外科的手順で所望されるようになった。内視鏡外科的手順では、外科用器具の遠位端は、身体中の小切開を通って挿入され、手術部位に接近する。代表的には、適切なサイズ、例えば、5mm、10mmなどのカニューレが、この身体切開を通って挿入され、手術部位に接近するための案内チャネルを提供する。小さな身体切開、すなわち、患者に対するより小さな瘢痕の低減された外傷、より迅速な治癒時間を提供することが所望されるので、外科用器具とカニューレの内径との間の許容誤差は小さい。
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の関節運動ツールの先端部は、主に関節運動機構の機械的設計の制限に起因して、限られた範囲の運動を有する。この関節運動先端部の運動のより広い範囲を提供し得る関節機構を含む関節運動する外科用機器を提供することが所望される。
【課題を解決するための手段】
【0005】
上記課題を解決するために、本発明は、例えば、以下を提供する。
(項目1)外科用器具であって:
ハンドル部分;
該ハンドル部分から遠位方向に延び、そして第1の長軸方向軸を規定する本体部分;
第2の長軸方向軸を規定し、そして近位端を有する関節運動ツールアセンブリであって、該本体部分の遠位端に配置され、そして該第2の長軸方向軸が該第1の長軸方向軸と実質的に整列される第1の位置から、少なくとも該第2の軸が該第1の軸に対して所定の角度で配置される第2の位置まで移動可能である関節運動ツールアセンブリ;および
該ツールアセンブリを関節運動するための関節リンク、インターフェース部材を回転するための関節ノブを含む関節機構を備え、該関節リンクが該インターフェース部材に作動可能に連結された近位端にスリットを有し、ここで、該関節ノブの回転運動が第1の関節リンクおよび第2の関節リンクの軸方向運動に変換され、それによって、該関節運動ツールアセンブリを関節運動する、外科用器具。
(項目2)前記関節機構が関節スピンドルを受容するような形態のハウジングブロックをさらに含み、該関節スピンドルが前記関節ノブにそれとともに回転するように取り付けられる、項目1に記載の外科用器具。
(項目3)前記ハウジングブロックおよび前記関節スピンドルが、該関節スピンドルの回転範囲を制限するように適合される、項目2に記載の外科用器具。
(項目4)前記ハウジングブロックが、実質的に弧形状を備えたチャネルを有し、該チャネルが前記関節スピンドル上の部材を受容する、項目3に記載の外科用器具。
(項目5)前記チャネルの長さが、前記関節運動ツールの先端部の最大の所望関節に対応する、項目4に記載の外科用器具。
(項目6)前記関節スピンドルが、所定の増分で回転するような形態である、項目2に記載の外科用器具。
(項目7)前記関節スピンドルが複数のノッチを規定し、該複数のノッチが該関節スピンドルを係合するために付勢されるプランジャーと機械的にインターフェースするような形態である、項目6に記載の外科用器具。
(項目8)前記複数のノッチの各々が、前記関節運動ツールアセンブリの関節位置とともに前記関節スピンドルの回転位置を指示する、項目7に記載の外科用器具。
(項目9)前記ノッチの少なくとも1つが、前記関節運動ツールアセンブリの中立の軸平面位置と対応する、項目8に記載の外科用器具。
(項目10)前記ノッチの2つが、前記関節運動ツールアセンブリの最大関節運動位置に対応する、項目6に記載の外科用器具。
(項目11)前記関節運動ツールアセンブリが、使い捨て装填ユニットのパーツである、項目1に記載の外科用器具。
(項目12)前記関節運動ツールアセンブリが、カートリッジアセンブリおよびアンビルアセンブリを含む、項目1に記載の外科用器具。
(項目13)前記本体部分内に位置決めされ、そして前記関節機構と作動可能に連結される感知機構をさらに備え、該感知機構が該本体部分と係合される使い捨てタイプの装填ユニットを感知するための感知キャップを含む、項目1に記載の外科用器具。
(項目14)前記感知キャップが細長い前記本体内に位置決めされ、そして関節運動しない使い捨て装填ユニットの該本体部分との係合に応答する第1の位置に、関節運動する使い捨てユニットの係合の該本体部分との係合に応答する第2の位置に移動可能である、項目13に記載の外科用器具。
(項目15)前記第1の位置で、前記感知機構が前記関節機構と作動可能に係合され、前記関節ノブの移動を防ぐ、項目14に記載の外科用器具。
(項目16)外科用ステープル留め装置であって:
移動可能なハンドルを含むハンドル部分であって、該移動可能なハンドルが作動ストロークを通って移動可能であるハンドル部分;
該ハンドル部分から遠位方向に延び、そして第1の長軸方向軸を規定する本体部分;および
該本体部分の遠位端との離脱可能な係合のための形態である使い捨て可能な装填ユニットであって、そして:
近位本体部分;および
第2の長軸方向軸を規定し、そして近位端を有する関節運動ツールアセンブリであって、該本体部分の遠位端に配置され、そして該第2の長軸方向軸が該第1の長軸方向軸と実質的に整列される第1の位置から、少なくとも該第2の軸が該第1の長軸方向軸に対して所定の角度で配置される第2の位置まで移動可能である関節運動ツールアセンブリ;および
該ツールアセンブリを関節運動するための関節リンク、インターフェース部材を回転するための関節ノブを含む関節機構を備え、該関節リンクが該インターフェース部材に作動可能に連結された近位端にスリットを有し、ここで、該関節ノブの回転運動が第1の関節リンクおよび第2の関節リンクの軸方向運動に変換され、それによって、該関節運動アセンブリを関節運動する関節運動ツールアセンブリを含む使い捨て可能な装填ユニット、を備える、外科用ステープル留め装置。
(項目17)前記関節機構が、関節スピンドルを受容するような形態であるハウジングブロックをさらに含み、該関節スピンドルが、該関節ノブにそれとともに回転するように取り付けられる、項目16に記載の外科用ステープル留め装置。
(項目18)前記ハウジングブロックおよび関節スピンドルが、該関節スピンドルの回転範囲を制限するように適合される、項目17に記載の外科用ステープル留め装置。
(項目19)前記ハウジングブロックが実質的に弧形状を備えたチャネルを有し、該チャネルが前記関節スピンドル上の部材を受容する、項目18に記載の外科用ステープル留め装置。
(項目20)前記チャネルの長さが、前記関節運動ツールの先端部の最大の所望関節に対応する、項目19に記載の外科用ステープル留め装置。
(項目21)前記関節スピンドルが、所定の増分で回転するような形態である、項目17に記載の外科用ステープル留め装置。
(項目22)前記関節スピンドルが複数のノッチを規定し、該複数のノッチが該関節スピンドルを係合するために付勢されるプランジャーと機械的にインターフェースするような形態である、項目21に記載の外科用ステープル留め装置。
(項目23)前記複数のノッチの各々が、前記関節運動ツールアセンブリの関節位置とともに前記関節スピンドルの回転位置を指示する、項目22に記載の外科用ステープル留め装置。
(項目24)前記ノッチの少なくとも1つが、前記関節運動ツールアセンブリの中立の軸平面位置と対応する、項目23に記載の外科用ステープル留め装置。
(項目25)前記ノッチの2つが、前記関節運動ツールアセンブリの最大関節運動位置に対応する、項目21に記載の外科用ステープル留め装置。
(項目26)前記関節運動ツールアセンブリが、カートリッジアセンブリおよびアンビルアセンブリを含む、項目16に記載の外科用ステープル留め装置。
(項目27)前記本体部分内に位置決めされ、そして前記関節機構と作動可能に連結される感知機構をさらに備え、該感知機構が該本体部分と係合される使い捨てタイプの装填ユニットを感知するための感知キャップを含む、項目16に記載の外科用ステープル留め装置。
(項目28)前記感知キャップが細長い前記本体内に移動可能に位置決めされ、そして関節運動しない使い捨て装填ユニットの該本体部分との係合に応答する第1の位置に、関節運動する使い捨てユニットの該本体部分との係合に応答する第2の位置に移動可能である、項目27に記載の外科用ステープル留め装置。
(項目29)前記第1の位置で、前記感知機構が前記関節機構と作動可能に係合され、前記関節ノブの移動を防ぐ、項目28に記載の外科用ステープル留め装置。
【0006】
ハンドル部分、本体部分、関節運動ツールアセンブリおよび関節機構を含む外科用ステープル留め器具が開示される。本体部分はハンドル部分から遠位方向に延びる。関節機構は、上記ツールアセンブリを関節運動するための関節リンク、インターフェース部材を回転するための関節ノブ、このインターフェース部材に作動可能に連結される近位端にあるスリットを有する関節リンクを含み、ここで、この回転ノブの回転運動が、第1および第2の関節リンクの軸方向運動に変換され、それによって上記関節運動ツールアセンブリを関節運動する。
【0007】
本開示は、ハンドル部分、本体部分、関節運動ツールアセンブリおよび少なくとも1つのカップリング部材を含む外科用器具に関する。この本体部分は、ハンドル部分から遠位方向に延び、そして第1の長軸方向軸を規定する。上記関節運動ツールアセンブリは、第2の長軸方向軸を規定し、そして上記本体部分の遠位端に配置される。この関節運動ツールアセンブリは、上記第2の長軸方向軸が上記第1の長軸方向軸と実質的に整列される第1の位置から、少なくとも上記第2の軸が上記第1の軸に対して所定の角度で配置される第2の位置まで移動可能である。上記関節運動ツールアセンブリはまた、第1の関節運動リンクを含む。関節機構は、第2の関節リンク、上記ハンドル部分に隣接して取り付けられ、そして関節スピンドルと機械的にインターフェースする関節ノブを含む。この第2の関節リンクは、その近位端で関節ノブに作動可能に、そして遠位端で第1の関節リンクに作動可能に連結され、この関節ノブの回転運動が上記第1および第2の関節リンクの側方移動に変換され、それによって上記関節運動ツールアセンブリを関節運動する。
【0008】
本開示はまた、外科用ステープル留め装置に関する。この外科用ステープル留め装置は、移動可能なハンドルを含むハンドル部分を含み、この移動可能なハンドルは、作動ストロークを通って移動可能である。この外科用装置はまた、このハンドル部分から遠位方向に延び、そして第1の長軸方向軸を規定する本体部分、およびこの本体部分の遠位端との離脱可能な係合のための形態である使い捨て可能な装填ユニットを含む。この使い捨て可能な装填ユニットは、近位本体部分、および第2の長軸方向軸を規定する関節運動ツールアセンブリを含む。この関節運動ツールアセンブリは、上記近位本体部分の遠位端に隣接して配置され、そして上記第2の長軸方向軸が上記第1の長軸方向軸と実質的に整列される第1の位置から、少なくとも上記第2の軸が上記第1の長軸方向軸に対して所定の角度で配置される第2の位置まで移動可能である。上記装置はさらに、第2の関節リンク、上記ハンドル部分に隣接して取り付けられ、そして関節スピンドルと機械的にインターフェースする関節ノブを含み、この第2の関節リンクは、この関節ノブと作動可能に連結される近位端、および上記本体部分の遠位端に隣接して位置決めされ、そして上記第1の関節リンクに作動可能に連結される遠位端を有し、ここで、上記関節ノブの回転運動は、上記第1および第2の関節リンクの側方運動に変換され、それによって、上記関節運動ツールアセンブリを関節運動する。
【0009】
本開示また、外科用器具との離脱可能な係合のための形態である使い捨て可能な装填ユニットに関する。この使い捨て可能な装填ユニットは、本体部分、関節運動ツールアセンブリおよび少なくとも1つのカップリング部材を含む。
【発明の効果】
【0010】
本発明により、関節運動先端部の運動のより広い範囲を提供し得る関節機構を含む関節運動する外科用機器を提供することができる。
【図面の簡単な説明】
【0011】
本明細書によって開示される外科用器具の種々の実施形態は、本明細書で図面を参照して開示される。
【図1】図1は、関節運動ツールアセンブリを備えた本明細書に開示される外科用器具の1つの実施形態の遠位端からの側方斜視図である。
【図1A】図1Aは、上記ツールアセンブリを含む図1に示される外科用器具の使い捨て可能な装填ユニット(DLU)の近位端から側方斜視図である。
【図2】図2は、図1に示される外科用器具のDLUのパーツを分離した、取り付けアセンブリおよびツールアセンブリの遠位端の側方斜視図である。
【図3】図3は、取り付けアセンブリ、およびパーツが分離された図1Aに示されるDLUの近位本体部分の斜視図である。
【図3A】図3Aは、図1に示される外科用器具のカップリング部材および保持具部材の側方斜視図である。
【図3B】図3Bは、図1に示される外科用器具のDLUの取り付けアセンブリの上部取り付け部分の側方斜視図である。
【図3C】図3Cは、図1に示される外科用器具のDLUの取り付けアセンブリの下部取り付け部分の側方斜視図である。
【図3D】図3Dは、近位本体部分、取り付けアセンブリ、およびツールアセンブリが関節運動しない位置にある外科用器具のDLUのツールアセンブリの近位端の上からの側方斜視図である。
【図3E】図3Eは、近位本体部分、取り付けアセンブリ、および関節運動された位置まで移動する図3Dに示されるツールアセンブリの近位端の上からの側方斜視図である。
【図3F】図3Fは、近位本体部分の遠位端、取り付けアセンブリ、およびツールアセンブリが関節運動しない位置にある外科用器具のDLUのツールアセンブリの近位端の下からの側方斜視図である。
【図3G】図3Gは、近位本体部分の遠位端、取り付けアセンブリ、および関節運動された位置まで移動する図3Fに示されるツールアセンブリの近位端の下からの側方斜視図である。
【図4】図4は、図1Aに示されるDLUのツールアセンブリの側方断面図である。
【図5】図5は、本開示に従う、図1に示される外科用器具の関節機構の側方斜視図である。
【図6】図6は、本開示に従う、図5の関節機構の内部の側方斜視図である。
【図7】図7は、本開示に従う、図5の関節機構の分離したパーツの斜視図である。
【図8】図8は、本開示に従う、図5の関節機構のアセンブルされたパーツの外部からの斜視図である。
【図9】図9は、図5の断面線9−9に沿ってとった断面図である。
【図10】図10は、DLU、および外科用器具へのDLUの取り付けの前の図1に示される外科用器具の側方斜視図である。
【発明を実施するための形態】
【0012】
(実施形態の詳細な説明)
本明細書に開示される外科用器具および使い捨て可能な装填ユニットの実施形態は、ここで、図面を参照して詳細に説明され、図面では、同様の参照番号は、いくつかの図面の各々で同一または対応する要素を指定する。
【0013】
図1を参照して、外科用器具500は、ハンドル部分510、本体部分512、および使い捨て可能な装填ユニット(「DLU」)16を含む。ハンドル部分510は、静止ハンドル514、および移動可能なハンドルまたはトリガー516を含む。移動可能なハンドル516は、静止ハンドル514に対して移動可能であり、本体部分512の遠位端から突出する制御ロッド520を進行する(図10)。ハンドル部分510および本体部分512は、「外科用ステープル留め装置」と題する共有にかかる米国特許第6,330,965号に開示される様式で構築され得、その開示は本明細書によって参考として本明細書中に援用される。あるいは、その他の外科用器具がDLU16とともに用いられ得、内視鏡手順を実施する。この外科用器具500はまた、DLU16のツールアセンブリ17を関節運動するための関節機構400を含む。
【0014】
図1および1Aを参照して、簡単に述べれば、DLU16は、ツールアセンブリ17、近位本体部分200および取り付けアセンブリ235を含む。本体部分200は、以下に詳細に論議される様式で外科用器具500の遠位端を離脱可能に係合するよう適合された近位端を有する(図10)。取り付けアセンブリ235は、本体部分200の遠位端に旋回可能に固定され、そしてツールアセンブリ17の近位端に固定して取り付けられる。本体部分200の長軸方向軸に垂直な軸の周りの取り付けアセンブリ235の旋回移動は、ツールアセンブリ17の長軸方向軸が本体部分200の長軸方向軸と整列される関節運動しない位置と、ツールアセンブリ17の長軸方向軸が本体部分200の長軸方向軸に対して所定の角度で配置される関節運動した位置との間でツールアセンブリ17の関節運動を行う。
【0015】
図2〜4をまた参照して、ツールアセンブリ17は、カートリッジアセンブリ18およびアンビルアセンブリ20を含む。アンビルアセンブリ20は、複数のステープル変形凹面30を有するアンビル部分28、およびアンビル部分28の上面に固定されたカバープレート32を含む。カバープレート32およびアンビル部分28は、それらの間に腔34を規定し(図4)、これは、駆動アセンブリ212の遠位端を受容するような寸法である(図3)。カバープレート32は、駆動アセンブリ212の遠位端を取り囲み、DLU16の関節運動の間に組織を挟むことを防ぐ。長軸方向スロット38は、アンビル部分28を通って延び、駆動アセンブリ212の保持フランジ40の通過を容易にする。アンビル部分28上に形成されたカム運動面42は、駆動アセンブリ212の保持フランジ40上に支持された一対のカム部材40aを係合するように位置決めされ、アンビルアセンブリおよびカートリッジアセンブリの接近を行う。アンビル部分28上に形成された一対の旋回部材44は、カートリッジアセンブリキャリア48中に形成されたスロット46内に位置決めされ、アンビル部分28をその間隔を置き、そして接近された位置の間に案内する。一対の安定化部材50は、キャリア48上に形成された個々のショルダー52を係合し、カム運動面42が旋回部材44の周りで旋回されるとき、アンビル部分28がステープルカートリッジ54に対して軸方向にスライドすることを防ぐ。
【0016】
カートリッジアセンブリ18は、ステープルカートリッジ54を受容するような寸法および形態である細長い支持チャネル56を規定するキャリア48を含む。ステープルカートリッジ54および細長い支持チャネル56に沿ってそれぞれ形成された対応するタブ58およびスロット60は、支持チャネル56内の固定された位置にステープルカートリッジ54を保持するように機能する。ステープルカートリッジ54上に形成された一対の支持支柱62は、キャリア48の側壁上に静止するように位置決めされ、支持チャネル56内でステープルカートリッジ54をさらに安定化する。
【0017】
ステープルカートリッジ54は、複数のステープルまたはファスナー66およびプッシャー68を受容するための保持スロット64(図2)を含む。複数の側方に間隔を置いて離れた長軸方向スロット70がステープルカートリッジ54を通って延び、作動スレッド74の直立するカムウェッジ72を収容する(図2)。中央の長軸方向スロット76は、ステープルカートリッジ54の実質的長さに沿って延び、ナイフブレード78の通過を容易にする(図4)。外科用ステープラ10の作動の間に、駆動アセンブリ212は作動スレッド74に接し、そして作動スレッド74をステープルカートリッジ54の長軸方向スロット70を通って押し、カムウェッジ72をプッシャー68との逐次的接触に進行させる。プッシャー68は、ファスナー保持スロット64内でカムウェッジ72に沿って垂直に移動し、そしてファスナー66を、保持スロット64からアンビルアセンブリ20のステープル変形腔30に押す(図4)。
【0018】
図3を参照して、取り付けアセンブリ235は、上部取り付け部分236および下部取り付け部分238を含む。中央に位置される旋回部材284は、カップリング部材246中に形成された個々の開口部246aを通って上部取り付け部分236から延びる。下部取り付け部分238は、旋回部材284aを受容するためのボア238eを含む(図3F)。旋回部材284aは、ボア238eおよび第2のカップリング部材246を通って延びる。カップリング部材246および247の各々は、上部および下部ハウジング半分体250および252から形成される内部ハウジングの遠位端に形成される溝290中に受容されるような形態である相互ロックする近位部分246b、247bを含む。カップリング部材246、247は、取り付けアセンブリ235、ならびに上部および下部ハウジング半分体250および252を互いに対して長軸方向で固定された位置に保持し、その一方、それに対する取り付けアセンブリ235の旋回移動を可能にする。
【0019】
図3A〜3Cを参照して、各カップリング部材246、247は、取り付けアセンブリ235を係合するように位置決めされる遠位端246dを有する片持ちスプリングアーム246c、247cを含む。より詳細には、上部取り付け部分236は、カップリング部材246のスプリングアーム246cの遠位端246dを受容するような寸法の窪み236bを含む上面236aを含む。下部取り付け部分238は、カップリング部材247のスプリングアーム247cを受容するための寸法である窪み238cを規定する一対の高くなった面238bを有する底面238aを含む。あるいは、1つ以上の窪みがツールアセンブリ17の上部および下部取り付け部分中に形成され得るか、または窪みが上部および下部取り付け部分のいずれかの上に形成され得る。
【0020】
図3D〜3Gに示されるように、カップリング部材246のスプリングアーム246cの遠位端246dが上部取り付け部分236の窪み236b中に位置決めされるとき、スプリングアーム246cは、取り付けアセンブリ235を非関節運動位置に保持する。スプリングアーム246cは、取り付けアセンブリ235を、窪み236bからスプリングアーム246cを曲げるために十分な所定の力が付与されて取り付けアセンブリ235およびツールアセンブリ17の関節運動を行うまで、その非関節運動位置に保持する。スプリングアーム247cは、窪み238c中に同様に保持され、取り付けアセンブリ235の位置を保持する。所定の力が取り付けアセンブリ235およびツールアセンブリ17に付与されるとき、スプリングアーム246c、247cは、図3Eおよび3G中に示されるように、窪み236bおよび238cから外方に跳ね、DLU16の近位本体部分200の遠位端に対して取り付けアセンブリ235(そしてそれ故、ツールアセンブリ17)の旋回移動を許容する。
【0021】
上記で論議されたようにスプリングアーム246c、247cならびに窪み236bおよび238cは、ツールアセンブリ17を、所定の力が取り付けアセンブリ235に付与され、スプリングアーム246c、247cを取り付けアセンブリ235の窪み236bおよび238cから解放までその非関節運動位置に維持する。スプリングアーム/窪みが、ステープラ、把持器(グラスパー)(図3Hを参照のこと)、動力を与えられたシールデバイス、例えば、RFシールデバイスなどを含む任意の関節運動外科用デバイスに組み込まれ得ることが想定される。さらに、2つのスプリングアーム/窪みが示されているけれども、単一のスプリングアームが提供され得る。さらに、この関節運動アセンブリはDLUのパーツにとっては必要なく、むしろ外科用器具の遠位端上に直接指示され得る。例えば、取り付けアセンブリは、ツールアセンブリに取り外し可能または取り外し不能に固定され得、そして外科用器具の遠位端に直接固定される。
【0022】
図3を参照して、上部ハウジング半分体250および下部ハウジング半分体252は、本体部分200の外側スリーブ251内に含まれる。本体部分251は、上部ハウジング半分体250上に形成されたボスまたは突出部250aを受容するような寸法の切り抜き251aを含む。この切り抜き251a内の突出部250aの位置決めは、本体部分200の外側スリーブ251内で上部ハウジング半分体250および下部ハウジング半分体252の軸方向および回転移動を防ぐ。1つの実施形態では、ボス250aは、側方寸法より大きな軸方向寸法を有する実質的に矩形の形態を有する。より大きな軸方向寸法は、スリーブ251内で上部ハウジング半分体250および下部ハウジング半分体252の回転を防ぐために増加した表面積を提供する。ボス250aの近位部分250bは傾斜している。傾斜した近位部分250bは、スリーブ251が、上部ハウジング半分体250および下部ハウジング半分体252がスリーブ251内に位置決めされるとき、ボス250a上を滑動することを可能にする。ボス250aは、その他の形態、例えば、円形、矩形、三角形などであり得、そしてなお、その意図された機能を達成することが想定される。さらに、ボス250aは、上部半分体250に沿っていずれかに再位置決めされ得るか、またはそれに代わって、下部半分体252上か、もしくは各ハウジング半分体250および252上に部分的に位置決めされ得る。
【0023】
上部ハウジング半分体250の近位端または挿入先端部193は、差し込み型様式で外科用器具の遠位端を解放可能に係合するための係合ナブ254を含む。ハウジング半分体250および252は、その中に軸方向駆動アセンブリ212を滑動可能に受容するためのチャネル400を規定する。第1の関節リンク256は、上部ハウジング半分体250と下部ハウジング半分体252との間に形成されたスロット402内に滑動可能に位置決めされるような寸法である。一対のH−ブロックアセンブリ255は、ハウジング部分200の遠位端に隣接し、そして軸方向駆動アセンブリ212の遠位端に隣接して位置決めされ、関節運動および外科用ステープル留め装置10の発射の間に駆動アセンブリ212の外方への曲げ、そして突き出ることを防ぐ。各H−ブロックアセンブリ255は、本体部分200に固定して取り付けられる近位端、および取り付けアセンブリ235に固定して取り付けられる遠位端を含む可撓性本体255aを含む。
【0024】
保持部材288は、軸方向駆動アセンブリ212の係合セクション270上に支持される。保持部材288は、下部ハウジング半分体252中に形成されるスロットまたは窪み252a内に離脱可能に位置決めされる一対のフィンガー288aを含む。作動において、SULU16が外科用器具に取り付けられ、そして軸方向駆動アセンブリ212が外科用器具500の作動部材516に所定の力を付与することにより作動されるとき(図10)、軸方向駆動アセンブリ212は遠位方向に進行され、駆動アセンブリ212および保持部材288を遠位方向に移動する。保持部材288が遠位方向に進行されるとき、フィンガー288aは、窪み252aから押され、外科用器具が作動されたことの音響および触覚指標を提供する。保持部材288は、所定の軸方向の力が軸方向駆動アセンブリ212に付与されるまで、DLU16内の固定された位置に軸方向駆動アセンブリ212を維持することにより、輸送の間のように、DLU16の不注意の部分的作動を防ぐように設計されている。
【0025】
軸方向駆動アセンブリ212は、遠位作動ヘッド268および近位係合セクション270を含む細長い駆動ビーム266を含む。1つの実施形態では、駆動ビーム266は、複数のスタックされた材料シートから構築される。係合セクション270は、駆動部材272内に形成された一対の対応する保持スロットを据え付けられて係合する一対の弾性の係合フィンガー270aおよび270bを含む。駆動部材272は、DLU16の近位端が外科用器具500の本体部分412と係合されるとき、外科用器具の制御ロッド520の遠位端520(図10)を受容するような形態の近位出入口274を含む。
【0026】
図1および5〜9を参照して、関節機構400が示され、これは、関節ノブ402、関節スピンドル404、および第2の関節リンク406を含む。関節スピンドル404は、上記関節ノブ402と第2の関節リンク406との間の機械的インターフェースを提供する。この関節スピンドル404は、第1の直径、およびこの円筒形部材412の上部に配置されたフランジ414を有する円筒形部材412を含む(図7を参照のこと)。このフランジ414は、円筒形部材412から側方に延び、そして上記円筒形部材412の第1の直径より大きい第2の直径を有する。
【0027】
上記関節スピンドル404は、ハンドル510のハウジングと一体に形成されるハウジングブロック410内に回転可能に収容される。このハウジングブロック410は、第1の直径を有する窪んだ部分420、および第2の直径を有する段のある部分422を含む。組み立ての間に、この関節スピンドル404が、ハウジングブロック410中に挿入されるとき、上記円筒形部材412およびフランジ414は、これら構成要素の対応する第1の直径および第2の直径に起因して、窪んだ部分420および段のある部分422とそれぞれ機械的にインターフェースする。
【0028】
関節ノブ402は、フランジ414の上面から上方に延びるノブインターフェース部材416の周りで上記関節スピンドル404の上部上に取り付けられ、そして好ましくはそれと一体に形成される。これは、上記関節ノブ402の回転運動が、関節スピンドル404の回転運動に変換されることを可能にする。このインターフェース部材416は、ノブ402によって奏されるトルクを関節スピンドル404に移すための形態の多角形(例えば、矩形)形状を有する。このノブ402は、この関節スピンドル404と一体に形成され得る。上記インターフェース部材416がそれを通って通過する開口部を有するカバー405は、関節スピンドル404の上部上、そして関節ノブ402の下に配置される。このカバー405は、ハウジングブロック410内の関節機構404の構成要素を取り囲む。このカバー405は、ねじ、リベットなどのような当業者に公知の種々の従来機構を経由してハウジングブロック410に固定され得る。
【0029】
第2の関節リンク406は、本体部分512内で長軸方向に延び、そしてその遠位端に第2の関節フィンガー424を含む。この関節フィンガー424は、関節リンク256の近位端に配置された第1の関節フィンガー426とインターフェースするような形態である。これは、第2の関節リンク406の長軸方向移動を第1の関節リンク256へ変換することを可能にし、これは、次に、ツールアセンブリ17の関節運動を押す。より詳細には、上部取り付け部分236は、上部取り付け部分236から下方に延びる関節旋回部材236cを含む。第1の関節リンク256は、この旋回部材236cを受容するためのボア256aを含む。この旋回部材236cは、この旋回部材236cがボア256aを通過するとき、上部取り付け部分236および下部取り付け部分238を、それらの間の第1の関節リンク256と相互連結する。この第1の関節リンク256の長軸方向運動は、上部取り付け部分236および下部取り付け部分238を押して旋回部材284の周りで回転し、それによって、ツールアセンブリ17を関節運動する。
【0030】
上記第1および第2の関節リンク256および406の長軸方向運動は、関節スピンドル404の回転運動を経由して与えられる。第2の関節リンク406は、関節スピンドル404の円筒形部材412の底面から下方に延びるリンクインターフェース部材418を経由して関節スピンドル404と機械的にインターフェースする。この第2の関節リンク406は、第2の関節リンク406を横切って側方に延びる関節スリット426を含む。上記インターフェース部材418は、上記円筒形部材の底面の中心から離れて位置決めされ、そしてスリット426内に受容される。関節スピンドル404の回転の間に、上記インターフェース部材418は、その中心の周りに回転される。上記スリット426は、その幅で上記インターフェース部材418の周りに実質的に適合するような寸法であるので、このインターフェース部材418はその中で側方方向に辿るのみであり、そしてこのインターフェース部材418の回転運動の長軸方向成分は、第2の関節リンク406に移される。
【0031】
上記関節スピンドル404はまた、ツールアセンブリ17の最大関節角度を制限するための機構を含む。より詳細には、関節スピンドル404は、フランジ414の底面から下方に延びる案内部材430を含む。この案内部材430は、段のある部分422の上面内に配置される弧状形状の案内チャネル432と機械的にインターフェースされるような形態である。この案内部材430はチャネル432内を移動し、そしてチャネル432の長さに対する関節スピンドル404の回転範囲を制限する。
【0032】
関節機構400はまた、使用者に、触覚フィードバック、およびノブ402の回転を制御する手段、そしてそれ故、所定の増分のツールアセンブリ17の関節運動を提供する。上記フランジ414は、その外側周縁面に一連のノッチ434を含む。これらノッチ434は、互いから所定長さ離れて設定され、そしてロック機構435とインターフェースするような形態である。このロック機構435は、ハウジングブロック410中の窪み438内に配置されたスプリング負荷されるプランジャー436を含み、このプランジャー436は、フランジ414の外側周縁面に対してほぼ垂直に面している。当業者に理解されるように、それに対し圧力を提供する別の弾性機構は、スプリングに代わって用いられ得る。その中のスプリングに起因してプランジャー436は、フランジ414の外面に対して押され、そして関節スピンドル404が回転されるとき、上記ノッチ434は、プランジャー436を横切って通過される。ノッチ434の1つがプランジャー436と整列されるとき、プランジャー436は、スプリングを経由してノッチ434中に押される。これは、スピンドル404の回転位置を、ツールアセンブリ17の関節位置とともに指示することを可能にする。プランジャー436の先端部およびノッチ434は、好ましくは、相補的形状(例えば、円錐形、テーパー状エッジなど)から形成され、関節スピンドル404への十分なトルクの付与に際し、嵌合することおよび係合を解くことを容易にする。
【0033】
特定の実施形態では、関節スピンドル404は、フランジ414の周縁外面に沿って位置決めされた5つのノッチ434を含む。中央ノッチ434は、0゜関節位置に一致し、もそして隣接ノッチ434は、90゜の得られる総関節角度に対してそれぞれ±22.5゜および±45゜位置に対応する。案内チャネル432の弧長さはまた、ノブ402が±45゜の最大関節位置まで回転されるとき、案内チャネル432がこれらの点を超える案内部材430の移動を制限し、そしてその結果、関節スピンドル404の回転を制限するように、90゜の最大の所望される関節角度に対応する。
【0034】
関節ノブ402が時計方向または半時計方向のいずれかに回転されるとき、関節スピンドル404は、最初、ロック機構436に打ち勝つために最小量のトルクを必要とする。第1の隣接ノッチ434に到達する際、プランジャー436はその中で押され、そして関節スピンドル404をその場に一時的にロックし、使用者に触覚フィードバックを提供する。関節スピンドル404が回転されるとき、インターフェース部材418の回転運動は、スリット426を経由して、インターフェース部材418がその中を辿るとき第2の関節リンク406の長軸方向運動に移される。この関節リンク256の長軸方向運動は、取り付けアセンブリ235上の関節旋回部材236cの長軸方向運動に移され、これは、ツールアセンブリ17を旋回部材284の周りで関節運動させる。関節スピンドル404を45゜の最終位置まで回転することは、案内チャネル432の端部に遭遇する関節スピンドル404の案内部材430およびもっとも遠いノッチ434とインターフェースするプランジャー436に起因してツールアセンブリ17をそこにロックする。このツールアセンブリ17のロックを解くために、ノブ402は反対方向に回され、その-他のノッチ4
34および中央ノッチ434の中立の軸方向平面(例えば、0゜)を通って横切る。ノブ402の回転範囲は±95゜であり、これは、±45゜位置間でツールアセンブリ17を関節運動することに対応する。
【0035】
当業者は、関節スピンドル404が所望の関節角度および/または位置に依存して種々の間隔で配置される任意の数のノッチ434を含み得ることを認識する。上記関節機構400に関して開示される関節角度および最大回転範囲は例示であることがさらに理解されるべきである。
【0036】
図9を参照して、関節機構400と作動可能に連結され、そしてハウジングブロック410内に位置決めされる感知機構450の断面図が示される。この感知機構450は、関節スピンドル404のスロット440内に受容されるような形態であるナブ部分442を有するキャップセンサー444を含む。このキャップセンサー444は、本体部分512と係合される使い捨て装填ユニット16のタイプを感知するように適合されている。特に、このキャップセンサー444は、関節スピンドル404とインターフェースするような形態であり、そしてノブ部分442がスロット440内に受容される場合、その関節運動を防ぐ。この関節運動する使い捨て可能な装填ユニット16は、延長された挿入先端部193を有する(図1A)。関節運動するDLUが、ステープル留め装置10の本体部分512の遠位端中に挿入されるとき、挿入先端部193は、近位方向にキャップセンサー444との係合に移動し、キャップセンサー444およびナブ部分442を近位方向に、そしてスロット440から外に押す。ナブ部分442をスロット444の外側に配置し、関節スピンドル404は自由に回転可能に移動し、ステープル留め装置10の関節運動を行う。関節運動しない使い捨て可能な装填ユニットは、延長された挿入先端部を有さない。従って、関節運動しない使い捨て可能な装填ユニットが挿入されるとき、キャップセンサー444は、ナブ部分442をスロット444から移動するに十分な距離近位方向に退却されない。従って、関節スピンドル404は、スロット444中に位置決めされているキャップセンサー444のナブ部分442によって回転可能に移動することが妨げられ、そして関節スピンドル404は、その中立位置にロックされる。別のタイプの感知機構が、共有に係る「外科用ステープル留め装置」と題する米国特許第5,865,361号に記載され、その内容は、本明細書によって参考として本明細書中に援用される。
【0037】
種々の改変が、本明細書に開示される実施形態になされ得ることが理解される。例えば、DLUは、開示される器具とは対照的に外科用器具の挿入先端部を受容するような形態であり得る。従って、上記の説明は制限的であるとして解釈されるべきではなく、好ましい実施形態の単なる例示である。当業者は、本明細書に添付される特許請求の範囲および思想内でその他の改変を想定する。
【特許請求の範囲】
【請求項1】
明細書に記載の発明。
【請求項1】
明細書に記載の発明。
【図1A】


【図1】
【図2】
【図3】
【図3A】
【図3B】
【図3C】
【図3D】
【図3E】
【図3F】
【図3G】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図1】
【図2】
【図3】
【図3A】
【図3B】
【図3C】
【図3D】
【図3E】
【図3F】
【図3G】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2013−9973(P2013−9973A)
【公開日】平成25年1月17日(2013.1.17)
【国際特許分類】
【出願番号】特願2012−182401(P2012−182401)
【出願日】平成24年8月21日(2012.8.21)
【分割の表示】特願2007−234784(P2007−234784)の分割
【原出願日】平成19年9月10日(2007.9.10)
【出願人】(501289751)タイコ ヘルスケア グループ リミテッド パートナーシップ (320)
【Fターム(参考)】
【公開日】平成25年1月17日(2013.1.17)
【国際特許分類】
【出願日】平成24年8月21日(2012.8.21)
【分割の表示】特願2007−234784(P2007−234784)の分割
【原出願日】平成19年9月10日(2007.9.10)
【出願人】(501289751)タイコ ヘルスケア グループ リミテッド パートナーシップ (320)
【Fターム(参考)】
[ Back to top ]