
関節運動補助具
【課題】簡単な構造で軽量とされて使用者が容易に着脱可能であると共に、動作の補助だけでなく筋力の増強訓練を効果的に行うためにも利用可能とされた、新規な構造の関節運動補助具を提供する。
【解決手段】関節の屈伸を補助する関節運動補助具10において、柔軟性を有する補助力伝達部12の両端部分に対して、使用者の関節を挟んだ一方の部位に装着される第1の装着部14と他方の部位に装着される第2の装着部16とが設けられている一方、補助力伝達部12を通じて第1の装着部14と第2の装着部16との間に引張力を及ぼす駆動源40が設けられていると共に、補助力伝達部12の少なくとも一部が駆動源40による引張力の作用方向で弾性変形可能とされている。
【解決手段】関節の屈伸を補助する関節運動補助具10において、柔軟性を有する補助力伝達部12の両端部分に対して、使用者の関節を挟んだ一方の部位に装着される第1の装着部14と他方の部位に装着される第2の装着部16とが設けられている一方、補助力伝達部12を通じて第1の装着部14と第2の装着部16との間に引張力を及ぼす駆動源40が設けられていると共に、補助力伝達部12の少なくとも一部が駆動源40による引張力の作用方向で弾性変形可能とされている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、使用者の関節の曲げ伸ばしに際して、曲げ伸ばしを実現できるように補助するアシスト力や、曲げ伸ばしに必要な筋力を効率的に強化するための負荷(レジスト力)を使用者に及ぼす関節運動補助具に関するものである。
【背景技術】
【0002】
従来から、筋力を失った身体障害者や筋力が衰えた高齢者の歩行等の動作をサポートするために、特許第4200492号公報(特許文献1)に示されているような装着式の動作補助装置が提案されている。
【0003】
ところで、特許文献1に記載されている装着式動作補助装置は、所謂、外骨格型の補助装置であって、使用者の体の側方に配された硬質の外骨格アームが関節部においてモータで駆動されることにより、外骨格アームを装着された使用者の腕や脚等が外骨格アームと共に動作させられるようになっている。
【0004】
しかしながら、このような硬質の外骨格を用いた補助装置では、使用者の体格(大腿や下腿の長さ等)を正確に計測して、外骨格アームの長さを厳密に調整しなければならず、この調整が不適切な場合、運動時に各関節に過剰な力が加わって、非常に危険な状態になり得る。また、外骨格型補助装置の着脱作業は、動作の補助を必要としている使用者にとって容易ではなく、着脱にかなりの手間と時間が必要になる。それ故、低下した筋力を補って動作を楽にするといった目的で、日常的に装着して使用することは難しかった。しかも、大きな外骨格を有する補助装置を使用する場合、使用者が自らの筋力で外骨格の駆動力に抗して動作することは略不可能であり、筋力の効率的な増強を目的として歩行訓練等にかかる補助装置を用いることは、全く考慮されていない。また、補助装置の動作を制御するために、表面筋電位の測定を行う必要があることから、使用者が多数の表面電極(通常は18個)を装着する必要があるという問題もあった。
【0005】
なお、特開2010−110464号公報(特許文献2)には、比較的に簡易且つ軽量な構造の歩行補助装置が提案されているが、このような特許文献2の構造であっても、大腿部の側面に沿って延びる硬質の外骨格(フレーム)が必要であることから、装着の容易化や軽量化が未だ充分ではない場合があった。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特許第4200492号公報
【特許文献2】特開2010−110464号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明は、上述の事情を背景に為されたものであって、その解決課題は、簡単な構造で軽量とされて使用者が容易に着脱可能であると共に、動作の介助だけでなく筋力の増強訓練を効果的に行うためにも利用可能とされた、新規な構造の関節運動補助具を提供することにある。
【課題を解決するための手段】
【0008】
すなわち、本発明の第1の態様は、関節運動補助具において、柔軟性を有する補助力伝達部の両端部分に対して、使用者の関節を挟んだ一方の部位に装着される第1の装着部と他方の部位に装着される第2の装着部とが設けられている一方、該補助力伝達部を通じて該第1の装着部と該第2の装着部との間に引張力を及ぼす駆動源が設けられていると共に、該補助力伝達部の少なくとも一部が該駆動源による引張力の作用方向で弾性変形可能とされていることを特徴とする。
【0009】
このような第1の態様に記載された関節運動補助具によれば、補助力伝達部が柔軟性を有して変形を許容されていることにより、硬質な外骨格を有する関節運動補助具に比して、使用者が容易に着脱することができる。それ故、加齢や傷病による筋力の低下等によって動作が困難となっている場合に、関節運動補助具から得られる力を補助力として目的とする動作を行ったり、関節運動補助具から得られる力を負荷として目的とする動作に必要な筋力を効率的に増強したりすることが、関節運動補助具の簡単な着脱作業によって実現される。その結果、運動器障害に起因するロコモティブシンドローム(運動器症候群)によって、高齢者等の活動が制限されるのを日常的に防ぐことができると共に、日常生活の中でも高効率の筋力増強トレーニングを行うことができることから、種々の傷病や安静臥床による一時的な筋力の低下等が速やかに解消される。
【0010】
さらに、補助力伝達部が柔軟であることによって、使用者に拘束されている感覚を与え難くなって、装用感の向上が図られる。それ故、関節運動補助具の装用による使用者の肉体的および精神的な負担が低減されて、長時間に亘って連続的に装用することが可能となる。
【0011】
また、補助力伝達部の少なくとも一部が引張力の作用方向で弾性変形可能とされていることにより、駆動源による及ぼされる引張力が第1の装着部と第2の装着部の間で補助力伝達部の弾性によって緩和される。それ故、使用者の関節等に過大な負荷をかけることなく、補助力を緩衝的に作用させることができる。
【0012】
本発明の第2の態様は、第1の態様に記載された関節運動補助具において、使用者の関節の屈伸を検出するセンサが設けられていると共に、該センサの検出結果に基づいて前記駆動源を制御する制御装置が配設されているものである。
【0013】
第2の態様によれば、センサの検出結果に基づいて補助力が自動的に制御されることから、スイッチ操作等の面倒な操作を要することなく、適切な補助を適時に得ることができる。
【0014】
本発明の第3の態様は、第2の態様に記載された関節運動補助具において、前記センサが、使用者の関節の屈伸に伴って該センサに及ぼされる力に基づいて使用者の関節の屈伸を検出可能とされているものである。
【0015】
第3の態様によれば、センサに及ぼされる力に基づいて関節の屈伸を検出することから、高精度な検出が可能とされて、使用者の動作を効率的に補助することが可能となる。
【0016】
本発明の第4の態様は、第3の態様に記載された関節運動補助具において、前記センサが、静電容量型センサおよび抵抗変化型センサの少なくとも1つを含んで構成されているものである。
【0017】
第4の態様において静電容量型センサを採用すれば、センサに及ぼされる力を高精度に検出することができて、動作を適切に補助することができる。更に、静電容量型センサは、力が繰返し入力しても検出精度の低下が小さく、検出結果の再現性が良いことから、耐久性の向上が図られる。更にまた、静電容量型センサは、温度変化に対する検出精度の変化幅が小さく、且つ、温度変化に対して初期値を調節することで検出精度が容易に補正可能であることから、温度変化が大きい場合にも安定した検出が実現される。
【0018】
一方、抵抗変化型センサを採用すれば、センサに及ぼされる力に対して抵抗値が鋭敏に変化することから、時間遅れの少ない制御が可能となって、動作の補助を適時に実行することができる。更に、抵抗変化型センサは、センサに作用する力が小さい場合から大きい場合まで広範囲に亘って検出可能であることから、関節の曲がりが小さい場合と大きい場合の何れに対しても有効な検出結果を得ることができる。
【0019】
本発明の第5の態様は、第1〜第4の何れか1つの態様に記載された関節運動補助具において、前記補助力伝達部が力の伝達方向に延びる帯状とされているものである。
【0020】
第5の態様によれば、補助力伝達部が帯状とされることにより、補助力伝達部の質量が小さくされて、関節運動補助具の軽量化が図られる。その結果、装着のし易さの向上や装着による負荷の低減が実現されて、より取り扱いやすい関節運動補助具を得ることができる。
【0021】
また、補助力伝達部が肉薄とされていることにより、厚さ方向での曲げが許容され易くなることから、補助力伝達部が使用者の体の表面形状に応じて変形することで、異物感が低減されて、装用感が向上する。更に、補助力伝達部が肉薄であれば、関節運動補助具を装着した上から衣服を着用した場合に、補助力伝達部による衣服の凸部が生じ難く、関節運動補助具が目立つのを防いで日常生活で常用し易くなる。
【0022】
本発明の第6の態様は、第1〜第5の何れか1つの態様に記載された関節運動補助具において、前記補助力伝達部が衣服状の本体部に一体的に設けられており、該本体部の着用によって該補助力伝達部が使用者の関節を跨いで配設されるものである。
【0023】
第6の態様によれば、補助力伝達部が衣服状の本体部と一体的に設けられていることにより、補助力伝達部の装着と所定位置への配置が、本体部を衣服と同様に着用することによって簡単に完了する。それ故、筋力の低下した高齢者や傷病者であっても日常的に使用することが容易であると共に、駆動源による引張力が適切に伝達されて目的とする動作補助を有効に得ることができる。
【0024】
本発明の第7の態様は、第1〜第6の何れか1つの態様に記載された関節運動補助具において、前記補助力伝達部における弾性変形可能な部分が、前記駆動源による引張力の作用方向の弾性に比してそれと直交する方向の弾性が小さくされているものである。
【0025】
第7の態様によれば、引張力の作用方向である長さ方向では、駆動源による引張力が充分に緩衝されて伝達されることにより、使用者の関節等への負荷を抑えることができる。また、引張力の作用方向と直交する幅方向では、変形が抑えられることによって、力の選択的な伝達が実現されると共に、形状の安定性や耐久性の向上が図られる。
【0026】
本発明の第8の態様は、第1〜第7の何れか1つの態様に記載された関節運動補助具において、前記補助力伝達部が使用者の股関節と膝関節の少なくとも一方を跨いで配設されているものである。
【0027】
第8の態様によれば、脚部に補助力が及ぼされることによって、股関節と膝関節少なくとも一方の屈伸が補助される。それ故、例えば、関節の屈伸に必要な筋力の不足を補う補助力(アシスト力)や、関節の屈伸に必要な筋力に対して抵抗負荷として作用する補助力(レジスト力)によって、脚部の運動の容易化や脚部の筋力の強化を実現することができる。
【0028】
また、本発明の第9の態様は、第8の態様に記載された関節運動補助具において、前記第1の装着部が使用者の大腿と膝関節の少なくとも一方に取り付けられていると共に、前記第2の装着部が使用者の腰部に取り付けられており、前記補助力伝達部が股関節を跨いで配設されているものである。
【0029】
第9の態様によれば、駆動源による引張力が、股関節の屈伸に必要とされる筋力を補強するためのアシスト力や、股関節周囲筋等の筋力を効率的に増強するためのレジスト力として作用することから、股関節の屈伸運動を伴う歩行動作等が、関節運動補助具によって補助される。
【0030】
本発明の第10の態様は、第9の態様に記載された関節運動補助具において、前記駆動源が前記第2の装着部に取り付けられているものである。
【0031】
第10の態様によれば、駆動源が、股関節の屈伸時に大腿よりも動きの小さい腰部に取り付けられた第2の装着部で支持されることから、駆動源が安定して支持されると共に、比較的に重量が大きくなり易い駆動源が動きの小さい腰部に配設されることで、駆動源に作用する慣性力等が使用者の脚部への負荷になるのも防止される。
【0032】
また、第1の装着部が大腿又は膝関節に取り付けられると共に、駆動源を支持する第2の装着部が腰部に取り付けられて、それら第1の装着部と第2の装着部が何れも股関節に近い位置に配設される。それ故、股関節を跨いで配設される補助力伝達部の長さを短くすることができて、関節運動補助具の軽量化や小型化が有利に図られると共に、関節運動補助具を容易に装着可能とすることができる。
【0033】
本発明の第11の態様は、第1〜第10の何れか1つの態様に記載された関節運動補助具において、前記駆動源による引張力が、関節の屈伸運動に必要な力を補強するアシスト力として作用するものである。
【0034】
第11の態様によれば、関節の屈伸運動に必要とされる筋力が低下している場合に、駆動源による引張力が補助力伝達帯を介して伝達されて、アシスト力として作用することにより、筋力の不足が補われて、目的とする関節の屈伸運動を行うことが可能となる。これによれば、例えば、加齢等による筋力の低下によって運動が困難な場合に、必要に応じて使用者の動作を補助して、容易に運動可能な状態を維持することができる。その結果、筋力の低下によって活動が制限されるのを防ぐことができると共に、更なる筋力の低下を防いで、症状が悪化するのを防止することが可能となる。
【0035】
本発明の第12の態様は、第1〜第11の何れか1つの態様に記載された関節運動補助具において、前記駆動源による引張力が、関節の屈伸運動に必要な力に抗するレジスト力として作用するものである。
【0036】
第12の態様によれば、例えば、関節の屈伸運動に必要とされる筋力が傷病等によって一時的に低下している場合に、駆動源による補助力を敢えて動作に要する力と抗する方向で作用させて負荷(レジスト力)として作用させることにより、低下した筋力の増強によって機能回復を図るリハビリテーションを効率的に実施することができる。また、レジスト力の作用によって効果的に筋力を増強できることから、健常者が用いて、運動量の不足等で筋力が低下するのを防ぐといった目的を効率的に達成することも可能である。
【発明の効果】
【0037】
本発明によれば、関節を挟んで各一方の側に配設される第1の装着部と第2の装着部の間に補助力伝達部を介して引張力を及ぼすことにより、関節の屈伸を補助して、筋力の不足を補う、或いは筋力の効率的な増強を図ることができる。しかも、補助力伝達部が駆動源による引張力の作用方向で弾性変形可能とされており、駆動源による引張力が緩衝されて使用者に及ぼされることから、関節に対する過大な負荷が防止されて、使用者の負担が低減される。更に、補助力伝達部が柔軟性を有していることにより、必要に応じて容易に着脱できると共に、優れた装用感で長時間の使用が可能となる。
【図面の簡単な説明】
【0038】
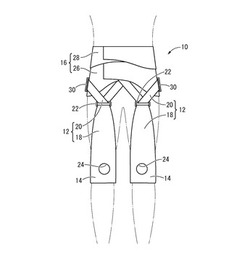
【図1】本発明の第1の実施形態としての関節運動補助具を示す正面図。
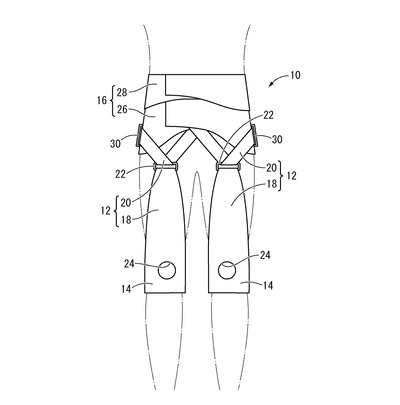
【図2】図1に示された関節運動補助具の背面図。
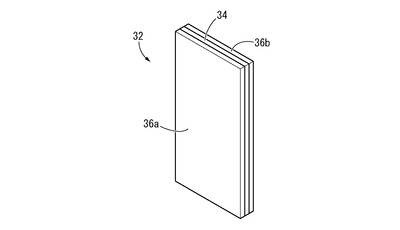
【図3】図1に示された関節運動補助具を構成する静電容量型センサの斜視図。
【図4】図2に示された関節運動補助具の背面図において、駆動装置の内部構造を示す図。
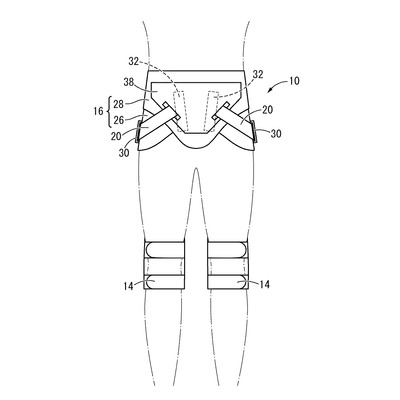
【図5】本発明の第2の実施形態としての関節運動補助具を示す正面図。
【図6】図5に示された関節運動補助具の背面図。
【図7】本発明の第3の実施形態としての関節運動補助具を示す正面図。
【図8】図7に示された関節運動補助具の背面図。
【図9】本発明の第4の実施形態としての関節運動補助具を示す正面図。
【図10】本発明の別の1実施形態としての関節運動補助具を示す正面図。
【図11】本発明のまた別の1実施形態としての関節運動補助具を示す背面図。
【発明を実施するための形態】
【0039】
以下、本発明の実施形態について、図面を参照しつつ説明する。
【0040】
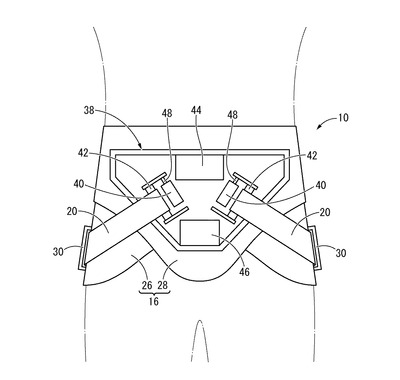
図1,図2には、本発明の第1の実施形態としての関節運動補助具10が示されている。関節運動補助具10は、股関節の屈伸を補助するものであって、股関節を跨いで延びる左右一対の補助力伝達部としての補助力伝達帯12,12の両端部分に、股関節を挟んだ一方の側に取り付けられる第1の装着部14と、股関節を挟んだ他方の側に取り付けられる第2の装着部16とが、それぞれ設けられた構造を、有している。なお、図1,図2では、関節運動補助具10が使用者の装着状態で図示されており、使用者の輪郭線が2点鎖線で示されている。また、以下の説明において、原則として、前面とは使用者の腹部側の面(正面)を、後面とは使用者の背部側の面(背面)を、上下とは鉛直上下方向である図1中の上下を、それぞれ言う。また、以下の説明において、「アシスト力」とは、動作に必要とされる力を補う方向で作用する補助力のことを、「レジスト力」とは、動作に必要とされる力に抗する方向で作用する補助力のことを言う。
【0041】
より詳細には、補助力伝達帯12は、それぞれ布地で形成された第1の牽引帯18と第2の牽引帯20を、金属製の連結金具22で連結した構造とされており、第1の牽引帯18および第2の牽引帯20による構成部分が柔軟に変形可能とされている。
【0042】
第1の牽引帯18は、一方の端部側(図1中、上側)に向かって次第に狭幅となる肉薄帯状の布地で形成されており、関節運動補助具10の装着状態において使用者の大腿の前面を覆うように配設される。また、第1の牽引帯18は、後述する電動モータ40による引張力の作用方向となる長さ方向(図1中、上下方向)で弾性変形可能とされていると共に、幅方向(図1中、左右方向)で弾性が小さくされて変形が制限されており、長さ方向と幅方向で入力に対する変形量の異方性を有している。なお、第1の牽引帯18は、長さ方向において、0.3kgf/cm以上且つ0.5kgf/cm以下の弾性を有していることが望ましい。
【0043】
また、第1の牽引帯18の上端にはリング状の連結金具22が取り付けられており、第1の牽引帯18が連結金具22を介して第2の牽引帯20に連結されている。第2の牽引帯20は、略一定の幅寸法を有する帯状であって、伸縮性の小さい繊維を用いた布地で形成されている。第2の牽引帯20は、中間部分が連結金具22に挿通されて第1の牽引帯18と連結されており、もって、補助力伝達帯12が構成されている。なお、第2の牽引帯20は、必ずしも伸縮性を抑えられたものでなくても良く、第1の牽引帯18と同様の弾性繊維等で形成された伸縮性を有するものも採用され得る。
【0044】
また、補助力伝達帯12の第1の牽引帯18の下方には、第1の装着部14が設けられている。第1の装着部14は、膝関節を保護するために用いられるスポーツ用サポータ状であって、伸縮性を有する布地等で形成されており、使用者の膝関節に巻き付けられて装着される。また、第1の装着部14は、第1の牽引帯18と一体形成されており、第1の装着部14の前面部分から第1の牽引帯18が上方に向かって延び出している。なお、第1の装着部14には、部分的な貫通孔24が設けられており、貫通孔24が使用者の膝頭に位置決めされることによって、膝関節の屈伸を妨げないようになっている。
【0045】
また、補助力伝達帯12の第2の牽引帯20の両端部は、第2の装着部16に取り付けられている。第2の装着部16は、それぞれ腰部に装着される伝達帯支持ベルト26と駆動装置支持ベルト28を有しており、第2の牽引帯20の一方の端部が伝達帯支持ベルト26に取り付けられていると共に、他方の端部が駆動装置支持ベルト28に取り付けられている。
【0046】
伝達帯支持ベルト26は、伸縮性の小さい帯状の布地で形成されており、使用者の腰部に巻き付けられて、両端部が面ファスナやスナップ,フック等で連結されることにより、使用者の腰部に装着される。また、伝達帯支持ベルト26には、リング状を呈する一対のガイド金具30,30が設けられており、伝達帯支持ベルト26の腰部への装着状態において、腰部の左右両側に配置される。そして、第2の牽引帯20の一方の端部が、伝達帯支持ベルト26の前面部分に対して、縫合や溶着、スナップやフック、面ファスナ等の手段を用いて取り付けられている。
【0047】
さらに、伝達帯支持ベルト26には、センサとしての一対の静電容量型センサ32が取り付けられている。静電容量型センサ32は、例えば特開2010−43880号公報や特開2009−20006号公報等に示されているように、弾性変形を許容された柔軟な静電容量変化型のセンサであって、図3に示されているように、誘電性の弾性材で形成された誘電体層34の両面に、導電性の弾性材で形成された一対の電極膜36a,36bを設けた構造を有している。また、静電容量型センサ32は、一方の電極膜36aが伝達帯支持ベルト26の背部の内面に固着されることにより、伝達帯支持ベルト26に取り付けられている。
【0048】
そして、伝達帯支持ベルト26の装着状態において、静電容量型センサ32は、他方の電極膜36bが使用者の臀部に重ね合わされて、臀部と伝達帯支持ベルト26の間に挟み込まれる。これにより、静電容量型センサ32は、股関節の屈伸による作用圧力の変化を一対の電極膜36a,36bの接近/離隔に伴う静電容量の変化として検出して、検出結果を後述する駆動装置38の制御装置46に出力する。なお、静電容量型センサ32は、図2に破線で示されているように、左右一対が配設されており、左右の臀部に各1つの静電容量型センサ32が重ね合わされている。また、図3では、誘電体層34および一対の電極膜36a,36bの厚さ寸法が、長さ寸法および幅寸法に比して、大きく示されているが、好適には、それら誘電体層34および一対の電極膜36a,36bは、何れも薄膜状とされて、臀部に違和感を与えることなく配設可能とされる。
【0049】
一方、駆動装置支持ベルト28は、図1,図2に示されているように、伝達帯支持ベルト26と同様に、伸縮性の小さい帯状の布地で形成されており、使用者の腰部に巻き付けられて、両端部が面ファスナやスナップ、フック等で連結されることにより、使用者の腰部に装着される。また、駆動装置支持ベルト28は、背面部分が正面部分よりも下方まで延び出して大きな面積を有しており、その背面部分に駆動装置38が固定されている。
【0050】
駆動装置38は、図4に示されているように、駆動源としての電動モータ40と、電動モータ40によって回転駆動される回転軸42と、電動モータ40に電力を供給するバッテリー等の電源装置44と、静電容量型センサ32の検出結果に基づいて電動モータ40を制御する制御装置46とを有している。
【0051】
電動モータ40は、一般的な電動機であって、電源装置44からの通電によって駆動軸48の回転駆動力を発生するようになっている。また、電動モータ40の駆動軸48に及ぼされた回転駆動力は、図示しない減速歯車列を介して、回転軸42に伝達される。回転軸42は、周方向への回転を許容されるように支持された円形軸状の部材であって、その外周面に第2の牽引帯20の他方の端部が固定されている。これにより、第2の牽引帯20の他方の端部は、駆動装置38を介して駆動装置支持ベルト28に取り付けられており、もって、補助力伝達帯12が股関節を跨いで配設されている。
【0052】
そして、回転軸42が電動モータ40の駆動軸48から及ぼされた駆動力によって周方向一方に回転させられることにより、補助力伝達帯12の第2の牽引帯20が回転軸42に巻き取られる。これにより、電動モータ40による駆動力が補助力伝達帯12の長さ方向(第1の牽引帯18および第2の牽引帯20の長さ方向)に伝達されて、第1の装着部14と第2の装着部16の間に引張力として及ぼされる。上記から明らかなように、補助力伝達帯12は、電動モータ40の駆動力の伝達方向に延びている。一方、回転軸42が電動モータ40によって周方向他方に回転させられると、回転軸42による補助力伝達帯12の巻き取りが解除されて、第1の装着部14と第2の装着部16の間で引張力が解除される。
【0053】
また、電動モータ40の制御は、制御装置46が、電源装置44から電動モータ40への通電の有無や通電方向(駆動軸48の回転方向)が制御装置46によって制御されることで実行されている。制御装置46は、CPUやRAM,ROM等を備えており、静電容量型センサ32の検出結果(出力信号)に基づいて使用者の股関節の屈曲運動および伸展運動を検出して、検出した股関節の運動に応じて電動モータ40への通電を制御する。これにより、電動モータ40の駆動力に基づいて第1の装着部14と第2の装着部16の間に及ぼされる引張力が、制御装置46によって調節されている。なお、本実施形態では、制御装置46が、歩行動作の段階(例えば、股関節を屈曲して後足を前方に運ぶ段階や股関節を伸展して前足で地面を蹴る段階等)を特定して、特定した歩行動作の段階に応じて電動モータ40への通電を制御するようになっている。
【0054】
かくの如き構造とされた関節運動補助具10を装用すれば、股関節を屈曲する際に、股関節の屈曲運動に必要な力を補強するように補助力(アシスト力)が及ぼされて、股関節の屈伸を伴う動作が補助される。即ち、制御装置46は、静電容量型センサ32の検出結果に基づいて使用者が股関節を屈曲しようとしていることを特定すると、電源装置44から電動モータ40に通電して回転軸42を周方向一方に回転させる。これにより、第2の牽引帯20が回転軸42によって巻き取られて、第2の牽引帯20の実質的な長さが短くなることから、第2の牽引帯20の中間部分に外挿された連結金具22が第2の装着部16側(上側)に引き寄せられて変位させられる。そして、連結金具22に取り付けられた第1の牽引帯18を通じて第1の装着部14に引張力が及ぼされて、膝関節に装着された第1の装着部14が腰部に装着された第2の装着部16側に引き寄せられる。その結果、膝関節を重力に抗して腰部側に引き付けるようにアシスト力が作用して、股関節の屈曲運動が補助される。なお、静電容量型センサ32の検出値に基づいて、制御装置46が回転軸42の回転量(電動モータ40への通電時間)を調節すれば、使用者が行おうとする動作に対して過不足のないアシスト力が提供される。
【0055】
一方、制御装置46は、静電容量型センサ32の検出結果に基づいて使用者が股関節を伸展させようとしていることを特定すると、電源装置44から電動モータ40に通電して回転軸42を周方向他方に回転させる。これにより、回転軸42による第2の牽引帯20の巻取りが解除されて、第2の牽引帯20の実質的な長さが長くなることから、第2の牽引帯20の中間部分に外挿された連結金具22が自重等によって第2の装着部16から離隔する方向(下側)に変位する。そして、連結金具22に取り付けられた第1の牽引帯18を通じて第1の装着部14に及ぼされていた引張力が解除されて、重力の作用等に基づいて第1の装着部14が第2の装着部16から離隔する。その結果、股関節の伸展運動が関節運動補助具10によって妨げられるのが防止される。
【0056】
このように、関節運動補助具10を装用すれば、股関節を屈曲する際に必要とされる力の一部が電動モータ40の発生力によって補われることから、例えば、歩行時に股関節を屈曲して後足を前方に運ぶ動作をする際に、小さな筋力で目的とする動作を行うことが可能とされる。従って、関節運動補助具10を用いれば、加齢や傷病によって使用者が動作を行うための充分な筋力を備えていない場合にも、目的とする動作をスムーズに行うことができて、使用者の活動が制限されるのを防ぐことが可能となる。
【0057】
また、電動モータ40の発生駆動力をアシスト力として使用者の脚部に伝達する経路上に設けられた補助力伝達帯12の第1の牽引帯18は、力の伝達方向で弾性変形可能とされている。これにより、電動モータ40の発生駆動力は、第1の牽引帯18の弾性変形によって緩和されてから、使用者の脚部に及ぼされる。それ故、電動モータ40の発生駆動力がダイレクトに伝達される場合に比して、使用者の関節等への負荷が軽減されて、筋を痛める等といった問題が生じるのを防ぐことができる。特に本実施形態では、使用者の脚部に及ぼされるアシスト力が2kgf〜5kgf程度の比較的に小さな力とされており、強制的に動作をさせるのではなく、あくまでも動作に必要な筋力の不足を補うという思想に基づいていることから、使用者の身体に負担をかけることなく、必要な補助を行うことができる。
【0058】
しかも、本実施形態では、第1の牽引帯18の力の伝達方向での弾性が、0.3kgf/cm〜0.5kgf/cmの間に設定されている。これにより、電動モータ40の発生駆動力が充分に緩衝されて、使用者の脚部に過大な負荷が作用するのを回避できると共に、使用者の動作を充分に実現し得るだけの有効なアシスト力が使用者の脚部に伝達されて、動作を効果的に補助することができる。
【0059】
さらに、第1の牽引帯18は、力の伝達方向と略直交する方向での変形が制限されており、第1の牽引帯18と一体形成された第1の装着部14の周方向での伸縮(拡径変形乃至は縮径変形)が抑えられて、形状の安定性が高められている。これにより、電動モータ40による引張力の作用時に、第1の装着部14が膝関節から外れることなく保持されて、アシスト力が脚部に対して有効に伝達される。
【0060】
また、関節運動補助具10によるアシスト力は、股関節の屈曲運動に際して発揮される一方で、股関節の伸展運動に際して解除される。これにより、関節運動補助具10を装用すれば、起立状態において重力に抗した運動が必要とされる股関節の屈曲運動が補助される一方、起立状態において重力の作用で補助される股関節の伸展運動では、アシスト力が抗力として作用してしまうことがなく、スムーズな動作が実現される。従って、股関節の屈曲と伸展を繰り返し行う歩行動作等においても、動作の妨げとなることなく、必要なアシスト力を適時に提供して動作を適切に補助することができる。
【0061】
本実施形態の関節運動補助具10において、このような使用者の動作状態に応じた補助の切り替えは、静電容量型センサ32の検出結果に基づいて制御装置46が自動的に実行するようになっている。それ故、使用者は、アシスト力を付与するタイミングや付与するアシスト力の大きさ等を手動で制御する必要がなく、適切な補助を適時に得ることができる。
【0062】
しかも、センサとして静電容量型センサ32が採用されていることにより、高精度な検出結果を得ることができる。それ故、例えば、検出結果に基づいてアシスト力の大きさ等を調節すれば、より適切な補助が可能となる。更に、静電容量型センサ32では、温度変化に対する検出精度の低下が小さいと共に、温度変化に対する補正が容易であることから、温度変化が大きい場合にも正しい検出結果を安定して得ることができる。加えて、静電容量型センサ32では、繰返しの入力に対する検出精度の低下が小さいことから、充分な耐久性を確保することができて、日常生活での常用等が実現される。
【0063】
また、本実施形態における補助力伝達部が、帯形状を有する肉薄の布で形成された補助力伝達帯12とされていることにより、充分な柔軟性が付与されており、硬質の外骨格を有する関節運動補助具に比して、容易に着脱することができる。即ち、硬質の外骨格を使用者に装着する場合、使用者は外骨格の形状に合わせて関節の曲げ角度を調節する必要があるし、着座して装着することは難しい場合も多い。しかし、本実施形態の関節運動補助具10は、第1の装着部14と第2の装着部16を連結する補助力伝達帯12が柔軟で必要に応じて撓むことから、補助力伝達帯12を充分に長くしておけば、使用者の関節の曲げ角度がどの程度であったとしても、第1の装着部14と第2の装着部16をそれぞれ適切な位置に取り付けることが可能である。しかも、補助力伝達帯12が柔軟であることによって、例えば、股関節を屈曲した着座姿勢で第1の装着部14と第2の装着部16をそれぞれ装着することが可能とされており、楽な姿勢で着脱作業を行うことができる。
【0064】
さらに、肉薄帯形状の布で形成された補助力伝達帯12を採用することにより、関節運動補助具10が軽量とされて、筋力の低下した高齢者等でも容易に取り扱うことができる。しかも、本実施形態では、第1の装着部14および第2の装着部16もそれぞれ布製とされていることから、関節運動補助具10全体がより軽量化とされており、着脱作業等を含む取回し性の更なる向上が図られている。
【0065】
更にまた、補助力伝達帯12が肉薄の布製とされていることにより、装着状態において補助力伝達帯12が使用者の体表面の形状に沿って厚さ方向で容易に湾曲する。それ故、関節運動補助具10によれば、良好な装用感が実現されると共に、関節運動補助具10の上に衣服を重ねて着用した場合に補助力伝達帯12が凹凸を生じて目立つのを防いで、日常生活において気軽に使用することができる。本実施形態では、第1の装着部14および第2の装着部16もそれぞれ肉薄とされており、関節運動補助具10の上に衣服を重ねて着用する際に、視覚的な違和感が生じるのを抑えることで日常においてより使用し易くなっている。
【0066】
また、第1の装着部14が膝関節に取り付けられると共に、第2の装着部16が腰部に取り付けられることにより、補助力伝達帯12の長さが必要以上に長くなるのを防いで関節運動補助具10の小型化を図りつつ、アシスト力が脚部に対して効率的に及ぼされる。蓋し、大腿の揺動時に支点となる股関節から作用点となる第1の装着部14までの離隔距離が大きくされると、引張力が第1の装着部14に対して効率的に作用するからである。しかも、駆動装置38が歩行時に運動量の少ない腰部に設けられていることにより、駆動装置38が歩行動作の妨げになるのを防止できる。
【0067】
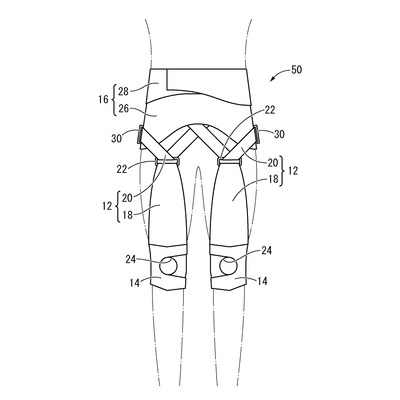
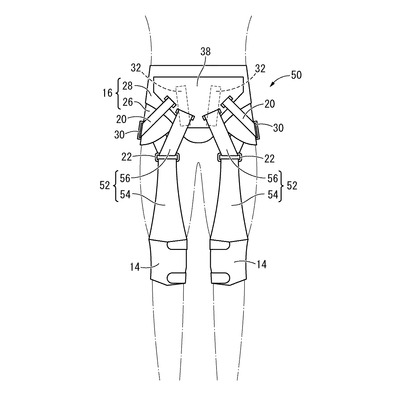
図5,図6には、本発明の第2の実施形態としての関節運動補助具50が示されている。関節運動補助具50は、補助力伝達部としての補助力伝達帯12および補助力伝達帯52と、その両端に設けられた第1の装着部14および第2の装着部16を含んで構成されている。なお、以下の説明において、第1の実施形態と実質的に同一の部材および部位については、同一の符号を付すことにより、説明を省略する。
【0068】
より詳細には、補助力伝達帯52は、第3の牽引帯54と第4の牽引帯56を含んで構成されており、使用者の背面側において股関節を跨いで配設されて、第1の装着部14と第2の装着部16を連結している。
【0069】
第3の牽引帯54は、第1の装着部14の背面側の上端から上方に向かって延び出しており、下端が第1の装着部14に固定されていると共に、上端が連結金具22に固定されている。なお、第3の牽引帯54は、第1の装着部14とは別体で形成されて縫合等の手段で連結されており、第3の牽引帯54の要求性能と第1の装着部14の要求性能が何れも高度に実現されるようになっている。また、第3の牽引帯54は、上方に向かって次第に狭幅となっており、股関節の屈伸に際して大腿筋の変形等を許容する形状とされている。
【0070】
また、第3の牽引帯54に取り付けられた連結金具22には、第4の牽引帯56が挿通されている。第4の牽引帯56は、第2の牽引帯20と同様に、略一定の幅寸法を有する肉薄の帯状とされており、伸縮し難い繊維で形成されて弾性変形を制限されている。この第4の牽引帯56は、その中間部分が連結金具22に挿通されている一方、一方の端部が伝達帯支持ベルト26に対して縫合等の手段で固定されていると共に、他方の端部が駆動装置38の回転軸42に固定されている。これにより、第4の牽引帯56の中間部分に第3の牽引帯54が連結されていると共に、第1の装着部14と第2の装着部16が第3,第4の牽引帯54,56によって相互に連結されている。
【0071】
そして、回転軸42が電動モータ40の駆動力によって周方向一方の側に回転させられて、第4の牽引帯56が回転軸42で巻き取られることにより、第3,第4の牽引帯54,56を通じて第1の装着部14と第2の装着部16の間に引張力が及ぼされる。一方、回転軸42が周方向他方の側に回転させられて、第4の牽引帯56の回転軸42による巻取りが解除されることにより、上記引張力が解除される。なお、第4の牽引帯56に引張力を及ぼすための電動モータ40が、第2の牽引帯20に引張力を及ぼすための電動モータ40とは別に設けられていても良いし、共通の電動モータ40による引張力が第2の牽引帯20と第4の牽引帯56の何れか一方に対して選択的に及ぼされるようになっていても良い。
【0072】
そして、使用者が股関節を屈曲する際に、第1の装着部14を第2の装着部16側に引き寄せる方向の引張力を第3,第4の牽引帯54,56を通じて及ぼすことにより、股関節の屈曲運動に必要な力に対して抗する方向で作用する補助力(レジスト力)が脚部に及ぼされる。これにより、電動モータ40の駆動力が股関節を屈曲する運動に対する負荷(抵抗)として作用することから、歩行動作等といった股関節の運動を伴う動作に必要な筋力が、効率的に増強される。更に、股関節を伸展する際には、第3,第4の牽引帯54,56を通じて第1の装着部14と第2の装着部16の間に及ぼされる引張力が解除されて、引張力がアシスト力として作用するのが防止される。これにより、股関節周囲筋等の筋力の増強が効率的に実現される。なお、第1,第2の牽引帯18,20を通じて第1の装着部14に及ぼされる引張力を、股関節を屈曲する際に解除すると共に、股関節を伸展する際に作用させるように制御すれば、股関節を伸ばす運動に対しても負荷を加えることができて、筋力の増強をより効果的に実現することができる。
【0073】
一方、引張力の作用と解除の制御を逆にすれば、動作を介助するための補助力(アシスト力)を効果的に得ることも可能である。即ち、第1の実施形態で示された第1,第2の牽引帯18,20によるアシスト力の付与に加えて、第3,第4の牽引帯54,56を通じて第1の装着部14に及ぼされる引張力を、股関節の屈曲運動の際に解除すると共に、股関節の伸展運動の際に作用させることにより、股関節を曲げる運動に対して第1,第2の牽引帯18,20を通じてアシスト力が及ぼされると共に、股関節を伸ばす運動に対して第3,第4の牽引帯54,56を通じてアシスト力が及ぼされる。
【0074】
要するに、本実施形態の関節運動補助具50によれば、使用者の要求に応じて、歩行等の動作の介助するための補助具としての機能と、リハビリテーション等において股関節周囲筋の筋力増強を効率的に図るための補助具としての機能との何れかを、選択して利用することができる。しかも、関節運動補助具50では、股関節を曲げる運動だけでなく伸ばす運動に対しても補助力が及ぼされることから、使用者の動作がより効果的に補助される。
【0075】
また、関節運動補助具50では、第3,第4の牽引帯54,56が設けられて、股関節の伸展運動に対しても補助力が発揮されることから、関節運動補助具50を着座状態で装着した場合には、装着後に着座姿勢のままで関節運動補助具50による動作補助を開始させて、立ち上がり動作を補助させることも可能である。
【0076】
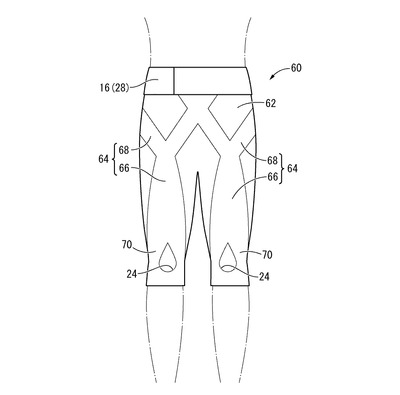
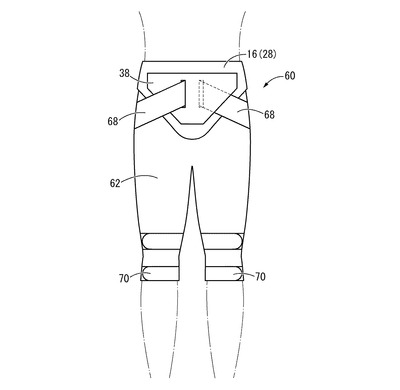
また、図7,図8には、本発明の第3の実施形態としての関節運動補助具60が示されている。この関節運動補助具60は、腰部から膝下までを覆って体表面に密着するパンツ(レギンス)状を呈する本体部62を有している。この本体部62は、使用者の体型に応じて弾性変形を許容される伸縮性に優れた布地で形成されており、使用者の体型等に応じて変形する。
【0077】
また、本体部62には、補助力伝達部64が設けられている。補助力伝達部64は、肉薄帯状の布地であって、大腿の前面を覆うように上下に延びる第1の牽引部66と、第1の牽引部66の上端から所定の角度で左右に分岐して斜め上方に延び出す第2の牽引部68とを、一体的に備えている。また、補助力伝達部64は、第1の牽引部66と第2の牽引部68の何れも、長さ方向で弾性変形を許容されていると共に、幅方向で弾性変形を制限されている。この補助力伝達部64は、本体部62と一体形成されており、機織時に一体的に設けられる。
【0078】
また、補助力伝達部64の第1の牽引部66の下方には、第1の装着部70が設けられている。第1の装着部70は、略環状とされており、膝関節を全周に亘って略覆うように装着される。また、第1の装着部70は、第1の牽引部66と同じ布地を用いて、本体部62および第1の牽引部66と一体的に設けられており、周方向での弾性変形が制限されて膝関節からのずれが抑えられている。また、第1の装着部70は、膝関節の前面を覆う部分が本体部62に織り込まれて一体化していると共に、膝関節の側面から後面を覆う部分が、左右の側面部分において本体部62から分離してそれぞれ帯状に延び出している。そして、本体部62から分離した第1の装着部70の左右一対の帯状部分には、図示しない面ファスナが設けられており、それら帯状部分を必要に応じて周方向に引っ張って膝関節を締め付けてから、面ファスナで相互に連結することにより、第1の装着部70が膝関節に対し位置決めされるようになっている。なお、第1の装着部70の正面中央部分には、本体部62と同様の伸縮性に優れた素材で形成された部分が設けられており、その部分が膝頭を覆うように配置されることで、膝関節の拘束が防止されている。
【0079】
また、補助力伝達部64の第2の牽引部68は、左右に分岐して内側に延びる端部が、駆動装置支持ベルト28によって締め付けられて保持されている一方、左右に分岐して外側に延びる側が、腰部の側方で本体部62から分離して、端部が帯状をなしており、駆動装置38の回転軸42に固定されている。なお、図中には示されていないが、本実施形態の駆動装置38は、駆動軸48の回転方向を制御装置46によって制御される1つの電動モータ40を備えており、左右の補助力伝達部64,64の各一方に連結される回転軸42,42が、1つの電動モータ40によって回転させられる。また、本実施形態では、左側の補助力伝達部64が駆動装置38に対して背面側から挿入されて回転軸42に固定されていると共に、右側の補助力伝達部64が駆動装置38に対して駆動装置支持ベルト28との間から挿入されて回転軸42に固定されている。以上により、補助力伝達部64は、下端部が第1の装着部14に取り付けられると共に、上端部が第2の装着部としての駆動装置支持ベルト28に取り付けられており、股関節を跨いで配設されている。
【0080】
このような構造とされた関節運動補助具60によれば、第1の実施形態に示された関節運動補助具10と同様に、補助力伝達部64を通じて第1の装着部70と第2の装着部16の間に引張力を及ぼして、歩行動作を含む股関節の運動を補助することができる。
【0081】
しかも、関節運動補助具60は、パンツ状の本体部62に補助力伝達部64が織り込まれて一体的に設けられていることから、パンツと同様の簡単な作業で容易に着脱することができる。更に、本体部62を正しく着用するだけで、補助力伝達部64が正確な位置に配置されて、補助力を効率よく得ることが可能となる。加えて、衣服の下に装着しても、凹凸を生じたり嵩張るといった不具合が生じ難く、他者に視覚的な違和感を与え難いと共に、使用者の動作が拘束されたり、衣服の選択自由度が小さくなるといった問題を回避することができる。
【0082】
なお、本発明の関節運動補助具を上半身の関節の動作を補助するために用いる場合には、シャツ状の本体部に本実施形態と同様に補助力伝達部を一体的に設ければ良い。要するに、動作を補助すべき関節に応じて、その関節を覆うように着用される衣服状の本体部を準備すれば良い。
【0083】
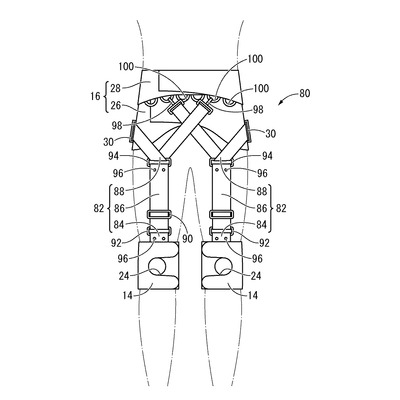
図9には、本発明の第4の実施形態としての関節運動補助具80が示されている。関節運動補助具80は、第1の装着部14と第2の装着部16を補助力伝達部としての補助力伝達帯82で連結した構造を有している。
【0084】
補助力伝達帯82は、第1の牽引帯84と第2の牽引帯86と第3の牽引帯88を含んで構成されている。第1〜第3の牽引帯84,86,88は、それぞれ略一定の幅寸法で延びる肉薄帯状の布地で形成されており、第1,第2の牽引帯84,86が長さ方向で弾性変形可能とされていると共に、第3の牽引帯88が長さ方向での弾性変形を制限されている。また、第2の牽引帯86にはコキ90が設けられており、体格に応じて第2の牽引帯86の長さを簡単に調節することが可能とされている。
【0085】
そして、第1の牽引帯84の上端と第2の牽引帯86の下端がそれぞれ環状の第1の連結金具92に取り付けられており、それら第1の牽引帯84と第2の牽引帯86が第1の連結金具92を介して連結されている。更に、第2の牽引帯86の上端が環状の第2の連結金具94に取り付けられていると共に、第3の牽引帯88が第2の連結金具94に挿通されており、第2の牽引帯86の上端と第3の牽引帯88の中間部分が第2の連結金具94を介して連結されている。なお、第1,第2の牽引帯84,86は、第1,第2の連結金具92,94に対して、取外し不能に固定されても良いが、フックやスナップ、面ファスナ等を用いて取外し可能に取り付けられることが望ましい。本実施形態では、スナップ96を用いて取外し可能な態様で取り付けられている。
【0086】
また、第1の牽引帯84の下端は、第1の装着部14の正面部分の上端に取り付けられている。なお、第1の牽引帯18の第1の装着部14への取付けは、縫合や接着によって固定されていても良いが、フックやスナップ、面ファスナ等によって着脱可能に取り付けられていることが望ましい。
【0087】
さらに、第3の牽引帯88は、一方の端部が、腰部の側方から後方に回り込んで延びて、駆動装置38の回転軸42に固定されていると共に、他方の端部が、腰部の前方で第2の装着部16の駆動装置支持ベルト28に取り付けられている。より詳細には、第3の牽引帯88の他方の端部には、フック金具98が取り付けられており、駆動装置支持ベルト28の前面部分に設けられた環状乃至は半環状の取付金具100に着脱可能な状態で取り付けられる。なお、駆動装置支持ベルト28には、複数の取付金具100が周方向で並んで設けられており、フック金具98を取り付ける取付金具100をそれら複数の中から適当に選択することで、第3の牽引帯88の長さを調節することができる。
【0088】
以上により、関節運動補助具80では、第1の装着部14と第2の装着部16が第1〜第3の牽引帯84,86,88を含んで構成された補助力伝達帯82によって連結されており、補助力伝達帯82を通じて第1の装着部14と第2の装着部16の間に引張力が及ぼされる。そして、第1の実施形態と同様に、股関節の屈伸運動に際して引張力を利用したアシスト力が及ぼされて、歩行動作が補助されるようになっている。
【0089】
また、本実施形態では、補助力伝達帯82が第1〜第3の牽引帯84,86,88で構成されており、それぞれが連結金具92,94によって連結されている。それ故、第1〜第3の牽引帯84,86,88の何れかが損傷した場合等には、損傷部分だけを連結金具92,94から取り外して交換することが可能とされており、メンテナンス性に優れている。
【0090】
また、使用者の体格(大腿の長さ等)に応じて第1〜第3の牽引帯84,86,88を長さの異なるものに交換すれば、幅広い体格の使用者が使用可能となることから、例えば病院のリハビリテーションセンター等において不特定多数の使用者が用いる場合等にも対応可能である。更に、複数の取付金具100が左右に並んで設けられていることから、フック金具98の取付位置を変更することで、補助力伝達帯82の上下方向での長さを変更することができて、体格差に応じた調整を簡易に行うことができる。加えて、第2の牽引帯86にコキ90が設けられていることから、第2の牽引帯86の長さを調節することで補助力伝達帯82の長さを簡易に調節することもできる。
【0091】
以上、本発明の実施形態について詳述してきたが、本発明はその具体的な記載によって限定されない。例えば、前記実施形態では、股関節の運動補助に関節運動補助具を用いるために第1の装着部が膝関節に取り付けられているが、第1の装着部は、股関節を跨いで第2の装着部と反対側に設けられていれば良く、腰部に第2の装着部が装着される場合には、第1の装着部を大腿に取り付けても略同じ効果を得ることができる。尤も、第1の装着部の取付け位置が股関節に近すぎると補助力が有効に作用し難くなることから、第1の装着部を大腿に取り付ける場合には、膝関節に近い位置に取り付けることが望ましい。
【0092】
また、駆動装置の配設位置は、腰部に限定されるものではなく、例えば、肩関節の屈伸運動を補助する場合には使用者の背部に駆動装置を設けることにより、使用者の動作を阻害することなく、補助力の伝達経路を短くして関節運動補助具の小型化が図られ得る。
【0093】
また、使用者の動作を検出するセンサとしては、静電容量型のセンサに限定されるものではなく、例えば、力の作用による抵抗値の変化に基づいて使用者の動作を検出する抵抗変化型のセンサを採用することも可能である。このような抵抗変化型のセンサを採用すれば、直流電圧を用いての計測が可能であることから、計測回路の簡易化が容易であり、小型化やコストの低減を実現し易くなる。しかも、小さな力の作用に対しても抵抗値が鋭敏に変化することから、関節の僅かな運動から大きな運動まで幅広く検出することが可能となる。なお、抵抗変化型センサとしては、例えば、特開2008−69313号公報等に示された柔軟性を有するものが好適に採用される。また、静電容量型センサと抵抗変化型センサを組み合わせて用いる等、構造や検出方法の異なる複数種類のセンサを組み合わせて用いても良い。
【0094】
また、前記実施形態において示されたセンサの配設位置は、あくまでも例示であって、使用者の動作を検出することができれば、配設態様は特に限定されるものではない。具体的には、例えば、図10に示されている関節運動補助具110のように、第1の牽引帯18の裏面(大腿への重ね合わせ面)に静電容量型センサ112が配設されて、股関節を屈曲する際の大腿筋の変形に伴う第1の牽引帯18と大腿の間での挟圧力を静電容量の変化として検出することもできる。更に、例えば、図11に示されている関節運動補助具120のように、使用者の臀部から大腿にかけて広がる静電容量型センサ122を採用すれば、股関節の屈伸をより直接的に検出することができる。この場合、関節運動補助具120は、補助力伝達帯12および第1,第2の装着部14,16に加えて、静電容量型センサ122を備えたパンツ(レギンス)状のセンサ保持スーツ124を含んで構成されており、センサ保持スーツ124を装着してから、補助力伝達帯12および第1,第2の装着部14,16を装着する。なお、図10,図11に示された静電容量型センサ112,122も、基本的な構造は実施形態に示された静電容量型センサ32と同じであることから、ここでは説明を省略する。更に、静電容量型センサ112と静電容量型センサ122を組み合わせて採用しても良く、より高精度な動作の検出が可能となる。
【0095】
また、前記実施形態では、股関節の屈伸を効果的に補助するために、少なくとも前面側に補助力伝達部が設けられていたが、例えば、膝関節の屈伸を補助する場合等では、背面側にのみ補助力伝達部が設けられる場合もある。要するに、補助力伝達部は、関節の可動性等を考慮して適宜に配置されていれば良い。
【0096】
また、補助力伝達部は、必ずしも全体が可撓性(柔軟性)を有するものに限定されず、部分的であれば金属やプラスチック等で形成された硬質な部分があっても良い。更に、補助力伝達部の全体が力の伝達方向で弾性変形可能とされていても良いし、補助力伝達部が力の伝達方向での弾性変形を部分的に許容されていても良い。
【0097】
また、伝達帯支持ベルト26と駆動装置支持ベルト28は、必ずしも独立して設けられておらず、例えば、駆動装置支持ベルト28の前部に補助力伝達帯12の端部が固定されて、駆動装置支持ベルト28が伝達帯支持ベルトとしての機能を同時に備える場合もある。また、補助力伝達帯12は、伝達帯支持ベルト26に対して別体で形成されている必要はなく、伝達帯支持ベルト26の前部から延び出すように補助力伝達帯12の第2の牽引帯20が一体的に設けられていても良い。なお、上記からも明らかなように、駆動装置支持ベルト28が伝達帯支持ベルトとしての機能を有する場合には、補助力伝達帯12が駆動装置支持ベルト28と一体形成され得る。
【0098】
また、前記実施形態では、股関節の屈伸運動を補助する関節運動補助具が示されていたが、本発明に係る関節運動補助具は、膝関節や肩関節、肘関節等、股関節以外の関節の屈伸運動を補助するために用いることもできる。
【符号の説明】
【0099】
10,50,60,80,110,120:関節運動補助具、12,52,82:補助力伝達帯(補助力伝達部)、14,70:第1の装着部、16:第2の装着部、32,112,122:静電容量型センサ、40:駆動源、46:制御装置、62:本体部、64:補助力伝達部
【技術分野】
【0001】
本発明は、使用者の関節の曲げ伸ばしに際して、曲げ伸ばしを実現できるように補助するアシスト力や、曲げ伸ばしに必要な筋力を効率的に強化するための負荷(レジスト力)を使用者に及ぼす関節運動補助具に関するものである。
【背景技術】
【0002】
従来から、筋力を失った身体障害者や筋力が衰えた高齢者の歩行等の動作をサポートするために、特許第4200492号公報(特許文献1)に示されているような装着式の動作補助装置が提案されている。
【0003】
ところで、特許文献1に記載されている装着式動作補助装置は、所謂、外骨格型の補助装置であって、使用者の体の側方に配された硬質の外骨格アームが関節部においてモータで駆動されることにより、外骨格アームを装着された使用者の腕や脚等が外骨格アームと共に動作させられるようになっている。
【0004】
しかしながら、このような硬質の外骨格を用いた補助装置では、使用者の体格(大腿や下腿の長さ等)を正確に計測して、外骨格アームの長さを厳密に調整しなければならず、この調整が不適切な場合、運動時に各関節に過剰な力が加わって、非常に危険な状態になり得る。また、外骨格型補助装置の着脱作業は、動作の補助を必要としている使用者にとって容易ではなく、着脱にかなりの手間と時間が必要になる。それ故、低下した筋力を補って動作を楽にするといった目的で、日常的に装着して使用することは難しかった。しかも、大きな外骨格を有する補助装置を使用する場合、使用者が自らの筋力で外骨格の駆動力に抗して動作することは略不可能であり、筋力の効率的な増強を目的として歩行訓練等にかかる補助装置を用いることは、全く考慮されていない。また、補助装置の動作を制御するために、表面筋電位の測定を行う必要があることから、使用者が多数の表面電極(通常は18個)を装着する必要があるという問題もあった。
【0005】
なお、特開2010−110464号公報(特許文献2)には、比較的に簡易且つ軽量な構造の歩行補助装置が提案されているが、このような特許文献2の構造であっても、大腿部の側面に沿って延びる硬質の外骨格(フレーム)が必要であることから、装着の容易化や軽量化が未だ充分ではない場合があった。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特許第4200492号公報
【特許文献2】特開2010−110464号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明は、上述の事情を背景に為されたものであって、その解決課題は、簡単な構造で軽量とされて使用者が容易に着脱可能であると共に、動作の介助だけでなく筋力の増強訓練を効果的に行うためにも利用可能とされた、新規な構造の関節運動補助具を提供することにある。
【課題を解決するための手段】
【0008】
すなわち、本発明の第1の態様は、関節運動補助具において、柔軟性を有する補助力伝達部の両端部分に対して、使用者の関節を挟んだ一方の部位に装着される第1の装着部と他方の部位に装着される第2の装着部とが設けられている一方、該補助力伝達部を通じて該第1の装着部と該第2の装着部との間に引張力を及ぼす駆動源が設けられていると共に、該補助力伝達部の少なくとも一部が該駆動源による引張力の作用方向で弾性変形可能とされていることを特徴とする。
【0009】
このような第1の態様に記載された関節運動補助具によれば、補助力伝達部が柔軟性を有して変形を許容されていることにより、硬質な外骨格を有する関節運動補助具に比して、使用者が容易に着脱することができる。それ故、加齢や傷病による筋力の低下等によって動作が困難となっている場合に、関節運動補助具から得られる力を補助力として目的とする動作を行ったり、関節運動補助具から得られる力を負荷として目的とする動作に必要な筋力を効率的に増強したりすることが、関節運動補助具の簡単な着脱作業によって実現される。その結果、運動器障害に起因するロコモティブシンドローム(運動器症候群)によって、高齢者等の活動が制限されるのを日常的に防ぐことができると共に、日常生活の中でも高効率の筋力増強トレーニングを行うことができることから、種々の傷病や安静臥床による一時的な筋力の低下等が速やかに解消される。
【0010】
さらに、補助力伝達部が柔軟であることによって、使用者に拘束されている感覚を与え難くなって、装用感の向上が図られる。それ故、関節運動補助具の装用による使用者の肉体的および精神的な負担が低減されて、長時間に亘って連続的に装用することが可能となる。
【0011】
また、補助力伝達部の少なくとも一部が引張力の作用方向で弾性変形可能とされていることにより、駆動源による及ぼされる引張力が第1の装着部と第2の装着部の間で補助力伝達部の弾性によって緩和される。それ故、使用者の関節等に過大な負荷をかけることなく、補助力を緩衝的に作用させることができる。
【0012】
本発明の第2の態様は、第1の態様に記載された関節運動補助具において、使用者の関節の屈伸を検出するセンサが設けられていると共に、該センサの検出結果に基づいて前記駆動源を制御する制御装置が配設されているものである。
【0013】
第2の態様によれば、センサの検出結果に基づいて補助力が自動的に制御されることから、スイッチ操作等の面倒な操作を要することなく、適切な補助を適時に得ることができる。
【0014】
本発明の第3の態様は、第2の態様に記載された関節運動補助具において、前記センサが、使用者の関節の屈伸に伴って該センサに及ぼされる力に基づいて使用者の関節の屈伸を検出可能とされているものである。
【0015】
第3の態様によれば、センサに及ぼされる力に基づいて関節の屈伸を検出することから、高精度な検出が可能とされて、使用者の動作を効率的に補助することが可能となる。
【0016】
本発明の第4の態様は、第3の態様に記載された関節運動補助具において、前記センサが、静電容量型センサおよび抵抗変化型センサの少なくとも1つを含んで構成されているものである。
【0017】
第4の態様において静電容量型センサを採用すれば、センサに及ぼされる力を高精度に検出することができて、動作を適切に補助することができる。更に、静電容量型センサは、力が繰返し入力しても検出精度の低下が小さく、検出結果の再現性が良いことから、耐久性の向上が図られる。更にまた、静電容量型センサは、温度変化に対する検出精度の変化幅が小さく、且つ、温度変化に対して初期値を調節することで検出精度が容易に補正可能であることから、温度変化が大きい場合にも安定した検出が実現される。
【0018】
一方、抵抗変化型センサを採用すれば、センサに及ぼされる力に対して抵抗値が鋭敏に変化することから、時間遅れの少ない制御が可能となって、動作の補助を適時に実行することができる。更に、抵抗変化型センサは、センサに作用する力が小さい場合から大きい場合まで広範囲に亘って検出可能であることから、関節の曲がりが小さい場合と大きい場合の何れに対しても有効な検出結果を得ることができる。
【0019】
本発明の第5の態様は、第1〜第4の何れか1つの態様に記載された関節運動補助具において、前記補助力伝達部が力の伝達方向に延びる帯状とされているものである。
【0020】
第5の態様によれば、補助力伝達部が帯状とされることにより、補助力伝達部の質量が小さくされて、関節運動補助具の軽量化が図られる。その結果、装着のし易さの向上や装着による負荷の低減が実現されて、より取り扱いやすい関節運動補助具を得ることができる。
【0021】
また、補助力伝達部が肉薄とされていることにより、厚さ方向での曲げが許容され易くなることから、補助力伝達部が使用者の体の表面形状に応じて変形することで、異物感が低減されて、装用感が向上する。更に、補助力伝達部が肉薄であれば、関節運動補助具を装着した上から衣服を着用した場合に、補助力伝達部による衣服の凸部が生じ難く、関節運動補助具が目立つのを防いで日常生活で常用し易くなる。
【0022】
本発明の第6の態様は、第1〜第5の何れか1つの態様に記載された関節運動補助具において、前記補助力伝達部が衣服状の本体部に一体的に設けられており、該本体部の着用によって該補助力伝達部が使用者の関節を跨いで配設されるものである。
【0023】
第6の態様によれば、補助力伝達部が衣服状の本体部と一体的に設けられていることにより、補助力伝達部の装着と所定位置への配置が、本体部を衣服と同様に着用することによって簡単に完了する。それ故、筋力の低下した高齢者や傷病者であっても日常的に使用することが容易であると共に、駆動源による引張力が適切に伝達されて目的とする動作補助を有効に得ることができる。
【0024】
本発明の第7の態様は、第1〜第6の何れか1つの態様に記載された関節運動補助具において、前記補助力伝達部における弾性変形可能な部分が、前記駆動源による引張力の作用方向の弾性に比してそれと直交する方向の弾性が小さくされているものである。
【0025】
第7の態様によれば、引張力の作用方向である長さ方向では、駆動源による引張力が充分に緩衝されて伝達されることにより、使用者の関節等への負荷を抑えることができる。また、引張力の作用方向と直交する幅方向では、変形が抑えられることによって、力の選択的な伝達が実現されると共に、形状の安定性や耐久性の向上が図られる。
【0026】
本発明の第8の態様は、第1〜第7の何れか1つの態様に記載された関節運動補助具において、前記補助力伝達部が使用者の股関節と膝関節の少なくとも一方を跨いで配設されているものである。
【0027】
第8の態様によれば、脚部に補助力が及ぼされることによって、股関節と膝関節少なくとも一方の屈伸が補助される。それ故、例えば、関節の屈伸に必要な筋力の不足を補う補助力(アシスト力)や、関節の屈伸に必要な筋力に対して抵抗負荷として作用する補助力(レジスト力)によって、脚部の運動の容易化や脚部の筋力の強化を実現することができる。
【0028】
また、本発明の第9の態様は、第8の態様に記載された関節運動補助具において、前記第1の装着部が使用者の大腿と膝関節の少なくとも一方に取り付けられていると共に、前記第2の装着部が使用者の腰部に取り付けられており、前記補助力伝達部が股関節を跨いで配設されているものである。
【0029】
第9の態様によれば、駆動源による引張力が、股関節の屈伸に必要とされる筋力を補強するためのアシスト力や、股関節周囲筋等の筋力を効率的に増強するためのレジスト力として作用することから、股関節の屈伸運動を伴う歩行動作等が、関節運動補助具によって補助される。
【0030】
本発明の第10の態様は、第9の態様に記載された関節運動補助具において、前記駆動源が前記第2の装着部に取り付けられているものである。
【0031】
第10の態様によれば、駆動源が、股関節の屈伸時に大腿よりも動きの小さい腰部に取り付けられた第2の装着部で支持されることから、駆動源が安定して支持されると共に、比較的に重量が大きくなり易い駆動源が動きの小さい腰部に配設されることで、駆動源に作用する慣性力等が使用者の脚部への負荷になるのも防止される。
【0032】
また、第1の装着部が大腿又は膝関節に取り付けられると共に、駆動源を支持する第2の装着部が腰部に取り付けられて、それら第1の装着部と第2の装着部が何れも股関節に近い位置に配設される。それ故、股関節を跨いで配設される補助力伝達部の長さを短くすることができて、関節運動補助具の軽量化や小型化が有利に図られると共に、関節運動補助具を容易に装着可能とすることができる。
【0033】
本発明の第11の態様は、第1〜第10の何れか1つの態様に記載された関節運動補助具において、前記駆動源による引張力が、関節の屈伸運動に必要な力を補強するアシスト力として作用するものである。
【0034】
第11の態様によれば、関節の屈伸運動に必要とされる筋力が低下している場合に、駆動源による引張力が補助力伝達帯を介して伝達されて、アシスト力として作用することにより、筋力の不足が補われて、目的とする関節の屈伸運動を行うことが可能となる。これによれば、例えば、加齢等による筋力の低下によって運動が困難な場合に、必要に応じて使用者の動作を補助して、容易に運動可能な状態を維持することができる。その結果、筋力の低下によって活動が制限されるのを防ぐことができると共に、更なる筋力の低下を防いで、症状が悪化するのを防止することが可能となる。
【0035】
本発明の第12の態様は、第1〜第11の何れか1つの態様に記載された関節運動補助具において、前記駆動源による引張力が、関節の屈伸運動に必要な力に抗するレジスト力として作用するものである。
【0036】
第12の態様によれば、例えば、関節の屈伸運動に必要とされる筋力が傷病等によって一時的に低下している場合に、駆動源による補助力を敢えて動作に要する力と抗する方向で作用させて負荷(レジスト力)として作用させることにより、低下した筋力の増強によって機能回復を図るリハビリテーションを効率的に実施することができる。また、レジスト力の作用によって効果的に筋力を増強できることから、健常者が用いて、運動量の不足等で筋力が低下するのを防ぐといった目的を効率的に達成することも可能である。
【発明の効果】
【0037】
本発明によれば、関節を挟んで各一方の側に配設される第1の装着部と第2の装着部の間に補助力伝達部を介して引張力を及ぼすことにより、関節の屈伸を補助して、筋力の不足を補う、或いは筋力の効率的な増強を図ることができる。しかも、補助力伝達部が駆動源による引張力の作用方向で弾性変形可能とされており、駆動源による引張力が緩衝されて使用者に及ぼされることから、関節に対する過大な負荷が防止されて、使用者の負担が低減される。更に、補助力伝達部が柔軟性を有していることにより、必要に応じて容易に着脱できると共に、優れた装用感で長時間の使用が可能となる。
【図面の簡単な説明】
【0038】
【図1】本発明の第1の実施形態としての関節運動補助具を示す正面図。
【図2】図1に示された関節運動補助具の背面図。
【図3】図1に示された関節運動補助具を構成する静電容量型センサの斜視図。
【図4】図2に示された関節運動補助具の背面図において、駆動装置の内部構造を示す図。
【図5】本発明の第2の実施形態としての関節運動補助具を示す正面図。
【図6】図5に示された関節運動補助具の背面図。
【図7】本発明の第3の実施形態としての関節運動補助具を示す正面図。
【図8】図7に示された関節運動補助具の背面図。
【図9】本発明の第4の実施形態としての関節運動補助具を示す正面図。
【図10】本発明の別の1実施形態としての関節運動補助具を示す正面図。
【図11】本発明のまた別の1実施形態としての関節運動補助具を示す背面図。
【発明を実施するための形態】
【0039】
以下、本発明の実施形態について、図面を参照しつつ説明する。
【0040】
図1,図2には、本発明の第1の実施形態としての関節運動補助具10が示されている。関節運動補助具10は、股関節の屈伸を補助するものであって、股関節を跨いで延びる左右一対の補助力伝達部としての補助力伝達帯12,12の両端部分に、股関節を挟んだ一方の側に取り付けられる第1の装着部14と、股関節を挟んだ他方の側に取り付けられる第2の装着部16とが、それぞれ設けられた構造を、有している。なお、図1,図2では、関節運動補助具10が使用者の装着状態で図示されており、使用者の輪郭線が2点鎖線で示されている。また、以下の説明において、原則として、前面とは使用者の腹部側の面(正面)を、後面とは使用者の背部側の面(背面)を、上下とは鉛直上下方向である図1中の上下を、それぞれ言う。また、以下の説明において、「アシスト力」とは、動作に必要とされる力を補う方向で作用する補助力のことを、「レジスト力」とは、動作に必要とされる力に抗する方向で作用する補助力のことを言う。
【0041】
より詳細には、補助力伝達帯12は、それぞれ布地で形成された第1の牽引帯18と第2の牽引帯20を、金属製の連結金具22で連結した構造とされており、第1の牽引帯18および第2の牽引帯20による構成部分が柔軟に変形可能とされている。
【0042】
第1の牽引帯18は、一方の端部側(図1中、上側)に向かって次第に狭幅となる肉薄帯状の布地で形成されており、関節運動補助具10の装着状態において使用者の大腿の前面を覆うように配設される。また、第1の牽引帯18は、後述する電動モータ40による引張力の作用方向となる長さ方向(図1中、上下方向)で弾性変形可能とされていると共に、幅方向(図1中、左右方向)で弾性が小さくされて変形が制限されており、長さ方向と幅方向で入力に対する変形量の異方性を有している。なお、第1の牽引帯18は、長さ方向において、0.3kgf/cm以上且つ0.5kgf/cm以下の弾性を有していることが望ましい。
【0043】
また、第1の牽引帯18の上端にはリング状の連結金具22が取り付けられており、第1の牽引帯18が連結金具22を介して第2の牽引帯20に連結されている。第2の牽引帯20は、略一定の幅寸法を有する帯状であって、伸縮性の小さい繊維を用いた布地で形成されている。第2の牽引帯20は、中間部分が連結金具22に挿通されて第1の牽引帯18と連結されており、もって、補助力伝達帯12が構成されている。なお、第2の牽引帯20は、必ずしも伸縮性を抑えられたものでなくても良く、第1の牽引帯18と同様の弾性繊維等で形成された伸縮性を有するものも採用され得る。
【0044】
また、補助力伝達帯12の第1の牽引帯18の下方には、第1の装着部14が設けられている。第1の装着部14は、膝関節を保護するために用いられるスポーツ用サポータ状であって、伸縮性を有する布地等で形成されており、使用者の膝関節に巻き付けられて装着される。また、第1の装着部14は、第1の牽引帯18と一体形成されており、第1の装着部14の前面部分から第1の牽引帯18が上方に向かって延び出している。なお、第1の装着部14には、部分的な貫通孔24が設けられており、貫通孔24が使用者の膝頭に位置決めされることによって、膝関節の屈伸を妨げないようになっている。
【0045】
また、補助力伝達帯12の第2の牽引帯20の両端部は、第2の装着部16に取り付けられている。第2の装着部16は、それぞれ腰部に装着される伝達帯支持ベルト26と駆動装置支持ベルト28を有しており、第2の牽引帯20の一方の端部が伝達帯支持ベルト26に取り付けられていると共に、他方の端部が駆動装置支持ベルト28に取り付けられている。
【0046】
伝達帯支持ベルト26は、伸縮性の小さい帯状の布地で形成されており、使用者の腰部に巻き付けられて、両端部が面ファスナやスナップ,フック等で連結されることにより、使用者の腰部に装着される。また、伝達帯支持ベルト26には、リング状を呈する一対のガイド金具30,30が設けられており、伝達帯支持ベルト26の腰部への装着状態において、腰部の左右両側に配置される。そして、第2の牽引帯20の一方の端部が、伝達帯支持ベルト26の前面部分に対して、縫合や溶着、スナップやフック、面ファスナ等の手段を用いて取り付けられている。
【0047】
さらに、伝達帯支持ベルト26には、センサとしての一対の静電容量型センサ32が取り付けられている。静電容量型センサ32は、例えば特開2010−43880号公報や特開2009−20006号公報等に示されているように、弾性変形を許容された柔軟な静電容量変化型のセンサであって、図3に示されているように、誘電性の弾性材で形成された誘電体層34の両面に、導電性の弾性材で形成された一対の電極膜36a,36bを設けた構造を有している。また、静電容量型センサ32は、一方の電極膜36aが伝達帯支持ベルト26の背部の内面に固着されることにより、伝達帯支持ベルト26に取り付けられている。
【0048】
そして、伝達帯支持ベルト26の装着状態において、静電容量型センサ32は、他方の電極膜36bが使用者の臀部に重ね合わされて、臀部と伝達帯支持ベルト26の間に挟み込まれる。これにより、静電容量型センサ32は、股関節の屈伸による作用圧力の変化を一対の電極膜36a,36bの接近/離隔に伴う静電容量の変化として検出して、検出結果を後述する駆動装置38の制御装置46に出力する。なお、静電容量型センサ32は、図2に破線で示されているように、左右一対が配設されており、左右の臀部に各1つの静電容量型センサ32が重ね合わされている。また、図3では、誘電体層34および一対の電極膜36a,36bの厚さ寸法が、長さ寸法および幅寸法に比して、大きく示されているが、好適には、それら誘電体層34および一対の電極膜36a,36bは、何れも薄膜状とされて、臀部に違和感を与えることなく配設可能とされる。
【0049】
一方、駆動装置支持ベルト28は、図1,図2に示されているように、伝達帯支持ベルト26と同様に、伸縮性の小さい帯状の布地で形成されており、使用者の腰部に巻き付けられて、両端部が面ファスナやスナップ、フック等で連結されることにより、使用者の腰部に装着される。また、駆動装置支持ベルト28は、背面部分が正面部分よりも下方まで延び出して大きな面積を有しており、その背面部分に駆動装置38が固定されている。
【0050】
駆動装置38は、図4に示されているように、駆動源としての電動モータ40と、電動モータ40によって回転駆動される回転軸42と、電動モータ40に電力を供給するバッテリー等の電源装置44と、静電容量型センサ32の検出結果に基づいて電動モータ40を制御する制御装置46とを有している。
【0051】
電動モータ40は、一般的な電動機であって、電源装置44からの通電によって駆動軸48の回転駆動力を発生するようになっている。また、電動モータ40の駆動軸48に及ぼされた回転駆動力は、図示しない減速歯車列を介して、回転軸42に伝達される。回転軸42は、周方向への回転を許容されるように支持された円形軸状の部材であって、その外周面に第2の牽引帯20の他方の端部が固定されている。これにより、第2の牽引帯20の他方の端部は、駆動装置38を介して駆動装置支持ベルト28に取り付けられており、もって、補助力伝達帯12が股関節を跨いで配設されている。
【0052】
そして、回転軸42が電動モータ40の駆動軸48から及ぼされた駆動力によって周方向一方に回転させられることにより、補助力伝達帯12の第2の牽引帯20が回転軸42に巻き取られる。これにより、電動モータ40による駆動力が補助力伝達帯12の長さ方向(第1の牽引帯18および第2の牽引帯20の長さ方向)に伝達されて、第1の装着部14と第2の装着部16の間に引張力として及ぼされる。上記から明らかなように、補助力伝達帯12は、電動モータ40の駆動力の伝達方向に延びている。一方、回転軸42が電動モータ40によって周方向他方に回転させられると、回転軸42による補助力伝達帯12の巻き取りが解除されて、第1の装着部14と第2の装着部16の間で引張力が解除される。
【0053】
また、電動モータ40の制御は、制御装置46が、電源装置44から電動モータ40への通電の有無や通電方向(駆動軸48の回転方向)が制御装置46によって制御されることで実行されている。制御装置46は、CPUやRAM,ROM等を備えており、静電容量型センサ32の検出結果(出力信号)に基づいて使用者の股関節の屈曲運動および伸展運動を検出して、検出した股関節の運動に応じて電動モータ40への通電を制御する。これにより、電動モータ40の駆動力に基づいて第1の装着部14と第2の装着部16の間に及ぼされる引張力が、制御装置46によって調節されている。なお、本実施形態では、制御装置46が、歩行動作の段階(例えば、股関節を屈曲して後足を前方に運ぶ段階や股関節を伸展して前足で地面を蹴る段階等)を特定して、特定した歩行動作の段階に応じて電動モータ40への通電を制御するようになっている。
【0054】
かくの如き構造とされた関節運動補助具10を装用すれば、股関節を屈曲する際に、股関節の屈曲運動に必要な力を補強するように補助力(アシスト力)が及ぼされて、股関節の屈伸を伴う動作が補助される。即ち、制御装置46は、静電容量型センサ32の検出結果に基づいて使用者が股関節を屈曲しようとしていることを特定すると、電源装置44から電動モータ40に通電して回転軸42を周方向一方に回転させる。これにより、第2の牽引帯20が回転軸42によって巻き取られて、第2の牽引帯20の実質的な長さが短くなることから、第2の牽引帯20の中間部分に外挿された連結金具22が第2の装着部16側(上側)に引き寄せられて変位させられる。そして、連結金具22に取り付けられた第1の牽引帯18を通じて第1の装着部14に引張力が及ぼされて、膝関節に装着された第1の装着部14が腰部に装着された第2の装着部16側に引き寄せられる。その結果、膝関節を重力に抗して腰部側に引き付けるようにアシスト力が作用して、股関節の屈曲運動が補助される。なお、静電容量型センサ32の検出値に基づいて、制御装置46が回転軸42の回転量(電動モータ40への通電時間)を調節すれば、使用者が行おうとする動作に対して過不足のないアシスト力が提供される。
【0055】
一方、制御装置46は、静電容量型センサ32の検出結果に基づいて使用者が股関節を伸展させようとしていることを特定すると、電源装置44から電動モータ40に通電して回転軸42を周方向他方に回転させる。これにより、回転軸42による第2の牽引帯20の巻取りが解除されて、第2の牽引帯20の実質的な長さが長くなることから、第2の牽引帯20の中間部分に外挿された連結金具22が自重等によって第2の装着部16から離隔する方向(下側)に変位する。そして、連結金具22に取り付けられた第1の牽引帯18を通じて第1の装着部14に及ぼされていた引張力が解除されて、重力の作用等に基づいて第1の装着部14が第2の装着部16から離隔する。その結果、股関節の伸展運動が関節運動補助具10によって妨げられるのが防止される。
【0056】
このように、関節運動補助具10を装用すれば、股関節を屈曲する際に必要とされる力の一部が電動モータ40の発生力によって補われることから、例えば、歩行時に股関節を屈曲して後足を前方に運ぶ動作をする際に、小さな筋力で目的とする動作を行うことが可能とされる。従って、関節運動補助具10を用いれば、加齢や傷病によって使用者が動作を行うための充分な筋力を備えていない場合にも、目的とする動作をスムーズに行うことができて、使用者の活動が制限されるのを防ぐことが可能となる。
【0057】
また、電動モータ40の発生駆動力をアシスト力として使用者の脚部に伝達する経路上に設けられた補助力伝達帯12の第1の牽引帯18は、力の伝達方向で弾性変形可能とされている。これにより、電動モータ40の発生駆動力は、第1の牽引帯18の弾性変形によって緩和されてから、使用者の脚部に及ぼされる。それ故、電動モータ40の発生駆動力がダイレクトに伝達される場合に比して、使用者の関節等への負荷が軽減されて、筋を痛める等といった問題が生じるのを防ぐことができる。特に本実施形態では、使用者の脚部に及ぼされるアシスト力が2kgf〜5kgf程度の比較的に小さな力とされており、強制的に動作をさせるのではなく、あくまでも動作に必要な筋力の不足を補うという思想に基づいていることから、使用者の身体に負担をかけることなく、必要な補助を行うことができる。
【0058】
しかも、本実施形態では、第1の牽引帯18の力の伝達方向での弾性が、0.3kgf/cm〜0.5kgf/cmの間に設定されている。これにより、電動モータ40の発生駆動力が充分に緩衝されて、使用者の脚部に過大な負荷が作用するのを回避できると共に、使用者の動作を充分に実現し得るだけの有効なアシスト力が使用者の脚部に伝達されて、動作を効果的に補助することができる。
【0059】
さらに、第1の牽引帯18は、力の伝達方向と略直交する方向での変形が制限されており、第1の牽引帯18と一体形成された第1の装着部14の周方向での伸縮(拡径変形乃至は縮径変形)が抑えられて、形状の安定性が高められている。これにより、電動モータ40による引張力の作用時に、第1の装着部14が膝関節から外れることなく保持されて、アシスト力が脚部に対して有効に伝達される。
【0060】
また、関節運動補助具10によるアシスト力は、股関節の屈曲運動に際して発揮される一方で、股関節の伸展運動に際して解除される。これにより、関節運動補助具10を装用すれば、起立状態において重力に抗した運動が必要とされる股関節の屈曲運動が補助される一方、起立状態において重力の作用で補助される股関節の伸展運動では、アシスト力が抗力として作用してしまうことがなく、スムーズな動作が実現される。従って、股関節の屈曲と伸展を繰り返し行う歩行動作等においても、動作の妨げとなることなく、必要なアシスト力を適時に提供して動作を適切に補助することができる。
【0061】
本実施形態の関節運動補助具10において、このような使用者の動作状態に応じた補助の切り替えは、静電容量型センサ32の検出結果に基づいて制御装置46が自動的に実行するようになっている。それ故、使用者は、アシスト力を付与するタイミングや付与するアシスト力の大きさ等を手動で制御する必要がなく、適切な補助を適時に得ることができる。
【0062】
しかも、センサとして静電容量型センサ32が採用されていることにより、高精度な検出結果を得ることができる。それ故、例えば、検出結果に基づいてアシスト力の大きさ等を調節すれば、より適切な補助が可能となる。更に、静電容量型センサ32では、温度変化に対する検出精度の低下が小さいと共に、温度変化に対する補正が容易であることから、温度変化が大きい場合にも正しい検出結果を安定して得ることができる。加えて、静電容量型センサ32では、繰返しの入力に対する検出精度の低下が小さいことから、充分な耐久性を確保することができて、日常生活での常用等が実現される。
【0063】
また、本実施形態における補助力伝達部が、帯形状を有する肉薄の布で形成された補助力伝達帯12とされていることにより、充分な柔軟性が付与されており、硬質の外骨格を有する関節運動補助具に比して、容易に着脱することができる。即ち、硬質の外骨格を使用者に装着する場合、使用者は外骨格の形状に合わせて関節の曲げ角度を調節する必要があるし、着座して装着することは難しい場合も多い。しかし、本実施形態の関節運動補助具10は、第1の装着部14と第2の装着部16を連結する補助力伝達帯12が柔軟で必要に応じて撓むことから、補助力伝達帯12を充分に長くしておけば、使用者の関節の曲げ角度がどの程度であったとしても、第1の装着部14と第2の装着部16をそれぞれ適切な位置に取り付けることが可能である。しかも、補助力伝達帯12が柔軟であることによって、例えば、股関節を屈曲した着座姿勢で第1の装着部14と第2の装着部16をそれぞれ装着することが可能とされており、楽な姿勢で着脱作業を行うことができる。
【0064】
さらに、肉薄帯形状の布で形成された補助力伝達帯12を採用することにより、関節運動補助具10が軽量とされて、筋力の低下した高齢者等でも容易に取り扱うことができる。しかも、本実施形態では、第1の装着部14および第2の装着部16もそれぞれ布製とされていることから、関節運動補助具10全体がより軽量化とされており、着脱作業等を含む取回し性の更なる向上が図られている。
【0065】
更にまた、補助力伝達帯12が肉薄の布製とされていることにより、装着状態において補助力伝達帯12が使用者の体表面の形状に沿って厚さ方向で容易に湾曲する。それ故、関節運動補助具10によれば、良好な装用感が実現されると共に、関節運動補助具10の上に衣服を重ねて着用した場合に補助力伝達帯12が凹凸を生じて目立つのを防いで、日常生活において気軽に使用することができる。本実施形態では、第1の装着部14および第2の装着部16もそれぞれ肉薄とされており、関節運動補助具10の上に衣服を重ねて着用する際に、視覚的な違和感が生じるのを抑えることで日常においてより使用し易くなっている。
【0066】
また、第1の装着部14が膝関節に取り付けられると共に、第2の装着部16が腰部に取り付けられることにより、補助力伝達帯12の長さが必要以上に長くなるのを防いで関節運動補助具10の小型化を図りつつ、アシスト力が脚部に対して効率的に及ぼされる。蓋し、大腿の揺動時に支点となる股関節から作用点となる第1の装着部14までの離隔距離が大きくされると、引張力が第1の装着部14に対して効率的に作用するからである。しかも、駆動装置38が歩行時に運動量の少ない腰部に設けられていることにより、駆動装置38が歩行動作の妨げになるのを防止できる。
【0067】
図5,図6には、本発明の第2の実施形態としての関節運動補助具50が示されている。関節運動補助具50は、補助力伝達部としての補助力伝達帯12および補助力伝達帯52と、その両端に設けられた第1の装着部14および第2の装着部16を含んで構成されている。なお、以下の説明において、第1の実施形態と実質的に同一の部材および部位については、同一の符号を付すことにより、説明を省略する。
【0068】
より詳細には、補助力伝達帯52は、第3の牽引帯54と第4の牽引帯56を含んで構成されており、使用者の背面側において股関節を跨いで配設されて、第1の装着部14と第2の装着部16を連結している。
【0069】
第3の牽引帯54は、第1の装着部14の背面側の上端から上方に向かって延び出しており、下端が第1の装着部14に固定されていると共に、上端が連結金具22に固定されている。なお、第3の牽引帯54は、第1の装着部14とは別体で形成されて縫合等の手段で連結されており、第3の牽引帯54の要求性能と第1の装着部14の要求性能が何れも高度に実現されるようになっている。また、第3の牽引帯54は、上方に向かって次第に狭幅となっており、股関節の屈伸に際して大腿筋の変形等を許容する形状とされている。
【0070】
また、第3の牽引帯54に取り付けられた連結金具22には、第4の牽引帯56が挿通されている。第4の牽引帯56は、第2の牽引帯20と同様に、略一定の幅寸法を有する肉薄の帯状とされており、伸縮し難い繊維で形成されて弾性変形を制限されている。この第4の牽引帯56は、その中間部分が連結金具22に挿通されている一方、一方の端部が伝達帯支持ベルト26に対して縫合等の手段で固定されていると共に、他方の端部が駆動装置38の回転軸42に固定されている。これにより、第4の牽引帯56の中間部分に第3の牽引帯54が連結されていると共に、第1の装着部14と第2の装着部16が第3,第4の牽引帯54,56によって相互に連結されている。
【0071】
そして、回転軸42が電動モータ40の駆動力によって周方向一方の側に回転させられて、第4の牽引帯56が回転軸42で巻き取られることにより、第3,第4の牽引帯54,56を通じて第1の装着部14と第2の装着部16の間に引張力が及ぼされる。一方、回転軸42が周方向他方の側に回転させられて、第4の牽引帯56の回転軸42による巻取りが解除されることにより、上記引張力が解除される。なお、第4の牽引帯56に引張力を及ぼすための電動モータ40が、第2の牽引帯20に引張力を及ぼすための電動モータ40とは別に設けられていても良いし、共通の電動モータ40による引張力が第2の牽引帯20と第4の牽引帯56の何れか一方に対して選択的に及ぼされるようになっていても良い。
【0072】
そして、使用者が股関節を屈曲する際に、第1の装着部14を第2の装着部16側に引き寄せる方向の引張力を第3,第4の牽引帯54,56を通じて及ぼすことにより、股関節の屈曲運動に必要な力に対して抗する方向で作用する補助力(レジスト力)が脚部に及ぼされる。これにより、電動モータ40の駆動力が股関節を屈曲する運動に対する負荷(抵抗)として作用することから、歩行動作等といった股関節の運動を伴う動作に必要な筋力が、効率的に増強される。更に、股関節を伸展する際には、第3,第4の牽引帯54,56を通じて第1の装着部14と第2の装着部16の間に及ぼされる引張力が解除されて、引張力がアシスト力として作用するのが防止される。これにより、股関節周囲筋等の筋力の増強が効率的に実現される。なお、第1,第2の牽引帯18,20を通じて第1の装着部14に及ぼされる引張力を、股関節を屈曲する際に解除すると共に、股関節を伸展する際に作用させるように制御すれば、股関節を伸ばす運動に対しても負荷を加えることができて、筋力の増強をより効果的に実現することができる。
【0073】
一方、引張力の作用と解除の制御を逆にすれば、動作を介助するための補助力(アシスト力)を効果的に得ることも可能である。即ち、第1の実施形態で示された第1,第2の牽引帯18,20によるアシスト力の付与に加えて、第3,第4の牽引帯54,56を通じて第1の装着部14に及ぼされる引張力を、股関節の屈曲運動の際に解除すると共に、股関節の伸展運動の際に作用させることにより、股関節を曲げる運動に対して第1,第2の牽引帯18,20を通じてアシスト力が及ぼされると共に、股関節を伸ばす運動に対して第3,第4の牽引帯54,56を通じてアシスト力が及ぼされる。
【0074】
要するに、本実施形態の関節運動補助具50によれば、使用者の要求に応じて、歩行等の動作の介助するための補助具としての機能と、リハビリテーション等において股関節周囲筋の筋力増強を効率的に図るための補助具としての機能との何れかを、選択して利用することができる。しかも、関節運動補助具50では、股関節を曲げる運動だけでなく伸ばす運動に対しても補助力が及ぼされることから、使用者の動作がより効果的に補助される。
【0075】
また、関節運動補助具50では、第3,第4の牽引帯54,56が設けられて、股関節の伸展運動に対しても補助力が発揮されることから、関節運動補助具50を着座状態で装着した場合には、装着後に着座姿勢のままで関節運動補助具50による動作補助を開始させて、立ち上がり動作を補助させることも可能である。
【0076】
また、図7,図8には、本発明の第3の実施形態としての関節運動補助具60が示されている。この関節運動補助具60は、腰部から膝下までを覆って体表面に密着するパンツ(レギンス)状を呈する本体部62を有している。この本体部62は、使用者の体型に応じて弾性変形を許容される伸縮性に優れた布地で形成されており、使用者の体型等に応じて変形する。
【0077】
また、本体部62には、補助力伝達部64が設けられている。補助力伝達部64は、肉薄帯状の布地であって、大腿の前面を覆うように上下に延びる第1の牽引部66と、第1の牽引部66の上端から所定の角度で左右に分岐して斜め上方に延び出す第2の牽引部68とを、一体的に備えている。また、補助力伝達部64は、第1の牽引部66と第2の牽引部68の何れも、長さ方向で弾性変形を許容されていると共に、幅方向で弾性変形を制限されている。この補助力伝達部64は、本体部62と一体形成されており、機織時に一体的に設けられる。
【0078】
また、補助力伝達部64の第1の牽引部66の下方には、第1の装着部70が設けられている。第1の装着部70は、略環状とされており、膝関節を全周に亘って略覆うように装着される。また、第1の装着部70は、第1の牽引部66と同じ布地を用いて、本体部62および第1の牽引部66と一体的に設けられており、周方向での弾性変形が制限されて膝関節からのずれが抑えられている。また、第1の装着部70は、膝関節の前面を覆う部分が本体部62に織り込まれて一体化していると共に、膝関節の側面から後面を覆う部分が、左右の側面部分において本体部62から分離してそれぞれ帯状に延び出している。そして、本体部62から分離した第1の装着部70の左右一対の帯状部分には、図示しない面ファスナが設けられており、それら帯状部分を必要に応じて周方向に引っ張って膝関節を締め付けてから、面ファスナで相互に連結することにより、第1の装着部70が膝関節に対し位置決めされるようになっている。なお、第1の装着部70の正面中央部分には、本体部62と同様の伸縮性に優れた素材で形成された部分が設けられており、その部分が膝頭を覆うように配置されることで、膝関節の拘束が防止されている。
【0079】
また、補助力伝達部64の第2の牽引部68は、左右に分岐して内側に延びる端部が、駆動装置支持ベルト28によって締め付けられて保持されている一方、左右に分岐して外側に延びる側が、腰部の側方で本体部62から分離して、端部が帯状をなしており、駆動装置38の回転軸42に固定されている。なお、図中には示されていないが、本実施形態の駆動装置38は、駆動軸48の回転方向を制御装置46によって制御される1つの電動モータ40を備えており、左右の補助力伝達部64,64の各一方に連結される回転軸42,42が、1つの電動モータ40によって回転させられる。また、本実施形態では、左側の補助力伝達部64が駆動装置38に対して背面側から挿入されて回転軸42に固定されていると共に、右側の補助力伝達部64が駆動装置38に対して駆動装置支持ベルト28との間から挿入されて回転軸42に固定されている。以上により、補助力伝達部64は、下端部が第1の装着部14に取り付けられると共に、上端部が第2の装着部としての駆動装置支持ベルト28に取り付けられており、股関節を跨いで配設されている。
【0080】
このような構造とされた関節運動補助具60によれば、第1の実施形態に示された関節運動補助具10と同様に、補助力伝達部64を通じて第1の装着部70と第2の装着部16の間に引張力を及ぼして、歩行動作を含む股関節の運動を補助することができる。
【0081】
しかも、関節運動補助具60は、パンツ状の本体部62に補助力伝達部64が織り込まれて一体的に設けられていることから、パンツと同様の簡単な作業で容易に着脱することができる。更に、本体部62を正しく着用するだけで、補助力伝達部64が正確な位置に配置されて、補助力を効率よく得ることが可能となる。加えて、衣服の下に装着しても、凹凸を生じたり嵩張るといった不具合が生じ難く、他者に視覚的な違和感を与え難いと共に、使用者の動作が拘束されたり、衣服の選択自由度が小さくなるといった問題を回避することができる。
【0082】
なお、本発明の関節運動補助具を上半身の関節の動作を補助するために用いる場合には、シャツ状の本体部に本実施形態と同様に補助力伝達部を一体的に設ければ良い。要するに、動作を補助すべき関節に応じて、その関節を覆うように着用される衣服状の本体部を準備すれば良い。
【0083】
図9には、本発明の第4の実施形態としての関節運動補助具80が示されている。関節運動補助具80は、第1の装着部14と第2の装着部16を補助力伝達部としての補助力伝達帯82で連結した構造を有している。
【0084】
補助力伝達帯82は、第1の牽引帯84と第2の牽引帯86と第3の牽引帯88を含んで構成されている。第1〜第3の牽引帯84,86,88は、それぞれ略一定の幅寸法で延びる肉薄帯状の布地で形成されており、第1,第2の牽引帯84,86が長さ方向で弾性変形可能とされていると共に、第3の牽引帯88が長さ方向での弾性変形を制限されている。また、第2の牽引帯86にはコキ90が設けられており、体格に応じて第2の牽引帯86の長さを簡単に調節することが可能とされている。
【0085】
そして、第1の牽引帯84の上端と第2の牽引帯86の下端がそれぞれ環状の第1の連結金具92に取り付けられており、それら第1の牽引帯84と第2の牽引帯86が第1の連結金具92を介して連結されている。更に、第2の牽引帯86の上端が環状の第2の連結金具94に取り付けられていると共に、第3の牽引帯88が第2の連結金具94に挿通されており、第2の牽引帯86の上端と第3の牽引帯88の中間部分が第2の連結金具94を介して連結されている。なお、第1,第2の牽引帯84,86は、第1,第2の連結金具92,94に対して、取外し不能に固定されても良いが、フックやスナップ、面ファスナ等を用いて取外し可能に取り付けられることが望ましい。本実施形態では、スナップ96を用いて取外し可能な態様で取り付けられている。
【0086】
また、第1の牽引帯84の下端は、第1の装着部14の正面部分の上端に取り付けられている。なお、第1の牽引帯18の第1の装着部14への取付けは、縫合や接着によって固定されていても良いが、フックやスナップ、面ファスナ等によって着脱可能に取り付けられていることが望ましい。
【0087】
さらに、第3の牽引帯88は、一方の端部が、腰部の側方から後方に回り込んで延びて、駆動装置38の回転軸42に固定されていると共に、他方の端部が、腰部の前方で第2の装着部16の駆動装置支持ベルト28に取り付けられている。より詳細には、第3の牽引帯88の他方の端部には、フック金具98が取り付けられており、駆動装置支持ベルト28の前面部分に設けられた環状乃至は半環状の取付金具100に着脱可能な状態で取り付けられる。なお、駆動装置支持ベルト28には、複数の取付金具100が周方向で並んで設けられており、フック金具98を取り付ける取付金具100をそれら複数の中から適当に選択することで、第3の牽引帯88の長さを調節することができる。
【0088】
以上により、関節運動補助具80では、第1の装着部14と第2の装着部16が第1〜第3の牽引帯84,86,88を含んで構成された補助力伝達帯82によって連結されており、補助力伝達帯82を通じて第1の装着部14と第2の装着部16の間に引張力が及ぼされる。そして、第1の実施形態と同様に、股関節の屈伸運動に際して引張力を利用したアシスト力が及ぼされて、歩行動作が補助されるようになっている。
【0089】
また、本実施形態では、補助力伝達帯82が第1〜第3の牽引帯84,86,88で構成されており、それぞれが連結金具92,94によって連結されている。それ故、第1〜第3の牽引帯84,86,88の何れかが損傷した場合等には、損傷部分だけを連結金具92,94から取り外して交換することが可能とされており、メンテナンス性に優れている。
【0090】
また、使用者の体格(大腿の長さ等)に応じて第1〜第3の牽引帯84,86,88を長さの異なるものに交換すれば、幅広い体格の使用者が使用可能となることから、例えば病院のリハビリテーションセンター等において不特定多数の使用者が用いる場合等にも対応可能である。更に、複数の取付金具100が左右に並んで設けられていることから、フック金具98の取付位置を変更することで、補助力伝達帯82の上下方向での長さを変更することができて、体格差に応じた調整を簡易に行うことができる。加えて、第2の牽引帯86にコキ90が設けられていることから、第2の牽引帯86の長さを調節することで補助力伝達帯82の長さを簡易に調節することもできる。
【0091】
以上、本発明の実施形態について詳述してきたが、本発明はその具体的な記載によって限定されない。例えば、前記実施形態では、股関節の運動補助に関節運動補助具を用いるために第1の装着部が膝関節に取り付けられているが、第1の装着部は、股関節を跨いで第2の装着部と反対側に設けられていれば良く、腰部に第2の装着部が装着される場合には、第1の装着部を大腿に取り付けても略同じ効果を得ることができる。尤も、第1の装着部の取付け位置が股関節に近すぎると補助力が有効に作用し難くなることから、第1の装着部を大腿に取り付ける場合には、膝関節に近い位置に取り付けることが望ましい。
【0092】
また、駆動装置の配設位置は、腰部に限定されるものではなく、例えば、肩関節の屈伸運動を補助する場合には使用者の背部に駆動装置を設けることにより、使用者の動作を阻害することなく、補助力の伝達経路を短くして関節運動補助具の小型化が図られ得る。
【0093】
また、使用者の動作を検出するセンサとしては、静電容量型のセンサに限定されるものではなく、例えば、力の作用による抵抗値の変化に基づいて使用者の動作を検出する抵抗変化型のセンサを採用することも可能である。このような抵抗変化型のセンサを採用すれば、直流電圧を用いての計測が可能であることから、計測回路の簡易化が容易であり、小型化やコストの低減を実現し易くなる。しかも、小さな力の作用に対しても抵抗値が鋭敏に変化することから、関節の僅かな運動から大きな運動まで幅広く検出することが可能となる。なお、抵抗変化型センサとしては、例えば、特開2008−69313号公報等に示された柔軟性を有するものが好適に採用される。また、静電容量型センサと抵抗変化型センサを組み合わせて用いる等、構造や検出方法の異なる複数種類のセンサを組み合わせて用いても良い。
【0094】
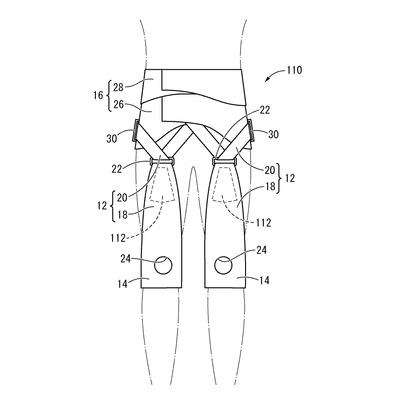
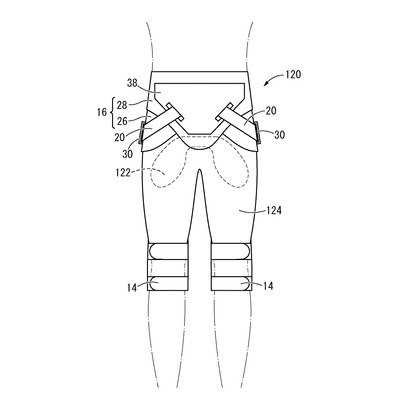
また、前記実施形態において示されたセンサの配設位置は、あくまでも例示であって、使用者の動作を検出することができれば、配設態様は特に限定されるものではない。具体的には、例えば、図10に示されている関節運動補助具110のように、第1の牽引帯18の裏面(大腿への重ね合わせ面)に静電容量型センサ112が配設されて、股関節を屈曲する際の大腿筋の変形に伴う第1の牽引帯18と大腿の間での挟圧力を静電容量の変化として検出することもできる。更に、例えば、図11に示されている関節運動補助具120のように、使用者の臀部から大腿にかけて広がる静電容量型センサ122を採用すれば、股関節の屈伸をより直接的に検出することができる。この場合、関節運動補助具120は、補助力伝達帯12および第1,第2の装着部14,16に加えて、静電容量型センサ122を備えたパンツ(レギンス)状のセンサ保持スーツ124を含んで構成されており、センサ保持スーツ124を装着してから、補助力伝達帯12および第1,第2の装着部14,16を装着する。なお、図10,図11に示された静電容量型センサ112,122も、基本的な構造は実施形態に示された静電容量型センサ32と同じであることから、ここでは説明を省略する。更に、静電容量型センサ112と静電容量型センサ122を組み合わせて採用しても良く、より高精度な動作の検出が可能となる。
【0095】
また、前記実施形態では、股関節の屈伸を効果的に補助するために、少なくとも前面側に補助力伝達部が設けられていたが、例えば、膝関節の屈伸を補助する場合等では、背面側にのみ補助力伝達部が設けられる場合もある。要するに、補助力伝達部は、関節の可動性等を考慮して適宜に配置されていれば良い。
【0096】
また、補助力伝達部は、必ずしも全体が可撓性(柔軟性)を有するものに限定されず、部分的であれば金属やプラスチック等で形成された硬質な部分があっても良い。更に、補助力伝達部の全体が力の伝達方向で弾性変形可能とされていても良いし、補助力伝達部が力の伝達方向での弾性変形を部分的に許容されていても良い。
【0097】
また、伝達帯支持ベルト26と駆動装置支持ベルト28は、必ずしも独立して設けられておらず、例えば、駆動装置支持ベルト28の前部に補助力伝達帯12の端部が固定されて、駆動装置支持ベルト28が伝達帯支持ベルトとしての機能を同時に備える場合もある。また、補助力伝達帯12は、伝達帯支持ベルト26に対して別体で形成されている必要はなく、伝達帯支持ベルト26の前部から延び出すように補助力伝達帯12の第2の牽引帯20が一体的に設けられていても良い。なお、上記からも明らかなように、駆動装置支持ベルト28が伝達帯支持ベルトとしての機能を有する場合には、補助力伝達帯12が駆動装置支持ベルト28と一体形成され得る。
【0098】
また、前記実施形態では、股関節の屈伸運動を補助する関節運動補助具が示されていたが、本発明に係る関節運動補助具は、膝関節や肩関節、肘関節等、股関節以外の関節の屈伸運動を補助するために用いることもできる。
【符号の説明】
【0099】
10,50,60,80,110,120:関節運動補助具、12,52,82:補助力伝達帯(補助力伝達部)、14,70:第1の装着部、16:第2の装着部、32,112,122:静電容量型センサ、40:駆動源、46:制御装置、62:本体部、64:補助力伝達部
【特許請求の範囲】
【請求項1】
柔軟性を有する補助力伝達部の両端部分に対して、使用者の関節を挟んだ一方の部位に装着される第1の装着部と他方の部位に装着される第2の装着部とが設けられている一方、該補助力伝達部を通じて該第1の装着部と該第2の装着部との間に引張力を及ぼす駆動源が設けられていると共に、該補助力伝達部の少なくとも一部が該駆動源による引張力の作用方向で弾性変形可能とされていることを特徴とする関節運動補助具。
【請求項2】
使用者の関節の屈伸を検出するセンサが設けられていると共に、該センサの検出結果に基づいて前記駆動源を制御する制御装置が配設されている請求項1に記載の関節運動補助具。
【請求項3】
前記センサが、使用者の関節の屈伸に伴って該センサに及ぼされる力に基づいて使用者の関節の屈伸を検出可能とされている請求項2に記載の関節運動補助具。
【請求項4】
前記センサが、静電容量型センサおよび抵抗変化型センサの少なくとも1つを含んで構成されている請求項3に記載の関節運動補助具。
【請求項5】
前記補助力伝達部が力の伝達方向に延びる帯状とされている請求項1〜4の何れか1項に記載の関節運動補助具。
【請求項6】
前記補助力伝達部が衣服状の本体部に一体的に設けられており、該本体部の着用によって該補助力伝達部が使用者の関節を跨いで配設される請求項1〜5の何れか1項に記載の関節運動補助具。
【請求項7】
前記補助力伝達部における弾性変形可能な部分が、前記駆動源による引張力の作用方向の弾性に比してそれと直交する方向の弾性が小さくされている請求項1〜6の何れか1項に記載の関節運動補助具。
【請求項8】
前記補助力伝達部が使用者の股関節と膝関節の少なくとも一方を跨いで配設されている請求項1〜7の何れか1項に記載されている関節運動補助具。
【請求項9】
前記第1の装着部が使用者の大腿と膝関節の少なくとも一方に取り付けられていると共に、前記第2の装着部が使用者の腰部に取り付けられており、前記補助力伝達部が股関節を跨いで配設されている請求項8に記載の関節運動補助具。
【請求項10】
前記駆動源が前記第2の装着部に取り付けられている請求項9に記載の関節運動補助具。
【請求項11】
前記駆動源による引張力が、関節の屈伸運動に必要な力を補強するアシスト力として作用する請求項1〜10の何れか1項に記載の関節運動補助具。
【請求項12】
前記駆動源による引張力が、関節の屈伸運動に必要な力に抗するレジスト力として作用する請求項1〜11の何れか1項に記載の関節運動補助具。
【請求項1】
柔軟性を有する補助力伝達部の両端部分に対して、使用者の関節を挟んだ一方の部位に装着される第1の装着部と他方の部位に装着される第2の装着部とが設けられている一方、該補助力伝達部を通じて該第1の装着部と該第2の装着部との間に引張力を及ぼす駆動源が設けられていると共に、該補助力伝達部の少なくとも一部が該駆動源による引張力の作用方向で弾性変形可能とされていることを特徴とする関節運動補助具。
【請求項2】
使用者の関節の屈伸を検出するセンサが設けられていると共に、該センサの検出結果に基づいて前記駆動源を制御する制御装置が配設されている請求項1に記載の関節運動補助具。
【請求項3】
前記センサが、使用者の関節の屈伸に伴って該センサに及ぼされる力に基づいて使用者の関節の屈伸を検出可能とされている請求項2に記載の関節運動補助具。
【請求項4】
前記センサが、静電容量型センサおよび抵抗変化型センサの少なくとも1つを含んで構成されている請求項3に記載の関節運動補助具。
【請求項5】
前記補助力伝達部が力の伝達方向に延びる帯状とされている請求項1〜4の何れか1項に記載の関節運動補助具。
【請求項6】
前記補助力伝達部が衣服状の本体部に一体的に設けられており、該本体部の着用によって該補助力伝達部が使用者の関節を跨いで配設される請求項1〜5の何れか1項に記載の関節運動補助具。
【請求項7】
前記補助力伝達部における弾性変形可能な部分が、前記駆動源による引張力の作用方向の弾性に比してそれと直交する方向の弾性が小さくされている請求項1〜6の何れか1項に記載の関節運動補助具。
【請求項8】
前記補助力伝達部が使用者の股関節と膝関節の少なくとも一方を跨いで配設されている請求項1〜7の何れか1項に記載されている関節運動補助具。
【請求項9】
前記第1の装着部が使用者の大腿と膝関節の少なくとも一方に取り付けられていると共に、前記第2の装着部が使用者の腰部に取り付けられており、前記補助力伝達部が股関節を跨いで配設されている請求項8に記載の関節運動補助具。
【請求項10】
前記駆動源が前記第2の装着部に取り付けられている請求項9に記載の関節運動補助具。
【請求項11】
前記駆動源による引張力が、関節の屈伸運動に必要な力を補強するアシスト力として作用する請求項1〜10の何れか1項に記載の関節運動補助具。
【請求項12】
前記駆動源による引張力が、関節の屈伸運動に必要な力に抗するレジスト力として作用する請求項1〜11の何れか1項に記載の関節運動補助具。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2012−192013(P2012−192013A)
【公開日】平成24年10月11日(2012.10.11)
【国際特許分類】
【出願番号】特願2011−57470(P2011−57470)
【出願日】平成23年3月16日(2011.3.16)
【出願人】(504145342)国立大学法人九州大学 (960)
【出願人】(000219602)東海ゴム工業株式会社 (1,983)
【公開日】平成24年10月11日(2012.10.11)
【国際特許分類】
【出願日】平成23年3月16日(2011.3.16)
【出願人】(504145342)国立大学法人九州大学 (960)
【出願人】(000219602)東海ゴム工業株式会社 (1,983)
[ Back to top ]