
防除作業機

【課題】防除作業機が圃場で薬剤を散布しながら旋回しているときにおいて、防除作業機の散布ブームの操作に対する作業者の負担を低減すること。
【解決手段】防除作業機1は、車体1Bと、薬剤を散布する複数のノズル4が取り付けられるとともに、車体1Bの前後方向に対して両側にそれぞれ設けられる第1散布ブーム5L及び第2散布ブーム5Rと、車体1Bが旋回しているときに車体1Bの旋回方向外側に配置されている散布ブームを上昇させる散布ブーム自動上昇制御の実行と非実行とを切り替える自動リフトスイッチと、前記自動リフトスイッチが前記散布ブーム自動上昇制御を非実行としている場合において、旋回外側の散布ブームに設けられたノズル4に対する薬剤の供給が停止されたときには、旋回外側の散布ブームを上昇させる制御装置9と、を含む。
【解決手段】防除作業機1は、車体1Bと、薬剤を散布する複数のノズル4が取り付けられるとともに、車体1Bの前後方向に対して両側にそれぞれ設けられる第1散布ブーム5L及び第2散布ブーム5Rと、車体1Bが旋回しているときに車体1Bの旋回方向外側に配置されている散布ブームを上昇させる散布ブーム自動上昇制御の実行と非実行とを切り替える自動リフトスイッチと、前記自動リフトスイッチが前記散布ブーム自動上昇制御を非実行としている場合において、旋回外側の散布ブームに設けられたノズル4に対する薬剤の供給が停止されたときには、旋回外側の散布ブームを上昇させる制御装置9と、を含む。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、圃場に薬剤を散布する防除作業機に関する。
【背景技術】
【0002】
防除作業機は、圃場に農薬や肥料を散布する機械である。例えば、特許文献1には、左右方向に伸延させて昇降手段により略水平に昇降自在となしたセンターブームと、同センターブームの左右側端部に取り付けて、起倒手段により起倒自在となしたサイドブームと、これらのブームに取り付けた複数の薬液散布用のノズルとを具備し、サイドブームは、略水平に倒伏させて薬液を散布する使用位置と、後上方へ傾斜状に跳ね上げた収納位置との間で位置変更自在となしたブームスプレーヤ(防除装置)において、サイドブームは、略垂直面内で起倒自在となして、同略垂直面内にて使用位置を変更可能としたブームスプレーヤが記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2004−275930号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載された技術は、サイドブーム(散布ブーム)の使用位置を変更する操作をする際に、作業者の負担が大きくなるおそれがある。特に、防除作業機が旋回しているときには、作業者は防除作業機が作物を踏まないように旋回操作に集中する必要があるので、散布ブームの操作に対する作業者の負担をできる限り低減することが望まれている。
【0005】
本発明は、防除作業機が圃場で薬剤を散布しながら旋回しているときにおいて、防除作業機の散布ブームの操作に対する作業者の負担を低減することを目的とする。
【課題を解決するための手段】
【0006】
本発明は、操舵輪(3FL、3FR)と駆動輪(3FL、3FR、3RL、3RR)とを有する車体(1B)と、圃場(FW)に薬剤を散布する複数のノズル(4)が取り付けられるとともに、前記車体(1B)の前後方向に対して両側にそれぞれ設けられる一対の散布ブーム(5L、5R)と、前記操舵輪(3RL、3RR)が所定角度以上操舵されているときに、前記車体(1B)の旋回方向外側に配置されている散布ブーム(5L、5R)を上昇させる散布ブーム自動上昇制御の実行と非実行とを切り替える自動リフトスイッチ(88;88A)と、前記自動リフトスイッチ(88;88A)が前記散布ブーム自動上昇制御を非実行としている場合において、旋回外側の前記散布ブーム(5L、5R)に設けられた前記ノズル(4)に対する前記薬剤の供給が停止されたときには、旋回外側の前記散布ブーム(5L、5R)を上昇させる散布制御装置(9)と、を含むことを特徴とする防除作業機(1)である。
【0007】
本発明において、前記散布制御装置(9)は、旋回外側の前記散布ブーム(5L、5R)の前記ノズル(4)に前記薬剤の供給が開始されると、旋回外側の前記散布ブーム(5L、5R)を下降させることが好ましい。
【0008】
本発明において、前記散布制御装置(9)は、前記散布ブーム自動上昇制御を実行可能な状態に前記自動リフトスイッチ(88;88A)が切り替わっている場合に前記ノズル(4)に対する前記薬剤の供給が停止されると、前記薬剤の供給が停止されたノズル(4)が設けられている前記散布ブーム(5L、5R)を上昇させることが好ましい。
【0009】
本発明において、前記散布制御装置(9)は、前記ノズル(4)に対する前記薬剤の供給が開始されると、前記薬剤の供給が開始された前記ノズル(4)が設けられている前記散布ブーム(5L、5R)を、当該散布ブームが上昇する前の高さまで下降させることが好ましい。
【発明の効果】
【0010】
本発明は、防除作業機が圃場で薬剤を散布しながら旋回しているときにおいて、防除作業機の散布ブームの操作に対する作業者の負担を低減することができる。
【図面の簡単な説明】
【0011】
【図1】図1は、本実施形態に係る防除作業機の側面図である。
【図2】図2は、本実施形態に係る防除作業機の平面図である。
【図3】図3は、防除作業機が薬剤を散布する際の姿勢を示す正面図である。
【図4】図4は、防除作業機が薬剤を散布する際の姿勢を示す正面図である。
【図5】図5は、本実施形態に係る防除作業機が有する薬剤供給系統の一例を示す構成図である。
【図6】図6は、本実施形態に係る防除作業機が有する制御装置の構成例を示す模式図である。
【図7】図7は、本実施形態に係る防除作業機が有するGPS受信部の構成例を示す模式図である。
【図8】図8は、本実施形態に係る防除作業機が有する操作パネルの一例を示す模式図である。
【図9】図9は、本実施形態に係る防除作業機が圃場で薬剤を散布する際に旋回しているときの状態を示す模式図である。
【図10】図10は、本実施形態に係る散布ブームの第1制御例を示すフローチャートである。
【図11】図11は、本実施形態に係る散布ブームの第2制御例を示すフローチャートである。
【図12】図12は、本実施形態の変形例に係る表示・操作パネルの一例を示す図である。
【図13】図13は、本実施形態に係る散布ブームの第3制御例を示すフローチャートである。
【図14】図14は、本実施形態に係る散布ブームの第4制御例を示すフローチャートである。
【図15】図15は、本実施形態に係る散布ブームの第5制御例を示すフローチャートである。
【図16】図16は、本実施形態に係る散布ブームの第6制御例を示すフローチャートである。
【図17】図17は、本実施形態に係る散布ブームの第7制御例を示すフローチャートである。
【図18】図18は、本実施形態に係る散布ブームの第8制御例を示すフローチャートである。
【図19】図19は、本実施形態に係る散布ブームの第9制御例を示す図である。
【図20】図20は、本実施形態に係る散布ブームの第8制御例で用いる自動リフトスイッチを示す図である。
【図21】図21は、本実施形態に係る散布ブームの第9制御例を示すフローチャートである。
【図22】図22は、本実施形態に係る散布ブームの第10制御例を示すフローチャートである。
【発明を実施するための形態】
【0012】
本発明を実施するための形態(実施形態)につき、図面を参照しつつ詳細に説明する。以下の実施形態に記載した内容により本発明が限定されるものではない。また、以下に記載した構成要素には、当業者が容易に想定できるもの、実質的に同一のものが含まれる。さらに、以下に記載した構成要素は適宜組み合わせることが可能である。また、本発明の要旨を逸脱しない範囲で構成要素の種々の省略、置換又は変更を行うことができる。以下において、薬剤とは、肥料、農薬等を溶媒(例えば、水)に溶解させた液体及び肥料、農薬等の固形分を含む液体(例えば、水)等の液状物をいう。
【0013】
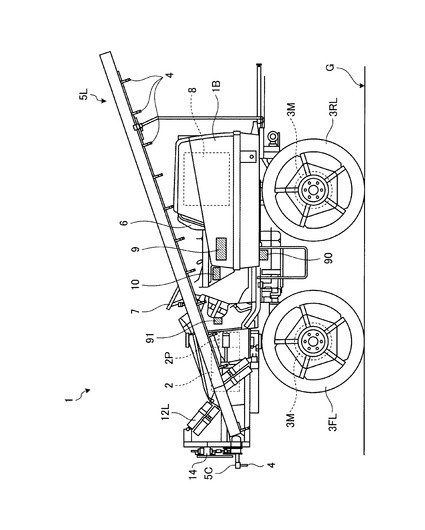
図1は、本実施形態に係る防除作業機の側面図である。図2は、本実施形態に係る防除作業機の平面図である。防除作業機1は、動力発生源が発生する動力によって走行して、薬剤を圃場に散布する作業用車両である。防除作業機1は、車体1Bと、車体1Bに搭載された動力発生源としての内燃機関(例えば、ディーゼルエンジン又はガソリンエンジン)2と、動力発生源が発生した動力を地面Gに伝えて防除作業機1を走行させる前輪3FL、3FR及び後輪3RL、3RRと、を含む。内燃機関2の出力は、油圧ポンプ2Pに入力される。油圧ポンプ2Pは、内燃機関2によって駆動されて、油圧機器を駆動するための作動油を吐出する。
【0014】
前輪3FL、3FR及び後輪3RL、3RRは、車体1Bに取り付けられて、これを支持している。前輪3FL、3FR及び後輪3RL、3RRには、それぞれ油圧モータ3Mが取り付けられている。また、後述するように、前輪3FL、3FRは防除作業機1の操舵輪である。このように、車体1Bは、操舵輪と駆動輪とを有する。油圧モータ3Mは、油圧ポンプ2Pから吐出された作動油によって回転し、前輪3FL、3FR及び後輪3RL、3RRを回転させる。このような構造によって、内燃機関2の動力が地面Gに伝えられて、防除作業機1を走行させる。なお、図1は、前輪3FL及び後輪3RLに油圧モータ3Mが取り付けられている状態を示しているが、前輪3FR及び後輪3RRについても同様に油圧モータ3Mが取り付けられている。
【0015】
本実施形態において、防除作業機1は、内燃機関2の動力を油圧ポンプ2P及び油圧モータ3Mを介して前輪3FL、3FR及び後輪3RL、3RRに伝達するが、内燃機関2の動力を、トランスミッションを介して前輪3FL、3FR及び後輪3RL、3RRに伝達してもよい。この場合、内燃機関2とトランスミッションとの間に油圧式無段変速装置(HST:Hydro Static Transmission)を設け、内燃機関2からの動力を油圧式無段変速装置(HST)の可変油圧ポンプに入力し、油圧式無段変速装置(HST)の定量油圧モータから出力した動力をトランスミッションに入力し、トランスミッション内の副変速装置を介して前輪3FL、3FR及び後輪3RL、3RRに動力伝達するようにしてもよい。
【0016】
防除作業機1は、薬剤を散布するための複数のノズル4と、複数のノズル4が取り付けられてこれらを支持する散布ブームとしての第1散布ブーム5L、第2散布ブーム5R及び第3散布ブーム5Cとを有する。第1散布ブーム5Lは、防除作業機1の前後方向の左側に配置され、第2散布ブーム5Rは、防除作業機1の前後方向の右側に配置される。防除作業機1の前後方向とは、防除作業機1の車体1Bに搭載される運転席6からハンドル7に向かう方向と平行な方向である。このように、第1散布ブーム5Lと第2散布ブーム5Rとは、防除作業機1の車体1Bの前後方向に対してそれぞれ両側に設けられる一対の散布ブームである。
【0017】
第3散布ブーム5Cは、防除作業機1の進行方向側かつ第1散布ブーム5Lと第2散布ブーム5Rとの間に配置される。防除作業機1の進行方向とは、防除作業機1の車体1Bに搭載される運転席6からハンドル7に向かう方向である。第1散布ブーム5Lと、第2散布ブーム5Rと、第3散布ブーム5Cとは、それぞれ複数のノズル4を有している。本実施形態において、複数のノズル4は、薬剤を散布するための噴射口が地面Gを向いているが、前記噴射口の向きはこれに限定されるものではなく、薬剤の散布対象に応じて適宜変更できる。
【0018】
第1散布ブーム5Lは、防除作業機1に旋回可能に取り付けられる旋回散布ブーム5BLと、旋回散布ブーム5BLに伸縮自在に支持される延長散布ブーム5SLとを有する。第2散布ブーム5Rも、第1散布ブーム5Lと同様に、防除作業機1に旋回可能に取り付けられる旋回散布ブーム5BRと、旋回散布ブーム5BRに伸縮自在に支持される延長散布ブーム5SRとを有する。図2に示すように、第1散布ブーム5L及び第2散布ブーム5Rは、圃場で薬剤を散布しないときには防除作業機1の車体1Bの前後方向に対して両側に折り畳まれている。
【0019】
薬剤の散布時において、第1散布ブーム5L及び第2散布ブーム5Rは、いずれも防除作業機1の進行方向側、すなわち前方に向かって、第3散布ブーム5Cと略平行になる位置まで旋回する(図2の矢印Rで示す方向)。図2においては、第1散布ブーム5L及び第2散布ブーム5Rは、図2の矢印Rで示す方向に旋回する。この位置で、第1散布ブーム5L及び第2散布ブーム5Rは防除作業機1に固定される。すると、第1散布ブーム5Lと第2散布ブーム5Rと第3散布ブーム5Cとは、略一直線上に配置されるので、これらに取り付けられた複数のノズル4も、略一直線上に配列される。
【0020】
また、防除作業機1は、第1散布ブーム5L又は第2散布ブーム5Rと、基準面(例えば、前輪3FL、3FR及び後輪3RL、3RRの車軸を含む平面又は水平面)とのなす角度を、それぞれ独立に変更することができる。防除作業機1は、第1散布ブーム5L又は第2散布ブーム5Rと基準面との角度を変更することにより、圃場と第1散布ブーム5L又は第2散布ブーム5Rとの距離を変更することができるので、圃場の作物と第1散布ブーム5L又は第2散布ブーム5Rとの距離も変更することができる。
【0021】
防除作業機1は、車体1Bの進行方向側かつ前後方向に対して両側に、それぞれ第1散布ブーム高さ調整装置としての左上下アクチュエータ12Lと、第2散布ブーム高さ調整装置としての右上下アクチュエータ12Rとを搭載している。また、防除作業機1は、車体1Bの進行方向側かつ前後方向に対して両側に、第1散布ブーム開閉装置としての左開閉アクチュエータ13Lと、第2散布ブーム開閉装置としての右開閉アクチュエータ13Rとを搭載している。左上下アクチュエータ12L、右上下アクチュエータ12R、左開閉アクチュエータ13L及び右開閉アクチュエータ13Rは、例えば、油圧シリンダ又はエアシリンダ等である。
【0022】
防除作業機1は、車体1Bの進行方向側に、水平バルブ14を搭載している。水平バルブ14は、第1散布ブーム5L、第2散布ブーム5R及び第3散布ブーム5Cと車体1Bの所定平面(例えば、前輪3FL、3FR及び後輪3RL、3RRの車軸を含む平面)とのなす角度を変更する装置である。例えば、防除作業機1が圃場で防除作業をしているときに、圃場の作付面(圃場において作物が作付けされている部分の表面)に対して防除作業機1が傾斜したような場合、第1散布ブーム5L、第2散布ブーム5R及び第3散布ブーム5Cが圃場に対して傾斜することがある。この場合、水平バルブ14は、第1散布ブーム5L、第2散布ブーム5R及び第3散布ブーム5Cと車体1Bの所定平面とのなす角度を変更して、第1散布ブーム5L、第2散布ブーム5R及び第3散布ブーム5Cと作付面とが平行になるようにする。このようにすることで、防除作業機1が作付面に対して傾斜しても、作物とノズル4との距離を略一定に保持することができる。
【0023】
防除作業機1は、車体1Bの進行方向側に、ブームストロークセンサ95と、リンク角速度センサ96と、リンク傾斜センサ97とを搭載している。また、防除作業機1は、車体1Bの進行方向側かつ前後方向に対して両側に、ブーム角度右センサ98Rとブーム角度左センサ98Lとを搭載し、また、ブーム開閉右センサ99Rとブーム開閉左センサ99Lとを搭載する。ブームストロークセンサ95は、第1散布ブーム5L及び第2散布ブーム5Rの長さを検出する。リンク角速度センサ96は、第1散布ブーム5L、第2散布ブーム5R及び第3散布ブーム5Cを車体1Bに取り付けるリンクの角速度を検出する。リンク傾斜センサ97は、第1散布ブーム5L、第2散布ブーム5R及び第3散布ブーム5Cを車体1Bに取り付けるリンクの水平面に対する傾斜を検出する。ブーム角度右センサ98Rは、第2散布ブーム5Rの前記基準面に対する傾斜角度を検出し、ブーム角度左センサ98Lは、第1散布ブーム5Lの前記基準面に対する傾斜角度を検出する。ブーム開閉右センサ99Rは、第2散布ブーム5Rが閉じているか又は開いているかを検出し、ブーム開閉左センサ99Lは、第1散布ブーム5Lが閉じているか又は開いているかを検出する。ブームストロークセンサ95、リンク角速度センサ96、リンク傾斜センサ97、ブーム角度右センサ98R、ブーム角度左センサ98L、ブーム開閉右センサ99R及びブーム開閉左センサ99Lは、後述する制御装置9と電気的に接続されている。制御装置9は、これらのセンサが検出した値を取得して、防除作業機1の制御に用いる。
【0024】
防除作業機1は、制御装置9と、GPS受信部10と、表示・操作パネル11と、防除作業機1が走行する速度を検出する速度検出手段としての車速センサ90と、操舵輪の操舵角度を検出する操舵角検出手段としての操舵角センサ91とを有する。制御装置9は、防除作業機1の制御、例えば、GPS受信部10から得られる情報に基づいて防除作業機1が圃場の薬剤を散布する領域へ進入際の進入位置を求めたり、ノズル4から散布される薬剤の供給量を制御したり、内燃機関2を制御したりする。GPS受信部10は、GPS衛星から送信される電波を受信する。表示・操作パネル11は、作業者からの入力を受け付けたり、防除作業機1の運転条件を表示したり、防除作業機1の状態を表示したりする。制御装置9、GPS受信部10及び表示・操作パネル11については後述する。車速センサ90は、例えば、前輪3FL、3FR、後輪3RL、3RRの回転速度から又はトランスミッション内の歯車の回転から、防除作業機1の速度(車速)を検出する。操舵角センサ91は、ハンドル7の回転角度から、前輪3FL、3FRの操舵角を検出する。すなわち、防除作業機1は、前輪3FL、3FRが操舵輪となる。
【0025】
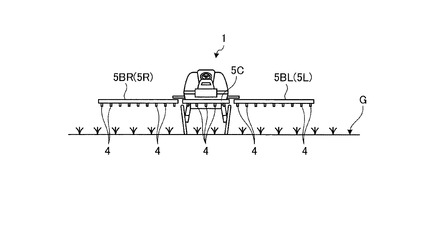
図3、図4は、防除作業機が薬剤を散布する際の姿勢を示す正面図である。図3は、図2に示す旋回散布ブーム5BL、5BRから延長散布ブーム5SL、5SRが伸びていない状態を示している。図4は、旋回散布ブーム5BL、5BRから延長散布ブーム5SL、5SRが伸びている状態を示している。いずれの状態においても、地面G上の防除作業機1は、第1散布ブーム5Lと第2散布ブーム5Rと第3散布ブーム5Cとが略一直線上に配置された状態で、複数のノズル4から薬剤を散布する。すなわち、防除作業機1は、第1散布ブーム5Lと第2散布ブーム5Rとを左右に開いた状態で複数のノズル4から薬剤を散布する。なお、防除作業機1は、車体1Bの前後方向両側にそれぞれ設けられた第1散布ブーム5Lと第2散布ブーム5Rとが、車体1Bに収納された状態と左右に開いた状態との間に存在する状態においても、複数のノズル4から薬剤を散布することができる。
【0026】
図4に示すように、旋回散布ブーム5BL、5BRからそれぞれ延長散布ブーム5SL、5SRが伸びると、第1散布ブーム5Lの先端と第2散布ブーム5Rの先端との距離は、延長散布ブーム5SL、5SRが伸びない場合よりも大きくなる。第1散布ブーム5Lの付け根(第3散布ブーム5Cとの接続部)と先端との距離及び第2散布ブーム5Rの付け根(第3散布ブーム5Cとの接続部)と先端との距離は、ブームストロークセンサ95が検出する。
【0027】
本実施形態において、旋回散布ブーム5BL、5BRから延長散布ブーム5SL、5SRが伸びる距離は、無段階又は段階的に調整することができるよう構成されるとともに、旋回散布ブーム5BL、5BRと延長散布ブーム5SL、5SRとが重複する個所の旋回散布ブーム5BL、5BR側に存在するノズルへの薬剤の供給を遮断できるよう構成されている。このような構成としては、例えば、旋回散布ブーム5BL、5BRの各ノズルに切替コックを備え、前記切替コックの開閉切替を作動させる切替部材を機外に配置するとともに、延長散布ブーム5SL、5SR側に作動片を設ける。このような構成として、延長散布ブーム5SL、5SRが往・復する際に前記切替コックへ接当させることによって、コック切替をすることができる。このような構造により、防除作業機1は、圃場における薬剤の散布領域に応じて、薬剤を散布する幅(散布幅)を変更することができる。また、防除作業機1は、複数のノズル4から薬剤を散布するノズルを選択して薬剤を散布することができる。このように、防除作業機1は、薬剤の散布幅と薬剤を散布するノズルの数及び位置とを変更することによって、薬剤の様々な散布条件に対応することができる。次に、薬剤供給系統8について説明する。
【0028】
図5は、本実施形態に係る防除作業機が有する薬剤供給系統の一例を示す構成図である。防除作業機1は、薬剤供給系統8を有している。薬剤供給系統8は、複数のノズル4に薬剤を供給するシステムである。薬剤供給系統8は、タンク20と、給水ホース21と、吐水ホース22と、散布ホース23と、撹拌ホース24と、余水ホース25と、給水コック26と、ポンプ27と、フィルタ28と、流量制御弁29と、分岐装置30と、安全弁31と、圧力センサ92と、流量センサ93と、弁開度センサ94とを含む。以下において、「水」は、薬剤を含むものとする。タンク20は、ノズル4が散布する薬液を蓄える。給水ホース21は、タンク20からフィルタ28を介して、ポンプ27までタンク20内の薬剤を導くための配管である。吐水ホース22は、ポンプ27から分岐装置30まで薬剤を導くための配管である。散布ホース23は、分岐装置30から第1散布ブーム5L及び第2散布ブーム5R及び第3散布ブーム5Cまで薬剤を導くための配管である。第1散布ブーム5Lの延長散布ブーム5SL及び第2散布ブーム5Rの延長散布ブーム5SRに取り付けられた複数のノズル4へ薬剤を導くための散布ホース23は、それぞれフレキシブルホース23EL、23ERを有している。このような構造により、フレキシブルホース23EL、23ERは、延長散布ブーム5SL、5SRが伸縮しても、その動きを許容する。撹拌ホース24は、タンク20内の薬液を撹拌するために、常時所定の流量の薬剤をタンク20内に流すための配管である。撹拌ホース24は、吐水ホース22から分岐してタンク20に接続されている。余水ホース25は、散布及び撹拌に使用しなかった薬剤をタンク20内に戻すための配管である。
【0029】
給水コック26は、タンク20とフィルタ28との間に設けられて、フィルタ28の交換、掃除等を行うときにタンク20からの給水を止めるときに使用する。フィルタ28は、タンク20内の薬剤からごみ等を除去する。ポンプ27は、フィルタ28を通過した薬剤を吸引した後に加圧して、吐水ホース22を介して流量制御弁29に向かって吐出する。流量制御弁29は、分岐装置30へ流す薬剤の流量を調整する装置であって、図1、図2に示す制御装置9によって制御される。分岐装置30は、流量制御弁29から送られてきた薬剤を3本の散布ホース23に分岐させて、第1散布ブーム5Lと第2散布ブーム5Rと第3散布ブーム5Cとがそれぞれ有する複数のノズル4へ薬剤を供給する。
【0030】
分岐装置30の出口側には、第1散布コック32Lと第2散布コック32Rと第3散布コック32Cとが設けられている。第1散布コック32Lは、分岐装置30と第1散布ブーム5Lのノズル4との間に配置されており、分岐装置30から第1散布ブーム5Lのノズル4に対する薬剤の供給と非供給とを切り替える。第2散布コック32Rは、分岐装置30と第2散布ブーム5Rのノズル4との間に配置されており、分岐装置30から第2散布ブーム5Rのノズル4に対する薬剤の供給と非供給とを切り替える。第3散布コック32Cは、分岐装置30と第3散布ブーム5Cのノズル4との間に配置されており、分岐装置30から第3散布ブーム5Cのノズル4に対する薬剤の供給と非供給とを切り替える。第1散布コック32L、第2散布コック32R及び第3散布コック32Cは、直接作業者がこれらを開閉する方式であってもよいし、アクチュエータがこれらを開閉する方式であってもよい。第1散布コック32L、第2散布コック32R及び第3散布コック32Cには、これらの状態(閉じているか、開いているか)を検出するための開閉センサが取り付けられており、制御装置9は、前記開閉センサの出力を取得して、第1散布コック32L、第2散布コック32R及び第3散布コック32Cの状態を把握する。安全弁31は、吐水ホース22内の薬剤の圧力が過度に上昇した場合に、薬剤をタンク20に戻して吐水ホース22内の薬剤の圧力上昇を抑制するための装置である。
【0031】
流量センサ93は、流量制御弁29と分岐装置30との間に設けられている。流量センサ93は、分岐装置30へ流入する薬剤の流量、すなわち、ノズル4から散布される薬剤の流量を検出して、図1、図2に示す制御装置9に送信する。圧力センサ92は、分岐装置30に設けられている。圧力センサ92は、散布ホース23へ送られる薬剤の圧力を検出し、図1、図2に示す制御装置9に送信する。弁開度センサ94は、流量制御弁29に設けられている。弁開度センサ94は、流量制御弁29の開度を検出して、図1、図2に示す制御装置9に送信する。制御装置9は、圧力センサ92、流量センサ93及び弁開度センサ94が検出した情報に基づき、ポンプ27及び流量制御弁29を制御して、散布される薬剤の流量を調整する。次に、制御装置9について説明する。
【0032】
図6は、本実施形態に係る防除作業機が有する制御装置の構成例を示す模式図である。制御装置9は、制御用プロセッサ40と、記憶部41と、入力インターフェース42a〜42qと、入出力インターフェース43と、出力インターフェース44a〜44mとを含む。制御用プロセッサ40は、コンピュータにおいてソフトウェアを動作させる演算装置(ハードウェア)であり、コンピュータプログラムの命令を解釈し実行する機能を有する。制御用プロセッサ40は、防除作業機1が有する内燃機関2及び薬剤供給系統8等を制御するためのコンピュータプログラムの命令を解釈し実行することにより、防除作業機1全体を制御する。この他にも、制御用プロセッサ40は、第1散布ブーム5L及び第2散布ブーム5Rの昇降及び開閉を制御したり、第1散布ブーム5L、第2散布ブーム5R及び第3散布ブーム5Cの傾斜を制御したりする散布制御装置としても機能する。この場合、制御用プロセッサ40は、第1散布ブーム5L、第2散布ブーム5R及び第3散布ブーム5Cの動作の制御を実現するための命令が記述されたコンピュータプログラムの命令を解釈し実行することにより、散布制御装置として機能する。
【0033】
記憶部41は、RAM(Random Access Memory)41Aと、ROM(Read Only Memory)41Bと、EEPROM(Electrically Erasable Programmable Read Only Memory)41Cとを含む。RAM41Aは、電源の供給が絶たれると記憶内容が失われる揮発性メモリであり、ROM41B及びEEPROM41Cは、電源を供給しなくとも記憶内容を保持する不揮発性メモリである。EEPROM41Cは、記憶内容を電気的に消去できるとともに、新たな情報を記憶することができる。記憶部41は、防除作業機1の制御を実現するためのコンピュータプログラム及びデータ並びに散布制御装置としての機能を実現するためのコンピュータプログラム及びデータ等を記憶する。本実施形態において、ROM41Bはコンピュータプログラム等を記憶し、EEPROM41Cは制御装置9の動作中に得られたデータ等を記憶する。RAM41Aは、制御装置9の動作中において、ROM41Bに記憶されたコンピュータプログラムを展開する。
【0034】
入力インターフェース42a〜42qは、それぞれ、自動リフトスイッチ88、操舵角センサ91、ポンプスイッチ81、車速センサ90、圧力センサ92、流量センサ93、弁開度センサ94、設定スイッチ82、ブームストロークセンサ95、リンク角速度センサ96、リンク傾斜センサ97、ブーム角度右センサ98R、ブーム角度左センサ98L、ブーム開閉右センサ99R、ブーム開閉左センサ99Lが接続される。入力インターフェース42a〜42qは、自身に入力される情報を、制御用プロセッサ40が利用できる形に変換して制御用プロセッサ40へ入力する。入出力インターフェース43は、GPS受信部10の送受信回路56が接続される。後述するように、GPS受信部10は、GPS車速Vgを生成する。送受信回路56は、GPS車速Vgを入出力インターフェース43に送信し、また、制御用プロセッサ40からの命令を、入出力インターフェース43を介して受信する。入出力インターフェース43は、GPS受信部10と制御用プロセッサ40との間に介在し、両者の間で情報のやりとりができるようにする。
【0035】
出力インターフェース44a、44c〜44mは、それぞれ、流量制御モータ29M、ポンプ27、ブザー83、表示部11D、水平バルブ14、右上下アクチュエータ12R、左上下アクチュエータ12L、右開閉アクチュエータ13R、左開閉アクチュエータ13L、右伸縮アクチュエータ15R、左伸縮アクチュエータ15Lに接続される。流量制御モータ29Mは、図5に示す流量制御弁29の弁開度を調整するための装置である。出力インターフェース44bは、制御用プロセッサ40が生成した、流量制御モータ29Mの回転方向を切り替えるための情報を、モータ回転方向切替出力RDに変換して出力する。流量制御モータ29Mは、モータ回転方向切替出力RDによって回転方向が切り替えられる。出力インターフェース44a〜44mは、制御用プロセッサ40が生成した流量制御モータ29M、ポンプ27、右上下アクチュエータ12R及び左上下アクチュエータ12L等を制御するための命令を、これらの機器が利用できる形に変換して出力する。
【0036】
防除作業機1は、車速に連動させて薬剤の散布量を制御する。このような制御を、車速連動散布制御という。制御用プロセッサ40は、すべてのノズル4から散布される薬剤の流量(単位時間当たりの散布量)をパラメータとした演算式を用いて、車速連動散布制御を実現する。すなわち、制御用プロセッサ40は、薬剤の散布条件に基づき、防除作業機1の車速に連動して薬剤を散布する。作業者は、表示・操作パネル11から、ノズル定数(散布圧力10kgf/cm2時におけるノズル一個あたりの噴霧量L/min)と散布圧力(kgf/cm2)と、10アールあたりの目標散布量(L/10a)とを入力する。制御用プロセッサ40は、防除作業機1の車速及び前記目標散布量等を用いて、図5に示す散布ホース23へ送られる薬剤の設定圧力を計算する。そして、制御用プロセッサ40は、計算した設定圧力となるように、散布ホース23へ供給される薬剤の量を調整する。薬剤の量は、制御用プロセッサ40が、流量制御モータ29Mを駆動して流量制御弁29の開度を調整することにより調整される。ここで、防除作業機1の車速は、GPS受信部10が生成した防除作業機1の車速又は車速センサ90により検出された防除作業機1の車速である。次に、GPS受信部10について説明する。
【0037】
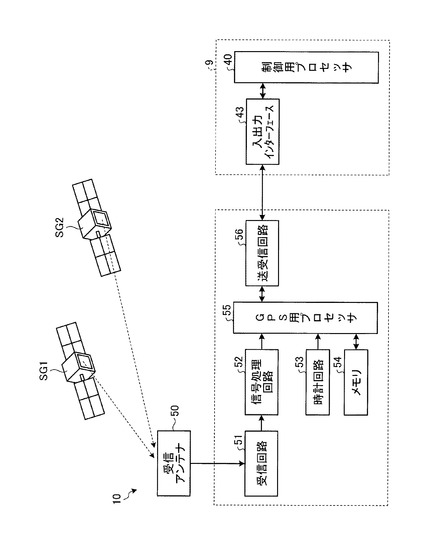
図7は、本実施形態に係る防除作業機が有するGPS受信部の構成例を示す模式図である。GPS受信部10は、複数のGPS衛星SG1、SG2等から受信した電波に基づき、防除作業機1の位置に関する情報(位置情報)及びGPS車速Vg等を出力する。GPS受信部10は、受信アンテナ50と、受信回路51と、信号処理回路52と、時計回路53と、メモリ54と、GPS用プロセッサ55と、送受信回路56とを含む。
【0038】
受信アンテナ50は、複数のGPS衛星SG1、SG2等が発信した電波を受信する。受信回路51は、受信アンテナ50と接続されており、受信アンテナ50が受信したGPS衛星SG1、SG2等が発信した電波を電気信号に変換する。信号処理回路52は、受信回路51が出力した電気信号を、GPS用プロセッサ55が利用できる形に変換して出力する。時計回路53は、時刻を計時してGPS用プロセッサ55へ入力する。メモリ54は、GPS用プロセッサ55の処理に必要なデータを記憶したり、GPS用プロセッサ55の処理に必要なコンピュータプログラムを展開したりする。
【0039】
GPS用プロセッサ55は、複数のGPS衛星SG1、SG2等が発信した電波に基づき、GPS受信部10の位置についての情報を計算し、送受信回路56に出力する。また、GPS用プロセッサ55は、GPS受信部10の位置についての情報に基づき、GPS受信部10の速度を計算し、送受信回路56に出力する。GPS受信部10は、防除作業機1に搭載されているので、GPS受信部10の位置についての情報は、防除作業機1の位置に関する情報(位置情報)となる。また、前記速度は、GPS衛星SG1、SG2の電波に基づいて得られた防除作業機1の車速であり、これが上述したGPS車速Vgである。
【0040】
送受信回路56は、制御装置9が有する制御用プロセッサ40と、制御装置9の入出力インターフェース43を介して接続されている。送受信回路56は、GPS用プロセッサ55が求めた位置情報を制御装置9の入出力インターフェース43を介して制御用プロセッサ40へ出力する。制御用プロセッサ40は、前記位置情報を用いて、防除作業機1を制御したり、GPS受信部10に対してデータの変更要求を発信したりする。なお、GPS車速Vgは、制御装置9の制御用プロセッサ40が、GPS受信部10から得た位置情報に基づいて求めるようにしてもよい。また、本実施形態において、防除作業機1は、GPS受信部10を備えていなくてもよい。
【0041】
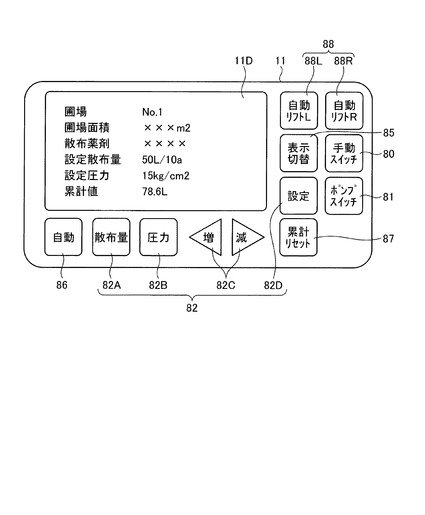
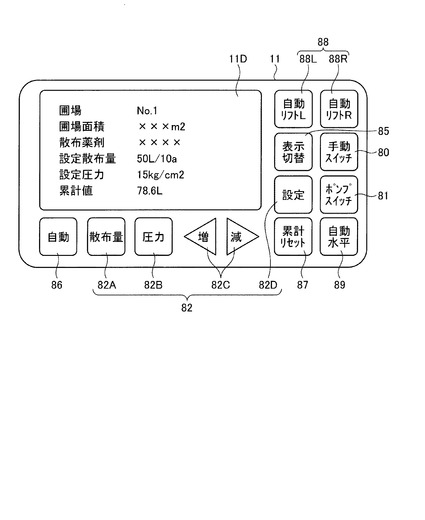
図8は、本実施形態に係る防除作業機が有する操作パネルの一例を示す模式図である。表示・操作パネル11は、表示部11Dと、手動スイッチ80と、ポンプスイッチ81と、設定スイッチ82と、累計リセットスイッチ87と、表示切替スイッチ85と、自動スイッチ86と、自動リフトスイッチ88とを含む。表示部11Dは、図6に示す制御用プロセッサ40が求めた、防除作業機1が圃場の薬剤を散布する領域へ進入する進入位置を表示する。また、表示部11Dは、防除作業機1が薬剤を散布する圃場に関する情報、散布する薬剤に関する情報、防除作業機1の運転状態に関する情報等を表示する。圃場に関する情報としては、例えば、圃場の位置及び面積がある。後者に関する情報としては、例えば、薬剤の種類、散布量、図5に示すポンプ27の吐出圧力の設定値(設定圧力)、散布した薬剤の累計値等がある。表示部11Dは、例えば、液晶ディスプレイ、有機ELディスプレイ等を用いることができる。
【0042】
手動スイッチ80は、薬剤の散布において、作業者が自身の操作で薬剤の散布条件を変更したり、散布幅を変更したりする場合に操作する入力手段である。手動スイッチ80が操作されると、図6に示す制御装置9は、設定スイッチ82が散布条件の変更あるいは散布幅の変更を受け付けるように設定する。ポンプスイッチ81は、図5に示すポンプ27を起動させるための入力手段である。ポンプスイッチ81が操作されると、ポンプ27が起動し、薬剤の散布が開始される。設定スイッチ82は、薬剤の散布条件を入力するための入力手段である。設定スイッチ82は、薬剤の散布量を設定するための散布量設定スイッチ82Aと、ポンプ27の吐出圧力を設定するための圧力設定スイッチ82Bと、設定値を増減させる増減スイッチ82Cと、設定を確定するための設定スイッチ82Dとを含む。累計リセットスイッチ87は、散布した薬剤の累計量をリセットする際に用いられる入力手段である。表示切替スイッチ85は、表示部11Dに表示される情報を切り替える際に用いられる入力手段である。自動スイッチ86は、薬剤の散布において、設定された散布条件で薬剤を自動散布する場合に操作される入力手段である。この自動スイッチ86がONとなるように操作されると、車速センサからの情報に基づき散布量が均一になるように調整されて自動散布される。そして、走行停止状態では自動的に散布停止となる。
【0043】
自動リフトスイッチ88は、防除作業機1の操舵輪、すなわち前輪3FL、3FRが所定角度以上操舵されているときに、車体1Bの旋回方向外側に配置されている散布ブームを上昇させる散布ブーム自動上昇制御の実行と非実行とを切り替える。自動リフトスイッチ88がONになっているときには、前記散布ブーム自動上昇制御が実行され、自動リフトスイッチ88がOFFになっているときには、前記自動上昇制御が実行されない。
【0044】
自動リフトスイッチ88は、第1自動リフトスイッチ88Lと、第2自動リフトスイッチ88Rとを含む。第1自動リフトスイッチ88Lは、第1散布ブーム5Lの散布ブーム自動上昇制御の実行と非実行とを切り替える。第2自動リフトスイッチ88Rは、第2散布ブーム5Rの散布ブーム自動上昇制御の実行と非実行とを切り替える。このように、本実施形態では、第1散布ブーム5Lの散布ブーム自動上昇制御の切り替えと、第2散布ブーム5Rの散布ブーム自動上昇制御の切り替えとをそれぞれ独立して実行することができる。例えば、第1散布ブーム5Lに対してのみ散布ブーム自動上昇制御を実行させ、第2散布ブーム5Rに対しては散布ブーム自動上昇制御を実行させないようにすることもできる。なお、第1散布ブーム5Lの散布ブーム自動上昇制御と、第2散布ブーム5Rの散布ブーム自動上昇制御とを連動して切り替えられるようにしてもよい。
【0045】
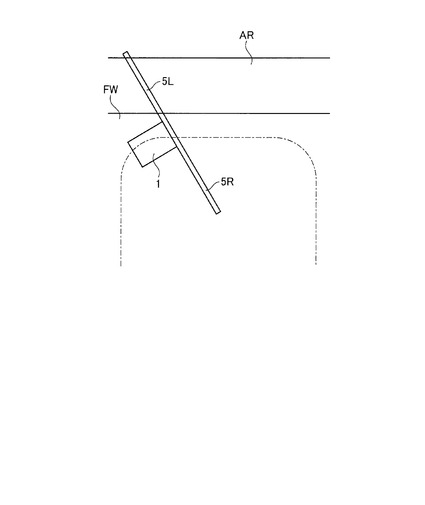
図9は、本実施形態に係る防除作業機が圃場で薬剤を散布する際に旋回しているときの状態を示す模式図である。防除作業機1は、圃場FWにおいて、作物が植えられていない端部まで到達すると、旋回進行方向を180度変更した後、次の薬剤散布領域へ進入する。図9に示す一点鎖線は、防除作業機1の旋回時における幅方向中心の軌跡である。圃場FWの端部は、畦道AR又は圃場に隣接していることが多いので、防除作業機1が旋回する場合、第1散布ブーム5L又は第2散布ブーム5Rの高さが旋回前と同じであると、畦道AR又は隣接する圃場に第1散布ブーム5L又は第2散布ブーム5Rが張り出すおそれがある。このため、本実施形態において、散布制御装置として機能する制御装置9は、上述した散布ブーム自動上昇制御を実行することにより、防除作業機1の制御の旋回時においては、旋回方向外側の散布ブームを自動的に上昇させる。このようにすることで、制御装置9は、散布ブームが畦道AR等に張り出して、建物、隣接する圃場の作物若しくは畦道AR等に存在する車両等の物体又は畦道AR等に存在する人間若しくは動物等の生物といった、防除作業機1の周辺に存在する生物又は物等と干渉するおそれを低減することができる。同時に、防除作業機1の旋回時において、散布ブームの操作に対する作業者の負担を軽減することができる。本実施形態において、さらに、制御装置9は、防除作業機1が旋回する際に、作業者の負担を軽減し、かつ旋回方向外側の散布ブームが畦道AR又は隣接する圃場に散布ブームが張り出すおそれをより確実に低減するように散布ブームを制御する。次に、防除作業機1が旋回する際における散布ブームの第1制御例を説明する。
【0046】
(第1制御例)
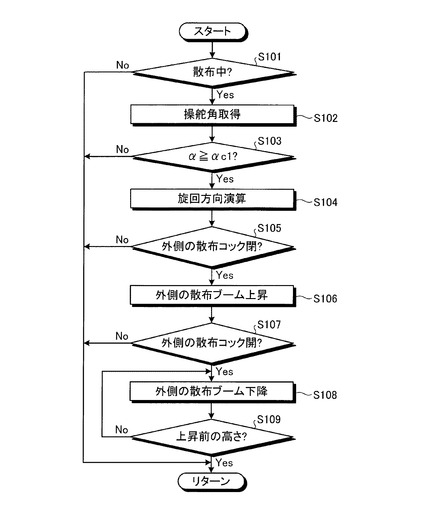
図10は、本実施形態に係る散布ブームの第1制御例を示すフローチャートである。第1制御例は、自動リフトスイッチ88が散布ブーム自動上昇制御を非実行としている場合において、防除作業機1の旋回外側の散布ブームに設けられたノズル4に対する薬剤の供給が停止されたときには、制御装置9が旋回外側の散布ブームを上昇させる点に特徴がある。また、第1制御例は、旋回外側の散布ブームのノズル4に薬剤の供給が開始されると、旋回外側の散布ブームを上昇前の高さまで下降させる。第1制御例を実行するにあたり、ステップS101において、制御装置9は、防除作業機1が薬剤を散布中である場合(ステップS101、Yes)、処理をステップS102へ進める。防除作業機1が薬剤を散布中でない場合(ステップS101、No)、制御装置9は、処理をSTARTに戻す。
【0047】
制御装置9は、例えば、図6に示す流量制御モータ29Mが駆動中である場合、例えば、流量制御モータ29Mに駆動電流が流れている場合には、防除作業機1が薬剤を散布中であるとして(ステップS101、Yes)、処理をステップS102へ進める。ステップS102において、制御装置9は、防除作業機1の操舵輪の操舵角αを、操舵角センサ91から取得する。そして、制御装置9は、処理をステップS103へ進める。ステップS103において、制御装置9は、ステップS102で取得した操舵角αと、予め定めた操舵角閾値αc1とを比較する。前記比較の結果、制御装置9は、α≧αc1である場合(ステップS103、Yes)には処理をステップS104へ進め、α<αc1である場合(ステップS103、No)には処理をSTARTに戻す。
【0048】
操舵角閾値αc1は、防除作業機1が旋回中であると判断できる程度の大きさに設定されて、例えば、記憶部41のROM41B又はEEPROM41Cに保存される。なお、α<αc1である場合、防除作業機1は直進状態又は旋回半径の大きい旋回状態である。圃場によっては湾曲した部分もあるので、防除作業機1は、大きな旋回半径で旋回しながら薬剤を散布することもある。ステップS103において、制御装置9は、α≧αc1である時間が所定時間以上継続した場合に、防除作業機1が旋回中であるとして、処理をステップS104に進めてもよい。このようにすれば、より確実に防除作業機1が旋回中であることの判定精度が向上する。
【0049】
ステップS104において、制御装置9は、防除作業機1の旋回方向を演算する。旋回方向は、例えば、操舵角センサ91が検出した防除作業機1のハンドル7の回転方向から求めることができる。制御装置9は、前記旋回方向を演算したら、処理をステップS105へ進める。ステップS105において、制御装置9は、旋回外側の散布ブームに取り付けられたノズル4へ薬剤を供給する散布コック(旋回外側用散布コック)が閉じている場合(ステップS105、Yes)、処理をステップS106へ進め、旋回外側の散布コックが閉じていない場合、すなわち、開いている場合(ステップS105、No)、処理をSTARTに戻す。
【0050】
例えば、防除作業機1が右旋回している場合、旋回外側の散布ブームは防除作業機1の進行方向左側に配置された散布ブーム、すなわち、第1散布ブーム5Lである。また、防除作業機1が左旋回している場合、旋回外側の散布ブームは防除作業機1の進行方向右側に配置された散布ブーム、すなわち、第2散布ブーム5Rである。第1散布ブーム5Lが旋回外側である場合、制御装置9は、図5に示す第1散布コック32Lが閉じているか、開いているかによってステップS105の分岐を異ならせる。第2散布ブーム5Rが旋回外側である場合、制御装置9は、図5に示す第2散布コック32Rが閉じているか、開いているかによってステップS105の分岐を異ならせる。
【0051】
旋回外側用散布コックが閉じている場合(ステップS105、Yes)、制御装置9は、ステップS106において、旋回外側の散布ブームを上昇させる。第1散布ブーム5Lが旋回外側である場合、制御装置9は、図2、図6に示す左上下アクチュエータ12Lを動作させて、第1散布ブーム5Lを上昇させる。第2散布ブーム5Rが旋回外側である場合、制御装置9は、図2、図6に示す右上下アクチュエータ12Rを動作させて、第2散布ブーム5Rを上昇させる。このように、制御装置9は、旋回外側の散布ブームに設けられたノズル4に対する薬剤の供給が停止されたとき(旋回外側用散布コックが閉じられたとき)には、旋回外側の散布ブームを上昇させる。すなわち、散布コックが閉じられている場合には、その散布コックに対応するノズル4からは薬剤を散布しないと判断できるので、薬剤を散布しないノズル4が設けられている散布ブームを上昇させる。また、薬剤の散布作業において、作業者が、散布コックの開閉を忘れる可能性は低いと考えられるので、旋回外側用散布コックが閉じられたときに、旋回外側の散布ブームを上昇させるようにすることで、旋回外側の散布ブームが防除作業機1の周囲に存在する生物又は物と干渉するおそれをより確実に低減できる。
【0052】
このように、第1制御例は、図8に示す自動リフトスイッチ88がON又はOFFに関わらず、旋回外側の散布コックが閉じられている場合には、旋回外側の散布ブームを上昇させる。このようにすることで、畦道又は隣接する圃場と旋回外側の散布ブームとの干渉を回避するとともに、散布コックの開閉と旋回外側の散布ブームの上昇とを連動させることで、防除作業機1の旋回時における散布ブームの操作に対する作業者の負荷を低減することができる。また、防除作業機1の作業者が、自動リフトスイッチ88をONにし忘れていた場合であっても、旋回外側用散布コックが閉じられたことにより旋回外側の散布ブームを上昇させて、隣接する圃場と旋回外側の散布ブームとの干渉を回避できるので、作業者の操作に対する負荷を低減できる。特に、作業者が防除作業機1を旋回させているときには、作物をできる限り踏み倒さないように細心の注意を払っている。第1制御例は、旋回外側用散布コックが閉じられたことによって制御装置9が旋回外側の散布ブームを自動的に上昇させるので、作業者の操作に対する負荷を低減して、作業者は旋回操作に集中することができるという利点がある。さらに、隣接する圃場の作物、特に丈の高い作物と旋回外側の散布ブームとの干渉も回避できる。さらに、枕地付近の旋回においては、旋回外側の散布ブームが折損するおそれも大幅に低減できる。
【0053】
制御装置9は、旋回外側の散布ブームを上昇させたらステップS107へ進む。ステップS107において、制御装置9は、旋回外側用散布コックが開になった場合(ステップS107、Yes)、処理をステップS108に進め、旋回外側用散布コックが開になっていない場合、すなわち、閉のままである場合(ステップS107、No)、処理をSTARTに戻す。
【0054】
旋回外側用散布コックが開かれた場合、旋回外側の散布ブームに取り付けられたノズル4から薬剤の散布を再開すると判断できる。このため、旋回外側用散布コックが開になった場合(ステップS107、Yes)、ステップS108において、制御装置9は、外側の散布ブームを下降させる。このように、制御装置9は、旋回外側の散布ブームに設けられたノズル4に対する薬剤の供給が開始されたとき(旋回外側用散布コックが開かれたとき)には、旋回外側の散布ブームを下降させる。
【0055】
次に、ステップS109に進み、制御装置9は、下降させている旋回外側の散布ブームの高さが上昇前の高さになっていない場合(ステップS109、No)、旋回外側の散布ブームの高さが上昇前の高さになるまで、旋回外側の散布ブームを下降させる。下降させている旋回外側の散布ブームの高さが上昇前の高さになった場合(ステップS109、Yes)、制御装置9は、処理をSTARTに戻し、防除作業機1の旋回及び散布コックの状態を監視しながら、第1制御例を継続する。このようにすることで、作業者の操作に対する負荷を軽減できるとともに、防除作業機1を安全に旋回させることができる。また、薬剤の散布を再開するときには、上昇させていた散布ブームを確実かつ適正な位置に下降させて薬剤を散布することができるので、散布精度が向上する。次に、防除作業機1が旋回する際における散布ブームの第2制御例を説明する。
【0056】
(第2制御例)
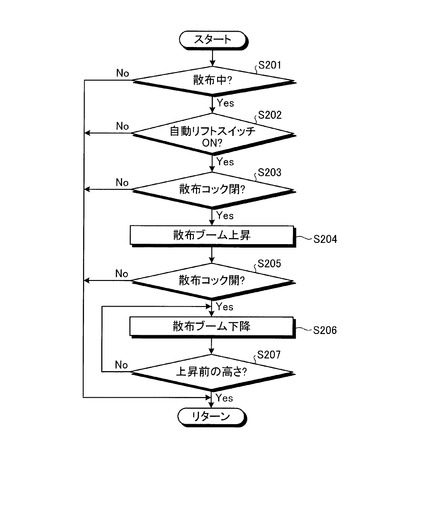
図11は、本実施形態に係る散布ブームの第2制御例を示すフローチャートである。第2制御例は、散布ブーム自動上昇制御を実行可能な状態に自動リフトスイッチ88が切り替わっている場合、すなわち、自動リフトスイッチ88がONになっている場合、ノズル4に対する薬剤の供給が停止されると、薬剤の供給が停止されたノズルが設けられている散布ブームを上昇させる点に特徴がある。また、第2制御例は、薬剤の供給が停止されているノズル4に対して薬剤の供給が開始されると、薬剤の供給が開始されたノズル4が設けられている散布ブームを、当該散布ブームが上昇する前の高さまで下降させる。
【0057】
第2制御例を実行するにあたり、ステップS201において、制御装置9は、防除作業機1が薬剤を散布中である場合(ステップS201、Yes)、処理をステップS202へ進める。防除作業機1が薬剤を散布中でない場合(ステップS201、No)、制御装置9は、処理をSTARTに戻す。防除作業機1が薬剤を散布中であるか否かの判断は、第1制御例と同様である。ステップS202において、制御装置9は、図8に示す自動リフトスイッチ88がONである場合(ステップS202、Yes)、処理をステップS203に進め、自動リフトスイッチ88がOFFである場合(ステップS202、No)、処理をSTARTに戻す。
【0058】
ステップS203において、制御装置9は、図5に示す散布コック、より具体的には第1散布コック32Lと第2散布コック32Rとの少なくとも一方が閉じられている場合(ステップS203、Yes)、処理をステップS204に進め、第1散布コック32L及び第2散布コック32Rの両方が閉じられていない、すなわち開いた状態である場合(ステップS203、No)、処理をSTARTに戻す。
【0059】
ステップS204において、制御装置9は、散布コックが閉じられたノズル4、すなわち、薬剤の供給が停止されたノズル4が設けられている散布ブームを上昇させる。例えば、制御装置9は、第1散布コック32Lが閉じられた場合には第1散布ブーム5Lを上昇させ、第2散布コック32Rが閉じられた場合には第2散布ブーム5Rを上昇させる。防除作業機1の作業者が散布コックを閉じる操作は、作業者が薬剤の散布は不要であると判断して行われる操作である。このため、薬剤の散布が停止、すなわち、薬剤の供給が停止されたノズル4が設けられている散布ブームは、薬剤の散布時における高さに保持される必要はない。第2制御例は、薬剤の散布が停止された側の散布ブームを制御装置9が自動的に上昇させることにより、散布ブームが畦道AR又は隣接する圃場に侵入するおそれを低減できるので、安全性が向上する。また、薬剤の供給が停止された散布ブームが、防除作業機1の周辺に存在する建造物又は作物等と干渉するおそれを低減できるので、散布ブームが折損するおそれ及び作物の品質低下のおそれを最小限に抑えることができる。さらに、変形圃場での薬剤の散布作業において、操作に対する作業者の負荷を低減できる。
【0060】
次に、ステップS205に進み、制御装置9は、上昇させた散布ブームに設けられているノズル4に薬剤を供給する散布コックが再び開かれた場合(ステップS205、Yes)、処理をステップS206へ進め、前記散布コックが閉じられている場合(ステップS205、No)、処理をSTARTに戻す。閉じられた散布コックが再び開かれた場合、その散布コックから薬剤が供給されるノズル4から薬剤の散布を再開すると判断できる。このため、散布コックが再び開になった場合(ステップS205、Yes)、ステップS206において、制御装置9は、薬剤の供給が再開されたノズル4が設けられている散布ブームを下降させる。
【0061】
次に、ステップS207に進み、制御装置9は、下降させている散布ブームの高さが上昇前の高さになっていない場合(ステップS207、No)、下降させている散布ブームの高さが上昇前の高さになるまで、散布ブームを下降させる。下降させている散布ブームの高さが上昇前の高さになった場合(ステップS207、Yes)、制御装置9は、処理をSTARTに戻し、防除作業機1の旋回及び散布コックの状態を監視しながら、第2制御例を継続する。このようにすることで、作業者の操作に対する負荷を軽減できるとともに、薬剤の散布を再開するときには、上昇させていた散布ブームを確実かつ適正な位置に下降させて薬剤を散布することができるので、散布精度が向上する。
【0062】
図12は、本実施形態の変形例に係る表示・操作パネルの一例を示す図である。この表示・操作パネル11は、図8に示す自動リフトスイッチ88に加えて、自動水平スイッチ89を備える。自動水平スイッチ89は、防除作業機1が薬剤を散布しているときに、第1散布ブーム5Lと第2散布ブーム5Rと第3散布ブーム5Cとの水平を自動的に調整するためのスイッチである。自動水平スイッチ89がONになると、制御装置9は、リンク角速度センサ96及びリンク傾斜センサ97の検出値に基づいて水平バルブ14を動作させ、第1散布ブーム5Lと第2散布ブーム5Rと第3散布ブーム5Cとのうち、少なくとも薬剤を散布しているノズル4を有する散布ブームが水平になるように制御する。この制御を、散布ブーム自動水平制御という。
【0063】
本変形例において、制御装置9は、自動水平スイッチ89のONになり、散布ブーム自動水平制御が実行される状態となった場合には、第1制御例を実行する。すなわち、制御装置9は、自動リフトスイッチ88のON又はOFFに関わらず、旋回外側の散布コックが閉じられている場合には、旋回外側の散布ブームを上昇させる。このようにすることで、上述した第1制御例の作用、効果が得られる。また、本変形例において、制御装置9は、自動水平スイッチ89がONになり、散布ブーム自動水平制御が実行される状態となった場合には、第2制御例を実行する。すなわち、制御装置9は、散布ブーム自動水平制御が実行可能な状態に自動水平スイッチ89が切り替わっている場合、すなわち、自動水平スイッチ89がONになっている場合、ノズル4に対する薬剤の供給が停止されると、薬剤の供給が停止されたノズルが設けられている散布ブームを上昇させる。このようにすることで、上述した第2制御例の作用、効果が得られる。
【0064】
防除作業機1は、旋回中において、旋回内側の散布ブームの薬剤散布を継続することが多い。本変形例は、散布ブーム自動水平制御及び散布ブーム自動上昇制御の実行と非実行とを、自動水平スイッチ89でも切り替えることができるようにしている。このようにすると、自動水平スイッチ89がONになった場合には、旋回内側の散布ブームは自動的に水平に制御されるとともに、旋回外側の散布アームは自動的に上昇して、安全に防除作業機1が旋回できるという利点がある。本変形例においては、作業者が自動リフトスイッチ88の操作を忘れた場合であっても、自動水平スイッチ89がONになっていれば第1制御例及び第2制御例が実行されるという利点もある。このように、本変形例は、作業者が自動リフトスイッチ88の操作を忘れた場合であっても、自動水平スイッチ89がONになっていれば、薬剤の散布を継続しながら散布ブームを操作する作業者の負荷を軽減できるという利点がある。
【0065】
また、本変形例において、自動水平スイッチ89は、散布ブーム自動水平制御及び散布ブーム自動上昇制御の実行と非実行とを切り替えることができるようにしてもよい。すなわち、制御装置9は、自動水平スイッチ89がONになった場合、散布ブーム自動水平制御及び散布ブーム自動上昇制御の両方を実行し、自動水平スイッチ89がOFFになった場合、散布ブーム自動水平制御及び散布ブーム自動上昇制御の両方を実行しない。このようにすることで、簡単な操作で散布ブーム自動水平制御及び散布ブーム自動上昇制御の両方を実行できるので、作業者の操作を簡単にできるとともに、作業者は操作を理解しやすくなる。また、自動水平スイッチ89で散布ブーム自動水平制御及び散布ブーム自動上昇制御の実行と非実行とを切り替えるので、自動リフトスイッチ88は不要になる。その結果、表示・操作パネル11を構成する部品点数を削減し、製造コストを低減できる。
【0066】
(第3制御例)
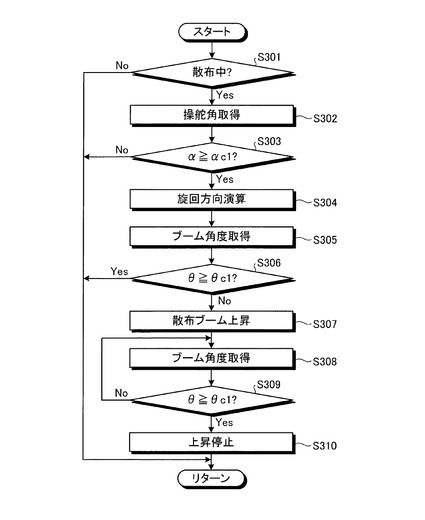
図13は、本実施形態に係る散布ブームの第3制御例を示すフローチャートである。第3制御例は、散布ブーム自動上昇制御を実行する際に、旋回外側の散布ブームが予め定めた所定の高さ(所定のブーム角度)以上である場合には、旋回外側の散布ブームを上昇させない点に特徴がある。第3制御例を実行するにあたって、ステップS301からステップS304は、第1制御例のステップS101からステップS104と同様なので、説明を省略する。ステップS305において、制御装置9は、旋回外側の散布ブームの角度(ブーム角度)θを、図2、図6に示すブーム角度右センサ98R又はブーム角度左センサ98Lから取得する。
【0067】
次に、ステップS306に進み、制御装置9は、ステップS305で取得したブーム角度θを、予め定めたブーム角度閾値(所定のブーム角度)θc1と比較する。ブーム角度閾値θc1は、例えば、45度以上の任意の値とすることができる。前記比較の結果、θ≧θc1である場合(ステップS306、Yes)、旋回外側の散布ブームは既に十分な高さまで上昇している。この場合、制御装置9は、旋回外側の散布ブームを上昇させず、処理をSTARTに戻し、防除作業機1の旋回及び散布コックの状態を監視しながら、第3制御例を継続する。
【0068】
前記比較の結果、θ<θc1である場合(ステップS306、No)、制御装置9は、ステップS307に進み、旋回外側の散布アームを上昇させる。次に、ステップS308において、制御装置9は、旋回外側の散布アームのブーム角度θを取得する。そして、ステップS309に進み、制御装置9は、ステップS308で取得したブーム角度θを、予め定めたブーム角度閾値(所定のブーム角度)θc1と比較する。前記比較の結果、θ<θc1である場合(ステップS308、No)、旋回外側の散布ブームは十分な高さまで上昇していないので、制御装置9は、θ≧θc1となるまでステップS308及びステップS309を繰り返す。前記比較の結果、θ≧θc1である場合(ステップS309、Yes)、旋回外側の散布ブームは既に十分な高さまで上昇している。この場合、ステップS310に進み、制御装置9は、旋回外側の散布ブームの上昇を停止した後、処理をSTARTに戻し、防除作業機1の旋回及び散布コックの状態を監視しながら、第3制御例を継続する。このようにすることで、第3制御例は、散布ブームを上昇させる場合において、旋回外側の散布アームの過剰な上昇を抑制できるので、防除作業機1の旋回が終了した後においては、上昇させた散布ブームを上昇前の高さまで下降させる時間を短縮できる。
【0069】
(第4制御例)
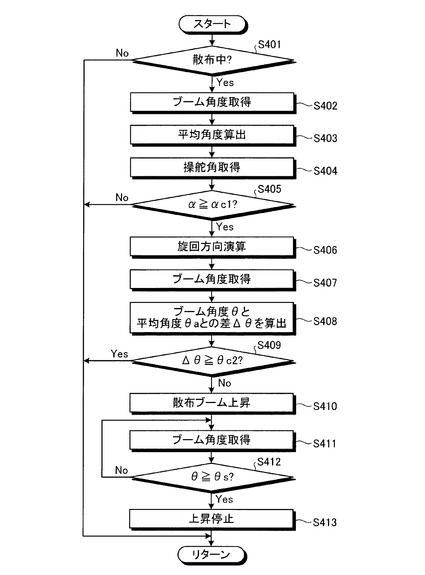
図14は、本実施形態に係る散布ブームの第4制御例を示すフローチャートである。第4制御例は、薬剤の散布中におけるブーム角度の平均値(平均角度)θaを求め、散布ブーム自動上昇制御を実行する際に、旋回開始時における旋回外側の散布ブームのブーム角度θとθaとの差が予め定めた所定の閾値(上昇開始角度閾値)以上である場合には、旋回外側の散布ブームを上昇させない点に特徴がある。第4制御例を実行するにあたって、ステップS401は、第1制御例のステップS101と同様なので、説明を省略する。ステップS402において、制御装置9は、散布ブーム、より具体的には、第1散布ブーム5L及び第2散布ブーム5Rのブーム角度θを、図2、図6に示すブーム角度右センサ98R及びブーム角度左センサ98Lから取得する。
【0070】
次に、ステップS403に進み、制御装置9は、取得したブーム角度θの平均角度θaを算出する。平均角度θaは、防除作業機1が薬剤を散布している間に取得した複数のブーム角度θの平均値である。平均角度θaは、第1散布ブーム5Lと第2散布ブーム5Rとでそれぞれ別個に求めてもよいし、第1散布ブーム5L及び第2散布ブーム5Rの平均値としてもよい。制御装置9は、算出した平均角度θaを記憶部41に保存する。
【0071】
次に、ステップS404に進むが、ステップS404からステップS406は、第1制御例のステップS102からステップS104と同様なので、説明を省略する。ステップS407において、制御装置9は、旋回外側の散布ブームのブーム角度θを取得する。次に、ステップS408に進み、制御装置9は、ステップS407で取得したブーム角度θと平均角度θaとの差Δθを算出する。平均角度θaが第1散布ブーム5Lと第2散布ブーム5Rとでそれぞれ別個に求められている場合、制御装置9は、旋回外側の散布ブームと同じ散布ブームの平均角度θaを記憶部41から読み出して、ブーム角度θと平均角度θaとの差Δθを算出する。平均角度θaが第1散布ブーム5L及び第2散布ブーム5Rの平均値である場合、平均角度θaは1つなので、制御装置9は、平均角度θaを記憶部41から読み出して、ブーム角度θと平均角度θaとの差Δθを算出する。
【0072】
次に、ステップS409に進み、制御装置9は、Δθと、予め定めた上昇開始角度閾値θc2とを比較する。前記比較の結果、Δθ≧θc2である場合(ステップS409、Yes)、旋回外側の散布ブームは既に十分な高さまで上昇している。この場合、制御装置9は、旋回外側の散布ブームを上昇させず、処理をSTARTに戻し、防除作業機1の旋回及び散布コックの状態を監視しながら、第4制御例を継続する。
【0073】
前記比較の結果、Δθ<θc2である場合(ステップS409、No)、旋回外側の散布ブームは十分な高さまで上昇していない。この場合、制御装置9は、ステップS410に進み、旋回外側の散布アームを上昇させる。次に、ステップS411において、制御装置9は、旋回外側の散布アームのブーム角度θを取得する。そして、ステップS411に進み、制御装置9は、ステップS410で取得したブーム角度θを、ブーム角度設定値θsと比較する。ブーム角度設定値θsは、例えば、θa+θc2とすることができる。
【0074】
前記比較の結果、θ<θsである場合(ステップS412、No)、旋回外側の散布ブームは十分な高さまで上昇していないので、制御装置9は、θ≧θsとなるまでステップS411及びステップS412を繰り返す。前記比較の結果、θ≧θsである場合(ステップS412、Yes)、旋回外側の散布ブームは既に十分な高さまで上昇している。この場合、ステップS413に進み、制御装置9は、旋回外側の散布ブームの上昇を停止した後、処理をSTARTに戻し、防除作業機1の旋回及び散布コックの状態を監視しながら、第4制御例を継続する。このようにすることで、第4制御例は、散布ブームを上昇させる場合において、旋回外側の散布アームの過剰な上昇を抑制できるので、防除作業機1の旋回が終了した後においては、上昇させた散布ブームを上昇前の高さまで下降させる時間を短縮できる。
【0075】
(第5制御例)
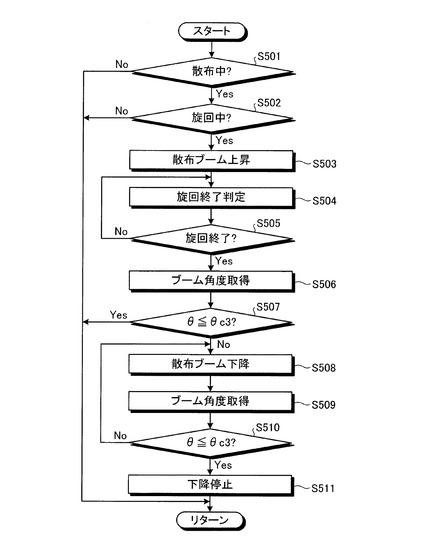
図15は、本実施形態に係る散布ブームの第5制御例を示すフローチャートである。第5制御例は、薬剤の散布中に旋回中の防除作業機1が旋回を終了するときにおいて、旋回外側の散布ブームのブーム角度θが、予め定めた所定の閾値(下降時閾値)θc3以下である場合には、旋回外側の散布ブームを下降させない点に特徴がある。第5制御例を実行するにあたって、ステップS501は、第1制御例のステップS101と同様なので、説明を省略する。ステップS502において、防除作業機1が旋回中でない場合(ステップS502、No)、制御装置9は、処理をSTARTに戻し、防除作業機1の旋回及び散布コックの状態を監視しながら、第5制御例を継続する。
【0076】
ステップS502において、防除作業機1が旋回中である場合(ステップS502、Yes)、ステップS503に進み、制御装置9は、旋回外側の散布ブームを上昇させる。次に、ステップS504に進み、制御装置9は、旋回終了判定を実行する。旋回終了判定は、例えば、防除作業機1の進行方向が略180度変更された場合又は上述した操舵角閾値αc1を一度検出された後に直進状態の操舵角が検出され、再び操舵角閾値αc1が検出された場合等に、防除作業機1の旋回は終了するとみなすものである。また、操舵角閾値αc1が一度検出された後に、操舵角αが直進状態の操舵角に変化する状態が検出された場合に、防除作業機1の旋回は終了するとみなしてもよい。
【0077】
次に、ステップS505に進み、制御装置9は、防除作業機1の旋回は終了すると判定した場合(ステップS505、Yes)、処理をステップS506に進め、防除作業機1の旋回は終了していないと判定した場合(ステップS505、No)、ステップS504及びステップS505を繰り返す。ステップS506において、制御装置9は、旋回外側の散布ブームのブーム角度θを取得する。次に、ステップS507に進み、制御装置9は、ステップS507で取得したブーム角度θと、下降時閾値θc3とを比較する。前記比較の結果、θ≦θc3である場合(ステップS507、Yes)、旋回外側の散布ブームは既に十分な高さまで下降している。この場合、制御装置9は、旋回外側の散布ブームを下降させず、処理をSTARTに戻し、防除作業機1の旋回及び散布コックの状態を監視しながら、第5制御例を継続する。
【0078】
前記比較の結果、θ>θc3である場合(ステップS507、No)、旋回外側の散布ブームは十分な高さまで下降していない。この場合、制御装置9は、ステップS508に進み、旋回外側の散布アームを下降させる。次に、ステップS509において、制御装置9は、旋回外側の散布アームのブーム角度θを取得する。そして、ステップS510に進み、制御装置9は、ステップS509で取得したブーム角度θを、下降時閾値θc3と比較する。
【0079】
前記比較の結果、θ>θc3である場合(ステップS510、No)、旋回外側の散布ブームは十分な高さまで下降していないので、制御装置9は、θ≦θc3となるまでステップS508からステップS509及びステップS510を繰り返す。前記比較の結果、θ≦θc3である場合(ステップS510、Yes)、旋回外側の散布ブームは既に十分な高さまで下降している。この場合、ステップS511に進み、制御装置9は、旋回外側の散布ブームの下降を停止した後、処理をSTARTに戻し、防除作業機1の旋回及び散布コックの状態を監視しながら、第5制御例を継続する。このようにすることで、第5制御例は、散布ブームを下降させる場合において、旋回外側の散布アームの不必要な下降を抑制できるので、防除作業機1の旋回が終了した後において、旋回外側の散布ブームを薬剤の散布が可能な位置へ迅速に配置することができる。
【0080】
また、第5制御例は、防除作業機1の旋回中に、作業者が旋回外側の散布ブームを下降させてθ≦θc3となった場合、作業者の操作を優先させることになるので、作業者の意図に沿った散布ブームの制御が実現できる。なお、第5制御例においては、防除作業機1の旋回中に、作業者が旋回外側の散布ブームを下降させた場合、旋回外側の散布ブームを自動的に下降させないようにして、作業者の操作を優先させるようにしてもよい。
【0081】
(第6制御例)
図16は、本実施形態に係る散布ブームの第6制御例を示すフローチャートである。第6制御例は、薬剤の散布中に旋回外側の散布ブームを上昇させた後、ブーム角度θが予め定めた所定の閾値(ブーム保持閾値)θc4以上である状態で防除作業機1が予め定めた所定の距離(ブーム高さ保持距離閾値)Dc以上走行した場合には、その後の旋回で散布ブームは下降させない点に特徴がある。第5制御例を実行するにあたって、ステップS601からステップS604は、第1制御例のステップS101からステップS104と同様なので、説明を省略する。ステップS605において、制御装置9は、旋回外側の散布ブームを上昇させる。次に、ステップS606へ進み、制御装置9は、図1、図6に示す車速センサ90から、防除作業機1の車速Vを取得する。防除作業機1が図6、図7に示すGPS受信部10を有するとき、制御装置9は、GPS受信部10が生成したGPS車速VgをGPS受信部10から取得し、これを防除作業機1の車速Vとしてもよい。
【0082】
制御装置9は、車速Vを取得したらステップS607に進み、防除作業機1の走行距離Dを求める。走行距離Dは、ステップS605において制御装置9が旋回外側の散布ブームを上昇させたときから防除作業機1が走行した距離である。薬剤の散布において、通常、防除作業機1の車速Vは一定であるので、制御装置9は、旋回外側の散布ブームを上昇させたときから、走行距離Dを求めるまでに経過した時間と、車速Vとの積により、走行距離Dを求めることができる。走行距離Dが求められたら、ステップS608へ進む。
【0083】
ステップS608において、制御装置9は、ステップS607で求めた走行距離Dとブーム高さ保持距離閾値Dcとを比較する。前記比較の結果、D≧Dcである場合(ステップS608、Yes)、制御装置9は、旋回外側の散布ブームを下降させず、処理をSTARTに戻し、防除作業機1の旋回及び散布コックの状態を監視しながら、第5制御例を継続する。このようにすることで、第6制御例は、防除作業機1が旋回した後、薬剤の散布中断又は薬剤の散布終了により防除作業機1が圃場FWから出た場合等に、散布ブームが下降して建造物又は隣接する圃場の作物等と干渉するおそれを低減することができる。
【0084】
前記比較の結果、D<Dcである場合(ステップS608、No)、制御装置9は、ステップS609に進み、旋回終了判定を実行する。旋回終了判定は、第5制御例で説明した通りである。次に、制御装置9は、ステップS610に処理を進め、防除作業機1の旋回は終了すると判定した場合(ステップS610、Yes)、処理をステップS611に進める。また、制御装置9は、防除作業機1の旋回は終了していないと判定した場合(ステップS610、No)、防除作業機1の旋回が終了するまでステップS606以降の処理を実行する。ステップS611において、制御装置9は、旋回外側の散布ブームを下降させた後、処理をSTARTに戻し、防除作業機1の旋回及び散布コックの状態を監視しながら、第6制御例を継続する。
【0085】
(第7制御例)
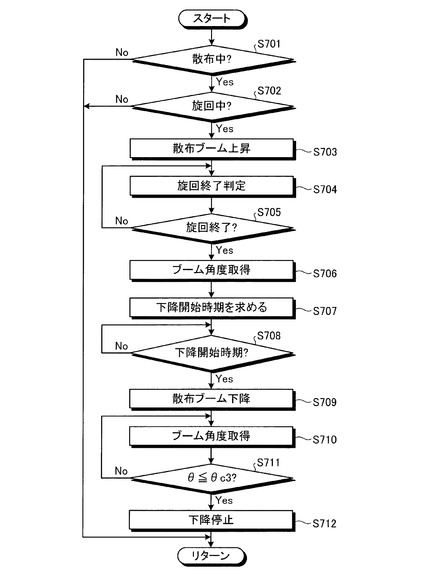
図17は、本実施形態に係る散布ブームの第7制御例を示すフローチャートである。第7制御例は、旋回中に薬剤を散布している防除作業機1が旋回を終了するときに旋回外側の散布ブームを下降させる場合において、旋回外側の散布ブームのブーム角度θに応じて旋回外側の散布ブームの下降を開始する時期を変更する点に特徴がある。第7制御例を実行するにあたって、ステップS701からステップS705は、第5制御例のステップS501からステップS505と同様なので、説明を省略する。ステップS706において、制御装置9は、旋回外側の散布ブームのブーム角度θを取得する。
【0086】
次に、ステップS707に進み、制御装置9は、旋回外側の散布ブームの下降を開始させる時期(下降開始時期)を求める。下降開始時期は、旋回外側の散布ブームのブーム角度θが大きいほど早くする。例えば、旋回外側の散布ブームのブーム角度がθ1で、防除作業機1が車速V1で走行している場合には、操舵角がα1まで戻されたときに旋回外側の散布ブームの下降を開始すれば、次の薬剤散布領域に進入したタイミングで薬剤の散布を開始できるとする。第7制御例においては、防除作業機1が車速V1で走行しており、かつ旋回外側の散布ブームのブーム角度がθ1よりも大きいθ2である場合、操舵角がα1よりも大きいα2まで戻されたときに、旋回外側の散布ブームの下降を開始する。すなわち、ブーム角度θが大きい場合は、ブーム角度θが小さいときよりも下降開始時期を早くする。このようにすることで、旋回が終了した後における薬剤の散布までに、旋回外側の散布ブームを適切な高さとして、次の薬剤散布領域に進入したタイミングで薬剤の散布を開始することができる。
【0087】
制御装置9は、下降開始時期を求めたらステップS708に処理を進める。ステップS708において、制御装置9は、下降開始時期になっていない場合(ステップS708、No)には下降開始時期になるまで待機し、下降開始時期になった場合(ステップS708、Yes)には処理をステップS709に進める。ステップS709からステップS712は、第5制御例のステップS508からステップS511と同様なので説明を省略する。
【0088】
上記説明においては、下降開始時期になったら旋回外側の散布ブームの下降を開始した例を示したが、第7制御例はこれに限定されるものではない。例えば、操舵角がα1まで戻されたときに旋回外側の散布ブームの下降を開始すれば、次の薬剤散布領域に進入したタイミングで薬剤の散布が開始できる位置まで散布ブームを下降させることができるブーム角度θ1よりも旋回外側の散布ブームのブーム角度が大きい場合、散布ブームの下降開始前に、ブーム角度をθ1としておいてもよい。このようにしても、回が終了した後における薬剤の散布までに、旋回外側の散布ブームを適切な高さとして、次の薬剤散布領域に進入したタイミングで薬剤の散布を開始することができる。また、旋回中において、旋回外側の散布ブームの高さを低くすることができる時間を長くすることができるので、旋回中における防除作業機1の重心が高くなることを抑制することができる。その結果、防除作業機1は、より安定して旋回することができる。
【0089】
(第8制御例)
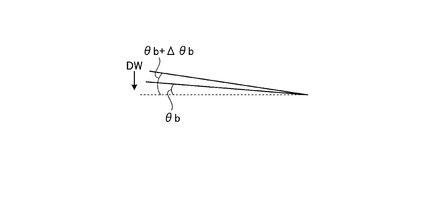
図18は、本実施形態に係る散布ブームの第8制御例を示すフローチャートである。図19は、本実施形態に係る散布ブームの第8制御例を示す図である。第8制御例は、旋回中に薬剤を散布している防除作業機1が旋回終了時に旋回外側の散布ブームを下降させる場合において、旋回外側の散布ブームのブーム角度が、散布ブームの上昇開始前におけるブーム角度(上昇前ブーム角度)θbよりも予め定めた設定角度Δθbだけ大きくなった時点で散布ブームの下降を停止する点に特徴がある。第8制御例を実行するにあたって、ステップS801からステップS805は、第3制御例のステップS301からステップS305と同様なので、説明を省略する。ステップS805において、制御装置9は、旋回外側の散布ブームのブーム角度θを取得する。
【0090】
ステップS805において、制御装置9は、旋回外側の散布ブームの角度(ブーム角度)θを取得したら、ステップS806に処理を進め、ステップS805で取得したブーム角度θを、上昇前ブーム角度θbとして記憶部41に保存する。次に、ステップS807に進み、制御装置9は、旋回外側の散布ブームを上昇させ、ステップS808へ進む。ステップS808において、制御装置9は、旋回終了判定を実行する。次に、ステップS809に進み、制御装置9は、防除作業機1の旋回は終了すると判定した場合(ステップS809、Yes)、処理をステップS810に進め、防除作業機1の旋回は終了していないと判定した場合(ステップS809、No)、ステップS808及びステップS809を繰り返す。
【0091】
ステップS810において、制御装置9は旋回外側の散布ブームを下降させ、ステップS811において、旋回外側の散布ブームのブーム角度θを取得する。図19の矢印DWで示す方向は、旋回外側の散布ブームが下降する方向である。次に、ステップS812に進み、制御装置9は、記憶部41に保存した上昇前ブーム角度θbを取得し、θb+Δθbと比較する。設定角度Δθbは、旋回外側の散布ブームの下がり過ぎを回避するためのものであり、この目的を達成できる範囲で適切な値が選択される。ステップS812において、θがθb+Δθbでない場合(ステップS812、No)、制御装置9は、θ=θb+ΔθbになるまでステップS810からステップS812を実行する。
【0092】
θ=θb+Δθbである場合(ステップS812、Yes)、制御装置9は、ステップS813に進み、旋回外側の散布ブームの下降を停止した後、処理をSTARTに戻し、防除作業機1の旋回及び散布コックの状態を監視しながら、第8制御例を継続する。このように、旋回外側の散布ブームを下降させる場合において、旋回外側の散布ブームのブーム角度が、上昇前ブーム角度θbよりも予め定めた設定角度Δθbだけ大きくなった時点で散布ブームの下降を停止することで、散布ブームの下がり過ぎを回避することができる。
【0093】
(第9制御例)
図20は、本実施形態に係る散布ブームの第9制御例で用いる自動リフトスイッチを示す図である。図21は、本実施形態に係る散布ブームの第9制御例を示すフローチャートである。第9制御例は、散布ブーム自動上昇制御の実行と非実行とを切り替えるとともに、散布ブームの上昇高さを設定できる自動リフトスイッチ88Aを用いた場合の制御例である。
【0094】
図20に示す自動リフトスイッチ88Aは、例えば、ロータリースイッチ又はボリューム等であり、OFFからONにすると散布ブーム自動上昇制御を非実行から実行に切り替えることができ、さらに、レベルの調整により、旋回外側の散布ブームの上昇高さ(角度)を設定することができる。第9制御例においては、自動リフトスイッチ88Aのレベルを示す数値が大きくなるにしたがって、旋回外側の散布ブームの上昇高さが大きくなる。自動リフトスイッチ88Aは、図8に示す表示・操作パネル11に設けられる。この自動リフトスイッチ88Aを用いた第9制御例を実行するにあたり、ステップS901において、制御装置9は、自動リフトスイッチ88Aの情報、すなわち、ONであるか、OFFであるか、ONである場合にはそのレベルを取得する。
【0095】
次に、制御装置9は、ステップS902へ処理を進め、自動リフトスイッチ88AがONでない場合(ステップS902、No)には、処理をSTARTに戻し、防除作業機1の旋回及び散布コックの状態を監視しながら、第8制御例を継続する。自動リフトスイッチ88AがONである場合(ステップS902、Yes)、ステップS903に進み、制御装置9は、自動リフトスイッチ88Aの設定値、すなわちレベルを取得する。そして、ステップS904に進み、制御装置9は、取得した設定値に基づいて旋回外側の散布ブームを上昇させる角度(上昇角度)を設定して、記憶部41に保存する。散布ブーム自動上昇制御が実行される場合、制御装置9は、記憶部41から上昇角度を取得し、旋回外側の散布ブームを上昇角度になるまで上昇させる。このように、散布ブーム自動上昇制御の実行と非実行とを切り替えるとともに、散布ブームの上昇高さを設定できる自動リフトスイッチ88Aを用いることにより、散布ブーム自動上昇制御の設定が容易になり、利便性が向上する。
【0096】
(第10制御例)
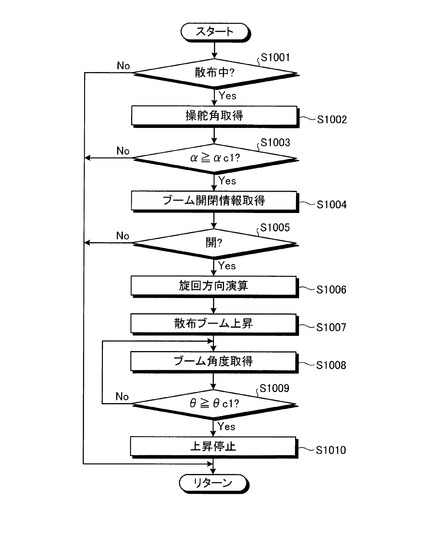
図22は、本実施形態に係る散布ブームの第10制御例を示すフローチャートである。第10制御例は、散布ブームが閉じている場合には、散布ブーム自動上昇制御を実行させない点に特徴がある。第10制御例を実行するにあたり、ステップS1001からステップS1003は、第1制御例のステップS101からステップS103と同様なので、説明を省略する。
【0097】
ステップS1004において、制御装置9は、図2、図6に示す右開閉アクチュエータ13R及び左開閉アクチュエータ13Lから第1散布ブーム5L及び第2散布ブーム5Rが開いているか又は閉じているかについての情報(ブーム開閉情報)を取得する。次に、ステップS1005に進み、第1散布ブーム5L及び第2散布ブーム5Rが開いていない、すなわち閉じている場合(ステップS1005、No)、制御装置9は、散布ブーム自動上昇制御を実行せず、処理をSTARTに戻し、防除作業機1の旋回及び散布コックの状態を監視しながら、第8制御例を継続する。
【0098】
第1散布ブーム5L及び第2散布ブーム5Rが開いている場合(ステップS1005、Yes)、制御装置9は、処理をステップS1006に進める。ステップS1006において、制御装置9は、防除作業機1の旋回方向を演算し、ステップS1007に進む。ステップS1007からステップS1010は、第3制御例のステップS307からステップS310と同様なので、説明を省略する。
【0099】
第10制御例は、散布ブームが閉じている場合には、散布ブーム自動上昇制御を実行させないので、第1散布ブーム5L及び第2散布ブーム5Rが閉じている場合、これらは閉じた状態のまま維持されて、上昇又は下降しない。このようにすることで、第1散布ブーム5L及び第2散布ブーム5Rが閉じた状態において、これらの昇降動作が規制されるので、例えば、防除作業機1が路上を走行していたり、格納庫内を走行していたりした場合に、第1散布ブーム5L及び第2散布ブーム5Rの上昇又は下降を回避して、安全性を向上させることができる。
【符号の説明】
【0100】
1 防除作業機
1B 車体
2 内燃機関
3FL、3FR 前輪
3RL、3RR 後輪
4 ノズル
5L 第1散布ブーム
5R 第2散布ブーム
5C 第3散布ブーム
6 運転席
7 ハンドル
8 薬剤供給系統
9 制御装置
10 GPS受信部
11 表示・操作パネル
12L 左上下アクチュエータ
12R 右上下アクチュエータ
13L 左開閉アクチュエータ
13R 右開閉アクチュエータ
14 水平バルブ
15L 左伸縮アクチュエータ
15R 右伸縮アクチュエータ
20 タンク
27 ポンプ
30 分岐装置
32L 第1散布コック
32R 第2散布コック
32C 第3散布コック
40 制御用プロセッサ
41 記憶部
42a〜42q 入力インターフェース
43 入出力インターフェース
44a〜44m 出力インターフェース
81 ポンプスイッチ
88、88A 自動リフトスイッチ
88L 第1自動リフトスイッチ
88R 第2自動リフトスイッチ
89 自動水平スイッチ
90 車速センサ
91 操舵角センサ
95 ブームストロークセンサ
96 リンク角速度センサ
97 リンク傾斜センサ
98L ブーム角度左センサ
98R ブーム角度右センサ
99L ブーム開閉左センサ
99R ブーム開閉右センサ
【技術分野】
【0001】
本発明は、圃場に薬剤を散布する防除作業機に関する。
【背景技術】
【0002】
防除作業機は、圃場に農薬や肥料を散布する機械である。例えば、特許文献1には、左右方向に伸延させて昇降手段により略水平に昇降自在となしたセンターブームと、同センターブームの左右側端部に取り付けて、起倒手段により起倒自在となしたサイドブームと、これらのブームに取り付けた複数の薬液散布用のノズルとを具備し、サイドブームは、略水平に倒伏させて薬液を散布する使用位置と、後上方へ傾斜状に跳ね上げた収納位置との間で位置変更自在となしたブームスプレーヤ(防除装置)において、サイドブームは、略垂直面内で起倒自在となして、同略垂直面内にて使用位置を変更可能としたブームスプレーヤが記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2004−275930号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載された技術は、サイドブーム(散布ブーム)の使用位置を変更する操作をする際に、作業者の負担が大きくなるおそれがある。特に、防除作業機が旋回しているときには、作業者は防除作業機が作物を踏まないように旋回操作に集中する必要があるので、散布ブームの操作に対する作業者の負担をできる限り低減することが望まれている。
【0005】
本発明は、防除作業機が圃場で薬剤を散布しながら旋回しているときにおいて、防除作業機の散布ブームの操作に対する作業者の負担を低減することを目的とする。
【課題を解決するための手段】
【0006】
本発明は、操舵輪(3FL、3FR)と駆動輪(3FL、3FR、3RL、3RR)とを有する車体(1B)と、圃場(FW)に薬剤を散布する複数のノズル(4)が取り付けられるとともに、前記車体(1B)の前後方向に対して両側にそれぞれ設けられる一対の散布ブーム(5L、5R)と、前記操舵輪(3RL、3RR)が所定角度以上操舵されているときに、前記車体(1B)の旋回方向外側に配置されている散布ブーム(5L、5R)を上昇させる散布ブーム自動上昇制御の実行と非実行とを切り替える自動リフトスイッチ(88;88A)と、前記自動リフトスイッチ(88;88A)が前記散布ブーム自動上昇制御を非実行としている場合において、旋回外側の前記散布ブーム(5L、5R)に設けられた前記ノズル(4)に対する前記薬剤の供給が停止されたときには、旋回外側の前記散布ブーム(5L、5R)を上昇させる散布制御装置(9)と、を含むことを特徴とする防除作業機(1)である。
【0007】
本発明において、前記散布制御装置(9)は、旋回外側の前記散布ブーム(5L、5R)の前記ノズル(4)に前記薬剤の供給が開始されると、旋回外側の前記散布ブーム(5L、5R)を下降させることが好ましい。
【0008】
本発明において、前記散布制御装置(9)は、前記散布ブーム自動上昇制御を実行可能な状態に前記自動リフトスイッチ(88;88A)が切り替わっている場合に前記ノズル(4)に対する前記薬剤の供給が停止されると、前記薬剤の供給が停止されたノズル(4)が設けられている前記散布ブーム(5L、5R)を上昇させることが好ましい。
【0009】
本発明において、前記散布制御装置(9)は、前記ノズル(4)に対する前記薬剤の供給が開始されると、前記薬剤の供給が開始された前記ノズル(4)が設けられている前記散布ブーム(5L、5R)を、当該散布ブームが上昇する前の高さまで下降させることが好ましい。
【発明の効果】
【0010】
本発明は、防除作業機が圃場で薬剤を散布しながら旋回しているときにおいて、防除作業機の散布ブームの操作に対する作業者の負担を低減することができる。
【図面の簡単な説明】
【0011】
【図1】図1は、本実施形態に係る防除作業機の側面図である。
【図2】図2は、本実施形態に係る防除作業機の平面図である。
【図3】図3は、防除作業機が薬剤を散布する際の姿勢を示す正面図である。
【図4】図4は、防除作業機が薬剤を散布する際の姿勢を示す正面図である。
【図5】図5は、本実施形態に係る防除作業機が有する薬剤供給系統の一例を示す構成図である。
【図6】図6は、本実施形態に係る防除作業機が有する制御装置の構成例を示す模式図である。
【図7】図7は、本実施形態に係る防除作業機が有するGPS受信部の構成例を示す模式図である。
【図8】図8は、本実施形態に係る防除作業機が有する操作パネルの一例を示す模式図である。
【図9】図9は、本実施形態に係る防除作業機が圃場で薬剤を散布する際に旋回しているときの状態を示す模式図である。
【図10】図10は、本実施形態に係る散布ブームの第1制御例を示すフローチャートである。
【図11】図11は、本実施形態に係る散布ブームの第2制御例を示すフローチャートである。
【図12】図12は、本実施形態の変形例に係る表示・操作パネルの一例を示す図である。
【図13】図13は、本実施形態に係る散布ブームの第3制御例を示すフローチャートである。
【図14】図14は、本実施形態に係る散布ブームの第4制御例を示すフローチャートである。
【図15】図15は、本実施形態に係る散布ブームの第5制御例を示すフローチャートである。
【図16】図16は、本実施形態に係る散布ブームの第6制御例を示すフローチャートである。
【図17】図17は、本実施形態に係る散布ブームの第7制御例を示すフローチャートである。
【図18】図18は、本実施形態に係る散布ブームの第8制御例を示すフローチャートである。
【図19】図19は、本実施形態に係る散布ブームの第9制御例を示す図である。
【図20】図20は、本実施形態に係る散布ブームの第8制御例で用いる自動リフトスイッチを示す図である。
【図21】図21は、本実施形態に係る散布ブームの第9制御例を示すフローチャートである。
【図22】図22は、本実施形態に係る散布ブームの第10制御例を示すフローチャートである。
【発明を実施するための形態】
【0012】
本発明を実施するための形態(実施形態)につき、図面を参照しつつ詳細に説明する。以下の実施形態に記載した内容により本発明が限定されるものではない。また、以下に記載した構成要素には、当業者が容易に想定できるもの、実質的に同一のものが含まれる。さらに、以下に記載した構成要素は適宜組み合わせることが可能である。また、本発明の要旨を逸脱しない範囲で構成要素の種々の省略、置換又は変更を行うことができる。以下において、薬剤とは、肥料、農薬等を溶媒(例えば、水)に溶解させた液体及び肥料、農薬等の固形分を含む液体(例えば、水)等の液状物をいう。
【0013】
図1は、本実施形態に係る防除作業機の側面図である。図2は、本実施形態に係る防除作業機の平面図である。防除作業機1は、動力発生源が発生する動力によって走行して、薬剤を圃場に散布する作業用車両である。防除作業機1は、車体1Bと、車体1Bに搭載された動力発生源としての内燃機関(例えば、ディーゼルエンジン又はガソリンエンジン)2と、動力発生源が発生した動力を地面Gに伝えて防除作業機1を走行させる前輪3FL、3FR及び後輪3RL、3RRと、を含む。内燃機関2の出力は、油圧ポンプ2Pに入力される。油圧ポンプ2Pは、内燃機関2によって駆動されて、油圧機器を駆動するための作動油を吐出する。
【0014】
前輪3FL、3FR及び後輪3RL、3RRは、車体1Bに取り付けられて、これを支持している。前輪3FL、3FR及び後輪3RL、3RRには、それぞれ油圧モータ3Mが取り付けられている。また、後述するように、前輪3FL、3FRは防除作業機1の操舵輪である。このように、車体1Bは、操舵輪と駆動輪とを有する。油圧モータ3Mは、油圧ポンプ2Pから吐出された作動油によって回転し、前輪3FL、3FR及び後輪3RL、3RRを回転させる。このような構造によって、内燃機関2の動力が地面Gに伝えられて、防除作業機1を走行させる。なお、図1は、前輪3FL及び後輪3RLに油圧モータ3Mが取り付けられている状態を示しているが、前輪3FR及び後輪3RRについても同様に油圧モータ3Mが取り付けられている。
【0015】
本実施形態において、防除作業機1は、内燃機関2の動力を油圧ポンプ2P及び油圧モータ3Mを介して前輪3FL、3FR及び後輪3RL、3RRに伝達するが、内燃機関2の動力を、トランスミッションを介して前輪3FL、3FR及び後輪3RL、3RRに伝達してもよい。この場合、内燃機関2とトランスミッションとの間に油圧式無段変速装置(HST:Hydro Static Transmission)を設け、内燃機関2からの動力を油圧式無段変速装置(HST)の可変油圧ポンプに入力し、油圧式無段変速装置(HST)の定量油圧モータから出力した動力をトランスミッションに入力し、トランスミッション内の副変速装置を介して前輪3FL、3FR及び後輪3RL、3RRに動力伝達するようにしてもよい。
【0016】
防除作業機1は、薬剤を散布するための複数のノズル4と、複数のノズル4が取り付けられてこれらを支持する散布ブームとしての第1散布ブーム5L、第2散布ブーム5R及び第3散布ブーム5Cとを有する。第1散布ブーム5Lは、防除作業機1の前後方向の左側に配置され、第2散布ブーム5Rは、防除作業機1の前後方向の右側に配置される。防除作業機1の前後方向とは、防除作業機1の車体1Bに搭載される運転席6からハンドル7に向かう方向と平行な方向である。このように、第1散布ブーム5Lと第2散布ブーム5Rとは、防除作業機1の車体1Bの前後方向に対してそれぞれ両側に設けられる一対の散布ブームである。
【0017】
第3散布ブーム5Cは、防除作業機1の進行方向側かつ第1散布ブーム5Lと第2散布ブーム5Rとの間に配置される。防除作業機1の進行方向とは、防除作業機1の車体1Bに搭載される運転席6からハンドル7に向かう方向である。第1散布ブーム5Lと、第2散布ブーム5Rと、第3散布ブーム5Cとは、それぞれ複数のノズル4を有している。本実施形態において、複数のノズル4は、薬剤を散布するための噴射口が地面Gを向いているが、前記噴射口の向きはこれに限定されるものではなく、薬剤の散布対象に応じて適宜変更できる。
【0018】
第1散布ブーム5Lは、防除作業機1に旋回可能に取り付けられる旋回散布ブーム5BLと、旋回散布ブーム5BLに伸縮自在に支持される延長散布ブーム5SLとを有する。第2散布ブーム5Rも、第1散布ブーム5Lと同様に、防除作業機1に旋回可能に取り付けられる旋回散布ブーム5BRと、旋回散布ブーム5BRに伸縮自在に支持される延長散布ブーム5SRとを有する。図2に示すように、第1散布ブーム5L及び第2散布ブーム5Rは、圃場で薬剤を散布しないときには防除作業機1の車体1Bの前後方向に対して両側に折り畳まれている。
【0019】
薬剤の散布時において、第1散布ブーム5L及び第2散布ブーム5Rは、いずれも防除作業機1の進行方向側、すなわち前方に向かって、第3散布ブーム5Cと略平行になる位置まで旋回する(図2の矢印Rで示す方向)。図2においては、第1散布ブーム5L及び第2散布ブーム5Rは、図2の矢印Rで示す方向に旋回する。この位置で、第1散布ブーム5L及び第2散布ブーム5Rは防除作業機1に固定される。すると、第1散布ブーム5Lと第2散布ブーム5Rと第3散布ブーム5Cとは、略一直線上に配置されるので、これらに取り付けられた複数のノズル4も、略一直線上に配列される。
【0020】
また、防除作業機1は、第1散布ブーム5L又は第2散布ブーム5Rと、基準面(例えば、前輪3FL、3FR及び後輪3RL、3RRの車軸を含む平面又は水平面)とのなす角度を、それぞれ独立に変更することができる。防除作業機1は、第1散布ブーム5L又は第2散布ブーム5Rと基準面との角度を変更することにより、圃場と第1散布ブーム5L又は第2散布ブーム5Rとの距離を変更することができるので、圃場の作物と第1散布ブーム5L又は第2散布ブーム5Rとの距離も変更することができる。
【0021】
防除作業機1は、車体1Bの進行方向側かつ前後方向に対して両側に、それぞれ第1散布ブーム高さ調整装置としての左上下アクチュエータ12Lと、第2散布ブーム高さ調整装置としての右上下アクチュエータ12Rとを搭載している。また、防除作業機1は、車体1Bの進行方向側かつ前後方向に対して両側に、第1散布ブーム開閉装置としての左開閉アクチュエータ13Lと、第2散布ブーム開閉装置としての右開閉アクチュエータ13Rとを搭載している。左上下アクチュエータ12L、右上下アクチュエータ12R、左開閉アクチュエータ13L及び右開閉アクチュエータ13Rは、例えば、油圧シリンダ又はエアシリンダ等である。
【0022】
防除作業機1は、車体1Bの進行方向側に、水平バルブ14を搭載している。水平バルブ14は、第1散布ブーム5L、第2散布ブーム5R及び第3散布ブーム5Cと車体1Bの所定平面(例えば、前輪3FL、3FR及び後輪3RL、3RRの車軸を含む平面)とのなす角度を変更する装置である。例えば、防除作業機1が圃場で防除作業をしているときに、圃場の作付面(圃場において作物が作付けされている部分の表面)に対して防除作業機1が傾斜したような場合、第1散布ブーム5L、第2散布ブーム5R及び第3散布ブーム5Cが圃場に対して傾斜することがある。この場合、水平バルブ14は、第1散布ブーム5L、第2散布ブーム5R及び第3散布ブーム5Cと車体1Bの所定平面とのなす角度を変更して、第1散布ブーム5L、第2散布ブーム5R及び第3散布ブーム5Cと作付面とが平行になるようにする。このようにすることで、防除作業機1が作付面に対して傾斜しても、作物とノズル4との距離を略一定に保持することができる。
【0023】
防除作業機1は、車体1Bの進行方向側に、ブームストロークセンサ95と、リンク角速度センサ96と、リンク傾斜センサ97とを搭載している。また、防除作業機1は、車体1Bの進行方向側かつ前後方向に対して両側に、ブーム角度右センサ98Rとブーム角度左センサ98Lとを搭載し、また、ブーム開閉右センサ99Rとブーム開閉左センサ99Lとを搭載する。ブームストロークセンサ95は、第1散布ブーム5L及び第2散布ブーム5Rの長さを検出する。リンク角速度センサ96は、第1散布ブーム5L、第2散布ブーム5R及び第3散布ブーム5Cを車体1Bに取り付けるリンクの角速度を検出する。リンク傾斜センサ97は、第1散布ブーム5L、第2散布ブーム5R及び第3散布ブーム5Cを車体1Bに取り付けるリンクの水平面に対する傾斜を検出する。ブーム角度右センサ98Rは、第2散布ブーム5Rの前記基準面に対する傾斜角度を検出し、ブーム角度左センサ98Lは、第1散布ブーム5Lの前記基準面に対する傾斜角度を検出する。ブーム開閉右センサ99Rは、第2散布ブーム5Rが閉じているか又は開いているかを検出し、ブーム開閉左センサ99Lは、第1散布ブーム5Lが閉じているか又は開いているかを検出する。ブームストロークセンサ95、リンク角速度センサ96、リンク傾斜センサ97、ブーム角度右センサ98R、ブーム角度左センサ98L、ブーム開閉右センサ99R及びブーム開閉左センサ99Lは、後述する制御装置9と電気的に接続されている。制御装置9は、これらのセンサが検出した値を取得して、防除作業機1の制御に用いる。
【0024】
防除作業機1は、制御装置9と、GPS受信部10と、表示・操作パネル11と、防除作業機1が走行する速度を検出する速度検出手段としての車速センサ90と、操舵輪の操舵角度を検出する操舵角検出手段としての操舵角センサ91とを有する。制御装置9は、防除作業機1の制御、例えば、GPS受信部10から得られる情報に基づいて防除作業機1が圃場の薬剤を散布する領域へ進入際の進入位置を求めたり、ノズル4から散布される薬剤の供給量を制御したり、内燃機関2を制御したりする。GPS受信部10は、GPS衛星から送信される電波を受信する。表示・操作パネル11は、作業者からの入力を受け付けたり、防除作業機1の運転条件を表示したり、防除作業機1の状態を表示したりする。制御装置9、GPS受信部10及び表示・操作パネル11については後述する。車速センサ90は、例えば、前輪3FL、3FR、後輪3RL、3RRの回転速度から又はトランスミッション内の歯車の回転から、防除作業機1の速度(車速)を検出する。操舵角センサ91は、ハンドル7の回転角度から、前輪3FL、3FRの操舵角を検出する。すなわち、防除作業機1は、前輪3FL、3FRが操舵輪となる。
【0025】
図3、図4は、防除作業機が薬剤を散布する際の姿勢を示す正面図である。図3は、図2に示す旋回散布ブーム5BL、5BRから延長散布ブーム5SL、5SRが伸びていない状態を示している。図4は、旋回散布ブーム5BL、5BRから延長散布ブーム5SL、5SRが伸びている状態を示している。いずれの状態においても、地面G上の防除作業機1は、第1散布ブーム5Lと第2散布ブーム5Rと第3散布ブーム5Cとが略一直線上に配置された状態で、複数のノズル4から薬剤を散布する。すなわち、防除作業機1は、第1散布ブーム5Lと第2散布ブーム5Rとを左右に開いた状態で複数のノズル4から薬剤を散布する。なお、防除作業機1は、車体1Bの前後方向両側にそれぞれ設けられた第1散布ブーム5Lと第2散布ブーム5Rとが、車体1Bに収納された状態と左右に開いた状態との間に存在する状態においても、複数のノズル4から薬剤を散布することができる。
【0026】
図4に示すように、旋回散布ブーム5BL、5BRからそれぞれ延長散布ブーム5SL、5SRが伸びると、第1散布ブーム5Lの先端と第2散布ブーム5Rの先端との距離は、延長散布ブーム5SL、5SRが伸びない場合よりも大きくなる。第1散布ブーム5Lの付け根(第3散布ブーム5Cとの接続部)と先端との距離及び第2散布ブーム5Rの付け根(第3散布ブーム5Cとの接続部)と先端との距離は、ブームストロークセンサ95が検出する。
【0027】
本実施形態において、旋回散布ブーム5BL、5BRから延長散布ブーム5SL、5SRが伸びる距離は、無段階又は段階的に調整することができるよう構成されるとともに、旋回散布ブーム5BL、5BRと延長散布ブーム5SL、5SRとが重複する個所の旋回散布ブーム5BL、5BR側に存在するノズルへの薬剤の供給を遮断できるよう構成されている。このような構成としては、例えば、旋回散布ブーム5BL、5BRの各ノズルに切替コックを備え、前記切替コックの開閉切替を作動させる切替部材を機外に配置するとともに、延長散布ブーム5SL、5SR側に作動片を設ける。このような構成として、延長散布ブーム5SL、5SRが往・復する際に前記切替コックへ接当させることによって、コック切替をすることができる。このような構造により、防除作業機1は、圃場における薬剤の散布領域に応じて、薬剤を散布する幅(散布幅)を変更することができる。また、防除作業機1は、複数のノズル4から薬剤を散布するノズルを選択して薬剤を散布することができる。このように、防除作業機1は、薬剤の散布幅と薬剤を散布するノズルの数及び位置とを変更することによって、薬剤の様々な散布条件に対応することができる。次に、薬剤供給系統8について説明する。
【0028】
図5は、本実施形態に係る防除作業機が有する薬剤供給系統の一例を示す構成図である。防除作業機1は、薬剤供給系統8を有している。薬剤供給系統8は、複数のノズル4に薬剤を供給するシステムである。薬剤供給系統8は、タンク20と、給水ホース21と、吐水ホース22と、散布ホース23と、撹拌ホース24と、余水ホース25と、給水コック26と、ポンプ27と、フィルタ28と、流量制御弁29と、分岐装置30と、安全弁31と、圧力センサ92と、流量センサ93と、弁開度センサ94とを含む。以下において、「水」は、薬剤を含むものとする。タンク20は、ノズル4が散布する薬液を蓄える。給水ホース21は、タンク20からフィルタ28を介して、ポンプ27までタンク20内の薬剤を導くための配管である。吐水ホース22は、ポンプ27から分岐装置30まで薬剤を導くための配管である。散布ホース23は、分岐装置30から第1散布ブーム5L及び第2散布ブーム5R及び第3散布ブーム5Cまで薬剤を導くための配管である。第1散布ブーム5Lの延長散布ブーム5SL及び第2散布ブーム5Rの延長散布ブーム5SRに取り付けられた複数のノズル4へ薬剤を導くための散布ホース23は、それぞれフレキシブルホース23EL、23ERを有している。このような構造により、フレキシブルホース23EL、23ERは、延長散布ブーム5SL、5SRが伸縮しても、その動きを許容する。撹拌ホース24は、タンク20内の薬液を撹拌するために、常時所定の流量の薬剤をタンク20内に流すための配管である。撹拌ホース24は、吐水ホース22から分岐してタンク20に接続されている。余水ホース25は、散布及び撹拌に使用しなかった薬剤をタンク20内に戻すための配管である。
【0029】
給水コック26は、タンク20とフィルタ28との間に設けられて、フィルタ28の交換、掃除等を行うときにタンク20からの給水を止めるときに使用する。フィルタ28は、タンク20内の薬剤からごみ等を除去する。ポンプ27は、フィルタ28を通過した薬剤を吸引した後に加圧して、吐水ホース22を介して流量制御弁29に向かって吐出する。流量制御弁29は、分岐装置30へ流す薬剤の流量を調整する装置であって、図1、図2に示す制御装置9によって制御される。分岐装置30は、流量制御弁29から送られてきた薬剤を3本の散布ホース23に分岐させて、第1散布ブーム5Lと第2散布ブーム5Rと第3散布ブーム5Cとがそれぞれ有する複数のノズル4へ薬剤を供給する。
【0030】
分岐装置30の出口側には、第1散布コック32Lと第2散布コック32Rと第3散布コック32Cとが設けられている。第1散布コック32Lは、分岐装置30と第1散布ブーム5Lのノズル4との間に配置されており、分岐装置30から第1散布ブーム5Lのノズル4に対する薬剤の供給と非供給とを切り替える。第2散布コック32Rは、分岐装置30と第2散布ブーム5Rのノズル4との間に配置されており、分岐装置30から第2散布ブーム5Rのノズル4に対する薬剤の供給と非供給とを切り替える。第3散布コック32Cは、分岐装置30と第3散布ブーム5Cのノズル4との間に配置されており、分岐装置30から第3散布ブーム5Cのノズル4に対する薬剤の供給と非供給とを切り替える。第1散布コック32L、第2散布コック32R及び第3散布コック32Cは、直接作業者がこれらを開閉する方式であってもよいし、アクチュエータがこれらを開閉する方式であってもよい。第1散布コック32L、第2散布コック32R及び第3散布コック32Cには、これらの状態(閉じているか、開いているか)を検出するための開閉センサが取り付けられており、制御装置9は、前記開閉センサの出力を取得して、第1散布コック32L、第2散布コック32R及び第3散布コック32Cの状態を把握する。安全弁31は、吐水ホース22内の薬剤の圧力が過度に上昇した場合に、薬剤をタンク20に戻して吐水ホース22内の薬剤の圧力上昇を抑制するための装置である。
【0031】
流量センサ93は、流量制御弁29と分岐装置30との間に設けられている。流量センサ93は、分岐装置30へ流入する薬剤の流量、すなわち、ノズル4から散布される薬剤の流量を検出して、図1、図2に示す制御装置9に送信する。圧力センサ92は、分岐装置30に設けられている。圧力センサ92は、散布ホース23へ送られる薬剤の圧力を検出し、図1、図2に示す制御装置9に送信する。弁開度センサ94は、流量制御弁29に設けられている。弁開度センサ94は、流量制御弁29の開度を検出して、図1、図2に示す制御装置9に送信する。制御装置9は、圧力センサ92、流量センサ93及び弁開度センサ94が検出した情報に基づき、ポンプ27及び流量制御弁29を制御して、散布される薬剤の流量を調整する。次に、制御装置9について説明する。
【0032】
図6は、本実施形態に係る防除作業機が有する制御装置の構成例を示す模式図である。制御装置9は、制御用プロセッサ40と、記憶部41と、入力インターフェース42a〜42qと、入出力インターフェース43と、出力インターフェース44a〜44mとを含む。制御用プロセッサ40は、コンピュータにおいてソフトウェアを動作させる演算装置(ハードウェア)であり、コンピュータプログラムの命令を解釈し実行する機能を有する。制御用プロセッサ40は、防除作業機1が有する内燃機関2及び薬剤供給系統8等を制御するためのコンピュータプログラムの命令を解釈し実行することにより、防除作業機1全体を制御する。この他にも、制御用プロセッサ40は、第1散布ブーム5L及び第2散布ブーム5Rの昇降及び開閉を制御したり、第1散布ブーム5L、第2散布ブーム5R及び第3散布ブーム5Cの傾斜を制御したりする散布制御装置としても機能する。この場合、制御用プロセッサ40は、第1散布ブーム5L、第2散布ブーム5R及び第3散布ブーム5Cの動作の制御を実現するための命令が記述されたコンピュータプログラムの命令を解釈し実行することにより、散布制御装置として機能する。
【0033】
記憶部41は、RAM(Random Access Memory)41Aと、ROM(Read Only Memory)41Bと、EEPROM(Electrically Erasable Programmable Read Only Memory)41Cとを含む。RAM41Aは、電源の供給が絶たれると記憶内容が失われる揮発性メモリであり、ROM41B及びEEPROM41Cは、電源を供給しなくとも記憶内容を保持する不揮発性メモリである。EEPROM41Cは、記憶内容を電気的に消去できるとともに、新たな情報を記憶することができる。記憶部41は、防除作業機1の制御を実現するためのコンピュータプログラム及びデータ並びに散布制御装置としての機能を実現するためのコンピュータプログラム及びデータ等を記憶する。本実施形態において、ROM41Bはコンピュータプログラム等を記憶し、EEPROM41Cは制御装置9の動作中に得られたデータ等を記憶する。RAM41Aは、制御装置9の動作中において、ROM41Bに記憶されたコンピュータプログラムを展開する。
【0034】
入力インターフェース42a〜42qは、それぞれ、自動リフトスイッチ88、操舵角センサ91、ポンプスイッチ81、車速センサ90、圧力センサ92、流量センサ93、弁開度センサ94、設定スイッチ82、ブームストロークセンサ95、リンク角速度センサ96、リンク傾斜センサ97、ブーム角度右センサ98R、ブーム角度左センサ98L、ブーム開閉右センサ99R、ブーム開閉左センサ99Lが接続される。入力インターフェース42a〜42qは、自身に入力される情報を、制御用プロセッサ40が利用できる形に変換して制御用プロセッサ40へ入力する。入出力インターフェース43は、GPS受信部10の送受信回路56が接続される。後述するように、GPS受信部10は、GPS車速Vgを生成する。送受信回路56は、GPS車速Vgを入出力インターフェース43に送信し、また、制御用プロセッサ40からの命令を、入出力インターフェース43を介して受信する。入出力インターフェース43は、GPS受信部10と制御用プロセッサ40との間に介在し、両者の間で情報のやりとりができるようにする。
【0035】
出力インターフェース44a、44c〜44mは、それぞれ、流量制御モータ29M、ポンプ27、ブザー83、表示部11D、水平バルブ14、右上下アクチュエータ12R、左上下アクチュエータ12L、右開閉アクチュエータ13R、左開閉アクチュエータ13L、右伸縮アクチュエータ15R、左伸縮アクチュエータ15Lに接続される。流量制御モータ29Mは、図5に示す流量制御弁29の弁開度を調整するための装置である。出力インターフェース44bは、制御用プロセッサ40が生成した、流量制御モータ29Mの回転方向を切り替えるための情報を、モータ回転方向切替出力RDに変換して出力する。流量制御モータ29Mは、モータ回転方向切替出力RDによって回転方向が切り替えられる。出力インターフェース44a〜44mは、制御用プロセッサ40が生成した流量制御モータ29M、ポンプ27、右上下アクチュエータ12R及び左上下アクチュエータ12L等を制御するための命令を、これらの機器が利用できる形に変換して出力する。
【0036】
防除作業機1は、車速に連動させて薬剤の散布量を制御する。このような制御を、車速連動散布制御という。制御用プロセッサ40は、すべてのノズル4から散布される薬剤の流量(単位時間当たりの散布量)をパラメータとした演算式を用いて、車速連動散布制御を実現する。すなわち、制御用プロセッサ40は、薬剤の散布条件に基づき、防除作業機1の車速に連動して薬剤を散布する。作業者は、表示・操作パネル11から、ノズル定数(散布圧力10kgf/cm2時におけるノズル一個あたりの噴霧量L/min)と散布圧力(kgf/cm2)と、10アールあたりの目標散布量(L/10a)とを入力する。制御用プロセッサ40は、防除作業機1の車速及び前記目標散布量等を用いて、図5に示す散布ホース23へ送られる薬剤の設定圧力を計算する。そして、制御用プロセッサ40は、計算した設定圧力となるように、散布ホース23へ供給される薬剤の量を調整する。薬剤の量は、制御用プロセッサ40が、流量制御モータ29Mを駆動して流量制御弁29の開度を調整することにより調整される。ここで、防除作業機1の車速は、GPS受信部10が生成した防除作業機1の車速又は車速センサ90により検出された防除作業機1の車速である。次に、GPS受信部10について説明する。
【0037】
図7は、本実施形態に係る防除作業機が有するGPS受信部の構成例を示す模式図である。GPS受信部10は、複数のGPS衛星SG1、SG2等から受信した電波に基づき、防除作業機1の位置に関する情報(位置情報)及びGPS車速Vg等を出力する。GPS受信部10は、受信アンテナ50と、受信回路51と、信号処理回路52と、時計回路53と、メモリ54と、GPS用プロセッサ55と、送受信回路56とを含む。
【0038】
受信アンテナ50は、複数のGPS衛星SG1、SG2等が発信した電波を受信する。受信回路51は、受信アンテナ50と接続されており、受信アンテナ50が受信したGPS衛星SG1、SG2等が発信した電波を電気信号に変換する。信号処理回路52は、受信回路51が出力した電気信号を、GPS用プロセッサ55が利用できる形に変換して出力する。時計回路53は、時刻を計時してGPS用プロセッサ55へ入力する。メモリ54は、GPS用プロセッサ55の処理に必要なデータを記憶したり、GPS用プロセッサ55の処理に必要なコンピュータプログラムを展開したりする。
【0039】
GPS用プロセッサ55は、複数のGPS衛星SG1、SG2等が発信した電波に基づき、GPS受信部10の位置についての情報を計算し、送受信回路56に出力する。また、GPS用プロセッサ55は、GPS受信部10の位置についての情報に基づき、GPS受信部10の速度を計算し、送受信回路56に出力する。GPS受信部10は、防除作業機1に搭載されているので、GPS受信部10の位置についての情報は、防除作業機1の位置に関する情報(位置情報)となる。また、前記速度は、GPS衛星SG1、SG2の電波に基づいて得られた防除作業機1の車速であり、これが上述したGPS車速Vgである。
【0040】
送受信回路56は、制御装置9が有する制御用プロセッサ40と、制御装置9の入出力インターフェース43を介して接続されている。送受信回路56は、GPS用プロセッサ55が求めた位置情報を制御装置9の入出力インターフェース43を介して制御用プロセッサ40へ出力する。制御用プロセッサ40は、前記位置情報を用いて、防除作業機1を制御したり、GPS受信部10に対してデータの変更要求を発信したりする。なお、GPS車速Vgは、制御装置9の制御用プロセッサ40が、GPS受信部10から得た位置情報に基づいて求めるようにしてもよい。また、本実施形態において、防除作業機1は、GPS受信部10を備えていなくてもよい。
【0041】
図8は、本実施形態に係る防除作業機が有する操作パネルの一例を示す模式図である。表示・操作パネル11は、表示部11Dと、手動スイッチ80と、ポンプスイッチ81と、設定スイッチ82と、累計リセットスイッチ87と、表示切替スイッチ85と、自動スイッチ86と、自動リフトスイッチ88とを含む。表示部11Dは、図6に示す制御用プロセッサ40が求めた、防除作業機1が圃場の薬剤を散布する領域へ進入する進入位置を表示する。また、表示部11Dは、防除作業機1が薬剤を散布する圃場に関する情報、散布する薬剤に関する情報、防除作業機1の運転状態に関する情報等を表示する。圃場に関する情報としては、例えば、圃場の位置及び面積がある。後者に関する情報としては、例えば、薬剤の種類、散布量、図5に示すポンプ27の吐出圧力の設定値(設定圧力)、散布した薬剤の累計値等がある。表示部11Dは、例えば、液晶ディスプレイ、有機ELディスプレイ等を用いることができる。
【0042】
手動スイッチ80は、薬剤の散布において、作業者が自身の操作で薬剤の散布条件を変更したり、散布幅を変更したりする場合に操作する入力手段である。手動スイッチ80が操作されると、図6に示す制御装置9は、設定スイッチ82が散布条件の変更あるいは散布幅の変更を受け付けるように設定する。ポンプスイッチ81は、図5に示すポンプ27を起動させるための入力手段である。ポンプスイッチ81が操作されると、ポンプ27が起動し、薬剤の散布が開始される。設定スイッチ82は、薬剤の散布条件を入力するための入力手段である。設定スイッチ82は、薬剤の散布量を設定するための散布量設定スイッチ82Aと、ポンプ27の吐出圧力を設定するための圧力設定スイッチ82Bと、設定値を増減させる増減スイッチ82Cと、設定を確定するための設定スイッチ82Dとを含む。累計リセットスイッチ87は、散布した薬剤の累計量をリセットする際に用いられる入力手段である。表示切替スイッチ85は、表示部11Dに表示される情報を切り替える際に用いられる入力手段である。自動スイッチ86は、薬剤の散布において、設定された散布条件で薬剤を自動散布する場合に操作される入力手段である。この自動スイッチ86がONとなるように操作されると、車速センサからの情報に基づき散布量が均一になるように調整されて自動散布される。そして、走行停止状態では自動的に散布停止となる。
【0043】
自動リフトスイッチ88は、防除作業機1の操舵輪、すなわち前輪3FL、3FRが所定角度以上操舵されているときに、車体1Bの旋回方向外側に配置されている散布ブームを上昇させる散布ブーム自動上昇制御の実行と非実行とを切り替える。自動リフトスイッチ88がONになっているときには、前記散布ブーム自動上昇制御が実行され、自動リフトスイッチ88がOFFになっているときには、前記自動上昇制御が実行されない。
【0044】
自動リフトスイッチ88は、第1自動リフトスイッチ88Lと、第2自動リフトスイッチ88Rとを含む。第1自動リフトスイッチ88Lは、第1散布ブーム5Lの散布ブーム自動上昇制御の実行と非実行とを切り替える。第2自動リフトスイッチ88Rは、第2散布ブーム5Rの散布ブーム自動上昇制御の実行と非実行とを切り替える。このように、本実施形態では、第1散布ブーム5Lの散布ブーム自動上昇制御の切り替えと、第2散布ブーム5Rの散布ブーム自動上昇制御の切り替えとをそれぞれ独立して実行することができる。例えば、第1散布ブーム5Lに対してのみ散布ブーム自動上昇制御を実行させ、第2散布ブーム5Rに対しては散布ブーム自動上昇制御を実行させないようにすることもできる。なお、第1散布ブーム5Lの散布ブーム自動上昇制御と、第2散布ブーム5Rの散布ブーム自動上昇制御とを連動して切り替えられるようにしてもよい。
【0045】
図9は、本実施形態に係る防除作業機が圃場で薬剤を散布する際に旋回しているときの状態を示す模式図である。防除作業機1は、圃場FWにおいて、作物が植えられていない端部まで到達すると、旋回進行方向を180度変更した後、次の薬剤散布領域へ進入する。図9に示す一点鎖線は、防除作業機1の旋回時における幅方向中心の軌跡である。圃場FWの端部は、畦道AR又は圃場に隣接していることが多いので、防除作業機1が旋回する場合、第1散布ブーム5L又は第2散布ブーム5Rの高さが旋回前と同じであると、畦道AR又は隣接する圃場に第1散布ブーム5L又は第2散布ブーム5Rが張り出すおそれがある。このため、本実施形態において、散布制御装置として機能する制御装置9は、上述した散布ブーム自動上昇制御を実行することにより、防除作業機1の制御の旋回時においては、旋回方向外側の散布ブームを自動的に上昇させる。このようにすることで、制御装置9は、散布ブームが畦道AR等に張り出して、建物、隣接する圃場の作物若しくは畦道AR等に存在する車両等の物体又は畦道AR等に存在する人間若しくは動物等の生物といった、防除作業機1の周辺に存在する生物又は物等と干渉するおそれを低減することができる。同時に、防除作業機1の旋回時において、散布ブームの操作に対する作業者の負担を軽減することができる。本実施形態において、さらに、制御装置9は、防除作業機1が旋回する際に、作業者の負担を軽減し、かつ旋回方向外側の散布ブームが畦道AR又は隣接する圃場に散布ブームが張り出すおそれをより確実に低減するように散布ブームを制御する。次に、防除作業機1が旋回する際における散布ブームの第1制御例を説明する。
【0046】
(第1制御例)
図10は、本実施形態に係る散布ブームの第1制御例を示すフローチャートである。第1制御例は、自動リフトスイッチ88が散布ブーム自動上昇制御を非実行としている場合において、防除作業機1の旋回外側の散布ブームに設けられたノズル4に対する薬剤の供給が停止されたときには、制御装置9が旋回外側の散布ブームを上昇させる点に特徴がある。また、第1制御例は、旋回外側の散布ブームのノズル4に薬剤の供給が開始されると、旋回外側の散布ブームを上昇前の高さまで下降させる。第1制御例を実行するにあたり、ステップS101において、制御装置9は、防除作業機1が薬剤を散布中である場合(ステップS101、Yes)、処理をステップS102へ進める。防除作業機1が薬剤を散布中でない場合(ステップS101、No)、制御装置9は、処理をSTARTに戻す。
【0047】
制御装置9は、例えば、図6に示す流量制御モータ29Mが駆動中である場合、例えば、流量制御モータ29Mに駆動電流が流れている場合には、防除作業機1が薬剤を散布中であるとして(ステップS101、Yes)、処理をステップS102へ進める。ステップS102において、制御装置9は、防除作業機1の操舵輪の操舵角αを、操舵角センサ91から取得する。そして、制御装置9は、処理をステップS103へ進める。ステップS103において、制御装置9は、ステップS102で取得した操舵角αと、予め定めた操舵角閾値αc1とを比較する。前記比較の結果、制御装置9は、α≧αc1である場合(ステップS103、Yes)には処理をステップS104へ進め、α<αc1である場合(ステップS103、No)には処理をSTARTに戻す。
【0048】
操舵角閾値αc1は、防除作業機1が旋回中であると判断できる程度の大きさに設定されて、例えば、記憶部41のROM41B又はEEPROM41Cに保存される。なお、α<αc1である場合、防除作業機1は直進状態又は旋回半径の大きい旋回状態である。圃場によっては湾曲した部分もあるので、防除作業機1は、大きな旋回半径で旋回しながら薬剤を散布することもある。ステップS103において、制御装置9は、α≧αc1である時間が所定時間以上継続した場合に、防除作業機1が旋回中であるとして、処理をステップS104に進めてもよい。このようにすれば、より確実に防除作業機1が旋回中であることの判定精度が向上する。
【0049】
ステップS104において、制御装置9は、防除作業機1の旋回方向を演算する。旋回方向は、例えば、操舵角センサ91が検出した防除作業機1のハンドル7の回転方向から求めることができる。制御装置9は、前記旋回方向を演算したら、処理をステップS105へ進める。ステップS105において、制御装置9は、旋回外側の散布ブームに取り付けられたノズル4へ薬剤を供給する散布コック(旋回外側用散布コック)が閉じている場合(ステップS105、Yes)、処理をステップS106へ進め、旋回外側の散布コックが閉じていない場合、すなわち、開いている場合(ステップS105、No)、処理をSTARTに戻す。
【0050】
例えば、防除作業機1が右旋回している場合、旋回外側の散布ブームは防除作業機1の進行方向左側に配置された散布ブーム、すなわち、第1散布ブーム5Lである。また、防除作業機1が左旋回している場合、旋回外側の散布ブームは防除作業機1の進行方向右側に配置された散布ブーム、すなわち、第2散布ブーム5Rである。第1散布ブーム5Lが旋回外側である場合、制御装置9は、図5に示す第1散布コック32Lが閉じているか、開いているかによってステップS105の分岐を異ならせる。第2散布ブーム5Rが旋回外側である場合、制御装置9は、図5に示す第2散布コック32Rが閉じているか、開いているかによってステップS105の分岐を異ならせる。
【0051】
旋回外側用散布コックが閉じている場合(ステップS105、Yes)、制御装置9は、ステップS106において、旋回外側の散布ブームを上昇させる。第1散布ブーム5Lが旋回外側である場合、制御装置9は、図2、図6に示す左上下アクチュエータ12Lを動作させて、第1散布ブーム5Lを上昇させる。第2散布ブーム5Rが旋回外側である場合、制御装置9は、図2、図6に示す右上下アクチュエータ12Rを動作させて、第2散布ブーム5Rを上昇させる。このように、制御装置9は、旋回外側の散布ブームに設けられたノズル4に対する薬剤の供給が停止されたとき(旋回外側用散布コックが閉じられたとき)には、旋回外側の散布ブームを上昇させる。すなわち、散布コックが閉じられている場合には、その散布コックに対応するノズル4からは薬剤を散布しないと判断できるので、薬剤を散布しないノズル4が設けられている散布ブームを上昇させる。また、薬剤の散布作業において、作業者が、散布コックの開閉を忘れる可能性は低いと考えられるので、旋回外側用散布コックが閉じられたときに、旋回外側の散布ブームを上昇させるようにすることで、旋回外側の散布ブームが防除作業機1の周囲に存在する生物又は物と干渉するおそれをより確実に低減できる。
【0052】
このように、第1制御例は、図8に示す自動リフトスイッチ88がON又はOFFに関わらず、旋回外側の散布コックが閉じられている場合には、旋回外側の散布ブームを上昇させる。このようにすることで、畦道又は隣接する圃場と旋回外側の散布ブームとの干渉を回避するとともに、散布コックの開閉と旋回外側の散布ブームの上昇とを連動させることで、防除作業機1の旋回時における散布ブームの操作に対する作業者の負荷を低減することができる。また、防除作業機1の作業者が、自動リフトスイッチ88をONにし忘れていた場合であっても、旋回外側用散布コックが閉じられたことにより旋回外側の散布ブームを上昇させて、隣接する圃場と旋回外側の散布ブームとの干渉を回避できるので、作業者の操作に対する負荷を低減できる。特に、作業者が防除作業機1を旋回させているときには、作物をできる限り踏み倒さないように細心の注意を払っている。第1制御例は、旋回外側用散布コックが閉じられたことによって制御装置9が旋回外側の散布ブームを自動的に上昇させるので、作業者の操作に対する負荷を低減して、作業者は旋回操作に集中することができるという利点がある。さらに、隣接する圃場の作物、特に丈の高い作物と旋回外側の散布ブームとの干渉も回避できる。さらに、枕地付近の旋回においては、旋回外側の散布ブームが折損するおそれも大幅に低減できる。
【0053】
制御装置9は、旋回外側の散布ブームを上昇させたらステップS107へ進む。ステップS107において、制御装置9は、旋回外側用散布コックが開になった場合(ステップS107、Yes)、処理をステップS108に進め、旋回外側用散布コックが開になっていない場合、すなわち、閉のままである場合(ステップS107、No)、処理をSTARTに戻す。
【0054】
旋回外側用散布コックが開かれた場合、旋回外側の散布ブームに取り付けられたノズル4から薬剤の散布を再開すると判断できる。このため、旋回外側用散布コックが開になった場合(ステップS107、Yes)、ステップS108において、制御装置9は、外側の散布ブームを下降させる。このように、制御装置9は、旋回外側の散布ブームに設けられたノズル4に対する薬剤の供給が開始されたとき(旋回外側用散布コックが開かれたとき)には、旋回外側の散布ブームを下降させる。
【0055】
次に、ステップS109に進み、制御装置9は、下降させている旋回外側の散布ブームの高さが上昇前の高さになっていない場合(ステップS109、No)、旋回外側の散布ブームの高さが上昇前の高さになるまで、旋回外側の散布ブームを下降させる。下降させている旋回外側の散布ブームの高さが上昇前の高さになった場合(ステップS109、Yes)、制御装置9は、処理をSTARTに戻し、防除作業機1の旋回及び散布コックの状態を監視しながら、第1制御例を継続する。このようにすることで、作業者の操作に対する負荷を軽減できるとともに、防除作業機1を安全に旋回させることができる。また、薬剤の散布を再開するときには、上昇させていた散布ブームを確実かつ適正な位置に下降させて薬剤を散布することができるので、散布精度が向上する。次に、防除作業機1が旋回する際における散布ブームの第2制御例を説明する。
【0056】
(第2制御例)
図11は、本実施形態に係る散布ブームの第2制御例を示すフローチャートである。第2制御例は、散布ブーム自動上昇制御を実行可能な状態に自動リフトスイッチ88が切り替わっている場合、すなわち、自動リフトスイッチ88がONになっている場合、ノズル4に対する薬剤の供給が停止されると、薬剤の供給が停止されたノズルが設けられている散布ブームを上昇させる点に特徴がある。また、第2制御例は、薬剤の供給が停止されているノズル4に対して薬剤の供給が開始されると、薬剤の供給が開始されたノズル4が設けられている散布ブームを、当該散布ブームが上昇する前の高さまで下降させる。
【0057】
第2制御例を実行するにあたり、ステップS201において、制御装置9は、防除作業機1が薬剤を散布中である場合(ステップS201、Yes)、処理をステップS202へ進める。防除作業機1が薬剤を散布中でない場合(ステップS201、No)、制御装置9は、処理をSTARTに戻す。防除作業機1が薬剤を散布中であるか否かの判断は、第1制御例と同様である。ステップS202において、制御装置9は、図8に示す自動リフトスイッチ88がONである場合(ステップS202、Yes)、処理をステップS203に進め、自動リフトスイッチ88がOFFである場合(ステップS202、No)、処理をSTARTに戻す。
【0058】
ステップS203において、制御装置9は、図5に示す散布コック、より具体的には第1散布コック32Lと第2散布コック32Rとの少なくとも一方が閉じられている場合(ステップS203、Yes)、処理をステップS204に進め、第1散布コック32L及び第2散布コック32Rの両方が閉じられていない、すなわち開いた状態である場合(ステップS203、No)、処理をSTARTに戻す。
【0059】
ステップS204において、制御装置9は、散布コックが閉じられたノズル4、すなわち、薬剤の供給が停止されたノズル4が設けられている散布ブームを上昇させる。例えば、制御装置9は、第1散布コック32Lが閉じられた場合には第1散布ブーム5Lを上昇させ、第2散布コック32Rが閉じられた場合には第2散布ブーム5Rを上昇させる。防除作業機1の作業者が散布コックを閉じる操作は、作業者が薬剤の散布は不要であると判断して行われる操作である。このため、薬剤の散布が停止、すなわち、薬剤の供給が停止されたノズル4が設けられている散布ブームは、薬剤の散布時における高さに保持される必要はない。第2制御例は、薬剤の散布が停止された側の散布ブームを制御装置9が自動的に上昇させることにより、散布ブームが畦道AR又は隣接する圃場に侵入するおそれを低減できるので、安全性が向上する。また、薬剤の供給が停止された散布ブームが、防除作業機1の周辺に存在する建造物又は作物等と干渉するおそれを低減できるので、散布ブームが折損するおそれ及び作物の品質低下のおそれを最小限に抑えることができる。さらに、変形圃場での薬剤の散布作業において、操作に対する作業者の負荷を低減できる。
【0060】
次に、ステップS205に進み、制御装置9は、上昇させた散布ブームに設けられているノズル4に薬剤を供給する散布コックが再び開かれた場合(ステップS205、Yes)、処理をステップS206へ進め、前記散布コックが閉じられている場合(ステップS205、No)、処理をSTARTに戻す。閉じられた散布コックが再び開かれた場合、その散布コックから薬剤が供給されるノズル4から薬剤の散布を再開すると判断できる。このため、散布コックが再び開になった場合(ステップS205、Yes)、ステップS206において、制御装置9は、薬剤の供給が再開されたノズル4が設けられている散布ブームを下降させる。
【0061】
次に、ステップS207に進み、制御装置9は、下降させている散布ブームの高さが上昇前の高さになっていない場合(ステップS207、No)、下降させている散布ブームの高さが上昇前の高さになるまで、散布ブームを下降させる。下降させている散布ブームの高さが上昇前の高さになった場合(ステップS207、Yes)、制御装置9は、処理をSTARTに戻し、防除作業機1の旋回及び散布コックの状態を監視しながら、第2制御例を継続する。このようにすることで、作業者の操作に対する負荷を軽減できるとともに、薬剤の散布を再開するときには、上昇させていた散布ブームを確実かつ適正な位置に下降させて薬剤を散布することができるので、散布精度が向上する。
【0062】
図12は、本実施形態の変形例に係る表示・操作パネルの一例を示す図である。この表示・操作パネル11は、図8に示す自動リフトスイッチ88に加えて、自動水平スイッチ89を備える。自動水平スイッチ89は、防除作業機1が薬剤を散布しているときに、第1散布ブーム5Lと第2散布ブーム5Rと第3散布ブーム5Cとの水平を自動的に調整するためのスイッチである。自動水平スイッチ89がONになると、制御装置9は、リンク角速度センサ96及びリンク傾斜センサ97の検出値に基づいて水平バルブ14を動作させ、第1散布ブーム5Lと第2散布ブーム5Rと第3散布ブーム5Cとのうち、少なくとも薬剤を散布しているノズル4を有する散布ブームが水平になるように制御する。この制御を、散布ブーム自動水平制御という。
【0063】
本変形例において、制御装置9は、自動水平スイッチ89のONになり、散布ブーム自動水平制御が実行される状態となった場合には、第1制御例を実行する。すなわち、制御装置9は、自動リフトスイッチ88のON又はOFFに関わらず、旋回外側の散布コックが閉じられている場合には、旋回外側の散布ブームを上昇させる。このようにすることで、上述した第1制御例の作用、効果が得られる。また、本変形例において、制御装置9は、自動水平スイッチ89がONになり、散布ブーム自動水平制御が実行される状態となった場合には、第2制御例を実行する。すなわち、制御装置9は、散布ブーム自動水平制御が実行可能な状態に自動水平スイッチ89が切り替わっている場合、すなわち、自動水平スイッチ89がONになっている場合、ノズル4に対する薬剤の供給が停止されると、薬剤の供給が停止されたノズルが設けられている散布ブームを上昇させる。このようにすることで、上述した第2制御例の作用、効果が得られる。
【0064】
防除作業機1は、旋回中において、旋回内側の散布ブームの薬剤散布を継続することが多い。本変形例は、散布ブーム自動水平制御及び散布ブーム自動上昇制御の実行と非実行とを、自動水平スイッチ89でも切り替えることができるようにしている。このようにすると、自動水平スイッチ89がONになった場合には、旋回内側の散布ブームは自動的に水平に制御されるとともに、旋回外側の散布アームは自動的に上昇して、安全に防除作業機1が旋回できるという利点がある。本変形例においては、作業者が自動リフトスイッチ88の操作を忘れた場合であっても、自動水平スイッチ89がONになっていれば第1制御例及び第2制御例が実行されるという利点もある。このように、本変形例は、作業者が自動リフトスイッチ88の操作を忘れた場合であっても、自動水平スイッチ89がONになっていれば、薬剤の散布を継続しながら散布ブームを操作する作業者の負荷を軽減できるという利点がある。
【0065】
また、本変形例において、自動水平スイッチ89は、散布ブーム自動水平制御及び散布ブーム自動上昇制御の実行と非実行とを切り替えることができるようにしてもよい。すなわち、制御装置9は、自動水平スイッチ89がONになった場合、散布ブーム自動水平制御及び散布ブーム自動上昇制御の両方を実行し、自動水平スイッチ89がOFFになった場合、散布ブーム自動水平制御及び散布ブーム自動上昇制御の両方を実行しない。このようにすることで、簡単な操作で散布ブーム自動水平制御及び散布ブーム自動上昇制御の両方を実行できるので、作業者の操作を簡単にできるとともに、作業者は操作を理解しやすくなる。また、自動水平スイッチ89で散布ブーム自動水平制御及び散布ブーム自動上昇制御の実行と非実行とを切り替えるので、自動リフトスイッチ88は不要になる。その結果、表示・操作パネル11を構成する部品点数を削減し、製造コストを低減できる。
【0066】
(第3制御例)
図13は、本実施形態に係る散布ブームの第3制御例を示すフローチャートである。第3制御例は、散布ブーム自動上昇制御を実行する際に、旋回外側の散布ブームが予め定めた所定の高さ(所定のブーム角度)以上である場合には、旋回外側の散布ブームを上昇させない点に特徴がある。第3制御例を実行するにあたって、ステップS301からステップS304は、第1制御例のステップS101からステップS104と同様なので、説明を省略する。ステップS305において、制御装置9は、旋回外側の散布ブームの角度(ブーム角度)θを、図2、図6に示すブーム角度右センサ98R又はブーム角度左センサ98Lから取得する。
【0067】
次に、ステップS306に進み、制御装置9は、ステップS305で取得したブーム角度θを、予め定めたブーム角度閾値(所定のブーム角度)θc1と比較する。ブーム角度閾値θc1は、例えば、45度以上の任意の値とすることができる。前記比較の結果、θ≧θc1である場合(ステップS306、Yes)、旋回外側の散布ブームは既に十分な高さまで上昇している。この場合、制御装置9は、旋回外側の散布ブームを上昇させず、処理をSTARTに戻し、防除作業機1の旋回及び散布コックの状態を監視しながら、第3制御例を継続する。
【0068】
前記比較の結果、θ<θc1である場合(ステップS306、No)、制御装置9は、ステップS307に進み、旋回外側の散布アームを上昇させる。次に、ステップS308において、制御装置9は、旋回外側の散布アームのブーム角度θを取得する。そして、ステップS309に進み、制御装置9は、ステップS308で取得したブーム角度θを、予め定めたブーム角度閾値(所定のブーム角度)θc1と比較する。前記比較の結果、θ<θc1である場合(ステップS308、No)、旋回外側の散布ブームは十分な高さまで上昇していないので、制御装置9は、θ≧θc1となるまでステップS308及びステップS309を繰り返す。前記比較の結果、θ≧θc1である場合(ステップS309、Yes)、旋回外側の散布ブームは既に十分な高さまで上昇している。この場合、ステップS310に進み、制御装置9は、旋回外側の散布ブームの上昇を停止した後、処理をSTARTに戻し、防除作業機1の旋回及び散布コックの状態を監視しながら、第3制御例を継続する。このようにすることで、第3制御例は、散布ブームを上昇させる場合において、旋回外側の散布アームの過剰な上昇を抑制できるので、防除作業機1の旋回が終了した後においては、上昇させた散布ブームを上昇前の高さまで下降させる時間を短縮できる。
【0069】
(第4制御例)
図14は、本実施形態に係る散布ブームの第4制御例を示すフローチャートである。第4制御例は、薬剤の散布中におけるブーム角度の平均値(平均角度)θaを求め、散布ブーム自動上昇制御を実行する際に、旋回開始時における旋回外側の散布ブームのブーム角度θとθaとの差が予め定めた所定の閾値(上昇開始角度閾値)以上である場合には、旋回外側の散布ブームを上昇させない点に特徴がある。第4制御例を実行するにあたって、ステップS401は、第1制御例のステップS101と同様なので、説明を省略する。ステップS402において、制御装置9は、散布ブーム、より具体的には、第1散布ブーム5L及び第2散布ブーム5Rのブーム角度θを、図2、図6に示すブーム角度右センサ98R及びブーム角度左センサ98Lから取得する。
【0070】
次に、ステップS403に進み、制御装置9は、取得したブーム角度θの平均角度θaを算出する。平均角度θaは、防除作業機1が薬剤を散布している間に取得した複数のブーム角度θの平均値である。平均角度θaは、第1散布ブーム5Lと第2散布ブーム5Rとでそれぞれ別個に求めてもよいし、第1散布ブーム5L及び第2散布ブーム5Rの平均値としてもよい。制御装置9は、算出した平均角度θaを記憶部41に保存する。
【0071】
次に、ステップS404に進むが、ステップS404からステップS406は、第1制御例のステップS102からステップS104と同様なので、説明を省略する。ステップS407において、制御装置9は、旋回外側の散布ブームのブーム角度θを取得する。次に、ステップS408に進み、制御装置9は、ステップS407で取得したブーム角度θと平均角度θaとの差Δθを算出する。平均角度θaが第1散布ブーム5Lと第2散布ブーム5Rとでそれぞれ別個に求められている場合、制御装置9は、旋回外側の散布ブームと同じ散布ブームの平均角度θaを記憶部41から読み出して、ブーム角度θと平均角度θaとの差Δθを算出する。平均角度θaが第1散布ブーム5L及び第2散布ブーム5Rの平均値である場合、平均角度θaは1つなので、制御装置9は、平均角度θaを記憶部41から読み出して、ブーム角度θと平均角度θaとの差Δθを算出する。
【0072】
次に、ステップS409に進み、制御装置9は、Δθと、予め定めた上昇開始角度閾値θc2とを比較する。前記比較の結果、Δθ≧θc2である場合(ステップS409、Yes)、旋回外側の散布ブームは既に十分な高さまで上昇している。この場合、制御装置9は、旋回外側の散布ブームを上昇させず、処理をSTARTに戻し、防除作業機1の旋回及び散布コックの状態を監視しながら、第4制御例を継続する。
【0073】
前記比較の結果、Δθ<θc2である場合(ステップS409、No)、旋回外側の散布ブームは十分な高さまで上昇していない。この場合、制御装置9は、ステップS410に進み、旋回外側の散布アームを上昇させる。次に、ステップS411において、制御装置9は、旋回外側の散布アームのブーム角度θを取得する。そして、ステップS411に進み、制御装置9は、ステップS410で取得したブーム角度θを、ブーム角度設定値θsと比較する。ブーム角度設定値θsは、例えば、θa+θc2とすることができる。
【0074】
前記比較の結果、θ<θsである場合(ステップS412、No)、旋回外側の散布ブームは十分な高さまで上昇していないので、制御装置9は、θ≧θsとなるまでステップS411及びステップS412を繰り返す。前記比較の結果、θ≧θsである場合(ステップS412、Yes)、旋回外側の散布ブームは既に十分な高さまで上昇している。この場合、ステップS413に進み、制御装置9は、旋回外側の散布ブームの上昇を停止した後、処理をSTARTに戻し、防除作業機1の旋回及び散布コックの状態を監視しながら、第4制御例を継続する。このようにすることで、第4制御例は、散布ブームを上昇させる場合において、旋回外側の散布アームの過剰な上昇を抑制できるので、防除作業機1の旋回が終了した後においては、上昇させた散布ブームを上昇前の高さまで下降させる時間を短縮できる。
【0075】
(第5制御例)
図15は、本実施形態に係る散布ブームの第5制御例を示すフローチャートである。第5制御例は、薬剤の散布中に旋回中の防除作業機1が旋回を終了するときにおいて、旋回外側の散布ブームのブーム角度θが、予め定めた所定の閾値(下降時閾値)θc3以下である場合には、旋回外側の散布ブームを下降させない点に特徴がある。第5制御例を実行するにあたって、ステップS501は、第1制御例のステップS101と同様なので、説明を省略する。ステップS502において、防除作業機1が旋回中でない場合(ステップS502、No)、制御装置9は、処理をSTARTに戻し、防除作業機1の旋回及び散布コックの状態を監視しながら、第5制御例を継続する。
【0076】
ステップS502において、防除作業機1が旋回中である場合(ステップS502、Yes)、ステップS503に進み、制御装置9は、旋回外側の散布ブームを上昇させる。次に、ステップS504に進み、制御装置9は、旋回終了判定を実行する。旋回終了判定は、例えば、防除作業機1の進行方向が略180度変更された場合又は上述した操舵角閾値αc1を一度検出された後に直進状態の操舵角が検出され、再び操舵角閾値αc1が検出された場合等に、防除作業機1の旋回は終了するとみなすものである。また、操舵角閾値αc1が一度検出された後に、操舵角αが直進状態の操舵角に変化する状態が検出された場合に、防除作業機1の旋回は終了するとみなしてもよい。
【0077】
次に、ステップS505に進み、制御装置9は、防除作業機1の旋回は終了すると判定した場合(ステップS505、Yes)、処理をステップS506に進め、防除作業機1の旋回は終了していないと判定した場合(ステップS505、No)、ステップS504及びステップS505を繰り返す。ステップS506において、制御装置9は、旋回外側の散布ブームのブーム角度θを取得する。次に、ステップS507に進み、制御装置9は、ステップS507で取得したブーム角度θと、下降時閾値θc3とを比較する。前記比較の結果、θ≦θc3である場合(ステップS507、Yes)、旋回外側の散布ブームは既に十分な高さまで下降している。この場合、制御装置9は、旋回外側の散布ブームを下降させず、処理をSTARTに戻し、防除作業機1の旋回及び散布コックの状態を監視しながら、第5制御例を継続する。
【0078】
前記比較の結果、θ>θc3である場合(ステップS507、No)、旋回外側の散布ブームは十分な高さまで下降していない。この場合、制御装置9は、ステップS508に進み、旋回外側の散布アームを下降させる。次に、ステップS509において、制御装置9は、旋回外側の散布アームのブーム角度θを取得する。そして、ステップS510に進み、制御装置9は、ステップS509で取得したブーム角度θを、下降時閾値θc3と比較する。
【0079】
前記比較の結果、θ>θc3である場合(ステップS510、No)、旋回外側の散布ブームは十分な高さまで下降していないので、制御装置9は、θ≦θc3となるまでステップS508からステップS509及びステップS510を繰り返す。前記比較の結果、θ≦θc3である場合(ステップS510、Yes)、旋回外側の散布ブームは既に十分な高さまで下降している。この場合、ステップS511に進み、制御装置9は、旋回外側の散布ブームの下降を停止した後、処理をSTARTに戻し、防除作業機1の旋回及び散布コックの状態を監視しながら、第5制御例を継続する。このようにすることで、第5制御例は、散布ブームを下降させる場合において、旋回外側の散布アームの不必要な下降を抑制できるので、防除作業機1の旋回が終了した後において、旋回外側の散布ブームを薬剤の散布が可能な位置へ迅速に配置することができる。
【0080】
また、第5制御例は、防除作業機1の旋回中に、作業者が旋回外側の散布ブームを下降させてθ≦θc3となった場合、作業者の操作を優先させることになるので、作業者の意図に沿った散布ブームの制御が実現できる。なお、第5制御例においては、防除作業機1の旋回中に、作業者が旋回外側の散布ブームを下降させた場合、旋回外側の散布ブームを自動的に下降させないようにして、作業者の操作を優先させるようにしてもよい。
【0081】
(第6制御例)
図16は、本実施形態に係る散布ブームの第6制御例を示すフローチャートである。第6制御例は、薬剤の散布中に旋回外側の散布ブームを上昇させた後、ブーム角度θが予め定めた所定の閾値(ブーム保持閾値)θc4以上である状態で防除作業機1が予め定めた所定の距離(ブーム高さ保持距離閾値)Dc以上走行した場合には、その後の旋回で散布ブームは下降させない点に特徴がある。第5制御例を実行するにあたって、ステップS601からステップS604は、第1制御例のステップS101からステップS104と同様なので、説明を省略する。ステップS605において、制御装置9は、旋回外側の散布ブームを上昇させる。次に、ステップS606へ進み、制御装置9は、図1、図6に示す車速センサ90から、防除作業機1の車速Vを取得する。防除作業機1が図6、図7に示すGPS受信部10を有するとき、制御装置9は、GPS受信部10が生成したGPS車速VgをGPS受信部10から取得し、これを防除作業機1の車速Vとしてもよい。
【0082】
制御装置9は、車速Vを取得したらステップS607に進み、防除作業機1の走行距離Dを求める。走行距離Dは、ステップS605において制御装置9が旋回外側の散布ブームを上昇させたときから防除作業機1が走行した距離である。薬剤の散布において、通常、防除作業機1の車速Vは一定であるので、制御装置9は、旋回外側の散布ブームを上昇させたときから、走行距離Dを求めるまでに経過した時間と、車速Vとの積により、走行距離Dを求めることができる。走行距離Dが求められたら、ステップS608へ進む。
【0083】
ステップS608において、制御装置9は、ステップS607で求めた走行距離Dとブーム高さ保持距離閾値Dcとを比較する。前記比較の結果、D≧Dcである場合(ステップS608、Yes)、制御装置9は、旋回外側の散布ブームを下降させず、処理をSTARTに戻し、防除作業機1の旋回及び散布コックの状態を監視しながら、第5制御例を継続する。このようにすることで、第6制御例は、防除作業機1が旋回した後、薬剤の散布中断又は薬剤の散布終了により防除作業機1が圃場FWから出た場合等に、散布ブームが下降して建造物又は隣接する圃場の作物等と干渉するおそれを低減することができる。
【0084】
前記比較の結果、D<Dcである場合(ステップS608、No)、制御装置9は、ステップS609に進み、旋回終了判定を実行する。旋回終了判定は、第5制御例で説明した通りである。次に、制御装置9は、ステップS610に処理を進め、防除作業機1の旋回は終了すると判定した場合(ステップS610、Yes)、処理をステップS611に進める。また、制御装置9は、防除作業機1の旋回は終了していないと判定した場合(ステップS610、No)、防除作業機1の旋回が終了するまでステップS606以降の処理を実行する。ステップS611において、制御装置9は、旋回外側の散布ブームを下降させた後、処理をSTARTに戻し、防除作業機1の旋回及び散布コックの状態を監視しながら、第6制御例を継続する。
【0085】
(第7制御例)
図17は、本実施形態に係る散布ブームの第7制御例を示すフローチャートである。第7制御例は、旋回中に薬剤を散布している防除作業機1が旋回を終了するときに旋回外側の散布ブームを下降させる場合において、旋回外側の散布ブームのブーム角度θに応じて旋回外側の散布ブームの下降を開始する時期を変更する点に特徴がある。第7制御例を実行するにあたって、ステップS701からステップS705は、第5制御例のステップS501からステップS505と同様なので、説明を省略する。ステップS706において、制御装置9は、旋回外側の散布ブームのブーム角度θを取得する。
【0086】
次に、ステップS707に進み、制御装置9は、旋回外側の散布ブームの下降を開始させる時期(下降開始時期)を求める。下降開始時期は、旋回外側の散布ブームのブーム角度θが大きいほど早くする。例えば、旋回外側の散布ブームのブーム角度がθ1で、防除作業機1が車速V1で走行している場合には、操舵角がα1まで戻されたときに旋回外側の散布ブームの下降を開始すれば、次の薬剤散布領域に進入したタイミングで薬剤の散布を開始できるとする。第7制御例においては、防除作業機1が車速V1で走行しており、かつ旋回外側の散布ブームのブーム角度がθ1よりも大きいθ2である場合、操舵角がα1よりも大きいα2まで戻されたときに、旋回外側の散布ブームの下降を開始する。すなわち、ブーム角度θが大きい場合は、ブーム角度θが小さいときよりも下降開始時期を早くする。このようにすることで、旋回が終了した後における薬剤の散布までに、旋回外側の散布ブームを適切な高さとして、次の薬剤散布領域に進入したタイミングで薬剤の散布を開始することができる。
【0087】
制御装置9は、下降開始時期を求めたらステップS708に処理を進める。ステップS708において、制御装置9は、下降開始時期になっていない場合(ステップS708、No)には下降開始時期になるまで待機し、下降開始時期になった場合(ステップS708、Yes)には処理をステップS709に進める。ステップS709からステップS712は、第5制御例のステップS508からステップS511と同様なので説明を省略する。
【0088】
上記説明においては、下降開始時期になったら旋回外側の散布ブームの下降を開始した例を示したが、第7制御例はこれに限定されるものではない。例えば、操舵角がα1まで戻されたときに旋回外側の散布ブームの下降を開始すれば、次の薬剤散布領域に進入したタイミングで薬剤の散布が開始できる位置まで散布ブームを下降させることができるブーム角度θ1よりも旋回外側の散布ブームのブーム角度が大きい場合、散布ブームの下降開始前に、ブーム角度をθ1としておいてもよい。このようにしても、回が終了した後における薬剤の散布までに、旋回外側の散布ブームを適切な高さとして、次の薬剤散布領域に進入したタイミングで薬剤の散布を開始することができる。また、旋回中において、旋回外側の散布ブームの高さを低くすることができる時間を長くすることができるので、旋回中における防除作業機1の重心が高くなることを抑制することができる。その結果、防除作業機1は、より安定して旋回することができる。
【0089】
(第8制御例)
図18は、本実施形態に係る散布ブームの第8制御例を示すフローチャートである。図19は、本実施形態に係る散布ブームの第8制御例を示す図である。第8制御例は、旋回中に薬剤を散布している防除作業機1が旋回終了時に旋回外側の散布ブームを下降させる場合において、旋回外側の散布ブームのブーム角度が、散布ブームの上昇開始前におけるブーム角度(上昇前ブーム角度)θbよりも予め定めた設定角度Δθbだけ大きくなった時点で散布ブームの下降を停止する点に特徴がある。第8制御例を実行するにあたって、ステップS801からステップS805は、第3制御例のステップS301からステップS305と同様なので、説明を省略する。ステップS805において、制御装置9は、旋回外側の散布ブームのブーム角度θを取得する。
【0090】
ステップS805において、制御装置9は、旋回外側の散布ブームの角度(ブーム角度)θを取得したら、ステップS806に処理を進め、ステップS805で取得したブーム角度θを、上昇前ブーム角度θbとして記憶部41に保存する。次に、ステップS807に進み、制御装置9は、旋回外側の散布ブームを上昇させ、ステップS808へ進む。ステップS808において、制御装置9は、旋回終了判定を実行する。次に、ステップS809に進み、制御装置9は、防除作業機1の旋回は終了すると判定した場合(ステップS809、Yes)、処理をステップS810に進め、防除作業機1の旋回は終了していないと判定した場合(ステップS809、No)、ステップS808及びステップS809を繰り返す。
【0091】
ステップS810において、制御装置9は旋回外側の散布ブームを下降させ、ステップS811において、旋回外側の散布ブームのブーム角度θを取得する。図19の矢印DWで示す方向は、旋回外側の散布ブームが下降する方向である。次に、ステップS812に進み、制御装置9は、記憶部41に保存した上昇前ブーム角度θbを取得し、θb+Δθbと比較する。設定角度Δθbは、旋回外側の散布ブームの下がり過ぎを回避するためのものであり、この目的を達成できる範囲で適切な値が選択される。ステップS812において、θがθb+Δθbでない場合(ステップS812、No)、制御装置9は、θ=θb+ΔθbになるまでステップS810からステップS812を実行する。
【0092】
θ=θb+Δθbである場合(ステップS812、Yes)、制御装置9は、ステップS813に進み、旋回外側の散布ブームの下降を停止した後、処理をSTARTに戻し、防除作業機1の旋回及び散布コックの状態を監視しながら、第8制御例を継続する。このように、旋回外側の散布ブームを下降させる場合において、旋回外側の散布ブームのブーム角度が、上昇前ブーム角度θbよりも予め定めた設定角度Δθbだけ大きくなった時点で散布ブームの下降を停止することで、散布ブームの下がり過ぎを回避することができる。
【0093】
(第9制御例)
図20は、本実施形態に係る散布ブームの第9制御例で用いる自動リフトスイッチを示す図である。図21は、本実施形態に係る散布ブームの第9制御例を示すフローチャートである。第9制御例は、散布ブーム自動上昇制御の実行と非実行とを切り替えるとともに、散布ブームの上昇高さを設定できる自動リフトスイッチ88Aを用いた場合の制御例である。
【0094】
図20に示す自動リフトスイッチ88Aは、例えば、ロータリースイッチ又はボリューム等であり、OFFからONにすると散布ブーム自動上昇制御を非実行から実行に切り替えることができ、さらに、レベルの調整により、旋回外側の散布ブームの上昇高さ(角度)を設定することができる。第9制御例においては、自動リフトスイッチ88Aのレベルを示す数値が大きくなるにしたがって、旋回外側の散布ブームの上昇高さが大きくなる。自動リフトスイッチ88Aは、図8に示す表示・操作パネル11に設けられる。この自動リフトスイッチ88Aを用いた第9制御例を実行するにあたり、ステップS901において、制御装置9は、自動リフトスイッチ88Aの情報、すなわち、ONであるか、OFFであるか、ONである場合にはそのレベルを取得する。
【0095】
次に、制御装置9は、ステップS902へ処理を進め、自動リフトスイッチ88AがONでない場合(ステップS902、No)には、処理をSTARTに戻し、防除作業機1の旋回及び散布コックの状態を監視しながら、第8制御例を継続する。自動リフトスイッチ88AがONである場合(ステップS902、Yes)、ステップS903に進み、制御装置9は、自動リフトスイッチ88Aの設定値、すなわちレベルを取得する。そして、ステップS904に進み、制御装置9は、取得した設定値に基づいて旋回外側の散布ブームを上昇させる角度(上昇角度)を設定して、記憶部41に保存する。散布ブーム自動上昇制御が実行される場合、制御装置9は、記憶部41から上昇角度を取得し、旋回外側の散布ブームを上昇角度になるまで上昇させる。このように、散布ブーム自動上昇制御の実行と非実行とを切り替えるとともに、散布ブームの上昇高さを設定できる自動リフトスイッチ88Aを用いることにより、散布ブーム自動上昇制御の設定が容易になり、利便性が向上する。
【0096】
(第10制御例)
図22は、本実施形態に係る散布ブームの第10制御例を示すフローチャートである。第10制御例は、散布ブームが閉じている場合には、散布ブーム自動上昇制御を実行させない点に特徴がある。第10制御例を実行するにあたり、ステップS1001からステップS1003は、第1制御例のステップS101からステップS103と同様なので、説明を省略する。
【0097】
ステップS1004において、制御装置9は、図2、図6に示す右開閉アクチュエータ13R及び左開閉アクチュエータ13Lから第1散布ブーム5L及び第2散布ブーム5Rが開いているか又は閉じているかについての情報(ブーム開閉情報)を取得する。次に、ステップS1005に進み、第1散布ブーム5L及び第2散布ブーム5Rが開いていない、すなわち閉じている場合(ステップS1005、No)、制御装置9は、散布ブーム自動上昇制御を実行せず、処理をSTARTに戻し、防除作業機1の旋回及び散布コックの状態を監視しながら、第8制御例を継続する。
【0098】
第1散布ブーム5L及び第2散布ブーム5Rが開いている場合(ステップS1005、Yes)、制御装置9は、処理をステップS1006に進める。ステップS1006において、制御装置9は、防除作業機1の旋回方向を演算し、ステップS1007に進む。ステップS1007からステップS1010は、第3制御例のステップS307からステップS310と同様なので、説明を省略する。
【0099】
第10制御例は、散布ブームが閉じている場合には、散布ブーム自動上昇制御を実行させないので、第1散布ブーム5L及び第2散布ブーム5Rが閉じている場合、これらは閉じた状態のまま維持されて、上昇又は下降しない。このようにすることで、第1散布ブーム5L及び第2散布ブーム5Rが閉じた状態において、これらの昇降動作が規制されるので、例えば、防除作業機1が路上を走行していたり、格納庫内を走行していたりした場合に、第1散布ブーム5L及び第2散布ブーム5Rの上昇又は下降を回避して、安全性を向上させることができる。
【符号の説明】
【0100】
1 防除作業機
1B 車体
2 内燃機関
3FL、3FR 前輪
3RL、3RR 後輪
4 ノズル
5L 第1散布ブーム
5R 第2散布ブーム
5C 第3散布ブーム
6 運転席
7 ハンドル
8 薬剤供給系統
9 制御装置
10 GPS受信部
11 表示・操作パネル
12L 左上下アクチュエータ
12R 右上下アクチュエータ
13L 左開閉アクチュエータ
13R 右開閉アクチュエータ
14 水平バルブ
15L 左伸縮アクチュエータ
15R 右伸縮アクチュエータ
20 タンク
27 ポンプ
30 分岐装置
32L 第1散布コック
32R 第2散布コック
32C 第3散布コック
40 制御用プロセッサ
41 記憶部
42a〜42q 入力インターフェース
43 入出力インターフェース
44a〜44m 出力インターフェース
81 ポンプスイッチ
88、88A 自動リフトスイッチ
88L 第1自動リフトスイッチ
88R 第2自動リフトスイッチ
89 自動水平スイッチ
90 車速センサ
91 操舵角センサ
95 ブームストロークセンサ
96 リンク角速度センサ
97 リンク傾斜センサ
98L ブーム角度左センサ
98R ブーム角度右センサ
99L ブーム開閉左センサ
99R ブーム開閉右センサ
【特許請求の範囲】
【請求項1】
操舵輪と駆動輪とを有する車体と、
圃場に薬剤を散布する複数のノズルが取り付けられるとともに、前記車体の前後方向に対して両側にそれぞれ設けられる一対の散布ブームと、
前記操舵輪が所定角度以上操舵されているときに、前記車体の旋回方向外側に配置されている散布ブームを上昇させる散布ブーム自動上昇制御の実行と非実行とを切り替える自動リフトスイッチと、
前記自動リフトスイッチが前記散布ブーム自動上昇制御を非実行としている場合において、旋回外側の前記散布ブームに設けられた前記ノズルに対する前記薬剤の供給が停止されたときには、旋回外側の前記散布ブームを上昇させる散布制御装置と、
を含むことを特徴とする防除作業機。
【請求項2】
前記散布制御装置は、
旋回外側の前記散布ブームの前記ノズルに前記薬剤の供給が開始されると、旋回外側の前記散布ブームを下降させる請求項1に記載の防除作業機。
【請求項3】
前記散布制御装置は、
前記散布ブーム自動上昇制御を実行可能な状態に前記自動リフトスイッチが切り替わっている場合に前記ノズルに対する前記薬剤の供給が停止されると、前記薬剤の供給が停止されたノズルが設けられている前記散布ブームを上昇させる請求項1又は2に記載の防除作業機。
【請求項4】
前記散布制御装置は、
前記ノズルに対する前記薬剤の供給が開始されると、前記薬剤の供給が開始された前記ノズルが設けられている前記散布ブームを、当該散布ブームが上昇する前の高さまで下降させる請求項3に記載の防除作業機。
【請求項1】
操舵輪と駆動輪とを有する車体と、
圃場に薬剤を散布する複数のノズルが取り付けられるとともに、前記車体の前後方向に対して両側にそれぞれ設けられる一対の散布ブームと、
前記操舵輪が所定角度以上操舵されているときに、前記車体の旋回方向外側に配置されている散布ブームを上昇させる散布ブーム自動上昇制御の実行と非実行とを切り替える自動リフトスイッチと、
前記自動リフトスイッチが前記散布ブーム自動上昇制御を非実行としている場合において、旋回外側の前記散布ブームに設けられた前記ノズルに対する前記薬剤の供給が停止されたときには、旋回外側の前記散布ブームを上昇させる散布制御装置と、
を含むことを特徴とする防除作業機。
【請求項2】
前記散布制御装置は、
旋回外側の前記散布ブームの前記ノズルに前記薬剤の供給が開始されると、旋回外側の前記散布ブームを下降させる請求項1に記載の防除作業機。
【請求項3】
前記散布制御装置は、
前記散布ブーム自動上昇制御を実行可能な状態に前記自動リフトスイッチが切り替わっている場合に前記ノズルに対する前記薬剤の供給が停止されると、前記薬剤の供給が停止されたノズルが設けられている前記散布ブームを上昇させる請求項1又は2に記載の防除作業機。
【請求項4】
前記散布制御装置は、
前記ノズルに対する前記薬剤の供給が開始されると、前記薬剤の供給が開始された前記ノズルが設けられている前記散布ブームを、当該散布ブームが上昇する前の高さまで下降させる請求項3に記載の防除作業機。
【図1】


【図2】

【図3】
【図4】

【図5】

【図6】

【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】

【図17】
【図18】

【図19】
【図20】

【図21】

【図22】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【公開番号】特開2013−27357(P2013−27357A)
【公開日】平成25年2月7日(2013.2.7)
【国際特許分類】
【出願番号】特願2011−165981(P2011−165981)
【出願日】平成23年7月28日(2011.7.28)
【出願人】(000000125)井関農機株式会社 (3,813)
【Fターム(参考)】
【公開日】平成25年2月7日(2013.2.7)
【国際特許分類】
【出願日】平成23年7月28日(2011.7.28)
【出願人】(000000125)井関農機株式会社 (3,813)
【Fターム(参考)】
[ Back to top ]