
除糞用コンベアベルトの監視装置
【課題】ベルトの状況を常に監視して、その監視結果を管理者等に警告する、又は除糞コンベアベルトを停止する養鶏システムにおける養鶏の糞を自動的に除去するための除糞用コンベアベルトを提供する。
【解決手段】各々飼養鶏の排出する糞が通過でき格子状底部を備えたケージ列と、ケージ列の長手方向の下方に沿って設けられ、格子状底部を通過し落下する糞を受け、糞を移動するための除糞用コンベアベルトと、ケージ列の端部からケージ列の長手方向に離隔した位置に設けられた除糞用コンベアベルトの駆動ローラと、駆動ローラとケージ列との間に設けられ、上記除糞用コンベアベルトの緊張度を検出する装置とを有する、除糞用コンベアベルトの監視装置。
【解決手段】各々飼養鶏の排出する糞が通過でき格子状底部を備えたケージ列と、ケージ列の長手方向の下方に沿って設けられ、格子状底部を通過し落下する糞を受け、糞を移動するための除糞用コンベアベルトと、ケージ列の端部からケージ列の長手方向に離隔した位置に設けられた除糞用コンベアベルトの駆動ローラと、駆動ローラとケージ列との間に設けられ、上記除糞用コンベアベルトの緊張度を検出する装置とを有する、除糞用コンベアベルトの監視装置。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は飼養鶏の飼育のために設けられるケージ装置で専ら鶏糞 の搬送に用いられる、無端ベルトから形成される除糞用コンベアベルトに異常が生じていないかを監視する装置に関する。
【背景技術】
【0002】
従来、鶏舎に用いられてきた除糞用コンベアベルトは、その使用につれて除糞用コンベアベルトのたるみが生じ、巻き込み、切断などの事故が生じ易いため、定期的に交換してかかる事故の発生を防止するようにされてきた。なお、除糞用コンベアベルトの構造は例えば特許文献1で開示されている。
【特許文献1】特表平8−506492号公開公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、このように定期的に除糞用コンベアベルトを交換する従来の方式では、例えば異常気象によって気温の高い日が続き、ベルト自体ののびが早まる場合がある。そのような場合には定期的な交換時期を待つ前に、たるみや切断などのトラブルが生じて除糞用コンベアベルトが正常に機能しなくなる危険がある。
【0004】
また、除糞用コンベアベルトのたるみや巻き込み、損傷等は管理者の目視で確認していたためにしばしば、トラブルの発生につながるような除糞用コンベアベルトの異常を見逃す恐れがあった。
【課題を解決するための手段】
【0005】
本発明による除糞用コンベアベルトの監視装置は、各々飼養鶏の排出する糞が通過でき格子状底部を備えたケージ列と、
該ケージ列の長手方向の下方に沿って設けられ、該格子状底部を通過し落下する糞を受け、糞を移動するための除糞用コンベアベルトと、該ケージ列の端部から該ケージ列の長手方向に離隔した位置に設けられた除糞用コンベアベルトの駆動ローラと、該駆動ローラと該ケージ列との間に設けられ、上記除糞用コンベアベルトの緊張度を検出する装置とを有することを特徴としている。
【0006】
また、該ケージ列の長手方向に離隔した位置に設けられた除糞用コンベアベルトの駆動ローラは、除糞用コンベアベルトの一端に設けられ得る。
代りに駆動ローラは、除糞用コンベアベルトの両端に設けることもできる。
【0007】
また、本発明による除糞用コンベアベルトの監視装置においては、上記緊張度を検出する装置は、上記除糞用コンベアベルトを下方に付勢するテンションローラと、該テンションローラの位置を検出する検出装置とを有することを特徴としている。
【0008】
ここでテンションローラは、例えばテンションローラが1つの軸受を備えたアームに取り付けられてスイング動作するように構成することができる。その場合にはテンションローラの上下方向の動きを検出する以外に、テンションローラと共に角度変位する上記アームのスイングの角度を検出するようにすることもできる。
【0009】
さらに、本発明の除糞用コンベアベルトの監視装置においては、上記テンションローラは、除糞用コンベアベルトの戻り側で、ケージ列と駆動ローラとの間に設けられ得る。
【0010】
テンションローラをこのように位置決めすることにより、除糞用コンベアベルト自体が最もたるみやすい位置において、テンションローラを介して除糞用コンベアベルトの緊張度を測定することができ、その除糞用コンベアベルト自体の状態が明確に検出できる。
【0011】
また、本発明の除糞用コンベアベルトの監視装置において、上記緊張度を検出する装置は、該テンションローラの上下動が予め決定した正常範囲内に入っているか、否かを検出するように構成され得る。
【0012】
該テンションローラの上下動を検出する場合、該テンションローラそのものの動きを監視することのみならず、該テンションローラに接続されるアームの上下動またはその上下動に実質的に対応するアームの角度範囲を検出しても良い。
【発明の効果】
【0013】
本発明によると、飼養鶏の糞が格子状底部を通過して除糞用コンベアベルトに載り、除糞用コンベアベルトがケージ列から離れた位置に設けられた駆動ローラによって駆動される。一方、駆動ローラによって駆動された除糞用コンベアベルトは、予め正常であると考えられる緊張度の範囲内で走行する。その緊張度が適正の範囲であるかを、該駆動ローラと該ケージ列との間に設けられた上記緊張度を検出する装置が監視し、適正の範囲を超えた場合、一例としては警報を鳴らすことができる。また、上述の通り緊張度を検出する装置は該駆動ローラと該ケージ列との間に設けられているために、ケージ列内の飼養鶏から排出される糞が緊張度を検出する装置に当たり難い配置としている。その結果として、糞による検出不良が生じにくい効果が奏される。
【0014】
ここで、除糞用コンベアベルトは、搬送する物体が粘着質の糞であるために、その粘着によって上記駆動ローラが上記除糞用コンベアベルトを巻き込むことが多々あった。そして、巻き込みが生じた場合は、除糞用コンベアベルトの緊張度は大幅に大きくなり、緊張度を検出する装置が作動し、直ちに例えば警報を鳴らすことができ、好ましくは駆動ローラに回転力を与える駆動装置を停止させる制御を行うことができる。
【0015】
一方、除糞用コンベアベルトが切断、たるみが生じた場合であっても同様に警報を鳴らして例えば管理者に知らせることができる。
さらに、本発明による除糞用コンベアベルトの監視装置は、上記緊張度を検出する装置が、上記除糞用コンベアベルトを下方に付勢するテンションローラと、該テンションローラの位置を検出する検出装置とを有することを特徴としている。
上記テンションローラによって上記除糞用コンベアベルトを下方に付勢することにより、上記除糞用コンベアベルトに対して負荷を与えつつ、上記除糞用コンベアベルトの延び、縮み、巻き込みまたは切断された状態を明確に検出することができる。また、上記テンションローラは、除糞用コンベアベルトのたるみ分を吸収することができるため、ケージ内を通過する除糞用コンベアベルトのたるみを、その除糞用コンベアベルトが利用可能な限り是正しつつ利用する。即ち、経時変化が生じても可能な限り利用し、しかしながら、たるみが予定以上に生じたことを検出した時点で、除糞用コンベアベルトの交換を促す警報等の動作が行われる。従って、本発明を利用すると、徐々に傷みが進む一般的な経時変化に対しても、その経時変化で生じる伸びや縮みを是正しつつ正常走行で稼働し、上述の通り限界に達した時点で速やかに交換を促す警告がなされる。従って、事故が生じる前に除糞用コンベアベルトの交換が促されるために、被害を最小に抑えることができる。なお、本発明においては、除糞用コンベアベルトが突然切断した場合も除糞用コンベアベルトの交換を促す警報等の動作が行われる。また、所望に応じて除糞用コンベアベルトの走行を停止させることができる。
【0016】
さらに、本発明による除糞用コンベアベルトの監視装置は、上記テンションローラの設置位置が、除糞用コンベアベルトの戻り側で、ケージ列と駆動ローラとの間としたことを特徴としている。
上記設置位置は、除糞用コンベアベルト自体が最もたるみが出る位置であるために、同位置において、テンションローラを介して除糞用コンベアベルトの緊張度を測定することは、その除糞用コンベアベルト自体の状態がさらに明確に検出できる。また、ケージ列から離間していることにより、テンションローラが汚れ難く、安定した測定が確保できる。
さらに、本発明による除糞用コンベアベルトの監視装置は、上記緊張度を検出する装置が、該テンションローラの上下動が予め決定した正常範囲内に入っているか、否かを検出するようにしたことを特徴としている。
従って、上記正常範囲に入っているか否かを検出して、正常か異常かの2現象を監視する単純構成であるにもかかわらず、除糞用コンベアベルトの切断、伸び、縮みおよび巻き込みが生じたことを検出することがでる。従って、単純でしかも除糞用コンベアベルトにおいて監視したい代表的な現象を満たすために、無駄が少なく、しかもより確からしい監視が可能となる。
【発明を実施するための最良の形態】
【0017】
[実施例1]
以下、本発明の実施例を、添付図面に基づいて説明する。
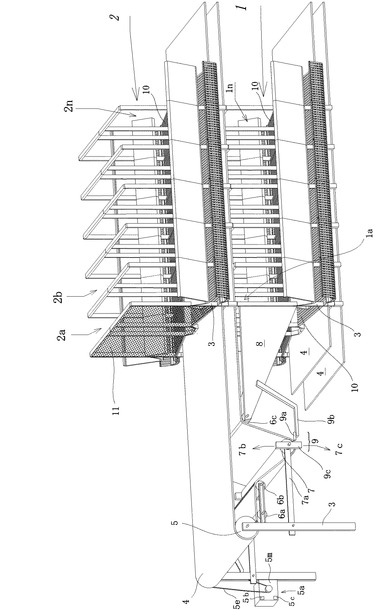
図1は除糞用コンベアベルトの監視装置を備えたケージ列を示した斜視図である。図示例ではケージ列は2段構成であるが、所望に応じケージ列を1段または3段以上に構成してもよい。
図中において、1は1段目のケージ列、2は二段目のケージ列、3はケージ用支柱、4は除糞用コンベアベルト、5は駆動ローラ、6a、6b、6cは案内ローラ、7はテンションローラ、7aはテンションローラ7をスイング支持するための回動アーム、8はケージ用支柱3に取り付けられ該案内ローラ6cを把持する支持体、9は緊張度を検出する装置、10は格子状底部、および11はケージ列の周囲に設けられる網の一部を示す。また各段のケージの外周およびケージ間に設ける仕切りは、省略しているが、符号11で示したような網で構成される。
【0018】
以下、本発明の除糞用コンベアベルトの監視装置を、第2段目のケージ列2に取り付けた図示例について説明する。
【0019】
飼養鶏が納められるケージ1a〜1n、2a〜2nはそれぞれ1階、2階に設けられ、各々のケージはケージ用支柱3によって支持されて連続的に配置され、ケージ列1、2を形成している。各ケージ列1、2の下方には、飼養鶏の糞が通過できる格子状底部10が張設される。
【0020】
この格子状底部10と下段のケージ列の天面(1階のケージ列1に応用した場合には床面となる)との間の隙間には除糞用コンベアベルト4が張設される。また、各ケージ列の右側すなわちケージ2nの右側には、図示していない案内ローラが設けられている。
【0021】
一方、ケージ列は、1階がケージ1aの左側、2階がケージ2aの各々の左側で終端し、これらケージ列の終端から更に左側へ除糞用コンベアベルト4は伸びる。除糞用コンベアベルト4は駆動ローラ5で折り返す。除糞用コンベアベルト4の駆動ローラ5と、上記ケージ列の左端部すなわちケージ2aとの間には除糞用コンベアベルト4の緊張度を検出する装置9が設けられる。
【0022】
また、除糞用コンベアベルト4の駆動ローラ側の端部には、該駆動ローラ5に回転力を与えるための駆動源5aが設けられモータ5mおよび駆動ベルト5eから構成されている。駆動ローラ5および駆動源5aは支柱3によって支持されている。
【0023】
次に緊張度を検出する装置について説明する。除糞用コンベアベルト4の緊張度を測定するために、除糞用コンベアベルト4を下方に付勢するテンションローラ7を設けた。該テンションローラ7はケージ列2の左側端部と除糞用コンベアベルト4の戻り側に設けられる。なお、除糞用コンベアベルト4の戻り側とは、すなわち下側の除糞用コンベアベルトである。
【0024】
具体的には図示したようにテンションローラ7は案内ローラ6bと、案内ローラ6cとの間に位置している。駆動ローラ5に隣接して設けられた案内ローラ6aは、駆動ローラ5で生じる様々な力の変動を吸収し、それによりコンベアベルト4の安定走行を保証している。
【0025】
このように配置されたテンションローラ7は除糞用コンベアベルト4の緊張度が高くなると、上昇し(矢印7b方向)、緊張度が緩むと下降する(矢印7c方向)。そして、テンションローラ7の上昇と下降によって、ケージ列の下側を走行する除糞用コンベアベルト4の張りは常に一定に維持される。このように除糞用コンベアベルト4の張りを適切に保ち、垂れないように維持することにより、その除糞用コンベアベルト4は、その階下に位置するケージ列の天井部分から予定の間隔離れて走行することになり、その結果下階のケージ列内で飼養されている鶏が除糞用コンベアベルト4を啄むことができない。このことは、コンベアベルト4の損傷を防止できるだけでなく、コンベアベルト4上に付着した糞を飼養鶏が啄むことにより伝染する病気の広がりを極力抑えることができることを意味している。
【0026】
上述のテンションローラ7は、気温の変化、鶏糞の載積量の変化およびコンベアベルト4の経時変化に対して上昇下降の動作が連続的に繰り返される。その激しい動きに対して、長時間安定した動作を保証するために、上昇下降の動作を案内し、且つ不要な水平方向の動きや共鳴振動などが生じないようにする案内構造が必要となる。
【0027】
そこで同実施例においては上記案内構造中の一つの構造である回動アーム7aを利用した構造を採用した。この回動アーム7aは駆動ローラ5を支える支柱3からテンションローラ7の軸に達する長さを有する棒状の部材から成り、該支柱3の中間位置を中心として回動するよう回動アーム7aが支柱3に軸支される。該回動アーム7aの他端にはテンションローラ7が回転自在に取り付けられる。こうすることにより、該テンションローラ7が上記支柱3の中間位置を中心とした回転軌道上で左右方向が規制され、しかも該テンションローラ7の動きに従って、上昇下降の運動は自由に行われる。また、この回動アーム7aのテンションローラ7側端部には、そのテンションローラ7の回転軸を通過する位置で上下方向に長い反射板9cが回動アーム7aに対して直行するように固着される。該反射板9cは全体として予め調節した長さを備えた四角柱から成る反射性の部材であり、表面全体が光の反射に富む材料で形成されている。
【0028】
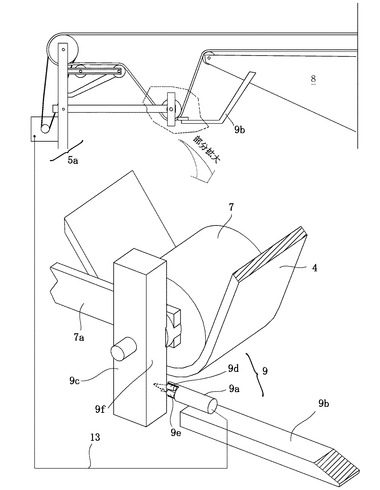
図2はケージ列の終端部から駆動ローラ側を描いた側面図と、該側面図中において点線で囲って示した部分を拡大した斜視図とを組み合わせた図面である。同図を参照しつつ反射板9cと光学的なセンサー9aとの関係について説明する。該センサー9aは、ケージ列1の支柱からテンションローラ7側に向かって伸びる支持体8にセンサー支持体9bを介して取り付けられる。該センサー9aは、発光装置9dと受光装置9eとを備えた装置で、該発光装置9dの発する光は該反射板9cの反射面9fに到達すると反射して受光装置9eに向かって戻り、即ち受光装置9eがその光を感知する。受光装置9eが発光装置9dからの光を感知している間はテンションローラ7の高さが正常の範囲であると判断させ、その結果として警告動作は行わない。
【0029】
ところで、同図ではテンションローラ7がやや上昇した状態を示している。その後、鶏舎内の気温が著しく低下したと想定した場合、コンベアベルト4自体の温度も著しく冷えるとともに著しく収縮する。その収縮した長さに対応してテンションローラ7が上昇し、テンションローラ7と同期して上下する該反射板9cの反射面9fも著しく上昇する。そのことから発光装置9dの光は該反射板9cの下を通過して自由空間に放出され、該受光装置9eに光は到達しなくなる。ところで、該受光装置9eは制御装置(図示せず)に接続され、発光装置9dからの光を受光するか否かを監視する。そして、発光装置9dからの光を受光しなくなると、その結果に対応して制御装置が、警告ランプを点灯させて管理者に警告を促す。
【0030】
次に、気温が著しく上昇した場合を想定すると、
コンベアベルト4自体の温度も著しく上昇すると共に著しく伸びる。その伸びた長さに対応してテンションローラ7が下降し、テンションローラ7と同期して上下する該反射板9cの反射面9fも著しく下降する。そのことから発光装置9dの光は該反射板9cの上を通過して自由空間に放出され、該受光装置9eに光は到達しなくなる。その結果に対応して制御装置が警告ランプを点灯させ、管理者はその点灯を知見することにより警告状態にあることが判る。
【0031】
なお、所望に応じて制御装置が、警告ランプを点灯させると同時に、該駆動ローラ5に回転力を与えるための駆動源5aへの電源供給を遮断するように制御がなされ得る。例えば、受光装置9eが発光装置9dからの光を受光すると受光装置9eは微弱な電圧を発生する。この電圧の有無に応じて前記駆動源5aへの電源供給を同期させる。このようにすると、受光装置9eが発光装置9dからの光を受光しつづけている間は、自動的に前記駆動源5aへの電源供給がなされて駆動ローラ5が回転駆動し、除糞用コンベアベルト4が稼働状態となる。
【0032】
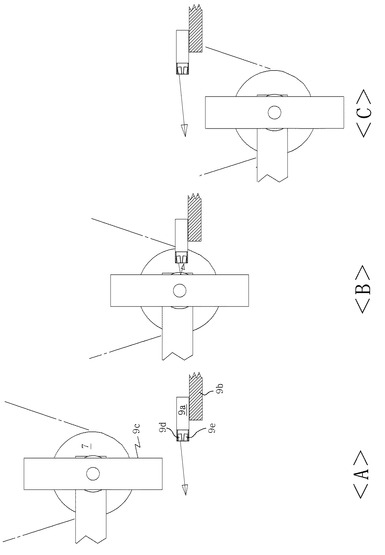
図3を参照して、具体的な検出例を説明する。同図は光学センサー9a(固定側)と、反射板9c(可動側)との相対的な関係を3種描いた説明図である。また、実施例1で説明したように、テンションローラ7と反射板9cとは同期して上昇下降を行う。
図中において、<A>は固定している光学センサー9aに対して、反射板9cが上側にずれることにより光学センサー9aの反応が、正常から異常に変化する。
同様に、<C>は固定している光学センサー9aに対して、反射板9cが下側にずれることにより光学センサー9aの反応が、正常から異常へと変化する。
一方、<B>は反射板9cが多少上下に揺動するものの反射板が光学センサー9a前に常に位置している状態を示し、その結果として光学センサー9aの反応は正常のまま変化しない。
以上説明してきたように、光学センサー9aと変動する反射板9cとの位置関係により、光学センサー9aで得られる検出結果は正常か否かの2通りの結果が得られる。
【0033】
次に、以上のように構成された光学センサー9aで検出される具体的な故障例を以下に説明する。
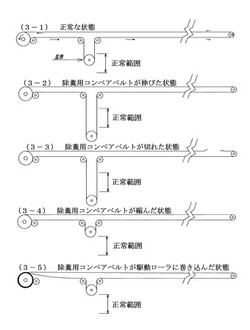
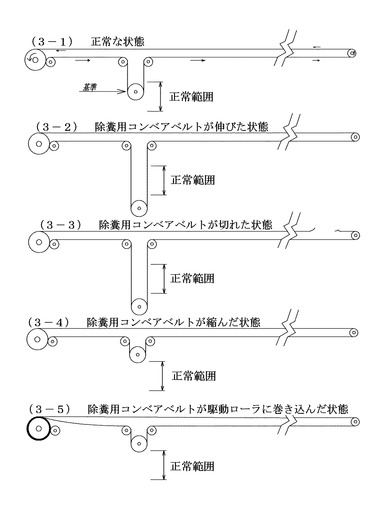
図4は、除糞用コンベアベルトの正常な状態の一例と、異常な状態の4種類の例を1つの図面上に列記した説明図である。図中において、
(3−1)は除糞用コンベアベルトが正常な状態である様子を示し、光学センサー9aと反射板9cとの相対的な関係は前述の<B>に対応する。
(3−2)は除糞用コンベアベルトが伸びた場合の例を示し、光学センサー9aと反射板9cとの相対的な関係は前述の<C>に対応する。
(3−3)は除糞用コンベアベルトが切れた場合の例を示し、光学センサー9aと反射板9cとの相対的な関係は前述の<C>に対応する。
(3−4)は除糞用コンベアベルトが縮んだ場合の例を示し、光学センサー9aと反射板9cとの相対的な関係は前述の<A>に対応する。
(3−5)は除糞用コンベアベルトが駆動ローラに巻き込まれた場合を示し、光学センサー9aと反射板9cとの相対的な関係は前述の<A>に対応する。
以上のように除糞用コンベアベルトにおける異常な状態(3−2)乃至(3−5)に対して、光学センサー9aと反射板9cとの相対的な関係は前述の<A>もしくは<C>の何れかに対応する。
従って、光学センサー9aと反射板9cとの相対的な関係が<A>もしくは<C>になるか否かを監視すること、言い換えると<B>の正常な状態から外れるか否かを監視することで、除糞用コンベアベルトにおける4種類の異常な状態に至っているか否かを監視することができる。
この監視結果に基づいて、前記駆動源5aを停止させることで、除糞用コンベアベルトの走行を停止させ、好ましくは走行停止と同時に警告ブザー、あるいは警告ランプを作動させることで、管理者が除糞用コンベアベルトの走行停止をいち早く認知することが可能となる。
【0034】
[実施例2]
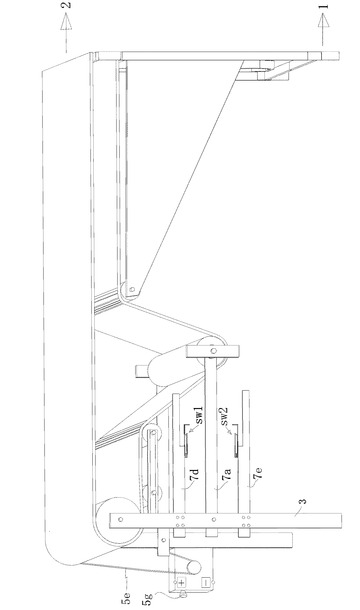
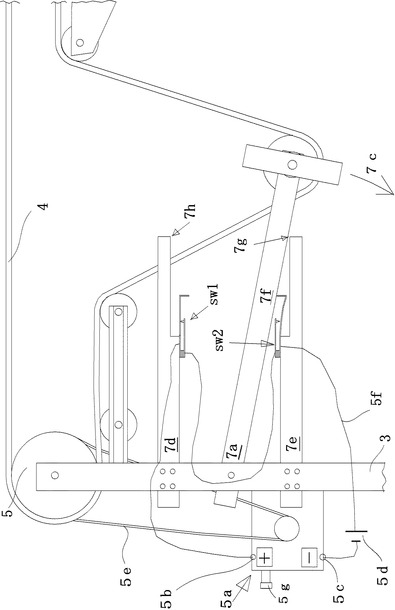
図5は本発明の実施例2を示す部分拡大斜視図であり、図6はテンションローラ7が下がった状態における部分拡大側面図である。これら図面を参照して、実施例2の詳細を説明する。なお、実施例2は、実施例1に部分変更した実施例であり、同一部分は同一符号を付し、また実施例1と同一箇所の説明は省略した。
図中において、7dは上側の片持梁、7eは下側の片持梁、sw1は上側のスイッチ、sw2は下側のスイッチである。これら構成部品が実施例2で新たに追加されたものである。一方、実施例1から削除された主部品は、光学センサー9aとセンサー支持体9bである。
【0035】
片持梁7d、7eは、支柱3に対して回動アーム7aを挟むように固定され、上側の片持梁7dには上側のスイッチsw1が、下側の片持梁7eには下側のスイッチsw2が各々取り付けられる。また、片持梁7d、7eの中間位置にはスイッチの動きに合わせて先細りに成形され、その先端部分7gは、テンションローラ7を支える回動アーム7aと当たり、上下動するテンションローラ7の下方の限界を形成している。また、回動アーム7aが上記先端部分7gに当たった状態で、スイッチsw2の先端側が回動アーム7aと当たり、その結果から、スイッチsw2は閉状態から開状態へと変化する。
【0036】
回動アーム7aより上側に片持梁7dが4本のボルトによって支柱3に固着され、該片持梁7dの中間位置にはスイッチsw1が設けられ、該片持梁7dの先端側は先細りに成形されている。また、該片持梁7dの先端部分7hは、テンションローラ7を支える回動アーム7aと当たり、上下動するテンションローラ7の上方の限界を形成している。また、回動アーム7aが上記先端部分7hに当たった状態において、スイッチsw1の動作を見ると、スイッチsw1の延長部が回動アーム7aの中間部分7fに押されて弓なりに反る。その形状の変形によって、スイッチsw1は閉状態から開状態へと変化する。一方、片持梁7eが支柱3に4本のボルトによって取り付けられる。この取り付け位置は、図6でわかるように、回動アーム7aの回動中心位置と片持梁7dの取り付け位置との同距離分だけ、回動アーム7aの回動中心位置から下側に離れた位置に取り付けられている。また、片持梁7dと片持梁7eとは平行に設置される。以上の位置関係で支柱3に設置された片持梁7eは、中間位置にsw2が上側に沿って取り付けられ、さらに片持梁7eの先端は細く成形されている。さて、図6は回動アーム7aが時計回りに回転した様子を示し、回転したアーム7aは片持梁7eの先端部分7gに当たって止まる。また、この状態において、回動アーム7aの中間部分7fがスイッチsw2の延長部と当たって弓なりに変形させる。この変形によってsw2は閉状態から開状態へと変わる。また、回動アーム7aが片持梁7eと当たると、時計回りへの回動の限界になる。即ち、除糞用コンベアベルト4はこれ以上伸びた場合でも、回動アーム7aは上記限界で留まる。
【0037】
次に、駆動源の動作に関連した回路構成を説明する。次の順に直列回路が構成される。即ち、駆動源5aのプラス側のターミナル5b、上側のスイッチsw1、下側スイッチsw2、電源5d、および駆動源5aのマイナス側のターミナル5cが直列に結線される。一方、駆動源5aには回転再開を可能とするリセットボタン5gを装備している。なお、上記結線に用いた導線5fは外周が絶縁体で被覆されている。
【0038】
このように構成された実施例2の動作について説明する。図6は除糞用コンベアベルト4が正常な範囲を超えて伸びた状態を示し、テンションローラ7は除糞用コンベアベルト4の緊張が少なくなったために、下方の限界まで下がっている。即ち、テンションローラ7を支える回動アーム7aと片持梁7eの先端部分7gとが当たる状態となる。また、ほぼ同時に片持梁7eの中間位置に設置したスイッチsw2の延長部が回動アーム7aの中間部分7fに押されて弓なりに変形し、その結果、スイッチsw2が閉状態から開状態へと変わる。スイッチsw2が開状態となると、直列接続された電源5dからの電気は途絶え、駆動源5aは停止する。
【0039】
なお、除糞用コンベアベルト4が正常の範囲を超えて縮んだ場合(あるいは駆動ロータが除糞用コンベアベルト4を巻き込んだ場合)では、テンションローラ7は上昇し、テンションローラ7と連動する回動アーム7aが片持梁7dの先端部7hに当たって停止すると同時にスイッチsw1の延長部が回動アーム7aの中間部分7fに当たり、スイッチsw1が閉状態から開状態へと変わる。その結果としてスイッチsw1が直列接続された電源5dからの通電を停止させるために、駆動源5aは停止する。
【0040】
このように、除糞用コンベアベルト4の緊張状態が大きく変化すると、除糞用コンベアベルト4を走行させるための駆動源が自動停止することで、そのまま運転を続けた場合に生じるベルトの切断やベルトとロータとの摩擦から生じる異臭の発生などを未然に防ぐことができる。
【0041】
なお、止まった原因は管理者によって是正され、その後再開する場合は、駆動装置5aに設けられたリセットボタン5gを押すことによって、駆動装置5aを再び作動開始させることができる。
【0042】
以上実施例1ならびに実施例2は、何れも2階のケージ列内に飼養される鶏の糞を処理するための、除糞用コンベアベルト4に対して本発明の構成を適用したものであるが、同一の構成を1階のケージ列1における除糞用コンベアベルトに対して利用した場合について説明する。テンションローラが上記実施例と同様に設けられると1階の除糞用コンベアベルトの張りを適切に保ち、垂れないように維持することにより、その1階の除糞用コンベアベルトは、そのケージ列の設置している床面から予定の間隔離れて走行することになり、その結果、1階の除糞用コンベアベルトが許容できる範囲で緩んだとしても、テンションローラによって、垂れさがらずにすみ、床面との接触も回避できる。即ち、床面と除糞用コンベアベルトとの距離が確保される。もし、このテンションローラを含めて本発明の監視装置を用いない場合、除糞用コンベアベルトが伸びるとともに、徐々に床に近づき最終的に床を擦って除糞用コンベアベルトが走行するようになる。その結果として、除糞用コンベアベルトの外表面に傷が付きその利用期間が短くなる。また、床の汚れが除糞用コンベアベルトに付着する。さらに、床と除糞用コンベアベルトとの接触面積が大きくなると、負荷が大きくなりすぎて、除糞用コンベアベルトの走行が困難になり、除糞を行う能力を失う。または駆動ローラとコンベアベルトとの接触面が摩擦熱で過熱して異臭を放つなどの問題が生じる。
【0043】
一方、上記実施例において、テンションローラ7は、下側を走行する除糞用コンベアベルトを下方に付勢するように構成しているが、必要に応じて、上側を走行する除糞用コンベアベルトをバネ等の力によって、上方に付勢するように構成することも可能である。
【0044】
以上のように構成した本発明は、例えば、冬期において、気温低下が著しい環境下においは、除糞用コンベアベルトが縮み、除糞用コンベアベルトの張りが強くなる。そして、緊張度が許容値を越えると、監視装置が作動して、例えば警報を鳴らすことができる。そして、管理者は除糞用コンベアベルトの緊張度を是正すべく、各部の調整をするか、除糞用コンベアベルトを新しい柔軟なものに取り替える処置を行うことができる。
【0045】
このように監視装置によって早期に処置を行うことによって、除糞用コンベアベルトが切断に至ることを未然に防ぐことができる。
【0046】
一方、不慮の事故により、この除糞用コンベアベルトが切断した場合、一気に除糞用コンベアベルトの緊張度は無くなり、支えの無い場所では下方に垂れ下がる。また、除糞用コンベアベルトに走行駆動力を与えている駆動ローラが停止せずに回転し続けると、駆動ローラが停止している除糞用コンベアベルトの一カ所に当たり続けるため、摩擦熱が発生して異臭を発生させる可能性がある。本発明では、除糞用コンベアベルトの伸びや縮みを検出しつつ、このような切断に至る前に除糞用コンベアベルトを取り替えることを一つの目的としているが、取り換え時期に至らないと判断している状態であっても、不慮の事故で突然切断に至る場合は避けられない。また、突然の切断に至った場合であっても、本発明の除糞用コンベアベルトの監視装置は管理者等に警告すること、あるいは、除糞用コンベアベルトを停止させる等の制御が行われ、放置した場合における上述の問題を回避することが可能となる。
また、ケージ列が上下方向に連続する多段ゲージで利用した場合、多段ゲージ特有の問題を回避することが可能である。即ち、除糞用コンベアベルトが伸びて全体的に緊張度が足りなくなってきた場合、本発明を利用しない場合、階下に位置するケージ列の天井付近まで除糞用コンベアベルトは下がる。その結果、その階下に位置するケージ列内で飼養される鶏が天井の網越しに該除糞用コンベアベルトを啄み、コンベアベルトに傷を付けたり、あるいは、糞を媒介した伝染病が増加する危険が増加する。また、1階に設置されている除糞用コンベアベルトが伸びた場合、鶏舎の床と接触しつつ走行する場合があり、このような接触があると、除糞用コンベアベルトが傷つき、取り換え時期を早める必要があるが、本発明を利用することで、この接触を未然に回避することが可能となる。
【0047】
また、経年変化または温度上昇により、除糞用コンベアベルトが伸びて、下方に下がり、その結果として上記同様に階下に位置するケージ列内で飼養される鶏が下方に接近してきた除糞用コンベアベルトを天井の網越しについばみ、同理由で病気が増加する可能性がある。
本発明の、除糞用コンベアベルトの監視装置の作動により、警告を管理者が受けた場合、あるいは除糞用コンベアベルトが停止した場合、管理者は新しい除糞用コンベアベルトに取り替えることを検討する。あるいは、状況によっては、除糞用コンベアベルトの走行系の調節をし直すことによって、たるみや縮みを解消することが可能である。また、糞の影響を受けにくいように、緊張度を検出する装置をケージ列から離間させたことにより、上述の監視が適切に行われ得る構成を備えている。
【産業上の利用可能性】
【0048】
以上の実施例では、飼養鶏中心に説明してきたが、必ずしも飼養鶏に限定するものでは無く、格子状底部の上で飼養できる動物における畜舎に対して本発明は利用可能である。
【図面の簡単な説明】
【0049】
【図1】図1は除糞用コンベアベルトの監視装置を備えたケージ列を示した説明用斜視図である。
【図2】図2はケージ列の終端部から駆動ローラ側を描いた側面図と、該側面図中において点線で囲って示した部分を拡大した斜視図とを組み合わせた図面である。
【図3】図3は光学センサー(固定側)と、反射板(可動側)との相対的な関係を3種描いた説明図である。
【図4】図3は、除糞用コンベアベルトの正常な状態の一例と、異常な状態の4種類の例を1つの図面上に列記した説明図である。
【図5】図5は本発明の実施例2を示す部分拡大斜視図である。
【図6】図6は実施例2の部分拡大側面図である。
【符号の説明】
【0050】
1…1段目のケージ列
2…二段目のケージ列
3…支柱
4…除糞用コンベアベルト
5…駆動ローラ
5a…駆動源
5b…プラス側のターミナル
5c…マイナス側のターミナル
5d…電源
5m…モータ
6a、6b、6c…案内ローラ
7…テンションローラ
7a…回動アーム
8…支持体
9…緊張度を検出する装置
10…格子状底部
11…網の一部
7d…上側の片持梁
7e…下側の片持梁
sw1…上側のスイッチ
sw2…下側のスイッチ
【技術分野】
【0001】
本発明は飼養鶏の飼育のために設けられるケージ装置で専ら鶏糞 の搬送に用いられる、無端ベルトから形成される除糞用コンベアベルトに異常が生じていないかを監視する装置に関する。
【背景技術】
【0002】
従来、鶏舎に用いられてきた除糞用コンベアベルトは、その使用につれて除糞用コンベアベルトのたるみが生じ、巻き込み、切断などの事故が生じ易いため、定期的に交換してかかる事故の発生を防止するようにされてきた。なお、除糞用コンベアベルトの構造は例えば特許文献1で開示されている。
【特許文献1】特表平8−506492号公開公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、このように定期的に除糞用コンベアベルトを交換する従来の方式では、例えば異常気象によって気温の高い日が続き、ベルト自体ののびが早まる場合がある。そのような場合には定期的な交換時期を待つ前に、たるみや切断などのトラブルが生じて除糞用コンベアベルトが正常に機能しなくなる危険がある。
【0004】
また、除糞用コンベアベルトのたるみや巻き込み、損傷等は管理者の目視で確認していたためにしばしば、トラブルの発生につながるような除糞用コンベアベルトの異常を見逃す恐れがあった。
【課題を解決するための手段】
【0005】
本発明による除糞用コンベアベルトの監視装置は、各々飼養鶏の排出する糞が通過でき格子状底部を備えたケージ列と、
該ケージ列の長手方向の下方に沿って設けられ、該格子状底部を通過し落下する糞を受け、糞を移動するための除糞用コンベアベルトと、該ケージ列の端部から該ケージ列の長手方向に離隔した位置に設けられた除糞用コンベアベルトの駆動ローラと、該駆動ローラと該ケージ列との間に設けられ、上記除糞用コンベアベルトの緊張度を検出する装置とを有することを特徴としている。
【0006】
また、該ケージ列の長手方向に離隔した位置に設けられた除糞用コンベアベルトの駆動ローラは、除糞用コンベアベルトの一端に設けられ得る。
代りに駆動ローラは、除糞用コンベアベルトの両端に設けることもできる。
【0007】
また、本発明による除糞用コンベアベルトの監視装置においては、上記緊張度を検出する装置は、上記除糞用コンベアベルトを下方に付勢するテンションローラと、該テンションローラの位置を検出する検出装置とを有することを特徴としている。
【0008】
ここでテンションローラは、例えばテンションローラが1つの軸受を備えたアームに取り付けられてスイング動作するように構成することができる。その場合にはテンションローラの上下方向の動きを検出する以外に、テンションローラと共に角度変位する上記アームのスイングの角度を検出するようにすることもできる。
【0009】
さらに、本発明の除糞用コンベアベルトの監視装置においては、上記テンションローラは、除糞用コンベアベルトの戻り側で、ケージ列と駆動ローラとの間に設けられ得る。
【0010】
テンションローラをこのように位置決めすることにより、除糞用コンベアベルト自体が最もたるみやすい位置において、テンションローラを介して除糞用コンベアベルトの緊張度を測定することができ、その除糞用コンベアベルト自体の状態が明確に検出できる。
【0011】
また、本発明の除糞用コンベアベルトの監視装置において、上記緊張度を検出する装置は、該テンションローラの上下動が予め決定した正常範囲内に入っているか、否かを検出するように構成され得る。
【0012】
該テンションローラの上下動を検出する場合、該テンションローラそのものの動きを監視することのみならず、該テンションローラに接続されるアームの上下動またはその上下動に実質的に対応するアームの角度範囲を検出しても良い。
【発明の効果】
【0013】
本発明によると、飼養鶏の糞が格子状底部を通過して除糞用コンベアベルトに載り、除糞用コンベアベルトがケージ列から離れた位置に設けられた駆動ローラによって駆動される。一方、駆動ローラによって駆動された除糞用コンベアベルトは、予め正常であると考えられる緊張度の範囲内で走行する。その緊張度が適正の範囲であるかを、該駆動ローラと該ケージ列との間に設けられた上記緊張度を検出する装置が監視し、適正の範囲を超えた場合、一例としては警報を鳴らすことができる。また、上述の通り緊張度を検出する装置は該駆動ローラと該ケージ列との間に設けられているために、ケージ列内の飼養鶏から排出される糞が緊張度を検出する装置に当たり難い配置としている。その結果として、糞による検出不良が生じにくい効果が奏される。
【0014】
ここで、除糞用コンベアベルトは、搬送する物体が粘着質の糞であるために、その粘着によって上記駆動ローラが上記除糞用コンベアベルトを巻き込むことが多々あった。そして、巻き込みが生じた場合は、除糞用コンベアベルトの緊張度は大幅に大きくなり、緊張度を検出する装置が作動し、直ちに例えば警報を鳴らすことができ、好ましくは駆動ローラに回転力を与える駆動装置を停止させる制御を行うことができる。
【0015】
一方、除糞用コンベアベルトが切断、たるみが生じた場合であっても同様に警報を鳴らして例えば管理者に知らせることができる。
さらに、本発明による除糞用コンベアベルトの監視装置は、上記緊張度を検出する装置が、上記除糞用コンベアベルトを下方に付勢するテンションローラと、該テンションローラの位置を検出する検出装置とを有することを特徴としている。
上記テンションローラによって上記除糞用コンベアベルトを下方に付勢することにより、上記除糞用コンベアベルトに対して負荷を与えつつ、上記除糞用コンベアベルトの延び、縮み、巻き込みまたは切断された状態を明確に検出することができる。また、上記テンションローラは、除糞用コンベアベルトのたるみ分を吸収することができるため、ケージ内を通過する除糞用コンベアベルトのたるみを、その除糞用コンベアベルトが利用可能な限り是正しつつ利用する。即ち、経時変化が生じても可能な限り利用し、しかしながら、たるみが予定以上に生じたことを検出した時点で、除糞用コンベアベルトの交換を促す警報等の動作が行われる。従って、本発明を利用すると、徐々に傷みが進む一般的な経時変化に対しても、その経時変化で生じる伸びや縮みを是正しつつ正常走行で稼働し、上述の通り限界に達した時点で速やかに交換を促す警告がなされる。従って、事故が生じる前に除糞用コンベアベルトの交換が促されるために、被害を最小に抑えることができる。なお、本発明においては、除糞用コンベアベルトが突然切断した場合も除糞用コンベアベルトの交換を促す警報等の動作が行われる。また、所望に応じて除糞用コンベアベルトの走行を停止させることができる。
【0016】
さらに、本発明による除糞用コンベアベルトの監視装置は、上記テンションローラの設置位置が、除糞用コンベアベルトの戻り側で、ケージ列と駆動ローラとの間としたことを特徴としている。
上記設置位置は、除糞用コンベアベルト自体が最もたるみが出る位置であるために、同位置において、テンションローラを介して除糞用コンベアベルトの緊張度を測定することは、その除糞用コンベアベルト自体の状態がさらに明確に検出できる。また、ケージ列から離間していることにより、テンションローラが汚れ難く、安定した測定が確保できる。
さらに、本発明による除糞用コンベアベルトの監視装置は、上記緊張度を検出する装置が、該テンションローラの上下動が予め決定した正常範囲内に入っているか、否かを検出するようにしたことを特徴としている。
従って、上記正常範囲に入っているか否かを検出して、正常か異常かの2現象を監視する単純構成であるにもかかわらず、除糞用コンベアベルトの切断、伸び、縮みおよび巻き込みが生じたことを検出することがでる。従って、単純でしかも除糞用コンベアベルトにおいて監視したい代表的な現象を満たすために、無駄が少なく、しかもより確からしい監視が可能となる。
【発明を実施するための最良の形態】
【0017】
[実施例1]
以下、本発明の実施例を、添付図面に基づいて説明する。
図1は除糞用コンベアベルトの監視装置を備えたケージ列を示した斜視図である。図示例ではケージ列は2段構成であるが、所望に応じケージ列を1段または3段以上に構成してもよい。
図中において、1は1段目のケージ列、2は二段目のケージ列、3はケージ用支柱、4は除糞用コンベアベルト、5は駆動ローラ、6a、6b、6cは案内ローラ、7はテンションローラ、7aはテンションローラ7をスイング支持するための回動アーム、8はケージ用支柱3に取り付けられ該案内ローラ6cを把持する支持体、9は緊張度を検出する装置、10は格子状底部、および11はケージ列の周囲に設けられる網の一部を示す。また各段のケージの外周およびケージ間に設ける仕切りは、省略しているが、符号11で示したような網で構成される。
【0018】
以下、本発明の除糞用コンベアベルトの監視装置を、第2段目のケージ列2に取り付けた図示例について説明する。
【0019】
飼養鶏が納められるケージ1a〜1n、2a〜2nはそれぞれ1階、2階に設けられ、各々のケージはケージ用支柱3によって支持されて連続的に配置され、ケージ列1、2を形成している。各ケージ列1、2の下方には、飼養鶏の糞が通過できる格子状底部10が張設される。
【0020】
この格子状底部10と下段のケージ列の天面(1階のケージ列1に応用した場合には床面となる)との間の隙間には除糞用コンベアベルト4が張設される。また、各ケージ列の右側すなわちケージ2nの右側には、図示していない案内ローラが設けられている。
【0021】
一方、ケージ列は、1階がケージ1aの左側、2階がケージ2aの各々の左側で終端し、これらケージ列の終端から更に左側へ除糞用コンベアベルト4は伸びる。除糞用コンベアベルト4は駆動ローラ5で折り返す。除糞用コンベアベルト4の駆動ローラ5と、上記ケージ列の左端部すなわちケージ2aとの間には除糞用コンベアベルト4の緊張度を検出する装置9が設けられる。
【0022】
また、除糞用コンベアベルト4の駆動ローラ側の端部には、該駆動ローラ5に回転力を与えるための駆動源5aが設けられモータ5mおよび駆動ベルト5eから構成されている。駆動ローラ5および駆動源5aは支柱3によって支持されている。
【0023】
次に緊張度を検出する装置について説明する。除糞用コンベアベルト4の緊張度を測定するために、除糞用コンベアベルト4を下方に付勢するテンションローラ7を設けた。該テンションローラ7はケージ列2の左側端部と除糞用コンベアベルト4の戻り側に設けられる。なお、除糞用コンベアベルト4の戻り側とは、すなわち下側の除糞用コンベアベルトである。
【0024】
具体的には図示したようにテンションローラ7は案内ローラ6bと、案内ローラ6cとの間に位置している。駆動ローラ5に隣接して設けられた案内ローラ6aは、駆動ローラ5で生じる様々な力の変動を吸収し、それによりコンベアベルト4の安定走行を保証している。
【0025】
このように配置されたテンションローラ7は除糞用コンベアベルト4の緊張度が高くなると、上昇し(矢印7b方向)、緊張度が緩むと下降する(矢印7c方向)。そして、テンションローラ7の上昇と下降によって、ケージ列の下側を走行する除糞用コンベアベルト4の張りは常に一定に維持される。このように除糞用コンベアベルト4の張りを適切に保ち、垂れないように維持することにより、その除糞用コンベアベルト4は、その階下に位置するケージ列の天井部分から予定の間隔離れて走行することになり、その結果下階のケージ列内で飼養されている鶏が除糞用コンベアベルト4を啄むことができない。このことは、コンベアベルト4の損傷を防止できるだけでなく、コンベアベルト4上に付着した糞を飼養鶏が啄むことにより伝染する病気の広がりを極力抑えることができることを意味している。
【0026】
上述のテンションローラ7は、気温の変化、鶏糞の載積量の変化およびコンベアベルト4の経時変化に対して上昇下降の動作が連続的に繰り返される。その激しい動きに対して、長時間安定した動作を保証するために、上昇下降の動作を案内し、且つ不要な水平方向の動きや共鳴振動などが生じないようにする案内構造が必要となる。
【0027】
そこで同実施例においては上記案内構造中の一つの構造である回動アーム7aを利用した構造を採用した。この回動アーム7aは駆動ローラ5を支える支柱3からテンションローラ7の軸に達する長さを有する棒状の部材から成り、該支柱3の中間位置を中心として回動するよう回動アーム7aが支柱3に軸支される。該回動アーム7aの他端にはテンションローラ7が回転自在に取り付けられる。こうすることにより、該テンションローラ7が上記支柱3の中間位置を中心とした回転軌道上で左右方向が規制され、しかも該テンションローラ7の動きに従って、上昇下降の運動は自由に行われる。また、この回動アーム7aのテンションローラ7側端部には、そのテンションローラ7の回転軸を通過する位置で上下方向に長い反射板9cが回動アーム7aに対して直行するように固着される。該反射板9cは全体として予め調節した長さを備えた四角柱から成る反射性の部材であり、表面全体が光の反射に富む材料で形成されている。
【0028】
図2はケージ列の終端部から駆動ローラ側を描いた側面図と、該側面図中において点線で囲って示した部分を拡大した斜視図とを組み合わせた図面である。同図を参照しつつ反射板9cと光学的なセンサー9aとの関係について説明する。該センサー9aは、ケージ列1の支柱からテンションローラ7側に向かって伸びる支持体8にセンサー支持体9bを介して取り付けられる。該センサー9aは、発光装置9dと受光装置9eとを備えた装置で、該発光装置9dの発する光は該反射板9cの反射面9fに到達すると反射して受光装置9eに向かって戻り、即ち受光装置9eがその光を感知する。受光装置9eが発光装置9dからの光を感知している間はテンションローラ7の高さが正常の範囲であると判断させ、その結果として警告動作は行わない。
【0029】
ところで、同図ではテンションローラ7がやや上昇した状態を示している。その後、鶏舎内の気温が著しく低下したと想定した場合、コンベアベルト4自体の温度も著しく冷えるとともに著しく収縮する。その収縮した長さに対応してテンションローラ7が上昇し、テンションローラ7と同期して上下する該反射板9cの反射面9fも著しく上昇する。そのことから発光装置9dの光は該反射板9cの下を通過して自由空間に放出され、該受光装置9eに光は到達しなくなる。ところで、該受光装置9eは制御装置(図示せず)に接続され、発光装置9dからの光を受光するか否かを監視する。そして、発光装置9dからの光を受光しなくなると、その結果に対応して制御装置が、警告ランプを点灯させて管理者に警告を促す。
【0030】
次に、気温が著しく上昇した場合を想定すると、
コンベアベルト4自体の温度も著しく上昇すると共に著しく伸びる。その伸びた長さに対応してテンションローラ7が下降し、テンションローラ7と同期して上下する該反射板9cの反射面9fも著しく下降する。そのことから発光装置9dの光は該反射板9cの上を通過して自由空間に放出され、該受光装置9eに光は到達しなくなる。その結果に対応して制御装置が警告ランプを点灯させ、管理者はその点灯を知見することにより警告状態にあることが判る。
【0031】
なお、所望に応じて制御装置が、警告ランプを点灯させると同時に、該駆動ローラ5に回転力を与えるための駆動源5aへの電源供給を遮断するように制御がなされ得る。例えば、受光装置9eが発光装置9dからの光を受光すると受光装置9eは微弱な電圧を発生する。この電圧の有無に応じて前記駆動源5aへの電源供給を同期させる。このようにすると、受光装置9eが発光装置9dからの光を受光しつづけている間は、自動的に前記駆動源5aへの電源供給がなされて駆動ローラ5が回転駆動し、除糞用コンベアベルト4が稼働状態となる。
【0032】
図3を参照して、具体的な検出例を説明する。同図は光学センサー9a(固定側)と、反射板9c(可動側)との相対的な関係を3種描いた説明図である。また、実施例1で説明したように、テンションローラ7と反射板9cとは同期して上昇下降を行う。
図中において、<A>は固定している光学センサー9aに対して、反射板9cが上側にずれることにより光学センサー9aの反応が、正常から異常に変化する。
同様に、<C>は固定している光学センサー9aに対して、反射板9cが下側にずれることにより光学センサー9aの反応が、正常から異常へと変化する。
一方、<B>は反射板9cが多少上下に揺動するものの反射板が光学センサー9a前に常に位置している状態を示し、その結果として光学センサー9aの反応は正常のまま変化しない。
以上説明してきたように、光学センサー9aと変動する反射板9cとの位置関係により、光学センサー9aで得られる検出結果は正常か否かの2通りの結果が得られる。
【0033】
次に、以上のように構成された光学センサー9aで検出される具体的な故障例を以下に説明する。
図4は、除糞用コンベアベルトの正常な状態の一例と、異常な状態の4種類の例を1つの図面上に列記した説明図である。図中において、
(3−1)は除糞用コンベアベルトが正常な状態である様子を示し、光学センサー9aと反射板9cとの相対的な関係は前述の<B>に対応する。
(3−2)は除糞用コンベアベルトが伸びた場合の例を示し、光学センサー9aと反射板9cとの相対的な関係は前述の<C>に対応する。
(3−3)は除糞用コンベアベルトが切れた場合の例を示し、光学センサー9aと反射板9cとの相対的な関係は前述の<C>に対応する。
(3−4)は除糞用コンベアベルトが縮んだ場合の例を示し、光学センサー9aと反射板9cとの相対的な関係は前述の<A>に対応する。
(3−5)は除糞用コンベアベルトが駆動ローラに巻き込まれた場合を示し、光学センサー9aと反射板9cとの相対的な関係は前述の<A>に対応する。
以上のように除糞用コンベアベルトにおける異常な状態(3−2)乃至(3−5)に対して、光学センサー9aと反射板9cとの相対的な関係は前述の<A>もしくは<C>の何れかに対応する。
従って、光学センサー9aと反射板9cとの相対的な関係が<A>もしくは<C>になるか否かを監視すること、言い換えると<B>の正常な状態から外れるか否かを監視することで、除糞用コンベアベルトにおける4種類の異常な状態に至っているか否かを監視することができる。
この監視結果に基づいて、前記駆動源5aを停止させることで、除糞用コンベアベルトの走行を停止させ、好ましくは走行停止と同時に警告ブザー、あるいは警告ランプを作動させることで、管理者が除糞用コンベアベルトの走行停止をいち早く認知することが可能となる。
【0034】
[実施例2]
図5は本発明の実施例2を示す部分拡大斜視図であり、図6はテンションローラ7が下がった状態における部分拡大側面図である。これら図面を参照して、実施例2の詳細を説明する。なお、実施例2は、実施例1に部分変更した実施例であり、同一部分は同一符号を付し、また実施例1と同一箇所の説明は省略した。
図中において、7dは上側の片持梁、7eは下側の片持梁、sw1は上側のスイッチ、sw2は下側のスイッチである。これら構成部品が実施例2で新たに追加されたものである。一方、実施例1から削除された主部品は、光学センサー9aとセンサー支持体9bである。
【0035】
片持梁7d、7eは、支柱3に対して回動アーム7aを挟むように固定され、上側の片持梁7dには上側のスイッチsw1が、下側の片持梁7eには下側のスイッチsw2が各々取り付けられる。また、片持梁7d、7eの中間位置にはスイッチの動きに合わせて先細りに成形され、その先端部分7gは、テンションローラ7を支える回動アーム7aと当たり、上下動するテンションローラ7の下方の限界を形成している。また、回動アーム7aが上記先端部分7gに当たった状態で、スイッチsw2の先端側が回動アーム7aと当たり、その結果から、スイッチsw2は閉状態から開状態へと変化する。
【0036】
回動アーム7aより上側に片持梁7dが4本のボルトによって支柱3に固着され、該片持梁7dの中間位置にはスイッチsw1が設けられ、該片持梁7dの先端側は先細りに成形されている。また、該片持梁7dの先端部分7hは、テンションローラ7を支える回動アーム7aと当たり、上下動するテンションローラ7の上方の限界を形成している。また、回動アーム7aが上記先端部分7hに当たった状態において、スイッチsw1の動作を見ると、スイッチsw1の延長部が回動アーム7aの中間部分7fに押されて弓なりに反る。その形状の変形によって、スイッチsw1は閉状態から開状態へと変化する。一方、片持梁7eが支柱3に4本のボルトによって取り付けられる。この取り付け位置は、図6でわかるように、回動アーム7aの回動中心位置と片持梁7dの取り付け位置との同距離分だけ、回動アーム7aの回動中心位置から下側に離れた位置に取り付けられている。また、片持梁7dと片持梁7eとは平行に設置される。以上の位置関係で支柱3に設置された片持梁7eは、中間位置にsw2が上側に沿って取り付けられ、さらに片持梁7eの先端は細く成形されている。さて、図6は回動アーム7aが時計回りに回転した様子を示し、回転したアーム7aは片持梁7eの先端部分7gに当たって止まる。また、この状態において、回動アーム7aの中間部分7fがスイッチsw2の延長部と当たって弓なりに変形させる。この変形によってsw2は閉状態から開状態へと変わる。また、回動アーム7aが片持梁7eと当たると、時計回りへの回動の限界になる。即ち、除糞用コンベアベルト4はこれ以上伸びた場合でも、回動アーム7aは上記限界で留まる。
【0037】
次に、駆動源の動作に関連した回路構成を説明する。次の順に直列回路が構成される。即ち、駆動源5aのプラス側のターミナル5b、上側のスイッチsw1、下側スイッチsw2、電源5d、および駆動源5aのマイナス側のターミナル5cが直列に結線される。一方、駆動源5aには回転再開を可能とするリセットボタン5gを装備している。なお、上記結線に用いた導線5fは外周が絶縁体で被覆されている。
【0038】
このように構成された実施例2の動作について説明する。図6は除糞用コンベアベルト4が正常な範囲を超えて伸びた状態を示し、テンションローラ7は除糞用コンベアベルト4の緊張が少なくなったために、下方の限界まで下がっている。即ち、テンションローラ7を支える回動アーム7aと片持梁7eの先端部分7gとが当たる状態となる。また、ほぼ同時に片持梁7eの中間位置に設置したスイッチsw2の延長部が回動アーム7aの中間部分7fに押されて弓なりに変形し、その結果、スイッチsw2が閉状態から開状態へと変わる。スイッチsw2が開状態となると、直列接続された電源5dからの電気は途絶え、駆動源5aは停止する。
【0039】
なお、除糞用コンベアベルト4が正常の範囲を超えて縮んだ場合(あるいは駆動ロータが除糞用コンベアベルト4を巻き込んだ場合)では、テンションローラ7は上昇し、テンションローラ7と連動する回動アーム7aが片持梁7dの先端部7hに当たって停止すると同時にスイッチsw1の延長部が回動アーム7aの中間部分7fに当たり、スイッチsw1が閉状態から開状態へと変わる。その結果としてスイッチsw1が直列接続された電源5dからの通電を停止させるために、駆動源5aは停止する。
【0040】
このように、除糞用コンベアベルト4の緊張状態が大きく変化すると、除糞用コンベアベルト4を走行させるための駆動源が自動停止することで、そのまま運転を続けた場合に生じるベルトの切断やベルトとロータとの摩擦から生じる異臭の発生などを未然に防ぐことができる。
【0041】
なお、止まった原因は管理者によって是正され、その後再開する場合は、駆動装置5aに設けられたリセットボタン5gを押すことによって、駆動装置5aを再び作動開始させることができる。
【0042】
以上実施例1ならびに実施例2は、何れも2階のケージ列内に飼養される鶏の糞を処理するための、除糞用コンベアベルト4に対して本発明の構成を適用したものであるが、同一の構成を1階のケージ列1における除糞用コンベアベルトに対して利用した場合について説明する。テンションローラが上記実施例と同様に設けられると1階の除糞用コンベアベルトの張りを適切に保ち、垂れないように維持することにより、その1階の除糞用コンベアベルトは、そのケージ列の設置している床面から予定の間隔離れて走行することになり、その結果、1階の除糞用コンベアベルトが許容できる範囲で緩んだとしても、テンションローラによって、垂れさがらずにすみ、床面との接触も回避できる。即ち、床面と除糞用コンベアベルトとの距離が確保される。もし、このテンションローラを含めて本発明の監視装置を用いない場合、除糞用コンベアベルトが伸びるとともに、徐々に床に近づき最終的に床を擦って除糞用コンベアベルトが走行するようになる。その結果として、除糞用コンベアベルトの外表面に傷が付きその利用期間が短くなる。また、床の汚れが除糞用コンベアベルトに付着する。さらに、床と除糞用コンベアベルトとの接触面積が大きくなると、負荷が大きくなりすぎて、除糞用コンベアベルトの走行が困難になり、除糞を行う能力を失う。または駆動ローラとコンベアベルトとの接触面が摩擦熱で過熱して異臭を放つなどの問題が生じる。
【0043】
一方、上記実施例において、テンションローラ7は、下側を走行する除糞用コンベアベルトを下方に付勢するように構成しているが、必要に応じて、上側を走行する除糞用コンベアベルトをバネ等の力によって、上方に付勢するように構成することも可能である。
【0044】
以上のように構成した本発明は、例えば、冬期において、気温低下が著しい環境下においは、除糞用コンベアベルトが縮み、除糞用コンベアベルトの張りが強くなる。そして、緊張度が許容値を越えると、監視装置が作動して、例えば警報を鳴らすことができる。そして、管理者は除糞用コンベアベルトの緊張度を是正すべく、各部の調整をするか、除糞用コンベアベルトを新しい柔軟なものに取り替える処置を行うことができる。
【0045】
このように監視装置によって早期に処置を行うことによって、除糞用コンベアベルトが切断に至ることを未然に防ぐことができる。
【0046】
一方、不慮の事故により、この除糞用コンベアベルトが切断した場合、一気に除糞用コンベアベルトの緊張度は無くなり、支えの無い場所では下方に垂れ下がる。また、除糞用コンベアベルトに走行駆動力を与えている駆動ローラが停止せずに回転し続けると、駆動ローラが停止している除糞用コンベアベルトの一カ所に当たり続けるため、摩擦熱が発生して異臭を発生させる可能性がある。本発明では、除糞用コンベアベルトの伸びや縮みを検出しつつ、このような切断に至る前に除糞用コンベアベルトを取り替えることを一つの目的としているが、取り換え時期に至らないと判断している状態であっても、不慮の事故で突然切断に至る場合は避けられない。また、突然の切断に至った場合であっても、本発明の除糞用コンベアベルトの監視装置は管理者等に警告すること、あるいは、除糞用コンベアベルトを停止させる等の制御が行われ、放置した場合における上述の問題を回避することが可能となる。
また、ケージ列が上下方向に連続する多段ゲージで利用した場合、多段ゲージ特有の問題を回避することが可能である。即ち、除糞用コンベアベルトが伸びて全体的に緊張度が足りなくなってきた場合、本発明を利用しない場合、階下に位置するケージ列の天井付近まで除糞用コンベアベルトは下がる。その結果、その階下に位置するケージ列内で飼養される鶏が天井の網越しに該除糞用コンベアベルトを啄み、コンベアベルトに傷を付けたり、あるいは、糞を媒介した伝染病が増加する危険が増加する。また、1階に設置されている除糞用コンベアベルトが伸びた場合、鶏舎の床と接触しつつ走行する場合があり、このような接触があると、除糞用コンベアベルトが傷つき、取り換え時期を早める必要があるが、本発明を利用することで、この接触を未然に回避することが可能となる。
【0047】
また、経年変化または温度上昇により、除糞用コンベアベルトが伸びて、下方に下がり、その結果として上記同様に階下に位置するケージ列内で飼養される鶏が下方に接近してきた除糞用コンベアベルトを天井の網越しについばみ、同理由で病気が増加する可能性がある。
本発明の、除糞用コンベアベルトの監視装置の作動により、警告を管理者が受けた場合、あるいは除糞用コンベアベルトが停止した場合、管理者は新しい除糞用コンベアベルトに取り替えることを検討する。あるいは、状況によっては、除糞用コンベアベルトの走行系の調節をし直すことによって、たるみや縮みを解消することが可能である。また、糞の影響を受けにくいように、緊張度を検出する装置をケージ列から離間させたことにより、上述の監視が適切に行われ得る構成を備えている。
【産業上の利用可能性】
【0048】
以上の実施例では、飼養鶏中心に説明してきたが、必ずしも飼養鶏に限定するものでは無く、格子状底部の上で飼養できる動物における畜舎に対して本発明は利用可能である。
【図面の簡単な説明】
【0049】
【図1】図1は除糞用コンベアベルトの監視装置を備えたケージ列を示した説明用斜視図である。
【図2】図2はケージ列の終端部から駆動ローラ側を描いた側面図と、該側面図中において点線で囲って示した部分を拡大した斜視図とを組み合わせた図面である。
【図3】図3は光学センサー(固定側)と、反射板(可動側)との相対的な関係を3種描いた説明図である。
【図4】図3は、除糞用コンベアベルトの正常な状態の一例と、異常な状態の4種類の例を1つの図面上に列記した説明図である。
【図5】図5は本発明の実施例2を示す部分拡大斜視図である。
【図6】図6は実施例2の部分拡大側面図である。
【符号の説明】
【0050】
1…1段目のケージ列
2…二段目のケージ列
3…支柱
4…除糞用コンベアベルト
5…駆動ローラ
5a…駆動源
5b…プラス側のターミナル
5c…マイナス側のターミナル
5d…電源
5m…モータ
6a、6b、6c…案内ローラ
7…テンションローラ
7a…回動アーム
8…支持体
9…緊張度を検出する装置
10…格子状底部
11…網の一部
7d…上側の片持梁
7e…下側の片持梁
sw1…上側のスイッチ
sw2…下側のスイッチ
【特許請求の範囲】
【請求項1】
各々飼養鶏の排出する糞が通過でき格子状底部を備えたケージ列と、
該ケージ列の長手方向の下方に沿って設けられ、該格子状底部を通過し落下する糞を受け、糞を移動するための除糞用コンベアベルトと、
該ケージ列の端部から該ケージ列の長手方向に離隔した位置に設けられた除糞用コンベアベルトの駆動ローラと、
該駆動ローラと該ケージ列との間に設けられ、上記除糞用コンベアベルトの緊張度を検出する装置とを有する、
ことを特徴とする、除糞用コンベアベルトの監視装置。
【請求項2】
上記緊張度を検出する装置が、上記除糞用コンベアベルトを下方に付勢するテンションローラと、該テンションローラの位置を検出する検出装置とを有する、ことを特徴とする、請求項1記載の除糞用コンベアベルトの監視装置。
【請求項3】
上記テンションローラの設置位置が、除糞用コンベアベルトの戻り側で、ケージ列と駆動ローラとの間とした、請求項2記載の除糞用コンベアベルトの監視装置。
【請求項4】
除糞用コンベアベルトの上記緊張度を検出する装置が、該テンションローラの上下動が予め決定した正常範囲内に入っているか、否かを検出するようにした、請求項2又は3の何れかに記載の除糞用コンベアベルトの監視装置。
【請求項1】
各々飼養鶏の排出する糞が通過でき格子状底部を備えたケージ列と、
該ケージ列の長手方向の下方に沿って設けられ、該格子状底部を通過し落下する糞を受け、糞を移動するための除糞用コンベアベルトと、
該ケージ列の端部から該ケージ列の長手方向に離隔した位置に設けられた除糞用コンベアベルトの駆動ローラと、
該駆動ローラと該ケージ列との間に設けられ、上記除糞用コンベアベルトの緊張度を検出する装置とを有する、
ことを特徴とする、除糞用コンベアベルトの監視装置。
【請求項2】
上記緊張度を検出する装置が、上記除糞用コンベアベルトを下方に付勢するテンションローラと、該テンションローラの位置を検出する検出装置とを有する、ことを特徴とする、請求項1記載の除糞用コンベアベルトの監視装置。
【請求項3】
上記テンションローラの設置位置が、除糞用コンベアベルトの戻り側で、ケージ列と駆動ローラとの間とした、請求項2記載の除糞用コンベアベルトの監視装置。
【請求項4】
除糞用コンベアベルトの上記緊張度を検出する装置が、該テンションローラの上下動が予め決定した正常範囲内に入っているか、否かを検出するようにした、請求項2又は3の何れかに記載の除糞用コンベアベルトの監視装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2009−55863(P2009−55863A)
【公開日】平成21年3月19日(2009.3.19)
【国際特許分類】
【出願番号】特願2007−226941(P2007−226941)
【出願日】平成19年8月31日(2007.8.31)
【出願人】(390030661)株式会社ハイテム (22)
【Fターム(参考)】
【公開日】平成21年3月19日(2009.3.19)
【国際特許分類】
【出願日】平成19年8月31日(2007.8.31)
【出願人】(390030661)株式会社ハイテム (22)
【Fターム(参考)】
[ Back to top ]