
除草用ブラシローラ及び水田除草方法
【課題】本発明は、フロートを必要とせず、稲株を傷めず、かつ稲列に沿って走行させる/走行する必要がない除草用ブラシローラ及び水田除草方法を提供する。
【解決手段】自律走行ロボットAの直進走行中は、走行方向の前後の除草用ブラシローラ1のローラ回転速度に差を設け、走行予定速度に対して一方(前部又は後部)の除草用ブラシローラ1を早く、かつ他方(後部又は前部)の除草用ブラシローラ1を遅く回転させることによって、柔軟構造の支持棒4の先端と田圃面にスリップを生じさせ、田圃面の撹拌をより強力に行うことができる。前記除草用ブラシローラ1は、駆動軸2に軸支された回転ドラム3を設け、該回転ドラム3の円周外面に放射状に多数の柔軟構造の支持棒4を突設させることによって形成される。
【解決手段】自律走行ロボットAの直進走行中は、走行方向の前後の除草用ブラシローラ1のローラ回転速度に差を設け、走行予定速度に対して一方(前部又は後部)の除草用ブラシローラ1を早く、かつ他方(後部又は前部)の除草用ブラシローラ1を遅く回転させることによって、柔軟構造の支持棒4の先端と田圃面にスリップを生じさせ、田圃面の撹拌をより強力に行うことができる。前記除草用ブラシローラ1は、駆動軸2に軸支された回転ドラム3を設け、該回転ドラム3の円周外面に放射状に多数の柔軟構造の支持棒4を突設させることによって形成される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、稲株を傷めず、かつ稲列に沿って走行させる/走行する必要がない除草用ブラシローラ及び水田除草方法に関する。
【背景技術】
【0002】
従来、より安全な食料供給、環境保全型農業の実現に向けて自然農法(有機農法)に取り組む農家にとって除草作業が大きな負担になっている。
除草作業には、歩行型、乗用型の除草機が使われているが、作業中は常に人が操縦する必要があり、除草剤を使う慣行農法に比べると労働コストが大きい。
【0003】
そのため、自走型水田除草ロボットも開発されている。除草機体にエンジンを搭載し、エンジン出力供給を受けて遊泳するフロートに、走行を兼ねた除草装置を装備する水田除草機が知られている(特許文献1を参照)。
この公知技術は、センターフロートと両サイドフロートの間に、撹拌プレートを備えた除草ロータからなる除草装置を合計2個配備したフロート除草機構を設け、該フロート除草機構を前後に間隔調整固定して複数個設けた機体連結フレームを構成し、該機体連結フレーム上部にエンジンを搭載して出力を前記除草装置に伝動させて走行条間除草を行う水田除草機である。
この水田除草機は、センターフロートと両サイドフロートの間に除草装置を配備したフロート除草機構を必要とし、前記フロートにより除草機体の沈降を防止することができるものであるが、稲株に前記フロートを接触させて傷めたり、場合によっては稲株を横倒す恐れがあるものである。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2002−84813号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は、フロートを必要とせず、稲株を傷めず、かつ稲列に沿って走行させる/走行する必要がない除草用ブラシローラ及び水田除草方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の除草用ブラシローラは、駆動軸に軸支された回転ドラムを設け、該回転ドラムの円周外面に放射状に多数の柔軟構造の支持棒を突設させることによって、稲列に沿わなくても除草を行うことを可能としたものである。
本発明の水田除草方法は、前記除草用ブラシローラを走行予定速度に対して早く又は遅く回転させることによって、柔軟構造の支持棒の先端と田圃面にスリップを生じさせ、田圃面の撹拌をより強力に行うことにより除草を行うものである。
【発明の効果】
【0007】
本発明の除草用ブラシローラは、駆動軸に軸支された回転ドラムを設け、該回転ドラムの円周外面に放射状に多数の柔軟構造の支持棒を突設させることによって、前記支持棒が稲株に触れても柔軟性により稲を避けるので、稲列に沿わなくても除草を行うことができる。
本発明の水田除草方法は、除草用ブラシローラを走行予定速度に対して早く又は遅く回転させることによって、柔軟構造の支持棒の先端と田圃面にスリップを生じさせ、田圃面の撹拌をより強力に行うため、除草効果を向上させることができる。
【図面の簡単な説明】
【0008】
【図4】本発明の除草用ブラシローラを示す側面図である。
【図5】本発明の除草用ブラシローラを示す正面図である。
【図6】除草用ブラシローラの支持棒の柔軟性を示す斜視図である。
【図1】本発明の自律走行ロボットの側面図である。
【図2】本発明の自律走行ロボットの正面図である。
【図3】本発明の自律走行ロボットの平面図である。
【図7】本発明の自律走行ロボットのスイッチバックの説明図である。
【図8】本発明の除草用ブラシローラを使用した他の実施例の側面図である。
【発明を実施するための形態】
【0009】
本発明の除草用ブラシローラの一実施例を添付図面に基づいて、以下に説明する。
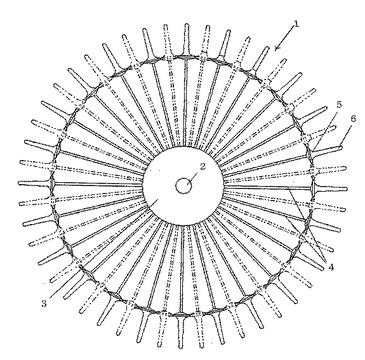
図1の側面図に示すように、除草用ブラシローラ1は、駆動軸2に軸支された回転ドラム3を設け、該回転ドラム3の円周外面に放射状に多数の柔軟構造の支持棒4を突設させて形成される。
したがって、前記除草用ブラシローラ1は、前記支持棒4の先端を外周円とする走行ローラとなると共に、田圃を撹拌するブラシにもなる。
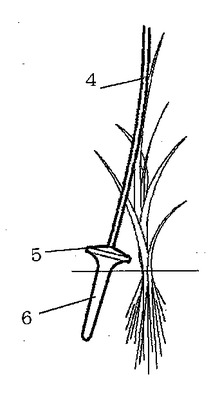
前記支持棒4の先端には、深さコントロールのために鍔(つば)5及び円錐丸棒6を備えているが、これに限らず、先端深さバラツキに対する地耐力バラツキの影響を軽減するものであれば円錐状、鍔状、中空状等の手段で実現することができるし、又適宜深さで自重を支えることができるならば、これらを設けなくてもよい。
図3の斜視図に示すように、前記支持棒4は、除草用ブラシローラ1の回転時に稲株に触れても柔軟性により湾曲して稲を避けることができる所定長さを有する。
【0010】
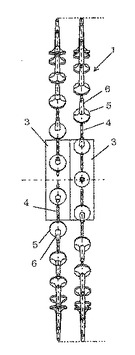
また、図2の正面図に示すように、駆動軸2に隣接して軸支された多数個の円筒体の回転ドラム3を設け、隣接する回転ドラム3同士は、前記支持棒4が互い違いになるように千鳥状に配置してもよい。
前記支持棒4は、柔軟性を有する合成樹脂や竹などで製作して適宜深さで自重を支えると共に、図3に示すように稲株にダメージを与えず、またスイッチバック時の内輪差を吸収するための柔軟性を持っている。
【0011】
次に、本発明のブラシローラを使用した自律走行ロボットAを添付図面に基づいて、以下に説明する。
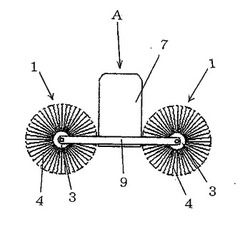
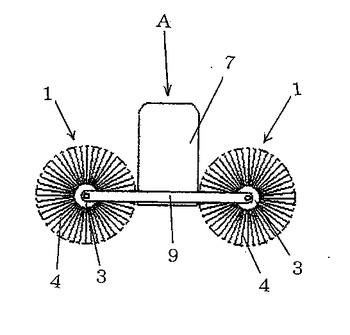
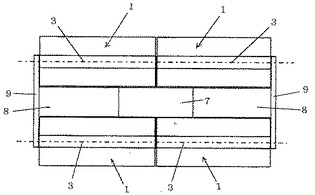
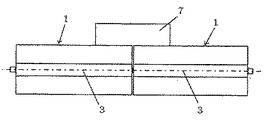
図4の側面図、図5の正面図、図6の側面図に示すように、自律走行ロボットAは、前記除草用ブラシローラ1を左右に2基ずつ前部及び後部に2基ずつ合計4基備え、前記除草用ブラシローラ1の4基の中央位置に前記除草用ブラシローラ1を回転させるエンジン発電機及び制御ユニット7を設けた本体部8から構成される。
前記本体部8は、前記エンジン発電機及び制御ユニット7からの4系統独立制御指令により前記除草用ブラシローラ1を独立して回転駆動させる駆動機構(図示せず)を備えている。
自律走行型ロボットAは、前記エンジン発電機及び制御ユニット7の下部又は適切な場所に稲列及び田圃の端を検出するための検知センサ(図示せず)を備える。
なお、9は前記除草用ブラシローラ1の駆動軸2を支持連結する連結杆である。
【0012】
次に、自律走行ロボットAの操作動作を添付図面に基づいて、以下に説明する。
図4に示す自律走行ロボットAは、エンジン発電機及び制御ユニット7からの4系統独立制御指令により除草用ブラシローラ1を独立して駆動機構(図示せず)により回転駆動させる。
自律走行ロボットAの直進走行中は、全部の除草用ブラシローラ1を等速回転させても田圃面の撹拌を行うことが可能であるが、走行方向の前後の除草用ブラシローラ1のローラ回転速度に差を設け、走行予定速度に対して一方(前部又は後部)の除草用ブラシローラ1を早く、かつ他方(後部又は前部)の除草用ブラシローラ1を遅く回転させることによって、柔軟構造の支持棒4の先端と田圃面にスリップを生じさせ、田圃面の撹拌をより強力に行うことができる。
さらに、4基の除草用ブラシローラ1の内1基だけを速く(又は遅く)制御することで当該除草用ブラシローラ1をスリップさせることができ、これを短時間で4基各々交代で行うことでスリップさせ、田圃面の撹拌をより強力に行うことができる。
【0013】
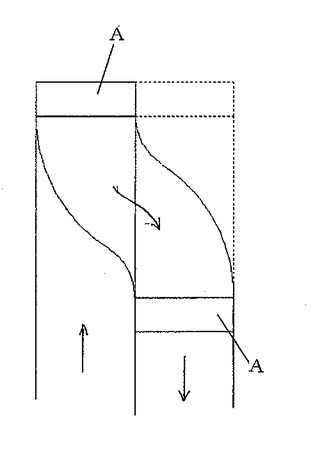
また、図7の説明図に示すように、直進走行中の自律走行ロボットAは、田圃の端ではストップし、エンジン発電機及び制御ユニット7からの4系統独立制御指令により除草用ブラシローラ1を独立して駆動機構(図示せず)により逆回転駆動させる。
この時、前記除草用ブラシローラ1のローラ幅の内輪差によるスリップを考慮し、除草欠株を生じない範囲で大きな回転半径をとる。
このスイッチバック時には、前記除草用ブラシローラ1の各ローラを複雑に速度制御する必要があり、このため4つの前記除草用ブラシローラ1を時々刻々と回転速度を変化させてスイッチバックを実現する。
【0014】
なお、上記実施例では、自律走行ロボットAの場合を説明したが、これに限らず、トラクター等の後部に自律走行ロボットAを装備して、前記自律走行ロボットAの駆動機構(図示せず)をニュートラル(回転自由)にして、前記自律走行ロボットAを牽引し除草を行うことも可能である。
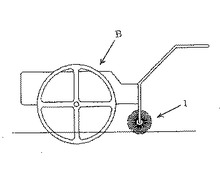
また、図8の側面図に示すように、既存の田植え機Bや管理機の下部に除草幅いっぱいに1つの除草用ブラシローラ1を備え、既存の田植え機や管理機に取り付けて利用することも可能である。
この場合、前記除草用ブラシローラ1を田植え機B又は管理機の走行速度に対して遅く又は早く回転駆動すれば、より良く田圃面を撹拌して除草効果を高められる。
【符号の説明】
【0015】
1 除草用ブラシローラ
2 駆動軸
3 回転ドラム
4 支持棒
5 鍔
6 円錐丸棒
7 エンジン発電機及び制御ユニット
8 本体部
9 連結杆
A 自律走行ロボット
B 田植え機
【技術分野】
【0001】
本発明は、稲株を傷めず、かつ稲列に沿って走行させる/走行する必要がない除草用ブラシローラ及び水田除草方法に関する。
【背景技術】
【0002】
従来、より安全な食料供給、環境保全型農業の実現に向けて自然農法(有機農法)に取り組む農家にとって除草作業が大きな負担になっている。
除草作業には、歩行型、乗用型の除草機が使われているが、作業中は常に人が操縦する必要があり、除草剤を使う慣行農法に比べると労働コストが大きい。
【0003】
そのため、自走型水田除草ロボットも開発されている。除草機体にエンジンを搭載し、エンジン出力供給を受けて遊泳するフロートに、走行を兼ねた除草装置を装備する水田除草機が知られている(特許文献1を参照)。
この公知技術は、センターフロートと両サイドフロートの間に、撹拌プレートを備えた除草ロータからなる除草装置を合計2個配備したフロート除草機構を設け、該フロート除草機構を前後に間隔調整固定して複数個設けた機体連結フレームを構成し、該機体連結フレーム上部にエンジンを搭載して出力を前記除草装置に伝動させて走行条間除草を行う水田除草機である。
この水田除草機は、センターフロートと両サイドフロートの間に除草装置を配備したフロート除草機構を必要とし、前記フロートにより除草機体の沈降を防止することができるものであるが、稲株に前記フロートを接触させて傷めたり、場合によっては稲株を横倒す恐れがあるものである。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2002−84813号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は、フロートを必要とせず、稲株を傷めず、かつ稲列に沿って走行させる/走行する必要がない除草用ブラシローラ及び水田除草方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の除草用ブラシローラは、駆動軸に軸支された回転ドラムを設け、該回転ドラムの円周外面に放射状に多数の柔軟構造の支持棒を突設させることによって、稲列に沿わなくても除草を行うことを可能としたものである。
本発明の水田除草方法は、前記除草用ブラシローラを走行予定速度に対して早く又は遅く回転させることによって、柔軟構造の支持棒の先端と田圃面にスリップを生じさせ、田圃面の撹拌をより強力に行うことにより除草を行うものである。
【発明の効果】
【0007】
本発明の除草用ブラシローラは、駆動軸に軸支された回転ドラムを設け、該回転ドラムの円周外面に放射状に多数の柔軟構造の支持棒を突設させることによって、前記支持棒が稲株に触れても柔軟性により稲を避けるので、稲列に沿わなくても除草を行うことができる。
本発明の水田除草方法は、除草用ブラシローラを走行予定速度に対して早く又は遅く回転させることによって、柔軟構造の支持棒の先端と田圃面にスリップを生じさせ、田圃面の撹拌をより強力に行うため、除草効果を向上させることができる。
【図面の簡単な説明】
【0008】
【図4】本発明の除草用ブラシローラを示す側面図である。
【図5】本発明の除草用ブラシローラを示す正面図である。
【図6】除草用ブラシローラの支持棒の柔軟性を示す斜視図である。
【図1】本発明の自律走行ロボットの側面図である。
【図2】本発明の自律走行ロボットの正面図である。
【図3】本発明の自律走行ロボットの平面図である。
【図7】本発明の自律走行ロボットのスイッチバックの説明図である。
【図8】本発明の除草用ブラシローラを使用した他の実施例の側面図である。
【発明を実施するための形態】
【0009】
本発明の除草用ブラシローラの一実施例を添付図面に基づいて、以下に説明する。
図1の側面図に示すように、除草用ブラシローラ1は、駆動軸2に軸支された回転ドラム3を設け、該回転ドラム3の円周外面に放射状に多数の柔軟構造の支持棒4を突設させて形成される。
したがって、前記除草用ブラシローラ1は、前記支持棒4の先端を外周円とする走行ローラとなると共に、田圃を撹拌するブラシにもなる。
前記支持棒4の先端には、深さコントロールのために鍔(つば)5及び円錐丸棒6を備えているが、これに限らず、先端深さバラツキに対する地耐力バラツキの影響を軽減するものであれば円錐状、鍔状、中空状等の手段で実現することができるし、又適宜深さで自重を支えることができるならば、これらを設けなくてもよい。
図3の斜視図に示すように、前記支持棒4は、除草用ブラシローラ1の回転時に稲株に触れても柔軟性により湾曲して稲を避けることができる所定長さを有する。
【0010】
また、図2の正面図に示すように、駆動軸2に隣接して軸支された多数個の円筒体の回転ドラム3を設け、隣接する回転ドラム3同士は、前記支持棒4が互い違いになるように千鳥状に配置してもよい。
前記支持棒4は、柔軟性を有する合成樹脂や竹などで製作して適宜深さで自重を支えると共に、図3に示すように稲株にダメージを与えず、またスイッチバック時の内輪差を吸収するための柔軟性を持っている。
【0011】
次に、本発明のブラシローラを使用した自律走行ロボットAを添付図面に基づいて、以下に説明する。
図4の側面図、図5の正面図、図6の側面図に示すように、自律走行ロボットAは、前記除草用ブラシローラ1を左右に2基ずつ前部及び後部に2基ずつ合計4基備え、前記除草用ブラシローラ1の4基の中央位置に前記除草用ブラシローラ1を回転させるエンジン発電機及び制御ユニット7を設けた本体部8から構成される。
前記本体部8は、前記エンジン発電機及び制御ユニット7からの4系統独立制御指令により前記除草用ブラシローラ1を独立して回転駆動させる駆動機構(図示せず)を備えている。
自律走行型ロボットAは、前記エンジン発電機及び制御ユニット7の下部又は適切な場所に稲列及び田圃の端を検出するための検知センサ(図示せず)を備える。
なお、9は前記除草用ブラシローラ1の駆動軸2を支持連結する連結杆である。
【0012】
次に、自律走行ロボットAの操作動作を添付図面に基づいて、以下に説明する。
図4に示す自律走行ロボットAは、エンジン発電機及び制御ユニット7からの4系統独立制御指令により除草用ブラシローラ1を独立して駆動機構(図示せず)により回転駆動させる。
自律走行ロボットAの直進走行中は、全部の除草用ブラシローラ1を等速回転させても田圃面の撹拌を行うことが可能であるが、走行方向の前後の除草用ブラシローラ1のローラ回転速度に差を設け、走行予定速度に対して一方(前部又は後部)の除草用ブラシローラ1を早く、かつ他方(後部又は前部)の除草用ブラシローラ1を遅く回転させることによって、柔軟構造の支持棒4の先端と田圃面にスリップを生じさせ、田圃面の撹拌をより強力に行うことができる。
さらに、4基の除草用ブラシローラ1の内1基だけを速く(又は遅く)制御することで当該除草用ブラシローラ1をスリップさせることができ、これを短時間で4基各々交代で行うことでスリップさせ、田圃面の撹拌をより強力に行うことができる。
【0013】
また、図7の説明図に示すように、直進走行中の自律走行ロボットAは、田圃の端ではストップし、エンジン発電機及び制御ユニット7からの4系統独立制御指令により除草用ブラシローラ1を独立して駆動機構(図示せず)により逆回転駆動させる。
この時、前記除草用ブラシローラ1のローラ幅の内輪差によるスリップを考慮し、除草欠株を生じない範囲で大きな回転半径をとる。
このスイッチバック時には、前記除草用ブラシローラ1の各ローラを複雑に速度制御する必要があり、このため4つの前記除草用ブラシローラ1を時々刻々と回転速度を変化させてスイッチバックを実現する。
【0014】
なお、上記実施例では、自律走行ロボットAの場合を説明したが、これに限らず、トラクター等の後部に自律走行ロボットAを装備して、前記自律走行ロボットAの駆動機構(図示せず)をニュートラル(回転自由)にして、前記自律走行ロボットAを牽引し除草を行うことも可能である。
また、図8の側面図に示すように、既存の田植え機Bや管理機の下部に除草幅いっぱいに1つの除草用ブラシローラ1を備え、既存の田植え機や管理機に取り付けて利用することも可能である。
この場合、前記除草用ブラシローラ1を田植え機B又は管理機の走行速度に対して遅く又は早く回転駆動すれば、より良く田圃面を撹拌して除草効果を高められる。
【符号の説明】
【0015】
1 除草用ブラシローラ
2 駆動軸
3 回転ドラム
4 支持棒
5 鍔
6 円錐丸棒
7 エンジン発電機及び制御ユニット
8 本体部
9 連結杆
A 自律走行ロボット
B 田植え機
【特許請求の範囲】
【請求項1】
駆動軸に軸支された回転ドラムを設け、該回転ドラムの円周外面に放射状に多数の柔軟構造の支持棒を突設させることによって、稲列に沿わなくても除草を行うことを可能としたことを特徴とする除草用ブラシローラ。
【請求項2】
前記請求項1記載の除草用ブラシローラを走行予定速度に対して早く又は遅く回転させることによって、柔軟構造の支持棒の先端と田圃面にスリップを生じさせ、田圃面の撹拌をより強力に行うことにより除草を行うことを特徴とする水田除草方法。
【請求項1】
駆動軸に軸支された回転ドラムを設け、該回転ドラムの円周外面に放射状に多数の柔軟構造の支持棒を突設させることによって、稲列に沿わなくても除草を行うことを可能としたことを特徴とする除草用ブラシローラ。
【請求項2】
前記請求項1記載の除草用ブラシローラを走行予定速度に対して早く又は遅く回転させることによって、柔軟構造の支持棒の先端と田圃面にスリップを生じさせ、田圃面の撹拌をより強力に行うことにより除草を行うことを特徴とする水田除草方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2012−10629(P2012−10629A)
【公開日】平成24年1月19日(2012.1.19)
【国際特許分類】
【出願番号】特願2010−148684(P2010−148684)
【出願日】平成22年6月30日(2010.6.30)
【出願人】(510119614)
【Fターム(参考)】
【公開日】平成24年1月19日(2012.1.19)
【国際特許分類】
【出願日】平成22年6月30日(2010.6.30)
【出願人】(510119614)
【Fターム(参考)】
[ Back to top ]