
陽子コンピュータ断層撮影のためのシステム及び方法
陽子コンピュータ断層撮影に関連するシステムと、デバイスと、方法とが開示される。幾つかの実施態様では、陽子の検出は、各陽子についてオブジェクトの前及び後のトラック情報をもたらすことができ、それによってオブジェクト内での各陽子の、可能性が高い経路を求めることが可能になる。さらに、各陽子が受けるエネルギー損失の測定によって、所与の可能性の高い経路が所与のエネルギー損失をもたらすという判定が可能になる。こうしたデータの集合によって、オブジェクトの特徴付けが可能になる。エネルギー損失に関して、こうした特徴付けは、オブジェクトの相対阻止能の画像マップを含むことができる。限定はしないが、総変動等のメリット関数の優秀化を含むこうした画像を取得するための種々の再構成方法が開示される。幾つかの実施態様では、種々の形態の総変動優秀化方法は、計算的に効率的であり、かつ、計算時間を低減しながら、優れた結果をもたらすことができる。幾つかの実施態様では、こうした方法は、比較的低い陽子線量を使用して、高品質陽子CT画像をもたらすことができる。
【発明の詳細な説明】
【技術分野】
【0001】
本開示は、包括的には、医療撮像の分野に関し、より詳細には、陽子コンピュータ断層撮影のためのシステム及び方法に関する。
【0002】
[優先権の主張]
本出願は、2010年2月12日に出願された「PROTON COMPUTED TOMOGRAPHY」という名称の米国仮特許出願第61/303,783号の米国特許法第119条(e)による優先権の利益を主張し、この出願は、参照によりその全体が本明細書に援用され、本明細書の一部とみなされる。
【0003】
[連邦政府による資金提供を受けた研究開発の記載]
本発明は、国立心肺血液研究所によって与えられたNIH認可番号第R01HL070472号による政府の支援によって、一部資金提供を受けたものである。政府は、本発明において一定の権利を有する。
【背景技術】
【0004】
コンピュータ断層撮影(CT)は、3次元オブジェクトの特定の物理的特性の再構成を可能にし、この再構成を、オブジェクトの2次元断面、すなわち「断層」画像のアレイとして配列し表示する。こうした再構成は、オブジェクトに貫入する、適切に構成されたX線又は粒子放射線によって容易にすることができる。こうした放射線の検出及びこうしたデータの処理は、こうした2次元画像の再構成を容易にすることができる。
【0005】
陽子ビームは、オブジェクトを貫通するように構成することができる。こうしたオブジェクトを通過する陽子からの2次元画像の再構成は、関わる陽子の数が比較的多く、オブジェクト内で陽子が受ける相互作用のタイプが様々であるため困難である場合がある。
【発明の概要】
【0006】
幾つかの実施態様において、本開示は、コンピュータ断層撮影を実施するための方法に関する。本方法は、オブジェクトを通過する複数の陽子について測定データを取得することを含む。測定データは、陽子のそれぞれについて第1のトラック及び第2のトラックに関する情報を含む。第1のトラック及び第2のトラックは、それぞれ、陽子の、オブジェクトの通過の前及び後の陽子の軌跡に対応する。測定データは、陽子の、オブジェクトの通過によって生じる各陽子の相互作用量に関する情報を更に含む。本方法は、第1のトラック及び第2のトラックに少なくとも部分的に基づいてオブジェクト内で陽子がとる経路を推定することを更に含む。本方法は、陽子の、オブジェクトの通過が、連立方程式Ax=bとして表されるか又は表すことが可能であるように、陽子の相互作用量及び推定経路を配列すること更に含み、ここで、xは、オブジェクトに関連するパラメータの分布であり、bは、オブジェクト内の陽子のそれぞれの経路に沿う相互作用から生じる陽子の相互作用量を表し、Aは、bを得るためにxに作用する作用素である。作用素Aは、オブジェクト内の陽子の推定経路に関する情報を有する。連立方程式は、複数の解を有するように構成することができる。本方法は、連立方程式について初期解を推定することを更に含む。本方法は、複数の解の中で1つ又は複数の実行可能解を探すことであって、各実行可能解は、既存の解に摂動を与えることによって得られ、既存の解の摂動なしで得られる別の解よりも、オブジェクトパラメータ分布の再構成に関連する量について優れた特性を有する、探すことを更に含む。本方法は、1つ又は複数の実行可能解のうちの選択された1つの解に基づいてオブジェクトパラメータ分布を計算することを更に含む。
【0007】
幾つかの実施態様において、陽子の相互作用量は、陽子の、オブジェクトの通過によって生じる陽子のエネルギー損失を含むことができる。幾つかの実施態様において、bは、陽子の推定経路に沿う相互作用量の積分値を表すことができる。幾つかの実施態様において、連立方程式Ax=bは、連立一次方程式とすることができる。こうした連立方程式において、作用素Aは行列とすることができる。
【0008】
幾つかの実施態様において、選択された実行可能解は、複数の解の中で最適解でない実行可能解を含むことができる。幾つかの実施態様において、オブジェクトパラメータ分布を計算することは、3Dオブジェクトパラメータ分布を計算することを含むことができる。幾つかの実施態様において、本方法は、計算されたオブジェクトパラメータ分布に基づいてオブジェクトの断層画像のアレイを形成することを更に含むことができる。
【0009】
幾つかの実施態様において、オブジェクトパラメータ分布は、電子密度ベース量の分布を含むことができる。電子密度ベース量は、水等の実質的に一様な物質に対する相対的陽子阻止能を含むことができる。幾つかの実施態様において、再構成されるオブジェクトパラメータ分布は、電子密度ベース量の3次元分布を含むことができる。
【0010】
幾つかの実施態様において、経路を推定することは、陽子の最尤経路を推定することを含むことができる。幾つかの実施態様において、オブジェクトパラメータ分布の再構成に関連する量は、再構成されたオブジェクトパラメータ分布の総変動を含むことができる。総変動の優れた特性は、総変動の、より低い値を含むことができる。
【0011】
幾つかの実施態様において、初期解を推定することは、フィルタリングされた逆投影再構成解を計算することを含むことができる。
【0012】
幾つかの実施態様において、1つ又は複数の実行可能解を探すことは、オブジェクトパラメータ分布xのベクトル表現xkに摂動を与えることであって、摂動付与済みベクトルykを得る、摂動を与えることと、摂動付与済みベクトルykに関連する再構成されたオブジェクトパラメータ分布に関連する量を評価することと、摂動付与済みベクトルykに関連する量が、未摂動ベクトルxkに関連する量より優れている場合、ykを投影することであって、それによって次のベクトル表現xk+1を得る、ykを投影することと
の反復を実施することを含む。
【0013】
幾つかの実施態様において、ベクトルxkに摂動を与えることは、yk=xk+βkvkとなるようにykを計算することを含むことができ、ここで、βkは、摂動の大きさを表し、vkは、摂動ベクトルである。幾つかの実施態様において、ykについて評価された量が、xkについて評価された量以下である場合、摂動付与済みベクトルykに関連する量は、未摂動ベクトルxkに関連する量に対して優れている。幾つかの実施態様において、投影することは、或る関連する凸集合上へのxkの数学的に規定された投影としてxk+1を計算することを含むことができる。投影することは、測定データが複数のブロックに分割されるように、ブロック反復投影アルゴリズムを使用して、超平面、半空間、超スラブ、又は他の凸集合上に投影することを含むことができる。幾つかの実施態様において、投影することは、連立方程式の個々の超平面上への直交投影とともに、対角成分ごとの緩和を可能にするように構成された対角緩和した直交投影(DROP)ベースアルゴリズムを使用して投影することを含むことができる。幾つかの実施態様において、DROPベースアルゴリズムは、対角緩和した直交行列λkUt(k)を含むことができ、ここで、λkは、k番目の反復についての緩和パラメータであり、Ut(k)は、t番目のブロックについて対角要素min(1,1/htj)を有する対角行列であり、htjは、ベクトルxkのj番目のボクセルと交差するt番目のブロック内の陽子履歴の数である。
【0014】
幾つかの実施態様において、投影することは、次の反復に進む前に、ブロックが全て処理されるまで、ブロックを通して周期的に実施することができる。幾つかの実施態様において、反復は、処置される所与のブロックについて、投影することが該所与のブロックについてだけ実施されるように、各ブロックについて実施することができる。
【0015】
幾つかの実施態様において、本開示は、陽子コンピュータ断層撮影を実施する方法に関する。本方法は、オブジェクトを通過する複数の陽子について測定データを取得することを含む。本方法は、測定データに対する総変動優秀化に基づいて投影ベース再構成アルゴリズムを反復して適用することであって、オブジェクトの相対阻止能の分布を得る、適用することを更に含む。幾つかの実施態様において、本方法は、相対阻止能分布に基づいてオブジェクトの視覚画像を形成することを更に含むことができる。
【0016】
幾つかの実施態様において、本開示は、陽子コンピュータ断層撮影システムに関する。本システムは、オブジェクトを通過するのに十分な、選択された平均エネルギーを有する複数の陽子を送出するように構成された陽子送出システムを備える。本システムは、陽子のそれぞれについて、オブジェクトの前及び後の軌跡、並びに、オブジェクトを通過した後のエネルギーを測定するように構成された検出器システムを更に備える。本システムは、検出器システムから信号を読み出し、それによって陽子のそれぞれの軌跡及びエネルギーを表す測定データを得るように構成されたデータ収集システムを更に備える。本システムは、測定データを処理して画像再構成を実施し、それによってオブジェクトのコンピュータ断層画像を得るように構成されたプロセッサを更に備える。画像再構成は、総変動優秀化に基づく反復の投影ベース再構成アルゴリズムを含む。
【0017】
幾つかの実施態様において、本開示は、陽子治療システムに関する。本システムは、第1の平均エネルギー及び第2の平均エネルギーを有する陽子ビームを送出するように構成された陽子送出システムを備える。第1の平均エネルギーは、第1のブラッグピークが、身体の一部分の内部のターゲット領域内の場所で起こるように選択される。第2の平均エネルギーは、陽子ビームが、身体の一部分を通過するように選択される。本システムは、ターゲット領域に対する第1のエネルギーのビームの送出を容易にするように構成された第1の検出器システムを更に備える。本システムは、第2のエネルギーを有し、身体の一部分を通過する陽子のそれぞれについて、身体の一部分の前及び後の軌跡、並びに、身体の一部分を通過した後のエネルギーを測定するように構成された第2の検出器システムを更に備える。本システムは、少なくとも第2の検出器システムから信号を読み出し、それによって第2のエネルギーの陽子のそれぞれの軌跡及びエネルギーを表す測定データを得るように構成されたデータ収集システムを更に備える。本システムは、測定データを処理して画像再構成を実施し、それによって身体の一部分のコンピュータ断層画像を得るように構成されたプロセッサを更に備える。画像再構成は、総変動優秀化に基づく反復の投影ベース再構成アルゴリズムを含む。
【0018】
幾つかの実施態様において、本開示は、有形コンピュータ可読記憶媒体であって、該有形コンピュータ可読記憶媒体上に記憶されたコンピュータ実行可能命令を有し、該コンピュータ実行可能命令は、1つ又は複数のコンピューティングデバイスを有するコンピューティングシステムによって可読であり、コンピュータ実行可能命令は、複数の陽子に関するデータを取得することを含む動作を、コンピューティングシステムに実施させるように、該コンピューティングシステム上で実行可能である、有形コンピュータ可読記憶媒体に関する。データは、陽子のそれぞれについて第1のトラック及び第2のトラックに関する情報を含む。データは、第1のトラックと第2のトラックとの間での各陽子のエネルギー損失に関する情報を更に含む。この動作は、各陽子について、第1のトラックと第2のトラックとの間の経路を推定することを更に含む。この動作は、総変動優秀化に基づく反復の投影ベース再構成アルゴリズムを使用して、陽子のエネルギー損失及び経路に基づいて相対阻止能分布の断層撮影解析を実施することを更に含む。
【0019】
幾つかの実施態様において、本開示は、粒子放射線治療システムに関する。本システムは、第1の平均エネルギー及び第2の平均エネルギーを有するイオンビームを送出するように構成された粒子放射線送出システムを備える第1の平均エネルギーは、第1のブラッグピークが、身体の一部分の内部のターゲット領域内の場所で起こるように選択される。第2の平均エネルギーは、イオンビームが、身体の一部分を通過するように選択される。本システムは、ターゲット領域に対する第1のエネルギーのビームの送出を容易にするように構成された第1の検出器システムを更に備える。本システムは、第2のエネルギーを有し、身体の一部分を通過するイオンのそれぞれについて、身体の一部分の前及び後の軌跡、並びに、身体の一部分を通過した後のエネルギーを測定するように構成された第2の検出器システムを更に備える。本システムは、少なくとも第2の検出器システムから信号を読み出し、それによって第2のエネルギーのイオンのそれぞれの軌跡及びエネルギーを表す測定データを得るように構成されたデータ収集システムを更に備える。本システムは、測定データを処理して画像再構成を実施し、それによって身体の一部分のコンピュータ断層画像を得るように構成されたプロセッサを更に備える。画像再構成は、総変動優秀化に基づく反復の投影ベース再構成アルゴリズムを含む。
【0020】
幾つかの実施態様において、イオンは陽子を含む。幾つかの実施態様において、イオンは炭素イオンを含む。
【0021】
本開示を要約するために、本発明の或る特定の態様、利点及び新規の特徴が本明細書で述べられている。全てのこうした利点を、本発明の任意の特定の実施形態によって達成することが必ずしもできるわけではないことが理解される。そのため、本発明は、本明細書で教示又は示唆される可能性がある他の利点を必ずしも達成することなく、本明細書で教示される1つの利点又は利点の群を達成するか又は最適化するように、具現化又は実行することができる。
【図面の簡単な説明】
【0022】
【図1A】幾つかの実施態様において、陽子コンピュータ断層撮影(pCT)システムを撮像システムとして構成することができることを概略的に示す図である。
【図1B】幾つかの実施態様において、pCTシステムを、陽子治療システムを使用して患者の処置を容易にするように構成することができることを概略的に示す図である。
【図2A】光子治療及び陽子治療についての例示的な線量プロファイルを示す図であり、陽子は、ターゲットにされる所望の領域においてより選択的な線量送出を提供するように構成することができる。
【図2B】光子治療及び陽子治療についての例示的な線量プロファイルを示す図であり、陽子は、ターゲットにされる所望の領域においてより選択的な線量送出を提供するように構成することができる。
【図3A】所望のターゲットに対する陽子のブラッグピークの場所の間違った計算が、ターゲットの外の領域の望ましくない照射をもたらし得ることを示す図である。
【図3B】所望のターゲットに対する陽子のブラッグピークの場所の間違った計算が、ターゲットの外の領域の望ましくない照射をもたらし得ることを示す図である。
【図4】X線コンピュータ断層撮影(CT)を使用した所望のターゲットの識別に基づいて、陽子飛程を処置のためにどのように調整することができるかを概略的に示す図である。
【図5】関心体積を通過する陽子の特徴付けに基づいて断層撮影を実施するためのプロセスを示す図であり、こうした断層撮影から得られる情報は、所望のターゲットの識別等の多数のアプリケーションで利用することができる。
【図6】図5の断層撮影プロセスを容易にするための、陽子ビーム構成及びターゲットを通過する陽子の検出の例を概略的に示す図である。
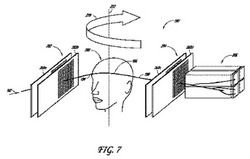
【図7】幾つかの実施態様において、pCTシステムが、ターゲットを通過する単一陽子を追跡し、該単一陽子のエネルギー損失を確定することが可能であるように構成された検出器を含むことができることを示す図であり、こうした測定は、ターゲットの少なくとも一部分の画像の断層再構成を可能にするために、ターゲットに対して複数の配向で実施することができる。
【図8】図7の例示的なpCT検出器を搭載するための例示的なプラットフォームを示す図である。
【図9】人間等の被検体のpCT撮像を実施するように構成された例示的なシステムを示す図である。
【図10】ターゲットの上流又は下流で単一陽子を追跡するように構成された例示的な追跡検出器の部分分解図である。
【図11】単一陽子のエネルギーを測定することが可能であるように構成された例示的な熱量計を示す図である。
【図12】ターゲット内の多重クーロン散乱(MCS)等の作用によって陽子の経路がどのように偏向し得るか、及び、最尤経路(MLP)をどのように推定することができるかの例を示す図である。
【図13】陽子経路が真っすぐであるという仮定に基づく再構成画像と陽子のMLPを組込んだ再構成画像との間の比較を示す図である。
【図14】オブジェクトを通過する陽子の測定に基づいて、オブジェクトを特徴付けするための例示的な再構成方法を概略的に示す図である。
【図15】図14の再構成方法に対する例示的な離散的手法を概略的に示す図である。
【図16】図15の離散的手法のより詳細な例を示す図である。
【図17】図15の離散的相互作用手法を記述するシステム行列を推定するために、陽子経路とターゲットのボクセルとの交差をどのように特徴付けることができるかの例を示す図である。
【図18】図15の離散的相互作用手法を記述するシステム行列を推定するために、陽子経路とターゲットのボクセルとの交差をどのように特徴付けることができるかの例を示す図である。
【図19A】シミュレートされたデータの再構成の例示的な結果を示す図である。
【図19B】シミュレートされたデータの再構成の例示的な結果を示す図である。
【図20A】陽子エネルギー測定が実質的に雑音なしであり、また、MLPが実質的に正確である理想的な再構成状況について複数の超平面を示す図であり、各超平面は、実質的に全ての超平面が、真のオブジェクト関数を表す点で交差するように、ターゲットの離散的ボクセルにおける陽子の相互作用を表すシステム行列による投影に対して、ターゲットのオブジェクト関数の変換を特徴付ける連立一次方程式の一方程式を表す。
【図20B】超スラブが真のオブジェクト関数を含む凸領域で交差することができるように、陽子測定が雑音なしではなく、かつ、MLPが正確でないより現実的な再構成状況について複数の超スラブを示す図である。
【図21A】様々な投影技法についての例示的な性能結果を示す図である。
【図21B】様々な投影技法についての例示的な性能結果を示す図である。
【図22】様々な投影技法についての例示的な性能結果を示す図である。
【図23】様々な投影技法についての例示的な性能結果を示す図である。
【図24】優秀化方法を利用して陽子CT投影解を得るために実装することができるプロセスを示す図である。
【図25】ターゲットオブジェクトを特徴付けるための、優れた陽子CT解を使用するために実装することができるプロセスを示す図である。
【図26A】優秀化方法を含む、種々の再構成スキームを調査するために陽子データをシミュレートするための例示的な陽子CT構成を示す図である。
【図26B】優秀化方法を含む、種々の再構成スキームを調査するために陽子データをシミュレートするための例示的な陽子CT構成を示す図である。
【図27】シミュレートされた陽子データに基づく種々の再構成スキームの例示的な結果を示す図である。
【図28A】シミュレートされた陽子データに基づく種々の再構成スキームの例示的な結果を示す図である。
【図28B】シミュレートされた陽子データに基づく種々の再構成スキームの例示的な結果を示す図である。
【図28C】シミュレートされた陽子データに基づく種々の再構成スキームの例示的な結果を示す図である。
【図29】シミュレートされた陽子データに基づく種々の再構成スキームの例示的な結果を示す図である。
【図30】実験的陽子データに適用される、選択された再構成スキームを使用して得られる例示的な陽子CT画像を示す図である。
【発明を実施するための形態】
【0023】
本明細書に設けられる表題は、たとえあっても、単に便宜上のものであり、必ずしも特許請求される本発明の範囲にも意味にも影響を及ぼさない。
【0024】
本明細書には、相互作用する放射線として陽子を使用して、コンピュータ断層撮影(CT)を実施するための方法及び関連するシステムが述べられる。本明細書の説明は陽子に関して行われるが、本開示の1つ又は複数の特徴は、正に帯電した他のイオンを使用したCTアプリケーションにも同様に実装することができることも理解されるであろう。
【0025】
図1Aは、幾つかの実施形態において、陽子コンピュータ断層撮影(pCT)オペレーションを実施し、オブジェクト110の1つ又は複数の部分のCT画像として表すことができるデータを与えるように撮像システム100を構成することができることを示す。撮像システム100は、オブジェクト110に陽子ビームを送出するように構成された陽子ビームコンポーネント102を含むことができる。エネルギー、方向及び強度等の陽子ビームの種々のパラメータを制御することは、複数の既知の方法で達成することができる。
【0026】
撮像システム100は、オブジェクト110に入射する陽子及びオブジェクトを通過した陽子を特徴付けるように構成された検出器コンポーネント104を更に含むことができる。幾つかの実施態様では、こうした検出器コンポーネント104は、単一陽子を特徴付けることが可能であるように構成することができる。陽子のこうした特徴付けを容易にすることができるデバイスの例は、本明細書でより詳細に述べられる。
【0027】
撮像システム100は、CT解析を容易にするために、検出器コンポーネント104から信号を読出すように構成されたデータ収集(DAQ)コンポーネント106を更に含むことができる。DAQコンポーネント106によって実施される信号処理量は、変動し得る。
【0028】
幾つかの実施態様では、種々の検出器からの信号は、1つ又は複数のアナログ/デジタル変換器(ADC)によってデジタル信号に変換することができ、こうしたデジタル信号は、制御コンポーネント112の制御下で読み出すことができる。イベントトリガー、イベント信号のタイミング及び読出し、並びに検出器のリセット等の種々の制御パラメータも、制御コンポーネント112が制御することができる。
【0029】
幾つかの実施態様では、撮像システム100は、デジタル化信号を受信し、オブジェクト110の上流及び下流での陽子の追跡、並びに、オブジェクト110を通過した下流の陽子のエネルギーの計算等の解析を実施するように構成されるプロセッサ108を更に含むことができる。幾つかの実施態様では、断層再構成処理もまた、プロセッサ108によって実施することができる。他の実施態様では、こうした断層再構成処理は、別個のプロセッサによって実施することができる。
【0030】
幾つかの実施態様では、撮像システム100は、システム100の1つ又は複数のコンポーネントのオペレーションを容易にする情報及び/又は実行可能命令を記憶するように構成されたコンピュータ可読媒体114を更に含むことができる。幾つかの実施態様では、コンピュータ可読媒体114は、本明細書で述べる1つ又は複数の再構成プロセスの実施を容易にする情報及び/又は実行可能命令を含むことができる。幾つかの実施態様では、こうした情報及び/又は実行可能命令は、一時的でない方法で記憶することができる。
【0031】
幾つかの実施態様では、本開示の1つ又は複数の特徴は、陽子線治療システム又は炭素ビーム治療システム等の放射線治療システム120に組込むことができる。治療システム120は、患者130に陽子線又は炭素イオンビームを送出するように構成された陽子線コンポーネント又は炭素ビームコンポーネント122を含むことができる。陽子又は炭素イオンのこうしたビームは、患者に対する治療効果をもたらすように構成することができる。或る特定の実施態様では、陽子ビームコンポーネント122は、図1Aを参照して上述したように、断層解析を可能にするために、患者を通過することができる陽子ビームを与えるようにも構成することができる。こうしたビームを提供することができる方法の例は、本明細書で更に詳細に述べられる。
【0032】
撮像システム120は、陽子ビームの処置利用を容易にするように構成された検出器コンポーネント124を更に含むことができる。こうした検出器コンポーネント124は、エネルギー、方向及び強度等の所望のパラメータを用いて患者130に入射する陽子を特徴付けるように構成されるデバイスを含むことができる。こうしたデバイスは、複数の既知の方法で実装することができる。
【0033】
幾つかの実施態様では、検出器コンポーネント124は、図1Aを参照して述べたpCT撮像機能のようなpCT撮像機能を容易にするように構成されるデバイスを更に含むことができる。幾つかの実施形態では、治療に関連する検出デバイスのうちの少なくとも幾つかは、pCT撮像のためにも利用することができる。例えば、患者の上流のビーム検出器は、撮像モードのオペレーション中に患者に入射する個々の陽子を特徴付けるために利用することができる。
【0034】
撮像システム120は、治療モード及び/又は撮像モードのオペレーションを容易にするように構成されたデータ収集(DAQ)コンポーネント126と、制御コンポーネント132と、プロセッサコンポーネント128と、コンピュータ可読媒体コンポーネント134とを更に含むことができる。
【0035】
適切に構成された陽子又は炭素イオン放射線(すなわち、帯電した粒子放射線)は、或る特定のがん処置等の治療アプリケーションにおいて多くの利益を提供することができる。こうした利益のうちの1つの利益は、所与の物質内での陽子の移動の終りにおける急激なエネルギー損失による可能性がある。こうした急激なエネルギー損失は、ブラッグピークと呼ばれる比較的急峻なピークを有し、(同じビームエネルギーを有する)粒子のうちのほんの僅かの粒子が、こうした深さを超えて貫入する。こうしたブラッグピークの深さの位置は、特定のビームエネルギーに依存し得る。一般に、より深いブラッグピークは、より高いエネルギー粒子ビームによって達成することができる。治療に使用される陽子は、約70MeV/原子質量単位〜250MeV/原子質量単位の範囲のエネルギーを有することができ、炭素イオンは、430MeV/原子質量単位までの範囲のエネルギーを有することができる。
【0036】
図2Aは、エネルギー陽子が所与の物質(例えば、組織)内で移動するときの、深さの関数としてのエネルギー損失プロファイル142のブラッグピーク144の例を示す。比較すると、電磁放射線(例えば、X線又はガンマ線)についての相対的線量プロファイル140は、最大まで比較的急峻に上昇し、それに続いて、深さの関数として徐々に減少している。したがって、陽子ベース放射線は、陽子と炭素イオンの使用によって提供される同様の終了範囲制御を提供しない。
【0037】
図2Bは、複数の初期(pristine)ブラッグピークが結合されて、累積線量プロファイル152の拡大ブラッグピーク(spread out Brag Peak)(SOBP)154をもたらすことができることを示す。こうした初期ブラッグピークは、同じ体積を、異なるエネルギーを有する陽子ビームに晒すことによって達成することができる。結果として得られる拡大ブラッグピーク154の位置は、ターゲット領域150の深さ境界にオーバーラップするように選択することができる。ビームエネルギーが適切に選択される場合、拡大ブラッグピークは、ターゲット領域の遠位境界を超えると急激に降下し得る。
【0038】
上記に基づいて、ターゲット領域の深さ境界と、拡大ブラッグピークとを適切に一致させることは、粒子治療の重要な考慮事項であり得る。拡大ブラッグピークの遠位部分が、図3Aの例の場合のように深すぎる場合、不必要かつ有害な放射線線量(例えば、ブラッグピーク164のかなりの部分)が、ターゲット領域160の遠位境界を越えた領域に提供される。拡大ブラッグピークの近位部分が、図3Bの例の場合のように浅すぎる場合、不必要で余分な放射線線量(例えば、ブラッグピーク162のかなりの部分)が、ターゲット領域160の近位境界の前の領域に提供される。他方で、深すぎる拡大ブラッグピークの近位部分及び/又は浅すぎる拡大ブラッグピークの遠位部分は、ターゲット領域の或る特定の部分が適切に照射されないことをもたらす場合がある。
【0039】
所与の媒体内での陽子貫入深さの上記の不確実性は、媒体と異なるように相互作用する異なるプローブ放射線による媒体の特徴付けからもたらされる可能性がある。図4は、所与のエネルギーを有し、所与の媒体を横切る陽子ビームの飛程を求めるために使用することができる一般的なプロセスを示す。同様のプロセスは、炭素イオンビームについて適用することができ、その差は、陽子の相対阻止能の代わりに、炭素イオンの相対阻止能(陽子についての陽子阻止能に原子数比の2乗(ZC/Zp)2=36を乗算することによって推定することができる)が使用されることである。オブジェクトの減衰係数測定に基づいて画像を取得するために、X線CTをオブジェクト(例えば、患者)に対して実施することができる(ブロック150)。こうした測定は、ハウンスフィールド単位スケールに変換することができる(ブロック152)。媒体内での陽子又は炭素イオンの、計算された相対阻止能は、ハウンスフィールドスケール測定に基づいて取得することができる(ブロック154)。陽子又は炭素イオンの飛程は、陽子又は炭素イオンについて、ビームエネルギー及び物質の相対阻止能の関数として表すことができるため、計算された陽子又は炭素イオンの飛程を取得することができる(ブロック156)。
【0040】
X線CT測定から陽子飛程を計算する上記のプロセスは、陽子の飛程又は炭素イオンの飛程の約3.5%の不確実性をもたらす可能性がある。こうした相対的な不確実性は、人間の身体の様々な部分についての様々な距離に等しいとすることができる。例えば、3.5%の相対的不確実性は、脳で約3mm〜5mmに等しく、骨盤で約10mm〜12mmに等しい。更なる不確実性が、未知の密度を有する物質の存在及びX線CT画像のストリーク状アーティファクトによって導入され得る。
【0041】
幾つかの実施態様では、本明細書に述べるようなpCT技法に基づく陽子又は炭素イオンの飛程の確定によって、飛程の不確実性を陽子の飛程の約1%以下に低減することができる。図5は、陽子コンピュータ断層撮影を実施するために実装することができるプロセス170を示す。図6は、図5のプロセス170のために実装することができる例示的な構成を示す。
【0042】
ブロック172において、陽子ビームを、関心体積を有するオブジェクトに提供することができる。幾つかの実施態様では、ビームは、ビーム内の陽子のかなりの部分がオブジェクトを通過するように構成することができる。例えば、また、図6に示すように、陽子ビームには、結果として得られるブラッグピーク182が関心体積の遠位境界を過ぎた所で起こるようにエネルギーを提供することができる。幾つかの実施態様では、撮像されるオブジェクトは、関心体積を画定することができる。こうした状況では、陽子は、オブジェクト全体を通過し、オブジェクトの下流で検出することができる。
【0043】
ブロック174において、体積を通過する複数の陽子のそれぞれを追跡することができる。例えば、図6に示すように、こうした追跡は、関心体積180の上流及び下流にある陽子の追跡を含むことができる。こうした追跡の例は、本明細書でより詳細に述べられる。
【0044】
ブロック176において、追跡された各陽子のエネルギー損失を測定することができる。例えば、図6に示すように、こうしたエネルギー測定は、体積180の上流にある陽子についての平均ビームエネルギーの測定と、熱量計等のエネルギー検出器による、下流の各陽子の測定とを含むことができる。こうしたエネルギー測定の例は、本明細書でより詳細に述べられる。
【0045】
ブロック178において、コンピュータ断層撮影解析を、陽子の追跡情報及びエネルギー損失情報に基づいて実施することができる。例えば、図6に示すように、こうしたCT解析は、複数の異なる向きで体積180に入射し(184)、体積180を通過する(186)陽子に関するこうした情報を測定することによって容易にすることができる。こうした向きの変化の例は本明細書でより詳細に述べられる。
【0046】
図7は、幾つかの実施形態において、検出器の組立体を、オブジェクト(例えば、患者の一部分)200に入射する個々の陽子及びオブジェクト200を通過した後の個々の陽子の測定を可能にするように構成することができることを示す。例えば、単一陽子192が、オブジェクト200に入射し(194)、オブジェクト200を横切り(196)、オブジェクト200を通過した(198)として示される。
【0047】
幾つかの実施態様では、上流検出器202は、陽子192について入射トラック(194)情報を提供することができ、下流検出器204は、陽子192について下流トラック(198)情報を提供することができる。本明細書で述べるように、陽子が、オブジェクト200を横切るときにとる経路196は、CT解析を容易にするために推定することができる。
【0048】
上流追跡検出器202及び下流追跡検出器204は、複数の方法で実装することができる。上流追跡検出器202は、陽子がオブジェクト200に入るときの陽子の空間ベクトル及び場所の確定を可能にするように構成することができる。同様に、下流追跡検出器204は、陽子がオブジェクト200を出るときの陽子の空間ベクトル及び場所の確定を可能にするように構成することができる。こうした情報に基づいて、横断経路196を、本明細書で述べるように推定することができる。
【0049】
幾つかの実施態様では、上流追跡検出器202及び下流追跡検出器204のそれぞれは2つ以上の2D位置感応性検出面を含むことができる。例えば、上流検出器202は、2つの2D位置感応性検出面202a、202bを含むことができ、下流検出器204は、2つの2D位置感応性検出面204a、204bを含むことができる。2D位置感応性検出面202a、202b、204a、204bのそれぞれは、例えばマイクロストリップ検出器(例えば、シリコンストリップ検出器)を含む、複数の方法で実装されたX位置感応性面及びY位置感応性面を含むことができる。(例えば、高計数環境で)追跡が不明瞭である可能性がある幾つかの状況では、更なる位置感応性面(例えば、U及び/又はV面)を付加することができるか、又は、より高速な検出器及び/又は読出しシステムを、こうした不明瞭さを低減するために使用することができる。
【0050】
図7を参照すると、検出器の組立体は、下流の陽子のエネルギーを検出するように構成されたエネルギー検出器206を更に含むことができる。こうしたエネルギー検出器は、例えば、多結晶ベース熱量計を含む、複数の方法で実装することができる。こうしたエネルギー検出器の例は、本明細書でより詳細に述べられる。
【0051】
或る特定の実施態様では、複数の他の検出器及び/又はデバイスを、種々の機能を提供するために含めることができる。例えば、2重粒子又は入射ストレイ(stray)粒子を含むイベントを識別し拒否し得るビーム規定カウンターを含めることができる。別の例では、偽信号を拒絶しながら、良好なイベントを規定しトリガーするように構成されたカウンター及び回路も含めることができる。
【0052】
図7を参照すると、検出器のこうした組立体及び/又はオブジェクト200は、CT解析のために複数の向きで陽子データを取得することを容易にするために、選択された軸の回りに回転させることができる。例えば、検出器の組立体は、オブジェクト200の軸212の回りに一緒に回転する(矢印210)ように構成することができる。
【0053】
他の例では、検出器、オブジェクト、又はそれらの何らかの組合せが、CT機能を容易にするために、回転及び/又は並進することができることが理解されるであろう。例えば、図8は、検出器(例えば、2D位置感応性検出器230、232、234、236及びエネルギー検出器238)の組立体を、実質的に固定してプラットフォーム226に搭載し、陽子ビーム250を受信して下流の陽子を検出するように向けることができる構成220を示す。特徴付けされるオブジェクト222は、CT機能を提供するために、軸の回りのオブジェクト222の回転を可能にするように、搭載構造224に搭載することができる。オブジェクトが回転するこうした構成は、オブジェクト222が無生物オブジェクト(例えば、ファントム)であり、かつ、陽子ビームが実質的に固定方向を有する場合に、より適切であり得る。
【0054】
別の例では、図9は、オブジェクト262(例えば、患者)が実質的に静止しており、かつ、検出器(例えば、上流追跡検出器272、下流追跡検出器274、及びエネルギー検出器276)の組立体を、オブジェクト262によって規定される軸280の回りに回転するように構成することができる構成260を示す。
【0055】
例示的な検出器272、274、276は、軸280の回りの検出器組立体の回転(矢印282)を可能にする回転可能構造270に搭載することができる。静止オブジェクト262は、例えば、安定した構造266に搭載された支持構造264によって達成することができる。幾つかの実施形態では、支持構造264は、陽子290が上流検出器272と下流検出器274との間で移動する領域を出入りするオブジェクトの移動を可能にするように構成することができる。検出器組立体がオブジェクトの回りに回転するこうした構成は、オブジェクト262が、人間の患者等の生き物である場合により適切であり得る。
【0056】
幾つかの実施態様では、図9の例示的な構成260の検出器の一部又は全ては、処置ガントリ設計を有する陽子治療システムのような陽子治療システムに組込むことができる。こうした設計では、患者を、ビームラインの内外に移動させることができる。ビームラインは、処置陽子の所望の送出のために患者の回りに回転することができる。
【0057】
こうしたシステムの場合、上流検出器と、下流検出器と、エネルギー検出器とは、ビームラインとともに回転するように回転可能構造に搭載することができる。こうした検出器は、所定場所に固定することができるか、又は、治療オペレーションを妨げないように、格納可能とすることができる。幾つかの実施形態では、治療システムのビーム制御デバイスは、上流追跡検出器に関連する機能の一部又は全てを提供することができる。
【0058】
図10は、図7〜図9を参照して述べた上流追跡検出器又は下流追跡検出器として利用することができる例示的なトラッカモジュール300を示す。本明細書で開示される多数のpCT結果が、こうしたデバイスを使用して得られた。図示するように、トラッカモジュール300は、2つ以上の2D位置感応性検出器を保持するように構成されたハウジング302を含むことができる。こうした2D位置感応性検出器306のうちの1つが、部分的に除去されて示され、他の2D位置感応性検出器は、図10では取除かれている。
【0059】
2D位置感応性検出器306は、アクティブエリア308(例えば、シリコンストリップ検出素子を有する長方形)と、検出素子を制御し、検出素子から信号を読出すための回路310と、電力、制御信号、読出し信号等を供給するためのインタフェース312とを含むことができる。
【0060】
ハウジング302は、相互作用の確率が比較的低い状態での陽子の通過を可能にするために、(設置すると)2D位置感応性検出器306のアクティブエリア308に好ましくは整列する窓304を含むことができる。必要であるとき、こうした窓は、マイラー等の物質の薄いシートを含むことができる。
【0061】
ハウジング302は、モジュール300が、(例えば、オブジェクトが回転可能である場合)静止状態になるか又はオブジェクト(図示せず)の回りに回転可能であることを可能にするために、モジュール300を支持構造に搭載することを可能にするように構成することができる。
【0062】
図11は、図7〜図9を参照して述べた例で利用することができる例示的なエネルギー検出器320を示す。本明細書で開示される複数のpCT結果が、こうしたデバイスを使用して得られた。図示するように、エネルギー検出器320は、分割型(segmented)エネルギー検出能力を提供するように配列された複数の検出器結晶322(例えば、CsI結晶)を含むことができる。図示の例では、結晶322は、グリッド様分割を提供するために、グリッドアレイで詰めることができる。結晶322の前面の寸法及び結晶322の深さ等の設計パラメータは、下流の陽子の予想されるエネルギー範囲及び強度に対応するように選択することができる。
【0063】
図11を参照すると、結晶322の後端が、光検出器326に結合されているものとして示される。こうした光検出器は、例えば、種々のタイプの光電子増倍管の使用を含む多数の方法で実装することができる。例えば、下流の陽子の飛程を検出するように構成された、固体検出器又は有機シンチレータ若しくは無機シンチレータの積重体を含む多数の他のタイプのエネルギー検出器も利用することができる。
【0064】
図11では、結晶322は、ハウジング324内に詰められているものとして示される。こうしたハウジングは、エネルギー検出器320が、(例えば、オブジェクトが回転可能である場合)静止状態になるか又はオブジェクト(図示せず)の回りに回転可能であることを可能にするために、エネルギー検出器320を支持構造に搭載することを可能にするように構成することができる。
【0065】
本明細書で述べるように、特徴付けされるオブジェクト内での陽子の相互作用は通常、入射方向からの方向変化及び入射エネルギーからのエネルギー損失をそれぞれもたらす。陽子は、オブジェクトを通過するとき、ターゲット原子の核ポテンシャルにおける散乱によって、複数回の小角偏向を受ける可能性があり、こうした偏向は、元の方向からの、実質的にランダムな巨視的逸脱をもたらす可能性がある。幾つかの状況では、こうした逸脱は、数度程度の大きさである可能性があり、オブジェクトの遠位端上で(入口点及び入口方向の直線投影に対して)出口点の著しい(例えば、最大数ミリメートルの)変位をもたらす。
【0066】
図12は、陽子が、入射方向400及び入口点402でオブジェクト410を横切り、出射方向404及び出口点406で出る際の、こうした小角偏向の例の2次元表現を示す。この例では、出射方向は、入る方向から逸脱しており、同様に、出口点406は、陽子が、直線で移動する場合に到達することになる投影点408からシフトしている。
【0067】
こうした多重クーロン散乱(MCS)作用は、陽子の軌跡Lに不確実性を生じる可能性がある。こうした軌跡は、陽子CT画像の空間分解能に寄与する可能性があるため、軌跡の正確な推定が望ましい。幾つかのターゲットオブジェクトにおいて、オブジェクト内での陽子の実際の経路に関する直接的な情報は存在しない。しかし、オブジェクトの前及び後の陽子の経路について知識が与えられると、オブジェクト内での最尤経路を推定するための多数の技法が存在する。例えば、準解析的計算を、複数散乱のガウス近似に関して実施することができる。別の例では、モンテカルロシミュレーションのセットを、オブジェクトのサイズ、オブジェクトの物質、ビームエネルギー、並びに検出される陽子経路及びエネルギー等の因子を含むことができる所与の構成に基づいて実施することができる。
【0068】
図12では、入射経路400及び出射経路404に対応する最尤経路(MLP)は、曲線420として示され、こうした軌跡は、CT再構成に使用することができる。
【0069】
幾つかの実施態様では、多重クーロン散乱等の作用から生じる上記の経路逸脱は、一部の画像再構成アルゴリズムの効果を減少させる可能性がある。例えば、フィルタ補正逆投影(filtered back projection)(FBP)は、X線CTシステムで使用される一般的な再構成方法であり、特徴付けられるオブジェクトの内部で、光子が直線上に進むと仮定する。
【0070】
こうした方法が、陽子CT画像再構成に利用されるとき、画像品質が、大幅に悪化する。図13は、陽子CT画像を示し、ここで、上側画像は、FBP法を使用して得られ、下側画像は、MLPを組込むことによって得られた。一般に、FBP画像は、MLP画像より品質が低いことがわかる。例えば、FBP画像のかなりの部分がぼけている。
【0071】
陽子は、その軌跡Lに沿って媒体を横切るにつれ、媒体との相互作用によるエネルギー損失を被る。以下の積分は、このエネルギー損失を含む。
【0072】
【数1】

【0073】
ここで、Ein及びEoutは、それぞれ、入射エネルギー及び出射エネルギーを表し、Swater(E)は、水中でのエネルギー依存の陽子阻止能関数を表す。さらに、こうした積分は、
【0074】
【数2】
【0075】
となるように、陽子経路に沿う、相対電子密度又は相対陽子阻止能の積分に実質的に等しくなるように設定することができる。幾つかの実施態様では、陽子経路は、最尤経路(MLP)として近似することができる。
【0076】
所与の被検出陽子の場合、方程式1の左辺は、陽子の入射エネルギー及び出射エネルギーが測定されるため、求めることができる。そのため、陽子のMLPを知ることによって、オブジェクトの電子密度に密接に関連する相対阻止能ηeをMLPに沿って計算することが可能になる。十分な数のこうした陽子が与えられると、相対阻止能関数ηeを、特徴付けされるオブジェクト内の関心領域について計算することができる。こうした関数ηeは、高品質画像の生成を可能にするために、十分に詳細に求めることができる。
【0077】
図14は、幾つかの実施態様において、出力陽子504を得るために、オブジェクト500を横切り、オブジェクト500と相互作用する複数の入力陽子502を変換510 M・x=gとして表すことができることを示し、ここで、xは、オブジェクトに関連する相互作用パラメータ(例えば、電子密度又は相対阻止能(RSP)等の電子密度ベース量)の3次元分布であり、Mは、gを得るためにxに作用する作用素であり、gは、測定データを表す。そのため、オブジェクト関数xは、x=M−1・gとして求めることができ、ここで、M−1はMの逆作用素である。本明細書で述べるように、作用素が、例えば正方行列であるとき、作用素の逆が適切であり得る。こうした正方行列が要件でないことが理解されるであろう。作用素行列が、より一般的な長方形行列である状況では、オブジェクト関数xは、x=M†・gとして求めることができ、M†(「Mダガー」)は、Mの共役転置である。同様な表記を本明細書で述べる他の作用素(例えば、図15の作用素A)に適用することができることが理解されるであろう。
【0078】
図15は、幾つかの実施態様において、図14の変換の一般的な形態を、オブジェクト520がベクトルにデジタル化される離散的変換522として近似することができることを示す。こうした変換は、A・x=bとして表すことができ、ここで、xは、離散的なオブジェクトベクトルであり、Aは、bを得るためにxに作用する作用素であり、bは、測定データのベクトルを表す。そのため、オブジェクトベクトルxは、x=A−1・bとして求めることができ、ここで、A−1はAの逆作用素である。
【0079】
幾つかの実施態様では、図15の離散的変換522は、オブジェクトベクトルxが、n個の要素x1、x2、x3、...、xnを有する列ベクトルであり、測定ベクトルbが、m個の要素b1、b2、b3、...、bmを有する列ベクトルであり、変換作用素Aが、m×n行列であるような、連立一次方程式を表すことができる。
【0080】
図16は、オブジェクトベクトルxとして表すことができるデジタル化されたオブジェクト520の例を示す。オブジェクト520は、複数のボクセル530を有するものとして示される。i番目の陽子532は、その経路(例えばMLP)に沿って複数のボクセル530に交差するように、デジタル化されたオブジェクト520を横切るものとして示される。陽子532は、測定ベクトルbのi番目の値を得るために、オブジェクト520を出て、検出器によって測定されるものとして更に示される。幾つかの実施態様では、変換行列Aの要素aijは、i番目の陽子とオブジェクトベクトルxのj番目のボクセルとの交差長等の相互作用パラメータを表すことができる。
【0081】
幾つかの実施態様では、変換行列Aは、交差長(aijs)の推定を容易にするために、複数の方法で構成することができる。例えば、最尤経路(MLP)は、ボクセルサイズに対するステップサイズ(例えば、半ボクセルステップ等のボクセル以下のステップサイズ)で離散化することができる。
【0082】
幾つかの実施態様では、交差長aijは、複数の方法で推定することができる。例えば、MLPと交差する任意のボクセルに、交差長について一定値を割り当てることができる。別の例では、所与のボクセルと交差するMLPのコードの長さを計算し、そのボクセルに割り当てることができる。更に別の例では、平均有効コード長係数に、MLPに沿うボクセルの全てに割り当てられた一定値を乗算することができ、こうした係数は、オブジェクトグリッド上での陽子の入射角度に基づくことができる。
【0083】
図17は、上記の平均有効コード長係数の例示的なプロット540を示し、示す入射角度は、水平入射がゼロの入射角度を有するように配向されたオブジェクトグリッド520(図18)を基準とする。こうした例では、水平交差は、1の係数を与えられ、45度交差は、最小値を与えられる。こうした割当ては、角度の付いた交差(例えば、矢印542によって示される区画)が、たとえ全対角長がより長くても、横寸法(例えば、正方ボクセルの水平寸法)より短い可能性が高いことを考慮する。幾つかの実施態様では、上記の単一パラメータ(入射角度)に基づく調整は、望ましいことには、処理時間を減少させることができる。
【0084】
図19A及び図19Bは、上記の交差長推定の使用から得ることができる画像品質及び阻止能特徴付けの性能の例を示す。図19Aでは、左上画像は、2次元陽子ビームを使用したモンテカルロシミュレーションから得られるファントムの再構成画像である。右上画像は、一定相互作用長手法を使用したファントムの再構成画像である。左下は、有効平均コード長係数手法についてのものであり、右下は、ボクセルごとに計算したコード長手法についてのものである。
【0085】
一定相互作用長手法から得られる画像は、有効平均コード長係数手法及びボクセルごとに計算したコード長手法を使用して得られた画像に比べて、比較的雑音が多いことが示される。画像品質は別として、また、図19Bに示すように、有効平均コード長係数手法及びボクセルごとに計算したコード長手法は、一定相互作用長手法の再現に比べて、ファントム内の種々の特徴部の相対阻止能のより正確な再現をもたらす。
【0086】
幾つかの実施態様では、図15及び図16を参照して本明細書で述べる連立一次方程式(例えば、A・x=b)は、次のように表すことができる。ベクトルbは、bが、m個の要素bi(i=1〜m)を有するように、m個の陽子について測定(例えば、エネルギー損失)ベクトルを表すことができる。ベクトルxは、特徴付けされるオブジェクトのパラメータ(例えば、相対阻止能、RSP)の値を有する未知の画像ベクトルとすることができる。そのため、そのMLPに沿ってオブジェクトを横切り、測定されるエネルギー損失をもたらすi番目の陽子に関して、ベクトルbのi番目の要素、すなわちbiは、MLPに沿う積分されたRSPを表す。こうした量は、例えば既知の厚さ及び相対阻止能の物質のブロックを横切った陽子に対するエネルギー検出器の応答を較正することによって測定することもできるし、
【0087】
【数3】
【0088】
になるように、方程式1の左辺によって数値的に計算することもできる。ここで、Swaterは、
【0089】
【数4】
【0090】
によって与えられる水中の陽子阻止能を表す。方程式3では、reは、古典電子半径であり、meは電子質量であり、ηwater及びIwaterは、それぞれ水の電子密度及び平均イオン化ポテンシャルであり、βは光の速度cに対する陽子の速度である。
【0091】
幾つかの実施態様では、画像ベクトルxは、反復再構成技法を利用することによって解くことができるか、又は推定することができる。説明のために、集合Iが、I={1,2,...,m}であるような、m個の指数を有すると仮定し、集合{Hi:iはIの要素}が、n次元実数座標空間Rn内の超平面の有限族であるとする。反復プロセス中にベクトルxkが投影される集合Hiは、
【0092】
【数5】
【0093】
であるような、m×n線形系Ax=bのi番目の行によって規定することができる。方程式4では、aiは、AT(Aの転置)のi番目の列ベクトルであり、それにより、その成分は、Aのi番目の行を占める。
【0094】
幾つかの実施態様では、方程式4のi番目の超平面Hiを満たすオブジェクト関数Siは、コスト又はメリット関数
【0095】
【数6】
【0096】
がゼロ以下である制約を有する、x(Rnの要素(複数の場合もあり))の集合として表すことができる。ここで、εiは、超スラブの半値幅を規定する閾値パラメータである。全体のオブジェクト関数Sは、その後、S=∩Si(i=1〜m)であるようなm個のSi関数の交差として求めることができる。
【0097】
陽子エネルギー測定が実質的に雑音なしであり、かつ、MLPが実質的に正確である理想的な状況では、こうしたオブジェクト関数Sは、超平面の全てが交差する単一点として表すことができる。こうした理想的な状況が図20Aに示され、図20Aでは、例示的な超平面600が、「X」として示す点で交差することが示される。こうした理想的な状況では、閾値パラメータεiは、実質的にゼロとすることができ、<ai,x>=bi(gi(x)=0)である実質的に正確な解を得ることができる。
【0098】
より現実的な状況では、陽子エネルギー測定は、雑音なしの状態ではなく、かつ、MLPは正確でない。こうした状況では、超平面は、平面の代わりに、スラブとして示され、それにより、こうした超スラブの交差は、超スラブが全てオーバーラップする領域をもたらすことができる。こうした状況は図20Bに示され、図20Bでは、例示的な超スラブ610が、「Q」として示す領域で交差することが示される。こうした状況では、閾値パラメータεiは、ゼロより大きく、かつ、方程式5のメリット関数を満たす許容可能な解の外側境界を規定する量とすることができる。
【0099】
図20Bの例では、撮像される媒体を特徴付ける所望のオブジェクト関数Sは、オーバーラップ領域Q内に存在することができる。より一般的には、撮像される媒体を特徴付ける所望のオブジェクト関数Sは、制約された空間ε={εi}内に存在することができる。
【0100】
幾つかの実施態様では、こうした所望のオブジェクト関数は、最小化等の最適化技法によって得ることができる。最適化は、一部の撮像アプリケーションで一定の利点を有し得るが、欠点も有し得る。例えば、メリット関数によって決定される最適解は、必ずしも対象となる真のオブジェクトデータを最も良く再現する解ではない場合がある。こうした作用は、例えば、採集されたデータの不整合性及び/又はメリット関数の選択によって生じる可能性がある。さらに、メリット関数のこうした選択は、不適切であることがある引数によって、及び/又は、結果として得られる最適化問題を計算的に処理できること若しくはできないことによって影響を受ける可能性がある。幾つかの実施態様では、最適化手法は、メモリ及び処理パワー等の計算処理リソースの制限によって非実用的である可能性もある。
【0101】
幾つかの実施態様では、陽子CT画像再構成は、実行可能性探求法のうちの1つ又は複数を利用して実施することができる。凸集合の有限族の交差(例えば、図20Bの超スラブ610の集合から得られる例示的な交差領域Q)をもたらす撮像状況の場合、複数の解が存在し得る。凸実行可能性問題(CFP)法では、こうした複数の解の中の解が探索されて得られ、こうした解が、交差領域内の点に対応することができる。
【0102】
CFP法に基づく画像再構成(例えば、pCT再構成)の場合、所望の性能は、効率的な実行可能性探求投影法の使用、及び、所与のメリット関数の減少した値を有する実行可能解の発見等の因子に基づくことができる。幾つかの実施態様では、優秀化(superiorization)は、対応するCFP集合の実行可能解でもある、或るメリット関数に関する優れた解を発見するプロセスを指すことができる。優れた解は、1がそれに対して優れているメリット関数の値が(the value of the merit function, with respect to which one superiorizes)、優秀化プロセスが適用されていない場合に達するであろう実行可能点で、この関数の値より小さい(必ずしも最小ではないが)、CFPの実行可能解とすることができる。
【0103】
幾つかの実施態様では、効率的な実行可能性探求能力を提供する上記の投影方法は、制限がある摂動弾力性(perturbation resilience)を含む1つ又は複数の因子に基づいて選択することができる。実行可能点への収束性を失うことなく、所与の投影アルゴリズムに摂動を与えることができることは、メリット関数に関して、摂動なしの状態で到達するであろう別の実行可能点より優れている実行可能点に向かってのアルゴリズムの操向を可能にすることができる。
【0104】
いかなる特定の理論によって拘束されることを所望することも意図することもなく、アルゴリズムPは、以下が満たされる場合、制限がある摂動に対して弾力性があると言うことができる。シーケンス
【0105】
【数7】
【0106】
(xから始めて、Pの順次的な反復適用によって得られる)が、n次元実数座標空間Rn内の全てのxについて問題Qの解に収束する場合、Rn内の点の任意のシーケンス
【0107】
【数8】
【0108】
も、Qの解に収束する。ただし、全てのk≧0について、
【0109】
【数9】
【0110】
であるときに限る。ここで、βkvkは、制限がある摂動であり、βkが、
【0111】
【数10】
【0112】
であるような非負の実数であり、ベクトルのシーケンス
【0113】
【数11】
【0114】
が制限されることを意味する。
【0115】
幾つかの実施態様では、優秀化方法は、次のように利用することができる。制約型最小化問題を解こうとする代わりに、優秀化手法は、幾つかの実行可能探求アルゴリズムに摂動を与え得るため、実行可能性に対するその収束性を失うことなく、減少した目的関数値(複数の場合もあり)を有する1つの点(又は複数の点)が得られることになる。そのため、幾つかの実施態様では、pCT撮像のための1つ又は複数の実行可能探求投影アルゴリズムは、こうした摂動弾力性特性を含むことができるか、又は含むように適合することができる。こうした能力を含むように適合することができるこうした1つ又は複数の摂動弾力性投影アルゴリズムの非制限的な例は、本明細書でより詳細に述べられる。
【0116】
出願人は、優秀化方法のために利用することができる複数の投影アルゴリズムを解析し、こうした解析の幾つかの結果が図21〜図23を参照して述べられる。図21A及び図21Bは、例示的な投影アルゴリズムART(650)、BIP(652)、SAP(654)、OSART(656)、BICAV(658)、DROP(660)、及びCARP(662)を使用した、シミュレートされたGEANT4陽子相互作用の再構成についての性能曲線(例えば、反復サイクル数の関数としての相対誤差)を示す。図22は、陽子相互作用のシミュレーションで使用されたファントムの画像(上の行の第1列)、及び上記の投影アルゴリズムを使用した再構成画像を示す。図23は、例示的な投影アルゴリズム(DROP)の異なる数の反復によって得られた画像の比較を示し、幾つかの状況では、或る点を超える更なる反復は、必ずしも画像品質を大幅に上げないことを示す。
【0117】
図21〜図23の例示的な性能関連プロット及び性能関連画像は、既知の最適化技法を使用して得られた。これらの例示的な性能関連図に対する更なる参照が、例示的な投影アルゴリズムの説明においてなされる。
【0118】
幾つかの実施態様では、摂動弾力性投影アルゴリズムは、当業者に知られている、ART(代数再構成技法)等の順次投影アルゴリズムとすることができる。陽子CT再構成に適用されるARTアルゴリズムは、その順次的性質により遅い可能性がある。ARTアルゴリズムに関する更なる詳細は、例えば、G.T.Herman「Fundamentals of Computerized Tomography: Image Reconstruction from Projections」(2nded., Springer, New York, NY, 2009)において見出すことができる。図21A及び図22では、例示的なGEANT4シミュレーションに適用されるART投影アルゴリズムは、曲線650及び上の行の第2列の画像として示される。
【0119】
幾つかの実施態様では、ARTアルゴリズムは、同時ART(SART)アルゴリズムとして修正することができる。幾つかの実施態様では、SARTアルゴリズム等のARTベースのアルゴリズムは、ブロック反復アルゴリズム(例えば、ブロック反復SART又はOS−SART)として修正することができる。陽子CT再構成に適用されるSARTアルゴリズムは、最小2乗の最小に収束するように構成することができる。しかし、アルゴリズムは、重み付け値(1/m)が比較的小さいため、依然として遅い可能性がある。ここで、量mは、データ集合内の陽子の数を表す。図21B及び図22では、例示的なGEANT4シミュレーションに適用されるようなOS−ART投影アルゴリズムが、曲線656及び下の行の第1列の画像として示される。
【0120】
幾つかの実施態様では、摂動弾力性投影アルゴリズムは、ブロック反復投影(block-iterative projection)(BIP)アルゴリズムとすることができる。こうしたアルゴリズムは、Aharoni及びCensorによって開発され、このアルゴリズムに関する更なる詳細は、例えば、R.Aharoni及びY.Censor「Block-iterative projection methods for parallel computation of solutions to convex feasibility problems」(Linear Algebra and its Applications, 120, 165-175(1989))に見出すことができる。BIPアルゴリズムの幾つかの実施態様では、同時投影は、超平面の各ブロック内で行うことができ、超平面の複数のこうしたブロックは、順次に反復的に処理することができる。幾つかの実施態様では、BIPアルゴリズムは、ブロックサイズ(複数の場合もあり)に応じて重み付けを提供するように構成することができ、それにより、1/n重み付け値に関連する再構成が遅いという問題が回避される。図21A及び図22では、例示的なGEANT4シミュレーションに適用されるようなBIP投影アルゴリズムが、曲線652及び上の行の第3列の画像として示される。
【0121】
幾つかの実施態様では、摂動弾力性投影アルゴリズムは、ストリング平均化投影(string-averaging projection)(SAP)アルゴリズムとすることができる。こうしたアルゴリズムは、Censor、Elfving及びHermanによって開発され、このアルゴリズムに関する更なる詳細は、例えばY.Censor、T.Elfving及びG.T.Herman「Averaging strings of sequential iterations for convex feasibility problems」(Inherently Parallel Algorithms in Feasibility and Optimization and Their Applications, Elsevier Science Publications, Amsterdam, The Netherlands, D. Butnariu, Y. Censor, and S. Reich (Ed),101-114 (2001))に見出すことができる。SAPアルゴリズムの幾つかの実施態様では、それぞれが超平面のストリングを有する複数のストリングを形成することができる。順次投影は、各ストリング内で実施することができ、こうした順次投影は、複数のストリングについて並列に実施することができる。こうした投影は、ストリングの全ての凸の組合せの反復として処理することができる。図21A及び図22では、例示的なGEANT4シミュレーションに適用されるようなSAP投影アルゴリズムが、曲線654及び上の行の第4列の画像として示される。
【0122】
幾つかの実施態様では、摂動弾力性投影アルゴリズムは、コンポーネント平均化(CAV)アルゴリズムとすることができる。こうしたアルゴリズムは、Censor、Gordon及びGordonによって開発され、このアルゴリズムに関する更なる詳細は、例えばY.Censor、D.Gordon及びR.Gordon「Component averaging: An efficient iterative parallel algorithm for large and sparse unstructured problems」(Parallel Computing, 27, 777-808 (2001))に見出すことができる。幾つかの実施態様では、CAVアルゴリズムは、実質的に完全に同時であるように構成することができ、1/n重み付け係数は、対角要素がj番目のボクセルを交差する陽子の数に等しい対角行列の族によって置換することができる。こうした構成によって、非直交投影を得ることができる。幾つかの実施態様では、CAVアルゴリズムは、ブロック反復CAV(BICAV)アルゴリズムとして動作するように修正することができる。幾つかの実施態様では、CAVアルゴリズムは、コンポーネント平均化行投影(component averaging row projection)(CARP)アルゴリズムとして動作するように修正することができる。図21B及び図22では、例示的なGEANT4シミュレーションに適用されるようなBICAV投影アルゴリズムが、曲線658及び下の行の第2列の画像として示される。図21B及び図22では、例示的なGEANT4シミュレーションに適用されるようなCARP投影アルゴリズムが、曲線662及び下の行の第4列の画像として示される。
【0123】
幾つかの実施態様では、摂動弾力性投影アルゴリズムは、対角緩和した直交緩和(DROP)アルゴリズムとすることができる。こうしたアルゴリズムは、Censor、Herman、Elfving、及びNikazadによって開発され、このアルゴリズムに関する更なる詳細は、例えばY.Censor、T.Elfving、G.T.Herman及びT.Nikazad「On diagonally-relaxed orthogonal projection methods」(SIAM Journal of Scientific Computing, 30, 473-504(2008))に見出すことができる。幾つかの実施態様では、DROPアルゴリズムは、実質的に完全に同時であるように構成することができ、重み付け手法は、CAVアルゴリズムの重み付け手法と同様とすることができる。しかし、結果として得られる投影は直交とすることができる。幾つかの実施態様では、DROPアルゴリズムは、ブロック反復DROP(BIDROP)アルゴリズムとして動作するように修正することができる。図21B及び図22では、例示的なGEANT4シミュレーションに適用されるようなDROP投影アルゴリズムが、曲線660及び下の行の第3列の画像として示される。
【0124】
幾つかの実施態様では、摂動弾力性投影アルゴリズムは、修正重み付けスキームを有する同時代数再構成技法(simultaneous algebraic reconstruction technique)(SART)アルゴリズムとすることができる。こうしたアルゴリズムは、Anderson及びKakによって開発され、このアルゴリズムに関する更なる詳細は、例えばA.H.Andersen及びA.C.Kak「Simultaneous algebraic reconstruction technique(SART): A superior implementation of the ART algorithm」(Ultrasonic Imaging, 6, 81-94 (1984))に見出すことができる。幾つかの実施態様では、こうしたアルゴリズムは、実質的に完全に同時であるように構成することができ、重み付けは、各行列の行の非ゼロ要素の和に対して1の量とすることができる。幾つかの実施態様では、こうしたアルゴリズムは、ブロック集合反復(OSART)アルゴリズムとして動作するように修正することができる。
【0125】
他の投影アルゴリズムも、本明細書で述べる例示的な総変動優秀化(total variation superiorization)方法がある状態で又はない状態で利用することができる。こうした投影アルゴリズムの例に関する更なる詳細は、(i)D.Butnariu、Y.Censor及びS.Reich (Editors)「Inherently Parallel Algorithms in Feasibility and Opimization and Their Applications」(Elsevier Science Publishers, Amsterdam, The Netherlands, 2001)、(ii)Y.Censor及びS.A.Zenios「Parallel Optimization: Theory, Algorithms, and Applications」(Oxford University Press, New York, NY, USA, 1997)、及び(iii)Y.Censor、W.Chen、P.L.Combettes、R.Davidi及びG.T.Herman「On the effectiveness of projection methods for convex feasibility problems with linear inequality constraints」(Technical Report, December 22, 2009(http://arxiv.org/abs/0912.4367のarXivで入手可能))等の文献に見出すことができる。
【0126】
本明細書で述べるように、優秀化手法は、或るメリット関数に関して優れた解を見出すプロセスを含むことができ、こうした優れた解は、摂動弾力性投影から得られる集合を含む、対応する凸実行可能性問題(convex feasibility problem)(CFP)集合の実行可能解でもある。幾つかの実施態様では、こうしたメリット関数は、優秀化を総変動優秀化(TVS)とすることができるような総変動(TV)関数を含むことができる。
【0127】
総変動優秀化技法を実証するために、出願人は、本明細書で述べるように、DROP投影アルゴリズム(BIDROP)のブロック反復バージョンを使用した。こうしたTVS技法はまた、本明細書で開示したアルゴリズムを含む他の投影アルゴリズムとともに実装することができることが理解されるであろう。
【0128】
例示的なBIDROPアルゴリズムは、超平面指数の集合Iを、I=I1∪I2∪...∪IMであるようなM個のブロックの和集合として分割することによって使用することができる。幾つかの実施態様では、M個のブロックは、固定ブロックとすることができる。本明細書で述べるように、BIDROPアルゴリズムは、コンポーネント依存の重み付けスキームを使用するブロック反復投影法の変形であるとみなすことができる。
【0129】
幾つかの実施態様では、BIDROPは、次のように構成することができる。初期化は、オブジェクトベクトルxの第1の要素x0の値を選択することを含むことができる。x0のこうした値は、任意とすることもできるし、例えば、フィルタ補正逆投影(FBP)法を使用して推定することもできる。
【0130】
幾つかの実施態様では、反復ステップは、所与のベクトル要素xkについて、
【0131】
【数12】
【0132】
である、次の反復xk+1の計算を含むことができる。方程式7では、対角行列Ut(k)は、
【0133】
【数13】
【0134】
として表すことができる。ここで、htjは、j番目のボクセルに交差するt番目のブロック内の陽子履歴の数であり、
【0135】
【数14】
【0136】
は、ユーザ選択の緩和パラメータのシーケンスである。本明細書で述べるTVS技法の例示的な実証では、λは、BIDROPに関する結果に基づいて約1.9の値に維持され、データは、図23に示すように、12ブロックに分割された。さらに、ブロックは、t(k)=k mod M+1であるような周期制御である制御シーケンス
【0137】
【数15】
【0138】
によるアルゴリズムによって取上げられる。例示的な陽子データ集合は、実質的に等しいサイズで、かつ、各投影角度から実質的に等しい数の陽子履歴を有する12個のブロックに分割された。
【0139】
幾つかの実施態様では、メリット関数φ及び/又は近接性関数Prは、優秀化再構成を操向するように選択することができる。実行可能性近接性関数は、測定された積分相対阻止能(RSP)値の残りと、現在の画像推定によって得られた値とを提供するように選択することができる。こうした実行可能性近接性チェックは、メリット関数φによって表される更なるタスクに関する優秀化が、測定データと一致しない解を操向しないことを確実にするために利用することができる。幾つかの実施態様では、測定データに対する現在の画像推定xkの実行可能性近接性は、
【0140】
【数16】
【0141】
として計算することができる。ここで、mは、対象となる集合内の陽子履歴の数である。
【0142】
幾つかの状況では、(制約の交差の)実行可能集合は空とすることができる。こうした状況でも、方程式8の近接性関数を低減することは、制約に低い程度に「違反する(violate)」ことがより少ない点をもたらし、したがって、たとえ近接性関数がゼロの値に達しない(また、或る状況では、達することができない可能性がある)場合でも、有用であり得る。
【0143】
幾つかの実施態様では、再構成プロセス中に低減され、かつ、再構成された画像推定の総変動に関連するメリット関数φは、
【0144】
【数17】
【0145】
として表すことができる。ここで、pkは、n次元画像ベクトルxkの2次元J×J表現である。
【0146】
幾つかの実施態様では、画像推定の低減した総変動に向かって画像推定の反復シーケンスを操向するための摂動ベクトルvを計算することができる。例えば、摂動ベクトルは、
【0147】
【数18】
【0148】
になるように、xkにおける総変動の正規化された劣勾配(subgradient)を負数にしたものとして計算することができる。幾つかの実施態様では、総変動の例示的な劣勾配(複数の場合もあり)は、P.L.Combettes及びJ.Luoによって著された文献、「An adaptive level set method for nondifferentiable constrained image recovery」(IEEE Trans. Image Process, 11, 1295-1304 (2002))に述べられている方法で計算することができる。上記の例示的な摂動ベクトルに関する更なる詳細は、例えば、D. Butnariu、R. Davidi、G. T. Herman及びI. G. Kazantsevによって著された文献、「Stable convergence behavior under summable perturbations of a class of projection methods for convex feasibility and optimization problems」(IEEE J. Sel. Top. Signal Process, 1, 540-547, (2007))に見出すことができる。
【0149】
例1
上記の例示的なDROPベースの優秀化技法は、複数の方法で実装することができる。第1の例では、続く反復プロシージャのための初期画像推定は、測定データからフィルタ補正逆投影(FBP)再構成を実施することによって取得することができる。こうしたFBPは、既知の超音波画像グリッドに実質的に整合するように、個々の陽子履歴をリビニングすることによって実行することができる。反復プロシージャの場合、DROP投影作用素は、データ集合の全てのブロックが処理されるまで、周期的に適用することができる。幾つかの実施態様では、データ集合内の実質的に全ての履歴を含む、本明細書で述べるオプションの実行可能性近接性計算をチェックすることができる。
【0150】
幾つかの実施態様では、上記の第1の例示的なDROPベースの総変動優秀化技法は、複数の方法でコード化することができる。例えば、こうしたコード化は、以下のようなアルゴリズムを含むことができる。
(1)k=0にセットする
(2)xk=xFBP初期FBP再構成、及びβk=1にセットする
(3)Nサイクルにわたって以下を繰り返す
(4) xkにおいてsをφの劣勾配にセットする
(5) ‖s‖>0である場合、vk=−s/‖s‖にセットする
(6) ‖s‖>0でない場合、vk=sにセットする
(7) continue=trueにセットする
(8) continueである間、以下を行う
(9) yk=xk+βkvkにセットする
(10) 方程式9によってメリット関数(総変動)を計算し、φ(yk)≦φ(xk)である場合、
(11) yk(方程式7)に投影作用素Pt(k)を順次にM回適用する
(12) M個全てのブロックからの履歴を使用して、方程式8によって実行可能性近接性を計算し、Pr(PMy)<Pr(xk)である場合、
(13) xk+1=PMyにセットする
(14) continue=falseにセットする
(15) Pr(PMy)<Pr(xk)でない場合、βk=βk/2にセットする
(16) φ(yk)≦φ(xk)でない場合、βk=βk/2にセットする
(17)k=k+1にセットする
幾つかの実施態様では、サイクルの数を表す量Nを、例えば10にセットすることができる。Nの他の値も使用することができる。
【0151】
例2
第2の例では、DROP投影作用素を、後続のブロックからの履歴によって実施されるオプションの実行可能性近接性チェックを継続する前に、所与のブロックに適用することができる。こうした手法は、各ブロックが、各投影角度から実質的に等しい数の履歴を含み、したがって、全体としてデータを表し得るときに利用することができる。第1の例と同様に、初期画像推定は、測定データからフィルタ補正逆投影(FBP)再構成を実施することによって取得することができる。
【0152】
幾つかの実施態様では、上記の第2の例示的なDROPベースの総変動優秀化技法は、複数の方法でコード化することができる。例えば、こうしたコード化は、以下のようなアルゴリズムを含むことができる。
(1)k=0にセットする
(2)xk=xFBP初期FBP再構成、及びβk=1にセットする
(3)Nサイクルにわたって以下を各ブロックについて繰り返す
(4) xkにおいてsをφの劣勾配にセットする
(5) ‖s‖>0である場合、vk=−s/‖s‖にセットする
(6) ‖s‖>0でない場合、vk=sにセットする
(7) continue=trueにセットする
(8) continueである間、以下を行う
(9) yk=xk+βkvkにセットする
(10) 方程式9によってメリット関数(総変動)を計算し、φ(yk)≦φ(xk)である場合、
(11) y(方程式7)に投影作用素Pt(k)を適用する
(12) 後続のブロックからの履歴を使用して、方程式8によって実行可能性近接性を計算し、Pr(Pt(k)y)<Pr(xk)である場合、
(13) xk+1=Pt(k)yにセットする
(14) continue=falseにセットする
(15) Pr(Pt(k)y)<Pr(xk)でない場合、βk=βk/2にセットする
(16) φ(yk)≦φ(xk)でない場合、βk=βk/2にセットする
(17)k=k+1にセットする
幾つかの実施態様では、サイクルの数を表す量Nを、例えば10にセットすることができる。Nの他の値も使用することができる。
【0153】
例3
第3の例では、第1の例の方法は、ステップ12の実行可能性近接性チェックが実施されないように修正することができる。こうした修正は、所与の実行可能性近接性チェックが計算的に煩雑である場合に望ましい場合がある。
【0154】
例4
第4の例では、第2の例の方法は、ステップ12の実行可能性近接性チェックが実施されないように修正することができる。こうした修正は、所与の実行可能性近接性チェックが計算的に煩雑である場合に望ましい場合がある。
【0155】
例5
第5の例では、限定はしないが、方程式9を含む総変動(TV)関数を利用することができる。幾つかの実施態様では、DROP投影技法に基づくことができる第5の例は、複数の方法でコード化することができる。例えば、こうしたコード化は、x0=選択された値、かつ、β0=1である場合に、初期化を行うことができることを含むことができる。xk及びβkが与えられる反復ステップの場合、xk+1及びβk+1は、以下のように生成することができる。
(1)ブロック指数tを通してループする
(2)摂動ベクトルvkを計算する
(3)zk=xk+βkvkにセットする
(4)TV(zk)>TV(xk)である場合、βk=βk/2にセットして(2)へ進み、TV(zk)>TV(xk)でない場合、(5)へ進む
(5)方程式7と同様のDROPアルゴリズムによって、現在のブロック内で、超平面上へのzkの投影を計算する
(6)Res(yk)>Res(xk)である場合、βk=βk/2にセットして(2)へ進み、Res(yk)>Res(xk)でない場合、(7)へ進む
(7)xk+1=ykにセットし、停止条件が適用されるまで、(1)〜(6)を繰返す
幾つかの撮像状況では、計算処理リソース(例えば、計算パワー及び計算時間)を犠牲にしてオブジェクトの高品質画像を得ることが可能である。意図する用途にとって十分な品質を有し、リソースの許容可能な量を使用する画像を取得することが一般に望ましい。本開示の1つ又は複数の特徴が、陽子CTアプリケーションに適用されると、こうした望ましい品質及び/又は性能の利点を提供することができると考えられている。
【0156】
図24は、幾つかの実施態様において、プロセス700を、所望の品質及び/又は再構成性能特徴を有する陽子CT画像の形成を可能にする解を見出すために実施することができることを示す。ブロック702において、オブジェクトを通過した複数の陽子が検出することができる。こうした陽子検出の例(例えば、追跡及びエネルギー損失測定)が本明細書で述べられる。ブロック704において、オブジェクトを通って各陽子がとる経路を、オブジェクト内での陽子の相互作用を特徴付けるために推定することができる。こうした経路推定の例が本明細書で述べられる。ブロック706において、陽子の相互作用履歴を、実行可能解の凸集合に変換することができる。こうした変換の例が本明細書で述べられる。ブロック708において、凸集合内にある解を、変換に関連するメリット関数に基づいて見出すことができ、その解は、少なくとも1つの選択された推定又は既存の解より優れている。こうした優秀化方法の例が本明細書で述べられる。
【0157】
図25は、幾つかの実施態様において、例えば図24のプロセス700によって得られた優れた解に基づいて画像を得るためにプロセス710を実施することができることを示す。ブロック712において、凸実行可能性集合からの優れた解を得ることができ、ここで、凸実行可能性集合は、複数の陽子のそれぞれと、撮像されるオブジェクトとの相互作用を特徴付ける。ブロック714において、オブジェクトは、ブロック712で得られた優れた解に基づいて特徴付けすることができる。例えば、所望のボクセル値を有するベクトルは、優れた解から計算することができる。ブロック716において、オブジェクトの画像は、オブジェクトの特徴付けに基づいて形成することができる。
【0158】
図26A及び図26Bは、GEANT4によってシミュレートされた例示的な陽子相互作用構成800を示し、図27〜図29は、本明細書で述べる再構成方法から得られる例示的な結果を示す。
【0159】
例示的なシミュレーション構成800では、検出器システムは、上流追跡検出器804及び下流追跡検出器806を含む。上流検出器804及び下流検出器806のそれぞれは、個々の陽子の入射及び出射の場所及び方向の確定を可能にするために2つの追跡平面を含む。各追跡平面は、約30cm×30cmの寸法と、約0.04cmの厚さと、約100μmの割り当てられた空間分解能とを有する2D感応性シリコン追跡平面として構成される。
【0160】
シミュレーション構成800の検出器システムは、約32cm×32cmの横方向寸法と約10cmの厚さとを有するCsI結晶熱量計808を更に含む。熱量計808の応答をシミュレートするために、検出器の雑音源が無視され、検出器は、完全なエネルギー分解能を有するものとして構成された。
【0161】
例示的なシミュレーション構成800では、2つの異なる仮想ファントム810が、空間分解能及び相対阻止能分解能を定量化するために使用された。その断面図が図26Bに示される両方のファントムは、約16cmの直径を有する。各ファントムは、国際放射線防護委員会(ICRP)によって規定されたような、化学組成及び電子密度が脳812及び頭骸骨814に実質的に同等な2つの物質を含む。
【0162】
図26Bでは、第1の例示的なファントム810aは、選択された再構成ボクセル寸法にほぼ等しい、約(0.82×0.82)mm2の断面を有する、中心長方形プリズム構造816を含む。こうしたファントムは、所与の再構成方法の空間分解能の推定を可能にすることができる。第2の例示的なファントム810bは、こうした中心構造を含まない。例示的なシミュレーションのために、中心構造816の電子密度は、周囲の脳物質の電子密度より約20倍大きいが、同じ化学組成を保持するように選択された。
【0163】
図26Aに示すように、約200MeVのエネルギーを有する実質的に単一エネルギーの陽子は、2D平行ビーム幾何形状を形成した。約2度間隔を有する180回の投影が、各ファントムについてシミュレートされた。各投影角度について、追跡平面上の位置及び熱量計に付与されたエネルギーが、20000個の陽子について記録された。
【0164】
陽子とファントムとの相互作用をシミュレートするために、GEANT4ハドロンイオン化モデルが使用された。モデルは、ファントムを横切る陽子について対象となるエネルギー範囲をカバーする、約2MeVを超える陽子エネルギーについてベーテブロッホ(Bethe-Block)関係を使用した。イオン化エネルギー損失について、GEANT4構成は、1keV〜100TeVの運動エネルギーにおいて対数的に等間隔で配置された100ステップにおける平均値の計算を含む。しかし、こうしたデフォルト構成は、陽子CTアプリケーションにとって十分に正確でない場合があることを調査が示した。したがって、エネルギービニングが、2000ステップにおいて1keV〜500MeVまで計算された。GEANT4における低エネルギー弾性核衝突モデル及び低エネルギー非弾性核衝突モデルが使用可能にされた。
【0165】
シミュレートされた陽子データ(入口座標及び出口座標並びに熱量計に付与されたエネルギーを含む)に基づいて、各ファントムの2D画像が、種々のDROPベースの投影アルゴリズムによって、また、優秀化方法がある状態及びない状態で再構成された。所与のブロック内の投影等の計算(例えば、他のブロックと独立であり得る方程式7の加算)の並列実行を実施するために、GPGPU(汎用グラフィカル処理ユニット)が使用された。所与のGPGPU上でのブロック投影の完了に続いて、更なる処理のために、加算されたアレイが、プロセッサ(例えば、CPU)に戻された。CPUはまた、ブロック反復アルゴリズムの順次部分を実施した。
【0166】
上記の方法で得られた画像は、以下のように更に解析された。再構成画像の空間分解能は、空間周波数の関数として撮像システムの信号伝達特性の尺度を提供することができる2D変調伝達関数(MTF)によって定量化された。こうした尺度について、中心にある密な長方形プリズム(図26Bの816)の画像の点拡がり関数(point spread function)(PSF)が使用された。再構成に続いて、PSFを中心とする16×16の2Dボクセルの関心領域の2D高速フーリエ変換(FTT)が実行された。ファントムの軸対称性を利用して、MTFは、画像の、結果として得られる空間周波数表現のx軸成分及びy軸成分の大きさを平均することによって、関心領域において得られた。
【0167】
低コントラスト密度分解能は、所与のサイズのオブジェクトを周囲組織から識別するのに必要とされる最小コントラストを確定するためのオブジェクト統計解析法を提供することができるコントラスト識別関数(CDF)によって評価された。CDFは、一様なファントム(図26Bの810b)の再構成画像を、サイズが1×1〜10×10の2Dボクセルの範囲のオブジェクトのグリッドに分割することによって計算された。グリッド要素内の平均ピクセル値の分布の標準偏差は、所与の信頼レベルで検出可能な最小コントラストを確定するために使用された。95%の信頼レベルの場合、選択されたグリッドサイズのオブジェクトと背景との間の検出可能な密度差は、平均ピクセル値分布の3.29標準偏差として規定された。
【0168】
再構成された相対阻止能(RSP)値の量的精度は、ヒストグラム解析を使用し、相対的RSP誤差を
【0169】
【数19】
【0170】
として規定して、確定された。ここで、x’jは、ファントムのボクセルj内のRSPであり、xnjは、nサイクル後のボクセルj内の再構成されたRSPである。
【0171】
図27は、(a)総変動優秀化なしのDROPと、(b)TVSを用いるが、(第3の例としても述べられる)第1の例における実行可能性近接性チェックがない状態のDROP(TVS1−DROP*)と、(c)TVSを用いるが、(第4の例としても述べられる)第2の例における実行可能性近接性チェックがない状態のDROP(TVS2−DROP*)とによって再構成された画像を示す。上の行の画像は、一様なファントム(図26Bの810b)の再構成であり、下の行の画像は、空間分解能ファントム(図26Aの810a)の再構成である。例示的な画像は、0.8と1.2との間にRSP値を含むように切断したRSP窓から得られる。
【0172】
図28A〜図28Cに示す種々の例示的な結果において、実行可能性近接性チェックを用いるDROPベースのTVS法は、「*」シンボルなしで示される。
【0173】
上記の方法を用い、かつ、実行可能性近接性チェックなしで再構成された画像は、実行可能性近接性チェックを用いて再構成された画像と比較すると、より小さいか又はほぼ同等な最小相対誤差を有していた。こうした作用が図28Aに示される。DROPベースのTVS法は全て、実行可能性近接性チェックを用いても用いなくても、少なくとも10まで延びる反復サイクル数範囲について、TVSなしのDROP(DROP-without-TVS)法より小さな相対誤差を有する。図27に示す画像は、TVSなしのDROPの場合、サイクル3であり、TVS1−DROP*及びTVS2−DROP*の場合、サイクル10である、最小相対誤差の各サイクルにおいて得られた画像に対応することが留意されるべきである。定性的には、TVS2−DROP*スキームが、おそらく余分の摂動ステップのために、最も低い雑音レベルを有したことがわかる。
【0174】
図28Aは、種々のスキームについてのサイクル数の関数としての相対誤差のプロットを示す。プロットにおいて、サイクル0の相対誤差は、反復TV優秀化の初期点を生成するのに使用されたFBPアルゴリズムによって生成される相対誤差に対応する。
【0175】
TVS1−DROP及びTVS1−DROP*スキーム(実行可能性近接性チェックを用いた状態及び用いない状態)によって再構成された画像は、一般に、定量的な相対阻止能(RSP)精度の点で同等であり、相対誤差は、サイクル数が増加するにつれて、単調減少傾向に従う。実行可能性近接性チェックの排除は、この場合チェック条件が違反されないため、大きな差を生じない。
【0176】
一方、実行可能性近接性チェックの排除は、TVS2−DROPスキームの場合、大きな差を生じる。図28Aは、実行可能性近接性チェックを含むことが、DROPアルゴリズムと同様の、最小に達した後の相対誤差の漸進的な増加をもたらし得ることを実証する。こうした作用は、減少したβが、摂動ステップの雑音低減効果を弱め得ることによって説明することができる。したがって、DROPアルゴリズムが低い相対誤差から離れるため、より厳格なTVS手法も低い相対誤差から離れる。これは、TVS2−DROPに関しては起こるが、TVS1−DROPに関しては起こらない。その理由は、実行可能性近接性条件の違反が、前者に関しては観測されるが、後者に関しては観測されないからである。実行可能性近接性チェックがない状態では、TVS2−DROP*スキームの相対誤差は、10サイクル内で単調減少傾向に従う。最初の10サイクル内での最小相対誤差は、DROPに関して約2.64%、TVS1−DROP及びTVS1−DROP*に関して約1.96%、TVS2−DROPに関して約1.64%、及びTVS2−DROP*に関して約1.55%である。これらの差は、異なるスキームによって再構成された画像内の様々な程度の雑音から生じ得る。
【0177】
上記の例示的な結果は、12ブロックに細分されたデータによって得られた。結果の別の集合は、180ブロックに細分されたデータによって得られ、その結果(図示せず)は、12ブロックの結果に非常に似ていた。したがって、幾つかの実施態様では、総変動優秀化方法によって処理されたブロック反復再構成アルゴリズムは、ブロックの数の或る変化により、実質的に影響されないことができる。
【0178】
図27の上の行に提示されている画像のヒストグラムは、脳及び骨等価領域の平均再構成値を解析するために生成された。再構成雑音をモデル化するために、ガウス分布がピークに当てはめられた。全てのスキームは、ピーク当てはめ不確実性内で、脳及び骨等価領域について実質的に同じ平均RSP値を再構成した。したがって、TVS摂動スキームは、これらの物質の再構成値の精度に悪い影響を及ぼさなかった。
【0179】
TVS1−DROP*及びTVS2−DROP*スキーム(ともに、雑音性能を改善し、再構成時間を低減した)を使用した更なる解析によって、図28Bに示すMTFプロットを得た。プロット内の任意の空間周波数について、TVS1−DROP*スキームはより大きなMTF値、したがって、DROPスキームの空間分解能に比べて、優れた空間分解能を有する。TVS1−DROP*及びTVS2−DROP*スキームは、空間分解能の点で同様に機能するが、TVS1−DROP*スキームが僅かに良好である。TVS再構成スキームに関する空間分解能の改善は、最低の相対誤差に達する前に実施されるサイクル数がより多いことに起因し得る。反復アルゴリズムとともにMLP形式を使用すると、pCT空間分解能がサイクル数とともに改善することが過去に観測されている。これは、密度分解能を改善する一部の再構成法(図28Cを参照して本明細書で述べる)が、劣った空間分解能を表示することが多いため、重要な結果であり得る。
【0180】
DROP及び低減型(reduced)TVS−DROP*スキームに関連するCDFは、図28Cにプロットされる。TVS1−DROP*スキームは、DROPスキームよりほんの僅かだけ良好に機能するが、TVS2−DROP*スキームは、他の2つのスキームよりはるかに良好に機能する。約1mm2程度の小さいオブジェクトの場合、TVS2−DROP*スキームは、約1%と約1.5%との間のコントラスト識別を可能にする。TVS2−DROP*スキームの優れたコントラスト識別は、画像雑音の低減と空間分解能の改善の組合せに起因し得る。
【0181】
図29は、幾つかの実施態様において、総変動優秀化方法等の優秀化スキームが、相対阻止能(RSP)の測定の改善ももたらすことができることを示す。図29の例示的なプロットは、ファントムに関連する、既知の急峻な阻止能ピーク(実線)並びにDROP法(「x」マーク)及びTVS−DROP法(固体充填マーク)(例えば、本明細書で述べる第5の例)を使用した、シミュレートされたデータの再構成から得られた阻止能ピークを示す。DROPの例についてのRSP分布は、図19Bを参照して述べた例(例えば、有効平均コード長技法)の最良のものと同様の性能を有する。こうしたDROP再構成法にTVS技法を実装することによって、結果として得られるRSPの分布は、実際のRSP分布をかなり良く複製することが示される。
【0182】
図30は、実験陽子データに適用されたTVS−DROP再構成スキームを使用して得られた例示的な陽子CT画像を示す。画像は、空気(左上)、アクリル(右上、約1.2の相対阻止能)及び骨等価プラスチック(右下、約1.7の相対阻止能)の挿入物を有するポリスチレン(約1.035の相対阻止能)で作られた球ファントムの2mmスライス再構成に対応する。異なる阻止能の物質をはっきりと識別することができることがわかる。
【0183】
本明細書で述べるように、優秀化スキームは、手近の撮像タスクに適合するようにpCT再構成に適用することができる。幾つかの実施態様では、pCT又は他の反復画像再構成方法に適用される優秀化方法は、実行可能性探求投影方法の反復ステップの間で、計算された画像推定に摂動を与えることによって容易にすることができる。摂動方法を適切に選択することによって、再構成画像のシーケンスに対する、著しく有利な変更を達成することができる。
【0184】
本明細書で述べるように、総変動の低減に基づく、TVS1−DROP及びTVS2−DROP等の例示的な優秀化スキームは、DROP法に比べて改善された画像品質をもたらすことができる。より具体的には、TVS2−DROPにおいて利用される更なる摂動ステップは、画像雑音のより大きな低減及び優れた密度分解能をもたらすことができる。
【0185】
幾つかの実施態様では、総変動優秀化方法の1つ又は複数の特徴に関連する計算時間は、提供される利益の観点で考慮することができる。例えば、TVメリット関数(例えば、方程式9)及び摂動ベクトルvkの計算は、画像の寸法が比較的大きいとき、画像再構成時間を増加させ得る。別の例では、再構成時間は、実行可能性近接性関数(例えば、方程式8)の計算によって著しく増加し得る。したがって、幾つかの実施態様では、TVSスキームは、実行可能性近接性関数の省略によって減少した時間(例えば、約半分の時間)で実施することができる。TVS2−DROPスキーム等の幾つかの実施態様では、画像雑音の低減を更にもたらす省略を行うことができる。TVS1−DROPスキーム等の幾つかの実施態様では、省略は、他の性能パラメータに対して実質的に全く有害な影響を及ぼさない可能性がある。
【0186】
幾つかの実施態様において、空間分解能の改善は、両方のTVS促進性再構成スキームによって達成することができることも留意される。本明細書で述べる例示的なTVS1−DROP*スキームは、TVS2−DROP*スキームに比べて僅かに優れた空間分解能を示す一方、TVS2−DROP*スキームは、そのより良好な雑音低減にもかかわらず、DROP再構成によって再構成された画像に比べて優れた空間分解能を依然としてもたらす。再構成画像を「平滑化する(smoothing)」ことによって密度分解能を改善しようとする以前の試みは、概して、空間分解能の低下をもたらしたことが注目されてきた。これは、例示的なTVS1−DROP及びTVS2−DROPのスキームでは当てはまらず、ここでは、空間分解能は維持又は改善された。
【0187】
本明細書で述べるように、本開示の1つ又は複数の特徴は、画像等の有用な結果を得るために、陽子CTデータの効果的かつ比較的高速な再構成を容易にすることができる。こうした有利な特徴は、こうした有用な結果を得るために必要とされる放射線線量を低減するためにも利用することができる。例えば、また、図5及び図6を参照すると、CTに利用される陽子は、平均して、ブラッグピークが、撮像されるオブジェクトの下流の場所で起こるように構成することができる。したがって、オブジェクトは、陽子の放射線線量のかなりの部分を受けることを免れる。
【0188】
オブジェクトが受けることを予想され得る(ブラッグピークエネルギー損失がない)線量は、以下のように概略で推定することができる。撮像されるオブジェクトがボクセルに分割され、各ボクセルが1mm3立方体であり、スライス画像を得るために陽子投影が(図26の例示的なシミュレーションと同様の)180の向きで得られると仮定する。概略推定のために、オブジェクトが、250MeVの陽子についてのエネルギー損失が約100MeVであるような水によって表すことができる通常の頭部サイズのオブジェクトであるとも仮定する。このとき、こうしたスライスについて陽子当たりの線量は、約0.5nGyであると推定することができる。
【0189】
上記のスライスを表すベクトルの寸法は、1mm3立方体の例示的なボクセルサイズを仮定して、1802=3.6×104として推定することができる。各ボクセルは、少なくとも1つの陽子によって横切られると仮定する。このとき、こうしたスライスをカバーするのに必要とされることが予想され得る陽子の数は、ベクトル寸法の大きさ程度のものであると推定することができる。したがって、所与のスライスが受けることが予想され得る線量は、(3.6×104)陽子×0.5nGy/陽子=1.8×104nGy又は約20μGy(又は、250MeV範囲内の陽子は一般に低LET放射線であるため、約20μSv)として推定することができる。こうした放射線量は、比較的低く、状況によっては、極度に低いとさえ考えられ得る。
【0190】
本開示の1つ又は複数の特徴に関する更なる詳細は、S.N.Penfold、R.W.Schulte、Y.Censor、A.B.Rosenfeldによる文献「Total variation superiorization schemes in proton computed tomography image reconstruction」(Med. Phys. 37(11), November 2010)に見出すことができる。この文献は、参照によりその全体が本明細書に援用される。
【0191】
本明細書で述べる種々の例示的なプロセス及びアルゴリズムは、電子ハードウェア、コンピュータソフトウェア、又は両方の組合せとして実装することができる。種々のプロセス及びアルゴリズムを実装するために使用されるハードウェア及びデータ処理装置は、汎用のシングルチッププロセッサ若しくはマルチチッププロセッサ、デジタル信号プロセッサ(DSP)、汎用グラフィック処理ユニット(GPGPU)、特定用途向け集積回路(ASIC)、フィールドプログラマブルゲートアレイ(FPGA)若しくは他のプログラマブルロジックデバイス、ディスクリートゲート若しくはトランジスタロジック、ディスクリートハードウェアコンポーネント、又は、本明細書で述べた機能を実施するように設計されたそれらの任意の組合せによって実装又は実施することができる。プロセッサは、マイクロプロセッサ、又は任意の従来のプロセッサ、コントローラ、マイクロコントローラ、又はステート・マシンとすることができる。プロセッサはまた、コンピューティングデバイスの組合せ、例えば、DSPとマイクロプロセッサとの組合せ、複数のマイクロプロセッサ、DSPコアと連携する1つ若しくは複数のマイクロプロセッサ、又は、任意の他のこうした構成として実装することができる。幾つかの実施態様では、特定のステップ及び方法は、所与の機能に固有である回路要素によって実施することができる。
【0192】
本明細書で述べる種々の機能は、ハードウェア、デジタル電子回路要素、コンピュータソフトウェア、ファームウェアにおいて、又はそれらの任意の組合せにおいて実装することができる。本明細書で述べる再構成スキームの実施態様は、1つ又は複数のコンピュータプログラム(例えば、データ処理装置が実行するため、又は、データ処理装置の動作を制御するために、コンピュータ記憶媒体上に符号化されるコンピュータプログラム命令の1つ又は複数のモジュール)として実装することができる。
【0193】
ソフトウェアにおいて実装される場合、機能は、コンピュータ可読媒体上の1つ又は複数の命令又はコードとして記憶又は伝送することができる。本明細書で開示される方法又はアルゴリズムのステップは、コンピュータ可読媒体上に存在することができるプロセッサ実行可能ソフトウェアモジュールに実装することができる。コンピュータ可読媒体は、コンピュータプログラムを1つの場所から別の場所へ転送できるようにすることができる任意の媒体を含む、コンピュータ記憶媒体及び通信媒体の両方を含むことができる。記憶媒体は、コンピュータがアクセスすることができる任意の入手可能な媒体とすることができる。制限としてではなく例として、こうしたコンピュータ可読媒体は、RAM、ROM、EEPROM、CD−ROM若しくは他の光学ディスク記憶装置、磁気ディスク記憶装置若しくは他の磁気記憶デバイス、又は、命令若しくはデータ構造の形態で所望のプログラムコードを記憶するために使用されることができ、コンピュータによってアクセスすることができる任意の他の媒体を含むことができる。同様に、任意の接続を、コンピュータ可読媒体と適切に呼ぶことができる。本明細書で使用されるディスク(disk)及びディスク(disc)は、コンパクトディスク(compact disc)(CD)、レーザディスク(laser disc)、光ディスク(optical disc)、デジタル多用途ディスク(digital versatile disc)(DVD)、フロッピーディスク(floppy disk)、及びブルーレイディスク(blu-ray disc)を含み、ディスク(disk)は通常、データを磁気的に再生する一方、ディスク(disc)は、データをレーザによって光学的に再生する。上記の組合せも、コンピュータ可読媒体の範囲内に含まれるべきである。さらに、方法又はアルゴリズムの動作は、コンピュータプログラム製品に組込むことができる、機械可読媒体及びコンピュータ可読媒体上のコード及び命令の1つ又は任意の組合せ又は集合として存在することができる。
【0194】
本明細書で使用される用語「約(approximately)」、「約(about)」、及び「実質的に(substantially)」は、依然として所望の機能を実施するか又は所望の結果を達成する、述べた量に近い量を表す。例えば、用語「約(approximately)」、「約(about)」、及び「実質的に(substantially)」は、述べた量の10%未満内、5%未満内、1%未満内、0.1%未満内、及び0.01%未満内である量を指すことができる。本明細書で使用される用語「の少なくとも一部分(at least a portion of)」は、全体の或る量を表し、この或る量は、全体を含むことができる全量を含む。例えば、用語「の一部分(a portion of)」は、全体の0.01%より多い、0.1%より多い、1%より多い、10%より多い、20%より多い、30%より多い、40%より多い、50%より多い、60%より多い、70%より多い、80%より多い、90%より多い、95%より多い、99%より多い、及び100%の量を指すことができる。
【0195】
文脈上別途明確に必要としない限り、明細書及び特許請求の範囲全体を通じて、語「備える、含む(comprise)」、「備える、含む(comprising)」、及び同様なものは、排他的意味又は網羅的意味と対照的に、包含的意味で、すなわち、「含むが、それに限定されない(including, but not limited to)」という意味で解釈されるものとする。本明細書で一般に使用される語「結合した(coupled)」は、直接接続されるか又は1つ若しくは複数の中間要素によって接続することができる2つ以上の要素を指す。さらに、語「本明細書で(herein)」、「上記(above)」、「以下(below)」、及び同様の意味の語は、本出願で使用されるとき、本出願を全体として指し、本出願のいかなる特定の部分も指さないものとする。文脈が許可する場合、単数又は複数を使用する上記詳細な説明内の語はまた、複数又は単数をそれぞれ含むことができる。語「又は、若しくは(or)」は、2つ以上のアイテムのリストを参照し(is in reference to)、その語は、語の以下の解釈、すなわち、リスト内のアイテムの任意のものと、リスト内のアイテムの全てと、リスト内のアイテムの任意の組合せとの全てを包含する。
【0196】
本発明の実施形態の上記で詳述された説明は、網羅的であることも、上記で開示された厳密な形態に本発明を限定することも意図しない。本発明の特定の実施形態及び例が例証のために上述されるが、当業者が認識するように、本発明の範囲内で種々の等価な修正が可能である。例えば、プロセス又はブロックは所与の順序で提示されるが、代替の実施形態は、異なる順序で、ステップを有するルーチンを実施することも、ブロックを有するシステムを使用することもでき、幾つかのプロセス又はブロックは、削除し、移動し、追加し、細分し、組み合わせ、かつ/又は修正することができる。これらのプロセス又はブロックのそれぞれは、種々の異なる方法で実装することができる。同様に、プロセス又はブロックは、時として直列に実施されるものとして示されるが、これらのプロセス又はブロックは、代わりに、並列に実施することも、異なる時点で実施することもできる。
【0197】
本明細書で提供される本発明の教示は、必ずしも上述したシステムではなく、他のシステムに適用することができる。上述した種々の実施形態の要素及び動作は、更なる実施形態を提供するために組み合わせることができる。
【0198】
本発明の或る特定の実施形態が述べられたが、これらの実施形態は、単に例として提示されており、本開示の範囲を制限することを意図されない。実際には、本明細書で述べる新規な方法及びシステムは、種々の他の形態で具現化することができ、さらに、本明細書で述べる方法及びシステムの形態における種々の省略、置換及び変更を、本開示の趣旨から逸脱することなく行うことができる。添付特許請求の範囲及びその均等物は、本開示の範囲及び趣旨内に入る形態又は修正形態を包含することを意図される。
【技術分野】
【0001】
本開示は、包括的には、医療撮像の分野に関し、より詳細には、陽子コンピュータ断層撮影のためのシステム及び方法に関する。
【0002】
[優先権の主張]
本出願は、2010年2月12日に出願された「PROTON COMPUTED TOMOGRAPHY」という名称の米国仮特許出願第61/303,783号の米国特許法第119条(e)による優先権の利益を主張し、この出願は、参照によりその全体が本明細書に援用され、本明細書の一部とみなされる。
【0003】
[連邦政府による資金提供を受けた研究開発の記載]
本発明は、国立心肺血液研究所によって与えられたNIH認可番号第R01HL070472号による政府の支援によって、一部資金提供を受けたものである。政府は、本発明において一定の権利を有する。
【背景技術】
【0004】
コンピュータ断層撮影(CT)は、3次元オブジェクトの特定の物理的特性の再構成を可能にし、この再構成を、オブジェクトの2次元断面、すなわち「断層」画像のアレイとして配列し表示する。こうした再構成は、オブジェクトに貫入する、適切に構成されたX線又は粒子放射線によって容易にすることができる。こうした放射線の検出及びこうしたデータの処理は、こうした2次元画像の再構成を容易にすることができる。
【0005】
陽子ビームは、オブジェクトを貫通するように構成することができる。こうしたオブジェクトを通過する陽子からの2次元画像の再構成は、関わる陽子の数が比較的多く、オブジェクト内で陽子が受ける相互作用のタイプが様々であるため困難である場合がある。
【発明の概要】
【0006】
幾つかの実施態様において、本開示は、コンピュータ断層撮影を実施するための方法に関する。本方法は、オブジェクトを通過する複数の陽子について測定データを取得することを含む。測定データは、陽子のそれぞれについて第1のトラック及び第2のトラックに関する情報を含む。第1のトラック及び第2のトラックは、それぞれ、陽子の、オブジェクトの通過の前及び後の陽子の軌跡に対応する。測定データは、陽子の、オブジェクトの通過によって生じる各陽子の相互作用量に関する情報を更に含む。本方法は、第1のトラック及び第2のトラックに少なくとも部分的に基づいてオブジェクト内で陽子がとる経路を推定することを更に含む。本方法は、陽子の、オブジェクトの通過が、連立方程式Ax=bとして表されるか又は表すことが可能であるように、陽子の相互作用量及び推定経路を配列すること更に含み、ここで、xは、オブジェクトに関連するパラメータの分布であり、bは、オブジェクト内の陽子のそれぞれの経路に沿う相互作用から生じる陽子の相互作用量を表し、Aは、bを得るためにxに作用する作用素である。作用素Aは、オブジェクト内の陽子の推定経路に関する情報を有する。連立方程式は、複数の解を有するように構成することができる。本方法は、連立方程式について初期解を推定することを更に含む。本方法は、複数の解の中で1つ又は複数の実行可能解を探すことであって、各実行可能解は、既存の解に摂動を与えることによって得られ、既存の解の摂動なしで得られる別の解よりも、オブジェクトパラメータ分布の再構成に関連する量について優れた特性を有する、探すことを更に含む。本方法は、1つ又は複数の実行可能解のうちの選択された1つの解に基づいてオブジェクトパラメータ分布を計算することを更に含む。
【0007】
幾つかの実施態様において、陽子の相互作用量は、陽子の、オブジェクトの通過によって生じる陽子のエネルギー損失を含むことができる。幾つかの実施態様において、bは、陽子の推定経路に沿う相互作用量の積分値を表すことができる。幾つかの実施態様において、連立方程式Ax=bは、連立一次方程式とすることができる。こうした連立方程式において、作用素Aは行列とすることができる。
【0008】
幾つかの実施態様において、選択された実行可能解は、複数の解の中で最適解でない実行可能解を含むことができる。幾つかの実施態様において、オブジェクトパラメータ分布を計算することは、3Dオブジェクトパラメータ分布を計算することを含むことができる。幾つかの実施態様において、本方法は、計算されたオブジェクトパラメータ分布に基づいてオブジェクトの断層画像のアレイを形成することを更に含むことができる。
【0009】
幾つかの実施態様において、オブジェクトパラメータ分布は、電子密度ベース量の分布を含むことができる。電子密度ベース量は、水等の実質的に一様な物質に対する相対的陽子阻止能を含むことができる。幾つかの実施態様において、再構成されるオブジェクトパラメータ分布は、電子密度ベース量の3次元分布を含むことができる。
【0010】
幾つかの実施態様において、経路を推定することは、陽子の最尤経路を推定することを含むことができる。幾つかの実施態様において、オブジェクトパラメータ分布の再構成に関連する量は、再構成されたオブジェクトパラメータ分布の総変動を含むことができる。総変動の優れた特性は、総変動の、より低い値を含むことができる。
【0011】
幾つかの実施態様において、初期解を推定することは、フィルタリングされた逆投影再構成解を計算することを含むことができる。
【0012】
幾つかの実施態様において、1つ又は複数の実行可能解を探すことは、オブジェクトパラメータ分布xのベクトル表現xkに摂動を与えることであって、摂動付与済みベクトルykを得る、摂動を与えることと、摂動付与済みベクトルykに関連する再構成されたオブジェクトパラメータ分布に関連する量を評価することと、摂動付与済みベクトルykに関連する量が、未摂動ベクトルxkに関連する量より優れている場合、ykを投影することであって、それによって次のベクトル表現xk+1を得る、ykを投影することと
の反復を実施することを含む。
【0013】
幾つかの実施態様において、ベクトルxkに摂動を与えることは、yk=xk+βkvkとなるようにykを計算することを含むことができ、ここで、βkは、摂動の大きさを表し、vkは、摂動ベクトルである。幾つかの実施態様において、ykについて評価された量が、xkについて評価された量以下である場合、摂動付与済みベクトルykに関連する量は、未摂動ベクトルxkに関連する量に対して優れている。幾つかの実施態様において、投影することは、或る関連する凸集合上へのxkの数学的に規定された投影としてxk+1を計算することを含むことができる。投影することは、測定データが複数のブロックに分割されるように、ブロック反復投影アルゴリズムを使用して、超平面、半空間、超スラブ、又は他の凸集合上に投影することを含むことができる。幾つかの実施態様において、投影することは、連立方程式の個々の超平面上への直交投影とともに、対角成分ごとの緩和を可能にするように構成された対角緩和した直交投影(DROP)ベースアルゴリズムを使用して投影することを含むことができる。幾つかの実施態様において、DROPベースアルゴリズムは、対角緩和した直交行列λkUt(k)を含むことができ、ここで、λkは、k番目の反復についての緩和パラメータであり、Ut(k)は、t番目のブロックについて対角要素min(1,1/htj)を有する対角行列であり、htjは、ベクトルxkのj番目のボクセルと交差するt番目のブロック内の陽子履歴の数である。
【0014】
幾つかの実施態様において、投影することは、次の反復に進む前に、ブロックが全て処理されるまで、ブロックを通して周期的に実施することができる。幾つかの実施態様において、反復は、処置される所与のブロックについて、投影することが該所与のブロックについてだけ実施されるように、各ブロックについて実施することができる。
【0015】
幾つかの実施態様において、本開示は、陽子コンピュータ断層撮影を実施する方法に関する。本方法は、オブジェクトを通過する複数の陽子について測定データを取得することを含む。本方法は、測定データに対する総変動優秀化に基づいて投影ベース再構成アルゴリズムを反復して適用することであって、オブジェクトの相対阻止能の分布を得る、適用することを更に含む。幾つかの実施態様において、本方法は、相対阻止能分布に基づいてオブジェクトの視覚画像を形成することを更に含むことができる。
【0016】
幾つかの実施態様において、本開示は、陽子コンピュータ断層撮影システムに関する。本システムは、オブジェクトを通過するのに十分な、選択された平均エネルギーを有する複数の陽子を送出するように構成された陽子送出システムを備える。本システムは、陽子のそれぞれについて、オブジェクトの前及び後の軌跡、並びに、オブジェクトを通過した後のエネルギーを測定するように構成された検出器システムを更に備える。本システムは、検出器システムから信号を読み出し、それによって陽子のそれぞれの軌跡及びエネルギーを表す測定データを得るように構成されたデータ収集システムを更に備える。本システムは、測定データを処理して画像再構成を実施し、それによってオブジェクトのコンピュータ断層画像を得るように構成されたプロセッサを更に備える。画像再構成は、総変動優秀化に基づく反復の投影ベース再構成アルゴリズムを含む。
【0017】
幾つかの実施態様において、本開示は、陽子治療システムに関する。本システムは、第1の平均エネルギー及び第2の平均エネルギーを有する陽子ビームを送出するように構成された陽子送出システムを備える。第1の平均エネルギーは、第1のブラッグピークが、身体の一部分の内部のターゲット領域内の場所で起こるように選択される。第2の平均エネルギーは、陽子ビームが、身体の一部分を通過するように選択される。本システムは、ターゲット領域に対する第1のエネルギーのビームの送出を容易にするように構成された第1の検出器システムを更に備える。本システムは、第2のエネルギーを有し、身体の一部分を通過する陽子のそれぞれについて、身体の一部分の前及び後の軌跡、並びに、身体の一部分を通過した後のエネルギーを測定するように構成された第2の検出器システムを更に備える。本システムは、少なくとも第2の検出器システムから信号を読み出し、それによって第2のエネルギーの陽子のそれぞれの軌跡及びエネルギーを表す測定データを得るように構成されたデータ収集システムを更に備える。本システムは、測定データを処理して画像再構成を実施し、それによって身体の一部分のコンピュータ断層画像を得るように構成されたプロセッサを更に備える。画像再構成は、総変動優秀化に基づく反復の投影ベース再構成アルゴリズムを含む。
【0018】
幾つかの実施態様において、本開示は、有形コンピュータ可読記憶媒体であって、該有形コンピュータ可読記憶媒体上に記憶されたコンピュータ実行可能命令を有し、該コンピュータ実行可能命令は、1つ又は複数のコンピューティングデバイスを有するコンピューティングシステムによって可読であり、コンピュータ実行可能命令は、複数の陽子に関するデータを取得することを含む動作を、コンピューティングシステムに実施させるように、該コンピューティングシステム上で実行可能である、有形コンピュータ可読記憶媒体に関する。データは、陽子のそれぞれについて第1のトラック及び第2のトラックに関する情報を含む。データは、第1のトラックと第2のトラックとの間での各陽子のエネルギー損失に関する情報を更に含む。この動作は、各陽子について、第1のトラックと第2のトラックとの間の経路を推定することを更に含む。この動作は、総変動優秀化に基づく反復の投影ベース再構成アルゴリズムを使用して、陽子のエネルギー損失及び経路に基づいて相対阻止能分布の断層撮影解析を実施することを更に含む。
【0019】
幾つかの実施態様において、本開示は、粒子放射線治療システムに関する。本システムは、第1の平均エネルギー及び第2の平均エネルギーを有するイオンビームを送出するように構成された粒子放射線送出システムを備える第1の平均エネルギーは、第1のブラッグピークが、身体の一部分の内部のターゲット領域内の場所で起こるように選択される。第2の平均エネルギーは、イオンビームが、身体の一部分を通過するように選択される。本システムは、ターゲット領域に対する第1のエネルギーのビームの送出を容易にするように構成された第1の検出器システムを更に備える。本システムは、第2のエネルギーを有し、身体の一部分を通過するイオンのそれぞれについて、身体の一部分の前及び後の軌跡、並びに、身体の一部分を通過した後のエネルギーを測定するように構成された第2の検出器システムを更に備える。本システムは、少なくとも第2の検出器システムから信号を読み出し、それによって第2のエネルギーのイオンのそれぞれの軌跡及びエネルギーを表す測定データを得るように構成されたデータ収集システムを更に備える。本システムは、測定データを処理して画像再構成を実施し、それによって身体の一部分のコンピュータ断層画像を得るように構成されたプロセッサを更に備える。画像再構成は、総変動優秀化に基づく反復の投影ベース再構成アルゴリズムを含む。
【0020】
幾つかの実施態様において、イオンは陽子を含む。幾つかの実施態様において、イオンは炭素イオンを含む。
【0021】
本開示を要約するために、本発明の或る特定の態様、利点及び新規の特徴が本明細書で述べられている。全てのこうした利点を、本発明の任意の特定の実施形態によって達成することが必ずしもできるわけではないことが理解される。そのため、本発明は、本明細書で教示又は示唆される可能性がある他の利点を必ずしも達成することなく、本明細書で教示される1つの利点又は利点の群を達成するか又は最適化するように、具現化又は実行することができる。
【図面の簡単な説明】
【0022】
【図1A】幾つかの実施態様において、陽子コンピュータ断層撮影(pCT)システムを撮像システムとして構成することができることを概略的に示す図である。
【図1B】幾つかの実施態様において、pCTシステムを、陽子治療システムを使用して患者の処置を容易にするように構成することができることを概略的に示す図である。
【図2A】光子治療及び陽子治療についての例示的な線量プロファイルを示す図であり、陽子は、ターゲットにされる所望の領域においてより選択的な線量送出を提供するように構成することができる。
【図2B】光子治療及び陽子治療についての例示的な線量プロファイルを示す図であり、陽子は、ターゲットにされる所望の領域においてより選択的な線量送出を提供するように構成することができる。
【図3A】所望のターゲットに対する陽子のブラッグピークの場所の間違った計算が、ターゲットの外の領域の望ましくない照射をもたらし得ることを示す図である。
【図3B】所望のターゲットに対する陽子のブラッグピークの場所の間違った計算が、ターゲットの外の領域の望ましくない照射をもたらし得ることを示す図である。
【図4】X線コンピュータ断層撮影(CT)を使用した所望のターゲットの識別に基づいて、陽子飛程を処置のためにどのように調整することができるかを概略的に示す図である。
【図5】関心体積を通過する陽子の特徴付けに基づいて断層撮影を実施するためのプロセスを示す図であり、こうした断層撮影から得られる情報は、所望のターゲットの識別等の多数のアプリケーションで利用することができる。
【図6】図5の断層撮影プロセスを容易にするための、陽子ビーム構成及びターゲットを通過する陽子の検出の例を概略的に示す図である。
【図7】幾つかの実施態様において、pCTシステムが、ターゲットを通過する単一陽子を追跡し、該単一陽子のエネルギー損失を確定することが可能であるように構成された検出器を含むことができることを示す図であり、こうした測定は、ターゲットの少なくとも一部分の画像の断層再構成を可能にするために、ターゲットに対して複数の配向で実施することができる。
【図8】図7の例示的なpCT検出器を搭載するための例示的なプラットフォームを示す図である。
【図9】人間等の被検体のpCT撮像を実施するように構成された例示的なシステムを示す図である。
【図10】ターゲットの上流又は下流で単一陽子を追跡するように構成された例示的な追跡検出器の部分分解図である。
【図11】単一陽子のエネルギーを測定することが可能であるように構成された例示的な熱量計を示す図である。
【図12】ターゲット内の多重クーロン散乱(MCS)等の作用によって陽子の経路がどのように偏向し得るか、及び、最尤経路(MLP)をどのように推定することができるかの例を示す図である。
【図13】陽子経路が真っすぐであるという仮定に基づく再構成画像と陽子のMLPを組込んだ再構成画像との間の比較を示す図である。
【図14】オブジェクトを通過する陽子の測定に基づいて、オブジェクトを特徴付けするための例示的な再構成方法を概略的に示す図である。
【図15】図14の再構成方法に対する例示的な離散的手法を概略的に示す図である。
【図16】図15の離散的手法のより詳細な例を示す図である。
【図17】図15の離散的相互作用手法を記述するシステム行列を推定するために、陽子経路とターゲットのボクセルとの交差をどのように特徴付けることができるかの例を示す図である。
【図18】図15の離散的相互作用手法を記述するシステム行列を推定するために、陽子経路とターゲットのボクセルとの交差をどのように特徴付けることができるかの例を示す図である。
【図19A】シミュレートされたデータの再構成の例示的な結果を示す図である。
【図19B】シミュレートされたデータの再構成の例示的な結果を示す図である。
【図20A】陽子エネルギー測定が実質的に雑音なしであり、また、MLPが実質的に正確である理想的な再構成状況について複数の超平面を示す図であり、各超平面は、実質的に全ての超平面が、真のオブジェクト関数を表す点で交差するように、ターゲットの離散的ボクセルにおける陽子の相互作用を表すシステム行列による投影に対して、ターゲットのオブジェクト関数の変換を特徴付ける連立一次方程式の一方程式を表す。
【図20B】超スラブが真のオブジェクト関数を含む凸領域で交差することができるように、陽子測定が雑音なしではなく、かつ、MLPが正確でないより現実的な再構成状況について複数の超スラブを示す図である。
【図21A】様々な投影技法についての例示的な性能結果を示す図である。
【図21B】様々な投影技法についての例示的な性能結果を示す図である。
【図22】様々な投影技法についての例示的な性能結果を示す図である。
【図23】様々な投影技法についての例示的な性能結果を示す図である。
【図24】優秀化方法を利用して陽子CT投影解を得るために実装することができるプロセスを示す図である。
【図25】ターゲットオブジェクトを特徴付けるための、優れた陽子CT解を使用するために実装することができるプロセスを示す図である。
【図26A】優秀化方法を含む、種々の再構成スキームを調査するために陽子データをシミュレートするための例示的な陽子CT構成を示す図である。
【図26B】優秀化方法を含む、種々の再構成スキームを調査するために陽子データをシミュレートするための例示的な陽子CT構成を示す図である。
【図27】シミュレートされた陽子データに基づく種々の再構成スキームの例示的な結果を示す図である。
【図28A】シミュレートされた陽子データに基づく種々の再構成スキームの例示的な結果を示す図である。
【図28B】シミュレートされた陽子データに基づく種々の再構成スキームの例示的な結果を示す図である。
【図28C】シミュレートされた陽子データに基づく種々の再構成スキームの例示的な結果を示す図である。
【図29】シミュレートされた陽子データに基づく種々の再構成スキームの例示的な結果を示す図である。
【図30】実験的陽子データに適用される、選択された再構成スキームを使用して得られる例示的な陽子CT画像を示す図である。
【発明を実施するための形態】
【0023】
本明細書に設けられる表題は、たとえあっても、単に便宜上のものであり、必ずしも特許請求される本発明の範囲にも意味にも影響を及ぼさない。
【0024】
本明細書には、相互作用する放射線として陽子を使用して、コンピュータ断層撮影(CT)を実施するための方法及び関連するシステムが述べられる。本明細書の説明は陽子に関して行われるが、本開示の1つ又は複数の特徴は、正に帯電した他のイオンを使用したCTアプリケーションにも同様に実装することができることも理解されるであろう。
【0025】
図1Aは、幾つかの実施形態において、陽子コンピュータ断層撮影(pCT)オペレーションを実施し、オブジェクト110の1つ又は複数の部分のCT画像として表すことができるデータを与えるように撮像システム100を構成することができることを示す。撮像システム100は、オブジェクト110に陽子ビームを送出するように構成された陽子ビームコンポーネント102を含むことができる。エネルギー、方向及び強度等の陽子ビームの種々のパラメータを制御することは、複数の既知の方法で達成することができる。
【0026】
撮像システム100は、オブジェクト110に入射する陽子及びオブジェクトを通過した陽子を特徴付けるように構成された検出器コンポーネント104を更に含むことができる。幾つかの実施態様では、こうした検出器コンポーネント104は、単一陽子を特徴付けることが可能であるように構成することができる。陽子のこうした特徴付けを容易にすることができるデバイスの例は、本明細書でより詳細に述べられる。
【0027】
撮像システム100は、CT解析を容易にするために、検出器コンポーネント104から信号を読出すように構成されたデータ収集(DAQ)コンポーネント106を更に含むことができる。DAQコンポーネント106によって実施される信号処理量は、変動し得る。
【0028】
幾つかの実施態様では、種々の検出器からの信号は、1つ又は複数のアナログ/デジタル変換器(ADC)によってデジタル信号に変換することができ、こうしたデジタル信号は、制御コンポーネント112の制御下で読み出すことができる。イベントトリガー、イベント信号のタイミング及び読出し、並びに検出器のリセット等の種々の制御パラメータも、制御コンポーネント112が制御することができる。
【0029】
幾つかの実施態様では、撮像システム100は、デジタル化信号を受信し、オブジェクト110の上流及び下流での陽子の追跡、並びに、オブジェクト110を通過した下流の陽子のエネルギーの計算等の解析を実施するように構成されるプロセッサ108を更に含むことができる。幾つかの実施態様では、断層再構成処理もまた、プロセッサ108によって実施することができる。他の実施態様では、こうした断層再構成処理は、別個のプロセッサによって実施することができる。
【0030】
幾つかの実施態様では、撮像システム100は、システム100の1つ又は複数のコンポーネントのオペレーションを容易にする情報及び/又は実行可能命令を記憶するように構成されたコンピュータ可読媒体114を更に含むことができる。幾つかの実施態様では、コンピュータ可読媒体114は、本明細書で述べる1つ又は複数の再構成プロセスの実施を容易にする情報及び/又は実行可能命令を含むことができる。幾つかの実施態様では、こうした情報及び/又は実行可能命令は、一時的でない方法で記憶することができる。
【0031】
幾つかの実施態様では、本開示の1つ又は複数の特徴は、陽子線治療システム又は炭素ビーム治療システム等の放射線治療システム120に組込むことができる。治療システム120は、患者130に陽子線又は炭素イオンビームを送出するように構成された陽子線コンポーネント又は炭素ビームコンポーネント122を含むことができる。陽子又は炭素イオンのこうしたビームは、患者に対する治療効果をもたらすように構成することができる。或る特定の実施態様では、陽子ビームコンポーネント122は、図1Aを参照して上述したように、断層解析を可能にするために、患者を通過することができる陽子ビームを与えるようにも構成することができる。こうしたビームを提供することができる方法の例は、本明細書で更に詳細に述べられる。
【0032】
撮像システム120は、陽子ビームの処置利用を容易にするように構成された検出器コンポーネント124を更に含むことができる。こうした検出器コンポーネント124は、エネルギー、方向及び強度等の所望のパラメータを用いて患者130に入射する陽子を特徴付けるように構成されるデバイスを含むことができる。こうしたデバイスは、複数の既知の方法で実装することができる。
【0033】
幾つかの実施態様では、検出器コンポーネント124は、図1Aを参照して述べたpCT撮像機能のようなpCT撮像機能を容易にするように構成されるデバイスを更に含むことができる。幾つかの実施形態では、治療に関連する検出デバイスのうちの少なくとも幾つかは、pCT撮像のためにも利用することができる。例えば、患者の上流のビーム検出器は、撮像モードのオペレーション中に患者に入射する個々の陽子を特徴付けるために利用することができる。
【0034】
撮像システム120は、治療モード及び/又は撮像モードのオペレーションを容易にするように構成されたデータ収集(DAQ)コンポーネント126と、制御コンポーネント132と、プロセッサコンポーネント128と、コンピュータ可読媒体コンポーネント134とを更に含むことができる。
【0035】
適切に構成された陽子又は炭素イオン放射線(すなわち、帯電した粒子放射線)は、或る特定のがん処置等の治療アプリケーションにおいて多くの利益を提供することができる。こうした利益のうちの1つの利益は、所与の物質内での陽子の移動の終りにおける急激なエネルギー損失による可能性がある。こうした急激なエネルギー損失は、ブラッグピークと呼ばれる比較的急峻なピークを有し、(同じビームエネルギーを有する)粒子のうちのほんの僅かの粒子が、こうした深さを超えて貫入する。こうしたブラッグピークの深さの位置は、特定のビームエネルギーに依存し得る。一般に、より深いブラッグピークは、より高いエネルギー粒子ビームによって達成することができる。治療に使用される陽子は、約70MeV/原子質量単位〜250MeV/原子質量単位の範囲のエネルギーを有することができ、炭素イオンは、430MeV/原子質量単位までの範囲のエネルギーを有することができる。
【0036】
図2Aは、エネルギー陽子が所与の物質(例えば、組織)内で移動するときの、深さの関数としてのエネルギー損失プロファイル142のブラッグピーク144の例を示す。比較すると、電磁放射線(例えば、X線又はガンマ線)についての相対的線量プロファイル140は、最大まで比較的急峻に上昇し、それに続いて、深さの関数として徐々に減少している。したがって、陽子ベース放射線は、陽子と炭素イオンの使用によって提供される同様の終了範囲制御を提供しない。
【0037】
図2Bは、複数の初期(pristine)ブラッグピークが結合されて、累積線量プロファイル152の拡大ブラッグピーク(spread out Brag Peak)(SOBP)154をもたらすことができることを示す。こうした初期ブラッグピークは、同じ体積を、異なるエネルギーを有する陽子ビームに晒すことによって達成することができる。結果として得られる拡大ブラッグピーク154の位置は、ターゲット領域150の深さ境界にオーバーラップするように選択することができる。ビームエネルギーが適切に選択される場合、拡大ブラッグピークは、ターゲット領域の遠位境界を超えると急激に降下し得る。
【0038】
上記に基づいて、ターゲット領域の深さ境界と、拡大ブラッグピークとを適切に一致させることは、粒子治療の重要な考慮事項であり得る。拡大ブラッグピークの遠位部分が、図3Aの例の場合のように深すぎる場合、不必要かつ有害な放射線線量(例えば、ブラッグピーク164のかなりの部分)が、ターゲット領域160の遠位境界を越えた領域に提供される。拡大ブラッグピークの近位部分が、図3Bの例の場合のように浅すぎる場合、不必要で余分な放射線線量(例えば、ブラッグピーク162のかなりの部分)が、ターゲット領域160の近位境界の前の領域に提供される。他方で、深すぎる拡大ブラッグピークの近位部分及び/又は浅すぎる拡大ブラッグピークの遠位部分は、ターゲット領域の或る特定の部分が適切に照射されないことをもたらす場合がある。
【0039】
所与の媒体内での陽子貫入深さの上記の不確実性は、媒体と異なるように相互作用する異なるプローブ放射線による媒体の特徴付けからもたらされる可能性がある。図4は、所与のエネルギーを有し、所与の媒体を横切る陽子ビームの飛程を求めるために使用することができる一般的なプロセスを示す。同様のプロセスは、炭素イオンビームについて適用することができ、その差は、陽子の相対阻止能の代わりに、炭素イオンの相対阻止能(陽子についての陽子阻止能に原子数比の2乗(ZC/Zp)2=36を乗算することによって推定することができる)が使用されることである。オブジェクトの減衰係数測定に基づいて画像を取得するために、X線CTをオブジェクト(例えば、患者)に対して実施することができる(ブロック150)。こうした測定は、ハウンスフィールド単位スケールに変換することができる(ブロック152)。媒体内での陽子又は炭素イオンの、計算された相対阻止能は、ハウンスフィールドスケール測定に基づいて取得することができる(ブロック154)。陽子又は炭素イオンの飛程は、陽子又は炭素イオンについて、ビームエネルギー及び物質の相対阻止能の関数として表すことができるため、計算された陽子又は炭素イオンの飛程を取得することができる(ブロック156)。
【0040】
X線CT測定から陽子飛程を計算する上記のプロセスは、陽子の飛程又は炭素イオンの飛程の約3.5%の不確実性をもたらす可能性がある。こうした相対的な不確実性は、人間の身体の様々な部分についての様々な距離に等しいとすることができる。例えば、3.5%の相対的不確実性は、脳で約3mm〜5mmに等しく、骨盤で約10mm〜12mmに等しい。更なる不確実性が、未知の密度を有する物質の存在及びX線CT画像のストリーク状アーティファクトによって導入され得る。
【0041】
幾つかの実施態様では、本明細書に述べるようなpCT技法に基づく陽子又は炭素イオンの飛程の確定によって、飛程の不確実性を陽子の飛程の約1%以下に低減することができる。図5は、陽子コンピュータ断層撮影を実施するために実装することができるプロセス170を示す。図6は、図5のプロセス170のために実装することができる例示的な構成を示す。
【0042】
ブロック172において、陽子ビームを、関心体積を有するオブジェクトに提供することができる。幾つかの実施態様では、ビームは、ビーム内の陽子のかなりの部分がオブジェクトを通過するように構成することができる。例えば、また、図6に示すように、陽子ビームには、結果として得られるブラッグピーク182が関心体積の遠位境界を過ぎた所で起こるようにエネルギーを提供することができる。幾つかの実施態様では、撮像されるオブジェクトは、関心体積を画定することができる。こうした状況では、陽子は、オブジェクト全体を通過し、オブジェクトの下流で検出することができる。
【0043】
ブロック174において、体積を通過する複数の陽子のそれぞれを追跡することができる。例えば、図6に示すように、こうした追跡は、関心体積180の上流及び下流にある陽子の追跡を含むことができる。こうした追跡の例は、本明細書でより詳細に述べられる。
【0044】
ブロック176において、追跡された各陽子のエネルギー損失を測定することができる。例えば、図6に示すように、こうしたエネルギー測定は、体積180の上流にある陽子についての平均ビームエネルギーの測定と、熱量計等のエネルギー検出器による、下流の各陽子の測定とを含むことができる。こうしたエネルギー測定の例は、本明細書でより詳細に述べられる。
【0045】
ブロック178において、コンピュータ断層撮影解析を、陽子の追跡情報及びエネルギー損失情報に基づいて実施することができる。例えば、図6に示すように、こうしたCT解析は、複数の異なる向きで体積180に入射し(184)、体積180を通過する(186)陽子に関するこうした情報を測定することによって容易にすることができる。こうした向きの変化の例は本明細書でより詳細に述べられる。
【0046】
図7は、幾つかの実施形態において、検出器の組立体を、オブジェクト(例えば、患者の一部分)200に入射する個々の陽子及びオブジェクト200を通過した後の個々の陽子の測定を可能にするように構成することができることを示す。例えば、単一陽子192が、オブジェクト200に入射し(194)、オブジェクト200を横切り(196)、オブジェクト200を通過した(198)として示される。
【0047】
幾つかの実施態様では、上流検出器202は、陽子192について入射トラック(194)情報を提供することができ、下流検出器204は、陽子192について下流トラック(198)情報を提供することができる。本明細書で述べるように、陽子が、オブジェクト200を横切るときにとる経路196は、CT解析を容易にするために推定することができる。
【0048】
上流追跡検出器202及び下流追跡検出器204は、複数の方法で実装することができる。上流追跡検出器202は、陽子がオブジェクト200に入るときの陽子の空間ベクトル及び場所の確定を可能にするように構成することができる。同様に、下流追跡検出器204は、陽子がオブジェクト200を出るときの陽子の空間ベクトル及び場所の確定を可能にするように構成することができる。こうした情報に基づいて、横断経路196を、本明細書で述べるように推定することができる。
【0049】
幾つかの実施態様では、上流追跡検出器202及び下流追跡検出器204のそれぞれは2つ以上の2D位置感応性検出面を含むことができる。例えば、上流検出器202は、2つの2D位置感応性検出面202a、202bを含むことができ、下流検出器204は、2つの2D位置感応性検出面204a、204bを含むことができる。2D位置感応性検出面202a、202b、204a、204bのそれぞれは、例えばマイクロストリップ検出器(例えば、シリコンストリップ検出器)を含む、複数の方法で実装されたX位置感応性面及びY位置感応性面を含むことができる。(例えば、高計数環境で)追跡が不明瞭である可能性がある幾つかの状況では、更なる位置感応性面(例えば、U及び/又はV面)を付加することができるか、又は、より高速な検出器及び/又は読出しシステムを、こうした不明瞭さを低減するために使用することができる。
【0050】
図7を参照すると、検出器の組立体は、下流の陽子のエネルギーを検出するように構成されたエネルギー検出器206を更に含むことができる。こうしたエネルギー検出器は、例えば、多結晶ベース熱量計を含む、複数の方法で実装することができる。こうしたエネルギー検出器の例は、本明細書でより詳細に述べられる。
【0051】
或る特定の実施態様では、複数の他の検出器及び/又はデバイスを、種々の機能を提供するために含めることができる。例えば、2重粒子又は入射ストレイ(stray)粒子を含むイベントを識別し拒否し得るビーム規定カウンターを含めることができる。別の例では、偽信号を拒絶しながら、良好なイベントを規定しトリガーするように構成されたカウンター及び回路も含めることができる。
【0052】
図7を参照すると、検出器のこうした組立体及び/又はオブジェクト200は、CT解析のために複数の向きで陽子データを取得することを容易にするために、選択された軸の回りに回転させることができる。例えば、検出器の組立体は、オブジェクト200の軸212の回りに一緒に回転する(矢印210)ように構成することができる。
【0053】
他の例では、検出器、オブジェクト、又はそれらの何らかの組合せが、CT機能を容易にするために、回転及び/又は並進することができることが理解されるであろう。例えば、図8は、検出器(例えば、2D位置感応性検出器230、232、234、236及びエネルギー検出器238)の組立体を、実質的に固定してプラットフォーム226に搭載し、陽子ビーム250を受信して下流の陽子を検出するように向けることができる構成220を示す。特徴付けされるオブジェクト222は、CT機能を提供するために、軸の回りのオブジェクト222の回転を可能にするように、搭載構造224に搭載することができる。オブジェクトが回転するこうした構成は、オブジェクト222が無生物オブジェクト(例えば、ファントム)であり、かつ、陽子ビームが実質的に固定方向を有する場合に、より適切であり得る。
【0054】
別の例では、図9は、オブジェクト262(例えば、患者)が実質的に静止しており、かつ、検出器(例えば、上流追跡検出器272、下流追跡検出器274、及びエネルギー検出器276)の組立体を、オブジェクト262によって規定される軸280の回りに回転するように構成することができる構成260を示す。
【0055】
例示的な検出器272、274、276は、軸280の回りの検出器組立体の回転(矢印282)を可能にする回転可能構造270に搭載することができる。静止オブジェクト262は、例えば、安定した構造266に搭載された支持構造264によって達成することができる。幾つかの実施形態では、支持構造264は、陽子290が上流検出器272と下流検出器274との間で移動する領域を出入りするオブジェクトの移動を可能にするように構成することができる。検出器組立体がオブジェクトの回りに回転するこうした構成は、オブジェクト262が、人間の患者等の生き物である場合により適切であり得る。
【0056】
幾つかの実施態様では、図9の例示的な構成260の検出器の一部又は全ては、処置ガントリ設計を有する陽子治療システムのような陽子治療システムに組込むことができる。こうした設計では、患者を、ビームラインの内外に移動させることができる。ビームラインは、処置陽子の所望の送出のために患者の回りに回転することができる。
【0057】
こうしたシステムの場合、上流検出器と、下流検出器と、エネルギー検出器とは、ビームラインとともに回転するように回転可能構造に搭載することができる。こうした検出器は、所定場所に固定することができるか、又は、治療オペレーションを妨げないように、格納可能とすることができる。幾つかの実施形態では、治療システムのビーム制御デバイスは、上流追跡検出器に関連する機能の一部又は全てを提供することができる。
【0058】
図10は、図7〜図9を参照して述べた上流追跡検出器又は下流追跡検出器として利用することができる例示的なトラッカモジュール300を示す。本明細書で開示される多数のpCT結果が、こうしたデバイスを使用して得られた。図示するように、トラッカモジュール300は、2つ以上の2D位置感応性検出器を保持するように構成されたハウジング302を含むことができる。こうした2D位置感応性検出器306のうちの1つが、部分的に除去されて示され、他の2D位置感応性検出器は、図10では取除かれている。
【0059】
2D位置感応性検出器306は、アクティブエリア308(例えば、シリコンストリップ検出素子を有する長方形)と、検出素子を制御し、検出素子から信号を読出すための回路310と、電力、制御信号、読出し信号等を供給するためのインタフェース312とを含むことができる。
【0060】
ハウジング302は、相互作用の確率が比較的低い状態での陽子の通過を可能にするために、(設置すると)2D位置感応性検出器306のアクティブエリア308に好ましくは整列する窓304を含むことができる。必要であるとき、こうした窓は、マイラー等の物質の薄いシートを含むことができる。
【0061】
ハウジング302は、モジュール300が、(例えば、オブジェクトが回転可能である場合)静止状態になるか又はオブジェクト(図示せず)の回りに回転可能であることを可能にするために、モジュール300を支持構造に搭載することを可能にするように構成することができる。
【0062】
図11は、図7〜図9を参照して述べた例で利用することができる例示的なエネルギー検出器320を示す。本明細書で開示される複数のpCT結果が、こうしたデバイスを使用して得られた。図示するように、エネルギー検出器320は、分割型(segmented)エネルギー検出能力を提供するように配列された複数の検出器結晶322(例えば、CsI結晶)を含むことができる。図示の例では、結晶322は、グリッド様分割を提供するために、グリッドアレイで詰めることができる。結晶322の前面の寸法及び結晶322の深さ等の設計パラメータは、下流の陽子の予想されるエネルギー範囲及び強度に対応するように選択することができる。
【0063】
図11を参照すると、結晶322の後端が、光検出器326に結合されているものとして示される。こうした光検出器は、例えば、種々のタイプの光電子増倍管の使用を含む多数の方法で実装することができる。例えば、下流の陽子の飛程を検出するように構成された、固体検出器又は有機シンチレータ若しくは無機シンチレータの積重体を含む多数の他のタイプのエネルギー検出器も利用することができる。
【0064】
図11では、結晶322は、ハウジング324内に詰められているものとして示される。こうしたハウジングは、エネルギー検出器320が、(例えば、オブジェクトが回転可能である場合)静止状態になるか又はオブジェクト(図示せず)の回りに回転可能であることを可能にするために、エネルギー検出器320を支持構造に搭載することを可能にするように構成することができる。
【0065】
本明細書で述べるように、特徴付けされるオブジェクト内での陽子の相互作用は通常、入射方向からの方向変化及び入射エネルギーからのエネルギー損失をそれぞれもたらす。陽子は、オブジェクトを通過するとき、ターゲット原子の核ポテンシャルにおける散乱によって、複数回の小角偏向を受ける可能性があり、こうした偏向は、元の方向からの、実質的にランダムな巨視的逸脱をもたらす可能性がある。幾つかの状況では、こうした逸脱は、数度程度の大きさである可能性があり、オブジェクトの遠位端上で(入口点及び入口方向の直線投影に対して)出口点の著しい(例えば、最大数ミリメートルの)変位をもたらす。
【0066】
図12は、陽子が、入射方向400及び入口点402でオブジェクト410を横切り、出射方向404及び出口点406で出る際の、こうした小角偏向の例の2次元表現を示す。この例では、出射方向は、入る方向から逸脱しており、同様に、出口点406は、陽子が、直線で移動する場合に到達することになる投影点408からシフトしている。
【0067】
こうした多重クーロン散乱(MCS)作用は、陽子の軌跡Lに不確実性を生じる可能性がある。こうした軌跡は、陽子CT画像の空間分解能に寄与する可能性があるため、軌跡の正確な推定が望ましい。幾つかのターゲットオブジェクトにおいて、オブジェクト内での陽子の実際の経路に関する直接的な情報は存在しない。しかし、オブジェクトの前及び後の陽子の経路について知識が与えられると、オブジェクト内での最尤経路を推定するための多数の技法が存在する。例えば、準解析的計算を、複数散乱のガウス近似に関して実施することができる。別の例では、モンテカルロシミュレーションのセットを、オブジェクトのサイズ、オブジェクトの物質、ビームエネルギー、並びに検出される陽子経路及びエネルギー等の因子を含むことができる所与の構成に基づいて実施することができる。
【0068】
図12では、入射経路400及び出射経路404に対応する最尤経路(MLP)は、曲線420として示され、こうした軌跡は、CT再構成に使用することができる。
【0069】
幾つかの実施態様では、多重クーロン散乱等の作用から生じる上記の経路逸脱は、一部の画像再構成アルゴリズムの効果を減少させる可能性がある。例えば、フィルタ補正逆投影(filtered back projection)(FBP)は、X線CTシステムで使用される一般的な再構成方法であり、特徴付けられるオブジェクトの内部で、光子が直線上に進むと仮定する。
【0070】
こうした方法が、陽子CT画像再構成に利用されるとき、画像品質が、大幅に悪化する。図13は、陽子CT画像を示し、ここで、上側画像は、FBP法を使用して得られ、下側画像は、MLPを組込むことによって得られた。一般に、FBP画像は、MLP画像より品質が低いことがわかる。例えば、FBP画像のかなりの部分がぼけている。
【0071】
陽子は、その軌跡Lに沿って媒体を横切るにつれ、媒体との相互作用によるエネルギー損失を被る。以下の積分は、このエネルギー損失を含む。
【0072】
【数1】
【0073】
ここで、Ein及びEoutは、それぞれ、入射エネルギー及び出射エネルギーを表し、Swater(E)は、水中でのエネルギー依存の陽子阻止能関数を表す。さらに、こうした積分は、
【0074】
【数2】
【0075】
となるように、陽子経路に沿う、相対電子密度又は相対陽子阻止能の積分に実質的に等しくなるように設定することができる。幾つかの実施態様では、陽子経路は、最尤経路(MLP)として近似することができる。
【0076】
所与の被検出陽子の場合、方程式1の左辺は、陽子の入射エネルギー及び出射エネルギーが測定されるため、求めることができる。そのため、陽子のMLPを知ることによって、オブジェクトの電子密度に密接に関連する相対阻止能ηeをMLPに沿って計算することが可能になる。十分な数のこうした陽子が与えられると、相対阻止能関数ηeを、特徴付けされるオブジェクト内の関心領域について計算することができる。こうした関数ηeは、高品質画像の生成を可能にするために、十分に詳細に求めることができる。
【0077】
図14は、幾つかの実施態様において、出力陽子504を得るために、オブジェクト500を横切り、オブジェクト500と相互作用する複数の入力陽子502を変換510 M・x=gとして表すことができることを示し、ここで、xは、オブジェクトに関連する相互作用パラメータ(例えば、電子密度又は相対阻止能(RSP)等の電子密度ベース量)の3次元分布であり、Mは、gを得るためにxに作用する作用素であり、gは、測定データを表す。そのため、オブジェクト関数xは、x=M−1・gとして求めることができ、ここで、M−1はMの逆作用素である。本明細書で述べるように、作用素が、例えば正方行列であるとき、作用素の逆が適切であり得る。こうした正方行列が要件でないことが理解されるであろう。作用素行列が、より一般的な長方形行列である状況では、オブジェクト関数xは、x=M†・gとして求めることができ、M†(「Mダガー」)は、Mの共役転置である。同様な表記を本明細書で述べる他の作用素(例えば、図15の作用素A)に適用することができることが理解されるであろう。
【0078】
図15は、幾つかの実施態様において、図14の変換の一般的な形態を、オブジェクト520がベクトルにデジタル化される離散的変換522として近似することができることを示す。こうした変換は、A・x=bとして表すことができ、ここで、xは、離散的なオブジェクトベクトルであり、Aは、bを得るためにxに作用する作用素であり、bは、測定データのベクトルを表す。そのため、オブジェクトベクトルxは、x=A−1・bとして求めることができ、ここで、A−1はAの逆作用素である。
【0079】
幾つかの実施態様では、図15の離散的変換522は、オブジェクトベクトルxが、n個の要素x1、x2、x3、...、xnを有する列ベクトルであり、測定ベクトルbが、m個の要素b1、b2、b3、...、bmを有する列ベクトルであり、変換作用素Aが、m×n行列であるような、連立一次方程式を表すことができる。
【0080】
図16は、オブジェクトベクトルxとして表すことができるデジタル化されたオブジェクト520の例を示す。オブジェクト520は、複数のボクセル530を有するものとして示される。i番目の陽子532は、その経路(例えばMLP)に沿って複数のボクセル530に交差するように、デジタル化されたオブジェクト520を横切るものとして示される。陽子532は、測定ベクトルbのi番目の値を得るために、オブジェクト520を出て、検出器によって測定されるものとして更に示される。幾つかの実施態様では、変換行列Aの要素aijは、i番目の陽子とオブジェクトベクトルxのj番目のボクセルとの交差長等の相互作用パラメータを表すことができる。
【0081】
幾つかの実施態様では、変換行列Aは、交差長(aijs)の推定を容易にするために、複数の方法で構成することができる。例えば、最尤経路(MLP)は、ボクセルサイズに対するステップサイズ(例えば、半ボクセルステップ等のボクセル以下のステップサイズ)で離散化することができる。
【0082】
幾つかの実施態様では、交差長aijは、複数の方法で推定することができる。例えば、MLPと交差する任意のボクセルに、交差長について一定値を割り当てることができる。別の例では、所与のボクセルと交差するMLPのコードの長さを計算し、そのボクセルに割り当てることができる。更に別の例では、平均有効コード長係数に、MLPに沿うボクセルの全てに割り当てられた一定値を乗算することができ、こうした係数は、オブジェクトグリッド上での陽子の入射角度に基づくことができる。
【0083】
図17は、上記の平均有効コード長係数の例示的なプロット540を示し、示す入射角度は、水平入射がゼロの入射角度を有するように配向されたオブジェクトグリッド520(図18)を基準とする。こうした例では、水平交差は、1の係数を与えられ、45度交差は、最小値を与えられる。こうした割当ては、角度の付いた交差(例えば、矢印542によって示される区画)が、たとえ全対角長がより長くても、横寸法(例えば、正方ボクセルの水平寸法)より短い可能性が高いことを考慮する。幾つかの実施態様では、上記の単一パラメータ(入射角度)に基づく調整は、望ましいことには、処理時間を減少させることができる。
【0084】
図19A及び図19Bは、上記の交差長推定の使用から得ることができる画像品質及び阻止能特徴付けの性能の例を示す。図19Aでは、左上画像は、2次元陽子ビームを使用したモンテカルロシミュレーションから得られるファントムの再構成画像である。右上画像は、一定相互作用長手法を使用したファントムの再構成画像である。左下は、有効平均コード長係数手法についてのものであり、右下は、ボクセルごとに計算したコード長手法についてのものである。
【0085】
一定相互作用長手法から得られる画像は、有効平均コード長係数手法及びボクセルごとに計算したコード長手法を使用して得られた画像に比べて、比較的雑音が多いことが示される。画像品質は別として、また、図19Bに示すように、有効平均コード長係数手法及びボクセルごとに計算したコード長手法は、一定相互作用長手法の再現に比べて、ファントム内の種々の特徴部の相対阻止能のより正確な再現をもたらす。
【0086】
幾つかの実施態様では、図15及び図16を参照して本明細書で述べる連立一次方程式(例えば、A・x=b)は、次のように表すことができる。ベクトルbは、bが、m個の要素bi(i=1〜m)を有するように、m個の陽子について測定(例えば、エネルギー損失)ベクトルを表すことができる。ベクトルxは、特徴付けされるオブジェクトのパラメータ(例えば、相対阻止能、RSP)の値を有する未知の画像ベクトルとすることができる。そのため、そのMLPに沿ってオブジェクトを横切り、測定されるエネルギー損失をもたらすi番目の陽子に関して、ベクトルbのi番目の要素、すなわちbiは、MLPに沿う積分されたRSPを表す。こうした量は、例えば既知の厚さ及び相対阻止能の物質のブロックを横切った陽子に対するエネルギー検出器の応答を較正することによって測定することもできるし、
【0087】
【数3】
【0088】
になるように、方程式1の左辺によって数値的に計算することもできる。ここで、Swaterは、
【0089】
【数4】
【0090】
によって与えられる水中の陽子阻止能を表す。方程式3では、reは、古典電子半径であり、meは電子質量であり、ηwater及びIwaterは、それぞれ水の電子密度及び平均イオン化ポテンシャルであり、βは光の速度cに対する陽子の速度である。
【0091】
幾つかの実施態様では、画像ベクトルxは、反復再構成技法を利用することによって解くことができるか、又は推定することができる。説明のために、集合Iが、I={1,2,...,m}であるような、m個の指数を有すると仮定し、集合{Hi:iはIの要素}が、n次元実数座標空間Rn内の超平面の有限族であるとする。反復プロセス中にベクトルxkが投影される集合Hiは、
【0092】
【数5】
【0093】
であるような、m×n線形系Ax=bのi番目の行によって規定することができる。方程式4では、aiは、AT(Aの転置)のi番目の列ベクトルであり、それにより、その成分は、Aのi番目の行を占める。
【0094】
幾つかの実施態様では、方程式4のi番目の超平面Hiを満たすオブジェクト関数Siは、コスト又はメリット関数
【0095】
【数6】
【0096】
がゼロ以下である制約を有する、x(Rnの要素(複数の場合もあり))の集合として表すことができる。ここで、εiは、超スラブの半値幅を規定する閾値パラメータである。全体のオブジェクト関数Sは、その後、S=∩Si(i=1〜m)であるようなm個のSi関数の交差として求めることができる。
【0097】
陽子エネルギー測定が実質的に雑音なしであり、かつ、MLPが実質的に正確である理想的な状況では、こうしたオブジェクト関数Sは、超平面の全てが交差する単一点として表すことができる。こうした理想的な状況が図20Aに示され、図20Aでは、例示的な超平面600が、「X」として示す点で交差することが示される。こうした理想的な状況では、閾値パラメータεiは、実質的にゼロとすることができ、<ai,x>=bi(gi(x)=0)である実質的に正確な解を得ることができる。
【0098】
より現実的な状況では、陽子エネルギー測定は、雑音なしの状態ではなく、かつ、MLPは正確でない。こうした状況では、超平面は、平面の代わりに、スラブとして示され、それにより、こうした超スラブの交差は、超スラブが全てオーバーラップする領域をもたらすことができる。こうした状況は図20Bに示され、図20Bでは、例示的な超スラブ610が、「Q」として示す領域で交差することが示される。こうした状況では、閾値パラメータεiは、ゼロより大きく、かつ、方程式5のメリット関数を満たす許容可能な解の外側境界を規定する量とすることができる。
【0099】
図20Bの例では、撮像される媒体を特徴付ける所望のオブジェクト関数Sは、オーバーラップ領域Q内に存在することができる。より一般的には、撮像される媒体を特徴付ける所望のオブジェクト関数Sは、制約された空間ε={εi}内に存在することができる。
【0100】
幾つかの実施態様では、こうした所望のオブジェクト関数は、最小化等の最適化技法によって得ることができる。最適化は、一部の撮像アプリケーションで一定の利点を有し得るが、欠点も有し得る。例えば、メリット関数によって決定される最適解は、必ずしも対象となる真のオブジェクトデータを最も良く再現する解ではない場合がある。こうした作用は、例えば、採集されたデータの不整合性及び/又はメリット関数の選択によって生じる可能性がある。さらに、メリット関数のこうした選択は、不適切であることがある引数によって、及び/又は、結果として得られる最適化問題を計算的に処理できること若しくはできないことによって影響を受ける可能性がある。幾つかの実施態様では、最適化手法は、メモリ及び処理パワー等の計算処理リソースの制限によって非実用的である可能性もある。
【0101】
幾つかの実施態様では、陽子CT画像再構成は、実行可能性探求法のうちの1つ又は複数を利用して実施することができる。凸集合の有限族の交差(例えば、図20Bの超スラブ610の集合から得られる例示的な交差領域Q)をもたらす撮像状況の場合、複数の解が存在し得る。凸実行可能性問題(CFP)法では、こうした複数の解の中の解が探索されて得られ、こうした解が、交差領域内の点に対応することができる。
【0102】
CFP法に基づく画像再構成(例えば、pCT再構成)の場合、所望の性能は、効率的な実行可能性探求投影法の使用、及び、所与のメリット関数の減少した値を有する実行可能解の発見等の因子に基づくことができる。幾つかの実施態様では、優秀化(superiorization)は、対応するCFP集合の実行可能解でもある、或るメリット関数に関する優れた解を発見するプロセスを指すことができる。優れた解は、1がそれに対して優れているメリット関数の値が(the value of the merit function, with respect to which one superiorizes)、優秀化プロセスが適用されていない場合に達するであろう実行可能点で、この関数の値より小さい(必ずしも最小ではないが)、CFPの実行可能解とすることができる。
【0103】
幾つかの実施態様では、効率的な実行可能性探求能力を提供する上記の投影方法は、制限がある摂動弾力性(perturbation resilience)を含む1つ又は複数の因子に基づいて選択することができる。実行可能点への収束性を失うことなく、所与の投影アルゴリズムに摂動を与えることができることは、メリット関数に関して、摂動なしの状態で到達するであろう別の実行可能点より優れている実行可能点に向かってのアルゴリズムの操向を可能にすることができる。
【0104】
いかなる特定の理論によって拘束されることを所望することも意図することもなく、アルゴリズムPは、以下が満たされる場合、制限がある摂動に対して弾力性があると言うことができる。シーケンス
【0105】
【数7】
【0106】
(xから始めて、Pの順次的な反復適用によって得られる)が、n次元実数座標空間Rn内の全てのxについて問題Qの解に収束する場合、Rn内の点の任意のシーケンス
【0107】
【数8】
【0108】
も、Qの解に収束する。ただし、全てのk≧0について、
【0109】
【数9】
【0110】
であるときに限る。ここで、βkvkは、制限がある摂動であり、βkが、
【0111】
【数10】
【0112】
であるような非負の実数であり、ベクトルのシーケンス
【0113】
【数11】
【0114】
が制限されることを意味する。
【0115】
幾つかの実施態様では、優秀化方法は、次のように利用することができる。制約型最小化問題を解こうとする代わりに、優秀化手法は、幾つかの実行可能探求アルゴリズムに摂動を与え得るため、実行可能性に対するその収束性を失うことなく、減少した目的関数値(複数の場合もあり)を有する1つの点(又は複数の点)が得られることになる。そのため、幾つかの実施態様では、pCT撮像のための1つ又は複数の実行可能探求投影アルゴリズムは、こうした摂動弾力性特性を含むことができるか、又は含むように適合することができる。こうした能力を含むように適合することができるこうした1つ又は複数の摂動弾力性投影アルゴリズムの非制限的な例は、本明細書でより詳細に述べられる。
【0116】
出願人は、優秀化方法のために利用することができる複数の投影アルゴリズムを解析し、こうした解析の幾つかの結果が図21〜図23を参照して述べられる。図21A及び図21Bは、例示的な投影アルゴリズムART(650)、BIP(652)、SAP(654)、OSART(656)、BICAV(658)、DROP(660)、及びCARP(662)を使用した、シミュレートされたGEANT4陽子相互作用の再構成についての性能曲線(例えば、反復サイクル数の関数としての相対誤差)を示す。図22は、陽子相互作用のシミュレーションで使用されたファントムの画像(上の行の第1列)、及び上記の投影アルゴリズムを使用した再構成画像を示す。図23は、例示的な投影アルゴリズム(DROP)の異なる数の反復によって得られた画像の比較を示し、幾つかの状況では、或る点を超える更なる反復は、必ずしも画像品質を大幅に上げないことを示す。
【0117】
図21〜図23の例示的な性能関連プロット及び性能関連画像は、既知の最適化技法を使用して得られた。これらの例示的な性能関連図に対する更なる参照が、例示的な投影アルゴリズムの説明においてなされる。
【0118】
幾つかの実施態様では、摂動弾力性投影アルゴリズムは、当業者に知られている、ART(代数再構成技法)等の順次投影アルゴリズムとすることができる。陽子CT再構成に適用されるARTアルゴリズムは、その順次的性質により遅い可能性がある。ARTアルゴリズムに関する更なる詳細は、例えば、G.T.Herman「Fundamentals of Computerized Tomography: Image Reconstruction from Projections」(2nded., Springer, New York, NY, 2009)において見出すことができる。図21A及び図22では、例示的なGEANT4シミュレーションに適用されるART投影アルゴリズムは、曲線650及び上の行の第2列の画像として示される。
【0119】
幾つかの実施態様では、ARTアルゴリズムは、同時ART(SART)アルゴリズムとして修正することができる。幾つかの実施態様では、SARTアルゴリズム等のARTベースのアルゴリズムは、ブロック反復アルゴリズム(例えば、ブロック反復SART又はOS−SART)として修正することができる。陽子CT再構成に適用されるSARTアルゴリズムは、最小2乗の最小に収束するように構成することができる。しかし、アルゴリズムは、重み付け値(1/m)が比較的小さいため、依然として遅い可能性がある。ここで、量mは、データ集合内の陽子の数を表す。図21B及び図22では、例示的なGEANT4シミュレーションに適用されるようなOS−ART投影アルゴリズムが、曲線656及び下の行の第1列の画像として示される。
【0120】
幾つかの実施態様では、摂動弾力性投影アルゴリズムは、ブロック反復投影(block-iterative projection)(BIP)アルゴリズムとすることができる。こうしたアルゴリズムは、Aharoni及びCensorによって開発され、このアルゴリズムに関する更なる詳細は、例えば、R.Aharoni及びY.Censor「Block-iterative projection methods for parallel computation of solutions to convex feasibility problems」(Linear Algebra and its Applications, 120, 165-175(1989))に見出すことができる。BIPアルゴリズムの幾つかの実施態様では、同時投影は、超平面の各ブロック内で行うことができ、超平面の複数のこうしたブロックは、順次に反復的に処理することができる。幾つかの実施態様では、BIPアルゴリズムは、ブロックサイズ(複数の場合もあり)に応じて重み付けを提供するように構成することができ、それにより、1/n重み付け値に関連する再構成が遅いという問題が回避される。図21A及び図22では、例示的なGEANT4シミュレーションに適用されるようなBIP投影アルゴリズムが、曲線652及び上の行の第3列の画像として示される。
【0121】
幾つかの実施態様では、摂動弾力性投影アルゴリズムは、ストリング平均化投影(string-averaging projection)(SAP)アルゴリズムとすることができる。こうしたアルゴリズムは、Censor、Elfving及びHermanによって開発され、このアルゴリズムに関する更なる詳細は、例えばY.Censor、T.Elfving及びG.T.Herman「Averaging strings of sequential iterations for convex feasibility problems」(Inherently Parallel Algorithms in Feasibility and Optimization and Their Applications, Elsevier Science Publications, Amsterdam, The Netherlands, D. Butnariu, Y. Censor, and S. Reich (Ed),101-114 (2001))に見出すことができる。SAPアルゴリズムの幾つかの実施態様では、それぞれが超平面のストリングを有する複数のストリングを形成することができる。順次投影は、各ストリング内で実施することができ、こうした順次投影は、複数のストリングについて並列に実施することができる。こうした投影は、ストリングの全ての凸の組合せの反復として処理することができる。図21A及び図22では、例示的なGEANT4シミュレーションに適用されるようなSAP投影アルゴリズムが、曲線654及び上の行の第4列の画像として示される。
【0122】
幾つかの実施態様では、摂動弾力性投影アルゴリズムは、コンポーネント平均化(CAV)アルゴリズムとすることができる。こうしたアルゴリズムは、Censor、Gordon及びGordonによって開発され、このアルゴリズムに関する更なる詳細は、例えばY.Censor、D.Gordon及びR.Gordon「Component averaging: An efficient iterative parallel algorithm for large and sparse unstructured problems」(Parallel Computing, 27, 777-808 (2001))に見出すことができる。幾つかの実施態様では、CAVアルゴリズムは、実質的に完全に同時であるように構成することができ、1/n重み付け係数は、対角要素がj番目のボクセルを交差する陽子の数に等しい対角行列の族によって置換することができる。こうした構成によって、非直交投影を得ることができる。幾つかの実施態様では、CAVアルゴリズムは、ブロック反復CAV(BICAV)アルゴリズムとして動作するように修正することができる。幾つかの実施態様では、CAVアルゴリズムは、コンポーネント平均化行投影(component averaging row projection)(CARP)アルゴリズムとして動作するように修正することができる。図21B及び図22では、例示的なGEANT4シミュレーションに適用されるようなBICAV投影アルゴリズムが、曲線658及び下の行の第2列の画像として示される。図21B及び図22では、例示的なGEANT4シミュレーションに適用されるようなCARP投影アルゴリズムが、曲線662及び下の行の第4列の画像として示される。
【0123】
幾つかの実施態様では、摂動弾力性投影アルゴリズムは、対角緩和した直交緩和(DROP)アルゴリズムとすることができる。こうしたアルゴリズムは、Censor、Herman、Elfving、及びNikazadによって開発され、このアルゴリズムに関する更なる詳細は、例えばY.Censor、T.Elfving、G.T.Herman及びT.Nikazad「On diagonally-relaxed orthogonal projection methods」(SIAM Journal of Scientific Computing, 30, 473-504(2008))に見出すことができる。幾つかの実施態様では、DROPアルゴリズムは、実質的に完全に同時であるように構成することができ、重み付け手法は、CAVアルゴリズムの重み付け手法と同様とすることができる。しかし、結果として得られる投影は直交とすることができる。幾つかの実施態様では、DROPアルゴリズムは、ブロック反復DROP(BIDROP)アルゴリズムとして動作するように修正することができる。図21B及び図22では、例示的なGEANT4シミュレーションに適用されるようなDROP投影アルゴリズムが、曲線660及び下の行の第3列の画像として示される。
【0124】
幾つかの実施態様では、摂動弾力性投影アルゴリズムは、修正重み付けスキームを有する同時代数再構成技法(simultaneous algebraic reconstruction technique)(SART)アルゴリズムとすることができる。こうしたアルゴリズムは、Anderson及びKakによって開発され、このアルゴリズムに関する更なる詳細は、例えばA.H.Andersen及びA.C.Kak「Simultaneous algebraic reconstruction technique(SART): A superior implementation of the ART algorithm」(Ultrasonic Imaging, 6, 81-94 (1984))に見出すことができる。幾つかの実施態様では、こうしたアルゴリズムは、実質的に完全に同時であるように構成することができ、重み付けは、各行列の行の非ゼロ要素の和に対して1の量とすることができる。幾つかの実施態様では、こうしたアルゴリズムは、ブロック集合反復(OSART)アルゴリズムとして動作するように修正することができる。
【0125】
他の投影アルゴリズムも、本明細書で述べる例示的な総変動優秀化(total variation superiorization)方法がある状態で又はない状態で利用することができる。こうした投影アルゴリズムの例に関する更なる詳細は、(i)D.Butnariu、Y.Censor及びS.Reich (Editors)「Inherently Parallel Algorithms in Feasibility and Opimization and Their Applications」(Elsevier Science Publishers, Amsterdam, The Netherlands, 2001)、(ii)Y.Censor及びS.A.Zenios「Parallel Optimization: Theory, Algorithms, and Applications」(Oxford University Press, New York, NY, USA, 1997)、及び(iii)Y.Censor、W.Chen、P.L.Combettes、R.Davidi及びG.T.Herman「On the effectiveness of projection methods for convex feasibility problems with linear inequality constraints」(Technical Report, December 22, 2009(http://arxiv.org/abs/0912.4367のarXivで入手可能))等の文献に見出すことができる。
【0126】
本明細書で述べるように、優秀化手法は、或るメリット関数に関して優れた解を見出すプロセスを含むことができ、こうした優れた解は、摂動弾力性投影から得られる集合を含む、対応する凸実行可能性問題(convex feasibility problem)(CFP)集合の実行可能解でもある。幾つかの実施態様では、こうしたメリット関数は、優秀化を総変動優秀化(TVS)とすることができるような総変動(TV)関数を含むことができる。
【0127】
総変動優秀化技法を実証するために、出願人は、本明細書で述べるように、DROP投影アルゴリズム(BIDROP)のブロック反復バージョンを使用した。こうしたTVS技法はまた、本明細書で開示したアルゴリズムを含む他の投影アルゴリズムとともに実装することができることが理解されるであろう。
【0128】
例示的なBIDROPアルゴリズムは、超平面指数の集合Iを、I=I1∪I2∪...∪IMであるようなM個のブロックの和集合として分割することによって使用することができる。幾つかの実施態様では、M個のブロックは、固定ブロックとすることができる。本明細書で述べるように、BIDROPアルゴリズムは、コンポーネント依存の重み付けスキームを使用するブロック反復投影法の変形であるとみなすことができる。
【0129】
幾つかの実施態様では、BIDROPは、次のように構成することができる。初期化は、オブジェクトベクトルxの第1の要素x0の値を選択することを含むことができる。x0のこうした値は、任意とすることもできるし、例えば、フィルタ補正逆投影(FBP)法を使用して推定することもできる。
【0130】
幾つかの実施態様では、反復ステップは、所与のベクトル要素xkについて、
【0131】
【数12】
【0132】
である、次の反復xk+1の計算を含むことができる。方程式7では、対角行列Ut(k)は、
【0133】
【数13】
【0134】
として表すことができる。ここで、htjは、j番目のボクセルに交差するt番目のブロック内の陽子履歴の数であり、
【0135】
【数14】
【0136】
は、ユーザ選択の緩和パラメータのシーケンスである。本明細書で述べるTVS技法の例示的な実証では、λは、BIDROPに関する結果に基づいて約1.9の値に維持され、データは、図23に示すように、12ブロックに分割された。さらに、ブロックは、t(k)=k mod M+1であるような周期制御である制御シーケンス
【0137】
【数15】
【0138】
によるアルゴリズムによって取上げられる。例示的な陽子データ集合は、実質的に等しいサイズで、かつ、各投影角度から実質的に等しい数の陽子履歴を有する12個のブロックに分割された。
【0139】
幾つかの実施態様では、メリット関数φ及び/又は近接性関数Prは、優秀化再構成を操向するように選択することができる。実行可能性近接性関数は、測定された積分相対阻止能(RSP)値の残りと、現在の画像推定によって得られた値とを提供するように選択することができる。こうした実行可能性近接性チェックは、メリット関数φによって表される更なるタスクに関する優秀化が、測定データと一致しない解を操向しないことを確実にするために利用することができる。幾つかの実施態様では、測定データに対する現在の画像推定xkの実行可能性近接性は、
【0140】
【数16】
【0141】
として計算することができる。ここで、mは、対象となる集合内の陽子履歴の数である。
【0142】
幾つかの状況では、(制約の交差の)実行可能集合は空とすることができる。こうした状況でも、方程式8の近接性関数を低減することは、制約に低い程度に「違反する(violate)」ことがより少ない点をもたらし、したがって、たとえ近接性関数がゼロの値に達しない(また、或る状況では、達することができない可能性がある)場合でも、有用であり得る。
【0143】
幾つかの実施態様では、再構成プロセス中に低減され、かつ、再構成された画像推定の総変動に関連するメリット関数φは、
【0144】
【数17】
【0145】
として表すことができる。ここで、pkは、n次元画像ベクトルxkの2次元J×J表現である。
【0146】
幾つかの実施態様では、画像推定の低減した総変動に向かって画像推定の反復シーケンスを操向するための摂動ベクトルvを計算することができる。例えば、摂動ベクトルは、
【0147】
【数18】
【0148】
になるように、xkにおける総変動の正規化された劣勾配(subgradient)を負数にしたものとして計算することができる。幾つかの実施態様では、総変動の例示的な劣勾配(複数の場合もあり)は、P.L.Combettes及びJ.Luoによって著された文献、「An adaptive level set method for nondifferentiable constrained image recovery」(IEEE Trans. Image Process, 11, 1295-1304 (2002))に述べられている方法で計算することができる。上記の例示的な摂動ベクトルに関する更なる詳細は、例えば、D. Butnariu、R. Davidi、G. T. Herman及びI. G. Kazantsevによって著された文献、「Stable convergence behavior under summable perturbations of a class of projection methods for convex feasibility and optimization problems」(IEEE J. Sel. Top. Signal Process, 1, 540-547, (2007))に見出すことができる。
【0149】
例1
上記の例示的なDROPベースの優秀化技法は、複数の方法で実装することができる。第1の例では、続く反復プロシージャのための初期画像推定は、測定データからフィルタ補正逆投影(FBP)再構成を実施することによって取得することができる。こうしたFBPは、既知の超音波画像グリッドに実質的に整合するように、個々の陽子履歴をリビニングすることによって実行することができる。反復プロシージャの場合、DROP投影作用素は、データ集合の全てのブロックが処理されるまで、周期的に適用することができる。幾つかの実施態様では、データ集合内の実質的に全ての履歴を含む、本明細書で述べるオプションの実行可能性近接性計算をチェックすることができる。
【0150】
幾つかの実施態様では、上記の第1の例示的なDROPベースの総変動優秀化技法は、複数の方法でコード化することができる。例えば、こうしたコード化は、以下のようなアルゴリズムを含むことができる。
(1)k=0にセットする
(2)xk=xFBP初期FBP再構成、及びβk=1にセットする
(3)Nサイクルにわたって以下を繰り返す
(4) xkにおいてsをφの劣勾配にセットする
(5) ‖s‖>0である場合、vk=−s/‖s‖にセットする
(6) ‖s‖>0でない場合、vk=sにセットする
(7) continue=trueにセットする
(8) continueである間、以下を行う
(9) yk=xk+βkvkにセットする
(10) 方程式9によってメリット関数(総変動)を計算し、φ(yk)≦φ(xk)である場合、
(11) yk(方程式7)に投影作用素Pt(k)を順次にM回適用する
(12) M個全てのブロックからの履歴を使用して、方程式8によって実行可能性近接性を計算し、Pr(PMy)<Pr(xk)である場合、
(13) xk+1=PMyにセットする
(14) continue=falseにセットする
(15) Pr(PMy)<Pr(xk)でない場合、βk=βk/2にセットする
(16) φ(yk)≦φ(xk)でない場合、βk=βk/2にセットする
(17)k=k+1にセットする
幾つかの実施態様では、サイクルの数を表す量Nを、例えば10にセットすることができる。Nの他の値も使用することができる。
【0151】
例2
第2の例では、DROP投影作用素を、後続のブロックからの履歴によって実施されるオプションの実行可能性近接性チェックを継続する前に、所与のブロックに適用することができる。こうした手法は、各ブロックが、各投影角度から実質的に等しい数の履歴を含み、したがって、全体としてデータを表し得るときに利用することができる。第1の例と同様に、初期画像推定は、測定データからフィルタ補正逆投影(FBP)再構成を実施することによって取得することができる。
【0152】
幾つかの実施態様では、上記の第2の例示的なDROPベースの総変動優秀化技法は、複数の方法でコード化することができる。例えば、こうしたコード化は、以下のようなアルゴリズムを含むことができる。
(1)k=0にセットする
(2)xk=xFBP初期FBP再構成、及びβk=1にセットする
(3)Nサイクルにわたって以下を各ブロックについて繰り返す
(4) xkにおいてsをφの劣勾配にセットする
(5) ‖s‖>0である場合、vk=−s/‖s‖にセットする
(6) ‖s‖>0でない場合、vk=sにセットする
(7) continue=trueにセットする
(8) continueである間、以下を行う
(9) yk=xk+βkvkにセットする
(10) 方程式9によってメリット関数(総変動)を計算し、φ(yk)≦φ(xk)である場合、
(11) y(方程式7)に投影作用素Pt(k)を適用する
(12) 後続のブロックからの履歴を使用して、方程式8によって実行可能性近接性を計算し、Pr(Pt(k)y)<Pr(xk)である場合、
(13) xk+1=Pt(k)yにセットする
(14) continue=falseにセットする
(15) Pr(Pt(k)y)<Pr(xk)でない場合、βk=βk/2にセットする
(16) φ(yk)≦φ(xk)でない場合、βk=βk/2にセットする
(17)k=k+1にセットする
幾つかの実施態様では、サイクルの数を表す量Nを、例えば10にセットすることができる。Nの他の値も使用することができる。
【0153】
例3
第3の例では、第1の例の方法は、ステップ12の実行可能性近接性チェックが実施されないように修正することができる。こうした修正は、所与の実行可能性近接性チェックが計算的に煩雑である場合に望ましい場合がある。
【0154】
例4
第4の例では、第2の例の方法は、ステップ12の実行可能性近接性チェックが実施されないように修正することができる。こうした修正は、所与の実行可能性近接性チェックが計算的に煩雑である場合に望ましい場合がある。
【0155】
例5
第5の例では、限定はしないが、方程式9を含む総変動(TV)関数を利用することができる。幾つかの実施態様では、DROP投影技法に基づくことができる第5の例は、複数の方法でコード化することができる。例えば、こうしたコード化は、x0=選択された値、かつ、β0=1である場合に、初期化を行うことができることを含むことができる。xk及びβkが与えられる反復ステップの場合、xk+1及びβk+1は、以下のように生成することができる。
(1)ブロック指数tを通してループする
(2)摂動ベクトルvkを計算する
(3)zk=xk+βkvkにセットする
(4)TV(zk)>TV(xk)である場合、βk=βk/2にセットして(2)へ進み、TV(zk)>TV(xk)でない場合、(5)へ進む
(5)方程式7と同様のDROPアルゴリズムによって、現在のブロック内で、超平面上へのzkの投影を計算する
(6)Res(yk)>Res(xk)である場合、βk=βk/2にセットして(2)へ進み、Res(yk)>Res(xk)でない場合、(7)へ進む
(7)xk+1=ykにセットし、停止条件が適用されるまで、(1)〜(6)を繰返す
幾つかの撮像状況では、計算処理リソース(例えば、計算パワー及び計算時間)を犠牲にしてオブジェクトの高品質画像を得ることが可能である。意図する用途にとって十分な品質を有し、リソースの許容可能な量を使用する画像を取得することが一般に望ましい。本開示の1つ又は複数の特徴が、陽子CTアプリケーションに適用されると、こうした望ましい品質及び/又は性能の利点を提供することができると考えられている。
【0156】
図24は、幾つかの実施態様において、プロセス700を、所望の品質及び/又は再構成性能特徴を有する陽子CT画像の形成を可能にする解を見出すために実施することができることを示す。ブロック702において、オブジェクトを通過した複数の陽子が検出することができる。こうした陽子検出の例(例えば、追跡及びエネルギー損失測定)が本明細書で述べられる。ブロック704において、オブジェクトを通って各陽子がとる経路を、オブジェクト内での陽子の相互作用を特徴付けるために推定することができる。こうした経路推定の例が本明細書で述べられる。ブロック706において、陽子の相互作用履歴を、実行可能解の凸集合に変換することができる。こうした変換の例が本明細書で述べられる。ブロック708において、凸集合内にある解を、変換に関連するメリット関数に基づいて見出すことができ、その解は、少なくとも1つの選択された推定又は既存の解より優れている。こうした優秀化方法の例が本明細書で述べられる。
【0157】
図25は、幾つかの実施態様において、例えば図24のプロセス700によって得られた優れた解に基づいて画像を得るためにプロセス710を実施することができることを示す。ブロック712において、凸実行可能性集合からの優れた解を得ることができ、ここで、凸実行可能性集合は、複数の陽子のそれぞれと、撮像されるオブジェクトとの相互作用を特徴付ける。ブロック714において、オブジェクトは、ブロック712で得られた優れた解に基づいて特徴付けすることができる。例えば、所望のボクセル値を有するベクトルは、優れた解から計算することができる。ブロック716において、オブジェクトの画像は、オブジェクトの特徴付けに基づいて形成することができる。
【0158】
図26A及び図26Bは、GEANT4によってシミュレートされた例示的な陽子相互作用構成800を示し、図27〜図29は、本明細書で述べる再構成方法から得られる例示的な結果を示す。
【0159】
例示的なシミュレーション構成800では、検出器システムは、上流追跡検出器804及び下流追跡検出器806を含む。上流検出器804及び下流検出器806のそれぞれは、個々の陽子の入射及び出射の場所及び方向の確定を可能にするために2つの追跡平面を含む。各追跡平面は、約30cm×30cmの寸法と、約0.04cmの厚さと、約100μmの割り当てられた空間分解能とを有する2D感応性シリコン追跡平面として構成される。
【0160】
シミュレーション構成800の検出器システムは、約32cm×32cmの横方向寸法と約10cmの厚さとを有するCsI結晶熱量計808を更に含む。熱量計808の応答をシミュレートするために、検出器の雑音源が無視され、検出器は、完全なエネルギー分解能を有するものとして構成された。
【0161】
例示的なシミュレーション構成800では、2つの異なる仮想ファントム810が、空間分解能及び相対阻止能分解能を定量化するために使用された。その断面図が図26Bに示される両方のファントムは、約16cmの直径を有する。各ファントムは、国際放射線防護委員会(ICRP)によって規定されたような、化学組成及び電子密度が脳812及び頭骸骨814に実質的に同等な2つの物質を含む。
【0162】
図26Bでは、第1の例示的なファントム810aは、選択された再構成ボクセル寸法にほぼ等しい、約(0.82×0.82)mm2の断面を有する、中心長方形プリズム構造816を含む。こうしたファントムは、所与の再構成方法の空間分解能の推定を可能にすることができる。第2の例示的なファントム810bは、こうした中心構造を含まない。例示的なシミュレーションのために、中心構造816の電子密度は、周囲の脳物質の電子密度より約20倍大きいが、同じ化学組成を保持するように選択された。
【0163】
図26Aに示すように、約200MeVのエネルギーを有する実質的に単一エネルギーの陽子は、2D平行ビーム幾何形状を形成した。約2度間隔を有する180回の投影が、各ファントムについてシミュレートされた。各投影角度について、追跡平面上の位置及び熱量計に付与されたエネルギーが、20000個の陽子について記録された。
【0164】
陽子とファントムとの相互作用をシミュレートするために、GEANT4ハドロンイオン化モデルが使用された。モデルは、ファントムを横切る陽子について対象となるエネルギー範囲をカバーする、約2MeVを超える陽子エネルギーについてベーテブロッホ(Bethe-Block)関係を使用した。イオン化エネルギー損失について、GEANT4構成は、1keV〜100TeVの運動エネルギーにおいて対数的に等間隔で配置された100ステップにおける平均値の計算を含む。しかし、こうしたデフォルト構成は、陽子CTアプリケーションにとって十分に正確でない場合があることを調査が示した。したがって、エネルギービニングが、2000ステップにおいて1keV〜500MeVまで計算された。GEANT4における低エネルギー弾性核衝突モデル及び低エネルギー非弾性核衝突モデルが使用可能にされた。
【0165】
シミュレートされた陽子データ(入口座標及び出口座標並びに熱量計に付与されたエネルギーを含む)に基づいて、各ファントムの2D画像が、種々のDROPベースの投影アルゴリズムによって、また、優秀化方法がある状態及びない状態で再構成された。所与のブロック内の投影等の計算(例えば、他のブロックと独立であり得る方程式7の加算)の並列実行を実施するために、GPGPU(汎用グラフィカル処理ユニット)が使用された。所与のGPGPU上でのブロック投影の完了に続いて、更なる処理のために、加算されたアレイが、プロセッサ(例えば、CPU)に戻された。CPUはまた、ブロック反復アルゴリズムの順次部分を実施した。
【0166】
上記の方法で得られた画像は、以下のように更に解析された。再構成画像の空間分解能は、空間周波数の関数として撮像システムの信号伝達特性の尺度を提供することができる2D変調伝達関数(MTF)によって定量化された。こうした尺度について、中心にある密な長方形プリズム(図26Bの816)の画像の点拡がり関数(point spread function)(PSF)が使用された。再構成に続いて、PSFを中心とする16×16の2Dボクセルの関心領域の2D高速フーリエ変換(FTT)が実行された。ファントムの軸対称性を利用して、MTFは、画像の、結果として得られる空間周波数表現のx軸成分及びy軸成分の大きさを平均することによって、関心領域において得られた。
【0167】
低コントラスト密度分解能は、所与のサイズのオブジェクトを周囲組織から識別するのに必要とされる最小コントラストを確定するためのオブジェクト統計解析法を提供することができるコントラスト識別関数(CDF)によって評価された。CDFは、一様なファントム(図26Bの810b)の再構成画像を、サイズが1×1〜10×10の2Dボクセルの範囲のオブジェクトのグリッドに分割することによって計算された。グリッド要素内の平均ピクセル値の分布の標準偏差は、所与の信頼レベルで検出可能な最小コントラストを確定するために使用された。95%の信頼レベルの場合、選択されたグリッドサイズのオブジェクトと背景との間の検出可能な密度差は、平均ピクセル値分布の3.29標準偏差として規定された。
【0168】
再構成された相対阻止能(RSP)値の量的精度は、ヒストグラム解析を使用し、相対的RSP誤差を
【0169】
【数19】
【0170】
として規定して、確定された。ここで、x’jは、ファントムのボクセルj内のRSPであり、xnjは、nサイクル後のボクセルj内の再構成されたRSPである。
【0171】
図27は、(a)総変動優秀化なしのDROPと、(b)TVSを用いるが、(第3の例としても述べられる)第1の例における実行可能性近接性チェックがない状態のDROP(TVS1−DROP*)と、(c)TVSを用いるが、(第4の例としても述べられる)第2の例における実行可能性近接性チェックがない状態のDROP(TVS2−DROP*)とによって再構成された画像を示す。上の行の画像は、一様なファントム(図26Bの810b)の再構成であり、下の行の画像は、空間分解能ファントム(図26Aの810a)の再構成である。例示的な画像は、0.8と1.2との間にRSP値を含むように切断したRSP窓から得られる。
【0172】
図28A〜図28Cに示す種々の例示的な結果において、実行可能性近接性チェックを用いるDROPベースのTVS法は、「*」シンボルなしで示される。
【0173】
上記の方法を用い、かつ、実行可能性近接性チェックなしで再構成された画像は、実行可能性近接性チェックを用いて再構成された画像と比較すると、より小さいか又はほぼ同等な最小相対誤差を有していた。こうした作用が図28Aに示される。DROPベースのTVS法は全て、実行可能性近接性チェックを用いても用いなくても、少なくとも10まで延びる反復サイクル数範囲について、TVSなしのDROP(DROP-without-TVS)法より小さな相対誤差を有する。図27に示す画像は、TVSなしのDROPの場合、サイクル3であり、TVS1−DROP*及びTVS2−DROP*の場合、サイクル10である、最小相対誤差の各サイクルにおいて得られた画像に対応することが留意されるべきである。定性的には、TVS2−DROP*スキームが、おそらく余分の摂動ステップのために、最も低い雑音レベルを有したことがわかる。
【0174】
図28Aは、種々のスキームについてのサイクル数の関数としての相対誤差のプロットを示す。プロットにおいて、サイクル0の相対誤差は、反復TV優秀化の初期点を生成するのに使用されたFBPアルゴリズムによって生成される相対誤差に対応する。
【0175】
TVS1−DROP及びTVS1−DROP*スキーム(実行可能性近接性チェックを用いた状態及び用いない状態)によって再構成された画像は、一般に、定量的な相対阻止能(RSP)精度の点で同等であり、相対誤差は、サイクル数が増加するにつれて、単調減少傾向に従う。実行可能性近接性チェックの排除は、この場合チェック条件が違反されないため、大きな差を生じない。
【0176】
一方、実行可能性近接性チェックの排除は、TVS2−DROPスキームの場合、大きな差を生じる。図28Aは、実行可能性近接性チェックを含むことが、DROPアルゴリズムと同様の、最小に達した後の相対誤差の漸進的な増加をもたらし得ることを実証する。こうした作用は、減少したβが、摂動ステップの雑音低減効果を弱め得ることによって説明することができる。したがって、DROPアルゴリズムが低い相対誤差から離れるため、より厳格なTVS手法も低い相対誤差から離れる。これは、TVS2−DROPに関しては起こるが、TVS1−DROPに関しては起こらない。その理由は、実行可能性近接性条件の違反が、前者に関しては観測されるが、後者に関しては観測されないからである。実行可能性近接性チェックがない状態では、TVS2−DROP*スキームの相対誤差は、10サイクル内で単調減少傾向に従う。最初の10サイクル内での最小相対誤差は、DROPに関して約2.64%、TVS1−DROP及びTVS1−DROP*に関して約1.96%、TVS2−DROPに関して約1.64%、及びTVS2−DROP*に関して約1.55%である。これらの差は、異なるスキームによって再構成された画像内の様々な程度の雑音から生じ得る。
【0177】
上記の例示的な結果は、12ブロックに細分されたデータによって得られた。結果の別の集合は、180ブロックに細分されたデータによって得られ、その結果(図示せず)は、12ブロックの結果に非常に似ていた。したがって、幾つかの実施態様では、総変動優秀化方法によって処理されたブロック反復再構成アルゴリズムは、ブロックの数の或る変化により、実質的に影響されないことができる。
【0178】
図27の上の行に提示されている画像のヒストグラムは、脳及び骨等価領域の平均再構成値を解析するために生成された。再構成雑音をモデル化するために、ガウス分布がピークに当てはめられた。全てのスキームは、ピーク当てはめ不確実性内で、脳及び骨等価領域について実質的に同じ平均RSP値を再構成した。したがって、TVS摂動スキームは、これらの物質の再構成値の精度に悪い影響を及ぼさなかった。
【0179】
TVS1−DROP*及びTVS2−DROP*スキーム(ともに、雑音性能を改善し、再構成時間を低減した)を使用した更なる解析によって、図28Bに示すMTFプロットを得た。プロット内の任意の空間周波数について、TVS1−DROP*スキームはより大きなMTF値、したがって、DROPスキームの空間分解能に比べて、優れた空間分解能を有する。TVS1−DROP*及びTVS2−DROP*スキームは、空間分解能の点で同様に機能するが、TVS1−DROP*スキームが僅かに良好である。TVS再構成スキームに関する空間分解能の改善は、最低の相対誤差に達する前に実施されるサイクル数がより多いことに起因し得る。反復アルゴリズムとともにMLP形式を使用すると、pCT空間分解能がサイクル数とともに改善することが過去に観測されている。これは、密度分解能を改善する一部の再構成法(図28Cを参照して本明細書で述べる)が、劣った空間分解能を表示することが多いため、重要な結果であり得る。
【0180】
DROP及び低減型(reduced)TVS−DROP*スキームに関連するCDFは、図28Cにプロットされる。TVS1−DROP*スキームは、DROPスキームよりほんの僅かだけ良好に機能するが、TVS2−DROP*スキームは、他の2つのスキームよりはるかに良好に機能する。約1mm2程度の小さいオブジェクトの場合、TVS2−DROP*スキームは、約1%と約1.5%との間のコントラスト識別を可能にする。TVS2−DROP*スキームの優れたコントラスト識別は、画像雑音の低減と空間分解能の改善の組合せに起因し得る。
【0181】
図29は、幾つかの実施態様において、総変動優秀化方法等の優秀化スキームが、相対阻止能(RSP)の測定の改善ももたらすことができることを示す。図29の例示的なプロットは、ファントムに関連する、既知の急峻な阻止能ピーク(実線)並びにDROP法(「x」マーク)及びTVS−DROP法(固体充填マーク)(例えば、本明細書で述べる第5の例)を使用した、シミュレートされたデータの再構成から得られた阻止能ピークを示す。DROPの例についてのRSP分布は、図19Bを参照して述べた例(例えば、有効平均コード長技法)の最良のものと同様の性能を有する。こうしたDROP再構成法にTVS技法を実装することによって、結果として得られるRSPの分布は、実際のRSP分布をかなり良く複製することが示される。
【0182】
図30は、実験陽子データに適用されたTVS−DROP再構成スキームを使用して得られた例示的な陽子CT画像を示す。画像は、空気(左上)、アクリル(右上、約1.2の相対阻止能)及び骨等価プラスチック(右下、約1.7の相対阻止能)の挿入物を有するポリスチレン(約1.035の相対阻止能)で作られた球ファントムの2mmスライス再構成に対応する。異なる阻止能の物質をはっきりと識別することができることがわかる。
【0183】
本明細書で述べるように、優秀化スキームは、手近の撮像タスクに適合するようにpCT再構成に適用することができる。幾つかの実施態様では、pCT又は他の反復画像再構成方法に適用される優秀化方法は、実行可能性探求投影方法の反復ステップの間で、計算された画像推定に摂動を与えることによって容易にすることができる。摂動方法を適切に選択することによって、再構成画像のシーケンスに対する、著しく有利な変更を達成することができる。
【0184】
本明細書で述べるように、総変動の低減に基づく、TVS1−DROP及びTVS2−DROP等の例示的な優秀化スキームは、DROP法に比べて改善された画像品質をもたらすことができる。より具体的には、TVS2−DROPにおいて利用される更なる摂動ステップは、画像雑音のより大きな低減及び優れた密度分解能をもたらすことができる。
【0185】
幾つかの実施態様では、総変動優秀化方法の1つ又は複数の特徴に関連する計算時間は、提供される利益の観点で考慮することができる。例えば、TVメリット関数(例えば、方程式9)及び摂動ベクトルvkの計算は、画像の寸法が比較的大きいとき、画像再構成時間を増加させ得る。別の例では、再構成時間は、実行可能性近接性関数(例えば、方程式8)の計算によって著しく増加し得る。したがって、幾つかの実施態様では、TVSスキームは、実行可能性近接性関数の省略によって減少した時間(例えば、約半分の時間)で実施することができる。TVS2−DROPスキーム等の幾つかの実施態様では、画像雑音の低減を更にもたらす省略を行うことができる。TVS1−DROPスキーム等の幾つかの実施態様では、省略は、他の性能パラメータに対して実質的に全く有害な影響を及ぼさない可能性がある。
【0186】
幾つかの実施態様において、空間分解能の改善は、両方のTVS促進性再構成スキームによって達成することができることも留意される。本明細書で述べる例示的なTVS1−DROP*スキームは、TVS2−DROP*スキームに比べて僅かに優れた空間分解能を示す一方、TVS2−DROP*スキームは、そのより良好な雑音低減にもかかわらず、DROP再構成によって再構成された画像に比べて優れた空間分解能を依然としてもたらす。再構成画像を「平滑化する(smoothing)」ことによって密度分解能を改善しようとする以前の試みは、概して、空間分解能の低下をもたらしたことが注目されてきた。これは、例示的なTVS1−DROP及びTVS2−DROPのスキームでは当てはまらず、ここでは、空間分解能は維持又は改善された。
【0187】
本明細書で述べるように、本開示の1つ又は複数の特徴は、画像等の有用な結果を得るために、陽子CTデータの効果的かつ比較的高速な再構成を容易にすることができる。こうした有利な特徴は、こうした有用な結果を得るために必要とされる放射線線量を低減するためにも利用することができる。例えば、また、図5及び図6を参照すると、CTに利用される陽子は、平均して、ブラッグピークが、撮像されるオブジェクトの下流の場所で起こるように構成することができる。したがって、オブジェクトは、陽子の放射線線量のかなりの部分を受けることを免れる。
【0188】
オブジェクトが受けることを予想され得る(ブラッグピークエネルギー損失がない)線量は、以下のように概略で推定することができる。撮像されるオブジェクトがボクセルに分割され、各ボクセルが1mm3立方体であり、スライス画像を得るために陽子投影が(図26の例示的なシミュレーションと同様の)180の向きで得られると仮定する。概略推定のために、オブジェクトが、250MeVの陽子についてのエネルギー損失が約100MeVであるような水によって表すことができる通常の頭部サイズのオブジェクトであるとも仮定する。このとき、こうしたスライスについて陽子当たりの線量は、約0.5nGyであると推定することができる。
【0189】
上記のスライスを表すベクトルの寸法は、1mm3立方体の例示的なボクセルサイズを仮定して、1802=3.6×104として推定することができる。各ボクセルは、少なくとも1つの陽子によって横切られると仮定する。このとき、こうしたスライスをカバーするのに必要とされることが予想され得る陽子の数は、ベクトル寸法の大きさ程度のものであると推定することができる。したがって、所与のスライスが受けることが予想され得る線量は、(3.6×104)陽子×0.5nGy/陽子=1.8×104nGy又は約20μGy(又は、250MeV範囲内の陽子は一般に低LET放射線であるため、約20μSv)として推定することができる。こうした放射線量は、比較的低く、状況によっては、極度に低いとさえ考えられ得る。
【0190】
本開示の1つ又は複数の特徴に関する更なる詳細は、S.N.Penfold、R.W.Schulte、Y.Censor、A.B.Rosenfeldによる文献「Total variation superiorization schemes in proton computed tomography image reconstruction」(Med. Phys. 37(11), November 2010)に見出すことができる。この文献は、参照によりその全体が本明細書に援用される。
【0191】
本明細書で述べる種々の例示的なプロセス及びアルゴリズムは、電子ハードウェア、コンピュータソフトウェア、又は両方の組合せとして実装することができる。種々のプロセス及びアルゴリズムを実装するために使用されるハードウェア及びデータ処理装置は、汎用のシングルチッププロセッサ若しくはマルチチッププロセッサ、デジタル信号プロセッサ(DSP)、汎用グラフィック処理ユニット(GPGPU)、特定用途向け集積回路(ASIC)、フィールドプログラマブルゲートアレイ(FPGA)若しくは他のプログラマブルロジックデバイス、ディスクリートゲート若しくはトランジスタロジック、ディスクリートハードウェアコンポーネント、又は、本明細書で述べた機能を実施するように設計されたそれらの任意の組合せによって実装又は実施することができる。プロセッサは、マイクロプロセッサ、又は任意の従来のプロセッサ、コントローラ、マイクロコントローラ、又はステート・マシンとすることができる。プロセッサはまた、コンピューティングデバイスの組合せ、例えば、DSPとマイクロプロセッサとの組合せ、複数のマイクロプロセッサ、DSPコアと連携する1つ若しくは複数のマイクロプロセッサ、又は、任意の他のこうした構成として実装することができる。幾つかの実施態様では、特定のステップ及び方法は、所与の機能に固有である回路要素によって実施することができる。
【0192】
本明細書で述べる種々の機能は、ハードウェア、デジタル電子回路要素、コンピュータソフトウェア、ファームウェアにおいて、又はそれらの任意の組合せにおいて実装することができる。本明細書で述べる再構成スキームの実施態様は、1つ又は複数のコンピュータプログラム(例えば、データ処理装置が実行するため、又は、データ処理装置の動作を制御するために、コンピュータ記憶媒体上に符号化されるコンピュータプログラム命令の1つ又は複数のモジュール)として実装することができる。
【0193】
ソフトウェアにおいて実装される場合、機能は、コンピュータ可読媒体上の1つ又は複数の命令又はコードとして記憶又は伝送することができる。本明細書で開示される方法又はアルゴリズムのステップは、コンピュータ可読媒体上に存在することができるプロセッサ実行可能ソフトウェアモジュールに実装することができる。コンピュータ可読媒体は、コンピュータプログラムを1つの場所から別の場所へ転送できるようにすることができる任意の媒体を含む、コンピュータ記憶媒体及び通信媒体の両方を含むことができる。記憶媒体は、コンピュータがアクセスすることができる任意の入手可能な媒体とすることができる。制限としてではなく例として、こうしたコンピュータ可読媒体は、RAM、ROM、EEPROM、CD−ROM若しくは他の光学ディスク記憶装置、磁気ディスク記憶装置若しくは他の磁気記憶デバイス、又は、命令若しくはデータ構造の形態で所望のプログラムコードを記憶するために使用されることができ、コンピュータによってアクセスすることができる任意の他の媒体を含むことができる。同様に、任意の接続を、コンピュータ可読媒体と適切に呼ぶことができる。本明細書で使用されるディスク(disk)及びディスク(disc)は、コンパクトディスク(compact disc)(CD)、レーザディスク(laser disc)、光ディスク(optical disc)、デジタル多用途ディスク(digital versatile disc)(DVD)、フロッピーディスク(floppy disk)、及びブルーレイディスク(blu-ray disc)を含み、ディスク(disk)は通常、データを磁気的に再生する一方、ディスク(disc)は、データをレーザによって光学的に再生する。上記の組合せも、コンピュータ可読媒体の範囲内に含まれるべきである。さらに、方法又はアルゴリズムの動作は、コンピュータプログラム製品に組込むことができる、機械可読媒体及びコンピュータ可読媒体上のコード及び命令の1つ又は任意の組合せ又は集合として存在することができる。
【0194】
本明細書で使用される用語「約(approximately)」、「約(about)」、及び「実質的に(substantially)」は、依然として所望の機能を実施するか又は所望の結果を達成する、述べた量に近い量を表す。例えば、用語「約(approximately)」、「約(about)」、及び「実質的に(substantially)」は、述べた量の10%未満内、5%未満内、1%未満内、0.1%未満内、及び0.01%未満内である量を指すことができる。本明細書で使用される用語「の少なくとも一部分(at least a portion of)」は、全体の或る量を表し、この或る量は、全体を含むことができる全量を含む。例えば、用語「の一部分(a portion of)」は、全体の0.01%より多い、0.1%より多い、1%より多い、10%より多い、20%より多い、30%より多い、40%より多い、50%より多い、60%より多い、70%より多い、80%より多い、90%より多い、95%より多い、99%より多い、及び100%の量を指すことができる。
【0195】
文脈上別途明確に必要としない限り、明細書及び特許請求の範囲全体を通じて、語「備える、含む(comprise)」、「備える、含む(comprising)」、及び同様なものは、排他的意味又は網羅的意味と対照的に、包含的意味で、すなわち、「含むが、それに限定されない(including, but not limited to)」という意味で解釈されるものとする。本明細書で一般に使用される語「結合した(coupled)」は、直接接続されるか又は1つ若しくは複数の中間要素によって接続することができる2つ以上の要素を指す。さらに、語「本明細書で(herein)」、「上記(above)」、「以下(below)」、及び同様の意味の語は、本出願で使用されるとき、本出願を全体として指し、本出願のいかなる特定の部分も指さないものとする。文脈が許可する場合、単数又は複数を使用する上記詳細な説明内の語はまた、複数又は単数をそれぞれ含むことができる。語「又は、若しくは(or)」は、2つ以上のアイテムのリストを参照し(is in reference to)、その語は、語の以下の解釈、すなわち、リスト内のアイテムの任意のものと、リスト内のアイテムの全てと、リスト内のアイテムの任意の組合せとの全てを包含する。
【0196】
本発明の実施形態の上記で詳述された説明は、網羅的であることも、上記で開示された厳密な形態に本発明を限定することも意図しない。本発明の特定の実施形態及び例が例証のために上述されるが、当業者が認識するように、本発明の範囲内で種々の等価な修正が可能である。例えば、プロセス又はブロックは所与の順序で提示されるが、代替の実施形態は、異なる順序で、ステップを有するルーチンを実施することも、ブロックを有するシステムを使用することもでき、幾つかのプロセス又はブロックは、削除し、移動し、追加し、細分し、組み合わせ、かつ/又は修正することができる。これらのプロセス又はブロックのそれぞれは、種々の異なる方法で実装することができる。同様に、プロセス又はブロックは、時として直列に実施されるものとして示されるが、これらのプロセス又はブロックは、代わりに、並列に実施することも、異なる時点で実施することもできる。
【0197】
本明細書で提供される本発明の教示は、必ずしも上述したシステムではなく、他のシステムに適用することができる。上述した種々の実施形態の要素及び動作は、更なる実施形態を提供するために組み合わせることができる。
【0198】
本発明の或る特定の実施形態が述べられたが、これらの実施形態は、単に例として提示されており、本開示の範囲を制限することを意図されない。実際には、本明細書で述べる新規な方法及びシステムは、種々の他の形態で具現化することができ、さらに、本明細書で述べる方法及びシステムの形態における種々の省略、置換及び変更を、本開示の趣旨から逸脱することなく行うことができる。添付特許請求の範囲及びその均等物は、本開示の範囲及び趣旨内に入る形態又は修正形態を包含することを意図される。
【特許請求の範囲】
【請求項1】
コンピュータ断層撮影を実施するための方法であって、
オブジェクトを通過する複数の陽子について測定データを取得することであって、前記測定データは、前記陽子のそれぞれについて第1のトラック及び第2のトラックに関する情報を含み、該第1のトラック及び該第2のトラックは、それぞれ、前記陽子の、前記オブジェクトの通過の前及び後の該陽子の軌跡に対応し、前記測定データは、前記陽子の、前記オブジェクトの通過によって生じる各陽子の相互作用量に関する情報を更に含む、取得することと、
各陽子について、前記第1のトラック及び前記第2のトラックに少なくとも部分的に基づいて前記オブジェクト内で前記陽子がとる経路を推定することと、
前記陽子の、前記オブジェクトの通過が、連立方程式Ax=bとして表されるか又は表すことが可能であるように、前記陽子の前記相互作用量及び前記推定経路を配列することであって、ここで、xは、前記オブジェクトに関連するパラメータの分布であり、bは、前記オブジェクト内の前記陽子のそれぞれの経路に沿う相互作用から生じる該陽子の前記相互作用量を表し、Aは、bを得るためにxに作用する作用素であり、該作用素Aは、前記オブジェクト内の前記陽子の前記推定経路に関する情報を有し、前記連立方程式は、複数の解を有するように構成される、配列することと、
前記連立方程式について初期解を推定することと、
前記複数の解の中で1つ又は複数の実行可能解を探すことであって、各実行可能解は、既存の解に摂動を与えることによって得られ、前記既存の解の前記摂動なしで得られる別の解よりも、前記オブジェクトパラメータ分布の再構成に関連する量について優れた特性を有する、探すことと、
前記1つ又は複数の実行可能解のうちの選択された1つの解に基づいて前記オブジェクトパラメータ分布を計算することと、
を含む、コンピュータ断層撮影を実施するための方法。
【請求項2】
前記陽子の前記相互作用量は、前記陽子の、前記オブジェクトの通過によって生じる前記陽子のエネルギー損失を含む、請求項1に記載の方法。
【請求項3】
bは、前記陽子の前記推定経路に沿う前記相互作用量の積分値を表す、請求項1に記載の方法。
【請求項4】
前記連立方程式Ax=bは、連立一次方程式を含む、請求項1に記載の方法。
【請求項5】
前記作用素Aは行列を含む、請求項4に記載の方法。
【請求項6】
前記選択された実行可能解は、前記複数の解の中で最適解でない実行可能解を含む、請求項1に記載の方法。
【請求項7】
前記オブジェクトパラメータ分布を計算することは、3Dオブジェクトパラメータ分布を計算することを含む、請求項1に記載の方法。
【請求項8】
前記計算されたオブジェクトパラメータ分布に基づいて前記オブジェクトの断層画像のアレイを形成することを更に含む、請求項1に記載の方法。
【請求項9】
前記オブジェクトパラメータ分布は、電子密度ベース量の分布を含む、請求項1に記載の方法。
【請求項10】
前記電子密度ベース量は、実質的に一様な物質に対する相対的陽子阻止能を含む、請求項9に記載の方法。
【請求項11】
前記実質的に一様な物質は水を含む、請求項10に記載の方法。
【請求項12】
前記再構成されるオブジェクトパラメータ分布は、前記電子密度ベース量の3次元分布を含む、請求項9に記載の方法。
【請求項13】
前記経路を推定することは、前記陽子の最尤経路を推定することを含む、請求項1に記載の方法。
【請求項14】
前記オブジェクトパラメータ分布の再構成に関連する量は、前記再構成されたオブジェクトパラメータ分布の総変動を含む、請求項1に記載の方法。
【請求項15】
前記総変動の前記優れた特性は、前記総変動の、より低い値を含む、請求項14に記載の方法。
【請求項16】
前記再構成されたオブジェクトパラメータ分布の前記総変動は、pkで評価される関数
【数1】
の量を含み、ここで、pkは、相互作用パラメータ分布xのベクトル表現xkの2次元J×J表現である、請求項15に記載の方法。
【請求項17】
前記解に関連する前記総変動は、他の実行可能解に関連する総変動よりも優れている、請求項15に記載の方法。
【請求項18】
前記初期解を推定することは、フィルタリングされた逆投影再構成解を計算することを含む、請求項1に記載の方法。
【請求項19】
前記1つ又は複数の実行可能解を探すことは、
前記オブジェクトパラメータ分布xのベクトル表現xkに摂動を与えることであって、それによって、摂動付与済みベクトルykを得る、摂動を与えることと、
前記摂動付与済みベクトルykに関連する前記再構成されたオブジェクトパラメータ分布に関連する量を評価することと、
前記摂動付与済みベクトルykに関連する量が、前記未摂動ベクトルxkに関連する量より優れている場合、ykを投影することであって、それによって、次のベクトル表現xk+1を得る、ykを投影することと、
の反復を実施することを含む、請求項1に記載の方法。
【請求項20】
前記ベクトルxkに摂動を与えることは、yk=xk+βkvkとなるようにykを計算することを含み、ここで、βkは、摂動の大きさを表し、vkは、摂動ベクトルである、請求項19に記載の方法。
【請求項21】
前記摂動ベクトルvkは、xkにおける前記再構成されたオブジェクトパラメータ分布に関連する量の正規化された劣勾配を負数としたものとして計算される、請求項20に記載の方法。
【請求項22】
ykについて評価された量が、xkについて評価された量以下である場合、前記摂動付与済みベクトルykに関連する量は、前記未摂動ベクトルxkに関連する量に対して優れている、請求項19に記載の方法。
【請求項23】
前記投影することは、或る関連する凸集合上へのxkの数学的に規定された投影としてxk+1を計算することを含む、請求項19に記載の方法。
【請求項24】
前記投影することは、前記測定データが複数のブロックに分割されるように、ブロック反復投影アルゴリズムを使用して、超平面、半空間、超スラブ、又は他の凸集合上に投影することを含む、請求項23に記載の方法。
【請求項25】
前記投影することは、前記連立方程式の個々の超平面上への直交投影とともに、対角成分ごとの緩和を可能にするように構成された対角緩和した直交投影(DROP)ベースアルゴリズムを使用して投影することを含む、請求項24に記載の方法。
【請求項26】
DROPベースアルゴリズムは、対角緩和した直交行列λkUt(k)を含み、ここで、λkは、k番目の反復についての緩和パラメータであり、Ut(k)は、t番目のブロックについて対角要素min(1,1/htj)を有する対角行列であり、htjは、ベクトルxkのj番目のボクセルと交差するt番目のブロック内の陽子履歴の数である、請求項25に記載の方法。
【請求項27】
前記投影することは、次の反復に進む前に、前記ブロックが全て処理されるまで、前記ブロックを通して周期的に実施される、請求項24に記載の方法。
【請求項28】
反復は、処理される所与のブロックについて、前記投影することが該所与のブロックについてだけ実施されるように、各ブロックについて実施される、請求項24に記載の方法。
【請求項29】
前記反復を実施することは、実行可能性近接性チェックを計算することであって、前記再構成されたオブジェクトパラメータ分布に関連する量を評価するという更なるタスクに関する反復が、前記測定データとの所望の一致からはずれて前記解を操向しないことを検証する、計算することを更に含む、請求項19に記載の方法。
【請求項30】
陽子コンピュータ断層撮影を実施する方法であって、
オブジェクトを通過する複数の陽子について測定データを取得することと、
前記測定データに対する総変動優秀化に基づいて投影ベース再構成アルゴリズムを反復して適用することであって、前記オブジェクトの相対阻止能の分布を得る、適用することと、
を含む、陽子コンピュータ断層撮影を実施する方法。
【請求項31】
前記相対阻止能分布に基づいて前記オブジェクトの視覚画像を形成することを更に含む、請求項30に記載の方法。
【請求項32】
陽子コンピュータ断層撮影システムであって、
オブジェクトを通過するのに十分な、選択された平均エネルギーを有する複数の陽子を送出するように構成された陽子送出システムと、
前記陽子のそれぞれについて、前記オブジェクトの前及び後の軌跡、並びに、前記オブジェクトを通過した後のエネルギーを測定するように構成された検出器システムと、
前記検出器システムから信号を読み出し、それによって前記陽子のそれぞれの前記軌跡及び前記エネルギーを表す測定データを得るように構成されたデータ収集システムと、
前記測定データを処理して画像再構成を実施し、それによって、前記オブジェクトのコンピュータ断層画像を得るように構成されたプロセッサであって、前記画像再構成は、総変動優秀化に基づく反復の投影ベース再構成アルゴリズムを含む、プロセッサと、
を備える、陽子コンピュータ断層撮影システム。
【請求項33】
陽子治療システムであって、
第1の平均エネルギー及び第2の平均エネルギーを有する陽子ビームを送出するように構成された陽子送出システムであって、前記第1の平均エネルギーは、第1のブラッグピークが、身体の一部分の内部のターゲット領域内の場所で起こるように選択され、前記第2の平均エネルギーは、前記陽子ビームが、前記身体の前記一部分を通過するように選択される、陽子送出システムと、
前記ターゲット領域に対する前記第1のエネルギーのビームの送出を容易にするように構成された第1の検出器システムと、
前記第2のエネルギーを有し、前記身体の前記一部分を通過する前記陽子のそれぞれについて、前記身体の前記一部分の前及び後の軌跡、並びに、前記身体の前記一部分を通過した後のエネルギーを測定するように構成された第2の検出器システムと、
少なくとも前記第2の検出器システムから信号を読み出し、それによって前記第2のエネルギーの陽子のそれぞれの前記軌跡及び前記エネルギーを表す測定データを得るように構成されたデータ収集システムと、
前記測定データを処理して画像再構成を実施し、それによって前記身体の前記一部分のコンピュータ断層画像を得るように構成されたプロセッサであって、前記画像再構成は、総変動優秀化に基づく反復の投影ベース再構成アルゴリズムを含む、プロセッサと、
を備える、陽子治療システム。
【請求項34】
有形コンピュータ可読記憶媒体であって、該有形コンピュータ可読記憶媒体上に記憶されたコンピュータ実行可能命令を有し、該コンピュータ実行可能命令は、1つ又は複数のコンピューティングデバイスを備えるコンピューティングシステムによって可読であり、前記コンピュータ実行可能命令は、
複数の陽子に関するデータを取得することであって、該データは、前記陽子のそれぞれについて第1のトラック及び第2のトラックに関する情報を含み、前記データは、前記第1のトラックと前記第2のトラックとの間での各陽子のエネルギー損失に関する情報を更に含む、取得することと、
各陽子について、前記第1のトラックと前記第2のトラックとの間の経路を推定することと、
総変動優秀化に基づく反復の投影ベース再構成アルゴリズムを使用して、前記陽子のエネルギー損失及び前記経路に基づいて相対阻止能分布の断層撮影解析を実施することと、
を含む動作を、前記コンピューティングシステムに実施させるように、該コンピューティングシステム上で実行可能である、有形コンピュータ可読記憶媒体。
【請求項35】
粒子放射線治療システムであって、
第1の平均エネルギー及び第2の平均エネルギーを有するイオンビームを送出するように構成された粒子放射線送出システムであって、前記第1の平均エネルギーは、第1のブラッグピークが、身体の一部分の内部のターゲット領域内の場所で起こるように選択され、前記第2の平均エネルギーは、前記イオンビームが、前記身体の前記一部分を通過するように選択される、粒子放射線送出システムと、
前記ターゲット領域に対する前記第1のエネルギーのビームの送出を容易にするように構成された第1の検出器システムと、
前記第2のエネルギーを有し、前記身体の前記一部分を通過する前記イオンのそれぞれについて、前記身体の前記一部分の前及び後の軌跡、並びに、前記身体の前記一部分を通過した後のエネルギーを測定するように構成された第2の検出器システムと、
少なくとも前記第2の検出器システムから信号を読み出し、それによって前記第2のエネルギーのイオンのそれぞれの前記軌跡及び前記エネルギーを表す測定データを得るように構成されたデータ収集システムと、
前記測定データを処理して画像再構成を実施し、それによって前記身体の前記一部分のコンピュータ断層画像を得るように構成されたプロセッサであって、前記画像再構成は、総変動優秀化に基づく反復の投影ベース再構成アルゴリズムを含む、プロセッサと、
を備える、粒子放射線治療システム。
【請求項36】
前記イオンは陽子を含む、請求項35に記載のシステム。
【請求項37】
前記イオンは炭素イオンを含む、請求項35に記載のシステム。
【請求項1】
コンピュータ断層撮影を実施するための方法であって、
オブジェクトを通過する複数の陽子について測定データを取得することであって、前記測定データは、前記陽子のそれぞれについて第1のトラック及び第2のトラックに関する情報を含み、該第1のトラック及び該第2のトラックは、それぞれ、前記陽子の、前記オブジェクトの通過の前及び後の該陽子の軌跡に対応し、前記測定データは、前記陽子の、前記オブジェクトの通過によって生じる各陽子の相互作用量に関する情報を更に含む、取得することと、
各陽子について、前記第1のトラック及び前記第2のトラックに少なくとも部分的に基づいて前記オブジェクト内で前記陽子がとる経路を推定することと、
前記陽子の、前記オブジェクトの通過が、連立方程式Ax=bとして表されるか又は表すことが可能であるように、前記陽子の前記相互作用量及び前記推定経路を配列することであって、ここで、xは、前記オブジェクトに関連するパラメータの分布であり、bは、前記オブジェクト内の前記陽子のそれぞれの経路に沿う相互作用から生じる該陽子の前記相互作用量を表し、Aは、bを得るためにxに作用する作用素であり、該作用素Aは、前記オブジェクト内の前記陽子の前記推定経路に関する情報を有し、前記連立方程式は、複数の解を有するように構成される、配列することと、
前記連立方程式について初期解を推定することと、
前記複数の解の中で1つ又は複数の実行可能解を探すことであって、各実行可能解は、既存の解に摂動を与えることによって得られ、前記既存の解の前記摂動なしで得られる別の解よりも、前記オブジェクトパラメータ分布の再構成に関連する量について優れた特性を有する、探すことと、
前記1つ又は複数の実行可能解のうちの選択された1つの解に基づいて前記オブジェクトパラメータ分布を計算することと、
を含む、コンピュータ断層撮影を実施するための方法。
【請求項2】
前記陽子の前記相互作用量は、前記陽子の、前記オブジェクトの通過によって生じる前記陽子のエネルギー損失を含む、請求項1に記載の方法。
【請求項3】
bは、前記陽子の前記推定経路に沿う前記相互作用量の積分値を表す、請求項1に記載の方法。
【請求項4】
前記連立方程式Ax=bは、連立一次方程式を含む、請求項1に記載の方法。
【請求項5】
前記作用素Aは行列を含む、請求項4に記載の方法。
【請求項6】
前記選択された実行可能解は、前記複数の解の中で最適解でない実行可能解を含む、請求項1に記載の方法。
【請求項7】
前記オブジェクトパラメータ分布を計算することは、3Dオブジェクトパラメータ分布を計算することを含む、請求項1に記載の方法。
【請求項8】
前記計算されたオブジェクトパラメータ分布に基づいて前記オブジェクトの断層画像のアレイを形成することを更に含む、請求項1に記載の方法。
【請求項9】
前記オブジェクトパラメータ分布は、電子密度ベース量の分布を含む、請求項1に記載の方法。
【請求項10】
前記電子密度ベース量は、実質的に一様な物質に対する相対的陽子阻止能を含む、請求項9に記載の方法。
【請求項11】
前記実質的に一様な物質は水を含む、請求項10に記載の方法。
【請求項12】
前記再構成されるオブジェクトパラメータ分布は、前記電子密度ベース量の3次元分布を含む、請求項9に記載の方法。
【請求項13】
前記経路を推定することは、前記陽子の最尤経路を推定することを含む、請求項1に記載の方法。
【請求項14】
前記オブジェクトパラメータ分布の再構成に関連する量は、前記再構成されたオブジェクトパラメータ分布の総変動を含む、請求項1に記載の方法。
【請求項15】
前記総変動の前記優れた特性は、前記総変動の、より低い値を含む、請求項14に記載の方法。
【請求項16】
前記再構成されたオブジェクトパラメータ分布の前記総変動は、pkで評価される関数
【数1】
の量を含み、ここで、pkは、相互作用パラメータ分布xのベクトル表現xkの2次元J×J表現である、請求項15に記載の方法。
【請求項17】
前記解に関連する前記総変動は、他の実行可能解に関連する総変動よりも優れている、請求項15に記載の方法。
【請求項18】
前記初期解を推定することは、フィルタリングされた逆投影再構成解を計算することを含む、請求項1に記載の方法。
【請求項19】
前記1つ又は複数の実行可能解を探すことは、
前記オブジェクトパラメータ分布xのベクトル表現xkに摂動を与えることであって、それによって、摂動付与済みベクトルykを得る、摂動を与えることと、
前記摂動付与済みベクトルykに関連する前記再構成されたオブジェクトパラメータ分布に関連する量を評価することと、
前記摂動付与済みベクトルykに関連する量が、前記未摂動ベクトルxkに関連する量より優れている場合、ykを投影することであって、それによって、次のベクトル表現xk+1を得る、ykを投影することと、
の反復を実施することを含む、請求項1に記載の方法。
【請求項20】
前記ベクトルxkに摂動を与えることは、yk=xk+βkvkとなるようにykを計算することを含み、ここで、βkは、摂動の大きさを表し、vkは、摂動ベクトルである、請求項19に記載の方法。
【請求項21】
前記摂動ベクトルvkは、xkにおける前記再構成されたオブジェクトパラメータ分布に関連する量の正規化された劣勾配を負数としたものとして計算される、請求項20に記載の方法。
【請求項22】
ykについて評価された量が、xkについて評価された量以下である場合、前記摂動付与済みベクトルykに関連する量は、前記未摂動ベクトルxkに関連する量に対して優れている、請求項19に記載の方法。
【請求項23】
前記投影することは、或る関連する凸集合上へのxkの数学的に規定された投影としてxk+1を計算することを含む、請求項19に記載の方法。
【請求項24】
前記投影することは、前記測定データが複数のブロックに分割されるように、ブロック反復投影アルゴリズムを使用して、超平面、半空間、超スラブ、又は他の凸集合上に投影することを含む、請求項23に記載の方法。
【請求項25】
前記投影することは、前記連立方程式の個々の超平面上への直交投影とともに、対角成分ごとの緩和を可能にするように構成された対角緩和した直交投影(DROP)ベースアルゴリズムを使用して投影することを含む、請求項24に記載の方法。
【請求項26】
DROPベースアルゴリズムは、対角緩和した直交行列λkUt(k)を含み、ここで、λkは、k番目の反復についての緩和パラメータであり、Ut(k)は、t番目のブロックについて対角要素min(1,1/htj)を有する対角行列であり、htjは、ベクトルxkのj番目のボクセルと交差するt番目のブロック内の陽子履歴の数である、請求項25に記載の方法。
【請求項27】
前記投影することは、次の反復に進む前に、前記ブロックが全て処理されるまで、前記ブロックを通して周期的に実施される、請求項24に記載の方法。
【請求項28】
反復は、処理される所与のブロックについて、前記投影することが該所与のブロックについてだけ実施されるように、各ブロックについて実施される、請求項24に記載の方法。
【請求項29】
前記反復を実施することは、実行可能性近接性チェックを計算することであって、前記再構成されたオブジェクトパラメータ分布に関連する量を評価するという更なるタスクに関する反復が、前記測定データとの所望の一致からはずれて前記解を操向しないことを検証する、計算することを更に含む、請求項19に記載の方法。
【請求項30】
陽子コンピュータ断層撮影を実施する方法であって、
オブジェクトを通過する複数の陽子について測定データを取得することと、
前記測定データに対する総変動優秀化に基づいて投影ベース再構成アルゴリズムを反復して適用することであって、前記オブジェクトの相対阻止能の分布を得る、適用することと、
を含む、陽子コンピュータ断層撮影を実施する方法。
【請求項31】
前記相対阻止能分布に基づいて前記オブジェクトの視覚画像を形成することを更に含む、請求項30に記載の方法。
【請求項32】
陽子コンピュータ断層撮影システムであって、
オブジェクトを通過するのに十分な、選択された平均エネルギーを有する複数の陽子を送出するように構成された陽子送出システムと、
前記陽子のそれぞれについて、前記オブジェクトの前及び後の軌跡、並びに、前記オブジェクトを通過した後のエネルギーを測定するように構成された検出器システムと、
前記検出器システムから信号を読み出し、それによって前記陽子のそれぞれの前記軌跡及び前記エネルギーを表す測定データを得るように構成されたデータ収集システムと、
前記測定データを処理して画像再構成を実施し、それによって、前記オブジェクトのコンピュータ断層画像を得るように構成されたプロセッサであって、前記画像再構成は、総変動優秀化に基づく反復の投影ベース再構成アルゴリズムを含む、プロセッサと、
を備える、陽子コンピュータ断層撮影システム。
【請求項33】
陽子治療システムであって、
第1の平均エネルギー及び第2の平均エネルギーを有する陽子ビームを送出するように構成された陽子送出システムであって、前記第1の平均エネルギーは、第1のブラッグピークが、身体の一部分の内部のターゲット領域内の場所で起こるように選択され、前記第2の平均エネルギーは、前記陽子ビームが、前記身体の前記一部分を通過するように選択される、陽子送出システムと、
前記ターゲット領域に対する前記第1のエネルギーのビームの送出を容易にするように構成された第1の検出器システムと、
前記第2のエネルギーを有し、前記身体の前記一部分を通過する前記陽子のそれぞれについて、前記身体の前記一部分の前及び後の軌跡、並びに、前記身体の前記一部分を通過した後のエネルギーを測定するように構成された第2の検出器システムと、
少なくとも前記第2の検出器システムから信号を読み出し、それによって前記第2のエネルギーの陽子のそれぞれの前記軌跡及び前記エネルギーを表す測定データを得るように構成されたデータ収集システムと、
前記測定データを処理して画像再構成を実施し、それによって前記身体の前記一部分のコンピュータ断層画像を得るように構成されたプロセッサであって、前記画像再構成は、総変動優秀化に基づく反復の投影ベース再構成アルゴリズムを含む、プロセッサと、
を備える、陽子治療システム。
【請求項34】
有形コンピュータ可読記憶媒体であって、該有形コンピュータ可読記憶媒体上に記憶されたコンピュータ実行可能命令を有し、該コンピュータ実行可能命令は、1つ又は複数のコンピューティングデバイスを備えるコンピューティングシステムによって可読であり、前記コンピュータ実行可能命令は、
複数の陽子に関するデータを取得することであって、該データは、前記陽子のそれぞれについて第1のトラック及び第2のトラックに関する情報を含み、前記データは、前記第1のトラックと前記第2のトラックとの間での各陽子のエネルギー損失に関する情報を更に含む、取得することと、
各陽子について、前記第1のトラックと前記第2のトラックとの間の経路を推定することと、
総変動優秀化に基づく反復の投影ベース再構成アルゴリズムを使用して、前記陽子のエネルギー損失及び前記経路に基づいて相対阻止能分布の断層撮影解析を実施することと、
を含む動作を、前記コンピューティングシステムに実施させるように、該コンピューティングシステム上で実行可能である、有形コンピュータ可読記憶媒体。
【請求項35】
粒子放射線治療システムであって、
第1の平均エネルギー及び第2の平均エネルギーを有するイオンビームを送出するように構成された粒子放射線送出システムであって、前記第1の平均エネルギーは、第1のブラッグピークが、身体の一部分の内部のターゲット領域内の場所で起こるように選択され、前記第2の平均エネルギーは、前記イオンビームが、前記身体の前記一部分を通過するように選択される、粒子放射線送出システムと、
前記ターゲット領域に対する前記第1のエネルギーのビームの送出を容易にするように構成された第1の検出器システムと、
前記第2のエネルギーを有し、前記身体の前記一部分を通過する前記イオンのそれぞれについて、前記身体の前記一部分の前及び後の軌跡、並びに、前記身体の前記一部分を通過した後のエネルギーを測定するように構成された第2の検出器システムと、
少なくとも前記第2の検出器システムから信号を読み出し、それによって前記第2のエネルギーのイオンのそれぞれの前記軌跡及び前記エネルギーを表す測定データを得るように構成されたデータ収集システムと、
前記測定データを処理して画像再構成を実施し、それによって前記身体の前記一部分のコンピュータ断層画像を得るように構成されたプロセッサであって、前記画像再構成は、総変動優秀化に基づく反復の投影ベース再構成アルゴリズムを含む、プロセッサと、
を備える、粒子放射線治療システム。
【請求項36】
前記イオンは陽子を含む、請求項35に記載のシステム。
【請求項37】
前記イオンは炭素イオンを含む、請求項35に記載のシステム。
【図1A】


【図1B】
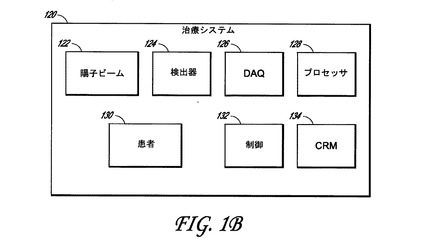
【図2A】
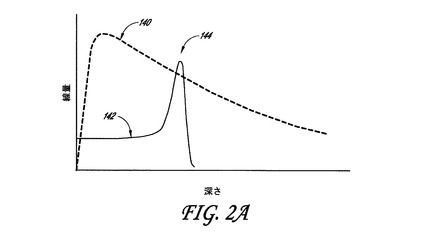
【図2B】
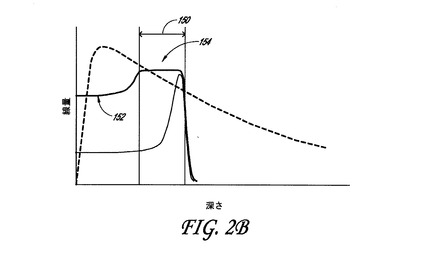
【図3A】
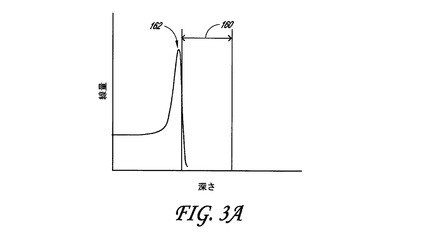
【図3B】
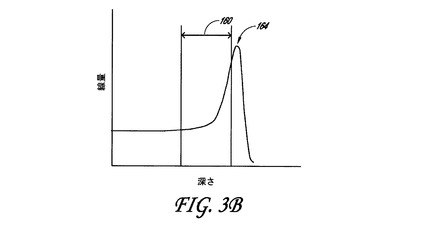
【図4】

【図5】
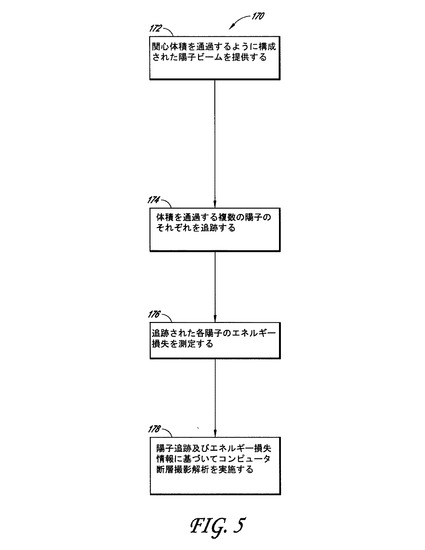
【図6】
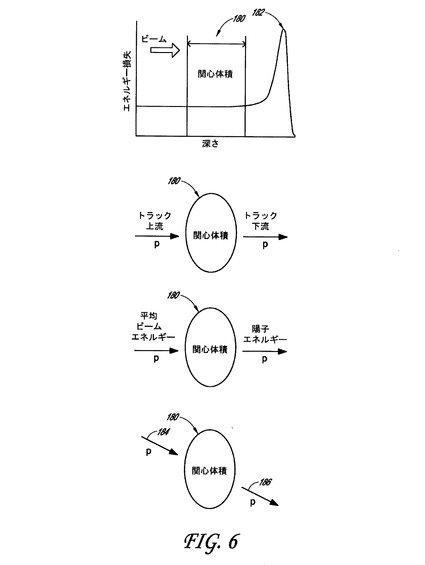
【図7】

【図8】
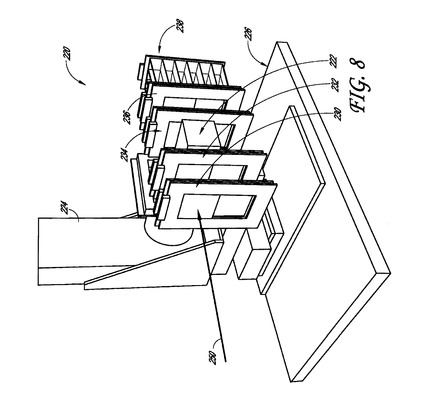
【図9】
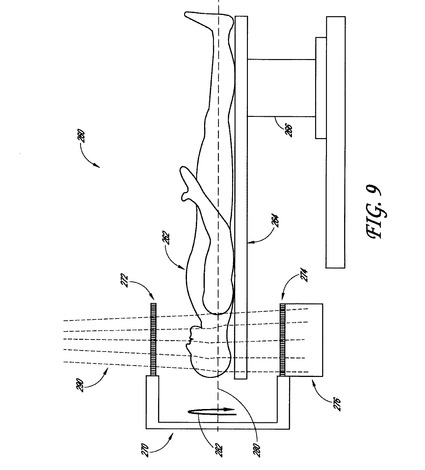
【図10】
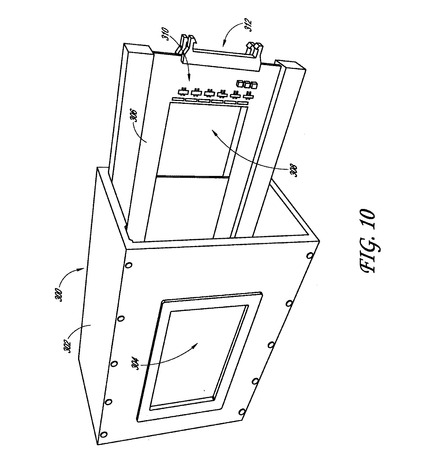
【図11】
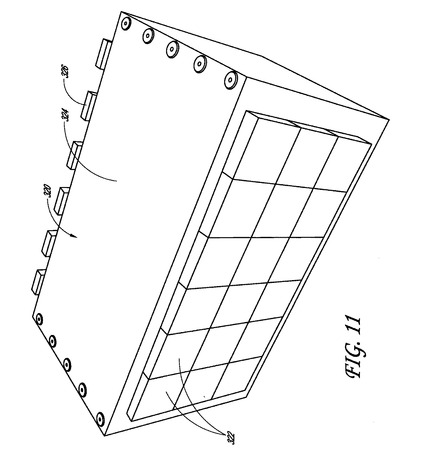
【図12】
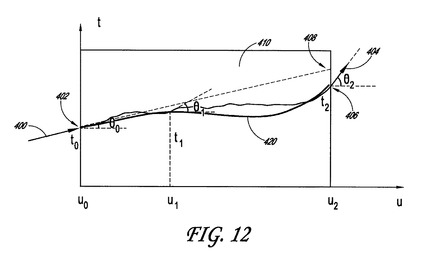
【図14】
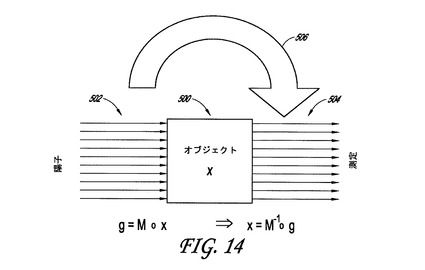
【図15】
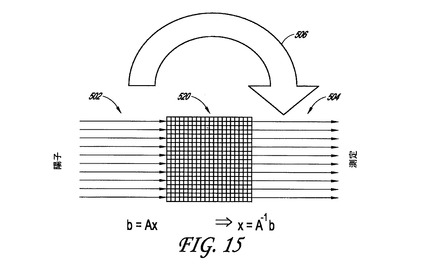
【図16】
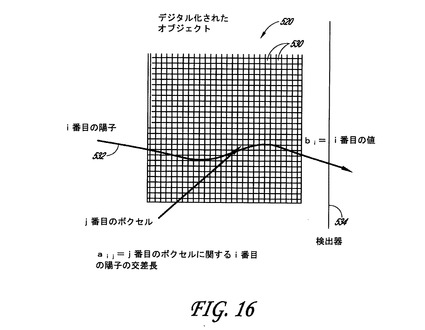
【図17】
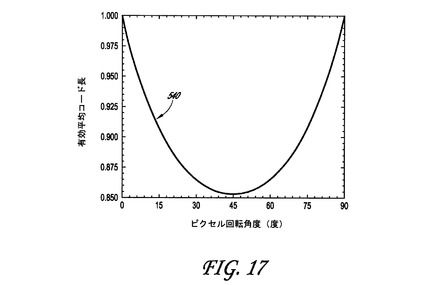
【図18】
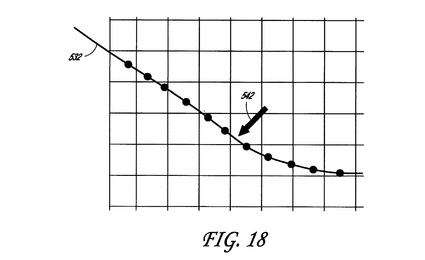
【図19B】
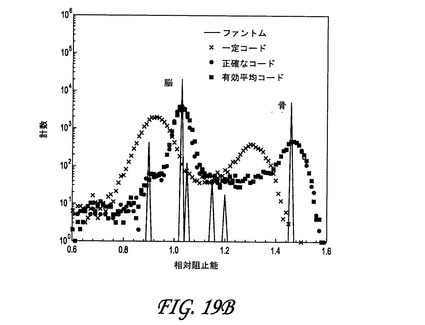
【図20A】

【図20B】
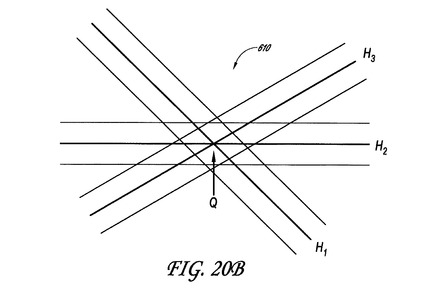
【図21A】

【図21B】
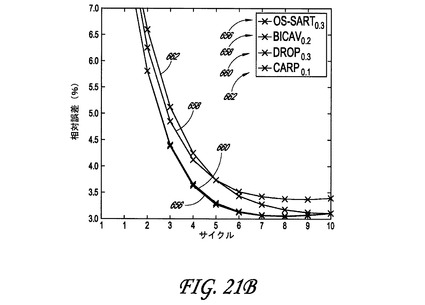
【図24】
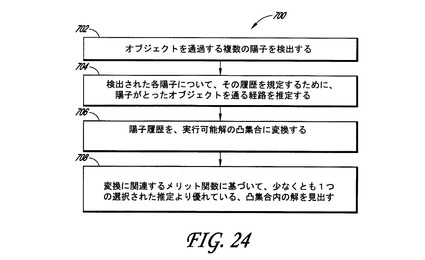
【図25】
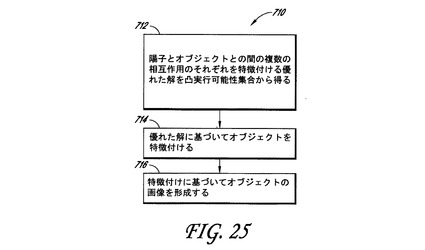
【図26A】
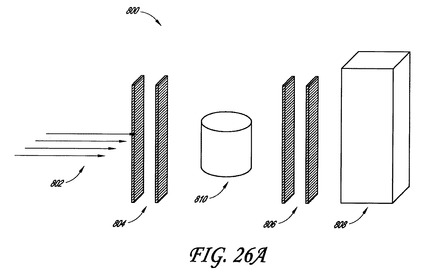
【図28A】
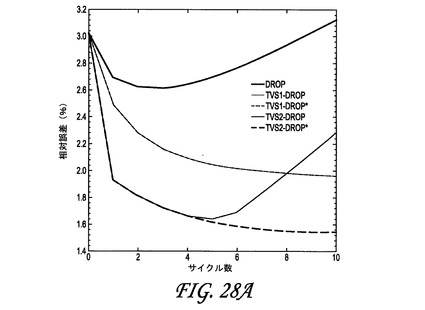
【図28B】
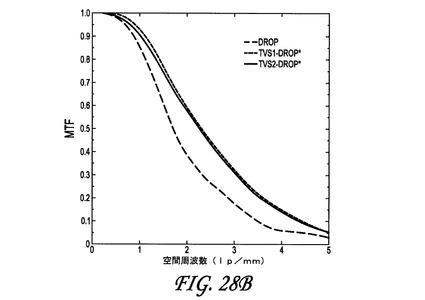
【図28C】
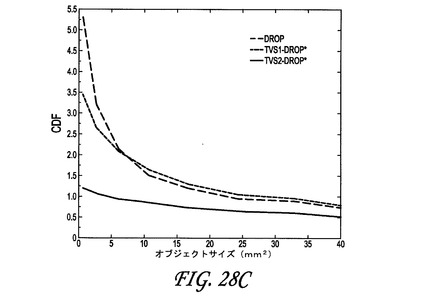
【図29】
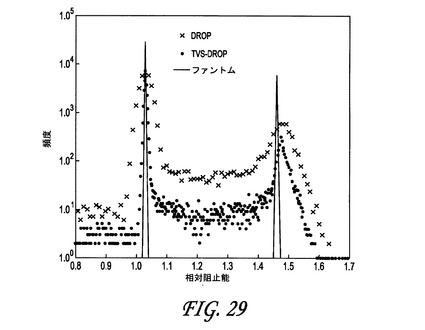
【図13】
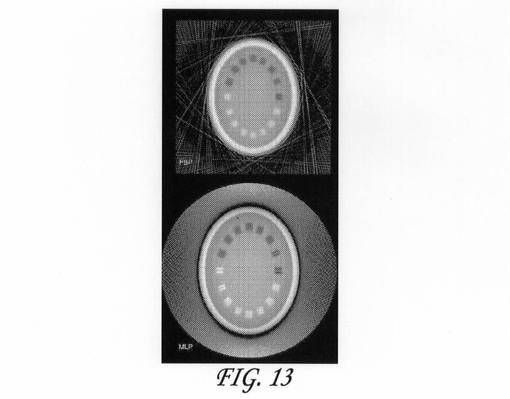
【図19A】
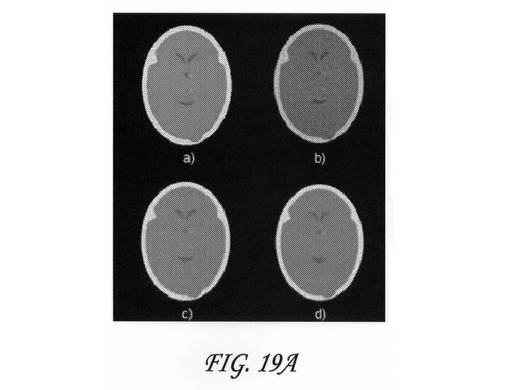
【図22】
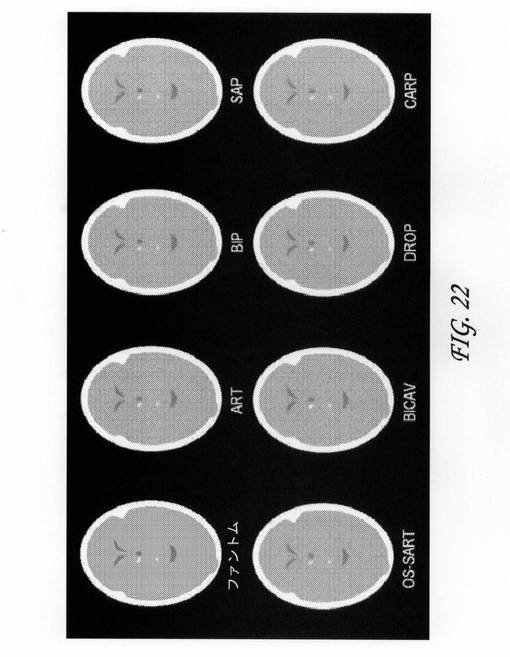
【図23】
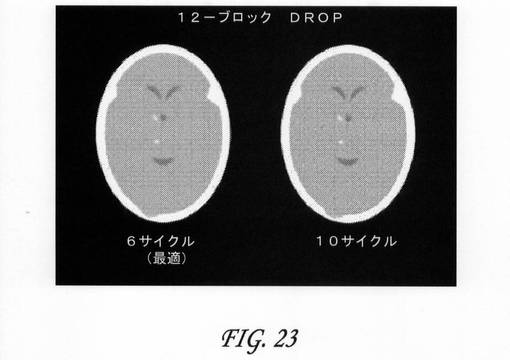
【図26B】
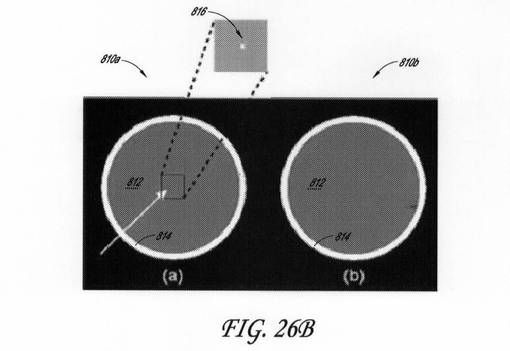
【図27】
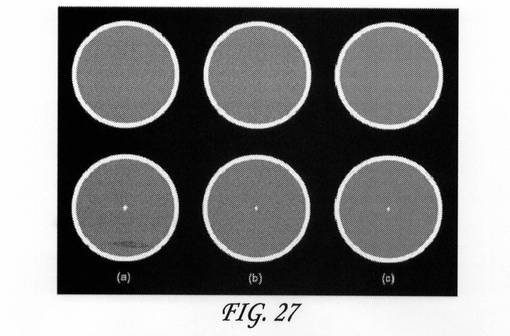
【図30】
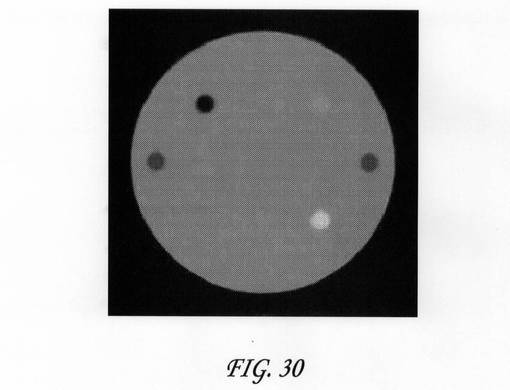
【図1B】
【図2A】
【図2B】
【図3A】
【図3B】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19B】
【図20A】
【図20B】
【図21A】
【図21B】
【図24】
【図25】
【図26A】
【図28A】
【図28B】
【図28C】
【図29】
【図13】
【図19A】
【図22】
【図23】
【図26B】
【図27】
【図30】
【公表番号】特表2013−519452(P2013−519452A)
【公表日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願番号】特願2012−553059(P2012−553059)
【出願日】平成23年2月11日(2011.2.11)
【国際出願番号】PCT/US2011/024644
【国際公開番号】WO2011/100628
【国際公開日】平成23年8月18日(2011.8.18)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.フロッピー
2.BLU−RAY DISC
【出願人】(503042820)ローマ リンダ ユニヴァーシティ メディカル センター (21)
【出願人】(512208888)ユニヴァーシティ オブ ハイファ (1)
【出願人】(512208899)ユニヴァーシティ オブ ウォロンゴン (1)
【Fターム(参考)】
【公表日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願日】平成23年2月11日(2011.2.11)
【国際出願番号】PCT/US2011/024644
【国際公開番号】WO2011/100628
【国際公開日】平成23年8月18日(2011.8.18)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.フロッピー
2.BLU−RAY DISC
【出願人】(503042820)ローマ リンダ ユニヴァーシティ メディカル センター (21)
【出願人】(512208888)ユニヴァーシティ オブ ハイファ (1)
【出願人】(512208899)ユニヴァーシティ オブ ウォロンゴン (1)
【Fターム(参考)】
[ Back to top ]