
階段揚重装置
【課題】 重量物の階段揚重作業時の重心位置を低くでき、重量物の階段揚重を安定して行える階段揚重装置を提供する。
【解決手段】 下段移動台10と、中段フレーム20と、荷台30と、からなる3層構造の装置本体を備え、中段前部脚22,23および中段後部脚24,25が、上端が中段フレーム20より上方に位置するように、中段フレームを貫通して昇降駆動される。
【解決手段】 下段移動台10と、中段フレーム20と、荷台30と、からなる3層構造の装置本体を備え、中段前部脚22,23および中段後部脚24,25が、上端が中段フレーム20より上方に位置するように、中段フレームを貫通して昇降駆動される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、階段を利用して重量物を運搬する階段揚重装置に関する。
【背景技術】
【0002】
今日、階段はビルなどの高層建築物や駅を始めとして至る処に設置されている。階段を利用して荷物を運搬するニーズは高く、労働力軽減を目的として、各種の階段用運搬ロボットが開発されている。たとえば、荷物運搬用には、特開2004−276892号公報(特許文献1)、特開2002−19616号公報(特許文献2)、特開2002−127909号公報(特許文献3)、特開2002−225720号公報(特許文献4)、特開2001−55178号公報(特許文献5)、特開2001−225754号公報(特許文献6)、特開2001−233600号公報(特許文献7)、特開平10−109653号公報(特許文献8)、特開平9−66839号公報(特許文献9)、特開平8−58641号公報(特許文献10)、また車椅子移動用には特開2004−181040号公報(特許文献11)、特開2002−178930号公報(特許文献12)にそのような荷物運搬用の装置が提案されている。
【0003】
また、移動時の安定性を保つための工夫として特開平8−73197号公報(特許文献13)に見られるようにガイドレールを安定して支持する装置が提案されている。
【0004】
さらに、特開平6−63876号公報(特許文献14)においては、階段などの着地位置が制約される環境を移動するときに、目標位置と実際の着地位置との誤差を検出し歩容(歩幅)を修正する方法が提案されている。また、特開平6−134681号公報(特許文献15)においては、歩行ロボット装置の安定性を増すためにロボット本体に補助脚を設ける方法が提案されている。さらに、階段歩行を目的として2足歩行ロボットも考案され一部は既に公開されている。
【特許文献1】特開2004−276892号公報
【特許文献2】特開2002−19616号公報
【特許文献3】特開2002−127909号公報
【特許文献4】特開2002−225720号公報
【特許文献5】特開2001−55178号公報
【特許文献6】特開2001−225754号公報
【特許文献7】特開2001−233600号公報
【特許文献8】特開平10−109653号公報
【特許文献9】特開平9−66839号公報
【特許文献10】特開平8−58641号公報
【特許文献11】特開2004−181040号公報
【特許文献12】特開2002−178930号公報
【特許文献13】特開平8−73197号公報
【特許文献14】特開平6−63876号公報
【特許文献15】特開平6−134681号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、上記のいずれの従来技術にあっても、数百kgを超える重量物を階段を利用して安全性を確保しながら昇降できる能力を持たせることはできない。また、2足歩行ロボットの場合には、重量物に対する重心の移動が難しく、荷物の運搬には不向きである。
【0006】
本発明は、以上のような従来技術の課題を解決するためになされたもので、重量物の階段揚重作業時の重心位置を低くする構造を採用することにより、重量物の階段揚重を安定して行える階段揚重装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
そこで、本発明は、階段揚重装置であって、前部に上下方向に長さが可変駆動される少なくとも2本の中段前部脚を有し、且つ後部に上下方向に長さが可変駆動される少なくとも2本の中段後部脚を有し、前記中段前部脚の群の最大幅および前記中段後部脚の群の最大幅が、階段の踏み面寸法の2〜3倍の範囲内に設定された中段フレームと、前記中段フレームの下方に配置され、前部に上下方向に長さが可変駆動される少なくとも2本の下段前部脚を有し、且つ後部に上下方向に長さが可変駆動される少なくとも2本の下段後部脚を有すると共に、前記下段前部脚の群の最大幅および前記下段後部脚の群の最大幅が、階段の踏み面寸法の1〜2倍の範囲内に設定され、前記中段フレームの前記中段前部脚と前記中段後部脚との間で水平方向に移動できるように前記中段フレームに連結された下段移動台と、前記中段フレームの上方に配置され、且つ前記中段フレームおよび前記下段移動台に対して水平方向に相対移動できるように連結された、重量物が載置される荷台と、前記中段フレーム、前記下段移動台、および荷台を水平方向に相対移動させる水平駆動装置と、前記中段前部脚、前記中段後部脚、前記下段前部脚、および前記下段後部脚の前記中段フレームもしくは前記下段移動台から下方へ伸びる長さを変化させる垂直駆動装置と、前記水平駆動装置および前記垂直駆動装置を制御する制御装置と、を備え、前記下段前部脚の下端部の上下方向の移動距離をαとしたときに、前記下段後部脚の下端部の上下方向の移動距離が、階段の蹴上げ寸法にαを加えた長さに設定され、前記中段前部脚の上下方向の移動距離が階段の蹴上げ寸法にαを加えた長さに設定されれ、且つ中段後部脚の上下方向の移動距離が、階段の蹴上げ寸法の2倍にαを加えた長さに設定され、前記中段前部脚および前記中段後部脚の上端が、前記中段フレームより上方に位置するように、前記中段前部脚および前記中段後部脚が前記中段フレームを貫通して昇降駆動されることを要旨とする。
【発明の効果】
【0008】
本発明によれば、例えばエレベータ昇降路の上方に位置する機械室への階段を用いた機器の搬入搬出や、階段を用いた荷物搬送において、重心位置を低くすることができ、安全且つ簡便に重量物の移動が可能になる。
【発明を実施するための最良の形態】
【0009】
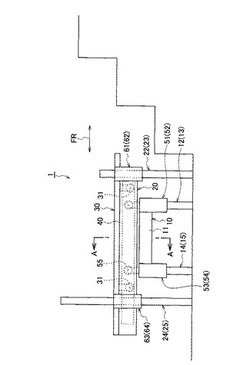
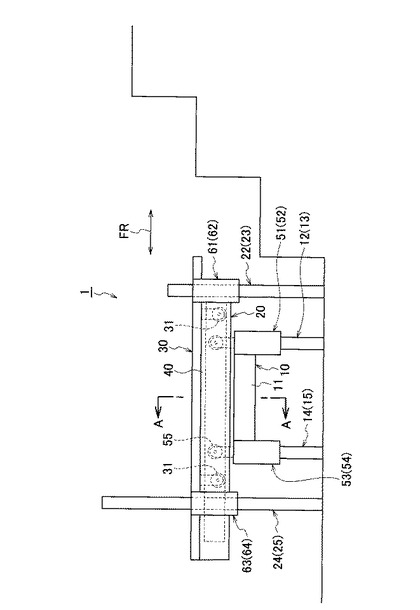
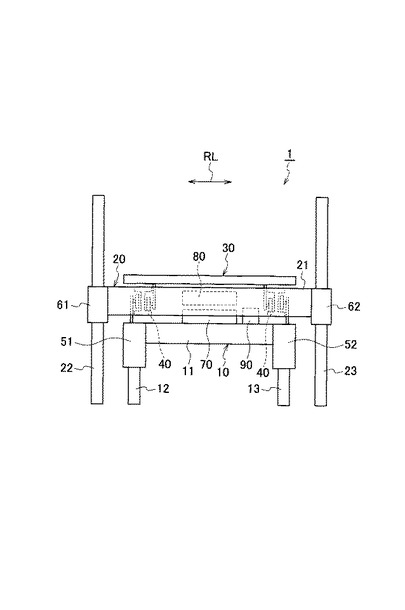
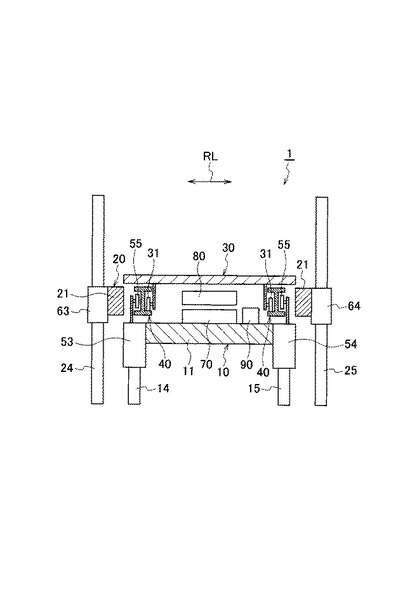
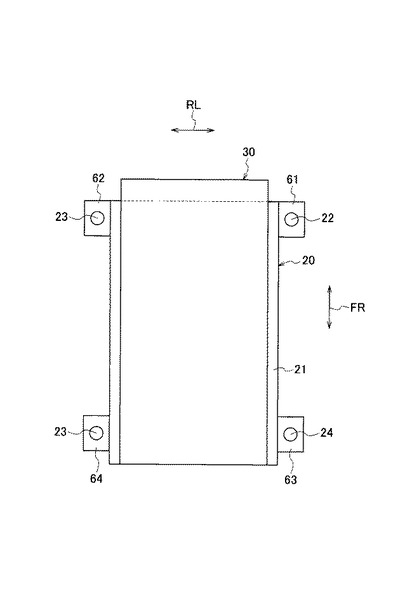
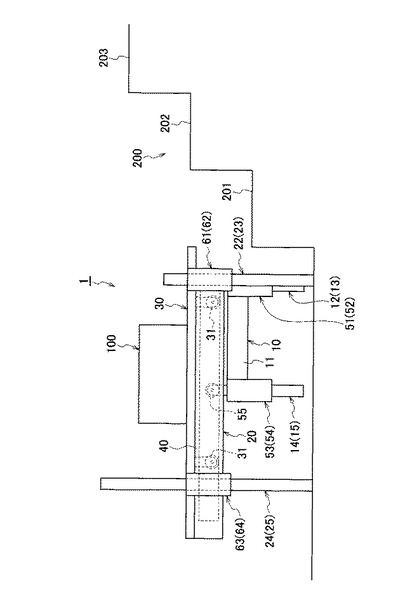
以下、本発明の実施の形態に係る階段揚重装置の詳細を図面に基づいて説明する。図1は階段揚重装置の側面図、図2は装置を前方から見た正面図、図3は図1のA−A断面図、図4は平面図である。但し、図面は模式的なものであり、各材料層の厚みやその比率などは現実のものとは異なることに留意すべきである。したがって、具体的な厚みや寸法は以下の説明を参酌して判断すべきものである。また、図面相互間においても互いの寸法の関係や比率が異なる部分が含まれている。
【0010】
図1〜図3に示すように、本実施の形態に係る階段揚重装置1は、下段移動台10と、中段フレーム20と、荷台30と、からなる3層構造の装置本体を備えている。本実施の形態において、これら下段移動台10、中段フレーム20、および荷台30は、中段フレーム20に設けられた一対のガイドレール40に沿ってスライド移動可能に連結され、互いに独立して水平一軸方向(図中矢印FRで示す。)に互いに独立して移動することができる。
【0011】
下段移動台10は、長方形状の台板11に、長さが可変とされた複数の脚が取り付けられている。なお、本実施の形態では4本の脚が取り付けられており、台板11の装置進行方向前側の角部に下段前部脚12,13が、台板11の装置後退方向の角部に下段後部脚14,15が取り付けられている。なお、本実施の形態では、下段後部脚14,15が2段のテレスコピック構造となっており、内部に嵌合した状態で更に伸縮動作を行う突出脚14a,15a(図11参照)を備えている。図1〜図3に示すように、これら下段前部脚12,13、下段後部脚14,15の基部には、例えば油圧機構などを利用した垂直駆動装置としての下段脚駆動装置51〜54が順次設けられており、伸縮駆動される。
【0012】
また、中段フレーム20は、下段移動台10の輪郭をなす長方形よりも大きな長方形状の輪郭をなす枠組み体でなる。中段フレーム20は、少なくとも4辺が剛性の高い枠材21で構成されている。中段フレーム20のほぼ四隅に位置する部分には、有効長(枠材21よりも下方に伸びる脚の長さ)が可変とされた複数の脚が取り付けられている。本実施の形態では、中段フレーム20の脚の数が下段移動台10と同様に4本であり、中段前部脚22,23、中段後部脚24,25が取り付けられている。中段前部脚22,23は、階段の蹴上げ寸法(1段分の段差)に、下段前部脚12,13の最大上下移動距離(以下、αという。)を加えた長さよりも長い棒状の脚である。また、中段後部脚24,25は、階段の蹴上げ寸法(1段分の段差)の2倍にαを加えた長さよりも長い棒状の脚である。これら中段移動台20の中段前部脚22,23、中段後部脚24,25は、例えば油圧機構などを利用した中段脚駆動装置61〜64により昇降駆動されて有効長を変化する。
【0013】
なお、下段前部脚12,13、下段後部脚14,15、中段前部脚22,23、中段後部脚24,25の先端(下端)には、各脚が接地したか否かを検出する接地センサが設けていてもよい。
【0014】
中段フレーム20の中間部には、上記した一対のガイドレール40,40が、ほぼ下段移動台10の幅寸法に近似した間隔を隔てて、それぞれ前後方向(矢印FRの方向)に伸びるように架設されている。図3に示すように、このガイドレール40は、鉄道レールと同様の断面H型の鋼材でなり、両側の凹状のガイド溝のうち、一方側のガイド溝に下段移動台10側に設けられたローラ55が転動可能に収納され、他方側のガイド溝に荷台30側のローラ31が転動可能に収納されている。このように、下段移動台10と中段フレーム20との間はローラ55が転動することにより、中段フレーム20と荷台30との間はローラ31が転動することにより、互いに独立して前後方向(矢印FRの方向)に移動可能にしている。
【0015】
上記したように、下段移動台10の脚12〜15は、中段フレーム20の脚22〜25より内側にあり、下段移動台10の全体が中段フレーム20により包み込まれる形をしている。また、下段移動台10と中段フレーム20とはガイドレール40、40の凹溝に収容されたローラ55により互いに離脱することなく保持され、互いに水平方向に独立して移動することができる。同様に、ガイドレール40に対して荷台30側のローラ31も離脱することなく保持された状態で、中段フレーム20と荷台30とが互いに独立して水平移動を可能にしている。したがって、ガイドレール40,40と、これらの凹溝に収容されたローラ31,55により脱輪は防止される。
【0016】
下段脚駆動装置51〜54及び中段脚駆動装置61〜64は、例えば、下段移動台10に取り付けられた各脚12〜15や中段フレーム20に取り付けられた各脚22〜25に対応したインバータ回路と図示しない駆動モータ(油圧モータ)とを有し、制御装置90(図2および図3参照)によってその動作が個別に制御される。すなわち、制御装置90は、下段脚駆動装置51〜54や中段脚駆動装置61〜64の個々の目標駆動力を速度に変換した速度指令信号を、各駆動装置51〜54、61〜64が備えるインバータ回路を介して駆動モータに各々入力することで、各駆動装置51〜54、62〜64の動作を制御する。
【0017】
また、図2および図3に示すように、下段移動台10と中段フレーム20との水平方向の相対移動は下段移動台10に固定された水平方向駆動装置70の駆動によって行われる。また、中段フレーム20には水平方向駆動装置80が具備され、中段フレーム20と荷台30との水平方向の相対移動はこの水平方向駆動装置80の駆動により行われる。これら水平方向駆動装置70や水平方向駆動装置80の動作は、下段脚駆動装置51〜54及び中段脚駆動装置61〜64とともに、制御装置90により制御される。なお、制御装置90は、装置本体に設置する場合には、水平方向駆動装置70又は80の近傍のスペース、例えば、図2および図3に示すような下段移動台10の上の他に、中段フレーム20、荷台30の間の隙間スペースあるいは下段移動台10の下部に設けることができる。しかしながら、この制御装置90は、有線又は無線を介して水平方向駆動装置70、80に接続して使用者が手元で遠隔操作できる構成にすることも可能である。
【0018】
なお、荷台30には、この荷台30のピッチ角とロール角とを検知する図示しない荷台水平度検出器(傾斜角検知手段)が取り付けてある。この荷台水平度検出器は、荷台30の少なくとも2箇所に設置された複数のセンサからなり、これら複数のセンサのうちの1つで荷台30のピッチ角を検知し、他の1つで荷台30のロール角を検知する。なお、荷台30のピッチ角は、荷台30の水平移動方向を基準とした前後の傾斜角であり、荷台30のロール角は、荷台30の水平移動方向を基準とした左右の傾斜角である。また、それぞれの脚の下端から各移動台の底面までの距離、つまり有効長を測定するため、それぞれの脚12〜15、22〜25毎に、図示しない脚伸縮長検出器が取り付けてある。また、水平移動方向の前方側の脚12,13,22,23には、これらの脚が階段と衝突するのを避けるための近接センサあるいはリミットスイッチを用いた図示しない近接検出器が取り付けてある。加えて、必要に応じて、重量物Wに加わる加速度を低減するために適切な場所、例えば荷台30に図示しない加速度検出器を取り付ける。
【0019】
そして、制御装置90には、図示しない水平度検出器や脚12〜15、22〜25毎の図示しない脚伸縮長検出器、前側の脚12,13、22,23のそれぞれが階段と衝突するのを避けるための図示しない近接検出器や、図示しない加速度検出器などからの信号が入力され、これらの信号をもとに脚並びに下段移動台10、中段フレーム20、荷台30のフィードバック制御を行う。
【0020】
特に、本実施の形態では、制御装置90は、下段前部脚12,13、下段後部脚14,15、中段前部脚22,23、および中段後部脚24,25の垂直駆動制御、ならびに下段移動台10と中段フレーム20と荷台30とをそれぞれ互いに独立して水平駆動制御する場合に、所定の時間差をおいて次工程に進む動作制御指令を出すように設定されている。その理由は、下段前部脚12,13、下段後部脚14,15、中段前部脚22,23、および中段後部脚24,25の垂直駆動、ならびに下段移動台10と中段フレーム20と荷台30とを独立に水平駆動をシーケンシャルに行う場合、所定の時間差を置くことにより装置本体が動くことによって生じる機械的振動が減衰した状態から、次の動作を開始することができるためである。この結果、制御によって発生しがちな過渡応答による過大な振動を未然に抑制することが可能になる。
【0021】
下段移動台10の下段前部脚12,13、下段後部脚14,15は、上記したようにテレスコピックな構造となっている。そして、それぞれの脚が、例えば油圧機構を利用した下段脚駆動装置51〜54により上下方向に伸縮してその有効長の調整を可能にしている。これら下段前部脚12,13、下段後部脚14,15ならびに下段脚駆動装置51〜54は、下段移動台10にボルトなどで着脱可能に固定されている。
【0022】
また、上記した水平方向駆動装置70,80は、例えば油圧機構を利用した駆動装置であってもよいし、ボールネジ又はラックとピニオンを用いたサーボ機構、あるいはリニア駆動によるサーボ機構により下段移動台10と中段フレーム20と荷台30とを相対移動させるものであってもよい。
【0023】
なお、下段移動台10の脚間距離は使用する階段の踏み面の幅より大きく、かつ過剰に大きくしないために踏み面の2倍以内の寸法、すなわち階段の踏み面寸法の1〜2倍の範囲内に設定されている。
【0024】
以上、本実施の形態の階段揚重装置1の構成について説明した。この階段揚重装置1によれば、中段フレーム20の中段前部脚22,23と中段後部脚24,25とがテレスコピックな構造を採用せず、中段フレーム20の上方へ突き出る構成であるため、中段フレーム20の下に突出する脚の長さを必要以上に長くする必要が無く、装置全体の重心位置を低くすることができる。このため、本実施の形態の階段揚重装置1では、重量物を荷台30上に重心位置を低く置くことができるため、安定性が良く安全な荷物搬送を行うことができる。
【0025】
また、本実施の形態では、下段前部脚12,13、下段後部脚14,15、中段前部脚22,23、および中段後部脚24,25の垂直駆動制御、ならびに下段移動台10と中段フレーム20と荷台30とをそれぞれ互いに独立して水平駆動制御する場合に、所定の時間差をおいて次工程に進む動作制御指令を出すように設定しているため、所定の時間差を置くことにより装置本体が動くことによって生じる機械的振動が減衰した状態から、次の動作を開始することができ、制御によって発生しがちな過渡応答による過大な振動を未然に抑制する効果がある。
【0026】
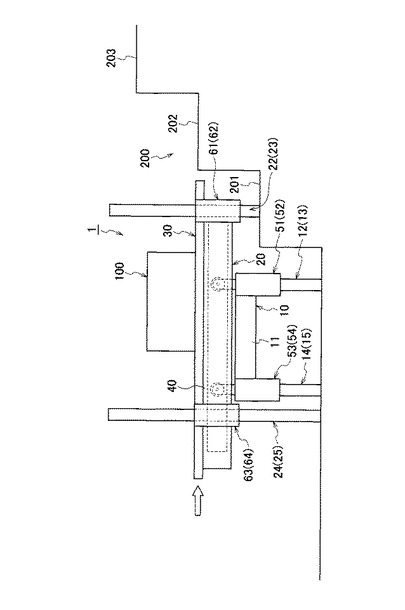
以下、図1ならびに図5〜図11を用いて、本実施の形態に係る階段揚重装置1で階段200を利用して重量物100を上階側へ搬送する動作を説明する。
【0027】
(ステップ1)
図1に示すように、下段移動台10、中段フレーム20、荷台30は、下段移動台10と中段フレーム20との間に取り付けられた水平方向駆動装置70、ならびに中段フレーム20と荷台30との間に取り付けられた水平方向駆動装置80により、ほぼ同一の荷台中心線上に固定されている。すなわち、この状態で重量物100は、重心の位置が荷台30あるいは下段移動台10のほぼ中央になるように積載する。
【0028】
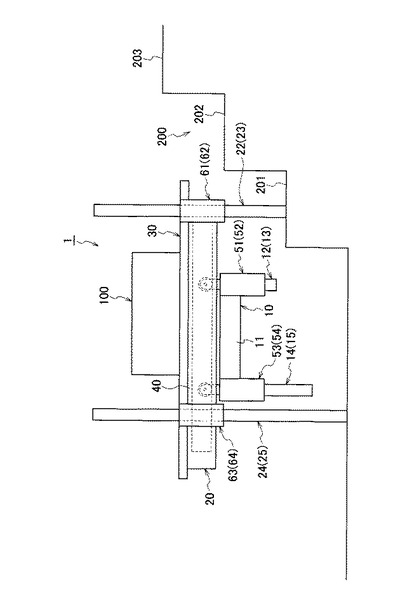
(ステップ2)
上記ステップ1の状態で荷台30の中央に重量物100が積載された状態で、図5に示すように、中段フレーム20の中段前部脚22,23と中段後部脚24,25を用いて荷台30の水平度を保ちながら、下段移動台10の下段前部脚12,13と下段後部脚14,15を下段脚駆動装置51〜54により、予め設定しておいた下段前部脚12,13の最大上下移動距離α縮短させる。このときは、荷台30と接地している中段フレーム20とは中央部分が一致した状態にあるため、荷台30に積載された重量物100は安定した状態にある。
【0029】
なお、本実施の形態では、この工程において下段後部脚14,15もαだけ縮短させている。その後、下段移動台10を水平方向駆動装置70により階段200の方向へ水平移動させる。続いて、下段移動台10の下段脚駆動装置51〜54を作動させて、下段前部脚12,13と下段後部脚14,15を接地させて安定させる。
【0030】
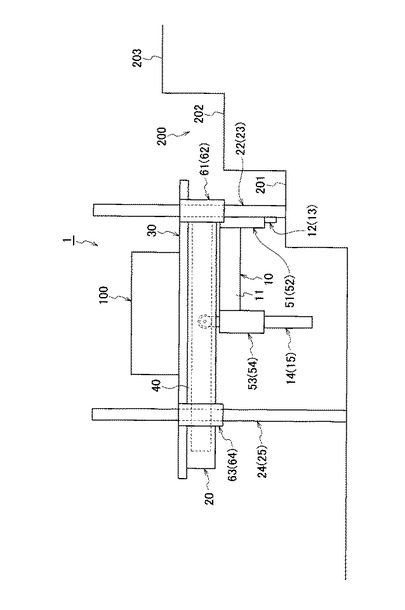
(ステップ3)
次に、図6に示すように、水平方向駆動装置80によって、荷台30を階段進行方向に第1段目の踏み面201の長さに合わせて水平移動させる。なお、荷台30の移動後の重量物100の重心位置は、下段移動台10の下段前部脚12,13と下段後部脚14,15で保持される安定範囲内に収まるように水平移動の制御がなされる。
【0031】
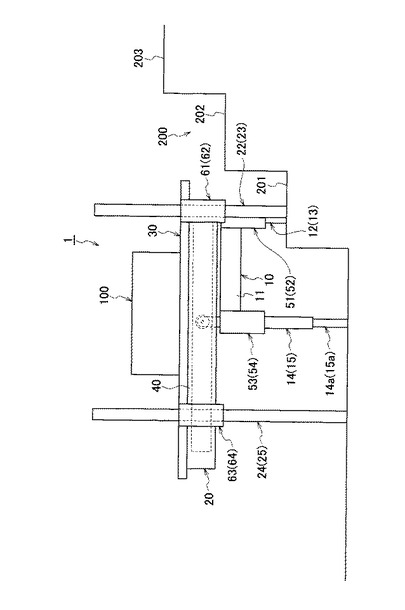
(ステップ4)
次に、図7に示すように、中段フレーム20の中段脚駆動装置61〜64を駆動して脚の有効長を縮短させる。具体的には、中段前部脚22,23についてはその下端が階段200の蹴上げの高さよりも少し高くなるまで縮め、中段後部脚24,25については水平移動で床面や踏み面と干渉しなくなる分だけ縮める。続いて、荷台30ならびに下段移動台10を位置固定したまま中段フレーム20のみを階段200の第1段目の踏み面201の長さまで水平方向駆動装置70,80により水平移動させる。すなわち、荷台30は、下段移動台10と中段フレーム20との間に取り付けられた水平方向駆動装置70と、中段フレーム20と荷台30との間に取り付けられた水平方向駆動装置80と、を同時に逆方向に駆動することにより、重量物100の位置を変えることなく中段フレーム20のみを水平移動させる。
【0032】
この際、下段移動台10と中段フレーム20と荷台30とは、ガイドレール40と、これを転動するローラ31,55とによって、互いに逆方向への水平移動をガイドされる。
【0033】
中段フレーム20の水平移動が完了した後、中段フレーム20の中段前部脚22,23、中段後部脚24,25を中段脚駆動装置61〜64を用いて降下させて着地させて安定させる。
【0034】
(ステップ5)
次に、図8に示すように、中段フレーム20をガイドとして利用しながら階段200の第1段目の踏み面201相当の距離分だけ、荷台30を水平方向駆動装置80により進行方向へ水平移動させる。
【0035】
(ステップ6)
次に、図9に示すように、荷台30の水平度を確認しながら、中段フレーム20の脚の有効長を中段脚駆動装置61〜64により伸張させ重量物100ならびに下段移動台10とともに装置全体を階段200の蹴上げ相当分の距離だけ持ち上げる。
【0036】
(ステップ7)
次に、図10に示すように、下段移動台10を水平方向駆動装置70により進行方向へ踏み面201の長さ相当分だけ移動させる。
【0037】
(ステップ8)
図11に示すように、下段移動台10の下段前部脚12,13、下段後部脚14,15を下段脚駆動装置51〜54により着地させて安定化させる。このとき、下段後部脚14,15はテレスコピック構造として内部に嵌合されている突出脚14a,15aを突出させて着地させる。このように下段移動台10の下段後部脚14,15をテレスコピック構造としたことにより、突出脚14a,15aを突出させな状態での下段移動台10の高さを低くすることができ、結果として階段揚重装置1全体の重心位置を低くできる。
【0038】
(ステップ9)
次に、中段フレーム20の中段前部脚22,23、中段後部脚24,25を縮短させた後、下段移動台10をガイドとして中段フレーム20を階段200の第2段目の踏み面202相当の距離分だけ水平方向駆動装置70により水平移動させる。
【0039】
上記したステップ1〜9の動作を1サイクルとする揚重動作を階段揚重装置1に行わせることにより、階段200を上ることができる。
【0040】
なお、本実施の形態では、次ステップに移行する際に所定の時間差を置いている。このように所定時間差を置くことにより、装置本体が動くことによって生じる機械的振動が減衰した状態から、次の動作を開始することができ、制御によって発生しがちな過渡応答による過大な振動を未然に抑制できる。
【0041】
以上、階段揚重装置1の階段200を上る動作を説明したが、階段200を下る場合は、これら一連の動作の逆の動作を行えばよいため、説明を省略する。
【0042】
本実施の形態の階段揚重装置1は、階段の3段差を利用して昇降するため、安定した搬送が可能である。同時に中段フレーム20の中段前部脚22,23、中段後部脚24,25が棒状であり中段フレーム20の上方に突き出ているため、装置全体の重心位置を低くできる。
【0043】
また、本実施の形態の階段揚重装置1においては、下段移動台10と中段フレーム20と荷台30との平行移動のガイドを断面H型のガイドレール40の両側の凹溝を利用して行わせているため、凹溝内に収容されたローラ31,55が離脱にくく、また多くのガイドレールを必要としない。また、断面H型のガイドレール40は、剛性が高いため、中段フレーム20の撓みや変形を防止する機能を有する。このように、本実施の形態では、円滑で安定した水平移動が行える利点がある。
【0044】
さらに、中段フレーム20の中段前部脚22,23、中段後部脚24,25が棒状の脚であり、これらを軸方向へ駆動するように並列的に配置した中段脚駆動装置61〜64を用いることにより、機械的強度ならびに安全性を向上できる。
【0045】
また、本実施の形態の階段揚重装置1では、水平方向駆動装置70,80を中段フレーム20の内部に収めて配置しているため、装置高さを低く抑えることができ、重心位置を低くできる。このため、装置の安定性を高め、しかもコンパクトな構造とすることができる。
【0046】
(その他の実施の形態)
上述した実施の形態の開示の一部をなす論述および図面はこの発明を限定するものであると理解すべきではない。この開示から当業者には様々な代替実施の形態、実施例および運用技術が明らかとなろう。
【0047】
例えば、下段移動台10や中段フレーム20において脚の取付部付近に応力が集中するため、脚構造が荷重を支える主脚とこれに並列的に駆動装置を設ける構成としてもよい。さらには、主脚を上下方向に駆動する脚を、下段移動台10あるいは中段フレーム20の近傍で支えるために、例えばアングルのような補強材を配した構造したり、脚に対する梁や桁あるいは筋交いを追加した構成としてもよい。
【0048】
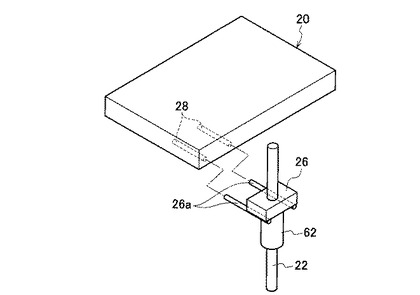
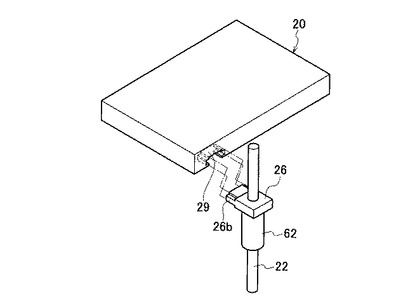
また、図12に示すように、本発明に係る階段揚重装置における中段フレーム20の中段前部脚24を例に示すと、中段脚駆動装置62と中段前部脚24を支持する固定用ブロック26に一対の固定用ロッド26aを突設させ、中段フレーム20側にこれら固定用ロッド26aを嵌合、固定する装着口28を設けた構成としてもよい。なお、中段フレーム20の他の脚も同様である。さらには、図13に示すように、中段脚駆動装置62と中段前部脚24を支持する略直方体状の固定用ブロック26に固定用突部26bを突設させ、中段フレーム20側にこの固定用突部26bを嵌合、固定する装着用凹部29を設けた構成としてもよい。なお、中段フレーム20の他の脚も同様である。
【0049】
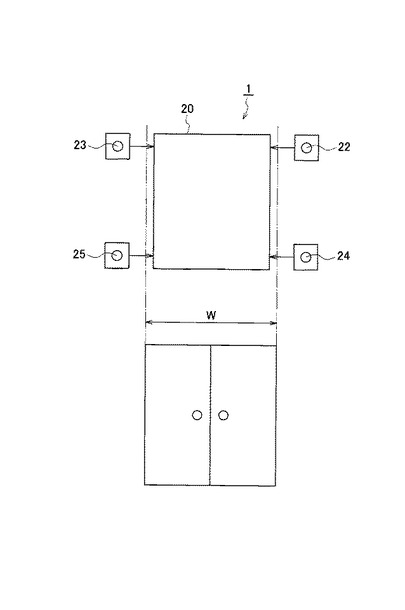
図12もしくは図13に示すように、中段前部脚22,23、中段後部脚24,25およびこれらの中段脚駆動装置61〜64を、中段フレーム20に対して外付けできるようにすることにより、図14に示すように、階段揚重装置1の幅寸法をドアの開口幅Wまで拡大することが可能となる。この結果、階段揚重装置1で幅寸法の大きな重量物も積載可能となる。
【0050】
上述の実施の形態では、階段揚重装置1の中段フレーム20に対してガイドレール40を架設したが、装置の撓み等が発生してもガイドレール40をローラ31,55が円滑に走行できるように、ガイドレール40の固定部に遊び寸法を設定する構成としてもよい。具体的には、中段フレーム20にガイドレール40をボルトナットにより固定する場合には、中段フレーム20側に形成するボルト穴をガイドレール40の延在方向に直交する方向に長い長穴とするなどの構成を挙げることができる。
【0051】
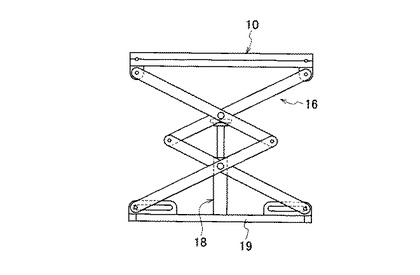
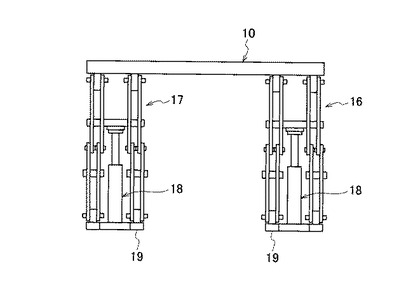
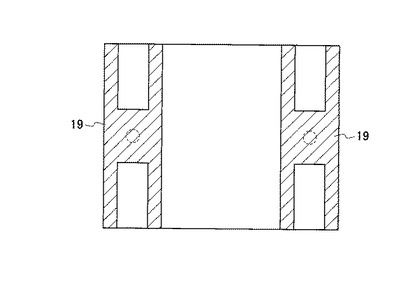
また、上述の実施の形態では、下段移動台10の下段前部脚12,13、下段後部脚14,15は、下段脚駆動装置51〜54により上下軸方向に脚が出没する構成としたが、図15〜図17に示すように、パンタグラフ状の前脚16と後脚17とで構成してもよい。これら前脚16および後脚17は、それぞれ1つの例えば油圧シリンダを備えた駆動装置18を備えていればよいため、駆動系統を簡略化することができる。また、これら前脚16および後脚17の下端部には、図19に示すような接地面積(図中斜線で示す領域の面積)の大きい例えばH形状の底板19を設けてもよい。
【0052】
さらに、上述の実施の形態において、下段移動台10と中段フレーム20との位置関係、中段フレーム20と荷台30との位置関係を、図18(a)に示す、多数の検出穴91が短い間隔で間欠的に開口された検出板92と、この検出板92を挟むように両側に対向配置した図18(b)に示す一対の光電スイッチ93,94とを用いて検出することができる。すなわち、各検出穴91と検出穴91同士の間部との位置情報に基づいて制御動作モードMが設定される構成である。特に、本発明においては、階段の踏み面寸法に柔軟に対応できるように、検出穴91の間隔を細かく設定することが有効である。
【0053】
また、上述の実施の形態では、下段移動台10および中段フレーム20の各脚をそれぞれ独立の駆動装置で出没状態を個々に行ったが、後側の脚を1つの駆動装置で駆動して、前側の脚を左右独立した駆動装置で駆動する構成してもよい。このような構成にすることにより、以下に図19および図20用いて説明するような姿勢制御が可能となる。なお、図19および図20は、説明の便宜上、荷台30を省略するとともに、中段前部脚22,23の中段フレーム20上に突出する部分も省略して示す。
【0054】
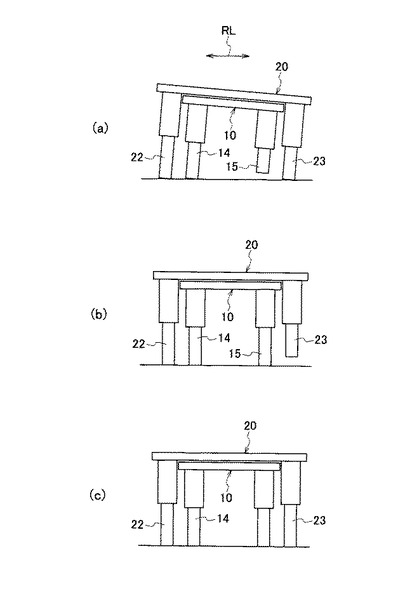
すなわち、図19(a)に示すように、中段フレーム20が左右の一方側(図面では右側)に傾いている場合、図19(b)に示すように、下段移動台10の他方側(図面では左側)を下段後部脚14が伸びるように先に始動させる。そして、下段後部脚14が傾斜分伸びた時点で他方の下段後部脚15の伸びる動作を始動させる。そして、図19(c)のように下段後部脚14,15が同じ速度で伸びていくと、図20(a)に示すように、他方側(左側)の下段後部脚14が先に接地する。そして、図20(b)に示すように、一方側(右側)の下段後部脚15も接地した時点で装置の水平がとれる。このとき、中段フレーム20の中段前部脚23は浮き上がる。その後、中段前部脚23が接地することにより装置全体が安定して水平を保った状態となる。
【0055】
以上、装置の傾斜制御について説明したが、他の制御方法を用いることも当然本発明の適用範囲である。
【図面の簡単な説明】
【0056】
【図1】本発明の実施の形態に係る階段揚重装置の側面図である。
【図2】本発明の実施の形態に係る階段揚重装置の正面図である。
【図3】図1のA−A断面図である。
【図4】本発明の実施の形態に係る階段揚重装置の平面図である。
【図5】本発明の実施の形態に係る階段揚重装置が階段を上る場合の動作を示す側面図である。
【図6】本発明の実施の形態に係る階段揚重装置が階段を上る場合の動作を示す側面図である。
【図7】本発明の実施の形態に係る階段揚重装置が階段を上る場合の動作を示す側面図である。
【図8】本発明の実施の形態に係る階段揚重装置が階段を上る場合の動作を示す側面図である。
【図9】本発明の実施の形態に係る階段揚重装置が階段を上る場合の動作を示す側面図である。
【図10】本発明の実施の形態に係る階段揚重装置が階段を上る場合の動作を示す側面図である。
【図11】本発明の実施の形態に係る階段揚重装置が階段を上る場合の動作を示す側面図である。
【図12】本発明の他の実施の形態に係る階段揚重装置の要部を示す分解斜視図である。
【図13】本発明の他の実施の形態に係る階段揚重装置の要部を示す分解斜視図である。
【図14】本発明の他の実施の形態に係る階段揚重装置の要部を示す平面説明図である。
【図15】本発明のさらに他の実施の形態に係る階段揚重装置の脚を示す正面図である。
【図16】本発明のさらに他の実施の形態に係る階段揚重装置の脚を示す側面図である。
【図17】本発明のさらに他の実施の形態に係る階段揚重装置の脚を示す底面図である。
【図18】(a)は、本発明のさらに他の実施の形態に係る階段揚重装置における位置検出手段を構成する検出板示す説明図、(b)は、検出板と光電スイッチを示す断面図である。
【図19】(a)〜(c)は本発明の階段揚重装置における姿勢制御方法の一例の各工程を示す正面図である。
【図20】(a)〜(c)は本発明の階段揚重装置における姿勢制御方法の一例の各工程を示す正面図である。
【符号の説明】
【0057】
10 下段移動台
12,13 下段前部脚
14,15 下段後部脚
14a,15a 突出脚
20 中段フレーム
22,23 中段前部脚
24,25 中段後部脚
30 荷台
31 ローラ
40 ガイドレール
51,52,53,54 下段駆動装置
55 ローラ
61,62,63,64 中段駆動装置
70,80 水平方向駆動装置
90 制御装置
100 重量物
200 階段
201,202,203 踏み面
【技術分野】
【0001】
本発明は、階段を利用して重量物を運搬する階段揚重装置に関する。
【背景技術】
【0002】
今日、階段はビルなどの高層建築物や駅を始めとして至る処に設置されている。階段を利用して荷物を運搬するニーズは高く、労働力軽減を目的として、各種の階段用運搬ロボットが開発されている。たとえば、荷物運搬用には、特開2004−276892号公報(特許文献1)、特開2002−19616号公報(特許文献2)、特開2002−127909号公報(特許文献3)、特開2002−225720号公報(特許文献4)、特開2001−55178号公報(特許文献5)、特開2001−225754号公報(特許文献6)、特開2001−233600号公報(特許文献7)、特開平10−109653号公報(特許文献8)、特開平9−66839号公報(特許文献9)、特開平8−58641号公報(特許文献10)、また車椅子移動用には特開2004−181040号公報(特許文献11)、特開2002−178930号公報(特許文献12)にそのような荷物運搬用の装置が提案されている。
【0003】
また、移動時の安定性を保つための工夫として特開平8−73197号公報(特許文献13)に見られるようにガイドレールを安定して支持する装置が提案されている。
【0004】
さらに、特開平6−63876号公報(特許文献14)においては、階段などの着地位置が制約される環境を移動するときに、目標位置と実際の着地位置との誤差を検出し歩容(歩幅)を修正する方法が提案されている。また、特開平6−134681号公報(特許文献15)においては、歩行ロボット装置の安定性を増すためにロボット本体に補助脚を設ける方法が提案されている。さらに、階段歩行を目的として2足歩行ロボットも考案され一部は既に公開されている。
【特許文献1】特開2004−276892号公報
【特許文献2】特開2002−19616号公報
【特許文献3】特開2002−127909号公報
【特許文献4】特開2002−225720号公報
【特許文献5】特開2001−55178号公報
【特許文献6】特開2001−225754号公報
【特許文献7】特開2001−233600号公報
【特許文献8】特開平10−109653号公報
【特許文献9】特開平9−66839号公報
【特許文献10】特開平8−58641号公報
【特許文献11】特開2004−181040号公報
【特許文献12】特開2002−178930号公報
【特許文献13】特開平8−73197号公報
【特許文献14】特開平6−63876号公報
【特許文献15】特開平6−134681号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、上記のいずれの従来技術にあっても、数百kgを超える重量物を階段を利用して安全性を確保しながら昇降できる能力を持たせることはできない。また、2足歩行ロボットの場合には、重量物に対する重心の移動が難しく、荷物の運搬には不向きである。
【0006】
本発明は、以上のような従来技術の課題を解決するためになされたもので、重量物の階段揚重作業時の重心位置を低くする構造を採用することにより、重量物の階段揚重を安定して行える階段揚重装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
そこで、本発明は、階段揚重装置であって、前部に上下方向に長さが可変駆動される少なくとも2本の中段前部脚を有し、且つ後部に上下方向に長さが可変駆動される少なくとも2本の中段後部脚を有し、前記中段前部脚の群の最大幅および前記中段後部脚の群の最大幅が、階段の踏み面寸法の2〜3倍の範囲内に設定された中段フレームと、前記中段フレームの下方に配置され、前部に上下方向に長さが可変駆動される少なくとも2本の下段前部脚を有し、且つ後部に上下方向に長さが可変駆動される少なくとも2本の下段後部脚を有すると共に、前記下段前部脚の群の最大幅および前記下段後部脚の群の最大幅が、階段の踏み面寸法の1〜2倍の範囲内に設定され、前記中段フレームの前記中段前部脚と前記中段後部脚との間で水平方向に移動できるように前記中段フレームに連結された下段移動台と、前記中段フレームの上方に配置され、且つ前記中段フレームおよび前記下段移動台に対して水平方向に相対移動できるように連結された、重量物が載置される荷台と、前記中段フレーム、前記下段移動台、および荷台を水平方向に相対移動させる水平駆動装置と、前記中段前部脚、前記中段後部脚、前記下段前部脚、および前記下段後部脚の前記中段フレームもしくは前記下段移動台から下方へ伸びる長さを変化させる垂直駆動装置と、前記水平駆動装置および前記垂直駆動装置を制御する制御装置と、を備え、前記下段前部脚の下端部の上下方向の移動距離をαとしたときに、前記下段後部脚の下端部の上下方向の移動距離が、階段の蹴上げ寸法にαを加えた長さに設定され、前記中段前部脚の上下方向の移動距離が階段の蹴上げ寸法にαを加えた長さに設定されれ、且つ中段後部脚の上下方向の移動距離が、階段の蹴上げ寸法の2倍にαを加えた長さに設定され、前記中段前部脚および前記中段後部脚の上端が、前記中段フレームより上方に位置するように、前記中段前部脚および前記中段後部脚が前記中段フレームを貫通して昇降駆動されることを要旨とする。
【発明の効果】
【0008】
本発明によれば、例えばエレベータ昇降路の上方に位置する機械室への階段を用いた機器の搬入搬出や、階段を用いた荷物搬送において、重心位置を低くすることができ、安全且つ簡便に重量物の移動が可能になる。
【発明を実施するための最良の形態】
【0009】
以下、本発明の実施の形態に係る階段揚重装置の詳細を図面に基づいて説明する。図1は階段揚重装置の側面図、図2は装置を前方から見た正面図、図3は図1のA−A断面図、図4は平面図である。但し、図面は模式的なものであり、各材料層の厚みやその比率などは現実のものとは異なることに留意すべきである。したがって、具体的な厚みや寸法は以下の説明を参酌して判断すべきものである。また、図面相互間においても互いの寸法の関係や比率が異なる部分が含まれている。
【0010】
図1〜図3に示すように、本実施の形態に係る階段揚重装置1は、下段移動台10と、中段フレーム20と、荷台30と、からなる3層構造の装置本体を備えている。本実施の形態において、これら下段移動台10、中段フレーム20、および荷台30は、中段フレーム20に設けられた一対のガイドレール40に沿ってスライド移動可能に連結され、互いに独立して水平一軸方向(図中矢印FRで示す。)に互いに独立して移動することができる。
【0011】
下段移動台10は、長方形状の台板11に、長さが可変とされた複数の脚が取り付けられている。なお、本実施の形態では4本の脚が取り付けられており、台板11の装置進行方向前側の角部に下段前部脚12,13が、台板11の装置後退方向の角部に下段後部脚14,15が取り付けられている。なお、本実施の形態では、下段後部脚14,15が2段のテレスコピック構造となっており、内部に嵌合した状態で更に伸縮動作を行う突出脚14a,15a(図11参照)を備えている。図1〜図3に示すように、これら下段前部脚12,13、下段後部脚14,15の基部には、例えば油圧機構などを利用した垂直駆動装置としての下段脚駆動装置51〜54が順次設けられており、伸縮駆動される。
【0012】
また、中段フレーム20は、下段移動台10の輪郭をなす長方形よりも大きな長方形状の輪郭をなす枠組み体でなる。中段フレーム20は、少なくとも4辺が剛性の高い枠材21で構成されている。中段フレーム20のほぼ四隅に位置する部分には、有効長(枠材21よりも下方に伸びる脚の長さ)が可変とされた複数の脚が取り付けられている。本実施の形態では、中段フレーム20の脚の数が下段移動台10と同様に4本であり、中段前部脚22,23、中段後部脚24,25が取り付けられている。中段前部脚22,23は、階段の蹴上げ寸法(1段分の段差)に、下段前部脚12,13の最大上下移動距離(以下、αという。)を加えた長さよりも長い棒状の脚である。また、中段後部脚24,25は、階段の蹴上げ寸法(1段分の段差)の2倍にαを加えた長さよりも長い棒状の脚である。これら中段移動台20の中段前部脚22,23、中段後部脚24,25は、例えば油圧機構などを利用した中段脚駆動装置61〜64により昇降駆動されて有効長を変化する。
【0013】
なお、下段前部脚12,13、下段後部脚14,15、中段前部脚22,23、中段後部脚24,25の先端(下端)には、各脚が接地したか否かを検出する接地センサが設けていてもよい。
【0014】
中段フレーム20の中間部には、上記した一対のガイドレール40,40が、ほぼ下段移動台10の幅寸法に近似した間隔を隔てて、それぞれ前後方向(矢印FRの方向)に伸びるように架設されている。図3に示すように、このガイドレール40は、鉄道レールと同様の断面H型の鋼材でなり、両側の凹状のガイド溝のうち、一方側のガイド溝に下段移動台10側に設けられたローラ55が転動可能に収納され、他方側のガイド溝に荷台30側のローラ31が転動可能に収納されている。このように、下段移動台10と中段フレーム20との間はローラ55が転動することにより、中段フレーム20と荷台30との間はローラ31が転動することにより、互いに独立して前後方向(矢印FRの方向)に移動可能にしている。
【0015】
上記したように、下段移動台10の脚12〜15は、中段フレーム20の脚22〜25より内側にあり、下段移動台10の全体が中段フレーム20により包み込まれる形をしている。また、下段移動台10と中段フレーム20とはガイドレール40、40の凹溝に収容されたローラ55により互いに離脱することなく保持され、互いに水平方向に独立して移動することができる。同様に、ガイドレール40に対して荷台30側のローラ31も離脱することなく保持された状態で、中段フレーム20と荷台30とが互いに独立して水平移動を可能にしている。したがって、ガイドレール40,40と、これらの凹溝に収容されたローラ31,55により脱輪は防止される。
【0016】
下段脚駆動装置51〜54及び中段脚駆動装置61〜64は、例えば、下段移動台10に取り付けられた各脚12〜15や中段フレーム20に取り付けられた各脚22〜25に対応したインバータ回路と図示しない駆動モータ(油圧モータ)とを有し、制御装置90(図2および図3参照)によってその動作が個別に制御される。すなわち、制御装置90は、下段脚駆動装置51〜54や中段脚駆動装置61〜64の個々の目標駆動力を速度に変換した速度指令信号を、各駆動装置51〜54、61〜64が備えるインバータ回路を介して駆動モータに各々入力することで、各駆動装置51〜54、62〜64の動作を制御する。
【0017】
また、図2および図3に示すように、下段移動台10と中段フレーム20との水平方向の相対移動は下段移動台10に固定された水平方向駆動装置70の駆動によって行われる。また、中段フレーム20には水平方向駆動装置80が具備され、中段フレーム20と荷台30との水平方向の相対移動はこの水平方向駆動装置80の駆動により行われる。これら水平方向駆動装置70や水平方向駆動装置80の動作は、下段脚駆動装置51〜54及び中段脚駆動装置61〜64とともに、制御装置90により制御される。なお、制御装置90は、装置本体に設置する場合には、水平方向駆動装置70又は80の近傍のスペース、例えば、図2および図3に示すような下段移動台10の上の他に、中段フレーム20、荷台30の間の隙間スペースあるいは下段移動台10の下部に設けることができる。しかしながら、この制御装置90は、有線又は無線を介して水平方向駆動装置70、80に接続して使用者が手元で遠隔操作できる構成にすることも可能である。
【0018】
なお、荷台30には、この荷台30のピッチ角とロール角とを検知する図示しない荷台水平度検出器(傾斜角検知手段)が取り付けてある。この荷台水平度検出器は、荷台30の少なくとも2箇所に設置された複数のセンサからなり、これら複数のセンサのうちの1つで荷台30のピッチ角を検知し、他の1つで荷台30のロール角を検知する。なお、荷台30のピッチ角は、荷台30の水平移動方向を基準とした前後の傾斜角であり、荷台30のロール角は、荷台30の水平移動方向を基準とした左右の傾斜角である。また、それぞれの脚の下端から各移動台の底面までの距離、つまり有効長を測定するため、それぞれの脚12〜15、22〜25毎に、図示しない脚伸縮長検出器が取り付けてある。また、水平移動方向の前方側の脚12,13,22,23には、これらの脚が階段と衝突するのを避けるための近接センサあるいはリミットスイッチを用いた図示しない近接検出器が取り付けてある。加えて、必要に応じて、重量物Wに加わる加速度を低減するために適切な場所、例えば荷台30に図示しない加速度検出器を取り付ける。
【0019】
そして、制御装置90には、図示しない水平度検出器や脚12〜15、22〜25毎の図示しない脚伸縮長検出器、前側の脚12,13、22,23のそれぞれが階段と衝突するのを避けるための図示しない近接検出器や、図示しない加速度検出器などからの信号が入力され、これらの信号をもとに脚並びに下段移動台10、中段フレーム20、荷台30のフィードバック制御を行う。
【0020】
特に、本実施の形態では、制御装置90は、下段前部脚12,13、下段後部脚14,15、中段前部脚22,23、および中段後部脚24,25の垂直駆動制御、ならびに下段移動台10と中段フレーム20と荷台30とをそれぞれ互いに独立して水平駆動制御する場合に、所定の時間差をおいて次工程に進む動作制御指令を出すように設定されている。その理由は、下段前部脚12,13、下段後部脚14,15、中段前部脚22,23、および中段後部脚24,25の垂直駆動、ならびに下段移動台10と中段フレーム20と荷台30とを独立に水平駆動をシーケンシャルに行う場合、所定の時間差を置くことにより装置本体が動くことによって生じる機械的振動が減衰した状態から、次の動作を開始することができるためである。この結果、制御によって発生しがちな過渡応答による過大な振動を未然に抑制することが可能になる。
【0021】
下段移動台10の下段前部脚12,13、下段後部脚14,15は、上記したようにテレスコピックな構造となっている。そして、それぞれの脚が、例えば油圧機構を利用した下段脚駆動装置51〜54により上下方向に伸縮してその有効長の調整を可能にしている。これら下段前部脚12,13、下段後部脚14,15ならびに下段脚駆動装置51〜54は、下段移動台10にボルトなどで着脱可能に固定されている。
【0022】
また、上記した水平方向駆動装置70,80は、例えば油圧機構を利用した駆動装置であってもよいし、ボールネジ又はラックとピニオンを用いたサーボ機構、あるいはリニア駆動によるサーボ機構により下段移動台10と中段フレーム20と荷台30とを相対移動させるものであってもよい。
【0023】
なお、下段移動台10の脚間距離は使用する階段の踏み面の幅より大きく、かつ過剰に大きくしないために踏み面の2倍以内の寸法、すなわち階段の踏み面寸法の1〜2倍の範囲内に設定されている。
【0024】
以上、本実施の形態の階段揚重装置1の構成について説明した。この階段揚重装置1によれば、中段フレーム20の中段前部脚22,23と中段後部脚24,25とがテレスコピックな構造を採用せず、中段フレーム20の上方へ突き出る構成であるため、中段フレーム20の下に突出する脚の長さを必要以上に長くする必要が無く、装置全体の重心位置を低くすることができる。このため、本実施の形態の階段揚重装置1では、重量物を荷台30上に重心位置を低く置くことができるため、安定性が良く安全な荷物搬送を行うことができる。
【0025】
また、本実施の形態では、下段前部脚12,13、下段後部脚14,15、中段前部脚22,23、および中段後部脚24,25の垂直駆動制御、ならびに下段移動台10と中段フレーム20と荷台30とをそれぞれ互いに独立して水平駆動制御する場合に、所定の時間差をおいて次工程に進む動作制御指令を出すように設定しているため、所定の時間差を置くことにより装置本体が動くことによって生じる機械的振動が減衰した状態から、次の動作を開始することができ、制御によって発生しがちな過渡応答による過大な振動を未然に抑制する効果がある。
【0026】
以下、図1ならびに図5〜図11を用いて、本実施の形態に係る階段揚重装置1で階段200を利用して重量物100を上階側へ搬送する動作を説明する。
【0027】
(ステップ1)
図1に示すように、下段移動台10、中段フレーム20、荷台30は、下段移動台10と中段フレーム20との間に取り付けられた水平方向駆動装置70、ならびに中段フレーム20と荷台30との間に取り付けられた水平方向駆動装置80により、ほぼ同一の荷台中心線上に固定されている。すなわち、この状態で重量物100は、重心の位置が荷台30あるいは下段移動台10のほぼ中央になるように積載する。
【0028】
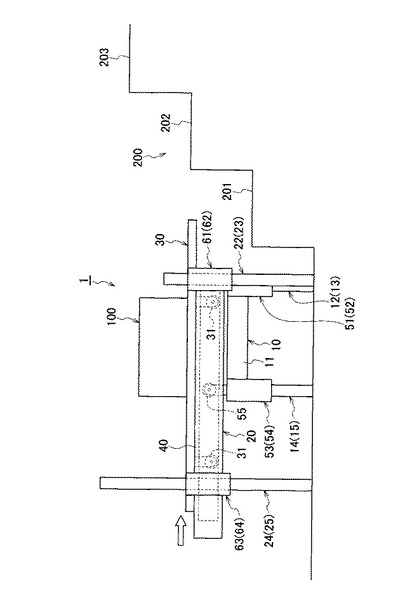
(ステップ2)
上記ステップ1の状態で荷台30の中央に重量物100が積載された状態で、図5に示すように、中段フレーム20の中段前部脚22,23と中段後部脚24,25を用いて荷台30の水平度を保ちながら、下段移動台10の下段前部脚12,13と下段後部脚14,15を下段脚駆動装置51〜54により、予め設定しておいた下段前部脚12,13の最大上下移動距離α縮短させる。このときは、荷台30と接地している中段フレーム20とは中央部分が一致した状態にあるため、荷台30に積載された重量物100は安定した状態にある。
【0029】
なお、本実施の形態では、この工程において下段後部脚14,15もαだけ縮短させている。その後、下段移動台10を水平方向駆動装置70により階段200の方向へ水平移動させる。続いて、下段移動台10の下段脚駆動装置51〜54を作動させて、下段前部脚12,13と下段後部脚14,15を接地させて安定させる。
【0030】
(ステップ3)
次に、図6に示すように、水平方向駆動装置80によって、荷台30を階段進行方向に第1段目の踏み面201の長さに合わせて水平移動させる。なお、荷台30の移動後の重量物100の重心位置は、下段移動台10の下段前部脚12,13と下段後部脚14,15で保持される安定範囲内に収まるように水平移動の制御がなされる。
【0031】
(ステップ4)
次に、図7に示すように、中段フレーム20の中段脚駆動装置61〜64を駆動して脚の有効長を縮短させる。具体的には、中段前部脚22,23についてはその下端が階段200の蹴上げの高さよりも少し高くなるまで縮め、中段後部脚24,25については水平移動で床面や踏み面と干渉しなくなる分だけ縮める。続いて、荷台30ならびに下段移動台10を位置固定したまま中段フレーム20のみを階段200の第1段目の踏み面201の長さまで水平方向駆動装置70,80により水平移動させる。すなわち、荷台30は、下段移動台10と中段フレーム20との間に取り付けられた水平方向駆動装置70と、中段フレーム20と荷台30との間に取り付けられた水平方向駆動装置80と、を同時に逆方向に駆動することにより、重量物100の位置を変えることなく中段フレーム20のみを水平移動させる。
【0032】
この際、下段移動台10と中段フレーム20と荷台30とは、ガイドレール40と、これを転動するローラ31,55とによって、互いに逆方向への水平移動をガイドされる。
【0033】
中段フレーム20の水平移動が完了した後、中段フレーム20の中段前部脚22,23、中段後部脚24,25を中段脚駆動装置61〜64を用いて降下させて着地させて安定させる。
【0034】
(ステップ5)
次に、図8に示すように、中段フレーム20をガイドとして利用しながら階段200の第1段目の踏み面201相当の距離分だけ、荷台30を水平方向駆動装置80により進行方向へ水平移動させる。
【0035】
(ステップ6)
次に、図9に示すように、荷台30の水平度を確認しながら、中段フレーム20の脚の有効長を中段脚駆動装置61〜64により伸張させ重量物100ならびに下段移動台10とともに装置全体を階段200の蹴上げ相当分の距離だけ持ち上げる。
【0036】
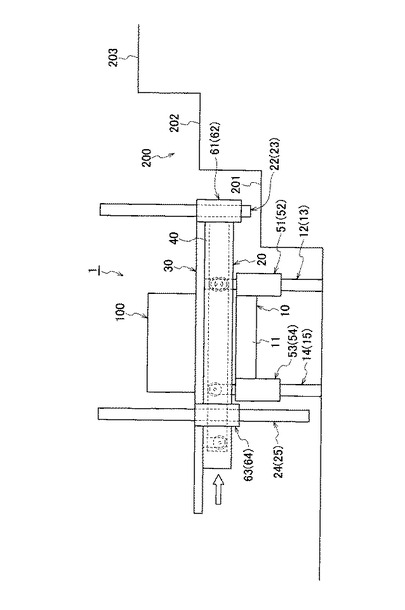
(ステップ7)
次に、図10に示すように、下段移動台10を水平方向駆動装置70により進行方向へ踏み面201の長さ相当分だけ移動させる。
【0037】
(ステップ8)
図11に示すように、下段移動台10の下段前部脚12,13、下段後部脚14,15を下段脚駆動装置51〜54により着地させて安定化させる。このとき、下段後部脚14,15はテレスコピック構造として内部に嵌合されている突出脚14a,15aを突出させて着地させる。このように下段移動台10の下段後部脚14,15をテレスコピック構造としたことにより、突出脚14a,15aを突出させな状態での下段移動台10の高さを低くすることができ、結果として階段揚重装置1全体の重心位置を低くできる。
【0038】
(ステップ9)
次に、中段フレーム20の中段前部脚22,23、中段後部脚24,25を縮短させた後、下段移動台10をガイドとして中段フレーム20を階段200の第2段目の踏み面202相当の距離分だけ水平方向駆動装置70により水平移動させる。
【0039】
上記したステップ1〜9の動作を1サイクルとする揚重動作を階段揚重装置1に行わせることにより、階段200を上ることができる。
【0040】
なお、本実施の形態では、次ステップに移行する際に所定の時間差を置いている。このように所定時間差を置くことにより、装置本体が動くことによって生じる機械的振動が減衰した状態から、次の動作を開始することができ、制御によって発生しがちな過渡応答による過大な振動を未然に抑制できる。
【0041】
以上、階段揚重装置1の階段200を上る動作を説明したが、階段200を下る場合は、これら一連の動作の逆の動作を行えばよいため、説明を省略する。
【0042】
本実施の形態の階段揚重装置1は、階段の3段差を利用して昇降するため、安定した搬送が可能である。同時に中段フレーム20の中段前部脚22,23、中段後部脚24,25が棒状であり中段フレーム20の上方に突き出ているため、装置全体の重心位置を低くできる。
【0043】
また、本実施の形態の階段揚重装置1においては、下段移動台10と中段フレーム20と荷台30との平行移動のガイドを断面H型のガイドレール40の両側の凹溝を利用して行わせているため、凹溝内に収容されたローラ31,55が離脱にくく、また多くのガイドレールを必要としない。また、断面H型のガイドレール40は、剛性が高いため、中段フレーム20の撓みや変形を防止する機能を有する。このように、本実施の形態では、円滑で安定した水平移動が行える利点がある。
【0044】
さらに、中段フレーム20の中段前部脚22,23、中段後部脚24,25が棒状の脚であり、これらを軸方向へ駆動するように並列的に配置した中段脚駆動装置61〜64を用いることにより、機械的強度ならびに安全性を向上できる。
【0045】
また、本実施の形態の階段揚重装置1では、水平方向駆動装置70,80を中段フレーム20の内部に収めて配置しているため、装置高さを低く抑えることができ、重心位置を低くできる。このため、装置の安定性を高め、しかもコンパクトな構造とすることができる。
【0046】
(その他の実施の形態)
上述した実施の形態の開示の一部をなす論述および図面はこの発明を限定するものであると理解すべきではない。この開示から当業者には様々な代替実施の形態、実施例および運用技術が明らかとなろう。
【0047】
例えば、下段移動台10や中段フレーム20において脚の取付部付近に応力が集中するため、脚構造が荷重を支える主脚とこれに並列的に駆動装置を設ける構成としてもよい。さらには、主脚を上下方向に駆動する脚を、下段移動台10あるいは中段フレーム20の近傍で支えるために、例えばアングルのような補強材を配した構造したり、脚に対する梁や桁あるいは筋交いを追加した構成としてもよい。
【0048】
また、図12に示すように、本発明に係る階段揚重装置における中段フレーム20の中段前部脚24を例に示すと、中段脚駆動装置62と中段前部脚24を支持する固定用ブロック26に一対の固定用ロッド26aを突設させ、中段フレーム20側にこれら固定用ロッド26aを嵌合、固定する装着口28を設けた構成としてもよい。なお、中段フレーム20の他の脚も同様である。さらには、図13に示すように、中段脚駆動装置62と中段前部脚24を支持する略直方体状の固定用ブロック26に固定用突部26bを突設させ、中段フレーム20側にこの固定用突部26bを嵌合、固定する装着用凹部29を設けた構成としてもよい。なお、中段フレーム20の他の脚も同様である。
【0049】
図12もしくは図13に示すように、中段前部脚22,23、中段後部脚24,25およびこれらの中段脚駆動装置61〜64を、中段フレーム20に対して外付けできるようにすることにより、図14に示すように、階段揚重装置1の幅寸法をドアの開口幅Wまで拡大することが可能となる。この結果、階段揚重装置1で幅寸法の大きな重量物も積載可能となる。
【0050】
上述の実施の形態では、階段揚重装置1の中段フレーム20に対してガイドレール40を架設したが、装置の撓み等が発生してもガイドレール40をローラ31,55が円滑に走行できるように、ガイドレール40の固定部に遊び寸法を設定する構成としてもよい。具体的には、中段フレーム20にガイドレール40をボルトナットにより固定する場合には、中段フレーム20側に形成するボルト穴をガイドレール40の延在方向に直交する方向に長い長穴とするなどの構成を挙げることができる。
【0051】
また、上述の実施の形態では、下段移動台10の下段前部脚12,13、下段後部脚14,15は、下段脚駆動装置51〜54により上下軸方向に脚が出没する構成としたが、図15〜図17に示すように、パンタグラフ状の前脚16と後脚17とで構成してもよい。これら前脚16および後脚17は、それぞれ1つの例えば油圧シリンダを備えた駆動装置18を備えていればよいため、駆動系統を簡略化することができる。また、これら前脚16および後脚17の下端部には、図19に示すような接地面積(図中斜線で示す領域の面積)の大きい例えばH形状の底板19を設けてもよい。
【0052】
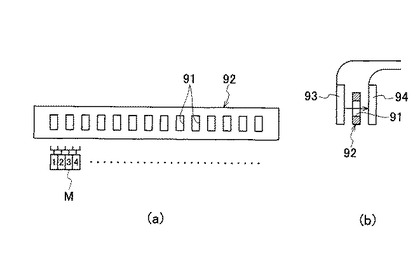
さらに、上述の実施の形態において、下段移動台10と中段フレーム20との位置関係、中段フレーム20と荷台30との位置関係を、図18(a)に示す、多数の検出穴91が短い間隔で間欠的に開口された検出板92と、この検出板92を挟むように両側に対向配置した図18(b)に示す一対の光電スイッチ93,94とを用いて検出することができる。すなわち、各検出穴91と検出穴91同士の間部との位置情報に基づいて制御動作モードMが設定される構成である。特に、本発明においては、階段の踏み面寸法に柔軟に対応できるように、検出穴91の間隔を細かく設定することが有効である。
【0053】
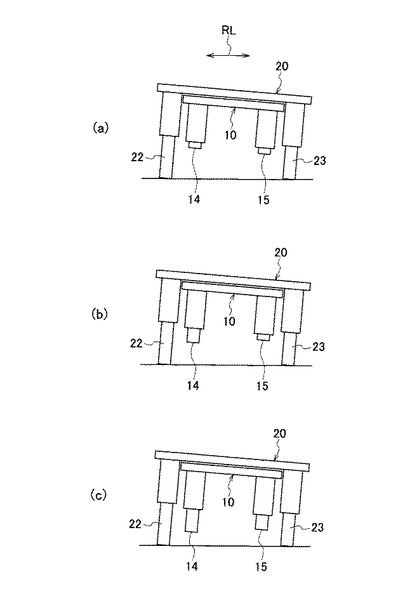
また、上述の実施の形態では、下段移動台10および中段フレーム20の各脚をそれぞれ独立の駆動装置で出没状態を個々に行ったが、後側の脚を1つの駆動装置で駆動して、前側の脚を左右独立した駆動装置で駆動する構成してもよい。このような構成にすることにより、以下に図19および図20用いて説明するような姿勢制御が可能となる。なお、図19および図20は、説明の便宜上、荷台30を省略するとともに、中段前部脚22,23の中段フレーム20上に突出する部分も省略して示す。
【0054】
すなわち、図19(a)に示すように、中段フレーム20が左右の一方側(図面では右側)に傾いている場合、図19(b)に示すように、下段移動台10の他方側(図面では左側)を下段後部脚14が伸びるように先に始動させる。そして、下段後部脚14が傾斜分伸びた時点で他方の下段後部脚15の伸びる動作を始動させる。そして、図19(c)のように下段後部脚14,15が同じ速度で伸びていくと、図20(a)に示すように、他方側(左側)の下段後部脚14が先に接地する。そして、図20(b)に示すように、一方側(右側)の下段後部脚15も接地した時点で装置の水平がとれる。このとき、中段フレーム20の中段前部脚23は浮き上がる。その後、中段前部脚23が接地することにより装置全体が安定して水平を保った状態となる。
【0055】
以上、装置の傾斜制御について説明したが、他の制御方法を用いることも当然本発明の適用範囲である。
【図面の簡単な説明】
【0056】
【図1】本発明の実施の形態に係る階段揚重装置の側面図である。
【図2】本発明の実施の形態に係る階段揚重装置の正面図である。
【図3】図1のA−A断面図である。
【図4】本発明の実施の形態に係る階段揚重装置の平面図である。
【図5】本発明の実施の形態に係る階段揚重装置が階段を上る場合の動作を示す側面図である。
【図6】本発明の実施の形態に係る階段揚重装置が階段を上る場合の動作を示す側面図である。
【図7】本発明の実施の形態に係る階段揚重装置が階段を上る場合の動作を示す側面図である。
【図8】本発明の実施の形態に係る階段揚重装置が階段を上る場合の動作を示す側面図である。
【図9】本発明の実施の形態に係る階段揚重装置が階段を上る場合の動作を示す側面図である。
【図10】本発明の実施の形態に係る階段揚重装置が階段を上る場合の動作を示す側面図である。
【図11】本発明の実施の形態に係る階段揚重装置が階段を上る場合の動作を示す側面図である。
【図12】本発明の他の実施の形態に係る階段揚重装置の要部を示す分解斜視図である。
【図13】本発明の他の実施の形態に係る階段揚重装置の要部を示す分解斜視図である。
【図14】本発明の他の実施の形態に係る階段揚重装置の要部を示す平面説明図である。
【図15】本発明のさらに他の実施の形態に係る階段揚重装置の脚を示す正面図である。
【図16】本発明のさらに他の実施の形態に係る階段揚重装置の脚を示す側面図である。
【図17】本発明のさらに他の実施の形態に係る階段揚重装置の脚を示す底面図である。
【図18】(a)は、本発明のさらに他の実施の形態に係る階段揚重装置における位置検出手段を構成する検出板示す説明図、(b)は、検出板と光電スイッチを示す断面図である。
【図19】(a)〜(c)は本発明の階段揚重装置における姿勢制御方法の一例の各工程を示す正面図である。
【図20】(a)〜(c)は本発明の階段揚重装置における姿勢制御方法の一例の各工程を示す正面図である。
【符号の説明】
【0057】
10 下段移動台
12,13 下段前部脚
14,15 下段後部脚
14a,15a 突出脚
20 中段フレーム
22,23 中段前部脚
24,25 中段後部脚
30 荷台
31 ローラ
40 ガイドレール
51,52,53,54 下段駆動装置
55 ローラ
61,62,63,64 中段駆動装置
70,80 水平方向駆動装置
90 制御装置
100 重量物
200 階段
201,202,203 踏み面
【特許請求の範囲】
【請求項1】
前部に上下方向に長さが可変駆動される少なくとも2本の中段前部脚を有し、且つ後部に上下方向に長さが可変駆動される少なくとも2本の中段後部脚を有し、前記中段前部脚の群の最大幅および前記中段後部脚の群の最大幅が、階段の踏み面寸法の2〜3倍の範囲内に設定された中段フレームと、
前記中段フレームの下方に配置され、前部に上下方向に長さが可変駆動される少なくとも2本の下段前部脚を有し、且つ後部に上下方向に長さが可変駆動される少なくとも2本の下段後部脚を有すると共に、前記下段前部脚の群の最大幅および前記下段後部脚の群の最大幅が、階段の踏み面寸法の1〜2倍の範囲内に設定され、前記中段フレームの前記中段前部脚と前記中段後部脚との間で水平方向に移動できるように前記中段フレームに連結された下段移動台と、
前記中段フレームの上方に配置され、且つ前記中段フレームおよび前記下段移動台に対して水平方向に相対移動できるように連結された、重量物が載置される荷台と、
前記中段フレーム、前記下段移動台、および荷台を水平方向に相対移動させる水平駆動装置と、
前記中段前部脚、前記中段後部脚、前記下段前部脚、および前記下段後部脚の前記中段フレームもしくは前記下段移動台から下方へ伸びる長さを変化させる垂直駆動装置と、
前記水平駆動装置および前記垂直駆動装置を制御する制御装置と、
を備え、
前記下段前部脚の下端部の上下方向の移動距離をαとしたときに、前記下段後部脚の下端部の上下方向の移動距離が、階段の蹴上げ寸法にαを加えた長さに設定され、
前記中段前部脚の上下方向の移動距離が階段の蹴上げ寸法にαを加えた長さに設定されれ、且つ中段後部脚の上下方向の移動距離が、階段の蹴上げ寸法の2倍にαを加えた長さに設定され、
前記中段前部脚および前記中段後部脚の上端が、前記中段フレームより上方に位置するように、前記中段前部脚および前記中段後部脚が前記中段フレームを貫通して昇降駆動されることを特徴とする階段揚重装置。
【請求項2】
前記下段移動台と前記中段フレームとの間、および前記中段フレームと前記荷台との間に、それぞれ独立して階段の進行方向に水平移動可能とするスライド機構を備えることを特徴とする請求項1記載の階段揚重装置。
【請求項3】
前記スライド機構は、前記中段フレームの前部と後部との間に亘って前後方法に沿って延在されたスライドレールと、前記下段移動台に設けられて前記スライドレールを離脱不能に走行する下段側回転走行体と、前記荷台に設けられて前記スライドレールを離脱不能に走行する荷台側回転走行体と、を備え、
前記水平駆動装置は、前記下段移動台と前記中段フレームと前記荷台とをそれぞれ互いに独立し移動させる2つの水平駆動装置でなり、
一方の前記水平駆動装置は前記下段移動台と前記中段フレームとの間に設けられ、他方の前記水平駆動装置は前記中段フレームと前記荷台との間に設けられていることを特徴とする請求項2記載の階段揚重装置。
【請求項4】
前記スライドレールは、前記中段フレームの幅方向に間隔を隔てて平行に延在された一対からなることを特徴とする請求項3記載の階段揚重装置。
【請求項5】
前記垂直駆動装置は、複数の前記下段後部脚の群および複数の前記中段後部脚の群は、それぞれの群毎に1つ備えられ、前記下段前部脚および前記中段前部脚はそれぞれの脚毎に独立して備えられ、前記下段後部脚もしくは前記中段前部脚の長さを任意に設定可能としたことを特徴とする請求項1記載の階段揚重装置。
【請求項6】
前記下段後部脚は、伸縮して出没するテレスコピックな構造であることを特徴とする請求項1記載の階段揚重装置。
【請求項7】
前記制御装置は、前記下段前部脚、前記下段後部脚、前記中段前部脚、および前記中段後部脚の垂直駆動制御、ならびに前記下段移動台と前記中段フレームと前記荷台とをそれぞれ互いに独立して水平駆動制御する場合に、所定の時間差をおいて次工程に進む動作制御指令を出すように設定されていることを特徴とする請求項1記載の階段揚重装置。
【請求項8】
前記中段前部脚および前記中段後部脚もしくはこれらの前記垂直駆動装置は、中段フレームの側部に外付けできるように着脱可能に設けられていることを特徴とする請求項1記載の階段揚重装置。
【請求項9】
前記中段前部脚と前記中段後部脚の全部が着地している場合は、水平制御を行わないことを特徴とする請求項1記載の階段揚重装置。
【請求項10】
前記荷台と前記中段フレームとの間のスライド機構には、遊びが設定されていることを特徴とする請求項2乃至請求項4のいずれか一項に記載された階段揚重装置。
【請求項11】
前記下段移動台と前記中段フレームとの間、前記中段フレームと前記荷台との間には、スライド方向に沿って間欠的に光透過部が形成された位置検出用板が配置され、前記下段移動台と前記中段フレームのうちの一方、および前記中段フレームと前記荷台のうちの一方に、前記位置検出用板を挟むように一対の位置検出用センサが設けられていることを特徴とする請求項1記載の階段揚重装置。
【請求項12】
階段の両側もしくは片側に進行方向に沿って設けられたガイド基準線に従って、進行方向を決定することを特徴とする請求項1記載の階段揚重装置。
【請求項1】
前部に上下方向に長さが可変駆動される少なくとも2本の中段前部脚を有し、且つ後部に上下方向に長さが可変駆動される少なくとも2本の中段後部脚を有し、前記中段前部脚の群の最大幅および前記中段後部脚の群の最大幅が、階段の踏み面寸法の2〜3倍の範囲内に設定された中段フレームと、
前記中段フレームの下方に配置され、前部に上下方向に長さが可変駆動される少なくとも2本の下段前部脚を有し、且つ後部に上下方向に長さが可変駆動される少なくとも2本の下段後部脚を有すると共に、前記下段前部脚の群の最大幅および前記下段後部脚の群の最大幅が、階段の踏み面寸法の1〜2倍の範囲内に設定され、前記中段フレームの前記中段前部脚と前記中段後部脚との間で水平方向に移動できるように前記中段フレームに連結された下段移動台と、
前記中段フレームの上方に配置され、且つ前記中段フレームおよび前記下段移動台に対して水平方向に相対移動できるように連結された、重量物が載置される荷台と、
前記中段フレーム、前記下段移動台、および荷台を水平方向に相対移動させる水平駆動装置と、
前記中段前部脚、前記中段後部脚、前記下段前部脚、および前記下段後部脚の前記中段フレームもしくは前記下段移動台から下方へ伸びる長さを変化させる垂直駆動装置と、
前記水平駆動装置および前記垂直駆動装置を制御する制御装置と、
を備え、
前記下段前部脚の下端部の上下方向の移動距離をαとしたときに、前記下段後部脚の下端部の上下方向の移動距離が、階段の蹴上げ寸法にαを加えた長さに設定され、
前記中段前部脚の上下方向の移動距離が階段の蹴上げ寸法にαを加えた長さに設定されれ、且つ中段後部脚の上下方向の移動距離が、階段の蹴上げ寸法の2倍にαを加えた長さに設定され、
前記中段前部脚および前記中段後部脚の上端が、前記中段フレームより上方に位置するように、前記中段前部脚および前記中段後部脚が前記中段フレームを貫通して昇降駆動されることを特徴とする階段揚重装置。
【請求項2】
前記下段移動台と前記中段フレームとの間、および前記中段フレームと前記荷台との間に、それぞれ独立して階段の進行方向に水平移動可能とするスライド機構を備えることを特徴とする請求項1記載の階段揚重装置。
【請求項3】
前記スライド機構は、前記中段フレームの前部と後部との間に亘って前後方法に沿って延在されたスライドレールと、前記下段移動台に設けられて前記スライドレールを離脱不能に走行する下段側回転走行体と、前記荷台に設けられて前記スライドレールを離脱不能に走行する荷台側回転走行体と、を備え、
前記水平駆動装置は、前記下段移動台と前記中段フレームと前記荷台とをそれぞれ互いに独立し移動させる2つの水平駆動装置でなり、
一方の前記水平駆動装置は前記下段移動台と前記中段フレームとの間に設けられ、他方の前記水平駆動装置は前記中段フレームと前記荷台との間に設けられていることを特徴とする請求項2記載の階段揚重装置。
【請求項4】
前記スライドレールは、前記中段フレームの幅方向に間隔を隔てて平行に延在された一対からなることを特徴とする請求項3記載の階段揚重装置。
【請求項5】
前記垂直駆動装置は、複数の前記下段後部脚の群および複数の前記中段後部脚の群は、それぞれの群毎に1つ備えられ、前記下段前部脚および前記中段前部脚はそれぞれの脚毎に独立して備えられ、前記下段後部脚もしくは前記中段前部脚の長さを任意に設定可能としたことを特徴とする請求項1記載の階段揚重装置。
【請求項6】
前記下段後部脚は、伸縮して出没するテレスコピックな構造であることを特徴とする請求項1記載の階段揚重装置。
【請求項7】
前記制御装置は、前記下段前部脚、前記下段後部脚、前記中段前部脚、および前記中段後部脚の垂直駆動制御、ならびに前記下段移動台と前記中段フレームと前記荷台とをそれぞれ互いに独立して水平駆動制御する場合に、所定の時間差をおいて次工程に進む動作制御指令を出すように設定されていることを特徴とする請求項1記載の階段揚重装置。
【請求項8】
前記中段前部脚および前記中段後部脚もしくはこれらの前記垂直駆動装置は、中段フレームの側部に外付けできるように着脱可能に設けられていることを特徴とする請求項1記載の階段揚重装置。
【請求項9】
前記中段前部脚と前記中段後部脚の全部が着地している場合は、水平制御を行わないことを特徴とする請求項1記載の階段揚重装置。
【請求項10】
前記荷台と前記中段フレームとの間のスライド機構には、遊びが設定されていることを特徴とする請求項2乃至請求項4のいずれか一項に記載された階段揚重装置。
【請求項11】
前記下段移動台と前記中段フレームとの間、前記中段フレームと前記荷台との間には、スライド方向に沿って間欠的に光透過部が形成された位置検出用板が配置され、前記下段移動台と前記中段フレームのうちの一方、および前記中段フレームと前記荷台のうちの一方に、前記位置検出用板を挟むように一対の位置検出用センサが設けられていることを特徴とする請求項1記載の階段揚重装置。
【請求項12】
階段の両側もしくは片側に進行方向に沿って設けられたガイド基準線に従って、進行方向を決定することを特徴とする請求項1記載の階段揚重装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【公開番号】特開2008−247577(P2008−247577A)
【公開日】平成20年10月16日(2008.10.16)
【国際特許分類】
【出願番号】特願2007−93315(P2007−93315)
【出願日】平成19年3月30日(2007.3.30)
【出願人】(504174135)国立大学法人九州工業大学 (489)
【出願人】(390025265)東芝エレベータ株式会社 (2,543)
【公開日】平成20年10月16日(2008.10.16)
【国際特許分類】
【出願日】平成19年3月30日(2007.3.30)
【出願人】(504174135)国立大学法人九州工業大学 (489)
【出願人】(390025265)東芝エレベータ株式会社 (2,543)
[ Back to top ]