
階段昇降装置
【課題】よりコンパクトな階段昇降装置を提供すること。
【解決手段】階段で被昇降物を昇降させる階段昇降装置は、鉛直方向に伸縮する第一リンク機構ST1と、水平方向に伸縮する第二リンク機構ST2と、第一リンク機構ST1の一方の側に接続される足S1と、を備え、第二リンク機構ST2の一方の側は、第一リンク機構ST1の他方の側に接続され、被昇降物は、第二リンク機構ST2の他方の側で支持される。
【解決手段】階段で被昇降物を昇降させる階段昇降装置は、鉛直方向に伸縮する第一リンク機構ST1と、水平方向に伸縮する第二リンク機構ST2と、第一リンク機構ST1の一方の側に接続される足S1と、を備え、第二リンク機構ST2の一方の側は、第一リンク機構ST1の他方の側に接続され、被昇降物は、第二リンク機構ST2の他方の側で支持される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、階段で被昇降物を昇降させる階段昇降装置に関する。
【背景技術】
【0002】
従来、階段昇降機能を有するフォークリフトが知られている(例えば、特許文献1参照。)。
【0003】
このフォークリフトは、フレームに対してフォーク荷台を上下させる駆動部と、フレームに対して折り畳み可能に取り付けられたフレーム補助脚を伸縮させる駆動部と、フォーク荷台に対して折り畳み可能に取り付けられた前部フォーク補助脚を伸縮させる駆動部と、フレーム補助脚、前部フォーク補助脚、後部フォーク補助脚のそれぞれの先端に取り付けられた補助輪を回転させる駆動部とを用いて、階段を昇降する。
【先行技術文献】
【非特許文献】
【0004】
【特許文献1】実開平6−025294号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1のフォークリフトは、階段の昇降のための機構が複雑であるため、構造の大型化が避けられないという問題がある。
【0006】
上述の問題に鑑み、本発明は、よりコンパクトな階段昇降装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上述の目的を達成するために、本発明の実施例に係る階段昇降装置は、階段で被昇降物を昇降させる階段昇降装置であって、鉛直方向に伸縮する第一リンク機構と、水平方向に伸縮する第二リンク機構と、前記第一リンク機構の一方の側に接続される足と、を備え、前記第二リンク機構の一方の側は、前記第一リンク機構の他方の側に接続され、前記被昇降物は、前記第二リンク機構の他方の側で支持されることを特徴とする。
【発明の効果】
【0008】
上述の手段により、本発明は、よりコンパクトな階段昇降装置を提供することができる。
【図面の簡単な説明】
【0009】
【図1】本発明に係る階段昇降装置の概略側面図である。
【図2】本発明の第一実施例に係る階段昇降装置の背面斜視図である。
【図3】本発明の第一実施例に係る階段昇降装置の背面図である。
【図4】本発明の第一実施例に係る階段昇降装置の前面斜視図である。
【図5】本発明の第一実施例に係る階段昇降装置の上面図である。
【図6】本発明の第一実施例に係る階段昇降装置の左側面図である。
【図7】支持多角形の説明図である。
【図8】図3の破線領域VIIIに対応する図である。
【図9】図6の破線領域IXに対応する図である。
【図10】第一実施例において第一リンク機構又は第二リンク機構を伸縮させるときの第一電磁ブレーキ、第二電磁ブレーキ、及び第三電磁ブレーキの目標動作状態を示す表である。
【図11】階段昇降装置の機能ブロック図である。
【図12】本発明の第一実施例に係る階段昇降装置が階段で被昇降物を昇降させる動作を説明する図である。
【図13】本発明の第二実施例に係る階段昇降装置の背面斜視図である。
【図14】本発明の第二実施例に係る階段昇降装置の背面図である。
【図15】本発明の第二実施例に係る階段昇降装置の前面斜視図である。
【図16】本発明の第二実施例に係る階段昇降装置の上面図である。
【図17】本発明の第二実施例に係る階段昇降装置の左側面図である。
【図18】図14の破線領域XVIIIに対応する図である。
【図19】第二実施例において第一リンク機構又は第二リンク機構を伸縮させるときの第一電磁ブレーキ、第二電磁ブレーキ、及び第三電磁ブレーキ、並びに、第一電磁石プーリ〜第六電磁力プーリの目標動作状態を示す表である。
【発明を実施するための形態】
【0010】
以下、図面を参照しつつ、本発明の実施例について説明する。
【0011】
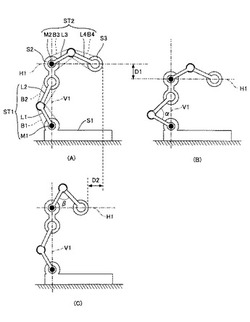
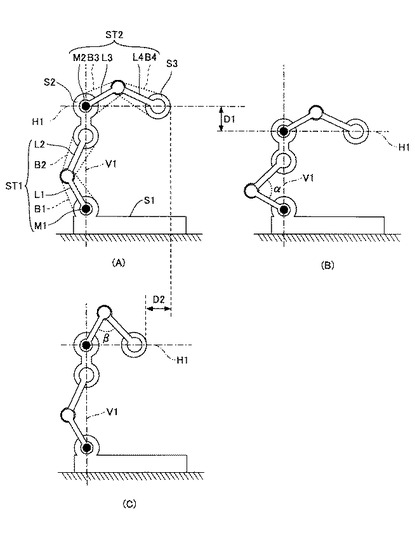
図1は、本発明に係る階段昇降装置の概略側面図である。階段昇降装置は、階段で被昇降物(図示せず。)を昇降させる装置である。階段昇降装置は、主に、第一支持部S1、第二支持部S2、第三支持部S3、第一リンク機構ST1、第二リンク機構ST2で構成される。なお、図1(A)は、第一リンク機構ST1及び第二リンク機構ST2を伸ばした状態を示し、図1(B)は、第二リンク機構ST2を伸ばしたまま第一リンク機構ST1を縮めた状態を示し、図1(C)は、第一リンク機構ST1を伸ばしたまま第二リンク機構ST2を縮めた状態を示す。
【0012】
第一支持部S1は、第一リンク機構ST1を支持する部材であり、第二支持部S2は、第二リンク機構ST2を支持する部材であり、第三支持部S3は、被昇降物(図示せず。)を支持する部材である。なお、被昇降物は、例えば、第三支持部S3の上面、下面、側面の何れかにボルト等を用いて締め付けられたものであってもよく、第三支持部S3の上面に載せられたものであってもよい。
【0013】
第一リンク機構ST1は、回転関節を利用して鉛直軸V1方向に伸縮する直動機構であり、主に、第一電動モータM1、第一リンクL1、第二リンクL2、第一ベルトB1、及び第二ベルトB2で構成される。
【0014】
第二リンク機構ST2は、回転関節を利用して水平軸V1方向に伸縮する直動機構であり、主に、第二電動モータM2、第三リンクL3、第四リンクL4、第三ベルトB3、及び第四ベルトB4で構成される。
【0015】
図1(A)及び図1(B)で示すように、第一リンク機構ST1は、第一モータM1の駆動軸が第一方向に回転すると、第一リンクL1と第二リンクL2との間の角度αが小さくなるように、第一リンクL1及び第二リンクL2を動作させる。この場合、第一リンク機構ST1は、図1(A)の状態に比べて、第三支持部S3の位置、すなわち被昇降物の位置を、図1(B)に示すように、距離D1だけ下方に移動させることができる。
【0016】
また、第一リンク機構ST1は、第一モータM1の駆動軸が第一方向とは逆の第二方向に回転すると、第一リンクL1と第二リンクL2との間の角度αが大きくなるように、第一リンクL1及び第二リンクL2を動作させる。この場合、第一リンク機構ST1は、図1(B)の状態に比べて、第三支持部S3の位置、すなわち被昇降物の位置を、図1(A)に示すように、距離D1だけ上方に移動させることができる。
【0017】
なお、明瞭化のため、図1(B)では第一ベルトB1及び第二ベルトB2の図示が省略されている。
【0018】
同様に、図1(A)及び図1(C)で示すように、第二リンク機構ST2は、第二モータM2の駆動軸が第一方向に回転すると、第三リンクL3と第四リンクL4との間の角度βが小さくなるように、第三リンクL3及び第四リンクL4を動作させる。この場合、第二リンク機構ST2は、図1(A)の状態に比べて、第三支持部S3の位置、すなわち被昇降物の位置を、図1(C)に示すように、距離D2だけ左方に移動させることができる。
【0019】
また、第二リンク機構ST2は、第二モータM2の駆動軸が第一方向とは逆の第二方向に回転すると、第三リンクL3と第四リンクL4との間の角度βが大きくなるように、第三リンクL3及び第四リンクL4を動作させる。この場合、第二リンク機構ST2は、図1(C)の状態に比べて、第三支持部S3の位置、すなわち被昇降物の位置を、図1(A)に示すように、距離D2だけ右方に移動させることができる。
【0020】
なお、明瞭化のため、図1(C)では第一ベルトB1及び第二ベルトB2の図示が省略されている。
【0021】
以上の構成により、階段昇降装置は、二つの電動モータM1、M2を用いて、第一リンク機構ST1及び第二リンク機構ST2のそれぞれを独立して動作させ、被昇降物の位置を上下及び前後に移動させながら、階段で被昇降物を昇降させることができる。このように、階段昇降装置は、コンパクトな構成を採用しながらも、階段で被昇降物を昇降させることができる。
【0022】
また、階段昇降装置は、回転関節を利用した直動機構を採用するため、レールを利用したスライド機構やピニオン・ラック機構等に比べ、全体構成をよりコンパクトにすることができる。
【0023】
以下では、より具体的な実施例を参照しながら、本発明に係る階段昇降装置の詳細について説明する。特に、以下の二つの実施例は、電動モータを二つ用いて二つのリンク機構のそれぞれを独立して動作させる代わりに、二つの電動モータのそれぞれの機能を兼ねる一つの電動モータとその電動モータの駆動力の伝達先を切り替える切り替え機構とを用いて二つのリンク機構のそれぞれを順番に動作させる。但し、以下の二つの実施例は、二つの電動モータを用いる態様を除外するものではなく、一つの電動モータと切り替え機構とを用いる代わりに、切り替え機構を省略しながら二つの電動モータを用いる態様を採用してもよい。
【実施例1】
【0024】
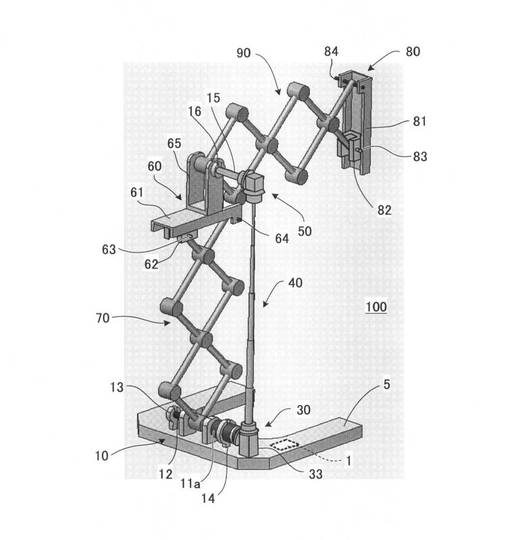
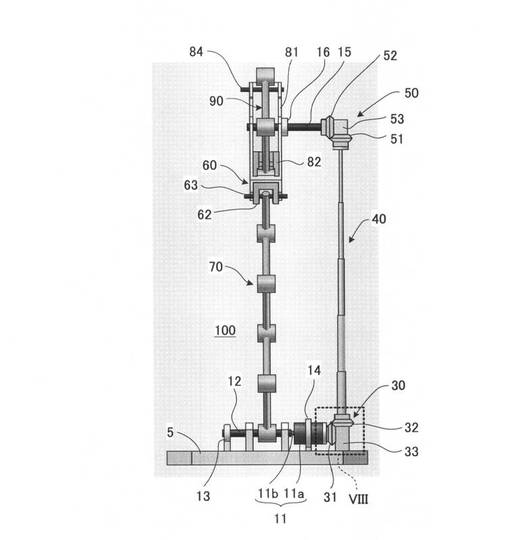
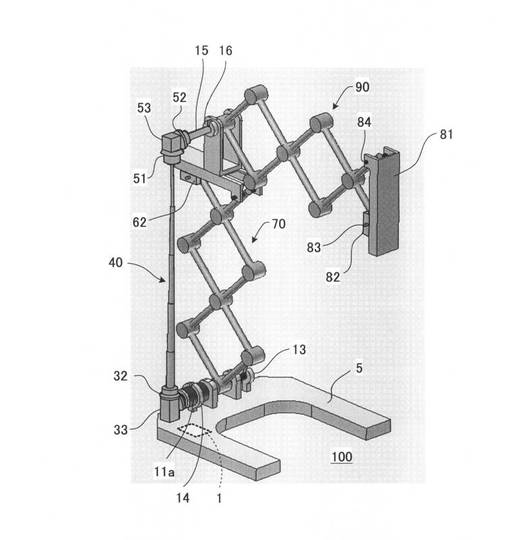
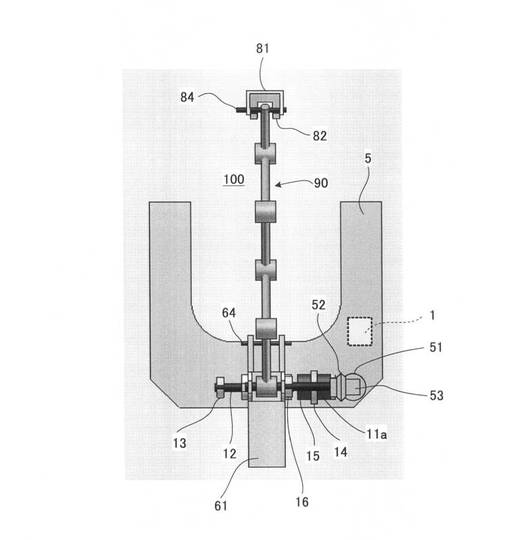
図2〜図6は、本発明の第一実施例に係る階段昇降装置100の概略図であり、図2が背面斜視図を示し、図3が背面図を示し、図4が前面斜視図を示す。また、図5が上面図を示し、図6が左側面図を示す。
【0025】
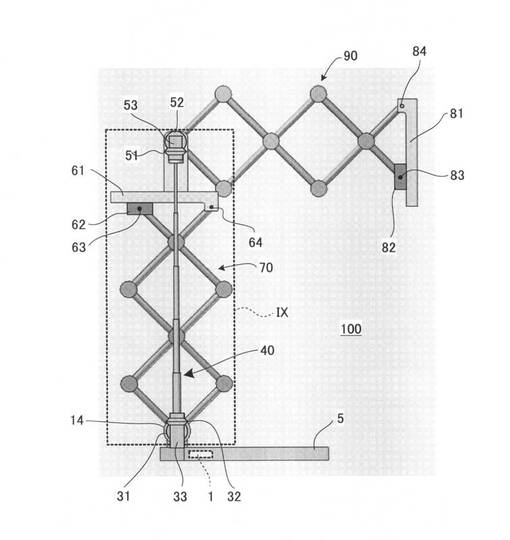
階段昇降装置100は、主に、制御部1、第一支持部5、駆動部10、第一回転方向変換機構30、回転伝達機構40、第二回転方向変換機構50、第二支持部60、第一リンク機構70、第三支持部80、及び第二リンク機構90で構成される。
【0026】
制御部1は、階段昇降装置100の動きを制御する機能要素であり、例えば、CPU(Central Processing Unit)、RAM(Random Access Memory)、ROM(Read Only Memory)等を備えたコンピュータである。制御部1は、操作者の指示に応じて階段昇降装置100を動作させるために、或いは、各種情報に基づいて自動的に階段昇降装置100を動作させるために、駆動部10を制御する。
【0027】
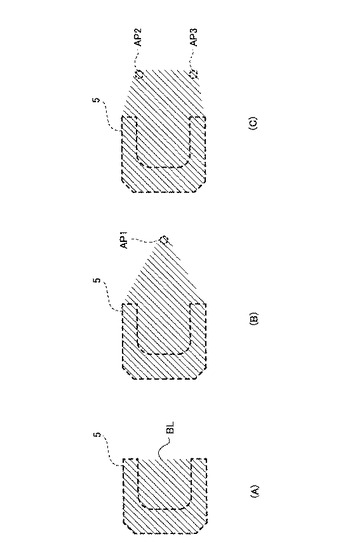
第一支持部5は、第一リンク機構70を支持するための機能要素であり、例えば、床面と接触しながら支持多角形を形成する、上面視で馬蹄形の補助足である。
【0028】
なお、「支持多角形」は、階段昇降装置100と床面と間の接地点群を凸状に張った辺で構成される凸多角形であり、曲線を含む概念である。
【0029】
図7は、支持多角形の説明図であり、図7(A)は、第一支持部5(破線領域)によって形成される支持多角形(斜線ハッチング領域)を示し、図7(B)は、第一支持部5と一つの付加的な接地点AP1とによって形成される支持多角形を示し、図7(C)は、第一支持部5と二つの付加的な接地点AP2、AP3とによって形成される支持多角形を示す。
【0030】
このように、第一支持部5によって形成される支持多角形は、その支持多角形の外に付加的な接地点が追加された場合には、その付加的な接地点を含む支持多角形にまでその領域が拡大される。
【0031】
また、第一支持部5は、上面視でU字型、C字型、H字型、E字型等の他の形状を有するものであってもよい。
【0032】
駆動部10は、第一リンク機構70及び第二リンク機構90を伸縮させる機能要素であり、例えば、電動モータ11、第一回転軸12、第一電磁ブレーキ13、第二電磁ブレーキ14、第二回転軸15、及び第三電磁ブレーキ16で構成される。
【0033】
電動モータ11は、バッテリ等の電源から供給される電力により回転駆動される機能要素であり、例えば、図3で示すように、制御部1からの制御信号に応じ、本体部(ステータ)11aに対して駆動軸11bを相対回転させ、或いは、駆動軸11bに対して本体部11aを相対回転させる。
【0034】
また、電動モータ11は、回転状態(回転方向、回転角度、回転速度等である。)を検出するための回転検出器11c(図示せず。)を備える。回転検出器11cは、例えば、レゾルバ、エンコーダ等であって、その検出値を回転状態情報として所定のサンプリング周期で繰り返し制御部1に対して出力する。
【0035】
第一回転軸12は、電動モータ11の駆動軸11bに連結される機能要素であり、第一支持部5によって軸支されて駆動軸11bと共に回転し、第一リンク機構70を伸縮できるように第一リンク機構70に係合される。
【0036】
第一電磁ブレーキ13は、バッテリ等の電源から供給される電力により第一回転軸12の回転を制動するための制動力を制御する機能要素であり、例えば、制御部1からの制御信号に応じて、第一回転軸12の回転を制動するための制動力を発生させ、或いはその制動力を解除する。
【0037】
また、第一電磁ブレーキ13は、制動力を発生させているか否か、すなわち動作状態か非動作状態かを動作状態情報として所定のサンプリング周期で繰り返し制御部1に対して出力する。
【0038】
第二電磁ブレーキ14は、バッテリ等の電源から供給される電力により電動モータ11の本体部11aの回転を制動するための制動力を制御する機能要素であり、例えば、制御部1からの制御信号に応じて、電動モータ11の本体部11aの回転を制動するための制動力を発生させ、或いはその制動力を解除する。
【0039】
また、第二電磁ブレーキ14は、第一電磁ブレーキ13と同様、制動力を発生させているか否か、すなわち動作状態か非動作状態かを動作状態情報として所定のサンプリング周期で繰り返し制御部1に対して出力する。
【0040】
第二回転軸15は、電動モータ11の本体部11aに間接的に連結される機能要素であり、第二支持部60によって軸支されて本体部11aと共に回転し、第二リンク機構90を伸縮できるように第二リンク機構90に係合される。
【0041】
第三電磁ブレーキ16は、バッテリ等の電源から供給される電力により第二回転軸15の回転を制動するための制動力を制御する機能要素であり、例えば、制御部1からの制御信号に応じて、第二回転軸15の回転を制動するための制動力を発生させ、或いはその制動力を解除する。
【0042】
また、第三電磁ブレーキ16は、第一電磁ブレーキ13及び第二電磁ブレーキ14と同様、制動力を発生させているか否か、すなわち動作状態か非動作状態かを動作状態情報として所定のサンプリング周期で繰り返し制御部1に対して出力する。
【0043】
第一回転方向変換機構30は、駆動部10の回転駆動力を、駆動部10の回転軸とは異なる回転軸周りの回転駆動力に変換するための機構であり、例えば、駆動部10の回転駆動力を、駆動部10の回転軸と直交する回転軸の周りの回転駆動力に変換する。
【0044】
具体的には、第一回転方向変換機構30は、例えば、傘歯車31、32、支持ボックス33で構成される。
【0045】
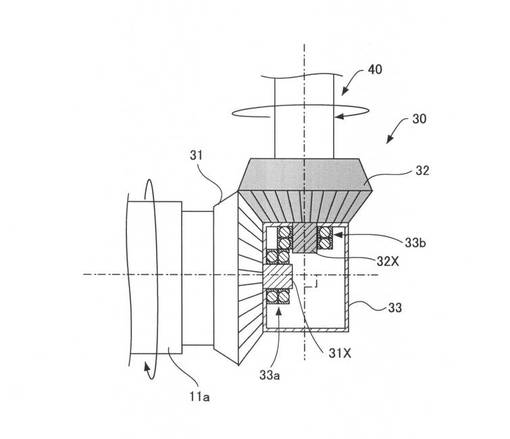
ここで、図8を参照しながら、第一回転方向変換機構30の詳細について説明する。なお、図8は、図3の破線領域VIIIに対応する図であり、支持ボックス33の内部を断面図で示す。
【0046】
傘歯車31は、電動モータ11の本体部11aと共に回転するよう本体部11aに結合される。傘歯車32は、回転伝達機構40と共に回転するよう回転伝達機構40に結合される。支持ボックス33は、傘歯車31の回転軸31Xを回転可能に支持する軸受33a、及び、傘歯車32の回転軸32Xを回転可能に支持する軸受33bを備える。また、支持ボックス33は、傘歯車31の回転軸31Xと傘歯車32の回転軸32Xとが直交するように、傘歯車31、32を支持する。この構成により、第一回転方向変換機構30は、駆動部10の回転駆動力を、駆動部10の回転軸と直交する回転軸の周りの回転駆動力に変換する。
【0047】
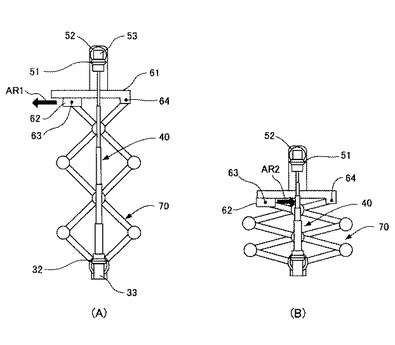
回転伝達機構40は、回転駆動力を伝達する伸縮可能な機構であり、例えば、テレスコープ式のリンク機構を備え、その伸縮方向に伸びる回転軸の周りを回転する。
【0048】
第二回転方向変換機構50は、回転伝達機構40の回転駆動力を、回転伝達機構40の回転軸とは異なる回転軸周りの回転駆動力に変換するための機構であり、例えば、回転伝達機構40の回転駆動力を、回転伝達機構40の回転軸と直交する回転軸の周りの回転駆動力に変換する。第二回転方向変換機構50は、例えば、第一回転方向変換機構30と同様、傘歯車51、52、支持ボックス53で構成される。
【0049】
傘歯車51は、回転伝達機構40と共に回転するよう回転伝達機構40に結合される。傘歯車52は、第二回転軸15と共に回転するよう第二回転軸15に結合される。支持ボックス53は、傘歯車51の回転軸を回転可能に支持する軸受、及び、傘歯車52の回転軸を回転可能に支持する軸受を備える。また、支持ボックス53は、傘歯車51の回転軸と傘歯車52の回転軸とが直交するように、傘歯車51、52を支持する。この構成により、第二回転方向変換機構50は、回転伝達機構40の回転駆動力を、回転伝達機構40の回転軸と直交する回転軸の周りの回転駆動力に変換する。
【0050】
第二支持部60は、第二リンク機構90を支持する機能要素であり、例えば、ガイド部61、スライダ62、連結ピン63、64、軸支部65で構成される。
【0051】
ガイド部61は、第一リンク機構70の二つの上端のうちの一方が枢動可能に連結されたスライダ62を水平方向にスライド可能に支持し、且つ、第一リンク機構70の二つの上端のうちの他方が枢動可能に連結される部材である。
【0052】
スライダ62は、第一リンク機構70の二つの上端のうちの一方が枢動可能に連結される部材であり、第一リンク機構70の伸縮に応じ、ガイド部61に沿ってスライドする。
【0053】
連結ピン63は、第一リンク機構70の二つの上端のうちの一方を枢動可能にスライダ62に連結する部材である。
【0054】
連結ピン64は、第一リンク機構70の二つの上端のうちの他方を枢動可能にガイド部61に連結する部材である。
【0055】
軸支部65は、ガイド部61に固定的に取り付けられる部材であり、駆動部10の第二回転軸15を軸支する。
【0056】
第一リンク機構70は、回転関節を利用した直動機構であり、例えば、ラチス構造を用いて鉛直方向に伸縮可能な直動機構である。
【0057】
具体的には、第一リンク機構70は、一方の側が第一回転軸12を介して第一支持部5に接続され、他方の側が第二支持部60の連結ピン63、64を介して第二支持部60のガイド部61及びスライダ62に接続される。
【0058】
ここで、図9を参照して、第一リンク機構70の動きについて説明する。なお、図9は、図6の破線領域IXに対応する図であり、図9(A)は、第一リンク機構70が展開された(伸長された)状態を示し、図9(B)は、第一リンク機構70が折り畳まれた(短縮された)状態を示す。
【0059】
具体的には、図9(A)に示す状態において駆動部10の電動モータ11が第一回転軸12を第一方向に回転させると、第一リンク機構70が図9(B)で示すように折り畳まれ、テレスコープ式の回転伝達機構40の長さも縮む。より具体的には、第一電磁ブレーキ13の制動力を解除し、且つ、第二電磁ブレーキ14の制動力を発生させた状態で、駆動部10の電動モータ11を第一方向に回転させると、静止した本体部11aに対して駆動軸11bが第一方向に回転する。第一電磁ブレーキ13によって駆動軸11bの回転が制動されることはないが、第二電磁ブレーキ14によって本体部11aの回転が制動されるためである。その結果、駆動部10は、第一回転軸12を第一方向に回転させることができ、第一リンク機構70を折り畳み、且つ、テレスコープ式の回転伝達機構40の長さを短縮できる。なお、電動モータ11の本体部11aが回転しないため、第二回転軸15が回転することはないが、第三電磁ブレーキ16は、第二回転軸15の回転を確実に制動するための制動力を発生させてもよい。また、スライダ62は、図9(A)の矢印AR1で示すように、ガイド部61に沿って図の左方向にスライドし、連結ピン63と連結ピン64との間の距離を大きくして、第一リンク機構70が折り畳まれるようにする。
【0060】
また、図9(B)に示す状態において駆動部10の電動モータ11が第一回転軸12を、第一方向とは反対の第二方向に回転させると、第一リンク機構70が図9(A)で示すように展開され、テレスコープ式の回転伝達機構40の長さも伸びる。より具体的には、第一電磁ブレーキ13の制動力を解除し、且つ、第二電磁ブレーキ14の制動力を発生させた状態で、駆動部10の電動モータ11を第二方向に回転させると、静止した本体部11aに対して駆動軸11bが第二方向に回転する。第一電磁ブレーキ13によって駆動軸11bの回転が制動されることはないが、第二電磁ブレーキ14によって本体部11aの回転が制動されるためである。その結果、駆動部10は、第一回転軸12を第二方向に回転させることができ、第一リンク機構70を展開し、且つ、テレスコープ式の回転伝達機構40の長さを延長できる。この場合も、電動モータ11の本体部11aが回転しないため、第二回転軸15が回転することはないが、第三電磁ブレーキ16は、第二回転軸15の回転を確実に制動するための制動力を発生させてもよい。また、スライダ62は、図9(B)の矢印AR2で示すように、ガイド部61に沿って図の右方向にスライドし、連結ピン63と連結ピン64との間の距離を小さくして、第一リンク機構70が展開されるようにする。
【0061】
第三支持部80は、被昇降物を支持する機能要素であり、例えば、ガイド部81、スライダ82、連結ピン83、84で構成される。
【0062】
ガイド部81は、第二リンク機構90の二つの側端のうちの一方が枢動可能に連結されたスライダ82を鉛直方向にスライド可能に支持し、且つ、第二リンク機構90の二つの側端のうちの他方が枢動可能に連結される部材である。
【0063】
また、ガイド部81は、支持対象の被昇降物が取り付けられる部材であり、例えば、ボトル等の締め付け具を用いて被昇降物に締め付けられる。
【0064】
スライダ82は、第二リンク機構90の二つの側端のうちの一方が枢動可能に連結される部材であり、第二リンク機構90の伸縮に応じ、ガイド部81に沿ってスライドする。
【0065】
連結ピン83は、第二リンク機構90の二つの側端のうちの一方を枢動可能にスライダ82に連結する部材である。
【0066】
連結ピン84は、第二リンク機構90の二つの側端のうちの他方を枢動可能にガイド部81に連結する部材である。
【0067】
第二リンク機構90は、第一リンク機構70と同様に回転関節を利用した直動機構であり、例えば、ラチス構造を用いて水平方向に伸縮可能な機構である。
【0068】
具体的には、第二リンク機構90は、一方の側が第二回転軸15を介して第二支持部60に接続され、他方の側が第三支持部80の連結ピン83、84を介して第三支持部80のガイド部81及びスライダ82に接続される。
【0069】
本実施例において、第二リンク機構90の動きは、第一リンク機構70の動きと同様、駆動部10の回転駆動力によってもたらされる。具体的には、第一電磁ブレーキ13の制動力を発生させ、第二電磁ブレーキ14の制動力を解除し、且つ第三電磁ブレーキ16の制動力を解除した状態で、駆動部10の電動モータ11を第一方向に回転させると、静止した駆動軸11bに対して本体部11aが第二方向に回転する。第二電磁ブレーキ14によって本体部11aの回転が制動されることはないが、第一電磁ブレーキ13によって駆動軸11bの回転が制動されるためである。その結果、駆動部10は、本体部11a、傘歯車31、傘歯車32、回転伝達機構40、傘歯車51、及び傘歯車52を順番に回転させ、第二回転軸15を第一方向に回転させることができ、第二リンク機構90を折り畳むことができる。また、スライダ82は、ガイド部81に沿って鉛直下方向にスライドし、連結ピン83と連結ピン84との間の距離を大きくして、第二リンク機構90が折り畳まれるようにする。
【0070】
また、駆動部10の電動モータ11が第二回転軸15を、第一方向とは反対の第二方向に回転させると、第二リンク機構90が展開される。具体的には、第一電磁ブレーキ13の制動力を発生させ、第二電磁ブレーキ14の制動力を解除し、且つ第三電磁ブレーキ16の制動力を解除した状態で、駆動部10の電動モータ11を第二方向に回転させると、静止した駆動軸11bに対して本体部11aが第一方向に回転する。第二電磁ブレーキ14によって本体部11aの回転が制動されることはないが、第一電磁ブレーキ13によって駆動軸11bの回転が制動されるためである。その結果、駆動部10は、本体部11a、傘歯車31、傘歯車32、回転伝達機構40、傘歯車51、及び傘歯車52を順番に回転させ、第二回転軸15を第二方向に回転させることができ、第二リンク機構90を展開することができる。また、スライダ82は、ガイド部81に沿って鉛直上方向にスライドし、連結ピン83と連結ピン84との間の距離を小さくして、第二リンク機構90が展開されるようにする。
【0071】
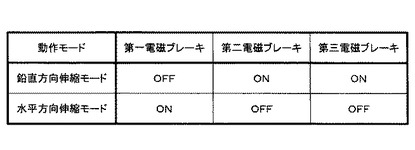
図10は、第一リンク機構70又は第二リンク機構90を伸縮させるときの第一電磁ブレーキ13、第二電磁ブレーキ14、及び第三電磁ブレーキ16の目標動作状態を示す。
【0072】
図10の「動作モード」における「鉛直方向伸縮モード」は、第一リンク機構70を展開し或いは折り畳むときの動作に対応し、「動作モード」における「水平方向伸縮モード」は、第二リンク機構90を展開し或いは折り畳むときの動作に対応する。また、図10の「ON」は、電磁ブレーキが動作状態であることを表し、「OFF」は、電磁ブレーキが非動作状態であることを表す。
【0073】
このように、駆動部10の第一電磁ブレーキ13、第二電磁ブレーキ14、及び第三電磁ブレーキ16、並びに、第一回転方向変換機構30、回転伝達機構40、及び第二回転方向変換機構50は、電動モータ11の回転駆動力の伝達先を第一リンク機構70と第二リンク機構90とで切り替える切り替え機構を構成する。具体的には、切り替え機構は、第一リンク機構70を伸縮させるための第一回転軸12の回転と、第二リンク機構90を伸縮させるための第二回転軸15の回転とを切り替える。
【0074】
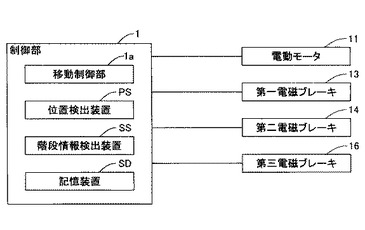
次に、図11を参照しながら、制御部1の詳細について説明する。なお、図11は、階段昇降装置100の機能ブロック図であり、制御部1は、電動モータ11、第一電磁ブレーキ13、第二電磁ブレーキ14、及び第三電磁ブレーキ16のそれぞれ(以下、「制御対象」とする。)に有線又は無線で接続されるものとする。
【0075】
制御部1は、移動制御部1a、位置検出装置PS、階段情報検出装置SS、及び記憶装置SDを備え、移動制御部1aに対応するプログラムをROMから読み出してRAM上に展開し、位置検出装置PSが出力する検出値と、階段情報検出装置SSが出力する検出値又は記憶装置SDに記憶された情報とに基づいて、移動制御部1aに対応する処理をCPUに実行させる。
【0076】
位置検出装置PSは、階段昇降装置100の位置を検出するための装置であり、例えば、GPS(Global Positioning System)受信機が受信したGPS信号に基づいて階段昇降装置100の位置(緯度、経度、高度)を検出する。
【0077】
また、位置検出装置PSは、昇降対象となる階段までの距離を検出するレーザセンサであってもよい。
【0078】
階段情報検出装置SSは、昇降対象の階段に関する情報を検出するための装置であり、例えば、レーザセンサや超音波センサ等の検出値に基づいて昇降対象の階段の踏み面、蹴上げ等の階段情報を検出する。
【0079】
記憶装置SDは、各種情報を記憶するための装置であり、例えば、ハードディスクやフラッシュメモリ等の不揮発性記憶媒体であって、昇降対象となる階段の階段情報を記憶する。この場合、階段昇降装置100の操作者は、階段昇降装置100に付属の無線操作端末等の操作部(図示せず。)を介して、昇降対象の階段の踏み面、蹴上げ等の階段情報を予め入力する。
【0080】
制御部1の移動制御部1aは、階段昇降装置100を自律的に動作させるための機能要素であり、位置検出装置PSの検出値と、階段情報検出装置SSが検出する階段情報又は記憶装置SDから読み出した階段情報とに基づいて、電動モータ11の目標回転状態、並びに、第一電磁ブレーキ13、第二電磁ブレーキ14、及び第三電磁ブレーキ16のそれぞれの目標動作状態を決定し、決定した目標回転状態及び目標動作状態に関する情報を含む制御信号を制御対象のそれぞれに対して出力する。
【0081】
また、移動制御部1aは、制御対象のそれぞれが出力する回転状態情報及び動作状態情報を所定のサンプリング周期で受信し、制御対象のそれぞれが目標回転状態及び目標動作状態となるよう、制御対象のそれぞれを独立に制御する。
【0082】
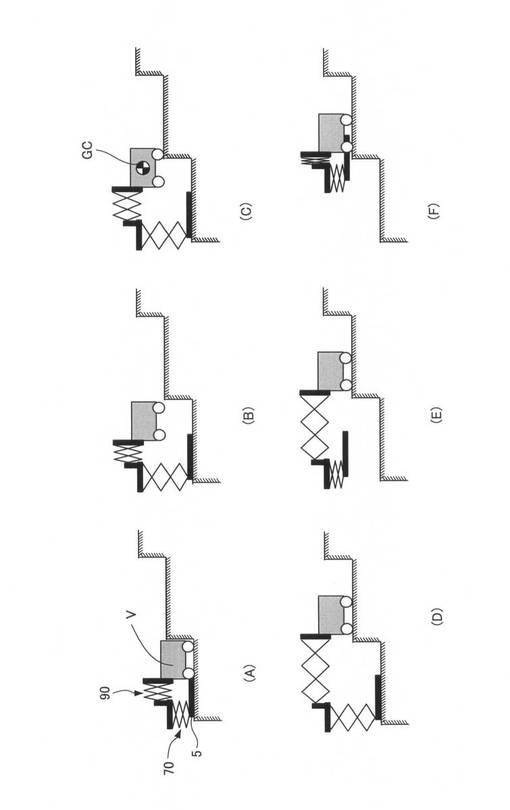
次に、図12を参照しながら、階段昇降装置100が階段で被昇降物Vを昇降させる動作について説明する。
【0083】
階段昇降装置100が階段で被昇降物Vを昇降させる際の動きは、図12(A)〜図12(F)の六つの状態で表され、階段を昇る場合、図12(A)〜図12(F)の順で時系列に進行するものとする。なお、階段昇降装置100の動きは、階段を降りる場合には、階段を昇る場合とは逆の順番で時系列に進行する。
【0084】
また、図12(A)〜図12(F)のそれぞれは、階段で被昇降物Vを昇降させる階段昇降装置100の側面図であり、被昇降物Vは、四つの車輪を備えた移動体である。したがって、被昇降物Vは、第一リンク機構70を折り畳んで階段昇降装置100の第一支持部5を床面から浮かせた状態で、階段昇降装置100と共に移動することができる。なお、被昇降物Vは、オムニホイール等の全方向移動機構を備えた移動体であってもよい。
【0085】
図12(A)において、階段昇降装置100は、階段の一段目に被昇降物Vと第一支持部5とを接地させた状態となっている。また、駆動部10の第一電磁ブレーキ13、第二電磁ブレーキ14、及び第三電磁ブレーキ16、並びに、第一回転方向変換機構30、回転伝達機構40、及び第二回転方向変換機構50で構成される切り替え機構の動作モードは、電動モータ11の回転駆動力を第一リンク機構70に伝達する鉛直方向伸縮モード(図10参照。)となっている。
【0086】
図12(B)において、階段昇降装置100は、階段の一段目に第一支持部5を接地させたままの状態で、第一リンク機構70を展開させて被昇降物Vを上方に鉛直移動させる。階段情報検出装置SSが検出した階段情報又は記憶装置SDに記憶された階段情報における階段の蹴上げ分だけ被昇降物Vを上昇させるためである。
【0087】
その後、切り替え機構の動作モードは、鉛直方向伸縮モードから水平方向伸縮モードに切り替えられ、電動モータ11の回転駆動力が第二リンク機構90に伝達されるようにする。
【0088】
図12(C)において、階段昇降装置100は、階段の一段目に第一支持部5を接地させたままの状態で、第二リンク機構90を展開させて被昇降物Vを進行方向(図中右方向)に水平移動させる。
【0089】
このとき、階段昇降装置100は、そのZMP(Zero Moment Point)が、第一支持部5によって形成される支持多角形(図7(A)参照。)内に維持されるよう、所定範囲内の値の加速度で被昇降物Vを進行方向に水平移動させる。
【0090】
「ZMP」とは、重力と慣性力との合力が床面と交差する点であり、加速度が大きい程、進行方向に対する逆方向(以下、「進行逆方向」とする。)に移動する。進行方向における加速度が大きい程、進行逆方向の慣性力が大きくなるためである。そのため、加速度が小さい程、階段昇降装置100のZMPは、被昇降物Vの水平移動距離がより小さい段階で、その支持多角形の進行方向側の境界(図7(A)の境界線BL参照。)から逸脱しやすくなる。仮に、ZMPが支持多角形から逸脱すると、階段昇降装置100は転倒を開始する。これに対し、階段昇降装置100は、被昇降物Vの加速度を所定範囲内の値の加速度とすることで、そのZMPが第一支持部5による支持多角形から逸脱するのを遅らせるようにする(被昇降物Vの加速度がより小さい場合に比べ、被昇降物Vの水平移動距離がより大きくなるまでZMPを支持多角形内に留まらせるようにする。)。
【0091】
その後、階段昇降装置100は、被昇降物Vを階段の二段目に接地させるために、進行方向に水平移動する被昇降物Vを所定の割合で減速させるようにする。仮に、被昇降物Vを減速させると、進行方向を向く慣性力が発生し、ZMPは第一支持部5による支持多角形を進行方向側に大きく逸脱し、階段昇降装置100は転倒を開始する。これに対し、階段昇降装置100は、第一支持部5による支持多角形を拡大し、階段昇降装置100のZMPをその拡大後の支持多角形内に留めるようにする。具体的には、階段昇降装置100は、所定範囲内の値の加速度で被昇降物Vを進行方向に水平移動させている間に、被昇降物Vの車輪を階段の二段目に接地させる。これにより、階段昇降装置100は、第一支持部5による支持多角形(図7(A)参照。)を、その車輪の接地点を含む支持多角形(図7(C)参照。)にまで拡大する。そして、階段昇降装置100は、所定の割合で減速する階段昇降装置100のZMPがその拡大後の支持多角形内に留まるようにして階段昇降装置100の転倒を抑えるようにする。
【0092】
図12(D)において、階段昇降装置100は、被昇降物Vの全ての車輪を階段の二段目に接地させる。その後、切り替え機構の動作モードは、水平方向伸縮モードから鉛直方向伸縮モードに切り替えられ、電動モータ11の回転駆動力が再び第一リンク機構70に伝達されるようにする。
【0093】
図12(E)において、階段昇降装置100は、被昇降物Vの全ての車輪を階段の二段目に接地させたままの状態で、第一リンク機構70を折り畳んで第一支持体5を階段の蹴上げ分だけ上昇させるようにする。その後、切り替え機構の動作モードは、鉛直方向伸縮モードから水平方向伸縮モードに再び切り替えられ、電動モータ11の回転駆動力が再び第二リンク機構90に伝達されるようにする。
【0094】
図12(F)において、階段昇降装置100は、被昇降物Vの全ての車輪を階段の二段目に接地させたままの状態で、第二リンク機構90を折り畳んで第一支持体5を図の右方向に移動させる。このとき、階段昇降装置100は、第一支持体5を階段の二段目に接地させた場合には、接地位置が一段高いのを除き、図12(A)の状態とほぼ同じ状態となる。
【0095】
このようにして、階段昇降装置100は、図12(A)〜図12(F)の六つの状態を繰り返すようにして、被昇降物Vを一段ずつ昇らせることができる。被昇降物Vを一段ずつ降ろす場合も同様である。
【0096】
なお、上述の階段昇降装置100は、所定範囲内の値の加速度で被昇降物Vを進行方向に水平移動させることによって、第一支持部5によって形成される支持多角形内からそのZMPが逸脱するのを遅らせるようにして転倒を防止する。しかしながら、階段昇降装置100は、階段昇降装置100の重心GCの位置を動的に変化させるアクティブバランサ機構を用いることによって、進行方向における被昇降物Vの水平移動速度にかかわらず、第一支持部5によって形成される支持多角形内にその重心GCの床面投影点を留まらせて転倒を防止するようにしてもよい。
【0097】
以上の構成により、階段昇降装置100は、一つの電動モータ11と切り替え機構とを用いて第一リンク機構70及び第二リンク機構90のそれぞれを独立して動作させ、被昇降物Vの位置を上下及び前後に移動させながら、階段で被昇降物Vを昇降させることができる。その結果、階段昇降装置100は、二つの電動モータを利用する構成に比べ、さらにコンパクトで低コストとなる構造を採用しながらも、階段で被昇降物Vを昇降させることができる。なお、階段昇降装置100は、切り替え機構を採用することなく、電動モータ11とは別の電動モータで第二回転軸15を回転させて第二リンク機構90を動作させるようにしてもよい。
【0098】
また、階段昇降装置100は、複数の電磁ブレーキを利用した切り替え機構を採用するため、切り替えタイミングが固定される機械式の切り替え機構を採用した場合に比べ、切り替えタイミングをより柔軟に設定することができる。その結果、階段昇降装置100は、蹴上げ(高さ)や踏み面(奥行き)の異なる複数の階段のそれぞれに対応することができる。
【実施例2】
【0099】
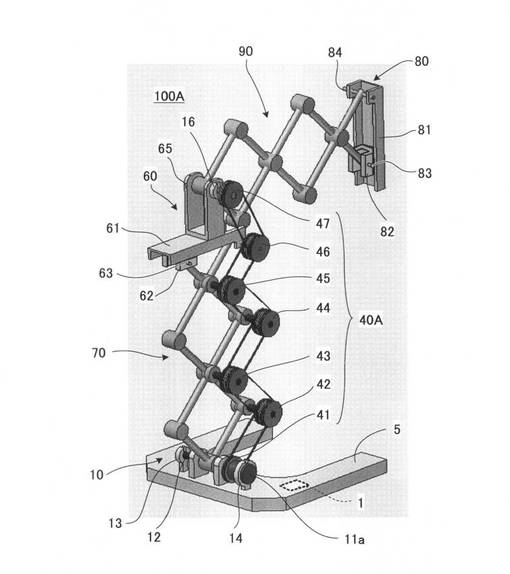
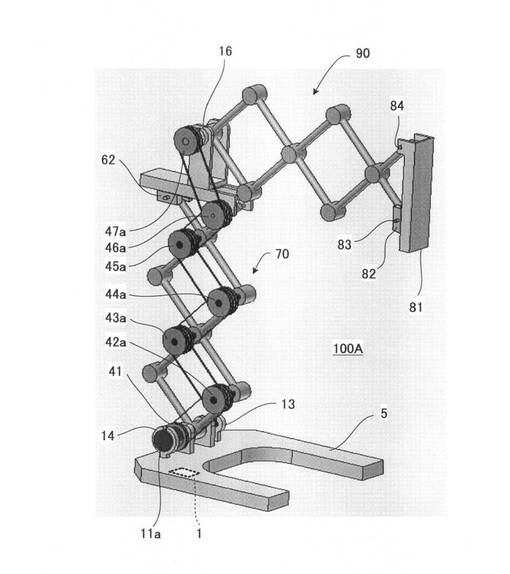
次に、図13〜19を参照しながら、本発明の第二実施例に係る階段昇降装置100Aについて説明する。
【0100】
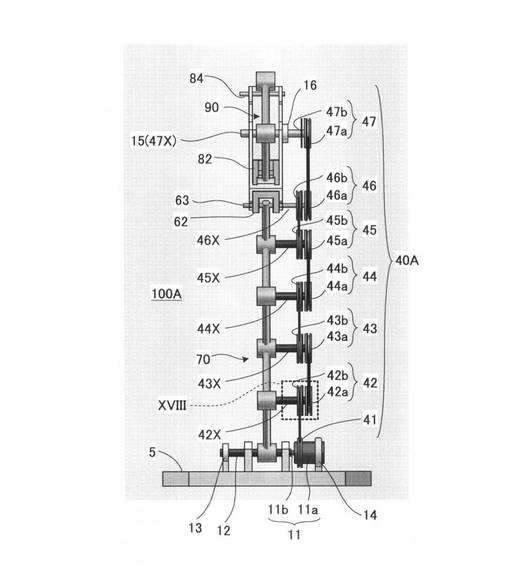
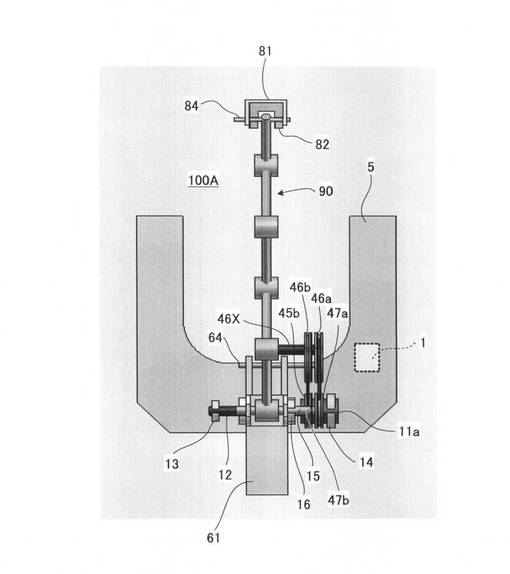
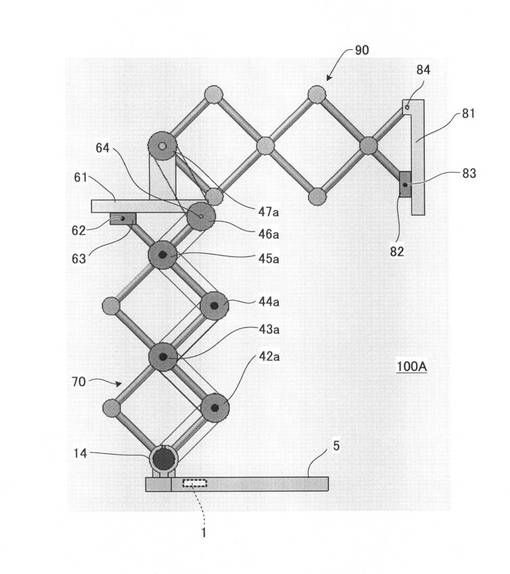
図13〜図17は、本発明の第二実施例に係る階段昇降装置100Aの概略図であり、図13が背面斜視図を示し、図14が背面図を示し、図15が前面斜視図を示す。また、図16が上面図を示し、図17が左側面図を示す。
【0101】
階段昇降装置100Aは、主に、制御部1、第一支持部5、駆動部10、回転伝達機構40A、第二支持部60、第一リンク機構70、第三支持部80、及び第二リンク機構90で構成される。
【0102】
また、階段昇降装置100Aは、第一回転方向変換機構30、回転伝達機構40、第二回転方向変換機構50の代わりに、回転伝達機構40Aを備える点で、第一実施例に係る階段昇降装置100と相違するが、その他の点で階段昇降装置100と共通する。そのため、以下では、共通点の説明を省略し、また、共通の構成要素を同じ参照符号で参照しながら、相違点を詳細に説明する。
【0103】
回転伝達機構40Aは、回転駆動力を伝達する伸縮可能な機構であり、主に、プーリ41、第一電磁石プーリ42、第二電磁石プーリ43、第三電磁石プーリ44、第四電磁石プーリ45、第五電磁石プーリ46、及び第六電磁石プーリ47で構成される。
【0104】
また、本実施例において、回転伝達機構40Aは、電動モータ11の回転駆動力の伝達先を第一リンク機構70と第二リンク機構90とで切り替える切り替え機構を構成する。具体的には、切り替え機構は、第一リンク機構70を伸縮させるための第一回転軸12の回転と、第二リンク機構90を伸縮させるための第二回転軸15の回転とを切り替える。
【0105】
プーリ41は、電動モータ11の本体部11aに固定され、本体部11aと共に回転するプーリである。
【0106】
第一電磁石プーリ42は、回転軸42Xに対して回転可能に且つ軸方向に移動可能に取り付けられる可動部42aと、回転軸42Xに対して回転可能に且つ軸方向に移動不能に取り付けられる固定部42bとで構成される。
【0107】
また、第一電磁石プーリ42は、制御部1からの制御信号に応じてその動作状態と非動作状態とを切り替える。そして、第一電磁石プーリ42は、動作状態であるか否かを動作状態情報として所定のサンプリング周期で繰り返し制御部1に対して出力する。第二電磁石プーリ43〜第六電磁石プーリ47についても同様である。
【0108】
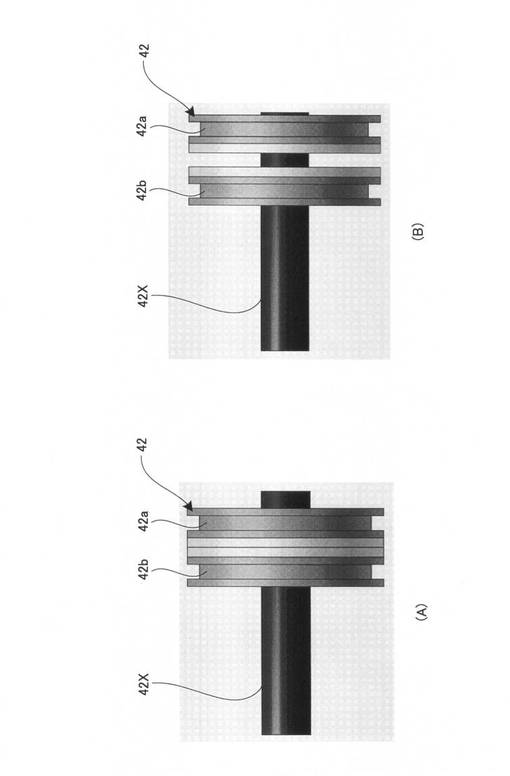
ここで、図18を参照しながら、第一電磁石プーリ42の動きを説明する。なお、図18は、図14の破線領域XVIIIに対応する図であり、図18(A)が第一電磁石プーリ42の動作状態を示し、図18(B)が第一電磁石プーリ42の非動作状態を示す。
【0109】
また、図18は、代表として第一電磁石プーリ42を参照しながらその動きを説明するが、第二電磁石プーリ43〜第六電磁石プーリ47のそれぞれの動きは、第一電磁石プーリ42の動きと同様である。
【0110】
第一電磁石プーリ42は、バッテリ等の電源から電力の供給を受け、可動部42a及び固定部42bのそれぞれに配置された電磁石で電磁力(引力)を発生させ、可動部42aを固定部42bの方へ引き付ける。その結果、第一電磁石プーリ42は、図18(A)で示すような動作状態となり、可動部42aと固定部42bとを一体回転可能にする。
【0111】
一方、第一電磁石プーリ42は、バッテリ等の電源から電力の供給を受け、可動部42a及び固定部42bのそれぞれに配置された電磁石で電磁力(斥力)を発生させ、可動部42aを固定部42bから遠ざける。その結果、第一電磁石プーリ42は、図18(B)で示すような非動作状態となり、可動部42aと固定部42bとを一体回転不能にする。なお、第一電磁石プーリ42は、斥力を発生させることなく、単に電磁力を消失させるだけで非動作状態をもたらすようにしてもよい。
【0112】
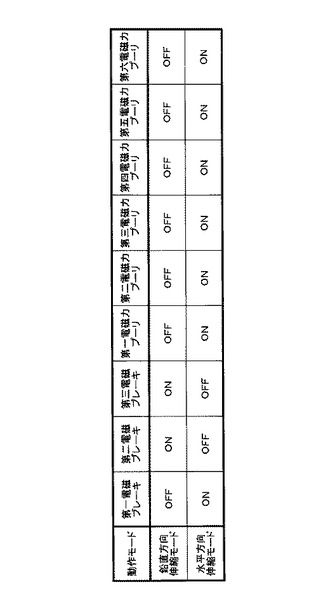
次に、図19を参照しながら、第一リンク機構70又は第二リンク機構90を伸縮させるときの第一電磁ブレーキ13、第二電磁ブレーキ14、及び第三電磁ブレーキ16、並びに、第一電磁石プーリ42〜第六電磁力プーリ47の目標動作状態について説明する。なお、図19の「動作モード」における「鉛直方向伸縮モード」は、第一リンク機構70を展開し或いは折り畳むときの動作に対応し、「動作モード」における「水平方向伸縮モード」は、第二リンク機構90を展開し或いは折り畳むときの動作に対応する。また、図19の「ON」は、電磁ブレーキ、電磁力プーリが動作状態であることを表し、「OFF」は、電磁ブレーキ、電磁力プーリが非動作状態であることを表す。
【0113】
図19の「鉛直方向伸縮モード」で示す設定において駆動部10の電動モータ11が第一回転軸12を第一方向に回転させると、第一リンク機構70が折り畳まれる。より具体的には、第一電磁ブレーキ13の制動力を解除し、且つ、第二電磁ブレーキ14の制動力を発生させた状態で、駆動部10の電動モータ11を第一方向に回転させると、静止した本体部11aに対して駆動軸11bが第一方向に回転する。第一電磁ブレーキ13によって駆動軸11bの回転が制動されることはないが、第二電磁ブレーキ14によって本体部11aの回転が制動されるためである。その結果、駆動部10は、第一回転軸12を第一方向に回転させることができ、第一リンク機構70を折り畳むことができる。なお、電動モータ11の本体部11aが回転しないため、プーリ41が回転することはなく、第一電磁石プーリ42〜第六電磁石プーリ47、及び第二回転軸15が回転することもない。しかしながら、第一電磁石プーリ42〜第六電磁石プーリ47は、非動作状態となるように制御されてもよい。電動モータ11の回転駆動力が第二回転軸15に伝達されるのをより確実に防止するためである。また、第三電磁ブレーキ16は、第二回転軸15の回転を確実に制動するための制動力を発生させてもよい。また、スライダ62は、連結ピン63と連結ピン64との間の距離が大きくなるようにガイド部61に沿ってスライドし、第一リンク機構70が折り畳まれるようにする。
【0114】
また、図19の「鉛直方向伸縮モード」で示す設定において、駆動部10の電動モータ11が第一回転軸12を、第一方向とは反対の第二方向に回転させると、第一リンク機構70が展開される。より具体的には、第一電磁ブレーキ13の制動力を解除し、且つ、第二電磁ブレーキ14の制動力を発生させた状態で、駆動部10の電動モータ11を第二方向に回転させると、静止した本体部11aに対して駆動軸11bが第二方向に回転する。第一電磁ブレーキ13によって駆動軸11bの回転が制動されることはないが、第二電磁ブレーキ14によって本体部11aの回転が制動されるためである。その結果、駆動部10は、第一回転軸12を第二方向に回転させることができ、第一リンク機構70を展開できる。この場合も、電動モータ11の本体部11aが回転しないため、プーリ41が回転することはなく、第一電磁石プーリ42〜第六電磁石プーリ47、及び第二回転軸15が回転することもない。しかしながら、第一電磁石プーリ42〜第六電磁石プーリ47は、非動作状態となるように制御されてもよい。電動モータ11の回転駆動力が第二回転軸15に伝達されるのをより確実に防止するためである。また、第三電磁ブレーキ16は、第二回転軸15の回転を確実に制動するための制動力を発生させてもよい。また、スライダ62は、連結ピン63と連結ピン64との間の距離が小さくなるようにガイド部61に沿ってスライドし、第一リンク機構70が展開されるようにする。
【0115】
また、図19の「水平方向伸縮モード」で示すように、第一電磁ブレーキ13の制動力を発生させ、第二電磁ブレーキ14の制動力を解除し、且つ第三電磁ブレーキ16の制動力を解除した状態で、駆動部10の電動モータ11を第二方向に回転させると、静止した駆動軸11bに対して本体部11aが第一方向に回転する。第二電磁ブレーキ14によって本体部11aの回転が制動されることはないが、第一電磁ブレーキ13によって駆動軸11bの回転が制動されるためである。その結果、駆動部10は、本体部11a、プーリ41、第一電磁石プーリ42(動作状態)、第二電磁石プーリ43(動作状態)、第三電磁石プーリ44(動作状態)、第四電磁石プーリ45(動作状態)、第五電磁石プーリ46(動作状態)、及び第六電磁石プーリ47(動作状態)を順番に回転させ、第二回転軸15を第一方向に回転させることができ、第二リンク機構90を折り畳むことができる。また、スライダ82は、連結ピン83と連結ピン84との間の距離が大きくなるようにガイド部81に沿って鉛直下方向にスライドし、第二リンク機構90が折り畳まれるようにする。
【0116】
また、図19の「水平方向伸縮モード」で示す設定において、駆動部10の電動モータ11が第二回転軸15を、第二方向とは反対の第一方向に回転させると、第二リンク機構90が展開される。具体的には、第一電磁ブレーキ13の制動力を発生させ、第二電磁ブレーキ14の制動力を解除し、且つ第三電磁ブレーキ16の制動力を解除した状態で、駆動部10の電動モータ11を第一方向に回転させると、静止した駆動軸11bに対して本体部11aが第二方向に回転する。第二電磁ブレーキ14によって本体部11aの回転が制動されることはないが、第一電磁ブレーキ13によって駆動軸11bの回転が制動されるためである。その結果、駆動部10は、本体部11a、プーリ41、第一電磁石プーリ42(動作状態)、第二電磁石プーリ43(動作状態)、第三電磁石プーリ44(動作状態)、第四電磁石プーリ45(動作状態)、第五電磁石プーリ46(動作状態)、及び第六電磁石プーリ47(動作状態)を順番に回転させ、第二回転軸15を第二方向に回転させることができ、第二リンク機構90を展開することができる。また、スライダ82は、連結ピン83と連結ピン84との間の距離が小さくなるようガイド部81に沿って鉛直上方向にスライドし、第二リンク機構90が展開されるようにする。
【0117】
以上の構成により、階段昇降装置100Aは、一つの電動モータ11と切り替え機構としての回転伝達機構40Aとを用いて第一リンク機構70及び第二リンク機構90のそれぞれを独立して動作させ、被昇降物Vの位置を上下及び前後に移動させながら、階段で被昇降物Vを昇降させることができる。その結果、階段昇降装置100Aは、二つの電動モータを利用する構成に比べ、さらにコンパクトで低コストとなる構造を採用しながらも、階段で被昇降物Vを昇降させることができる。
【0118】
また、階段昇降装置100Aは、複数の電磁ブレーキを利用した切り替え機構を採用するため、切り替えタイミングが固定される機械式の切り替え機構を採用した場合に比べ、切り替えタイミングをより柔軟に設定することができる。その結果、階段昇降装置100は、蹴上げ(高さ)や踏み面(奥行き)の異なる複数の階段のそれぞれに対応することができる。
【0119】
以上、本発明の好ましい実施例について詳説したが、本発明は、上述した実施例に制限されることはなく、本発明の範囲を逸脱することなしに上述した実施例に種々の変形及び置換を加えることができる。
【0120】
例えば、上述の実施例において、階段昇降装置100、100Aは、自律的に動作するものとして説明されているが、階段昇降装置100、100Aから延びるコード等に接続される操作部(例えば、十字カーソルを備えたコントローラである。)を通じて操作者が手動で操作するものであってもよく、無線操作端末等を介した遠隔操作によって操作者が手動で操作するものであってもよい。
【0121】
また、上述の実施例において、階段昇降装置100、100Aは、階段で被昇降物を昇降させるために用いられるが、被昇降物が溝や段差を跨ぐのを補助するために用いられてもよい。
【0122】
また、上述の実施例は、被昇降物Vが4つの車輪を備えた移動体である例について説明するが、車輪の数は適宜選択され得るものである。また、被昇降物Vは、車輪を備えていなくてもよい。
【符号の説明】
【0123】
1・・・制御部 1a・・・移動制御部 5・・・第一支持部 10・・・駆動部 11・・・電動モータ 11a・・・本体部 11b・・・駆動軸 12・・・第一回転軸 13・・・第一電磁ブレーキ 14・・・第二電磁ブレーキ 15・・・第二回転軸 16・・・第三電磁ブレーキ 30・・・第一回転方向変換機構 31、32・・・傘歯車 31X、32X・・・回転軸 33・・・支持ボックス 33a、33b・・・軸受 40・・・回転伝達機構 41・・・プーリ 42〜47・・・電磁石プーリ 42a〜47a・・・可動部 42b〜47b・・・固定部 42X〜47X・・・回転軸 50・・・第二回転方向変換機構 51、52・・・傘歯車 53・・・支持ボックス 60・・・第二支持部 61・・・ガイド部 62・・・スライダ 63、64・・・連結ピン 65・・・軸支部 70・・・第一リンク機構 80・・・第三支持部 81・・・ガイド部 82・・・スライダ 83、84・・・連結ピン 90・・・第二リンク機構 100、100A・・・階段昇降装置 AP1〜AP3・・・接地点 B1〜B4・・・ベルト BL・・・境界線 H1・・・水平軸 L1〜L4・・・リンク M1、M2・・・電動モータ PS・・・位置検出装置 S1〜S3・・・支持部 SS・・・階段情報検出装置 SD・・・記憶装置 ST1、ST2・・・リンク部 V・・・被昇降物 V1・・・鉛直軸
【技術分野】
【0001】
本発明は、階段で被昇降物を昇降させる階段昇降装置に関する。
【背景技術】
【0002】
従来、階段昇降機能を有するフォークリフトが知られている(例えば、特許文献1参照。)。
【0003】
このフォークリフトは、フレームに対してフォーク荷台を上下させる駆動部と、フレームに対して折り畳み可能に取り付けられたフレーム補助脚を伸縮させる駆動部と、フォーク荷台に対して折り畳み可能に取り付けられた前部フォーク補助脚を伸縮させる駆動部と、フレーム補助脚、前部フォーク補助脚、後部フォーク補助脚のそれぞれの先端に取り付けられた補助輪を回転させる駆動部とを用いて、階段を昇降する。
【先行技術文献】
【非特許文献】
【0004】
【特許文献1】実開平6−025294号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1のフォークリフトは、階段の昇降のための機構が複雑であるため、構造の大型化が避けられないという問題がある。
【0006】
上述の問題に鑑み、本発明は、よりコンパクトな階段昇降装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上述の目的を達成するために、本発明の実施例に係る階段昇降装置は、階段で被昇降物を昇降させる階段昇降装置であって、鉛直方向に伸縮する第一リンク機構と、水平方向に伸縮する第二リンク機構と、前記第一リンク機構の一方の側に接続される足と、を備え、前記第二リンク機構の一方の側は、前記第一リンク機構の他方の側に接続され、前記被昇降物は、前記第二リンク機構の他方の側で支持されることを特徴とする。
【発明の効果】
【0008】
上述の手段により、本発明は、よりコンパクトな階段昇降装置を提供することができる。
【図面の簡単な説明】
【0009】
【図1】本発明に係る階段昇降装置の概略側面図である。
【図2】本発明の第一実施例に係る階段昇降装置の背面斜視図である。
【図3】本発明の第一実施例に係る階段昇降装置の背面図である。
【図4】本発明の第一実施例に係る階段昇降装置の前面斜視図である。
【図5】本発明の第一実施例に係る階段昇降装置の上面図である。
【図6】本発明の第一実施例に係る階段昇降装置の左側面図である。
【図7】支持多角形の説明図である。
【図8】図3の破線領域VIIIに対応する図である。
【図9】図6の破線領域IXに対応する図である。
【図10】第一実施例において第一リンク機構又は第二リンク機構を伸縮させるときの第一電磁ブレーキ、第二電磁ブレーキ、及び第三電磁ブレーキの目標動作状態を示す表である。
【図11】階段昇降装置の機能ブロック図である。
【図12】本発明の第一実施例に係る階段昇降装置が階段で被昇降物を昇降させる動作を説明する図である。
【図13】本発明の第二実施例に係る階段昇降装置の背面斜視図である。
【図14】本発明の第二実施例に係る階段昇降装置の背面図である。
【図15】本発明の第二実施例に係る階段昇降装置の前面斜視図である。
【図16】本発明の第二実施例に係る階段昇降装置の上面図である。
【図17】本発明の第二実施例に係る階段昇降装置の左側面図である。
【図18】図14の破線領域XVIIIに対応する図である。
【図19】第二実施例において第一リンク機構又は第二リンク機構を伸縮させるときの第一電磁ブレーキ、第二電磁ブレーキ、及び第三電磁ブレーキ、並びに、第一電磁石プーリ〜第六電磁力プーリの目標動作状態を示す表である。
【発明を実施するための形態】
【0010】
以下、図面を参照しつつ、本発明の実施例について説明する。
【0011】
図1は、本発明に係る階段昇降装置の概略側面図である。階段昇降装置は、階段で被昇降物(図示せず。)を昇降させる装置である。階段昇降装置は、主に、第一支持部S1、第二支持部S2、第三支持部S3、第一リンク機構ST1、第二リンク機構ST2で構成される。なお、図1(A)は、第一リンク機構ST1及び第二リンク機構ST2を伸ばした状態を示し、図1(B)は、第二リンク機構ST2を伸ばしたまま第一リンク機構ST1を縮めた状態を示し、図1(C)は、第一リンク機構ST1を伸ばしたまま第二リンク機構ST2を縮めた状態を示す。
【0012】
第一支持部S1は、第一リンク機構ST1を支持する部材であり、第二支持部S2は、第二リンク機構ST2を支持する部材であり、第三支持部S3は、被昇降物(図示せず。)を支持する部材である。なお、被昇降物は、例えば、第三支持部S3の上面、下面、側面の何れかにボルト等を用いて締め付けられたものであってもよく、第三支持部S3の上面に載せられたものであってもよい。
【0013】
第一リンク機構ST1は、回転関節を利用して鉛直軸V1方向に伸縮する直動機構であり、主に、第一電動モータM1、第一リンクL1、第二リンクL2、第一ベルトB1、及び第二ベルトB2で構成される。
【0014】
第二リンク機構ST2は、回転関節を利用して水平軸V1方向に伸縮する直動機構であり、主に、第二電動モータM2、第三リンクL3、第四リンクL4、第三ベルトB3、及び第四ベルトB4で構成される。
【0015】
図1(A)及び図1(B)で示すように、第一リンク機構ST1は、第一モータM1の駆動軸が第一方向に回転すると、第一リンクL1と第二リンクL2との間の角度αが小さくなるように、第一リンクL1及び第二リンクL2を動作させる。この場合、第一リンク機構ST1は、図1(A)の状態に比べて、第三支持部S3の位置、すなわち被昇降物の位置を、図1(B)に示すように、距離D1だけ下方に移動させることができる。
【0016】
また、第一リンク機構ST1は、第一モータM1の駆動軸が第一方向とは逆の第二方向に回転すると、第一リンクL1と第二リンクL2との間の角度αが大きくなるように、第一リンクL1及び第二リンクL2を動作させる。この場合、第一リンク機構ST1は、図1(B)の状態に比べて、第三支持部S3の位置、すなわち被昇降物の位置を、図1(A)に示すように、距離D1だけ上方に移動させることができる。
【0017】
なお、明瞭化のため、図1(B)では第一ベルトB1及び第二ベルトB2の図示が省略されている。
【0018】
同様に、図1(A)及び図1(C)で示すように、第二リンク機構ST2は、第二モータM2の駆動軸が第一方向に回転すると、第三リンクL3と第四リンクL4との間の角度βが小さくなるように、第三リンクL3及び第四リンクL4を動作させる。この場合、第二リンク機構ST2は、図1(A)の状態に比べて、第三支持部S3の位置、すなわち被昇降物の位置を、図1(C)に示すように、距離D2だけ左方に移動させることができる。
【0019】
また、第二リンク機構ST2は、第二モータM2の駆動軸が第一方向とは逆の第二方向に回転すると、第三リンクL3と第四リンクL4との間の角度βが大きくなるように、第三リンクL3及び第四リンクL4を動作させる。この場合、第二リンク機構ST2は、図1(C)の状態に比べて、第三支持部S3の位置、すなわち被昇降物の位置を、図1(A)に示すように、距離D2だけ右方に移動させることができる。
【0020】
なお、明瞭化のため、図1(C)では第一ベルトB1及び第二ベルトB2の図示が省略されている。
【0021】
以上の構成により、階段昇降装置は、二つの電動モータM1、M2を用いて、第一リンク機構ST1及び第二リンク機構ST2のそれぞれを独立して動作させ、被昇降物の位置を上下及び前後に移動させながら、階段で被昇降物を昇降させることができる。このように、階段昇降装置は、コンパクトな構成を採用しながらも、階段で被昇降物を昇降させることができる。
【0022】
また、階段昇降装置は、回転関節を利用した直動機構を採用するため、レールを利用したスライド機構やピニオン・ラック機構等に比べ、全体構成をよりコンパクトにすることができる。
【0023】
以下では、より具体的な実施例を参照しながら、本発明に係る階段昇降装置の詳細について説明する。特に、以下の二つの実施例は、電動モータを二つ用いて二つのリンク機構のそれぞれを独立して動作させる代わりに、二つの電動モータのそれぞれの機能を兼ねる一つの電動モータとその電動モータの駆動力の伝達先を切り替える切り替え機構とを用いて二つのリンク機構のそれぞれを順番に動作させる。但し、以下の二つの実施例は、二つの電動モータを用いる態様を除外するものではなく、一つの電動モータと切り替え機構とを用いる代わりに、切り替え機構を省略しながら二つの電動モータを用いる態様を採用してもよい。
【実施例1】
【0024】
図2〜図6は、本発明の第一実施例に係る階段昇降装置100の概略図であり、図2が背面斜視図を示し、図3が背面図を示し、図4が前面斜視図を示す。また、図5が上面図を示し、図6が左側面図を示す。
【0025】
階段昇降装置100は、主に、制御部1、第一支持部5、駆動部10、第一回転方向変換機構30、回転伝達機構40、第二回転方向変換機構50、第二支持部60、第一リンク機構70、第三支持部80、及び第二リンク機構90で構成される。
【0026】
制御部1は、階段昇降装置100の動きを制御する機能要素であり、例えば、CPU(Central Processing Unit)、RAM(Random Access Memory)、ROM(Read Only Memory)等を備えたコンピュータである。制御部1は、操作者の指示に応じて階段昇降装置100を動作させるために、或いは、各種情報に基づいて自動的に階段昇降装置100を動作させるために、駆動部10を制御する。
【0027】
第一支持部5は、第一リンク機構70を支持するための機能要素であり、例えば、床面と接触しながら支持多角形を形成する、上面視で馬蹄形の補助足である。
【0028】
なお、「支持多角形」は、階段昇降装置100と床面と間の接地点群を凸状に張った辺で構成される凸多角形であり、曲線を含む概念である。
【0029】
図7は、支持多角形の説明図であり、図7(A)は、第一支持部5(破線領域)によって形成される支持多角形(斜線ハッチング領域)を示し、図7(B)は、第一支持部5と一つの付加的な接地点AP1とによって形成される支持多角形を示し、図7(C)は、第一支持部5と二つの付加的な接地点AP2、AP3とによって形成される支持多角形を示す。
【0030】
このように、第一支持部5によって形成される支持多角形は、その支持多角形の外に付加的な接地点が追加された場合には、その付加的な接地点を含む支持多角形にまでその領域が拡大される。
【0031】
また、第一支持部5は、上面視でU字型、C字型、H字型、E字型等の他の形状を有するものであってもよい。
【0032】
駆動部10は、第一リンク機構70及び第二リンク機構90を伸縮させる機能要素であり、例えば、電動モータ11、第一回転軸12、第一電磁ブレーキ13、第二電磁ブレーキ14、第二回転軸15、及び第三電磁ブレーキ16で構成される。
【0033】
電動モータ11は、バッテリ等の電源から供給される電力により回転駆動される機能要素であり、例えば、図3で示すように、制御部1からの制御信号に応じ、本体部(ステータ)11aに対して駆動軸11bを相対回転させ、或いは、駆動軸11bに対して本体部11aを相対回転させる。
【0034】
また、電動モータ11は、回転状態(回転方向、回転角度、回転速度等である。)を検出するための回転検出器11c(図示せず。)を備える。回転検出器11cは、例えば、レゾルバ、エンコーダ等であって、その検出値を回転状態情報として所定のサンプリング周期で繰り返し制御部1に対して出力する。
【0035】
第一回転軸12は、電動モータ11の駆動軸11bに連結される機能要素であり、第一支持部5によって軸支されて駆動軸11bと共に回転し、第一リンク機構70を伸縮できるように第一リンク機構70に係合される。
【0036】
第一電磁ブレーキ13は、バッテリ等の電源から供給される電力により第一回転軸12の回転を制動するための制動力を制御する機能要素であり、例えば、制御部1からの制御信号に応じて、第一回転軸12の回転を制動するための制動力を発生させ、或いはその制動力を解除する。
【0037】
また、第一電磁ブレーキ13は、制動力を発生させているか否か、すなわち動作状態か非動作状態かを動作状態情報として所定のサンプリング周期で繰り返し制御部1に対して出力する。
【0038】
第二電磁ブレーキ14は、バッテリ等の電源から供給される電力により電動モータ11の本体部11aの回転を制動するための制動力を制御する機能要素であり、例えば、制御部1からの制御信号に応じて、電動モータ11の本体部11aの回転を制動するための制動力を発生させ、或いはその制動力を解除する。
【0039】
また、第二電磁ブレーキ14は、第一電磁ブレーキ13と同様、制動力を発生させているか否か、すなわち動作状態か非動作状態かを動作状態情報として所定のサンプリング周期で繰り返し制御部1に対して出力する。
【0040】
第二回転軸15は、電動モータ11の本体部11aに間接的に連結される機能要素であり、第二支持部60によって軸支されて本体部11aと共に回転し、第二リンク機構90を伸縮できるように第二リンク機構90に係合される。
【0041】
第三電磁ブレーキ16は、バッテリ等の電源から供給される電力により第二回転軸15の回転を制動するための制動力を制御する機能要素であり、例えば、制御部1からの制御信号に応じて、第二回転軸15の回転を制動するための制動力を発生させ、或いはその制動力を解除する。
【0042】
また、第三電磁ブレーキ16は、第一電磁ブレーキ13及び第二電磁ブレーキ14と同様、制動力を発生させているか否か、すなわち動作状態か非動作状態かを動作状態情報として所定のサンプリング周期で繰り返し制御部1に対して出力する。
【0043】
第一回転方向変換機構30は、駆動部10の回転駆動力を、駆動部10の回転軸とは異なる回転軸周りの回転駆動力に変換するための機構であり、例えば、駆動部10の回転駆動力を、駆動部10の回転軸と直交する回転軸の周りの回転駆動力に変換する。
【0044】
具体的には、第一回転方向変換機構30は、例えば、傘歯車31、32、支持ボックス33で構成される。
【0045】
ここで、図8を参照しながら、第一回転方向変換機構30の詳細について説明する。なお、図8は、図3の破線領域VIIIに対応する図であり、支持ボックス33の内部を断面図で示す。
【0046】
傘歯車31は、電動モータ11の本体部11aと共に回転するよう本体部11aに結合される。傘歯車32は、回転伝達機構40と共に回転するよう回転伝達機構40に結合される。支持ボックス33は、傘歯車31の回転軸31Xを回転可能に支持する軸受33a、及び、傘歯車32の回転軸32Xを回転可能に支持する軸受33bを備える。また、支持ボックス33は、傘歯車31の回転軸31Xと傘歯車32の回転軸32Xとが直交するように、傘歯車31、32を支持する。この構成により、第一回転方向変換機構30は、駆動部10の回転駆動力を、駆動部10の回転軸と直交する回転軸の周りの回転駆動力に変換する。
【0047】
回転伝達機構40は、回転駆動力を伝達する伸縮可能な機構であり、例えば、テレスコープ式のリンク機構を備え、その伸縮方向に伸びる回転軸の周りを回転する。
【0048】
第二回転方向変換機構50は、回転伝達機構40の回転駆動力を、回転伝達機構40の回転軸とは異なる回転軸周りの回転駆動力に変換するための機構であり、例えば、回転伝達機構40の回転駆動力を、回転伝達機構40の回転軸と直交する回転軸の周りの回転駆動力に変換する。第二回転方向変換機構50は、例えば、第一回転方向変換機構30と同様、傘歯車51、52、支持ボックス53で構成される。
【0049】
傘歯車51は、回転伝達機構40と共に回転するよう回転伝達機構40に結合される。傘歯車52は、第二回転軸15と共に回転するよう第二回転軸15に結合される。支持ボックス53は、傘歯車51の回転軸を回転可能に支持する軸受、及び、傘歯車52の回転軸を回転可能に支持する軸受を備える。また、支持ボックス53は、傘歯車51の回転軸と傘歯車52の回転軸とが直交するように、傘歯車51、52を支持する。この構成により、第二回転方向変換機構50は、回転伝達機構40の回転駆動力を、回転伝達機構40の回転軸と直交する回転軸の周りの回転駆動力に変換する。
【0050】
第二支持部60は、第二リンク機構90を支持する機能要素であり、例えば、ガイド部61、スライダ62、連結ピン63、64、軸支部65で構成される。
【0051】
ガイド部61は、第一リンク機構70の二つの上端のうちの一方が枢動可能に連結されたスライダ62を水平方向にスライド可能に支持し、且つ、第一リンク機構70の二つの上端のうちの他方が枢動可能に連結される部材である。
【0052】
スライダ62は、第一リンク機構70の二つの上端のうちの一方が枢動可能に連結される部材であり、第一リンク機構70の伸縮に応じ、ガイド部61に沿ってスライドする。
【0053】
連結ピン63は、第一リンク機構70の二つの上端のうちの一方を枢動可能にスライダ62に連結する部材である。
【0054】
連結ピン64は、第一リンク機構70の二つの上端のうちの他方を枢動可能にガイド部61に連結する部材である。
【0055】
軸支部65は、ガイド部61に固定的に取り付けられる部材であり、駆動部10の第二回転軸15を軸支する。
【0056】
第一リンク機構70は、回転関節を利用した直動機構であり、例えば、ラチス構造を用いて鉛直方向に伸縮可能な直動機構である。
【0057】
具体的には、第一リンク機構70は、一方の側が第一回転軸12を介して第一支持部5に接続され、他方の側が第二支持部60の連結ピン63、64を介して第二支持部60のガイド部61及びスライダ62に接続される。
【0058】
ここで、図9を参照して、第一リンク機構70の動きについて説明する。なお、図9は、図6の破線領域IXに対応する図であり、図9(A)は、第一リンク機構70が展開された(伸長された)状態を示し、図9(B)は、第一リンク機構70が折り畳まれた(短縮された)状態を示す。
【0059】
具体的には、図9(A)に示す状態において駆動部10の電動モータ11が第一回転軸12を第一方向に回転させると、第一リンク機構70が図9(B)で示すように折り畳まれ、テレスコープ式の回転伝達機構40の長さも縮む。より具体的には、第一電磁ブレーキ13の制動力を解除し、且つ、第二電磁ブレーキ14の制動力を発生させた状態で、駆動部10の電動モータ11を第一方向に回転させると、静止した本体部11aに対して駆動軸11bが第一方向に回転する。第一電磁ブレーキ13によって駆動軸11bの回転が制動されることはないが、第二電磁ブレーキ14によって本体部11aの回転が制動されるためである。その結果、駆動部10は、第一回転軸12を第一方向に回転させることができ、第一リンク機構70を折り畳み、且つ、テレスコープ式の回転伝達機構40の長さを短縮できる。なお、電動モータ11の本体部11aが回転しないため、第二回転軸15が回転することはないが、第三電磁ブレーキ16は、第二回転軸15の回転を確実に制動するための制動力を発生させてもよい。また、スライダ62は、図9(A)の矢印AR1で示すように、ガイド部61に沿って図の左方向にスライドし、連結ピン63と連結ピン64との間の距離を大きくして、第一リンク機構70が折り畳まれるようにする。
【0060】
また、図9(B)に示す状態において駆動部10の電動モータ11が第一回転軸12を、第一方向とは反対の第二方向に回転させると、第一リンク機構70が図9(A)で示すように展開され、テレスコープ式の回転伝達機構40の長さも伸びる。より具体的には、第一電磁ブレーキ13の制動力を解除し、且つ、第二電磁ブレーキ14の制動力を発生させた状態で、駆動部10の電動モータ11を第二方向に回転させると、静止した本体部11aに対して駆動軸11bが第二方向に回転する。第一電磁ブレーキ13によって駆動軸11bの回転が制動されることはないが、第二電磁ブレーキ14によって本体部11aの回転が制動されるためである。その結果、駆動部10は、第一回転軸12を第二方向に回転させることができ、第一リンク機構70を展開し、且つ、テレスコープ式の回転伝達機構40の長さを延長できる。この場合も、電動モータ11の本体部11aが回転しないため、第二回転軸15が回転することはないが、第三電磁ブレーキ16は、第二回転軸15の回転を確実に制動するための制動力を発生させてもよい。また、スライダ62は、図9(B)の矢印AR2で示すように、ガイド部61に沿って図の右方向にスライドし、連結ピン63と連結ピン64との間の距離を小さくして、第一リンク機構70が展開されるようにする。
【0061】
第三支持部80は、被昇降物を支持する機能要素であり、例えば、ガイド部81、スライダ82、連結ピン83、84で構成される。
【0062】
ガイド部81は、第二リンク機構90の二つの側端のうちの一方が枢動可能に連結されたスライダ82を鉛直方向にスライド可能に支持し、且つ、第二リンク機構90の二つの側端のうちの他方が枢動可能に連結される部材である。
【0063】
また、ガイド部81は、支持対象の被昇降物が取り付けられる部材であり、例えば、ボトル等の締め付け具を用いて被昇降物に締め付けられる。
【0064】
スライダ82は、第二リンク機構90の二つの側端のうちの一方が枢動可能に連結される部材であり、第二リンク機構90の伸縮に応じ、ガイド部81に沿ってスライドする。
【0065】
連結ピン83は、第二リンク機構90の二つの側端のうちの一方を枢動可能にスライダ82に連結する部材である。
【0066】
連結ピン84は、第二リンク機構90の二つの側端のうちの他方を枢動可能にガイド部81に連結する部材である。
【0067】
第二リンク機構90は、第一リンク機構70と同様に回転関節を利用した直動機構であり、例えば、ラチス構造を用いて水平方向に伸縮可能な機構である。
【0068】
具体的には、第二リンク機構90は、一方の側が第二回転軸15を介して第二支持部60に接続され、他方の側が第三支持部80の連結ピン83、84を介して第三支持部80のガイド部81及びスライダ82に接続される。
【0069】
本実施例において、第二リンク機構90の動きは、第一リンク機構70の動きと同様、駆動部10の回転駆動力によってもたらされる。具体的には、第一電磁ブレーキ13の制動力を発生させ、第二電磁ブレーキ14の制動力を解除し、且つ第三電磁ブレーキ16の制動力を解除した状態で、駆動部10の電動モータ11を第一方向に回転させると、静止した駆動軸11bに対して本体部11aが第二方向に回転する。第二電磁ブレーキ14によって本体部11aの回転が制動されることはないが、第一電磁ブレーキ13によって駆動軸11bの回転が制動されるためである。その結果、駆動部10は、本体部11a、傘歯車31、傘歯車32、回転伝達機構40、傘歯車51、及び傘歯車52を順番に回転させ、第二回転軸15を第一方向に回転させることができ、第二リンク機構90を折り畳むことができる。また、スライダ82は、ガイド部81に沿って鉛直下方向にスライドし、連結ピン83と連結ピン84との間の距離を大きくして、第二リンク機構90が折り畳まれるようにする。
【0070】
また、駆動部10の電動モータ11が第二回転軸15を、第一方向とは反対の第二方向に回転させると、第二リンク機構90が展開される。具体的には、第一電磁ブレーキ13の制動力を発生させ、第二電磁ブレーキ14の制動力を解除し、且つ第三電磁ブレーキ16の制動力を解除した状態で、駆動部10の電動モータ11を第二方向に回転させると、静止した駆動軸11bに対して本体部11aが第一方向に回転する。第二電磁ブレーキ14によって本体部11aの回転が制動されることはないが、第一電磁ブレーキ13によって駆動軸11bの回転が制動されるためである。その結果、駆動部10は、本体部11a、傘歯車31、傘歯車32、回転伝達機構40、傘歯車51、及び傘歯車52を順番に回転させ、第二回転軸15を第二方向に回転させることができ、第二リンク機構90を展開することができる。また、スライダ82は、ガイド部81に沿って鉛直上方向にスライドし、連結ピン83と連結ピン84との間の距離を小さくして、第二リンク機構90が展開されるようにする。
【0071】
図10は、第一リンク機構70又は第二リンク機構90を伸縮させるときの第一電磁ブレーキ13、第二電磁ブレーキ14、及び第三電磁ブレーキ16の目標動作状態を示す。
【0072】
図10の「動作モード」における「鉛直方向伸縮モード」は、第一リンク機構70を展開し或いは折り畳むときの動作に対応し、「動作モード」における「水平方向伸縮モード」は、第二リンク機構90を展開し或いは折り畳むときの動作に対応する。また、図10の「ON」は、電磁ブレーキが動作状態であることを表し、「OFF」は、電磁ブレーキが非動作状態であることを表す。
【0073】
このように、駆動部10の第一電磁ブレーキ13、第二電磁ブレーキ14、及び第三電磁ブレーキ16、並びに、第一回転方向変換機構30、回転伝達機構40、及び第二回転方向変換機構50は、電動モータ11の回転駆動力の伝達先を第一リンク機構70と第二リンク機構90とで切り替える切り替え機構を構成する。具体的には、切り替え機構は、第一リンク機構70を伸縮させるための第一回転軸12の回転と、第二リンク機構90を伸縮させるための第二回転軸15の回転とを切り替える。
【0074】
次に、図11を参照しながら、制御部1の詳細について説明する。なお、図11は、階段昇降装置100の機能ブロック図であり、制御部1は、電動モータ11、第一電磁ブレーキ13、第二電磁ブレーキ14、及び第三電磁ブレーキ16のそれぞれ(以下、「制御対象」とする。)に有線又は無線で接続されるものとする。
【0075】
制御部1は、移動制御部1a、位置検出装置PS、階段情報検出装置SS、及び記憶装置SDを備え、移動制御部1aに対応するプログラムをROMから読み出してRAM上に展開し、位置検出装置PSが出力する検出値と、階段情報検出装置SSが出力する検出値又は記憶装置SDに記憶された情報とに基づいて、移動制御部1aに対応する処理をCPUに実行させる。
【0076】
位置検出装置PSは、階段昇降装置100の位置を検出するための装置であり、例えば、GPS(Global Positioning System)受信機が受信したGPS信号に基づいて階段昇降装置100の位置(緯度、経度、高度)を検出する。
【0077】
また、位置検出装置PSは、昇降対象となる階段までの距離を検出するレーザセンサであってもよい。
【0078】
階段情報検出装置SSは、昇降対象の階段に関する情報を検出するための装置であり、例えば、レーザセンサや超音波センサ等の検出値に基づいて昇降対象の階段の踏み面、蹴上げ等の階段情報を検出する。
【0079】
記憶装置SDは、各種情報を記憶するための装置であり、例えば、ハードディスクやフラッシュメモリ等の不揮発性記憶媒体であって、昇降対象となる階段の階段情報を記憶する。この場合、階段昇降装置100の操作者は、階段昇降装置100に付属の無線操作端末等の操作部(図示せず。)を介して、昇降対象の階段の踏み面、蹴上げ等の階段情報を予め入力する。
【0080】
制御部1の移動制御部1aは、階段昇降装置100を自律的に動作させるための機能要素であり、位置検出装置PSの検出値と、階段情報検出装置SSが検出する階段情報又は記憶装置SDから読み出した階段情報とに基づいて、電動モータ11の目標回転状態、並びに、第一電磁ブレーキ13、第二電磁ブレーキ14、及び第三電磁ブレーキ16のそれぞれの目標動作状態を決定し、決定した目標回転状態及び目標動作状態に関する情報を含む制御信号を制御対象のそれぞれに対して出力する。
【0081】
また、移動制御部1aは、制御対象のそれぞれが出力する回転状態情報及び動作状態情報を所定のサンプリング周期で受信し、制御対象のそれぞれが目標回転状態及び目標動作状態となるよう、制御対象のそれぞれを独立に制御する。
【0082】
次に、図12を参照しながら、階段昇降装置100が階段で被昇降物Vを昇降させる動作について説明する。
【0083】
階段昇降装置100が階段で被昇降物Vを昇降させる際の動きは、図12(A)〜図12(F)の六つの状態で表され、階段を昇る場合、図12(A)〜図12(F)の順で時系列に進行するものとする。なお、階段昇降装置100の動きは、階段を降りる場合には、階段を昇る場合とは逆の順番で時系列に進行する。
【0084】
また、図12(A)〜図12(F)のそれぞれは、階段で被昇降物Vを昇降させる階段昇降装置100の側面図であり、被昇降物Vは、四つの車輪を備えた移動体である。したがって、被昇降物Vは、第一リンク機構70を折り畳んで階段昇降装置100の第一支持部5を床面から浮かせた状態で、階段昇降装置100と共に移動することができる。なお、被昇降物Vは、オムニホイール等の全方向移動機構を備えた移動体であってもよい。
【0085】
図12(A)において、階段昇降装置100は、階段の一段目に被昇降物Vと第一支持部5とを接地させた状態となっている。また、駆動部10の第一電磁ブレーキ13、第二電磁ブレーキ14、及び第三電磁ブレーキ16、並びに、第一回転方向変換機構30、回転伝達機構40、及び第二回転方向変換機構50で構成される切り替え機構の動作モードは、電動モータ11の回転駆動力を第一リンク機構70に伝達する鉛直方向伸縮モード(図10参照。)となっている。
【0086】
図12(B)において、階段昇降装置100は、階段の一段目に第一支持部5を接地させたままの状態で、第一リンク機構70を展開させて被昇降物Vを上方に鉛直移動させる。階段情報検出装置SSが検出した階段情報又は記憶装置SDに記憶された階段情報における階段の蹴上げ分だけ被昇降物Vを上昇させるためである。
【0087】
その後、切り替え機構の動作モードは、鉛直方向伸縮モードから水平方向伸縮モードに切り替えられ、電動モータ11の回転駆動力が第二リンク機構90に伝達されるようにする。
【0088】
図12(C)において、階段昇降装置100は、階段の一段目に第一支持部5を接地させたままの状態で、第二リンク機構90を展開させて被昇降物Vを進行方向(図中右方向)に水平移動させる。
【0089】
このとき、階段昇降装置100は、そのZMP(Zero Moment Point)が、第一支持部5によって形成される支持多角形(図7(A)参照。)内に維持されるよう、所定範囲内の値の加速度で被昇降物Vを進行方向に水平移動させる。
【0090】
「ZMP」とは、重力と慣性力との合力が床面と交差する点であり、加速度が大きい程、進行方向に対する逆方向(以下、「進行逆方向」とする。)に移動する。進行方向における加速度が大きい程、進行逆方向の慣性力が大きくなるためである。そのため、加速度が小さい程、階段昇降装置100のZMPは、被昇降物Vの水平移動距離がより小さい段階で、その支持多角形の進行方向側の境界(図7(A)の境界線BL参照。)から逸脱しやすくなる。仮に、ZMPが支持多角形から逸脱すると、階段昇降装置100は転倒を開始する。これに対し、階段昇降装置100は、被昇降物Vの加速度を所定範囲内の値の加速度とすることで、そのZMPが第一支持部5による支持多角形から逸脱するのを遅らせるようにする(被昇降物Vの加速度がより小さい場合に比べ、被昇降物Vの水平移動距離がより大きくなるまでZMPを支持多角形内に留まらせるようにする。)。
【0091】
その後、階段昇降装置100は、被昇降物Vを階段の二段目に接地させるために、進行方向に水平移動する被昇降物Vを所定の割合で減速させるようにする。仮に、被昇降物Vを減速させると、進行方向を向く慣性力が発生し、ZMPは第一支持部5による支持多角形を進行方向側に大きく逸脱し、階段昇降装置100は転倒を開始する。これに対し、階段昇降装置100は、第一支持部5による支持多角形を拡大し、階段昇降装置100のZMPをその拡大後の支持多角形内に留めるようにする。具体的には、階段昇降装置100は、所定範囲内の値の加速度で被昇降物Vを進行方向に水平移動させている間に、被昇降物Vの車輪を階段の二段目に接地させる。これにより、階段昇降装置100は、第一支持部5による支持多角形(図7(A)参照。)を、その車輪の接地点を含む支持多角形(図7(C)参照。)にまで拡大する。そして、階段昇降装置100は、所定の割合で減速する階段昇降装置100のZMPがその拡大後の支持多角形内に留まるようにして階段昇降装置100の転倒を抑えるようにする。
【0092】
図12(D)において、階段昇降装置100は、被昇降物Vの全ての車輪を階段の二段目に接地させる。その後、切り替え機構の動作モードは、水平方向伸縮モードから鉛直方向伸縮モードに切り替えられ、電動モータ11の回転駆動力が再び第一リンク機構70に伝達されるようにする。
【0093】
図12(E)において、階段昇降装置100は、被昇降物Vの全ての車輪を階段の二段目に接地させたままの状態で、第一リンク機構70を折り畳んで第一支持体5を階段の蹴上げ分だけ上昇させるようにする。その後、切り替え機構の動作モードは、鉛直方向伸縮モードから水平方向伸縮モードに再び切り替えられ、電動モータ11の回転駆動力が再び第二リンク機構90に伝達されるようにする。
【0094】
図12(F)において、階段昇降装置100は、被昇降物Vの全ての車輪を階段の二段目に接地させたままの状態で、第二リンク機構90を折り畳んで第一支持体5を図の右方向に移動させる。このとき、階段昇降装置100は、第一支持体5を階段の二段目に接地させた場合には、接地位置が一段高いのを除き、図12(A)の状態とほぼ同じ状態となる。
【0095】
このようにして、階段昇降装置100は、図12(A)〜図12(F)の六つの状態を繰り返すようにして、被昇降物Vを一段ずつ昇らせることができる。被昇降物Vを一段ずつ降ろす場合も同様である。
【0096】
なお、上述の階段昇降装置100は、所定範囲内の値の加速度で被昇降物Vを進行方向に水平移動させることによって、第一支持部5によって形成される支持多角形内からそのZMPが逸脱するのを遅らせるようにして転倒を防止する。しかしながら、階段昇降装置100は、階段昇降装置100の重心GCの位置を動的に変化させるアクティブバランサ機構を用いることによって、進行方向における被昇降物Vの水平移動速度にかかわらず、第一支持部5によって形成される支持多角形内にその重心GCの床面投影点を留まらせて転倒を防止するようにしてもよい。
【0097】
以上の構成により、階段昇降装置100は、一つの電動モータ11と切り替え機構とを用いて第一リンク機構70及び第二リンク機構90のそれぞれを独立して動作させ、被昇降物Vの位置を上下及び前後に移動させながら、階段で被昇降物Vを昇降させることができる。その結果、階段昇降装置100は、二つの電動モータを利用する構成に比べ、さらにコンパクトで低コストとなる構造を採用しながらも、階段で被昇降物Vを昇降させることができる。なお、階段昇降装置100は、切り替え機構を採用することなく、電動モータ11とは別の電動モータで第二回転軸15を回転させて第二リンク機構90を動作させるようにしてもよい。
【0098】
また、階段昇降装置100は、複数の電磁ブレーキを利用した切り替え機構を採用するため、切り替えタイミングが固定される機械式の切り替え機構を採用した場合に比べ、切り替えタイミングをより柔軟に設定することができる。その結果、階段昇降装置100は、蹴上げ(高さ)や踏み面(奥行き)の異なる複数の階段のそれぞれに対応することができる。
【実施例2】
【0099】
次に、図13〜19を参照しながら、本発明の第二実施例に係る階段昇降装置100Aについて説明する。
【0100】
図13〜図17は、本発明の第二実施例に係る階段昇降装置100Aの概略図であり、図13が背面斜視図を示し、図14が背面図を示し、図15が前面斜視図を示す。また、図16が上面図を示し、図17が左側面図を示す。
【0101】
階段昇降装置100Aは、主に、制御部1、第一支持部5、駆動部10、回転伝達機構40A、第二支持部60、第一リンク機構70、第三支持部80、及び第二リンク機構90で構成される。
【0102】
また、階段昇降装置100Aは、第一回転方向変換機構30、回転伝達機構40、第二回転方向変換機構50の代わりに、回転伝達機構40Aを備える点で、第一実施例に係る階段昇降装置100と相違するが、その他の点で階段昇降装置100と共通する。そのため、以下では、共通点の説明を省略し、また、共通の構成要素を同じ参照符号で参照しながら、相違点を詳細に説明する。
【0103】
回転伝達機構40Aは、回転駆動力を伝達する伸縮可能な機構であり、主に、プーリ41、第一電磁石プーリ42、第二電磁石プーリ43、第三電磁石プーリ44、第四電磁石プーリ45、第五電磁石プーリ46、及び第六電磁石プーリ47で構成される。
【0104】
また、本実施例において、回転伝達機構40Aは、電動モータ11の回転駆動力の伝達先を第一リンク機構70と第二リンク機構90とで切り替える切り替え機構を構成する。具体的には、切り替え機構は、第一リンク機構70を伸縮させるための第一回転軸12の回転と、第二リンク機構90を伸縮させるための第二回転軸15の回転とを切り替える。
【0105】
プーリ41は、電動モータ11の本体部11aに固定され、本体部11aと共に回転するプーリである。
【0106】
第一電磁石プーリ42は、回転軸42Xに対して回転可能に且つ軸方向に移動可能に取り付けられる可動部42aと、回転軸42Xに対して回転可能に且つ軸方向に移動不能に取り付けられる固定部42bとで構成される。
【0107】
また、第一電磁石プーリ42は、制御部1からの制御信号に応じてその動作状態と非動作状態とを切り替える。そして、第一電磁石プーリ42は、動作状態であるか否かを動作状態情報として所定のサンプリング周期で繰り返し制御部1に対して出力する。第二電磁石プーリ43〜第六電磁石プーリ47についても同様である。
【0108】
ここで、図18を参照しながら、第一電磁石プーリ42の動きを説明する。なお、図18は、図14の破線領域XVIIIに対応する図であり、図18(A)が第一電磁石プーリ42の動作状態を示し、図18(B)が第一電磁石プーリ42の非動作状態を示す。
【0109】
また、図18は、代表として第一電磁石プーリ42を参照しながらその動きを説明するが、第二電磁石プーリ43〜第六電磁石プーリ47のそれぞれの動きは、第一電磁石プーリ42の動きと同様である。
【0110】
第一電磁石プーリ42は、バッテリ等の電源から電力の供給を受け、可動部42a及び固定部42bのそれぞれに配置された電磁石で電磁力(引力)を発生させ、可動部42aを固定部42bの方へ引き付ける。その結果、第一電磁石プーリ42は、図18(A)で示すような動作状態となり、可動部42aと固定部42bとを一体回転可能にする。
【0111】
一方、第一電磁石プーリ42は、バッテリ等の電源から電力の供給を受け、可動部42a及び固定部42bのそれぞれに配置された電磁石で電磁力(斥力)を発生させ、可動部42aを固定部42bから遠ざける。その結果、第一電磁石プーリ42は、図18(B)で示すような非動作状態となり、可動部42aと固定部42bとを一体回転不能にする。なお、第一電磁石プーリ42は、斥力を発生させることなく、単に電磁力を消失させるだけで非動作状態をもたらすようにしてもよい。
【0112】
次に、図19を参照しながら、第一リンク機構70又は第二リンク機構90を伸縮させるときの第一電磁ブレーキ13、第二電磁ブレーキ14、及び第三電磁ブレーキ16、並びに、第一電磁石プーリ42〜第六電磁力プーリ47の目標動作状態について説明する。なお、図19の「動作モード」における「鉛直方向伸縮モード」は、第一リンク機構70を展開し或いは折り畳むときの動作に対応し、「動作モード」における「水平方向伸縮モード」は、第二リンク機構90を展開し或いは折り畳むときの動作に対応する。また、図19の「ON」は、電磁ブレーキ、電磁力プーリが動作状態であることを表し、「OFF」は、電磁ブレーキ、電磁力プーリが非動作状態であることを表す。
【0113】
図19の「鉛直方向伸縮モード」で示す設定において駆動部10の電動モータ11が第一回転軸12を第一方向に回転させると、第一リンク機構70が折り畳まれる。より具体的には、第一電磁ブレーキ13の制動力を解除し、且つ、第二電磁ブレーキ14の制動力を発生させた状態で、駆動部10の電動モータ11を第一方向に回転させると、静止した本体部11aに対して駆動軸11bが第一方向に回転する。第一電磁ブレーキ13によって駆動軸11bの回転が制動されることはないが、第二電磁ブレーキ14によって本体部11aの回転が制動されるためである。その結果、駆動部10は、第一回転軸12を第一方向に回転させることができ、第一リンク機構70を折り畳むことができる。なお、電動モータ11の本体部11aが回転しないため、プーリ41が回転することはなく、第一電磁石プーリ42〜第六電磁石プーリ47、及び第二回転軸15が回転することもない。しかしながら、第一電磁石プーリ42〜第六電磁石プーリ47は、非動作状態となるように制御されてもよい。電動モータ11の回転駆動力が第二回転軸15に伝達されるのをより確実に防止するためである。また、第三電磁ブレーキ16は、第二回転軸15の回転を確実に制動するための制動力を発生させてもよい。また、スライダ62は、連結ピン63と連結ピン64との間の距離が大きくなるようにガイド部61に沿ってスライドし、第一リンク機構70が折り畳まれるようにする。
【0114】
また、図19の「鉛直方向伸縮モード」で示す設定において、駆動部10の電動モータ11が第一回転軸12を、第一方向とは反対の第二方向に回転させると、第一リンク機構70が展開される。より具体的には、第一電磁ブレーキ13の制動力を解除し、且つ、第二電磁ブレーキ14の制動力を発生させた状態で、駆動部10の電動モータ11を第二方向に回転させると、静止した本体部11aに対して駆動軸11bが第二方向に回転する。第一電磁ブレーキ13によって駆動軸11bの回転が制動されることはないが、第二電磁ブレーキ14によって本体部11aの回転が制動されるためである。その結果、駆動部10は、第一回転軸12を第二方向に回転させることができ、第一リンク機構70を展開できる。この場合も、電動モータ11の本体部11aが回転しないため、プーリ41が回転することはなく、第一電磁石プーリ42〜第六電磁石プーリ47、及び第二回転軸15が回転することもない。しかしながら、第一電磁石プーリ42〜第六電磁石プーリ47は、非動作状態となるように制御されてもよい。電動モータ11の回転駆動力が第二回転軸15に伝達されるのをより確実に防止するためである。また、第三電磁ブレーキ16は、第二回転軸15の回転を確実に制動するための制動力を発生させてもよい。また、スライダ62は、連結ピン63と連結ピン64との間の距離が小さくなるようにガイド部61に沿ってスライドし、第一リンク機構70が展開されるようにする。
【0115】
また、図19の「水平方向伸縮モード」で示すように、第一電磁ブレーキ13の制動力を発生させ、第二電磁ブレーキ14の制動力を解除し、且つ第三電磁ブレーキ16の制動力を解除した状態で、駆動部10の電動モータ11を第二方向に回転させると、静止した駆動軸11bに対して本体部11aが第一方向に回転する。第二電磁ブレーキ14によって本体部11aの回転が制動されることはないが、第一電磁ブレーキ13によって駆動軸11bの回転が制動されるためである。その結果、駆動部10は、本体部11a、プーリ41、第一電磁石プーリ42(動作状態)、第二電磁石プーリ43(動作状態)、第三電磁石プーリ44(動作状態)、第四電磁石プーリ45(動作状態)、第五電磁石プーリ46(動作状態)、及び第六電磁石プーリ47(動作状態)を順番に回転させ、第二回転軸15を第一方向に回転させることができ、第二リンク機構90を折り畳むことができる。また、スライダ82は、連結ピン83と連結ピン84との間の距離が大きくなるようにガイド部81に沿って鉛直下方向にスライドし、第二リンク機構90が折り畳まれるようにする。
【0116】
また、図19の「水平方向伸縮モード」で示す設定において、駆動部10の電動モータ11が第二回転軸15を、第二方向とは反対の第一方向に回転させると、第二リンク機構90が展開される。具体的には、第一電磁ブレーキ13の制動力を発生させ、第二電磁ブレーキ14の制動力を解除し、且つ第三電磁ブレーキ16の制動力を解除した状態で、駆動部10の電動モータ11を第一方向に回転させると、静止した駆動軸11bに対して本体部11aが第二方向に回転する。第二電磁ブレーキ14によって本体部11aの回転が制動されることはないが、第一電磁ブレーキ13によって駆動軸11bの回転が制動されるためである。その結果、駆動部10は、本体部11a、プーリ41、第一電磁石プーリ42(動作状態)、第二電磁石プーリ43(動作状態)、第三電磁石プーリ44(動作状態)、第四電磁石プーリ45(動作状態)、第五電磁石プーリ46(動作状態)、及び第六電磁石プーリ47(動作状態)を順番に回転させ、第二回転軸15を第二方向に回転させることができ、第二リンク機構90を展開することができる。また、スライダ82は、連結ピン83と連結ピン84との間の距離が小さくなるようガイド部81に沿って鉛直上方向にスライドし、第二リンク機構90が展開されるようにする。
【0117】
以上の構成により、階段昇降装置100Aは、一つの電動モータ11と切り替え機構としての回転伝達機構40Aとを用いて第一リンク機構70及び第二リンク機構90のそれぞれを独立して動作させ、被昇降物Vの位置を上下及び前後に移動させながら、階段で被昇降物Vを昇降させることができる。その結果、階段昇降装置100Aは、二つの電動モータを利用する構成に比べ、さらにコンパクトで低コストとなる構造を採用しながらも、階段で被昇降物Vを昇降させることができる。
【0118】
また、階段昇降装置100Aは、複数の電磁ブレーキを利用した切り替え機構を採用するため、切り替えタイミングが固定される機械式の切り替え機構を採用した場合に比べ、切り替えタイミングをより柔軟に設定することができる。その結果、階段昇降装置100は、蹴上げ(高さ)や踏み面(奥行き)の異なる複数の階段のそれぞれに対応することができる。
【0119】
以上、本発明の好ましい実施例について詳説したが、本発明は、上述した実施例に制限されることはなく、本発明の範囲を逸脱することなしに上述した実施例に種々の変形及び置換を加えることができる。
【0120】
例えば、上述の実施例において、階段昇降装置100、100Aは、自律的に動作するものとして説明されているが、階段昇降装置100、100Aから延びるコード等に接続される操作部(例えば、十字カーソルを備えたコントローラである。)を通じて操作者が手動で操作するものであってもよく、無線操作端末等を介した遠隔操作によって操作者が手動で操作するものであってもよい。
【0121】
また、上述の実施例において、階段昇降装置100、100Aは、階段で被昇降物を昇降させるために用いられるが、被昇降物が溝や段差を跨ぐのを補助するために用いられてもよい。
【0122】
また、上述の実施例は、被昇降物Vが4つの車輪を備えた移動体である例について説明するが、車輪の数は適宜選択され得るものである。また、被昇降物Vは、車輪を備えていなくてもよい。
【符号の説明】
【0123】
1・・・制御部 1a・・・移動制御部 5・・・第一支持部 10・・・駆動部 11・・・電動モータ 11a・・・本体部 11b・・・駆動軸 12・・・第一回転軸 13・・・第一電磁ブレーキ 14・・・第二電磁ブレーキ 15・・・第二回転軸 16・・・第三電磁ブレーキ 30・・・第一回転方向変換機構 31、32・・・傘歯車 31X、32X・・・回転軸 33・・・支持ボックス 33a、33b・・・軸受 40・・・回転伝達機構 41・・・プーリ 42〜47・・・電磁石プーリ 42a〜47a・・・可動部 42b〜47b・・・固定部 42X〜47X・・・回転軸 50・・・第二回転方向変換機構 51、52・・・傘歯車 53・・・支持ボックス 60・・・第二支持部 61・・・ガイド部 62・・・スライダ 63、64・・・連結ピン 65・・・軸支部 70・・・第一リンク機構 80・・・第三支持部 81・・・ガイド部 82・・・スライダ 83、84・・・連結ピン 90・・・第二リンク機構 100、100A・・・階段昇降装置 AP1〜AP3・・・接地点 B1〜B4・・・ベルト BL・・・境界線 H1・・・水平軸 L1〜L4・・・リンク M1、M2・・・電動モータ PS・・・位置検出装置 S1〜S3・・・支持部 SS・・・階段情報検出装置 SD・・・記憶装置 ST1、ST2・・・リンク部 V・・・被昇降物 V1・・・鉛直軸
【特許請求の範囲】
【請求項1】
階段で被昇降物を昇降させる階段昇降装置であって、
鉛直方向に伸縮する第一リンク機構と、
水平方向に伸縮する第二リンク機構と、
前記第一リンク機構の一方の側に接続される足と、を備え、
前記第二リンク機構の一方の側は、前記第一リンク機構の他方の側に接続され、
前記被昇降物は、前記第二リンク機構の他方の側で支持される、
ことを特徴とする階段昇降装置。
【請求項2】
前記第一リンク機構及び前記第二リンク機構を伸ばし、前記足を第一の階段面に載せた状態で前記被昇降物を第二の階段面に載せる、
ことを特徴とする請求項1に記載の階段昇降装置。
【請求項3】
前記第一リンク機構及び前記第二リンク機構を縮め、前記被昇降物を前記第二の階段面に載せた状態で前記足を前記第二の階段面に載せる、
ことを特徴とする請求項1又は2に記載の階段昇降装置。
【請求項4】
前記第一リンク機構を伸縮する第一モータと、
前記第二リンク機構を伸縮する第二モータと、を備える、
ことを特徴とする請求項1乃至3の何れか一項に記載の階段昇降装置。
【請求項5】
前記第一モータは、前記第二モータを兼ねる、
ことを特徴とする請求項4に記載の清掃装置。
【請求項6】
前記第一モータの駆動力の伝達先を前記第一リンク機構と前記第二リンク機構とで切り替える切り替え機構を備える、
ことを特徴とする請求項5に記載の清掃装置。
【請求項1】
階段で被昇降物を昇降させる階段昇降装置であって、
鉛直方向に伸縮する第一リンク機構と、
水平方向に伸縮する第二リンク機構と、
前記第一リンク機構の一方の側に接続される足と、を備え、
前記第二リンク機構の一方の側は、前記第一リンク機構の他方の側に接続され、
前記被昇降物は、前記第二リンク機構の他方の側で支持される、
ことを特徴とする階段昇降装置。
【請求項2】
前記第一リンク機構及び前記第二リンク機構を伸ばし、前記足を第一の階段面に載せた状態で前記被昇降物を第二の階段面に載せる、
ことを特徴とする請求項1に記載の階段昇降装置。
【請求項3】
前記第一リンク機構及び前記第二リンク機構を縮め、前記被昇降物を前記第二の階段面に載せた状態で前記足を前記第二の階段面に載せる、
ことを特徴とする請求項1又は2に記載の階段昇降装置。
【請求項4】
前記第一リンク機構を伸縮する第一モータと、
前記第二リンク機構を伸縮する第二モータと、を備える、
ことを特徴とする請求項1乃至3の何れか一項に記載の階段昇降装置。
【請求項5】
前記第一モータは、前記第二モータを兼ねる、
ことを特徴とする請求項4に記載の清掃装置。
【請求項6】
前記第一モータの駆動力の伝達先を前記第一リンク機構と前記第二リンク機構とで切り替える切り替え機構を備える、
ことを特徴とする請求項5に記載の清掃装置。
【図1】


【図7】
【図9】
【図10】
【図11】
【図19】
【図2】
【図3】
【図4】
【図5】
【図6】
【図8】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図7】
【図9】
【図10】
【図11】
【図19】
【図2】
【図3】
【図4】
【図5】
【図6】
【図8】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公開番号】特開2013−49508(P2013−49508A)
【公開日】平成25年3月14日(2013.3.14)
【国際特許分類】
【出願番号】特願2011−187939(P2011−187939)
【出願日】平成23年8月30日(2011.8.30)
【出願人】(000002107)住友重機械工業株式会社 (2,241)
【公開日】平成25年3月14日(2013.3.14)
【国際特許分類】
【出願日】平成23年8月30日(2011.8.30)
【出願人】(000002107)住友重機械工業株式会社 (2,241)
[ Back to top ]