
障害物存在可能性検出装置及び障害物検出装置

【課題】 障害物の誤検出を防止すると共に障害物の検出タイミングを早めることができるようにすること。
【解決手段】 自車両の走行環境をナビゲーションシステム17で検出し、その検出結果に基づいて、自車両前方に障害物が存在する可能性の大きさを検出し、車間距離センサ12で先行車両を継続して検出できた時間が先行車検知時間以上であるときに当該先行車両を走行車線上の障害物であると判断し、さらに渋滞等で障害物が存在する可能性が大きいときには前記先行車検知時間を小さくすると共に、前記可能性が小さいときには前記先行車検知時間を大きくするようにした。
【解決手段】 自車両の走行環境をナビゲーションシステム17で検出し、その検出結果に基づいて、自車両前方に障害物が存在する可能性の大きさを検出し、車間距離センサ12で先行車両を継続して検出できた時間が先行車検知時間以上であるときに当該先行車両を走行車線上の障害物であると判断し、さらに渋滞等で障害物が存在する可能性が大きいときには前記先行車検知時間を小さくすると共に、前記可能性が小さいときには前記先行車検知時間を大きくするようにした。
【発明の詳細な説明】
【0001】
【発明の属する技術分野】この発明は、自車両前方に、自車両の走行を妨げる低速走行車両や停止車両といった障害物が存在する可能性の大きさを検出する障害物存在可能性検出装置及びそれを用いた障害物検出装置に関する。
【0002】
【従来の技術】従来、自車両前方の障害物を検出する装置としては、特開平9−263159号公報に記載されている「車両の速度制御装置」が知られている。この従来例には、自車両の走行車線上に停止している物体に比べて、路肩に停止している物体はレーザレーダ等の車間距離検出センサの走査範囲から直ぐに外れてしまうという特性を利用して、車間距離検出センサで停止物体を継続して検出できた時間が閾値以下の場合は当該停止物体は路肩にあると判断し、また前記閾値以上の場合は当該停止物体は自車両の走行車線上にあると判断して障害物を検出すると共に、その障害物を回避するために制御によってブレーキを作動する技術が開示されている。
【0003】
【発明が解決しようとする課題】しかしながら、上記従来例にあっては、停止物体が走行車線上にあると判断するための閾値を大きくすると、路肩にある停止物体を走行車線上にある障害物であると誤検出する可能性は小さくなるものの、停止物体が障害物であることを検出するまでの時間は大きくなってしまい、制御によりブレーキを作動するタイミングが遅くなって、乗員に違和感を与えてしまう恐れがあった。
【0004】また、前記閾値を小さくすると、停止物体が障害物であることを検出するまでの時間は小さくなるものの、障害物を誤検出する可能性は大きくなってしまい、障害物が存在しないときにも制御によりブレーキが作動して、乗員に違和感を与えてしまう恐れがあった。そこで、本発明は上記従来の技術の未解決の問題点に着目してなされたものであって、障害物の誤検出を防止すると共に障害物の検出タイミングを早めることができる障害物存在可能性検出装置及びそれを用いた障害物検出装置を提供することを課題とする。
【0005】
【課題を解決するための手段】上記課題を解決するために、請求項1に係る発明である障害物存在可能性検出装置は、自車両の走行環境を検出する走行環境検出手段と、前記走行環境検出手段で検出された走行環境に基づいて、自車両前方に障害物が存在する可能性の大きさを検出する障害物存在可能性検出手段と、を備えたことを特徴とする。また、請求項2に係る発明は、請求項1に記載の発明である障害物存在可能性検出装置において、前記走行環境検出手段は、自車位置情報と地図情報とに基づいて、自車両前方に、踏切、一旦停止、分岐、合流及び料金所の少なくとも一つがあることを検出し、前記障害物存在可能性検出手段は、前記走行環境検出手段で踏切、一旦停止、分岐、合流及び料金所の少なくとも一つがあることが検出されたときに、自車両前方に障害物が存在する可能性が大きいと判断することを特徴とする。
【0006】さらに、請求項3に係る発明は、請求項1又は請求項2に記載の発明である障害物存在可能性検出装置において、前記走行環境検出手段は、自車両近傍に自動料金収受システムのゲートがあることを検出するゲート存在検出手段と、自車両が自動料金収受システムのゲートを通過したことを検出するゲート通過検出手段と、を有し、前記障害物存在可能性検出手段は、前記ゲート存在検出手段で自動料金収受システムがあることが検出されてから、前記ゲート通過手段で当該自動料金収受システムのゲートを通過したことが検出されるまでは、自車両前方に障害物が存在する可能性が大きいと判断し、前記ゲート通過手段で当該ゲートを通過したことが検出されてからは前記可能性が小さいと判断することを特徴とする。
【0007】また、請求項4に係る発明は、請求項1乃至請求項3のいずれかに記載の発明である障害物存在可能性検出装置において、前記走行環境検出手段は、外部からの情報に基づいて、自車両前方の渋滞、赤信号、工事、事故及び路上落下物の少なくとも一つを検出し、前記障害物存在可能性検出手段は、前記走行環境検出手段で渋滞及び赤信号の少なくとも一つが検出されたときに、自車両前方に障害物が存在する可能性が大きいと判断することを特徴とする。
【0008】一方、請求項5に係る発明である障害物検出装置は、前記請求項1乃至請求項4のいずれかの障害物存在可能性検出装置と、自車両前方に存在する物体を検出する物体検出手段と、前記物体検出手段で検出された物体が障害物であることを検出する障害物検出手段と、を備え、前記障害物検出手段は、前記障害物存在可能性検出装置で判断される前記可能性の大きさに応じて、前記物体検出手段で検出された物体が障害物であることを検出する方法を変更することを特徴とする。
【0009】また、請求項6に係る発明は、請求項5に記載の発明である障害物存在可能性検出装置において、前記障害物検出手段は、前記物体検出手段で検出された物体のうち移動速度が所定値より小さいものを検出する障害物候補検出手段と、自車両の将来の軌道を推定する軌道推定手段と、前記障害物候補検出手段で検出された物体が前記軌道推定手段で推定された軌道から所定範囲内にあるときに当該物体が障害物であると判断する障害物判断手段と、を有し、前記障害物判断手段は、前記障害物存在可能性検出装置で自車両前方に障害物が存在する可能性が大きいと判断されたときに前記所定範囲を大きく設定し、自車両前方に障害物が存在する可能性が小さいと判断されたときに前記所定範囲を小さく設定することを特徴とする。
【0010】さらに、請求項7に係る発明は、請求項5又は請求項6に記載の発明である障害物存在可能性検出装置において、前記障害物判断手段は、前記物体検出手段で検出された物体のうち移動速度が所定値より小さいものを検出する障害物候補検出手段と、前記障害物候補検出手段で所定時間以上継続して検出されている物体があるときに当該物体が障害物であると判断する障害物判断手段と、を有し、前記障害物判断手段は、前記障害物存在可能性検出装置で自車両前方に障害物が存在する可能性が大きいと判断されたときに前記所定時間を小さく設定し、自車両前方に障害物が存在する可能性が小さいと判断されたときに前記所定時間を大きく設定することを特徴とする。
【0011】
【発明の効果】したがって、請求項1に係る発明である障害物存在可能性検出装置にあっては、自車両の走行環境を検出し、その走行環境に基づいて、自車両前方に障害物が存在する可能性の大きさを検出するため、例えば停止物体を継続して検出できた時間が閾値以上である場合に当該停止物体を走行車線上の障害物であると判断する障害物検出装置に適用すれば、渋滞等で障害物が存在する可能性が大きいときには前記閾値を小さくして障害物の検出タイミングを早めることができ、前記可能性が小さいときには前記閾値を大きくして障害物の誤検出を抑制することができる。
【0012】また、請求項2に係る発明である障害物存在可能性検出装置にあっては、自車位置情報と地図情報とに基づいて、自車両前方に、踏切、一旦停止、分岐、合流及び料金所の少なくとも一つがあることが検出されたときに、自車両前方に障害物が存在する可能性が大きいと判断するため、障害物が存在する可能性の大きさを地図情報や外部情報等に基づいて容易に検出することができる。さらに、請求項3に係る発明である障害物存在可能性検出装置にあっては、例えばナビゲーションシステム等によって、自車両近傍に自動料金収受システムがあることが検出されてから、当該自動料金収受システムの車載器等によってゲートを通過したことが検出されるまでは、自車両前方に障害物が存在する可能性が大きいと判断し、当該ゲートを通過したことが検出されてからは前記可能性が小さいと判断するため、障害物が存在する可能性の大きさを容易に検出することができる。また、自動料金収受システムのゲートを通過したことを検出する手段として、例えば自動料金収受システムの車載器を用いれば、当該ゲートを通過したことを精度良く検出することができる。
【0013】また、請求項4に係る発明である障害物存在可能性検出装置にあっては、例えば路側に設置されているVICS(Vehicle Information and Communication System)等から送信される外部情報に基づいて、自車両前方に渋滞、赤信号、工事、事故及び路上落下物の少なくとも一つがあることが検出されたときに、自車両前方に障害物が存在する可能性が大きいと判断するため、障害物が存在する可能性の大きさを外部情報等に基づいて容易に検出することができる。
【0014】一方、請求項5に係る発明である障害物検出装置にあっては、自車両前方に存在する物体を検出し、その物体が障害物であることを検出すると共に、前記請求項1乃至請求項4のいずれかの障害物存在可能性検出装置で判断される前記可能性の大きさに応じて、前記物体が障害物であることを検出する方法を変更するため、例えば停止物体を継続して検出できた時間が閾値以上であるときに当該停止物体を障害物であると判断するようにし、且つ、渋滞等で障害物が存在する可能性が大きいときには前記閾値を小さくして障害物の検出タイミングを早めることができ、前記可能性が小さいときには前記閾値を大きくして障害物の誤検出を抑制することができる。
【0015】また、請求項6に係る発明である障害物検出装置にあっては、自車両前方に存在する物体のうち移動速度が所定値より小さいものが、自車両の将来の軌道から所定範囲内にあるときに当該物体が障害物であると判断すると共に、自車両前方に障害物が存在する可能性が大きいと判断されたときに前記所定範囲を大きく設定し、自車両前方に障害物が存在する可能性が小さいと判断されたときに前記所定範囲を小さく設定するため、例えば渋滞等で障害物が存在する可能性が大きいときには前記所定範囲を大きくして障害物の検出タイミングを早めることができ、前記可能性が小さいときには前記所定範囲を小さくして障害物の誤検出を抑制することができる。
【0016】さらに、請求項7に係る発明である障害物検出装置にあっては、自車両前方に存在する物体のうち移動速度が所定値より小さいものを検出し、それらのうちに所定時間以上継続して検出されている物体があるときに当該物体が障害物であると判断すると共に、自車両前方に障害物が存在する可能性が大きいと判断されたときに前記所定時間を小さく設定し、自車両前方に障害物が存在する可能性が小さいと判断されたときに前記所定時間を大きく設定するため、例えば渋滞等で障害物が存在する可能性が大きいときには前記所定時間を小さくして障害物の検出タイミングを早めることができ、前記可能性が小さいときには前記所定時間を大きくして障害物の誤検出を抑制することができる。
【0017】
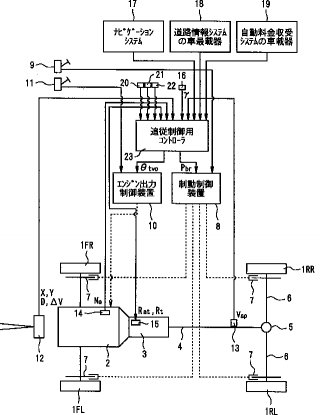
【発明の実施の形態】図1は、本発明の第1の実施形態を示す概略構成図であって、図中、1FL、1FRは従動輪としての前輪、1RL、1RRは駆動輪としての後輪であって、後輪1RL、1RRは、エンジン2の駆動力が自動変速機3、プロペラシャフト4、最終減速装置5及び車軸6を介して伝達されて回転駆動される。前輪1FL、1FR及び後輪1RL、1RRには、夫々制動力を発生するブレーキアクチュエータとしてのディスクブレーキ7が設けられていると共に、これらディスクブレーキ7の制動油圧が制動制御装置8によって制御される。
【0018】ここで、制動制御装置8は、ブレーキペダルストロークセンサ9が検出したブレーキペダルの踏込量に応じて制動油圧を発生すると共に、後述する追従制御用コントローラ23からの制動圧指令値Pbrに応じて制動油圧を発生するように構成されている。また、エンジン2には、その出力を制御するエンジン出力制御装置10が設けられている。このエンジン出力制御装置10は、アクセルペダルストロークセンサ11が検出したアクセルペダルの踏込量及び後述する追従制御用コントローラ23からのスロットル開度指令値θtvoに応じて、エンジン2に設けられたスロットル開度を調整するスロットルアクチュエータを制御するように構成される。
【0019】一方、車両の前方側の車体下部には、レーザ光を掃射して先行車両からの反射光を受光するレーダ方式の構成を有する車間距離センサ12が設けられている。車間距離センサ12では、レーザ光を掃射してから先行車両の反射光を受光するまでの時間を計測して、自車両と先行車両との間の相対前後位置X、相対横位置Y及び車間距離Dを検出すると共に、その車間距離Dの検出値を微分して自車両と先行車両との相対速度△Vを算出し、それらを追従制御用コントローラ23に出力するようになっている。なお、車間距離Dから相対速度△Vを算出する方法としては、車間距離Dの検出値を微分するやり方に変えて、例えば、バンドバスフィルターを用いるようにしてもよい。また、車間距離センサ12は、車間距離Dを検出できるものであればよく、レーザ光に変えて、電波や超音波を利用して車間距離D等を検出するものであってもよい。
【0020】また、車両には、例えばプロペラシャフト4に取り付けられて、当該プロペラシャフト4の回転速度に基づいて自車速Vspを検出する車速センサ13や、エンジン2の出力軸に取り付けられてエンジン回転数Neを検出するエンジン回転数センサ14、自動変速機3に取り付けられて変速ギア比Rat及びトルコントルク比Rtを検出する変速機状態検出センサ15、自車両のヨーレートγを検出するヨーレートセンサ16が備えられている。
【0021】また、この車両には、自車両の現在位置をGPSにより検出し、予め記憶されている地図情報に基づいて、自車両の周辺情報を検索するナビゲーションシステム17と、路側に設置されている機器から送信される外部情報に基づいて、渋滞、交通事故などの出来事が発生したことを乗員に知らせる道路情報システムの車載器18と、自車両が有料道路に入るとき等に道路管理者側の電算機と交信して、車両を停止せずに通行料金を支払うことができる自動料金収受システムの車載器19とが設けられている。さらに、車両には、先行車両が存在しないときに維持すべき車速を乗員に設定させる車速指令スイッチ20、前記車速をΔVup*だけ増加させたいときに操作させるアクセラレートスイッチ21及び前記車速をΔVup*だけ減少させたいときに操作させるコーストスイッチ22とが備えられている。
【0022】そして、車間距離センサ12から出力される車間距離D、相対前後位置X、相対横位置Y、車間距離D及び相対速度ΔVと、車速センサ13から出力される自車速Vspと、エンジン回転数センサ14から出力されるエンジン回転数Neと、変速機状態検出センサ15から出力される変速ギア比Rat及びトルコントルク比Rtと、ヨーレートセンサ16から出力されるヨーレートγと、ナビゲーションシステム17から出力される自車両の周辺情報と、道路情報システムの車載器18から出力される外部情報と、自動料金収受システムの車載器19から出力されるゲート通過信号と、車速指令スイッチ20、アクセラレートスイッチ21及びコーストスイッチ22の操作情報とが追従制御用コントローラ23に入力される。この追従制御用コントローラ23は、図示しないマイクロコンピュータ等の離散化されたディジタルシステムで構成され、後述する追従制御処理を実行し、先行車両を捕捉しているときには車間距離Dを目標車間距離D*に制御する制動圧指令値Pbr及びスロットル開度指令値θtvoを、制動制御装置8及びエンジン出力制御装置10に出力する。
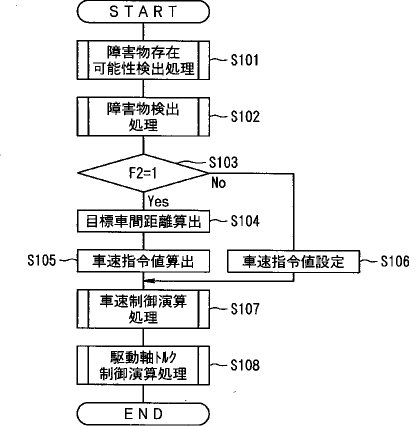
【0023】本実施の形態における追従制御処理は、所定の制御周期(例えば、10msec)毎に割り込み処理として実行される処理であって、具体的には、その処理の手順の概要を表すフローチャートである、図2に示すように、先ずそのステップS101では、ナビゲーションシステム17、道路情報システムの車載器18及び自動料金収受システムの車載器19から出力される信号に基づいて、自車両前方に障害物が存在する可能性の大きさを検出する後述する障害物存在可能性検出処理を実行し、ステップS102に移行する。
【0024】前記ステップS102では、車間距離センサ12から出力される信号に基づいて、先行車両が障害物であることを検出する後述の障害物検出処理を実行し、ステップS103に移行する。前記ステップS103では、前記障害物検出処理で設定される障害物存在フラグF2が“1”のセット状態であるか否か判定し、セット状態であるときには(Yes)ステップS104に移行し、そうでないときには(No)ステップS106に移行する。
【0025】前記ステップS104では、追従制御中の車間時間が一定になるように目標車間距離D*を算出し、ステップS105に移行する。具体的には、車速センサ13で検出された自車速Vspに基づいて、目標車間距離D*を下記(1)式に従って算出する。
D*=Th*×Vsp+Do* ………(1)
但し、Thは目標車間時間、Do*は停車時の目標車間距離。
【0026】前記ステップS105では、前記ステップS104で算出された目標車間距離D*等を用いて、車間距離センサ12で検出される実際の車間距離Dを前記目標車間距離D*に一致させるための車速指令値Vsp*を下記(2)式に従って算出し、ステップS107に移行する。
Vsp*=KL×(D−D*)+KV×ΔV+Vsp ………(2)
但し、KL、KVはフィードバックゲイン。
【0027】一方、前記ステップS106では、車速指令スイッチ20、アクセラレートスイッチ21及びコーストスイッチ22で設定された車速を車速指令値Vsp*とし、前記ステップS107に移行する。前記ステップS107では、前記ステップS105又はS106で算出等された車速指令値Vsp*に、車速センサ13で検出される自車速Vspを一致させるための制駆動トルク指令値Twrを算出する後述する車速制御演算処理を実行し、ステップS108に移行する。
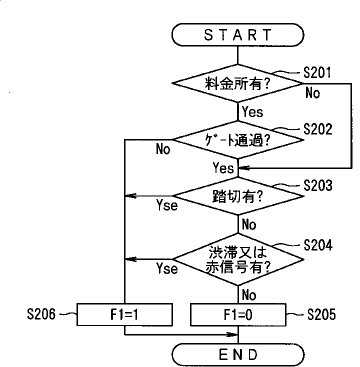
【0028】前記ステップS108では、前記ステップS107で算出される制駆動トルク指令値Twrを発生するためのスロットル開度指令値θtvo及び制動圧指令値Pbrを演算する後述する駆動軸トルク制御演算処理を実行し、この演算処理を終了する。次に、前記追従制御処理のステップS101で実行される障害物存在可能性検出処理を図3のフローチャートに基づいて詳細に説明する。まず、この処理が実行されると、ステップS201に移行するようになっており、そのステップS201では、ナビゲーションシステム17から出力される信号に基づいて、自車両近傍に自動料金収受システムのゲートがあるか否か判定し、ゲートがあるときには(Yes)ステップS202に移行し、そうでないときには(No)ステップS203に移行する。
【0029】前記ステップS202では、自動料金収受システムの車載器19から出力される信号に基づいて、自車両が自動料金収受システムのゲートを通過したか否か判定し、通過したときには(Yes)前記ステップS203に移行し、そうでなければ(No)ステップS206に移行する。前記ステップS203では、ナビゲーションシステム17から出力される信号に基づいて、自車両前方に踏切があるか否か判定し、踏切があるときには(Yes)前記ステップS206に移行し、そうでないときには(No)ステップS204に移行する。
【0030】前記ステップS204では、道路情報システムの車載器18から出力される信号に基づいて、自車両前方に渋滞又は赤信号があるか否か判定し、渋滞又は赤信号があるときには(Yes)前記ステップS206に移行し、そうでないときには(No)ステップS205に移行する。前記ステップS205では、自車両前方に停止車両が存在する可能性が高いことを示す障害物存在可能性フラグF1を“0”のリセット状態にして、この演算処理を終了する。
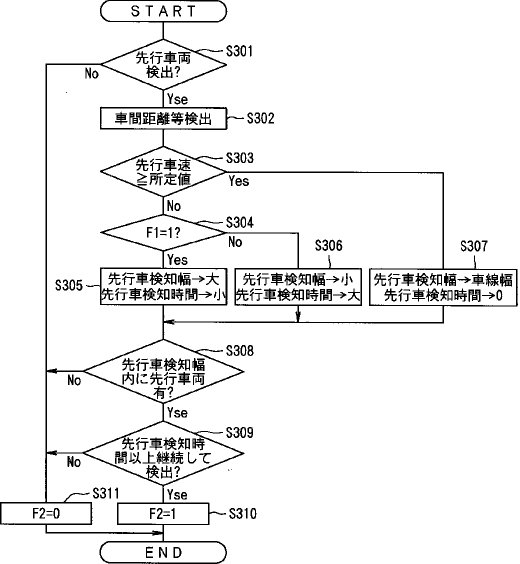
【0031】一方、前記ステップS206では、障害物存在可能性フラグF1を“1”のセット状態にして、この演算処理を終了する。次に、前記追従制御処理のステップS102で実行される障害物検出処理を図4のフローチャートに基づいて詳細に説明する。まず、この処理が実行されると、ステップS301に移行するようになっており、そのステップS301では、車間距離センサ12から出力される信号に基づいて自車両前方に先行車両を検出できたか否か判定し、先行車両を検出できたときには(Yes)ステップS302に移行し、そうでないときには(No)ステップS311に移行する。
【0032】前記ステップS302では、車速センサ13から自車速Vspを読み込み、ヨーレートセンサ16からヨーレートγを読み込み、車間距離センサ12から先行車両と自車両との間の車間距離D、相対前後位置X、相対横位置Y及び相対速度ΔVを読み込んで、ステップS303に移行する。前記ステップS303では、前記ステップS302で検出された自車速Vspに相対速度ΔVを加算して先行車両の移動速度を算出し、その移動速度が所定値以上であるか否か判定し、所定値以上であるときには(Yes)ステップS307に移行し、そうでないときには(No)ステップS304に移行する。
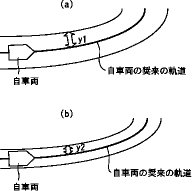
【0033】前記ステップS304では、前記障害物存在可能性検出処理で設定される障害物障害物存在可能性フラグF1が“1”のセット状態であるか否か判定し、セット状態であるときには(Yes)ステップS305に移行し、そうでないときには(No)ステップS306に移行する。前記ステップS305では、図5(a)に示すように、後述するステップS308で先行車両が障害物になるか判断するときに用いる先行車検知幅y’を走行車線幅y3より大きく設定(y1)すると共に、図6R>6(a)に示すように、後述するステップS309で用いる先行車検知時間t’を小さく設定(t1)し、ステップS308に移行する。
【0034】一方、前記ステップS306では、図5(b)に示すように、先行車検知幅y’を走行車線幅y3より小さく設定(y2)すると共に、図6(b)に示すように、後述するステップS309で用いる先行車検知時間t’を大きく設定(t2)し、前記ステップS308に移行する。また一方、前記ステップS307では、先行車検知幅y’を走行車線幅y3に設定すると共に、先行車検知時間t’を“0”に設定し、前記ステップS308に移行する。
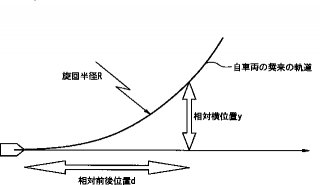
【0035】前記ステップS308では、図7に示すように、自車両の将来の軌道と自車両との相対横位置yを下記(3)式に従って算出し、その相対横位置yから前記ステップS302で検出された先行車両と自車両との相対横位置Yを減じた値が、前記ステップS305〜S307のいずれかで設定された先行車検知幅y’より小さいときに、自車両の走行車線内に先行車両があると判断し、当該先行車両が障害物になると判断してステップS309に移行し、そうでないときに(No)前記ステップS311に移行する。
【0036】y=d2/2R ………(3)
但し、dは自車両の将来の軌道と自車両との相対前後位置、自車両前方のRは自車両の旋回半径(=Vsp/γ)
前記ステップS309では、前記ステップS301で検出された先行車両が、前記ステップS305〜S307のいずれかで設定された先行車検知時間t’以上継続して検出されているか否か判定し、継続して検出されているときには(Yes)ステップS310に移行し、そうでないときには(No)前記ステップS311に移行する。
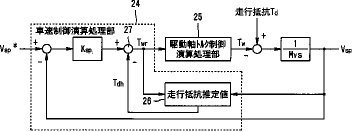
【0037】前記ステップS310では、先行車両が障害物であることを示す障害物存在フラグF2を“1”のセット状態にしてから、この演算処理を終了する。一方、前記ステップS311では、障害物存在フラグF2を“0”のリセット状態にしてから、この演算処理を終了する。次に、前記追従制御処理のステップS107で実行される車速制御演算処理の構成と前記ステップS108で実行される駆動軸トルク制御演算処理の構成とを図7にブロック図化して示す。このブロック図は、前記ステップS105で算出される車速指令値Vsp*に自車速Vspを一致させるための制駆動力トルク指令値Twrを算出する車速制御演算処理部24と、その車速制御演算処理部24で算出された制駆動力トルク指令値Twrに応じて自車両の駆動軸トルクTwを制御する駆動軸トルク制御演算処理部25と、から構成されている。
【0038】車速制御演算処理部24は、前記ステップS105で算出された車速指令値Vsp*から車速センサ13で検出される自車速Vspを減じた値に乗じられるゲインKspと、空気抵抗や転がり抵抗等の走行抵抗Tdの推定値である走行抵抗推定値Tdhを算出する走行抵抗推定部26と、前記ゲインKspが乗じられた値から走行抵抗推定値Tdhを減じて制駆動トルク指令値Twrを算出する演算器27と、から構成される。なお、走行抵抗推定部26では、演算器27で算出される制駆動トルク指令値Twrと車速センサ13で検出される自車速Vspとを用いて、下記(4)式に従って走行抵抗推定値Tdhを算出する。
【0039】
Tdh=H(s)×(MvVsp×s−Twr) ………(4)
但し、H(s)はフィルタ、Mvは車両重量、sはラプラス演算子ここで、走行抵抗推定値Tdhによって、制御系への外乱の影響が取り除かれるとすると、車速指令値Vsp*から自車速Vspまでの伝達特性は下記(5)式で表され、ゲインKspを設定することで所望の応答特性を得ることができる。
Vsp=(Ksp/Mv)/(s+Ksp/Mv)×Vsp* ………(5)
また、駆動軸トルク制御演算処理部25は、図9に示すように、前記車速制御演算処理部24で算出される制駆動力トルク指令値Twr等に基づいて、スロットル開度指令値θtvoを算出するエンジントルク指令値演算部28及びスロットル開度演算部29と、制動圧指令値Pbrを算出するエンジントルク演算部30、制駆動力補正値演算部31及び制動力演算部32と、から構成されている。
【0040】まず、エンジントルク指令値演算部28は、前記車速制御演算処理部24で算出される制駆動力トルク指令値Twrと、変速機状態検出センサ15で検出される自動変速機3の変速ギア比Rat及びトルコントルク比Rtと、エンジン回転数センサ14で検出されるエンジン回転数Neとに基づいて、下記(6)式でエンジントルク指令値Terを算出し、スロットル開度演算部29に出力する。
Ter=Je(dNe/dt)+(1/RtRatRdef)×Twr………(6)
但し、Jeはエンジンイナーシャ、Rdefはデファレンシャルギア比また、スロットル開度演算部29は、エンジントルク指令値演算部28で算出されたエンジントルク指令値Terと、エンジン回転数センサ14で検出されるエンジン回転数Neとに基づき、エンジントルクとエンジン回転数とスロットル開度との関係を示すエンジンマップを用いて、エンジントルク指令値Terに応じたエンジントルクを出力するためのスロットル開度指令値θtvoを設定する。
【0041】一方、エンジントルク演算部30は、スロットル開度演算部29で設定されたスロットル開度指令値θtvoが“0”であるときに、エンジン回転数センサ14で検出されるエンジン回転数Neに基づき、エンジントルクとエンジン回転数とスロットル開度との関係を示すエンジンマップを用いて、スロットル開度が“0”であるときのエンジントルクである最小エンジントルクTelimを設定し、制駆動力補正値演算部31に出力する。
【0042】また、制駆動力補正値演算部31では、前記エンジントルク演算部30で設定された最小エンジントルクTelimに基づいて、下記(7)式でスロットル開度が“0”のときの最小エンジントルクTelimを打ち消すための最大ブレーキトルクTwlimを算出し、制動力演算部32に出力する。
Twlim=RtRatRdefTelim ………(7)
さらに、制動力演算部32では、前記制駆動力補正値演算部31で算出された最大ブレーキトルクTwlimから、前記車速制御演算処理部24で算出される制駆動力トルク指令値Twrを減じてブレーキトルク指令値Tbrを算出すると共に、そのブレーキトルク指令値Tbrを出力するための制動圧指令値Pbrを下記(8)式で算出する。なお、スロットル開度指令値θtvoが“0”より大きいときには、制動圧指令値Pbrは“0”となる。
【0043】次に、本実施形態の動作を具体的な状況に基づいて詳細に説明する。まず、高速道路を走行中に、自車両前方を走行する先行車両に追従走行させるために所定の操作を運転者が行ったとする。すると、追従制御用コントローラ23で追従制御処理が実行されて、図2に示すように、ステップS101で障害物存在可能性検出処理が実行される。障害物存在可能性検出処理が実行されると、図3に示すように、ステップS201〜S204の判定が「No」となり、ステップS205で、障害物存在可能性フラグF1が障害物の存在する可能性が小さいことを示す“0”のリセット状態にされて追従制御処理に復帰し、次いでステップS102で障害物検出処理が実行される。
【0044】障害物検出処理が実行されると、図4に示すように、ステップS301の判定が「Yes」となり、ステップS302で、車速センサ13から自車速Vspが読み込まれ、ヨーレートセンサ16からヨーレートγが読み込まれ、車間距離センサ12から先行車両と自車両との間の車間距離D、相対前後位置X、相対横位置Y及び相対速度ΔVが読み込まれ、ステップS303の判定が「Yes」となり、ステップS307で、先行車検知幅y’が走行車線幅y3に設定されると共に、先行車検知時間t’が“0”に設定され、図7に示すように、自車両の将来の軌道から先行車検知幅y’の範囲内には先行車両が存在しないとすると、ステップS308の判定が「No」となり、ステップS311で、障害物存在フラグF2が障害物が存在しないことを示す“0”のリセット状態にされて、この演算処理が終了される。
【0045】障害物検出処理が終了されると、追従制御処理に復帰して、そのステップS103の判定が「Yes」となり、ステップS106で、車速指令スイッチ20、アクセラレートスイッチ21及びコーストスイッチ22で設定された車速が車速指令値Vsp*とされ、前記ステップS107で車速制御演算処理が実行され、前記ステップS106で算出された車速指令値Vsp*に自車速Vspを一致させるための制駆動トルク指令値Twrを算出する車速制御演算処理が実行され、ステップS108で駆動軸トルク制御演算処理が実行されて、前記ステップS107で算出された制駆動トルク指令値Twrを発生するためのスロットル開度指令値θtvoが演算される。
【0046】そして、追従制御用コントローラ23で算出されたスロットル開度指令値θtvoに応じて、エンジン出力制御装置10でスロットルアクチュエータが制御され、乗員によって設定された車速指令値Vsp*に自車速Vspが制御される。また、上記フローが繰り返し実行されているうちに、自車両が高速道路出口の料金所に近づき、低速走行している先行車両に近づいたとする。すると、障害物存在可能性検出処理で、図3に示すように、ステップS201の判定が「Yes」となり、また自動料金収受システムのゲートを通過していないので、ステップS202の判定が「No」となり、ステップS206で障害物存在可能性フラグF1が障害物の存在する可能性が大きいことを示す“1”のセット状態にされて追従制御処理に復帰し、ステップS102で障害物検出処理が実行される。
【0047】障害物検出処理が実行されると、図4に示すように、ステップS301の判定が「Yes」となり、ステップS302を経て、ステップS303の判定が「No」となり、またステップS304の判定が「Yes」となり、ステップS305で、図5(a)に示すように、先行車検知幅y’が走行車線幅y3より大きく設定(y1)されて、自車両の将来の軌道と先行車検知幅y’とから定まる範囲内に先行車両が存在するようになると共に、図6(a)に示すように、先行車検知時間t’が小さく設定(t1)されて、前記ステップS301で検出された先行車両が継続して検出された時間が前記ステップS305で設定された先行車検知時間t’より大きくなり、ステップS308及びS309の判定が「Yes」となり、ステップS310で障害物存在フラグF2が障害物が存在することを示す“1”のセット状態にされて、この演算処理が終了される。
【0048】障害物検出処理が終了されると、追従制御処理に復帰して、図2に示すように、そのステップS103の判定が「Yes」となり、ステップS104〜S108が実行されて、自車両と先行車両との間の車間距離Dが目標車間距離D*になるように自車速Vspが制御される。このように、本実施形態では、自車両前方に障害物が存在する可能性が大きいと判断されたときに、前記先行車検知幅yを大きく設定すると共に前記先行車検知時間tを小さく設定するため、前記可能性が大きいときには障害物の検出タイミングが早まる。
【0049】また、上記フローが繰り返し実行されているうちに、自車両が高速道路出口の料金所に設置されている自動料金収受システムのゲートを通過したとする。すると、障害物存在可能性検出処理で、図3に示すように、ステップS201を経て、ステップS202の判定が「Yes」となり、ステップS203及びS204を経て、ステップS205で障害物存在可能性フラグF1が 再び“0”のリセット状態にされて、追従制御処理に復帰し、次いでステップS102で障害物検出処理が実行される。
【0050】障害物検出処理が実行されると、図4に示すように、ステップS301の判定が「Yes」となり、ステップS302を経て、先行車両が低速走行していたとすると、ステップS303の判定が「No」となり、またステップS304の判定が「No」となり、ステップS306で、図5(b)に示すように、先行車検知幅y’が走行車線幅y3より小さく設定(y1)されて、図7に示すように、自車両の将来の軌道から先行車検知幅y’の範囲内には先行車両が存在しないとすると、ステップS308の判定が「No」となり、ステップS311で、障害物存在フラグF2が障害物が存在しないことを示す“0”のリセット状態にされて、この演算処理が終了される。
【0051】このように、本実施形態では、自車両前方に障害物が存在する可能性が小さいと判断されたときに、前記先行車検知幅yを小さく設定すると共に前記先行車検知時間tを大きく設定するため、前記可能性が小さいときには障害物の誤検出が抑制される。また、本実施形態にあっては、ナビゲーションシステム17によって、自車両近傍に自動料金収受システムがあることが検出されてから、当該自動料金収受システムの車載器19によってゲートを通過したことが検出されるまでは、自車両前方に障害物が存在する可能性が大きいと判断するため、障害物が存在する可能性の大きさを容易に検出することができる。さらに、自動料金収受システムのゲートを通過したことを検出する手段として、自動料金収受システムの車載器19を用いているため、当該ゲートを通過したことが精度良く検出される。
【0052】また、上記フローが繰り返し実行されているうちに、自車両が高速道路を降りて一般道を走行中に踏切に近づき、踏切前で一旦停止している先行車両に近づいたとする。すると、障害物存在可能性検出処理で、図3に示すように、ステップS201の判定が「No」となり、ステップS203の判定が「Yes」となり、ステップS206で障害物存在可能性フラグF1が“1”のセット状態にされて、この演算処理が終了される。
【0053】このように、本実施形態では、ナビゲーションシステム17からの情報に基づいて、自車両前方に踏切があることが検出されたときに、自車両前方に障害物が存在する可能性が大きいと判断するため、障害物が存在する可能性の大きさを容易に検出することができる。また、上記フローが繰り返し実行されているうちに、自車両が踏切を通過して渋滞に近づき、その渋滞で停止している先行車両に近づいたとする。すると、障害物存在可能性検出処理で、図3に示すように、ステップS201及びS203の判定が「No」となり、ステップS204の判定が「Yes」となり、ステップS206で障害物存在可能性フラグF1が“1”のリセット状態にされて、この演算処理が終了される。
【0054】このように、本実施形態では路側に設置されている機器から送信される外部情報に基づいて、自車両前方に渋滞があることが検出されたときに、自車両前方に障害物が存在する可能性が大きいと判断するため、障害物が存在する可能性の大きさを容易に検出することができる。なお、上記実施形態では、ナビゲーションシステム17、道路情報システムの車載器18及び自動料金システムの車載器19は走行環境検出手段に対応し、障害物存在可能性検出手段に対応し、ステップS101、S201〜S206は障害物存在可能性検出手段に対応し、車間距離センサ12は物体検出手段に対応し、障害物検出手段はステップS102、S303〜S311に対応する。
【0055】また、上記実施の形態は本発明の障害物存在可能性検出装置及び障害物検出装置の一例を示したものであり、装置の構成等を限定するものではない。例えば、ナビゲーションシステム17で自車両前方に踏切が検出されたときに、自車両前方に障害物が存在する可能性が大きいと判断する例を示したが、踏切に限るものではなく、例えば一旦停止、分岐、合流及び料金所の少なくとも一つがあることが検出されたときに、自車両前方に障害物が存在する可能性が大きいと判断するようにしてもよい。
【0056】また、道路情報システムの車載器18で自車両前方に渋滞又は赤信号が検出されたときに、自車両前方に障害物が存在する可能性が大きいと判断する例を示したが、例えば工事、事故、路上落下物等が検出されたときに、自車両前方に障害物が存在する可能性が大きいと判断するようにしてもよい。
【図面の簡単な説明】
【図1】本発明の一実施形態を示す概略構成図である。
【図2】図1の追従制御用コントローラ内で実行される追従制御処理を示すフローチャートである。
【図3】図1の追従制御用コントローラ内で実行される障害物存在可能性検出処理を示すフローチャートである。
【図4】図1の追従制御用コントローラ内で実行される障害物検出処理を示すフローチャートである。
【図5】図4の演算処理に用いられる先行車検知幅を説明するための説明図である。
【図6】図4の演算処理に用いられる先行車検知時間を説明するためのグラフである。
【図7】相対前後位置、相対横位置及び旋回半径の関係を説明するための説明図である。
【図8】図1の追従制御用コントローラ内で実行される車速制御演算処理及び駆動軸トルク制御演算処理の構成を示すブロック図である。
【図9】図1の追従制御用コントローラ内で実行される駆動軸トルク制御演算処理の構成を示すブロック図である。
【符号の説明】
1FL、1FRは前輪
1RL、1RRは後輪
2はエンジン
3は自動変速機
4はプロペラシャフト
5は最終減速装置
6は車軸
7はディスクブレーキ
8は制動制御装置
10はエンジン出力制御装置
12は車間距離センサ
13は車速センサ
14はエンジン回転数センサ
15は変速機状態検出センサ
16はヨーレートセンサ
17はナビゲーションシステム
18は道路情報システムの車載器
19は自動料金収受システムの車載器
23は追従制御用コントローラ
【0001】
【発明の属する技術分野】この発明は、自車両前方に、自車両の走行を妨げる低速走行車両や停止車両といった障害物が存在する可能性の大きさを検出する障害物存在可能性検出装置及びそれを用いた障害物検出装置に関する。
【0002】
【従来の技術】従来、自車両前方の障害物を検出する装置としては、特開平9−263159号公報に記載されている「車両の速度制御装置」が知られている。この従来例には、自車両の走行車線上に停止している物体に比べて、路肩に停止している物体はレーザレーダ等の車間距離検出センサの走査範囲から直ぐに外れてしまうという特性を利用して、車間距離検出センサで停止物体を継続して検出できた時間が閾値以下の場合は当該停止物体は路肩にあると判断し、また前記閾値以上の場合は当該停止物体は自車両の走行車線上にあると判断して障害物を検出すると共に、その障害物を回避するために制御によってブレーキを作動する技術が開示されている。
【0003】
【発明が解決しようとする課題】しかしながら、上記従来例にあっては、停止物体が走行車線上にあると判断するための閾値を大きくすると、路肩にある停止物体を走行車線上にある障害物であると誤検出する可能性は小さくなるものの、停止物体が障害物であることを検出するまでの時間は大きくなってしまい、制御によりブレーキを作動するタイミングが遅くなって、乗員に違和感を与えてしまう恐れがあった。
【0004】また、前記閾値を小さくすると、停止物体が障害物であることを検出するまでの時間は小さくなるものの、障害物を誤検出する可能性は大きくなってしまい、障害物が存在しないときにも制御によりブレーキが作動して、乗員に違和感を与えてしまう恐れがあった。そこで、本発明は上記従来の技術の未解決の問題点に着目してなされたものであって、障害物の誤検出を防止すると共に障害物の検出タイミングを早めることができる障害物存在可能性検出装置及びそれを用いた障害物検出装置を提供することを課題とする。
【0005】
【課題を解決するための手段】上記課題を解決するために、請求項1に係る発明である障害物存在可能性検出装置は、自車両の走行環境を検出する走行環境検出手段と、前記走行環境検出手段で検出された走行環境に基づいて、自車両前方に障害物が存在する可能性の大きさを検出する障害物存在可能性検出手段と、を備えたことを特徴とする。また、請求項2に係る発明は、請求項1に記載の発明である障害物存在可能性検出装置において、前記走行環境検出手段は、自車位置情報と地図情報とに基づいて、自車両前方に、踏切、一旦停止、分岐、合流及び料金所の少なくとも一つがあることを検出し、前記障害物存在可能性検出手段は、前記走行環境検出手段で踏切、一旦停止、分岐、合流及び料金所の少なくとも一つがあることが検出されたときに、自車両前方に障害物が存在する可能性が大きいと判断することを特徴とする。
【0006】さらに、請求項3に係る発明は、請求項1又は請求項2に記載の発明である障害物存在可能性検出装置において、前記走行環境検出手段は、自車両近傍に自動料金収受システムのゲートがあることを検出するゲート存在検出手段と、自車両が自動料金収受システムのゲートを通過したことを検出するゲート通過検出手段と、を有し、前記障害物存在可能性検出手段は、前記ゲート存在検出手段で自動料金収受システムがあることが検出されてから、前記ゲート通過手段で当該自動料金収受システムのゲートを通過したことが検出されるまでは、自車両前方に障害物が存在する可能性が大きいと判断し、前記ゲート通過手段で当該ゲートを通過したことが検出されてからは前記可能性が小さいと判断することを特徴とする。
【0007】また、請求項4に係る発明は、請求項1乃至請求項3のいずれかに記載の発明である障害物存在可能性検出装置において、前記走行環境検出手段は、外部からの情報に基づいて、自車両前方の渋滞、赤信号、工事、事故及び路上落下物の少なくとも一つを検出し、前記障害物存在可能性検出手段は、前記走行環境検出手段で渋滞及び赤信号の少なくとも一つが検出されたときに、自車両前方に障害物が存在する可能性が大きいと判断することを特徴とする。
【0008】一方、請求項5に係る発明である障害物検出装置は、前記請求項1乃至請求項4のいずれかの障害物存在可能性検出装置と、自車両前方に存在する物体を検出する物体検出手段と、前記物体検出手段で検出された物体が障害物であることを検出する障害物検出手段と、を備え、前記障害物検出手段は、前記障害物存在可能性検出装置で判断される前記可能性の大きさに応じて、前記物体検出手段で検出された物体が障害物であることを検出する方法を変更することを特徴とする。
【0009】また、請求項6に係る発明は、請求項5に記載の発明である障害物存在可能性検出装置において、前記障害物検出手段は、前記物体検出手段で検出された物体のうち移動速度が所定値より小さいものを検出する障害物候補検出手段と、自車両の将来の軌道を推定する軌道推定手段と、前記障害物候補検出手段で検出された物体が前記軌道推定手段で推定された軌道から所定範囲内にあるときに当該物体が障害物であると判断する障害物判断手段と、を有し、前記障害物判断手段は、前記障害物存在可能性検出装置で自車両前方に障害物が存在する可能性が大きいと判断されたときに前記所定範囲を大きく設定し、自車両前方に障害物が存在する可能性が小さいと判断されたときに前記所定範囲を小さく設定することを特徴とする。
【0010】さらに、請求項7に係る発明は、請求項5又は請求項6に記載の発明である障害物存在可能性検出装置において、前記障害物判断手段は、前記物体検出手段で検出された物体のうち移動速度が所定値より小さいものを検出する障害物候補検出手段と、前記障害物候補検出手段で所定時間以上継続して検出されている物体があるときに当該物体が障害物であると判断する障害物判断手段と、を有し、前記障害物判断手段は、前記障害物存在可能性検出装置で自車両前方に障害物が存在する可能性が大きいと判断されたときに前記所定時間を小さく設定し、自車両前方に障害物が存在する可能性が小さいと判断されたときに前記所定時間を大きく設定することを特徴とする。
【0011】
【発明の効果】したがって、請求項1に係る発明である障害物存在可能性検出装置にあっては、自車両の走行環境を検出し、その走行環境に基づいて、自車両前方に障害物が存在する可能性の大きさを検出するため、例えば停止物体を継続して検出できた時間が閾値以上である場合に当該停止物体を走行車線上の障害物であると判断する障害物検出装置に適用すれば、渋滞等で障害物が存在する可能性が大きいときには前記閾値を小さくして障害物の検出タイミングを早めることができ、前記可能性が小さいときには前記閾値を大きくして障害物の誤検出を抑制することができる。
【0012】また、請求項2に係る発明である障害物存在可能性検出装置にあっては、自車位置情報と地図情報とに基づいて、自車両前方に、踏切、一旦停止、分岐、合流及び料金所の少なくとも一つがあることが検出されたときに、自車両前方に障害物が存在する可能性が大きいと判断するため、障害物が存在する可能性の大きさを地図情報や外部情報等に基づいて容易に検出することができる。さらに、請求項3に係る発明である障害物存在可能性検出装置にあっては、例えばナビゲーションシステム等によって、自車両近傍に自動料金収受システムがあることが検出されてから、当該自動料金収受システムの車載器等によってゲートを通過したことが検出されるまでは、自車両前方に障害物が存在する可能性が大きいと判断し、当該ゲートを通過したことが検出されてからは前記可能性が小さいと判断するため、障害物が存在する可能性の大きさを容易に検出することができる。また、自動料金収受システムのゲートを通過したことを検出する手段として、例えば自動料金収受システムの車載器を用いれば、当該ゲートを通過したことを精度良く検出することができる。
【0013】また、請求項4に係る発明である障害物存在可能性検出装置にあっては、例えば路側に設置されているVICS(Vehicle Information and Communication System)等から送信される外部情報に基づいて、自車両前方に渋滞、赤信号、工事、事故及び路上落下物の少なくとも一つがあることが検出されたときに、自車両前方に障害物が存在する可能性が大きいと判断するため、障害物が存在する可能性の大きさを外部情報等に基づいて容易に検出することができる。
【0014】一方、請求項5に係る発明である障害物検出装置にあっては、自車両前方に存在する物体を検出し、その物体が障害物であることを検出すると共に、前記請求項1乃至請求項4のいずれかの障害物存在可能性検出装置で判断される前記可能性の大きさに応じて、前記物体が障害物であることを検出する方法を変更するため、例えば停止物体を継続して検出できた時間が閾値以上であるときに当該停止物体を障害物であると判断するようにし、且つ、渋滞等で障害物が存在する可能性が大きいときには前記閾値を小さくして障害物の検出タイミングを早めることができ、前記可能性が小さいときには前記閾値を大きくして障害物の誤検出を抑制することができる。
【0015】また、請求項6に係る発明である障害物検出装置にあっては、自車両前方に存在する物体のうち移動速度が所定値より小さいものが、自車両の将来の軌道から所定範囲内にあるときに当該物体が障害物であると判断すると共に、自車両前方に障害物が存在する可能性が大きいと判断されたときに前記所定範囲を大きく設定し、自車両前方に障害物が存在する可能性が小さいと判断されたときに前記所定範囲を小さく設定するため、例えば渋滞等で障害物が存在する可能性が大きいときには前記所定範囲を大きくして障害物の検出タイミングを早めることができ、前記可能性が小さいときには前記所定範囲を小さくして障害物の誤検出を抑制することができる。
【0016】さらに、請求項7に係る発明である障害物検出装置にあっては、自車両前方に存在する物体のうち移動速度が所定値より小さいものを検出し、それらのうちに所定時間以上継続して検出されている物体があるときに当該物体が障害物であると判断すると共に、自車両前方に障害物が存在する可能性が大きいと判断されたときに前記所定時間を小さく設定し、自車両前方に障害物が存在する可能性が小さいと判断されたときに前記所定時間を大きく設定するため、例えば渋滞等で障害物が存在する可能性が大きいときには前記所定時間を小さくして障害物の検出タイミングを早めることができ、前記可能性が小さいときには前記所定時間を大きくして障害物の誤検出を抑制することができる。
【0017】
【発明の実施の形態】図1は、本発明の第1の実施形態を示す概略構成図であって、図中、1FL、1FRは従動輪としての前輪、1RL、1RRは駆動輪としての後輪であって、後輪1RL、1RRは、エンジン2の駆動力が自動変速機3、プロペラシャフト4、最終減速装置5及び車軸6を介して伝達されて回転駆動される。前輪1FL、1FR及び後輪1RL、1RRには、夫々制動力を発生するブレーキアクチュエータとしてのディスクブレーキ7が設けられていると共に、これらディスクブレーキ7の制動油圧が制動制御装置8によって制御される。
【0018】ここで、制動制御装置8は、ブレーキペダルストロークセンサ9が検出したブレーキペダルの踏込量に応じて制動油圧を発生すると共に、後述する追従制御用コントローラ23からの制動圧指令値Pbrに応じて制動油圧を発生するように構成されている。また、エンジン2には、その出力を制御するエンジン出力制御装置10が設けられている。このエンジン出力制御装置10は、アクセルペダルストロークセンサ11が検出したアクセルペダルの踏込量及び後述する追従制御用コントローラ23からのスロットル開度指令値θtvoに応じて、エンジン2に設けられたスロットル開度を調整するスロットルアクチュエータを制御するように構成される。
【0019】一方、車両の前方側の車体下部には、レーザ光を掃射して先行車両からの反射光を受光するレーダ方式の構成を有する車間距離センサ12が設けられている。車間距離センサ12では、レーザ光を掃射してから先行車両の反射光を受光するまでの時間を計測して、自車両と先行車両との間の相対前後位置X、相対横位置Y及び車間距離Dを検出すると共に、その車間距離Dの検出値を微分して自車両と先行車両との相対速度△Vを算出し、それらを追従制御用コントローラ23に出力するようになっている。なお、車間距離Dから相対速度△Vを算出する方法としては、車間距離Dの検出値を微分するやり方に変えて、例えば、バンドバスフィルターを用いるようにしてもよい。また、車間距離センサ12は、車間距離Dを検出できるものであればよく、レーザ光に変えて、電波や超音波を利用して車間距離D等を検出するものであってもよい。
【0020】また、車両には、例えばプロペラシャフト4に取り付けられて、当該プロペラシャフト4の回転速度に基づいて自車速Vspを検出する車速センサ13や、エンジン2の出力軸に取り付けられてエンジン回転数Neを検出するエンジン回転数センサ14、自動変速機3に取り付けられて変速ギア比Rat及びトルコントルク比Rtを検出する変速機状態検出センサ15、自車両のヨーレートγを検出するヨーレートセンサ16が備えられている。
【0021】また、この車両には、自車両の現在位置をGPSにより検出し、予め記憶されている地図情報に基づいて、自車両の周辺情報を検索するナビゲーションシステム17と、路側に設置されている機器から送信される外部情報に基づいて、渋滞、交通事故などの出来事が発生したことを乗員に知らせる道路情報システムの車載器18と、自車両が有料道路に入るとき等に道路管理者側の電算機と交信して、車両を停止せずに通行料金を支払うことができる自動料金収受システムの車載器19とが設けられている。さらに、車両には、先行車両が存在しないときに維持すべき車速を乗員に設定させる車速指令スイッチ20、前記車速をΔVup*だけ増加させたいときに操作させるアクセラレートスイッチ21及び前記車速をΔVup*だけ減少させたいときに操作させるコーストスイッチ22とが備えられている。
【0022】そして、車間距離センサ12から出力される車間距離D、相対前後位置X、相対横位置Y、車間距離D及び相対速度ΔVと、車速センサ13から出力される自車速Vspと、エンジン回転数センサ14から出力されるエンジン回転数Neと、変速機状態検出センサ15から出力される変速ギア比Rat及びトルコントルク比Rtと、ヨーレートセンサ16から出力されるヨーレートγと、ナビゲーションシステム17から出力される自車両の周辺情報と、道路情報システムの車載器18から出力される外部情報と、自動料金収受システムの車載器19から出力されるゲート通過信号と、車速指令スイッチ20、アクセラレートスイッチ21及びコーストスイッチ22の操作情報とが追従制御用コントローラ23に入力される。この追従制御用コントローラ23は、図示しないマイクロコンピュータ等の離散化されたディジタルシステムで構成され、後述する追従制御処理を実行し、先行車両を捕捉しているときには車間距離Dを目標車間距離D*に制御する制動圧指令値Pbr及びスロットル開度指令値θtvoを、制動制御装置8及びエンジン出力制御装置10に出力する。
【0023】本実施の形態における追従制御処理は、所定の制御周期(例えば、10msec)毎に割り込み処理として実行される処理であって、具体的には、その処理の手順の概要を表すフローチャートである、図2に示すように、先ずそのステップS101では、ナビゲーションシステム17、道路情報システムの車載器18及び自動料金収受システムの車載器19から出力される信号に基づいて、自車両前方に障害物が存在する可能性の大きさを検出する後述する障害物存在可能性検出処理を実行し、ステップS102に移行する。
【0024】前記ステップS102では、車間距離センサ12から出力される信号に基づいて、先行車両が障害物であることを検出する後述の障害物検出処理を実行し、ステップS103に移行する。前記ステップS103では、前記障害物検出処理で設定される障害物存在フラグF2が“1”のセット状態であるか否か判定し、セット状態であるときには(Yes)ステップS104に移行し、そうでないときには(No)ステップS106に移行する。
【0025】前記ステップS104では、追従制御中の車間時間が一定になるように目標車間距離D*を算出し、ステップS105に移行する。具体的には、車速センサ13で検出された自車速Vspに基づいて、目標車間距離D*を下記(1)式に従って算出する。
D*=Th*×Vsp+Do* ………(1)
但し、Thは目標車間時間、Do*は停車時の目標車間距離。
【0026】前記ステップS105では、前記ステップS104で算出された目標車間距離D*等を用いて、車間距離センサ12で検出される実際の車間距離Dを前記目標車間距離D*に一致させるための車速指令値Vsp*を下記(2)式に従って算出し、ステップS107に移行する。
Vsp*=KL×(D−D*)+KV×ΔV+Vsp ………(2)
但し、KL、KVはフィードバックゲイン。
【0027】一方、前記ステップS106では、車速指令スイッチ20、アクセラレートスイッチ21及びコーストスイッチ22で設定された車速を車速指令値Vsp*とし、前記ステップS107に移行する。前記ステップS107では、前記ステップS105又はS106で算出等された車速指令値Vsp*に、車速センサ13で検出される自車速Vspを一致させるための制駆動トルク指令値Twrを算出する後述する車速制御演算処理を実行し、ステップS108に移行する。
【0028】前記ステップS108では、前記ステップS107で算出される制駆動トルク指令値Twrを発生するためのスロットル開度指令値θtvo及び制動圧指令値Pbrを演算する後述する駆動軸トルク制御演算処理を実行し、この演算処理を終了する。次に、前記追従制御処理のステップS101で実行される障害物存在可能性検出処理を図3のフローチャートに基づいて詳細に説明する。まず、この処理が実行されると、ステップS201に移行するようになっており、そのステップS201では、ナビゲーションシステム17から出力される信号に基づいて、自車両近傍に自動料金収受システムのゲートがあるか否か判定し、ゲートがあるときには(Yes)ステップS202に移行し、そうでないときには(No)ステップS203に移行する。
【0029】前記ステップS202では、自動料金収受システムの車載器19から出力される信号に基づいて、自車両が自動料金収受システムのゲートを通過したか否か判定し、通過したときには(Yes)前記ステップS203に移行し、そうでなければ(No)ステップS206に移行する。前記ステップS203では、ナビゲーションシステム17から出力される信号に基づいて、自車両前方に踏切があるか否か判定し、踏切があるときには(Yes)前記ステップS206に移行し、そうでないときには(No)ステップS204に移行する。
【0030】前記ステップS204では、道路情報システムの車載器18から出力される信号に基づいて、自車両前方に渋滞又は赤信号があるか否か判定し、渋滞又は赤信号があるときには(Yes)前記ステップS206に移行し、そうでないときには(No)ステップS205に移行する。前記ステップS205では、自車両前方に停止車両が存在する可能性が高いことを示す障害物存在可能性フラグF1を“0”のリセット状態にして、この演算処理を終了する。
【0031】一方、前記ステップS206では、障害物存在可能性フラグF1を“1”のセット状態にして、この演算処理を終了する。次に、前記追従制御処理のステップS102で実行される障害物検出処理を図4のフローチャートに基づいて詳細に説明する。まず、この処理が実行されると、ステップS301に移行するようになっており、そのステップS301では、車間距離センサ12から出力される信号に基づいて自車両前方に先行車両を検出できたか否か判定し、先行車両を検出できたときには(Yes)ステップS302に移行し、そうでないときには(No)ステップS311に移行する。
【0032】前記ステップS302では、車速センサ13から自車速Vspを読み込み、ヨーレートセンサ16からヨーレートγを読み込み、車間距離センサ12から先行車両と自車両との間の車間距離D、相対前後位置X、相対横位置Y及び相対速度ΔVを読み込んで、ステップS303に移行する。前記ステップS303では、前記ステップS302で検出された自車速Vspに相対速度ΔVを加算して先行車両の移動速度を算出し、その移動速度が所定値以上であるか否か判定し、所定値以上であるときには(Yes)ステップS307に移行し、そうでないときには(No)ステップS304に移行する。
【0033】前記ステップS304では、前記障害物存在可能性検出処理で設定される障害物障害物存在可能性フラグF1が“1”のセット状態であるか否か判定し、セット状態であるときには(Yes)ステップS305に移行し、そうでないときには(No)ステップS306に移行する。前記ステップS305では、図5(a)に示すように、後述するステップS308で先行車両が障害物になるか判断するときに用いる先行車検知幅y’を走行車線幅y3より大きく設定(y1)すると共に、図6R>6(a)に示すように、後述するステップS309で用いる先行車検知時間t’を小さく設定(t1)し、ステップS308に移行する。
【0034】一方、前記ステップS306では、図5(b)に示すように、先行車検知幅y’を走行車線幅y3より小さく設定(y2)すると共に、図6(b)に示すように、後述するステップS309で用いる先行車検知時間t’を大きく設定(t2)し、前記ステップS308に移行する。また一方、前記ステップS307では、先行車検知幅y’を走行車線幅y3に設定すると共に、先行車検知時間t’を“0”に設定し、前記ステップS308に移行する。
【0035】前記ステップS308では、図7に示すように、自車両の将来の軌道と自車両との相対横位置yを下記(3)式に従って算出し、その相対横位置yから前記ステップS302で検出された先行車両と自車両との相対横位置Yを減じた値が、前記ステップS305〜S307のいずれかで設定された先行車検知幅y’より小さいときに、自車両の走行車線内に先行車両があると判断し、当該先行車両が障害物になると判断してステップS309に移行し、そうでないときに(No)前記ステップS311に移行する。
【0036】y=d2/2R ………(3)
但し、dは自車両の将来の軌道と自車両との相対前後位置、自車両前方のRは自車両の旋回半径(=Vsp/γ)
前記ステップS309では、前記ステップS301で検出された先行車両が、前記ステップS305〜S307のいずれかで設定された先行車検知時間t’以上継続して検出されているか否か判定し、継続して検出されているときには(Yes)ステップS310に移行し、そうでないときには(No)前記ステップS311に移行する。
【0037】前記ステップS310では、先行車両が障害物であることを示す障害物存在フラグF2を“1”のセット状態にしてから、この演算処理を終了する。一方、前記ステップS311では、障害物存在フラグF2を“0”のリセット状態にしてから、この演算処理を終了する。次に、前記追従制御処理のステップS107で実行される車速制御演算処理の構成と前記ステップS108で実行される駆動軸トルク制御演算処理の構成とを図7にブロック図化して示す。このブロック図は、前記ステップS105で算出される車速指令値Vsp*に自車速Vspを一致させるための制駆動力トルク指令値Twrを算出する車速制御演算処理部24と、その車速制御演算処理部24で算出された制駆動力トルク指令値Twrに応じて自車両の駆動軸トルクTwを制御する駆動軸トルク制御演算処理部25と、から構成されている。
【0038】車速制御演算処理部24は、前記ステップS105で算出された車速指令値Vsp*から車速センサ13で検出される自車速Vspを減じた値に乗じられるゲインKspと、空気抵抗や転がり抵抗等の走行抵抗Tdの推定値である走行抵抗推定値Tdhを算出する走行抵抗推定部26と、前記ゲインKspが乗じられた値から走行抵抗推定値Tdhを減じて制駆動トルク指令値Twrを算出する演算器27と、から構成される。なお、走行抵抗推定部26では、演算器27で算出される制駆動トルク指令値Twrと車速センサ13で検出される自車速Vspとを用いて、下記(4)式に従って走行抵抗推定値Tdhを算出する。
【0039】
Tdh=H(s)×(MvVsp×s−Twr) ………(4)
但し、H(s)はフィルタ、Mvは車両重量、sはラプラス演算子ここで、走行抵抗推定値Tdhによって、制御系への外乱の影響が取り除かれるとすると、車速指令値Vsp*から自車速Vspまでの伝達特性は下記(5)式で表され、ゲインKspを設定することで所望の応答特性を得ることができる。
Vsp=(Ksp/Mv)/(s+Ksp/Mv)×Vsp* ………(5)
また、駆動軸トルク制御演算処理部25は、図9に示すように、前記車速制御演算処理部24で算出される制駆動力トルク指令値Twr等に基づいて、スロットル開度指令値θtvoを算出するエンジントルク指令値演算部28及びスロットル開度演算部29と、制動圧指令値Pbrを算出するエンジントルク演算部30、制駆動力補正値演算部31及び制動力演算部32と、から構成されている。
【0040】まず、エンジントルク指令値演算部28は、前記車速制御演算処理部24で算出される制駆動力トルク指令値Twrと、変速機状態検出センサ15で検出される自動変速機3の変速ギア比Rat及びトルコントルク比Rtと、エンジン回転数センサ14で検出されるエンジン回転数Neとに基づいて、下記(6)式でエンジントルク指令値Terを算出し、スロットル開度演算部29に出力する。
Ter=Je(dNe/dt)+(1/RtRatRdef)×Twr………(6)
但し、Jeはエンジンイナーシャ、Rdefはデファレンシャルギア比また、スロットル開度演算部29は、エンジントルク指令値演算部28で算出されたエンジントルク指令値Terと、エンジン回転数センサ14で検出されるエンジン回転数Neとに基づき、エンジントルクとエンジン回転数とスロットル開度との関係を示すエンジンマップを用いて、エンジントルク指令値Terに応じたエンジントルクを出力するためのスロットル開度指令値θtvoを設定する。
【0041】一方、エンジントルク演算部30は、スロットル開度演算部29で設定されたスロットル開度指令値θtvoが“0”であるときに、エンジン回転数センサ14で検出されるエンジン回転数Neに基づき、エンジントルクとエンジン回転数とスロットル開度との関係を示すエンジンマップを用いて、スロットル開度が“0”であるときのエンジントルクである最小エンジントルクTelimを設定し、制駆動力補正値演算部31に出力する。
【0042】また、制駆動力補正値演算部31では、前記エンジントルク演算部30で設定された最小エンジントルクTelimに基づいて、下記(7)式でスロットル開度が“0”のときの最小エンジントルクTelimを打ち消すための最大ブレーキトルクTwlimを算出し、制動力演算部32に出力する。
Twlim=RtRatRdefTelim ………(7)
さらに、制動力演算部32では、前記制駆動力補正値演算部31で算出された最大ブレーキトルクTwlimから、前記車速制御演算処理部24で算出される制駆動力トルク指令値Twrを減じてブレーキトルク指令値Tbrを算出すると共に、そのブレーキトルク指令値Tbrを出力するための制動圧指令値Pbrを下記(8)式で算出する。なお、スロットル開度指令値θtvoが“0”より大きいときには、制動圧指令値Pbrは“0”となる。
【0043】次に、本実施形態の動作を具体的な状況に基づいて詳細に説明する。まず、高速道路を走行中に、自車両前方を走行する先行車両に追従走行させるために所定の操作を運転者が行ったとする。すると、追従制御用コントローラ23で追従制御処理が実行されて、図2に示すように、ステップS101で障害物存在可能性検出処理が実行される。障害物存在可能性検出処理が実行されると、図3に示すように、ステップS201〜S204の判定が「No」となり、ステップS205で、障害物存在可能性フラグF1が障害物の存在する可能性が小さいことを示す“0”のリセット状態にされて追従制御処理に復帰し、次いでステップS102で障害物検出処理が実行される。
【0044】障害物検出処理が実行されると、図4に示すように、ステップS301の判定が「Yes」となり、ステップS302で、車速センサ13から自車速Vspが読み込まれ、ヨーレートセンサ16からヨーレートγが読み込まれ、車間距離センサ12から先行車両と自車両との間の車間距離D、相対前後位置X、相対横位置Y及び相対速度ΔVが読み込まれ、ステップS303の判定が「Yes」となり、ステップS307で、先行車検知幅y’が走行車線幅y3に設定されると共に、先行車検知時間t’が“0”に設定され、図7に示すように、自車両の将来の軌道から先行車検知幅y’の範囲内には先行車両が存在しないとすると、ステップS308の判定が「No」となり、ステップS311で、障害物存在フラグF2が障害物が存在しないことを示す“0”のリセット状態にされて、この演算処理が終了される。
【0045】障害物検出処理が終了されると、追従制御処理に復帰して、そのステップS103の判定が「Yes」となり、ステップS106で、車速指令スイッチ20、アクセラレートスイッチ21及びコーストスイッチ22で設定された車速が車速指令値Vsp*とされ、前記ステップS107で車速制御演算処理が実行され、前記ステップS106で算出された車速指令値Vsp*に自車速Vspを一致させるための制駆動トルク指令値Twrを算出する車速制御演算処理が実行され、ステップS108で駆動軸トルク制御演算処理が実行されて、前記ステップS107で算出された制駆動トルク指令値Twrを発生するためのスロットル開度指令値θtvoが演算される。
【0046】そして、追従制御用コントローラ23で算出されたスロットル開度指令値θtvoに応じて、エンジン出力制御装置10でスロットルアクチュエータが制御され、乗員によって設定された車速指令値Vsp*に自車速Vspが制御される。また、上記フローが繰り返し実行されているうちに、自車両が高速道路出口の料金所に近づき、低速走行している先行車両に近づいたとする。すると、障害物存在可能性検出処理で、図3に示すように、ステップS201の判定が「Yes」となり、また自動料金収受システムのゲートを通過していないので、ステップS202の判定が「No」となり、ステップS206で障害物存在可能性フラグF1が障害物の存在する可能性が大きいことを示す“1”のセット状態にされて追従制御処理に復帰し、ステップS102で障害物検出処理が実行される。
【0047】障害物検出処理が実行されると、図4に示すように、ステップS301の判定が「Yes」となり、ステップS302を経て、ステップS303の判定が「No」となり、またステップS304の判定が「Yes」となり、ステップS305で、図5(a)に示すように、先行車検知幅y’が走行車線幅y3より大きく設定(y1)されて、自車両の将来の軌道と先行車検知幅y’とから定まる範囲内に先行車両が存在するようになると共に、図6(a)に示すように、先行車検知時間t’が小さく設定(t1)されて、前記ステップS301で検出された先行車両が継続して検出された時間が前記ステップS305で設定された先行車検知時間t’より大きくなり、ステップS308及びS309の判定が「Yes」となり、ステップS310で障害物存在フラグF2が障害物が存在することを示す“1”のセット状態にされて、この演算処理が終了される。
【0048】障害物検出処理が終了されると、追従制御処理に復帰して、図2に示すように、そのステップS103の判定が「Yes」となり、ステップS104〜S108が実行されて、自車両と先行車両との間の車間距離Dが目標車間距離D*になるように自車速Vspが制御される。このように、本実施形態では、自車両前方に障害物が存在する可能性が大きいと判断されたときに、前記先行車検知幅yを大きく設定すると共に前記先行車検知時間tを小さく設定するため、前記可能性が大きいときには障害物の検出タイミングが早まる。
【0049】また、上記フローが繰り返し実行されているうちに、自車両が高速道路出口の料金所に設置されている自動料金収受システムのゲートを通過したとする。すると、障害物存在可能性検出処理で、図3に示すように、ステップS201を経て、ステップS202の判定が「Yes」となり、ステップS203及びS204を経て、ステップS205で障害物存在可能性フラグF1が 再び“0”のリセット状態にされて、追従制御処理に復帰し、次いでステップS102で障害物検出処理が実行される。
【0050】障害物検出処理が実行されると、図4に示すように、ステップS301の判定が「Yes」となり、ステップS302を経て、先行車両が低速走行していたとすると、ステップS303の判定が「No」となり、またステップS304の判定が「No」となり、ステップS306で、図5(b)に示すように、先行車検知幅y’が走行車線幅y3より小さく設定(y1)されて、図7に示すように、自車両の将来の軌道から先行車検知幅y’の範囲内には先行車両が存在しないとすると、ステップS308の判定が「No」となり、ステップS311で、障害物存在フラグF2が障害物が存在しないことを示す“0”のリセット状態にされて、この演算処理が終了される。
【0051】このように、本実施形態では、自車両前方に障害物が存在する可能性が小さいと判断されたときに、前記先行車検知幅yを小さく設定すると共に前記先行車検知時間tを大きく設定するため、前記可能性が小さいときには障害物の誤検出が抑制される。また、本実施形態にあっては、ナビゲーションシステム17によって、自車両近傍に自動料金収受システムがあることが検出されてから、当該自動料金収受システムの車載器19によってゲートを通過したことが検出されるまでは、自車両前方に障害物が存在する可能性が大きいと判断するため、障害物が存在する可能性の大きさを容易に検出することができる。さらに、自動料金収受システムのゲートを通過したことを検出する手段として、自動料金収受システムの車載器19を用いているため、当該ゲートを通過したことが精度良く検出される。
【0052】また、上記フローが繰り返し実行されているうちに、自車両が高速道路を降りて一般道を走行中に踏切に近づき、踏切前で一旦停止している先行車両に近づいたとする。すると、障害物存在可能性検出処理で、図3に示すように、ステップS201の判定が「No」となり、ステップS203の判定が「Yes」となり、ステップS206で障害物存在可能性フラグF1が“1”のセット状態にされて、この演算処理が終了される。
【0053】このように、本実施形態では、ナビゲーションシステム17からの情報に基づいて、自車両前方に踏切があることが検出されたときに、自車両前方に障害物が存在する可能性が大きいと判断するため、障害物が存在する可能性の大きさを容易に検出することができる。また、上記フローが繰り返し実行されているうちに、自車両が踏切を通過して渋滞に近づき、その渋滞で停止している先行車両に近づいたとする。すると、障害物存在可能性検出処理で、図3に示すように、ステップS201及びS203の判定が「No」となり、ステップS204の判定が「Yes」となり、ステップS206で障害物存在可能性フラグF1が“1”のリセット状態にされて、この演算処理が終了される。
【0054】このように、本実施形態では路側に設置されている機器から送信される外部情報に基づいて、自車両前方に渋滞があることが検出されたときに、自車両前方に障害物が存在する可能性が大きいと判断するため、障害物が存在する可能性の大きさを容易に検出することができる。なお、上記実施形態では、ナビゲーションシステム17、道路情報システムの車載器18及び自動料金システムの車載器19は走行環境検出手段に対応し、障害物存在可能性検出手段に対応し、ステップS101、S201〜S206は障害物存在可能性検出手段に対応し、車間距離センサ12は物体検出手段に対応し、障害物検出手段はステップS102、S303〜S311に対応する。
【0055】また、上記実施の形態は本発明の障害物存在可能性検出装置及び障害物検出装置の一例を示したものであり、装置の構成等を限定するものではない。例えば、ナビゲーションシステム17で自車両前方に踏切が検出されたときに、自車両前方に障害物が存在する可能性が大きいと判断する例を示したが、踏切に限るものではなく、例えば一旦停止、分岐、合流及び料金所の少なくとも一つがあることが検出されたときに、自車両前方に障害物が存在する可能性が大きいと判断するようにしてもよい。
【0056】また、道路情報システムの車載器18で自車両前方に渋滞又は赤信号が検出されたときに、自車両前方に障害物が存在する可能性が大きいと判断する例を示したが、例えば工事、事故、路上落下物等が検出されたときに、自車両前方に障害物が存在する可能性が大きいと判断するようにしてもよい。
【図面の簡単な説明】
【図1】本発明の一実施形態を示す概略構成図である。
【図2】図1の追従制御用コントローラ内で実行される追従制御処理を示すフローチャートである。
【図3】図1の追従制御用コントローラ内で実行される障害物存在可能性検出処理を示すフローチャートである。
【図4】図1の追従制御用コントローラ内で実行される障害物検出処理を示すフローチャートである。
【図5】図4の演算処理に用いられる先行車検知幅を説明するための説明図である。
【図6】図4の演算処理に用いられる先行車検知時間を説明するためのグラフである。
【図7】相対前後位置、相対横位置及び旋回半径の関係を説明するための説明図である。
【図8】図1の追従制御用コントローラ内で実行される車速制御演算処理及び駆動軸トルク制御演算処理の構成を示すブロック図である。
【図9】図1の追従制御用コントローラ内で実行される駆動軸トルク制御演算処理の構成を示すブロック図である。
【符号の説明】
1FL、1FRは前輪
1RL、1RRは後輪
2はエンジン
3は自動変速機
4はプロペラシャフト
5は最終減速装置
6は車軸
7はディスクブレーキ
8は制動制御装置
10はエンジン出力制御装置
12は車間距離センサ
13は車速センサ
14はエンジン回転数センサ
15は変速機状態検出センサ
16はヨーレートセンサ
17はナビゲーションシステム
18は道路情報システムの車載器
19は自動料金収受システムの車載器
23は追従制御用コントローラ
【特許請求の範囲】
【請求項1】 自車両の走行環境を検出する走行環境検出手段と、前記走行環境検出手段で検出された走行環境に基づいて、自車両前方に障害物が存在する可能性の大きさを検出する障害物存在可能性検出手段と、を備えたことを特徴とする障害物存在可能性検出装置。
【請求項2】 前記走行環境検出手段は、自車位置情報と地図情報とに基づいて、自車両前方に、踏切、一旦停止、分岐、合流及び料金所の少なくとも一つがあることを検出し、前記障害物存在可能性検出手段は、前記走行環境検出手段で踏切、一旦停止、分岐、合流及び料金所の少なくとも一つがあることが検出されたときに、自車両前方に障害物が存在する可能性が大きいと判断することを特徴とする請求項1に記載の障害物存在可能性検出装置。
【請求項3】 前記走行環境検出手段は、自車両近傍に自動料金収受システムのゲートがあることを検出するゲート存在検出手段と、自車両が自動料金収受システムのゲートを通過したことを検出するゲート通過検出手段と、を有し、前記障害物存在可能性検出手段は、前記ゲート存在検出手段で自動料金収受システムがあることが検出されてから、前記ゲート通過手段で当該自動料金収受システムのゲートを通過したことが検出されるまでは、自車両前方に障害物が存在する可能性が大きいと判断し、前記ゲート通過手段で当該ゲートを通過したことが検出されてからは前記可能性が小さいと判断することを特徴とする請求項1又は請求項2に記載の障害物存在可能性検出装置。
【請求項4】 前記走行環境検出手段は、外部からの情報に基づいて、自車両前方の渋滞、赤信号、工事、事故及び路上落下物の少なくとも一つを検出し、前記障害物存在可能性検出手段は、前記走行環境検出手段で渋滞及び赤信号の少なくとも一つが検出されたときに、自車両前方に障害物が存在する可能性が大きいと判断することを特徴とする請求項1乃至請求項3のいずれかに記載の障害物存在可能性検出装置。
【請求項5】 前記請求項1乃至請求項4のいずれかの障害物存在可能性検出装置と、自車両前方に存在する物体を検出する物体検出手段と、前記物体検出手段で検出された物体が障害物であることを検出する障害物検出手段と、を備え、前記障害物検出手段は、前記障害物存在可能性検出装置で判断される前記可能性の大きさに応じて、前記物体検出手段で検出された物体が障害物であることを検出する方法を変更することを特徴とする障害物検出装置。
【請求項6】 前記障害物検出手段は、前記物体検出手段で検出された物体のうち移動速度が所定値より小さいものを検出する障害物候補検出手段と、自車両の将来の軌道を推定する軌道推定手段と、前記障害物候補検出手段で検出された物体が前記軌道推定手段で推定された軌道から所定範囲内にあるときに当該物体が障害物であると判断する障害物判断手段と、を有し、前記障害物判断手段は、前記障害物存在可能性検出装置で自車両前方に障害物が存在する可能性が大きいと判断されたときに前記所定範囲を大きく設定し、自車両前方に障害物が存在する可能性が小さいと判断されたときに前記所定範囲を小さく設定することを特徴とする請求項5に記載の障害物検出装置。
【請求項7】 前記障害物判断手段は、前記物体検出手段で検出された物体のうち移動速度が所定値より小さいものを検出する障害物候補検出手段と、前記障害物候補検出手段で所定時間以上継続して検出されている物体があるときに当該物体が障害物であると判断する障害物判断手段と、を有し、前記障害物判断手段は、前記障害物存在可能性検出装置で自車両前方に障害物が存在する可能性が大きいと判断されたときに前記所定時間を小さく設定し、自車両前方に障害物が存在する可能性が小さいと判断されたときに前記所定時間を大きく設定することを特徴とする請求項5又は請求項6に記載の障害物検出装置。
【請求項1】 自車両の走行環境を検出する走行環境検出手段と、前記走行環境検出手段で検出された走行環境に基づいて、自車両前方に障害物が存在する可能性の大きさを検出する障害物存在可能性検出手段と、を備えたことを特徴とする障害物存在可能性検出装置。
【請求項2】 前記走行環境検出手段は、自車位置情報と地図情報とに基づいて、自車両前方に、踏切、一旦停止、分岐、合流及び料金所の少なくとも一つがあることを検出し、前記障害物存在可能性検出手段は、前記走行環境検出手段で踏切、一旦停止、分岐、合流及び料金所の少なくとも一つがあることが検出されたときに、自車両前方に障害物が存在する可能性が大きいと判断することを特徴とする請求項1に記載の障害物存在可能性検出装置。
【請求項3】 前記走行環境検出手段は、自車両近傍に自動料金収受システムのゲートがあることを検出するゲート存在検出手段と、自車両が自動料金収受システムのゲートを通過したことを検出するゲート通過検出手段と、を有し、前記障害物存在可能性検出手段は、前記ゲート存在検出手段で自動料金収受システムがあることが検出されてから、前記ゲート通過手段で当該自動料金収受システムのゲートを通過したことが検出されるまでは、自車両前方に障害物が存在する可能性が大きいと判断し、前記ゲート通過手段で当該ゲートを通過したことが検出されてからは前記可能性が小さいと判断することを特徴とする請求項1又は請求項2に記載の障害物存在可能性検出装置。
【請求項4】 前記走行環境検出手段は、外部からの情報に基づいて、自車両前方の渋滞、赤信号、工事、事故及び路上落下物の少なくとも一つを検出し、前記障害物存在可能性検出手段は、前記走行環境検出手段で渋滞及び赤信号の少なくとも一つが検出されたときに、自車両前方に障害物が存在する可能性が大きいと判断することを特徴とする請求項1乃至請求項3のいずれかに記載の障害物存在可能性検出装置。
【請求項5】 前記請求項1乃至請求項4のいずれかの障害物存在可能性検出装置と、自車両前方に存在する物体を検出する物体検出手段と、前記物体検出手段で検出された物体が障害物であることを検出する障害物検出手段と、を備え、前記障害物検出手段は、前記障害物存在可能性検出装置で判断される前記可能性の大きさに応じて、前記物体検出手段で検出された物体が障害物であることを検出する方法を変更することを特徴とする障害物検出装置。
【請求項6】 前記障害物検出手段は、前記物体検出手段で検出された物体のうち移動速度が所定値より小さいものを検出する障害物候補検出手段と、自車両の将来の軌道を推定する軌道推定手段と、前記障害物候補検出手段で検出された物体が前記軌道推定手段で推定された軌道から所定範囲内にあるときに当該物体が障害物であると判断する障害物判断手段と、を有し、前記障害物判断手段は、前記障害物存在可能性検出装置で自車両前方に障害物が存在する可能性が大きいと判断されたときに前記所定範囲を大きく設定し、自車両前方に障害物が存在する可能性が小さいと判断されたときに前記所定範囲を小さく設定することを特徴とする請求項5に記載の障害物検出装置。
【請求項7】 前記障害物判断手段は、前記物体検出手段で検出された物体のうち移動速度が所定値より小さいものを検出する障害物候補検出手段と、前記障害物候補検出手段で所定時間以上継続して検出されている物体があるときに当該物体が障害物であると判断する障害物判断手段と、を有し、前記障害物判断手段は、前記障害物存在可能性検出装置で自車両前方に障害物が存在する可能性が大きいと判断されたときに前記所定時間を小さく設定し、自車両前方に障害物が存在する可能性が小さいと判断されたときに前記所定時間を大きく設定することを特徴とする請求項5又は請求項6に記載の障害物検出装置。
【図1】


【図2】
【図5】
【図6】

【図3】
【図7】
【図8】
【図4】
【図9】

【図2】
【図5】
【図6】
【図3】
【図7】
【図8】
【図4】
【図9】
【公開番号】特開2003−141698(P2003−141698A)
【公開日】平成15年5月16日(2003.5.16)
【国際特許分類】
【出願番号】特願2001−340909(P2001−340909)
【出願日】平成13年11月6日(2001.11.6)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
【公開日】平成15年5月16日(2003.5.16)
【国際特許分類】
【出願日】平成13年11月6日(2001.11.6)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
[ Back to top ]