
障害物検出装置及びプログラム
【課題】簡易な構成で、前方に存在する障害物を精度よく検出することができるようにする。
【解決手段】前照灯投光装置によって、光が照射される照射領域の上端部であるカットライン境界部分の明度が変化するように前方を照射する。撮像装置12によって、自車両の前方を撮像する。カットライン検出部20によって、撮像された画像から、高さ方向の輝度変化に基づいて、カットライン境界部分のエッジ対を検出する。障害物検出部22によって、検出されたカットライン境界部分のエッジ対の高さ方向の幅に基づいて、自車両の前方に存在する障害物を検出する。
【解決手段】前照灯投光装置によって、光が照射される照射領域の上端部であるカットライン境界部分の明度が変化するように前方を照射する。撮像装置12によって、自車両の前方を撮像する。カットライン検出部20によって、撮像された画像から、高さ方向の輝度変化に基づいて、カットライン境界部分のエッジ対を検出する。障害物検出部22によって、検出されたカットライン境界部分のエッジ対の高さ方向の幅に基づいて、自車両の前方に存在する障害物を検出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、障害物検出装置及びプログラムに係り、特に、撮像手段によって撮像した画像から、前方に存在する障害物を検出する障害物検出装置及びプログラムに関する。
【背景技術】
【0002】
従来より、画像処理ユニットが、1台の赤外線カメラが撮像した赤外線画像を解析することにより物体の高さ及び影の高さを検出し、検出された物体の高さと影の高さの比率、及び物体に対する影の角度を算出し、算出された比率と角度とに基づいて車両から物体までの距離を算出する画像認識装置が知られている(特許文献1)。
【0003】
また、自動車の後部をカメラで撮影してモニタに表示するもので、2つの赤外線投光器によりスリット光を撮影エリアに照射し、カメラで撮影する周辺画像表示装置が知られている(特許文献2)。この周辺画像表示装置では、制御装置によって、スリット光照射画像とスリット光未照射画像とから、その差分画像データを演算し、スリット光の画像データを得ると、このスリット光の画像パターンが撮影エリア内に立体物が存在しない状態のパターンに対して異なるときに、その部分に立体物が存在することを推定しモニタに表示する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−92448号公報
【特許文献2】特開2004−328240号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記の特許文献1に記載の技術では、投光器によって路面に生じた障害物の影の高さに基づいて障害物までの距離を計算するため、投光器設置高さよりも高い障害物は原理的に検出できない、という問題がある。特に投光器設置高さは高々1m程度なので、一般の大人の歩行者は検出ができない。また、投光のため赤外投光器が必要であり、その設置のためのコストが高くなってしまう、という問題がある。
【0006】
また、上記の特許文献2に記載の技術では、スリット光を照射して撮像したパターンから障害物の有無を判定するため、壁など表面積の大きいものは検出できるが、スリット光間隔に比べて幅が小さくなる物体(歩行者など)は検出が困難である、という問題がある。また、スリット光を照射するための近赤外投光器が必要であり、その設置のためのコストが高くなる、という問題がある。
【0007】
本発明は、上記の問題点を解決するためになされたもので、簡易な構成で、前方に存在する障害物を精度よく検出することができる障害物検出装置及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0008】
上記の目的を達成するために本発明に係る障害物検出装置は、自車両の前方を照射し、かつ、光が照射される照射領域の高さ方向の上端部及び下端部の少なくとも一方を、前記上端部より下側又は前記下端部より上側に比べて明度が変化するように前方を照射する照明手段と、前記照明手段の照明位置と高さ方向の位置が異なるように設置され、かつ、自車両の前方を撮像する撮像手段と、前記撮像手段によって撮像された画像から、前記高さ方向の輝度変化に基づいて、前記上端部及び前記下端部の少なくとも一方を表わす明度変化領域を検出する明度変化領域検出手段と、前記明度変化領域検出手段によって検出された前記明度変化領域の高さ方向の幅に基づいて、自車両の前方に存在する障害物を検出する障害物検出手段と、を含んで構成されている。
【0009】
本発明に係るプログラムは、コンピュータを、自車両の前方を照射し、かつ、光が照射される照射領域の高さ方向の上端部及び下端部の少なくとも一方を、前記上端部より下側又は前記下端部より上側に比べて明度が変化するように前方を照射する照明手段の照明位置と高さ方向の位置が異なるように設置され、かつ、自車両の前方を撮像する撮像手段によって撮像された画像から、前記高さ方向の輝度変化に基づいて、前記上端部及び前記下端部の少なくとも一方を表わす明度変化領域を検出する明度変化領域検出手段、及び前記明度変化領域検出手段によって検出された前記明度変化領域の高さ方向の幅に基づいて、自車両の前方に存在する障害物を検出する障害物検出手段として機能させるためのプログラムである。
【0010】
本発明によれば、照明手段によって、光が照射される照射領域の高さ方向の上端部及び下端部の少なくとも一方を、前記上端部より下側又は前記下端部より上側に比べて明度が変化するように前方を照射する。撮像手段によって、前記照明手段の照明位置と高さ方向の位置が異なるように設置され、かつ、自車両の前方を撮像する。
【0011】
そして、明度変化領域検出手段によって、前記撮像手段によって撮像された画像から、前記高さ方向の輝度変化に基づいて、前記上端部及び前記下端部の少なくとも一方を表わす明度変化領域を検出する。障害物検出手段によって、前記明度変化領域検出手段によって検出された前記明度変化領域の高さ方向の幅に基づいて、自車両の前方に存在する障害物を検出する。
【0012】
このように、撮像した画像における、照明手段による照射領域の上端部又は下端部の明度変化領域の高さ方向の幅に基づいて、自車両の前方に存在する障害物を検出することにより、簡易な構成で、前方に存在する障害物を精度よく検出することができる。
【0013】
本発明に係る障害物検出手段は、前記明度変化領域検出手段によって検出された前記明度変化領域の高さ方向の幅が、障害物が存在しない場合における前記明度変化領域の高さ方向の幅より小さい所定幅となる領域を、前記障害物が存在する領域として検出するようにすることができる。
【0014】
本発明に係る障害物検出装置は、前記障害物検出手段によって検出された障害物が存在する領域における前記明度変化領域の高さ方向の上端及び下端の何れか一方の位置に基づいて、前記障害物までの距離を推定する距離推定手段を更に含むようにすることができる。また、上記の障害物検出装置は、前記距離推定手段によって推定された前記障害物までの距離、及び前記障害物の左右方向の位置に基づいて、前記障害物との衝突危険性を判定する衝突判定手段を更に含むようにすることができる。
【発明の効果】
【0015】
以上説明したように、本発明の障害物検出装置及びプログラムによれば、撮像した画像における、照明手段による照射領域の上端部又は下端部の明度変化領域の高さ方向の幅に基づいて、自車両の前方に存在する障害物を検出することにより、簡易な構成で、前方に存在する障害物を精度よく検出することができる、という効果が得られる。
【図面の簡単な説明】
【0016】
【図1】本発明の第1の実施の形態に係る障害物検出装置の構成を示す概略図である。
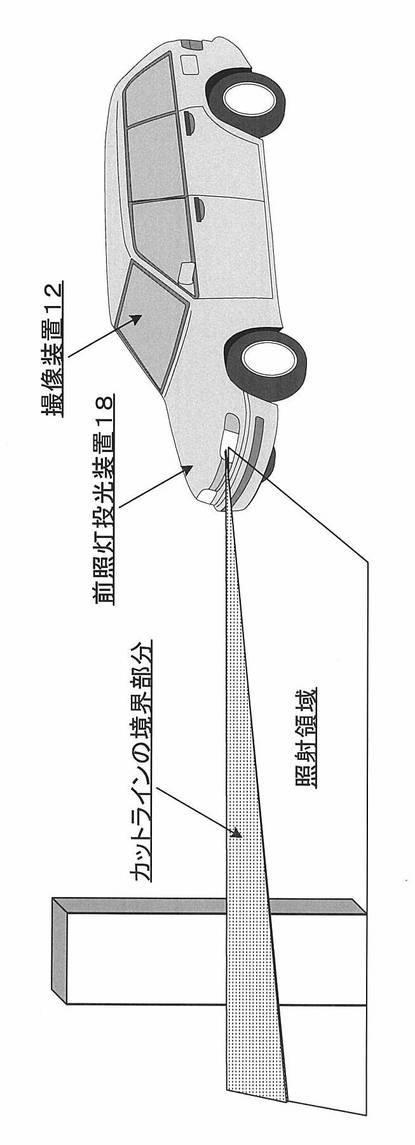
【図2】前照灯投光装置及び撮像装置の配置を示す図である。
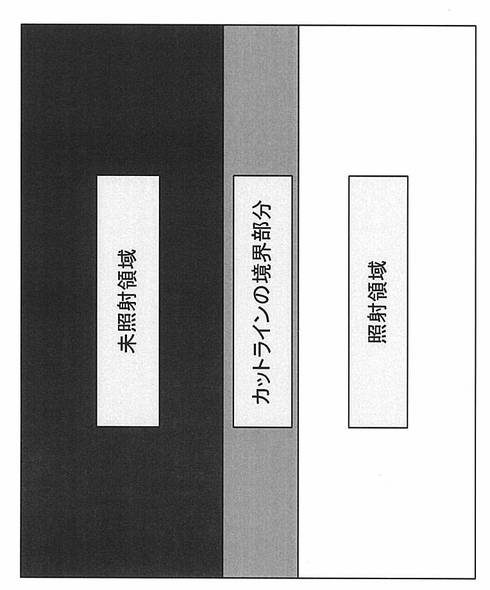
【図3】カットラインの境界部分を説明するための図である。
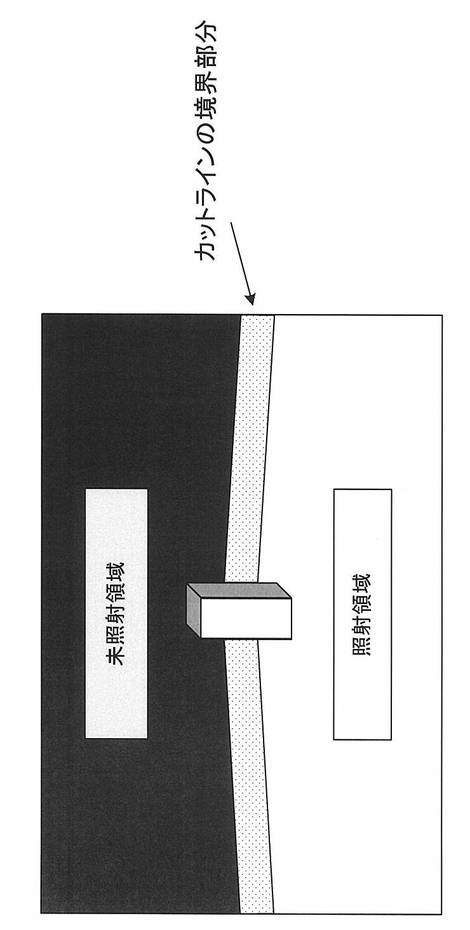
【図4】カットラインの境界部分を撮像した画像を示す図である。
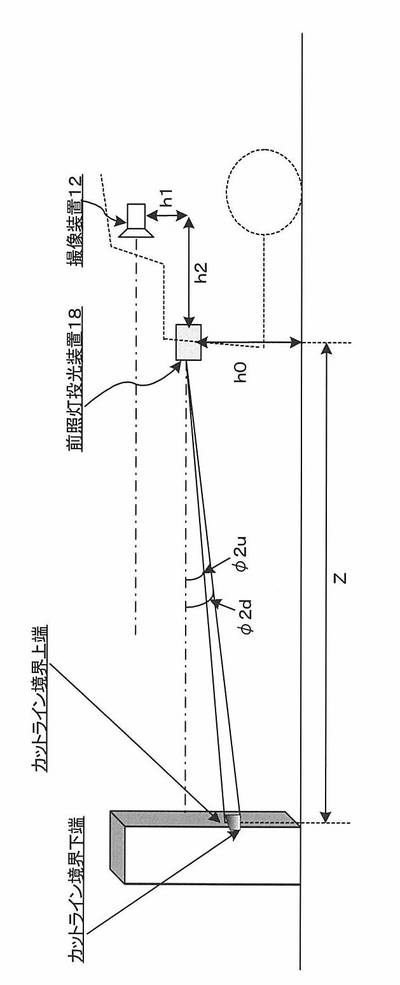
【図5】カットライン境界部分の幅により障害物が検出される原理を説明するための図である。
【図6】カットライン境界部分の高さ方向の幅を求める様子を示す図である。
【図7】障害物までの距離を推定する方法を説明するための図である。
【図8】カットライン境界部分の角度を計算する方法を説明するための図である。
【図9】(A)画像上の障害物の位置を示す図、及び(B)走行平面上の障害物の位置を示す図である。
【図10】本発明の第1の実施の形態に係る障害物検出装置のコンピュータにおける障害物検出処理ルーチンの内容を示すフローチャートである。
【図11】本発明の第2の実施の形態に係る障害物検出装置の構成を示す概略図である。
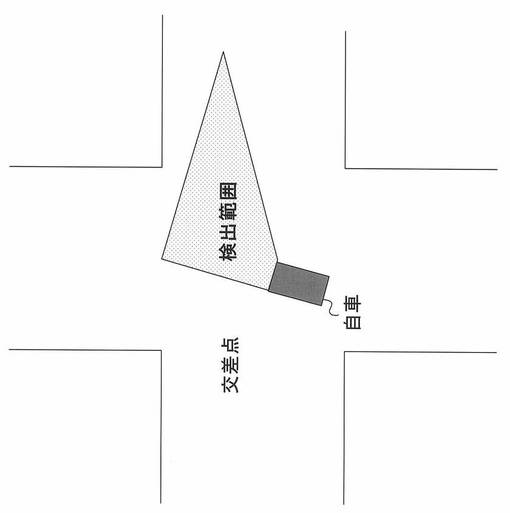
【図12】右折時に検出範囲を右側へ拡大する様子を示す図である。
【発明を実施するための形態】
【0017】
以下、図面を参照して本発明の実施の形態を詳細に説明する。なお、車両に搭載され、障害物との衝突危険性がある場合に警報出力を行なう障害物検出装置に本発明を適用した場合を例に説明する。
【0018】
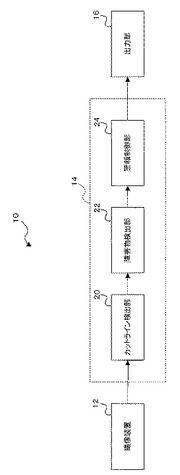
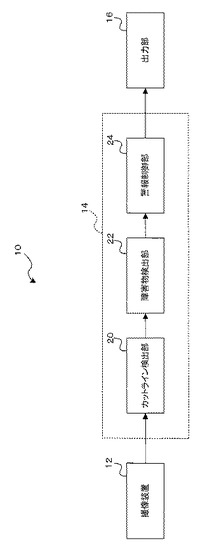
図1に示すように、第1の実施の形態に係る障害物検出装置10は、車両(図示省略)に取り付けられ、かつ、車両の前方を撮像して画像を生成する撮像装置12と、撮像装置12及から得られる撮像画像に基づいて、障害物を検出すると共に、障害物との衝突危険性がある場合に出力部16により警報を出力するコンピュータ14と、出力部16とを備えている。
【0019】
また、障害物検出装置10を搭載している車両には、図2に示すように、自車両前方を照射する前照灯投光装置18が設けられている。
【0020】
前照灯投光装置18には、ロービームユニットとハイビームユニットが搭載されており、それぞれのユニットはハロゲンランプもしくは白色LEDランプにより構成されている。ロービームユニットとハイビームユニットには、前照灯投光装置18を制御する投光制御装置(図示省略)と電源(図示省略)とが接続されている。そして、投光制御装置には、車室内に設けられた点灯スイッチ(図示省略)とHI/LO切換スイッチ(図示省略)が接続されている。投光制御装置は、HI/LO切換スイッチがLO側に操作された状態ではロービームユニットを点灯させ、HI側ではハイビームユニットを点灯させる。
【0021】
前照灯投光装置18は、光の照射領域の上端部である帯状のカットライン境界部分に、照射領域の中央部に対して明暗変化を付加した前照灯により、自車両の前方の走行環境を照明する。なお、カットライン境界部分が、明度変化領域の一例である。
【0022】
前照灯投光装置18による照射領域の上端部のカットライン境界部分は、未照射領域から照射領域まで連続的に明るさを変化させるようにしてもよいし、図3に示すように、未照射領域と照射領域の中間の明度となるように設定されていてもよい。また、前照灯投光装置18において、カットライン境界部分に対応させてフィルタを付加することにより、カットライン境界部分の明るさを設定するようにしてもよい。
【0023】
上記図2に示すように、車室内リアビューミラー位置に、撮像装置12が設置されていて、図4に示すような前照灯投光装置18で照明された前方走行画像を撮像することができる。なお、撮像装置12は、後述するように、前照灯投光装置18による投光位置とは高さ方向の位置が異なるように設置されていればよく、車室内リアビューミラー位置以外の位置に、撮像装置12を設置しても良い。
【0024】
また、撮像装置12は、例えばCCD等の固体撮像素子を使用したCCDカメラ等を使用することができ、CCDカメラで生成されたアナログ信号である画像信号をデジタル信号に変換するA/D変換部(図示省略)、及びA/D変換された画像信号を一時的に格納するための画像メモリ(図示省略)を備えている。
【0025】
コンピュータ14は、障害物検出装置10全体の制御を司るCPU、後述する障害物検出処理ルーチンのプログラム等を記憶した記憶媒体としてのROM、ワークエリアとしてデータを一時格納するRAM、及びこれらを接続するバスを含んで構成されている。このような構成の場合には、各構成要素の機能を実現するためのプログラムをROMに記憶しておき、これをCPUが実行することによって、各機能が実現されるようにする。
【0026】
このコンピュータ14をハードウエアとソフトウエアとに基づいて定まる機能実現手段毎に分割した機能ブロックで説明すると、上記図1に示すように、撮像装置12によって撮像された画像から、カットライン境界部分を検出するカットライン検出部20、検出されたカットライン境界部分に基づいて、障害物の有無を検出する障害物検出部22、および検出された障害物との衝突危険性がある場合に出力部16により警報を出力するように制御する警報制御部24とを備えている。なお、障害物検出部22が、障害物検出手段及び距離推定手段の一例であり、警報制御部24が、衝突判定手段の一例である。
【0027】
ここで、本実施の形態に係る障害物を検出する原理について説明する。
【0028】
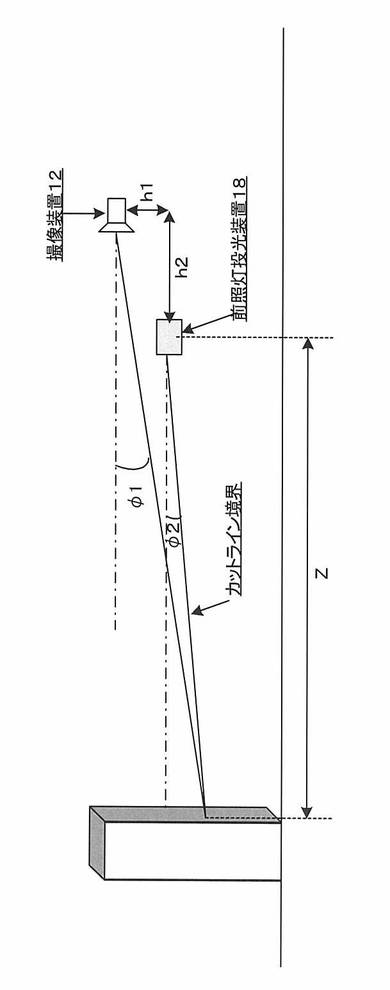
まず、図5に示す撮像装置12と前照灯投光装置18の配置を想定する。カメラ光軸が水平になるように撮像装置12を取り付け、投光されるカットライン境界部分がやや下向きに投光されるように前照灯投光装置18を取り付ける。
【0029】
障害物上に投光されたカットライン境界部分について、カメラ撮像面上に投影された高さ方向の幅Δiyは、以下の(1)式で計算できる。
【0030】
【数1】

【0031】
ただし、fは焦点距離であり、Zは前照灯投光装置18から障害物までの距離である。φ2uは、水平方向に対する、前照灯投光装置18により投射したカットライン境界部分の上端の方向の角度であり、φ2dは、水平方向に対する、前照灯投光装置18により投射したカットライン境界部分の下端の方向の角度である。h2は、撮像装置12と前照灯投光装置18との前後方向の間隔である。
【0032】
次に、路面上に投光されたカットライン境界部分について、カメラ撮像面上に投影された高さ方向の幅Δiy’は、以下の(2)式で計算できる。このとき、路面は平面と仮定している。
【0033】
【数2】
【0034】
ただし、h1は、撮像装置12と前照灯投光装置18との高さ方向の間隔であり、h0は、前照灯投光装置18の路面からの高さである。
【0035】
上記(1)式と(2)式により、ΔiyとΔiy’は距離Zに関らずほぼ一定の値になり、Δiy≦Δiy’となることが分かる。例えば、h0=0.5[m]、h1=0.7[m]、h2=1.5[m]、φ2u=1[deg]、φ2d=3[deg]の場合、Δiy:Δiy’≒1:2となり、カットライン境界部分の高さ方向の幅により、障害物上に投光されたカットライン境界部分と、路面上に投光されたカットライン境界部分とは明らかに区別することができる。
【0036】
そこで、本実施の形態では、カットライン検出部20によって、撮像装置12によって撮像された画像について、高さ方向の輝度変化に基づいて、カットライン境界部分のエッジを検出する。例えば、画像を縦方向にスキャンして、画像の輝度を微分してエッジを検出する。カットライン検出部20では、照射領域のカットライン境界部分のエッジ対が検出される。
【0037】
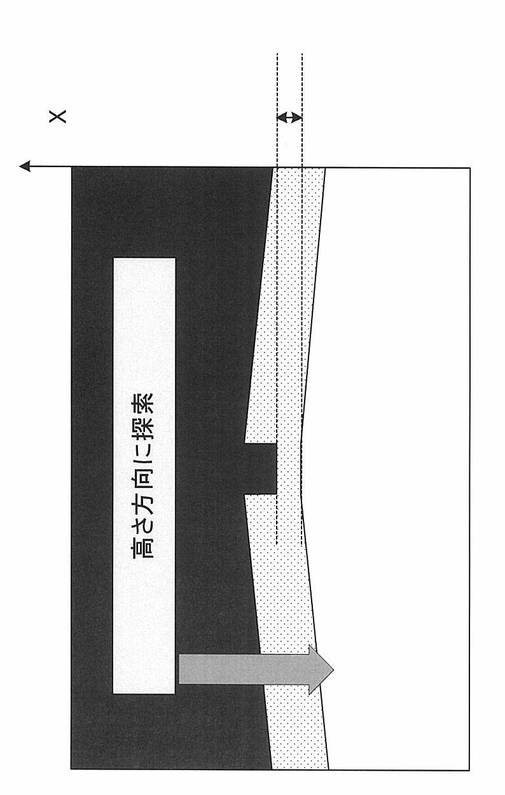
障害物検出部22は、図6に示すように、検出されたカットライン境界部分のエッジ対について、高さ方向に探索して高さ方向の幅を求め、求められた幅に基づいて、前方の障害物の有無を検出する。前照灯投光装置18と撮像装置12との位置の間隔が近く、障害物が立体的であれば、上述したように、障害物までの距離に関りなく、障害物上に投射されたカットライン境界部分の高さ方向(y軸方向)の間隔はほぼ一定値になる。カットライン境界部分のエッジ対から、高さ方向の幅が予め設定された幅の範囲内となるエッジ対を、障害物候補として検出し、検出された障害物候補のエッジ対を、画像上の距離の近さでグルーピングする。グルーピングされた障害物候補の大きさが、自車進路上に存在する歩行者程度の大きさを含む所定範囲の大きさであれば、グルーピングされた障害物候補を含む範囲を、障害物領域として検出する。なお、予め設定される幅の範囲は、上記(1)式を用いて得られる幅に基づいて求めればよく、障害物が存在しない場合におけるカットライン境界部分の高さ方向の幅より小さい値となる。
【0038】
障害物検出部22は、検出された障害物領域の代表的な位置について、図7に示すように、以下の(3)式に従って障害物までの距離Zを推定する。
【0039】
【数3】
【0040】
ただし、φ1は、水平方向に対する、撮像装置12で検出したカットライン境界部分の上端の方向の角度であり、φ2は、水平方向に対する、前照灯投光装置18で投射したカットライン境界部分の上端の方向の角度である。
【0041】
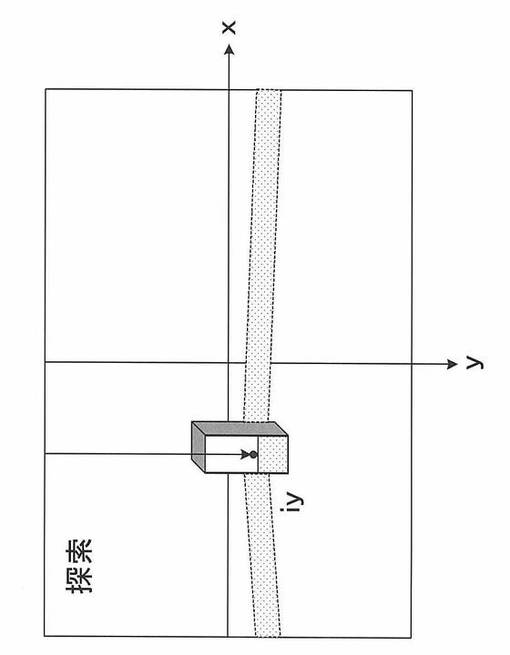
なお、図8に示すように、画像を高さ方向(y方向)に探索して検出した輝度変化点(エッジ)の座標iyから、角度φは以下の(4)式で求めることができる。このとき、fは画素で換算した焦点距離であり、撮像装置12は水平に設置して、画像中心が原点であると仮定する。
【0042】
【数4】
【0043】
障害物検出部22は、検出された障害物領域の代表的な位置のエッジ対の上側のエッジ座標iyを用いて、上記(4)式に従って、水平方向に対する、撮像装置12で検出したカットライン境界部分の上端の方向の角度φ1を算出し、上記(3)式に従って、障害物までの距離Zを推定する。
【0044】
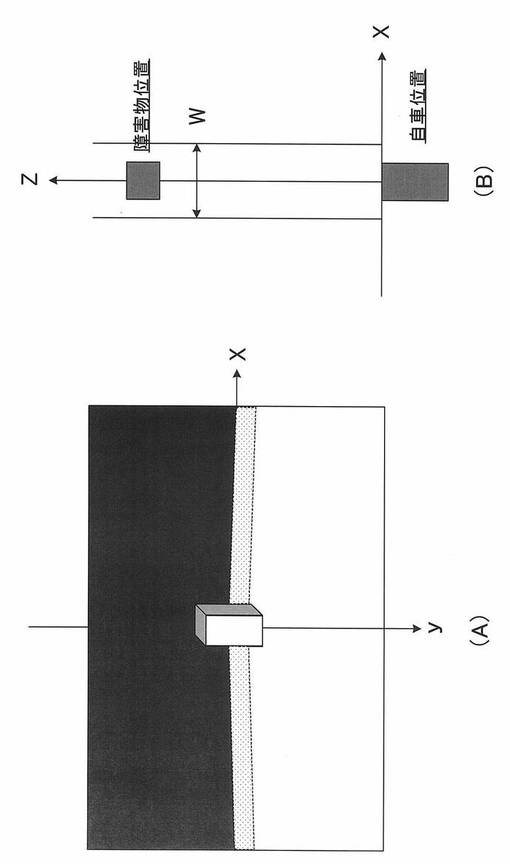
障害物検出部22は、さらに、検出された障害物領域の代表的な位置における、画像上の左右方向の位置x(図9(A)参照)と、推定された障害物までの距離Zとに基づいて、以下の(5)式により、走行平面上のX座標値(自車位置を原点とする座標系)を推定する(図9(B)参照)。
【0045】
【数5】
【0046】
警報制御部24は、推定された障害物までの距離Zと障害物のX座標値とに基づいて、障害物との衝突危険性があるか否かを判定する。例えば、障害物までの距離Zが設定距離以下で、自車の進路上にあれば(|X|<W/2)、障害物が進路上にあって衝突危険性があると判定する。ただし、Wは、自車両の車幅である。
【0047】
警報制御部24は、障害物との衝突危険性があると判定すると、出力部16により、ドライバに対して警報を出力するように制御する。
【0048】
ここで、撮像装置12の設置位置に関して説明する。
【0049】
撮像装置12と前照灯投光装置18の間の間隔が狭い場合は、上記(1)式と(2)式にh1=h2=0を代入した場合に相当する。この場合、上記(1)式と(2)式より、Δiy=Δiy’となることがわかり、画像上で検出したカットライン境界部分の幅から障害物かどうかを判定することができなくなる。そこで、本実施の形態では、撮像装置12と前照灯投光装置18の間の距離は離れている必要があり、特に高さ方向の間隔h1を開ける必要がある。通常の前照灯投光装置18の位置に対して、車室内のリアビューミラーの位置に撮像装置12を設置すればよく、h1は0.5m程度であることが望ましい。
【0050】
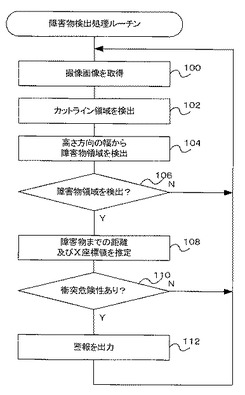
次に、本実施の形態に係る障害物検出装置10の作用について説明する。障害物検出装置10を搭載した車両の走行中に、撮像装置12によって車両の前方の所定領域が撮像されると、コンピュータ14において、図10に示す障害物検出処理ルーチンが実行される。
【0051】
ステップ100で、撮像装置12で撮像された画像を取得する。次のステップ102において、上記ステップ100で取得した画像から、カットライン境界部分を検出する。ステップ104において、上記ステップ102で検出されたカットライン境界部分を高さ方向に探索し、高さ方向の幅が所定の範囲内となるエッジ対を、障害物候補として検出する。検出された障害物候補のエッジ対をグルーピングして、グルーピングされた障害物候補の大きさが、所定範囲内の大きさであれば、グルーピングされた障害物候補を、障害物領域として検出する。
【0052】
次のステップ106では、上記ステップ104で障害物領域が検出されたか否かを判定する。障害物領域が検出されなかった場合には、上記ステップ100へ戻る。一方、障害物領域が検出された場合には、ステップ108において、障害物領域の代表的な位置について、上記(3)式、(4)式を用いて障害物までの距離を推定する。また、上記(5)式を用いて、障害物が存在する位置のX座標値を推定する。
【0053】
次のステップ110では、上記ステップ108で推定された障害物までの距離及びX座標値に基づいて、障害物との衝突危険性があるか否かを判定する。障害物との衝突危険性がない場合には、上記ステップ100へ戻る。一方、障害物との衝突危険性がある場合には、ステップ112において、警報を出力するように出力部16を制御して、上記ステップ100へ戻る。
【0054】
以上説明したように、第1の実施の形態に係る障害物検出装置によれば、自車両前方を撮像した画像における、前照灯投光装置による照射領域のカットライン境界部分の高さ方向の幅が、所定範囲内であるか否かに基づいて、自車両の前方に存在する障害物を検出することにより、簡易な構成で、前方に存在する障害物を精度よく検出することができる。
【0055】
また、ステレオ視のための複数カメラや、近赤外投光器を使用せずに単眼カメラで前方の障害物を検出することができる。また、単眼移動ステレオ法では停車中は立体物検出ができないが、本実施の形態では停車中でも立体物(障害物)を検出することができる。
【0056】
また、スリット光を斜め下方へ投光して、カメラで撮像したスリット光の投射パターンから障害物を検出する従来方法では、比較的近傍の障害物しか検出できない、ピッチングや路面勾配により地面を障害物と誤検出する、という問題点があった。本実施の形態では、前照灯の明暗境界部分(カットライン境界部分)に着目し、カットライン境界部分の明るさの変化を特徴として検出することにより、立体障害物上に投射されたカットライン境界部分をロバストに検出することができる。スリット光の方式のように立体物の手がかりとして路面に対する投射パターンを利用しないため、ピッチングや路面勾配変化にもロバストになる。また、スリット光に比べて、前照灯のカットラインの方が明瞭でありカメラで検出しやすいので、遠方の立体障害物を検出することができる。
【0057】
次に、第2の実施の形態について説明する。なお、第1の実施の形態と同様の構成となる部分については、同一符号を付して説明を省略する。
【0058】
第2の実施の形態では、照明をオンオフさせたときの画像の差分画像から、カットライン境界部分を検出している点が、第1の実施の形態と異なっている。
【0059】
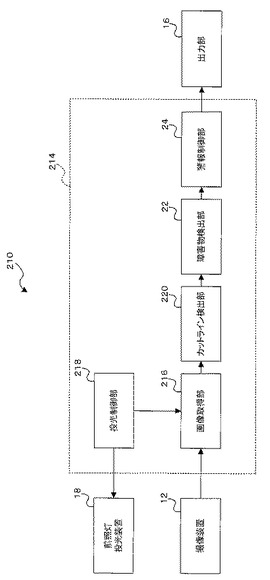
図11に示すように、第2の実施の形態に係る障害物検出装置210のコンピュータ214は、画像取得部216、投光制御部218、カットライン検出部220、障害物検出部22、及び警報制御部24を備えている。
【0060】
投光制御部218は、前照灯投光装置18のロービームユニットを瞬間的にOFF/ONすると共に、OFF/ONの同期信号を画像取得部216へ出力する。
【0061】
画像取得部216は、同期信号に基づいて、前照灯投光装置18のロービームのOFF/ONに同期して撮像された2枚の画像(消灯時の画像と照明時の画像)を撮像装置12から取得する。
【0062】
カットライン検出部220は、画像取得部216によって取得した2枚の画像の差分画像を計算し、差分画像から、高さ方向の輝度変化に基づいて、カットライン境界部分のエッジ対を検出する。
【0063】
なお、第2の実施の形態に係る障害物検出装置の他の構成及び作用については、第1の実施の形態と同様のであるため、説明を省略する。
【0064】
このように、第2の実施の形態に係る障害物検出装置によれば、照明オンオフ時の画像の差分画像を計算するため、カットライン境界部分のエッジを適切な閾値によりロバストに検出できる。
【0065】
なお、上記の第1の実施の形態及び第2の実施の形態では、前照灯投光装置が投射するカットライン境界部分の角度幅が一定である場合を例に説明したが、これに限定されるものではない。例えば、前照灯投光装置が投射するカットライン境界部分の角度幅を、周期的あるいはランダムに変化させるようにしてもよい。そのときの画像を撮像して障害物を検出することにより、よりロバストに立体障害物を検出することができる。これは、前記(1)式と(2)式により、カットライン境界部分の角度幅に関わらずΔiyとΔiy’はほぼ一定の値となり、障害物上に投光されたカットライン境界部分と、路面上に投光されたカットライン境界部分とは明らかに区別できるためである。
【0066】
また、前照灯投光装置によるヘッドライト光の上端部であるカットラインを使用して障害物を検出する場合を例に説明したが、ヘッドライト光の下端部であるカットライン境界部分を検出して、車体に近接した小物体(かがんだ子供など)を検出するようにしてもよい。
【0067】
また、車両に搭載されたナビゲーションシステムと連携して、図12に示すように、交差点を右折する場合に、右側へ検出範囲を拡大して、障害物の検出処理を行うようにしてもよい。また、ナビ情報と連携して、交差点を右左折する場合に限定して、障害物の検出処理を行うようにしてもよい。
【0068】
また、レーザレーダやミリ波レーダ等のセンサを利用して獲得した距離情報を更に用いて、障害物を検出することにより、より高い信頼度で障害物を検出するようにしてもよい。
【0069】
また、本実施の形態の障害物検出装置の各部をコンピュータで実現した場合を例に説明したが、これに限定されるものではなく、各部の機能を実現する複数のコンピュータ、または1つまたは複数の電子回路で構成するようにしてもよい。
【0070】
また、本願明細書中において、プログラムが予めインストールされている実施形態として説明したが、当該プログラムをCDROM等の記憶媒体に格納して提供することも可能である。
【符号の説明】
【0071】
10、210 障害物検出装置
12 撮像装置
14、214 コンピュータ
18 前照灯投光装置
20、220 カットライン検出部
22 障害物検出部
24 警報制御部
216 画像取得部
218 投光制御部
【技術分野】
【0001】
本発明は、障害物検出装置及びプログラムに係り、特に、撮像手段によって撮像した画像から、前方に存在する障害物を検出する障害物検出装置及びプログラムに関する。
【背景技術】
【0002】
従来より、画像処理ユニットが、1台の赤外線カメラが撮像した赤外線画像を解析することにより物体の高さ及び影の高さを検出し、検出された物体の高さと影の高さの比率、及び物体に対する影の角度を算出し、算出された比率と角度とに基づいて車両から物体までの距離を算出する画像認識装置が知られている(特許文献1)。
【0003】
また、自動車の後部をカメラで撮影してモニタに表示するもので、2つの赤外線投光器によりスリット光を撮影エリアに照射し、カメラで撮影する周辺画像表示装置が知られている(特許文献2)。この周辺画像表示装置では、制御装置によって、スリット光照射画像とスリット光未照射画像とから、その差分画像データを演算し、スリット光の画像データを得ると、このスリット光の画像パターンが撮影エリア内に立体物が存在しない状態のパターンに対して異なるときに、その部分に立体物が存在することを推定しモニタに表示する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−92448号公報
【特許文献2】特開2004−328240号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記の特許文献1に記載の技術では、投光器によって路面に生じた障害物の影の高さに基づいて障害物までの距離を計算するため、投光器設置高さよりも高い障害物は原理的に検出できない、という問題がある。特に投光器設置高さは高々1m程度なので、一般の大人の歩行者は検出ができない。また、投光のため赤外投光器が必要であり、その設置のためのコストが高くなってしまう、という問題がある。
【0006】
また、上記の特許文献2に記載の技術では、スリット光を照射して撮像したパターンから障害物の有無を判定するため、壁など表面積の大きいものは検出できるが、スリット光間隔に比べて幅が小さくなる物体(歩行者など)は検出が困難である、という問題がある。また、スリット光を照射するための近赤外投光器が必要であり、その設置のためのコストが高くなる、という問題がある。
【0007】
本発明は、上記の問題点を解決するためになされたもので、簡易な構成で、前方に存在する障害物を精度よく検出することができる障害物検出装置及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0008】
上記の目的を達成するために本発明に係る障害物検出装置は、自車両の前方を照射し、かつ、光が照射される照射領域の高さ方向の上端部及び下端部の少なくとも一方を、前記上端部より下側又は前記下端部より上側に比べて明度が変化するように前方を照射する照明手段と、前記照明手段の照明位置と高さ方向の位置が異なるように設置され、かつ、自車両の前方を撮像する撮像手段と、前記撮像手段によって撮像された画像から、前記高さ方向の輝度変化に基づいて、前記上端部及び前記下端部の少なくとも一方を表わす明度変化領域を検出する明度変化領域検出手段と、前記明度変化領域検出手段によって検出された前記明度変化領域の高さ方向の幅に基づいて、自車両の前方に存在する障害物を検出する障害物検出手段と、を含んで構成されている。
【0009】
本発明に係るプログラムは、コンピュータを、自車両の前方を照射し、かつ、光が照射される照射領域の高さ方向の上端部及び下端部の少なくとも一方を、前記上端部より下側又は前記下端部より上側に比べて明度が変化するように前方を照射する照明手段の照明位置と高さ方向の位置が異なるように設置され、かつ、自車両の前方を撮像する撮像手段によって撮像された画像から、前記高さ方向の輝度変化に基づいて、前記上端部及び前記下端部の少なくとも一方を表わす明度変化領域を検出する明度変化領域検出手段、及び前記明度変化領域検出手段によって検出された前記明度変化領域の高さ方向の幅に基づいて、自車両の前方に存在する障害物を検出する障害物検出手段として機能させるためのプログラムである。
【0010】
本発明によれば、照明手段によって、光が照射される照射領域の高さ方向の上端部及び下端部の少なくとも一方を、前記上端部より下側又は前記下端部より上側に比べて明度が変化するように前方を照射する。撮像手段によって、前記照明手段の照明位置と高さ方向の位置が異なるように設置され、かつ、自車両の前方を撮像する。
【0011】
そして、明度変化領域検出手段によって、前記撮像手段によって撮像された画像から、前記高さ方向の輝度変化に基づいて、前記上端部及び前記下端部の少なくとも一方を表わす明度変化領域を検出する。障害物検出手段によって、前記明度変化領域検出手段によって検出された前記明度変化領域の高さ方向の幅に基づいて、自車両の前方に存在する障害物を検出する。
【0012】
このように、撮像した画像における、照明手段による照射領域の上端部又は下端部の明度変化領域の高さ方向の幅に基づいて、自車両の前方に存在する障害物を検出することにより、簡易な構成で、前方に存在する障害物を精度よく検出することができる。
【0013】
本発明に係る障害物検出手段は、前記明度変化領域検出手段によって検出された前記明度変化領域の高さ方向の幅が、障害物が存在しない場合における前記明度変化領域の高さ方向の幅より小さい所定幅となる領域を、前記障害物が存在する領域として検出するようにすることができる。
【0014】
本発明に係る障害物検出装置は、前記障害物検出手段によって検出された障害物が存在する領域における前記明度変化領域の高さ方向の上端及び下端の何れか一方の位置に基づいて、前記障害物までの距離を推定する距離推定手段を更に含むようにすることができる。また、上記の障害物検出装置は、前記距離推定手段によって推定された前記障害物までの距離、及び前記障害物の左右方向の位置に基づいて、前記障害物との衝突危険性を判定する衝突判定手段を更に含むようにすることができる。
【発明の効果】
【0015】
以上説明したように、本発明の障害物検出装置及びプログラムによれば、撮像した画像における、照明手段による照射領域の上端部又は下端部の明度変化領域の高さ方向の幅に基づいて、自車両の前方に存在する障害物を検出することにより、簡易な構成で、前方に存在する障害物を精度よく検出することができる、という効果が得られる。
【図面の簡単な説明】
【0016】
【図1】本発明の第1の実施の形態に係る障害物検出装置の構成を示す概略図である。
【図2】前照灯投光装置及び撮像装置の配置を示す図である。
【図3】カットラインの境界部分を説明するための図である。
【図4】カットラインの境界部分を撮像した画像を示す図である。
【図5】カットライン境界部分の幅により障害物が検出される原理を説明するための図である。
【図6】カットライン境界部分の高さ方向の幅を求める様子を示す図である。
【図7】障害物までの距離を推定する方法を説明するための図である。
【図8】カットライン境界部分の角度を計算する方法を説明するための図である。
【図9】(A)画像上の障害物の位置を示す図、及び(B)走行平面上の障害物の位置を示す図である。
【図10】本発明の第1の実施の形態に係る障害物検出装置のコンピュータにおける障害物検出処理ルーチンの内容を示すフローチャートである。
【図11】本発明の第2の実施の形態に係る障害物検出装置の構成を示す概略図である。
【図12】右折時に検出範囲を右側へ拡大する様子を示す図である。
【発明を実施するための形態】
【0017】
以下、図面を参照して本発明の実施の形態を詳細に説明する。なお、車両に搭載され、障害物との衝突危険性がある場合に警報出力を行なう障害物検出装置に本発明を適用した場合を例に説明する。
【0018】
図1に示すように、第1の実施の形態に係る障害物検出装置10は、車両(図示省略)に取り付けられ、かつ、車両の前方を撮像して画像を生成する撮像装置12と、撮像装置12及から得られる撮像画像に基づいて、障害物を検出すると共に、障害物との衝突危険性がある場合に出力部16により警報を出力するコンピュータ14と、出力部16とを備えている。
【0019】
また、障害物検出装置10を搭載している車両には、図2に示すように、自車両前方を照射する前照灯投光装置18が設けられている。
【0020】
前照灯投光装置18には、ロービームユニットとハイビームユニットが搭載されており、それぞれのユニットはハロゲンランプもしくは白色LEDランプにより構成されている。ロービームユニットとハイビームユニットには、前照灯投光装置18を制御する投光制御装置(図示省略)と電源(図示省略)とが接続されている。そして、投光制御装置には、車室内に設けられた点灯スイッチ(図示省略)とHI/LO切換スイッチ(図示省略)が接続されている。投光制御装置は、HI/LO切換スイッチがLO側に操作された状態ではロービームユニットを点灯させ、HI側ではハイビームユニットを点灯させる。
【0021】
前照灯投光装置18は、光の照射領域の上端部である帯状のカットライン境界部分に、照射領域の中央部に対して明暗変化を付加した前照灯により、自車両の前方の走行環境を照明する。なお、カットライン境界部分が、明度変化領域の一例である。
【0022】
前照灯投光装置18による照射領域の上端部のカットライン境界部分は、未照射領域から照射領域まで連続的に明るさを変化させるようにしてもよいし、図3に示すように、未照射領域と照射領域の中間の明度となるように設定されていてもよい。また、前照灯投光装置18において、カットライン境界部分に対応させてフィルタを付加することにより、カットライン境界部分の明るさを設定するようにしてもよい。
【0023】
上記図2に示すように、車室内リアビューミラー位置に、撮像装置12が設置されていて、図4に示すような前照灯投光装置18で照明された前方走行画像を撮像することができる。なお、撮像装置12は、後述するように、前照灯投光装置18による投光位置とは高さ方向の位置が異なるように設置されていればよく、車室内リアビューミラー位置以外の位置に、撮像装置12を設置しても良い。
【0024】
また、撮像装置12は、例えばCCD等の固体撮像素子を使用したCCDカメラ等を使用することができ、CCDカメラで生成されたアナログ信号である画像信号をデジタル信号に変換するA/D変換部(図示省略)、及びA/D変換された画像信号を一時的に格納するための画像メモリ(図示省略)を備えている。
【0025】
コンピュータ14は、障害物検出装置10全体の制御を司るCPU、後述する障害物検出処理ルーチンのプログラム等を記憶した記憶媒体としてのROM、ワークエリアとしてデータを一時格納するRAM、及びこれらを接続するバスを含んで構成されている。このような構成の場合には、各構成要素の機能を実現するためのプログラムをROMに記憶しておき、これをCPUが実行することによって、各機能が実現されるようにする。
【0026】
このコンピュータ14をハードウエアとソフトウエアとに基づいて定まる機能実現手段毎に分割した機能ブロックで説明すると、上記図1に示すように、撮像装置12によって撮像された画像から、カットライン境界部分を検出するカットライン検出部20、検出されたカットライン境界部分に基づいて、障害物の有無を検出する障害物検出部22、および検出された障害物との衝突危険性がある場合に出力部16により警報を出力するように制御する警報制御部24とを備えている。なお、障害物検出部22が、障害物検出手段及び距離推定手段の一例であり、警報制御部24が、衝突判定手段の一例である。
【0027】
ここで、本実施の形態に係る障害物を検出する原理について説明する。
【0028】
まず、図5に示す撮像装置12と前照灯投光装置18の配置を想定する。カメラ光軸が水平になるように撮像装置12を取り付け、投光されるカットライン境界部分がやや下向きに投光されるように前照灯投光装置18を取り付ける。
【0029】
障害物上に投光されたカットライン境界部分について、カメラ撮像面上に投影された高さ方向の幅Δiyは、以下の(1)式で計算できる。
【0030】
【数1】
【0031】
ただし、fは焦点距離であり、Zは前照灯投光装置18から障害物までの距離である。φ2uは、水平方向に対する、前照灯投光装置18により投射したカットライン境界部分の上端の方向の角度であり、φ2dは、水平方向に対する、前照灯投光装置18により投射したカットライン境界部分の下端の方向の角度である。h2は、撮像装置12と前照灯投光装置18との前後方向の間隔である。
【0032】
次に、路面上に投光されたカットライン境界部分について、カメラ撮像面上に投影された高さ方向の幅Δiy’は、以下の(2)式で計算できる。このとき、路面は平面と仮定している。
【0033】
【数2】
【0034】
ただし、h1は、撮像装置12と前照灯投光装置18との高さ方向の間隔であり、h0は、前照灯投光装置18の路面からの高さである。
【0035】
上記(1)式と(2)式により、ΔiyとΔiy’は距離Zに関らずほぼ一定の値になり、Δiy≦Δiy’となることが分かる。例えば、h0=0.5[m]、h1=0.7[m]、h2=1.5[m]、φ2u=1[deg]、φ2d=3[deg]の場合、Δiy:Δiy’≒1:2となり、カットライン境界部分の高さ方向の幅により、障害物上に投光されたカットライン境界部分と、路面上に投光されたカットライン境界部分とは明らかに区別することができる。
【0036】
そこで、本実施の形態では、カットライン検出部20によって、撮像装置12によって撮像された画像について、高さ方向の輝度変化に基づいて、カットライン境界部分のエッジを検出する。例えば、画像を縦方向にスキャンして、画像の輝度を微分してエッジを検出する。カットライン検出部20では、照射領域のカットライン境界部分のエッジ対が検出される。
【0037】
障害物検出部22は、図6に示すように、検出されたカットライン境界部分のエッジ対について、高さ方向に探索して高さ方向の幅を求め、求められた幅に基づいて、前方の障害物の有無を検出する。前照灯投光装置18と撮像装置12との位置の間隔が近く、障害物が立体的であれば、上述したように、障害物までの距離に関りなく、障害物上に投射されたカットライン境界部分の高さ方向(y軸方向)の間隔はほぼ一定値になる。カットライン境界部分のエッジ対から、高さ方向の幅が予め設定された幅の範囲内となるエッジ対を、障害物候補として検出し、検出された障害物候補のエッジ対を、画像上の距離の近さでグルーピングする。グルーピングされた障害物候補の大きさが、自車進路上に存在する歩行者程度の大きさを含む所定範囲の大きさであれば、グルーピングされた障害物候補を含む範囲を、障害物領域として検出する。なお、予め設定される幅の範囲は、上記(1)式を用いて得られる幅に基づいて求めればよく、障害物が存在しない場合におけるカットライン境界部分の高さ方向の幅より小さい値となる。
【0038】
障害物検出部22は、検出された障害物領域の代表的な位置について、図7に示すように、以下の(3)式に従って障害物までの距離Zを推定する。
【0039】
【数3】
【0040】
ただし、φ1は、水平方向に対する、撮像装置12で検出したカットライン境界部分の上端の方向の角度であり、φ2は、水平方向に対する、前照灯投光装置18で投射したカットライン境界部分の上端の方向の角度である。
【0041】
なお、図8に示すように、画像を高さ方向(y方向)に探索して検出した輝度変化点(エッジ)の座標iyから、角度φは以下の(4)式で求めることができる。このとき、fは画素で換算した焦点距離であり、撮像装置12は水平に設置して、画像中心が原点であると仮定する。
【0042】
【数4】
【0043】
障害物検出部22は、検出された障害物領域の代表的な位置のエッジ対の上側のエッジ座標iyを用いて、上記(4)式に従って、水平方向に対する、撮像装置12で検出したカットライン境界部分の上端の方向の角度φ1を算出し、上記(3)式に従って、障害物までの距離Zを推定する。
【0044】
障害物検出部22は、さらに、検出された障害物領域の代表的な位置における、画像上の左右方向の位置x(図9(A)参照)と、推定された障害物までの距離Zとに基づいて、以下の(5)式により、走行平面上のX座標値(自車位置を原点とする座標系)を推定する(図9(B)参照)。
【0045】
【数5】
【0046】
警報制御部24は、推定された障害物までの距離Zと障害物のX座標値とに基づいて、障害物との衝突危険性があるか否かを判定する。例えば、障害物までの距離Zが設定距離以下で、自車の進路上にあれば(|X|<W/2)、障害物が進路上にあって衝突危険性があると判定する。ただし、Wは、自車両の車幅である。
【0047】
警報制御部24は、障害物との衝突危険性があると判定すると、出力部16により、ドライバに対して警報を出力するように制御する。
【0048】
ここで、撮像装置12の設置位置に関して説明する。
【0049】
撮像装置12と前照灯投光装置18の間の間隔が狭い場合は、上記(1)式と(2)式にh1=h2=0を代入した場合に相当する。この場合、上記(1)式と(2)式より、Δiy=Δiy’となることがわかり、画像上で検出したカットライン境界部分の幅から障害物かどうかを判定することができなくなる。そこで、本実施の形態では、撮像装置12と前照灯投光装置18の間の距離は離れている必要があり、特に高さ方向の間隔h1を開ける必要がある。通常の前照灯投光装置18の位置に対して、車室内のリアビューミラーの位置に撮像装置12を設置すればよく、h1は0.5m程度であることが望ましい。
【0050】
次に、本実施の形態に係る障害物検出装置10の作用について説明する。障害物検出装置10を搭載した車両の走行中に、撮像装置12によって車両の前方の所定領域が撮像されると、コンピュータ14において、図10に示す障害物検出処理ルーチンが実行される。
【0051】
ステップ100で、撮像装置12で撮像された画像を取得する。次のステップ102において、上記ステップ100で取得した画像から、カットライン境界部分を検出する。ステップ104において、上記ステップ102で検出されたカットライン境界部分を高さ方向に探索し、高さ方向の幅が所定の範囲内となるエッジ対を、障害物候補として検出する。検出された障害物候補のエッジ対をグルーピングして、グルーピングされた障害物候補の大きさが、所定範囲内の大きさであれば、グルーピングされた障害物候補を、障害物領域として検出する。
【0052】
次のステップ106では、上記ステップ104で障害物領域が検出されたか否かを判定する。障害物領域が検出されなかった場合には、上記ステップ100へ戻る。一方、障害物領域が検出された場合には、ステップ108において、障害物領域の代表的な位置について、上記(3)式、(4)式を用いて障害物までの距離を推定する。また、上記(5)式を用いて、障害物が存在する位置のX座標値を推定する。
【0053】
次のステップ110では、上記ステップ108で推定された障害物までの距離及びX座標値に基づいて、障害物との衝突危険性があるか否かを判定する。障害物との衝突危険性がない場合には、上記ステップ100へ戻る。一方、障害物との衝突危険性がある場合には、ステップ112において、警報を出力するように出力部16を制御して、上記ステップ100へ戻る。
【0054】
以上説明したように、第1の実施の形態に係る障害物検出装置によれば、自車両前方を撮像した画像における、前照灯投光装置による照射領域のカットライン境界部分の高さ方向の幅が、所定範囲内であるか否かに基づいて、自車両の前方に存在する障害物を検出することにより、簡易な構成で、前方に存在する障害物を精度よく検出することができる。
【0055】
また、ステレオ視のための複数カメラや、近赤外投光器を使用せずに単眼カメラで前方の障害物を検出することができる。また、単眼移動ステレオ法では停車中は立体物検出ができないが、本実施の形態では停車中でも立体物(障害物)を検出することができる。
【0056】
また、スリット光を斜め下方へ投光して、カメラで撮像したスリット光の投射パターンから障害物を検出する従来方法では、比較的近傍の障害物しか検出できない、ピッチングや路面勾配により地面を障害物と誤検出する、という問題点があった。本実施の形態では、前照灯の明暗境界部分(カットライン境界部分)に着目し、カットライン境界部分の明るさの変化を特徴として検出することにより、立体障害物上に投射されたカットライン境界部分をロバストに検出することができる。スリット光の方式のように立体物の手がかりとして路面に対する投射パターンを利用しないため、ピッチングや路面勾配変化にもロバストになる。また、スリット光に比べて、前照灯のカットラインの方が明瞭でありカメラで検出しやすいので、遠方の立体障害物を検出することができる。
【0057】
次に、第2の実施の形態について説明する。なお、第1の実施の形態と同様の構成となる部分については、同一符号を付して説明を省略する。
【0058】
第2の実施の形態では、照明をオンオフさせたときの画像の差分画像から、カットライン境界部分を検出している点が、第1の実施の形態と異なっている。
【0059】
図11に示すように、第2の実施の形態に係る障害物検出装置210のコンピュータ214は、画像取得部216、投光制御部218、カットライン検出部220、障害物検出部22、及び警報制御部24を備えている。
【0060】
投光制御部218は、前照灯投光装置18のロービームユニットを瞬間的にOFF/ONすると共に、OFF/ONの同期信号を画像取得部216へ出力する。
【0061】
画像取得部216は、同期信号に基づいて、前照灯投光装置18のロービームのOFF/ONに同期して撮像された2枚の画像(消灯時の画像と照明時の画像)を撮像装置12から取得する。
【0062】
カットライン検出部220は、画像取得部216によって取得した2枚の画像の差分画像を計算し、差分画像から、高さ方向の輝度変化に基づいて、カットライン境界部分のエッジ対を検出する。
【0063】
なお、第2の実施の形態に係る障害物検出装置の他の構成及び作用については、第1の実施の形態と同様のであるため、説明を省略する。
【0064】
このように、第2の実施の形態に係る障害物検出装置によれば、照明オンオフ時の画像の差分画像を計算するため、カットライン境界部分のエッジを適切な閾値によりロバストに検出できる。
【0065】
なお、上記の第1の実施の形態及び第2の実施の形態では、前照灯投光装置が投射するカットライン境界部分の角度幅が一定である場合を例に説明したが、これに限定されるものではない。例えば、前照灯投光装置が投射するカットライン境界部分の角度幅を、周期的あるいはランダムに変化させるようにしてもよい。そのときの画像を撮像して障害物を検出することにより、よりロバストに立体障害物を検出することができる。これは、前記(1)式と(2)式により、カットライン境界部分の角度幅に関わらずΔiyとΔiy’はほぼ一定の値となり、障害物上に投光されたカットライン境界部分と、路面上に投光されたカットライン境界部分とは明らかに区別できるためである。
【0066】
また、前照灯投光装置によるヘッドライト光の上端部であるカットラインを使用して障害物を検出する場合を例に説明したが、ヘッドライト光の下端部であるカットライン境界部分を検出して、車体に近接した小物体(かがんだ子供など)を検出するようにしてもよい。
【0067】
また、車両に搭載されたナビゲーションシステムと連携して、図12に示すように、交差点を右折する場合に、右側へ検出範囲を拡大して、障害物の検出処理を行うようにしてもよい。また、ナビ情報と連携して、交差点を右左折する場合に限定して、障害物の検出処理を行うようにしてもよい。
【0068】
また、レーザレーダやミリ波レーダ等のセンサを利用して獲得した距離情報を更に用いて、障害物を検出することにより、より高い信頼度で障害物を検出するようにしてもよい。
【0069】
また、本実施の形態の障害物検出装置の各部をコンピュータで実現した場合を例に説明したが、これに限定されるものではなく、各部の機能を実現する複数のコンピュータ、または1つまたは複数の電子回路で構成するようにしてもよい。
【0070】
また、本願明細書中において、プログラムが予めインストールされている実施形態として説明したが、当該プログラムをCDROM等の記憶媒体に格納して提供することも可能である。
【符号の説明】
【0071】
10、210 障害物検出装置
12 撮像装置
14、214 コンピュータ
18 前照灯投光装置
20、220 カットライン検出部
22 障害物検出部
24 警報制御部
216 画像取得部
218 投光制御部
【特許請求の範囲】
【請求項1】
自車両の前方を照射し、かつ、光が照射される照射領域の高さ方向の上端部及び下端部の少なくとも一方を、前記上端部より下側又は前記下端部より上側に比べて明度が変化するように前方を照射する照明手段と、
前記照明手段の照明位置と高さ方向の位置が異なるように設置され、かつ、自車両の前方を撮像する撮像手段と、
前記撮像手段によって撮像された画像から、前記高さ方向の輝度変化に基づいて、前記上端部及び前記下端部の少なくとも一方を表わす明度変化領域を検出する明度変化領域検出手段と、
前記明度変化領域検出手段によって検出された前記明度変化領域の高さ方向の幅に基づいて、自車両の前方に存在する障害物を検出する障害物検出手段と、
を含む障害物検出装置。
【請求項2】
前記障害物検出手段は、前記明度変化領域検出手段によって検出された前記明度変化領域の高さ方向の幅が、障害物が存在しない場合における前記明度変化領域の高さ方向の幅より小さい所定幅となる領域を、前記障害物が存在する領域として検出する請求項1記載の障害物検出装置。
【請求項3】
前記障害物検出手段によって検出された障害物が存在する領域における前記明度変化領域の高さ方向の上端及び下端の何れか一方の位置に基づいて、前記障害物までの距離を推定する距離推定手段を更に含む請求項1又は2記載の障害物検出装置。
【請求項4】
前記距離推定手段によって推定された前記障害物までの距離、及び前記障害物の左右方向の位置に基づいて、前記障害物との衝突危険性を判定する衝突判定手段を更に含む請求項3記載の障害物検出装置。
【請求項5】
コンピュータを、
自車両の前方を照射し、かつ、光が照射される照射領域の高さ方向の上端部及び下端部の少なくとも一方を、前記上端部より下側又は前記下端部より上側に比べて明度が変化するように前方を照射する照明手段の照明位置と高さ方向の位置が異なるように設置され、かつ、自車両の前方を撮像する撮像手段によって撮像された画像から、前記高さ方向の輝度変化に基づいて、前記上端部及び前記下端部の少なくとも一方を表わす明度変化領域を検出する明度変化領域検出手段、及び
前記明度変化領域検出手段によって検出された前記明度変化領域の高さ方向の幅に基づいて、自車両の前方に存在する障害物を検出する障害物検出手段
として機能させるためのプログラム。
【請求項1】
自車両の前方を照射し、かつ、光が照射される照射領域の高さ方向の上端部及び下端部の少なくとも一方を、前記上端部より下側又は前記下端部より上側に比べて明度が変化するように前方を照射する照明手段と、
前記照明手段の照明位置と高さ方向の位置が異なるように設置され、かつ、自車両の前方を撮像する撮像手段と、
前記撮像手段によって撮像された画像から、前記高さ方向の輝度変化に基づいて、前記上端部及び前記下端部の少なくとも一方を表わす明度変化領域を検出する明度変化領域検出手段と、
前記明度変化領域検出手段によって検出された前記明度変化領域の高さ方向の幅に基づいて、自車両の前方に存在する障害物を検出する障害物検出手段と、
を含む障害物検出装置。
【請求項2】
前記障害物検出手段は、前記明度変化領域検出手段によって検出された前記明度変化領域の高さ方向の幅が、障害物が存在しない場合における前記明度変化領域の高さ方向の幅より小さい所定幅となる領域を、前記障害物が存在する領域として検出する請求項1記載の障害物検出装置。
【請求項3】
前記障害物検出手段によって検出された障害物が存在する領域における前記明度変化領域の高さ方向の上端及び下端の何れか一方の位置に基づいて、前記障害物までの距離を推定する距離推定手段を更に含む請求項1又は2記載の障害物検出装置。
【請求項4】
前記距離推定手段によって推定された前記障害物までの距離、及び前記障害物の左右方向の位置に基づいて、前記障害物との衝突危険性を判定する衝突判定手段を更に含む請求項3記載の障害物検出装置。
【請求項5】
コンピュータを、
自車両の前方を照射し、かつ、光が照射される照射領域の高さ方向の上端部及び下端部の少なくとも一方を、前記上端部より下側又は前記下端部より上側に比べて明度が変化するように前方を照射する照明手段の照明位置と高さ方向の位置が異なるように設置され、かつ、自車両の前方を撮像する撮像手段によって撮像された画像から、前記高さ方向の輝度変化に基づいて、前記上端部及び前記下端部の少なくとも一方を表わす明度変化領域を検出する明度変化領域検出手段、及び
前記明度変化領域検出手段によって検出された前記明度変化領域の高さ方向の幅に基づいて、自車両の前方に存在する障害物を検出する障害物検出手段
として機能させるためのプログラム。
【図1】

【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図12】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図12】
【公開番号】特開2013−101432(P2013−101432A)
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願番号】特願2011−243727(P2011−243727)
【出願日】平成23年11月7日(2011.11.7)
【出願人】(000003609)株式会社豊田中央研究所 (4,200)
【Fターム(参考)】
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願日】平成23年11月7日(2011.11.7)
【出願人】(000003609)株式会社豊田中央研究所 (4,200)
【Fターム(参考)】
[ Back to top ]