
障害物検出装置
【課題】他の車両の装備に依存せず、自車両の走行の障害となる可能性のある障害物を適切に検出することができる障害物検出装置を提供する。
【解決手段】方位分解能の高いFMCWモードでの物体検知により直視物体が検知された場合に、直視物体の背後の物体背後領域を含むパルス検知領域を設定し、このパルス検知領域を対象として距離分解能の高いパルスモードでの物体検知を行う。
【解決手段】方位分解能の高いFMCWモードでの物体検知により直視物体が検知された場合に、直視物体の背後の物体背後領域を含むパルス検知領域を設定し、このパルス検知領域を対象として距離分解能の高いパルスモードでの物体検知を行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、レーダを用いて車両の走行の障害となる可能性のある障害物を検出する障害物検出装置に関する。
【背景技術】
【0002】
従来、車両の車線変更などにおける安全性を確保するための技術として、例えば特許文献1に記載されたものが知られている。この特許文献1に記載の技術では、例えばドライバによる方向指示器の操作などから車線変更の意志を判定し、互いに近い位置を走行している車両間の接近状態と合わせて、これらの車両同士で車車間通信(車両同士間の通信)により車線変更が行われる旨の情報を送受信することで、車両走行の障害となる可能性を精度良く判断し、必要な場合に警告を与えてドライバに注意を促すようにしている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−320536号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載されている従来の技術では、他の車両が自車の走行の障害となるものであるか否かを精度良く判断するためには、各車両が車車間通信を行うための端末を搭載している必要がある。つまり、自車に近い位置を走行している他の車両が車車間通信を行うための端末を搭載していなければ、この車両が自車の走行の妨げとなる車両であるかどうかを精度良く判断できない、といった問題がある。
【0005】
本発明は、以上のような従来技術の問題点を解消すべく創案されたものであって、他の車両の装備に依存せず、自車両の走行の障害となる可能性のある障害物を適切に検出することができる障害物検出装置を提供することを目的としている。
【課題を解決するための手段】
【0006】
本発明に係る障害物検出装置は、レーダを用いて車両の走行の障害となる障害物を検出するものであり、周波数変調した連続波の電磁波を用いて物体を検知するFMCWレーダ部と、パルス変調した電磁波を用いて物体を検知するパルスレーダ部とを備え、FMCWレーダ部により物体を検知した場合にパルスレーダ部による物体検知を行うことで、車両の走行の障害となる可能性のある障害物を検出する。
【発明の効果】
【0007】
本発明に係る障害物検出装置によれば、方位分解能が高いFMCWレーダ部で物体が検知された場合に距離分解能が高いパルスレーダ部で物体検知を行うことで、例えばFMCWレーダ部で検知された車両の背後に隠れる他の車両を、電磁波の路面反射を利用して、距離分解能の高いパルスレーダ部で高精度に分離検知することが可能となり、車両の走行の障害となる可能性のある障害物を適切に検出することができる。
【図面の簡単な説明】
【0008】
【図1】本発明を適用した障害物検出装置の一例を示す構成図である。
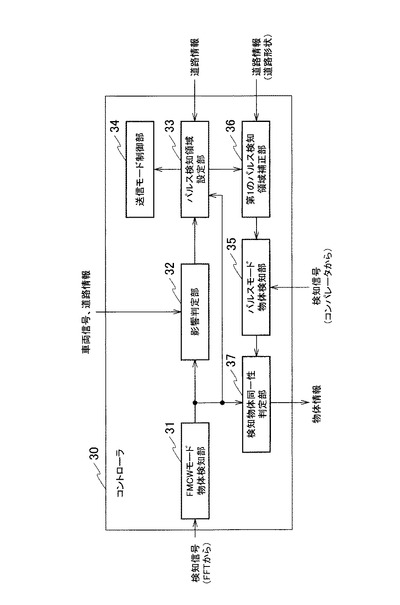
【図2】第1の実施形態の障害物検出装置において、コントローラにより実現する機能をブロック化して示す機能ブロック図である。
【図3】パルス検知領域の設定方法の一例を説明する模式図である。
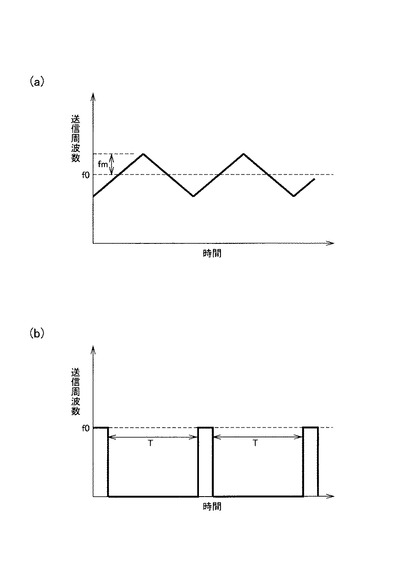
【図4】電波信号の周波数の時間変化を示す図であり、(a)はFMCWモードの場合の電波信号、(b)はパルスモードの場合の電波信号をそれぞれ示している。
【図5】電波の路面反射により直視物体の背後の背後物体を検知可能であることを示す模式図である。
【図6】第1の実施形態の障害物検出装置において、コントローラにより所定周期ごとに繰り返し実行される障害物検出処理の流れを示すフローチャートである。
【図7】第2の実施形態の障害物検出装置において、コントローラにより実現する機能をブロック化して示す機能ブロック図である。
【図8】道路形状に応じてパルス検知領域を補正する方法の一例を説明する模式図である。
【図9】道路形状に応じてパルス検知領域を補正する方法の他の例を説明する模式図である。
【図10】第2の実施形態の障害物検出装置において、コントローラにより所定周期ごとに繰り返し実行される障害物検出処理の流れを示すフローチャートである。
【図11】第3の実施形態の障害物検出装置において、コントローラにより実現する機能をブロック化して示す機能ブロック図である。
【図12】パルス検知領域内に遮断物体が存在する場合にパルス検知領域を補正する方法の一例を説明する模式図である。
【図13】第3の実施形態の障害物検出装置において、コントローラにより所定周期ごとに繰り返し実行される障害物検出処理の流れを示すフローチャートである。
【図14】第4の実施形態の障害物検出装置において、コントローラにより実現する機能をブロック化して示す機能ブロック図である。
【図15】パルス検知領域の近傍に他の直視物体が存在する場合にパルス検知領域を補正する方法の一例を説明する模式図である。
【図16】第4の実施形態の障害物検出装置において、コントローラにより所定周期ごとに繰り返し実行される障害物検出処理の流れを示すフローチャートである。
【図17】自車が交差点に進入しようとしているシーンでのパルス検知領域の設定要否を判定する方法を説明する模式図である。
【図18】第6の実施形態の障害物検出装置において、コントローラにより実現する機能をブロック化して示す機能ブロック図である。
【図19】路面反射により背後物体を検知するための電波の下向き角度を説明する模式図である。
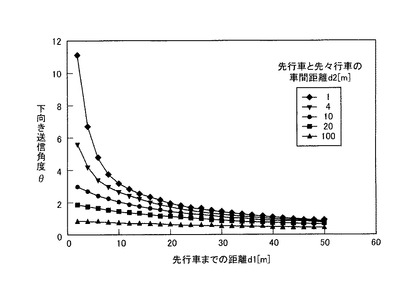
【図20】直視物体までの距離d1と、直視物体と背後物体との間の距離d2と、電波の下向き照射角度θとの関係の一例を示すグラフ図である。
【図21】第6の実施形態の障害物検出装置において、コントローラにより所定周期ごとに繰り返し実行される障害物検出処理の流れを示すフローチャートである。
【発明を実施するための形態】
【0009】
本発明に係る障害物検出装置は、レーダを用いて車両(障害物検出装置を搭載した車両であり、以下、自車という。)の走行の障害となる障害物を検出するものである。車両用として用いられるレーダの方式としては、主に、周波数変調した連続波の電磁波を用いて物体を検知するFMCWレーダと、パルス変調した電磁波を用いて物体を検知するパルスレーダが知られているが、これらの方式を比較すると、FMCWレーダは、例えばDBF(digital Beam Forming)やMUSIC(Multiple Signal Classification)アルゴリズムなどを用いることで高い方位分解能が得られるが、距離分解能の点では劣るという特性があり、逆に、パルスレーダは、方位分解能は低い反面、高い距離分解能が得られるという特性がある。本発明に係る障害物検出装置は、これら2つの方式の特性を利用して高精度な障害物検知を行えるようにしたものであり、FMCW方式で物体検知を行うFMCWレーダ部と、パルス方式で物体検知を行うパルスレーダ部とを備え、FMCWレーダ部により物体を検知した場合にパルスレーダ部による物体検知を行うことで、自車の走行の障害となる可能性のある障害物を検出することを基本とする。
【0010】
自車の周辺の障害物を検出する手法としては、例えば車載カメラで撮影した画像を解析して障害物となる他車両などの物体を検出する手法なども多く用いられている。しかしながら、この手法では、車載カメラで直視できる物体の背後に隠れる他車両などの物体は検知できないという問題がある。この背後に隠れる物体は、例えば、自車が車線変更する際に同じ車線に車線変更することも考えられるため、自車の走行の安全性を確保するためには検知しておくことが望まれる物体である。特許文献1に記載される従来技術では、車車間通信を利用した車両同士の情報共有により、以上のような背後に隠れる他の車両などの影響も認識できるようにしているが、これを実現するためには全ての車両が車車間通信を行う端末を搭載している必要があり、現実的でない。そこで、本発明では、以上のように特性の異なる2つの方式のレーダを、それぞれの方式の特性を活かせるように効果的に利用することによって、背後に隠れる他車両などの物体を含め、自車の走行に影響を及ぼす可能性のある障害物を検出できるようにしている。
【0011】
レーダを用いた障害物検出の利点として、自車から出射した電磁波が直接当たる物体(以下、直視物体という。)が車両などの路面との間に隙間を持つ物体である場合に、路面反射を利用して電磁波が直視物体の背後に廻りこみ、直視物体の背後に隠れる物体(以下、背後物体という。)の検知が可能であるという点が挙げられる。つまり、物体検知のための電磁波の伝播路としては1回路面を経由した伝播路も有効であり、この伝播路のデータを利用することで背後物体の検知も可能となる。ただし、FMCWレーダでは、距離分解能が低いために、このような背後物体を直視物体から正確に分離して検知することが難しい。これに対して、パルスレーダは、方位分解能は低いが距離分解能が高いので、検知対象の範囲がある程度絞られれば背後物体を精度良く検知することが可能となる。このような観点から、本発明に係る障害物検出装置では、FMCWレーダ部で比較的広い範囲で直視物体の検知を行い、FMCWレーダ部で直視物体が検知された場合に、この直視物体の背後の領域を含む限定された領域をパルス検知領域として設定し、この限定されたパルス検知領域においてパルスレーダ部での物体検知を行うことで、背後物体を含めて自車の走行の障害となる可能性のある障害物を検出するようにしている。
【0012】
以下、以上のような本発明の技術思想を適用した具体的な実施形態について、図面を参照しながら詳細に説明する。なお、以下の各実施形態では、レーダとして、ミリ波帯周波数の電波を用いて物体検知を行うミリ波レーダを用いることを前提として説明するが、ミリ波レーダ以外のレーダを用いる構成であっても、本発明は有効に適用することができる。
【0013】
[第1の実施形態]
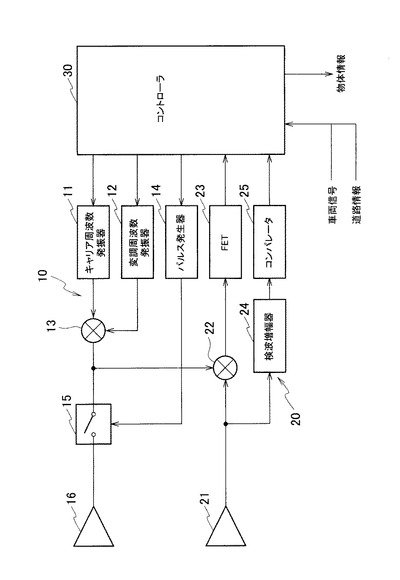
図1は、本発明を適用した車両用の障害物検出装置の一例を示す構成図である。この障害物検出装置は、例えばミリ波帯周波数の電波信号を自車前方或いは後方の所定領域に向けて送信(出射もしくは照射とも言う)する送信部10と、送信部10から送信された電波信号が物体(ターゲット)にて反射されて戻ってきた反射波を受信して検知信号を生成する受信部20と、受信部20で生成された検知信号に基づいて障害物を検出する処理を行うとともに送信部10からの電波信号の送信を制御するコントローラ30とを備える。
【0014】
送信部10には、送信信号のキャリアとなるキャリア周波数(例えば、77.00GHz)を送出するキャリア周波数発振器11と、このキャリアを周波数変調するための変調周波数を送出する変調周波数発振器12と、キャリア周波数発振器11から送出されるキャリアと変調周波数発振器12から送出される変調周波数とをミキシングして、キャリアを周波数変調した電波信号を生成する結合器13と、パルス信号を発生するパルス発生器14と、パルス発生器14からのパルス信号に基づいて、パルス変調した電波信号を生成するパルス変調回路15と、電波信号を送信するための送信アンテナ16とが設けられている。
【0015】
また、受信部20には、反射波を受信して受信信号を出力する受信アンテナ21と、受信アンテナ21からの受信信号と周波数変調した電波信号とをミキシングしてビート信号を生成する結合器22と、ビート信号を高速フーリエ変換により周波数分析して検知信号を出力する高速フーリエ変換部(FFT)23と、受信アンテナ21からの受信信号を検波、増幅して検波信号を出力する検波増幅器24と、検波増幅器24からの検波信号を閾値と比較して検知信号を出力するコンパレータ25とが設けられている。
【0016】
コントローラ30は、受信部20にて生成された検知信号と、自車の動作状態を表す車両信号と、自車が走行している道路に関する道路情報とを入力し、自車の走行に障害となる可能性のある障害物を検出する処理を行うとともに、送信部10から周波数変調した連続波の電波信号を送信させる(FMCWモード)か或いはパルス変調した電波信号を送信させる(パルスモード)かを制御する。なお、車両信号としては、例えばウィンカースイッチ信号や舵角信号などが挙げられ、これらの車両信号は、例えばCANなどの車載ネットワーク経由でコントローラ30に入力される。また、道路情報としては、例えば自車が走行している道路の車線幅、車線数、形状、曲率、車線内自車位置などの情報が挙げられ、これらの道路情報は、自車に搭載されたナビゲーションコントローラなどから車載ネットワーク経由でコントローラ30に入力される。
【0017】
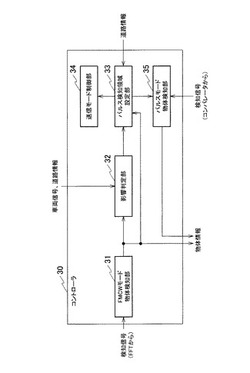
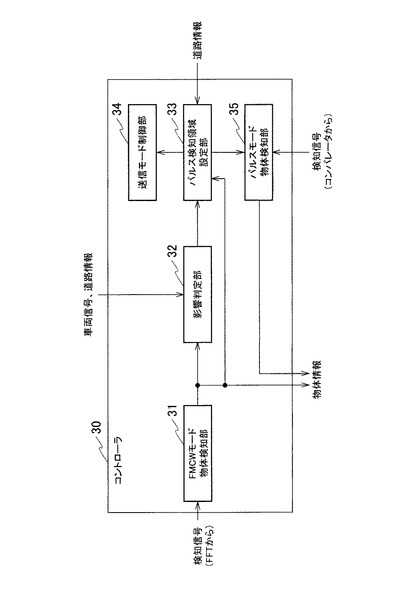
図2は、コントローラ30により実現する機能をブロック化して示す機能ブロック図である。本実施形態の障害物検出装置において、コントローラ30は、図2に示すように、FMCWモード物体検知部31と、影響判定部32と、パルス検知領域設定部33と、送信モード制御部34と、パルスモード物体検知部35の各機能構成を備える。
【0018】
FMCWモード物体検知部31は、送信部10がFMCWモードで動作して周波数変調した連続波の電波信号を送信アンテナ16から送信している状態で、受信部20のFFT23から出力された検知信号に基づいて直視物体の物体検知を行い、自車に対する直視物体の相対位置(距離や方位)を算出して、その情報を物体情報として出力する。
【0019】
影響判定部32は、FMCWモード物体検知部31により直視物体が検知された場合に、FMCWモード物体検知部31から出力された物体情報をもとに、自車から見て直視物体の背後に隠れて影となる領域(以下、物体背後領域という。)を認識し、この物体背後領域が自車の走行に影響を与える可能性があるか否かを、車両信号や道路情報を用いて判定する。具体的な例を挙げて説明すると、影響判定部32は、例えば、道路情報から自車が走行している走行車線や隣接車線を把握し、車両信号として入力されるウィンカースイッチ信号や舵角信号から自車が走行車線から隣接車線へと車線変更しようとしていると判断されるときに、物体背後領域が自車の走行車線または隣接車線と重なっている場合には、物体背後領域が自車の走行に影響を与える可能性があると判定する。影響判定部32は、以上のようにして物体背後領域が自車の走行に影響を与える可能性があると判定した場合、パルス検知領域設定部33に対してパルス検知領域を設定する旨の指令を出力する。
【0020】
パルス検知領域設定部33は、影響判定部32からパルス検知領域の設定指令が出力されると、道路情報やFMCWモード物体検知部31からの物体情報をもとに、物体背後領域を含む限定された領域を、パルスモード物体検知部35で物体検知を行う対象となるパルス検知領域として設定する。そして、パルス検知領域設定部33は、パルス検知領域を設定すると、送信モード制御部34に対してモード制御指令を出力するとともに、パルスモード物体検知部35に対して設定したパルス検知領域の情報を出力する。
【0021】
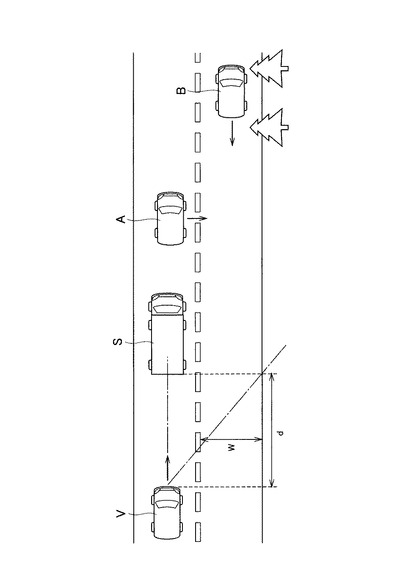
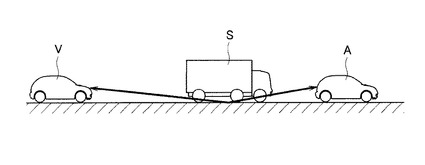
ここで、パルス検知領域設定部33により設定するパルス検知領域の一例について、図3に示すような具体的な走行シーンを例示しながら説明する。この図3に例示する走行シーンは、自車Vの前方の障害物を検出する場合の例であり、自車Vが走行している走行車線の前方を直視物体となる他車両Sが走行しており、この他車両Sの物体背後領域となる走行車線の前方に他車両A、他車両Sの物体背後領域となる隣接車線の前方に他車両Bが存在している走行シーンである。この図3の走行シーンの場合、他車両Sの背後に隠れる物体背後領域は走行車線と隣接車線とに重なっているため、自車Vが走行車線から隣接車線へと車線変更しようとする状況では、この物体背後領域が自車Vの走行に影響を与える可能性がある。つまり、走行車線上の物体背後領域に存在する他車両Aは自車Vと同様に隣接車線に車線変更する可能性があり、また隣接車線上の物体背後領域に存在する他車両Bは自車Vに対する相対速度が低いと車線変更した自車Vに接近してくるため、自車Vの走行に影響を与えることになる。したがって、図3のような走行シーンにおいて、自車Vが走行車線から隣接車線へと車線変更する場合には、自車Vから直視物体である他車両Sまでの距離dと、走行車線および隣接車線の車線幅Wとに基づき、パルス検知領域を例えば以下の条件1および条件2に従って設定する。
条件1:自車Vからパルス検知領域までの距離がd以上
条件2:自車Vの向きを基準として車線変更する隣接車線の方向を正とした場合のパルス検知領域の角度範囲が0〜tan-1(d/1.5W)
【0022】
なお、以上の説明は、自車が直進路である走行車線のほぼ中央を走行していると仮定した場合のパルス検知領域の設定方法の一例であり、パルス検知領域の設定方法としては上記以外にも様々なバリエーションが考えられる。つまり、パルス検知領域は、少なくとも直視物体の背後に隠れる物体背後領域が含まれるように設定されればよく、例えば、FMCWモード物体検知部31により直視物体の大きさを正確に検知でき、物体背後領域の範囲を正確に求められるような場合には、その物体背後領域をパルス検知領域として設定するようにしてもよい。また、本実施形態では、コントローラ30の処理負荷低減等を考慮して、直視物体の背後に隠れる物体背後領域が自車の走行に影響を与える可能性があると判断した場合にのみパルス検知領域を設定してパルスモードでの物体検知を行うようにしているが、物体背後領域が自車の走行に影響を与える可能性があるか否かに関わらず、物体背後領域を含むパルス検知領域を設定してパルスモードでの物体検知を行うようにしてもよい。
【0023】
送信モード制御部34は、送信部10における送信モードを制御するものである。すなわち、送信モード制御部34は、コントローラ30にて実行する障害物検出処理(詳細は後述する)の処理サイクルの初期状態においては、送信部10をFMCWモードで動作させて周波数変調した連続波の電波信号を送信アンテナ16から送信させ、パルス検知領域設定部33からモード制御指令が出力されると、送信部10をパルスモードで動作させてパルス変調した電波信号を送信アンテナ16から送信させる。
【0024】
具体的には、送信モード制御部34は、送信部10をFMCWモードで動作させる際は、変調周波数発振器12を作動させるとともに、パルス変調回路15のスイッチを常時オンさせる指令を出力し、キャリア周波数発振器11からのキャリアを周波数変調した連続波の電波信号を送信アンテナ16から送信させる。ここで、変調周波数発振器12が送出する変調周波数としては、図4(a)に示すように、キャリア周波数f0に対する周波数変調幅fmが例えば100MHz程度の三角波を用いればよい。
【0025】
また、送信モード制御部34は、送信部10をパルスモードで動作させる際は、変調周波数発振器12の作動を停止するとともにパルス発生器14を作動させ、パルス変調回路15のスイッチをパルス発生器14からのパルス信号に応じてオンオフさせることで、キャリア周波数発振器11からのキャリアをパルス変調した電波信号を送信アンテナ16から送信させる。ここで、パルス発生器14が発生するパルス信号としては、図4(b)に示すように、パルスオン期間とオン期間との間に受信待ち時間Tが設定され、この受信待ち時間Tが例えば66μsec程度(検知距離200m程度を想定した場合)となるような信号を用いればよい。
【0026】
なお、以上の説明は、FMCWモードとパルスモードとを時分割で切替える場合を想定して、パルスモード時には一定周波数のキャリアをパルス変調した電波信号を送信させるとしたが、FMCWモードの動作とパルスモードの動作とを同時に行うことも可能である。すなわち、送信モード制御部34が、パルス検知領域設定部33からモード制御信号が出力されたときに、変調周波数発振器12の作動を継続させたままパルス発生器14からパルス信号を出力させるように制御すれば、周波数変調したキャリアをパルス変調した電波信号を出力させることができる。この場合には、パルス検知領域を対象としたパルスモード物体検知部35での物体検知処理と、パルス検知領域以外の領域を対象としたFMCWモード物体検知部31での物体検知処理とを並行して行うことが可能となり、効率的である。
【0027】
パルスモード物体検知部35は、送信部10がパルスモードで動作してパルス変調した電波信号を送信アンテナ16から送信している状態で、受信部20のコンパレータ25から出力された検知信号に基づいて、パルス検知領域設定部33により設定されたパルス検知領域を対象としたパルスモードによる物体検知を行う。そして、パルス検知領域内に他車両などの物体が存在すれば、その物体の自車に対する相対位置(距離や方位)を算出して、その情報を物体情報として出力する。FMCWモード物体検知部31により検知された直視物体が車両などの路面との間に隙間を持つ物体であれば、このパルスモード物体検知部35による物体検知処理により、図5に示すような路面反射を利用して、この直視物体の背後に隠れる背後物体を直視物体から分離して検知することが可能となる。なお、図5は、図3に示した走行シーンにおいて、自車Vから送信される電波が路面反射により自車V前方の直視物体である他車両Sの背後に廻りこむことで、背後物体である他車両Aが検知可能であることを示す模式図である。
【0028】
本実施形態の障害物検出装置は、コントローラ30が以上の各機能構成を備えることで本発明の技術思想を具現化し、自車の走行の障害となる可能性のある障害物を適切に検出できるようにしている。なお、上述した障害物検出装置の構成において、送信部10のキャリア周波数発振器11、変調周波数発振器12、結合器13、送信アンテナ16と、受信部20の受信アンテナ21、結合器22、FFT23と、コントローラ30のFMCWモード物体検知部31とが、本発明の「FMCWレーダ部」に相当する。また、送信部10のキャリア周波数発振器11、パルス発生器14、パルス変調回路15、送信アンテナ16と、受信部20の検波増幅器24、コンパレータ25と、コントローラ30のパルスモード物体検知部35とが、本発明の「パルスレーダ部」に相当する。
【0029】
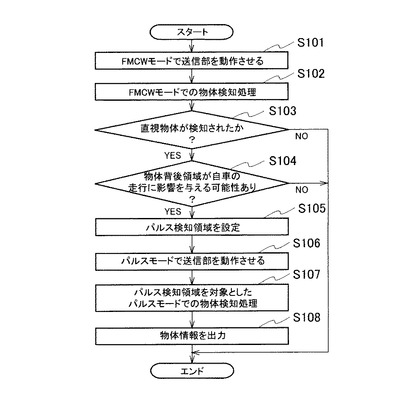
次に、以上のように構成される本実施形態の障害物検出装置の動作について、図6のフローチャートを参照しながら説明する。図6のフローチャートは、コントローラ30により所定周期ごとに繰り返し実行される障害物検出処理の流れを示したものである。
【0030】
図6の処理フローが開始されると、コントローラ30は、まずステップS101において、送信部10をFMCWモードで動作させ、送信アンテナ16からキャリアを周波数変調した連続波の電波信号を、自車前方或いは後方の所定領域(上述したパルス検知領域よりも広い探索領域)に向けて送信させる(送信モード制御部34)。
【0031】
次に、コントローラ30は、ステップS102において、受信部20のFFT23から出力される検知信号に基づいて、FMCWモードでの物体検知を行う(FMCWモード物体検知部31)。そして、ステップS103において、FMCWモードでの物体検知により物体(直視物体)が検知されたかどうかを判定し、直視物体が検知されない場合は今回の処理周期における処理を終了する。一方、FMCWモードでの物体検知により直視物体が検知された場合には、次のステップS104において、このFMCWモードで検知した直視物体の背後の物体背後領域が、自車の走行に影響を与える可能性があるか否かを判定する(影響判定部32)。
【0032】
そして、コントローラ30は、ステップS104での判定の結果、FMCWモードで検知した直視物体の背後の物体背後領域が自車の走行に影響を与える可能性がないと判定した場合は、今回の処理周期における処理を終了する。一方、FMCWモードで検知した直視物体の背後の物体背後領域が自車の走行に影響を与える可能性があると判定した場合には、次のステップS105において、この物体背後領域が含まれるように、パルスモードで物体検知を行うためのパルス検知領域を設定する(パルス検知領域設定部33)。
【0033】
次に、コントローラ30は、ステップS106において、送信部10をパルスモードで動作させ、送信アンテナ16からキャリアをパルス変調した電波信号を、自車前方或いは後方のパルス検知領域を含む所定領域に向けて送信させる(送信モード制御部34)。なお、このとき送信部10が電波信号の送信角度を高精度に制御可能であれば、ステップS105で設定したパルス検知領域のみに対応する角度範囲で電波信号を送信するようにしてもよい。
【0034】
次に、コントローラ30は、ステップS107において、受信部20のコンパレータ25から出力される検知信号に基づき、ステップS105で設定したパルス検知領域を対象として、パルスモードでの物体検知を行う(パルスモード物体検知部35)。そして、ステップS108において、ステップS102のFMCWモードでの物体検知により得られた物体情報と、ステップS107のパルスモードでの物体検知により得られた物体情報とを出力し、今回の処理周期における一連の処理を終了する。
【0035】
以上、具体的な例を挙げながら説明したように、本実施形態の障害物検出装置によれば、方位分解能の高いFMCWモードでの物体検知により直視物体が検知された場合に、直視物体の背後の物体背後領域を含むパルス検知領域を設定し、このパルス検知領域を対象として距離分解能の高いパルスモードでの物体検知を行うようにしているので、直視物体と背後物体とを高精度に分離検知することが可能となり、自車の走行の障害となる可能性のある障害物を適切に検出することができる。
【0036】
また、本実施形態の障害物検出装置によれば、直視物体の背後の物体背後領域が自車の走行に影響を与える可能性があるか否かを判定し、影響があると判断した場合にのみパルス検知領域を設定してパルスモードでの物体検知を行うようにしているので、コントローラ30での処理負荷を低減できるとともに、必要性の高い物体情報のみを抽出して自車のドライバに提示することができる。
【0037】
また、本実施形態の障害物検出装置によれば、自車が走行車線から隣接車線へと車線変更しようとしている場合で、且つ、物体背後領域が自車の走行車線または隣接車線と重なる場合に、物体背後領域が自車の走行に影響を与える可能性があると判断するようにしているので、パルスモードでの物体検知の必要性を的確且つ簡便に判断することができる。
【0038】
また、本実施形態の障害物検出装置によれば、自車が車線変更しようとしている状況でパルス検知領域を設定する場合に、FMCWモードで検知した自車から直視物体までの距離と、道路情報として取得した自車の走行車線および隣接車線の車線幅とに基づいてパルス検知領域を設定するようにしているので、パルス検知領域の設定を的確且つ簡便に行うことができる。
【0039】
[第2の実施形態]
次に、本発明の第2の実施形態について説明する。本実施形態は、自車の走行車線および隣接車線の道路形状に基づいて、第1の実施形態で説明したパルス検知領域を補正するようにした例である。すなわち、第1の実施形態では、自車が直進路で車線変更するシーンを想定してパルス検知領域の設定方法の一例を説明したが、例えば自車がカーブ路の近傍で車線変更する場合などでは、第1の実施形態で説明したパルス検知領域が必ずしも適切とはならない場合もある。そこで、本実施形態では、道路情報として取得される道路形状に基づいて、必要な場合には第1の実施形態で説明したパルス検知領域を補正するようにしている。また、本実施形態では、FMCWモードでの物体検知とパルスモードでの物体検知との双方で同一の物体を検知していると判断される場合には、FMCWモードでの物体検知により得られた物体情報を優先して出力するようにしている。なお、その他の構成および基本的な動作は第1の実施形態と同様であるので、以下の説明では、第1の実施形態と共通若しくは対応する構成要素については同一の符号を用い、第1の実施形態と重複する説明は省略する。
【0040】
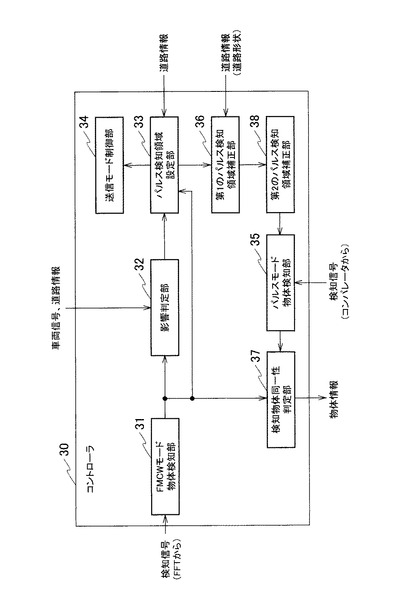
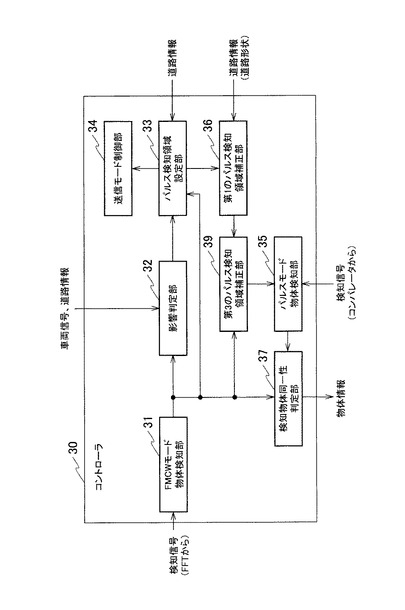
図7は、第2の実施形態の障害物検出装置におけるコントローラ30の機能ブロック図である。本実施形態の障害物検出装置では、図7に示すように、コントローラ30の機能構成として、第1の実施形態で説明した構成に加えて、第1のパルス検知領域補正部36と、検知物体同一性判定部37とが付加されている。
【0041】
第1のパルス検知領域補正部36は、パルス検知領域設定部33によりパルス検知領域が設定された場合に、道路情報として入力される自車の走行車線および隣接車線の道路形状に基づいてパルス検知領域の補正の必要性を判定し、補正の必要ありと判断した場合には、パルス検知領域設定部33により設定したパルス検知領域を補正する。
【0042】
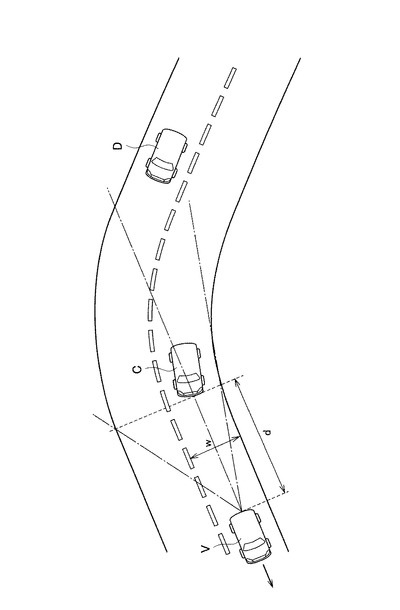
具体的な例を挙げて説明すると、例えば図8に示すように、自車Vが左旋回のカーブ路を越えた直後に走行車線から隣接車線に車線変更しようとしているシーンにおいて、自車Vの走行車線の後方には直視物体となる後続車両Cが走行しており、さらにその後方のカーブの手前では、隣接車線を他車両Dが走行しているものとする。なお、この図8の例は、自車Vの後方の障害物を障害物検出装置で検出する場合の例である。この図8に例示する走行シーンにおいては、第1の実施形態で説明した条件1および条件2に従ってパルス検知領域を設定すると、他車両Dが走行している位置はパルス検知領域から外れることになり、自車Vが車線変更を行う上で障害となる可能性がある他車両Dを適切に検出できなくなる虞がある。そこで、第1のパルス検知領域補正部36は、道路情報として入力される自車の走行車線および隣接車線の道路形状に基づいて、自車が図8のような走行シーンにあると判定した場合には、パルス検知領域設定部33により設定したパルス検知領域を補正する必要があると判断し、例えば第1の実施形態で説明した条件2に代えて、下記の条件3を用いてパルス検知領域を再設定することで、パルス検知領域の補正を行う。
条件3:自車Vの向きを基準として車線変更する隣接車線の方向を正とした場合のパルス検知領域の角度範囲が−tan-1(d/0.5W)〜tan-1(d/1.5W)
【0043】
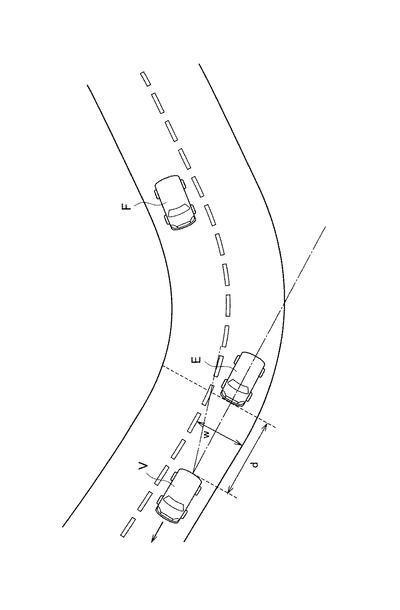
また、例えば図9に示すように、自車Vが右旋回のカーブ路を越えた直後に走行車線から隣接車線に車線変更しようとしているシーンにおいて、自車Vの走行車線の後方に直視物体となる後続車両Eが走行しており、さらにその後方のカーブの手前の隣接車線を他車両Fが走行している場合には、後続車両Eの背後に隠れる物体背後領域が隣接車線と重なることはなく、カーブ手前で隣接車線を走行している他車両Fも直視物体となる。したがって、この図9に例示する走行シーンにおいては、第1の実施形態で説明した条件1および条件2に従ってパルス検知領域を設定すると、不要な領域に対してもパルスモードによる物体検知が行われることになり、効率的でない。そこで、第1のパルス検知領域補正部36は、道路情報として入力される自車の走行車線および隣接車線の道路形状に基づいて、自車が図9のような走行シーンにあると判定した場合には、パルス検知領域設定部33により設定したパルス検知領域を補正する必要があると判断し、例えば第1の実施形態で説明した条件2に代えて、下記の条件4を用いてパルス検知領域を再設定することで、パルス検知領域の補正を行う。
条件4:自車Vの向きを基準として車線変更する隣接車線の方向を正とした場合のパルス検知領域の角度範囲が0〜tan-1(d/0.5W)
【0044】
本実施形態では、以上のように第1のパルス検知領域補正部36によってパルス検知領域が補正された場合、パルスモード物体検知部35は、この補正されたパルス検知領域を対象としてパルスモードによる物体検知処理を行う。
【0045】
検知物体同一性判定部37は、FMCWモード物体検知部31での物体検知処理により得られた物体情報と、パルスモード物体検知部35での物体検知処理により得られた物体情報とのマッチングを行い、重複若しくは近似する物体情報が存在する場合、つまりFMCWモード物体検知部31とパルスモード物体検知部35との双方で検知されていると推定される物体が存在する場合に、この物体に関する物体情報としてFMCWモード物体検知部31で得られたものを選択して出力する。
【0046】
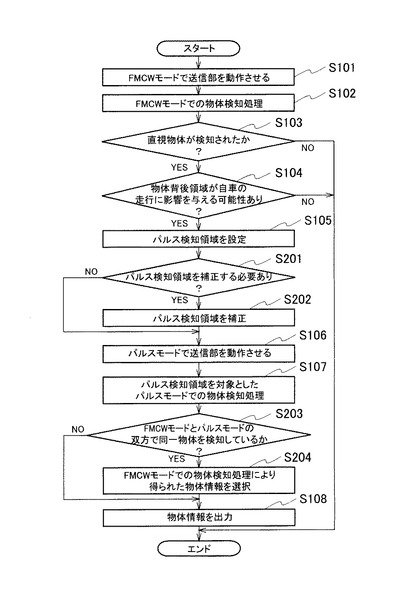
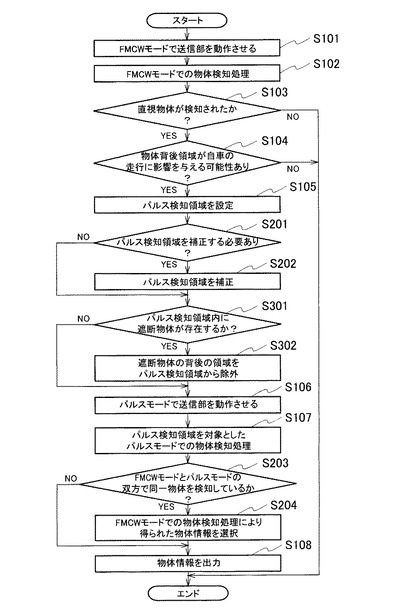
次に、以上のように構成される本実施形態の障害物検出装置の動作について、図10のフローチャートを参照しながら説明する。図10のフローチャートは、本実施形態の障害物検出装置におけるコントローラ30によって所定周期ごとに繰り返し実行される障害物検出処理の流れを示したものであり、図6に示した第1の実施形態での処理に加え、ステップS201〜ステップS204の処理を追加したものである。なお、ステップS101〜ステップS108の処理は第1の実施形態と同様であるため、説明を省略する。
【0047】
本実施形態では、ステップS105においてパルス検知領域を設定した後、コントローラ30が、ステップS201において、道路情報として入力される自車の走行車線および隣接車線の道路形状に基づいて、ステップS105で設定したパルス検知領域を補正する必要があるか否かを判定する。そして、パルス検知領域の補正が必要であると判断した場合は、次のステップS202において、ステップS105で設定したパルス検知領域を例えば上述した手法により補正してステップS106に進む。一方、パルス検知領域の補正が必要ないと判断した場合は、そのままステップS106に進む(第1のパルス検知領域補正部36)。
【0048】
また、本実施形態では、ステップS107においてパルス検知領域を対象としたパルスモードでの物体検知処理を行った後、コントローラ30が、ステップS203において、ステップS102のFMCWモードでの物体検知処理により得られた物体情報と、ステップS107のパルスモードでの物体検知処理により得られた物体情報とのマッチングを行って、FMCWモードとパルスモードの双方で同一物体を検知しているか否かを判定する。そして、FMCWモードとパルスモードの双方で検知している物体があれば、次のステップS204において、当該物体に関する物体情報として、ステップS102のFMCWモードでの物体検知処理により得られた物体情報を選択してステップS108に進む。一方、FMCWモードとパルスモードの双方で検知している物体がない場合には、そのままステップS108に進む(検知物体同一性判定部37)。
【0049】
以上、具体的な例を挙げながら説明したように、本実施形態の障害物検出装置によれば、自車の走行車線および隣接車線の道路形状に基づいてパルス検知領域の補正の要否を判定し、補正の必要ありと判断した場合には、自車の走行シーンに対応するようにパルス検知領域を補正するようにしているので、自車の走行に影響を与える可能性のある障害物をより精度良く検出することが可能になる。
【0050】
また、本実施形態の障害物検出装置によれば、FMCWモードとパルスモードとの双方で同一物体を検知していると判断される場合には、この物体に関する物体情報として、FMCWモードでの物体検知処理により得られた物体情報を優先して出力するようにしているので、自車の走行に影響を与える可能性のある障害物をより精度良く検出することが可能になる。
【0051】
[第3の実施形態]
次に、本発明の第3の実施形態について説明する。本実施形態は、第1の実施形態または第2の実施形態で説明したパルス検知領域内に例えば路側壁などの電波を遮断する物体(以下、遮断物体という。)が存在する場合に、この遮断物体の背後の領域をパルス検知領域から除外するように、パルス検知領域を補正するようにした例である。なお、その他の構成および基本的な動作は第1および第2の実施形態と同様であるので、以下の説明では、第1および第2の実施形態と共通若しくは対応する構成要素については同一の符号を用い、重複する説明は省略する。
【0052】
図11は、第3の実施形態の障害物検出装置におけるコントローラ30の機能ブロック図である。本実施形態の障害物検出装置では、図11に示すように、コントローラ30の機能構成として、第1および第2の実施形態で説明した構成に加えて、第2のパルス検知領域補正部38が付加されている。
【0053】
第2のパルス検知領域補正部38は、パルス検知領域設定部33により設定されたパルス検知領域、或いは第1のパルス検知領域補正部36により補正されたパルス検知領域内に遮断物体が存在するか否かを判断し、遮断物体が存在する場合には、この遮断物体の背後の領域をパルス検知領域から除外するように、パルス検知領域設定部33により設定されたパルス検知領域、或いは第1のパルス検知領域補正部36により補正されたパルス検知領域を補正する。
【0054】
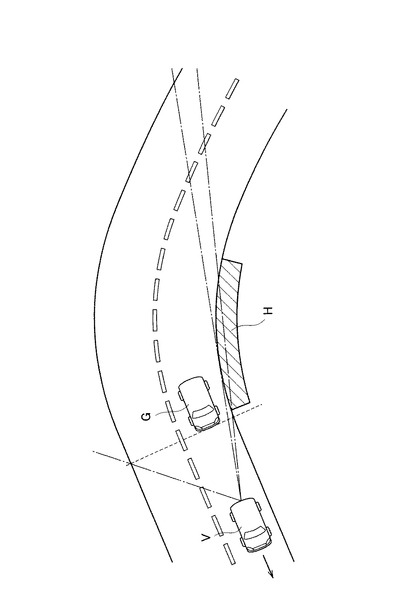
具体的な例を挙げて説明すると、例えば図12に示すように、自車Vが左旋回のカーブ路を越えた直後に走行車線から隣接車線に車線変更しようとしているシーンにおいて、自車Vの走行車線の後方には直視物体となる後続車両Gが走行しており、走行車線の側方には遮断物体となる路側壁Hが存在しているものとする。なお、この図12の例は、自車Vの後方の障害物を障害物検出装置で検出する場合の例である。この図12に例示する走行シーンにおいては、第2の実施形態で説明したように、第1のパルス検知領域補正部36により上述した条件3に基づいてパルス検知領域が再設定されるが、第1のパルス検知領域補正部36により再設定されたパルス検知領域内に遮断物体である路側壁Hが存在し、路側壁Hにより電波が遮断されるため、その背後の領域では物体検知を行うことができない。そこで、第2のパルス検知領域補正部38は、パルス検知領域の角度範囲を遮断物体である路側壁Hと重ならない範囲に限定することで、パルス検知領域を補正する。なお、パルス検知領域内に遮断物体が存在するか否かは、例えば、道路情報に路側壁などの情報が含まれている場合にはその情報を用いて判断するようにしてもよいし、自車が車載カメラを搭載している場合にはその撮影画像を用いて判断してもよい。また、FMCWモードでの物体検知により得られた物体情報から判断することも可能である。
【0055】
次に、以上のように構成される本実施形態の障害物検出装置の動作について、図13のフローチャートを参照しながら説明する。図13のフローチャートは、本実施形態の障害物検出装置におけるコントローラ30によって所定周期ごとに繰り返し実行される障害物検出処理の流れを示したものであり、図10に示した第2の実施形態での処理に加え、ステップS301とステップS302の処理を追加したものである。なお、ステップS101〜ステップS108の処理は第1の実施形態と同様であり、ステップS201〜ステップS204の処理は第2の実施形態と同様であるため、説明を省略する。
【0056】
本実施形態では、ステップS201において道路形状に応じたパルス検知領域の補正が必要であると判断してステップS202でパルス検知領域の補正を行った後、或いはステップS201において道路形状に応じたパルス検知領域の補正は必要ないと判断した後に、コントローラ30が、ステップS301において、パルス検知領域内に遮断物体が存在するか否かを判定する。そして、パルス検知領域内に遮断物体が存在すると判断した場合は、次のステップS302において、遮断物体の背後の領域を除外するようにパルス検知領域を補正してステップS106に進む。一方、パルス検知領域内に遮断物体が存在しないと判断した場合には、そのままステップS106に進む(第2のパルス検知領域補正部38)。
【0057】
以上、具体的な例を挙げながら説明したように、本実施形態の障害物検出装置によれば、パルス検知領域内に例えば路側壁などの電波を遮断する遮断物体が存在するか否かを判定し、パルス検知領域内に遮断物体が存在すると判断した場合には、遮断物体の背後の領域を除外するようにパルス検知領域を補正するようにしているので、パルスモードでの物体検知処理をより効率的に行うことが可能となる。
【0058】
[第4の実施形態]
次に、本発明の第4の実施形態について説明する。本実施形態は、第1の実施形態または第2の実施形態で説明したパルス検知領域の近傍に他の直視物体が存在する場合に、この直視物体が存在する位置がパルス検知領域内に含まれるように、パルス検知領域を補正するようにした例である。なお、その他の構成および基本的な動作は第1および第2の実施形態と同様であるので、以下の説明では、第1および第2の実施形態と共通若しくは対応する構成要素については同一の符号を用い、重複する説明は省略する。
【0059】
図14は、第4の実施形態の障害物検出装置におけるコントローラ30の機能ブロック図である。本実施形態の障害物検出装置では、図14に示すように、コントローラ30の機能構成として、第1および第2の実施形態で説明した構成に加えて、第3のパルス検知領域補正部39が付加されている。
【0060】
第3のパルス検知領域補正部39は、FMCWモード物体検知部31から出力された物体情報を入力し、パルス検知領域設定部33により設定されたパルス検知領域、或いは第1のパルス検知領域補正部36により補正されたパルス検知領域の近傍に、当該パルス検知領域を設定する基準となった直視物体とは異なる他の直視物体が存在するか否かを判定する。そして、パルス検知領域の近傍に他の直視物体が存在する場合には、この直視物体が存在する位置がパルス検知領域内に含まれるように、パルス検知領域設定部33により設定されたパルス検知領域、或いは第1のパルス検知領域補正部36により補正されたパルス検知領域を補正する。
【0061】
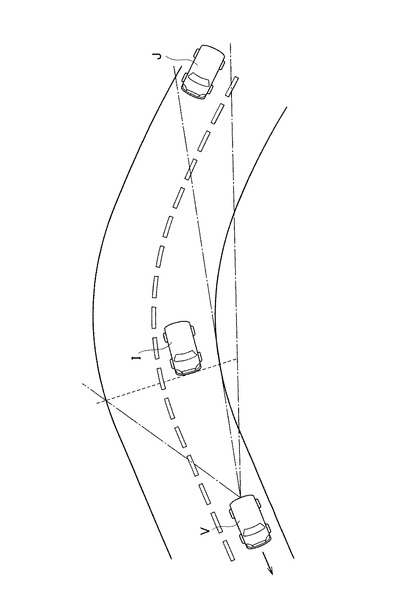
具体的な例を挙げて説明すると、例えば図15に示すように、自車Vが左旋回のカーブ路を越えた直後に走行車線から隣接車線に車線変更しようとしているシーンにおいて、自車Vの走行車線の後方には直視物体となる後続車両Iが走行しており、カーブ手前の自車Vから離れた位置に、他車両Jが隣接車線上を走行しているものとする。なお、この図15の例は、自車Vの後方の障害物を障害物検出装置で検出する場合の例である。この図15に例示する走行シーンにおいては、第2の実施形態で説明したように、第1のパルス検知領域補正部36により上述した条件3に基づいてパルス検知領域が再設定されるが、自車Vから離れた位置の他車両Jが第1のパルス検知領域補正部36により再設定されたパルス検知領域の近傍を走行しており、短時間のうちにパルス検知領域内に入り込むことが予想される。そこで、第3のパルス検知領域補正部39は、FMCWモード物体検知部31から出力された他車両Jに関する物体情報から、この他車両Jの位置がパルス検知領域の近傍であると判断した場合に、パルス検知領域の角度範囲をこの他車両Jの位置が含まれるように拡大することで、パルス検知領域を補正する。これにより、他車両JがFMCWモードで検知されている間にパルスモードでも検知されるようにして、双方のモードで得られる物体情報の関連付けを行うことができ、他車両Jをロストすることなくトラッキングを継続することが可能となる。
【0062】
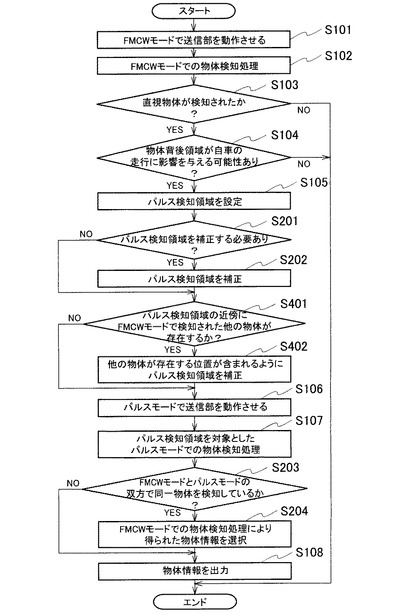
次に、以上のように構成される本実施形態の障害物検出装置の動作について、図16のフローチャートを参照しながら説明する。図16のフローチャートは、本実施形態の障害物検出装置におけるコントローラ30によって所定周期ごとに繰り返し実行される障害物検出処理の流れを示したものであり、図10に示した第2の実施形態での処理に加え、ステップS401とステップS402の処理を追加したものである。なお、ステップS101〜ステップS108の処理は第1の実施形態と同様であり、ステップS201〜ステップS204の処理は第2の実施形態と同様であるため、説明を省略する。
【0063】
本実施形態では、ステップS201において道路形状に応じたパルス検知領域の補正が必要であると判断してステップS202でパルス検知領域の補正を行った後、或いはステップS201において道路形状に応じたパルス検知領域の補正は必要ないと判断した後に、コントローラ30が、ステップS401において、パルス検知領域の近傍にFMCWモードでの物体検知によって検知された他の物体が存在するか否かを判定する。そして、パルス検知領域の近傍に他の物体が存在すると判断した場合は、次のステップS402において、他の物体の位置が含まれるようにパルス検知領域を補正してステップS106に進む。一方、パルス検知領域の近傍に他の物体が存在しないと判断した場合には、そのままステップS106に進む(第3のパルス検知領域補正部39)。
【0064】
以上、具体的な例を挙げながら説明したように、本実施形態の障害物検出装置によれば、パルス検知領域の近傍に当該パルス検知領域を設定する基準となった直視物体とは異なる他の直視物体が存在するか否かを判定し、パルス検知領域の近傍に他の直視物体が存在すると判断した場合には、この直視物体が存在する位置が含まれるようにパルス検知領域を補正するようにしているので、この物体をFMCWモードでの物体検知によりトラッキングしていた場合に、パルスモードでの物体検知に切り替わることでロストするといった不都合を有効に抑制することができる。
【0065】
[第5の実施形態]
次に、本発明の第5の実施形態について説明する。本実施形態は、FMCWモードで検知した直視物体の背後の物体背後領域が自車の走行に影響を与える可能性があるか否かの判定の他の例を示したものである。すなわち、上述の第1乃至第4の実施形態では、自車が車線変更するシーンを想定してコントローラ30の影響判定部32による判定手法の一例を説明したが、本実施形態では、自車が交差点に進入しようとしているシーンでの影響判定部32による判定手法について説明する。なお、障害物検出装置の構成および基本的な動作は上述した各実施形態と同様であるので、以下では、本実施形態の特徴である影響判定部32での判定方法についてのみ説明する。
【0066】
影響判定部32は、第1の実施形態で説明したように、FMCWモード物体検知部31により直視物体が検知された場合に、FMCWモード物体検知部31から出力された物体情報をもとに、この直視物体の物体背後領域を認識して、この物体背後領域が自車の走行に影響を与える可能性があるか否かを判定する。ここで、影響判定部32は、車両信号や道路情報に基づいて自車の走行シーンを推定し、自車が交差点に進入しようとしていると判断した場合には、交差点に繋がる道路の位置と物体背後領域の位置とを比較する。そして、交差点に繋がる道路の位置と物体背後領域の位置とが重なる場合に、物体背後領域が自車の走行に影響を与える可能性があると判断する。
【0067】
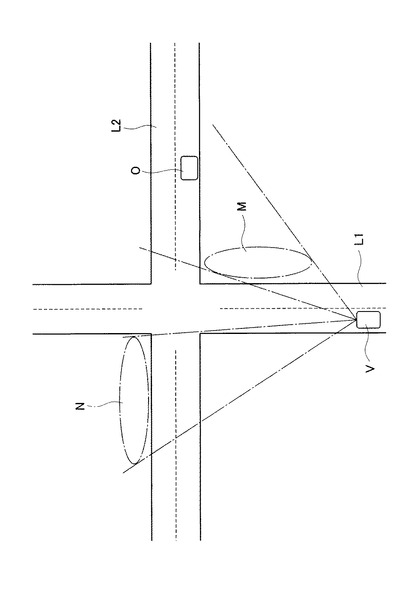
具体的な例を挙げて説明すると、例えば図17に示すように、自車Vが道路L1と道路L2とが交わる交差点に進入しようとしているシーンにおいて、交差点の周囲には街路樹M,Nがあり、さらに道路L2上を他車両Oが交差点に向かって走行しているものとする。なお、この図17の例は、自車Vの前方の障害物を障害物検出装置で検出する場合の例である。この図17に例示する走行シーンにおいては、街路樹Mと街路樹Nとがそれぞれ直視物体となるが、街路樹Mの背後の物体背後領域は道路L2と重なり、街路樹Nの物体背後領域は道路L1にも道路L2にも重ならない。したがって、影響判定部32は、街路樹Mの背後の物体背後領域が、自車Vの走行に影響を与える可能性があると判断する。そして、この街路樹Mの背後の物体背後領域を含むように、パルス検知領域設定部32によってパルスモードで物体検知を行うためのパルス検知領域が設定される。
【0068】
なお、パルス検知領域設定部32は、街路樹Mの背後の物体背後領域の範囲が正確に求められている場合には、この物体背後領域の範囲をパルス検知領域として設定すればよく、また、物体背後領域の角度幅に対して余裕を持たせた角度範囲でパルス検知領域を設定するようにしてもよい。また、FMCWモードでの物体検知により検知された直視物体が例えばビルや路側壁などの遮断物体の場合には、第3の実施形態で説明したように、この遮断物体の背後の背後領域にはパルス検知領域を設定しないようにしてもよい。
【0069】
以上、具体的な例を挙げながら詳細に説明したように、本実施形態の障害物検出装置によれば、自車が交差点に進入する走行シーンにおいても直視物体と背後物体とを高精度に分離検知することが可能となり、自車の走行の障害となる可能性がある障害物を適切に検出することができる。
【0070】
[第6の実施形態]
次に、本発明の第6の実施形態について説明する。本実施形態は、送信部10をパルスモードで動作させてパルス変調した電波信号を送信アンテナ16から送信する際に、電波信号の下向き送信角度を最適化して、上述した路面反射を利用した背後物体の検知を効率良く行えるようにした例である。また、本実施形態では、電波信号の下向き送信角度と直視物体までの距離とから、パルス検知領域内に背後物体を検知できない検知不可領域があるか否かを判定し、検知不可領域がある場合にそれを除外するように、パルス検知領域を補正するようにしている。なお、その他の構成および基本的な動作は第1の実施形態と同様であるので、以下の説明では、第1の実施形態と共通若しくは対応する構成要素については同一の符号を用い、重複する説明は省略する。
【0071】
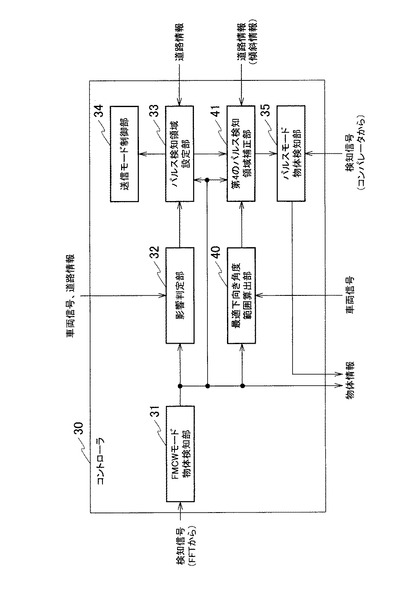
図18は、第6の実施形態の障害物検出装置におけるコントローラ30の機能ブロック図である。本実施形態の障害物検出装置では、図18に示すように、コントローラ30の機能構成として、第1の実施形態で説明した構成に加えて、最適下向き角度範囲算出部40と、第4のパルス検知領域補正部41とが付加されている。
【0072】
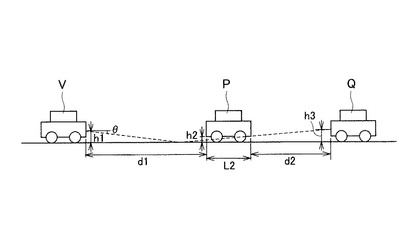
最適下向き角度範囲算出部40は、FMCWモード物体検知部31からの物体情報を用いて、路面反射を利用した背後物体の検知を効率良く行うための電波の下向き送信角度の最適範囲を算出する。すなわち、FMCWモード物体検知部31で検知された直視物体が車両などの路面との間に隙間を持つ物体である場合に、この直視物体の背後に存在する背後物体を電波の路面反射を利用して効率良く検知するには、電波の下向き送信角度を最適化することが有効である。ここで、例えば図19のように、自車Vの前方に直視物体である先行車Pが走行しており、さらに先行車両Pの前方に背後物体である先々行車Qが走行しているシーンにおいて、電波の路面反射を利用して先々行車Qを検知する場合を考えると、電波の下向き送信角度θは、下記式(1)のようになる。
θ=max[tan-1((h2+h1)/(d1+L2)),tan-1((h3+h1)/(d1+L2+d2))] ・・・(1)
なお、d1は自車Vから先行車Pまでの距離であり、d2は先行車Pから先々行車Qまでの距離であり、L2は先行車Pの長さである。また、h1はレーザ設置高さ、h2は先行車Pの最低地上高、h3は先々行車Qの反射面高さ(バンパ高さ)である。
【0073】
ここで、先行車Pから先々行車Qまでの距離d2の取りうる範囲を例えば1m〜100mと設定した場合、自車Vから先行車Pまでの距離d1と電波の下向き照射角度θとの関係は図20のようになる。なお、図20のグラフは、先行車Pの長さL2を4.5m、レーザ設置高さh1を50cm、先行車Pの最低地上高h2を法定最低地上高である9cm、先々行車Qの反射面高さを法定最高地上高+5cmの30cmとおき、先行車Pから先々行車Qまでの距離d2を1m〜100mの範囲で振ったときのd1とθとの関係を、上記の式(1)により求めたものである。
【0074】
この図20を参照すると、d2の範囲を1m〜100mと設定した場合、直視物体である先行車Pまでの距離d1が例えば10mであれば、電波の下向き送信角度θを0.8〜3.4程度の範囲に設定することで、電波の路面反射を利用して背後物体である先々行車Qを的確に検知できることが分かる。また、距離d1が例えば20mであれば電波の下向き送信角度θを0.7〜2.0程度の範囲とし、距離d1が例えば30mであれば電波の下向き送信角度θを0.6〜1.5程度の範囲とすることで、電波の路面反射を利用して背後物体である先々行車Qを的確に検知できることが分かる。
【0075】
最適下向き角度範囲算出部40は、以上のようなd2の設定範囲に応じたd1とθとの関係を示すデータを予め保持しており、FMCWモード物体検知部31からの物体情報を用いて直視物体までの距離d1を特定して、この距離d1に応じた電波の下向き送信角度θの最適範囲を算出する。ただし、自車にピッチングが生じている場合には、路面に対して電波が照射される角度が変化することになるので、最適下向き角度範囲算出部40は、車両信号を入力して自車の挙動を把握し、自車に加減速や旋回によるピッチングが生じると判定した場合には、上記の角度範囲を自車のピッチングの特性に応じて例えば±0.5°〜±2°程度拡張する。この最適下向き角度範囲算出部40により電波の下向き送信角度の最適範囲が算出されると、送信部10がパルスモードで動作する際に、送信アンテナ16からその角度範囲でパルス変調された電波信号が送信される。
【0076】
なお、送信部10の送信アンテナ16(受信アンテナ18)の可動範囲が限定されている場合、直視物体までの距離d1に応じて求めた電波の下向き送信角度の最適範囲が、送信部10の送信アンテナ16(受信アンテナ18)の可動範囲外となることも想定される。このような場合には、最適下向き角度範囲算出部40は、直視物体までの距離d1に応じて求めた電波の下向き送信角度の最適範囲を、送信アンテナ16の可動範囲の最大値により制限する。このように電波の下向き送信角度の最適範囲を制限すると、直視物体までの距離d1によっては、直視物体に近い位置に背後物体を検知できない検知不可領域が生じる。そこで、このような検知不可領域が生じた場合には、第4のパルス検知領域補正部41によりパルス検知領域を補正して、検知不可領域をパルスモードでの物体検知の対象から除外する。
【0077】
第4のパルス検知領域補正部41は、最適下向き角度範囲算出部40で算出された角度範囲と、FMCWモード物体検知部31からの物体情報(直視物体までの距離)とに基づいて、電波の下向き送信角度の制限により背後物体を検知できない検知不可領域が生じているか否かを判定する。そして、検知不可領域が生じている場合には、この検知不可領域をパルス検知領域から除外するように、パルス検知領域設定部33により設定されたパルス検知領域を補正する。また、第4のパルス検知領域補正部41は、送信部10から電波信号を送信している方向の道路の傾斜を道路情報から把握し、道路の傾斜により路面反射した電波が遮断されて背後物体を検知できない検知不可領域が生じているか否かを判定する。そして、このような検知不可領域が生じている場合にも、この検知不可領域をパルス検知領域から除外するように、パルス検知領域設定部33により設定されたパルス検知領域を補正する。
【0078】
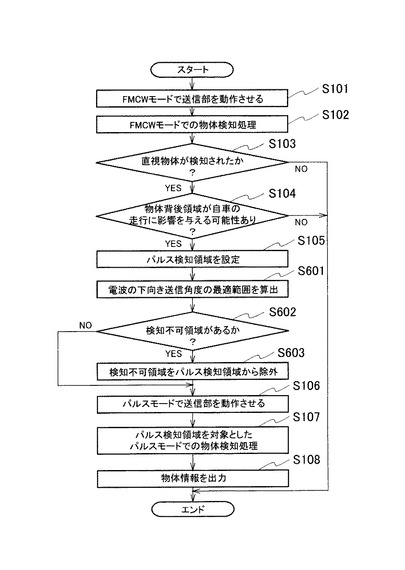
次に、以上のように構成される本実施形態の障害物検出装置の動作について、図21のフローチャートを参照しながら説明する。図21のフローチャートは、本実施形態の障害物検出装置におけるコントローラ30によって所定周期ごとに繰り返し実行される障害物検出処理の流れを示したものであり、図6に示した第1の実施形態での処理に加え、ステップS601〜ステップS603の処理を追加したものである。なお、ステップS101〜ステップS108の処理は第1の実施形態と同様であるため、説明を省略する。
【0079】
本実施形態では、ステップS105においてパルス検知領域を設定した後、コントローラ30が、ステップS601において、送信部10をパルスモードで動作させる際の電波信号の下向き送信角度の最適範囲を算出する(最適下向き角度範囲算出部40)。次に、コントローラ30は、ステップS602において、電波の下向き送信角度が制限されることにより背後物体を検知できない検知不可領域、或いは道路の傾斜で電波が遮断されることにより背後物体を検知できない検知不可領域が存在するか否かを判定する。そして、検知不可領域が存在すると判断した場合は、次のステップS603において、検知不可領域を除外するようにパルス検知領域を補正してステップS106に進む。一方、検知不可領域が存在しないと判断した場合には、そのままステップS106に進む(第4のパルス検知領域補正部41)。なお、本実施形態では、ステップS106において、パルスモードで送信部10を動作させる際に、パルス変調した電波信号の下向き送信角度の角度範囲がステップS601で算出した最適範囲となるように、電波信号の送信を制御する。
【0080】
以上、具体的な例を挙げながら説明したように、本実施形態の障害物検出装置によれば、送信部10をパルスモードで動作させる際の電波信号の下向き送信角度が最適範囲となるように制御しているので、パルスモードでの物体検知において路面反射を利用した背後物体の検知を効率良く行うことができる。
【0081】
また、本実施形態の障害物検出装置によれば、パルス検知領域内に路面反射を利用した背後物体の検知ができない検知不可領域が存在するか否かを判定し、検知不可領域が存在すると判断した場合には、パルス検知領域を補正して検知不可領域を除外するようにしているので、パルスモードでの物体検知処理をより効率的に行うことが可能となる。
【0082】
なお、以上説明した本発明の実施形態は、本発明の一適用例を例示的に示したものであり、本発明の技術的範囲が上記の実施形態として開示した内容に限定されることを意図するものではない。つまり、本発明の技術的範囲は、上記の実施形態で開示した具体的な技術事項に限らず、この開示から容易に導きうる様々な変形、変更、代替技術なども含むものである。
【符号の説明】
【0083】
10 送信部
11 キャリア周波数発振器
12 変調周波数発振器
13 結合器
14 パルス発生器
15 パルス変調回路
16 送信アンテナ
20 受信部
21 受信アンテナ
22 結合器
23 高速フーリエ変換部(FFT)
24 検波増幅器
25 コンパレータ
31 FMCWモード物体検知部
32 影響判定部
33 パルス検知領域設定部
34 送信モード制御部
35 パルスモード物体検知部
36 第1のパルス検知領域補正部
37 検知物体同一性判定部
38 第2のパルス検知領域補正部
39 第3のパルス検知領域補正部
40 最適下向き角度範囲算出部
41 第4のパルス検知領域補正部
【技術分野】
【0001】
本発明は、レーダを用いて車両の走行の障害となる可能性のある障害物を検出する障害物検出装置に関する。
【背景技術】
【0002】
従来、車両の車線変更などにおける安全性を確保するための技術として、例えば特許文献1に記載されたものが知られている。この特許文献1に記載の技術では、例えばドライバによる方向指示器の操作などから車線変更の意志を判定し、互いに近い位置を走行している車両間の接近状態と合わせて、これらの車両同士で車車間通信(車両同士間の通信)により車線変更が行われる旨の情報を送受信することで、車両走行の障害となる可能性を精度良く判断し、必要な場合に警告を与えてドライバに注意を促すようにしている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−320536号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載されている従来の技術では、他の車両が自車の走行の障害となるものであるか否かを精度良く判断するためには、各車両が車車間通信を行うための端末を搭載している必要がある。つまり、自車に近い位置を走行している他の車両が車車間通信を行うための端末を搭載していなければ、この車両が自車の走行の妨げとなる車両であるかどうかを精度良く判断できない、といった問題がある。
【0005】
本発明は、以上のような従来技術の問題点を解消すべく創案されたものであって、他の車両の装備に依存せず、自車両の走行の障害となる可能性のある障害物を適切に検出することができる障害物検出装置を提供することを目的としている。
【課題を解決するための手段】
【0006】
本発明に係る障害物検出装置は、レーダを用いて車両の走行の障害となる障害物を検出するものであり、周波数変調した連続波の電磁波を用いて物体を検知するFMCWレーダ部と、パルス変調した電磁波を用いて物体を検知するパルスレーダ部とを備え、FMCWレーダ部により物体を検知した場合にパルスレーダ部による物体検知を行うことで、車両の走行の障害となる可能性のある障害物を検出する。
【発明の効果】
【0007】
本発明に係る障害物検出装置によれば、方位分解能が高いFMCWレーダ部で物体が検知された場合に距離分解能が高いパルスレーダ部で物体検知を行うことで、例えばFMCWレーダ部で検知された車両の背後に隠れる他の車両を、電磁波の路面反射を利用して、距離分解能の高いパルスレーダ部で高精度に分離検知することが可能となり、車両の走行の障害となる可能性のある障害物を適切に検出することができる。
【図面の簡単な説明】
【0008】
【図1】本発明を適用した障害物検出装置の一例を示す構成図である。
【図2】第1の実施形態の障害物検出装置において、コントローラにより実現する機能をブロック化して示す機能ブロック図である。
【図3】パルス検知領域の設定方法の一例を説明する模式図である。
【図4】電波信号の周波数の時間変化を示す図であり、(a)はFMCWモードの場合の電波信号、(b)はパルスモードの場合の電波信号をそれぞれ示している。
【図5】電波の路面反射により直視物体の背後の背後物体を検知可能であることを示す模式図である。
【図6】第1の実施形態の障害物検出装置において、コントローラにより所定周期ごとに繰り返し実行される障害物検出処理の流れを示すフローチャートである。
【図7】第2の実施形態の障害物検出装置において、コントローラにより実現する機能をブロック化して示す機能ブロック図である。
【図8】道路形状に応じてパルス検知領域を補正する方法の一例を説明する模式図である。
【図9】道路形状に応じてパルス検知領域を補正する方法の他の例を説明する模式図である。
【図10】第2の実施形態の障害物検出装置において、コントローラにより所定周期ごとに繰り返し実行される障害物検出処理の流れを示すフローチャートである。
【図11】第3の実施形態の障害物検出装置において、コントローラにより実現する機能をブロック化して示す機能ブロック図である。
【図12】パルス検知領域内に遮断物体が存在する場合にパルス検知領域を補正する方法の一例を説明する模式図である。
【図13】第3の実施形態の障害物検出装置において、コントローラにより所定周期ごとに繰り返し実行される障害物検出処理の流れを示すフローチャートである。
【図14】第4の実施形態の障害物検出装置において、コントローラにより実現する機能をブロック化して示す機能ブロック図である。
【図15】パルス検知領域の近傍に他の直視物体が存在する場合にパルス検知領域を補正する方法の一例を説明する模式図である。
【図16】第4の実施形態の障害物検出装置において、コントローラにより所定周期ごとに繰り返し実行される障害物検出処理の流れを示すフローチャートである。
【図17】自車が交差点に進入しようとしているシーンでのパルス検知領域の設定要否を判定する方法を説明する模式図である。
【図18】第6の実施形態の障害物検出装置において、コントローラにより実現する機能をブロック化して示す機能ブロック図である。
【図19】路面反射により背後物体を検知するための電波の下向き角度を説明する模式図である。
【図20】直視物体までの距離d1と、直視物体と背後物体との間の距離d2と、電波の下向き照射角度θとの関係の一例を示すグラフ図である。
【図21】第6の実施形態の障害物検出装置において、コントローラにより所定周期ごとに繰り返し実行される障害物検出処理の流れを示すフローチャートである。
【発明を実施するための形態】
【0009】
本発明に係る障害物検出装置は、レーダを用いて車両(障害物検出装置を搭載した車両であり、以下、自車という。)の走行の障害となる障害物を検出するものである。車両用として用いられるレーダの方式としては、主に、周波数変調した連続波の電磁波を用いて物体を検知するFMCWレーダと、パルス変調した電磁波を用いて物体を検知するパルスレーダが知られているが、これらの方式を比較すると、FMCWレーダは、例えばDBF(digital Beam Forming)やMUSIC(Multiple Signal Classification)アルゴリズムなどを用いることで高い方位分解能が得られるが、距離分解能の点では劣るという特性があり、逆に、パルスレーダは、方位分解能は低い反面、高い距離分解能が得られるという特性がある。本発明に係る障害物検出装置は、これら2つの方式の特性を利用して高精度な障害物検知を行えるようにしたものであり、FMCW方式で物体検知を行うFMCWレーダ部と、パルス方式で物体検知を行うパルスレーダ部とを備え、FMCWレーダ部により物体を検知した場合にパルスレーダ部による物体検知を行うことで、自車の走行の障害となる可能性のある障害物を検出することを基本とする。
【0010】
自車の周辺の障害物を検出する手法としては、例えば車載カメラで撮影した画像を解析して障害物となる他車両などの物体を検出する手法なども多く用いられている。しかしながら、この手法では、車載カメラで直視できる物体の背後に隠れる他車両などの物体は検知できないという問題がある。この背後に隠れる物体は、例えば、自車が車線変更する際に同じ車線に車線変更することも考えられるため、自車の走行の安全性を確保するためには検知しておくことが望まれる物体である。特許文献1に記載される従来技術では、車車間通信を利用した車両同士の情報共有により、以上のような背後に隠れる他の車両などの影響も認識できるようにしているが、これを実現するためには全ての車両が車車間通信を行う端末を搭載している必要があり、現実的でない。そこで、本発明では、以上のように特性の異なる2つの方式のレーダを、それぞれの方式の特性を活かせるように効果的に利用することによって、背後に隠れる他車両などの物体を含め、自車の走行に影響を及ぼす可能性のある障害物を検出できるようにしている。
【0011】
レーダを用いた障害物検出の利点として、自車から出射した電磁波が直接当たる物体(以下、直視物体という。)が車両などの路面との間に隙間を持つ物体である場合に、路面反射を利用して電磁波が直視物体の背後に廻りこみ、直視物体の背後に隠れる物体(以下、背後物体という。)の検知が可能であるという点が挙げられる。つまり、物体検知のための電磁波の伝播路としては1回路面を経由した伝播路も有効であり、この伝播路のデータを利用することで背後物体の検知も可能となる。ただし、FMCWレーダでは、距離分解能が低いために、このような背後物体を直視物体から正確に分離して検知することが難しい。これに対して、パルスレーダは、方位分解能は低いが距離分解能が高いので、検知対象の範囲がある程度絞られれば背後物体を精度良く検知することが可能となる。このような観点から、本発明に係る障害物検出装置では、FMCWレーダ部で比較的広い範囲で直視物体の検知を行い、FMCWレーダ部で直視物体が検知された場合に、この直視物体の背後の領域を含む限定された領域をパルス検知領域として設定し、この限定されたパルス検知領域においてパルスレーダ部での物体検知を行うことで、背後物体を含めて自車の走行の障害となる可能性のある障害物を検出するようにしている。
【0012】
以下、以上のような本発明の技術思想を適用した具体的な実施形態について、図面を参照しながら詳細に説明する。なお、以下の各実施形態では、レーダとして、ミリ波帯周波数の電波を用いて物体検知を行うミリ波レーダを用いることを前提として説明するが、ミリ波レーダ以外のレーダを用いる構成であっても、本発明は有効に適用することができる。
【0013】
[第1の実施形態]
図1は、本発明を適用した車両用の障害物検出装置の一例を示す構成図である。この障害物検出装置は、例えばミリ波帯周波数の電波信号を自車前方或いは後方の所定領域に向けて送信(出射もしくは照射とも言う)する送信部10と、送信部10から送信された電波信号が物体(ターゲット)にて反射されて戻ってきた反射波を受信して検知信号を生成する受信部20と、受信部20で生成された検知信号に基づいて障害物を検出する処理を行うとともに送信部10からの電波信号の送信を制御するコントローラ30とを備える。
【0014】
送信部10には、送信信号のキャリアとなるキャリア周波数(例えば、77.00GHz)を送出するキャリア周波数発振器11と、このキャリアを周波数変調するための変調周波数を送出する変調周波数発振器12と、キャリア周波数発振器11から送出されるキャリアと変調周波数発振器12から送出される変調周波数とをミキシングして、キャリアを周波数変調した電波信号を生成する結合器13と、パルス信号を発生するパルス発生器14と、パルス発生器14からのパルス信号に基づいて、パルス変調した電波信号を生成するパルス変調回路15と、電波信号を送信するための送信アンテナ16とが設けられている。
【0015】
また、受信部20には、反射波を受信して受信信号を出力する受信アンテナ21と、受信アンテナ21からの受信信号と周波数変調した電波信号とをミキシングしてビート信号を生成する結合器22と、ビート信号を高速フーリエ変換により周波数分析して検知信号を出力する高速フーリエ変換部(FFT)23と、受信アンテナ21からの受信信号を検波、増幅して検波信号を出力する検波増幅器24と、検波増幅器24からの検波信号を閾値と比較して検知信号を出力するコンパレータ25とが設けられている。
【0016】
コントローラ30は、受信部20にて生成された検知信号と、自車の動作状態を表す車両信号と、自車が走行している道路に関する道路情報とを入力し、自車の走行に障害となる可能性のある障害物を検出する処理を行うとともに、送信部10から周波数変調した連続波の電波信号を送信させる(FMCWモード)か或いはパルス変調した電波信号を送信させる(パルスモード)かを制御する。なお、車両信号としては、例えばウィンカースイッチ信号や舵角信号などが挙げられ、これらの車両信号は、例えばCANなどの車載ネットワーク経由でコントローラ30に入力される。また、道路情報としては、例えば自車が走行している道路の車線幅、車線数、形状、曲率、車線内自車位置などの情報が挙げられ、これらの道路情報は、自車に搭載されたナビゲーションコントローラなどから車載ネットワーク経由でコントローラ30に入力される。
【0017】
図2は、コントローラ30により実現する機能をブロック化して示す機能ブロック図である。本実施形態の障害物検出装置において、コントローラ30は、図2に示すように、FMCWモード物体検知部31と、影響判定部32と、パルス検知領域設定部33と、送信モード制御部34と、パルスモード物体検知部35の各機能構成を備える。
【0018】
FMCWモード物体検知部31は、送信部10がFMCWモードで動作して周波数変調した連続波の電波信号を送信アンテナ16から送信している状態で、受信部20のFFT23から出力された検知信号に基づいて直視物体の物体検知を行い、自車に対する直視物体の相対位置(距離や方位)を算出して、その情報を物体情報として出力する。
【0019】
影響判定部32は、FMCWモード物体検知部31により直視物体が検知された場合に、FMCWモード物体検知部31から出力された物体情報をもとに、自車から見て直視物体の背後に隠れて影となる領域(以下、物体背後領域という。)を認識し、この物体背後領域が自車の走行に影響を与える可能性があるか否かを、車両信号や道路情報を用いて判定する。具体的な例を挙げて説明すると、影響判定部32は、例えば、道路情報から自車が走行している走行車線や隣接車線を把握し、車両信号として入力されるウィンカースイッチ信号や舵角信号から自車が走行車線から隣接車線へと車線変更しようとしていると判断されるときに、物体背後領域が自車の走行車線または隣接車線と重なっている場合には、物体背後領域が自車の走行に影響を与える可能性があると判定する。影響判定部32は、以上のようにして物体背後領域が自車の走行に影響を与える可能性があると判定した場合、パルス検知領域設定部33に対してパルス検知領域を設定する旨の指令を出力する。
【0020】
パルス検知領域設定部33は、影響判定部32からパルス検知領域の設定指令が出力されると、道路情報やFMCWモード物体検知部31からの物体情報をもとに、物体背後領域を含む限定された領域を、パルスモード物体検知部35で物体検知を行う対象となるパルス検知領域として設定する。そして、パルス検知領域設定部33は、パルス検知領域を設定すると、送信モード制御部34に対してモード制御指令を出力するとともに、パルスモード物体検知部35に対して設定したパルス検知領域の情報を出力する。
【0021】
ここで、パルス検知領域設定部33により設定するパルス検知領域の一例について、図3に示すような具体的な走行シーンを例示しながら説明する。この図3に例示する走行シーンは、自車Vの前方の障害物を検出する場合の例であり、自車Vが走行している走行車線の前方を直視物体となる他車両Sが走行しており、この他車両Sの物体背後領域となる走行車線の前方に他車両A、他車両Sの物体背後領域となる隣接車線の前方に他車両Bが存在している走行シーンである。この図3の走行シーンの場合、他車両Sの背後に隠れる物体背後領域は走行車線と隣接車線とに重なっているため、自車Vが走行車線から隣接車線へと車線変更しようとする状況では、この物体背後領域が自車Vの走行に影響を与える可能性がある。つまり、走行車線上の物体背後領域に存在する他車両Aは自車Vと同様に隣接車線に車線変更する可能性があり、また隣接車線上の物体背後領域に存在する他車両Bは自車Vに対する相対速度が低いと車線変更した自車Vに接近してくるため、自車Vの走行に影響を与えることになる。したがって、図3のような走行シーンにおいて、自車Vが走行車線から隣接車線へと車線変更する場合には、自車Vから直視物体である他車両Sまでの距離dと、走行車線および隣接車線の車線幅Wとに基づき、パルス検知領域を例えば以下の条件1および条件2に従って設定する。
条件1:自車Vからパルス検知領域までの距離がd以上
条件2:自車Vの向きを基準として車線変更する隣接車線の方向を正とした場合のパルス検知領域の角度範囲が0〜tan-1(d/1.5W)
【0022】
なお、以上の説明は、自車が直進路である走行車線のほぼ中央を走行していると仮定した場合のパルス検知領域の設定方法の一例であり、パルス検知領域の設定方法としては上記以外にも様々なバリエーションが考えられる。つまり、パルス検知領域は、少なくとも直視物体の背後に隠れる物体背後領域が含まれるように設定されればよく、例えば、FMCWモード物体検知部31により直視物体の大きさを正確に検知でき、物体背後領域の範囲を正確に求められるような場合には、その物体背後領域をパルス検知領域として設定するようにしてもよい。また、本実施形態では、コントローラ30の処理負荷低減等を考慮して、直視物体の背後に隠れる物体背後領域が自車の走行に影響を与える可能性があると判断した場合にのみパルス検知領域を設定してパルスモードでの物体検知を行うようにしているが、物体背後領域が自車の走行に影響を与える可能性があるか否かに関わらず、物体背後領域を含むパルス検知領域を設定してパルスモードでの物体検知を行うようにしてもよい。
【0023】
送信モード制御部34は、送信部10における送信モードを制御するものである。すなわち、送信モード制御部34は、コントローラ30にて実行する障害物検出処理(詳細は後述する)の処理サイクルの初期状態においては、送信部10をFMCWモードで動作させて周波数変調した連続波の電波信号を送信アンテナ16から送信させ、パルス検知領域設定部33からモード制御指令が出力されると、送信部10をパルスモードで動作させてパルス変調した電波信号を送信アンテナ16から送信させる。
【0024】
具体的には、送信モード制御部34は、送信部10をFMCWモードで動作させる際は、変調周波数発振器12を作動させるとともに、パルス変調回路15のスイッチを常時オンさせる指令を出力し、キャリア周波数発振器11からのキャリアを周波数変調した連続波の電波信号を送信アンテナ16から送信させる。ここで、変調周波数発振器12が送出する変調周波数としては、図4(a)に示すように、キャリア周波数f0に対する周波数変調幅fmが例えば100MHz程度の三角波を用いればよい。
【0025】
また、送信モード制御部34は、送信部10をパルスモードで動作させる際は、変調周波数発振器12の作動を停止するとともにパルス発生器14を作動させ、パルス変調回路15のスイッチをパルス発生器14からのパルス信号に応じてオンオフさせることで、キャリア周波数発振器11からのキャリアをパルス変調した電波信号を送信アンテナ16から送信させる。ここで、パルス発生器14が発生するパルス信号としては、図4(b)に示すように、パルスオン期間とオン期間との間に受信待ち時間Tが設定され、この受信待ち時間Tが例えば66μsec程度(検知距離200m程度を想定した場合)となるような信号を用いればよい。
【0026】
なお、以上の説明は、FMCWモードとパルスモードとを時分割で切替える場合を想定して、パルスモード時には一定周波数のキャリアをパルス変調した電波信号を送信させるとしたが、FMCWモードの動作とパルスモードの動作とを同時に行うことも可能である。すなわち、送信モード制御部34が、パルス検知領域設定部33からモード制御信号が出力されたときに、変調周波数発振器12の作動を継続させたままパルス発生器14からパルス信号を出力させるように制御すれば、周波数変調したキャリアをパルス変調した電波信号を出力させることができる。この場合には、パルス検知領域を対象としたパルスモード物体検知部35での物体検知処理と、パルス検知領域以外の領域を対象としたFMCWモード物体検知部31での物体検知処理とを並行して行うことが可能となり、効率的である。
【0027】
パルスモード物体検知部35は、送信部10がパルスモードで動作してパルス変調した電波信号を送信アンテナ16から送信している状態で、受信部20のコンパレータ25から出力された検知信号に基づいて、パルス検知領域設定部33により設定されたパルス検知領域を対象としたパルスモードによる物体検知を行う。そして、パルス検知領域内に他車両などの物体が存在すれば、その物体の自車に対する相対位置(距離や方位)を算出して、その情報を物体情報として出力する。FMCWモード物体検知部31により検知された直視物体が車両などの路面との間に隙間を持つ物体であれば、このパルスモード物体検知部35による物体検知処理により、図5に示すような路面反射を利用して、この直視物体の背後に隠れる背後物体を直視物体から分離して検知することが可能となる。なお、図5は、図3に示した走行シーンにおいて、自車Vから送信される電波が路面反射により自車V前方の直視物体である他車両Sの背後に廻りこむことで、背後物体である他車両Aが検知可能であることを示す模式図である。
【0028】
本実施形態の障害物検出装置は、コントローラ30が以上の各機能構成を備えることで本発明の技術思想を具現化し、自車の走行の障害となる可能性のある障害物を適切に検出できるようにしている。なお、上述した障害物検出装置の構成において、送信部10のキャリア周波数発振器11、変調周波数発振器12、結合器13、送信アンテナ16と、受信部20の受信アンテナ21、結合器22、FFT23と、コントローラ30のFMCWモード物体検知部31とが、本発明の「FMCWレーダ部」に相当する。また、送信部10のキャリア周波数発振器11、パルス発生器14、パルス変調回路15、送信アンテナ16と、受信部20の検波増幅器24、コンパレータ25と、コントローラ30のパルスモード物体検知部35とが、本発明の「パルスレーダ部」に相当する。
【0029】
次に、以上のように構成される本実施形態の障害物検出装置の動作について、図6のフローチャートを参照しながら説明する。図6のフローチャートは、コントローラ30により所定周期ごとに繰り返し実行される障害物検出処理の流れを示したものである。
【0030】
図6の処理フローが開始されると、コントローラ30は、まずステップS101において、送信部10をFMCWモードで動作させ、送信アンテナ16からキャリアを周波数変調した連続波の電波信号を、自車前方或いは後方の所定領域(上述したパルス検知領域よりも広い探索領域)に向けて送信させる(送信モード制御部34)。
【0031】
次に、コントローラ30は、ステップS102において、受信部20のFFT23から出力される検知信号に基づいて、FMCWモードでの物体検知を行う(FMCWモード物体検知部31)。そして、ステップS103において、FMCWモードでの物体検知により物体(直視物体)が検知されたかどうかを判定し、直視物体が検知されない場合は今回の処理周期における処理を終了する。一方、FMCWモードでの物体検知により直視物体が検知された場合には、次のステップS104において、このFMCWモードで検知した直視物体の背後の物体背後領域が、自車の走行に影響を与える可能性があるか否かを判定する(影響判定部32)。
【0032】
そして、コントローラ30は、ステップS104での判定の結果、FMCWモードで検知した直視物体の背後の物体背後領域が自車の走行に影響を与える可能性がないと判定した場合は、今回の処理周期における処理を終了する。一方、FMCWモードで検知した直視物体の背後の物体背後領域が自車の走行に影響を与える可能性があると判定した場合には、次のステップS105において、この物体背後領域が含まれるように、パルスモードで物体検知を行うためのパルス検知領域を設定する(パルス検知領域設定部33)。
【0033】
次に、コントローラ30は、ステップS106において、送信部10をパルスモードで動作させ、送信アンテナ16からキャリアをパルス変調した電波信号を、自車前方或いは後方のパルス検知領域を含む所定領域に向けて送信させる(送信モード制御部34)。なお、このとき送信部10が電波信号の送信角度を高精度に制御可能であれば、ステップS105で設定したパルス検知領域のみに対応する角度範囲で電波信号を送信するようにしてもよい。
【0034】
次に、コントローラ30は、ステップS107において、受信部20のコンパレータ25から出力される検知信号に基づき、ステップS105で設定したパルス検知領域を対象として、パルスモードでの物体検知を行う(パルスモード物体検知部35)。そして、ステップS108において、ステップS102のFMCWモードでの物体検知により得られた物体情報と、ステップS107のパルスモードでの物体検知により得られた物体情報とを出力し、今回の処理周期における一連の処理を終了する。
【0035】
以上、具体的な例を挙げながら説明したように、本実施形態の障害物検出装置によれば、方位分解能の高いFMCWモードでの物体検知により直視物体が検知された場合に、直視物体の背後の物体背後領域を含むパルス検知領域を設定し、このパルス検知領域を対象として距離分解能の高いパルスモードでの物体検知を行うようにしているので、直視物体と背後物体とを高精度に分離検知することが可能となり、自車の走行の障害となる可能性のある障害物を適切に検出することができる。
【0036】
また、本実施形態の障害物検出装置によれば、直視物体の背後の物体背後領域が自車の走行に影響を与える可能性があるか否かを判定し、影響があると判断した場合にのみパルス検知領域を設定してパルスモードでの物体検知を行うようにしているので、コントローラ30での処理負荷を低減できるとともに、必要性の高い物体情報のみを抽出して自車のドライバに提示することができる。
【0037】
また、本実施形態の障害物検出装置によれば、自車が走行車線から隣接車線へと車線変更しようとしている場合で、且つ、物体背後領域が自車の走行車線または隣接車線と重なる場合に、物体背後領域が自車の走行に影響を与える可能性があると判断するようにしているので、パルスモードでの物体検知の必要性を的確且つ簡便に判断することができる。
【0038】
また、本実施形態の障害物検出装置によれば、自車が車線変更しようとしている状況でパルス検知領域を設定する場合に、FMCWモードで検知した自車から直視物体までの距離と、道路情報として取得した自車の走行車線および隣接車線の車線幅とに基づいてパルス検知領域を設定するようにしているので、パルス検知領域の設定を的確且つ簡便に行うことができる。
【0039】
[第2の実施形態]
次に、本発明の第2の実施形態について説明する。本実施形態は、自車の走行車線および隣接車線の道路形状に基づいて、第1の実施形態で説明したパルス検知領域を補正するようにした例である。すなわち、第1の実施形態では、自車が直進路で車線変更するシーンを想定してパルス検知領域の設定方法の一例を説明したが、例えば自車がカーブ路の近傍で車線変更する場合などでは、第1の実施形態で説明したパルス検知領域が必ずしも適切とはならない場合もある。そこで、本実施形態では、道路情報として取得される道路形状に基づいて、必要な場合には第1の実施形態で説明したパルス検知領域を補正するようにしている。また、本実施形態では、FMCWモードでの物体検知とパルスモードでの物体検知との双方で同一の物体を検知していると判断される場合には、FMCWモードでの物体検知により得られた物体情報を優先して出力するようにしている。なお、その他の構成および基本的な動作は第1の実施形態と同様であるので、以下の説明では、第1の実施形態と共通若しくは対応する構成要素については同一の符号を用い、第1の実施形態と重複する説明は省略する。
【0040】
図7は、第2の実施形態の障害物検出装置におけるコントローラ30の機能ブロック図である。本実施形態の障害物検出装置では、図7に示すように、コントローラ30の機能構成として、第1の実施形態で説明した構成に加えて、第1のパルス検知領域補正部36と、検知物体同一性判定部37とが付加されている。
【0041】
第1のパルス検知領域補正部36は、パルス検知領域設定部33によりパルス検知領域が設定された場合に、道路情報として入力される自車の走行車線および隣接車線の道路形状に基づいてパルス検知領域の補正の必要性を判定し、補正の必要ありと判断した場合には、パルス検知領域設定部33により設定したパルス検知領域を補正する。
【0042】
具体的な例を挙げて説明すると、例えば図8に示すように、自車Vが左旋回のカーブ路を越えた直後に走行車線から隣接車線に車線変更しようとしているシーンにおいて、自車Vの走行車線の後方には直視物体となる後続車両Cが走行しており、さらにその後方のカーブの手前では、隣接車線を他車両Dが走行しているものとする。なお、この図8の例は、自車Vの後方の障害物を障害物検出装置で検出する場合の例である。この図8に例示する走行シーンにおいては、第1の実施形態で説明した条件1および条件2に従ってパルス検知領域を設定すると、他車両Dが走行している位置はパルス検知領域から外れることになり、自車Vが車線変更を行う上で障害となる可能性がある他車両Dを適切に検出できなくなる虞がある。そこで、第1のパルス検知領域補正部36は、道路情報として入力される自車の走行車線および隣接車線の道路形状に基づいて、自車が図8のような走行シーンにあると判定した場合には、パルス検知領域設定部33により設定したパルス検知領域を補正する必要があると判断し、例えば第1の実施形態で説明した条件2に代えて、下記の条件3を用いてパルス検知領域を再設定することで、パルス検知領域の補正を行う。
条件3:自車Vの向きを基準として車線変更する隣接車線の方向を正とした場合のパルス検知領域の角度範囲が−tan-1(d/0.5W)〜tan-1(d/1.5W)
【0043】
また、例えば図9に示すように、自車Vが右旋回のカーブ路を越えた直後に走行車線から隣接車線に車線変更しようとしているシーンにおいて、自車Vの走行車線の後方に直視物体となる後続車両Eが走行しており、さらにその後方のカーブの手前の隣接車線を他車両Fが走行している場合には、後続車両Eの背後に隠れる物体背後領域が隣接車線と重なることはなく、カーブ手前で隣接車線を走行している他車両Fも直視物体となる。したがって、この図9に例示する走行シーンにおいては、第1の実施形態で説明した条件1および条件2に従ってパルス検知領域を設定すると、不要な領域に対してもパルスモードによる物体検知が行われることになり、効率的でない。そこで、第1のパルス検知領域補正部36は、道路情報として入力される自車の走行車線および隣接車線の道路形状に基づいて、自車が図9のような走行シーンにあると判定した場合には、パルス検知領域設定部33により設定したパルス検知領域を補正する必要があると判断し、例えば第1の実施形態で説明した条件2に代えて、下記の条件4を用いてパルス検知領域を再設定することで、パルス検知領域の補正を行う。
条件4:自車Vの向きを基準として車線変更する隣接車線の方向を正とした場合のパルス検知領域の角度範囲が0〜tan-1(d/0.5W)
【0044】
本実施形態では、以上のように第1のパルス検知領域補正部36によってパルス検知領域が補正された場合、パルスモード物体検知部35は、この補正されたパルス検知領域を対象としてパルスモードによる物体検知処理を行う。
【0045】
検知物体同一性判定部37は、FMCWモード物体検知部31での物体検知処理により得られた物体情報と、パルスモード物体検知部35での物体検知処理により得られた物体情報とのマッチングを行い、重複若しくは近似する物体情報が存在する場合、つまりFMCWモード物体検知部31とパルスモード物体検知部35との双方で検知されていると推定される物体が存在する場合に、この物体に関する物体情報としてFMCWモード物体検知部31で得られたものを選択して出力する。
【0046】
次に、以上のように構成される本実施形態の障害物検出装置の動作について、図10のフローチャートを参照しながら説明する。図10のフローチャートは、本実施形態の障害物検出装置におけるコントローラ30によって所定周期ごとに繰り返し実行される障害物検出処理の流れを示したものであり、図6に示した第1の実施形態での処理に加え、ステップS201〜ステップS204の処理を追加したものである。なお、ステップS101〜ステップS108の処理は第1の実施形態と同様であるため、説明を省略する。
【0047】
本実施形態では、ステップS105においてパルス検知領域を設定した後、コントローラ30が、ステップS201において、道路情報として入力される自車の走行車線および隣接車線の道路形状に基づいて、ステップS105で設定したパルス検知領域を補正する必要があるか否かを判定する。そして、パルス検知領域の補正が必要であると判断した場合は、次のステップS202において、ステップS105で設定したパルス検知領域を例えば上述した手法により補正してステップS106に進む。一方、パルス検知領域の補正が必要ないと判断した場合は、そのままステップS106に進む(第1のパルス検知領域補正部36)。
【0048】
また、本実施形態では、ステップS107においてパルス検知領域を対象としたパルスモードでの物体検知処理を行った後、コントローラ30が、ステップS203において、ステップS102のFMCWモードでの物体検知処理により得られた物体情報と、ステップS107のパルスモードでの物体検知処理により得られた物体情報とのマッチングを行って、FMCWモードとパルスモードの双方で同一物体を検知しているか否かを判定する。そして、FMCWモードとパルスモードの双方で検知している物体があれば、次のステップS204において、当該物体に関する物体情報として、ステップS102のFMCWモードでの物体検知処理により得られた物体情報を選択してステップS108に進む。一方、FMCWモードとパルスモードの双方で検知している物体がない場合には、そのままステップS108に進む(検知物体同一性判定部37)。
【0049】
以上、具体的な例を挙げながら説明したように、本実施形態の障害物検出装置によれば、自車の走行車線および隣接車線の道路形状に基づいてパルス検知領域の補正の要否を判定し、補正の必要ありと判断した場合には、自車の走行シーンに対応するようにパルス検知領域を補正するようにしているので、自車の走行に影響を与える可能性のある障害物をより精度良く検出することが可能になる。
【0050】
また、本実施形態の障害物検出装置によれば、FMCWモードとパルスモードとの双方で同一物体を検知していると判断される場合には、この物体に関する物体情報として、FMCWモードでの物体検知処理により得られた物体情報を優先して出力するようにしているので、自車の走行に影響を与える可能性のある障害物をより精度良く検出することが可能になる。
【0051】
[第3の実施形態]
次に、本発明の第3の実施形態について説明する。本実施形態は、第1の実施形態または第2の実施形態で説明したパルス検知領域内に例えば路側壁などの電波を遮断する物体(以下、遮断物体という。)が存在する場合に、この遮断物体の背後の領域をパルス検知領域から除外するように、パルス検知領域を補正するようにした例である。なお、その他の構成および基本的な動作は第1および第2の実施形態と同様であるので、以下の説明では、第1および第2の実施形態と共通若しくは対応する構成要素については同一の符号を用い、重複する説明は省略する。
【0052】
図11は、第3の実施形態の障害物検出装置におけるコントローラ30の機能ブロック図である。本実施形態の障害物検出装置では、図11に示すように、コントローラ30の機能構成として、第1および第2の実施形態で説明した構成に加えて、第2のパルス検知領域補正部38が付加されている。
【0053】
第2のパルス検知領域補正部38は、パルス検知領域設定部33により設定されたパルス検知領域、或いは第1のパルス検知領域補正部36により補正されたパルス検知領域内に遮断物体が存在するか否かを判断し、遮断物体が存在する場合には、この遮断物体の背後の領域をパルス検知領域から除外するように、パルス検知領域設定部33により設定されたパルス検知領域、或いは第1のパルス検知領域補正部36により補正されたパルス検知領域を補正する。
【0054】
具体的な例を挙げて説明すると、例えば図12に示すように、自車Vが左旋回のカーブ路を越えた直後に走行車線から隣接車線に車線変更しようとしているシーンにおいて、自車Vの走行車線の後方には直視物体となる後続車両Gが走行しており、走行車線の側方には遮断物体となる路側壁Hが存在しているものとする。なお、この図12の例は、自車Vの後方の障害物を障害物検出装置で検出する場合の例である。この図12に例示する走行シーンにおいては、第2の実施形態で説明したように、第1のパルス検知領域補正部36により上述した条件3に基づいてパルス検知領域が再設定されるが、第1のパルス検知領域補正部36により再設定されたパルス検知領域内に遮断物体である路側壁Hが存在し、路側壁Hにより電波が遮断されるため、その背後の領域では物体検知を行うことができない。そこで、第2のパルス検知領域補正部38は、パルス検知領域の角度範囲を遮断物体である路側壁Hと重ならない範囲に限定することで、パルス検知領域を補正する。なお、パルス検知領域内に遮断物体が存在するか否かは、例えば、道路情報に路側壁などの情報が含まれている場合にはその情報を用いて判断するようにしてもよいし、自車が車載カメラを搭載している場合にはその撮影画像を用いて判断してもよい。また、FMCWモードでの物体検知により得られた物体情報から判断することも可能である。
【0055】
次に、以上のように構成される本実施形態の障害物検出装置の動作について、図13のフローチャートを参照しながら説明する。図13のフローチャートは、本実施形態の障害物検出装置におけるコントローラ30によって所定周期ごとに繰り返し実行される障害物検出処理の流れを示したものであり、図10に示した第2の実施形態での処理に加え、ステップS301とステップS302の処理を追加したものである。なお、ステップS101〜ステップS108の処理は第1の実施形態と同様であり、ステップS201〜ステップS204の処理は第2の実施形態と同様であるため、説明を省略する。
【0056】
本実施形態では、ステップS201において道路形状に応じたパルス検知領域の補正が必要であると判断してステップS202でパルス検知領域の補正を行った後、或いはステップS201において道路形状に応じたパルス検知領域の補正は必要ないと判断した後に、コントローラ30が、ステップS301において、パルス検知領域内に遮断物体が存在するか否かを判定する。そして、パルス検知領域内に遮断物体が存在すると判断した場合は、次のステップS302において、遮断物体の背後の領域を除外するようにパルス検知領域を補正してステップS106に進む。一方、パルス検知領域内に遮断物体が存在しないと判断した場合には、そのままステップS106に進む(第2のパルス検知領域補正部38)。
【0057】
以上、具体的な例を挙げながら説明したように、本実施形態の障害物検出装置によれば、パルス検知領域内に例えば路側壁などの電波を遮断する遮断物体が存在するか否かを判定し、パルス検知領域内に遮断物体が存在すると判断した場合には、遮断物体の背後の領域を除外するようにパルス検知領域を補正するようにしているので、パルスモードでの物体検知処理をより効率的に行うことが可能となる。
【0058】
[第4の実施形態]
次に、本発明の第4の実施形態について説明する。本実施形態は、第1の実施形態または第2の実施形態で説明したパルス検知領域の近傍に他の直視物体が存在する場合に、この直視物体が存在する位置がパルス検知領域内に含まれるように、パルス検知領域を補正するようにした例である。なお、その他の構成および基本的な動作は第1および第2の実施形態と同様であるので、以下の説明では、第1および第2の実施形態と共通若しくは対応する構成要素については同一の符号を用い、重複する説明は省略する。
【0059】
図14は、第4の実施形態の障害物検出装置におけるコントローラ30の機能ブロック図である。本実施形態の障害物検出装置では、図14に示すように、コントローラ30の機能構成として、第1および第2の実施形態で説明した構成に加えて、第3のパルス検知領域補正部39が付加されている。
【0060】
第3のパルス検知領域補正部39は、FMCWモード物体検知部31から出力された物体情報を入力し、パルス検知領域設定部33により設定されたパルス検知領域、或いは第1のパルス検知領域補正部36により補正されたパルス検知領域の近傍に、当該パルス検知領域を設定する基準となった直視物体とは異なる他の直視物体が存在するか否かを判定する。そして、パルス検知領域の近傍に他の直視物体が存在する場合には、この直視物体が存在する位置がパルス検知領域内に含まれるように、パルス検知領域設定部33により設定されたパルス検知領域、或いは第1のパルス検知領域補正部36により補正されたパルス検知領域を補正する。
【0061】
具体的な例を挙げて説明すると、例えば図15に示すように、自車Vが左旋回のカーブ路を越えた直後に走行車線から隣接車線に車線変更しようとしているシーンにおいて、自車Vの走行車線の後方には直視物体となる後続車両Iが走行しており、カーブ手前の自車Vから離れた位置に、他車両Jが隣接車線上を走行しているものとする。なお、この図15の例は、自車Vの後方の障害物を障害物検出装置で検出する場合の例である。この図15に例示する走行シーンにおいては、第2の実施形態で説明したように、第1のパルス検知領域補正部36により上述した条件3に基づいてパルス検知領域が再設定されるが、自車Vから離れた位置の他車両Jが第1のパルス検知領域補正部36により再設定されたパルス検知領域の近傍を走行しており、短時間のうちにパルス検知領域内に入り込むことが予想される。そこで、第3のパルス検知領域補正部39は、FMCWモード物体検知部31から出力された他車両Jに関する物体情報から、この他車両Jの位置がパルス検知領域の近傍であると判断した場合に、パルス検知領域の角度範囲をこの他車両Jの位置が含まれるように拡大することで、パルス検知領域を補正する。これにより、他車両JがFMCWモードで検知されている間にパルスモードでも検知されるようにして、双方のモードで得られる物体情報の関連付けを行うことができ、他車両Jをロストすることなくトラッキングを継続することが可能となる。
【0062】
次に、以上のように構成される本実施形態の障害物検出装置の動作について、図16のフローチャートを参照しながら説明する。図16のフローチャートは、本実施形態の障害物検出装置におけるコントローラ30によって所定周期ごとに繰り返し実行される障害物検出処理の流れを示したものであり、図10に示した第2の実施形態での処理に加え、ステップS401とステップS402の処理を追加したものである。なお、ステップS101〜ステップS108の処理は第1の実施形態と同様であり、ステップS201〜ステップS204の処理は第2の実施形態と同様であるため、説明を省略する。
【0063】
本実施形態では、ステップS201において道路形状に応じたパルス検知領域の補正が必要であると判断してステップS202でパルス検知領域の補正を行った後、或いはステップS201において道路形状に応じたパルス検知領域の補正は必要ないと判断した後に、コントローラ30が、ステップS401において、パルス検知領域の近傍にFMCWモードでの物体検知によって検知された他の物体が存在するか否かを判定する。そして、パルス検知領域の近傍に他の物体が存在すると判断した場合は、次のステップS402において、他の物体の位置が含まれるようにパルス検知領域を補正してステップS106に進む。一方、パルス検知領域の近傍に他の物体が存在しないと判断した場合には、そのままステップS106に進む(第3のパルス検知領域補正部39)。
【0064】
以上、具体的な例を挙げながら説明したように、本実施形態の障害物検出装置によれば、パルス検知領域の近傍に当該パルス検知領域を設定する基準となった直視物体とは異なる他の直視物体が存在するか否かを判定し、パルス検知領域の近傍に他の直視物体が存在すると判断した場合には、この直視物体が存在する位置が含まれるようにパルス検知領域を補正するようにしているので、この物体をFMCWモードでの物体検知によりトラッキングしていた場合に、パルスモードでの物体検知に切り替わることでロストするといった不都合を有効に抑制することができる。
【0065】
[第5の実施形態]
次に、本発明の第5の実施形態について説明する。本実施形態は、FMCWモードで検知した直視物体の背後の物体背後領域が自車の走行に影響を与える可能性があるか否かの判定の他の例を示したものである。すなわち、上述の第1乃至第4の実施形態では、自車が車線変更するシーンを想定してコントローラ30の影響判定部32による判定手法の一例を説明したが、本実施形態では、自車が交差点に進入しようとしているシーンでの影響判定部32による判定手法について説明する。なお、障害物検出装置の構成および基本的な動作は上述した各実施形態と同様であるので、以下では、本実施形態の特徴である影響判定部32での判定方法についてのみ説明する。
【0066】
影響判定部32は、第1の実施形態で説明したように、FMCWモード物体検知部31により直視物体が検知された場合に、FMCWモード物体検知部31から出力された物体情報をもとに、この直視物体の物体背後領域を認識して、この物体背後領域が自車の走行に影響を与える可能性があるか否かを判定する。ここで、影響判定部32は、車両信号や道路情報に基づいて自車の走行シーンを推定し、自車が交差点に進入しようとしていると判断した場合には、交差点に繋がる道路の位置と物体背後領域の位置とを比較する。そして、交差点に繋がる道路の位置と物体背後領域の位置とが重なる場合に、物体背後領域が自車の走行に影響を与える可能性があると判断する。
【0067】
具体的な例を挙げて説明すると、例えば図17に示すように、自車Vが道路L1と道路L2とが交わる交差点に進入しようとしているシーンにおいて、交差点の周囲には街路樹M,Nがあり、さらに道路L2上を他車両Oが交差点に向かって走行しているものとする。なお、この図17の例は、自車Vの前方の障害物を障害物検出装置で検出する場合の例である。この図17に例示する走行シーンにおいては、街路樹Mと街路樹Nとがそれぞれ直視物体となるが、街路樹Mの背後の物体背後領域は道路L2と重なり、街路樹Nの物体背後領域は道路L1にも道路L2にも重ならない。したがって、影響判定部32は、街路樹Mの背後の物体背後領域が、自車Vの走行に影響を与える可能性があると判断する。そして、この街路樹Mの背後の物体背後領域を含むように、パルス検知領域設定部32によってパルスモードで物体検知を行うためのパルス検知領域が設定される。
【0068】
なお、パルス検知領域設定部32は、街路樹Mの背後の物体背後領域の範囲が正確に求められている場合には、この物体背後領域の範囲をパルス検知領域として設定すればよく、また、物体背後領域の角度幅に対して余裕を持たせた角度範囲でパルス検知領域を設定するようにしてもよい。また、FMCWモードでの物体検知により検知された直視物体が例えばビルや路側壁などの遮断物体の場合には、第3の実施形態で説明したように、この遮断物体の背後の背後領域にはパルス検知領域を設定しないようにしてもよい。
【0069】
以上、具体的な例を挙げながら詳細に説明したように、本実施形態の障害物検出装置によれば、自車が交差点に進入する走行シーンにおいても直視物体と背後物体とを高精度に分離検知することが可能となり、自車の走行の障害となる可能性がある障害物を適切に検出することができる。
【0070】
[第6の実施形態]
次に、本発明の第6の実施形態について説明する。本実施形態は、送信部10をパルスモードで動作させてパルス変調した電波信号を送信アンテナ16から送信する際に、電波信号の下向き送信角度を最適化して、上述した路面反射を利用した背後物体の検知を効率良く行えるようにした例である。また、本実施形態では、電波信号の下向き送信角度と直視物体までの距離とから、パルス検知領域内に背後物体を検知できない検知不可領域があるか否かを判定し、検知不可領域がある場合にそれを除外するように、パルス検知領域を補正するようにしている。なお、その他の構成および基本的な動作は第1の実施形態と同様であるので、以下の説明では、第1の実施形態と共通若しくは対応する構成要素については同一の符号を用い、重複する説明は省略する。
【0071】
図18は、第6の実施形態の障害物検出装置におけるコントローラ30の機能ブロック図である。本実施形態の障害物検出装置では、図18に示すように、コントローラ30の機能構成として、第1の実施形態で説明した構成に加えて、最適下向き角度範囲算出部40と、第4のパルス検知領域補正部41とが付加されている。
【0072】
最適下向き角度範囲算出部40は、FMCWモード物体検知部31からの物体情報を用いて、路面反射を利用した背後物体の検知を効率良く行うための電波の下向き送信角度の最適範囲を算出する。すなわち、FMCWモード物体検知部31で検知された直視物体が車両などの路面との間に隙間を持つ物体である場合に、この直視物体の背後に存在する背後物体を電波の路面反射を利用して効率良く検知するには、電波の下向き送信角度を最適化することが有効である。ここで、例えば図19のように、自車Vの前方に直視物体である先行車Pが走行しており、さらに先行車両Pの前方に背後物体である先々行車Qが走行しているシーンにおいて、電波の路面反射を利用して先々行車Qを検知する場合を考えると、電波の下向き送信角度θは、下記式(1)のようになる。
θ=max[tan-1((h2+h1)/(d1+L2)),tan-1((h3+h1)/(d1+L2+d2))] ・・・(1)
なお、d1は自車Vから先行車Pまでの距離であり、d2は先行車Pから先々行車Qまでの距離であり、L2は先行車Pの長さである。また、h1はレーザ設置高さ、h2は先行車Pの最低地上高、h3は先々行車Qの反射面高さ(バンパ高さ)である。
【0073】
ここで、先行車Pから先々行車Qまでの距離d2の取りうる範囲を例えば1m〜100mと設定した場合、自車Vから先行車Pまでの距離d1と電波の下向き照射角度θとの関係は図20のようになる。なお、図20のグラフは、先行車Pの長さL2を4.5m、レーザ設置高さh1を50cm、先行車Pの最低地上高h2を法定最低地上高である9cm、先々行車Qの反射面高さを法定最高地上高+5cmの30cmとおき、先行車Pから先々行車Qまでの距離d2を1m〜100mの範囲で振ったときのd1とθとの関係を、上記の式(1)により求めたものである。
【0074】
この図20を参照すると、d2の範囲を1m〜100mと設定した場合、直視物体である先行車Pまでの距離d1が例えば10mであれば、電波の下向き送信角度θを0.8〜3.4程度の範囲に設定することで、電波の路面反射を利用して背後物体である先々行車Qを的確に検知できることが分かる。また、距離d1が例えば20mであれば電波の下向き送信角度θを0.7〜2.0程度の範囲とし、距離d1が例えば30mであれば電波の下向き送信角度θを0.6〜1.5程度の範囲とすることで、電波の路面反射を利用して背後物体である先々行車Qを的確に検知できることが分かる。
【0075】
最適下向き角度範囲算出部40は、以上のようなd2の設定範囲に応じたd1とθとの関係を示すデータを予め保持しており、FMCWモード物体検知部31からの物体情報を用いて直視物体までの距離d1を特定して、この距離d1に応じた電波の下向き送信角度θの最適範囲を算出する。ただし、自車にピッチングが生じている場合には、路面に対して電波が照射される角度が変化することになるので、最適下向き角度範囲算出部40は、車両信号を入力して自車の挙動を把握し、自車に加減速や旋回によるピッチングが生じると判定した場合には、上記の角度範囲を自車のピッチングの特性に応じて例えば±0.5°〜±2°程度拡張する。この最適下向き角度範囲算出部40により電波の下向き送信角度の最適範囲が算出されると、送信部10がパルスモードで動作する際に、送信アンテナ16からその角度範囲でパルス変調された電波信号が送信される。
【0076】
なお、送信部10の送信アンテナ16(受信アンテナ18)の可動範囲が限定されている場合、直視物体までの距離d1に応じて求めた電波の下向き送信角度の最適範囲が、送信部10の送信アンテナ16(受信アンテナ18)の可動範囲外となることも想定される。このような場合には、最適下向き角度範囲算出部40は、直視物体までの距離d1に応じて求めた電波の下向き送信角度の最適範囲を、送信アンテナ16の可動範囲の最大値により制限する。このように電波の下向き送信角度の最適範囲を制限すると、直視物体までの距離d1によっては、直視物体に近い位置に背後物体を検知できない検知不可領域が生じる。そこで、このような検知不可領域が生じた場合には、第4のパルス検知領域補正部41によりパルス検知領域を補正して、検知不可領域をパルスモードでの物体検知の対象から除外する。
【0077】
第4のパルス検知領域補正部41は、最適下向き角度範囲算出部40で算出された角度範囲と、FMCWモード物体検知部31からの物体情報(直視物体までの距離)とに基づいて、電波の下向き送信角度の制限により背後物体を検知できない検知不可領域が生じているか否かを判定する。そして、検知不可領域が生じている場合には、この検知不可領域をパルス検知領域から除外するように、パルス検知領域設定部33により設定されたパルス検知領域を補正する。また、第4のパルス検知領域補正部41は、送信部10から電波信号を送信している方向の道路の傾斜を道路情報から把握し、道路の傾斜により路面反射した電波が遮断されて背後物体を検知できない検知不可領域が生じているか否かを判定する。そして、このような検知不可領域が生じている場合にも、この検知不可領域をパルス検知領域から除外するように、パルス検知領域設定部33により設定されたパルス検知領域を補正する。
【0078】
次に、以上のように構成される本実施形態の障害物検出装置の動作について、図21のフローチャートを参照しながら説明する。図21のフローチャートは、本実施形態の障害物検出装置におけるコントローラ30によって所定周期ごとに繰り返し実行される障害物検出処理の流れを示したものであり、図6に示した第1の実施形態での処理に加え、ステップS601〜ステップS603の処理を追加したものである。なお、ステップS101〜ステップS108の処理は第1の実施形態と同様であるため、説明を省略する。
【0079】
本実施形態では、ステップS105においてパルス検知領域を設定した後、コントローラ30が、ステップS601において、送信部10をパルスモードで動作させる際の電波信号の下向き送信角度の最適範囲を算出する(最適下向き角度範囲算出部40)。次に、コントローラ30は、ステップS602において、電波の下向き送信角度が制限されることにより背後物体を検知できない検知不可領域、或いは道路の傾斜で電波が遮断されることにより背後物体を検知できない検知不可領域が存在するか否かを判定する。そして、検知不可領域が存在すると判断した場合は、次のステップS603において、検知不可領域を除外するようにパルス検知領域を補正してステップS106に進む。一方、検知不可領域が存在しないと判断した場合には、そのままステップS106に進む(第4のパルス検知領域補正部41)。なお、本実施形態では、ステップS106において、パルスモードで送信部10を動作させる際に、パルス変調した電波信号の下向き送信角度の角度範囲がステップS601で算出した最適範囲となるように、電波信号の送信を制御する。
【0080】
以上、具体的な例を挙げながら説明したように、本実施形態の障害物検出装置によれば、送信部10をパルスモードで動作させる際の電波信号の下向き送信角度が最適範囲となるように制御しているので、パルスモードでの物体検知において路面反射を利用した背後物体の検知を効率良く行うことができる。
【0081】
また、本実施形態の障害物検出装置によれば、パルス検知領域内に路面反射を利用した背後物体の検知ができない検知不可領域が存在するか否かを判定し、検知不可領域が存在すると判断した場合には、パルス検知領域を補正して検知不可領域を除外するようにしているので、パルスモードでの物体検知処理をより効率的に行うことが可能となる。
【0082】
なお、以上説明した本発明の実施形態は、本発明の一適用例を例示的に示したものであり、本発明の技術的範囲が上記の実施形態として開示した内容に限定されることを意図するものではない。つまり、本発明の技術的範囲は、上記の実施形態で開示した具体的な技術事項に限らず、この開示から容易に導きうる様々な変形、変更、代替技術なども含むものである。
【符号の説明】
【0083】
10 送信部
11 キャリア周波数発振器
12 変調周波数発振器
13 結合器
14 パルス発生器
15 パルス変調回路
16 送信アンテナ
20 受信部
21 受信アンテナ
22 結合器
23 高速フーリエ変換部(FFT)
24 検波増幅器
25 コンパレータ
31 FMCWモード物体検知部
32 影響判定部
33 パルス検知領域設定部
34 送信モード制御部
35 パルスモード物体検知部
36 第1のパルス検知領域補正部
37 検知物体同一性判定部
38 第2のパルス検知領域補正部
39 第3のパルス検知領域補正部
40 最適下向き角度範囲算出部
41 第4のパルス検知領域補正部
【特許請求の範囲】
【請求項1】
周波数変調した連続波の電磁波を送信すると共に、送信した電磁波に対応する反射波に基づいて物体を検知するFMCWレーダ部と、
パルス変調した電磁波を送信すると共に、送信した電磁波に対応する反射波に基づいて物体を検知するパルスレーダ部とを備え、
前記FMCWレーダ部により物体を検知した場合に前記パルスレーダ部による物体検知を行って、車両の走行の障害となる可能性のある障害物を検出することを特徴とする障害物検出装置。
【請求項2】
前記FMCWレーダ部で物体を検知したときに、当該物体の背後に隠れる物体背後領域が車両の走行に影響を与える可能性があるか否かを判定する影響判定手段と、
前記物体背後領域が車両の走行に影響を与える可能性があると判定されたときに、前記物体背後領域を含むように、前記パルスレーダ部による物体検知を行うパルス検知領域を設定するパルス検知領域設定手段とを備え、
前記パルスレーダ部は、前記パルス検知領域設定手段で設定したパルス検知領域を対象としてパルス変調した電磁波を用いた物体検知を行うことを特徴とする請求項1に記載の障害物検出装置。
【請求項3】
前記影響判定手段は、車両が走行車線から隣接車線へと車線変更しようとしている場合で、且つ、前記物体背後領域が車両の走行車線または隣接車線と重なる場合に、前記物体背後領域が車両の走行に影響を与える可能性があると判定することを特徴とする請求項2に記載の障害物検出装置。
【請求項4】
前記パルス検知領域設定手段は、前記FMCWレーダ部で検知された物体までの距離と車両の走行車線および隣接車線の車線幅とに基づいて前記パルス検知領域を設定することを特徴とする請求項2又は3に記載の障害物検出装置。
【請求項5】
車両の走行車線および隣接車線の道路形状に基づいて、前記パルス検知領域設定手段が設定したパルス検知領域を補正する第1の補正手段を備えることを特徴とする請求項2乃至4のいずれか一項に記載の障害物検出装置。
【請求項6】
前記パルス検知領域設定手段が設定したパルス検知領域内に電磁波の伝播を遮断する遮断物体が存在する場合に、前記遮断物体の背後の領域を除外するように、前記パルス検知領域設定手段が設定したパルス検知領域を補正する第2の補正手段を備えることを特徴とする請求項2乃至5のいずれか一項に記載の障害物検出装置。
【請求項7】
前記パルス検知領域設定手段が設定したパルス検知領域の近傍に位置する他の物体を前記FMCWレーダ部が検知したときに、前記パルス検知領域設定手段が設定したパルス検知領域を前記他の物体が含まれるように補正する第3の補正手段を備えることを特徴とする請求項2乃至6のいずれか一項に記載の障害物検出装置。
【請求項8】
前記影響判定手段は、車両が交差点に進入しようとしている場合で、且つ、前記物体背後領域が前記交差点に繋がる道路と重なる場合に、前記物体背後領域が車両の走行に影響を与える可能性があると判定することを特徴とする請求項2に記載の障害物検出装置。
【請求項9】
前記FMCWレーダ部で検知した物体までの距離と前記パルスレーダ部で物体検知を行う際の電磁波の下向き送信角度とに基づいて、前記パルスレーダ部での物体検知ができない検知不可領域があるか否かを判定し、検知不可領域がある場合に、当該検知不可領域を除外するように、前記パルス検知領域設定手段が設定したパルス検知領域を補正する第4の補正手段を備えることを特徴とする請求項2乃至8のいずれか一項に記載の障害物検出装置。
【請求項10】
前記FMCWレーダ部で検知した物体までの距離に基づいて、前記パルスレーダ部で物体検知を行う際の電磁波の最適下向き送信角度を算出する角度算出手段を備えることを特徴とする請求項1乃至9のいずれか一項に記載の障害物検出装置。
【請求項11】
前記パルスレーダ部は、一定周波数の信号をパルス変調した電磁波を用いて物体検知を行い、
前記FMCWレーダ部による物体検知と前記パルスレーダ部による物体検知とを時分割で切り替えることを特徴とする請求項1乃至10のいずれか一項に記載の障害物検出装置。
【請求項12】
前記パルスレーダ部は、前記FMCWレーダ部で用いる周波数変調信号をパルス変調した電磁波を用いて、前記FMCWレーダ部による物体検知と同時に物体検知を行うことを特徴とする請求項1乃至10のいずれか一項に記載の障害物検出装置。
【請求項1】
周波数変調した連続波の電磁波を送信すると共に、送信した電磁波に対応する反射波に基づいて物体を検知するFMCWレーダ部と、
パルス変調した電磁波を送信すると共に、送信した電磁波に対応する反射波に基づいて物体を検知するパルスレーダ部とを備え、
前記FMCWレーダ部により物体を検知した場合に前記パルスレーダ部による物体検知を行って、車両の走行の障害となる可能性のある障害物を検出することを特徴とする障害物検出装置。
【請求項2】
前記FMCWレーダ部で物体を検知したときに、当該物体の背後に隠れる物体背後領域が車両の走行に影響を与える可能性があるか否かを判定する影響判定手段と、
前記物体背後領域が車両の走行に影響を与える可能性があると判定されたときに、前記物体背後領域を含むように、前記パルスレーダ部による物体検知を行うパルス検知領域を設定するパルス検知領域設定手段とを備え、
前記パルスレーダ部は、前記パルス検知領域設定手段で設定したパルス検知領域を対象としてパルス変調した電磁波を用いた物体検知を行うことを特徴とする請求項1に記載の障害物検出装置。
【請求項3】
前記影響判定手段は、車両が走行車線から隣接車線へと車線変更しようとしている場合で、且つ、前記物体背後領域が車両の走行車線または隣接車線と重なる場合に、前記物体背後領域が車両の走行に影響を与える可能性があると判定することを特徴とする請求項2に記載の障害物検出装置。
【請求項4】
前記パルス検知領域設定手段は、前記FMCWレーダ部で検知された物体までの距離と車両の走行車線および隣接車線の車線幅とに基づいて前記パルス検知領域を設定することを特徴とする請求項2又は3に記載の障害物検出装置。
【請求項5】
車両の走行車線および隣接車線の道路形状に基づいて、前記パルス検知領域設定手段が設定したパルス検知領域を補正する第1の補正手段を備えることを特徴とする請求項2乃至4のいずれか一項に記載の障害物検出装置。
【請求項6】
前記パルス検知領域設定手段が設定したパルス検知領域内に電磁波の伝播を遮断する遮断物体が存在する場合に、前記遮断物体の背後の領域を除外するように、前記パルス検知領域設定手段が設定したパルス検知領域を補正する第2の補正手段を備えることを特徴とする請求項2乃至5のいずれか一項に記載の障害物検出装置。
【請求項7】
前記パルス検知領域設定手段が設定したパルス検知領域の近傍に位置する他の物体を前記FMCWレーダ部が検知したときに、前記パルス検知領域設定手段が設定したパルス検知領域を前記他の物体が含まれるように補正する第3の補正手段を備えることを特徴とする請求項2乃至6のいずれか一項に記載の障害物検出装置。
【請求項8】
前記影響判定手段は、車両が交差点に進入しようとしている場合で、且つ、前記物体背後領域が前記交差点に繋がる道路と重なる場合に、前記物体背後領域が車両の走行に影響を与える可能性があると判定することを特徴とする請求項2に記載の障害物検出装置。
【請求項9】
前記FMCWレーダ部で検知した物体までの距離と前記パルスレーダ部で物体検知を行う際の電磁波の下向き送信角度とに基づいて、前記パルスレーダ部での物体検知ができない検知不可領域があるか否かを判定し、検知不可領域がある場合に、当該検知不可領域を除外するように、前記パルス検知領域設定手段が設定したパルス検知領域を補正する第4の補正手段を備えることを特徴とする請求項2乃至8のいずれか一項に記載の障害物検出装置。
【請求項10】
前記FMCWレーダ部で検知した物体までの距離に基づいて、前記パルスレーダ部で物体検知を行う際の電磁波の最適下向き送信角度を算出する角度算出手段を備えることを特徴とする請求項1乃至9のいずれか一項に記載の障害物検出装置。
【請求項11】
前記パルスレーダ部は、一定周波数の信号をパルス変調した電磁波を用いて物体検知を行い、
前記FMCWレーダ部による物体検知と前記パルスレーダ部による物体検知とを時分割で切り替えることを特徴とする請求項1乃至10のいずれか一項に記載の障害物検出装置。
【請求項12】
前記パルスレーダ部は、前記FMCWレーダ部で用いる周波数変調信号をパルス変調した電磁波を用いて、前記FMCWレーダ部による物体検知と同時に物体検知を行うことを特徴とする請求項1乃至10のいずれか一項に記載の障害物検出装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【公開番号】特開2010−181257(P2010−181257A)
【公開日】平成22年8月19日(2010.8.19)
【国際特許分類】
【出願番号】特願2009−24620(P2009−24620)
【出願日】平成21年2月5日(2009.2.5)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
【公開日】平成22年8月19日(2010.8.19)
【国際特許分類】
【出願日】平成21年2月5日(2009.2.5)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
[ Back to top ]