
障害物検出装置
【課題】車両周辺の障害物の位置・形状及びスペースを広範囲かつ正確に検出すること。
【解決手段】アレイ状に配置された素子から送信波を送信し、障害物での反射波を各素子で受信する。その受信信号を受信した時間から障害物の距離を算出し、各素子の受信信号の位相差から障害物の方向を算出する。また、広範囲で障害物を検出するために、各素子に入力する送信信号の位相差を適宜変えて、送信波の合成指向性を制御するとともに、各素子の受信信号に乗算する係数を適宜変えて、受信波の合成指向性を制御する。特に、隣接素子間に位相差を同相、逆相交互に設定することで、指向性を狭角、広角と交互に切り替え、広範囲の障害物の位置検出を可能とする。さらに、移動しながら検出した位置情報から、車両走行経路周辺の障害物の位置・形状及びスペースの認識を可能とする。
【解決手段】アレイ状に配置された素子から送信波を送信し、障害物での反射波を各素子で受信する。その受信信号を受信した時間から障害物の距離を算出し、各素子の受信信号の位相差から障害物の方向を算出する。また、広範囲で障害物を検出するために、各素子に入力する送信信号の位相差を適宜変えて、送信波の合成指向性を制御するとともに、各素子の受信信号に乗算する係数を適宜変えて、受信波の合成指向性を制御する。特に、隣接素子間に位相差を同相、逆相交互に設定することで、指向性を狭角、広角と交互に切り替え、広範囲の障害物の位置検出を可能とする。さらに、移動しながら検出した位置情報から、車両走行経路周辺の障害物の位置・形状及びスペースの認識を可能とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば、駐車支援するために、駐車可能エリアを認識するのに使用される車両周辺の障害物を検出する装置に関する。
【背景技術】
【0002】
一般に、例えば、車両を所定の駐車エリアに駐車させる際の運転操作は、各種運転操作の中でも難易度の高い運転操作の一つである。そのため、従来より、駐車操作を支援する装置が各種提案されている。
【0003】
例えば、特許文献1に記載の装置は、障害物の距離を計測する距離センサを用いて、駐車可能エリアを認識する。そして、その認識した駐車可能エリアに駐車する際の、車両の移動軌跡を計算し表示する。
【0004】
しかし、例えば超音波センサなどの距離センサを用いた場合、指向性が広くなるため、障害物が距離センサの真横に到達する前から障害物を検出してしまい、また、障害物を通過した後も障害物を検出してしまうことが起こる。したがって、認識した駐車可能エリアは、実際の駐車可能エリアと誤差が生ずる。
【0005】
この問題を解決するために、特許文献2に記載の装置は、距離センサによる検出距離と、その検出距離における進行方向の誤差との関係を予め計測しておき、補正幅テーブルとして格納しておく。そして、駐車可能エリア検出における駐車幅の測定において、検出した距離に応じた補正幅を補正値として使用している。
【0006】
また、特許文献3の障害物検知装置では、検出した障害物の位置情報を記憶しておき、その位置情報を現在の車両との相対位置情報に更新している。これによって、障害物検出用のセンサの数を増加させることなく死角を減らすことができる。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開昭61−48098号公報
【特許文献2】特開2003−312414号公報
【特許文献3】特開2003−114276号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
上述したように、特許文献2に記載の装置を用いて、駐車可能エリアを検出するには、正確に距離センサによる検出距離と、その検出距離における進行方向の誤差との関係を計測しておく必要がある。
【0009】
しかしながら、障害物の形状、材質に起因し、障害物の反射率が異なるため、実際は、障害物の形状、材質が異なると、障害物の検出可能範囲も異なってしまう。すなわち、障害物の形状、材質が異なると、距離センサによる検出距離と、その検出距離における進行方向の誤差との関係も異なる。したがって、特許文献2に記載の装置では、どのような障害物に対しても正確な位置を検出することが難しい。
【0010】
また、特許文献3についても同様に、距離センサを用いているので、障害物の正確な位置を検出することができない。特に、駐車可能なスペースを検出したり、狭いスペースを車両が通過するときのように、正確な障害物の検出が要求される場合には、適用することは困難である。
【0011】
本発明は以上の問題点に鑑みてなされたものであり、障害物の種類にかかわらず、障害物の位置や形状を検出でき、駐車可能なスペース、移動可能なスペースを正確に検出できる障害物検出装置を提供することを目的とする。
【課題を解決するための手段】
【0012】
上記目的を達成するために、請求項1の障害物検出装置は、車両に設置され、アレイ状に配置された複数の素子と、前記アレイ状に配置された各素子に送信信号を入力して、前記車両周辺に向けて所定の指向性を有する送信波を送信する送信手段と、前記アレイ状に配置された各素子で前記車両周辺に存在する障害物で反射した反射波を受信し、反射波の有無を判定する受信手段と、前記受信手段が、前記送信手段が送信した送信波の反射波を受信したと判定した場合、当該反射波を受信した時間と前記送信手段が送信波を送信した時間との差に基づいて、障害物の距離を算出し、前記各素子で受信した反射波の位相差に基づいて、前記障害物の方向を算出する位置検出手段と、前記各素子の当該車両の所定の基準位置に対する取り付け位置を記録する取り付け位置記録手段と、前記取り付け位置記録手段が記録した前記各素子の当該車両の所定の基準位置に対する取り付け位置に基づいて、前記位置検出手段が算出した前記障害物の位置情報を、前記車両の所定の基準位置に対する障害物の位置情報に変換する変換手段と、前記変換手段が変換した障害物位置情報を、時刻に対応付けて記憶する障害物位置情報記憶手段と、前記車両が走行しているときに、前記車両の所定の基準位置の移動軌跡を時刻に対応付けて記録する移動軌跡記録手段と、前記障害物位置情報記憶手段が記憶した各時刻の障害物の位置情報と、前記移動軌跡記録手段が記録した前記所定の基準位置の移動軌跡とに基づいて、現在の時刻における前記車両の所定の基準位置を基準とした、前記車両の走行経路周辺の障害物の位置及び形状、障害物の無いスペースを認識する認識手段と、前記認識手段が認識した障害物とを報知する位置報知手段とを備えることを特徴とする。
【0013】
これによって、障害物の距離だけでなく、方向も検出することができる。つまり、障害物の位置を正確に検出することができる。また、特許文献2のような補正値を用いる必要がないので、どのような障害物に対しても正確な位置を検出することができる。
【0014】
また、車両の所定の基準位置(例えば、車両の中心点)の移動軌跡を認識する方法としては、例えば、車両の速度を検出する車速センサや、車両の方位を検出する地磁気センサ、ジャイロスコープや、ステアリング角度を検出するセンサなどを用いて認識する。また、各素子の車両の所定の基準位置に対する取り付け位置情報として、例えば、車両中心を原点とした場合の3次元座標と姿勢を記録する。
【0015】
これにより、車両が走行中において検出した障害物の位置情報を基にして、車両が走行した経路周辺の状況を認識することができる。また、障害物の位置情報を車両の所定の基準位置を基準とした位置情報に変換しているので、例えば車両前部、後部など車両の複数箇所に素子を取り付けて障害物を検出する場合に、複数の位置情報を統合して取り扱うことができる。
【0016】
また、ドライバーは車両周囲に障害物を把握することができる。また、現在地からでは障害物を検出する範囲外となっていても、それまでにその障害物を検出しておれば、その障害物についても報知されることになる。よって、そのような障害物についても確実に接触を回避することができる。
【0017】
また、請求項2のように各素子で受信した反射波の時間差に基づいて、障害物の方向を算出してもよい。
【0018】
請求項3の障害物検出装置は、前記位置報知手段は、画面を備え、当該画面に前記車両を示す画像を表示するとともに、当該車両を示す画像を表示する位置を現在地として前記車両の走行経路周辺の障害物を表示することを特徴とする。これによって、ドライバーは一見して車両周囲の状況を把握することができる。
【0019】
請求項4の障害物検出装置は、前記位置報知手段は、前記認識手段が新たに障害物を認識する度に、当該障害物を前記画面に追加表示することを特徴とする。これによって、ドライバーは障害物の形状など車両周囲の状況を把握することができる。
【0020】
請求項5の障害物検出装置は、前記位置報知手段は、前記車両を示す画像及び障害物を鳥瞰図として表示することを特徴とする。これによって、ドライバーは車両と障害物との位置関係を容易に把握することができる。
【0021】
請求項6の障害物検出装置は、前記車両周辺を撮像する撮像手段と、前記撮像手段が撮像した車両周辺画像を鳥瞰画像に変換する鳥瞰画像変換手段とを備え、前記位置報知手段は、前記鳥瞰画像変換手段が変換した鳥瞰画像を前記鳥瞰図にさらに重ねて、前記車両を示す画像及び障害物を表示することを特徴とする。これにより、ドライバーは車両周囲の実際の状況を把握することができるとともに、特に駐車可能スペースを検出する際には正確に障害物が検出できているか否かを確認することができる。
【0022】
請求項7の障害物検出装置は、前記位置報知手段は、前記障害物を点滅表示することを特徴とする。実際の車両周辺画像(鳥瞰画像)に検出した障害物を重ねて表示すると、それによって実際の車両周辺の状況が把握し辛くなることが予想される。そこで、請求項7では、表示する障害物を点滅させて、このような問題点を防いでいる。
【図面の簡単な説明】
【0023】
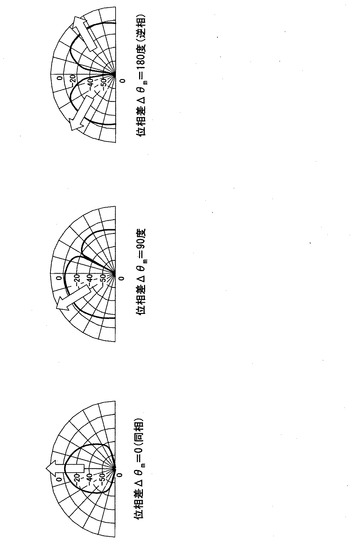
【図1】各素子に入力する送信信号の位相差に対応する、送信波の全素子合成指向性を示す図である。
【図2】各素子で受信した復調信号をIQ平面上に表した図と(同図(a))、この信号に複素係数を乗算して各信号の位相を揃えたことを示している図である。
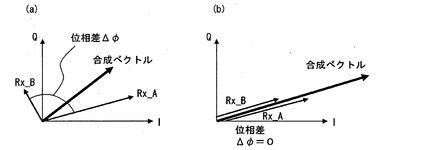
【図3】各復調信号に複素係数乗算後の信号をベクトル加算した信号の、受信信号が障害物の反射波であるか否かの閾値判定を示す図(同図(a))と、ベクトル加算後信号が閾値を越えた部分の複数のサンプルポイントにおいて算出した各素子の受信信号の位相差ベクトル及びそれらを合成したベクトルを示す図(同図(b))である。
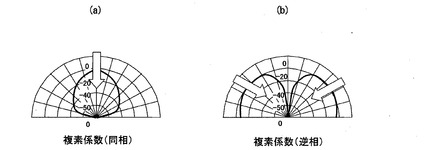
【図4】各素子で受信した信号に乗算する複素係数の位相差に対応する合成受信指向性を示している図である。
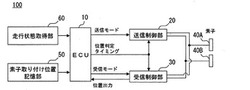
【図5】第1実施形態の障害物検出装置100の全体構成を示すブロック図である。
【図6】アレイ状に配置された2つの素子を示す図である。
【図7】送信制御部20の構成を示すブロック図である。
【図8】受信制御部30の構成を示すブロック図である。
【図9】各復調信号に複素係数乗算後の信号をベクトル加算した信号の時間変化を示す図(同図(a))と、これに対応する各素子の受信信号の位相の時間変化を示す図(同図(b))である。
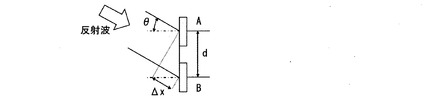
【図10】間隔dで配置された2素子に、θ方向から反射波が到来したことを示す図である。
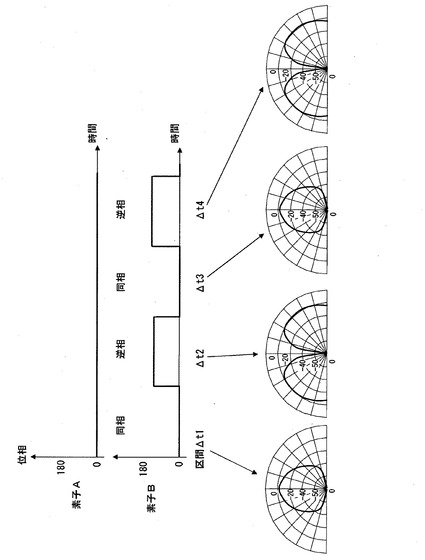
【図11】各素子に入力する送信信号の位相を同相と逆相を交互に切り替えて、送信波の合成指向性を狭角と広角を交互に切り替えていることを示す図である。
【図12】走行中において、車両側方の障害物を各時刻毎で検出したことを示す図である。
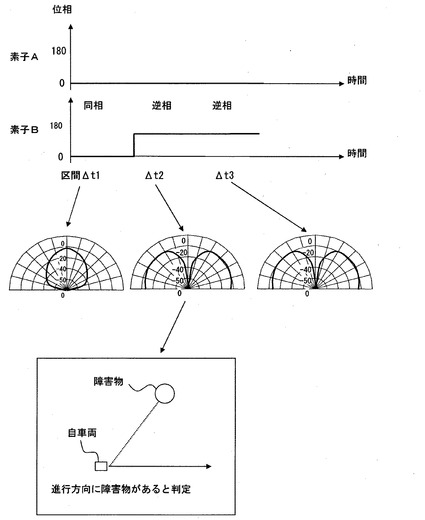
【図13】指向性を障害物の位置に応じて切り替えていることを説明するための図である。
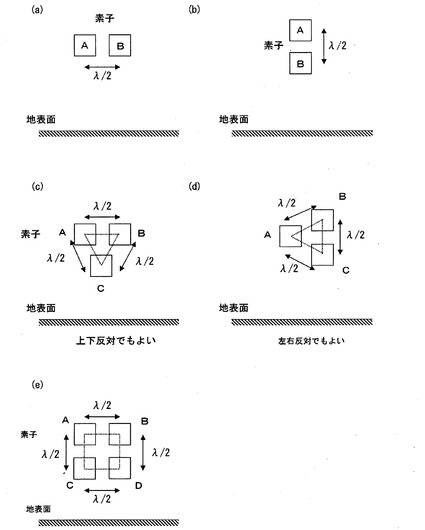
【図14】素子の配置例を示す図である。
【図15】送信波の合成指向性を説明するために、基準軸と空間の任意の位置との関係を示した図である。
【図16】複数のサンプルポイントの位相差ベクトルを加算することで各素子の受信信号の位相差を算出することを説明するための図である。
【図17】第2実施形態の障害物検出装置200の全体構成を示す図である。
【図18】3次元で位置検出する例を示す図である。
【図19】素子間隔dが0.5λ以上の場合における、送信波の指向性を示す図である。
【図20】素子間隔dが0.5λよりも大きい場合には、反射波の各素子の位相差によっては、物体の位置が一意に定まらないことを説明するための図である。
【図21】検出した障害物を累積表示する際の処理を示したフローチャートである。
【図22】車両が狭いスペースを通過する際における、検出した障害物の表示例を示した図である。
【図23】駐車可能スペースを認識する際における、検出した障害物の表示例を示した図である。
【図24】車両を後進させて並列駐車する際における、検出した障害物の表示例を示した図である。
【図25】検出した障害物を、車両周辺の鳥瞰画像に重ねて表示する際の処理を示したフローチャートである。
【図26】検出した障害物を、車両周辺の鳥瞰画像に重ねて表示した例図である。
【図27】車両の予想走行経路周辺の障害物のみを表示することを説明するための図である。
【図28】不感帯で検出した反射波を破棄するための閾値を示した図である。
【発明を実施するための形態】
【0024】
(第1実施形態)
以下、本発明の第1の実施形態について説明する。
【0025】
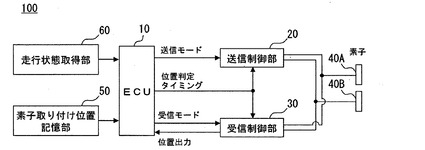
図5は、本実施形態の障害物検出装置100の全体構成を示すブロック図である。同図に示すように、障害物検出装置100は、送信制御部20、受信制御部30、素子40A、40B、素子取り付け位置記憶部50、走行状態取得部60及びECU10から構成される。
【0026】
ECU10は、通常のコンピュータであり、図示しないROM、RAM、CPU、I/O、及びこれらを接続するバスによって構成される。障害物を検出する際には、このECU10は、送信制御部20に対して、所定のタイミングで車両外部に送信波を送信するように指示する。また、ECU10は、受信制御部30に対して、障害物の位置情報を自身に送信するように指示する。そして、後述する素子取り付け位置記憶部50に記憶されている各素子の車両の中心点を基準とした位置情報に基づいて、受信制御部30から送られてきた障害物の位置情報を、車両の中心点を基準とした位置情報に変換し、時刻に対応付けてRAMに記憶しておく。そして、後述する走行状態取得部60に基づいて算出される車両の中心点の移動軌跡に基づいて、このRAMに記憶した位置情報を、現在地を基準とした相対位置に変換し、現在地を基準として、走行経路周辺にどの位置にどのような形状の障害物があるか、障害物のないスペースはどの程度あり、移動可能なスペースがどのくらいあるかを認識する。
【0027】
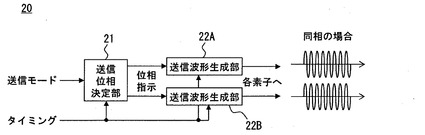
送信制御部20は、ECU10の送信指示に基づいて、所定の送信信号を生成して、各素子(40A、40B)に出力する部分である。具体的には、図7に示すように、送信位相決定部21、送信波形生成部22A、22Bから構成される。
【0028】
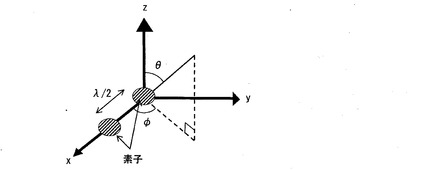
送信位相決定部21は、素子40A、40Bのそれぞれに入力する送信信号の位相を決定し、送信波形生成部22A、22Bに指示する。本実施形態では、送信波の指向性を狭角と広角を交互に切り替わるように、各素子に入力する送信信号の位相を決定している。本実施形態では、後述するように、素子40A、40Bは、送信波の波長λに対して、半波長(λ/2)の間隔で配置されており、この場合、送信波の2次元平面(φ=0)の指向性E(θ、φ)は、次式のように表される。なお、次式中、θ、φは、図15のように空間に原点と基準軸を設けたときの、任意の点における、その任意の点と原点とを結んだ直線と基準軸との角度を表しており、また、E0(θ、φ)は各素子単体の指向性、Δθmは各素子に入力する送信信号の位相差を表している(各素子に入力する送信信号の位相差をΔθmとするため、θ0=0、θ1=Δθmとしている)。
【0029】
(数4)
E(θ、φ)=E0(θ、φ)×[1+exp{j(π×sinθ+Δθm)}]
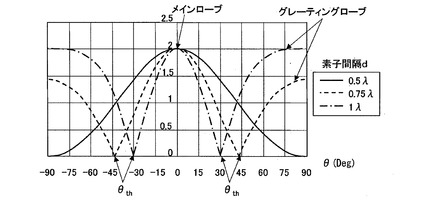
ここで、指向性E(θ、φ)を狭角にするには、各素子に入力する送信信号の位相差Δθmを0(同相)とし、指向性E(θ、φ)を広角にするには、各素子に入力する送信信号の位相差Δθmを180度(逆相)とすればよい。したがって、送信波の指向性を狭角と広角を交互に切り替えるには、図11に示すように、各素子に入力する送信信号の位相を同相と逆相を交互に切り替えればよい。つまり、送信位相決定部21は、送信波形生成部22A、22Bに対して、交互に、同相の位相と逆相の位相を指示している。
【0030】
送信波形生成部22A、22Bは、送信位相決定部21からの指示に基づいて、所定位相、所定周波数の正弦波を生成し、それをパルス変調した信号を送信信号として、各素子に入力する。
【0031】
素子40A、40Bは、図6に示すように、送信波の波長λに対して、半波長λ/2の間隔で、アレイ状に配置されており、送信波形生成部22A、22Bから送信された送信信号に応じた送信波を外部に送信する。素子40A、40Bとして、具体的には、超音波を発生する超音波マイクや、電波を発生するアンテナが挙げられる。また、素子40A、40Bは、外部から到来する信号を受信し、この受信信号を受信制御部30に送信する。
【0032】
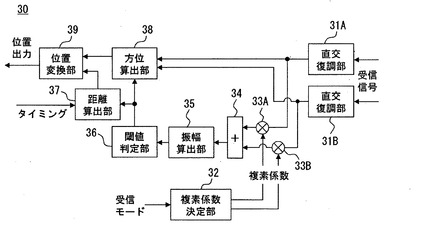
受信制御部30は、素子40A、40Bから送られてきた信号に基づいて、その信号が障害物の反射波であるか否かを判定し、反射波であると判定したときは、その反射波に基づいて障害物の位置を算出する部分である。具体的には、図8に示すように、直交復調部31A、31B、複素係数決定部32、乗算部33A、33B、加算部34、振幅算出部35、閾値判定部36、距離算出部37、方位算出部38、位置変換部39から構成される。
【0033】
直交復調部31A、31Bは、素子40A、40Bから送られてきた信号を直交復調する部分である。具体的には、素子40A、40Bから送られてきた信号に、所定の各周波数の正弦波ならびに余弦波を掛け合わせ、ローパスフィルタにより高周波成分を除去し、同相成分(I)と直交成分(Q)を抽出する。この操作はAD変換後に行ってもよいし、直交復調後にAD変換し、ディジタル値に変換してもよい。この直交復調信号を、同相成分(I)と直交成分(Q)の信号からなる複素平面(IQ平面)に表すと、図2(a)示すように、所定の大きさ、位相をもつベクトルとして表すことができる。
【0034】
複素係数決定部32は、各素子の直交復調後の信号に乗算する複素係数を決定する部分である。この複素係数の値によって、受信指向性を変えることができる。本実施形態では、送信指向性と同じ指向性となるように、この複素係数の値を決定している。つまり、受信指向性が狭角と広角が交互に切り替わるように、複素係数の位相を同相と逆相を交互に切り替えている。
【0035】
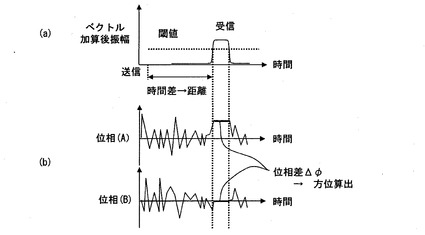
そして、乗算部33A、33Bで、各復調信号に複素係数決定部32で決定した複素係数を乗算して、各復調信号の位相差を変え、これらを加算部34でベクトル加算する。その後、ベクトル加算後の信号の振幅を振幅算出部35で算出し、この振幅が閾値よりも大きいか否かを閾値判定部36で判定する。すなわち、ベクトル加算後の信号の振幅が閾値よりも大きいときには、受信信号が障害物からの反射波であると判定し、距離算出部37、方位算出部38によってその反射波に対応した障害物の位置を算出する。具体的には、距離算出部37は、受信信号のベクトル加算後振幅が閾値を越えたときの時間と、送信波を送信したときの時間との時間差から(図9(a)参照)、障害物の距離を算出する。
【0036】
また、方位算出部38は、ベクトル加算後の信号の振幅が閾値を越えた部分の、各復調信号の位相差に基づいて、方位を算出する(図9(b)参照)。具体的には、図10に示すように、2素子間の距離をd、各復調信号の位相差をΔφ、反射波の波長をλとすると、反射波の到来方向θは、次式のように表される。
【0037】
(数5)
θ=sin−1(Δφ×λ/(2π×d))
上式に、反射波の波長λ(送信波の波長λと同じ)と、2素子間の距離d(λ/2)を代入し、各復調信号の位相差Δφを算出すれば、反射波の到来方向θを算出することができる。
【0038】
ここで、各復調信号の位相差Δφを算出するために、先ず、ベクトル加算後の信号の振幅が閾値を越えた部分の複数のサンプルポイントにおいて、次式に示す、受信信号の大きさを反映した、各復調信号の位相差を示す位相差ベクトルDefを算出する。なお、次式中、X、Yは、各復調信号の強度を表しており、φ1、φ2は、各復調信号の位相を表している。
【0039】
(数6)
Def=X×Y×exp(j(φ1―φ2))=X×Y×exp(j(Δφ))
ここで、各復調信号Rx_A、Rx_Bをそれぞれ、次式のように、同相成分(I)と直交成分(Q)の和で表す(図16(a)参照)。なお、次式中、a+jb、c+jdは単位ベクトルである。
【0040】
(数7)
Rx_A→X×exp(jφ1)=X×(a+jb)=(X×a)+j(X×b)
(数8)
Rx_B→Y×exp(jφ2)=Y×(c+jd)=(Y×c)+j(Y×d)
これらの数式を上記数式6に代入し、位相差ベクトルDefの同相成分Def_Iと直交成分Def_Qはそれぞれ次式のように表される。
【0041】
(数9)
Def_I=(X×a)×(Y×c)+(X×b)×(Y×d)
(数10)
Def_Q=(X×b)×(Y×c)―(X×a)×(Y×d)
したがって、各復調信号の成分を上記数式9、10に代入することにより、位相差ベクトルDefを算出することができる(図16(b)参照)。そして、各サンプルポイントにおいて算出した位相差ベクトルを加算して、合成位相差ベクトルSum_Defを算出し(図16(c)参照)、この合成位相差ベクトルSum_Defの位相から、障害物の方向を算出するための、各復調信号の位相差Δφを算出する。このように、受信信号の大きさを反映した位相差ベクトルを合成することで、受信信号の大きさを重みとしてもつ位相差の平均が可能となり、正確に位相差Δφを算出することができる。このΔφに基づき(数5)から反射波の到来方向θを算出する。
【0042】
位置変換部39は、距離算出部37で算出した障害物の距離情報及び、方位算出部で算出した障害物の方向情報とから、障害物の位置を示す座標情報に変換する部分である。本実施形態では、2つの素子40A、40Bを用いているので、各素子が属している平面上の2次元座標に変換する。そして、位置変換部39は、ECU10からの位置情報要求指示に基づいて、障害物の位置情報をECU10に送信する。
【0043】
素子取り付け位置記憶部50は、素子40A、40Bの車両に対する取り付け位置情報を記憶する部分である。本実施形態では、車両中心点を原点としたときの、3次元座標と姿勢を記憶している。
【0044】
走行状態取得部60は、車速センサ、地磁気センサ、ジャイロスコープや、ステアリング角度などから、車両の各時刻における車速、方位を示す走行状態を取得する部分である。
【0045】
ECU10は、障害物を検出する際には、走行状態取得部60から取得する走行状態に基づき、車両の中心点の移動軌跡を時刻に対応付けてRAMに記憶していく。また、受信制御部30から送られてきた障害物の位置情報を、車両の中心点を基準とした位置情報に変換し、時刻に対応付けてRAMに記憶しておく。このように、障害物の位置情報を車両の中心点を基準とした位置情報に変換しているのは、車両に取り付ける素子を素子40A、40Bだけでなく、他の箇所にも素子を取り付けて障害物を検出する場合に、複数の位置情報を統合して取り扱うためである。そして、RAMに記憶した車両中心点の移動軌跡に基づいて、RAMに記憶した各時刻に対応する障害物の位置情報を、現在地を基準とした位置に変換する。つまり、ECU10は、図12に示すように、各時刻で検出した障害物の位置情報を現在の時刻、位置を基準にして認識している。これによって、走行中において検出した複数の障害物の位置情報から障害物の形状を認識することができる。図12(a)のような棒状の障害物の場合は、一点として算出し、棒状の障害物として認識でき、図12(b)のような平面状の障害物の場合、移動に応じて異なる点を算出し、障害物が平面状であることを認識できる。具体的には、例えば縦列駐車時のスペースを検索する用途で使用した場合、図12(c)のように、駐車車両の形状を検出し、駐車に使用できるスペースを検索することができる。同様に並列駐車スペース検索に適用した場合でも図12(d)のように、駐車車両の形状を検出し、駐車に使用できるスペースを検索し、スペース有無の判定や、自動駐車の目標位置設定に使用することができる。なお、素子40A、40Bを、車両の側面に、車両の進行方向に対して直交する方向に主放射方向を向けるように取り付ければ、遠方までの駐車スペースを検索することができる。
【0046】
以上、本実施形態の障害物検出装置100は、アレイ状に配置された素子を用いることで、障害物の距離だけでなく、方向も検出することができる。つまり、障害物の位置を正確に検出することができる。また、各素子に入力する送信信号の位相を、同相と逆相に交互に切り替えることによって、送信波の指向性を狭角と広角の交互に切り替えている。一方、受信指向性についても、送信指向性と同じ指向性となるように、各素子で受信した受信信号に乗算する複素係数の位相を同相と逆相に交互に切り替えている。これによって、広範囲で障害物を検出することができる。さらに、走行中において検出した障害物の位置情報を、現在の位置を基準に変換しているので、当該走行経路周辺の障害物の状況を現在地に対する位置として認識することができる。これによって、例えば、この障害物検出装置100を駐車を支援するために用いるときには、車両周辺の障害物の状況と、駐車可能、移動可能なスペースを正確に認識することができる。
【0047】
(変形例1)
上記実施形態では、障害物を広範囲で検出するために、送受信指向性を狭角と広角の交互に切り替えているが、これに限定されることはなく、用途などに応じてどのように送受信指向性を制御してもよい。また、例えば、図13に示すように、障害物を検出するまでは、指向性を狭角と広角の交互に切り替え、障害物を検出したときは、それ以降はその障害物の位置に応じて、指向性を制御してもよい。これによって、車両が走行していても、障害物に追従できるので、障害物の位置を正確に検出することができる。
【0048】
(変形例2)
上記実施形態のように、2つの素子をアレイ状に配置することにより、障害物の位置を、その2素子が属している平面上の2次元位置として算出することができる。通常、障害物は道路上に位置しているので、図14(a)、(b)に示すように、2素子を地表面に対して水平、又は垂直に配置するのが望ましい。2素子を地表面に対して水平に配置した場合(同図(a))、指向性を狭角、広角に切り替えることにより、地表面に対して水平方向に広範囲に障害物の位置を検出することができる。同様に、2素子を地表面に対して垂直に配置した場合(同図(b))は、地表面に対して垂直方向に広範囲に障害物の位置を検出することができる。
【0049】
また、図14(c)、(d)に示すように、3素子を三角形状に配置することにより、障害物の3次元位置を検出することができる。同図(c)のように、3素子で構成される三角形の一辺が地表面に対して水平となるように配置し、その一辺を構成する素子の組(素子A、B)について位相差を切り替え、指向性を適宜切り替えることにより、水平方向に広範囲に障害物の位置を検出することができる。また、素子A、Cの組とB、Cの組で検出する方位情報から、障害物の地表面に対して垂直方向の位置情報を算出できる。つまり、障害物の3次元位置を検出することができる。同様に、同図(d)のように、3素子で構成される三角形の一辺が地表面に対して垂直となるように配置し、その一辺を構成する素子の組(素子B、C)について位相差を切り替え、指向性を適宜切り替えることにより、垂直方向に広範囲に障害物を検出することができる。さらに、同図(c)、(d)のように、3素子で構成される三角形が正三角形となるようにその3素子を配置することにより、3つの素子で囲まれる領域をコンパクトにすることができ、小型化できる。
【0050】
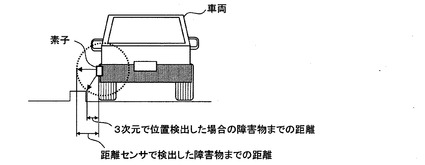
また、図14(e)に示すように、4素子を一辺が地表面に対して水平となうように、正方形状に配置すれば、水平に配置された素子の組によって、水平方向に広範囲に障害物の位置を検出できるとともに、垂直に配置された素子の組によって、垂直方向にも広範囲に障害物の位置を検出できる。また、素子を4つ用いることで、水平方向について、A,B及びC,Dの2組、垂直方向について、A,C及びB,Dのそれぞれで方位を算出しその結果を合成することで、位置検出精度を向上することもできる。このように、3次元位置を検出できるため、図18のように、例えば縁石などの障害物までの距離を検知したい場合、従来の距離センサに対して、障害物までの距離を正確に検出することができる。また、3素子、4素子の場合に、水平に配置された素子の組のみの位相差を切り替え、水平方向のみ広範囲に検出してもよい。
【0051】
(変形例3)
上記実施形態では、走行中に障害物を検出した結果から車両周囲の状況をECU10が認識するのみであった。そこで、このECU10が認識した車両周囲の状況を、更新表示するようにしてもよい。具体的には、例えば図21のフローチャートを従って表示する。なお、同図に示す処理はECU10が行う。また、ECU10が認識した車両周囲の状況を更新表示するためには、ECU10に例えば液晶ディスプレイなどの表示装置を接続しておく必要がある。
【0052】
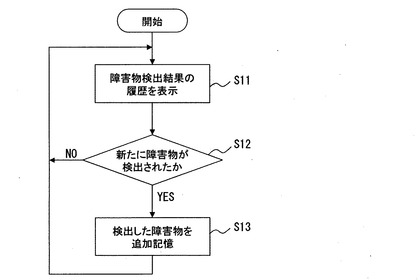
先ず、ステップS11において、画面に自車両を示す画像を表示するとともに、その自車両を示す画像を表示している位置を現在地として、現在ECU10が認識している障害物の検出結果をマーカー表示する。この際、それまでに複数の障害物の検出結果を記憶している場合は、それら全てが表示されることになる。
【0053】
次にステップS12において、新たに障害物が検出されたか否かを判定する。これは、受信制御部30から障害物の位置情報が送られてきたか否かによって判定する。ここで、新たに障害物が検出されていない場合は(否定判定)、再びステップS11に戻る。この際、車両の現在地に応じて、表示画面を更新する。一方、新たに障害物が検出された場合は(肯定判定)、ステップS13において、その検出結果を、上述したように車両の中心点を基準とした位置情報に変換し、時刻に対応付けてRAMに追加記憶する。その後、再びステップS11に戻り、その記憶した検出結果を追加して、RAMに記憶されている各障害物の検出結果の表示を更新する。このように検出結果が多くなるほど、それが表示画面に反映されることになるので、ドライバーは車両周囲の状況を認識しやすくなる。
【0054】
図22〜24は各状況ごとに障害物の検出結果を更新表示した例を示した図である。図22は、自車両の両側近傍に障害物があるような、狭いスペースを通過する際の表示例について示した図であるが、同図(a)の実際の状況に対して同図(b)のように障害物の検出結果がマーカー(円)で累積表示される。これによって、ドライバーは表示画面を確認することにより、自車両と障害物とがどれ程離れているのかを感覚的に把握することができる。したがって、狭いスペースを通過する際にも、障害物に接触することなく通過することができる。
【0055】
また、図23は、駐車可能スペースを認識する際の、その認識結果を表示した例を示した図であるが、同図(a)の実際の状況に対して同図(b)のように障害物の検出結果がマーカー(円)で累積表示される。これによって、ドライバーは正確に駐車可能スペースが認識されたか否かを把握することができる。
【0056】
また、図24は、駐車可能スペースに車両を後進させて並列駐車する際の、障害物の検出結果を表示した例を示した図であるが、同図(a)の実際の状況に対して同図(b)のように障害物の検出結果がマーカー(円)で累積表示される。これによって、ドライバーは両側の駐車車両に接触することなく、その駐車可能スペースに車両を駐車させることができる。
【0057】
(変形例4)
上記変形例3では、自車両を示す画像と障害物の検出結果のみを更新表示していた。しかし、この場合、表示されている障害物の検出結果が、実際のどの障害物に対応するのかを把握し辛い場合も想定される。そこで、実際の車両周辺の画像に重ねて、障害物の検出結果を更新表示するようにしてもよい。具体的には、例えば図25のフローチャートに従って表示する。なお、同図に示す処理はECU10が行う。また、車両周辺の画像を撮像するためのカメラを車両に設置して、ECU10に接続しておく必要がある。
【0058】
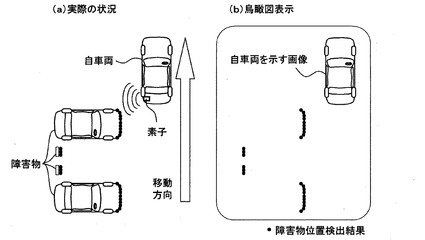
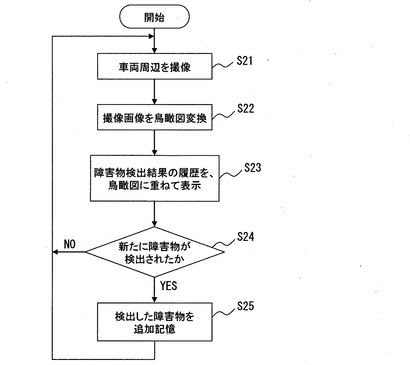
先ず、ステップS21において、そのカメラを用いて車両周辺を撮像する。次にステップS22において、その撮像した画像を鳥瞰画像に変換する。次にステップS23において、その変換した鳥瞰画像に重ねて、それまでに検出した障害物の検出結果を表示する。この際、自車両を示す画像も表示し、その表示位置を現在地として各障害物を表示する。例えば図26(a)に示す実際の状況に対しては、図26(b)のように表示される。
【0059】
次に、ステップS24において、新たに障害物が検出されたか否かを判定する。ここで、新たに障害物が検出されてない場合は(否定判定)、再びステップS21に戻る。この際、車両が移動した場合には、現在地を基準として障害物の検出結果が更新表示されることになる。一方、新たに障害物が検出された場合は、ステップS25において、その検出結果を、上述したように車両の中心点を基準とした位置情報に変換し、時刻に対応付けてRAMに記憶する。その後、再びステップS21に戻り、その記憶した検出結果を含めて、RAMに記憶されている障害物の検出結果の表示を更新する(ステップS21〜23)。
【0060】
このように、実際の車両周辺の鳥瞰画像に障害物の検出結果を重ねて表示することにより、どの障害物が検出されたのかを容易に把握することができる。
【0061】
また、障害物の検出結果を示すマーカーを常時鳥瞰画像に重ねて表示すると、その鳥瞰画像が把握し辛くなる可能性もある。そこで、そのマーカーを点滅表示させてもよい。
【0062】
(変形例5)
上記変形例3、4では、検出した障害物の位置にかかわらず同じマーカーで表示していた(図22〜図24、図26参照)。この場合であっても、自車両を示す画像も表示されているので、ドライバーは障害物が車両からどれくらい離れているのかを感覚的に把握することはできる。しかし、障害物が車両からどれくらい離れているのかを、さらに容易に把握できるようにするために、障害物の位置(車両からの距離や高さ)に応じて、マーカーの種類や色を変えるようにしてもよい。
【0063】
(変形例6)
上記変形例3〜5のように、検出した障害物を更新表示した場合、検出誤差によって実際の障害物との位置に対して、その誤差分だけ異なる位置で表示される可能性もある。そこで、検出した障害物をマーカーで表示する際には、そのマーカーにその検出誤差を加味したマージンを付加してもよい。すなわち、表示するマーカーを大きくする。これによって、車両が誤って障害物に接触してしまうことを防ぐことができる。
【0064】
(変形例7)
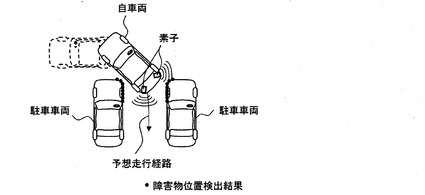
上記変形例3〜6では、ECU10が認識した障害物の検出結果を、表示画面に表示できる範囲で全て表示することを前提としていた。しかし、例えば図27に示すように、車両を後進させて並列駐車する場合、ドライバーにとっては駐車が完了するまでの走行経路周辺の障害物のみを把握できればよいと考えられる。そこで、あらかじめ車両の走行経路を予想し、その予想した走行経路周辺の障害物のみを表示するようにしてもよい。車両の走行経路を予想する方法としては、例えば車両の速度及び操舵角に基づいて予想したり、車両固有の最大操舵角に基づいて予想したりする。
【0065】
(変形例8)
上記変形例3〜7では、車両の周囲の状況をドライバーにより正確に把握させるために、走行中に検出した障害物を、表示画面に表示できるかぎりにおいて全て表示していた。しかし、ドライバーによっては、車両から遠く離れている障害物についてまで表示をすると、煩わしいと思う場合もあり得る。そこで、車両から所定範囲内の障害物のみを表示するようにしてもよい。または、車両から所定範囲内に障害物が近づいた場合には音で報知するようにしてもよい。
【0066】
また、車両から所定範囲内の障害物のみを報知しても、ドライバーはその報知を見落としたり、聞き漏らしたりする可能性もある。そこで、ECU10に車両の制動を制御する制動装置を接続し、車両の極近傍に障害物が入ってきたときには、車両を停止させるように、ECU10はその制動装置に指示を出してもよい。これによって、車両が障害物に接触することを確実に防ぐことができる。
【0067】
(変形例9)
上記変形例3〜8では、ECU10が走行中に検出した障害物を更新表示していた。しかし、ドライバーによっては障害物の位置の表示を必要としないと考える場合もあり得る。そこで、検出した障害物を表示するか否かをECU10に指示するスイッチを設けてもよい。
【0068】
(変形例10)
上記実施形態では、車両の走行中に検出した障害物の位置情報をRAMに記憶していた。つまり、車両が走行していることを前提としていた。しかし、車両を駐車場などに停車して、その後再走行する場合には、車両の近傍に障害物がある場合もある。そこで、停車前に認識した障害物の位置情報を保持するようにして、例えばドライバーが再乗車した際に、車両近傍に障害物がある旨を音で知らせたり、停車前に認識した障害物をそのまま表示するようにしてもよい。これにより、ドライバーは安心して走行を再開することができる。なお、この処理を行う前提として、ECU10は車両のエンジンオンオフを検知するセンサと接続されている必要がある。
【0069】
(変形例11)
例えば、送信波として超音波パルスを用いた場合、送信波が送信されたことによる残響が各素子にある時間内に反射波を受信しても、反射波が残響と重なってしまう。そのため、反射波の立ち上がりを正確に検出できないので、障害物の位置を正確に検出することは困難となる。そこで、反射波を受信したか否かの閾値として、図3に示す閾値の他に図28(a)に示すような不感帯用の閾値を設け、反射波の受信レベルが不感帯用の閾値を所定時間以上越えていたら不感帯で反射波を受信したと判定し、その反射波の情報を破棄するようにしてもよい。また、図3に示す閾値に替えて、図28(b)に示すように不感帯の領域の閾値を大きくした閾値を用いてもよい。これにより、結果的に不感帯の反射波は受信されなくなるからである。
(変形例12)
上記実施形態では、各素子40A、40Bで受信した反射波の位相差Δφから障害物の方向を算出していた(数5式参照)。しかし、この位相差Δφの代わりに、各素子40A、40Bで受信した反射波の時間差から障害物の方向を算出してもよい。
【0070】
(第2実施形態)
次に、本発明の第2の実施形態について説明する。
【0071】
本発明の障害物検出装置を、例えば、駐車支援のために、駐車可能エリア及びその周辺の状況を認識するために用いる場合、正確に障害物の位置を検出する必要がある。したがって、送信波を頻繁に送信し、できるだけ多くの障害物の位置情報を収集するのが望ましい。しかし、送信波を送信しその反射波を受信して位置を算出するまでには、ある程度の時間を要するので、位置検出周期(送信波の送信間隔)を小さくするのにも限度がある。このようなことから、本実施形態では、所定の位置検出周期と所用の検出精度を満足する距離間隔とから算出される制限速度を越えないように、車両の速度を制御するようにしたものである。
【0072】
図17は、本実施形態の障害物検出装置200の全体構成を示すブロック図である。なお、第1実施形態と同じ部品については、同一の符号を付している。同図に示すように、本実施形態の障害物検出装置200は、ECU10に車両の速度を制御する車速制御装置70が接続されている。この車速制御装置70は、例えば、ブレーキペダル及びアクセルペダルを制御する装置とから構成される。なお、障害物検出装置200の他の部品いついては、上述した第1実施形態と同様なので説明を省略する。
【0073】
この障害物検出装置200の動作について、ECU10は、障害物を検出するときには、走行状態取得部60から車両の速度情報を取得しつつ、車両の速度が上記制限速度になるように、車速制御装置70に指示する。これによって、所用の障害物の検出精度を実現することができる。
【0074】
また、ECU10は、指向性を狭角と広角を交互に切り替えるときには、上記制限速度の半分の速度に車両を制御するようにする。一方の指向性での位置検出間隔を、指向性を交互に切り替えるときと、切り替えないときとで同一にするためである。
【0075】
また、障害物を検出したときに限り、それ以降について、この速度制御を行うようにしてもよい。障害物が車両周辺に無いのに速度制御をする必要がないからである。
【0076】
また、速度を制御する代わりに、現在の車両の速度に合わせて、位置検出周期(送信波の送信間隔)を制御してもよい。この場合、ECU10は、所用の検出精度を実現する距離間隔と車両の現在の速度とから、必要な位置検出周期を算出し、この位置検出周期に制御する。この場合も同様に、指向性を狭角と広角を交互に切り替えるときには、上記算出した位置検出周期の半分の周期に制御するようにする。
【0077】
また、車速制御装置70の代わりに報知器を接続し、車両の速度が上記制限速度を越えた場合には、その旨を報知して、ドライバーに車両の速度を制限速度以下にするように促すようにしてもよい。この場合も同様に、障害物を検出したときに限り、それ以降について、この報知を行うようにしてもよい。
【符号の説明】
【0078】
100、200 障害物検出装置
10 ECU
20 送信制御部
30 受信制御部
40A、40B 素子
50 素子取り付け位置記憶部
60 走行状態取得部
70 車速制御装置
【技術分野】
【0001】
本発明は、例えば、駐車支援するために、駐車可能エリアを認識するのに使用される車両周辺の障害物を検出する装置に関する。
【背景技術】
【0002】
一般に、例えば、車両を所定の駐車エリアに駐車させる際の運転操作は、各種運転操作の中でも難易度の高い運転操作の一つである。そのため、従来より、駐車操作を支援する装置が各種提案されている。
【0003】
例えば、特許文献1に記載の装置は、障害物の距離を計測する距離センサを用いて、駐車可能エリアを認識する。そして、その認識した駐車可能エリアに駐車する際の、車両の移動軌跡を計算し表示する。
【0004】
しかし、例えば超音波センサなどの距離センサを用いた場合、指向性が広くなるため、障害物が距離センサの真横に到達する前から障害物を検出してしまい、また、障害物を通過した後も障害物を検出してしまうことが起こる。したがって、認識した駐車可能エリアは、実際の駐車可能エリアと誤差が生ずる。
【0005】
この問題を解決するために、特許文献2に記載の装置は、距離センサによる検出距離と、その検出距離における進行方向の誤差との関係を予め計測しておき、補正幅テーブルとして格納しておく。そして、駐車可能エリア検出における駐車幅の測定において、検出した距離に応じた補正幅を補正値として使用している。
【0006】
また、特許文献3の障害物検知装置では、検出した障害物の位置情報を記憶しておき、その位置情報を現在の車両との相対位置情報に更新している。これによって、障害物検出用のセンサの数を増加させることなく死角を減らすことができる。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開昭61−48098号公報
【特許文献2】特開2003−312414号公報
【特許文献3】特開2003−114276号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
上述したように、特許文献2に記載の装置を用いて、駐車可能エリアを検出するには、正確に距離センサによる検出距離と、その検出距離における進行方向の誤差との関係を計測しておく必要がある。
【0009】
しかしながら、障害物の形状、材質に起因し、障害物の反射率が異なるため、実際は、障害物の形状、材質が異なると、障害物の検出可能範囲も異なってしまう。すなわち、障害物の形状、材質が異なると、距離センサによる検出距離と、その検出距離における進行方向の誤差との関係も異なる。したがって、特許文献2に記載の装置では、どのような障害物に対しても正確な位置を検出することが難しい。
【0010】
また、特許文献3についても同様に、距離センサを用いているので、障害物の正確な位置を検出することができない。特に、駐車可能なスペースを検出したり、狭いスペースを車両が通過するときのように、正確な障害物の検出が要求される場合には、適用することは困難である。
【0011】
本発明は以上の問題点に鑑みてなされたものであり、障害物の種類にかかわらず、障害物の位置や形状を検出でき、駐車可能なスペース、移動可能なスペースを正確に検出できる障害物検出装置を提供することを目的とする。
【課題を解決するための手段】
【0012】
上記目的を達成するために、請求項1の障害物検出装置は、車両に設置され、アレイ状に配置された複数の素子と、前記アレイ状に配置された各素子に送信信号を入力して、前記車両周辺に向けて所定の指向性を有する送信波を送信する送信手段と、前記アレイ状に配置された各素子で前記車両周辺に存在する障害物で反射した反射波を受信し、反射波の有無を判定する受信手段と、前記受信手段が、前記送信手段が送信した送信波の反射波を受信したと判定した場合、当該反射波を受信した時間と前記送信手段が送信波を送信した時間との差に基づいて、障害物の距離を算出し、前記各素子で受信した反射波の位相差に基づいて、前記障害物の方向を算出する位置検出手段と、前記各素子の当該車両の所定の基準位置に対する取り付け位置を記録する取り付け位置記録手段と、前記取り付け位置記録手段が記録した前記各素子の当該車両の所定の基準位置に対する取り付け位置に基づいて、前記位置検出手段が算出した前記障害物の位置情報を、前記車両の所定の基準位置に対する障害物の位置情報に変換する変換手段と、前記変換手段が変換した障害物位置情報を、時刻に対応付けて記憶する障害物位置情報記憶手段と、前記車両が走行しているときに、前記車両の所定の基準位置の移動軌跡を時刻に対応付けて記録する移動軌跡記録手段と、前記障害物位置情報記憶手段が記憶した各時刻の障害物の位置情報と、前記移動軌跡記録手段が記録した前記所定の基準位置の移動軌跡とに基づいて、現在の時刻における前記車両の所定の基準位置を基準とした、前記車両の走行経路周辺の障害物の位置及び形状、障害物の無いスペースを認識する認識手段と、前記認識手段が認識した障害物とを報知する位置報知手段とを備えることを特徴とする。
【0013】
これによって、障害物の距離だけでなく、方向も検出することができる。つまり、障害物の位置を正確に検出することができる。また、特許文献2のような補正値を用いる必要がないので、どのような障害物に対しても正確な位置を検出することができる。
【0014】
また、車両の所定の基準位置(例えば、車両の中心点)の移動軌跡を認識する方法としては、例えば、車両の速度を検出する車速センサや、車両の方位を検出する地磁気センサ、ジャイロスコープや、ステアリング角度を検出するセンサなどを用いて認識する。また、各素子の車両の所定の基準位置に対する取り付け位置情報として、例えば、車両中心を原点とした場合の3次元座標と姿勢を記録する。
【0015】
これにより、車両が走行中において検出した障害物の位置情報を基にして、車両が走行した経路周辺の状況を認識することができる。また、障害物の位置情報を車両の所定の基準位置を基準とした位置情報に変換しているので、例えば車両前部、後部など車両の複数箇所に素子を取り付けて障害物を検出する場合に、複数の位置情報を統合して取り扱うことができる。
【0016】
また、ドライバーは車両周囲に障害物を把握することができる。また、現在地からでは障害物を検出する範囲外となっていても、それまでにその障害物を検出しておれば、その障害物についても報知されることになる。よって、そのような障害物についても確実に接触を回避することができる。
【0017】
また、請求項2のように各素子で受信した反射波の時間差に基づいて、障害物の方向を算出してもよい。
【0018】
請求項3の障害物検出装置は、前記位置報知手段は、画面を備え、当該画面に前記車両を示す画像を表示するとともに、当該車両を示す画像を表示する位置を現在地として前記車両の走行経路周辺の障害物を表示することを特徴とする。これによって、ドライバーは一見して車両周囲の状況を把握することができる。
【0019】
請求項4の障害物検出装置は、前記位置報知手段は、前記認識手段が新たに障害物を認識する度に、当該障害物を前記画面に追加表示することを特徴とする。これによって、ドライバーは障害物の形状など車両周囲の状況を把握することができる。
【0020】
請求項5の障害物検出装置は、前記位置報知手段は、前記車両を示す画像及び障害物を鳥瞰図として表示することを特徴とする。これによって、ドライバーは車両と障害物との位置関係を容易に把握することができる。
【0021】
請求項6の障害物検出装置は、前記車両周辺を撮像する撮像手段と、前記撮像手段が撮像した車両周辺画像を鳥瞰画像に変換する鳥瞰画像変換手段とを備え、前記位置報知手段は、前記鳥瞰画像変換手段が変換した鳥瞰画像を前記鳥瞰図にさらに重ねて、前記車両を示す画像及び障害物を表示することを特徴とする。これにより、ドライバーは車両周囲の実際の状況を把握することができるとともに、特に駐車可能スペースを検出する際には正確に障害物が検出できているか否かを確認することができる。
【0022】
請求項7の障害物検出装置は、前記位置報知手段は、前記障害物を点滅表示することを特徴とする。実際の車両周辺画像(鳥瞰画像)に検出した障害物を重ねて表示すると、それによって実際の車両周辺の状況が把握し辛くなることが予想される。そこで、請求項7では、表示する障害物を点滅させて、このような問題点を防いでいる。
【図面の簡単な説明】
【0023】
【図1】各素子に入力する送信信号の位相差に対応する、送信波の全素子合成指向性を示す図である。
【図2】各素子で受信した復調信号をIQ平面上に表した図と(同図(a))、この信号に複素係数を乗算して各信号の位相を揃えたことを示している図である。
【図3】各復調信号に複素係数乗算後の信号をベクトル加算した信号の、受信信号が障害物の反射波であるか否かの閾値判定を示す図(同図(a))と、ベクトル加算後信号が閾値を越えた部分の複数のサンプルポイントにおいて算出した各素子の受信信号の位相差ベクトル及びそれらを合成したベクトルを示す図(同図(b))である。
【図4】各素子で受信した信号に乗算する複素係数の位相差に対応する合成受信指向性を示している図である。
【図5】第1実施形態の障害物検出装置100の全体構成を示すブロック図である。
【図6】アレイ状に配置された2つの素子を示す図である。
【図7】送信制御部20の構成を示すブロック図である。
【図8】受信制御部30の構成を示すブロック図である。
【図9】各復調信号に複素係数乗算後の信号をベクトル加算した信号の時間変化を示す図(同図(a))と、これに対応する各素子の受信信号の位相の時間変化を示す図(同図(b))である。
【図10】間隔dで配置された2素子に、θ方向から反射波が到来したことを示す図である。
【図11】各素子に入力する送信信号の位相を同相と逆相を交互に切り替えて、送信波の合成指向性を狭角と広角を交互に切り替えていることを示す図である。
【図12】走行中において、車両側方の障害物を各時刻毎で検出したことを示す図である。
【図13】指向性を障害物の位置に応じて切り替えていることを説明するための図である。
【図14】素子の配置例を示す図である。
【図15】送信波の合成指向性を説明するために、基準軸と空間の任意の位置との関係を示した図である。
【図16】複数のサンプルポイントの位相差ベクトルを加算することで各素子の受信信号の位相差を算出することを説明するための図である。
【図17】第2実施形態の障害物検出装置200の全体構成を示す図である。
【図18】3次元で位置検出する例を示す図である。
【図19】素子間隔dが0.5λ以上の場合における、送信波の指向性を示す図である。
【図20】素子間隔dが0.5λよりも大きい場合には、反射波の各素子の位相差によっては、物体の位置が一意に定まらないことを説明するための図である。
【図21】検出した障害物を累積表示する際の処理を示したフローチャートである。
【図22】車両が狭いスペースを通過する際における、検出した障害物の表示例を示した図である。
【図23】駐車可能スペースを認識する際における、検出した障害物の表示例を示した図である。
【図24】車両を後進させて並列駐車する際における、検出した障害物の表示例を示した図である。
【図25】検出した障害物を、車両周辺の鳥瞰画像に重ねて表示する際の処理を示したフローチャートである。
【図26】検出した障害物を、車両周辺の鳥瞰画像に重ねて表示した例図である。
【図27】車両の予想走行経路周辺の障害物のみを表示することを説明するための図である。
【図28】不感帯で検出した反射波を破棄するための閾値を示した図である。
【発明を実施するための形態】
【0024】
(第1実施形態)
以下、本発明の第1の実施形態について説明する。
【0025】
図5は、本実施形態の障害物検出装置100の全体構成を示すブロック図である。同図に示すように、障害物検出装置100は、送信制御部20、受信制御部30、素子40A、40B、素子取り付け位置記憶部50、走行状態取得部60及びECU10から構成される。
【0026】
ECU10は、通常のコンピュータであり、図示しないROM、RAM、CPU、I/O、及びこれらを接続するバスによって構成される。障害物を検出する際には、このECU10は、送信制御部20に対して、所定のタイミングで車両外部に送信波を送信するように指示する。また、ECU10は、受信制御部30に対して、障害物の位置情報を自身に送信するように指示する。そして、後述する素子取り付け位置記憶部50に記憶されている各素子の車両の中心点を基準とした位置情報に基づいて、受信制御部30から送られてきた障害物の位置情報を、車両の中心点を基準とした位置情報に変換し、時刻に対応付けてRAMに記憶しておく。そして、後述する走行状態取得部60に基づいて算出される車両の中心点の移動軌跡に基づいて、このRAMに記憶した位置情報を、現在地を基準とした相対位置に変換し、現在地を基準として、走行経路周辺にどの位置にどのような形状の障害物があるか、障害物のないスペースはどの程度あり、移動可能なスペースがどのくらいあるかを認識する。
【0027】
送信制御部20は、ECU10の送信指示に基づいて、所定の送信信号を生成して、各素子(40A、40B)に出力する部分である。具体的には、図7に示すように、送信位相決定部21、送信波形生成部22A、22Bから構成される。
【0028】
送信位相決定部21は、素子40A、40Bのそれぞれに入力する送信信号の位相を決定し、送信波形生成部22A、22Bに指示する。本実施形態では、送信波の指向性を狭角と広角を交互に切り替わるように、各素子に入力する送信信号の位相を決定している。本実施形態では、後述するように、素子40A、40Bは、送信波の波長λに対して、半波長(λ/2)の間隔で配置されており、この場合、送信波の2次元平面(φ=0)の指向性E(θ、φ)は、次式のように表される。なお、次式中、θ、φは、図15のように空間に原点と基準軸を設けたときの、任意の点における、その任意の点と原点とを結んだ直線と基準軸との角度を表しており、また、E0(θ、φ)は各素子単体の指向性、Δθmは各素子に入力する送信信号の位相差を表している(各素子に入力する送信信号の位相差をΔθmとするため、θ0=0、θ1=Δθmとしている)。
【0029】
(数4)
E(θ、φ)=E0(θ、φ)×[1+exp{j(π×sinθ+Δθm)}]
ここで、指向性E(θ、φ)を狭角にするには、各素子に入力する送信信号の位相差Δθmを0(同相)とし、指向性E(θ、φ)を広角にするには、各素子に入力する送信信号の位相差Δθmを180度(逆相)とすればよい。したがって、送信波の指向性を狭角と広角を交互に切り替えるには、図11に示すように、各素子に入力する送信信号の位相を同相と逆相を交互に切り替えればよい。つまり、送信位相決定部21は、送信波形生成部22A、22Bに対して、交互に、同相の位相と逆相の位相を指示している。
【0030】
送信波形生成部22A、22Bは、送信位相決定部21からの指示に基づいて、所定位相、所定周波数の正弦波を生成し、それをパルス変調した信号を送信信号として、各素子に入力する。
【0031】
素子40A、40Bは、図6に示すように、送信波の波長λに対して、半波長λ/2の間隔で、アレイ状に配置されており、送信波形生成部22A、22Bから送信された送信信号に応じた送信波を外部に送信する。素子40A、40Bとして、具体的には、超音波を発生する超音波マイクや、電波を発生するアンテナが挙げられる。また、素子40A、40Bは、外部から到来する信号を受信し、この受信信号を受信制御部30に送信する。
【0032】
受信制御部30は、素子40A、40Bから送られてきた信号に基づいて、その信号が障害物の反射波であるか否かを判定し、反射波であると判定したときは、その反射波に基づいて障害物の位置を算出する部分である。具体的には、図8に示すように、直交復調部31A、31B、複素係数決定部32、乗算部33A、33B、加算部34、振幅算出部35、閾値判定部36、距離算出部37、方位算出部38、位置変換部39から構成される。
【0033】
直交復調部31A、31Bは、素子40A、40Bから送られてきた信号を直交復調する部分である。具体的には、素子40A、40Bから送られてきた信号に、所定の各周波数の正弦波ならびに余弦波を掛け合わせ、ローパスフィルタにより高周波成分を除去し、同相成分(I)と直交成分(Q)を抽出する。この操作はAD変換後に行ってもよいし、直交復調後にAD変換し、ディジタル値に変換してもよい。この直交復調信号を、同相成分(I)と直交成分(Q)の信号からなる複素平面(IQ平面)に表すと、図2(a)示すように、所定の大きさ、位相をもつベクトルとして表すことができる。
【0034】
複素係数決定部32は、各素子の直交復調後の信号に乗算する複素係数を決定する部分である。この複素係数の値によって、受信指向性を変えることができる。本実施形態では、送信指向性と同じ指向性となるように、この複素係数の値を決定している。つまり、受信指向性が狭角と広角が交互に切り替わるように、複素係数の位相を同相と逆相を交互に切り替えている。
【0035】
そして、乗算部33A、33Bで、各復調信号に複素係数決定部32で決定した複素係数を乗算して、各復調信号の位相差を変え、これらを加算部34でベクトル加算する。その後、ベクトル加算後の信号の振幅を振幅算出部35で算出し、この振幅が閾値よりも大きいか否かを閾値判定部36で判定する。すなわち、ベクトル加算後の信号の振幅が閾値よりも大きいときには、受信信号が障害物からの反射波であると判定し、距離算出部37、方位算出部38によってその反射波に対応した障害物の位置を算出する。具体的には、距離算出部37は、受信信号のベクトル加算後振幅が閾値を越えたときの時間と、送信波を送信したときの時間との時間差から(図9(a)参照)、障害物の距離を算出する。
【0036】
また、方位算出部38は、ベクトル加算後の信号の振幅が閾値を越えた部分の、各復調信号の位相差に基づいて、方位を算出する(図9(b)参照)。具体的には、図10に示すように、2素子間の距離をd、各復調信号の位相差をΔφ、反射波の波長をλとすると、反射波の到来方向θは、次式のように表される。
【0037】
(数5)
θ=sin−1(Δφ×λ/(2π×d))
上式に、反射波の波長λ(送信波の波長λと同じ)と、2素子間の距離d(λ/2)を代入し、各復調信号の位相差Δφを算出すれば、反射波の到来方向θを算出することができる。
【0038】
ここで、各復調信号の位相差Δφを算出するために、先ず、ベクトル加算後の信号の振幅が閾値を越えた部分の複数のサンプルポイントにおいて、次式に示す、受信信号の大きさを反映した、各復調信号の位相差を示す位相差ベクトルDefを算出する。なお、次式中、X、Yは、各復調信号の強度を表しており、φ1、φ2は、各復調信号の位相を表している。
【0039】
(数6)
Def=X×Y×exp(j(φ1―φ2))=X×Y×exp(j(Δφ))
ここで、各復調信号Rx_A、Rx_Bをそれぞれ、次式のように、同相成分(I)と直交成分(Q)の和で表す(図16(a)参照)。なお、次式中、a+jb、c+jdは単位ベクトルである。
【0040】
(数7)
Rx_A→X×exp(jφ1)=X×(a+jb)=(X×a)+j(X×b)
(数8)
Rx_B→Y×exp(jφ2)=Y×(c+jd)=(Y×c)+j(Y×d)
これらの数式を上記数式6に代入し、位相差ベクトルDefの同相成分Def_Iと直交成分Def_Qはそれぞれ次式のように表される。
【0041】
(数9)
Def_I=(X×a)×(Y×c)+(X×b)×(Y×d)
(数10)
Def_Q=(X×b)×(Y×c)―(X×a)×(Y×d)
したがって、各復調信号の成分を上記数式9、10に代入することにより、位相差ベクトルDefを算出することができる(図16(b)参照)。そして、各サンプルポイントにおいて算出した位相差ベクトルを加算して、合成位相差ベクトルSum_Defを算出し(図16(c)参照)、この合成位相差ベクトルSum_Defの位相から、障害物の方向を算出するための、各復調信号の位相差Δφを算出する。このように、受信信号の大きさを反映した位相差ベクトルを合成することで、受信信号の大きさを重みとしてもつ位相差の平均が可能となり、正確に位相差Δφを算出することができる。このΔφに基づき(数5)から反射波の到来方向θを算出する。
【0042】
位置変換部39は、距離算出部37で算出した障害物の距離情報及び、方位算出部で算出した障害物の方向情報とから、障害物の位置を示す座標情報に変換する部分である。本実施形態では、2つの素子40A、40Bを用いているので、各素子が属している平面上の2次元座標に変換する。そして、位置変換部39は、ECU10からの位置情報要求指示に基づいて、障害物の位置情報をECU10に送信する。
【0043】
素子取り付け位置記憶部50は、素子40A、40Bの車両に対する取り付け位置情報を記憶する部分である。本実施形態では、車両中心点を原点としたときの、3次元座標と姿勢を記憶している。
【0044】
走行状態取得部60は、車速センサ、地磁気センサ、ジャイロスコープや、ステアリング角度などから、車両の各時刻における車速、方位を示す走行状態を取得する部分である。
【0045】
ECU10は、障害物を検出する際には、走行状態取得部60から取得する走行状態に基づき、車両の中心点の移動軌跡を時刻に対応付けてRAMに記憶していく。また、受信制御部30から送られてきた障害物の位置情報を、車両の中心点を基準とした位置情報に変換し、時刻に対応付けてRAMに記憶しておく。このように、障害物の位置情報を車両の中心点を基準とした位置情報に変換しているのは、車両に取り付ける素子を素子40A、40Bだけでなく、他の箇所にも素子を取り付けて障害物を検出する場合に、複数の位置情報を統合して取り扱うためである。そして、RAMに記憶した車両中心点の移動軌跡に基づいて、RAMに記憶した各時刻に対応する障害物の位置情報を、現在地を基準とした位置に変換する。つまり、ECU10は、図12に示すように、各時刻で検出した障害物の位置情報を現在の時刻、位置を基準にして認識している。これによって、走行中において検出した複数の障害物の位置情報から障害物の形状を認識することができる。図12(a)のような棒状の障害物の場合は、一点として算出し、棒状の障害物として認識でき、図12(b)のような平面状の障害物の場合、移動に応じて異なる点を算出し、障害物が平面状であることを認識できる。具体的には、例えば縦列駐車時のスペースを検索する用途で使用した場合、図12(c)のように、駐車車両の形状を検出し、駐車に使用できるスペースを検索することができる。同様に並列駐車スペース検索に適用した場合でも図12(d)のように、駐車車両の形状を検出し、駐車に使用できるスペースを検索し、スペース有無の判定や、自動駐車の目標位置設定に使用することができる。なお、素子40A、40Bを、車両の側面に、車両の進行方向に対して直交する方向に主放射方向を向けるように取り付ければ、遠方までの駐車スペースを検索することができる。
【0046】
以上、本実施形態の障害物検出装置100は、アレイ状に配置された素子を用いることで、障害物の距離だけでなく、方向も検出することができる。つまり、障害物の位置を正確に検出することができる。また、各素子に入力する送信信号の位相を、同相と逆相に交互に切り替えることによって、送信波の指向性を狭角と広角の交互に切り替えている。一方、受信指向性についても、送信指向性と同じ指向性となるように、各素子で受信した受信信号に乗算する複素係数の位相を同相と逆相に交互に切り替えている。これによって、広範囲で障害物を検出することができる。さらに、走行中において検出した障害物の位置情報を、現在の位置を基準に変換しているので、当該走行経路周辺の障害物の状況を現在地に対する位置として認識することができる。これによって、例えば、この障害物検出装置100を駐車を支援するために用いるときには、車両周辺の障害物の状況と、駐車可能、移動可能なスペースを正確に認識することができる。
【0047】
(変形例1)
上記実施形態では、障害物を広範囲で検出するために、送受信指向性を狭角と広角の交互に切り替えているが、これに限定されることはなく、用途などに応じてどのように送受信指向性を制御してもよい。また、例えば、図13に示すように、障害物を検出するまでは、指向性を狭角と広角の交互に切り替え、障害物を検出したときは、それ以降はその障害物の位置に応じて、指向性を制御してもよい。これによって、車両が走行していても、障害物に追従できるので、障害物の位置を正確に検出することができる。
【0048】
(変形例2)
上記実施形態のように、2つの素子をアレイ状に配置することにより、障害物の位置を、その2素子が属している平面上の2次元位置として算出することができる。通常、障害物は道路上に位置しているので、図14(a)、(b)に示すように、2素子を地表面に対して水平、又は垂直に配置するのが望ましい。2素子を地表面に対して水平に配置した場合(同図(a))、指向性を狭角、広角に切り替えることにより、地表面に対して水平方向に広範囲に障害物の位置を検出することができる。同様に、2素子を地表面に対して垂直に配置した場合(同図(b))は、地表面に対して垂直方向に広範囲に障害物の位置を検出することができる。
【0049】
また、図14(c)、(d)に示すように、3素子を三角形状に配置することにより、障害物の3次元位置を検出することができる。同図(c)のように、3素子で構成される三角形の一辺が地表面に対して水平となるように配置し、その一辺を構成する素子の組(素子A、B)について位相差を切り替え、指向性を適宜切り替えることにより、水平方向に広範囲に障害物の位置を検出することができる。また、素子A、Cの組とB、Cの組で検出する方位情報から、障害物の地表面に対して垂直方向の位置情報を算出できる。つまり、障害物の3次元位置を検出することができる。同様に、同図(d)のように、3素子で構成される三角形の一辺が地表面に対して垂直となるように配置し、その一辺を構成する素子の組(素子B、C)について位相差を切り替え、指向性を適宜切り替えることにより、垂直方向に広範囲に障害物を検出することができる。さらに、同図(c)、(d)のように、3素子で構成される三角形が正三角形となるようにその3素子を配置することにより、3つの素子で囲まれる領域をコンパクトにすることができ、小型化できる。
【0050】
また、図14(e)に示すように、4素子を一辺が地表面に対して水平となうように、正方形状に配置すれば、水平に配置された素子の組によって、水平方向に広範囲に障害物の位置を検出できるとともに、垂直に配置された素子の組によって、垂直方向にも広範囲に障害物の位置を検出できる。また、素子を4つ用いることで、水平方向について、A,B及びC,Dの2組、垂直方向について、A,C及びB,Dのそれぞれで方位を算出しその結果を合成することで、位置検出精度を向上することもできる。このように、3次元位置を検出できるため、図18のように、例えば縁石などの障害物までの距離を検知したい場合、従来の距離センサに対して、障害物までの距離を正確に検出することができる。また、3素子、4素子の場合に、水平に配置された素子の組のみの位相差を切り替え、水平方向のみ広範囲に検出してもよい。
【0051】
(変形例3)
上記実施形態では、走行中に障害物を検出した結果から車両周囲の状況をECU10が認識するのみであった。そこで、このECU10が認識した車両周囲の状況を、更新表示するようにしてもよい。具体的には、例えば図21のフローチャートを従って表示する。なお、同図に示す処理はECU10が行う。また、ECU10が認識した車両周囲の状況を更新表示するためには、ECU10に例えば液晶ディスプレイなどの表示装置を接続しておく必要がある。
【0052】
先ず、ステップS11において、画面に自車両を示す画像を表示するとともに、その自車両を示す画像を表示している位置を現在地として、現在ECU10が認識している障害物の検出結果をマーカー表示する。この際、それまでに複数の障害物の検出結果を記憶している場合は、それら全てが表示されることになる。
【0053】
次にステップS12において、新たに障害物が検出されたか否かを判定する。これは、受信制御部30から障害物の位置情報が送られてきたか否かによって判定する。ここで、新たに障害物が検出されていない場合は(否定判定)、再びステップS11に戻る。この際、車両の現在地に応じて、表示画面を更新する。一方、新たに障害物が検出された場合は(肯定判定)、ステップS13において、その検出結果を、上述したように車両の中心点を基準とした位置情報に変換し、時刻に対応付けてRAMに追加記憶する。その後、再びステップS11に戻り、その記憶した検出結果を追加して、RAMに記憶されている各障害物の検出結果の表示を更新する。このように検出結果が多くなるほど、それが表示画面に反映されることになるので、ドライバーは車両周囲の状況を認識しやすくなる。
【0054】
図22〜24は各状況ごとに障害物の検出結果を更新表示した例を示した図である。図22は、自車両の両側近傍に障害物があるような、狭いスペースを通過する際の表示例について示した図であるが、同図(a)の実際の状況に対して同図(b)のように障害物の検出結果がマーカー(円)で累積表示される。これによって、ドライバーは表示画面を確認することにより、自車両と障害物とがどれ程離れているのかを感覚的に把握することができる。したがって、狭いスペースを通過する際にも、障害物に接触することなく通過することができる。
【0055】
また、図23は、駐車可能スペースを認識する際の、その認識結果を表示した例を示した図であるが、同図(a)の実際の状況に対して同図(b)のように障害物の検出結果がマーカー(円)で累積表示される。これによって、ドライバーは正確に駐車可能スペースが認識されたか否かを把握することができる。
【0056】
また、図24は、駐車可能スペースに車両を後進させて並列駐車する際の、障害物の検出結果を表示した例を示した図であるが、同図(a)の実際の状況に対して同図(b)のように障害物の検出結果がマーカー(円)で累積表示される。これによって、ドライバーは両側の駐車車両に接触することなく、その駐車可能スペースに車両を駐車させることができる。
【0057】
(変形例4)
上記変形例3では、自車両を示す画像と障害物の検出結果のみを更新表示していた。しかし、この場合、表示されている障害物の検出結果が、実際のどの障害物に対応するのかを把握し辛い場合も想定される。そこで、実際の車両周辺の画像に重ねて、障害物の検出結果を更新表示するようにしてもよい。具体的には、例えば図25のフローチャートに従って表示する。なお、同図に示す処理はECU10が行う。また、車両周辺の画像を撮像するためのカメラを車両に設置して、ECU10に接続しておく必要がある。
【0058】
先ず、ステップS21において、そのカメラを用いて車両周辺を撮像する。次にステップS22において、その撮像した画像を鳥瞰画像に変換する。次にステップS23において、その変換した鳥瞰画像に重ねて、それまでに検出した障害物の検出結果を表示する。この際、自車両を示す画像も表示し、その表示位置を現在地として各障害物を表示する。例えば図26(a)に示す実際の状況に対しては、図26(b)のように表示される。
【0059】
次に、ステップS24において、新たに障害物が検出されたか否かを判定する。ここで、新たに障害物が検出されてない場合は(否定判定)、再びステップS21に戻る。この際、車両が移動した場合には、現在地を基準として障害物の検出結果が更新表示されることになる。一方、新たに障害物が検出された場合は、ステップS25において、その検出結果を、上述したように車両の中心点を基準とした位置情報に変換し、時刻に対応付けてRAMに記憶する。その後、再びステップS21に戻り、その記憶した検出結果を含めて、RAMに記憶されている障害物の検出結果の表示を更新する(ステップS21〜23)。
【0060】
このように、実際の車両周辺の鳥瞰画像に障害物の検出結果を重ねて表示することにより、どの障害物が検出されたのかを容易に把握することができる。
【0061】
また、障害物の検出結果を示すマーカーを常時鳥瞰画像に重ねて表示すると、その鳥瞰画像が把握し辛くなる可能性もある。そこで、そのマーカーを点滅表示させてもよい。
【0062】
(変形例5)
上記変形例3、4では、検出した障害物の位置にかかわらず同じマーカーで表示していた(図22〜図24、図26参照)。この場合であっても、自車両を示す画像も表示されているので、ドライバーは障害物が車両からどれくらい離れているのかを感覚的に把握することはできる。しかし、障害物が車両からどれくらい離れているのかを、さらに容易に把握できるようにするために、障害物の位置(車両からの距離や高さ)に応じて、マーカーの種類や色を変えるようにしてもよい。
【0063】
(変形例6)
上記変形例3〜5のように、検出した障害物を更新表示した場合、検出誤差によって実際の障害物との位置に対して、その誤差分だけ異なる位置で表示される可能性もある。そこで、検出した障害物をマーカーで表示する際には、そのマーカーにその検出誤差を加味したマージンを付加してもよい。すなわち、表示するマーカーを大きくする。これによって、車両が誤って障害物に接触してしまうことを防ぐことができる。
【0064】
(変形例7)
上記変形例3〜6では、ECU10が認識した障害物の検出結果を、表示画面に表示できる範囲で全て表示することを前提としていた。しかし、例えば図27に示すように、車両を後進させて並列駐車する場合、ドライバーにとっては駐車が完了するまでの走行経路周辺の障害物のみを把握できればよいと考えられる。そこで、あらかじめ車両の走行経路を予想し、その予想した走行経路周辺の障害物のみを表示するようにしてもよい。車両の走行経路を予想する方法としては、例えば車両の速度及び操舵角に基づいて予想したり、車両固有の最大操舵角に基づいて予想したりする。
【0065】
(変形例8)
上記変形例3〜7では、車両の周囲の状況をドライバーにより正確に把握させるために、走行中に検出した障害物を、表示画面に表示できるかぎりにおいて全て表示していた。しかし、ドライバーによっては、車両から遠く離れている障害物についてまで表示をすると、煩わしいと思う場合もあり得る。そこで、車両から所定範囲内の障害物のみを表示するようにしてもよい。または、車両から所定範囲内に障害物が近づいた場合には音で報知するようにしてもよい。
【0066】
また、車両から所定範囲内の障害物のみを報知しても、ドライバーはその報知を見落としたり、聞き漏らしたりする可能性もある。そこで、ECU10に車両の制動を制御する制動装置を接続し、車両の極近傍に障害物が入ってきたときには、車両を停止させるように、ECU10はその制動装置に指示を出してもよい。これによって、車両が障害物に接触することを確実に防ぐことができる。
【0067】
(変形例9)
上記変形例3〜8では、ECU10が走行中に検出した障害物を更新表示していた。しかし、ドライバーによっては障害物の位置の表示を必要としないと考える場合もあり得る。そこで、検出した障害物を表示するか否かをECU10に指示するスイッチを設けてもよい。
【0068】
(変形例10)
上記実施形態では、車両の走行中に検出した障害物の位置情報をRAMに記憶していた。つまり、車両が走行していることを前提としていた。しかし、車両を駐車場などに停車して、その後再走行する場合には、車両の近傍に障害物がある場合もある。そこで、停車前に認識した障害物の位置情報を保持するようにして、例えばドライバーが再乗車した際に、車両近傍に障害物がある旨を音で知らせたり、停車前に認識した障害物をそのまま表示するようにしてもよい。これにより、ドライバーは安心して走行を再開することができる。なお、この処理を行う前提として、ECU10は車両のエンジンオンオフを検知するセンサと接続されている必要がある。
【0069】
(変形例11)
例えば、送信波として超音波パルスを用いた場合、送信波が送信されたことによる残響が各素子にある時間内に反射波を受信しても、反射波が残響と重なってしまう。そのため、反射波の立ち上がりを正確に検出できないので、障害物の位置を正確に検出することは困難となる。そこで、反射波を受信したか否かの閾値として、図3に示す閾値の他に図28(a)に示すような不感帯用の閾値を設け、反射波の受信レベルが不感帯用の閾値を所定時間以上越えていたら不感帯で反射波を受信したと判定し、その反射波の情報を破棄するようにしてもよい。また、図3に示す閾値に替えて、図28(b)に示すように不感帯の領域の閾値を大きくした閾値を用いてもよい。これにより、結果的に不感帯の反射波は受信されなくなるからである。
(変形例12)
上記実施形態では、各素子40A、40Bで受信した反射波の位相差Δφから障害物の方向を算出していた(数5式参照)。しかし、この位相差Δφの代わりに、各素子40A、40Bで受信した反射波の時間差から障害物の方向を算出してもよい。
【0070】
(第2実施形態)
次に、本発明の第2の実施形態について説明する。
【0071】
本発明の障害物検出装置を、例えば、駐車支援のために、駐車可能エリア及びその周辺の状況を認識するために用いる場合、正確に障害物の位置を検出する必要がある。したがって、送信波を頻繁に送信し、できるだけ多くの障害物の位置情報を収集するのが望ましい。しかし、送信波を送信しその反射波を受信して位置を算出するまでには、ある程度の時間を要するので、位置検出周期(送信波の送信間隔)を小さくするのにも限度がある。このようなことから、本実施形態では、所定の位置検出周期と所用の検出精度を満足する距離間隔とから算出される制限速度を越えないように、車両の速度を制御するようにしたものである。
【0072】
図17は、本実施形態の障害物検出装置200の全体構成を示すブロック図である。なお、第1実施形態と同じ部品については、同一の符号を付している。同図に示すように、本実施形態の障害物検出装置200は、ECU10に車両の速度を制御する車速制御装置70が接続されている。この車速制御装置70は、例えば、ブレーキペダル及びアクセルペダルを制御する装置とから構成される。なお、障害物検出装置200の他の部品いついては、上述した第1実施形態と同様なので説明を省略する。
【0073】
この障害物検出装置200の動作について、ECU10は、障害物を検出するときには、走行状態取得部60から車両の速度情報を取得しつつ、車両の速度が上記制限速度になるように、車速制御装置70に指示する。これによって、所用の障害物の検出精度を実現することができる。
【0074】
また、ECU10は、指向性を狭角と広角を交互に切り替えるときには、上記制限速度の半分の速度に車両を制御するようにする。一方の指向性での位置検出間隔を、指向性を交互に切り替えるときと、切り替えないときとで同一にするためである。
【0075】
また、障害物を検出したときに限り、それ以降について、この速度制御を行うようにしてもよい。障害物が車両周辺に無いのに速度制御をする必要がないからである。
【0076】
また、速度を制御する代わりに、現在の車両の速度に合わせて、位置検出周期(送信波の送信間隔)を制御してもよい。この場合、ECU10は、所用の検出精度を実現する距離間隔と車両の現在の速度とから、必要な位置検出周期を算出し、この位置検出周期に制御する。この場合も同様に、指向性を狭角と広角を交互に切り替えるときには、上記算出した位置検出周期の半分の周期に制御するようにする。
【0077】
また、車速制御装置70の代わりに報知器を接続し、車両の速度が上記制限速度を越えた場合には、その旨を報知して、ドライバーに車両の速度を制限速度以下にするように促すようにしてもよい。この場合も同様に、障害物を検出したときに限り、それ以降について、この報知を行うようにしてもよい。
【符号の説明】
【0078】
100、200 障害物検出装置
10 ECU
20 送信制御部
30 受信制御部
40A、40B 素子
50 素子取り付け位置記憶部
60 走行状態取得部
70 車速制御装置
【特許請求の範囲】
【請求項1】
車両に設置され、アレイ状に配置された複数の素子と、
前記アレイ状に配置された各素子に送信信号を入力して、前記車両周辺に向けて所定の指向性を有する送信波を送信する送信手段と、
前記アレイ状に配置された各素子で前記車両周辺に存在する障害物で反射した反射波を受信し、反射波の有無を判定する受信手段と、
前記受信手段が、前記送信手段が送信した送信波の反射波を受信したと判定した場合、当該反射波を受信した時間と前記送信手段が送信波を送信した時間との差に基づいて、障害物までの距離を算出し、前記各素子で受信した反射波の位相差に基づいて、前記障害物の方向を算出する位置検出手段と、
前記各素子の当該車両の所定の基準位置に対する取り付け位置を記録する取り付け位置記録手段と、
前記取り付け位置記録手段が記録した前記各素子の当該車両の所定の基準位置に対する取り付け位置に基づいて、前記位置検出手段が算出した前記障害物の位置情報を、前記車両の所定の基準位置に対する障害物の位置情報に変換する変換手段と、
前記変換手段が変換した障害物位置情報を、時刻に対応付けて記憶する障害物位置情報記憶手段と、
前記車両が走行しているときに、前記車両の所定の基準位置の移動軌跡を時刻に対応付けて記録する移動軌跡記録手段と、
前記障害物位置情報記憶手段が記憶した各時刻の障害物の位置情報と、前記移動軌跡記録手段が記録した前記所定の基準位置の移動軌跡とに基づいて、現在の時刻における前記車両の所定の基準位置を基準とした、前記車両の走行経路周辺の障害物の位置及び形状、障害物の無いスペースを認識する認識手段と、
前記認識手段が認識した障害物を報知する位置報知手段とを備えることを特徴とする障害物検出装置。
【請求項2】
車両に設置され、アレイ状に配置された複数の素子と、
前記アレイ状に配置された各素子に送信信号を入力して、前記車両周辺に向けて所定の指向性を有する送信波を送信する送信手段と、
前記アレイ状に配置された各素子で前記車両周辺に存在する障害物で反射した反射波を受信し、反射波の有無を判定する受信手段と、
前記受信手段が、前記送信手段が送信した送信波の反射波を受信したと判定した場合、当該反射波を受信した時間と前記送信手段が送信波を送信した時間との差に基づいて、障害物までの距離を算出し、前記各素子で受信した反射波の時間差に基づいて、前記障害物の方向を算出する位置検出手段と、
前記各素子の当該車両の所定の基準位置に対する取り付け位置を記録する取り付け位置記録手段と、
前記取り付け位置記録手段が記録した前記各素子の当該車両の所定の基準位置に対する取り付け位置に基づいて、前記位置検出手段が算出した前記障害物の位置情報を、前記車両の所定の基準位置に対する障害物の位置情報に変換する変換手段と、
前記変換手段が変換した障害物位置情報を、時刻に対応付けて記憶する障害物位置情報記憶手段と、
前記車両が走行しているときに、前記車両の所定の基準位置の移動軌跡を時刻に対応付けて記録する移動軌跡記録手段と、
前記障害物位置情報記憶手段が記憶した各時刻の障害物の位置情報と、前記移動軌跡記録手段が記録した前記所定の基準位置の移動軌跡とに基づいて、現在の時刻における前記車両の所定の基準位置を基準とした、前記車両の走行経路周辺の障害物の位置及び形状、障害物の無いスペースを認識する認識手段と、
前記認識手段が認識した障害物を報知する位置報知手段とを備えることを特徴とする障害物検出装置。
【請求項3】
前記位置報知手段は、画面を備え、当該画面に前記車両を示す画像を表示するとともに、当該車両を示す画像を表示する位置を現在地として前記車両の走行経路周辺の障害物を表示することを特徴とする請求項1または2に記載の障害物検出装置。
【請求項4】
前記位置報知手段は、前記認識手段が新たに障害物を認識する度に、当該障害物を前記画面に追加表示することを特徴とする請求項3に記載の障害物検出装置。
【請求項5】
前記位置報知手段は、前記車両を示す画像及び障害物を鳥瞰図として表示することを特徴とする請求項3又は4に記載の障害物検出装置。
【請求項6】
前記車両周辺を撮像する撮像手段と、
前記撮像手段が撮像した車両周辺画像を鳥瞰画像に変換する鳥瞰画像変換手段とを備え、
前記位置報知手段は、前記鳥瞰画像変換手段が変換した鳥瞰画像を前記鳥瞰図にさらに重ねて、前記車両を示す画像及び障害物を表示することを特徴とする請求項5に記載の障害物検出装置。
【請求項7】
前記位置報知手段は、前記障害物を点滅表示することを特徴とする請求項6に記載の障害物検出装置。
【請求項1】
車両に設置され、アレイ状に配置された複数の素子と、
前記アレイ状に配置された各素子に送信信号を入力して、前記車両周辺に向けて所定の指向性を有する送信波を送信する送信手段と、
前記アレイ状に配置された各素子で前記車両周辺に存在する障害物で反射した反射波を受信し、反射波の有無を判定する受信手段と、
前記受信手段が、前記送信手段が送信した送信波の反射波を受信したと判定した場合、当該反射波を受信した時間と前記送信手段が送信波を送信した時間との差に基づいて、障害物までの距離を算出し、前記各素子で受信した反射波の位相差に基づいて、前記障害物の方向を算出する位置検出手段と、
前記各素子の当該車両の所定の基準位置に対する取り付け位置を記録する取り付け位置記録手段と、
前記取り付け位置記録手段が記録した前記各素子の当該車両の所定の基準位置に対する取り付け位置に基づいて、前記位置検出手段が算出した前記障害物の位置情報を、前記車両の所定の基準位置に対する障害物の位置情報に変換する変換手段と、
前記変換手段が変換した障害物位置情報を、時刻に対応付けて記憶する障害物位置情報記憶手段と、
前記車両が走行しているときに、前記車両の所定の基準位置の移動軌跡を時刻に対応付けて記録する移動軌跡記録手段と、
前記障害物位置情報記憶手段が記憶した各時刻の障害物の位置情報と、前記移動軌跡記録手段が記録した前記所定の基準位置の移動軌跡とに基づいて、現在の時刻における前記車両の所定の基準位置を基準とした、前記車両の走行経路周辺の障害物の位置及び形状、障害物の無いスペースを認識する認識手段と、
前記認識手段が認識した障害物を報知する位置報知手段とを備えることを特徴とする障害物検出装置。
【請求項2】
車両に設置され、アレイ状に配置された複数の素子と、
前記アレイ状に配置された各素子に送信信号を入力して、前記車両周辺に向けて所定の指向性を有する送信波を送信する送信手段と、
前記アレイ状に配置された各素子で前記車両周辺に存在する障害物で反射した反射波を受信し、反射波の有無を判定する受信手段と、
前記受信手段が、前記送信手段が送信した送信波の反射波を受信したと判定した場合、当該反射波を受信した時間と前記送信手段が送信波を送信した時間との差に基づいて、障害物までの距離を算出し、前記各素子で受信した反射波の時間差に基づいて、前記障害物の方向を算出する位置検出手段と、
前記各素子の当該車両の所定の基準位置に対する取り付け位置を記録する取り付け位置記録手段と、
前記取り付け位置記録手段が記録した前記各素子の当該車両の所定の基準位置に対する取り付け位置に基づいて、前記位置検出手段が算出した前記障害物の位置情報を、前記車両の所定の基準位置に対する障害物の位置情報に変換する変換手段と、
前記変換手段が変換した障害物位置情報を、時刻に対応付けて記憶する障害物位置情報記憶手段と、
前記車両が走行しているときに、前記車両の所定の基準位置の移動軌跡を時刻に対応付けて記録する移動軌跡記録手段と、
前記障害物位置情報記憶手段が記憶した各時刻の障害物の位置情報と、前記移動軌跡記録手段が記録した前記所定の基準位置の移動軌跡とに基づいて、現在の時刻における前記車両の所定の基準位置を基準とした、前記車両の走行経路周辺の障害物の位置及び形状、障害物の無いスペースを認識する認識手段と、
前記認識手段が認識した障害物を報知する位置報知手段とを備えることを特徴とする障害物検出装置。
【請求項3】
前記位置報知手段は、画面を備え、当該画面に前記車両を示す画像を表示するとともに、当該車両を示す画像を表示する位置を現在地として前記車両の走行経路周辺の障害物を表示することを特徴とする請求項1または2に記載の障害物検出装置。
【請求項4】
前記位置報知手段は、前記認識手段が新たに障害物を認識する度に、当該障害物を前記画面に追加表示することを特徴とする請求項3に記載の障害物検出装置。
【請求項5】
前記位置報知手段は、前記車両を示す画像及び障害物を鳥瞰図として表示することを特徴とする請求項3又は4に記載の障害物検出装置。
【請求項6】
前記車両周辺を撮像する撮像手段と、
前記撮像手段が撮像した車両周辺画像を鳥瞰画像に変換する鳥瞰画像変換手段とを備え、
前記位置報知手段は、前記鳥瞰画像変換手段が変換した鳥瞰画像を前記鳥瞰図にさらに重ねて、前記車両を示す画像及び障害物を表示することを特徴とする請求項5に記載の障害物検出装置。
【請求項7】
前記位置報知手段は、前記障害物を点滅表示することを特徴とする請求項6に記載の障害物検出装置。
【図1】


【図2】
【図3】

【図4】
【図5】
【図6】

【図7】
【図8】
【図9】
【図10】
【図11】
【図12】

【図13】
【図14】
【図15】
【図16】

【図17】

【図18】
【図19】
【図20】

【図21】
【図22】

【図23】
【図24】

【図25】
【図26】

【図27】
【図28】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【公開番号】特開2010−217193(P2010−217193A)
【公開日】平成22年9月30日(2010.9.30)
【国際特許分類】
【出願番号】特願2010−107505(P2010−107505)
【出願日】平成22年5月7日(2010.5.7)
【分割の表示】特願2005−319945(P2005−319945)の分割
【原出願日】平成17年11月2日(2005.11.2)
【出願人】(000004695)株式会社日本自動車部品総合研究所 (1,981)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成22年9月30日(2010.9.30)
【国際特許分類】
【出願日】平成22年5月7日(2010.5.7)
【分割の表示】特願2005−319945(P2005−319945)の分割
【原出願日】平成17年11月2日(2005.11.2)
【出願人】(000004695)株式会社日本自動車部品総合研究所 (1,981)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]