
障害物検知装置
【課題】光、電波、超音波等の信号波を用いる障害物検知装置において、低コストかつ簡単な構成により、障害物までの距離を精度良く測定可能とする。
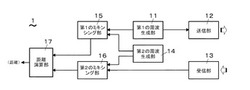
【解決手段】障害物検知装置1は、第1の周波数を持つ送信信号を生成する第1の周波生成部11と、前記送信信号によって搬送波を振幅変調して信号波を生成し、その信号波を空間に送信する送信部12と、信号波の反射波を受信して受信信号として出力する受信部13と、第2の周波数を持つ信号を生成する第2の周波生成部14と、送信信号と第2の周波数を持つ信号とから中間周波信号を出力する第1のミキシング部15と、受信信号と第2の周波数を持つ信号とから中間周波信号を出力する第2のミキシング部16と、送信信号と受信信号のそれぞれから求めた2つの中間周波信号に基づいて障害物までの距離を算出する距離演算部17と、を備える。2つの中間周波を用いるので低コスト構成で距離を精度良く求められる。
【解決手段】障害物検知装置1は、第1の周波数を持つ送信信号を生成する第1の周波生成部11と、前記送信信号によって搬送波を振幅変調して信号波を生成し、その信号波を空間に送信する送信部12と、信号波の反射波を受信して受信信号として出力する受信部13と、第2の周波数を持つ信号を生成する第2の周波生成部14と、送信信号と第2の周波数を持つ信号とから中間周波信号を出力する第1のミキシング部15と、受信信号と第2の周波数を持つ信号とから中間周波信号を出力する第2のミキシング部16と、送信信号と受信信号のそれぞれから求めた2つの中間周波信号に基づいて障害物までの距離を算出する距離演算部17と、を備える。2つの中間周波を用いるので低コスト構成で距離を精度良く求められる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、空間を伝播する信号波を用いて障害物を検知する障害物検知装置に関する。
【背景技術】
【0002】
従来から、マイクロ波などの空間を伝播する信号波を用いて障害物を検知することが行われている。例えば、送信回路からの高周波信号をOn/Offしてパルス化するとともに装置外部に向かって送波し、その送波の障害物による反射波を受信し、前記送信回路からの高周波信号と受信波とをミキシングするとともにAM検波し、得られた検波波形を微分回路で微分し、正の微分出力から反射波の立上りを検出して受波開始時刻を取得し、受波開始時刻と既知の送信開始時刻との時間差を取得し、時間差に基づいて物体までの距離を算出して障害物を検知する障害物検知装置が知られている(例えば、特許文献1参照)。この装置において、前記時間差の取得のために、のこぎり刃状の波形の電圧−時間変換処理を用いたり、サンプリングパルスのパルス数をカウントしたりする処理が行われている。
【0003】
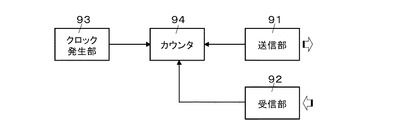
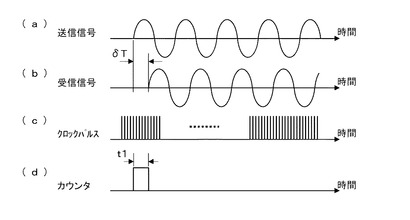
ここで、図16、図17を参照して、パルスカウンタを用いて前記時間差を取得し、障害物までの距離を求める従来技術の一般的な例を説明する。時間差取得に関連する回路部分は、図16に示すように、送信部91、受信部92、クロック発生部93、およびカウンタ94を備えたものとなる。受波開始時刻は、例えば、上述のように微分出力などによって検出されているものとする。カウンタ94は、送信部91からの送波開始時刻の情報と受信部92からの受波開始時刻の情報とに基づいて、これらの時刻の間にクロック発生部93が発生したクロックパルス数(nとする)をカウントする。求める時間差δTは、図17(a)(b)に示すように、送信信号と受信信号の立上りの時刻の時間差であり、クロックパルスは、図17(c)に示すように、時間差δTよりも十分短い周期Tcの高周波(周波数fc=1/Tc)のパルス列である。図17(d)に示すように、カウンタ94によって時間差δTの測定値として、時間t1=n/fc=n×Tcが得られる。時間t1は信号波の障害物までの往復時間であり、障害物までの距離Lは、L=c×t1/2によって求められる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2002−365362号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、距離Lを求めるために、上述した特許文献1や図16、図17に示されるような時間差δTの測定値である時間t1を用いる障害物検知装置においては、距離精度をより向上するためにクロックパルスの周波数fcをより高周波化する必要がある。上述の距離L=c×t1/2におけるcは信号波(電波、光、超音波など)の伝播速度であり、信号波が電波や光の場合、c≒3×108mである。また、距離の誤差ΔLはΔL=c/fc/2となる。従って、例えばfc=150MHzの場合、ΔL=1mとなる。そして、距離の誤差ΔLを5cmまで向上するには、クロックパルスの周波数をfc=3GHzとする必要がある。電気回路は、一般に周波数が高いほど高価であり、実際の回路構成を高速化すると高価な回路構成となり、経済的ではないという問題がある。
【0006】
本発明は、上記課題を解消するものであって、簡単な構成により、光、電波、超音波等の信号波を用いて障害物までの距離を精度良く求めることができる低コストの障害物検知装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記課題を達成するために、本発明の障害物検知装置は、空間を伝播する信号波を用いて障害物を検知する障害物検知装置において、第1の周波数を持つ送信信号によって所定の搬送波を振幅変調することにより信号波を生成すると共にその信号波を空間に送信する送信部と、前記信号波の障害物からの反射波を受信して受信信号として出力する受信部と、前記送信信号と第2の周波数を持つ信号とを互いにミキシングして中間周波信号を出力する第1のミキシング部と、前記受信信号と前記第2の周波数を持つ信号とを互いにミキシングして中間周波信号を出力する第2のミキシング部と、前記第1および第2のミキシング部から出力される2つの中間周波信号に基づいて障害物までの距離を算出する距離演算部とを備えたことを特徴とする。
【0008】
この障害物検知装置において、第2の周波数を持つ信号は送信信号の周波数をシフトすることにより得ることが好ましい。
【0009】
この障害物検知装置において、第1および第2の周波数のいずれか一方または両方が可変であることが好ましい。
【0010】
また、本発明の障害物検知装置は、空間を伝播する信号波を用いて障害物を検知する障害物検知装置において、第1の周波数を持つ送信信号によって所定の搬送波を振幅変調することにより信号波を生成すると共にその信号波を空間に送信する送信部と、前記信号波の障害物からの反射波を受信して受信信号として出力する受信部と、前記送信信号と前記受信信号とをそれぞれ第2の周波数で標本化して2つの標本値列を出力するサンプリング部と、前記サンプリング部によって出力される前記2つの標本値列に基づいて障害物までの距離を算出する距離演算部とを備えたことを特徴とする。
【0011】
この障害物検知装置において、第2の周波数を持つ信号は送信信号の周波数をシフトすることにより得ることが好ましい。
【0012】
この障害物検知装置において、サンプリング部はADコンバータを用いることが好ましい。
【0013】
この障害物検知装置において、第1および第2の周波数のいずれか一方または両方が可変であることが好ましい。
【0014】
また、本発明の障害物検知装置は、空間を伝播する信号波を用いて障害物を検知する障害物検知装置において、第1の周波数を持つ送信信号によって所定の搬送波を振幅変調することにより信号波を生成すると共にその信号波を空間に送信する送信部と、前記信号波の障害物からの反射波を受信して受信信号として出力する受信部と、前記送信信号および後述の標本化に用いる第2の周波数を持つ信号の同期を検出して同期検出信号を出力する同期検出部と、前記同期検出信号を標本化開始のトリガとし、前記受信信号および前記第2の周波数を持つ信号の同期が検出されるまで前記受信信号を前記第2の周波数で標本化して標本値列を出力するサンプリング部と、前記標本値列に基づいて障害物までの距離を算出する距離演算部とを備えたことを特徴とする。
【0015】
この障害物検知装置において、第2の周波数を持つ信号は、送信信号の周波数をシフトすることにより得ることが好ましい。
【0016】
この障害物検知装置において、同期検出部はフリップフロップを用いて構成され、フリップフロップのデータ端子とクロック端子にそれぞれ送信信号および第2の周波数を持つ信号を入力することが好ましい。
【0017】
この障害物検知装置において、同期検出部は第1および第2の周波数を持つ信号をADコンバータによってデジタル化したデータをソフトウエアによって処理することにより同期を検出することが好ましい。
【0018】
この障害物検知装置において、同期検出部は第1および第2の周波数を持つ信号を入力とするコンパレータからの出力を用いて同期を検出することが好ましい。
【0019】
この障害物検知装置において、第1および第2の周波数のいずれか一方または両方が可変であることが好ましい。
【発明の効果】
【0020】
本発明の障害物検知装置によれば、低コストで簡単な構成により、光、電波、超音波等の信号波を用いて障害物までの距離を精度良く算出して障害物を検知することができる。
【図面の簡単な説明】
【0021】
【図1】本発明の第1の実施形態に係る障害物検知装置のブロック構成図。
【図2】(a)〜(e)は同装置の動作を説明するためのタイミングチャート。
【図3】同装置の変形例を示すブロック構成図。
【図4】第2の実施形態に係る障害物検知装置のブロック構成図。
【図5】(a)(b)(c)は同装置の動作を説明するためのタイミングチャート。
【図6】同装置の変形例を示すブロック構成図。
【図7】同装置の他の変形例を示すブロック構成図。
【図8】第3の実施形態に係る障害物検知装置のブロック構成図。
【図9】同装置の変形例を示すブロック構成図。
【図10】第4の実施形態に係る障害物検知装置のブロック構成図。
【図11】(a)(b)(c)は同装置の動作を説明するためのタイミングチャート。
【図12】第5の実施形態に係る障害物検知装置のブロック構成図。
【図13】(a)(b)(c)は同装置の動作を説明するためのタイミングチャート。
【図14】第6の実施形態に係る障害物検知装置のブロック構成図。
【図15】(a)〜(d)は同装置の動作を説明するためのタイミングチャート。
【図16】従来の障害物検知装置における一般的な時間差検出部のブロック構成図。
【図17】(a)〜(d)は同装置の動作を説明するためのタイミングチャート。
【発明を実施するための形態】
【0022】
以下、本発明の実施形態に係る障害物検知装置について、図面を参照して説明する。なお、図2(a)(b)に示す送信信号と受信信号は、以下の各実施形態における共通内容として適宜参照される。
(第1の実施形態)
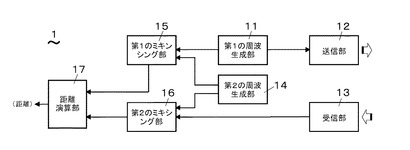
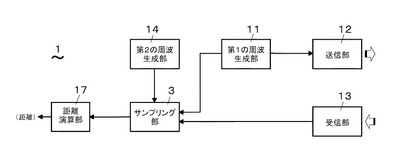
図1、図2は第1の実施形態について示す。図1に示すように、本実施形態の障害物検知装置1は、第1の周波数を持つ送信信号を生成する第1の周波生成部11と、第1の周波生成部11からの送信信号によって所定の搬送波を振幅変調することにより信号波を生成すると共に、その信号波を空間に送信する送信部12と、信号波の障害物からの反射波を受信して受信信号として出力する受信部13と、第2の周波数を持つ信号を生成する第2の周波生成部14と、送信信号と第2の周波数を持つ信号とを互いにミキシングして中間周波信号を出力する第1のミキシング部15と、受信信号と第2の周波数を持つ信号とを互いにミキシングして中間周波信号を出力する第2のミキシング部16と、第1および第2のミキシング部15,16から出力される2つの中間周波信号に基づいて障害物までの距離を算出する距離演算部17と、を備えている。
【0023】
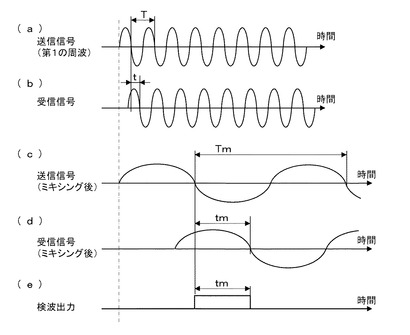
図1に加え、図2を参照して障害物検知装置1の動作を説明する。図2(a)〜(e)に示す各信号は、図1の第1の周波生成部11、受信部13、第1、第2のミキシング部15,16、および距離演算部17からそれぞれ出力される信号の例である。図2(a)(b)に示すように、送信信号は第1の周波数f1=1/Tを持つ正弦波であり、受信信号は、送信信号の送信開始から時間t経過後に、受信部13から出力されている。このような送信信号と受信信号は、それぞれ第2の周波数f2(ただし、f1≠f2)を持つ正弦波でミキシングしてローパスフィルタを通すことにより、図2(c)(d)に示すように、差|f1−f2|の周波数を持つ、より低周波数化された信号(中間周波信号)となる。なお、|*|は*の絶対値を示す。
【0024】
送信信号と受信信号の互いの位相の関係は、ミキシングによって中間周波信号とされた送信信号と受信信号とにおいても保存される。従って、ミキシング後の送信信号と受信信号の位相差、より一般的には、2つの中間周波信号の時間差tmとミキシング後の送信信号の周期Tmとは、上述のt,Tに対して、t/T=tm/Tm、の関係がある。時間差tmに注目すると、tm=t×(Tm/T)=t×(f1/fm)であり、f1=1/T、fm=|f1−f2|=1/Tmである。つまり、例えば、周波数を1/10000に変換(fm=f1/10000)したならば、時間tを10000倍に引き伸ばしたことと同等となる(tm=t×10000)。
【0025】
そこで、距離演算部17では、従来例で説明したような、のこぎり刃状の波形の電圧−時間変換処理を用いたり、サンプリングパルスのパルス数をカウントしたりする処理を行って、この時間差tmを精度良く測定することができる。そして、この時間差tmの測定値(τとする)と、測定値τを実際の測定値(時間tの測定値)に換算するための係数kとを用いて、障害物までの距離Lを、L=k×τ×c/2として求めることができる。ここで、cは送信波(電波、光、超音波など)の伝播速度であり、送信波が電波や光の場合、c≒3×108mである。また、係数kは、上述のtm=t×10000の場合には、k=1/10000である。距離演算部17は、時間差tmの測定に際し、図2(c)(d)における、例えば、各信号の立上り点を検出して2つの立上り点間の時間差を測定する方法や、ゼロクロス点を検出して2つのゼロクロス点間の時間差を測定する方法を用いて、容易に精度良く測定値τを得ることができる。距離演算部17は、このようにして時間差tmを測定し、距離Lや、距離Lに相当する測定値τなどの情報を出力する。
【0026】
上述のように、障害物検知装置1は、送信信号による振幅変調連続波(AM−CW)を信号波とし、送信信号と信号波の反射波による受信信号との時間差(タイム・オブ・フライト)または位相差を測定することにより反射物体である障害物までの距離を求め、距離を認識することによって障害物を検知する装置である。そして、この障害物検知装置1は、時間差や位相差を求める際に、送信信号と受信信号の両方を中間周波に変換することを特徴としている。本実施形態によれば、送信信号と受信信号の両方を中間周波に変換するという簡単な構成により、高価な高周波対応の回路構成を用いることなく低コストの構成によって、光、電波、超音波等の信号波を用いて障害物までの距離を精度良く求めることができ、その距離の測定によって障害物を検知することができる。なお、位相差による場合には、2πラジアンの整数倍に相当する不確定性を考慮する必要がある。
【0027】
(第1の実施形態の変形例)
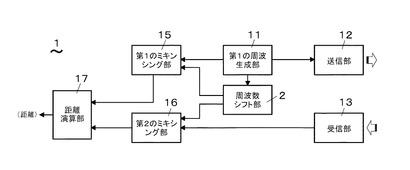
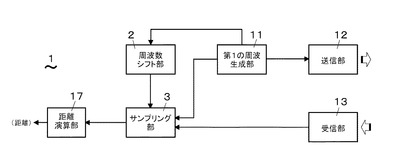
図3は上述の第1の実施形態の変形例を示す。この障害物検知装置1は、上記第1の実施形態の図1における第2の周波生成部14に代えて、周波数シフト部2を備えるものである。周波数シフト部2は、第1の周波生成部11が生成する送信信号の周波数をシフトすることにより、第1および第2のミキシング部15,16において用いる第2の周波数を持つ信号を生成する。本変形例によれば、周波生成部を1つだけ、送信信号生成用の第1の周波生成部11として備えればよく、周波生成部が高価となる場合はコストダウンを見込むことができる。なお、上記図1における第1の周波生成部11に代えて、周波数シフト部2を備え、第2の周波生成部14からの第2の周波数を持つ信号の周波数を周波数シフト部2によってシフトすることにより送信信号を生成するようにしてもよい。
【0028】
(第1の実施形態の他の変形例)
上記第1の実施形態の図1における第1および第2の周波生成部11,14が生成する信号の第1および第2の周波数のいずれか一方または両方を可変としてもよい。また、図3における第1の周波生成部11および周波数シフト部2が生成する信号のいずれか一方または両方を可変としてもよい。例えば、第1の周波数f1を第2の周波数f2に比べて高い周波数とすればする程、検知結果をより早く出力することが可能となる。また、第1の周波数f1を低くして第2の周波数f2に近づければ近づける程、距離分解能が高くなり、より正確な測距が可能となる。一般に、このように周波数を変化させることにより、第1の周波数f1と第2の周波数f2の差fm=|f1−f2|を大きくすればする程、Tm従ってtmが短くなり、時間差tmをより短時間で測定できる。また、逆に、差fmを小さくすればする程、tmが長くなり、時間差tmをより精度良く測定できる。従って、障害物検知装置1を適用する状況に応じて、すなわち、検知速度優先か、測定精度優先かなどの選択肢に応じて、さらに、半固定的または動的に、周波数f1,f2を変化させることにより、適切な動作を実現することができる。周波数f1,f2のいずれか、または両方を可変とする構成は、以下に示す他の実施形態においても同様に適用でき、ここで示した変形例における効果と同様の効果が得られる。
【0029】
(第2の実施形態)
図4、図5は第2の実施形態について示す。図4に示すように、本実施形態の障害物検知装置1は、第1の周波数を持つ送信信号を生成する第1の周波生成部11と、前記送信信号によって所定の搬送波を振幅変調することにより信号波を生成すると共にその信号波を空間に送信する送信部12と、信号波の障害物からの反射波を受信して受信信号として出力する受信部13と、第2の周波数を持つ信号を生成する第2の周波生成部14と、送信信号と受信信号とをそれぞれ第2の周波数で標本化して2つの標本値列を出力するサンプリング部3と、サンプリング部3によって出力される2つの標本値列に基づいて障害物までの距離を算出する距離演算部17とを備えている。
【0030】
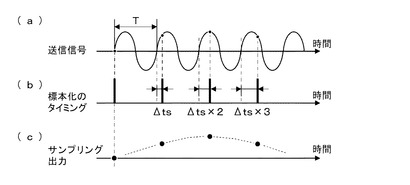
図4に加え、図5を参照して障害物検知装置1の動作を説明する。図5(a)(b)(c)に示す各信号は、図4の第1の周波生成部11、第2の周波生成部14、およびサンプリング部3からそれぞれ出力される信号の例である。送信信号は、図5(a)に示すように、第1の周波数(f1=1/Tとする)を持つ正弦波である。受信信号は送信信号と同じ周波数f1の正弦波であり、送信信号の送信開始から時間差t後に受信部13から出力される(第1の実施形態の図2(a)(b)参照)。第2の周波生成部14が出力する信号は、図5(b)に示すように、受信信号の周波数f1に対して標本化のタイミングが時間差Δtsずつ進む信号(周波数f2=1/T2とする)とされている。つまり、Δts=T2−T=1/f2−1/f1である。第2の周波生成部14は、標本化のためのタイミングパルスを出力するものであればよい。
【0031】
上述のような周波数f2の信号によって送信信号を標本化すると、図5(c)に示すようなサンプリング出力(標本値列)が得られる。この標本値列は、第1の実施形態で示した、送信信号と周波数f2の正弦波とをミキシングして得られる中間周波に相当する。また、受信信号を周波数f2の信号波によって標本化することにより、受信信号と周波数f2の正弦波とをミキシングして得られる中間周波に相当する標本値列が得られる。従って、サンプリング部3によって出力される2つの標本値列の時間のずれ(第1の実施形態における時間差tmに相当)を測定することにより、その測定値に基づいて、すなわち、第1の実施形態における測定値τと係数kとに基づいて、障害物までの距離Lを求めることができる。しかしながら、本実施形態においては、測定値τと係数kとに代えて、時間差tmにおけるサンプリング信号の個数nと、時間差Δtsとを用いて、障害物までの距離Lを求めることができる。
【0032】
例えば、測定値τを求める方法として位相差による方法を用いる場合、位相差がn個のサンプリング信号に相当するという結果が得られるとτ=Δts×nとなり、距離Lは、L=c×τ/2=c×Δts×n/2によって求められる。本方式に基づく距離の誤差ΔL(最大誤差)は、例えばf1=2.5015625MHz、f2=2.5MHzとし、信号波を電波(c≒3.0×108m)とした場合、ΔL=c×Δts/2=(1/f2−1/f1)×c/2=3.75cm(=0.25ns)となる。また、各標本値列における互いの同位相点を求める際に、各標本列をフィッティングした曲線を用いたり、ゼロクロス点を挟む2点間の線分の比例配分点を用いたりして量子化による誤差を減らすことができる。また、2つの標本値列の相互相関関数から位相差を求めてもよい。この場合、大域的な判断ができるので、局所的な信号変動に左右されることなく、より精度良く位相差を求めることができる。また、各標本値列における位相ゼロの位置や位相πの位置は、例えば、隣り合う2つの標本値の符号の変化やゼロからの増減によって検出することができる。
【0033】
また、上記2つの周波数f1,f2の設定に際し、一方の周波数が他方の周波数に対して、ある周期毎に正確に同期する周波数を選択することにより、2つの標本値列のそれぞれにおける特定の「同期」したサンプリング信号の検出によって、容易に上記個数nを求めることができる。すなわち、周波数f1を持つ送信信号と第2の周波数f2を持つ信号が、ある瞬間にそれぞれ任意に設定したある特定の位相値を持つ状態を「同期」状態と定義し、その時刻を同期時刻とする。例えば、正弦波における位相値ゼロを、両信号のそれぞれの特定の位相値とすれば、両信号の波形が同時に立上る状態が「同期」状態であり、その時刻が同期時刻である。そこで、第2の周波数f2を持つ信号と送信信号との同期を検出し、その後、引き続いて送信信号の場合と同様に、第2の周波数f2を持つ信号と受信信号との最初の同期を検出する。つまり、「同期」状態におけるサンプリング点を2つの標本値列のそれぞれにおいて1点づつ検出する。送信信号に対して検出した同期点において個数nを0とし、その後、サンプリング点(サンプリング信号)毎に個数nを加算し、受信信号に対して検出した同期点において最終の個数nが得られたとする。この個数nが、送信信号と受信信号の位相差に相当する。本実施形態によれば、第1の実施形態における第1および第2のミキシング部15,16が不要になり、サンプリング部3のコストとの兼ね合いによって、コストダウンを見込むことができる。
【0034】
(第2の実施形態の2つの変形例)
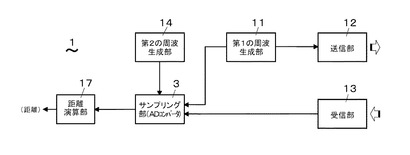
図6、図7は上記第2の実施形態の変形例を示す。図6の変形例は、上記第2の実施形態の図4における第2の周波生成部14に代えて、周波数シフト部2を備えるものである。この構成の障害物検知装置1の動作や効果は、第1の実施形態における変形例(図3)について説明した内容と同様である。すなわち、本変形例は第2の周波生成部を備えないので、第2の周波生成部14(パルス生成部)が高価となる場合は、コストダウンを見込むことができる。また、図7の変形例は、上記第2の実施形態におけるサンプリング部3をADコンバータ(ADC)を用いて構成するものである。
【0035】
(第3の実施形態)
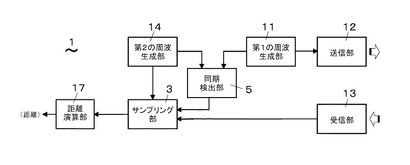
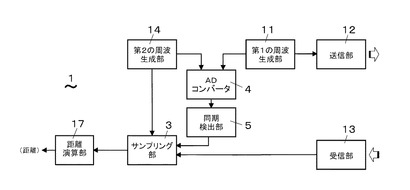
図8、図9は第4の実施形態とその変形例について示す。図8に示すように、本実施形態の障害物検知装置1は、第1の周波数を持つ送信信号を生成する第1の周波生成部11と、前記送信信号によって所定の搬送波を振幅変調することにより信号波を生成すると共に、その信号波を空間に送信する送信部12と、信号波の障害物からの反射波を受信して受信信号として出力する受信部13と、第2の周波数を持つ信号を生成する第2の周波生成部14と、送信信号と第2の周波数を持つ信号との同期を検出して同期検出信号を出力する同期検出部5と、同期検出信号を標本化開始のトリガとし、受信信号と第2の周波数を持つ信号との同期が検出されるまで受信信号を第2の周波数で標本化して標本値列を出力するサンプリング部3と、標本値列に基づいて障害物までの距離を算出する距離演算部17と、を備えている。
【0036】
本実施形態の障害物検知装置1は、上記第2の実施形態(図4)におけるサンプリング部3に代えて、サンプリング部3と同期検出部5とを備えたものである。上記第2の実施形態のサンプリング部3は第2の周波数によって送信信号と受信信号の両方を標本化して2つの標本値列を出力しているが、本実施形態のサンプリング部3は同期検出部5と組み合わせることにより受信信号のみを標本化して1つの標本値列を出力する。同期検出部5が出力する同期検出信号は、送信信号の標本値列に相当する情報である。そこで、サンプリング部3は、同期検出部5からの同期検出信号をトリガとして受信信号をサンプリング(標本化)すると共に、そのサンプリング点の個数nを順次加算し、上記第2の実施形態と同様に、受信信号について検出した同期点において最終の個数nを得て、その個数nを距離演算部17に出力する。距離演算部17は、上記第2の実施形態と同様に、L=c×Δts×n/2によって距離Lを求める。
【0037】
本実施形態のように、同期検出後にサンプリングを開始する手法においては、サンプリング前に容易に受波波形を平均化することができ、平均化によって距離測定精度をより向上させることができる。例えば2回平均を行う場合に、1回目の同期検出部5による同期検出後の所定時間(位相差を超える所定時間間隔)の受信信号の波形をRAMなどの記憶部に保存しておき、同期検出部5による2回目の同期検出後に、記憶部に記憶していた受信信号の波形と今回の波形とを足して2で割る平均化処理を行う。その後、サンプリング部3が、平均化処理された波形のサンプリングと同期検出を行って、位相差に相当する個数nを求めることができる。
【0038】
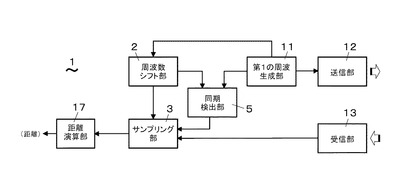
(第3の実施形態の変形例)
図9の変形例は、上記図8における第2の周波生成部14に代えて、周波数シフト部2を備えるものである。周波数シフト部2は、第1の周波生成部11が生成する送信信号の周波数をシフトすることにより、同期検出部5とサンプリング部3において用いる第2の周波数を持つ信号を生成する。本変形例によれば、周波生成部を1つだけ送信信号生成用の第1の周波生成部11として備えればよく、周波生成部が高価となる場合はコストダウンを見込むことができる。なお、上記図8における第1の周波生成部11に代えて、周波数シフト部2を備えることにより、第2の周波生成部14からの第2の周波数を持つ信号の周波数を周波数シフト部2によってシフトすることにより送信信号を生成するようにしてもよい。
【0039】
(第4の実施形態)
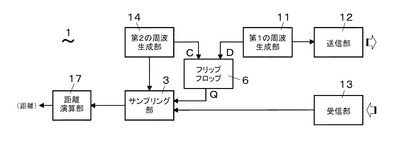
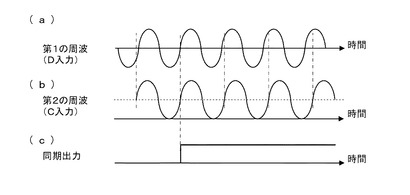
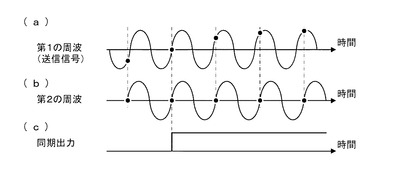
図10、図11は第4の実施形態について示す。図10に示すように、本実施形態の障害物検知装置1は、上記第3の実施形態(図8)における同期検出部5を、フリップフロップ6を用いて構成したものである。フリップフロップ6としてD型フリップフロップを用いると、クロック端子Cに入力された信号がLからHに変化した時に、データ端子Dの入力状態が端子Qから出力される。そこで、フリップフロップ6のデータ端子Dに第1の周波生成部11からの第1の周波数を持つ信号すなわち送信信号を入力し、クロック端子Cに第2の周波生成部14からの第2の周波数を持つ信号を入力する。すると、フリップフロップ6は、図11(a)(b)(c)に示すように、上記第3の実施形態と同様に送信信号と第2の周波数を持つ信号の位相ゼロの状態における「同期」を検出して、端子Qからサンプリング部3に向けて同期検出信号を出力する。図11(c)における同期出力は端子Qの出力を2値化したものである。クロック端子Cに入力する第2の周波数を持つ信号は、フリップフロップ6が信号のLとHを適切に認識できるように一定のDCオフセットを持たせている。
【0040】
(第5の実施形態)
図12、図13は第5の実施形態について示す。図12に示すように、本実施形態の障害物検知装置1は、上記第3の実施形態(図8)における同期検出部5の前段にADコンバータ4を備えている。ADコンバータ4は、第1および第2の周波生成部11,14から、第1の周波数を持つ信号(すなわち送信信号)および第2の周波数を持つ信号を入力され、これらの信号をデジタル化し、そのデジタル化したデータを同期検出部5に出力する。同期検出部5は、ADコンバータ4からのデータをソフトウエアによって処理することにより、上記第3の実施形態と同様に送信信号と第2の周波数を持つ信号の、例えば、位相ゼロの状態における「同期」を検出し、サンプリング部3に向けて同期検出信号を出力する。
【0041】
ADコンバータ4は、図13(a)(b)に示すように、第1の周波生成部11からの信号を、第2の周波生成部14からの信号のタイミングによってサンプリング処理すなわちデジタル化処理する。同期検出部5は、図13(a)(b)(c)に示すように、両周波数の信号の位相一致点を検出し、検出したときに同期検出信号を出力する。上記第4の実施形態のようにフリップフロップを使用した場合に温度や電源電圧変動の影響を受けるが、本実施形態のようにADコンバータ4を用いる場合はそれらの影響は軽微であり、より信頼性の高い同期検出ができる。
【0042】
(第6の実施形態)
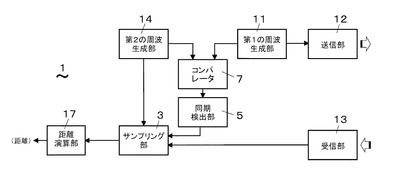
図14、図15は第6の実施形態について示す。図14に示すように、本実施形態の障害物検知装置1は、上記第3の実施形態(図8)における同期検出部5の前段に第1および第2の周波数を持つ信号を入力とするコンパレータ7を備え、同期検出部5は、コンパレータ7からの出力を用いて上記第3の実施形態と同様に送信信号と第2の周波数を持つ信号の、例えば、位相ゼロの状態における「同期」を検出し、サンプリング部3に向けて同期検出信号を出力する。コンパレータ7は、2つの入力値を比較した結果を出力するICであり、マイナス端子に入力された信号よりプラス端子に入力された信号の振幅値が大きければ、出力はHとなり、小さければ出力はLとなる。そこで、第1の周波生成部11からの第1の周波数を持つ信号(すなわち送信信号)をコンパレータ7のプラス端子に入力し、第2の周波生成部14からの信号をコンパレータ7のマイナス端子に入力する。信号レベルが同レベルでは出力が不定となるので、マイナス端子側には、予めオフセット電圧を設けておく。
【0043】
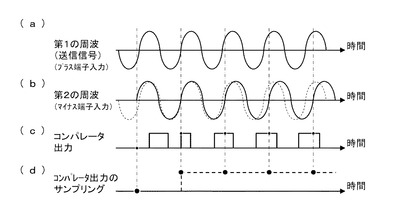
これにより、図15(a)(b)に示すように、送信信号および第2の周波数を持つ信号に対し、図15(c)に示すように、コンパレータ出力が得られる(図15(b)における破線は参考波形)。同期検出部5は、図15(d)に示すように、コンパレータ出力を第2の周波生成部14からの信号のタイミングによってサンプリングすることにより「同期」を検出し、サンプリング部3に向けて同期検出信号を出力する。なお、オフセット電圧の設定の仕方によっては、第1の周波と第2の周波の位相一致点の次の回のサンプリング時にコンパレータ7の出力がHとなる。そのため、距離演算部17において算出した距離を換算する必要がある。また、上記のように同期検出部5は、コンパレータ7の出力を第2の周波のタイミングでデータを取り込む際に、それぞれの周波の位相が一致した点において出力がLからHに変化するので、このタイミングで同期検出信号を出力すればよい。
【0044】
なお、本発明は、上記構成に限られることなく種々の変形が可能である。例えば、上述した各実施形態やそれらの変形例の構成を互いに組み合わせた構成とすることができる。また、上記実施形態では送信信号によって所定の搬送波を振幅変調することにより信号波を生成することとしているが、搬送波を用いることなく、送信信号(つまり第1の周波生成部11からの出力信号)そのものを信号波として空間に送信するようにしてもよい。
【符号の説明】
【0045】
1 障害物検知装置
2 周波数シフト部
3 サンプリング部
4 ADコンバータ
5 同期検出部
6 フリップフロップ
7 コンパレータ
11 第1の周波生成部
12 送信部
13 受信部
14 第2の周波生成部
15 第1のミキシング部
16 第2のミキシング部
17 距離演算部
【技術分野】
【0001】
本発明は、空間を伝播する信号波を用いて障害物を検知する障害物検知装置に関する。
【背景技術】
【0002】
従来から、マイクロ波などの空間を伝播する信号波を用いて障害物を検知することが行われている。例えば、送信回路からの高周波信号をOn/Offしてパルス化するとともに装置外部に向かって送波し、その送波の障害物による反射波を受信し、前記送信回路からの高周波信号と受信波とをミキシングするとともにAM検波し、得られた検波波形を微分回路で微分し、正の微分出力から反射波の立上りを検出して受波開始時刻を取得し、受波開始時刻と既知の送信開始時刻との時間差を取得し、時間差に基づいて物体までの距離を算出して障害物を検知する障害物検知装置が知られている(例えば、特許文献1参照)。この装置において、前記時間差の取得のために、のこぎり刃状の波形の電圧−時間変換処理を用いたり、サンプリングパルスのパルス数をカウントしたりする処理が行われている。
【0003】
ここで、図16、図17を参照して、パルスカウンタを用いて前記時間差を取得し、障害物までの距離を求める従来技術の一般的な例を説明する。時間差取得に関連する回路部分は、図16に示すように、送信部91、受信部92、クロック発生部93、およびカウンタ94を備えたものとなる。受波開始時刻は、例えば、上述のように微分出力などによって検出されているものとする。カウンタ94は、送信部91からの送波開始時刻の情報と受信部92からの受波開始時刻の情報とに基づいて、これらの時刻の間にクロック発生部93が発生したクロックパルス数(nとする)をカウントする。求める時間差δTは、図17(a)(b)に示すように、送信信号と受信信号の立上りの時刻の時間差であり、クロックパルスは、図17(c)に示すように、時間差δTよりも十分短い周期Tcの高周波(周波数fc=1/Tc)のパルス列である。図17(d)に示すように、カウンタ94によって時間差δTの測定値として、時間t1=n/fc=n×Tcが得られる。時間t1は信号波の障害物までの往復時間であり、障害物までの距離Lは、L=c×t1/2によって求められる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2002−365362号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、距離Lを求めるために、上述した特許文献1や図16、図17に示されるような時間差δTの測定値である時間t1を用いる障害物検知装置においては、距離精度をより向上するためにクロックパルスの周波数fcをより高周波化する必要がある。上述の距離L=c×t1/2におけるcは信号波(電波、光、超音波など)の伝播速度であり、信号波が電波や光の場合、c≒3×108mである。また、距離の誤差ΔLはΔL=c/fc/2となる。従って、例えばfc=150MHzの場合、ΔL=1mとなる。そして、距離の誤差ΔLを5cmまで向上するには、クロックパルスの周波数をfc=3GHzとする必要がある。電気回路は、一般に周波数が高いほど高価であり、実際の回路構成を高速化すると高価な回路構成となり、経済的ではないという問題がある。
【0006】
本発明は、上記課題を解消するものであって、簡単な構成により、光、電波、超音波等の信号波を用いて障害物までの距離を精度良く求めることができる低コストの障害物検知装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記課題を達成するために、本発明の障害物検知装置は、空間を伝播する信号波を用いて障害物を検知する障害物検知装置において、第1の周波数を持つ送信信号によって所定の搬送波を振幅変調することにより信号波を生成すると共にその信号波を空間に送信する送信部と、前記信号波の障害物からの反射波を受信して受信信号として出力する受信部と、前記送信信号と第2の周波数を持つ信号とを互いにミキシングして中間周波信号を出力する第1のミキシング部と、前記受信信号と前記第2の周波数を持つ信号とを互いにミキシングして中間周波信号を出力する第2のミキシング部と、前記第1および第2のミキシング部から出力される2つの中間周波信号に基づいて障害物までの距離を算出する距離演算部とを備えたことを特徴とする。
【0008】
この障害物検知装置において、第2の周波数を持つ信号は送信信号の周波数をシフトすることにより得ることが好ましい。
【0009】
この障害物検知装置において、第1および第2の周波数のいずれか一方または両方が可変であることが好ましい。
【0010】
また、本発明の障害物検知装置は、空間を伝播する信号波を用いて障害物を検知する障害物検知装置において、第1の周波数を持つ送信信号によって所定の搬送波を振幅変調することにより信号波を生成すると共にその信号波を空間に送信する送信部と、前記信号波の障害物からの反射波を受信して受信信号として出力する受信部と、前記送信信号と前記受信信号とをそれぞれ第2の周波数で標本化して2つの標本値列を出力するサンプリング部と、前記サンプリング部によって出力される前記2つの標本値列に基づいて障害物までの距離を算出する距離演算部とを備えたことを特徴とする。
【0011】
この障害物検知装置において、第2の周波数を持つ信号は送信信号の周波数をシフトすることにより得ることが好ましい。
【0012】
この障害物検知装置において、サンプリング部はADコンバータを用いることが好ましい。
【0013】
この障害物検知装置において、第1および第2の周波数のいずれか一方または両方が可変であることが好ましい。
【0014】
また、本発明の障害物検知装置は、空間を伝播する信号波を用いて障害物を検知する障害物検知装置において、第1の周波数を持つ送信信号によって所定の搬送波を振幅変調することにより信号波を生成すると共にその信号波を空間に送信する送信部と、前記信号波の障害物からの反射波を受信して受信信号として出力する受信部と、前記送信信号および後述の標本化に用いる第2の周波数を持つ信号の同期を検出して同期検出信号を出力する同期検出部と、前記同期検出信号を標本化開始のトリガとし、前記受信信号および前記第2の周波数を持つ信号の同期が検出されるまで前記受信信号を前記第2の周波数で標本化して標本値列を出力するサンプリング部と、前記標本値列に基づいて障害物までの距離を算出する距離演算部とを備えたことを特徴とする。
【0015】
この障害物検知装置において、第2の周波数を持つ信号は、送信信号の周波数をシフトすることにより得ることが好ましい。
【0016】
この障害物検知装置において、同期検出部はフリップフロップを用いて構成され、フリップフロップのデータ端子とクロック端子にそれぞれ送信信号および第2の周波数を持つ信号を入力することが好ましい。
【0017】
この障害物検知装置において、同期検出部は第1および第2の周波数を持つ信号をADコンバータによってデジタル化したデータをソフトウエアによって処理することにより同期を検出することが好ましい。
【0018】
この障害物検知装置において、同期検出部は第1および第2の周波数を持つ信号を入力とするコンパレータからの出力を用いて同期を検出することが好ましい。
【0019】
この障害物検知装置において、第1および第2の周波数のいずれか一方または両方が可変であることが好ましい。
【発明の効果】
【0020】
本発明の障害物検知装置によれば、低コストで簡単な構成により、光、電波、超音波等の信号波を用いて障害物までの距離を精度良く算出して障害物を検知することができる。
【図面の簡単な説明】
【0021】
【図1】本発明の第1の実施形態に係る障害物検知装置のブロック構成図。
【図2】(a)〜(e)は同装置の動作を説明するためのタイミングチャート。
【図3】同装置の変形例を示すブロック構成図。
【図4】第2の実施形態に係る障害物検知装置のブロック構成図。
【図5】(a)(b)(c)は同装置の動作を説明するためのタイミングチャート。
【図6】同装置の変形例を示すブロック構成図。
【図7】同装置の他の変形例を示すブロック構成図。
【図8】第3の実施形態に係る障害物検知装置のブロック構成図。
【図9】同装置の変形例を示すブロック構成図。
【図10】第4の実施形態に係る障害物検知装置のブロック構成図。
【図11】(a)(b)(c)は同装置の動作を説明するためのタイミングチャート。
【図12】第5の実施形態に係る障害物検知装置のブロック構成図。
【図13】(a)(b)(c)は同装置の動作を説明するためのタイミングチャート。
【図14】第6の実施形態に係る障害物検知装置のブロック構成図。
【図15】(a)〜(d)は同装置の動作を説明するためのタイミングチャート。
【図16】従来の障害物検知装置における一般的な時間差検出部のブロック構成図。
【図17】(a)〜(d)は同装置の動作を説明するためのタイミングチャート。
【発明を実施するための形態】
【0022】
以下、本発明の実施形態に係る障害物検知装置について、図面を参照して説明する。なお、図2(a)(b)に示す送信信号と受信信号は、以下の各実施形態における共通内容として適宜参照される。
(第1の実施形態)
図1、図2は第1の実施形態について示す。図1に示すように、本実施形態の障害物検知装置1は、第1の周波数を持つ送信信号を生成する第1の周波生成部11と、第1の周波生成部11からの送信信号によって所定の搬送波を振幅変調することにより信号波を生成すると共に、その信号波を空間に送信する送信部12と、信号波の障害物からの反射波を受信して受信信号として出力する受信部13と、第2の周波数を持つ信号を生成する第2の周波生成部14と、送信信号と第2の周波数を持つ信号とを互いにミキシングして中間周波信号を出力する第1のミキシング部15と、受信信号と第2の周波数を持つ信号とを互いにミキシングして中間周波信号を出力する第2のミキシング部16と、第1および第2のミキシング部15,16から出力される2つの中間周波信号に基づいて障害物までの距離を算出する距離演算部17と、を備えている。
【0023】
図1に加え、図2を参照して障害物検知装置1の動作を説明する。図2(a)〜(e)に示す各信号は、図1の第1の周波生成部11、受信部13、第1、第2のミキシング部15,16、および距離演算部17からそれぞれ出力される信号の例である。図2(a)(b)に示すように、送信信号は第1の周波数f1=1/Tを持つ正弦波であり、受信信号は、送信信号の送信開始から時間t経過後に、受信部13から出力されている。このような送信信号と受信信号は、それぞれ第2の周波数f2(ただし、f1≠f2)を持つ正弦波でミキシングしてローパスフィルタを通すことにより、図2(c)(d)に示すように、差|f1−f2|の周波数を持つ、より低周波数化された信号(中間周波信号)となる。なお、|*|は*の絶対値を示す。
【0024】
送信信号と受信信号の互いの位相の関係は、ミキシングによって中間周波信号とされた送信信号と受信信号とにおいても保存される。従って、ミキシング後の送信信号と受信信号の位相差、より一般的には、2つの中間周波信号の時間差tmとミキシング後の送信信号の周期Tmとは、上述のt,Tに対して、t/T=tm/Tm、の関係がある。時間差tmに注目すると、tm=t×(Tm/T)=t×(f1/fm)であり、f1=1/T、fm=|f1−f2|=1/Tmである。つまり、例えば、周波数を1/10000に変換(fm=f1/10000)したならば、時間tを10000倍に引き伸ばしたことと同等となる(tm=t×10000)。
【0025】
そこで、距離演算部17では、従来例で説明したような、のこぎり刃状の波形の電圧−時間変換処理を用いたり、サンプリングパルスのパルス数をカウントしたりする処理を行って、この時間差tmを精度良く測定することができる。そして、この時間差tmの測定値(τとする)と、測定値τを実際の測定値(時間tの測定値)に換算するための係数kとを用いて、障害物までの距離Lを、L=k×τ×c/2として求めることができる。ここで、cは送信波(電波、光、超音波など)の伝播速度であり、送信波が電波や光の場合、c≒3×108mである。また、係数kは、上述のtm=t×10000の場合には、k=1/10000である。距離演算部17は、時間差tmの測定に際し、図2(c)(d)における、例えば、各信号の立上り点を検出して2つの立上り点間の時間差を測定する方法や、ゼロクロス点を検出して2つのゼロクロス点間の時間差を測定する方法を用いて、容易に精度良く測定値τを得ることができる。距離演算部17は、このようにして時間差tmを測定し、距離Lや、距離Lに相当する測定値τなどの情報を出力する。
【0026】
上述のように、障害物検知装置1は、送信信号による振幅変調連続波(AM−CW)を信号波とし、送信信号と信号波の反射波による受信信号との時間差(タイム・オブ・フライト)または位相差を測定することにより反射物体である障害物までの距離を求め、距離を認識することによって障害物を検知する装置である。そして、この障害物検知装置1は、時間差や位相差を求める際に、送信信号と受信信号の両方を中間周波に変換することを特徴としている。本実施形態によれば、送信信号と受信信号の両方を中間周波に変換するという簡単な構成により、高価な高周波対応の回路構成を用いることなく低コストの構成によって、光、電波、超音波等の信号波を用いて障害物までの距離を精度良く求めることができ、その距離の測定によって障害物を検知することができる。なお、位相差による場合には、2πラジアンの整数倍に相当する不確定性を考慮する必要がある。
【0027】
(第1の実施形態の変形例)
図3は上述の第1の実施形態の変形例を示す。この障害物検知装置1は、上記第1の実施形態の図1における第2の周波生成部14に代えて、周波数シフト部2を備えるものである。周波数シフト部2は、第1の周波生成部11が生成する送信信号の周波数をシフトすることにより、第1および第2のミキシング部15,16において用いる第2の周波数を持つ信号を生成する。本変形例によれば、周波生成部を1つだけ、送信信号生成用の第1の周波生成部11として備えればよく、周波生成部が高価となる場合はコストダウンを見込むことができる。なお、上記図1における第1の周波生成部11に代えて、周波数シフト部2を備え、第2の周波生成部14からの第2の周波数を持つ信号の周波数を周波数シフト部2によってシフトすることにより送信信号を生成するようにしてもよい。
【0028】
(第1の実施形態の他の変形例)
上記第1の実施形態の図1における第1および第2の周波生成部11,14が生成する信号の第1および第2の周波数のいずれか一方または両方を可変としてもよい。また、図3における第1の周波生成部11および周波数シフト部2が生成する信号のいずれか一方または両方を可変としてもよい。例えば、第1の周波数f1を第2の周波数f2に比べて高い周波数とすればする程、検知結果をより早く出力することが可能となる。また、第1の周波数f1を低くして第2の周波数f2に近づければ近づける程、距離分解能が高くなり、より正確な測距が可能となる。一般に、このように周波数を変化させることにより、第1の周波数f1と第2の周波数f2の差fm=|f1−f2|を大きくすればする程、Tm従ってtmが短くなり、時間差tmをより短時間で測定できる。また、逆に、差fmを小さくすればする程、tmが長くなり、時間差tmをより精度良く測定できる。従って、障害物検知装置1を適用する状況に応じて、すなわち、検知速度優先か、測定精度優先かなどの選択肢に応じて、さらに、半固定的または動的に、周波数f1,f2を変化させることにより、適切な動作を実現することができる。周波数f1,f2のいずれか、または両方を可変とする構成は、以下に示す他の実施形態においても同様に適用でき、ここで示した変形例における効果と同様の効果が得られる。
【0029】
(第2の実施形態)
図4、図5は第2の実施形態について示す。図4に示すように、本実施形態の障害物検知装置1は、第1の周波数を持つ送信信号を生成する第1の周波生成部11と、前記送信信号によって所定の搬送波を振幅変調することにより信号波を生成すると共にその信号波を空間に送信する送信部12と、信号波の障害物からの反射波を受信して受信信号として出力する受信部13と、第2の周波数を持つ信号を生成する第2の周波生成部14と、送信信号と受信信号とをそれぞれ第2の周波数で標本化して2つの標本値列を出力するサンプリング部3と、サンプリング部3によって出力される2つの標本値列に基づいて障害物までの距離を算出する距離演算部17とを備えている。
【0030】
図4に加え、図5を参照して障害物検知装置1の動作を説明する。図5(a)(b)(c)に示す各信号は、図4の第1の周波生成部11、第2の周波生成部14、およびサンプリング部3からそれぞれ出力される信号の例である。送信信号は、図5(a)に示すように、第1の周波数(f1=1/Tとする)を持つ正弦波である。受信信号は送信信号と同じ周波数f1の正弦波であり、送信信号の送信開始から時間差t後に受信部13から出力される(第1の実施形態の図2(a)(b)参照)。第2の周波生成部14が出力する信号は、図5(b)に示すように、受信信号の周波数f1に対して標本化のタイミングが時間差Δtsずつ進む信号(周波数f2=1/T2とする)とされている。つまり、Δts=T2−T=1/f2−1/f1である。第2の周波生成部14は、標本化のためのタイミングパルスを出力するものであればよい。
【0031】
上述のような周波数f2の信号によって送信信号を標本化すると、図5(c)に示すようなサンプリング出力(標本値列)が得られる。この標本値列は、第1の実施形態で示した、送信信号と周波数f2の正弦波とをミキシングして得られる中間周波に相当する。また、受信信号を周波数f2の信号波によって標本化することにより、受信信号と周波数f2の正弦波とをミキシングして得られる中間周波に相当する標本値列が得られる。従って、サンプリング部3によって出力される2つの標本値列の時間のずれ(第1の実施形態における時間差tmに相当)を測定することにより、その測定値に基づいて、すなわち、第1の実施形態における測定値τと係数kとに基づいて、障害物までの距離Lを求めることができる。しかしながら、本実施形態においては、測定値τと係数kとに代えて、時間差tmにおけるサンプリング信号の個数nと、時間差Δtsとを用いて、障害物までの距離Lを求めることができる。
【0032】
例えば、測定値τを求める方法として位相差による方法を用いる場合、位相差がn個のサンプリング信号に相当するという結果が得られるとτ=Δts×nとなり、距離Lは、L=c×τ/2=c×Δts×n/2によって求められる。本方式に基づく距離の誤差ΔL(最大誤差)は、例えばf1=2.5015625MHz、f2=2.5MHzとし、信号波を電波(c≒3.0×108m)とした場合、ΔL=c×Δts/2=(1/f2−1/f1)×c/2=3.75cm(=0.25ns)となる。また、各標本値列における互いの同位相点を求める際に、各標本列をフィッティングした曲線を用いたり、ゼロクロス点を挟む2点間の線分の比例配分点を用いたりして量子化による誤差を減らすことができる。また、2つの標本値列の相互相関関数から位相差を求めてもよい。この場合、大域的な判断ができるので、局所的な信号変動に左右されることなく、より精度良く位相差を求めることができる。また、各標本値列における位相ゼロの位置や位相πの位置は、例えば、隣り合う2つの標本値の符号の変化やゼロからの増減によって検出することができる。
【0033】
また、上記2つの周波数f1,f2の設定に際し、一方の周波数が他方の周波数に対して、ある周期毎に正確に同期する周波数を選択することにより、2つの標本値列のそれぞれにおける特定の「同期」したサンプリング信号の検出によって、容易に上記個数nを求めることができる。すなわち、周波数f1を持つ送信信号と第2の周波数f2を持つ信号が、ある瞬間にそれぞれ任意に設定したある特定の位相値を持つ状態を「同期」状態と定義し、その時刻を同期時刻とする。例えば、正弦波における位相値ゼロを、両信号のそれぞれの特定の位相値とすれば、両信号の波形が同時に立上る状態が「同期」状態であり、その時刻が同期時刻である。そこで、第2の周波数f2を持つ信号と送信信号との同期を検出し、その後、引き続いて送信信号の場合と同様に、第2の周波数f2を持つ信号と受信信号との最初の同期を検出する。つまり、「同期」状態におけるサンプリング点を2つの標本値列のそれぞれにおいて1点づつ検出する。送信信号に対して検出した同期点において個数nを0とし、その後、サンプリング点(サンプリング信号)毎に個数nを加算し、受信信号に対して検出した同期点において最終の個数nが得られたとする。この個数nが、送信信号と受信信号の位相差に相当する。本実施形態によれば、第1の実施形態における第1および第2のミキシング部15,16が不要になり、サンプリング部3のコストとの兼ね合いによって、コストダウンを見込むことができる。
【0034】
(第2の実施形態の2つの変形例)
図6、図7は上記第2の実施形態の変形例を示す。図6の変形例は、上記第2の実施形態の図4における第2の周波生成部14に代えて、周波数シフト部2を備えるものである。この構成の障害物検知装置1の動作や効果は、第1の実施形態における変形例(図3)について説明した内容と同様である。すなわち、本変形例は第2の周波生成部を備えないので、第2の周波生成部14(パルス生成部)が高価となる場合は、コストダウンを見込むことができる。また、図7の変形例は、上記第2の実施形態におけるサンプリング部3をADコンバータ(ADC)を用いて構成するものである。
【0035】
(第3の実施形態)
図8、図9は第4の実施形態とその変形例について示す。図8に示すように、本実施形態の障害物検知装置1は、第1の周波数を持つ送信信号を生成する第1の周波生成部11と、前記送信信号によって所定の搬送波を振幅変調することにより信号波を生成すると共に、その信号波を空間に送信する送信部12と、信号波の障害物からの反射波を受信して受信信号として出力する受信部13と、第2の周波数を持つ信号を生成する第2の周波生成部14と、送信信号と第2の周波数を持つ信号との同期を検出して同期検出信号を出力する同期検出部5と、同期検出信号を標本化開始のトリガとし、受信信号と第2の周波数を持つ信号との同期が検出されるまで受信信号を第2の周波数で標本化して標本値列を出力するサンプリング部3と、標本値列に基づいて障害物までの距離を算出する距離演算部17と、を備えている。
【0036】
本実施形態の障害物検知装置1は、上記第2の実施形態(図4)におけるサンプリング部3に代えて、サンプリング部3と同期検出部5とを備えたものである。上記第2の実施形態のサンプリング部3は第2の周波数によって送信信号と受信信号の両方を標本化して2つの標本値列を出力しているが、本実施形態のサンプリング部3は同期検出部5と組み合わせることにより受信信号のみを標本化して1つの標本値列を出力する。同期検出部5が出力する同期検出信号は、送信信号の標本値列に相当する情報である。そこで、サンプリング部3は、同期検出部5からの同期検出信号をトリガとして受信信号をサンプリング(標本化)すると共に、そのサンプリング点の個数nを順次加算し、上記第2の実施形態と同様に、受信信号について検出した同期点において最終の個数nを得て、その個数nを距離演算部17に出力する。距離演算部17は、上記第2の実施形態と同様に、L=c×Δts×n/2によって距離Lを求める。
【0037】
本実施形態のように、同期検出後にサンプリングを開始する手法においては、サンプリング前に容易に受波波形を平均化することができ、平均化によって距離測定精度をより向上させることができる。例えば2回平均を行う場合に、1回目の同期検出部5による同期検出後の所定時間(位相差を超える所定時間間隔)の受信信号の波形をRAMなどの記憶部に保存しておき、同期検出部5による2回目の同期検出後に、記憶部に記憶していた受信信号の波形と今回の波形とを足して2で割る平均化処理を行う。その後、サンプリング部3が、平均化処理された波形のサンプリングと同期検出を行って、位相差に相当する個数nを求めることができる。
【0038】
(第3の実施形態の変形例)
図9の変形例は、上記図8における第2の周波生成部14に代えて、周波数シフト部2を備えるものである。周波数シフト部2は、第1の周波生成部11が生成する送信信号の周波数をシフトすることにより、同期検出部5とサンプリング部3において用いる第2の周波数を持つ信号を生成する。本変形例によれば、周波生成部を1つだけ送信信号生成用の第1の周波生成部11として備えればよく、周波生成部が高価となる場合はコストダウンを見込むことができる。なお、上記図8における第1の周波生成部11に代えて、周波数シフト部2を備えることにより、第2の周波生成部14からの第2の周波数を持つ信号の周波数を周波数シフト部2によってシフトすることにより送信信号を生成するようにしてもよい。
【0039】
(第4の実施形態)
図10、図11は第4の実施形態について示す。図10に示すように、本実施形態の障害物検知装置1は、上記第3の実施形態(図8)における同期検出部5を、フリップフロップ6を用いて構成したものである。フリップフロップ6としてD型フリップフロップを用いると、クロック端子Cに入力された信号がLからHに変化した時に、データ端子Dの入力状態が端子Qから出力される。そこで、フリップフロップ6のデータ端子Dに第1の周波生成部11からの第1の周波数を持つ信号すなわち送信信号を入力し、クロック端子Cに第2の周波生成部14からの第2の周波数を持つ信号を入力する。すると、フリップフロップ6は、図11(a)(b)(c)に示すように、上記第3の実施形態と同様に送信信号と第2の周波数を持つ信号の位相ゼロの状態における「同期」を検出して、端子Qからサンプリング部3に向けて同期検出信号を出力する。図11(c)における同期出力は端子Qの出力を2値化したものである。クロック端子Cに入力する第2の周波数を持つ信号は、フリップフロップ6が信号のLとHを適切に認識できるように一定のDCオフセットを持たせている。
【0040】
(第5の実施形態)
図12、図13は第5の実施形態について示す。図12に示すように、本実施形態の障害物検知装置1は、上記第3の実施形態(図8)における同期検出部5の前段にADコンバータ4を備えている。ADコンバータ4は、第1および第2の周波生成部11,14から、第1の周波数を持つ信号(すなわち送信信号)および第2の周波数を持つ信号を入力され、これらの信号をデジタル化し、そのデジタル化したデータを同期検出部5に出力する。同期検出部5は、ADコンバータ4からのデータをソフトウエアによって処理することにより、上記第3の実施形態と同様に送信信号と第2の周波数を持つ信号の、例えば、位相ゼロの状態における「同期」を検出し、サンプリング部3に向けて同期検出信号を出力する。
【0041】
ADコンバータ4は、図13(a)(b)に示すように、第1の周波生成部11からの信号を、第2の周波生成部14からの信号のタイミングによってサンプリング処理すなわちデジタル化処理する。同期検出部5は、図13(a)(b)(c)に示すように、両周波数の信号の位相一致点を検出し、検出したときに同期検出信号を出力する。上記第4の実施形態のようにフリップフロップを使用した場合に温度や電源電圧変動の影響を受けるが、本実施形態のようにADコンバータ4を用いる場合はそれらの影響は軽微であり、より信頼性の高い同期検出ができる。
【0042】
(第6の実施形態)
図14、図15は第6の実施形態について示す。図14に示すように、本実施形態の障害物検知装置1は、上記第3の実施形態(図8)における同期検出部5の前段に第1および第2の周波数を持つ信号を入力とするコンパレータ7を備え、同期検出部5は、コンパレータ7からの出力を用いて上記第3の実施形態と同様に送信信号と第2の周波数を持つ信号の、例えば、位相ゼロの状態における「同期」を検出し、サンプリング部3に向けて同期検出信号を出力する。コンパレータ7は、2つの入力値を比較した結果を出力するICであり、マイナス端子に入力された信号よりプラス端子に入力された信号の振幅値が大きければ、出力はHとなり、小さければ出力はLとなる。そこで、第1の周波生成部11からの第1の周波数を持つ信号(すなわち送信信号)をコンパレータ7のプラス端子に入力し、第2の周波生成部14からの信号をコンパレータ7のマイナス端子に入力する。信号レベルが同レベルでは出力が不定となるので、マイナス端子側には、予めオフセット電圧を設けておく。
【0043】
これにより、図15(a)(b)に示すように、送信信号および第2の周波数を持つ信号に対し、図15(c)に示すように、コンパレータ出力が得られる(図15(b)における破線は参考波形)。同期検出部5は、図15(d)に示すように、コンパレータ出力を第2の周波生成部14からの信号のタイミングによってサンプリングすることにより「同期」を検出し、サンプリング部3に向けて同期検出信号を出力する。なお、オフセット電圧の設定の仕方によっては、第1の周波と第2の周波の位相一致点の次の回のサンプリング時にコンパレータ7の出力がHとなる。そのため、距離演算部17において算出した距離を換算する必要がある。また、上記のように同期検出部5は、コンパレータ7の出力を第2の周波のタイミングでデータを取り込む際に、それぞれの周波の位相が一致した点において出力がLからHに変化するので、このタイミングで同期検出信号を出力すればよい。
【0044】
なお、本発明は、上記構成に限られることなく種々の変形が可能である。例えば、上述した各実施形態やそれらの変形例の構成を互いに組み合わせた構成とすることができる。また、上記実施形態では送信信号によって所定の搬送波を振幅変調することにより信号波を生成することとしているが、搬送波を用いることなく、送信信号(つまり第1の周波生成部11からの出力信号)そのものを信号波として空間に送信するようにしてもよい。
【符号の説明】
【0045】
1 障害物検知装置
2 周波数シフト部
3 サンプリング部
4 ADコンバータ
5 同期検出部
6 フリップフロップ
7 コンパレータ
11 第1の周波生成部
12 送信部
13 受信部
14 第2の周波生成部
15 第1のミキシング部
16 第2のミキシング部
17 距離演算部
【特許請求の範囲】
【請求項1】
空間を伝播する信号波を用いて障害物を検知する障害物検知装置において、
第1の周波数を持つ送信信号によって所定の搬送波を振幅変調することにより信号波を生成すると共にその信号波を空間に送信する送信部と、
前記信号波の障害物からの反射波を受信して受信信号として出力する受信部と、
前記送信信号と第2の周波数を持つ信号とを互いにミキシングして中間周波信号を出力する第1のミキシング部と、
前記受信信号と前記第2の周波数を持つ信号とを互いにミキシングして中間周波信号を出力する第2のミキシング部と、
前記第1および第2のミキシング部から出力される2つの中間周波信号に基づいて障害物までの距離を算出する距離演算部とを備えたことを特徴とする障害物検知装置。
【請求項2】
前記第2の周波数を持つ信号は、前記送信信号の周波数をシフトすることにより得ることを特徴とする請求項1に記載の障害物検知装置。
【請求項3】
前記第1の周波数は可変であることを特徴とする請求項1または請求項2に記載の障害物検知装置。
【請求項4】
前記第2の周波数は可変であることを特徴とする請求項1または請求項2に記載の障害物検知装置。
【請求項5】
前記第1および第2の周波数は可変であることを特徴とする請求項1または請求項2に記載の障害物検知装置。
【請求項6】
空間を伝播する信号波を用いて障害物を検知する障害物検知装置において、
第1の周波数を持つ送信信号によって所定の搬送波を振幅変調することにより信号波を生成すると共にその信号波を空間に送信する送信部と、
前記信号波の障害物からの反射波を受信して受信信号として出力する受信部と、
前記送信信号と前記受信信号とをそれぞれ第2の周波数で標本化して2つの標本値列を出力するサンプリング部と、
前記サンプリング部によって出力される前記2つの標本値列に基づいて障害物までの距離を算出する距離演算部とを備えたことを特徴とする障害物検知装置。
【請求項7】
前記第2の周波数を持つ信号は、前記送信信号の周波数をシフトすることにより得ることを特徴とする請求項6に記載の障害物検知装置。
【請求項8】
前記サンプリング部はADコンバータを用いることを特徴とする請求項6または請求項7に記載の障害物検知装置。
【請求項9】
前記第1の周波数は可変であることを特徴とする請求項6乃至請求項8のいずれか一項に記載の障害物検知装置。
【請求項10】
前記第2の周波数は可変であることを特徴とする請求項6乃至請求項8のいずれか一項に記載の障害物検知装置。
【請求項11】
前記第1および第2の周波数は可変であることを特徴とする請求項6乃至請求項8のいずれか一項に記載の障害物検知装置。
【請求項12】
空間を伝播する信号波を用いて障害物を検知する障害物検知装置において、
第1の周波数を持つ送信信号によって所定の搬送波を振幅変調することにより信号波を生成すると共にその信号波を空間に送信する送信部と、
前記信号波の障害物からの反射波を受信して受信信号として出力する受信部と、
前記送信信号と標本化に用いる第2の周波数を持つ信号との同期を検出して同期検出信号を出力する同期検出部と、
前記同期検出信号を標本化開始のトリガとし、前記受信信号と前記第2の周波数を持つ信号との同期が検出されるまで前記受信信号を前記第2の周波数で標本化して標本値列を出力するサンプリング部と、
前記標本値列に基づいて障害物までの距離を算出する距離演算部とを備えたことを特徴とする障害物検知装置。
【請求項13】
前記第2の周波数を持つ信号は、前記送信信号の周波数をシフトすることにより得ることを特徴とする請求項12に記載の障害物検知装置。
【請求項14】
前記同期検出部は、フリップフロップを用いて構成され、前記フリップフロップのデータ端子とクロック端子にそれぞれ前記送信信号および前記第2の周波数を持つ信号を入力することを特徴とする請求項12または請求項13に記載の障害物検知装置。
【請求項15】
前記同期検出部は、前記送信信号および第2の周波数を持つ信号をADコンバータによってデジタル化したデータをソフトウエアによって処理することにより前記同期を検出することを特徴とする請求項12または請求項13に記載の障害物検知装置。
【請求項16】
前記同期検出部は、前記送信信号および第2の周波数を持つ信号を入力とするコンパレータからの出力を用いて前記同期を検出することを特徴とする請求項12または請求項13に記載の障害物検知装置。
【請求項17】
前記第1の周波数は可変であることを特徴とする請求項12乃至請求項16のいずれか一項に記載の障害物検知装置。
【請求項18】
前記第2の周波数は可変であることを特徴とする請求項12乃至請求項16のいずれか一項に記載の障害物検知装置。
【請求項19】
前記第1および第2の周波数は可変であることを特徴とする請求項12乃至請求項16のいずれか一項に記載の障害物検知装置。
【請求項1】
空間を伝播する信号波を用いて障害物を検知する障害物検知装置において、
第1の周波数を持つ送信信号によって所定の搬送波を振幅変調することにより信号波を生成すると共にその信号波を空間に送信する送信部と、
前記信号波の障害物からの反射波を受信して受信信号として出力する受信部と、
前記送信信号と第2の周波数を持つ信号とを互いにミキシングして中間周波信号を出力する第1のミキシング部と、
前記受信信号と前記第2の周波数を持つ信号とを互いにミキシングして中間周波信号を出力する第2のミキシング部と、
前記第1および第2のミキシング部から出力される2つの中間周波信号に基づいて障害物までの距離を算出する距離演算部とを備えたことを特徴とする障害物検知装置。
【請求項2】
前記第2の周波数を持つ信号は、前記送信信号の周波数をシフトすることにより得ることを特徴とする請求項1に記載の障害物検知装置。
【請求項3】
前記第1の周波数は可変であることを特徴とする請求項1または請求項2に記載の障害物検知装置。
【請求項4】
前記第2の周波数は可変であることを特徴とする請求項1または請求項2に記載の障害物検知装置。
【請求項5】
前記第1および第2の周波数は可変であることを特徴とする請求項1または請求項2に記載の障害物検知装置。
【請求項6】
空間を伝播する信号波を用いて障害物を検知する障害物検知装置において、
第1の周波数を持つ送信信号によって所定の搬送波を振幅変調することにより信号波を生成すると共にその信号波を空間に送信する送信部と、
前記信号波の障害物からの反射波を受信して受信信号として出力する受信部と、
前記送信信号と前記受信信号とをそれぞれ第2の周波数で標本化して2つの標本値列を出力するサンプリング部と、
前記サンプリング部によって出力される前記2つの標本値列に基づいて障害物までの距離を算出する距離演算部とを備えたことを特徴とする障害物検知装置。
【請求項7】
前記第2の周波数を持つ信号は、前記送信信号の周波数をシフトすることにより得ることを特徴とする請求項6に記載の障害物検知装置。
【請求項8】
前記サンプリング部はADコンバータを用いることを特徴とする請求項6または請求項7に記載の障害物検知装置。
【請求項9】
前記第1の周波数は可変であることを特徴とする請求項6乃至請求項8のいずれか一項に記載の障害物検知装置。
【請求項10】
前記第2の周波数は可変であることを特徴とする請求項6乃至請求項8のいずれか一項に記載の障害物検知装置。
【請求項11】
前記第1および第2の周波数は可変であることを特徴とする請求項6乃至請求項8のいずれか一項に記載の障害物検知装置。
【請求項12】
空間を伝播する信号波を用いて障害物を検知する障害物検知装置において、
第1の周波数を持つ送信信号によって所定の搬送波を振幅変調することにより信号波を生成すると共にその信号波を空間に送信する送信部と、
前記信号波の障害物からの反射波を受信して受信信号として出力する受信部と、
前記送信信号と標本化に用いる第2の周波数を持つ信号との同期を検出して同期検出信号を出力する同期検出部と、
前記同期検出信号を標本化開始のトリガとし、前記受信信号と前記第2の周波数を持つ信号との同期が検出されるまで前記受信信号を前記第2の周波数で標本化して標本値列を出力するサンプリング部と、
前記標本値列に基づいて障害物までの距離を算出する距離演算部とを備えたことを特徴とする障害物検知装置。
【請求項13】
前記第2の周波数を持つ信号は、前記送信信号の周波数をシフトすることにより得ることを特徴とする請求項12に記載の障害物検知装置。
【請求項14】
前記同期検出部は、フリップフロップを用いて構成され、前記フリップフロップのデータ端子とクロック端子にそれぞれ前記送信信号および前記第2の周波数を持つ信号を入力することを特徴とする請求項12または請求項13に記載の障害物検知装置。
【請求項15】
前記同期検出部は、前記送信信号および第2の周波数を持つ信号をADコンバータによってデジタル化したデータをソフトウエアによって処理することにより前記同期を検出することを特徴とする請求項12または請求項13に記載の障害物検知装置。
【請求項16】
前記同期検出部は、前記送信信号および第2の周波数を持つ信号を入力とするコンパレータからの出力を用いて前記同期を検出することを特徴とする請求項12または請求項13に記載の障害物検知装置。
【請求項17】
前記第1の周波数は可変であることを特徴とする請求項12乃至請求項16のいずれか一項に記載の障害物検知装置。
【請求項18】
前記第2の周波数は可変であることを特徴とする請求項12乃至請求項16のいずれか一項に記載の障害物検知装置。
【請求項19】
前記第1および第2の周波数は可変であることを特徴とする請求項12乃至請求項16のいずれか一項に記載の障害物検知装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2011−196924(P2011−196924A)
【公開日】平成23年10月6日(2011.10.6)
【国際特許分類】
【出願番号】特願2010−66238(P2010−66238)
【出願日】平成22年3月23日(2010.3.23)
【出願人】(000005832)パナソニック電工株式会社 (17,916)
【Fターム(参考)】
【公開日】平成23年10月6日(2011.10.6)
【国際特許分類】
【出願日】平成22年3月23日(2010.3.23)
【出願人】(000005832)パナソニック電工株式会社 (17,916)
【Fターム(参考)】
[ Back to top ]