
障害物検知装置
【課題】光、電波、超音波等の信号波を用いる障害物検知装置において、低コストな構成により、障害物までの距離を精度良く測定可能とする。
【解決手段】本装置1は、正弦波状の信号波を生成する信号生成部2と、信号波を送信する送信部3と、信号波の対象物からの反射波を受信する受信部4と、サンプリング部5と、演算部6とを備える。サンプリング部5は、受信部4で受信された反射波の信号強度を標本化して標本列を取得する。演算部6は、標本列における同位相標本点毎の平均値を求め、平均値のうち互いに位相が90°異なる2つの平均値に基づいて信号波と反射波の位相差θを求める。標本列の平均値を求める統計処理に基づくので、ノイズなどの測定上の影響の少ない位相差を求めることができる。また、位相差に基づいて距離を求めるので、高価な高速回路によらずに障害物までの距離を精度良く求めることができ、低コストの障害物検知装置を実現できる。
【解決手段】本装置1は、正弦波状の信号波を生成する信号生成部2と、信号波を送信する送信部3と、信号波の対象物からの反射波を受信する受信部4と、サンプリング部5と、演算部6とを備える。サンプリング部5は、受信部4で受信された反射波の信号強度を標本化して標本列を取得する。演算部6は、標本列における同位相標本点毎の平均値を求め、平均値のうち互いに位相が90°異なる2つの平均値に基づいて信号波と反射波の位相差θを求める。標本列の平均値を求める統計処理に基づくので、ノイズなどの測定上の影響の少ない位相差を求めることができる。また、位相差に基づいて距離を求めるので、高価な高速回路によらずに障害物までの距離を精度良く求めることができ、低コストの障害物検知装置を実現できる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、反射波を用いて障害物を検知する障害物検知装置に関する。
【背景技術】
【0002】
従来から、マイクロ波などの空間を伝播する信号波を用いて障害物を検知することが行われている。例えば、送信回路からの高周波信号をOn/Offしてパルス化するとともに装置外部に向けて送波し、その送波の障害物からの反射波を受信し、送信回路からの高周波信号と受信波とをミキシングするとともにAM検波する。得られた検波波形を微分回路で微分し、正の微分出力から反射波の立上りを検出して受波開始時刻を取得し、送信開始時刻との時間差に基づいて物体までの距離を算出して障害物を検知する障害物検知装置が知られている(例えば、特許文献1参照)。この装置において、時間差の取得のために、のこぎり刃状の波形の電圧−時間変換処理を用いたり、サンプリングパルスのパルス数をカウントしたりする処理が行われている。
【0003】
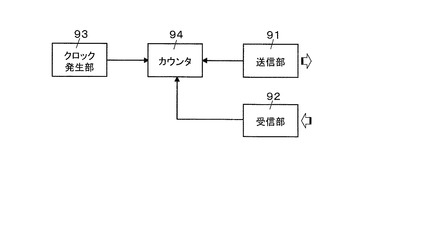
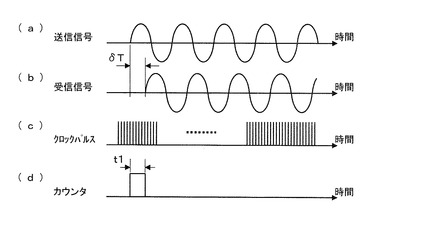
ここで、図12、図13を参照して、パルスカウンタを用いて時間差を取得し、障害物までの距離を求める従来技術の一般的な例を説明する。時間差取得に関連する回路部分は、図12に示すように、送信部91、受信部92、クロック発生部93、およびカウンタ94を備えたものとなる。受波開始時刻は、例えば、上述のように微分出力などによって検出されているものとする。カウンタ94は、送信部91からの送波開始時刻の情報と受信部92からの受波開始時刻の情報とに基づいて、これらの時刻の間にクロック発生部93が発生したクロックパルス数(nとする)をカウントする。求める時間差δTは、図13(a)(b)に示すように、送信信号と受信信号の立上りの時刻の時間差であり、クロックパルスは、図13(c)に示すように、時間差δTよりも十分短い周期Tcの高周波(周波数fc=1/Tc)のパルス列である。図13(d)に示すように、カウンタ94によって時間差δTの測定値として、時間t1=n/fc=n×Tcが得られる。時間t1は信号波の障害物までの往復時間であり、信号波(電波、光、超音波など)の伝播速度cを用いて、障害物までの距離Lは、L=c×t1/2によって求められる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2002−365362号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、距離Lを求めるために、上述した特許文献1や図12、図13に示されるような時間差δTの測定値である時間t1を用いる障害物検知装置においては、距離精度をより向上するためにクロックパルスの周波数fcをより高周波化する必要がある。上述の距離L=c×t1/2における信号波の伝播速度cは、信号波が電波や光の場合、c≒3×108mである。また、距離の誤差ΔLはΔL=c/fc/2となる。従って、例えばfc=150MHzの場合、ΔL=1mとなる。そして、距離の誤差ΔLを5cmまで向上するには、クロックパルスの周波数をfc=3GHzとする必要がある。電気回路は、一般に周波数が高いほど高価であり、実際の回路構成を高速化すると高価な回路構成となり、経済的ではないという問題がある。
【0006】
本発明は、上記課題を解消するものであって、光、電波、超音波等の信号波とその反射波とを用いて障害物までの距離を精度良く求めることができる低コストの障害物検知装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記課題を達成するために、本発明の障害物検知装置は、反射波を含む2波の位相差を求めることにより対象物までの距離を求める障害物検知装置において、正弦波状の信号波を生成する信号生成部と、信号生成部により生成された信号波を対象物に向けて送信する送信部と、送信部から送信された信号波の対象物からの反射波を受信する受信部と、受信部により受信された反射波の信号強度を標本化して標本列を取得するサンプリング部と、標本列における同位相標本点毎の平均値を求め、平均値のうち互いに位相が90°異なる2つの平均値に基づいて信号波と反射波の位相差を求める演算部と、を備えることを特徴とする。
【0008】
この障害物検知装置において、信号生成部により生成された信号波または受信部により受信された反射波の位相を90°ずらす位相シフト部を備え、サンプリング部は、第1および第2のサンプリング部を有し、第1のサンプリング部は、信号生成部により生成された信号波の周期毎に反射波の信号強度を標本化して第1の標本列を取得し、第2のサンプリング部は、位相シフト部によって信号波または反射波のいずれか一方の位相を90°ずらした上で信号波の周期毎に反射波の信号強度を標本化して第2の標本列を取得し、演算部は、第1および第2の標本列のそれぞれの平均値を求め、これらの平均値に基づいて信号波と反射波の位相差を求めることが好ましい。
【0009】
これらの障害物検知装置において、信号生成部により生成された信号波の周波数を逓倍してなる逓倍波を生成する逓倍部を備え、サンプリング部は、逓倍波の周期毎に反射波の信号強度を標本化して標本列を取得することが好ましい。
【0010】
これらの障害物検知装置において、サンプリング部は、標本化に用いるADコンバータを備えていることが好ましい。
【0011】
これらの障害物検知装置において、信号生成部は、生成する信号波の周波数を2種類以上の周波数間で切り替え自在であることが好ましい。
【発明の効果】
【0012】
本発明の障害物検知装置によれば、位相が異なる2系列の標本列の各平均値に基づいて信号波と受信波との位相差を求めるので、高価な高速回路によらずに位相差、従って障害物までの距離を精度良く求めることができ、低コストの障害物検知装置を実現できる。
【図面の簡単な説明】
【0013】
【図1】本発明の第1の実施形態に係る障害物検知装置のブロック構成図。
【図2】(a)(b)は同装置の動作を説明するためのタイミングチャート。
【図3】第2の実施形態に係る障害物検知装置のブロック構成図。
【図4】同装置の変形例を示すブロック構成図。
【図5】第3の実施形態に係る障害物検知装置のブロック構成図。
【図6】(a)(b)(c)は同装置の動作を説明するためのタイミングチャート。
【図7】同装置の変形例を示すブロック構成図。
【図8】同装置の他の変形例を示すブロック構成図。
【図9】第4の実施形態に係る障害物検知装置のブロック構成図。
【図10】同装置の変形例を示すブロック構成図。
【図11】第5の実施形態に係る障害物検知装置のブロック構成図。
【図12】従来の障害物検知装置における一般的な時間差検出部のブロック構成図。
【図13】(a)〜(d)は同装置の動作を説明するためのタイミングチャート。
【発明を実施するための形態】
【0014】
(第1の実施形態)
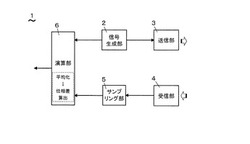
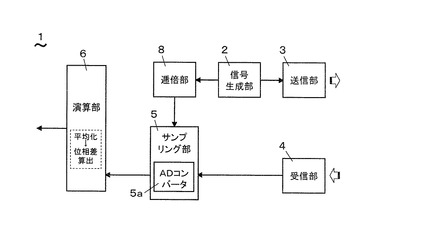
以下、本発明の実施形態に係る障害物検知装置について、図面を参照して説明する。図1、図2は第1の実施形態を示す。図1に示すように、本実施形態の障害物検知装置1は、正弦波状の信号波を生成する信号生成部2と、信号波を対象物に向けて送信する送信部3と、信号波の対象物からの反射波を受信する受信部4と、サンプリング部5と、演算部6と、を備える。サンプリング部5は、受信部4で受信された反射波の信号強度を標本化して標本列を取得する。演算部6は、標本列における同位相の標本点毎の信号強度の平均値を求め、平均値のうち互いに位相が90°異なる2つの平均値に基づいて信号波と反射波の位相差(θとする)を求める。障害物検知装置1は、反射波を含む2波、すなわち、送信波と反射波(受信波)の位相差θを測定し、その位相差θと信号波の既知の伝搬速度とから反射体である障害物までの距離を求めること、すなわち障害物を検知することができる。
【0015】
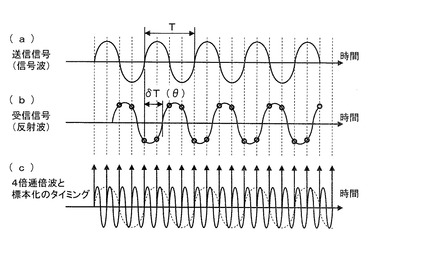
図2(a)(b)に示すように、送信信号(送信波)は適宜波数分の連続正弦波であり、受信信号(反射波)は送信部3から反射体を経由して受信部4に至る経路長に相当する時間差δTだけ遅延した信号である。送信波の周期を周期Tとすると、時間差δTを用いて、位相差θ=2π×δT/T(ラジアン)となり、逆に時間差δT=T×θ/(2π)となる。サンプリング部5は、互いに位相が90°(π/2ラジアン)異なる2系列の標本列を取得する。各標本列における標本点は、反射波中の同一位相状態における測定値(受信信号強度値)であり、周期T毎の測定値、または周期Tの整数倍毎の測定値である。図2(b)において、図中に白丸で示す測定点のうち、上側の測定点の系列と、下側測定点の系列が、互いに位相が90°異なる標本列である。演算部6は、各標本列における測定値の平均値(それぞれV0,V1とする)を求める。
【0016】
次に、平均値V0,V1から、位相差θを求め、障害物までの距離Lを求める方法を説明する。信号波の角周波数をω、初期位相をα、時間変数をtとし、位相差θを用いて、信号波S=A×sin(ωt+α)、反射波R=B×sin(ωt+α+θ)、とする。上述のV0,V1は、下式のように表される。ここでβは、サンプリング開始のタイミングに依存するパラメータであり、一般的に既知、または、設定によりβ=0とすることができる。演算部6は、下記のように、位相差θ、従って時間差δTを算出し、信号波の伝播速度cを用いて距離Lを算出する。
V0=B×sin(β+θ)、
V1=B×sin(β+θ−π/2)=B×cos(β+θ)。
V0/V1=tan(β+θ)。
θ=arctan(V0/V1)−β。
L=c×δT/2=c×T×θ/(4π)。
【0017】
本実施形態によると、標本列の平均値を求めるという統計処理を用いて位相差を求めるので、ノイズなどの測定上の影響の少ない位相差の検出を行うことができる。また、信号波と受信波との位相差に基づいて距離を求めるので、高価な高速回路によらずに障害物までの距離を精度良く求めることができ、低コストの障害物検知装置を実現できる。なお、信号波の媒体として電波、光、超音波などを用いることができ、送信部3や受信部4などの障害物検知装置1の各部は、各媒体に応じた構成とされる。例えば、光を媒体とする場合、光強度を正弦波で振幅変調すればよい。送信波の波数、すなわち信号波の長さは、標本点の適切な平均処理に必要な測定点数が得られる長さであればよい。信号波が長すぎると、繰り返し距離測定の繰り返し時間間隔を短縮できなくなるので、測定条件に合わせて信号波の長さを設定する。
【0018】
(第2の実施形態)
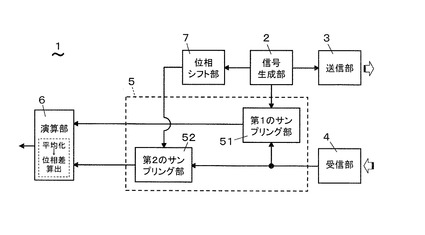
図3、図4は第2の実施形態とその変形例を示す。図3に示すように、本実施形態の障害物検知装置1は、上述の第1の実施形態における障害物検知装置1において、信号波の位相を90°ずらす位相シフト部7をさらに備え、サンプリング部5が、第1および第2のサンプリング部51,52を有するものである。第1のサンプリング部51は、信号波の周期毎に反射波を標本化して第1の標本列を取得し、第2のサンプリング部52は、位相シフト部7によって位相を90°ずらした信号波の周期毎に反射波を標本化して第2の標本列を取得する。また、演算部6は、第1および第2の標本列のそれぞれの平均値を求め、その平均値に基づいて信号波と反射波との位相差を求める。
【0019】
また、図4に示す変形例の障害物検知装置1は、位相シフト部7が反射波の位相を90°ずらし、第2のサンプリング部52が、信号波の周期毎に、位相を90°ずらした反射波を標本化して第2の標本列を取得するものであり、他は図3に示したもの同じである。本実施形態やその変形例によると、互いに位相が90°異なる2系列の標本列を確実に取得することができる。
【0020】
(第3の実施形態)
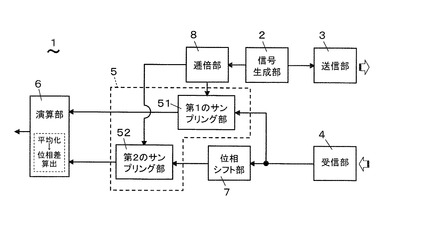
図5乃至図8は第3の実施形態とその変形例を示す。図5に示すように、本実施形態の障害物検知装置1は、上述の第1の実施形態における障害物検知装置1において、信号波の周波数を逓倍してなる逓倍波を生成する逓倍部8をさらに備え、サンプリング部5は逓倍波の周期毎に反射波を標本化して標本列を取得する。図6(a)(b)(c)は、4倍逓倍波に基づく標本化の例を示す。この例の場合、信号波の1/4周期毎に、すなわち、π/2の位相間隔の4系列の標本列が得られる。また、そのサンプリングのタイミングは、信号波の位相と同相またはπ/2の倍数だけずれた位相のタイミング(すなわち、上述のβ値が既知で、β=0,π/2,π、または3π/2)となっている。これらの4系列の標本列から4つの平均値が得られる。そこで、互いに位相が90°異なる任意の平均値を用いて位相差θを求めることができる。従って、各標本列における測定値変動の大小比較などによって、測定誤差が少ないと思われる平均値を選択して用いることにより、より精度良く位相差θを求めることができる。図7、図8に示す各変形例は、それぞれ、上述した第2の実施形態の図3、図4における障害物検知装置1において逓倍部8を備えたものである。
【0021】
(第4の実施形態)
図9、図10は第4の実施形態とその変形例を示す。図9に示すように、本実施形態の障害物検知装置1は、上述の第1の実施形態における障害物検知装置1において、サンプリング部5が、標本化に用いるADコンバータを備えるものである。また、図10に示すように、上述の第3の実施形態における障害物検知装置1において、サンプリング部5にADコンバータを備えたり、その他の実施形態においても、サンプリング部5にADコンバータを備えたりすることができる。このようなADコンバータを備えることにより、標本列をデジタル値として取得することができ、その後の演算部6においてデジタル処理が行えるので、演算部の処理の負荷が少なく、処理が簡便な装置が得られる。
【0022】
(第5の実施形態)
図11は第5の実施形態について示す。本実施形態の障害物検知装置1は、上述の第1の実施形態における障害物検知装置1において、信号生成部2が生成する信号波の周波数をシフトする周波数シフト部2aをさらに備えるものである。信号生成部2と周波数シフト部2aとは、全体で新たな信号生成部20を構成したものと見做すことができる。このような構成により、信号波の周波数が2種類以上の周波数間で切り替え自在である周波数可変の障害物検知装置1が得られる。一般に、送信波と反射波の位相差に基づいて障害物までの距離を求める装置においては、一意的に求めることができる最遠距離が信号波の波長によって制限される。つまり、位相が、1周期内で定義されることに起因して、波長より遠距離では、波長の整数倍の不確定さが伴うことになる。また、長い波長の信号波を用いると、複数周期にわたって十分な標本点数の標本列を得る必要性から、近距離における測定に時間がかかるなどの不具合が発生する。言い換えると、周波数を高くすればする程、距離分解能が高くなり、より正確な測距が可能となる。また、周波数を低くすればする程、1周期の時間が長くなり、より遠距離の対象物の検知が可能となる。本実施形態によれば、周波数シフト部2aを備えて信号波の周波数を切り替えることにより、対象物が遠距離または未検知の場合は周波数を低くしておき、対象物が検出され、近距離でより高い精度が必要な場合、周波数を高くするといった使用方法が可能となる。
【0023】
なお、本発明は、上記構成に限られることなく種々の変形が可能であり、上述した各実施形態の構成を互いに組み合わせた構成とすることができる。例えば、第5の実施形態における周波数シフト部2aを備える構成は、第2〜4の実施形態においても適用することができる。上記では、信号生成部2が正弦波状の信号波を生成する旨説明したが、信号波は、正弦波状の信号波に限らず、反射波との間で位相差θを定義できる信号波、例えば、三角波、のこぎり波その他の周期波であればよい。
【符号の説明】
【0024】
1 障害物検知装置
2 信号生成部
2a 周波数シフト部
3 送信部
4 受信部
5 サンプリング部
51 第1のサンプリング部
52 第2のサンプリング部
6 演算部
7 位相シフト部
8 逓倍部
T 周期
θ 位相差
【技術分野】
【0001】
本発明は、反射波を用いて障害物を検知する障害物検知装置に関する。
【背景技術】
【0002】
従来から、マイクロ波などの空間を伝播する信号波を用いて障害物を検知することが行われている。例えば、送信回路からの高周波信号をOn/Offしてパルス化するとともに装置外部に向けて送波し、その送波の障害物からの反射波を受信し、送信回路からの高周波信号と受信波とをミキシングするとともにAM検波する。得られた検波波形を微分回路で微分し、正の微分出力から反射波の立上りを検出して受波開始時刻を取得し、送信開始時刻との時間差に基づいて物体までの距離を算出して障害物を検知する障害物検知装置が知られている(例えば、特許文献1参照)。この装置において、時間差の取得のために、のこぎり刃状の波形の電圧−時間変換処理を用いたり、サンプリングパルスのパルス数をカウントしたりする処理が行われている。
【0003】
ここで、図12、図13を参照して、パルスカウンタを用いて時間差を取得し、障害物までの距離を求める従来技術の一般的な例を説明する。時間差取得に関連する回路部分は、図12に示すように、送信部91、受信部92、クロック発生部93、およびカウンタ94を備えたものとなる。受波開始時刻は、例えば、上述のように微分出力などによって検出されているものとする。カウンタ94は、送信部91からの送波開始時刻の情報と受信部92からの受波開始時刻の情報とに基づいて、これらの時刻の間にクロック発生部93が発生したクロックパルス数(nとする)をカウントする。求める時間差δTは、図13(a)(b)に示すように、送信信号と受信信号の立上りの時刻の時間差であり、クロックパルスは、図13(c)に示すように、時間差δTよりも十分短い周期Tcの高周波(周波数fc=1/Tc)のパルス列である。図13(d)に示すように、カウンタ94によって時間差δTの測定値として、時間t1=n/fc=n×Tcが得られる。時間t1は信号波の障害物までの往復時間であり、信号波(電波、光、超音波など)の伝播速度cを用いて、障害物までの距離Lは、L=c×t1/2によって求められる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2002−365362号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、距離Lを求めるために、上述した特許文献1や図12、図13に示されるような時間差δTの測定値である時間t1を用いる障害物検知装置においては、距離精度をより向上するためにクロックパルスの周波数fcをより高周波化する必要がある。上述の距離L=c×t1/2における信号波の伝播速度cは、信号波が電波や光の場合、c≒3×108mである。また、距離の誤差ΔLはΔL=c/fc/2となる。従って、例えばfc=150MHzの場合、ΔL=1mとなる。そして、距離の誤差ΔLを5cmまで向上するには、クロックパルスの周波数をfc=3GHzとする必要がある。電気回路は、一般に周波数が高いほど高価であり、実際の回路構成を高速化すると高価な回路構成となり、経済的ではないという問題がある。
【0006】
本発明は、上記課題を解消するものであって、光、電波、超音波等の信号波とその反射波とを用いて障害物までの距離を精度良く求めることができる低コストの障害物検知装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記課題を達成するために、本発明の障害物検知装置は、反射波を含む2波の位相差を求めることにより対象物までの距離を求める障害物検知装置において、正弦波状の信号波を生成する信号生成部と、信号生成部により生成された信号波を対象物に向けて送信する送信部と、送信部から送信された信号波の対象物からの反射波を受信する受信部と、受信部により受信された反射波の信号強度を標本化して標本列を取得するサンプリング部と、標本列における同位相標本点毎の平均値を求め、平均値のうち互いに位相が90°異なる2つの平均値に基づいて信号波と反射波の位相差を求める演算部と、を備えることを特徴とする。
【0008】
この障害物検知装置において、信号生成部により生成された信号波または受信部により受信された反射波の位相を90°ずらす位相シフト部を備え、サンプリング部は、第1および第2のサンプリング部を有し、第1のサンプリング部は、信号生成部により生成された信号波の周期毎に反射波の信号強度を標本化して第1の標本列を取得し、第2のサンプリング部は、位相シフト部によって信号波または反射波のいずれか一方の位相を90°ずらした上で信号波の周期毎に反射波の信号強度を標本化して第2の標本列を取得し、演算部は、第1および第2の標本列のそれぞれの平均値を求め、これらの平均値に基づいて信号波と反射波の位相差を求めることが好ましい。
【0009】
これらの障害物検知装置において、信号生成部により生成された信号波の周波数を逓倍してなる逓倍波を生成する逓倍部を備え、サンプリング部は、逓倍波の周期毎に反射波の信号強度を標本化して標本列を取得することが好ましい。
【0010】
これらの障害物検知装置において、サンプリング部は、標本化に用いるADコンバータを備えていることが好ましい。
【0011】
これらの障害物検知装置において、信号生成部は、生成する信号波の周波数を2種類以上の周波数間で切り替え自在であることが好ましい。
【発明の効果】
【0012】
本発明の障害物検知装置によれば、位相が異なる2系列の標本列の各平均値に基づいて信号波と受信波との位相差を求めるので、高価な高速回路によらずに位相差、従って障害物までの距離を精度良く求めることができ、低コストの障害物検知装置を実現できる。
【図面の簡単な説明】
【0013】
【図1】本発明の第1の実施形態に係る障害物検知装置のブロック構成図。
【図2】(a)(b)は同装置の動作を説明するためのタイミングチャート。
【図3】第2の実施形態に係る障害物検知装置のブロック構成図。
【図4】同装置の変形例を示すブロック構成図。
【図5】第3の実施形態に係る障害物検知装置のブロック構成図。
【図6】(a)(b)(c)は同装置の動作を説明するためのタイミングチャート。
【図7】同装置の変形例を示すブロック構成図。
【図8】同装置の他の変形例を示すブロック構成図。
【図9】第4の実施形態に係る障害物検知装置のブロック構成図。
【図10】同装置の変形例を示すブロック構成図。
【図11】第5の実施形態に係る障害物検知装置のブロック構成図。
【図12】従来の障害物検知装置における一般的な時間差検出部のブロック構成図。
【図13】(a)〜(d)は同装置の動作を説明するためのタイミングチャート。
【発明を実施するための形態】
【0014】
(第1の実施形態)
以下、本発明の実施形態に係る障害物検知装置について、図面を参照して説明する。図1、図2は第1の実施形態を示す。図1に示すように、本実施形態の障害物検知装置1は、正弦波状の信号波を生成する信号生成部2と、信号波を対象物に向けて送信する送信部3と、信号波の対象物からの反射波を受信する受信部4と、サンプリング部5と、演算部6と、を備える。サンプリング部5は、受信部4で受信された反射波の信号強度を標本化して標本列を取得する。演算部6は、標本列における同位相の標本点毎の信号強度の平均値を求め、平均値のうち互いに位相が90°異なる2つの平均値に基づいて信号波と反射波の位相差(θとする)を求める。障害物検知装置1は、反射波を含む2波、すなわち、送信波と反射波(受信波)の位相差θを測定し、その位相差θと信号波の既知の伝搬速度とから反射体である障害物までの距離を求めること、すなわち障害物を検知することができる。
【0015】
図2(a)(b)に示すように、送信信号(送信波)は適宜波数分の連続正弦波であり、受信信号(反射波)は送信部3から反射体を経由して受信部4に至る経路長に相当する時間差δTだけ遅延した信号である。送信波の周期を周期Tとすると、時間差δTを用いて、位相差θ=2π×δT/T(ラジアン)となり、逆に時間差δT=T×θ/(2π)となる。サンプリング部5は、互いに位相が90°(π/2ラジアン)異なる2系列の標本列を取得する。各標本列における標本点は、反射波中の同一位相状態における測定値(受信信号強度値)であり、周期T毎の測定値、または周期Tの整数倍毎の測定値である。図2(b)において、図中に白丸で示す測定点のうち、上側の測定点の系列と、下側測定点の系列が、互いに位相が90°異なる標本列である。演算部6は、各標本列における測定値の平均値(それぞれV0,V1とする)を求める。
【0016】
次に、平均値V0,V1から、位相差θを求め、障害物までの距離Lを求める方法を説明する。信号波の角周波数をω、初期位相をα、時間変数をtとし、位相差θを用いて、信号波S=A×sin(ωt+α)、反射波R=B×sin(ωt+α+θ)、とする。上述のV0,V1は、下式のように表される。ここでβは、サンプリング開始のタイミングに依存するパラメータであり、一般的に既知、または、設定によりβ=0とすることができる。演算部6は、下記のように、位相差θ、従って時間差δTを算出し、信号波の伝播速度cを用いて距離Lを算出する。
V0=B×sin(β+θ)、
V1=B×sin(β+θ−π/2)=B×cos(β+θ)。
V0/V1=tan(β+θ)。
θ=arctan(V0/V1)−β。
L=c×δT/2=c×T×θ/(4π)。
【0017】
本実施形態によると、標本列の平均値を求めるという統計処理を用いて位相差を求めるので、ノイズなどの測定上の影響の少ない位相差の検出を行うことができる。また、信号波と受信波との位相差に基づいて距離を求めるので、高価な高速回路によらずに障害物までの距離を精度良く求めることができ、低コストの障害物検知装置を実現できる。なお、信号波の媒体として電波、光、超音波などを用いることができ、送信部3や受信部4などの障害物検知装置1の各部は、各媒体に応じた構成とされる。例えば、光を媒体とする場合、光強度を正弦波で振幅変調すればよい。送信波の波数、すなわち信号波の長さは、標本点の適切な平均処理に必要な測定点数が得られる長さであればよい。信号波が長すぎると、繰り返し距離測定の繰り返し時間間隔を短縮できなくなるので、測定条件に合わせて信号波の長さを設定する。
【0018】
(第2の実施形態)
図3、図4は第2の実施形態とその変形例を示す。図3に示すように、本実施形態の障害物検知装置1は、上述の第1の実施形態における障害物検知装置1において、信号波の位相を90°ずらす位相シフト部7をさらに備え、サンプリング部5が、第1および第2のサンプリング部51,52を有するものである。第1のサンプリング部51は、信号波の周期毎に反射波を標本化して第1の標本列を取得し、第2のサンプリング部52は、位相シフト部7によって位相を90°ずらした信号波の周期毎に反射波を標本化して第2の標本列を取得する。また、演算部6は、第1および第2の標本列のそれぞれの平均値を求め、その平均値に基づいて信号波と反射波との位相差を求める。
【0019】
また、図4に示す変形例の障害物検知装置1は、位相シフト部7が反射波の位相を90°ずらし、第2のサンプリング部52が、信号波の周期毎に、位相を90°ずらした反射波を標本化して第2の標本列を取得するものであり、他は図3に示したもの同じである。本実施形態やその変形例によると、互いに位相が90°異なる2系列の標本列を確実に取得することができる。
【0020】
(第3の実施形態)
図5乃至図8は第3の実施形態とその変形例を示す。図5に示すように、本実施形態の障害物検知装置1は、上述の第1の実施形態における障害物検知装置1において、信号波の周波数を逓倍してなる逓倍波を生成する逓倍部8をさらに備え、サンプリング部5は逓倍波の周期毎に反射波を標本化して標本列を取得する。図6(a)(b)(c)は、4倍逓倍波に基づく標本化の例を示す。この例の場合、信号波の1/4周期毎に、すなわち、π/2の位相間隔の4系列の標本列が得られる。また、そのサンプリングのタイミングは、信号波の位相と同相またはπ/2の倍数だけずれた位相のタイミング(すなわち、上述のβ値が既知で、β=0,π/2,π、または3π/2)となっている。これらの4系列の標本列から4つの平均値が得られる。そこで、互いに位相が90°異なる任意の平均値を用いて位相差θを求めることができる。従って、各標本列における測定値変動の大小比較などによって、測定誤差が少ないと思われる平均値を選択して用いることにより、より精度良く位相差θを求めることができる。図7、図8に示す各変形例は、それぞれ、上述した第2の実施形態の図3、図4における障害物検知装置1において逓倍部8を備えたものである。
【0021】
(第4の実施形態)
図9、図10は第4の実施形態とその変形例を示す。図9に示すように、本実施形態の障害物検知装置1は、上述の第1の実施形態における障害物検知装置1において、サンプリング部5が、標本化に用いるADコンバータを備えるものである。また、図10に示すように、上述の第3の実施形態における障害物検知装置1において、サンプリング部5にADコンバータを備えたり、その他の実施形態においても、サンプリング部5にADコンバータを備えたりすることができる。このようなADコンバータを備えることにより、標本列をデジタル値として取得することができ、その後の演算部6においてデジタル処理が行えるので、演算部の処理の負荷が少なく、処理が簡便な装置が得られる。
【0022】
(第5の実施形態)
図11は第5の実施形態について示す。本実施形態の障害物検知装置1は、上述の第1の実施形態における障害物検知装置1において、信号生成部2が生成する信号波の周波数をシフトする周波数シフト部2aをさらに備えるものである。信号生成部2と周波数シフト部2aとは、全体で新たな信号生成部20を構成したものと見做すことができる。このような構成により、信号波の周波数が2種類以上の周波数間で切り替え自在である周波数可変の障害物検知装置1が得られる。一般に、送信波と反射波の位相差に基づいて障害物までの距離を求める装置においては、一意的に求めることができる最遠距離が信号波の波長によって制限される。つまり、位相が、1周期内で定義されることに起因して、波長より遠距離では、波長の整数倍の不確定さが伴うことになる。また、長い波長の信号波を用いると、複数周期にわたって十分な標本点数の標本列を得る必要性から、近距離における測定に時間がかかるなどの不具合が発生する。言い換えると、周波数を高くすればする程、距離分解能が高くなり、より正確な測距が可能となる。また、周波数を低くすればする程、1周期の時間が長くなり、より遠距離の対象物の検知が可能となる。本実施形態によれば、周波数シフト部2aを備えて信号波の周波数を切り替えることにより、対象物が遠距離または未検知の場合は周波数を低くしておき、対象物が検出され、近距離でより高い精度が必要な場合、周波数を高くするといった使用方法が可能となる。
【0023】
なお、本発明は、上記構成に限られることなく種々の変形が可能であり、上述した各実施形態の構成を互いに組み合わせた構成とすることができる。例えば、第5の実施形態における周波数シフト部2aを備える構成は、第2〜4の実施形態においても適用することができる。上記では、信号生成部2が正弦波状の信号波を生成する旨説明したが、信号波は、正弦波状の信号波に限らず、反射波との間で位相差θを定義できる信号波、例えば、三角波、のこぎり波その他の周期波であればよい。
【符号の説明】
【0024】
1 障害物検知装置
2 信号生成部
2a 周波数シフト部
3 送信部
4 受信部
5 サンプリング部
51 第1のサンプリング部
52 第2のサンプリング部
6 演算部
7 位相シフト部
8 逓倍部
T 周期
θ 位相差
【特許請求の範囲】
【請求項1】
反射波を含む2波の位相差を求めることにより対象物までの距離を求める障害物検知装置において、
正弦波状の信号波を生成する信号生成部と、
前記信号生成部により生成された信号波を対象物に向けて送信する送信部と、
前記送信部から送信された信号波の対象物からの反射波を受信する受信部と、
前記受信部により受信された反射波の信号強度を標本化して標本列を取得するサンプリング部と、
前記前記サンプリング部により取得された標本列における同位相標本点毎の平均値を求め、前記平均値のうち互いに位相が90°異なる2つの平均値に基づいて前記信号波と前記反射波の位相差を求める演算部と、を備えることを特徴とする障害物検知装置。
【請求項2】
前記信号生成部により生成された信号波または前記受信部により受信された反射波の位相を90°ずらす位相シフト部を備え、
前記サンプリング部は、第1および第2のサンプリング部を有し、
前記第1のサンプリング部は、前記信号生成部により生成された信号波の周期毎に前記反射波の信号強度を標本化して第1の標本列を取得し、
前記第2のサンプリング部は、前記位相シフト部によって前記信号波または前記反射波のいずれか一方の位相を90°ずらした上で信号波の周期毎に反射波の信号強度を標本化して第2の標本列を取得し、
前記演算部は、前記第1および第2の標本列のそれぞれの平均値を求め、これらの平均値に基づいて前記信号波と前記反射波の位相差を求めることを特徴とする請求項1に記載の障害物検知装置。
【請求項3】
前記信号生成部により生成された信号波の周波数を逓倍してなる逓倍波を生成する逓倍部を備え、
前記サンプリング部は、前記逓倍波の周期毎に前記反射波の信号強度を標本化して前記標本列を取得することを特徴とする請求項1または請求項2に記載の障害物検知装置。
【請求項4】
前記サンプリング部は、前記標本化に用いるADコンバータを備えていることを特徴とする請求項1乃至請求項3のいずれか一項に記載の障害物検知装置。
【請求項5】
前記信号生成部は、生成する信号波の周波数を2種類以上の周波数間で切り替え自在であることを特徴とする請求項1乃至請求項4のいずれか一項に記載の障害物検知装置。
【請求項1】
反射波を含む2波の位相差を求めることにより対象物までの距離を求める障害物検知装置において、
正弦波状の信号波を生成する信号生成部と、
前記信号生成部により生成された信号波を対象物に向けて送信する送信部と、
前記送信部から送信された信号波の対象物からの反射波を受信する受信部と、
前記受信部により受信された反射波の信号強度を標本化して標本列を取得するサンプリング部と、
前記前記サンプリング部により取得された標本列における同位相標本点毎の平均値を求め、前記平均値のうち互いに位相が90°異なる2つの平均値に基づいて前記信号波と前記反射波の位相差を求める演算部と、を備えることを特徴とする障害物検知装置。
【請求項2】
前記信号生成部により生成された信号波または前記受信部により受信された反射波の位相を90°ずらす位相シフト部を備え、
前記サンプリング部は、第1および第2のサンプリング部を有し、
前記第1のサンプリング部は、前記信号生成部により生成された信号波の周期毎に前記反射波の信号強度を標本化して第1の標本列を取得し、
前記第2のサンプリング部は、前記位相シフト部によって前記信号波または前記反射波のいずれか一方の位相を90°ずらした上で信号波の周期毎に反射波の信号強度を標本化して第2の標本列を取得し、
前記演算部は、前記第1および第2の標本列のそれぞれの平均値を求め、これらの平均値に基づいて前記信号波と前記反射波の位相差を求めることを特徴とする請求項1に記載の障害物検知装置。
【請求項3】
前記信号生成部により生成された信号波の周波数を逓倍してなる逓倍波を生成する逓倍部を備え、
前記サンプリング部は、前記逓倍波の周期毎に前記反射波の信号強度を標本化して前記標本列を取得することを特徴とする請求項1または請求項2に記載の障害物検知装置。
【請求項4】
前記サンプリング部は、前記標本化に用いるADコンバータを備えていることを特徴とする請求項1乃至請求項3のいずれか一項に記載の障害物検知装置。
【請求項5】
前記信号生成部は、生成する信号波の周波数を2種類以上の周波数間で切り替え自在であることを特徴とする請求項1乃至請求項4のいずれか一項に記載の障害物検知装置。
【図1】



【図2】

【図3】
【図4】

【図5】

【図6】
【図7】

【図8】
【図9】

【図10】
【図11】

【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2012−93142(P2012−93142A)
【公開日】平成24年5月17日(2012.5.17)
【国際特許分類】
【出願番号】特願2010−239104(P2010−239104)
【出願日】平成22年10月25日(2010.10.25)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
【公開日】平成24年5月17日(2012.5.17)
【国際特許分類】
【出願日】平成22年10月25日(2010.10.25)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
[ Back to top ]