
障害物認識装置及び障害物認識方法
【課題】高い精度で障害物を認識することができる障害物認識装置を提供する。
【解決手段】本発明の一実施形態に係る障害物認識装置1は、電磁波を発信し、その反射波の反射出力に基づいて障害物を検出する第1の障害物検出手段11と、第1の障害物検出手段とは異なる方法で障害物を検出する第2の障害物検出手段12と、第2の障害物検出手段により検出された複数の障害物についてそれらの障害物の推定反射出力を合成した合成推定反射出力を算出する反射出力推定手段22と、合成推定反射出力と第1の障害物検出手段により計測された計測反射出力との比較結果を用いて障害物を認識する障害物統合認識手段24と、を備える。
【解決手段】本発明の一実施形態に係る障害物認識装置1は、電磁波を発信し、その反射波の反射出力に基づいて障害物を検出する第1の障害物検出手段11と、第1の障害物検出手段とは異なる方法で障害物を検出する第2の障害物検出手段12と、第2の障害物検出手段により検出された複数の障害物についてそれらの障害物の推定反射出力を合成した合成推定反射出力を算出する反射出力推定手段22と、合成推定反射出力と第1の障害物検出手段により計測された計測反射出力との比較結果を用いて障害物を認識する障害物統合認識手段24と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、複数のセンサの計測結果を用いて障害物認識を行う障害物認識装置に関する。
【背景技術】
【0002】
従来、検出原理の異なる複数のセンサの計測結果を統合して障害物の認識を行うセンサフュージョンという手法が知られている。例えば、特許文献1では、測距センサの測距結果と画像センサの撮影画像とに基づきセンサフュージョンで先行車を認識する先行車認識装置及び方法が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−90974号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ここで、上述したような先行車認識装置では、測距センサとして電波レーダが用いられることが一般的であるが、電波レーダは水平方向の分解能が低いことから複数の障害物を分離することができずに単一の障害物として誤認識する場合がある。その場合、電波レーダとその他のセンサの検出結果において整合性がとれなくなり、適切な障害物認識ができなくなるという問題があった。
【0005】
そこで、本発明は、複数のセンサによる障害物検出結果の整合をとることにより、高い精度で障害物を認識することができる障害物認識装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するため、本発明に係る障害物認識装置は、電磁波を発信し、その反射波の反射出力に基づいて障害物を検出する第1の障害物検出手段と、第1の障害物検出手段とは異なる方法で障害物を検出する第2の障害物検出手段と、第2の障害物検出手段により検出された複数の障害物についてそれらの障害物の推定反射出力を合成した合成推定反射出力を算出する反射出力推定手段と、合成推定反射出力と第1の障害物検出手段により計測された計測反射出力との比較結果を用いて障害物を認識する障害物統合認識手段と、を備える。
【0007】
このように、第2の障害物検出手段による障害物検出結果に基づいて合成推定反射出力を算出し、合成推定反射出力と計測反射出力との比較結果を用いて障害物を認識することにより、第1の障害物検出手段では分離して検出できない障害物が存在する場合にも、第1の障害物検出手段の障害物検出結果と第2の障害物検出手段の障害物検出結果が不整合となることが抑制され、適切な障害物認識を行うことが可能になる。これにより、高い精度で障害物を認識することができる。
【0008】
また、第1の障害物検出手段では分離して検出できないと予測される複数の障害物をグループ化する障害物グルーピング処理手段を更に備えることが好適である。
【0009】
このような障害物グルーピング処理手段を備えることにより、分離して検出することが可能な障害物を推定反射出力の検出対象から除外することができるため、障害物認識における処理負荷を低減することが可能になる。
【0010】
また、障害物統合認識手段は、合成推定反射出力と計測反射出力との差分が所定値以下である場合、第1の障害物検出手段では分離して検出できない複数の障害物を第2の障害物検出手段による検出結果に基づいて分離して認識することが好適である。
【0011】
障害物認識装置において障害物認識を行うにあたり、合成推定反射出力と測定反射出力との差分が所定値以下である場合には、第2の障害物検出手段による障害物検出結果は適切であると考えられるため、第2の障害物検出手段による検出結果に基づいて障害物を分離して認識する。これにより、隣り合う複数の障害物を第1の障害物検出手段が分離できずに単一の障害物として検出してしまう場合でも、第2の障害物検出手段によって障害物を適切に認識することができる。その上、推定反射出力と測定反射出力とのマッチングを行っているため、第2の障害物検出手段のみによる障害物検出と比較して高い精度で障害物を認識することができる。このように、本発明に係る障害物認識装置によれば、第1の障害物検出手段と第2の障害物検出手段の障害物検出結果の不整合を抑制し、高い精度で障害物を認識することができる。
【0012】
また、推定反射出力算出手段は、障害物からの反射波の反射出力モデルを有し、第2の障害物検出手段によって検出された障害物の幅と反射出力モデルに基づいて、推定反射出力を予測することが好適である。
【0013】
障害物の幅が広い場合には、障害物からの反射波の反射出力が大きくなり、障害物の幅が狭い場合には、障害物からの反射波の反射出力が小さくなる。そのため、障害物の幅と、障害物に対応した反射出力モデルを用いることで適切に推定反射出力を予測することができる。
【0014】
さらに、推定反射出力算出手段は、障害物からの反射波の反射出力モデルを有し、第2の障害物検出手段によって検出された障害物の種類、幅、及び反射出力モデルに基づいて、推定反射出力を予測することが好適である。
【0015】
発信した電磁波に対する反射波の反射出力は、人と車など、障害物の種類によって異なる。そのため、障害物の幅、反射出力モデルに加えて、障害物の種類を用いることで適切に推定反射出力を予測することができる。
【0016】
また、反射出力モデルは正規分布関数であることが好適である。
【0017】
障害物に対する反射波の反射出力は障害物の幅に基づいた正規分布となることが知られている。そのため、反射出力モデルとして正規分布関数を用いることで適切に推定反射出力の算出を行うことができる。
【0018】
また、本発明に係る障害物認識装置は、車両に搭載され、前記車両の周囲の障害物を認識することが好適である。
【0019】
本発明に係る障害物認識装置を車両に搭載し、車両周囲の障害物を高精度に認識することにより、自車両と周囲に存在する障害物との衝突を適切に回避することができ、安全性を高めることができる。
【0020】
また、本発明に係る障害物認識方法は、電磁波を発信し、その反射波の反射出力に基づいて障害物を検出する第1の障害物検出工程と、第1の障害物検出工程とは異なる方法で障害物を検出する第2の障害物検出工程と、第2の障害物検出工程において検出された複数の障害物についてそれらの障害物の推定反射出力を合成した合成推定反射出力を算出する反射出力推定工程と、合成推定反射出力と第1の障害物検出工程において計測された計測反射出力との比較結果を用いて障害物を認識する障害物統合認識工程と、を含む。
【0021】
このように、本発明に係る障害物認識方法においては、第2の障害物検出工程における障害物検出結果に基づいて合成推定反射出力を算出し、合成推定反射出力と計測反射出力との比較結果を用いて障害物を認識することにより、第1の障害物検出工程において分離できない障害物が存在する場合にも、第1の障害物検出工程における障害物検出結果と第2の障害物検出工程における障害物検出結果が不整合となることが抑制され、適切な障害物検出を行うことが可能になる。これにより、高い精度で障害物を認識することができる。
【発明の効果】
【0022】
本発明によれば、複数のセンサによる障害物検出結果の整合をとることにより、高い精度で障害物を認識することができる障害物認識装置を提供することができる。
【図面の簡単な説明】
【0023】
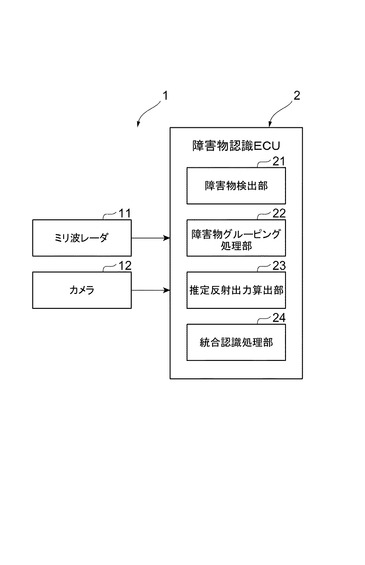
【図1】本発明の実施形態に係る障害物認識装置のブロック構成図である。
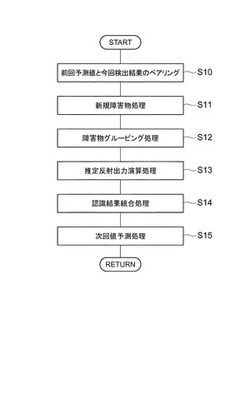
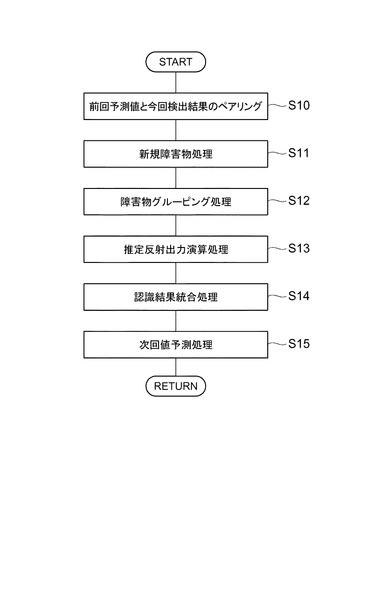
【図2】本発明の実施形態に係る障害物認識装置の動作についてのフローチャートである。
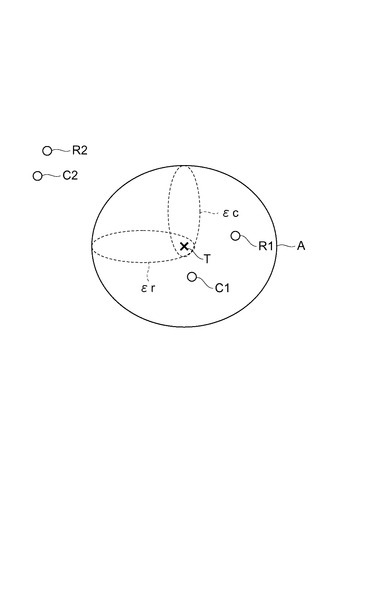
【図3】前回予測値と今回検出結果のペアリング処理を示す図である。
【図4】ミリ波レーダが分離できないと予測される分離不可領域を算出する例を示す図である。
【図5】複数の障害物をグループ化する例を示す図である。
【図6】図6(a)は障害物が車である場合の推定反射出力の例を示す図であり、図6(b)は障害物が人である場合の推定反射出力の例を示す図である。
【図7】障害物の幅と、推定反射出力のピーク値との関係を示すグラフである。
【図8】グループ化された障害物の合成推定反射出力を示す図である。
【発明を実施するための形態】
【0024】
以下、添付図面を参照して、本発明の好適な実施形態について詳細に説明する。なお、以下の説明において、同一又は相当要素には同一符号を付し、重複する説明を省略する。
【0025】
図1は本発明の実施形態に係る障害物認識装置の構成概要図である。
【0026】
本実施形態に係る障害物認識装置1は、車両に搭載され、複数のセンサの計測結果を用いて車両の周囲に存在する障害物の認識を行う装置である。この駐車支援装置1は、ミリ波レーダ11(第1の障害物検出手段)、カメラ12(第2の障害物検出手段)、障害物認識ECU(Electronic Control Unit)2を備えている。
【0027】
障害物認識ECU2には、ミリ波レーダ11及びカメラ12が接続されている。ミリ波レーダ11は、車両前方に電波を照射し、物体の表面で反射された電波を受信し、受信信号の周波数変化から物体の有無、車両から見た物体の方位、車両から物体までの距離、物体の大きさ及び車両に対する物体の相対速度等の情報を取得する。また、ミリ波レーダ11は、検出した物体に関する各種情報を障害物認識ECU2に送出する。
【0028】
カメラ12は、車両前方を撮像し、車両前方の撮像画像を取得する。また、カメラ12は取得した車両前方の撮像画像を障害物認識ECU2に送出する。
【0029】
障害物認識ECU2は、例えばCPU、ROM、及びRAM等から構成され、障害物検知部21、障害物グルーピング処理部22(障害物グルーピング処理手段)、推定反射出力算出部23(反射出力推定手段)及び統合認識処理部24(障害物統合認識手段)を有している。障害物検出部21は、ミリ波レーダ11から出力されるレーダ情報に基づき、自車両周辺の障害物を含む領域を検出する。また、カメラ12から出力される画像情報に基づき障害物を含む領域を検出するとともに障害物の種類を認識する。カメラ12により検出された障害物情報は障害物グルーピング処理部22に出力される。
【0030】
障害物グルーピング処理部22は、画像情報に基づく障害物検出結果から、レーダ情報に基づく障害物検出では複数の障害物を分離することができずに単一の障害物として検出する可能性のある障害物を検出し、グループ化する。グループ化した障害物情報は推定反射出力算出部23に出力する。
【0031】
推定反射出力算出部23は、グループ化された障害物の種類、幅等の情報から推定反射出力を予測する。また、障害物毎に予測された推定反射出力を合成した合成推定反射出力を算出し、その結果を統合認識処理部24に出力する。
【0032】
統合認識処理部24は、ミリ波レーダ11に基づく障害物検出結果とカメラ12に基づく障害物検出結果の両方を用いて自車両の周囲に存在する障害物を認識する。また、合成推定反射出力とミリ波レーダ11によって計測された反射出力を比較し、その差分が所定値以下である場合はカメラ12による障害物検出結果を用いて障害物を分離して認識する。ここで、所定値とは予めECU2に設定される設定値である。この値はミリ波レーダ11とカメラ12の検出特性に依存して決定される。
【0033】
この障害物認識装置1は、好適には、車両衝突回避のための車両運転支援システムの一部として用いられる。この車両運転支援システムでは、障害物認識装置1により検出された障害物検出情報に基づいて、車両の運転者への警告処理、衝突回避のための制動準備処理及び衝突回避のため制動制御の一部又は全部を実行する。これらの処理の実行により、障害物との衝突回避又は障害物との衝突影響の軽減を図ることができる。
【0034】
次に本実施形態に係る障害物認識装置1の動作について説明する。
【0035】
図2は本発明の実施形態に係る障害物認識装置の動作についてのフローチャートである。図2における制御処理は、例えば障害物認識ECU2により予め設定された所定周期で繰り返し実行される。
【0036】
まず、図2に示すように、前回予測値と今回検出結果のペアリングが行われる(S10)。前回予測値と今回検出結果のペアリングは前回発見された障害物と障害物検出部21により今回検出された障害物との対応付けを行う処理である。図3を用いて前回予測値と今回検出結果のペアリング方法について説明する。図3における前回予測値Tは、前回の処理で発見された障害物と自車両との相対速度、位置情報等から予測される現時点における障害物の予測位置である。今回検出結果Rn及びCn(nは正の整数)は、それぞれミリ波レーダ11及びカメラ12の計測結果を読み込むことで検出される障害物の検出位置である。前回予測値Tに対して、ミリ波レーダ11による今回検出結果R1とカメラ12による今回検出結果C1が許容誤差範囲Aの内側に入っている場合には、前回の処理で発見された障害物と今回検出結果R1及びC1は同一の障害物であると判定される。
【0037】
また、ミリ波レーダ11による今回検出結果R1及びカメラ12による今回検出結果C1のどちらか一方が許容誤差範囲Aの内部に検出されない場合には、複数のセンサ間で検出結果の整合性がとれないことから、検出結果の信頼性が低いと判断され障害物認識は行われない。
【0038】
許容誤差範囲Aの設定方法は様々な方法が知られているが、本実施形態では、カメラによる障害物検知において予測される前後方向の誤差を長径、左右方向の誤差を短径とする楕円εcとミリ波レーダ11による障害物検知において予測される前後方向の誤差を短径、左右方向の誤差を長径とする楕円εrを設定し、楕円εcと楕円εrの長径を径とする楕円を許容誤差範囲Aとしている。
【0039】
次にS10によって取得された前回予測値と今回検出結果から新規障害物処理が行われる(S11)。図3に示す今回検出結果R2、C2のように、前回予測値がペアリングできない場合には、今回検出結果R2、C2は新規障害物候補として設定され、記憶される。
【0040】
続いて、障害物グルーピング処理部22により障害物グルーピング処理が行われる(S12)。障害物グルーピング処理では、ペアリングされた障害物及び新規障害物候補の中から、ミリ波レーダが複数の障害物を分離することができずに単一の障害物として誤認識する可能性のある障害物の候補がグループ化される。障害物グルーピング処理は、カメラ12によって得られた障害物検出結果を用いて行われる。
【0041】
図4は、ミリ波レーダが分離できないと予測される分離不可領域Fを算出する例である。図4に示すように、カメラ12から検出された障害物の幅Wと、カメラ12の幅方向の検出誤差σwの左右分と、ミリ波分離不可能距離dの左右分を加算したものが分離不可領域Fの幅として設定される。また、カメラ12により検出された障害物の高さHに、カメラ12の高さ方向の検出誤差σhの上下分を加算したものが分離不可領域Fの高さとして設定される。ここで、カメラ12の幅方向の検出誤差σw、σh及びミリ波分離不可能距離dは、それぞれ使用するカメラ、ミリ波レーダの検出特性に依存して決定される値とすればよい。
【0042】
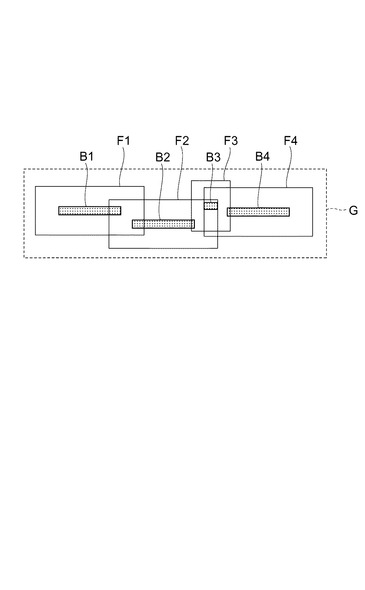
次に、ペアリングできた障害物と新規障害物候補において自車両からの距離が同一範囲の複数の障害物において、分離不可領域Fが設定される。ここで、同一範囲とは、自車両から障害物までの距離が完全同一なもののみでなく、ミリ波レーダ11が距離方向で分離できない、略同一の距離も含むものである。そして、分離不可領域Fと他の障害物において重複する領域がある場合にはグループ化が行われる。図5は、複数の障害物を障害物グルーピング処理する例を示している。障害物グループGに属する障害物B1の分離不可領域F1は、他の障害物B2の一部と重複しているため、障害物B2は障害物グループGに追加される。さらに、障害物グループGに属する障害物B2の分離不可領域F2は、他の障害物B3の一部と重複しているため障害物B3は障害物グループGに追加される。障害物グループGに属する障害物B3の分離不可領域F3は、他の障害物B4の一部と重複しているため障害物B4は障害物グループGに追加される。
【0043】
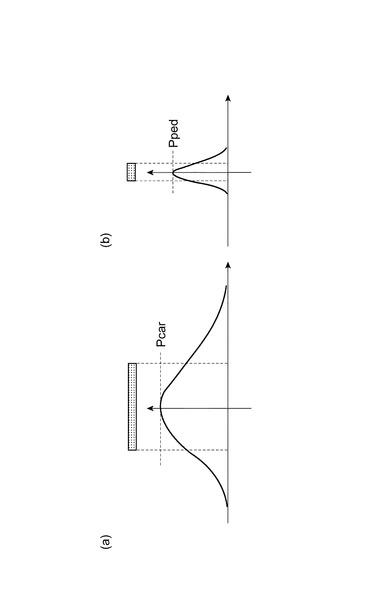
続いて、S12でグループ化された障害物グループGに対して推定反射出力演算処理が行われる(S13)。推定反射出力演算処理では、グループ化された個々の障害物の推定反射出力が算出されるとともに、グループ化されたすべての障害物の推定反射出力を加算し、合成した合成推定反射出力が算出される。図6は個々の障害物の推定反射出力を算出する例を示している。推定反射出力は、カメラ12で検出した障害物の幅を標準偏差とする正規分布関数として算出される。また、推定反射出力のピーク値は障害物の種類(例えば車や人等)に基づいて設定される。図6(a)は障害物が車である場合の推定反射出力の例であり、図6(b)は障害物が人である場合の推定反射出力の例である。図6(a)、(b)に示すように、障害物が車である場合の推定反射出力のピーク値Pcarは、障害物が人である場合の推定反射出力のピーク値Ppedと比較して大きく設定される。また、障害物が車の場合でも、車の幅に基づいてピーク値Pcarを可変させることが好ましい。障害物の種類や幅と推定反射出力のピーク値の関係を示すテーブルは、障害物認識ECU2のROMに予め格納されており、障害物認識ECU2は、必要に応じてROMからテーブルを読み出して推定反射出力を算出する。
【0044】
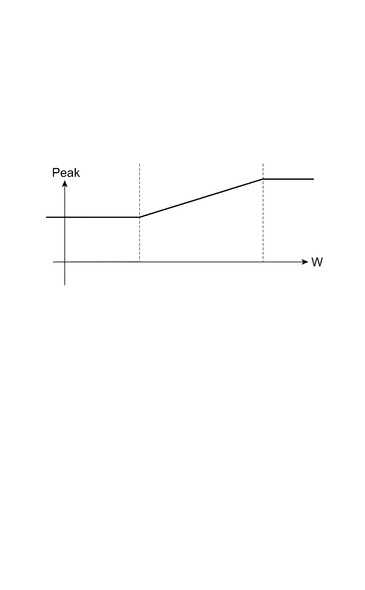
また、センサとしてレーザレーダ等のカメラ以外のセンサを用いる場合であって、障害物の種類を認識することができない場合には、障害物の幅により推定反射出力のピーク値を設定してもよい。図7は障害物の幅と、対応する推定反射出力のピーク値との関係を示すグラフである。
【0045】
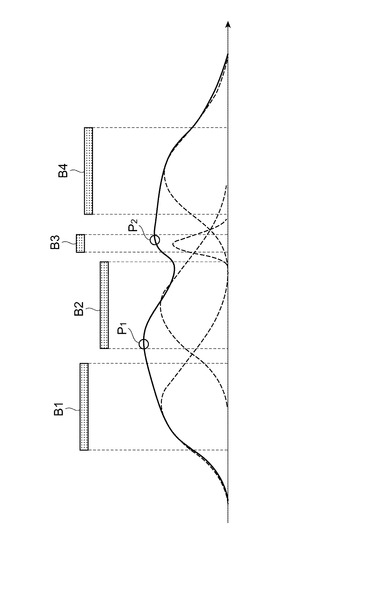
グルーピングされた障害物グループGの個々の障害物の推定反射出力が算出された後に、図8に示すように障害物グループGのすべての障害物の推定反射出力が加算され、その結果が合成推定反射出力となる。また、算出された推定反射出力から、微分値が0になる地点、すなわちピーク値がミリ波推定出力候補として設定される。図8の例では、P1及びP2がミリ波推定出力候補となる。
【0046】
S13で合成推定反射出力が算出されると、次に認識結果統合処理に移行する(S14)。認識結果統合処理では、まず、算出した合成推定反射出力とミリ波レーダ11で計測された反射出力が比較される。具体的には、計測された反射出力における複数個のピーク値とミリ波推定出力候補が比較され、その差分が所定値以下である場合には推定反射出力と計測反射出力とのマッチングがされたと判断される。ここで、所定値とはミリ波レーダ11とカメラ12の検出特性に依存して決定される値である。
【0047】
推定反射出力と計測反射出力がマッチングされた場合には、障害物グルーピング処理でグループ化された障害物群について、カメラ12による障害物検出結果を用いて障害物を分離して障害物が認識される。その上で、検出した障害物と前回予測値Tとのペアリングが行われることにより、障害物のトラッキング及び新規障害物検出が行われる。
【0048】
次に、次回値予測処理に処理が移行する(S15)。次回値予測処理では、S14において認識された障害物情報から、カルマンフィルタ等を利用して次回の障害物認識処理における障害物の予測位置が推定される。このような所定時間後の障害物の予測位置の推定方法は公知の方法が提案されているため、本明細書では詳細は省略する。推定された障害物の予測位置は、所定期間後の障害物認識処理におけるペアリングで利用される。
【0049】
以上のように、本実施形態に係る障害物認識装置1によれば、カメラ12による障害物検出結果に基づいて合成推定反射出力を算出し、ミリ波レーダ11による計測反射出力と比較することにより、ミリ波レーダ11では分離して検出できない障害物が存在する場合には、カメラ12の障害物検出結果を用いて障害物を分離して認識する。そのため、カメラ12の障害物検出結果とミリ波レーダ11の障害物検出結果が不整合となることが抑制され、適切な障害物検出を行うことが可能になる。これにより、高い精度で障害物を認識することができる。
【0050】
なお、本発明の好適な実施形態について説明したが、本発明は上記実施形態に限定されるものではない。例えば、本実施形態では、ミリ波レーダ11とカメラ12を用いて障害物認識を行っているが、カメラ12の代わりにレーザレーダ等の横方向の分解能が優れたセンサを用いて障害物検出を行うことも可能である。
【0051】
また、本実施形態では、障害物グルーピング処理において、分離不可領域Fと他の障害物において重複する領域がある場合にグルーピングを行っているが、分離不可領域Fと他の障害物の分離不可領域Fが重複する際に障害物をグループ化してもよい。
【0052】
さらに、本実施形態では、合成推定反射出力と計測反射出力とのマッチングを、計測された反射出力における複数個のピーク値とミリ波推定出力候補との差分により行っているが、異なる方法を用いてもよい。例えば、所定範囲において合成推定反射出力と計測反射出力の積分値を求め、それらの差分が所定値以下になるか否によりマッチングの判断をすることもできる。
【符号の説明】
【0053】
1…障害物認識装置、2…障害物認識ECU、11…ミリ波レーダ、12…カメラ、21…障害物検出部、22…障害物グルーピング処理部、23…推定反射出力算出部、24…統合認識処理部。
【技術分野】
【0001】
本発明は、複数のセンサの計測結果を用いて障害物認識を行う障害物認識装置に関する。
【背景技術】
【0002】
従来、検出原理の異なる複数のセンサの計測結果を統合して障害物の認識を行うセンサフュージョンという手法が知られている。例えば、特許文献1では、測距センサの測距結果と画像センサの撮影画像とに基づきセンサフュージョンで先行車を認識する先行車認識装置及び方法が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−90974号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ここで、上述したような先行車認識装置では、測距センサとして電波レーダが用いられることが一般的であるが、電波レーダは水平方向の分解能が低いことから複数の障害物を分離することができずに単一の障害物として誤認識する場合がある。その場合、電波レーダとその他のセンサの検出結果において整合性がとれなくなり、適切な障害物認識ができなくなるという問題があった。
【0005】
そこで、本発明は、複数のセンサによる障害物検出結果の整合をとることにより、高い精度で障害物を認識することができる障害物認識装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するため、本発明に係る障害物認識装置は、電磁波を発信し、その反射波の反射出力に基づいて障害物を検出する第1の障害物検出手段と、第1の障害物検出手段とは異なる方法で障害物を検出する第2の障害物検出手段と、第2の障害物検出手段により検出された複数の障害物についてそれらの障害物の推定反射出力を合成した合成推定反射出力を算出する反射出力推定手段と、合成推定反射出力と第1の障害物検出手段により計測された計測反射出力との比較結果を用いて障害物を認識する障害物統合認識手段と、を備える。
【0007】
このように、第2の障害物検出手段による障害物検出結果に基づいて合成推定反射出力を算出し、合成推定反射出力と計測反射出力との比較結果を用いて障害物を認識することにより、第1の障害物検出手段では分離して検出できない障害物が存在する場合にも、第1の障害物検出手段の障害物検出結果と第2の障害物検出手段の障害物検出結果が不整合となることが抑制され、適切な障害物認識を行うことが可能になる。これにより、高い精度で障害物を認識することができる。
【0008】
また、第1の障害物検出手段では分離して検出できないと予測される複数の障害物をグループ化する障害物グルーピング処理手段を更に備えることが好適である。
【0009】
このような障害物グルーピング処理手段を備えることにより、分離して検出することが可能な障害物を推定反射出力の検出対象から除外することができるため、障害物認識における処理負荷を低減することが可能になる。
【0010】
また、障害物統合認識手段は、合成推定反射出力と計測反射出力との差分が所定値以下である場合、第1の障害物検出手段では分離して検出できない複数の障害物を第2の障害物検出手段による検出結果に基づいて分離して認識することが好適である。
【0011】
障害物認識装置において障害物認識を行うにあたり、合成推定反射出力と測定反射出力との差分が所定値以下である場合には、第2の障害物検出手段による障害物検出結果は適切であると考えられるため、第2の障害物検出手段による検出結果に基づいて障害物を分離して認識する。これにより、隣り合う複数の障害物を第1の障害物検出手段が分離できずに単一の障害物として検出してしまう場合でも、第2の障害物検出手段によって障害物を適切に認識することができる。その上、推定反射出力と測定反射出力とのマッチングを行っているため、第2の障害物検出手段のみによる障害物検出と比較して高い精度で障害物を認識することができる。このように、本発明に係る障害物認識装置によれば、第1の障害物検出手段と第2の障害物検出手段の障害物検出結果の不整合を抑制し、高い精度で障害物を認識することができる。
【0012】
また、推定反射出力算出手段は、障害物からの反射波の反射出力モデルを有し、第2の障害物検出手段によって検出された障害物の幅と反射出力モデルに基づいて、推定反射出力を予測することが好適である。
【0013】
障害物の幅が広い場合には、障害物からの反射波の反射出力が大きくなり、障害物の幅が狭い場合には、障害物からの反射波の反射出力が小さくなる。そのため、障害物の幅と、障害物に対応した反射出力モデルを用いることで適切に推定反射出力を予測することができる。
【0014】
さらに、推定反射出力算出手段は、障害物からの反射波の反射出力モデルを有し、第2の障害物検出手段によって検出された障害物の種類、幅、及び反射出力モデルに基づいて、推定反射出力を予測することが好適である。
【0015】
発信した電磁波に対する反射波の反射出力は、人と車など、障害物の種類によって異なる。そのため、障害物の幅、反射出力モデルに加えて、障害物の種類を用いることで適切に推定反射出力を予測することができる。
【0016】
また、反射出力モデルは正規分布関数であることが好適である。
【0017】
障害物に対する反射波の反射出力は障害物の幅に基づいた正規分布となることが知られている。そのため、反射出力モデルとして正規分布関数を用いることで適切に推定反射出力の算出を行うことができる。
【0018】
また、本発明に係る障害物認識装置は、車両に搭載され、前記車両の周囲の障害物を認識することが好適である。
【0019】
本発明に係る障害物認識装置を車両に搭載し、車両周囲の障害物を高精度に認識することにより、自車両と周囲に存在する障害物との衝突を適切に回避することができ、安全性を高めることができる。
【0020】
また、本発明に係る障害物認識方法は、電磁波を発信し、その反射波の反射出力に基づいて障害物を検出する第1の障害物検出工程と、第1の障害物検出工程とは異なる方法で障害物を検出する第2の障害物検出工程と、第2の障害物検出工程において検出された複数の障害物についてそれらの障害物の推定反射出力を合成した合成推定反射出力を算出する反射出力推定工程と、合成推定反射出力と第1の障害物検出工程において計測された計測反射出力との比較結果を用いて障害物を認識する障害物統合認識工程と、を含む。
【0021】
このように、本発明に係る障害物認識方法においては、第2の障害物検出工程における障害物検出結果に基づいて合成推定反射出力を算出し、合成推定反射出力と計測反射出力との比較結果を用いて障害物を認識することにより、第1の障害物検出工程において分離できない障害物が存在する場合にも、第1の障害物検出工程における障害物検出結果と第2の障害物検出工程における障害物検出結果が不整合となることが抑制され、適切な障害物検出を行うことが可能になる。これにより、高い精度で障害物を認識することができる。
【発明の効果】
【0022】
本発明によれば、複数のセンサによる障害物検出結果の整合をとることにより、高い精度で障害物を認識することができる障害物認識装置を提供することができる。
【図面の簡単な説明】
【0023】
【図1】本発明の実施形態に係る障害物認識装置のブロック構成図である。
【図2】本発明の実施形態に係る障害物認識装置の動作についてのフローチャートである。
【図3】前回予測値と今回検出結果のペアリング処理を示す図である。
【図4】ミリ波レーダが分離できないと予測される分離不可領域を算出する例を示す図である。
【図5】複数の障害物をグループ化する例を示す図である。
【図6】図6(a)は障害物が車である場合の推定反射出力の例を示す図であり、図6(b)は障害物が人である場合の推定反射出力の例を示す図である。
【図7】障害物の幅と、推定反射出力のピーク値との関係を示すグラフである。
【図8】グループ化された障害物の合成推定反射出力を示す図である。
【発明を実施するための形態】
【0024】
以下、添付図面を参照して、本発明の好適な実施形態について詳細に説明する。なお、以下の説明において、同一又は相当要素には同一符号を付し、重複する説明を省略する。
【0025】
図1は本発明の実施形態に係る障害物認識装置の構成概要図である。
【0026】
本実施形態に係る障害物認識装置1は、車両に搭載され、複数のセンサの計測結果を用いて車両の周囲に存在する障害物の認識を行う装置である。この駐車支援装置1は、ミリ波レーダ11(第1の障害物検出手段)、カメラ12(第2の障害物検出手段)、障害物認識ECU(Electronic Control Unit)2を備えている。
【0027】
障害物認識ECU2には、ミリ波レーダ11及びカメラ12が接続されている。ミリ波レーダ11は、車両前方に電波を照射し、物体の表面で反射された電波を受信し、受信信号の周波数変化から物体の有無、車両から見た物体の方位、車両から物体までの距離、物体の大きさ及び車両に対する物体の相対速度等の情報を取得する。また、ミリ波レーダ11は、検出した物体に関する各種情報を障害物認識ECU2に送出する。
【0028】
カメラ12は、車両前方を撮像し、車両前方の撮像画像を取得する。また、カメラ12は取得した車両前方の撮像画像を障害物認識ECU2に送出する。
【0029】
障害物認識ECU2は、例えばCPU、ROM、及びRAM等から構成され、障害物検知部21、障害物グルーピング処理部22(障害物グルーピング処理手段)、推定反射出力算出部23(反射出力推定手段)及び統合認識処理部24(障害物統合認識手段)を有している。障害物検出部21は、ミリ波レーダ11から出力されるレーダ情報に基づき、自車両周辺の障害物を含む領域を検出する。また、カメラ12から出力される画像情報に基づき障害物を含む領域を検出するとともに障害物の種類を認識する。カメラ12により検出された障害物情報は障害物グルーピング処理部22に出力される。
【0030】
障害物グルーピング処理部22は、画像情報に基づく障害物検出結果から、レーダ情報に基づく障害物検出では複数の障害物を分離することができずに単一の障害物として検出する可能性のある障害物を検出し、グループ化する。グループ化した障害物情報は推定反射出力算出部23に出力する。
【0031】
推定反射出力算出部23は、グループ化された障害物の種類、幅等の情報から推定反射出力を予測する。また、障害物毎に予測された推定反射出力を合成した合成推定反射出力を算出し、その結果を統合認識処理部24に出力する。
【0032】
統合認識処理部24は、ミリ波レーダ11に基づく障害物検出結果とカメラ12に基づく障害物検出結果の両方を用いて自車両の周囲に存在する障害物を認識する。また、合成推定反射出力とミリ波レーダ11によって計測された反射出力を比較し、その差分が所定値以下である場合はカメラ12による障害物検出結果を用いて障害物を分離して認識する。ここで、所定値とは予めECU2に設定される設定値である。この値はミリ波レーダ11とカメラ12の検出特性に依存して決定される。
【0033】
この障害物認識装置1は、好適には、車両衝突回避のための車両運転支援システムの一部として用いられる。この車両運転支援システムでは、障害物認識装置1により検出された障害物検出情報に基づいて、車両の運転者への警告処理、衝突回避のための制動準備処理及び衝突回避のため制動制御の一部又は全部を実行する。これらの処理の実行により、障害物との衝突回避又は障害物との衝突影響の軽減を図ることができる。
【0034】
次に本実施形態に係る障害物認識装置1の動作について説明する。
【0035】
図2は本発明の実施形態に係る障害物認識装置の動作についてのフローチャートである。図2における制御処理は、例えば障害物認識ECU2により予め設定された所定周期で繰り返し実行される。
【0036】
まず、図2に示すように、前回予測値と今回検出結果のペアリングが行われる(S10)。前回予測値と今回検出結果のペアリングは前回発見された障害物と障害物検出部21により今回検出された障害物との対応付けを行う処理である。図3を用いて前回予測値と今回検出結果のペアリング方法について説明する。図3における前回予測値Tは、前回の処理で発見された障害物と自車両との相対速度、位置情報等から予測される現時点における障害物の予測位置である。今回検出結果Rn及びCn(nは正の整数)は、それぞれミリ波レーダ11及びカメラ12の計測結果を読み込むことで検出される障害物の検出位置である。前回予測値Tに対して、ミリ波レーダ11による今回検出結果R1とカメラ12による今回検出結果C1が許容誤差範囲Aの内側に入っている場合には、前回の処理で発見された障害物と今回検出結果R1及びC1は同一の障害物であると判定される。
【0037】
また、ミリ波レーダ11による今回検出結果R1及びカメラ12による今回検出結果C1のどちらか一方が許容誤差範囲Aの内部に検出されない場合には、複数のセンサ間で検出結果の整合性がとれないことから、検出結果の信頼性が低いと判断され障害物認識は行われない。
【0038】
許容誤差範囲Aの設定方法は様々な方法が知られているが、本実施形態では、カメラによる障害物検知において予測される前後方向の誤差を長径、左右方向の誤差を短径とする楕円εcとミリ波レーダ11による障害物検知において予測される前後方向の誤差を短径、左右方向の誤差を長径とする楕円εrを設定し、楕円εcと楕円εrの長径を径とする楕円を許容誤差範囲Aとしている。
【0039】
次にS10によって取得された前回予測値と今回検出結果から新規障害物処理が行われる(S11)。図3に示す今回検出結果R2、C2のように、前回予測値がペアリングできない場合には、今回検出結果R2、C2は新規障害物候補として設定され、記憶される。
【0040】
続いて、障害物グルーピング処理部22により障害物グルーピング処理が行われる(S12)。障害物グルーピング処理では、ペアリングされた障害物及び新規障害物候補の中から、ミリ波レーダが複数の障害物を分離することができずに単一の障害物として誤認識する可能性のある障害物の候補がグループ化される。障害物グルーピング処理は、カメラ12によって得られた障害物検出結果を用いて行われる。
【0041】
図4は、ミリ波レーダが分離できないと予測される分離不可領域Fを算出する例である。図4に示すように、カメラ12から検出された障害物の幅Wと、カメラ12の幅方向の検出誤差σwの左右分と、ミリ波分離不可能距離dの左右分を加算したものが分離不可領域Fの幅として設定される。また、カメラ12により検出された障害物の高さHに、カメラ12の高さ方向の検出誤差σhの上下分を加算したものが分離不可領域Fの高さとして設定される。ここで、カメラ12の幅方向の検出誤差σw、σh及びミリ波分離不可能距離dは、それぞれ使用するカメラ、ミリ波レーダの検出特性に依存して決定される値とすればよい。
【0042】
次に、ペアリングできた障害物と新規障害物候補において自車両からの距離が同一範囲の複数の障害物において、分離不可領域Fが設定される。ここで、同一範囲とは、自車両から障害物までの距離が完全同一なもののみでなく、ミリ波レーダ11が距離方向で分離できない、略同一の距離も含むものである。そして、分離不可領域Fと他の障害物において重複する領域がある場合にはグループ化が行われる。図5は、複数の障害物を障害物グルーピング処理する例を示している。障害物グループGに属する障害物B1の分離不可領域F1は、他の障害物B2の一部と重複しているため、障害物B2は障害物グループGに追加される。さらに、障害物グループGに属する障害物B2の分離不可領域F2は、他の障害物B3の一部と重複しているため障害物B3は障害物グループGに追加される。障害物グループGに属する障害物B3の分離不可領域F3は、他の障害物B4の一部と重複しているため障害物B4は障害物グループGに追加される。
【0043】
続いて、S12でグループ化された障害物グループGに対して推定反射出力演算処理が行われる(S13)。推定反射出力演算処理では、グループ化された個々の障害物の推定反射出力が算出されるとともに、グループ化されたすべての障害物の推定反射出力を加算し、合成した合成推定反射出力が算出される。図6は個々の障害物の推定反射出力を算出する例を示している。推定反射出力は、カメラ12で検出した障害物の幅を標準偏差とする正規分布関数として算出される。また、推定反射出力のピーク値は障害物の種類(例えば車や人等)に基づいて設定される。図6(a)は障害物が車である場合の推定反射出力の例であり、図6(b)は障害物が人である場合の推定反射出力の例である。図6(a)、(b)に示すように、障害物が車である場合の推定反射出力のピーク値Pcarは、障害物が人である場合の推定反射出力のピーク値Ppedと比較して大きく設定される。また、障害物が車の場合でも、車の幅に基づいてピーク値Pcarを可変させることが好ましい。障害物の種類や幅と推定反射出力のピーク値の関係を示すテーブルは、障害物認識ECU2のROMに予め格納されており、障害物認識ECU2は、必要に応じてROMからテーブルを読み出して推定反射出力を算出する。
【0044】
また、センサとしてレーザレーダ等のカメラ以外のセンサを用いる場合であって、障害物の種類を認識することができない場合には、障害物の幅により推定反射出力のピーク値を設定してもよい。図7は障害物の幅と、対応する推定反射出力のピーク値との関係を示すグラフである。
【0045】
グルーピングされた障害物グループGの個々の障害物の推定反射出力が算出された後に、図8に示すように障害物グループGのすべての障害物の推定反射出力が加算され、その結果が合成推定反射出力となる。また、算出された推定反射出力から、微分値が0になる地点、すなわちピーク値がミリ波推定出力候補として設定される。図8の例では、P1及びP2がミリ波推定出力候補となる。
【0046】
S13で合成推定反射出力が算出されると、次に認識結果統合処理に移行する(S14)。認識結果統合処理では、まず、算出した合成推定反射出力とミリ波レーダ11で計測された反射出力が比較される。具体的には、計測された反射出力における複数個のピーク値とミリ波推定出力候補が比較され、その差分が所定値以下である場合には推定反射出力と計測反射出力とのマッチングがされたと判断される。ここで、所定値とはミリ波レーダ11とカメラ12の検出特性に依存して決定される値である。
【0047】
推定反射出力と計測反射出力がマッチングされた場合には、障害物グルーピング処理でグループ化された障害物群について、カメラ12による障害物検出結果を用いて障害物を分離して障害物が認識される。その上で、検出した障害物と前回予測値Tとのペアリングが行われることにより、障害物のトラッキング及び新規障害物検出が行われる。
【0048】
次に、次回値予測処理に処理が移行する(S15)。次回値予測処理では、S14において認識された障害物情報から、カルマンフィルタ等を利用して次回の障害物認識処理における障害物の予測位置が推定される。このような所定時間後の障害物の予測位置の推定方法は公知の方法が提案されているため、本明細書では詳細は省略する。推定された障害物の予測位置は、所定期間後の障害物認識処理におけるペアリングで利用される。
【0049】
以上のように、本実施形態に係る障害物認識装置1によれば、カメラ12による障害物検出結果に基づいて合成推定反射出力を算出し、ミリ波レーダ11による計測反射出力と比較することにより、ミリ波レーダ11では分離して検出できない障害物が存在する場合には、カメラ12の障害物検出結果を用いて障害物を分離して認識する。そのため、カメラ12の障害物検出結果とミリ波レーダ11の障害物検出結果が不整合となることが抑制され、適切な障害物検出を行うことが可能になる。これにより、高い精度で障害物を認識することができる。
【0050】
なお、本発明の好適な実施形態について説明したが、本発明は上記実施形態に限定されるものではない。例えば、本実施形態では、ミリ波レーダ11とカメラ12を用いて障害物認識を行っているが、カメラ12の代わりにレーザレーダ等の横方向の分解能が優れたセンサを用いて障害物検出を行うことも可能である。
【0051】
また、本実施形態では、障害物グルーピング処理において、分離不可領域Fと他の障害物において重複する領域がある場合にグルーピングを行っているが、分離不可領域Fと他の障害物の分離不可領域Fが重複する際に障害物をグループ化してもよい。
【0052】
さらに、本実施形態では、合成推定反射出力と計測反射出力とのマッチングを、計測された反射出力における複数個のピーク値とミリ波推定出力候補との差分により行っているが、異なる方法を用いてもよい。例えば、所定範囲において合成推定反射出力と計測反射出力の積分値を求め、それらの差分が所定値以下になるか否によりマッチングの判断をすることもできる。
【符号の説明】
【0053】
1…障害物認識装置、2…障害物認識ECU、11…ミリ波レーダ、12…カメラ、21…障害物検出部、22…障害物グルーピング処理部、23…推定反射出力算出部、24…統合認識処理部。
【特許請求の範囲】
【請求項1】
電磁波を発信し、その反射波の反射出力に基づいて障害物を検出する第1の障害物検出手段と、
前記第1の障害物検出手段とは異なる方法で障害物を検出する第2の障害物検出手段と、
前記第2の障害物検出手段により検出された複数の障害物についてそれらの障害物の推定反射出力を合成した合成推定反射出力を算出する反射出力推定手段と、
前記合成推定反射出力と前記第1の障害物検出手段により計測された計測反射出力との比較結果を用いて障害物を認識する障害物統合認識手段と、
を備える障害物認識装置。
【請求項2】
前記第1の障害物検出手段では分離して検出できないと予測される複数の障害物をグループ化する障害物グルーピング処理手段を更に備える、請求項1に記載の障害物認識装置。
【請求項3】
前記障害物統合認識手段は、前記合成推定反射出力と前記計測反射出力との差分が所定値以下である場合、前記第1の障害物検出手段では分離して検出できない複数の障害物を前記第2の障害物検出手段による検出結果に基づいて分離して認識する、請求項1又は2に記載の障害物認識装置。
【請求項4】
前記推定反射出力算出手段は、障害物からの反射波の反射出力モデルを有し、第2の障害物検出手段によって検出された障害物の幅及び前記反射出力モデルに基づいて、前記推定反射出力を予測する、請求項1〜3のいずれか1項に記載の障害物認識装置。
【請求項5】
前記推定反射出力算出手段は、障害物からの反射波の反射出力モデルを有し、第2の障害物検出手段によって検出された障害物の種類、幅、及び前記反射出力モデルに基づいて、前記推定反射出力を予測する、請求項1〜3のいずれか1項に記載の障害物認識装置。
【請求項6】
前記反射出力モデルは正規分布関数である請求項4又は5に記載の障害物認識装置。
【請求項7】
車両に搭載され、前記車両の周囲の障害物を認識する請求項1〜6のいずれか1項に記載の障害物認識装置。
【請求項8】
電磁波を発信し、その反射波の反射出力に基づいて障害物を検出する第1の障害物検出工程と、
前記第1の障害物検出工程とは異なる方法で障害物を検出する第2の障害物検出工程と、
前記第2の障害物検出工程において検出された複数の障害物についてそれらの障害物の推定反射出力を合成した合成推定反射出力を算出する反射出力推定工程と、
前記合成推定反射出力と前記第1の障害物検出工程において計測された計測反射出力との比較結果を用いて障害物を認識する障害物統合認識工程と、
を含む障害物認識方法。
【請求項1】
電磁波を発信し、その反射波の反射出力に基づいて障害物を検出する第1の障害物検出手段と、
前記第1の障害物検出手段とは異なる方法で障害物を検出する第2の障害物検出手段と、
前記第2の障害物検出手段により検出された複数の障害物についてそれらの障害物の推定反射出力を合成した合成推定反射出力を算出する反射出力推定手段と、
前記合成推定反射出力と前記第1の障害物検出手段により計測された計測反射出力との比較結果を用いて障害物を認識する障害物統合認識手段と、
を備える障害物認識装置。
【請求項2】
前記第1の障害物検出手段では分離して検出できないと予測される複数の障害物をグループ化する障害物グルーピング処理手段を更に備える、請求項1に記載の障害物認識装置。
【請求項3】
前記障害物統合認識手段は、前記合成推定反射出力と前記計測反射出力との差分が所定値以下である場合、前記第1の障害物検出手段では分離して検出できない複数の障害物を前記第2の障害物検出手段による検出結果に基づいて分離して認識する、請求項1又は2に記載の障害物認識装置。
【請求項4】
前記推定反射出力算出手段は、障害物からの反射波の反射出力モデルを有し、第2の障害物検出手段によって検出された障害物の幅及び前記反射出力モデルに基づいて、前記推定反射出力を予測する、請求項1〜3のいずれか1項に記載の障害物認識装置。
【請求項5】
前記推定反射出力算出手段は、障害物からの反射波の反射出力モデルを有し、第2の障害物検出手段によって検出された障害物の種類、幅、及び前記反射出力モデルに基づいて、前記推定反射出力を予測する、請求項1〜3のいずれか1項に記載の障害物認識装置。
【請求項6】
前記反射出力モデルは正規分布関数である請求項4又は5に記載の障害物認識装置。
【請求項7】
車両に搭載され、前記車両の周囲の障害物を認識する請求項1〜6のいずれか1項に記載の障害物認識装置。
【請求項8】
電磁波を発信し、その反射波の反射出力に基づいて障害物を検出する第1の障害物検出工程と、
前記第1の障害物検出工程とは異なる方法で障害物を検出する第2の障害物検出工程と、
前記第2の障害物検出工程において検出された複数の障害物についてそれらの障害物の推定反射出力を合成した合成推定反射出力を算出する反射出力推定工程と、
前記合成推定反射出力と前記第1の障害物検出工程において計測された計測反射出力との比較結果を用いて障害物を認識する障害物統合認識工程と、
を含む障害物認識方法。
【図1】


【図2】
【図3】
【図4】

【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2012−88285(P2012−88285A)
【公開日】平成24年5月10日(2012.5.10)
【国際特許分類】
【出願番号】特願2010−237677(P2010−237677)
【出願日】平成22年10月22日(2010.10.22)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成24年5月10日(2012.5.10)
【国際特許分類】
【出願日】平成22年10月22日(2010.10.22)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]