
障害物通知システムおよび障害物通知方法
【課題】車両の運転者に、障害物までの距離を直感的に伝えることができる障害物通知システムを提供する。
【解決手段】車両が有する座席の着座面の位置を変位させる機構と、自車両周辺の障害物と自車両との距離情報を取得する障害物検知手段と、前記取得された距離情報から、前記機構の駆動方法を決定する制御命令決定手段と、を有することを特徴とする。また、前記制御命令決定手段は、自車両と障害物との距離が近くなるに従って前記着座面の初期位置からの変位量を大きくし、もしくは、所定の時間ごとに前記着座面を動揺させる制御を行い、障害物との距離に応じて前記所定の時間を短くすることで、障害物との距離を運転者に伝達することが好ましい。また、前記制御命令決定手段は、障害物が位置する方向もしくは車両の進行方向に前記着座面を変位させる制御を行ってもよい。
【解決手段】車両が有する座席の着座面の位置を変位させる機構と、自車両周辺の障害物と自車両との距離情報を取得する障害物検知手段と、前記取得された距離情報から、前記機構の駆動方法を決定する制御命令決定手段と、を有することを特徴とする。また、前記制御命令決定手段は、自車両と障害物との距離が近くなるに従って前記着座面の初期位置からの変位量を大きくし、もしくは、所定の時間ごとに前記着座面を動揺させる制御を行い、障害物との距離に応じて前記所定の時間を短くすることで、障害物との距離を運転者に伝達することが好ましい。また、前記制御命令決定手段は、障害物が位置する方向もしくは車両の進行方向に前記着座面を変位させる制御を行ってもよい。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、障害物通知システムに関し、特に自動車において好適なものである。
【背景技術】
【0002】
センサ技術を用いて、自動車の運転を支援する装置が普及し始めている。例えば、自車周辺の障害物を検出するセンサを車体に設置し、障害物との衝突の危険がある場合、事前に運転者に警告を行う技術が知られている。
【0003】
障害物との衝突の危険がある場面において、運転者に警告を行う方法には、主に音声によるもの、油圧によって瞬間的にブレーキをかけるもの、シートベルトの引き込みを行うもの等がある。
【0004】
また、衝突回避を目的としたものだけでなく、車両周辺の障害物を検知し、運転者に通知を行うことで、車庫入れや狭隘路の走行時における利便性を向上させるための装置も同様に普及し始めている。この装置はクリアランスソナー等と呼ばれ、音声や画面表示によって障害物との間隔を運転者に通知するものが一般的である。
【0005】
特許文献1には、車両用安全装置に関する発明が記載されており、障害物に衝突する可能性を検知した場合、シートベルトを巻き上げることによって張力を増加させ、運転者に危険を通知する技術が開示されている。これにより、運転者は障害物の接近による衝突の可能性をいち早く知ることができる。
【0006】
また、特許文献2には、車両用障害物通知装置に関する発明が記載されており、車両周辺に障害物を検出した場合、運転者に対して該当する方向に仮想音源を生成し、対応する位置に設けられた表示装置に所定の注意表示を行うことで運転者に注意を喚起する技術が開示されている。これにより、運転者は車両から見てどちらの方向から障害物が接近しているかを聴覚および視覚を通じて直感的に知ることができる。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開平9−175327号公報
【特許文献2】特開2007−122536号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
特許文献1に記載されている発明によると、車両に衝突の危険性が生じた場合は、シートベルトの巻き上げが瞬時に行われるため、聴覚や視覚によって通知を行う場合と比較して、運転者は危険を直感的に察知することができる。しかし、当該発明は、車両周囲の全方向にある障害物を検出することができないため、たとえば側方より二輪車が接近している場合や、後退中に壁に接近した場合、運転者は障害物の存在を認識することができないという問題がある。また、当該発明は危険回避のための発明であり、障害物までの距離を知ることはできない。
【0009】
また、特許文献2に記載されている発明によると、車両の周辺障害物を検出した場合、複数のスピーカによって仮想音源を生成し、検出された障害物の方向に仮想音源が位置するように制御を行うため、運転者は、音声が聞こえてきた方向に障害物があるということを直感的に知ることができる。また、同時に表示装置を用いることで、障害物についての
詳細な情報を視覚的にも知ることができる。
【0010】
しかし、音声による通知を行う場合、静かな車内環境でしか装置を使用することができないという欠点がある。たとえば、車内で音楽を聴いていた場合や、窓を開けていた場合、騒音によって警告音が聞き取りづらくなるため、障害物の認知が遅れる可能性がある。また、画面表示を用いた場合、運転者が表示装置を注視しなければならない。加えて、運転者が表示装置を目視した後、車両に対してどの方向に障害物があるのか、視覚情報から判断しなければならないため、咄嗟の判断がしにくいという問題がある。
【0011】
本発明は上記の問題点を考慮してなされたものであり、車両の運転者に、障害物までの距離を直感的に伝えることができる障害物通知システムを提供することを目的とする。
【課題を解決するための手段】
【0012】
上記目的を達成するために、本発明に係る障害物通知システムでは、以下の手段により車両の運転者に障害物までの距離を通知する。
【0013】
本発明に係る障害物通知システムは、車両が有する座席の着座面の位置を変位させる機構と、自車両周辺の障害物と自車両との距離情報を取得する障害物検知手段と、前記取得された距離情報から、前記機構の駆動方法を決定する制御命令決定手段と、を有することを特徴とする。
【0014】
座席に内蔵された機構とは、着座面を変位させるための駆動機構であり、たとえば電動アクチュエータや油圧シリンダによって構成することができる。このように構成することにより、車両が備えているセンサが取得した情報に応じて、運転者が座っている座席に内蔵された機構を駆動することができる。当該機構を駆動することによって、触力覚、つまり体に触れている部分が動く感覚によって情報を伝えることができるため、視覚もしくは聴覚によって情報を伝達する場合と比較して、より直感的に、より高速に情報を伝えることができるという利点がある。
【0015】
また、前記制御命令決定手段は、自車両と障害物との距離が近くなるに従って前記着座面の初期位置からの変位量が大きくなるよう制御を行うことを特徴としてもよい。
【0016】
このように構成することにより、車両と障害物との距離が近くなるにしたがって、着座面が動く幅が大きくなるため、運転者は車両が障害物に対してどの程度接近しているのかを直感的に知ることができる。
【0017】
また、前記制御命令決定手段は、車両の進行方向に前記着座面を変位させる制御を行うことを特徴としてもよく、障害物が位置する方向に前記着座面を変位させる制御を行うことを特徴としてもよい。
【0018】
座面を車両の進行方向に変位させることで、運転者は窮屈感を得るため、障害物の存在を確実に知ることができる。また、座面を障害物が位置する方向に変位させることで、運転者は、着座面が動く方向に障害物があることを直感的に知ることができる。
【0019】
また、前記制御命令決定手段は、自車両と障害物との距離が所定の距離となった場合に前記着座面を動揺させる制御を行うことを特徴としてもよい。
【0020】
動揺とは、着座面の位置が変位したのちに動作前の位置に復帰することを指す。このように構成することにより、障害物までの距離が定められた値を下回った場合に着座面を動揺させることができるため、運転者は障害物に対する正確な距離を知ることができる。な
お、着座面の変位は、特定の方向に限定されるものではない。
【0021】
また、前記制御命令決定手段は、所定の時間ごとに前記着座面を動揺させる制御を行い、前記所定の時間は、車両と障害物との距離が近くなるに従って短くなることを特徴としてもよい。
【0022】
特定の周期で着座面を動かすことにより、障害物までの残された距離がどの程度あるのかを運転者に伝達することができる。たとえば、距離に余裕がある場合は1秒に1回着座面を動かし、余裕が無くなってきた場合は1秒に3回、停止すべき位置に達した場合は1秒に5回とすることによって、運転者は障害物までの距離を具体的に知ることができる。
【0023】
また、前記機構は、着座面の一部を垂直方向に変位させる複数の機構を含み、前記障害物検知手段は、自車両に対する障害物の方向をさらに取得し、前記制御命令決定手段が、前記取得した方向に対応する位置にある機構を駆動することを特徴としてもよい。
【0024】
座席に、垂直方向に座面を変位させる複数の駆動機構を内蔵し、車両から見て障害物が位置する方向を検知する手段をさらに設けることで、障害物が存在する方向に対応する駆動機構を駆動させることができる。これにより、例えば、車両右側方に障害物がある場合、着座面の右側に内蔵された駆動機構のみを駆動させることができ、右方に注意を向けなければならないことを運転者に伝達することができる。
【発明の効果】
【0025】
本発明によれば、車両の運転者に、障害物までの距離を直感的に伝えることができる障害物通知システムを提供することができる。
【図面の簡単な説明】
【0026】
【図1】本発明に係る障害物通知システムの機能構成図である。
【図2】車両に備えられたセンサの配置図である。
【図3】第一の実施形態に係る処理フローチャートである。
【図4】障害物検知部が取得した情報を表す図である。
【図5】第一の実施形態に係る駆動情報データの例である。
【図6】第一の実施形態に係る駆動情報データの他の例である。
【図7】第一の実施形態に係るアクチュエータの配置図である。
【図8】第一の実施形態の変形例に係る駆動情報データの例である。
【図9】第二の実施形態に係るアクチュエータの配置図である。
【図10】第二の実施形態に係る駆動情報データの例である。
【図11】第三の実施形態に係るアクチュエータの配置図である。
【図12】第三の実施形態に係る駆動情報データの例である。
【図13】第三の実施形態に係るアクチュエータ駆動例である。
【図14】第四の実施形態に係るアクチュエータの配置図である。
【図15】第四の実施形態に係る駆動アクチュエータ決定データである。
【発明を実施するための形態】
【0027】
(システムの構成)
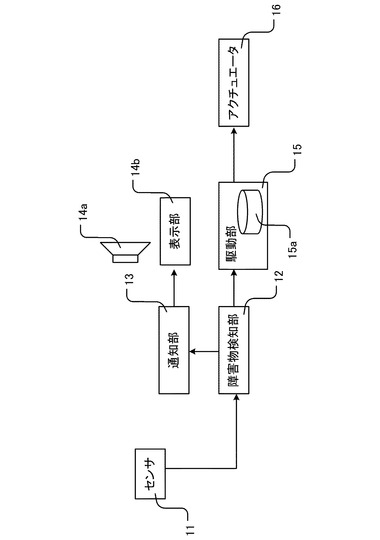
第一の実施形態に係る障害物通知システムの概要について説明する。図1は、第一の実施形態に係る障害物通知システムの機能構成を示した図である。
【0028】
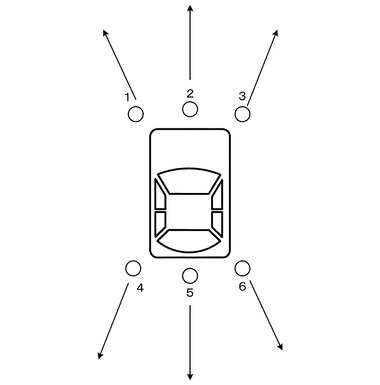
センサ11は、自車両と障害物との間の距離を検出するセンサである。センサ11は、たとえばミリ波レーダーや超音波レーダーなどによって構成され、障害物からの反射波に基づいて距離を検出する機能を有する。センサ11は、車両の前方および後方に設置され
た複数のセンサから構成されており、図2のような配置とすることができる。各センサは、検出した距離情報を障害物検知部12へ送信する。
【0029】
障害物検知部12は、取得した距離情報をもとに、障害物との距離および方向を決定する手段である。例えば、図2のセンサ配置において、センサ3のみに反応があった場合、右前方に障害物があることがわかる。また、センサ5のみに反応があった場合、後方にオートバイや軽車両などの小さな障害物があることが、センサ4〜6に反応があった場合、車両後方に他の車両もしくは大きな建造物などがあることがわかる。障害物検知部12は、取得した障害物との距離および方向についての情報を、通知部13と駆動部15へ送信する。障害物との距離および方向の決定方法については後述する。
【0030】
通知部13は、運転者に対して表示または音声によって障害物の存在を通知するための制御手段である。通知手段として、スピーカ14aまたは表示部14bが接続されており、障害物との距離または方向を、音声または画面表示などによって行う。通知部13、スピーカ14a、表示部14bについては、運転者に対して行う通知の補助的役割を担うものであり、通知部やスピーカ、表示部を設けることは必須ではない。
【0031】
駆動部15は、本発明における制御命令決定手段であり、座席に内蔵されたアクチュエータの駆動制御を行う手段である。駆動部15は、入力された、障害物との距離および方向についての情報から、アクチュエータを駆動する制御命令を決定する駆動情報データ15aを有している。詳細な制御命令の決定方法については後述する。
【0032】
なお、本システムは、CPU(中央演算処理装置)、主記憶装置、補助記憶装置などのハードウェア資源を備えたコンピュータにより構成することができる。また、障害物検知部12、通知部13、駆動部15については、エレクトリックコントロールユニット(ECU)などの車載コンピュータによって実現されることが望ましい。
【0033】
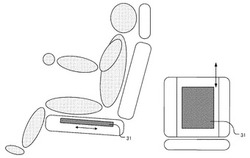
アクチュエータ16は、座席に設けられた、座面の位置を変位させる手段である。アクチュエータ16は、座席の座面下部に配置され、制御命令に従ってたとえば着座面を前後方向にスライドさせ(図7)、もしくは、座面を部分的に隆起および沈降させる(図11)機能を有している。アクチュエータ16は、ソレノイドを利用したリニアアクチュエータであることが好ましいが、油圧などを利用したものや、直動型以外のものであっても構わない。
【0034】
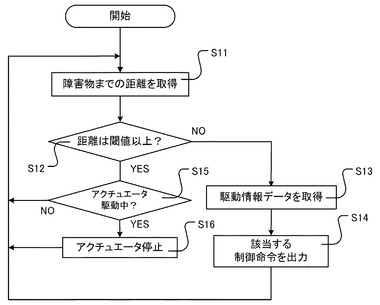
以下に、本発明に係る障害物通知システムの動作フローチャートである図3を参照しながら、各手段の動作について詳細に述べる。
【0035】
(第一の実施形態)
本発明に係る障害物通知システムが動作を開始すると、障害物検知部12が、センサ11から距離情報を取得する(S11)。車両に備えられたセンサが検知した全ての距離情報は、障害物検知部12が取得することができる。
【0036】
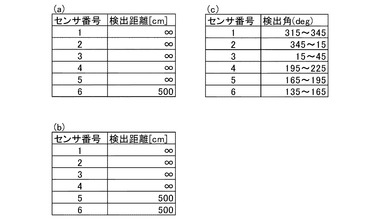
図4(a)および(b)は、障害物検知部12が取得した情報の内容例を表したものである。障害物検知部12は、これらの各センサから取得した距離情報のほか、図4(c)に例示したように、各センサが障害物を検出できる角度についての情報を有している。これらの情報によって、障害物検知部12は、障害物が車両に対してどこに位置しているかを算出することができる。なお、図4(c)における検出角は、車両正面を0度とし、右方を90度、背面を180度、左方を270度としている。
【0037】
例えば、図4(a)に示した例の場合、センサ6のみが500cmという数値を検出し
ているため、車両正面から135〜165度右の方向、5mの距離に障害物があると判定することができる。また、各センサには検出することができる角度(指向角)があるため、各センサからの情報と、図4(c)の情報を用いて補正を行ってもよい。たとえば、図4(b)に示した例の場合、センサ5、センサ6が共に500cmという数値を検出しているため、車両正面から165度右の方向、5mの距離に障害物があると判定してもよいし、車両背面5mの距離と、車両正面から150度右の方向、5mの距離にそれぞれ障害物があると判定してもよい。本実施形態では、6個のセンサを使用したが、センサの数が増えることによってより正確な障害物の位置判定が可能となる。
【0038】
障害物検知部12が取得した、障害物に対する距離と方向の情報、例えば「車両正面から150度右の方向、5mの距離に障害物」という情報は、駆動部15へ送られる。
【0039】
駆動部15は、まず、車両と障害物との距離を閾値と比較する(S12)。障害物検知部12が取得した全ての距離情報が閾値以上である場合、車両周辺に障害物は無いと判断し、処理は初期状態に戻る。このとき、アクチュエータが駆動中であった場合(S15)、当該アクチュエータを停止させ、座面を初期位置に戻す(S16)。運転者に障害物を通知する必要がないためである。なお、本願明細書にて述べている実施形態においては、当該距離の閾値をaとする。
【0040】
障害物との距離が閾値より小さかった場合、駆動部15は、記憶されている駆動情報データを取得する(S13)。そして、障害物検知部12が取得した情報と、当該駆動情報データから、アクチュエータの位置を決定し、アクチュエータが決定された位置に移動するよう制御命令を送信する(S14)。
【0041】
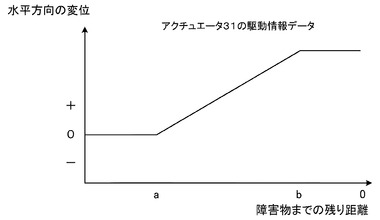
ここで、駆動情報データの例を示した図である図5を参照しながら、駆動情報データについて説明する。駆動情報データとは、たとえば、「障害物までの距離が、1m近づくごとに座面を一定の幅で振動させる」といったものや、「障害物に近づくほど座面の変位量を大きくする」といった、アクチュエータをどのように駆動するかといった手順を表す情報である。図5の例では、障害物までの距離をX軸に、座面の水平方向の変位量をY軸にとり、「障害物までの残り距離がaからbである場合において、距離に比例して座面をプラス方向(前方)に動かす」という動作を定義している。この定義、つまり障害物までの距離と、座面の変位量を対応づけたデータが、本実施形態における駆動情報データ15aの内容である。
【0042】
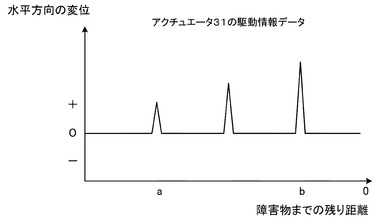
また、図6は、駆動情報データの別の例を示したものである。図6の例では、同様に障害物までの距離をX軸に、座面の水平方向の変位量をY軸にとり、「障害物までの残り距離がaからbである場合において、一定の距離を近づくごとに座面を動揺させ、距離に比例してその振動幅を大きくする」という動作を定義している。
【0043】
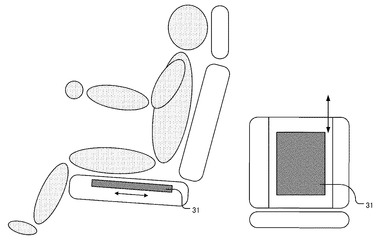
図7は、第一の実施形態に係る、アクチュエータの配置を表した図である。図7に示したアクチュエータ31が、図1のアクチュエータ16に対応する。アクチュエータ31は前後にスライドする座面機構に連結されて配置されており、座面を前後方向に変位させることができる。図5の内容に従って駆動した場合、障害物までの距離がaとなった地点で駆動部15はアクチュエータ31に対して制御命令を発行し、座面が前方向に動き始める。距離がbとなったら、アクチュエータ31は停止する。
【0044】
このように構成することにより、運転者は、障害物までの残り距離を触力覚によって知ることができる。座面が駆動を開始する位置と、駆動を終了する位置を定義することによって、車両が、障害物に対して注意を要する領域に入ったこと、および、停止すべき位置に達したことを容易に運転者に通知することができる。また、運転者は、座面が前方に移
動することによって窮屈感を得られるため、音声などによる通知と異なり、システムの動作に気づかないということがない。
【0045】
本実施形態においては、座面を車両の進行方向(前方)へスライドさせたが、他の方向へスライドさせても構わない。例えば、障害物が前方にある場合は座面を前方に、後方にある場合は座面を後方にスライドさせてもよい。また、前後後方に動くアクチュエータと、左右方向に動くアクチュエータを組み合わせ、障害物の方向に応じて動かす方向を決定してもよい。
【0046】
また、座面の移動は、単方向ではなく複数の方向を組み合わせても構わない。例えば、後退しながら車庫入れを行う場面において、後ろより壁面が近づいてきたら徐々に座面を後方向に移動させ、停止すべき位置に達した場合、一気に前方向に押し出すことにより、運転者に対して衝突する感覚を伝え、注意を喚起することができる。従来であれば、車庫入れにおいて、停止位置は車止めに車輪が当たる感覚でしか知ることができなかったが、このように構成することにより、車止めが無い駐車場はもとより、縦列駐車などにおいても確実に停止位置を知ることができる。
【0047】
また、駆動情報データ15aの定義方法については、例示した、値をX−Yの二次元グラフで保持する方法のほか、距離と変位量を対応付けられる方法であれば他の方法を用いても構わない。
【0048】
また、本実施形態の駆動情報データ15aは、障害物までの距離をX軸にとったが、例えば障害物に対する相対速度や相対加速度などを用いても構わない。障害物検知部12が、読み取った距離を時間で微分することによって、障害物に対する相対速度、相対加速度を算出し、駆動部15が、算出した値に応じてアクチュエータ31を駆動させることも可能である。
【0049】
なお、図3のフローチャートは、連続して繰り返し実行されてもよいし、障害物までの距離が変化した場合において繰り返し実行されてもよい。
【0050】
(第一の実施形態の変形例)
第一の実施形態においては、障害物までの距離に応じて座面の変位量を決定したが、本変形例では、さらに座面の移動速度を制御する。
【0051】
本変形例に係るアクチュエータの配置方法、システムの構成および処理フローの詳細については、第一の実施形態と同様である。
【0052】
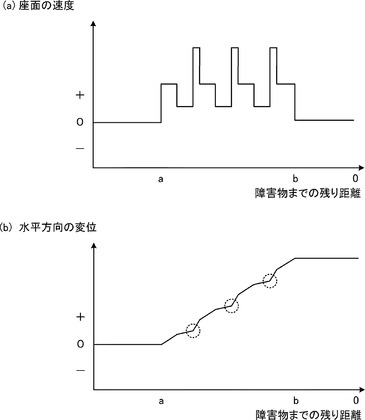
図8(a)および(b)は、本実施形態における、駆動情報データ15aの内容を表した図である。第一の実施形態が、障害物までの距離に応じて座面の変位量を決定するのに対し、本変形例では、座面の移動速度に緩急をつけることで衝撃感を創出し、障害物までの残り距離を表現する。図8(a)は、座面の水平方向の移動速度と障害物との距離との関係を示した図であり、図8(b)は、座面の水平方向の変位量と障害物との距離との関係を示した図である。
【0053】
図8に示した内容に従ってアクチュエータを駆動した場合、駆動部15は、障害物までの距離が閾値であるaとなった地点でアクチュエータ31に対して制御命令を発行し、座面の移動を開始する。障害物までの距離があらかじめ定められた距離に達すると、座面の移動速度を図8(a)のように変化させる。これにより、座面の変位量は図8(b)のようになるため、移動速度が変化する丸印破線部分にて、運転者に衝撃感を与えることができる。あらかじめ定められた距離とは、たとえば残り距離が5m、4m、3mとなる地点
といったように一定間隔で設定することができる。
【0054】
このように駆動情報データ15aを定義することにより、障害物までの距離感覚を座面の変位によって表現するのと同時に、衝撃感を運転者に与えることで正確な残り距離を伝達することが可能になる。本変形例を第一の実施形態と比較すると、停止すべき位置までの距離が把握しやすいというさらなる利点がある。
【0055】
なお、本変形例においては、3段階の移動速度を用いて衝撃感を創出したが、運転者に衝撃感を与えることができれば他のパターンを使用してもよい。
【0056】
(第二の実施形態)
第一の実施形態においては、座面を前後方向に変位させるアクチュエータを使用したが、本実施形態では、座面を上下方向に変位させるアクチュエータを追加する。
【0057】
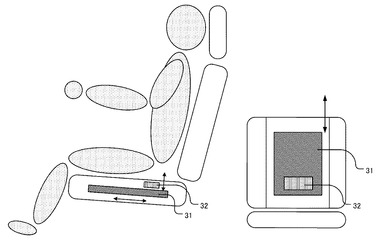
図9は、本実施形態に係るアクチュエータの配置を表した図である。本実施形態に係る座席は、座面を前後方向に変位させるためのアクチュエータ31に加え、座面を上下方向に変位させるためのアクチュエータ32を有している。アクチュエータ32は、上下方向に駆動し、座面の全体または一部を隆起または沈降させることができる。アクチュエータ31およびアクチュエータ32が、図1のアクチュエータ16に対応する。
【0058】
本実施形態におけるシステムの構成および処理フローの詳細については、第一の実施形態と同様である。
【0059】
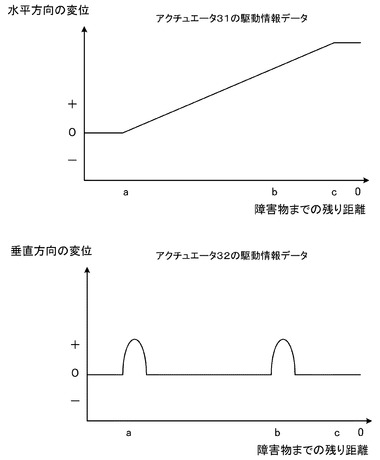
図10は、本実施形態における、駆動情報データ15aの内容を表した図である。図10の内容に従ってアクチュエータを駆動した場合、駆動部15は、障害物までの距離が閾値であるaとなった地点でアクチュエータ31に対して制御命令を発行し、座面が前方向に動き始める。同時に、アクチュエータ32に対しても制御命令を発行し、座面を一瞬だけ隆起させ、元に戻す。距離がbとなったら、再度アクチュエータ32に対して制御命令を発行し、座面を隆起させ、元に戻す。距離がcとなったら、アクチュエータ31は停止する。
【0060】
このように、複数のアクチュエータを座席に内蔵し、水平方向の動きと垂直方向の動きを制御することにより、複数の情報を運転者に伝達することが可能になる。本実施形態では、距離の節目となる位置で、座面を垂直に隆起させることで、何かを乗り越える感覚を運転者に与え、障害物までの残り距離を伝えやすくしている。例えば、残り5m地点で一回目の隆起、残り1m地点で二回目の隆起、のように設定しておくことで、車両を停止させる目標位置を把握することが容易になる。
【0061】
また、このように構成することにより、具体的な数値を運転者に伝達することができるため、たとえば、前方500mに渋滞の最後尾がある場合、5回の振動を与え、100m進むごとに振動が一回ずつ減る、といった動作も可能である。この場合、センサ11には超音波センサのかわりに、渋滞情報を取得できる車載端末を用いてもよい。
【0062】
(第三の実施形態)
第三の実施形態においては、障害物が接近している場合において、一定の間隔で座面を変位させ、その間隔を変更することによって運転者に距離を伝達する。
【0063】
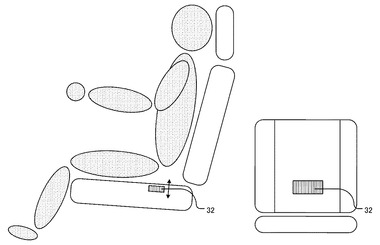
図11は、第三の実施形態に係るアクチュエータの配置を表した図である。本実施形態に係る座席は、座面を上下方向に変位させるためのアクチュエータ32のみを有している。
【0064】
本実施形態におけるシステムの構成および処理フローの詳細については、第一の実施形態と同様である。
【0065】
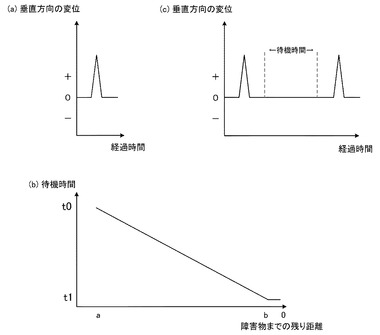
図12(a)および(b)は、本実施形態における、駆動情報データ15aの内容を表した図である。本実施形態では、座面を一瞬隆起させ、元に戻す動きを一つの動作パターンとし、障害物との距離が所定の距離以下である領域において、当該パターンを繰り返す。繰り返しの間には、一定の待機時間が挿入される。図12(a)は、前記動作パターンを表した図であり、図12(b)は、前記待機時間と障害物との距離との関係を示した図である。
【0066】
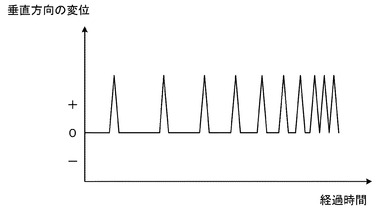
図12(a)および(b)の内容に従ってアクチュエータを駆動した場合、駆動部15は、障害物までの距離が閾値であるaとなった地点でアクチュエータ32に対して制御命令を発行し、待機時間t0で繰り返し座面を駆動する。障害物までの距離が小さくなるに従って、待機時間は徐々に短くなり、距離がbに達すると、待機時間はt1となり、ほぼ連続した振動となる。この動きを、経過時間をX軸に、垂直方向の変位をY軸にとって表現すると図13のようになる。
【0067】
このように、駆動情報データ15aを、駆動パターンと駆動間隔(待機時間)の二つで定義することにより、アクチュエータが振動する間隔で運転者に距離を伝達することが可能になる。第一の実施形態と比較すると、停止すべき位置までの距離感覚が把握しやすいという利点がある。
【0068】
本実施形態においては、アクチュエータ32の駆動パターンに上下振動を用いたが、アクチュエータ31と同様に前後運動をさせてもよい。また、本実施形態においては、アクチュエータ32の駆動パターンにのこぎり波を使用したが、三角波や矩形波を用いてもよい。
【0069】
(第四の実施形態)
第四の実施形態においては、座面に複数のアクチュエータを内蔵し、障害物の方向に応じて駆動させるアクチュエータを変更する。
【0070】
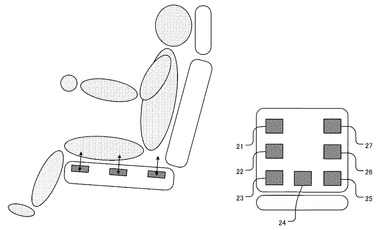
図14は、第四の実施形態に係るアクチュエータの配置を表した図である。本実施形態では、アクチュエータ21から27までの7個のアクチュエータが座面に内蔵されており、それぞれが上下方向に座面を変位させることができる。
【0071】
本実施形態にて用いる駆動部15は、他の実施形態に加え、駆動するアクチュエータを決定するためのデータをさらに有している。図15は、センサ番号とアクチュエータ番号の対応が定義されたデータであり、駆動部15は、このデータを用いて駆動するアクチュエータを決定する。データの読み込みは、図3のフローチャートにおけるステップS13にて行う。
【0072】
たとえば、図15の例において、センサ1のみに反応があった場合、アクチュエータ21が駆動の対象となる。また、センサ2のみに反応があった場合、アクチュエータ21および27が駆動の対象となる。センサ1と4に反応があった場合、アクチュエータ21,22,23の3つが駆動の対象となる。この判断は、フローチャートにおけるステップS14にて行われ、それぞれ該当するアクチュエータに制御命令が出力される。
【0073】
なお、本実施形態におけるシステムの構成および処理フローの詳細については、ステップS13およびS14を除いて第一の実施形態と同様である。また、アクチュエータの駆
動方法については、第二の実施形態で示した、障害物との距離が所定値となった場合に駆動する方法や、第三の実施形態で示した、障害物との距離に応じて駆動間隔を変更する方法などを使用することができる。
【0074】
また、本実施形態においては、上下方向に座面を変位するアクチュエータを複数配置したが、水平方向に座面を変位するアクチュエータを複数配置してもよい。たとえば、座面の左半分と右半分をそれぞれ前後に変位できるアクチュエータを使用し、障害物の方向と同じ方向のアクチュエータを駆動させてもよい。この場合、アクチュエータの駆動方法については、第一の実施形態で示した、障害物との距離に応じて変位幅を変更する方法などを使用することができる。
【0075】
このように構成することにより、運転者は、障害物がある方向を視覚および聴覚に頼ることなく直感的に知ることができる。
【0076】
上記の実施形態はあくまでも一例であって、本発明はその要旨を逸脱しない範囲内で適宜変更して実施しうるものである。たとえば、ミリ波レーダーや超音波レーダー以外に、車外カメラを用いて車両周辺の障害物を検出してもよいし、目的に応じてアクチュエータおよびセンサの数は増減させてもよい。
【0077】
また、運転者への通知を確実に行うため、アクチュエータ31および32の駆動と同時に、スピーカ14aから音声を出力し、あるいは表示部14bに障害物の方向や距離を表示してもよい。たとえば、路面に凹凸を設けて運転者に注意を喚起する道路舗装が知られているが、当該舗装を走行した場合のロードノイズを再現した音を、アクチュエータの動作と同期して鳴らしてもよい。
【0078】
また、例示した実施形態においては、一つのアクチュエータに一つの駆動情報データ15aを対応させたが、複数の駆動情報データ15aを記憶させ、自車の速度域ごとに使用するデータを切り替えるなどしても構わない。このように構成することで、たとえば高速で走行している場合は、安全のために警告を与える距離の閾値を大きくし、低速で移動している場合は、警告を与える距離の閾値を小さくするといったことが可能になる。
【0079】
また、駆動情報データ15aの選択は、速度以外によって行ってもよい。たとえば、運転者の視界にある前方のセンサに反応がある場合は、警告を与える距離の閾値を小さくとり、運転者が視認できない場所である後方のセンサのみに反応がある場合は、警告を与える距離の閾値を大きくとり、早めに警告を発してもよい。
【0080】
また、駆動情報データ15aについては、第一の実施形態では距離と座面変位量の関係を表すデータを例示し、第二の実施形態では時間と座面変位量、および距離と駆動間隔の関係を表すデータを例示したが、運転者に障害物までの距離および方向を伝達できる形式であれば、他の関係を用いても構わない。
【符号の説明】
【0081】
11 センサ
12 障害物検知部
13 通知部
14a スピーカ
14b 表示部
15 駆動部
15a 駆動情報データ
16 アクチュエータ
21〜27,31,32 アクチュエータ
【技術分野】
【0001】
本発明は、障害物通知システムに関し、特に自動車において好適なものである。
【背景技術】
【0002】
センサ技術を用いて、自動車の運転を支援する装置が普及し始めている。例えば、自車周辺の障害物を検出するセンサを車体に設置し、障害物との衝突の危険がある場合、事前に運転者に警告を行う技術が知られている。
【0003】
障害物との衝突の危険がある場面において、運転者に警告を行う方法には、主に音声によるもの、油圧によって瞬間的にブレーキをかけるもの、シートベルトの引き込みを行うもの等がある。
【0004】
また、衝突回避を目的としたものだけでなく、車両周辺の障害物を検知し、運転者に通知を行うことで、車庫入れや狭隘路の走行時における利便性を向上させるための装置も同様に普及し始めている。この装置はクリアランスソナー等と呼ばれ、音声や画面表示によって障害物との間隔を運転者に通知するものが一般的である。
【0005】
特許文献1には、車両用安全装置に関する発明が記載されており、障害物に衝突する可能性を検知した場合、シートベルトを巻き上げることによって張力を増加させ、運転者に危険を通知する技術が開示されている。これにより、運転者は障害物の接近による衝突の可能性をいち早く知ることができる。
【0006】
また、特許文献2には、車両用障害物通知装置に関する発明が記載されており、車両周辺に障害物を検出した場合、運転者に対して該当する方向に仮想音源を生成し、対応する位置に設けられた表示装置に所定の注意表示を行うことで運転者に注意を喚起する技術が開示されている。これにより、運転者は車両から見てどちらの方向から障害物が接近しているかを聴覚および視覚を通じて直感的に知ることができる。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開平9−175327号公報
【特許文献2】特開2007−122536号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
特許文献1に記載されている発明によると、車両に衝突の危険性が生じた場合は、シートベルトの巻き上げが瞬時に行われるため、聴覚や視覚によって通知を行う場合と比較して、運転者は危険を直感的に察知することができる。しかし、当該発明は、車両周囲の全方向にある障害物を検出することができないため、たとえば側方より二輪車が接近している場合や、後退中に壁に接近した場合、運転者は障害物の存在を認識することができないという問題がある。また、当該発明は危険回避のための発明であり、障害物までの距離を知ることはできない。
【0009】
また、特許文献2に記載されている発明によると、車両の周辺障害物を検出した場合、複数のスピーカによって仮想音源を生成し、検出された障害物の方向に仮想音源が位置するように制御を行うため、運転者は、音声が聞こえてきた方向に障害物があるということを直感的に知ることができる。また、同時に表示装置を用いることで、障害物についての
詳細な情報を視覚的にも知ることができる。
【0010】
しかし、音声による通知を行う場合、静かな車内環境でしか装置を使用することができないという欠点がある。たとえば、車内で音楽を聴いていた場合や、窓を開けていた場合、騒音によって警告音が聞き取りづらくなるため、障害物の認知が遅れる可能性がある。また、画面表示を用いた場合、運転者が表示装置を注視しなければならない。加えて、運転者が表示装置を目視した後、車両に対してどの方向に障害物があるのか、視覚情報から判断しなければならないため、咄嗟の判断がしにくいという問題がある。
【0011】
本発明は上記の問題点を考慮してなされたものであり、車両の運転者に、障害物までの距離を直感的に伝えることができる障害物通知システムを提供することを目的とする。
【課題を解決するための手段】
【0012】
上記目的を達成するために、本発明に係る障害物通知システムでは、以下の手段により車両の運転者に障害物までの距離を通知する。
【0013】
本発明に係る障害物通知システムは、車両が有する座席の着座面の位置を変位させる機構と、自車両周辺の障害物と自車両との距離情報を取得する障害物検知手段と、前記取得された距離情報から、前記機構の駆動方法を決定する制御命令決定手段と、を有することを特徴とする。
【0014】
座席に内蔵された機構とは、着座面を変位させるための駆動機構であり、たとえば電動アクチュエータや油圧シリンダによって構成することができる。このように構成することにより、車両が備えているセンサが取得した情報に応じて、運転者が座っている座席に内蔵された機構を駆動することができる。当該機構を駆動することによって、触力覚、つまり体に触れている部分が動く感覚によって情報を伝えることができるため、視覚もしくは聴覚によって情報を伝達する場合と比較して、より直感的に、より高速に情報を伝えることができるという利点がある。
【0015】
また、前記制御命令決定手段は、自車両と障害物との距離が近くなるに従って前記着座面の初期位置からの変位量が大きくなるよう制御を行うことを特徴としてもよい。
【0016】
このように構成することにより、車両と障害物との距離が近くなるにしたがって、着座面が動く幅が大きくなるため、運転者は車両が障害物に対してどの程度接近しているのかを直感的に知ることができる。
【0017】
また、前記制御命令決定手段は、車両の進行方向に前記着座面を変位させる制御を行うことを特徴としてもよく、障害物が位置する方向に前記着座面を変位させる制御を行うことを特徴としてもよい。
【0018】
座面を車両の進行方向に変位させることで、運転者は窮屈感を得るため、障害物の存在を確実に知ることができる。また、座面を障害物が位置する方向に変位させることで、運転者は、着座面が動く方向に障害物があることを直感的に知ることができる。
【0019】
また、前記制御命令決定手段は、自車両と障害物との距離が所定の距離となった場合に前記着座面を動揺させる制御を行うことを特徴としてもよい。
【0020】
動揺とは、着座面の位置が変位したのちに動作前の位置に復帰することを指す。このように構成することにより、障害物までの距離が定められた値を下回った場合に着座面を動揺させることができるため、運転者は障害物に対する正確な距離を知ることができる。な
お、着座面の変位は、特定の方向に限定されるものではない。
【0021】
また、前記制御命令決定手段は、所定の時間ごとに前記着座面を動揺させる制御を行い、前記所定の時間は、車両と障害物との距離が近くなるに従って短くなることを特徴としてもよい。
【0022】
特定の周期で着座面を動かすことにより、障害物までの残された距離がどの程度あるのかを運転者に伝達することができる。たとえば、距離に余裕がある場合は1秒に1回着座面を動かし、余裕が無くなってきた場合は1秒に3回、停止すべき位置に達した場合は1秒に5回とすることによって、運転者は障害物までの距離を具体的に知ることができる。
【0023】
また、前記機構は、着座面の一部を垂直方向に変位させる複数の機構を含み、前記障害物検知手段は、自車両に対する障害物の方向をさらに取得し、前記制御命令決定手段が、前記取得した方向に対応する位置にある機構を駆動することを特徴としてもよい。
【0024】
座席に、垂直方向に座面を変位させる複数の駆動機構を内蔵し、車両から見て障害物が位置する方向を検知する手段をさらに設けることで、障害物が存在する方向に対応する駆動機構を駆動させることができる。これにより、例えば、車両右側方に障害物がある場合、着座面の右側に内蔵された駆動機構のみを駆動させることができ、右方に注意を向けなければならないことを運転者に伝達することができる。
【発明の効果】
【0025】
本発明によれば、車両の運転者に、障害物までの距離を直感的に伝えることができる障害物通知システムを提供することができる。
【図面の簡単な説明】
【0026】
【図1】本発明に係る障害物通知システムの機能構成図である。
【図2】車両に備えられたセンサの配置図である。
【図3】第一の実施形態に係る処理フローチャートである。
【図4】障害物検知部が取得した情報を表す図である。
【図5】第一の実施形態に係る駆動情報データの例である。
【図6】第一の実施形態に係る駆動情報データの他の例である。
【図7】第一の実施形態に係るアクチュエータの配置図である。
【図8】第一の実施形態の変形例に係る駆動情報データの例である。
【図9】第二の実施形態に係るアクチュエータの配置図である。
【図10】第二の実施形態に係る駆動情報データの例である。
【図11】第三の実施形態に係るアクチュエータの配置図である。
【図12】第三の実施形態に係る駆動情報データの例である。
【図13】第三の実施形態に係るアクチュエータ駆動例である。
【図14】第四の実施形態に係るアクチュエータの配置図である。
【図15】第四の実施形態に係る駆動アクチュエータ決定データである。
【発明を実施するための形態】
【0027】
(システムの構成)
第一の実施形態に係る障害物通知システムの概要について説明する。図1は、第一の実施形態に係る障害物通知システムの機能構成を示した図である。
【0028】
センサ11は、自車両と障害物との間の距離を検出するセンサである。センサ11は、たとえばミリ波レーダーや超音波レーダーなどによって構成され、障害物からの反射波に基づいて距離を検出する機能を有する。センサ11は、車両の前方および後方に設置され
た複数のセンサから構成されており、図2のような配置とすることができる。各センサは、検出した距離情報を障害物検知部12へ送信する。
【0029】
障害物検知部12は、取得した距離情報をもとに、障害物との距離および方向を決定する手段である。例えば、図2のセンサ配置において、センサ3のみに反応があった場合、右前方に障害物があることがわかる。また、センサ5のみに反応があった場合、後方にオートバイや軽車両などの小さな障害物があることが、センサ4〜6に反応があった場合、車両後方に他の車両もしくは大きな建造物などがあることがわかる。障害物検知部12は、取得した障害物との距離および方向についての情報を、通知部13と駆動部15へ送信する。障害物との距離および方向の決定方法については後述する。
【0030】
通知部13は、運転者に対して表示または音声によって障害物の存在を通知するための制御手段である。通知手段として、スピーカ14aまたは表示部14bが接続されており、障害物との距離または方向を、音声または画面表示などによって行う。通知部13、スピーカ14a、表示部14bについては、運転者に対して行う通知の補助的役割を担うものであり、通知部やスピーカ、表示部を設けることは必須ではない。
【0031】
駆動部15は、本発明における制御命令決定手段であり、座席に内蔵されたアクチュエータの駆動制御を行う手段である。駆動部15は、入力された、障害物との距離および方向についての情報から、アクチュエータを駆動する制御命令を決定する駆動情報データ15aを有している。詳細な制御命令の決定方法については後述する。
【0032】
なお、本システムは、CPU(中央演算処理装置)、主記憶装置、補助記憶装置などのハードウェア資源を備えたコンピュータにより構成することができる。また、障害物検知部12、通知部13、駆動部15については、エレクトリックコントロールユニット(ECU)などの車載コンピュータによって実現されることが望ましい。
【0033】
アクチュエータ16は、座席に設けられた、座面の位置を変位させる手段である。アクチュエータ16は、座席の座面下部に配置され、制御命令に従ってたとえば着座面を前後方向にスライドさせ(図7)、もしくは、座面を部分的に隆起および沈降させる(図11)機能を有している。アクチュエータ16は、ソレノイドを利用したリニアアクチュエータであることが好ましいが、油圧などを利用したものや、直動型以外のものであっても構わない。
【0034】
以下に、本発明に係る障害物通知システムの動作フローチャートである図3を参照しながら、各手段の動作について詳細に述べる。
【0035】
(第一の実施形態)
本発明に係る障害物通知システムが動作を開始すると、障害物検知部12が、センサ11から距離情報を取得する(S11)。車両に備えられたセンサが検知した全ての距離情報は、障害物検知部12が取得することができる。
【0036】
図4(a)および(b)は、障害物検知部12が取得した情報の内容例を表したものである。障害物検知部12は、これらの各センサから取得した距離情報のほか、図4(c)に例示したように、各センサが障害物を検出できる角度についての情報を有している。これらの情報によって、障害物検知部12は、障害物が車両に対してどこに位置しているかを算出することができる。なお、図4(c)における検出角は、車両正面を0度とし、右方を90度、背面を180度、左方を270度としている。
【0037】
例えば、図4(a)に示した例の場合、センサ6のみが500cmという数値を検出し
ているため、車両正面から135〜165度右の方向、5mの距離に障害物があると判定することができる。また、各センサには検出することができる角度(指向角)があるため、各センサからの情報と、図4(c)の情報を用いて補正を行ってもよい。たとえば、図4(b)に示した例の場合、センサ5、センサ6が共に500cmという数値を検出しているため、車両正面から165度右の方向、5mの距離に障害物があると判定してもよいし、車両背面5mの距離と、車両正面から150度右の方向、5mの距離にそれぞれ障害物があると判定してもよい。本実施形態では、6個のセンサを使用したが、センサの数が増えることによってより正確な障害物の位置判定が可能となる。
【0038】
障害物検知部12が取得した、障害物に対する距離と方向の情報、例えば「車両正面から150度右の方向、5mの距離に障害物」という情報は、駆動部15へ送られる。
【0039】
駆動部15は、まず、車両と障害物との距離を閾値と比較する(S12)。障害物検知部12が取得した全ての距離情報が閾値以上である場合、車両周辺に障害物は無いと判断し、処理は初期状態に戻る。このとき、アクチュエータが駆動中であった場合(S15)、当該アクチュエータを停止させ、座面を初期位置に戻す(S16)。運転者に障害物を通知する必要がないためである。なお、本願明細書にて述べている実施形態においては、当該距離の閾値をaとする。
【0040】
障害物との距離が閾値より小さかった場合、駆動部15は、記憶されている駆動情報データを取得する(S13)。そして、障害物検知部12が取得した情報と、当該駆動情報データから、アクチュエータの位置を決定し、アクチュエータが決定された位置に移動するよう制御命令を送信する(S14)。
【0041】
ここで、駆動情報データの例を示した図である図5を参照しながら、駆動情報データについて説明する。駆動情報データとは、たとえば、「障害物までの距離が、1m近づくごとに座面を一定の幅で振動させる」といったものや、「障害物に近づくほど座面の変位量を大きくする」といった、アクチュエータをどのように駆動するかといった手順を表す情報である。図5の例では、障害物までの距離をX軸に、座面の水平方向の変位量をY軸にとり、「障害物までの残り距離がaからbである場合において、距離に比例して座面をプラス方向(前方)に動かす」という動作を定義している。この定義、つまり障害物までの距離と、座面の変位量を対応づけたデータが、本実施形態における駆動情報データ15aの内容である。
【0042】
また、図6は、駆動情報データの別の例を示したものである。図6の例では、同様に障害物までの距離をX軸に、座面の水平方向の変位量をY軸にとり、「障害物までの残り距離がaからbである場合において、一定の距離を近づくごとに座面を動揺させ、距離に比例してその振動幅を大きくする」という動作を定義している。
【0043】
図7は、第一の実施形態に係る、アクチュエータの配置を表した図である。図7に示したアクチュエータ31が、図1のアクチュエータ16に対応する。アクチュエータ31は前後にスライドする座面機構に連結されて配置されており、座面を前後方向に変位させることができる。図5の内容に従って駆動した場合、障害物までの距離がaとなった地点で駆動部15はアクチュエータ31に対して制御命令を発行し、座面が前方向に動き始める。距離がbとなったら、アクチュエータ31は停止する。
【0044】
このように構成することにより、運転者は、障害物までの残り距離を触力覚によって知ることができる。座面が駆動を開始する位置と、駆動を終了する位置を定義することによって、車両が、障害物に対して注意を要する領域に入ったこと、および、停止すべき位置に達したことを容易に運転者に通知することができる。また、運転者は、座面が前方に移
動することによって窮屈感を得られるため、音声などによる通知と異なり、システムの動作に気づかないということがない。
【0045】
本実施形態においては、座面を車両の進行方向(前方)へスライドさせたが、他の方向へスライドさせても構わない。例えば、障害物が前方にある場合は座面を前方に、後方にある場合は座面を後方にスライドさせてもよい。また、前後後方に動くアクチュエータと、左右方向に動くアクチュエータを組み合わせ、障害物の方向に応じて動かす方向を決定してもよい。
【0046】
また、座面の移動は、単方向ではなく複数の方向を組み合わせても構わない。例えば、後退しながら車庫入れを行う場面において、後ろより壁面が近づいてきたら徐々に座面を後方向に移動させ、停止すべき位置に達した場合、一気に前方向に押し出すことにより、運転者に対して衝突する感覚を伝え、注意を喚起することができる。従来であれば、車庫入れにおいて、停止位置は車止めに車輪が当たる感覚でしか知ることができなかったが、このように構成することにより、車止めが無い駐車場はもとより、縦列駐車などにおいても確実に停止位置を知ることができる。
【0047】
また、駆動情報データ15aの定義方法については、例示した、値をX−Yの二次元グラフで保持する方法のほか、距離と変位量を対応付けられる方法であれば他の方法を用いても構わない。
【0048】
また、本実施形態の駆動情報データ15aは、障害物までの距離をX軸にとったが、例えば障害物に対する相対速度や相対加速度などを用いても構わない。障害物検知部12が、読み取った距離を時間で微分することによって、障害物に対する相対速度、相対加速度を算出し、駆動部15が、算出した値に応じてアクチュエータ31を駆動させることも可能である。
【0049】
なお、図3のフローチャートは、連続して繰り返し実行されてもよいし、障害物までの距離が変化した場合において繰り返し実行されてもよい。
【0050】
(第一の実施形態の変形例)
第一の実施形態においては、障害物までの距離に応じて座面の変位量を決定したが、本変形例では、さらに座面の移動速度を制御する。
【0051】
本変形例に係るアクチュエータの配置方法、システムの構成および処理フローの詳細については、第一の実施形態と同様である。
【0052】
図8(a)および(b)は、本実施形態における、駆動情報データ15aの内容を表した図である。第一の実施形態が、障害物までの距離に応じて座面の変位量を決定するのに対し、本変形例では、座面の移動速度に緩急をつけることで衝撃感を創出し、障害物までの残り距離を表現する。図8(a)は、座面の水平方向の移動速度と障害物との距離との関係を示した図であり、図8(b)は、座面の水平方向の変位量と障害物との距離との関係を示した図である。
【0053】
図8に示した内容に従ってアクチュエータを駆動した場合、駆動部15は、障害物までの距離が閾値であるaとなった地点でアクチュエータ31に対して制御命令を発行し、座面の移動を開始する。障害物までの距離があらかじめ定められた距離に達すると、座面の移動速度を図8(a)のように変化させる。これにより、座面の変位量は図8(b)のようになるため、移動速度が変化する丸印破線部分にて、運転者に衝撃感を与えることができる。あらかじめ定められた距離とは、たとえば残り距離が5m、4m、3mとなる地点
といったように一定間隔で設定することができる。
【0054】
このように駆動情報データ15aを定義することにより、障害物までの距離感覚を座面の変位によって表現するのと同時に、衝撃感を運転者に与えることで正確な残り距離を伝達することが可能になる。本変形例を第一の実施形態と比較すると、停止すべき位置までの距離が把握しやすいというさらなる利点がある。
【0055】
なお、本変形例においては、3段階の移動速度を用いて衝撃感を創出したが、運転者に衝撃感を与えることができれば他のパターンを使用してもよい。
【0056】
(第二の実施形態)
第一の実施形態においては、座面を前後方向に変位させるアクチュエータを使用したが、本実施形態では、座面を上下方向に変位させるアクチュエータを追加する。
【0057】
図9は、本実施形態に係るアクチュエータの配置を表した図である。本実施形態に係る座席は、座面を前後方向に変位させるためのアクチュエータ31に加え、座面を上下方向に変位させるためのアクチュエータ32を有している。アクチュエータ32は、上下方向に駆動し、座面の全体または一部を隆起または沈降させることができる。アクチュエータ31およびアクチュエータ32が、図1のアクチュエータ16に対応する。
【0058】
本実施形態におけるシステムの構成および処理フローの詳細については、第一の実施形態と同様である。
【0059】
図10は、本実施形態における、駆動情報データ15aの内容を表した図である。図10の内容に従ってアクチュエータを駆動した場合、駆動部15は、障害物までの距離が閾値であるaとなった地点でアクチュエータ31に対して制御命令を発行し、座面が前方向に動き始める。同時に、アクチュエータ32に対しても制御命令を発行し、座面を一瞬だけ隆起させ、元に戻す。距離がbとなったら、再度アクチュエータ32に対して制御命令を発行し、座面を隆起させ、元に戻す。距離がcとなったら、アクチュエータ31は停止する。
【0060】
このように、複数のアクチュエータを座席に内蔵し、水平方向の動きと垂直方向の動きを制御することにより、複数の情報を運転者に伝達することが可能になる。本実施形態では、距離の節目となる位置で、座面を垂直に隆起させることで、何かを乗り越える感覚を運転者に与え、障害物までの残り距離を伝えやすくしている。例えば、残り5m地点で一回目の隆起、残り1m地点で二回目の隆起、のように設定しておくことで、車両を停止させる目標位置を把握することが容易になる。
【0061】
また、このように構成することにより、具体的な数値を運転者に伝達することができるため、たとえば、前方500mに渋滞の最後尾がある場合、5回の振動を与え、100m進むごとに振動が一回ずつ減る、といった動作も可能である。この場合、センサ11には超音波センサのかわりに、渋滞情報を取得できる車載端末を用いてもよい。
【0062】
(第三の実施形態)
第三の実施形態においては、障害物が接近している場合において、一定の間隔で座面を変位させ、その間隔を変更することによって運転者に距離を伝達する。
【0063】
図11は、第三の実施形態に係るアクチュエータの配置を表した図である。本実施形態に係る座席は、座面を上下方向に変位させるためのアクチュエータ32のみを有している。
【0064】
本実施形態におけるシステムの構成および処理フローの詳細については、第一の実施形態と同様である。
【0065】
図12(a)および(b)は、本実施形態における、駆動情報データ15aの内容を表した図である。本実施形態では、座面を一瞬隆起させ、元に戻す動きを一つの動作パターンとし、障害物との距離が所定の距離以下である領域において、当該パターンを繰り返す。繰り返しの間には、一定の待機時間が挿入される。図12(a)は、前記動作パターンを表した図であり、図12(b)は、前記待機時間と障害物との距離との関係を示した図である。
【0066】
図12(a)および(b)の内容に従ってアクチュエータを駆動した場合、駆動部15は、障害物までの距離が閾値であるaとなった地点でアクチュエータ32に対して制御命令を発行し、待機時間t0で繰り返し座面を駆動する。障害物までの距離が小さくなるに従って、待機時間は徐々に短くなり、距離がbに達すると、待機時間はt1となり、ほぼ連続した振動となる。この動きを、経過時間をX軸に、垂直方向の変位をY軸にとって表現すると図13のようになる。
【0067】
このように、駆動情報データ15aを、駆動パターンと駆動間隔(待機時間)の二つで定義することにより、アクチュエータが振動する間隔で運転者に距離を伝達することが可能になる。第一の実施形態と比較すると、停止すべき位置までの距離感覚が把握しやすいという利点がある。
【0068】
本実施形態においては、アクチュエータ32の駆動パターンに上下振動を用いたが、アクチュエータ31と同様に前後運動をさせてもよい。また、本実施形態においては、アクチュエータ32の駆動パターンにのこぎり波を使用したが、三角波や矩形波を用いてもよい。
【0069】
(第四の実施形態)
第四の実施形態においては、座面に複数のアクチュエータを内蔵し、障害物の方向に応じて駆動させるアクチュエータを変更する。
【0070】
図14は、第四の実施形態に係るアクチュエータの配置を表した図である。本実施形態では、アクチュエータ21から27までの7個のアクチュエータが座面に内蔵されており、それぞれが上下方向に座面を変位させることができる。
【0071】
本実施形態にて用いる駆動部15は、他の実施形態に加え、駆動するアクチュエータを決定するためのデータをさらに有している。図15は、センサ番号とアクチュエータ番号の対応が定義されたデータであり、駆動部15は、このデータを用いて駆動するアクチュエータを決定する。データの読み込みは、図3のフローチャートにおけるステップS13にて行う。
【0072】
たとえば、図15の例において、センサ1のみに反応があった場合、アクチュエータ21が駆動の対象となる。また、センサ2のみに反応があった場合、アクチュエータ21および27が駆動の対象となる。センサ1と4に反応があった場合、アクチュエータ21,22,23の3つが駆動の対象となる。この判断は、フローチャートにおけるステップS14にて行われ、それぞれ該当するアクチュエータに制御命令が出力される。
【0073】
なお、本実施形態におけるシステムの構成および処理フローの詳細については、ステップS13およびS14を除いて第一の実施形態と同様である。また、アクチュエータの駆
動方法については、第二の実施形態で示した、障害物との距離が所定値となった場合に駆動する方法や、第三の実施形態で示した、障害物との距離に応じて駆動間隔を変更する方法などを使用することができる。
【0074】
また、本実施形態においては、上下方向に座面を変位するアクチュエータを複数配置したが、水平方向に座面を変位するアクチュエータを複数配置してもよい。たとえば、座面の左半分と右半分をそれぞれ前後に変位できるアクチュエータを使用し、障害物の方向と同じ方向のアクチュエータを駆動させてもよい。この場合、アクチュエータの駆動方法については、第一の実施形態で示した、障害物との距離に応じて変位幅を変更する方法などを使用することができる。
【0075】
このように構成することにより、運転者は、障害物がある方向を視覚および聴覚に頼ることなく直感的に知ることができる。
【0076】
上記の実施形態はあくまでも一例であって、本発明はその要旨を逸脱しない範囲内で適宜変更して実施しうるものである。たとえば、ミリ波レーダーや超音波レーダー以外に、車外カメラを用いて車両周辺の障害物を検出してもよいし、目的に応じてアクチュエータおよびセンサの数は増減させてもよい。
【0077】
また、運転者への通知を確実に行うため、アクチュエータ31および32の駆動と同時に、スピーカ14aから音声を出力し、あるいは表示部14bに障害物の方向や距離を表示してもよい。たとえば、路面に凹凸を設けて運転者に注意を喚起する道路舗装が知られているが、当該舗装を走行した場合のロードノイズを再現した音を、アクチュエータの動作と同期して鳴らしてもよい。
【0078】
また、例示した実施形態においては、一つのアクチュエータに一つの駆動情報データ15aを対応させたが、複数の駆動情報データ15aを記憶させ、自車の速度域ごとに使用するデータを切り替えるなどしても構わない。このように構成することで、たとえば高速で走行している場合は、安全のために警告を与える距離の閾値を大きくし、低速で移動している場合は、警告を与える距離の閾値を小さくするといったことが可能になる。
【0079】
また、駆動情報データ15aの選択は、速度以外によって行ってもよい。たとえば、運転者の視界にある前方のセンサに反応がある場合は、警告を与える距離の閾値を小さくとり、運転者が視認できない場所である後方のセンサのみに反応がある場合は、警告を与える距離の閾値を大きくとり、早めに警告を発してもよい。
【0080】
また、駆動情報データ15aについては、第一の実施形態では距離と座面変位量の関係を表すデータを例示し、第二の実施形態では時間と座面変位量、および距離と駆動間隔の関係を表すデータを例示したが、運転者に障害物までの距離および方向を伝達できる形式であれば、他の関係を用いても構わない。
【符号の説明】
【0081】
11 センサ
12 障害物検知部
13 通知部
14a スピーカ
14b 表示部
15 駆動部
15a 駆動情報データ
16 アクチュエータ
21〜27,31,32 アクチュエータ
【特許請求の範囲】
【請求項1】
車両が有する座席の着座面の位置を変位させる機構と、
自車両周辺の障害物と自車両との距離情報を取得する障害物検知手段と、
前記取得された距離情報から、前記機構の駆動方法を決定する制御命令決定手段と、
を有することを特徴とする、障害物通知システム。
【請求項2】
前記制御命令決定手段は、自車両と障害物との距離が近くなるに従って前記着座面の初期位置からの変位量が大きくなるよう制御を行う
ことを特徴とする、請求項1に記載の障害物通知システム。
【請求項3】
前記制御命令決定手段は、車両の進行方向に前記着座面を変位させる制御を行う
ことを特徴とする、請求項1または2に記載の障害物通知システム。
【請求項4】
前記制御命令決定手段は、障害物が位置する方向に前記着座面を変位させる制御を行う
ことを特徴とする、請求項1または2に記載の障害物通知システム。
【請求項5】
前記制御命令決定手段は、自車両と障害物との距離が所定の距離となった場合に前記着座面を動揺させる制御を行う
ことを特徴とする、請求項1ないし4のいずれかに記載の障害物通知システム。
【請求項6】
前記制御命令決定手段は、所定の時間ごとに前記着座面を動揺させる制御を行い、前記所定の時間は、車両と障害物との距離が近くなるに従って短くなる
ことを特徴とする、請求項1ないし5のいずれかに記載の障害物通知システム。
【請求項7】
前記機構は、着座面の一部を垂直方向に変位させる複数の機構を含み、
前記障害物検知手段は、自車両に対する障害物の方向をさらに取得し、
前記制御命令決定手段が、前記取得した方向に対応する位置にある機構を駆動する
ことを特徴とする、請求項1ないし6のいずれかに記載の障害物通知システム。
【請求項8】
車両が有する座席の着座面の位置を変位させる機構を駆動することによって、自車両周辺にある障害物の存在を車両の乗員に通知する障害物通知方法であって、
自車両周辺の障害物と自車両との距離情報を取得し、
前記取得された距離情報から、前記機構の駆動方法を決定し、前記機構を駆動する
ことを特徴とする、障害物通知方法。
【請求項1】
車両が有する座席の着座面の位置を変位させる機構と、
自車両周辺の障害物と自車両との距離情報を取得する障害物検知手段と、
前記取得された距離情報から、前記機構の駆動方法を決定する制御命令決定手段と、
を有することを特徴とする、障害物通知システム。
【請求項2】
前記制御命令決定手段は、自車両と障害物との距離が近くなるに従って前記着座面の初期位置からの変位量が大きくなるよう制御を行う
ことを特徴とする、請求項1に記載の障害物通知システム。
【請求項3】
前記制御命令決定手段は、車両の進行方向に前記着座面を変位させる制御を行う
ことを特徴とする、請求項1または2に記載の障害物通知システム。
【請求項4】
前記制御命令決定手段は、障害物が位置する方向に前記着座面を変位させる制御を行う
ことを特徴とする、請求項1または2に記載の障害物通知システム。
【請求項5】
前記制御命令決定手段は、自車両と障害物との距離が所定の距離となった場合に前記着座面を動揺させる制御を行う
ことを特徴とする、請求項1ないし4のいずれかに記載の障害物通知システム。
【請求項6】
前記制御命令決定手段は、所定の時間ごとに前記着座面を動揺させる制御を行い、前記所定の時間は、車両と障害物との距離が近くなるに従って短くなる
ことを特徴とする、請求項1ないし5のいずれかに記載の障害物通知システム。
【請求項7】
前記機構は、着座面の一部を垂直方向に変位させる複数の機構を含み、
前記障害物検知手段は、自車両に対する障害物の方向をさらに取得し、
前記制御命令決定手段が、前記取得した方向に対応する位置にある機構を駆動する
ことを特徴とする、請求項1ないし6のいずれかに記載の障害物通知システム。
【請求項8】
車両が有する座席の着座面の位置を変位させる機構を駆動することによって、自車両周辺にある障害物の存在を車両の乗員に通知する障害物通知方法であって、
自車両周辺の障害物と自車両との距離情報を取得し、
前記取得された距離情報から、前記機構の駆動方法を決定し、前記機構を駆動する
ことを特徴とする、障害物通知方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2013−86560(P2013−86560A)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願番号】特願2011−226189(P2011−226189)
【出願日】平成23年10月13日(2011.10.13)
【出願人】(502087460)株式会社トヨタIT開発センター (232)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願日】平成23年10月13日(2011.10.13)
【出願人】(502087460)株式会社トヨタIT開発センター (232)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]