
隠蔽された物体の検知
着衣の個人(22)が疑わしい隠蔽された物体(25)を携帯しているかどうかを決定するためのシステム、方法、デバイスおよび装置を開示する。この決定は、200MHz〜1THz範囲の電磁放射による検査を通じて個人(22)の画像に対応するデータを確立する工程を含む一つの形式では、反射された放射線の強度および反射する表面の深度差分に対応する画像データを受け取り処理して、疑わしい隠蔽された物体(25)を検知する。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は電磁放射走査/画像技術に関し、より詳細には、人が衣服の下に携帯する隠蔽された物体の検知に関するが、それに限定されない。
【0002】
武器、密輸品、および他の隠蔽された物体の検知は、検問所その他における重要な関心事である。ある手法は磁力計を利用して一定の金属性物体を検知する。残念なことに、この手法は、安全上の脅威をもたらす可能性のある火器、爆発物、および他の物品を製作するために用いることができる大部分の有機高分子および複合材料を検知しない。
【0003】
別の手法では、選ばれた波長範囲内の電磁放射を、衣服によって隠蔽された物体を暴くことができる画像を提供するために使用することができる。しかしながら、この手法は、通常、検査速度および/または画像解像度に関する制限に直面し、そのため、ある種の大量輸送交通機関の検問所などの一部の使用には不適切であるとされてきた。さらに、これらのシステムは、通常は衣類によって隠蔽することを意図している身体各部の詳細画像を提供することができるため、人間の検査官を利用することは、点検されている人に恥ずかしい思いをさせ、プライバシーの権利を侵害しているという懸念を生ずる可能性がある。したがって、この技術分野はさらなる貢献を現在必要としている。
【0004】
関連出願の相互参照
本出願は、2003年6月26日出願の米国特許出願第10/607,552号の一部継続出願であり、および2001年3月16日出願の米国特許出願第09/810,054号(現在、米国特許第6,507,309号)の継続出願である2002年11月21日出願の米国特許出願第10/301,552号(現在、米国特許第6,703,964号)の一部継続出願である。本出願は、共に2003年10月30日出願の米国特許出願第10/697,965号および10/697,848号に基づいて優先権を主張する。上記の特許および特許出願はそれぞれ、参照によりその全体を本明細書に組み入れられる。
【0005】
政府の権利
本発明は、契約番号DE-AC0676RLO1830の下に米国エネルギー省により与えられた国庫補助により為された。政府は本発明に一定の権利を有する。
【背景技術】
【0006】
概要
本発明の一つの実施態様は物体を検知する独自の技術である。他の実施態様は、人が物体を隠蔽しているかどうかを判断するための独自のシステム、デバイス、方法および装置を含む。
【0007】
本発明のさらなる実施態様は:人の衣類の下の表面から返ってきた約200メガヘルツ(MHz)〜約1テラヘルツ(THz)の範囲に1または複数の周波数を有する電磁放射を検知する工程、返された電磁放射から表面に沿った強度および深度に対応するデータを確立する工程、およびデータを適応的に処理し、人が疑わしい物体を携帯しているかどうかを決定する工程、を含む技術である。
【0008】
本発明の別の実施態様は:隠された物体を携帯する人を含む検査領域を照射する工程、照射に応じてその領域から返された電磁放射を検知する工程、検査領域に沿った、検査領域から返された電磁放射の強度のマップおよび深度のマップを表わすデータを確立する工程、ならびにデータをニューラルネットワークに入力して強度と深度のマップに基づいて隠蔽された物体を検知する工程、を含む技術を目標にする。
【0009】
さらに別の本発明の実施態様は、対象から返された電磁放射を検知するための技術を含み、ここで電磁放射は約200MHz〜約1THzの範囲に1または複数の周波数を含む。対象の1または複数の表面に沿った対象から返された電磁放射の強度および深度差分に対応するデータを確立する。データについて適応的な処理を行ない、密輸品または潜在的な安全上の脅威の少なくとも1つであると疑われた人工物体が存在するかどうかを強度および深度差分の関数として決定する。一つの形式では、検査している対象が人であって、人の衣服の下に隠匿されているかもしれない疑わしい物体を検知するために技術を用いる。いくつかの多ピクセル画像部分の各々を評価するニューラルネットワークにより適応的な処理を行なうことができる。ニューラルネットワークへの入力の第1のセットの各々は、1つずつの画像部分に対する画像ピクセルに対応して画像ピクセル強度を受け取り、ニューラルネットワークへの入力の第2のセットの各々は、1つずつの画像部分に対する画像ピクセルに対応して深度差分ピクセル入力を受け取る。
【0010】
本発明のさらなる実施態様は、約200MHz〜約1THzの範囲の1または複数の周波数の電磁放射で人を検査する操作可能なアレイ、および処理サブシステムを含む。このサブシステムはアレイに連結され、入力の第1のセットおよび入力の第2のセットを含むニューラルネットワークを規定するように作動する。入力の第1のセットは、検査される人の衣服の下の表面に沿った、返って来る電磁放射強度のマップに対応するデータを受け取る。入力の第2のセットは表面深度のマップに対応する他のデータを受け取る。ニューラルネットワークは、密輸品および潜在的な安全上の脅威の少なくとも1つであると疑われる1または複数の物体を人が隠蔽しているかどうかを評価し、1または複数の対応する出力を与える。この評価を強度マップおよび深度マップの関数として行なう。
【0011】
またさらなる実施態様は、約200MHz〜約1THzの範囲に1または複数の周波数を含む電磁放射から得られた人の画像に対応するデータを、1または複数のプロセッサによって解析することが可能なロジックを所持するデバイスを含む。このデータは、人に対して決定された電磁放射の強度のマップおよび深度のマップを表わす。1または複数の疑わしい性質の物体を人が隠蔽しているかどうかを電磁放射の強度マップおよび深度マップの関数として評価するようにロジックは、データを用いて適応的な処理を実行するように操作可能である。一つの形式では、デバイスはプロセッサが判読可能なメモリを含み、またロジックはメモリに記憶された多数の命令の形をしている。別の形式では、デバイスがコンピュータネットワークの1または複数の部分を含み、ロジックはこのネットワーク上の伝達ための1または複数の信号中にコードされている。
【0012】
本発明のさらなる実施態様は、電磁放射で人を走査し、人が物体を携帯しているかどうかを決定する技術を含む。この決定を、走査から得られた画像データの評価によってすることができ、これにはオペレータによる1または複数の対応する画像の点検を含んでもよい。一つの形式では、通常は公衆から隠される身体的特徴の画像化から生じるかもしれないプライバシー問題を最小限にするために、オペレータは、人の身長に沿って取得した人の1または複数の断面図を点検する。
【0013】
別の実施態様では、約200メガヘルツ(MHz)〜約1テラヘルツ(THz)の周波数範囲内の電磁放射を人に照射する。人の画像を表すデータが照射から確立され、対応する画像データが提供される。一つの形式では、照射をそれぞれが人の周りを回転する経路に従う1対のアレイにより行なう。この形式の一つの特殊な実施では、それぞれのアレイをそれぞれが人の周りに弯曲した1対の向き合ったパネルとして提供する。これらのパネルを検問所を供給するために用いることができ、個人のアクセスを制限する1または複数の他のデバイスと共に用いてもよい。
【0014】
さらに別の実施態様では、システムは、検査領域をその間に設定するために互いに離れて置かれた2つ以上のアレイを含む。アレイをこの領域のまわりを回転するように構成して、人または物体を約200MHz〜約1THzの範囲の1または複数の周波数の電磁放射により検査する。さらに、アレイによって提供される1または複数の検査信号から決定される画像に対応するデータを確立するよう操作可能な1または複数のプロセッサが含まれる。1または複数のプロセッサはこのデータの関数として出力を生成する。システムは、この出力に応答して、オペレータへセキュリティを脅かす物体の存在が疑われるかどうかの指示を供給するデバイスをさらに含む。
【0015】
本発明のさらに別の実施態様は:アレイの間に置かれた人の周りに各々が回転するように形づくられた2つ以上のアレイを用意する工程;アレイを操作して、約200MHz〜約1THzの範囲の1または複数の周波数の電磁放射により人の検査を行なう工程;および、検査から画像データを生成して、人が物体を隠蔽しているかどうかを検知する工程、を含む。
【0016】
本発明のさらなる実施態様は:2つ以上のアレイにより、その間に置かれた人の検査を行なうために約200MHz〜約1THzの範囲の1または複数の周波数の電磁放射を生成する工程;検査の間に人の周りの非直線状の経路に沿って少なくとも一つのアレイを動かす工程;および、検査から画像データを生成して、人が物体を隠蔽しているかどうかを検知する工程;を含む。
【0017】
本発明のさらなる実施態様は、約200MHz〜約1THzの範囲に1または複数の周波数を有する電磁放射により人の検査を行なう工程を含む。1または複数の人の断面画像を検査に基づいて生成し、これらの画像の少なくとも1つから、人がセキュリティを脅かす隠蔽された物体を携帯しているかどうかを決定する。
【0018】
従って、本発明の一つの目的は関心対象の物品を検知するための独自の技術を提供することである。
【0019】
別の目的は、関心対象の物体が隠蔽されているかどうかを判断するための独自のシステム、方法、デバイス、または装置を提供することである。
【0020】
本発明の他の目的、実施態様、形式、特徴、長所、局面および利点は、本明細書に含まれる詳細な説明および図面より明らかになるであろう。
【発明の開示】
【0021】
詳細な説明
本発明は様々な形に具体化することができるが、本発明の原則についての理解を促進する目的で、図面で示す実施態様についてここで言及し、それを記述するために特定の言語を用いることにする。しかし、それによって本発明の範囲を制限することを意図するものではないと理解されるであろう。本発明の関連分野の当業者が通常思いつくであろう、記載した実施態様の任意の変更およびさらなる修正、ならびに本明細書に記載する本発明の原理の任意のさらなる応用も予期されている。
【0022】
図1は、本発明の一つの実施態様のセキュリティ検査システム20を図示する。操作において、システム20は、生命のあるまたは生命のない物体を、200メガヘルツ(MHz)〜1テラヘルツ(THz)の周波数範囲の電磁放射で照射し、反射された電磁線を検知することにより、検査する。一般に、対応波長は数センチメートルから数マイクロメートルまでの範囲である。ある天然繊維および合成繊維は、多くの場合そのような周波数/波長に透明かまたは半透明であり、そのような材料の下に位置する表面の検出および/または画像化が可能である。検査の対象が服を着た個人である場合、衣服または外被によってカバーされない部分だけでなく、衣服または外被によってカバーされた人体の部分に関する画像情報も通常はシステム20により得ることができる。さらに、人が携帯する衣服の下の物体に関する画像情報を、システム20により、一般に武器および密輸品に用いられる金属および非金属の物体構成物について提供することができる。
【0023】
図1に図示するように、物体Bはシステム20による検査のために提供された人22の形をしている。人22は、符番24aおよび24bによってより具体的に指定された外被または衣服によって少なくとも部分的に覆われた、典型的な方式で描写されている。衣料品24aおよび24bが、ファントム画法で武器の形に示された物体25を隠蔽している。人22は、システム20の走査/照射門30に位置している。門30は、武器および/または密輸品を検知することが望まれる検問所に設置するために構成されている。門30はモーター34に接続されたプラットフォーム32を含む。プラットフォーム32は、人22またはシステム20による検査が望まれるような他の物体を支持するように配置する。モーター34は、プラットフォーム32を、人22がその上に位置している間に、回転軸Rの周りに選択的に回転させるために配列される。示した方向については、軸Rがほぼ垂直であり、また人22は軸Rおよびプラットフォーム32に対して一般に中央の位置に居る。一つの形式では、プラットフォーム32を、有機熱可塑性または熱硬化性ポリマーなどの、ときどき武器が隠される場合がある靴底の中または下を検査できる材料で構成することができる。
【0024】
門30はさらに複数素子の検知用アレイ36を含む。さらに図2の部分的上面図を参照して、さらにプラットフォーム32のアレイ36との関係を説明する。軸Rは、一般に図2の画面に垂直であり、十字により表わされている。モーター34がプラットフォーム32を軸Rの周りに回転させるとき、アレイ36が軸Rの周りの一般に円形の経路Pに外接する。円形の経路Pは、門30の検査領域に相当する半径Dの仮想の円筒Cに対応する。半径Dは軸Rからアレイ36までの距離である。一つの好ましい形式では、半径Dは約0.25m〜約3mである。より好ましい形式では、半径Dは約0.5m〜約1.5mであり、直径約1m〜3mに対応する。図1および2に示す矢印Aは、軸Rの周りのプラットフォーム32の選択的な回転を表わす。
【0025】
検知用アレイ36は多くの直線的に配置された素子38を含み、明確さを保つためにその少数だけを模式的に図示し、また符番により具体的に示してある。素子38はそれぞれ選択された帯域幅内の電磁放射を送り出しまたは受け取るように作動する。検知用アレイ36は処理サブシステム40に接続されている。サブシステム40は、アレイ36の素子38に接続された切替ツリー43を備えたトランシーバー42を含む。一つの形式では、アレイ36のプラットフォーム32に対する位置が、サブシステム40に接続された1台または複数台の位置エンコーダ(示さず)により決定される。他の形式では、1または複数の異なる位置追跡デバイスおよび/または位置決定追跡技術を用いることができる。
【0026】
トランシーバー42の制御下で、切替ツリー43により個々の素子38を選択的に駆動させることができる。素子38はそれぞれ送信または受信に専用である。素子38を、互いに背中合わせの関係に配置された一般に垂直な2列に配置する。1方の列を構成する素子38は送信専用であり、他方の列を構成する素子38は受信専用である。各列中の素子38の数は、約32〜約2000素子の範囲にあり、また軸Rに沿って約2〜2.5mの垂直距離に及ぶ;しかし、他の実施態様では、異なる垂直範囲および/または異なる数の素子を用いることができる。トランシーバー42は、一度に、送信列のただ一つの素子38で物体Bを照射し、かつ同時に受信列の1または複数の素子38で受け取るように、切替ツリー43を制御することができる。トランシーバー42は、送信列の各素子38および対応する受信列の1または複数の素子38の連続した駆動を指令するロジックを有し、アレイ36による垂直方向に沿った人22の部分の走査を行う。対応する「ダウンレンジ」あるいは「経過時間」情報を、検査中の人22の対応する部分に関する位置データを提供するために用いることができる。そのような配置に関するさらなる情報が、同一出願人所有の米国特許第5,859,609号(参照により本明細書に組み入れられる)の中で、提供される。
【0027】
好ましい実施態様では、トランシーバー42およびアレイ36の素子38は、約1ギガヘルツ〜約1テラヘルツ(約1GHz〜約1THz)の範囲(これは自由空間の約0.3メータ(m)〜約300マイクロメータ(μm)の電磁放射波長範囲に対応する)から選ばれた電磁放射を送信および/または受信するために適切な形式である。別の好ましい実施態様では、インパルス幅に依存して約200MHz〜約15GHzの範囲(これは自由空間の約1.5m〜約0.02mの電磁放射波長範囲に対応する)の周波数を生成するインパルス・トランシーバー配列を利用する。より好ましい実施態様では、周波数範囲は約1GHz〜約300GHzであり、自由空間の約0.3m〜約1ミリメータ(mm)の波長領域に対応する。最も好ましい実施態様では、周波数範囲は約5GHz〜約110GHzであり、約0.06m〜約2.7mmの対応する自由空間の波長領域を有する。
【0028】
キャリブレーションを単純化するために、送信列の所与の素子38のための送信経路を、対応する受信列の素子38の送信経路とほぼ同じ長さとするように選択することができる。それにもかかわらず、他の実施態様では、送信/受信編成が異なることが可能である。例えば、一つの他の実施態様では、1または複数の素子38を送信と受信の両方に用いる。別の代替的実施態様では、両方の手法を混合したものを利用する。通常は、アレイ36から受け取った信号は、標準技術を適用して周波数をシフトダウンし、処理可能な様式に変換する。一つの形式では、トランシーバー42が、米国特許第5,859,609号(参照により本明細書に組み入れられる)に記述されたようなバイスタティックヘテロダイン周波数変調連続波(FM/CW)型である。同一出願人所有の米国特許第5,557,283号および第5,455,590号(それぞれ参照により本明細書に組み入れられる)が、他のトランシーバー編成のいくつかの例を提供する、しかしこれらに限定されない。さらに他の実施態様においては、重複するまたは重複しない周波数範囲の種々のトランシーバー/検知素子構成を混合したものを利用することができ、それには1または複数のインパルス型、モノスタティックホモダイン型、バイスタティックヘテロダイン型、および/または当業者が思い浮かべるであろう他の型が含まれる。
【0029】
トランシーバー42は、アレイ信号に対応するデータをサブシステム40の1または複数のプロセッサ44へ提供する。プロセッサ44を、トランシーバー42から受け取ったデータの処理に適切な、ディジタル回路、アナログ回路または両方の組合せを含む任意の型の1または複数の構成要素でそれぞれ構成することができる。プロセッサ44はプログラム可能型;専用のハードウェアに組み込まれた状態の機械;あるいはこれらの組合せであってよい。複数プロセッサ形式では;分散処理、パイプライン処理および/または並行処理を必要に応じて利用することができる。
【0030】
メモリ46がプロセッサ44と共に含まれる。メモリ46は、固体形式、電磁気形式、光学形式またはこれらの形式の組合せであってよい。更に、メモリ46は揮発性、不揮発性、あるいはこれらの型の混合であり得る。メモリ46の少なくとも一部はプロセッサ44に組み入れることができる。着脱可能な記憶デバイス(R.M.D.)48もプロセッサ44に含まれる。R.M.D.48は、フロッピーディスク、カートリッジ、テープ型の取外し可能な電磁気的記録媒体;CDまたはDVD型などの光ディスク;電気的に再プログラム可能な固体型の不揮発性メモリ、および/または、当業者が思い浮かべるであろう様々な種類でありうる。さらに他の実施態様では、R.M.D.48は存在しない。
【0031】
サブシステム40を、プラットフォーム32の回転をプロセッサ44および/またはトランシーバー42によって選択的に制御するために、モーター34に連結する。サブシステム40を、1または複数のオペレータ入力デバイス52および1または複数の表示デバイス54をさらに含む監視/制御ステーション50に収容する。オペレータ入力デバイス50にはキーボード、マウスまたは他のポインティングデバイス、音声認識入力サブシステム、および/または、当業者が思い浮かべる種々のデバイスが含まれ得る。オペレータ表示デバイス52は、ブラウン管(CRT)型、液晶ディスプレイ(LCD)型、プラズマ型、有機発光ダイオード(OLED)型、または当業者が思い浮かべるような他の型であり得る。ステーション50を、本明細書に以下にさらに記載するようにシステム20の操作に責任を負う1または複数の検問所オペレータによりコントロールされるように編成する。
【0032】
システム20は、通信リンク62によりサブシステム40につながれた通信サブシステム60をさらに含む。サブシステム60は、コンピュータネットワーク70に接続されたネットワークサーバー63を含む。コンピュータネットワーク70を私用型かまたはインターネットなどの公的にアクセス可能な型のいずれかのローカルエリアネットワーク(LAN)、都市域ネットワーク(MAN)、および/または広域ネットワーク(WAN)の形で提供することができる。リンク62はそのようなネットワークにより提供されるかまたは専用の通信チャネルの種類であり得る。サーバー63は、サブシステム40から遠くに設置することができる。実際、一つの実施態様では、サーバー63を、対応する門30を有する、多くの遠くに設置されたサブシステム40に接続する。また他の実施態様では、2以上のサーバー63を、共通の門30およびサブシステム40の編成に接続することができる。あるいはまたは加えて、サーバー63はサブシステム40に組み込まれた一部であってもよい。さらに他の実施態様では、サーバー63、ネットワーク70、およびサイト80は存在しない。実際、R.M.D.48を、サブシステム40と他の計算/処理デバイス間のデータ転送のために、代わりにまたは追加して使用することができる。
【0033】
サーバー63はネットワーク70を通じて通信するように操作可能である。コンピュータネットワーク70が、通信により多くのサイト80を互いに連結する。サイト80はそれぞれ、コンピュータネットワーク70と通信できるように接続して配置されたコンピュータ82を有する。各コンピュータ82は、1または複数のオペレータ入力デバイス50および、サブシステム40用に以前に記述したような1または複数のオペレータ出力デバイス52(明確さを保つために示さない)を含む。各サイト80のデバイス50および52が、オペレータ入力および出力(I/O)機能を選択的に提供する。コンピュータ82は、別のサブシステム40、パーソナルコンピュータまたはコンピュータ・ワークステーション、別のコンピュータサーバー、個人用携帯情報端末(PDA)、および/または当業者が思い浮かべることのできる種々の構成の形にすることができる。明確さを保つためにサイト80の2つのみを図示したが、コンピュータネットワーク70を介してより多くまたはより少しと連結することができることを理解するべきである。
【0034】
サーバー63、コンピュータネットワーク70およびサイト80がまとまって、ステーション50と遠隔通信する装置を提供する。これらの構成部分の相互接続は、有線、無線、または両方の組合せであってよい。ネットワーク70の代わりにまたはそれに加えて、サイト80およびサーバー63の1または複数を専用配線その他により連結することができる。ネットワーク70を通じた通信を、ステーション50の性能を監視し、サブシステム40に関連するソフトウェアを更新し、ステーション50または門30を遠隔操作し、および/またはより十分に以下に述べるように疑わしい物体の認識に関するデータをシステム20と共有するために用いることができる。そのような編成の1つでは、1または複数のサイト80を、システム20によるセキュリティ検査に関するデータの保存場所として構成する。
【0035】
図3のフローチャートをさらに参照して、操作システム20の一つのモードをプロシージャ120として説明する。プロシージャ120をシステム20により遂行して、物体25を携帯する人22を表す画像情報を提供する。プロシージャ120は操作121から始まる。操作121では、人22が、検問所の門30に入り、武器、密輸品および/または他の品目/物品を審査される。プロシージャ120は、検査インデックス「I」を1にセットする(I=1)初期化操作122に続く。操作122から、プロシージャ120が検査ルーチン130で始まる検査ループ124に入る。検査ルーチン130が、人22がプラットフォーム32上で回転するときに、アレイ36の視野内の人22の一部分を検査する。インデックスIは、プロシージャ120の一部として行なわれる種々の検査ルーチン130の数に対する整数インデックスである。
【0036】
図4を参照して、さらに検査ルーチン130を説明する。ルーチン130は、送信インデックスNを1にセットする(N=1)初期化操作132から始まる。操作132から、送信/受信操作136に始まり素子を順番付けるループ134に入る。インデックスNは、ルーチン130で行なわれた送信/受信操作136の数に対する整数インデックスである。操作136では、アレイ36の送信素子第「N」番の視野に入っている人22の一部分を電磁放射により照射し、1または複数の対応する受信素子が送信に反応して反射された電磁放射を集める。送信および受信素子は、前に述べたように切替ツリー43を備えたトランシーバー42のロジックにより選択される。操作136から、ルーチン130が条件文138に進む。これは、送信素子第「N」番が送信しなければならない最後の素子かどうか(N=LAST?)テストする;ここでLASTは、トランシーバー42によって作動される送信素子の総数である。
【0037】
一つの形式では、ルーチン130のそれぞれの実行のために、送信素子「N」が選択された周波数範囲を2度掃引し、2度の掃引のそれぞれに対応する後方散乱情報を異なる受信素子で受取る。送信素子を受信素子に対して少しずつずらして配列して、送信素子Nの位置がアレイの共通軸に沿った2つの受信素子間の点に合致するようにすることができる。米国特許第5,557,283号(参照により組み入れられる)が、送信および受信素子のこの配置の例について記載している。他の形式では、より多くのまたはより少ない掃引、種々の型の掃引、および/または種々の送/受信方向および数、を含む異なる技術を利用することができる。
【0038】
条件文138のテストが否定(N<LAST)である場合、次にインクリメント操作142を実行して、Nを1だけインクリメントする(N=N+1)。ループ134は、操作142から新しくインクリメントされたNの値に対応する素子38の送/受信サブセットを実行する送/受信操作136に操作142から戻る。このようにして、素子38をトランシーバー42によりアレイ36に沿った垂直経路で作動させて、人22の隣接する領域に沿ってデータを提供する。
【0039】
トランシーバー42により得られる検査情報の解像度を、各操作136の間に選択された極めて広い周波数範囲に及んで直線的に掃引することにより、向上させることができる。一つの好ましい形式では、トランシーバー42が、各操作136の実行について、少なくとも10GHzの範囲に及んで掃引する。この掃引は、例えば約10GHz〜約20GHzの範囲に及ぶ場合がある。より好ましい形式では、トランシーバー42および素子38を16GHzの掃引範囲に設定する。この掃引は、例えば約24GHz〜約40GHzの範囲で起こる場合がある。一つの最も好ましい形式では、距離分解能が一般に方位分解能と同じになるような極めて広い掃引範囲を選択する。これらの形式では、素子38を、傾斜溝またはエンドファイアアンテナ型を含み、それらに限定されない、選択された掃引範囲にふさわしい周波数応答を有する型となるよう選択する。別の形式では、送信素子は、所与の周波数範囲(10GHz〜20GHzなど)を、ある場合に周波数ホッピングとして知られている---擬似ランダム順序で掃引することができる。
【0040】
ループ134は、トランシーバー42の制御下で、アレイ36の所望の送信/受信素子38を順番に辿り、LAST回数だけ繰り返される。条件文138のテストが真である場合、肯定の分岐はデータ操作144に進む。操作136を実行した結果得られるデータは、トランシーバー42により、プロセッサ44に提供される。データ操作144では、操作136をN=1からN=LASTまで繰り返して実行することを通じて集められた情報について検査データセットを確立する。このデータセットは、整数インデックスIの現在値、およびこれらの実行の間に照射された部分に対応する。最初は、検査データセットはトランシーバー42、プロセッサ44または両方により蓄積され組織化されることが可能である;そしてその後、プロシージャ120の残りの部分に関連して記述したようにプロセッサ44によりさらに処理されるために、メモリ46に記憶される。操作144から、ルーチン130はプロシージャ120の次の段階に戻る。
【0041】
図3に返って参照し、プロシージャ120は、インデックスIの最終値に達したかどうか(I=TOTAL?)をテストする条件文152へと続く;ここでTOTALは、プロシージャ120に対して望まれるループ124(およびルーチン130)の実行の総数である。条件文152のテストが否定の場合(I<TOTAL)は、プロシージャ120は、インデックスIを1だけインクリメントする(I=I+1)インクリメント操作154を続ける。ループ124はその後、IがインクリメントされてTOTALと等しくなるまで、次の実行のためにルーチン130に返る。
【0042】
TOTAL回数だけループ124が実行されると、TOTALの数の検査データセットがメモリ46に記憶される。条件文152のテストが真の場合、プロシージャ120は円筒状区分化の操作160に移る。操作160では、検査データセットをプロセッサ44で処理し、それぞれが円筒Cの円弧区分に対応する多くの円筒状の画像データセットを生成する。図2を参照して、円弧区分S1は、人22に対して約90度の視角Vを張る。円弧区分S1が、軸Rに沿って伸びる円筒状の開口部CAを定義する。円弧区分S1に対応する画像データセットが、あたかも円筒状の開口部CAを通して見るかのように、選択された電磁放射を反射する物体Bの三次元の表面を表わす。一つの便利な形式では、これは任意の三次元の座標系を用いることもできるのであるが、円柱座標によって画像データセットを定義する。各画像データセットは、対応する円弧区分について集められた検査データからプロセッサ44により決定される。円筒状のイメージデータの決定に関するさらなる記述については、同一出願人が所有する米国特許第5,859,609号(参照により本明細書に組み入れられる)が参照される。
【0043】
操作160の間に、軸Rの回りの多数の円弧区分(あわせて人22の回りを囲む)に対して、円筒状の画像データセットを決定する。図5に、重複する8個の円弧区分、S1、S2、S3、S4、S5、S6、S7、およびS8(まとめて区分S)を、一般に円形の経路Pおよび対応する円筒Cに関連させて図示する。明確さを保つために、区分S1、S3、S5およびS7を、双頭の矢印によって経路Pのわずかに外側に模式的に表わし、また区分S2、S4、S6およびS8を、双頭の矢印によって経路Pのわずかに内側に模式的に表わす。図5では、区分Sは各々約90度の視角に対応し、また各1つが他の2つに約45度重複する。異なる区分Sがそれぞれ、人22の異なる部分の表現に対応することを理解するべきである。他の実施態様では、視角が異なることが可能であり、および/または一つの円弧区分Sとその次の区分が同一でなくてもよい。あるいはまたは加えて、重複は断続的でもよく、または存在しなくてもよい。
【0044】
プロシージャ120はマッピング操作162へと続く。操作162において、プロセッサ44が、周りの円弧区分Sに対して得られた画像データを、物体Bの共通表面へマッピングし、これが、次に物体Bの共通体積を定義する。操作162は、ある区分Sの与えられた位置に対するデータ点であって、別の円弧区分Sに対する同じ位置のデータ点から閾値量だけ異なるデータ点の照合調整を含み得る。一つの実施態様では、平均化技術を用いて中間データ点を内挿する。別の実施態様では、対応する円弧区分Sの中点からのデータ点の距離の増加につれて、そのデータ点の寄与を次第に減少させる重み関数を利用する。円筒形のデータセットを、好ましくは、画像中の不適切な位相干渉を減少させるために、ばらばらに(大きさを計算した後)組み合わせる。操作162が、ルーチン130の検査に用いられた電磁放射を反射する物体Bの地形図的表現および軸Rの回りの表面によって境界付けられる体積を提供する。
【0045】
プロシージャ120は操作164に進む。操作164では、1または複数の画像データセットがプロセッサ44により、操作162によって提供される物体Bの地形図的表現から決定される。これらの二次元画像データセットは、所望の視角から二次元平行電磁線投射を行なうことにより、物体Bに対する体積表現データから生成される。各平行電磁線は、それが出会う体積表現中のデータに比例して強度が減弱される。減弱後に、対応する電磁線に対して画像ピクセル強度を表わすための最大ボクセル強度を選択する。表現の裏面が描画に寄与しないように、減衰率を調節する。一般に結果はそれぞれの選択された視角に対する画像ピクセル強度の二次元マップである。強度マッピングに加えて、検査対象の他の特性をマップすることができる。例えば、検査アレイ36から対象の選択された領域までの距離を、特有の画像マップを生成するために用いることができる。一つの実施においては、距離を、指定された参照位置に関する検査対象の反射表面の相対深度マップを生成するために用いることができる。具体的には、距離(深度)を、送信と返された電磁エネルギーの検知の間の時間的遅れの差から決定することができる。一つの特定の形式では、「ピクセル化された」深度の画像マップが、強度に基づいた画像マップ用の最大強度ピクセル位置と同じ参照位置に関するそのような距離情報(「深度ピクセル」)から与えられる。この実施例を、さらに図6のルーチン170aに関連して以下に考察する。
【0046】
二次元画像(マップ)データセットをそれぞれ、対応する画像をデバイス52により必要に応じて表示するために用いることができる。一つの実施態様では、種々の視角からの多数の二次元画像を、操作164の体積表現から与える。これらの画像を、物体Bの動画を提供するために選ばれた順序で提示することができる。一つの形式では、一連の約32〜約64の普通は等間隔に置かれた軸Rの回りの画面を、物体Bの軸Rの回りに回転する動画を生成するために用いる。他の実施態様では、1または複数の二次元画像/マップを表示するデータを、中間で地形図的表現を形成することなく、決定することができる。対象を走査するために平面形状アレイを利用するシステムが、例えば図14および15に関連して以下に述べるシステムなどが、二次元画像/マップデータの直接生成に、特に適している。さらに他の実施態様では、画像表示を、概略的に登録して単に部分的に示してもよいし、および/または疑わしい物体の検知に応じて次に完全に記述する。
【0047】
操作164から、プロシージャ120は物体検知操作170を引き続いて実行する。操作170では、人が安全上の脅威となるものなど1または複数の関心対象の物体を携帯しているかどうかを決定する。これらの物体は人22の衣服により完全にまたは部分的に隠蔽されている可能性がある。一つの形式では、操作164で描写された1または複数の画像の点検によって決定が最初に行なわれる。あるいはまたは追加して、画像データの数値処理を、人22が図1に示した隠蔽された物体25などの1または複数の疑わしい物体を携帯しているかどうかを判断するために行なう。そのような数値的な技術の例について(それには限定されないが)、さらに図6〜10に関連して以下に記述する。操作170の後に、条件文195が、疑わしい物体が表示されたかどうかをテストする。条件文195のテストが否定(偽)の場合、プロシージャ120は停止する。条件文195のテストが肯定(真)の場合、プロシージャ120は操作200へ移る。操作200では、疑わしい物体の存在をオペレータに伝達する。
【0048】
この伝達は、操作164で生成された疑わしい物体に関連したいくつかまたはすべての対象の画像を表示することを含むことができる。オペレータの注意を、点検をうけている人および/または対応する画像に集中するために、視覚的および/または聴覚的警戒信号を、操作200において生成することができる。任意で、疑わしい画像の特徴を、識別する色、明滅/点滅または他の強度変化等の視覚的な特徴によって強調することができる。この表示に基づいて、オペレータは、さらなる点検が正当であるかどうか、危険人物などとして人22を拘留するべきかどうかを決定することができる。追加してまたは代わりに、オペレータの考察のためにテキストまたは図形中に物体の分類および検知に関係する情報を表示することができる。別の選択枝として、人および/または疑わしい画像領域の種々の画面を同時に表示することができる。さらなる変形では、オペレータが入力デバイス52を用いて、種々の画面の間を切り替えることができ、および/またはズームイン、またはズームアウトして表示されている画像の相対的なサイズを変更することができる。さらに他の実施態様では、検知基準を望むように改良するために擬似アラームを用いることができる。
【0049】
プライバシー異議が唱えられる可能性がある身体特徴を隠す/隠蔽するために、人の身体を、シルエット、マネキン、ワイヤフレーム体、その他の性的に中立な表現などの模式的身体画像として、および/または人の可視光範囲写真またはビデオ表現として表示することができる。そのような身体表現においては、これに対して置かれた任意の疑わしい物体のオーバーレイをオペレータが視認するために表示することができる。代わりにまたは追加して、疑わしい物体が携帯されている可能性があるかどうかを少なくとも部分的に評価するために人22の身長に沿って得られた断面画像を点検することにより、プライバシー問題に対応することができる。断面画像化を行う一つの方法が、さらに米国特許第6,507,309号(参照により本明細書に組み入れられる)に記載されており、それは代わりに、断面に切られた領域についての大きさの情報、例えば周長などを収集することを目標にしている。断面図の他の創造的局面を、図13に関連して以下に図示する実験例に関連してさらに記述する。
【0050】
さらにプライバシー異議が出る可能性のあるオペレータの点検画像量を減少させるために、操作170中の数値的処理方法を用いて、どの画像をオペレータに提示すればよいかを -- 具体的にはそのような処理により疑わしい物体の存在が示された画像のみを --最初に識別することができる。したがって、オペレータは、武器または密輸品などの1または複数の関心対象の物体を表示していると指摘された画像のみを検討し、プライバシーの懸念が、完全に除去することはできないにせよ、少なくとも合理的に減少される。さらに他の実施態様では、衣服の下の身体画像の表示は、条件付きでまたは無条件に許容できるか、または全く存在しない可能性がある。代わりにまたは追加して、サブシステム40によって集められた情報を、コンピュータネットワーク64を介して1または複数の遠隔サイト80へ送る。サイト80が、プロセッサ44の代わりに、プロシージャ120のデータ処理のうちの幾つかまたは全てを行なうことができる。一つのプロセスでは、門30が非侵襲的に服を着ている個人を走査し、画像情報を、サーバー63およびネットワーク70を介して指定のコンピュータ82へ送る。代わりにまたは追加して、サーバー63およびネットワーク70によって関心対象の物体を携帯している人に関する経歴情報にアクセスすることができる。
【0051】
操作200の実行後、プロシージャ120が終了する。さらに、条件文195が否定の場合、プロシージャ120は操作200を迂回して終了する。プロシージャ120は、所与の検問所を通り抜ける各人のために繰り返すことができ、および/または結果が曖昧に見える場合は、所定の人のために複数回繰り返すことができることを理解するべきである。
【0052】
数値的処理ルーチン170aおよび170bについて、さらに図6〜10に関連して記述する。ルーチン170aおよび/または170bを、プロシージャ120と同じ様式で、またはそれの一部分として、システム20により実行することができる。特にルーチン170aに関して、強度および深度を人間の対象が携帯している人工物体を識別するために用いることができることが発見された。一般に、武器または密輸品として用いられる型の人工物体は平らな面と鋭いエッジを持っていることが多く、通常はより滑らかで湾曲した人間対象の表面とは、200MHz〜1THzの範囲に1または複数の周波数を有する反射された/返された電磁エネルギーにより提供される強度および深度マッピングに基づいて区別することができる。ルーチン170aはこの発見を実行する一つの実施態様である。
【0053】
ルーチン170aでは、任意の他の検知方法の代わりにまたは追加して、操作170において画像データの数値処理を行い、人22の衣服の下に携帯されている武器および/または密輸品など -- 1または複数の疑わしい物体が存在するかどうかを決定する。図6を参照して、ルーチン170aをフローチャートの形で示す。ルーチン170aは、操作172aで画像カウンタFを1に設定すること(F=1)により始まる。カウンタFが、ルーチン170aでの処理のために、操作162から得られる隣接した画像にインデックスを付ける。最初、ルーチン170aは、以前にプロシージャ120の操作164に関連して記述した型の2つの異なる二次元画像データマップを生成する。これらは:(a)最大ピクセル強度に基づいた地形図的表現から導かれる二次元マップ(強度マップ)、および(b)距離情報から決定される反射表面の相対深度に基づいた二次元マップ(深度マップ)、である。
【0054】
各画像マップFに対して、ルーチン170aが、カウンタKによりインデックスを付けられたカーネル操作においてそれぞれ別々に評価される多くのより小さな画像部分を選択する。各画像マップカーネルKがそれぞれ、強度マップおよび深度マップから得られる一群の画像ピクセルに対応する。画像ピクセルのこの群は2枚のマップの各々において同じ相対的位置を有する。操作174aで、カーネルインデックスカウンタKを1にセットする(K=1)。操作174aから、ルーチン170aが操作176aに進む。操作176aでは、現在の画像FのカーネルKを処理のために選ぶ。
【0055】
操作176aから、ルーチン170aは操作178aへと続く。操作178aでは、カーネルKの深度マップに差分演算子を適用して、対応する深度差分マップを提供する。具体的には、この差分演算子が、差分演算を用いることにより二次元深度マップの微分を近似する。他の形式では、微分演算子を同様に利用することができよう。本明細書で用いる、マップまたは画像に対する「深度差分」とは、深度マップに適用された連続的微分演算および/または離散的差分演算の結果を指すものである。従って、深度の関数として行なわれる演算は、より特殊な深度差分の関数として行なわれる演算を包含している(しかしこれに限定されない)と理解すべきである。
【0056】
操作178aから、ルーチン170aは操作180aに進む。操作180aでは、カーネルKの強度マップおよびカーネルKの深度差分マップからの入力が、適応的な処理用のニューラルネットワークの対応する入力に供給される。一つの形式では、抽出された特徴を、ニューラルネットワークの多層パーセプトロン形式中に入力する。ネットワークが、エラーアルゴリズムの逆伝播などの繰り返しの訓練過程により、物体識別用に構成される。さらに他の実施態様では、異なる型のニューラルネットワークおよび/または訓練技術を追加してまたは代わりに利用することができる。またさらなる実施態様では、ファジイ論理、オペレータが支援するエキスパート学習システム等の異なる型の適応処理技術を、ニューラルネットワークに追加してまたは代わりに利用することができる。さらに非適応的処理を、代わりにまたは追加して利用することができる。さらに、いくらかのまたはすべての所望の深度差分情報を、直接の深度変化マップ情報の入力に基づいて、操作178aの代わりに元来操作180aが処理することができること、および/または深度に依存する異なる関数を、当業者に既知の技術を用いてニューラルネットワークに入力することができること、を認識するべきである。代わりにまたは追加して、強度画像情報に依存する異なる関数をニューラルネットワークへ、いくつかのまたはすべての直接の強度マップ情報の代わりに、当業者に既知の技術を用いて入力することができる。
【0057】
一つの特定の形式では、7×7ピクセルのカーネルサイズを、深度および強度データの両方のために利用する。この配列については、これまで利用されてきたパーセプトロンニューラルネットワークの一つの形式は、98の入力(2つの入力源のそれぞれからの7×7=49ピクセル、総計49×2=98の入力を供給する)を有する4層を含んでいた。このネットワークは、最初の隠された層に140のニューロンを、第2の隠された層に25のニューロンを、また2つの出力を含んでいた。これらの出力は:(1)人工物体として識別可能な、および(2)人工物体として識別不可能な、クラスを表わす。「人間」の属性の識別に対応するクラスなどの、他のクラスを含むことができるであろう。実施した実験において、ニューラルネットワークが、強度および深度差分をマップする49ピクセルの領域を両方とも同時に検査して、人工物体がカーネルウィンドウ内にあったかどうか決定した。処理する各カーネルKについては、操作181aにおいて出力を閾値と比較し、個別の結果を提供する。この閾値を、誤警報率、検知率等に基づいて手動でおよび/または動的に調節することができる。
【0058】
操作180aから、ルーチン170aは、カーネルKが解析を必要とする所与の画像の最後(FINAL)のカーネルかどうかをテストする条件文182aに進む。NOであれば、条件文182aからの否定(偽)分岐は操作部183aに進み、Kをインクリメントする(K=K+1)。操作183aから、ルーチン170aが、ループ184aによって操作176aに戻り、画像Fから得た次の強度カーネルKおよび深度カーネルKを処理する。ループ184aの各実行に対して、カーネルKが異なるピクセル群に変わる;しかしながら、1または複数のピクセルが2以上のカーネルKに含まれていて、ある程度の重複があってもよい。他の実施態様では、一つのカーネルKから次のカーネルKへ1または複数のピクセルをスキップしてもよい。さらに他の実施態様では、カーネルKのピクセル構成がニューラルネットワーク出力の性質に依存してもよい。一つの特定の実施例において、疑わしい物体が適応的な処理により表示された場合、および/または、選択したカーネル処理を再構成して、そのような物体を表示している任意のピクセルの近くの以前にスキップしたピクセルを処理する場合は、カーネルK間の重複の程度を増加させる。
【0059】
2つのマップの種々のカーネルKがニューラルネットワークによりループ184a中で処理されるため、操作181aにおいて、閾値出力結果が蓄積され、対応する適応的に処理された画像マップを検知された何らかの疑わしい人工物体の個別の表示と共に供給する。この画像マップは各カーネルKの出力に対応しており、したがって画像マップはカーネルを定義するために用いられる技術に依存する解像度を有している可能性がある。さらに、ループ184aが一度に一つのカーネルKを処理する一方で、他の実施態様では2以上のカーネルを平行して処理することができること、および/または、種々のカーネルサイズまたは構成を用いることもできることを理解するべきである。もし条件文182aのテストが、画像Fについて最終のカーネルKが処理されたことを示す場合は、次に条件文182からの肯定(真)分岐は、操作187aに進む。
【0060】
操作187aでは、1または複数のフィルタを適用して、誤警報および/または誤否定を、ループ184a中の種々のカーネルKの反復処理によって、画像Fに供給される得られた適応的処理された画像から取り除く。一つの形式では、各ピクセルをその隣接ピクセルの中央値に置き換えるメディアンフィルタを適用して、一般に雑音によって生成される可能性のある単一異常ピクセルを除去する。代わりにまたは追加して、1または複数の形態フィルタを利用して画像の構造を変更してもよい。そのような形態フィルタは膨張型および/または浸食型を含むことができる。本明細書で用いる「膨張フィルタ」は空隙を満たすことにより物体を厚くし、そして「浸食フィルタ」は迷子のピクセルを減らすことにより物体を薄くする。一つの特定の実験実施例において、始めに浸食フィルタ操作そして次に膨張フィルタ操作を生成する種々の設定で、一連の3〜4枚のフィルタを利用した。
【0061】
操作187aから、複数のフレームを特定のタイプの画像技術に利用することが可能かどうかのテストをする条件文188aに出会う。特に、複数のフレームが一般にプロシージャ120により生成され、条件文188aに肯定(真)の結果を与える。この肯定分岐から、疑わしい物体位置を一つのフレームから次のフレームへと比較して、疑わしい人工物体が隣接するフレームで見つかった場合には、物体検知を確認する手段を提供する操作189aに進む。フレームからフレームへのチェックが、検知された物体を条件文190aで確認する場合、ルーチン170aは、条件文190aの肯定(真)分岐から操作192aに進む。操作192では、これに続くプロシージャ120の操作200での処理のために、疑わしい物体の位置を人22の画像マップに対して相対的に記憶する。フレームからフレームへの検査に一貫性がない場合は、条件文190aのテストは否定(偽)であり、ルーチン170aは条件文194aに進む。さらに、複数フレームが利用可能でない、および/またはフレームからフレームへの検査が望まれない実施態様については、条件文188aのテストは否定(偽)であり、ルーチン170aは無条件に操作192aに進む結果になる。
【0062】
条件文194aは、すべての画像Fを処理したかどうかテストする。条件文194aのテストが否定(偽)の場合、操作195aでインデックスFをインクリメントし(F=F+1)、ルーチン170aはループ196aにより操作174aに戻り、次の画像Fのカーネルからカーネルへの解析を繰り返す。画像をすべて解析した場合、次に条件文194aの肯定の分岐に進み、ルーチン170aは停止して、その呼出しルーチン(プロシージャ120など)に戻る。
【0063】
ルーチン170aに追加してまたはその代わりに、ルーチン170bに従って操作170で画像データの数値処理を行ない、人22の衣服の下に携帯されている武器、密輸品などの1または複数の疑わしい物体が存在するかどうかを判断することができる。図7を参照し、ルーチン170bをフローチャートの形で示す。ルーチン170bは、操作172bで、イメージカウンタFを1にセットすること(F=1)により始まる。カウンタFが、ルーチン170bで処理するために、操作164から来る隣接した画像にインデックスを付ける。操作172bから、ルーチン170bが操作174bに進む。操作174bでは、現在の画像Fを区分化するかまたは多くの部分へ分割する。
【0064】
追加して図8を参照して、3つの隣接する欄に長方形の画像領域IRを図示する。左端の欄で、画像領域IRを、0〜17の番号を付した画像部分の第1のセット、セット1、へ区分化する。中央の欄で画像領域IRを、18〜27の番号を付した画像部分の第2のセット、セット2、へ区分化する。図8の右端の画像部分IRの表示の重ね合わせたセットで図示されるように、画像部分0〜17は画像部分18〜27と重複する。一つの実施態様では、区分のサイズを、関心対象の一般的な物体の型を表示するために必要な大部分の領域を含むことができるほど十分に大きく、しかしその物体の位置を定めることを困難にするほどには大きくないように選択する。Ku帯の電磁放射を利用する一つの編成では、約32×32ピクセルの区分サイズが望ましいことが判明した。それにもかかわらず、他の実施態様では、重複部分を有するまたは有しない、他のサイズ、形状、パターン、均一度、および/または種々の属性を、当業者が思いつくように変えてもよい。
【0065】
図7に戻って参照すると、ルーチン170bは操作176bへと続く。操作176では、各区分の画像データをフーリエ空間の周波数空間へフーリエ変換する。操作176bをサブシステム40により行ない、各画像区分に対応する空間周波数表現を与えることができる。通常は、そのような表現は複素数値である。人工物体はしばしば、人体などの自然物に比べて、通常は高周波の空間周波数をより高いパーセンテージで有する空間周波数表現を有していることが分かっている。さらに、人工物体に対する空間周波数表現は、フーリエ空間上の空間周波数分布において一定方向において支配的になる傾向がある。そのような特徴を、人工物体を明らかにした疑いのある画像部分を分類するために利用することができる。
【0066】
フーリエ変換演算により提供される型の空間周波数情報は通常、複素数値を含んでいるので、多くの場合物体検出手順の一部としてデータを単純化することが望ましい。操作178bでは抽出器を適用して、人工物体を示している可能性のある空間周波数表現から特徴を抽出する。図9をさらに参照して、3つの異なる特徴抽出器、FR1、FR2、FR3を、フーリエ空間に関して概略形式で図示する。特徴抽出器FR1は、フーリエ空間のゼロ(0th)周波数成分を中心とする楔形半平面およびリング状半平面を含むリング−楔構成である。この抽出器については、楔がスケール不変性を与え、またリングが回転不変性を与える。抽出器FR2はセクター構成である。各セクター内で空間周波数を積分することにより、対応する画像区分の角度方向および半径方向の様相を表わす1組の特徴を生成することができる。不変ではないが、抽出器FR2を、好ましい方向および/またはサイズを有する物体を識別するために利用することができる。抽出器FR3はリング構成であり、それは回転不変であって、したがって半径方向の空間周波数成分に基づいた区分を表わす。操作178bでは、これらの抽出器型(FR1、FR2、FR3)の1または複数を適用することができ、および/または異なる型の抽出器を利用することができる。さらに他の実施態様では、この段階の抽出は存在しなくてもよい。
【0067】
操作180bでは、操作178bの間に抽出された特徴を、サブシステム40で定義されたニューラルネットワークに入力する。一つの形式では、抽出された特徴をニューラルネットワークの多層パーセプトロン形式に入力する。物体識別のためのネットワークが、過誤アルゴリズムの逆伝播などの反復する訓練過程により構成される。さらに他の実施態様では、異なる型のニューラルネットワークおよび/または訓練技術を、追加してまたは代わりに利用することができる。べつのさらなる実施態様では、ファジイ論理、オペレータが支援するエキスパート学習システム等の異なる型の適応処理技術を、ニューラルネットワークに加えてまたはその代わりとして、利用することができる。代わりにまたは追加して、非適応的処理を利用することができる。
【0068】
操作180bから、ルーチン170bは、操作174b〜180bに従ってイメージをすべて処理したかどうかテストする条件文182bに続く。もしそうでなければ、操作184bでカウンタFにインデックスを付け(F=F+1)、ループ186bが次の画像を処理するために操作174bに戻る。条件文182bが肯定の場合は、ルーチン170bは操作188bに進み、ループ186bから種々の画像フレームに対して得られた結果を比較し、それらが互いに矛盾がないかどうかを判断する。円弧区分Sに関する一つの非制限的実施例において、円弧区分S1およびS2に対する画像結果を、それらが重複する程度まで互いに比較することができた(図5を参照)。同様に、円弧区分ペアS2とS3、S3とS4、S4とS5、S5とS6、S6とS7、S7とS8、およびS8とS1に対する重複する画像結果を、一貫性について、操作188bの間に比較することができる。他の実施態様では、より多くまたはより少数のフレームの比較および/または異なるフレームからフレームへの比較を行うことが出来る。さらに別の実施態様では、フレームからフレームへの比較は全く行われない。
【0069】
操作188bから、条件文190bに進み、そこでフレーム照合の結果および/または1または複数の他の望ましい検知閾値/判定基準が、関心対象の物体を示しているかどうかをテストする。そのような物体が示される場合には、人に対する相対的位置および物体画像データを操作192bで記憶する。条件文190bのテストが否定であれば、ルーチン170bは操作192bを迂回して戻る。操作174b〜180bおよび188bのうちのいずれか、および/または条件文190bの作業に、処理結果を1または複数の閾値または他の基準と比較して、対応する画像、画像部分または表現、画像特徴またはその他が、関心対象の物体を示しているかどうかを決定することが含まれ得ることを、理解するべきである。そのような基準は、本来静的または動的であり得る。動的な基準は、オペレータが調整可能なもの、適応的に機械が調整するもの、および/または当業者が考え付くであろう様々な技術により選択的に変更されるものでよい。図3に戻り参照すると、一旦ルーチン170bが完了すれば、プロシージャ120は条件文195に、そして1または複数の疑わしい物体が検知された場合、操作200に進むことができる。
【0070】
図10は、物体検知アレンジメント200をブロック図の形で図示する。アレンジメント200をシステム20により実現することができる。システム200では、符番202によって一般的に示されるように、所与のトランスデューサアレイ用の新しいデータ、ベースラインデータおよび均等化データを、プリプロセッサ204に入力する。プリプロセッサ204の出力はさらに、検査中の対象に関する内部画像データを生成することができる画像生成部206に提供される。この内部画像データを、グレイ階調のコンピュータで生成された形であるイメージ206aとして表示する。この内部画像データを、プライバシー問題のために表示しないこともできるし、および/または、以前にプロシージャ120に関して述べたように、性に基づく特徴を覆い隠す方法で提示することもできることを理解するべきである。
【0071】
生成部206によって提供される内部画像データは、さらに操作部208に含まれるニューラルネットワークIに提供される。ニューラルネットワークIは、ルーチン170aに関連して以前に述べたように、強度および深度差分情報に基づいて物体の存在を決定するように構成される。一つの形式では、操作部208を、図6に関連して以前に述べたルーチン170aを実行して、人工物体の可能性または構造的特徴を検知するように編成する。操作部208に加えて、画像データをさらに、操作部210に含まれているニューラルネットワークIIに提供する。操作部210を、場合によってはある型の爆発物を含むある型の誘電体材料を表している画像中の斑点を検知するように編成する。更に、生成部206からの画像データを、操作部212に含まれるニューラルネットワークIIIに供給する。操作部212は、空間周波数情報に基づいた人工的構造の特徴の検知を目標とする。一つの形式では、ニューラルネットワーク212を以前に図7〜9に関連して述べたルーチン170bを実行するように編成する。操作部208,210および/または212の出力を、ルーチン170aおよび/または170bに関連して述べたフィルタなどの様々なフィルタ214に供給して、1または複数の疑わしい物体の存在を示す出力を提供する。もし検知されれば、物体の視覚的な表現を性的に中立なシルエット表示上にオーバーレイすることができる。一つの形式では、そのような物体に対応する領域を、対照的な色、色調、陰影で、または以前にプロシージャ120について述べたものなどの他の手段によって示す。画像214aは、グレイ階調のコンピュータで生成したそのような出力例である。画像214aでは、2つの疑わしい物体が、領域215の対照的なグレイ階調の陰影により表示されている。
【0072】
アレンジメント200を、以前に述べたような様々なハードウェアおよびソフトウェア技術により、システム20で実現することができることを認識するべきである。更に、ニューラルネットワーク208、210、および212を直列にして示したが、それらを平列または直列/平列の組合せで、ならびに当業者に考えられる様々な他の方法で、配列してもよい。確かに、プロシージャ120、ルーチン170a、ルーチン170b、および/またはアレンジメント200の1または複数の操作を実行するために用いることができる、他の多くの構造的な実行系およびシステムが存在する。
【0073】
図1のシステム20に戻ってこれを参照し、トランシーバー42およびプロセッサ44は、プロシージャ120、ルーチン170a、ルーチン170b、アレンジメント200、および/またはこれらの変形に関連して記述したものを含めて、本明細書に記載する各種の操作を行なうように編成することができるロジックを含む。このロジックは、ほんの少数を挙げれば、ソフトウェアプログラミング命令、ファームウェア、および/またはハードウェアに組み込まれた形をとることができる。更に、そのようなロジックは、メモリ46、R.M.D.48および/またはコンピュータネットワーク70の1または複数の部分が所持する1または複数の信号の形をとることができる。一つの実施例では、1または複数の操作を行なうロジック信号が、プロセッサ44に/から、ネットワーク70を介して伝送される。代わりにまたは追加して、プロセッサ44用のプログラミングがR.M.D.48および/または1または複数の他の記憶デバイスを通じて輸送または伝播される。プロシージャ120、ルーチン170a、ルーチン170b、および/またはアレンジメント200(関連するロジックを含む)の操作を実行することができる他のシステムの非限定的な例には、図11〜18に関連して下記のように記述するものが含まれる。
【0074】
図11および12が、プロシージャ120、ルーチン170a、ルーチン170b、および/またはアレンジメント200に関して記述した1または複数の操作を行なうために用いることができる本発明のさらなる実施態様のシステム220を図示する。システム220は、システム20に関連して記述した事情で選択された電磁放射により人222を照射する。システム220については、人222が、ファントム画法で示される物体225を隠蔽している衣料品を着用している。以前に記述したシステム20の実施態様のように、システム220は生物でない物体の検査に同様に使用することができる。システム220は、検問所231で走査門230を定める2重の貝殻型のパネル238を含む。
【0075】
システム220はまた、通常は1人または複数人のオペレータが看視し、門230のパネル238に接続される監視/制御ステーション250を含む。ステーション250は処理サブシステム240を含む。サブシステム240を、サブシステム40と同様に、しかし門230の走査技術の差を考慮して、より詳しくは以下に記述するように構成することができる。ステーション250は、システム20に関連して記述したように、さらにサブシステム240に接続されている1または複数のオペレータ入力および出力デバイス(示さず)を含む。門230は、人222を支持するように配置された静止したプラットフォーム232を含む。プラットフォーム232を、一般に検査放射線に対して透明な材料で作成することができる。門230は、さらにアレイ236および各々のパネル238のためのモーター/駆動機構234を含む。アレイ236は、システム20に関連して述べたように、素子38の列で形成される。機構234およびアレイ236は機械的に互いに連結され、サブシステム240に操作可能に接続される。サブシステム240の制御の下に、モーター/駆動機構234は、アレイ236のそれぞれを、図12に最もよく例示される対応する走行経路P1またはP2に沿って制御可能に移動させるように構成される。特に、経路P1およびP2は軸Zの周りに回転する非直線の曲線型である。軸Zは図12に十字線で表され、図11中で最もよく図示されている垂直方向に対応する。対応して、各アレイ236は、それぞれの機構234によって駆動された時、プラットフォーム232および人222を含む検査領域239の周りに回転する経路を辿る。代わりにまたは追加して、経路P1およびP2のどちらかまたは両方を、曲線から成るか角度のある様式で少なくとも一つの他の経路部分に連結された少なくとも一つの直線状の経路部分で構成することができる。また別の配置では、経路P1およびP2の1または複数が斜めの角度で次々に連結された多数の直線状の経路区分で構成され、共同で検査領域の一部分の周りを回わる。この配置の一つの特定の形式では、経路区分を円弧または他の曲線から成る形に近似するように方向付ける。さらに、経路P1およびP2は一般に同じ長さで、また軸Zに関して対称であるが、他の実施態様では、経路P1およびP2は同じ長さでなく、および/または対称ではなくてもよい。一つのそれに代わる変更では、3枚以上のパネル、アレイ、および対応する経路を利用する。
【0076】
機構234は、それぞれのアレイ236用の運搬装置を駆動するために電動モーターまたは他の制御された原動機を含むことができる。そのような装置は、ベルト駆動、チェーン駆動、ローラー駆動または選択的にアレイ236を移動させるために当業者が考えつく他の機械化された連結を含むことができよう。他の実施態様では、単一の原動機を利用し、それに異なるパネル中の複数のアレイ236を機械的に連結させて、協調して移動させてもよい。さらなる実施態様では、所望の範囲の電磁エネルギーを送信および/または受信するために、別の走査編成を利用することができよう。
【0077】
システム220では、サブシステム240が、システム20におけるサブシステム40と同じに構成され、またプロシージャ120、ルーチン170a、ルーチン170bおよび/またはアレンジメント200に関連して記述した1または複数の操作を行なうように同様に編成され;そして、1または複数のトランシーバーおよび/または切替ツリーを適切に含むことができる。しかし、サブシステム240の操作は、人220の周面に関する検査を完全には提供しない。代わりに、検査が360°より少ない部分的な周面に対して行なわれる。行なわれる検査は、アレイ236が従う経路P1およびP2によって張られる角度A1およびA2に対応する。一つの好ましい実施態様では、角度A1およびA2は、少なくとも90°である。もっと好ましい実施態様では、角度A1およびA2はそれぞれ120°以下である。さらに好ましい実施態様では、角度A1およびA2は合わせて、領域239の回りに少なくとも240°の周面走査適用範囲を与える。システム220は、プラットフォーム232に対するアレイ236の位置を追跡するための、操作可能にシステム240に接続された1台または複数台のエンコーダ(示さず)および/または他のデバイス/技術を含むことができる。システム220は、さらにサブシステム60と同様の、サブシステム240と遠隔で通信するための通信サブシステム(示さず)を含むことができる。
【0078】
一つの特定の編成では、一つのアレイ236をそれぞれ収容するために、パネル238を形づくり構成する。アレイは各々が高さ約7フィートで、224個の素子38を含み、10〜20GHzの周波数範囲で作動する。より具体的には、アレイ236は各々、それぞれが112個の素子38からなる2つのサブアレイを含む。各アレイ236については、対応するサブアレイ対を背中合わせに配列する。この編成は2つの超広帯域のトランシーバー、および各アレイ236に対して1つずつの2つの対応する切替ツリーを利用し、選択的に一つの素子38で送信し別の素子38で所望の順序で受信する。サブシステム240内の高速コンピュータが、機構234、アレイ236、トランシーバーおよび切替ツリーを制御して、処理のための地形図的データを獲得する。パネル238は互いに向き合って、この配置に対して約240°の角度走査範囲を与える。このシステムを操作する一つの方式では、監視下の人222が「入口」という矢に沿ってパネル238間の領域239に入る。次に人222は、パネル238の一つの方へ向き、1〜2秒間対面し、その間にアレイ236が経路P1およびP2に沿って移動して走査を行なう。走査の後で、人222が回転し、「出口」という矢に沿って出る。この手順によって提供される240°の範囲をカバーすることが、セキュリティを脅かすほとんどの物体を検知するのに適切であることが明らかになった。パネル238をそれぞれ少なくとも部分的に透明に作成して、領域239に居る人222の検査の間に、オペレータがそれを通して見るのが容易になるようにする。
【0079】
図13を参照して、本発明に従って行なわれた研究室シミュレーション実験によって生成されたマネキン222aの断面の画像を示す。そのような断面画像は、プライバシー異議がなされる可能性がある画像を提供する可能性を低下させる一方、疑わしい物体の検知を容易にする。マネキン222aの種々の切断線255a、255bおよび255cについて得られた、列260、270および280の中の多くの図で、マネキン222aを画像化する。断面画像260a、270aおよび280aが、切断線255aに沿い、かつ軸Zに対して直角な断面に対応する。同様に、断面画像260b、270bおよび280bが、切断線255bに沿い、かつ軸Zに対して直角な断面に対応する。さらに、断面画像260cおよび280cが、切断線255cに沿い、かつ軸Zに対して直角な断面に対応する。列260に示される断面画像260a、260b、および260cが各々、軸Zに沿った、物体を携帯しておらず、また360°外周全体が画像化された断面図に対応する。列270の画像270aおよび270bもまた完全な360°外周断面図を提供し、またさらに、衣服によって隠された様々な脅威を描写する。具体的には、断面画像270aでは、小さな拳銃235および誘電体スラブ235aが検知されている。断面画像270bでは、手榴弾235bが検知されている。列280の画像280a、280bおよび280cは各々、240°の部分的な外周図を描写し、システム220の一つの配置に対応する。このシステムでは、不完全な適用範囲(部分的な外周)が、それにもかかわらず手榴弾235dを明らかにする。システム220の360°より少ない適用範囲の設定は、一定の使用で望まれるより速い走査および処理時間を提供することが発見された。
【0080】
システム220のこの特定の実験的設定については、パネル238をFM/CWモードで、20μsec未満で10〜20GHzを掃引するよう操作し、約1cmの画像解像度および約1.5cmの距離分解能を提供する。この方式の操作中、アレイ236を各々、2つの垂直方向に向けたサブアレイを背中合わせに配備した形で提供する。一つのサブアレイは送信、他方は受信専用とする。一つの形式では、各サブアレイを、スロットライン・アンテナ型の112個の素子で製作する。各サブアレイについて、素子を均一距離だけ互いに離して配置する。操作中に、走査デバイスが、一般に水平な走行経路P1またはP2の上を素早く移動する間に、各サブアレイは素子から素子へと電子的に走査される。アレイが移動する間、多くの走査を、一度にただ一つの送信する素子、およびその送信による反射電磁放射を受信するただ一つの素子で行なう。各送信素子および各受信素子を、走査中に所望の順序に従って作動させる。それにもかかわらず、さらに他の実施態様において、当業者が考えつくであろう直線状のアレイ配置の異なる数、サイズ、または型を利用することができる。さらに他の実施例で、種々の型の回転するおよび/または直線状の走査アレイを、別々にまたは組合せて利用することができる。さらに、断面画像の代わりにまたは追加として、他の型の画像および/またはプライバシー問題に対処するために図1〜10の実施態様に関連して記述したように、自動的隠蔽物体検知技術を利用することができる。
【0081】
図14および15が、本発明の別の実施態様のシステム320を図示する。これはプロシージャ120、ルーチン170a、ルーチン170b、および/または図10に関連して記述したアレンジメント200の1または複数の操作を行なうために用いることができる。システム320は、システム20に関連して記述した方式により人322を選択された電磁放射で照射する。システム320については、人322がファントム画法で示された物体325を隠蔽する衣料品を着用している。以前に記述した実施態様のように、システム320は無生物の検査にもまた用いることができる。システム320は、2重平面パネルの走査門330、および監視/制御ステーション350に含まれる処理サブシステム340を有する。門330を処理サブシステム340に接続し、より完全に以下に記載するような門330の走査技術の差を考慮して、サブシステム40と同様に構成することができる。ステーション350は、システム20について記述したような、サブシステム340に接続された1または複数のオペレータ入力および出力デバイスを含む。ステーション350を、門330に隣接して検問所オペレータインターフェースを提供するように編成することができる。
【0082】
門330は、人322および頭上のモーター/駆動サブシステム334を支持するために配置された静止プラットフォーム332を有する。サブシステム340の制御下で、サブシステム334を、2つのアレイ336それぞれを、対応するガイド棒337に沿って縦軸VAに対して上下方向に、制御しながら滑らせるように構成する。これに対応して、アレイ336はそれぞれ、人322を挟んで向かい側の一般に真直な直線状の経路を辿りまた各々向き合った対応するパネル338内に含まれている。図15は、パネル338のうちの1つを、部分的に切り開いた図面を利用してより詳細に示す。システム320において、サブシステム340は、以前に記述したものと大体は同じ操作を行なうためにシステム20のサブシステム40と同様に構成され、また適切にトランシーバーおよび/または切替ツリーを含むことができる。しかしながら、システム20とは対照的に、サブシステム340の操作は、システム20に関して記述した回転方式の代わりに、アレイ336の人322に対する直線状の並進運動から成る。システム320は、プラットフォーム332に対するアレイ336の位置を追跡するために、システム340に操作可能に接続された1台以上のエンコーダ(示さず)および/または他のデバイス/技術を含むことができる。システム320はさらに、遠隔でサブシステム340と通信するために、サブシステム60と同様の通信サブシステム(示さず)を含むことができる。
【0083】
一つの特定の配置では、パネル338を、約1.22m離して置き、またKu帯域中の約12.5〜18GHzの周波数掃引を行なって、約1cmの横方向分解能および約2.7cmの深度解像度を提供する。この配置に対しては、各アレイ336は、背中合わせに配置された、それぞれ約56個の素子の2つのサブアレイを含む。各アレイ336内の、一つのサブアレイを送信専用、別のサブアレイを受信専用とする。一つの形式では、各サブアレイを、約2cm互いに離れて置かれたスロットライン・アンテナで製作する。操作中には、走査器が人322の垂直方向の長さ全体を素早く移動する間、各サブアレイが電子的に素子から素子へと走査される。アレイが移動するとともに、多くの走査をアレイ336により行なう。各走査中、いかなる時にも、送信サブアレイの一つの素子のみが人を照射しており、また受信サブアレイの一つの素子のみが反射される電磁放射を集めている。従って、走査中には、所望の順序に従って各送信素子および各受信素子が作動される。この配備のFM/CWヘテロダイントランシーバー構成においては、5.5GHz周波数掃引を約12.75μsで行なう。一つの形式では、システム320は、操作162における地形図的表現および/またはフレームの生成は含まない、したがってルーチン170aおよび170bに関連して記述したフレームからフレームへの一貫性のチェックは行なわれない。さらに他の実施態様では、当業者が考えるであろう異なる数、サイズまたは型の直線状のアレイ配置を利用することができる。さらに他の実施例では、種々の型の回転するおよび/または直線状走査アレイを別々にまたは組合せて利用することができる。さらに、システム320を1または複数の人322の断面図を生成するために用いることができ、および/または、プライバシー問題に対処するために図1〜10の実施態様に関連して記述した1または複数の他の手法を利用することができる。
【0084】
図16は、本発明の別の実施態様の検査システム420を図示する。システム420は、システム20に関連して記述した方式で人422を選択された電磁放射により照射する。システム420では、人422が物体425を隠す衣料品424aおよび424bを着用している。以前に記述した実施態様のように、システム420は生物でない対照を検査するためにも用いることができる。
【0085】
システム420は、制御および処理サブシステム440に接続された走査ブース430を有する。走査ブース430は、人422を支持するように配備された静止プラットフォーム432およびアレイ436に連結されたモーター434を支持するためのフレーム433を含む。門30のプラットフォーム回転および門330に付随した並進運動とは対照的に、走査ブース430は検査中に回転軸Rおよびプラットフォーム432の周りにアレイ436を選択的に回転させる。この配置については、アレイ436は一般に円形の経路に従い、対応する想像上の円筒をプラットフォーム432の周りに提供する。立っている姿勢の人を走査するのに適した一つの形式では、この円筒の半径は約1mである。それ以外はアレイ36と同じにアレイ436を配置する。
【0086】
システム420では、サブシステム440をシステム20のサブシステム40と同様に構成し、またプロシージャ120、ルーチン170a、ルーチン170b、および/または、アレンジメント200の1または複数の操作を行なうために同様に編成して、セキュリティを脅かす可能性のある物体を検知する。しかし、サブシステム440の操作は、システム20でのアレイ36に対するプラットフォーム32の移動ではなく、プラットフォーム432に対するアレイ436の移動から成る。システム420は、サブシステム440に操作可能に接続された1台または複数台のエンコーダ(示さず)および/または他のデバイス/技術を、プラットフォーム432に対するアレイ436の位置を追跡するために含むことができる。システム420はさらに、遠隔でサブシステム440と通信するためにサブシステム60と同様な通信サブシステム(示さず)を含むことができる。システム420は、人422の1または複数の断面図を生成するために用いられることができ、および/またはプライバシー問題と取組むために図1〜10の実施態様に関連して記述した1または複数の他の手法を利用することができる。
【0087】
図17は、本発明のさらに別の実施態様の電磁放射検査システム520を図示する。システム520は、以前に記述した型の選択された電磁放射により人522を照射する。システム520については、人522が、物体525を隠蔽する符番524aおよび524bにより示された外被/衣服を着用している。以前に記述した実施態様のように、システム520を生きているまたは生きていない物体を検査するために用いることができる。
【0088】
システム520は、制御および処理サブシステム540に接続された走査ブース530を含む。走査ブース530は、人522を収容しかつアレイ536を支持するために設置されたフレーム533を有する。以前に記述したシステム20および420の、直線的に配向されたアレイ36、336、および436とは対照的に、アレイ536は、一般に中心線縦軸CVAを中心にしてリングまたは円輪として配置される。多数の電磁放射送信/受信素子を、一般に輪に沿った円形の経路に配置する。これらの素子は、ミリメートル波、マイクロ波、および/または隣接した波長帯中の1または複数の波長を含む電磁放射によって人522を検査するように作動する。アレイ536を、人522を走査するために、移動矢印Tによって表わされるように軸CVAに沿った並進運動をするように配置する。1または複数のモーターまたは他の原動機(示さず)を、軸CVAに沿って選択的にアレイ536を移動させるために利用する。
【0089】
図18の部分的な上面図をさらに参照して、アレイ536を開口537のサイズに合わせ、アレイ536が軸CVAに沿って上下に移動する際に、人522をそれを通って受け入れる。図18では、軸CVAは表示面に一般に垂直であり、十字線によって表わされている。アレイ536の上下運動により、想像上の円筒が人522の周りにアレイの円輪によって定まる円形経路に従って定義される;しかしながら、人522もアレイ536のどちらも相手に対して回転しない。代わりにアレイ536の並進運動が、人522を垂直に走査するために用いられる。
【0090】
サブシステム540は、サブシステム540の処理がアレイ436とその周辺のデバイスの垂直並進運動を担うように適応されていることを除けば、サブシステム40と同様に構成され、プロシージャ120、ルーチン170a、ルーチン170b、および/または1または複数の操作またはアレンジメント200を実行できる。システム520は、遠隔でサブシステム540と通信するためにさらにサブシステム60と同様な通信サブシステム(示さず)を含むことができる。以前に記述した実施態様と同様に、システム520は、プロシージャ120に関連して説明したように、隠蔽された物体を検知するために用いられる。
【0091】
アレイ36と比較して、アレイ536が以前に記述した実施態様と同等な解像度を有するためには、通常はより多くの送信/受信素子が必要である。一つの非限定の比較例において、選択された周波数帯に依存して、アレイ536のためには500〜2000送信/受信素子が、これに対して、アレイ36のためには200〜600が、同等な解像度に対して望ましいであろう。しかしながら、適切な条件下では、走査ブース530は、門30より実質的に速く走査を行なうことができる。一つの非限定の実施例において、門30の走査時間が約10〜20秒の範囲であるのに対して、走査ブース530では約2〜5秒である。システム520は、人522の1または複数の断面図を生成するために用いられ、および/またはプライバシー問題を取り扱うために図1〜10に関連して記述した1または複数の他の手法を利用することができる。
【0092】
本発明のさらなる実施態様では、検査が行われている身体およびアレイの両方が移動する。一つのそのような実施例において、アレイ要素は垂直に移動することができる円弧区分の中に配置され、一方身体は回転する。他の実施例では、アレイと身体の両方が回転および/または並進移動する。検査データの処理を、当業者に既知の技術を用いてこれらの種々の移動方式に対して調整することができる。
【0093】
システム220に関連して記述したように、検査および対応する画像情報は検査される身体の全周面に対応していなくてもよい。そのかわり、関心対象の区分は360°未満であり得る。そのような実施態様については、2以上の異なる視角に対応するデータを組み合わせることにより、画像情報を内挿することができる。代わりにまたは追加して、他の実施態様では、対象全体の高さ、幅、および/または長さより少なく走査してもよい。そのような選択枝に対しては、アレイのサイズおよび/または走査パターンを対応して調節することができる。
【0094】
本発明のさらに他の実施態様では、システム20,220、320、420、および/または520で集められた画像データは、地形図的表現を提供するために画像のいくつかまたはすべてを組み合わせなくても、多くの円筒状の画像に対応している。代わりに円筒状の画像を、組み合わせずにまたは単に部分的に組み合わせて用いる。さらに他の実施態様では、画像化は、地形図的表現を提供するためのある程度の組み合わせをしても、またはしなくても、元来完全にまたは部分的に非円筒状であってもよい。一つの特定のケースでは、システム320の平面状パネルが、円筒状の画像情報の代わりに、複数フレームのない平面状の画像情報を提供してもよい。
【0095】
一つのさらなる実施態様では、プロシージャ120、ルーチン170a、ルーチン170b、アレンジメント200、システム20、システム220、システム320、システム420、および/またはシステム520に従って獲得した画像情報を、さらに個人を識別するために利用する。この実施態様の一つの形式は、制限区域へのアクセスを制御するための:制限区域にアクセスすることを試みる個人を走査する工程;個人が任意の物体を隠蔽しているかどうかを、走査から判断する工程;個人の特徴に関する対応する画像情報の1または複数の様相を、制限区域へのアクセスを許可された者のために記憶されたデータと比較する工程;および、好ましい比較があり、疑わしい隠蔽された物体が示されない場合に、個人による制限区域へのアクセスを許可する工程、を含む技術を含む。適合したという決定を、ゲートまたは他のアクセス制御デバイスを作動させるために用いることができる。
【0096】
別の実施態様では、プロシージャ120、ルーチン170a、ルーチン170b、アレンジメント200、システム20、システム220、システム320、システム420および/またはシステム520に従って集められた画像情報を、追加してまたは代わりに、犯罪容疑者、公知のテロリスト等のアクセスを許可するべきでない個人を識別するために用いる。そのような実施態様のもう一つの変形では、個人の1または複数の他のバイオメトリックス(指紋、掌紋、網膜イメージ、音声パターン、その他)を、地形図的表現データに加えて、アクセスを許可するべきかどうかの決定の一部として比較する。識別に用いられる特徴を、アクセス制御手段を巧みに逃れる可能性を減少させるために、各アクセス毎に変更することができる。代わりにまたは追加して、本発明による物体検知法を、個人が許可されていない領域から物体を持ち出そうとしているかどうかを判断するために用いることができる。これらの実施態様のいずれも、方法、装置、システム、および/またはデバイスとして提供することができる。
【0097】
本明細書において引用されたすべての出版物および特許出願は、あたかも個々の出版物または特許出願がそれぞれ具体的に個々に参照によって組み入れられることが示されたかのように、参照によりすべて本明細書に組み入れられる。さらに、本明細書において述べた任意の理論、操作の機構、証明または発見は、さらに本発明についての理解を向上させることを目的とするものであり、そのような理論、操作の機構、証明または発見について本発明をどのように制限することも意図するものではない。本発明を図面および先の記述の中で詳細に図示し記述したが、それらは、例証であり性質上限定するものではないと考えるべきであり、選択した実施態様のみを示して記述したこと、および、本明細書においてまたは特許請求の範囲によって定義される本発明の精神に含まれる、すべての等価なもの、変更、および修正は保護されることが望まれることを理解するべきである。
【図面の簡単な説明】
【0098】
【図1】セキュリティ点検システムの部分的な線図である。
【図2】図1で示した視線2--2に沿った図1のシステムの部分的な上面図である。
【図3】図1のシステムを操作するための一つの手順を図示するフローチャートである。
【図4】図1のシステムを操作するための一つの手順を図示するフローチャートである。
【図5】多数の重複する円弧区分を図示するする図1のシステムの模式的な上面図である。
【図6】一つのタイプの物体検出ルーチンのフローチャートである。
【図7】別のタイプの物体検出ルーチンのフローチャートである。
【図8】図7のルーチンで使用するための、画像の重複した長方形の部分への区分化を図示するダイアグラムである。
【図9】図7のルーチンで使用するための3つの異なる型の特徴抽出器を比較する線図である。
【図10】図6および7の両方のルーチンにより図3および4のプロシージャを実行するために図1のシステムを利用する、隠された物体を検知するためのアレンジメントの概要のブロック・ダイアグラムである。
【図11】さらなるシステムの部分的な線側面図である。
【図12】図11に示した視線12---12に沿った図11のシステムの部分的な線上面図である。
【図13】本発明の様々な技術に従って生成された断面画像を図示する比較ダイアグラムである。
【図14】別のシステムの部分的な線図である。
【図15】図14に示した門の部分的な切り取り図である。
【図16】さらに別のシステムの部分的な線図である。
【図17】また別のシステムの部分的な線図である。
【図18】図17に示した視線18--18に沿った図17のシステムの部分的な線上面図である。
【技術分野】
【0001】
本発明は電磁放射走査/画像技術に関し、より詳細には、人が衣服の下に携帯する隠蔽された物体の検知に関するが、それに限定されない。
【0002】
武器、密輸品、および他の隠蔽された物体の検知は、検問所その他における重要な関心事である。ある手法は磁力計を利用して一定の金属性物体を検知する。残念なことに、この手法は、安全上の脅威をもたらす可能性のある火器、爆発物、および他の物品を製作するために用いることができる大部分の有機高分子および複合材料を検知しない。
【0003】
別の手法では、選ばれた波長範囲内の電磁放射を、衣服によって隠蔽された物体を暴くことができる画像を提供するために使用することができる。しかしながら、この手法は、通常、検査速度および/または画像解像度に関する制限に直面し、そのため、ある種の大量輸送交通機関の検問所などの一部の使用には不適切であるとされてきた。さらに、これらのシステムは、通常は衣類によって隠蔽することを意図している身体各部の詳細画像を提供することができるため、人間の検査官を利用することは、点検されている人に恥ずかしい思いをさせ、プライバシーの権利を侵害しているという懸念を生ずる可能性がある。したがって、この技術分野はさらなる貢献を現在必要としている。
【0004】
関連出願の相互参照
本出願は、2003年6月26日出願の米国特許出願第10/607,552号の一部継続出願であり、および2001年3月16日出願の米国特許出願第09/810,054号(現在、米国特許第6,507,309号)の継続出願である2002年11月21日出願の米国特許出願第10/301,552号(現在、米国特許第6,703,964号)の一部継続出願である。本出願は、共に2003年10月30日出願の米国特許出願第10/697,965号および10/697,848号に基づいて優先権を主張する。上記の特許および特許出願はそれぞれ、参照によりその全体を本明細書に組み入れられる。
【0005】
政府の権利
本発明は、契約番号DE-AC0676RLO1830の下に米国エネルギー省により与えられた国庫補助により為された。政府は本発明に一定の権利を有する。
【背景技術】
【0006】
概要
本発明の一つの実施態様は物体を検知する独自の技術である。他の実施態様は、人が物体を隠蔽しているかどうかを判断するための独自のシステム、デバイス、方法および装置を含む。
【0007】
本発明のさらなる実施態様は:人の衣類の下の表面から返ってきた約200メガヘルツ(MHz)〜約1テラヘルツ(THz)の範囲に1または複数の周波数を有する電磁放射を検知する工程、返された電磁放射から表面に沿った強度および深度に対応するデータを確立する工程、およびデータを適応的に処理し、人が疑わしい物体を携帯しているかどうかを決定する工程、を含む技術である。
【0008】
本発明の別の実施態様は:隠された物体を携帯する人を含む検査領域を照射する工程、照射に応じてその領域から返された電磁放射を検知する工程、検査領域に沿った、検査領域から返された電磁放射の強度のマップおよび深度のマップを表わすデータを確立する工程、ならびにデータをニューラルネットワークに入力して強度と深度のマップに基づいて隠蔽された物体を検知する工程、を含む技術を目標にする。
【0009】
さらに別の本発明の実施態様は、対象から返された電磁放射を検知するための技術を含み、ここで電磁放射は約200MHz〜約1THzの範囲に1または複数の周波数を含む。対象の1または複数の表面に沿った対象から返された電磁放射の強度および深度差分に対応するデータを確立する。データについて適応的な処理を行ない、密輸品または潜在的な安全上の脅威の少なくとも1つであると疑われた人工物体が存在するかどうかを強度および深度差分の関数として決定する。一つの形式では、検査している対象が人であって、人の衣服の下に隠匿されているかもしれない疑わしい物体を検知するために技術を用いる。いくつかの多ピクセル画像部分の各々を評価するニューラルネットワークにより適応的な処理を行なうことができる。ニューラルネットワークへの入力の第1のセットの各々は、1つずつの画像部分に対する画像ピクセルに対応して画像ピクセル強度を受け取り、ニューラルネットワークへの入力の第2のセットの各々は、1つずつの画像部分に対する画像ピクセルに対応して深度差分ピクセル入力を受け取る。
【0010】
本発明のさらなる実施態様は、約200MHz〜約1THzの範囲の1または複数の周波数の電磁放射で人を検査する操作可能なアレイ、および処理サブシステムを含む。このサブシステムはアレイに連結され、入力の第1のセットおよび入力の第2のセットを含むニューラルネットワークを規定するように作動する。入力の第1のセットは、検査される人の衣服の下の表面に沿った、返って来る電磁放射強度のマップに対応するデータを受け取る。入力の第2のセットは表面深度のマップに対応する他のデータを受け取る。ニューラルネットワークは、密輸品および潜在的な安全上の脅威の少なくとも1つであると疑われる1または複数の物体を人が隠蔽しているかどうかを評価し、1または複数の対応する出力を与える。この評価を強度マップおよび深度マップの関数として行なう。
【0011】
またさらなる実施態様は、約200MHz〜約1THzの範囲に1または複数の周波数を含む電磁放射から得られた人の画像に対応するデータを、1または複数のプロセッサによって解析することが可能なロジックを所持するデバイスを含む。このデータは、人に対して決定された電磁放射の強度のマップおよび深度のマップを表わす。1または複数の疑わしい性質の物体を人が隠蔽しているかどうかを電磁放射の強度マップおよび深度マップの関数として評価するようにロジックは、データを用いて適応的な処理を実行するように操作可能である。一つの形式では、デバイスはプロセッサが判読可能なメモリを含み、またロジックはメモリに記憶された多数の命令の形をしている。別の形式では、デバイスがコンピュータネットワークの1または複数の部分を含み、ロジックはこのネットワーク上の伝達ための1または複数の信号中にコードされている。
【0012】
本発明のさらなる実施態様は、電磁放射で人を走査し、人が物体を携帯しているかどうかを決定する技術を含む。この決定を、走査から得られた画像データの評価によってすることができ、これにはオペレータによる1または複数の対応する画像の点検を含んでもよい。一つの形式では、通常は公衆から隠される身体的特徴の画像化から生じるかもしれないプライバシー問題を最小限にするために、オペレータは、人の身長に沿って取得した人の1または複数の断面図を点検する。
【0013】
別の実施態様では、約200メガヘルツ(MHz)〜約1テラヘルツ(THz)の周波数範囲内の電磁放射を人に照射する。人の画像を表すデータが照射から確立され、対応する画像データが提供される。一つの形式では、照射をそれぞれが人の周りを回転する経路に従う1対のアレイにより行なう。この形式の一つの特殊な実施では、それぞれのアレイをそれぞれが人の周りに弯曲した1対の向き合ったパネルとして提供する。これらのパネルを検問所を供給するために用いることができ、個人のアクセスを制限する1または複数の他のデバイスと共に用いてもよい。
【0014】
さらに別の実施態様では、システムは、検査領域をその間に設定するために互いに離れて置かれた2つ以上のアレイを含む。アレイをこの領域のまわりを回転するように構成して、人または物体を約200MHz〜約1THzの範囲の1または複数の周波数の電磁放射により検査する。さらに、アレイによって提供される1または複数の検査信号から決定される画像に対応するデータを確立するよう操作可能な1または複数のプロセッサが含まれる。1または複数のプロセッサはこのデータの関数として出力を生成する。システムは、この出力に応答して、オペレータへセキュリティを脅かす物体の存在が疑われるかどうかの指示を供給するデバイスをさらに含む。
【0015】
本発明のさらに別の実施態様は:アレイの間に置かれた人の周りに各々が回転するように形づくられた2つ以上のアレイを用意する工程;アレイを操作して、約200MHz〜約1THzの範囲の1または複数の周波数の電磁放射により人の検査を行なう工程;および、検査から画像データを生成して、人が物体を隠蔽しているかどうかを検知する工程、を含む。
【0016】
本発明のさらなる実施態様は:2つ以上のアレイにより、その間に置かれた人の検査を行なうために約200MHz〜約1THzの範囲の1または複数の周波数の電磁放射を生成する工程;検査の間に人の周りの非直線状の経路に沿って少なくとも一つのアレイを動かす工程;および、検査から画像データを生成して、人が物体を隠蔽しているかどうかを検知する工程;を含む。
【0017】
本発明のさらなる実施態様は、約200MHz〜約1THzの範囲に1または複数の周波数を有する電磁放射により人の検査を行なう工程を含む。1または複数の人の断面画像を検査に基づいて生成し、これらの画像の少なくとも1つから、人がセキュリティを脅かす隠蔽された物体を携帯しているかどうかを決定する。
【0018】
従って、本発明の一つの目的は関心対象の物品を検知するための独自の技術を提供することである。
【0019】
別の目的は、関心対象の物体が隠蔽されているかどうかを判断するための独自のシステム、方法、デバイス、または装置を提供することである。
【0020】
本発明の他の目的、実施態様、形式、特徴、長所、局面および利点は、本明細書に含まれる詳細な説明および図面より明らかになるであろう。
【発明の開示】
【0021】
詳細な説明
本発明は様々な形に具体化することができるが、本発明の原則についての理解を促進する目的で、図面で示す実施態様についてここで言及し、それを記述するために特定の言語を用いることにする。しかし、それによって本発明の範囲を制限することを意図するものではないと理解されるであろう。本発明の関連分野の当業者が通常思いつくであろう、記載した実施態様の任意の変更およびさらなる修正、ならびに本明細書に記載する本発明の原理の任意のさらなる応用も予期されている。
【0022】
図1は、本発明の一つの実施態様のセキュリティ検査システム20を図示する。操作において、システム20は、生命のあるまたは生命のない物体を、200メガヘルツ(MHz)〜1テラヘルツ(THz)の周波数範囲の電磁放射で照射し、反射された電磁線を検知することにより、検査する。一般に、対応波長は数センチメートルから数マイクロメートルまでの範囲である。ある天然繊維および合成繊維は、多くの場合そのような周波数/波長に透明かまたは半透明であり、そのような材料の下に位置する表面の検出および/または画像化が可能である。検査の対象が服を着た個人である場合、衣服または外被によってカバーされない部分だけでなく、衣服または外被によってカバーされた人体の部分に関する画像情報も通常はシステム20により得ることができる。さらに、人が携帯する衣服の下の物体に関する画像情報を、システム20により、一般に武器および密輸品に用いられる金属および非金属の物体構成物について提供することができる。
【0023】
図1に図示するように、物体Bはシステム20による検査のために提供された人22の形をしている。人22は、符番24aおよび24bによってより具体的に指定された外被または衣服によって少なくとも部分的に覆われた、典型的な方式で描写されている。衣料品24aおよび24bが、ファントム画法で武器の形に示された物体25を隠蔽している。人22は、システム20の走査/照射門30に位置している。門30は、武器および/または密輸品を検知することが望まれる検問所に設置するために構成されている。門30はモーター34に接続されたプラットフォーム32を含む。プラットフォーム32は、人22またはシステム20による検査が望まれるような他の物体を支持するように配置する。モーター34は、プラットフォーム32を、人22がその上に位置している間に、回転軸Rの周りに選択的に回転させるために配列される。示した方向については、軸Rがほぼ垂直であり、また人22は軸Rおよびプラットフォーム32に対して一般に中央の位置に居る。一つの形式では、プラットフォーム32を、有機熱可塑性または熱硬化性ポリマーなどの、ときどき武器が隠される場合がある靴底の中または下を検査できる材料で構成することができる。
【0024】
門30はさらに複数素子の検知用アレイ36を含む。さらに図2の部分的上面図を参照して、さらにプラットフォーム32のアレイ36との関係を説明する。軸Rは、一般に図2の画面に垂直であり、十字により表わされている。モーター34がプラットフォーム32を軸Rの周りに回転させるとき、アレイ36が軸Rの周りの一般に円形の経路Pに外接する。円形の経路Pは、門30の検査領域に相当する半径Dの仮想の円筒Cに対応する。半径Dは軸Rからアレイ36までの距離である。一つの好ましい形式では、半径Dは約0.25m〜約3mである。より好ましい形式では、半径Dは約0.5m〜約1.5mであり、直径約1m〜3mに対応する。図1および2に示す矢印Aは、軸Rの周りのプラットフォーム32の選択的な回転を表わす。
【0025】
検知用アレイ36は多くの直線的に配置された素子38を含み、明確さを保つためにその少数だけを模式的に図示し、また符番により具体的に示してある。素子38はそれぞれ選択された帯域幅内の電磁放射を送り出しまたは受け取るように作動する。検知用アレイ36は処理サブシステム40に接続されている。サブシステム40は、アレイ36の素子38に接続された切替ツリー43を備えたトランシーバー42を含む。一つの形式では、アレイ36のプラットフォーム32に対する位置が、サブシステム40に接続された1台または複数台の位置エンコーダ(示さず)により決定される。他の形式では、1または複数の異なる位置追跡デバイスおよび/または位置決定追跡技術を用いることができる。
【0026】
トランシーバー42の制御下で、切替ツリー43により個々の素子38を選択的に駆動させることができる。素子38はそれぞれ送信または受信に専用である。素子38を、互いに背中合わせの関係に配置された一般に垂直な2列に配置する。1方の列を構成する素子38は送信専用であり、他方の列を構成する素子38は受信専用である。各列中の素子38の数は、約32〜約2000素子の範囲にあり、また軸Rに沿って約2〜2.5mの垂直距離に及ぶ;しかし、他の実施態様では、異なる垂直範囲および/または異なる数の素子を用いることができる。トランシーバー42は、一度に、送信列のただ一つの素子38で物体Bを照射し、かつ同時に受信列の1または複数の素子38で受け取るように、切替ツリー43を制御することができる。トランシーバー42は、送信列の各素子38および対応する受信列の1または複数の素子38の連続した駆動を指令するロジックを有し、アレイ36による垂直方向に沿った人22の部分の走査を行う。対応する「ダウンレンジ」あるいは「経過時間」情報を、検査中の人22の対応する部分に関する位置データを提供するために用いることができる。そのような配置に関するさらなる情報が、同一出願人所有の米国特許第5,859,609号(参照により本明細書に組み入れられる)の中で、提供される。
【0027】
好ましい実施態様では、トランシーバー42およびアレイ36の素子38は、約1ギガヘルツ〜約1テラヘルツ(約1GHz〜約1THz)の範囲(これは自由空間の約0.3メータ(m)〜約300マイクロメータ(μm)の電磁放射波長範囲に対応する)から選ばれた電磁放射を送信および/または受信するために適切な形式である。別の好ましい実施態様では、インパルス幅に依存して約200MHz〜約15GHzの範囲(これは自由空間の約1.5m〜約0.02mの電磁放射波長範囲に対応する)の周波数を生成するインパルス・トランシーバー配列を利用する。より好ましい実施態様では、周波数範囲は約1GHz〜約300GHzであり、自由空間の約0.3m〜約1ミリメータ(mm)の波長領域に対応する。最も好ましい実施態様では、周波数範囲は約5GHz〜約110GHzであり、約0.06m〜約2.7mmの対応する自由空間の波長領域を有する。
【0028】
キャリブレーションを単純化するために、送信列の所与の素子38のための送信経路を、対応する受信列の素子38の送信経路とほぼ同じ長さとするように選択することができる。それにもかかわらず、他の実施態様では、送信/受信編成が異なることが可能である。例えば、一つの他の実施態様では、1または複数の素子38を送信と受信の両方に用いる。別の代替的実施態様では、両方の手法を混合したものを利用する。通常は、アレイ36から受け取った信号は、標準技術を適用して周波数をシフトダウンし、処理可能な様式に変換する。一つの形式では、トランシーバー42が、米国特許第5,859,609号(参照により本明細書に組み入れられる)に記述されたようなバイスタティックヘテロダイン周波数変調連続波(FM/CW)型である。同一出願人所有の米国特許第5,557,283号および第5,455,590号(それぞれ参照により本明細書に組み入れられる)が、他のトランシーバー編成のいくつかの例を提供する、しかしこれらに限定されない。さらに他の実施態様においては、重複するまたは重複しない周波数範囲の種々のトランシーバー/検知素子構成を混合したものを利用することができ、それには1または複数のインパルス型、モノスタティックホモダイン型、バイスタティックヘテロダイン型、および/または当業者が思い浮かべるであろう他の型が含まれる。
【0029】
トランシーバー42は、アレイ信号に対応するデータをサブシステム40の1または複数のプロセッサ44へ提供する。プロセッサ44を、トランシーバー42から受け取ったデータの処理に適切な、ディジタル回路、アナログ回路または両方の組合せを含む任意の型の1または複数の構成要素でそれぞれ構成することができる。プロセッサ44はプログラム可能型;専用のハードウェアに組み込まれた状態の機械;あるいはこれらの組合せであってよい。複数プロセッサ形式では;分散処理、パイプライン処理および/または並行処理を必要に応じて利用することができる。
【0030】
メモリ46がプロセッサ44と共に含まれる。メモリ46は、固体形式、電磁気形式、光学形式またはこれらの形式の組合せであってよい。更に、メモリ46は揮発性、不揮発性、あるいはこれらの型の混合であり得る。メモリ46の少なくとも一部はプロセッサ44に組み入れることができる。着脱可能な記憶デバイス(R.M.D.)48もプロセッサ44に含まれる。R.M.D.48は、フロッピーディスク、カートリッジ、テープ型の取外し可能な電磁気的記録媒体;CDまたはDVD型などの光ディスク;電気的に再プログラム可能な固体型の不揮発性メモリ、および/または、当業者が思い浮かべるであろう様々な種類でありうる。さらに他の実施態様では、R.M.D.48は存在しない。
【0031】
サブシステム40を、プラットフォーム32の回転をプロセッサ44および/またはトランシーバー42によって選択的に制御するために、モーター34に連結する。サブシステム40を、1または複数のオペレータ入力デバイス52および1または複数の表示デバイス54をさらに含む監視/制御ステーション50に収容する。オペレータ入力デバイス50にはキーボード、マウスまたは他のポインティングデバイス、音声認識入力サブシステム、および/または、当業者が思い浮かべる種々のデバイスが含まれ得る。オペレータ表示デバイス52は、ブラウン管(CRT)型、液晶ディスプレイ(LCD)型、プラズマ型、有機発光ダイオード(OLED)型、または当業者が思い浮かべるような他の型であり得る。ステーション50を、本明細書に以下にさらに記載するようにシステム20の操作に責任を負う1または複数の検問所オペレータによりコントロールされるように編成する。
【0032】
システム20は、通信リンク62によりサブシステム40につながれた通信サブシステム60をさらに含む。サブシステム60は、コンピュータネットワーク70に接続されたネットワークサーバー63を含む。コンピュータネットワーク70を私用型かまたはインターネットなどの公的にアクセス可能な型のいずれかのローカルエリアネットワーク(LAN)、都市域ネットワーク(MAN)、および/または広域ネットワーク(WAN)の形で提供することができる。リンク62はそのようなネットワークにより提供されるかまたは専用の通信チャネルの種類であり得る。サーバー63は、サブシステム40から遠くに設置することができる。実際、一つの実施態様では、サーバー63を、対応する門30を有する、多くの遠くに設置されたサブシステム40に接続する。また他の実施態様では、2以上のサーバー63を、共通の門30およびサブシステム40の編成に接続することができる。あるいはまたは加えて、サーバー63はサブシステム40に組み込まれた一部であってもよい。さらに他の実施態様では、サーバー63、ネットワーク70、およびサイト80は存在しない。実際、R.M.D.48を、サブシステム40と他の計算/処理デバイス間のデータ転送のために、代わりにまたは追加して使用することができる。
【0033】
サーバー63はネットワーク70を通じて通信するように操作可能である。コンピュータネットワーク70が、通信により多くのサイト80を互いに連結する。サイト80はそれぞれ、コンピュータネットワーク70と通信できるように接続して配置されたコンピュータ82を有する。各コンピュータ82は、1または複数のオペレータ入力デバイス50および、サブシステム40用に以前に記述したような1または複数のオペレータ出力デバイス52(明確さを保つために示さない)を含む。各サイト80のデバイス50および52が、オペレータ入力および出力(I/O)機能を選択的に提供する。コンピュータ82は、別のサブシステム40、パーソナルコンピュータまたはコンピュータ・ワークステーション、別のコンピュータサーバー、個人用携帯情報端末(PDA)、および/または当業者が思い浮かべることのできる種々の構成の形にすることができる。明確さを保つためにサイト80の2つのみを図示したが、コンピュータネットワーク70を介してより多くまたはより少しと連結することができることを理解するべきである。
【0034】
サーバー63、コンピュータネットワーク70およびサイト80がまとまって、ステーション50と遠隔通信する装置を提供する。これらの構成部分の相互接続は、有線、無線、または両方の組合せであってよい。ネットワーク70の代わりにまたはそれに加えて、サイト80およびサーバー63の1または複数を専用配線その他により連結することができる。ネットワーク70を通じた通信を、ステーション50の性能を監視し、サブシステム40に関連するソフトウェアを更新し、ステーション50または門30を遠隔操作し、および/またはより十分に以下に述べるように疑わしい物体の認識に関するデータをシステム20と共有するために用いることができる。そのような編成の1つでは、1または複数のサイト80を、システム20によるセキュリティ検査に関するデータの保存場所として構成する。
【0035】
図3のフローチャートをさらに参照して、操作システム20の一つのモードをプロシージャ120として説明する。プロシージャ120をシステム20により遂行して、物体25を携帯する人22を表す画像情報を提供する。プロシージャ120は操作121から始まる。操作121では、人22が、検問所の門30に入り、武器、密輸品および/または他の品目/物品を審査される。プロシージャ120は、検査インデックス「I」を1にセットする(I=1)初期化操作122に続く。操作122から、プロシージャ120が検査ルーチン130で始まる検査ループ124に入る。検査ルーチン130が、人22がプラットフォーム32上で回転するときに、アレイ36の視野内の人22の一部分を検査する。インデックスIは、プロシージャ120の一部として行なわれる種々の検査ルーチン130の数に対する整数インデックスである。
【0036】
図4を参照して、さらに検査ルーチン130を説明する。ルーチン130は、送信インデックスNを1にセットする(N=1)初期化操作132から始まる。操作132から、送信/受信操作136に始まり素子を順番付けるループ134に入る。インデックスNは、ルーチン130で行なわれた送信/受信操作136の数に対する整数インデックスである。操作136では、アレイ36の送信素子第「N」番の視野に入っている人22の一部分を電磁放射により照射し、1または複数の対応する受信素子が送信に反応して反射された電磁放射を集める。送信および受信素子は、前に述べたように切替ツリー43を備えたトランシーバー42のロジックにより選択される。操作136から、ルーチン130が条件文138に進む。これは、送信素子第「N」番が送信しなければならない最後の素子かどうか(N=LAST?)テストする;ここでLASTは、トランシーバー42によって作動される送信素子の総数である。
【0037】
一つの形式では、ルーチン130のそれぞれの実行のために、送信素子「N」が選択された周波数範囲を2度掃引し、2度の掃引のそれぞれに対応する後方散乱情報を異なる受信素子で受取る。送信素子を受信素子に対して少しずつずらして配列して、送信素子Nの位置がアレイの共通軸に沿った2つの受信素子間の点に合致するようにすることができる。米国特許第5,557,283号(参照により組み入れられる)が、送信および受信素子のこの配置の例について記載している。他の形式では、より多くのまたはより少ない掃引、種々の型の掃引、および/または種々の送/受信方向および数、を含む異なる技術を利用することができる。
【0038】
条件文138のテストが否定(N<LAST)である場合、次にインクリメント操作142を実行して、Nを1だけインクリメントする(N=N+1)。ループ134は、操作142から新しくインクリメントされたNの値に対応する素子38の送/受信サブセットを実行する送/受信操作136に操作142から戻る。このようにして、素子38をトランシーバー42によりアレイ36に沿った垂直経路で作動させて、人22の隣接する領域に沿ってデータを提供する。
【0039】
トランシーバー42により得られる検査情報の解像度を、各操作136の間に選択された極めて広い周波数範囲に及んで直線的に掃引することにより、向上させることができる。一つの好ましい形式では、トランシーバー42が、各操作136の実行について、少なくとも10GHzの範囲に及んで掃引する。この掃引は、例えば約10GHz〜約20GHzの範囲に及ぶ場合がある。より好ましい形式では、トランシーバー42および素子38を16GHzの掃引範囲に設定する。この掃引は、例えば約24GHz〜約40GHzの範囲で起こる場合がある。一つの最も好ましい形式では、距離分解能が一般に方位分解能と同じになるような極めて広い掃引範囲を選択する。これらの形式では、素子38を、傾斜溝またはエンドファイアアンテナ型を含み、それらに限定されない、選択された掃引範囲にふさわしい周波数応答を有する型となるよう選択する。別の形式では、送信素子は、所与の周波数範囲(10GHz〜20GHzなど)を、ある場合に周波数ホッピングとして知られている---擬似ランダム順序で掃引することができる。
【0040】
ループ134は、トランシーバー42の制御下で、アレイ36の所望の送信/受信素子38を順番に辿り、LAST回数だけ繰り返される。条件文138のテストが真である場合、肯定の分岐はデータ操作144に進む。操作136を実行した結果得られるデータは、トランシーバー42により、プロセッサ44に提供される。データ操作144では、操作136をN=1からN=LASTまで繰り返して実行することを通じて集められた情報について検査データセットを確立する。このデータセットは、整数インデックスIの現在値、およびこれらの実行の間に照射された部分に対応する。最初は、検査データセットはトランシーバー42、プロセッサ44または両方により蓄積され組織化されることが可能である;そしてその後、プロシージャ120の残りの部分に関連して記述したようにプロセッサ44によりさらに処理されるために、メモリ46に記憶される。操作144から、ルーチン130はプロシージャ120の次の段階に戻る。
【0041】
図3に返って参照し、プロシージャ120は、インデックスIの最終値に達したかどうか(I=TOTAL?)をテストする条件文152へと続く;ここでTOTALは、プロシージャ120に対して望まれるループ124(およびルーチン130)の実行の総数である。条件文152のテストが否定の場合(I<TOTAL)は、プロシージャ120は、インデックスIを1だけインクリメントする(I=I+1)インクリメント操作154を続ける。ループ124はその後、IがインクリメントされてTOTALと等しくなるまで、次の実行のためにルーチン130に返る。
【0042】
TOTAL回数だけループ124が実行されると、TOTALの数の検査データセットがメモリ46に記憶される。条件文152のテストが真の場合、プロシージャ120は円筒状区分化の操作160に移る。操作160では、検査データセットをプロセッサ44で処理し、それぞれが円筒Cの円弧区分に対応する多くの円筒状の画像データセットを生成する。図2を参照して、円弧区分S1は、人22に対して約90度の視角Vを張る。円弧区分S1が、軸Rに沿って伸びる円筒状の開口部CAを定義する。円弧区分S1に対応する画像データセットが、あたかも円筒状の開口部CAを通して見るかのように、選択された電磁放射を反射する物体Bの三次元の表面を表わす。一つの便利な形式では、これは任意の三次元の座標系を用いることもできるのであるが、円柱座標によって画像データセットを定義する。各画像データセットは、対応する円弧区分について集められた検査データからプロセッサ44により決定される。円筒状のイメージデータの決定に関するさらなる記述については、同一出願人が所有する米国特許第5,859,609号(参照により本明細書に組み入れられる)が参照される。
【0043】
操作160の間に、軸Rの回りの多数の円弧区分(あわせて人22の回りを囲む)に対して、円筒状の画像データセットを決定する。図5に、重複する8個の円弧区分、S1、S2、S3、S4、S5、S6、S7、およびS8(まとめて区分S)を、一般に円形の経路Pおよび対応する円筒Cに関連させて図示する。明確さを保つために、区分S1、S3、S5およびS7を、双頭の矢印によって経路Pのわずかに外側に模式的に表わし、また区分S2、S4、S6およびS8を、双頭の矢印によって経路Pのわずかに内側に模式的に表わす。図5では、区分Sは各々約90度の視角に対応し、また各1つが他の2つに約45度重複する。異なる区分Sがそれぞれ、人22の異なる部分の表現に対応することを理解するべきである。他の実施態様では、視角が異なることが可能であり、および/または一つの円弧区分Sとその次の区分が同一でなくてもよい。あるいはまたは加えて、重複は断続的でもよく、または存在しなくてもよい。
【0044】
プロシージャ120はマッピング操作162へと続く。操作162において、プロセッサ44が、周りの円弧区分Sに対して得られた画像データを、物体Bの共通表面へマッピングし、これが、次に物体Bの共通体積を定義する。操作162は、ある区分Sの与えられた位置に対するデータ点であって、別の円弧区分Sに対する同じ位置のデータ点から閾値量だけ異なるデータ点の照合調整を含み得る。一つの実施態様では、平均化技術を用いて中間データ点を内挿する。別の実施態様では、対応する円弧区分Sの中点からのデータ点の距離の増加につれて、そのデータ点の寄与を次第に減少させる重み関数を利用する。円筒形のデータセットを、好ましくは、画像中の不適切な位相干渉を減少させるために、ばらばらに(大きさを計算した後)組み合わせる。操作162が、ルーチン130の検査に用いられた電磁放射を反射する物体Bの地形図的表現および軸Rの回りの表面によって境界付けられる体積を提供する。
【0045】
プロシージャ120は操作164に進む。操作164では、1または複数の画像データセットがプロセッサ44により、操作162によって提供される物体Bの地形図的表現から決定される。これらの二次元画像データセットは、所望の視角から二次元平行電磁線投射を行なうことにより、物体Bに対する体積表現データから生成される。各平行電磁線は、それが出会う体積表現中のデータに比例して強度が減弱される。減弱後に、対応する電磁線に対して画像ピクセル強度を表わすための最大ボクセル強度を選択する。表現の裏面が描画に寄与しないように、減衰率を調節する。一般に結果はそれぞれの選択された視角に対する画像ピクセル強度の二次元マップである。強度マッピングに加えて、検査対象の他の特性をマップすることができる。例えば、検査アレイ36から対象の選択された領域までの距離を、特有の画像マップを生成するために用いることができる。一つの実施においては、距離を、指定された参照位置に関する検査対象の反射表面の相対深度マップを生成するために用いることができる。具体的には、距離(深度)を、送信と返された電磁エネルギーの検知の間の時間的遅れの差から決定することができる。一つの特定の形式では、「ピクセル化された」深度の画像マップが、強度に基づいた画像マップ用の最大強度ピクセル位置と同じ参照位置に関するそのような距離情報(「深度ピクセル」)から与えられる。この実施例を、さらに図6のルーチン170aに関連して以下に考察する。
【0046】
二次元画像(マップ)データセットをそれぞれ、対応する画像をデバイス52により必要に応じて表示するために用いることができる。一つの実施態様では、種々の視角からの多数の二次元画像を、操作164の体積表現から与える。これらの画像を、物体Bの動画を提供するために選ばれた順序で提示することができる。一つの形式では、一連の約32〜約64の普通は等間隔に置かれた軸Rの回りの画面を、物体Bの軸Rの回りに回転する動画を生成するために用いる。他の実施態様では、1または複数の二次元画像/マップを表示するデータを、中間で地形図的表現を形成することなく、決定することができる。対象を走査するために平面形状アレイを利用するシステムが、例えば図14および15に関連して以下に述べるシステムなどが、二次元画像/マップデータの直接生成に、特に適している。さらに他の実施態様では、画像表示を、概略的に登録して単に部分的に示してもよいし、および/または疑わしい物体の検知に応じて次に完全に記述する。
【0047】
操作164から、プロシージャ120は物体検知操作170を引き続いて実行する。操作170では、人が安全上の脅威となるものなど1または複数の関心対象の物体を携帯しているかどうかを決定する。これらの物体は人22の衣服により完全にまたは部分的に隠蔽されている可能性がある。一つの形式では、操作164で描写された1または複数の画像の点検によって決定が最初に行なわれる。あるいはまたは追加して、画像データの数値処理を、人22が図1に示した隠蔽された物体25などの1または複数の疑わしい物体を携帯しているかどうかを判断するために行なう。そのような数値的な技術の例について(それには限定されないが)、さらに図6〜10に関連して以下に記述する。操作170の後に、条件文195が、疑わしい物体が表示されたかどうかをテストする。条件文195のテストが否定(偽)の場合、プロシージャ120は停止する。条件文195のテストが肯定(真)の場合、プロシージャ120は操作200へ移る。操作200では、疑わしい物体の存在をオペレータに伝達する。
【0048】
この伝達は、操作164で生成された疑わしい物体に関連したいくつかまたはすべての対象の画像を表示することを含むことができる。オペレータの注意を、点検をうけている人および/または対応する画像に集中するために、視覚的および/または聴覚的警戒信号を、操作200において生成することができる。任意で、疑わしい画像の特徴を、識別する色、明滅/点滅または他の強度変化等の視覚的な特徴によって強調することができる。この表示に基づいて、オペレータは、さらなる点検が正当であるかどうか、危険人物などとして人22を拘留するべきかどうかを決定することができる。追加してまたは代わりに、オペレータの考察のためにテキストまたは図形中に物体の分類および検知に関係する情報を表示することができる。別の選択枝として、人および/または疑わしい画像領域の種々の画面を同時に表示することができる。さらなる変形では、オペレータが入力デバイス52を用いて、種々の画面の間を切り替えることができ、および/またはズームイン、またはズームアウトして表示されている画像の相対的なサイズを変更することができる。さらに他の実施態様では、検知基準を望むように改良するために擬似アラームを用いることができる。
【0049】
プライバシー異議が唱えられる可能性がある身体特徴を隠す/隠蔽するために、人の身体を、シルエット、マネキン、ワイヤフレーム体、その他の性的に中立な表現などの模式的身体画像として、および/または人の可視光範囲写真またはビデオ表現として表示することができる。そのような身体表現においては、これに対して置かれた任意の疑わしい物体のオーバーレイをオペレータが視認するために表示することができる。代わりにまたは追加して、疑わしい物体が携帯されている可能性があるかどうかを少なくとも部分的に評価するために人22の身長に沿って得られた断面画像を点検することにより、プライバシー問題に対応することができる。断面画像化を行う一つの方法が、さらに米国特許第6,507,309号(参照により本明細書に組み入れられる)に記載されており、それは代わりに、断面に切られた領域についての大きさの情報、例えば周長などを収集することを目標にしている。断面図の他の創造的局面を、図13に関連して以下に図示する実験例に関連してさらに記述する。
【0050】
さらにプライバシー異議が出る可能性のあるオペレータの点検画像量を減少させるために、操作170中の数値的処理方法を用いて、どの画像をオペレータに提示すればよいかを -- 具体的にはそのような処理により疑わしい物体の存在が示された画像のみを --最初に識別することができる。したがって、オペレータは、武器または密輸品などの1または複数の関心対象の物体を表示していると指摘された画像のみを検討し、プライバシーの懸念が、完全に除去することはできないにせよ、少なくとも合理的に減少される。さらに他の実施態様では、衣服の下の身体画像の表示は、条件付きでまたは無条件に許容できるか、または全く存在しない可能性がある。代わりにまたは追加して、サブシステム40によって集められた情報を、コンピュータネットワーク64を介して1または複数の遠隔サイト80へ送る。サイト80が、プロセッサ44の代わりに、プロシージャ120のデータ処理のうちの幾つかまたは全てを行なうことができる。一つのプロセスでは、門30が非侵襲的に服を着ている個人を走査し、画像情報を、サーバー63およびネットワーク70を介して指定のコンピュータ82へ送る。代わりにまたは追加して、サーバー63およびネットワーク70によって関心対象の物体を携帯している人に関する経歴情報にアクセスすることができる。
【0051】
操作200の実行後、プロシージャ120が終了する。さらに、条件文195が否定の場合、プロシージャ120は操作200を迂回して終了する。プロシージャ120は、所与の検問所を通り抜ける各人のために繰り返すことができ、および/または結果が曖昧に見える場合は、所定の人のために複数回繰り返すことができることを理解するべきである。
【0052】
数値的処理ルーチン170aおよび170bについて、さらに図6〜10に関連して記述する。ルーチン170aおよび/または170bを、プロシージャ120と同じ様式で、またはそれの一部分として、システム20により実行することができる。特にルーチン170aに関して、強度および深度を人間の対象が携帯している人工物体を識別するために用いることができることが発見された。一般に、武器または密輸品として用いられる型の人工物体は平らな面と鋭いエッジを持っていることが多く、通常はより滑らかで湾曲した人間対象の表面とは、200MHz〜1THzの範囲に1または複数の周波数を有する反射された/返された電磁エネルギーにより提供される強度および深度マッピングに基づいて区別することができる。ルーチン170aはこの発見を実行する一つの実施態様である。
【0053】
ルーチン170aでは、任意の他の検知方法の代わりにまたは追加して、操作170において画像データの数値処理を行い、人22の衣服の下に携帯されている武器および/または密輸品など -- 1または複数の疑わしい物体が存在するかどうかを決定する。図6を参照して、ルーチン170aをフローチャートの形で示す。ルーチン170aは、操作172aで画像カウンタFを1に設定すること(F=1)により始まる。カウンタFが、ルーチン170aでの処理のために、操作162から得られる隣接した画像にインデックスを付ける。最初、ルーチン170aは、以前にプロシージャ120の操作164に関連して記述した型の2つの異なる二次元画像データマップを生成する。これらは:(a)最大ピクセル強度に基づいた地形図的表現から導かれる二次元マップ(強度マップ)、および(b)距離情報から決定される反射表面の相対深度に基づいた二次元マップ(深度マップ)、である。
【0054】
各画像マップFに対して、ルーチン170aが、カウンタKによりインデックスを付けられたカーネル操作においてそれぞれ別々に評価される多くのより小さな画像部分を選択する。各画像マップカーネルKがそれぞれ、強度マップおよび深度マップから得られる一群の画像ピクセルに対応する。画像ピクセルのこの群は2枚のマップの各々において同じ相対的位置を有する。操作174aで、カーネルインデックスカウンタKを1にセットする(K=1)。操作174aから、ルーチン170aが操作176aに進む。操作176aでは、現在の画像FのカーネルKを処理のために選ぶ。
【0055】
操作176aから、ルーチン170aは操作178aへと続く。操作178aでは、カーネルKの深度マップに差分演算子を適用して、対応する深度差分マップを提供する。具体的には、この差分演算子が、差分演算を用いることにより二次元深度マップの微分を近似する。他の形式では、微分演算子を同様に利用することができよう。本明細書で用いる、マップまたは画像に対する「深度差分」とは、深度マップに適用された連続的微分演算および/または離散的差分演算の結果を指すものである。従って、深度の関数として行なわれる演算は、より特殊な深度差分の関数として行なわれる演算を包含している(しかしこれに限定されない)と理解すべきである。
【0056】
操作178aから、ルーチン170aは操作180aに進む。操作180aでは、カーネルKの強度マップおよびカーネルKの深度差分マップからの入力が、適応的な処理用のニューラルネットワークの対応する入力に供給される。一つの形式では、抽出された特徴を、ニューラルネットワークの多層パーセプトロン形式中に入力する。ネットワークが、エラーアルゴリズムの逆伝播などの繰り返しの訓練過程により、物体識別用に構成される。さらに他の実施態様では、異なる型のニューラルネットワークおよび/または訓練技術を追加してまたは代わりに利用することができる。またさらなる実施態様では、ファジイ論理、オペレータが支援するエキスパート学習システム等の異なる型の適応処理技術を、ニューラルネットワークに追加してまたは代わりに利用することができる。さらに非適応的処理を、代わりにまたは追加して利用することができる。さらに、いくらかのまたはすべての所望の深度差分情報を、直接の深度変化マップ情報の入力に基づいて、操作178aの代わりに元来操作180aが処理することができること、および/または深度に依存する異なる関数を、当業者に既知の技術を用いてニューラルネットワークに入力することができること、を認識するべきである。代わりにまたは追加して、強度画像情報に依存する異なる関数をニューラルネットワークへ、いくつかのまたはすべての直接の強度マップ情報の代わりに、当業者に既知の技術を用いて入力することができる。
【0057】
一つの特定の形式では、7×7ピクセルのカーネルサイズを、深度および強度データの両方のために利用する。この配列については、これまで利用されてきたパーセプトロンニューラルネットワークの一つの形式は、98の入力(2つの入力源のそれぞれからの7×7=49ピクセル、総計49×2=98の入力を供給する)を有する4層を含んでいた。このネットワークは、最初の隠された層に140のニューロンを、第2の隠された層に25のニューロンを、また2つの出力を含んでいた。これらの出力は:(1)人工物体として識別可能な、および(2)人工物体として識別不可能な、クラスを表わす。「人間」の属性の識別に対応するクラスなどの、他のクラスを含むことができるであろう。実施した実験において、ニューラルネットワークが、強度および深度差分をマップする49ピクセルの領域を両方とも同時に検査して、人工物体がカーネルウィンドウ内にあったかどうか決定した。処理する各カーネルKについては、操作181aにおいて出力を閾値と比較し、個別の結果を提供する。この閾値を、誤警報率、検知率等に基づいて手動でおよび/または動的に調節することができる。
【0058】
操作180aから、ルーチン170aは、カーネルKが解析を必要とする所与の画像の最後(FINAL)のカーネルかどうかをテストする条件文182aに進む。NOであれば、条件文182aからの否定(偽)分岐は操作部183aに進み、Kをインクリメントする(K=K+1)。操作183aから、ルーチン170aが、ループ184aによって操作176aに戻り、画像Fから得た次の強度カーネルKおよび深度カーネルKを処理する。ループ184aの各実行に対して、カーネルKが異なるピクセル群に変わる;しかしながら、1または複数のピクセルが2以上のカーネルKに含まれていて、ある程度の重複があってもよい。他の実施態様では、一つのカーネルKから次のカーネルKへ1または複数のピクセルをスキップしてもよい。さらに他の実施態様では、カーネルKのピクセル構成がニューラルネットワーク出力の性質に依存してもよい。一つの特定の実施例において、疑わしい物体が適応的な処理により表示された場合、および/または、選択したカーネル処理を再構成して、そのような物体を表示している任意のピクセルの近くの以前にスキップしたピクセルを処理する場合は、カーネルK間の重複の程度を増加させる。
【0059】
2つのマップの種々のカーネルKがニューラルネットワークによりループ184a中で処理されるため、操作181aにおいて、閾値出力結果が蓄積され、対応する適応的に処理された画像マップを検知された何らかの疑わしい人工物体の個別の表示と共に供給する。この画像マップは各カーネルKの出力に対応しており、したがって画像マップはカーネルを定義するために用いられる技術に依存する解像度を有している可能性がある。さらに、ループ184aが一度に一つのカーネルKを処理する一方で、他の実施態様では2以上のカーネルを平行して処理することができること、および/または、種々のカーネルサイズまたは構成を用いることもできることを理解するべきである。もし条件文182aのテストが、画像Fについて最終のカーネルKが処理されたことを示す場合は、次に条件文182からの肯定(真)分岐は、操作187aに進む。
【0060】
操作187aでは、1または複数のフィルタを適用して、誤警報および/または誤否定を、ループ184a中の種々のカーネルKの反復処理によって、画像Fに供給される得られた適応的処理された画像から取り除く。一つの形式では、各ピクセルをその隣接ピクセルの中央値に置き換えるメディアンフィルタを適用して、一般に雑音によって生成される可能性のある単一異常ピクセルを除去する。代わりにまたは追加して、1または複数の形態フィルタを利用して画像の構造を変更してもよい。そのような形態フィルタは膨張型および/または浸食型を含むことができる。本明細書で用いる「膨張フィルタ」は空隙を満たすことにより物体を厚くし、そして「浸食フィルタ」は迷子のピクセルを減らすことにより物体を薄くする。一つの特定の実験実施例において、始めに浸食フィルタ操作そして次に膨張フィルタ操作を生成する種々の設定で、一連の3〜4枚のフィルタを利用した。
【0061】
操作187aから、複数のフレームを特定のタイプの画像技術に利用することが可能かどうかのテストをする条件文188aに出会う。特に、複数のフレームが一般にプロシージャ120により生成され、条件文188aに肯定(真)の結果を与える。この肯定分岐から、疑わしい物体位置を一つのフレームから次のフレームへと比較して、疑わしい人工物体が隣接するフレームで見つかった場合には、物体検知を確認する手段を提供する操作189aに進む。フレームからフレームへのチェックが、検知された物体を条件文190aで確認する場合、ルーチン170aは、条件文190aの肯定(真)分岐から操作192aに進む。操作192では、これに続くプロシージャ120の操作200での処理のために、疑わしい物体の位置を人22の画像マップに対して相対的に記憶する。フレームからフレームへの検査に一貫性がない場合は、条件文190aのテストは否定(偽)であり、ルーチン170aは条件文194aに進む。さらに、複数フレームが利用可能でない、および/またはフレームからフレームへの検査が望まれない実施態様については、条件文188aのテストは否定(偽)であり、ルーチン170aは無条件に操作192aに進む結果になる。
【0062】
条件文194aは、すべての画像Fを処理したかどうかテストする。条件文194aのテストが否定(偽)の場合、操作195aでインデックスFをインクリメントし(F=F+1)、ルーチン170aはループ196aにより操作174aに戻り、次の画像Fのカーネルからカーネルへの解析を繰り返す。画像をすべて解析した場合、次に条件文194aの肯定の分岐に進み、ルーチン170aは停止して、その呼出しルーチン(プロシージャ120など)に戻る。
【0063】
ルーチン170aに追加してまたはその代わりに、ルーチン170bに従って操作170で画像データの数値処理を行ない、人22の衣服の下に携帯されている武器、密輸品などの1または複数の疑わしい物体が存在するかどうかを判断することができる。図7を参照し、ルーチン170bをフローチャートの形で示す。ルーチン170bは、操作172bで、イメージカウンタFを1にセットすること(F=1)により始まる。カウンタFが、ルーチン170bで処理するために、操作164から来る隣接した画像にインデックスを付ける。操作172bから、ルーチン170bが操作174bに進む。操作174bでは、現在の画像Fを区分化するかまたは多くの部分へ分割する。
【0064】
追加して図8を参照して、3つの隣接する欄に長方形の画像領域IRを図示する。左端の欄で、画像領域IRを、0〜17の番号を付した画像部分の第1のセット、セット1、へ区分化する。中央の欄で画像領域IRを、18〜27の番号を付した画像部分の第2のセット、セット2、へ区分化する。図8の右端の画像部分IRの表示の重ね合わせたセットで図示されるように、画像部分0〜17は画像部分18〜27と重複する。一つの実施態様では、区分のサイズを、関心対象の一般的な物体の型を表示するために必要な大部分の領域を含むことができるほど十分に大きく、しかしその物体の位置を定めることを困難にするほどには大きくないように選択する。Ku帯の電磁放射を利用する一つの編成では、約32×32ピクセルの区分サイズが望ましいことが判明した。それにもかかわらず、他の実施態様では、重複部分を有するまたは有しない、他のサイズ、形状、パターン、均一度、および/または種々の属性を、当業者が思いつくように変えてもよい。
【0065】
図7に戻って参照すると、ルーチン170bは操作176bへと続く。操作176では、各区分の画像データをフーリエ空間の周波数空間へフーリエ変換する。操作176bをサブシステム40により行ない、各画像区分に対応する空間周波数表現を与えることができる。通常は、そのような表現は複素数値である。人工物体はしばしば、人体などの自然物に比べて、通常は高周波の空間周波数をより高いパーセンテージで有する空間周波数表現を有していることが分かっている。さらに、人工物体に対する空間周波数表現は、フーリエ空間上の空間周波数分布において一定方向において支配的になる傾向がある。そのような特徴を、人工物体を明らかにした疑いのある画像部分を分類するために利用することができる。
【0066】
フーリエ変換演算により提供される型の空間周波数情報は通常、複素数値を含んでいるので、多くの場合物体検出手順の一部としてデータを単純化することが望ましい。操作178bでは抽出器を適用して、人工物体を示している可能性のある空間周波数表現から特徴を抽出する。図9をさらに参照して、3つの異なる特徴抽出器、FR1、FR2、FR3を、フーリエ空間に関して概略形式で図示する。特徴抽出器FR1は、フーリエ空間のゼロ(0th)周波数成分を中心とする楔形半平面およびリング状半平面を含むリング−楔構成である。この抽出器については、楔がスケール不変性を与え、またリングが回転不変性を与える。抽出器FR2はセクター構成である。各セクター内で空間周波数を積分することにより、対応する画像区分の角度方向および半径方向の様相を表わす1組の特徴を生成することができる。不変ではないが、抽出器FR2を、好ましい方向および/またはサイズを有する物体を識別するために利用することができる。抽出器FR3はリング構成であり、それは回転不変であって、したがって半径方向の空間周波数成分に基づいた区分を表わす。操作178bでは、これらの抽出器型(FR1、FR2、FR3)の1または複数を適用することができ、および/または異なる型の抽出器を利用することができる。さらに他の実施態様では、この段階の抽出は存在しなくてもよい。
【0067】
操作180bでは、操作178bの間に抽出された特徴を、サブシステム40で定義されたニューラルネットワークに入力する。一つの形式では、抽出された特徴をニューラルネットワークの多層パーセプトロン形式に入力する。物体識別のためのネットワークが、過誤アルゴリズムの逆伝播などの反復する訓練過程により構成される。さらに他の実施態様では、異なる型のニューラルネットワークおよび/または訓練技術を、追加してまたは代わりに利用することができる。べつのさらなる実施態様では、ファジイ論理、オペレータが支援するエキスパート学習システム等の異なる型の適応処理技術を、ニューラルネットワークに加えてまたはその代わりとして、利用することができる。代わりにまたは追加して、非適応的処理を利用することができる。
【0068】
操作180bから、ルーチン170bは、操作174b〜180bに従ってイメージをすべて処理したかどうかテストする条件文182bに続く。もしそうでなければ、操作184bでカウンタFにインデックスを付け(F=F+1)、ループ186bが次の画像を処理するために操作174bに戻る。条件文182bが肯定の場合は、ルーチン170bは操作188bに進み、ループ186bから種々の画像フレームに対して得られた結果を比較し、それらが互いに矛盾がないかどうかを判断する。円弧区分Sに関する一つの非制限的実施例において、円弧区分S1およびS2に対する画像結果を、それらが重複する程度まで互いに比較することができた(図5を参照)。同様に、円弧区分ペアS2とS3、S3とS4、S4とS5、S5とS6、S6とS7、S7とS8、およびS8とS1に対する重複する画像結果を、一貫性について、操作188bの間に比較することができる。他の実施態様では、より多くまたはより少数のフレームの比較および/または異なるフレームからフレームへの比較を行うことが出来る。さらに別の実施態様では、フレームからフレームへの比較は全く行われない。
【0069】
操作188bから、条件文190bに進み、そこでフレーム照合の結果および/または1または複数の他の望ましい検知閾値/判定基準が、関心対象の物体を示しているかどうかをテストする。そのような物体が示される場合には、人に対する相対的位置および物体画像データを操作192bで記憶する。条件文190bのテストが否定であれば、ルーチン170bは操作192bを迂回して戻る。操作174b〜180bおよび188bのうちのいずれか、および/または条件文190bの作業に、処理結果を1または複数の閾値または他の基準と比較して、対応する画像、画像部分または表現、画像特徴またはその他が、関心対象の物体を示しているかどうかを決定することが含まれ得ることを、理解するべきである。そのような基準は、本来静的または動的であり得る。動的な基準は、オペレータが調整可能なもの、適応的に機械が調整するもの、および/または当業者が考え付くであろう様々な技術により選択的に変更されるものでよい。図3に戻り参照すると、一旦ルーチン170bが完了すれば、プロシージャ120は条件文195に、そして1または複数の疑わしい物体が検知された場合、操作200に進むことができる。
【0070】
図10は、物体検知アレンジメント200をブロック図の形で図示する。アレンジメント200をシステム20により実現することができる。システム200では、符番202によって一般的に示されるように、所与のトランスデューサアレイ用の新しいデータ、ベースラインデータおよび均等化データを、プリプロセッサ204に入力する。プリプロセッサ204の出力はさらに、検査中の対象に関する内部画像データを生成することができる画像生成部206に提供される。この内部画像データを、グレイ階調のコンピュータで生成された形であるイメージ206aとして表示する。この内部画像データを、プライバシー問題のために表示しないこともできるし、および/または、以前にプロシージャ120に関して述べたように、性に基づく特徴を覆い隠す方法で提示することもできることを理解するべきである。
【0071】
生成部206によって提供される内部画像データは、さらに操作部208に含まれるニューラルネットワークIに提供される。ニューラルネットワークIは、ルーチン170aに関連して以前に述べたように、強度および深度差分情報に基づいて物体の存在を決定するように構成される。一つの形式では、操作部208を、図6に関連して以前に述べたルーチン170aを実行して、人工物体の可能性または構造的特徴を検知するように編成する。操作部208に加えて、画像データをさらに、操作部210に含まれているニューラルネットワークIIに提供する。操作部210を、場合によってはある型の爆発物を含むある型の誘電体材料を表している画像中の斑点を検知するように編成する。更に、生成部206からの画像データを、操作部212に含まれるニューラルネットワークIIIに供給する。操作部212は、空間周波数情報に基づいた人工的構造の特徴の検知を目標とする。一つの形式では、ニューラルネットワーク212を以前に図7〜9に関連して述べたルーチン170bを実行するように編成する。操作部208,210および/または212の出力を、ルーチン170aおよび/または170bに関連して述べたフィルタなどの様々なフィルタ214に供給して、1または複数の疑わしい物体の存在を示す出力を提供する。もし検知されれば、物体の視覚的な表現を性的に中立なシルエット表示上にオーバーレイすることができる。一つの形式では、そのような物体に対応する領域を、対照的な色、色調、陰影で、または以前にプロシージャ120について述べたものなどの他の手段によって示す。画像214aは、グレイ階調のコンピュータで生成したそのような出力例である。画像214aでは、2つの疑わしい物体が、領域215の対照的なグレイ階調の陰影により表示されている。
【0072】
アレンジメント200を、以前に述べたような様々なハードウェアおよびソフトウェア技術により、システム20で実現することができることを認識するべきである。更に、ニューラルネットワーク208、210、および212を直列にして示したが、それらを平列または直列/平列の組合せで、ならびに当業者に考えられる様々な他の方法で、配列してもよい。確かに、プロシージャ120、ルーチン170a、ルーチン170b、および/またはアレンジメント200の1または複数の操作を実行するために用いることができる、他の多くの構造的な実行系およびシステムが存在する。
【0073】
図1のシステム20に戻ってこれを参照し、トランシーバー42およびプロセッサ44は、プロシージャ120、ルーチン170a、ルーチン170b、アレンジメント200、および/またはこれらの変形に関連して記述したものを含めて、本明細書に記載する各種の操作を行なうように編成することができるロジックを含む。このロジックは、ほんの少数を挙げれば、ソフトウェアプログラミング命令、ファームウェア、および/またはハードウェアに組み込まれた形をとることができる。更に、そのようなロジックは、メモリ46、R.M.D.48および/またはコンピュータネットワーク70の1または複数の部分が所持する1または複数の信号の形をとることができる。一つの実施例では、1または複数の操作を行なうロジック信号が、プロセッサ44に/から、ネットワーク70を介して伝送される。代わりにまたは追加して、プロセッサ44用のプログラミングがR.M.D.48および/または1または複数の他の記憶デバイスを通じて輸送または伝播される。プロシージャ120、ルーチン170a、ルーチン170b、および/またはアレンジメント200(関連するロジックを含む)の操作を実行することができる他のシステムの非限定的な例には、図11〜18に関連して下記のように記述するものが含まれる。
【0074】
図11および12が、プロシージャ120、ルーチン170a、ルーチン170b、および/またはアレンジメント200に関して記述した1または複数の操作を行なうために用いることができる本発明のさらなる実施態様のシステム220を図示する。システム220は、システム20に関連して記述した事情で選択された電磁放射により人222を照射する。システム220については、人222が、ファントム画法で示される物体225を隠蔽している衣料品を着用している。以前に記述したシステム20の実施態様のように、システム220は生物でない物体の検査に同様に使用することができる。システム220は、検問所231で走査門230を定める2重の貝殻型のパネル238を含む。
【0075】
システム220はまた、通常は1人または複数人のオペレータが看視し、門230のパネル238に接続される監視/制御ステーション250を含む。ステーション250は処理サブシステム240を含む。サブシステム240を、サブシステム40と同様に、しかし門230の走査技術の差を考慮して、より詳しくは以下に記述するように構成することができる。ステーション250は、システム20に関連して記述したように、さらにサブシステム240に接続されている1または複数のオペレータ入力および出力デバイス(示さず)を含む。門230は、人222を支持するように配置された静止したプラットフォーム232を含む。プラットフォーム232を、一般に検査放射線に対して透明な材料で作成することができる。門230は、さらにアレイ236および各々のパネル238のためのモーター/駆動機構234を含む。アレイ236は、システム20に関連して述べたように、素子38の列で形成される。機構234およびアレイ236は機械的に互いに連結され、サブシステム240に操作可能に接続される。サブシステム240の制御の下に、モーター/駆動機構234は、アレイ236のそれぞれを、図12に最もよく例示される対応する走行経路P1またはP2に沿って制御可能に移動させるように構成される。特に、経路P1およびP2は軸Zの周りに回転する非直線の曲線型である。軸Zは図12に十字線で表され、図11中で最もよく図示されている垂直方向に対応する。対応して、各アレイ236は、それぞれの機構234によって駆動された時、プラットフォーム232および人222を含む検査領域239の周りに回転する経路を辿る。代わりにまたは追加して、経路P1およびP2のどちらかまたは両方を、曲線から成るか角度のある様式で少なくとも一つの他の経路部分に連結された少なくとも一つの直線状の経路部分で構成することができる。また別の配置では、経路P1およびP2の1または複数が斜めの角度で次々に連結された多数の直線状の経路区分で構成され、共同で検査領域の一部分の周りを回わる。この配置の一つの特定の形式では、経路区分を円弧または他の曲線から成る形に近似するように方向付ける。さらに、経路P1およびP2は一般に同じ長さで、また軸Zに関して対称であるが、他の実施態様では、経路P1およびP2は同じ長さでなく、および/または対称ではなくてもよい。一つのそれに代わる変更では、3枚以上のパネル、アレイ、および対応する経路を利用する。
【0076】
機構234は、それぞれのアレイ236用の運搬装置を駆動するために電動モーターまたは他の制御された原動機を含むことができる。そのような装置は、ベルト駆動、チェーン駆動、ローラー駆動または選択的にアレイ236を移動させるために当業者が考えつく他の機械化された連結を含むことができよう。他の実施態様では、単一の原動機を利用し、それに異なるパネル中の複数のアレイ236を機械的に連結させて、協調して移動させてもよい。さらなる実施態様では、所望の範囲の電磁エネルギーを送信および/または受信するために、別の走査編成を利用することができよう。
【0077】
システム220では、サブシステム240が、システム20におけるサブシステム40と同じに構成され、またプロシージャ120、ルーチン170a、ルーチン170bおよび/またはアレンジメント200に関連して記述した1または複数の操作を行なうように同様に編成され;そして、1または複数のトランシーバーおよび/または切替ツリーを適切に含むことができる。しかし、サブシステム240の操作は、人220の周面に関する検査を完全には提供しない。代わりに、検査が360°より少ない部分的な周面に対して行なわれる。行なわれる検査は、アレイ236が従う経路P1およびP2によって張られる角度A1およびA2に対応する。一つの好ましい実施態様では、角度A1およびA2は、少なくとも90°である。もっと好ましい実施態様では、角度A1およびA2はそれぞれ120°以下である。さらに好ましい実施態様では、角度A1およびA2は合わせて、領域239の回りに少なくとも240°の周面走査適用範囲を与える。システム220は、プラットフォーム232に対するアレイ236の位置を追跡するための、操作可能にシステム240に接続された1台または複数台のエンコーダ(示さず)および/または他のデバイス/技術を含むことができる。システム220は、さらにサブシステム60と同様の、サブシステム240と遠隔で通信するための通信サブシステム(示さず)を含むことができる。
【0078】
一つの特定の編成では、一つのアレイ236をそれぞれ収容するために、パネル238を形づくり構成する。アレイは各々が高さ約7フィートで、224個の素子38を含み、10〜20GHzの周波数範囲で作動する。より具体的には、アレイ236は各々、それぞれが112個の素子38からなる2つのサブアレイを含む。各アレイ236については、対応するサブアレイ対を背中合わせに配列する。この編成は2つの超広帯域のトランシーバー、および各アレイ236に対して1つずつの2つの対応する切替ツリーを利用し、選択的に一つの素子38で送信し別の素子38で所望の順序で受信する。サブシステム240内の高速コンピュータが、機構234、アレイ236、トランシーバーおよび切替ツリーを制御して、処理のための地形図的データを獲得する。パネル238は互いに向き合って、この配置に対して約240°の角度走査範囲を与える。このシステムを操作する一つの方式では、監視下の人222が「入口」という矢に沿ってパネル238間の領域239に入る。次に人222は、パネル238の一つの方へ向き、1〜2秒間対面し、その間にアレイ236が経路P1およびP2に沿って移動して走査を行なう。走査の後で、人222が回転し、「出口」という矢に沿って出る。この手順によって提供される240°の範囲をカバーすることが、セキュリティを脅かすほとんどの物体を検知するのに適切であることが明らかになった。パネル238をそれぞれ少なくとも部分的に透明に作成して、領域239に居る人222の検査の間に、オペレータがそれを通して見るのが容易になるようにする。
【0079】
図13を参照して、本発明に従って行なわれた研究室シミュレーション実験によって生成されたマネキン222aの断面の画像を示す。そのような断面画像は、プライバシー異議がなされる可能性がある画像を提供する可能性を低下させる一方、疑わしい物体の検知を容易にする。マネキン222aの種々の切断線255a、255bおよび255cについて得られた、列260、270および280の中の多くの図で、マネキン222aを画像化する。断面画像260a、270aおよび280aが、切断線255aに沿い、かつ軸Zに対して直角な断面に対応する。同様に、断面画像260b、270bおよび280bが、切断線255bに沿い、かつ軸Zに対して直角な断面に対応する。さらに、断面画像260cおよび280cが、切断線255cに沿い、かつ軸Zに対して直角な断面に対応する。列260に示される断面画像260a、260b、および260cが各々、軸Zに沿った、物体を携帯しておらず、また360°外周全体が画像化された断面図に対応する。列270の画像270aおよび270bもまた完全な360°外周断面図を提供し、またさらに、衣服によって隠された様々な脅威を描写する。具体的には、断面画像270aでは、小さな拳銃235および誘電体スラブ235aが検知されている。断面画像270bでは、手榴弾235bが検知されている。列280の画像280a、280bおよび280cは各々、240°の部分的な外周図を描写し、システム220の一つの配置に対応する。このシステムでは、不完全な適用範囲(部分的な外周)が、それにもかかわらず手榴弾235dを明らかにする。システム220の360°より少ない適用範囲の設定は、一定の使用で望まれるより速い走査および処理時間を提供することが発見された。
【0080】
システム220のこの特定の実験的設定については、パネル238をFM/CWモードで、20μsec未満で10〜20GHzを掃引するよう操作し、約1cmの画像解像度および約1.5cmの距離分解能を提供する。この方式の操作中、アレイ236を各々、2つの垂直方向に向けたサブアレイを背中合わせに配備した形で提供する。一つのサブアレイは送信、他方は受信専用とする。一つの形式では、各サブアレイを、スロットライン・アンテナ型の112個の素子で製作する。各サブアレイについて、素子を均一距離だけ互いに離して配置する。操作中に、走査デバイスが、一般に水平な走行経路P1またはP2の上を素早く移動する間に、各サブアレイは素子から素子へと電子的に走査される。アレイが移動する間、多くの走査を、一度にただ一つの送信する素子、およびその送信による反射電磁放射を受信するただ一つの素子で行なう。各送信素子および各受信素子を、走査中に所望の順序に従って作動させる。それにもかかわらず、さらに他の実施態様において、当業者が考えつくであろう直線状のアレイ配置の異なる数、サイズ、または型を利用することができる。さらに他の実施例で、種々の型の回転するおよび/または直線状の走査アレイを、別々にまたは組合せて利用することができる。さらに、断面画像の代わりにまたは追加として、他の型の画像および/またはプライバシー問題に対処するために図1〜10の実施態様に関連して記述したように、自動的隠蔽物体検知技術を利用することができる。
【0081】
図14および15が、本発明の別の実施態様のシステム320を図示する。これはプロシージャ120、ルーチン170a、ルーチン170b、および/または図10に関連して記述したアレンジメント200の1または複数の操作を行なうために用いることができる。システム320は、システム20に関連して記述した方式により人322を選択された電磁放射で照射する。システム320については、人322がファントム画法で示された物体325を隠蔽する衣料品を着用している。以前に記述した実施態様のように、システム320は無生物の検査にもまた用いることができる。システム320は、2重平面パネルの走査門330、および監視/制御ステーション350に含まれる処理サブシステム340を有する。門330を処理サブシステム340に接続し、より完全に以下に記載するような門330の走査技術の差を考慮して、サブシステム40と同様に構成することができる。ステーション350は、システム20について記述したような、サブシステム340に接続された1または複数のオペレータ入力および出力デバイスを含む。ステーション350を、門330に隣接して検問所オペレータインターフェースを提供するように編成することができる。
【0082】
門330は、人322および頭上のモーター/駆動サブシステム334を支持するために配置された静止プラットフォーム332を有する。サブシステム340の制御下で、サブシステム334を、2つのアレイ336それぞれを、対応するガイド棒337に沿って縦軸VAに対して上下方向に、制御しながら滑らせるように構成する。これに対応して、アレイ336はそれぞれ、人322を挟んで向かい側の一般に真直な直線状の経路を辿りまた各々向き合った対応するパネル338内に含まれている。図15は、パネル338のうちの1つを、部分的に切り開いた図面を利用してより詳細に示す。システム320において、サブシステム340は、以前に記述したものと大体は同じ操作を行なうためにシステム20のサブシステム40と同様に構成され、また適切にトランシーバーおよび/または切替ツリーを含むことができる。しかしながら、システム20とは対照的に、サブシステム340の操作は、システム20に関して記述した回転方式の代わりに、アレイ336の人322に対する直線状の並進運動から成る。システム320は、プラットフォーム332に対するアレイ336の位置を追跡するために、システム340に操作可能に接続された1台以上のエンコーダ(示さず)および/または他のデバイス/技術を含むことができる。システム320はさらに、遠隔でサブシステム340と通信するために、サブシステム60と同様の通信サブシステム(示さず)を含むことができる。
【0083】
一つの特定の配置では、パネル338を、約1.22m離して置き、またKu帯域中の約12.5〜18GHzの周波数掃引を行なって、約1cmの横方向分解能および約2.7cmの深度解像度を提供する。この配置に対しては、各アレイ336は、背中合わせに配置された、それぞれ約56個の素子の2つのサブアレイを含む。各アレイ336内の、一つのサブアレイを送信専用、別のサブアレイを受信専用とする。一つの形式では、各サブアレイを、約2cm互いに離れて置かれたスロットライン・アンテナで製作する。操作中には、走査器が人322の垂直方向の長さ全体を素早く移動する間、各サブアレイが電子的に素子から素子へと走査される。アレイが移動するとともに、多くの走査をアレイ336により行なう。各走査中、いかなる時にも、送信サブアレイの一つの素子のみが人を照射しており、また受信サブアレイの一つの素子のみが反射される電磁放射を集めている。従って、走査中には、所望の順序に従って各送信素子および各受信素子が作動される。この配備のFM/CWヘテロダイントランシーバー構成においては、5.5GHz周波数掃引を約12.75μsで行なう。一つの形式では、システム320は、操作162における地形図的表現および/またはフレームの生成は含まない、したがってルーチン170aおよび170bに関連して記述したフレームからフレームへの一貫性のチェックは行なわれない。さらに他の実施態様では、当業者が考えるであろう異なる数、サイズまたは型の直線状のアレイ配置を利用することができる。さらに他の実施例では、種々の型の回転するおよび/または直線状走査アレイを別々にまたは組合せて利用することができる。さらに、システム320を1または複数の人322の断面図を生成するために用いることができ、および/または、プライバシー問題に対処するために図1〜10の実施態様に関連して記述した1または複数の他の手法を利用することができる。
【0084】
図16は、本発明の別の実施態様の検査システム420を図示する。システム420は、システム20に関連して記述した方式で人422を選択された電磁放射により照射する。システム420では、人422が物体425を隠す衣料品424aおよび424bを着用している。以前に記述した実施態様のように、システム420は生物でない対照を検査するためにも用いることができる。
【0085】
システム420は、制御および処理サブシステム440に接続された走査ブース430を有する。走査ブース430は、人422を支持するように配備された静止プラットフォーム432およびアレイ436に連結されたモーター434を支持するためのフレーム433を含む。門30のプラットフォーム回転および門330に付随した並進運動とは対照的に、走査ブース430は検査中に回転軸Rおよびプラットフォーム432の周りにアレイ436を選択的に回転させる。この配置については、アレイ436は一般に円形の経路に従い、対応する想像上の円筒をプラットフォーム432の周りに提供する。立っている姿勢の人を走査するのに適した一つの形式では、この円筒の半径は約1mである。それ以外はアレイ36と同じにアレイ436を配置する。
【0086】
システム420では、サブシステム440をシステム20のサブシステム40と同様に構成し、またプロシージャ120、ルーチン170a、ルーチン170b、および/または、アレンジメント200の1または複数の操作を行なうために同様に編成して、セキュリティを脅かす可能性のある物体を検知する。しかし、サブシステム440の操作は、システム20でのアレイ36に対するプラットフォーム32の移動ではなく、プラットフォーム432に対するアレイ436の移動から成る。システム420は、サブシステム440に操作可能に接続された1台または複数台のエンコーダ(示さず)および/または他のデバイス/技術を、プラットフォーム432に対するアレイ436の位置を追跡するために含むことができる。システム420はさらに、遠隔でサブシステム440と通信するためにサブシステム60と同様な通信サブシステム(示さず)を含むことができる。システム420は、人422の1または複数の断面図を生成するために用いられることができ、および/またはプライバシー問題と取組むために図1〜10の実施態様に関連して記述した1または複数の他の手法を利用することができる。
【0087】
図17は、本発明のさらに別の実施態様の電磁放射検査システム520を図示する。システム520は、以前に記述した型の選択された電磁放射により人522を照射する。システム520については、人522が、物体525を隠蔽する符番524aおよび524bにより示された外被/衣服を着用している。以前に記述した実施態様のように、システム520を生きているまたは生きていない物体を検査するために用いることができる。
【0088】
システム520は、制御および処理サブシステム540に接続された走査ブース530を含む。走査ブース530は、人522を収容しかつアレイ536を支持するために設置されたフレーム533を有する。以前に記述したシステム20および420の、直線的に配向されたアレイ36、336、および436とは対照的に、アレイ536は、一般に中心線縦軸CVAを中心にしてリングまたは円輪として配置される。多数の電磁放射送信/受信素子を、一般に輪に沿った円形の経路に配置する。これらの素子は、ミリメートル波、マイクロ波、および/または隣接した波長帯中の1または複数の波長を含む電磁放射によって人522を検査するように作動する。アレイ536を、人522を走査するために、移動矢印Tによって表わされるように軸CVAに沿った並進運動をするように配置する。1または複数のモーターまたは他の原動機(示さず)を、軸CVAに沿って選択的にアレイ536を移動させるために利用する。
【0089】
図18の部分的な上面図をさらに参照して、アレイ536を開口537のサイズに合わせ、アレイ536が軸CVAに沿って上下に移動する際に、人522をそれを通って受け入れる。図18では、軸CVAは表示面に一般に垂直であり、十字線によって表わされている。アレイ536の上下運動により、想像上の円筒が人522の周りにアレイの円輪によって定まる円形経路に従って定義される;しかしながら、人522もアレイ536のどちらも相手に対して回転しない。代わりにアレイ536の並進運動が、人522を垂直に走査するために用いられる。
【0090】
サブシステム540は、サブシステム540の処理がアレイ436とその周辺のデバイスの垂直並進運動を担うように適応されていることを除けば、サブシステム40と同様に構成され、プロシージャ120、ルーチン170a、ルーチン170b、および/または1または複数の操作またはアレンジメント200を実行できる。システム520は、遠隔でサブシステム540と通信するためにさらにサブシステム60と同様な通信サブシステム(示さず)を含むことができる。以前に記述した実施態様と同様に、システム520は、プロシージャ120に関連して説明したように、隠蔽された物体を検知するために用いられる。
【0091】
アレイ36と比較して、アレイ536が以前に記述した実施態様と同等な解像度を有するためには、通常はより多くの送信/受信素子が必要である。一つの非限定の比較例において、選択された周波数帯に依存して、アレイ536のためには500〜2000送信/受信素子が、これに対して、アレイ36のためには200〜600が、同等な解像度に対して望ましいであろう。しかしながら、適切な条件下では、走査ブース530は、門30より実質的に速く走査を行なうことができる。一つの非限定の実施例において、門30の走査時間が約10〜20秒の範囲であるのに対して、走査ブース530では約2〜5秒である。システム520は、人522の1または複数の断面図を生成するために用いられ、および/またはプライバシー問題を取り扱うために図1〜10に関連して記述した1または複数の他の手法を利用することができる。
【0092】
本発明のさらなる実施態様では、検査が行われている身体およびアレイの両方が移動する。一つのそのような実施例において、アレイ要素は垂直に移動することができる円弧区分の中に配置され、一方身体は回転する。他の実施例では、アレイと身体の両方が回転および/または並進移動する。検査データの処理を、当業者に既知の技術を用いてこれらの種々の移動方式に対して調整することができる。
【0093】
システム220に関連して記述したように、検査および対応する画像情報は検査される身体の全周面に対応していなくてもよい。そのかわり、関心対象の区分は360°未満であり得る。そのような実施態様については、2以上の異なる視角に対応するデータを組み合わせることにより、画像情報を内挿することができる。代わりにまたは追加して、他の実施態様では、対象全体の高さ、幅、および/または長さより少なく走査してもよい。そのような選択枝に対しては、アレイのサイズおよび/または走査パターンを対応して調節することができる。
【0094】
本発明のさらに他の実施態様では、システム20,220、320、420、および/または520で集められた画像データは、地形図的表現を提供するために画像のいくつかまたはすべてを組み合わせなくても、多くの円筒状の画像に対応している。代わりに円筒状の画像を、組み合わせずにまたは単に部分的に組み合わせて用いる。さらに他の実施態様では、画像化は、地形図的表現を提供するためのある程度の組み合わせをしても、またはしなくても、元来完全にまたは部分的に非円筒状であってもよい。一つの特定のケースでは、システム320の平面状パネルが、円筒状の画像情報の代わりに、複数フレームのない平面状の画像情報を提供してもよい。
【0095】
一つのさらなる実施態様では、プロシージャ120、ルーチン170a、ルーチン170b、アレンジメント200、システム20、システム220、システム320、システム420、および/またはシステム520に従って獲得した画像情報を、さらに個人を識別するために利用する。この実施態様の一つの形式は、制限区域へのアクセスを制御するための:制限区域にアクセスすることを試みる個人を走査する工程;個人が任意の物体を隠蔽しているかどうかを、走査から判断する工程;個人の特徴に関する対応する画像情報の1または複数の様相を、制限区域へのアクセスを許可された者のために記憶されたデータと比較する工程;および、好ましい比較があり、疑わしい隠蔽された物体が示されない場合に、個人による制限区域へのアクセスを許可する工程、を含む技術を含む。適合したという決定を、ゲートまたは他のアクセス制御デバイスを作動させるために用いることができる。
【0096】
別の実施態様では、プロシージャ120、ルーチン170a、ルーチン170b、アレンジメント200、システム20、システム220、システム320、システム420および/またはシステム520に従って集められた画像情報を、追加してまたは代わりに、犯罪容疑者、公知のテロリスト等のアクセスを許可するべきでない個人を識別するために用いる。そのような実施態様のもう一つの変形では、個人の1または複数の他のバイオメトリックス(指紋、掌紋、網膜イメージ、音声パターン、その他)を、地形図的表現データに加えて、アクセスを許可するべきかどうかの決定の一部として比較する。識別に用いられる特徴を、アクセス制御手段を巧みに逃れる可能性を減少させるために、各アクセス毎に変更することができる。代わりにまたは追加して、本発明による物体検知法を、個人が許可されていない領域から物体を持ち出そうとしているかどうかを判断するために用いることができる。これらの実施態様のいずれも、方法、装置、システム、および/またはデバイスとして提供することができる。
【0097】
本明細書において引用されたすべての出版物および特許出願は、あたかも個々の出版物または特許出願がそれぞれ具体的に個々に参照によって組み入れられることが示されたかのように、参照によりすべて本明細書に組み入れられる。さらに、本明細書において述べた任意の理論、操作の機構、証明または発見は、さらに本発明についての理解を向上させることを目的とするものであり、そのような理論、操作の機構、証明または発見について本発明をどのように制限することも意図するものではない。本発明を図面および先の記述の中で詳細に図示し記述したが、それらは、例証であり性質上限定するものではないと考えるべきであり、選択した実施態様のみを示して記述したこと、および、本明細書においてまたは特許請求の範囲によって定義される本発明の精神に含まれる、すべての等価なもの、変更、および修正は保護されることが望まれることを理解するべきである。
【図面の簡単な説明】
【0098】
【図1】セキュリティ点検システムの部分的な線図である。
【図2】図1で示した視線2--2に沿った図1のシステムの部分的な上面図である。
【図3】図1のシステムを操作するための一つの手順を図示するフローチャートである。
【図4】図1のシステムを操作するための一つの手順を図示するフローチャートである。
【図5】多数の重複する円弧区分を図示するする図1のシステムの模式的な上面図である。
【図6】一つのタイプの物体検出ルーチンのフローチャートである。
【図7】別のタイプの物体検出ルーチンのフローチャートである。
【図8】図7のルーチンで使用するための、画像の重複した長方形の部分への区分化を図示するダイアグラムである。
【図9】図7のルーチンで使用するための3つの異なる型の特徴抽出器を比較する線図である。
【図10】図6および7の両方のルーチンにより図3および4のプロシージャを実行するために図1のシステムを利用する、隠された物体を検知するためのアレンジメントの概要のブロック・ダイアグラムである。
【図11】さらなるシステムの部分的な線側面図である。
【図12】図11に示した視線12---12に沿った図11のシステムの部分的な線上面図である。
【図13】本発明の様々な技術に従って生成された断面画像を図示する比較ダイアグラムである。
【図14】別のシステムの部分的な線図である。
【図15】図14に示した門の部分的な切り取り図である。
【図16】さらに別のシステムの部分的な線図である。
【図17】また別のシステムの部分的な線図である。
【図18】図17に示した視線18--18に沿った図17のシステムの部分的な線上面図である。
【特許請求の範囲】
【請求項1】
人に関連した隠蔽された表面から返された、約200MHz〜約1THzの範囲に1または複数の周波数を含む電磁放射を検知する工程;
返された電磁放射の、表面に沿った強度および表面に沿った深度に対応するデータを確立する工程;および
データを適応的に処理して、1または複数の密輸品または潜在的な安全上の脅威であると疑われる人工物体を人が携帯しているかどうかを、表面に沿った強度および表面に沿った深度の関数として決定する工程、
を含む方法。
【請求項2】
適応的に処理する工程が表面深度差分マップを処理して、人工物体を人が携帯しているかどうかを、表面に沿った深度の関数として決定する、請求項1記載の方法。
【請求項3】
メディアンフィルタおよび1または複数の形態フィルタを適用する工程を含む、請求項1記載の方法。
【請求項4】
第1の画像フレームデータセットを第2の画像フレームデータセットと比較する工程を含む、請求項1記載の方法。
【請求項5】
物体が少なくとも一つの武器である、請求項1記載の方法。
【請求項6】
トランスデューサアレイからの電磁放射出力によって人を照射する工程;および
人を表す画像上に人工物体の相対的位置を表示する工程;
を含む、請求項1記載の方法。
【請求項7】
適応的に処理する工程が、多数の画像部分のそれぞれに対して行われ、画像部分はそれぞれ一群の画像ピクセルに対応する、請求項1記載の方法。
【請求項8】
適応的に処理する工程がさらに:
ニューラルネットワークを利用して、画像部分のそれぞれを処理する工程;
ニューラルネットワークの入力の第1のセットのそれぞれについて、画像部分の各1つに対する一群の画像ピクセルに対応して画像ピクセル強度入力を受け取る工程;
ニューラルネットワークの入力の第2のセットのそれぞれについて、画像部分の1つに対して指定された群の画像ピクセルの各1つから深度差分入力を受け取る工程;および
ニューラルネットワークからの出力を閾値と比較して物体が疑わしいかどうかを決定する工程、
を含む、請求項7記載の方法。
【請求項9】
隠蔽された物体を携帯している人を含む検査領域を照射する工程;
該照射に応じて検査領域から返された約200MHz〜約1THzの範囲に1または複数の周波数を含む電磁放射を検知する工程;
検査領域に沿った、検査領域から返された電磁放射の強度マップおよび深度マップを表示するデータを確立する工程;ならびに
データをニューラルネットワークに入力して隠蔽された物体が少なくとも密輸品または武器の1つかどうかを、強度マップおよび深度マップに基づいて決定する工程、
を含む方法。
【請求項10】
ニューラルネットワークからの画像出力データに1または複数の形態フィルタを適用する工程;および
第1の画像フレームに対する第1のニューラルネットワーク画像出力を、第2の画像フレームに対する第2のニューラルネットワーク画像出力と比較する工程、
を含む、請求項9記載の方法。
【請求項11】
画像データ部分はそれぞれ画像ピクセルの異なる群に対応し、強度マップを表示するデータは画像ピクセル強度の二次元のマップに対応する、多くの異なる画像データ部分のそれぞれをニューラルネットワークにより評価して隠蔽された物体が存在するかどうかを決定する工程;
照射する工程および検知する工程に関連して決定された一時的な情報の関数としてピクセル範囲の二次元マップを計算する工程;および
ピクセル範囲の二次元マップに基づいて、深度差分に一致した深度マップを表現するデータを決定する工程、
を含む、請求項9記載の方法
【請求項12】
人を表す画像上に隠蔽された物体の相対的位置を表示する工程を含む、請求項9記載の方法。
【請求項13】
検査する工程が検問所の門の中の人を入射電磁放射により走査する工程を含み、かつ確立する工程が多数の円筒状の画像に対応する画像データを生成する工程を含む、請求項9記載の方法。
【請求項14】
確立する工程が人の1または複数の円筒状の画像に対応する情報を生成する工程を含む、請求項9記載の方法。
【請求項15】
約200MHz〜約1THzの範囲の1または複数の周波数の電磁放射により人を検査する操作可能なアレイ;および
処理サブシステムが入力の第1のセットおよび入力の第2のセットを含むニューラルネットワークを提供するように操作可能であり、入力の第1のセットが人の衣服の下の表面に沿った返された電磁放射強度のマップに対応するデータを受取るために配備されており、入力の第2のセットが表面に沿った深度マップに対応する他のデータを受取るために配備されており、ニューラルネットワークが強度マップおよび深度マップの関数として密輸品または潜在的な安全上の脅威の少なくとも1つであることが疑われる1または複数の物体を人が隠蔽しているかどうかを評価しかつ1または複数の対応する出力を提供するのに有効である、アレイに接続された処理サブシステム
を含むシステム。
【請求項16】
ニューラルネットワークが多層のパーセプトロン型である、請求項15記載のシステム。
【請求項17】
深度マップが深度差分を代表し、かつ処理サブシステムが範囲情報のマップから深度マップを決定するための手段を含む、請求項15記載のシステム。
【請求項18】
1または複数の物体の存在が示された場合に少なくとも一つの画像を提供する1または複数の出力に応答する表示デバイスをさらに含む、請求項15記載のシステム。
【請求項19】
処理サブシステムが画像情報をフィルタするための手段を含む、請求項15記載のシステム。
【請求項20】
検問所で人のセキュリティ走査を行なうために、人を支えるためのアレイに近接したプラットフォーム、ならびにアレイおよびプラットフォームの少なくとも1つを別のアレイおよびプラットフォームに対して移動させるためのモーターをさらに含む、請求項15記載のシステム。
【請求項21】
処理サブシステムがさらに人の多数の円筒状画像に対応する画像データを生成するように操作可能である、請求項15記載のシステム。
【請求項22】
1または複数のプロセッサにより約200MHz〜約1THzの範囲に1または複数の周波数を含む電磁放射から得られた人の画像に対応するデータを解析することができるロジックを所持するデバイスを含む装置であって、データが人に対して決定された電磁放射強度マップおよび深度マップを表しており、ロジックがさらにデータについて適応的な処理を実行して密輸品または潜在的な安全上の脅威の少なくとも1つである疑いのある1または複数の物体を人が隠蔽しているかどうかを電磁放射強度マップおよび深度マップの関数として評価することができ、かつもし適応的な処理によって示されれば、1または複数の物体の検知を表示する出力を提供するように操作可能である、装置。
【請求項23】
デバイスがプロセッサが読むことのできるメモリの形をしており、かつロジックがメモリに記憶された多数の命令の形をしている、請求項22記載の装置。
【請求項24】
デバイスがコンピュータネットワークの1または複数の部分を含んでおり、ロジックがコンピュータネットワーク上での送信のための1または複数の信号の中にコードされる、請求項22記載の装置。
【請求項25】
ロジックがさらに深度マップを深度差分マップとして決定するように操作可能である、請求項22記載の装置。
【請求項26】
ロジックが少なくとも一つのニューラルネットワークを定義する、請求項25記載の装置。
【請求項27】
ロジックが画像ピクセル情報をフィルタするための手段を定義する、請求項26記載の装置。
【請求項28】
互いに離れて置かれて検査領域をその間に定める2つ以上のアレイであって、それぞれ検査領域の周りに回転し、検査領域中の人を約200MHz〜約1THzの範囲の1または複数の周波数の電磁放射により検査して対応する検査信号を提供するように組立てられたアレイ;
検査信号から決定された地形図的画像に対応するデータを確立し、かつデータの関数として出力を生成するように操作可能な1または複数のプロセッサ;および
人がセキュリティを脅かす1または複数の隠蔽された物体を携帯している疑いがある場合に、オペレータに表示を供給する出力に反応するデバイス
を含むシステム。
【請求項29】
アレイにそれぞれ、パネルと、対応するアレイの1つを検査領域の周りの曲線状の経路に沿って移動させる機構とが備えられている、請求項28記載のシステム。
【請求項30】
曲線状の経路が円の弧に近い、請求項29記載のシステム。
【請求項31】
それぞれのアレイに対するパネルが、それを通したオペレータによる観察が容易になるように、少なくとも部分的に透明である、請求項29記載のシステム。
【請求項32】
デバイスがディスプレイを含み、1または複数のプロセッサが1または複数の人の断面図を表示する形式による出力を生成するための手段を含む、請求項28記載のシステム。
【請求項33】
アレイがそれぞれいくつかの異なる周波数で作動するように構成され、またそれぞれ検査領域の周りの少なくとも120度の角度を張る弧に対応する、請求項28記載のシステム。
【請求項34】
アレイ間に位置した人の周りを回転するようにそれぞれ形成された2つ以上のアレイを提供する工程;
アレイを操作して、約200MHz〜約1THzの範囲の1または複数の周波数の電磁放射により人の検査を行なう工程;および
検査から多数の円筒状の画像に対応する円筒状の画像データを生成して、人が物体を隠蔽しているかどうかを検知する工程
を含む方法。
【請求項35】
人の周りに設置された経路に沿ってアレイの各々を移動させる工程を含む、請求項34記載の方法。
【請求項36】
経路の少なくとも一部が曲線であり、経路が人に対して少なくとも120度の角度を張る、請求項35記載の方法。
【請求項37】
経路の少なくとも一部が直線である、請求項35記載の方法。
【請求項38】
地形図的画像データに基づく人の1または複数の断面図を表示する工程を含む、請求項34記載の方法。
【請求項39】
円筒状の画像データから地形図的画像データを生成する工程を含む、請求項34記載の方法。
【請求項40】
アレイが互いに向き合ってその間に検査領域を定め、また検問所を提供するよう配置される、請求項34記載の方法。
【請求項41】
2つ以上のアレイにより約200MHz〜約1THzの範囲の1または複数の周波数の電磁放射を生成し、2つ以上のアレイの間に位置した人の検査を行なう工程;
少なくとも一つのアレイを人の周りの非直線状の経路に沿って検査の間に移動させる工程;および
検査から地形図的画像データを生成して人が物体を隠蔽しているかどうかを検知する工程
を含む方法。
【請求項42】
経路が人に対して少なくとも90度の角度を張る、請求項41記載の方法。
【請求項43】
経路が人に対して少なくとも120度の角度を張る、請求項41記載の方法。
【請求項44】
アレイは2つであり、互いに向き合ってその間に検査領域を定め、検問所を提供するように配置され、経路の少なくとも一部分が曲線または直線である、請求項41記載の方法。
【請求項45】
地形図的画像データに基づいて人の1または複数の断面図を表示する工程を含む、請求項41記載の方法。
【請求項46】
多数の円筒状の画像データセットから地形図的画像データを生成する工程を含む、請求項41記載の方法。
【請求項47】
約200MHz〜約1THzの範囲に1または複数の周波数を含む電磁放射によって人の検査を実行する工程;
検査に基づいて人の1または複数の断面画像を生成する工程;および
1または複数の断面画像の少なくとも1つから、セキュリティを脅かす隠蔽された物体を人が携帯しているかどうかを決定する工程
を含む方法。
【請求項48】
生成する工程が人の異なる円筒状の画像にそれぞれ対応する多数のデータセットから1または複数の断面画像を形成する工程を含む、請求項47記載の方法。
【請求項49】
実行する工程が1対の向き合ったアレイを人の周りに非直線状の経路に沿って移動させる工程を含む、請求項47記載の方法。
【請求項50】
非直線状の経路が少なくとも90度の角度を張る、請求項49記載の方法。
【請求項51】
アレイがそれぞれ複数の異なる周波数の電磁放射を提供するように操作可能である、請求項49記載の方法。
【請求項52】
決定する工程が、1または複数の断面画像をオペレータへ表示する工程を含む、請求項47記載の方法。
【請求項1】
人に関連した隠蔽された表面から返された、約200MHz〜約1THzの範囲に1または複数の周波数を含む電磁放射を検知する工程;
返された電磁放射の、表面に沿った強度および表面に沿った深度に対応するデータを確立する工程;および
データを適応的に処理して、1または複数の密輸品または潜在的な安全上の脅威であると疑われる人工物体を人が携帯しているかどうかを、表面に沿った強度および表面に沿った深度の関数として決定する工程、
を含む方法。
【請求項2】
適応的に処理する工程が表面深度差分マップを処理して、人工物体を人が携帯しているかどうかを、表面に沿った深度の関数として決定する、請求項1記載の方法。
【請求項3】
メディアンフィルタおよび1または複数の形態フィルタを適用する工程を含む、請求項1記載の方法。
【請求項4】
第1の画像フレームデータセットを第2の画像フレームデータセットと比較する工程を含む、請求項1記載の方法。
【請求項5】
物体が少なくとも一つの武器である、請求項1記載の方法。
【請求項6】
トランスデューサアレイからの電磁放射出力によって人を照射する工程;および
人を表す画像上に人工物体の相対的位置を表示する工程;
を含む、請求項1記載の方法。
【請求項7】
適応的に処理する工程が、多数の画像部分のそれぞれに対して行われ、画像部分はそれぞれ一群の画像ピクセルに対応する、請求項1記載の方法。
【請求項8】
適応的に処理する工程がさらに:
ニューラルネットワークを利用して、画像部分のそれぞれを処理する工程;
ニューラルネットワークの入力の第1のセットのそれぞれについて、画像部分の各1つに対する一群の画像ピクセルに対応して画像ピクセル強度入力を受け取る工程;
ニューラルネットワークの入力の第2のセットのそれぞれについて、画像部分の1つに対して指定された群の画像ピクセルの各1つから深度差分入力を受け取る工程;および
ニューラルネットワークからの出力を閾値と比較して物体が疑わしいかどうかを決定する工程、
を含む、請求項7記載の方法。
【請求項9】
隠蔽された物体を携帯している人を含む検査領域を照射する工程;
該照射に応じて検査領域から返された約200MHz〜約1THzの範囲に1または複数の周波数を含む電磁放射を検知する工程;
検査領域に沿った、検査領域から返された電磁放射の強度マップおよび深度マップを表示するデータを確立する工程;ならびに
データをニューラルネットワークに入力して隠蔽された物体が少なくとも密輸品または武器の1つかどうかを、強度マップおよび深度マップに基づいて決定する工程、
を含む方法。
【請求項10】
ニューラルネットワークからの画像出力データに1または複数の形態フィルタを適用する工程;および
第1の画像フレームに対する第1のニューラルネットワーク画像出力を、第2の画像フレームに対する第2のニューラルネットワーク画像出力と比較する工程、
を含む、請求項9記載の方法。
【請求項11】
画像データ部分はそれぞれ画像ピクセルの異なる群に対応し、強度マップを表示するデータは画像ピクセル強度の二次元のマップに対応する、多くの異なる画像データ部分のそれぞれをニューラルネットワークにより評価して隠蔽された物体が存在するかどうかを決定する工程;
照射する工程および検知する工程に関連して決定された一時的な情報の関数としてピクセル範囲の二次元マップを計算する工程;および
ピクセル範囲の二次元マップに基づいて、深度差分に一致した深度マップを表現するデータを決定する工程、
を含む、請求項9記載の方法
【請求項12】
人を表す画像上に隠蔽された物体の相対的位置を表示する工程を含む、請求項9記載の方法。
【請求項13】
検査する工程が検問所の門の中の人を入射電磁放射により走査する工程を含み、かつ確立する工程が多数の円筒状の画像に対応する画像データを生成する工程を含む、請求項9記載の方法。
【請求項14】
確立する工程が人の1または複数の円筒状の画像に対応する情報を生成する工程を含む、請求項9記載の方法。
【請求項15】
約200MHz〜約1THzの範囲の1または複数の周波数の電磁放射により人を検査する操作可能なアレイ;および
処理サブシステムが入力の第1のセットおよび入力の第2のセットを含むニューラルネットワークを提供するように操作可能であり、入力の第1のセットが人の衣服の下の表面に沿った返された電磁放射強度のマップに対応するデータを受取るために配備されており、入力の第2のセットが表面に沿った深度マップに対応する他のデータを受取るために配備されており、ニューラルネットワークが強度マップおよび深度マップの関数として密輸品または潜在的な安全上の脅威の少なくとも1つであることが疑われる1または複数の物体を人が隠蔽しているかどうかを評価しかつ1または複数の対応する出力を提供するのに有効である、アレイに接続された処理サブシステム
を含むシステム。
【請求項16】
ニューラルネットワークが多層のパーセプトロン型である、請求項15記載のシステム。
【請求項17】
深度マップが深度差分を代表し、かつ処理サブシステムが範囲情報のマップから深度マップを決定するための手段を含む、請求項15記載のシステム。
【請求項18】
1または複数の物体の存在が示された場合に少なくとも一つの画像を提供する1または複数の出力に応答する表示デバイスをさらに含む、請求項15記載のシステム。
【請求項19】
処理サブシステムが画像情報をフィルタするための手段を含む、請求項15記載のシステム。
【請求項20】
検問所で人のセキュリティ走査を行なうために、人を支えるためのアレイに近接したプラットフォーム、ならびにアレイおよびプラットフォームの少なくとも1つを別のアレイおよびプラットフォームに対して移動させるためのモーターをさらに含む、請求項15記載のシステム。
【請求項21】
処理サブシステムがさらに人の多数の円筒状画像に対応する画像データを生成するように操作可能である、請求項15記載のシステム。
【請求項22】
1または複数のプロセッサにより約200MHz〜約1THzの範囲に1または複数の周波数を含む電磁放射から得られた人の画像に対応するデータを解析することができるロジックを所持するデバイスを含む装置であって、データが人に対して決定された電磁放射強度マップおよび深度マップを表しており、ロジックがさらにデータについて適応的な処理を実行して密輸品または潜在的な安全上の脅威の少なくとも1つである疑いのある1または複数の物体を人が隠蔽しているかどうかを電磁放射強度マップおよび深度マップの関数として評価することができ、かつもし適応的な処理によって示されれば、1または複数の物体の検知を表示する出力を提供するように操作可能である、装置。
【請求項23】
デバイスがプロセッサが読むことのできるメモリの形をしており、かつロジックがメモリに記憶された多数の命令の形をしている、請求項22記載の装置。
【請求項24】
デバイスがコンピュータネットワークの1または複数の部分を含んでおり、ロジックがコンピュータネットワーク上での送信のための1または複数の信号の中にコードされる、請求項22記載の装置。
【請求項25】
ロジックがさらに深度マップを深度差分マップとして決定するように操作可能である、請求項22記載の装置。
【請求項26】
ロジックが少なくとも一つのニューラルネットワークを定義する、請求項25記載の装置。
【請求項27】
ロジックが画像ピクセル情報をフィルタするための手段を定義する、請求項26記載の装置。
【請求項28】
互いに離れて置かれて検査領域をその間に定める2つ以上のアレイであって、それぞれ検査領域の周りに回転し、検査領域中の人を約200MHz〜約1THzの範囲の1または複数の周波数の電磁放射により検査して対応する検査信号を提供するように組立てられたアレイ;
検査信号から決定された地形図的画像に対応するデータを確立し、かつデータの関数として出力を生成するように操作可能な1または複数のプロセッサ;および
人がセキュリティを脅かす1または複数の隠蔽された物体を携帯している疑いがある場合に、オペレータに表示を供給する出力に反応するデバイス
を含むシステム。
【請求項29】
アレイにそれぞれ、パネルと、対応するアレイの1つを検査領域の周りの曲線状の経路に沿って移動させる機構とが備えられている、請求項28記載のシステム。
【請求項30】
曲線状の経路が円の弧に近い、請求項29記載のシステム。
【請求項31】
それぞれのアレイに対するパネルが、それを通したオペレータによる観察が容易になるように、少なくとも部分的に透明である、請求項29記載のシステム。
【請求項32】
デバイスがディスプレイを含み、1または複数のプロセッサが1または複数の人の断面図を表示する形式による出力を生成するための手段を含む、請求項28記載のシステム。
【請求項33】
アレイがそれぞれいくつかの異なる周波数で作動するように構成され、またそれぞれ検査領域の周りの少なくとも120度の角度を張る弧に対応する、請求項28記載のシステム。
【請求項34】
アレイ間に位置した人の周りを回転するようにそれぞれ形成された2つ以上のアレイを提供する工程;
アレイを操作して、約200MHz〜約1THzの範囲の1または複数の周波数の電磁放射により人の検査を行なう工程;および
検査から多数の円筒状の画像に対応する円筒状の画像データを生成して、人が物体を隠蔽しているかどうかを検知する工程
を含む方法。
【請求項35】
人の周りに設置された経路に沿ってアレイの各々を移動させる工程を含む、請求項34記載の方法。
【請求項36】
経路の少なくとも一部が曲線であり、経路が人に対して少なくとも120度の角度を張る、請求項35記載の方法。
【請求項37】
経路の少なくとも一部が直線である、請求項35記載の方法。
【請求項38】
地形図的画像データに基づく人の1または複数の断面図を表示する工程を含む、請求項34記載の方法。
【請求項39】
円筒状の画像データから地形図的画像データを生成する工程を含む、請求項34記載の方法。
【請求項40】
アレイが互いに向き合ってその間に検査領域を定め、また検問所を提供するよう配置される、請求項34記載の方法。
【請求項41】
2つ以上のアレイにより約200MHz〜約1THzの範囲の1または複数の周波数の電磁放射を生成し、2つ以上のアレイの間に位置した人の検査を行なう工程;
少なくとも一つのアレイを人の周りの非直線状の経路に沿って検査の間に移動させる工程;および
検査から地形図的画像データを生成して人が物体を隠蔽しているかどうかを検知する工程
を含む方法。
【請求項42】
経路が人に対して少なくとも90度の角度を張る、請求項41記載の方法。
【請求項43】
経路が人に対して少なくとも120度の角度を張る、請求項41記載の方法。
【請求項44】
アレイは2つであり、互いに向き合ってその間に検査領域を定め、検問所を提供するように配置され、経路の少なくとも一部分が曲線または直線である、請求項41記載の方法。
【請求項45】
地形図的画像データに基づいて人の1または複数の断面図を表示する工程を含む、請求項41記載の方法。
【請求項46】
多数の円筒状の画像データセットから地形図的画像データを生成する工程を含む、請求項41記載の方法。
【請求項47】
約200MHz〜約1THzの範囲に1または複数の周波数を含む電磁放射によって人の検査を実行する工程;
検査に基づいて人の1または複数の断面画像を生成する工程;および
1または複数の断面画像の少なくとも1つから、セキュリティを脅かす隠蔽された物体を人が携帯しているかどうかを決定する工程
を含む方法。
【請求項48】
生成する工程が人の異なる円筒状の画像にそれぞれ対応する多数のデータセットから1または複数の断面画像を形成する工程を含む、請求項47記載の方法。
【請求項49】
実行する工程が1対の向き合ったアレイを人の周りに非直線状の経路に沿って移動させる工程を含む、請求項47記載の方法。
【請求項50】
非直線状の経路が少なくとも90度の角度を張る、請求項49記載の方法。
【請求項51】
アレイがそれぞれ複数の異なる周波数の電磁放射を提供するように操作可能である、請求項49記載の方法。
【請求項52】
決定する工程が、1または複数の断面画像をオペレータへ表示する工程を含む、請求項47記載の方法。
【図1】

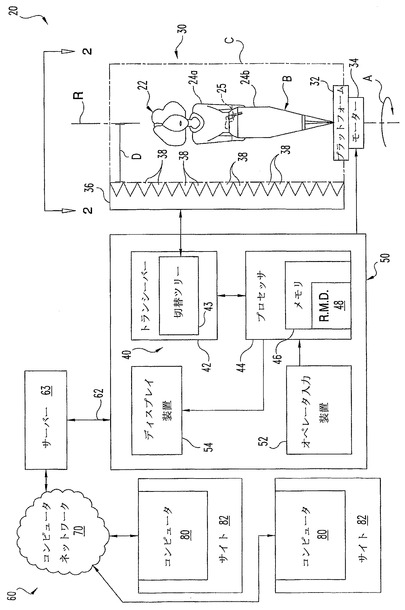
【図2】
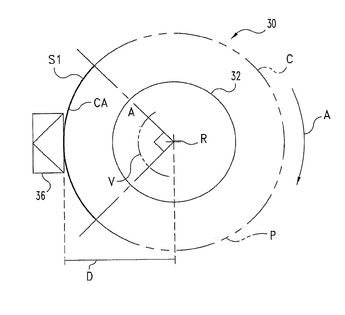
【図3】
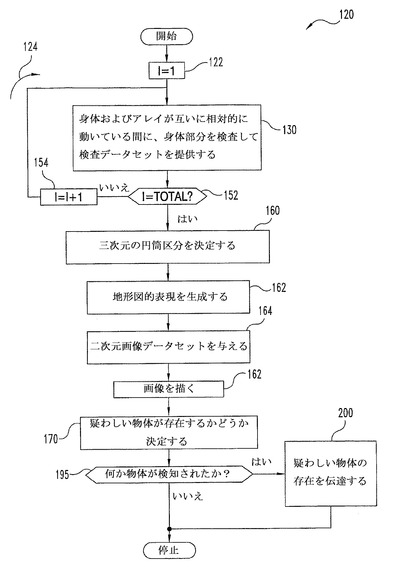
【図4】
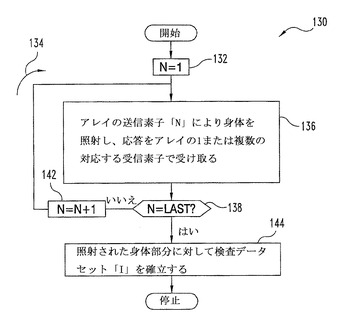
【図5】
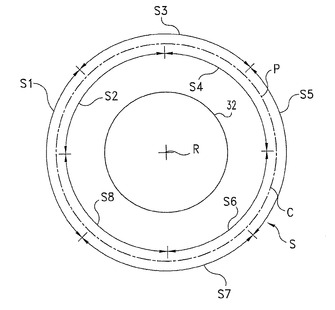
【図6】
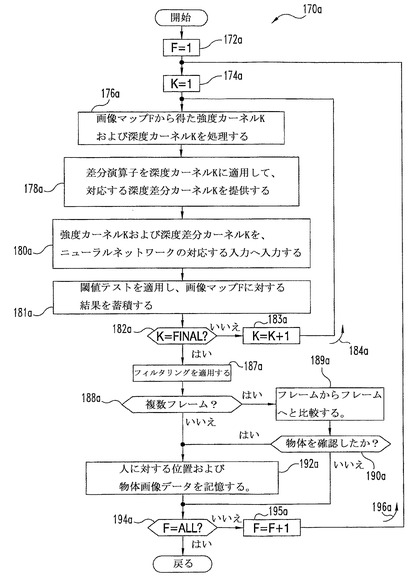
【図7】
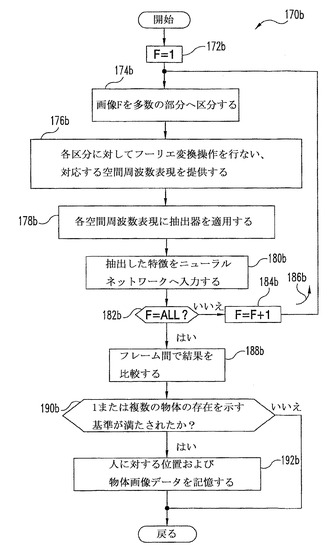
【図8】
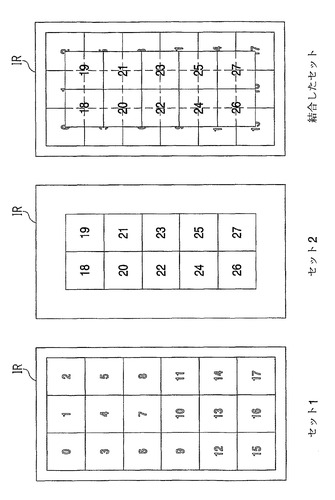
【図9】
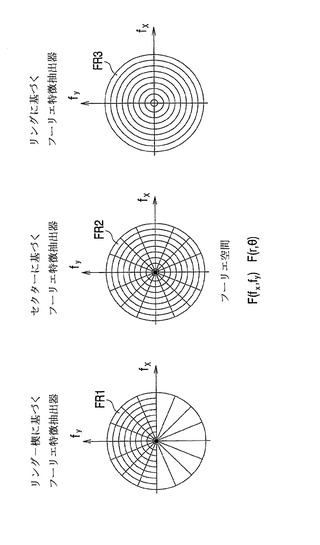
【図10】
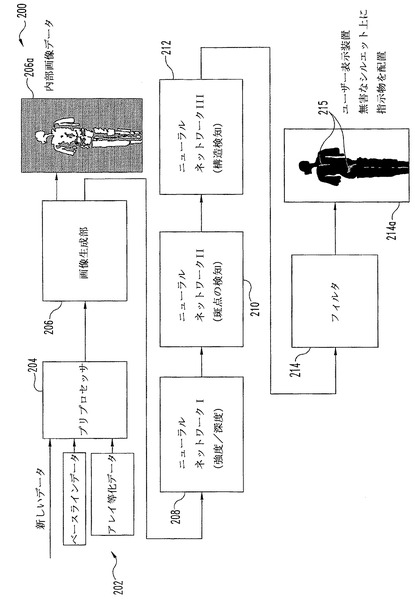
【図11】
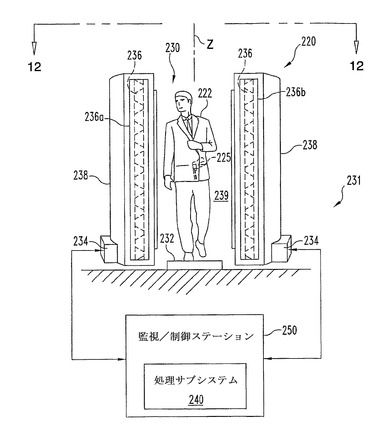
【図12】
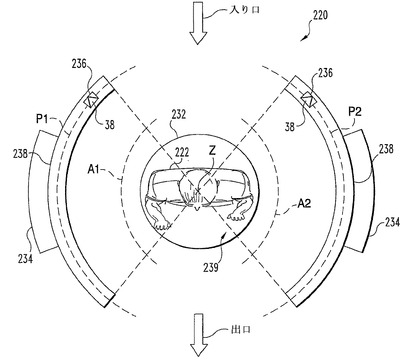
【図13】
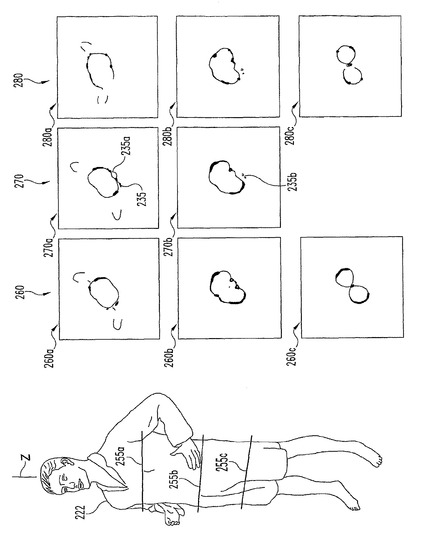
【図14】
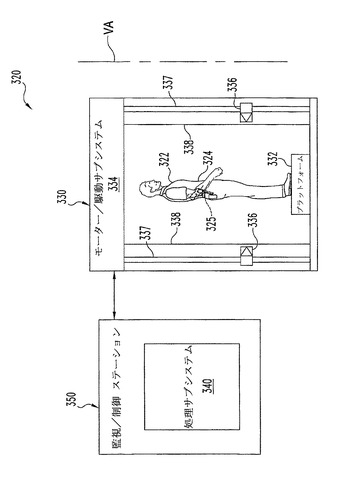
【図15】
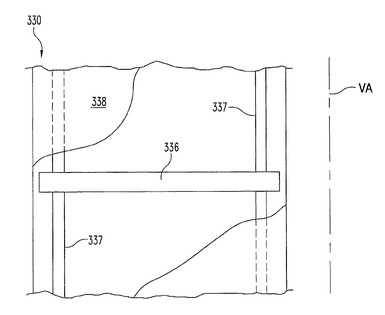
【図16】
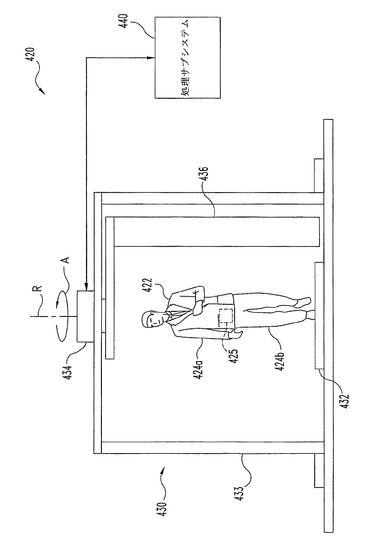
【図17】
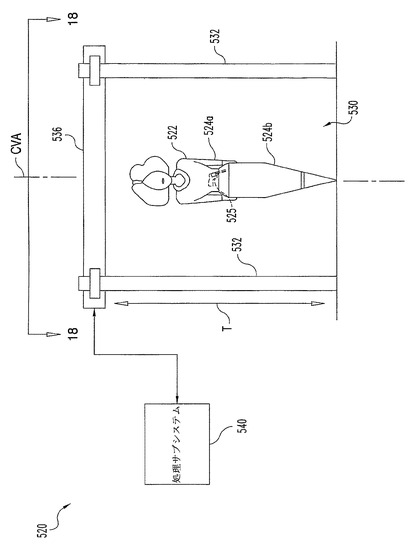
【図18】
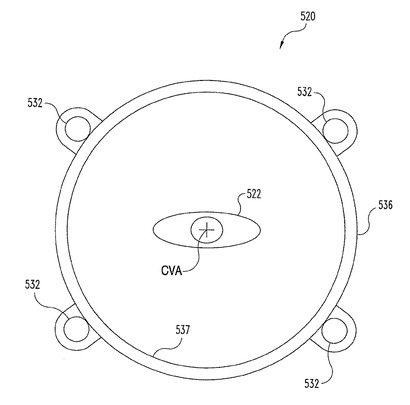
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公表番号】特表2007−517275(P2007−517275A)
【公表日】平成19年6月28日(2007.6.28)
【国際特許分類】
【出願番号】特願2006−538110(P2006−538110)
【出願日】平成16年10月22日(2004.10.22)
【国際出願番号】PCT/US2004/034889
【国際公開番号】WO2005/050160
【国際公開日】平成17年6月2日(2005.6.2)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.フロッピー
【出願人】(506150227)バッテル メモリアル インスティチュート (2)
【Fターム(参考)】
【公表日】平成19年6月28日(2007.6.28)
【国際特許分類】
【出願日】平成16年10月22日(2004.10.22)
【国際出願番号】PCT/US2004/034889
【国際公開番号】WO2005/050160
【国際公開日】平成17年6月2日(2005.6.2)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.フロッピー
【出願人】(506150227)バッテル メモリアル インスティチュート (2)
【Fターム(参考)】
[ Back to top ]