
隣接基地局決定方法及び管理装置
【課題】
自動で隣接基地局を決定し、その情報を基地局に記憶させる方法であって、基地局設置時に即座に隣接基地局情報が設定され、無線リソースも消費しない、新たな方法を提案する。
【解決手段】
隣接基地局を自動で決定するための決定論理として、2つの基地局間の距離がそれぞれの基地局の通信可能半径の和よりも小さい場合にその2つの基地局をお互いに隣接基地局とする、という決定論理を導入する。
上記決定論理を実行して隣接基地局を自動で決定する管理装置を導入する。
自動で隣接基地局を決定し、その情報を基地局に記憶させる方法であって、基地局設置時に即座に隣接基地局情報が設定され、無線リソースも消費しない、新たな方法を提案する。
【解決手段】
隣接基地局を自動で決定するための決定論理として、2つの基地局間の距離がそれぞれの基地局の通信可能半径の和よりも小さい場合にその2つの基地局をお互いに隣接基地局とする、という決定論理を導入する。
上記決定論理を実行して隣接基地局を自動で決定する管理装置を導入する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、無線通信システムにおいて自動で隣接基地局を決定する技術に関する。
【背景技術】
【0002】
近年の無線通信システムはセルラ方式が広く普及している。セルラ方式では、1つの基地局が移動局に対し電波を送受信できるエリアをセルと呼び、基地局を複数配置してセルをつなぎ合わせることにより、システム全体のサービスエリアを構成する。移動局はその移動局が位置するセルの基地局を介して通信を行う。隣接するセルの端と端が重なるように基地局を配置し、移動局がセル間を移動する際に移動局と通信する基地局を移動元セルの基地局から移動先セルの基地局へと素早く切り替えることにより、移動局が通信を継続したままセル間を移動できるソフトハンドオーバーという技術が広く用いられている。基地局は通常、ソフトハンドオーバーを速やかに実施するために、連携する隣接基地局の識別子やIPアドレスなどの情報をあらかじめ記憶している必要がある。
【0003】
通信事業者は、新たに基地局を設置する場合、セル設計用コンピュータシミュレーションを行ったり実際に現地で周辺基地局から到来する電波の強度測定を行ったりすることによって隣接基地局を決定し、基地局に設定している。近年、この通信事業者が行っている隣接基地局の決定・設定作業を軽減するために、これらの作業を自動化する方法が求められている。
【0004】
また、近く導入が予定されているフェムトセル基地局のようにユーザにより設置される基地局に対してはそもそも通信事業者が隣接基地局の設定をすることができないため、そのような基地局の導入においてユーザに煩雑な設定作業を課さないためという観点においても、基地局が自動で隣接基地局を決定し設定する機能の必要性が見込まれる。
【0005】
これまで、自動で隣接基地局を設定する方法として下記の特許文献に示すような技術が考案されている。
特許文献1では、基地局は移動局と通信した際に当該移動局の識別子と基地局自身の識別子を基地局制御部に通知する。基地局制御部は一定時間内に同一移動局と一定回数以上通信した複数の基地局を互いに隣接基地局として決定し、各基地局に通知する。
特許文献2では、基地局または移動局が下り電波の電界強度を測定し、電波が存在する場合それが共通の移動通信システムに使用されているものであるかを解析し、共通の移動通信システムに使用されているものである場合、その電波を送信している基地局を隣接基地局に含める。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2006−217051号公報
【特許文献2】特開平8−237728号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明は、自動で隣接基地局を決定し、基地局に設定する方法を確立することを目的とする。
【0008】
上記の特許文献の方法は、それぞれ次のような問題点がある。
特許文献1では、同一の移動局が一定時間内にある基地局と他の基地局それぞれに対し一定回数以上通信するという条件が満たされるまでは両基地局は互いを隣接基地局として記憶しないため、条件が満たされない間は、それらの基地局間を移動する移動局はソフトハンドオーバーすることができない。
特許文献2では、基地局が他の基地局の下り電波を測定し解析する場合、本来移動局が持つ機能である下り電波の復調機能を基地局に実装しなければならず、また、実装したとしても、他の基地局の電波はセルの境界では検出可能でも基地局の位置まで離れると減衰して検出できない可能性がある。また、移動局が下り電波を測定し解析する場合、移動局が新たな下り電波を受信するたびに、または周期的に、移動局から基地局へ報告を行う必要があるため、無線リソースを消費する。
【0009】
そこで、本発明では、自動で隣接基地局を決定し、その情報を基地局に記憶させる方法であって、基地局設置時に即座に隣接基地局情報が設定され、無線リソースも消費しない、新たな方法を提案する。
【課題を解決するための手段】
【0010】
隣接基地局を自動で決定するための決定論理として、2つの基地局間の距離がそれぞれの基地局の通信可能半径の和よりも小さい場合にその2つの基地局をお互いに隣接基地局とする、という決定論理を導入する。
【0011】
上記決定論理を実行して隣接基地局を自動で決定する管理装置を導入する。
【0012】
上記管理装置は、各基地局から識別子、位置情報、電波の送信電力値およびその他の情報を収集し、電波の送信電力値から通信可能半径を算出し、位置情報から基地局間の距離を算出し、上記決定論理に照らして隣接基地局を自動で決定する。更に、決定した隣接基地局のIPアドレスなどの情報を基地局に送信することで隣接基地局情報の設定を自動化する。
【発明の効果】
【0013】
本発明によれば、基地局を設置する際に、その基地局に対する隣接基地局の決定および隣接基地局情報の設定が自動で実行されるため、通信事業者やユーザが基地局を設置する際の作業が軽減される。
【0014】
また、本発明によれば、新たな基地局が設置された際に、その基地局の隣接基地局として決定された周辺の基地局の隣接基地局情報に当該新たな基地局の情報が自動で追加されるため、通信事業者またはユーザが新規基地局設置に対応して既設基地局の隣接基地局情報を更新する必要がなくなる。
【0015】
また、本発明によれば、基地局を設置した際に、設置した基地局に対する隣接基地局情報の作成、および設置した基地局の隣接基地局として決定された周辺基地局に対する隣接基地局情報の更新が即座に行われるため、設置した基地局のサービス開始直後から、当該設置した基地局から隣接基地局へのソフトハンドオーバー、および隣接基地局から当該設置した基地局へのソフトハンドオーバーが可能となる。
【0016】
また、本発明によれば、本発明の実施のために無線リソースを消費することがない。
【図面の簡単な説明】
【0017】
【図1】本発明を適用する無線通信システムの構成を示す図である。
【図2】管理装置102の構成を示す図である。
【図3】基地局情報テーブル301の内容の変化を示す図である。
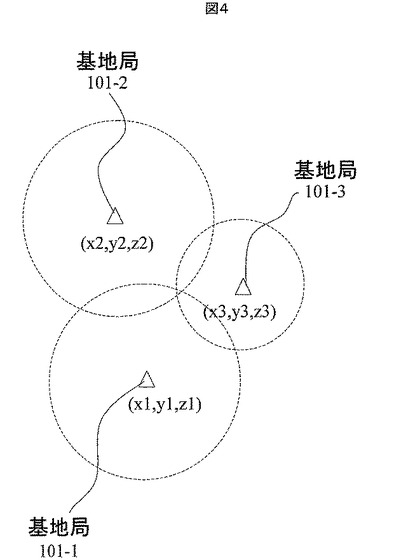
【図4】地図上の基地局101−i(i=1〜3)の位置と通信可能半径の関係を示す図である。
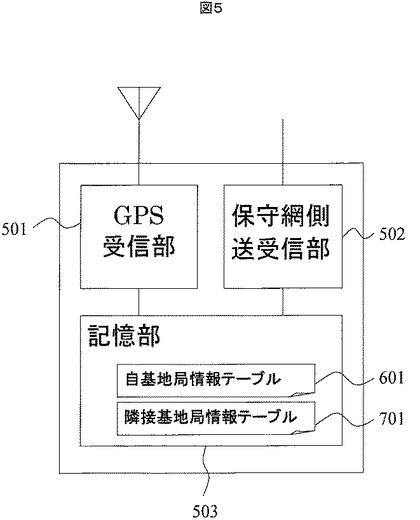
【図5】実施例1における、基地局101の構成を示す図である。
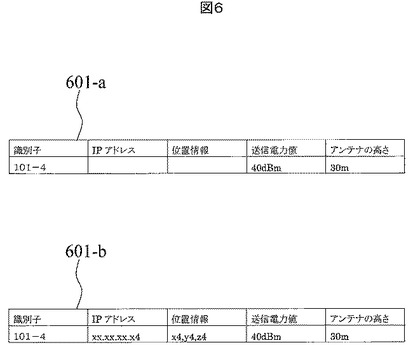
【図6】実施例1における、基地局101−4の自基地局情報テーブルの内容の変化を示す図である。
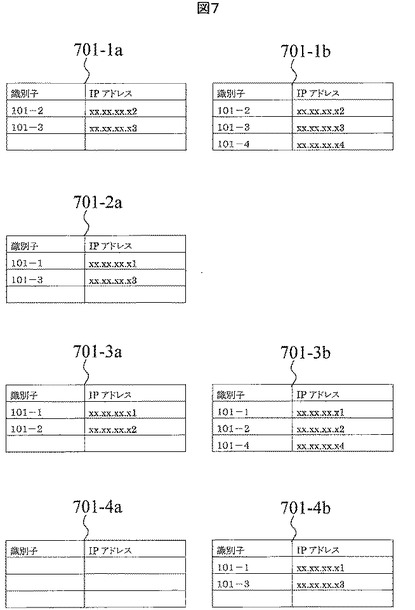
【図7】基地局101−i(i=1〜4)の自基地局情報テーブル701の内容の変化を示す図である。
【図8】実施例1、2、3における、隣接基地局の自動決定および隣接基地局情報の自動設定を実現するためのシーケンス図である。
【図9】地図上の基地局101−i(i=1〜4)の位置と通信可能半径の関係を示す図である。
【図10】実施例2、3における、基地局101がユーザインタフェースとユーザインタフェース制御部1001を搭載した場合の構成を示す図である。
【図11】実施例2、3における、基地局101−4の自基地局情報テーブルの内容の変化を示す図である。
【図12】実施例4における、基地局101が処理部1201を搭載した場合の構成を示す図である。
【図13】実施例4における、基地局101−4の自基地局情報テーブルの内容の変化を示す図である。
【図14】実施例4における、隣接基地局の自動決定および隣接基地局情報の自動設定を実現するためのシーケンス図である。
【発明を実施するための形態】
【0018】
以下、本発明の実施の形態について、図面を参照して詳細に説明する。
【実施例1】
【0019】
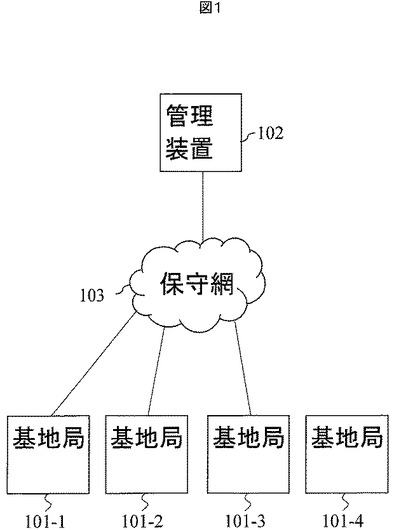
図1に、本発明を適用する無線通信システムの構成を示す。無線通信システムは、既設の基地局101−1、101−2、101−3と、管理装置102を備える。基地局101−1、101−2、101−3と管理装置102は保守網103に接続されている。ここで、新たに基地局101−4を設置する場合を考え、その際に本発明の方法がどのように適用されるかを以降に説明する。
【0020】
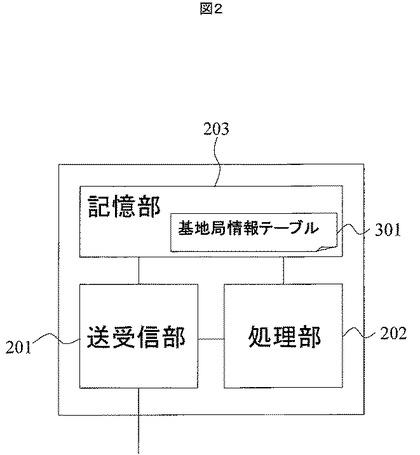
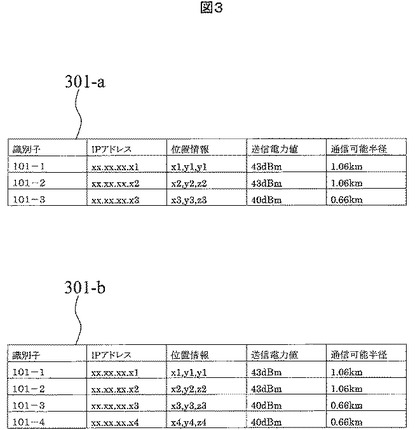
まず、管理装置102の構成を図2に示す。管理装置102は、保守網103と接続される送受信部201と、処理部202と、記憶部203を備えている。記憶部203には基地局情報テーブル301が記憶される。基地局101−4を設置する前の基地局情報テーブル301は図3の301−aのようになっている。すなわち、既設の基地局101−1、101−2、101−3それぞれについて、識別子、IPアドレス、位置情報、送信電力値、通信可能半径が記憶されている。これらの情報は、基地局101−1、101−2、101−3それぞれが設置された際に、以降に説明する本発明の方法が実行されたことにより記憶されたものである。
【0021】
なお、処理部202について、各基地局101(基地局101−1、101−2、101−3、101−4)の通信可能半径の算出を実行する部分を通信半径算出部と呼び、各基地局101の隣接基地局の決定を実行する部分を隣接基地局決定部と呼んでも良い。
【0022】
なお、実際の地図上での基地局101−1、101−2、101−3の位置と通信可能半径は図4のとおりであるものとする。三角印は各基地局の位置を、点線円はその円の中心の三角印が示す基地局の通信可能半径を示す。
【0023】
図5は、基地局101(基地局101−1、101−2、101−3、101−4共通)の構成を示す図である。基地局101は、GPS受信部501と、保守網103と接続される保守網側送受信部502と、記憶部503を備えている。記憶部503には自基地局情報テーブル601と隣接基地局情報テーブル701が記憶される。
【0024】
基地局101−4が設置される前の基地局101−1の隣接基地局情報テーブルは図7の701−1aのようになっている。すなわち、隣接基地局として基地局101−2と基地局101−3が記憶されている。
【0025】
また、基地局101−4が設置される前の基地局101−2の隣接基地局情報テーブルは図7の701−2aのようになっている。すなわち、隣接基地局として基地局101−1と基地局101−3が記憶されている。
【0026】
また、基地局101−4が設置される前の基地局101−3の隣接基地局情報テーブルは図7の701−3aのようになっている。すなわち、隣接基地局として基地局101−1と基地局101−2が記憶されている。
【0027】
基地局101−4の起動前の自基地局情報テーブルは図6の601−aのようになっている。すなわち、自基地局の識別子、送信電力値、アンテナの高さはあらかじめ設定され記憶されている。また、基地局101−4の起動前の隣接基地局情報テーブルは図7の701−4aのようにまだ何も記憶されていない状態になっている。
【0028】
基地局101−4は、起動されると、GPS受信部501により自動的に位置情報を取得し、自基地局情報テーブルに記憶する。基地局101−4はまた、保守網103に接続されると、自動的に管理装置から自基地局のIPアドレスを取得し、自基地局情報テーブルに記憶する。この、IPアドレスを自動で取得する方法は、一般に広く用いられているDHCPを利用することにより可能であるため、ここでは詳細は記載しない。この時点で、基地局101−4の自基地局情報テーブルは図6の601−bのようになる。
【0029】
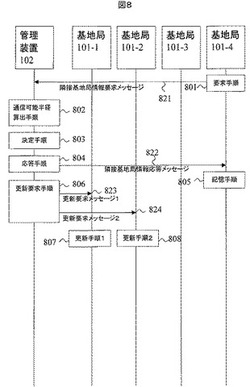
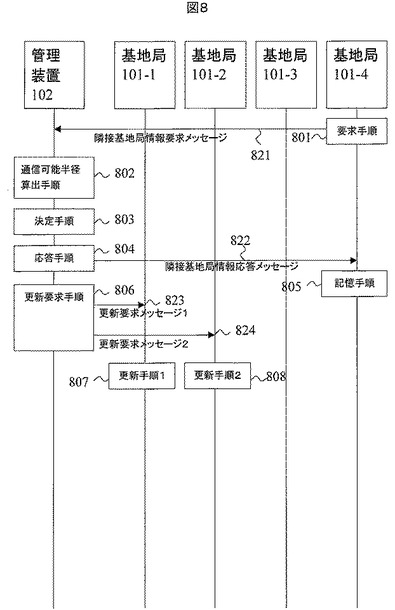
基地局101−4は、位置情報と自基地局のIPアドレスを取得すると、図8に示す、隣接基地局の自動決定および隣接基地局情報の自動設定をするためのシーケンスを開始する。以降、このシーケンスについて説明する。
【0030】
(要求手順801)
まず、基地局101−4は、自基地局情報テーブルに記憶されている自基地局の識別子とIPアドレスと位置情報と送信電力値とアンテナの高さを含めた隣接基地局情報要求メッセージ(821)を、保守網側送受信部502から管理装置102に送信する。
【0031】
(通信可能半径算出手順802)
管理装置102は隣接基地局情報要求メッセージ(821)を送受信部201で受信すると、処理部202において基地局101−4の送信電力値をもとに基地局101−4の通信可能半径を算出する。通信可能半径の算出は、一般に知られている電波の伝搬損失の式を用いて行う。例えば奥村−秦モデルを用いて次のように算出する。
【0032】
ここで、基地局101−4は市街地に新設されたものとする。奥村−秦モデルでは、市街地をモデルとした基準特性の近似式は式1であり、
(式1)
Lb=69.55+26.16×log(f)−13.82×log(h1)−{(1.1×log(f)−0.7)×h2−(1.56×log(f)−0.8)}+(44.9−6.55×log(h1))×log(R)
ここで、
Lb:伝搬損失(dB)
f:周波数(MHz)
h1:基地局アンテナ高(m)
h2:移動局アンテナ高(m)
R:伝搬距離(km)
である。
【0033】
式1のLb、f、h1、h2に値を与え、Rについて解くと、それが通信可能半径となる。基地局101−4の送信電力値を40dBm、基地局アンテナゲインを10dBi、移動局アンテナゲインを0dBi、ゲイン補正値を0dBm、移動局の許容受信感度を−70dBmとした場合、許容伝搬損失=送信電力値+基地局アンテナゲイン+移動局アンテナゲイン+ゲイン補正値−移動局の許容受信感度=40+10+0+0−(−70)=120dBであるのでLb=120(dB)となる。この際、送信電力値は隣接基地局情報要求メッセージ(821)に含まれていた値を用いる。また、基地局アンテナゲイン、移動局アンテナゲイン、ゲイン補正値、移動局の許容受信感度は固定値として管理装置102に記憶されているものとする。ゲイン補正値は、受信技術としてレイク合成のようにゲインを得られる技術を用いたときにそのゲインを加味するため等の目的で用いる。f=800(MHz)とする。これはシステムが使用する電波の周波数であり、固定値として管理装置102に記憶されているものとする。h1=30(m)とする。これは隣接基地局情報要求メッセージ(821)に含まれていた値を用いる。h2=1(m)とする。これは固定値として管理装置102に記憶されているものとする。これらを式1に代入すると、R≒0.66kmとなる。すなわち、基地局101−4の通信可能半径は0.66kmとなる。
【0034】
なお、奥村−秦モデルでは、市街地モデルの式以外にも開放地、郊外、大都市などのモデルの式も用意されているため、あらかじめ自基地局の立地環境がどのモデルに合致するかを示すモデル情報を自基地局情報テーブルに記憶させておき、要求手順801において隣接基地局情報要求メッセージ(821)の中にそのモデル情報を含め、通信可能半径算出手順802においてそのモデル情報が示すモデルの式を用いて算出することにより、市街地以外の場合についても通信可能半径を算出することができる。
【0035】
管理装置102は、通信可能半径算出後、基地局101−4の識別子、IPアドレス、位置情報、送信電力値、通信可能半径を基地局情報テーブル301に記憶する。以上が通信可能半径算出手順(802)である。
【0036】
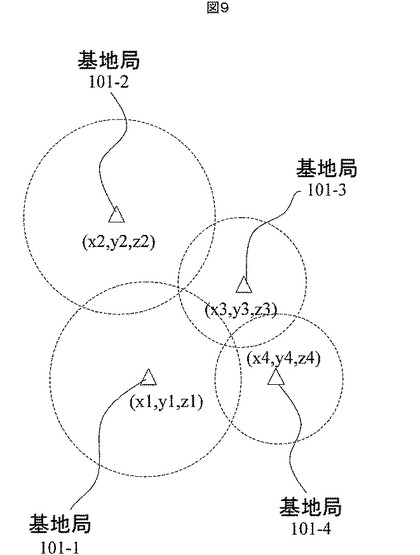
この段階で、管理装置102の基地局情報テーブル301は図3の301−bのようになる。また、実際の地図上での基地局101−1、101−2、101−3、101−4の位置と通信可能半径の関係は図9のようになったものとする。
【0037】
(決定手順803)
管理装置102は処理部202において、基地局情報テーブル301に記憶されている基地局101−4の位置情報と基地局101−1の位置情報をもとに基地局101−4と基地局101−1との距離を算出し、更に基地局情報テーブル301に記憶されている基地局101−4の通信可能半径と基地局101−1の通信可能半径の和を算出し、両算出結果を比較する。その結果は図9に示すように距離が通信可能半径の和より小さいため、基地局101−1と基地局101−4を互いに隣接基地局であると決定する。また、同様に基地局101−4と基地局101−2について両者の距離と両者の通信可能半径の和を比較する。その結果は図9に示すように、距離が通信可能半径の和より大きいため、基地局101−2と基地局101−4は互いに隣接基地局としない。また、同様に基地局101−4と基地局101−3について両者の距離と両者の通信可能半径の和を比較する。その結果は図9に示すように、距離が通信可能半径の和より小さいため、基地局101−3と基地局101−4を互いに隣接基地局であると決定する。
【0038】
(応答手順804)
管理装置102は送受信部201から基地局101−4へ、基地局101−1と基地局101−3それぞれの識別子とIPアドレスを含めた隣接基地局情報応答メッセージ(822)を返信する。
【0039】
(記憶手順 805)
基地局101−4は保守網側送受信部502で隣接基地局情報応答メッセージ(822)を受信すると、基地局101−1と基地局101−3それぞれの識別子とIPアドレスを隣接基地局情報テーブルに記憶する。
この段階で、基地局101−4の隣接基地局情報テーブルは図7の701−4bのようになる。
【0040】
(更新要求手順806)
管理装置102は送受信部201から基地局101−1へ、基地局101−4の識別子とIPアドレスを含めた更新要求メッセージ1(823)を送信する。また、基地局101−3へ、基地局101−4の識別子とIPアドレスを含めた更新要求メッセージ2(824)を送信する。
【0041】
(更新手順1 807)
基地局101−1は更新要求メッセージ1(823)を受信すると、基地局101−4の識別子とIPアドレスを隣接基地局情報テーブルに記憶する。
この段階で、基地局101−1の隣接基地局情報テーブルは図7の701−1bのようになる。
【0042】
(更新手順2 808)
基地局101−3は更新要求メッセージ2(824)を受信すると、基地局101−4の識別子とIPアドレスを隣接基地局情報テーブルに記憶する。この段階で、基地局101−3の隣接基地局情報テーブルは図7の701−3bのようになる。
【0043】
以上において、基地局101−4の設置時に、基地局101−4の隣接基地局の決定とそれら隣接基地局の情報の設定が自動で行われること、および、基地局101−4の隣接基地局となった基地局101−1の隣接基地局情報の更新と、同様に基地局101−4の隣接基地局となった基地局101−3の隣接基地局情報の更新が自動で行われることを例示した。
【実施例2】
【0044】
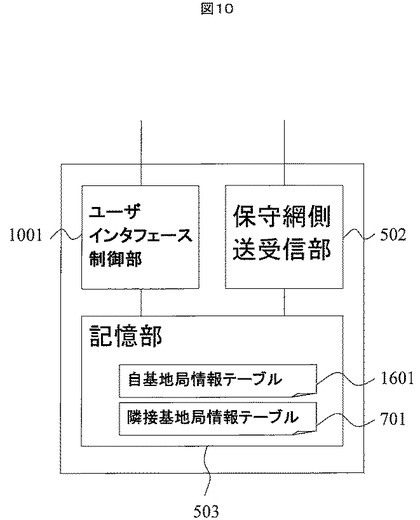
実施例2は、実施例1において基地局101−4の構成が図10のようにGPS受信機を搭載しておらず、代わりにユーザインタフェースとユーザインタフェース制御部1001を搭載した構成であった場合について、ユーザインタフェースから入力された情報をもとに位置情報を取得し、自動で隣接基地局の情報を設定する実施例である。
【0045】
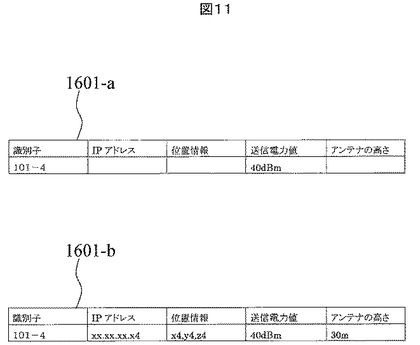
基地局101−4の起動前の自基地局情報テーブル1601は図11の1601−aのようになっている。すなわち、識別子、送信電力値があらかじめ記憶されている。
【0046】
基地局101−4は、起動後、ユーザインタフェース制御部によりユーザインタフェースを通してユーザに対し、基地局のアンテナの高さの入力を求め、更に、基地局の位置情報または基地局が設置された住所のいずれかの入力を求める。
ユーザは、基地局のアンテナの高さを入力し、また、位置情報が分かる場合は位置情報を入力し、分からない場合は住所を入力する。以降、位置情報を入力された場合、住所を入力された場合それぞれについて説明する。
【0047】
(位置情報を入力された場合)
基地局101−4は、入力されたアンテナの高さと位置情報を自基地局情報テーブル1601に記憶する。そして、保守網103に接続された際に、自動的に管理装置から自基地局のIPアドレスを取得し、自基地局情報テーブル1601に記憶する。この時点で、自基地局情報テーブル1601は図11の1601−bのようになる。以降は、実施例1の要求手順(801)以降の手順を同様に実施することにより、自動で隣接基地局情報の設定が行われ、実施例1と同じ結果が得られる。
【0048】
(住所を入力された場合)
住所を入力された場合、基地局101−4は、まず、入力されたアンテナの高さを自基地局情報テーブル1601に記憶する。それから、住所をもとに位置情報を特定するアプリケーションを実行することにより、入力された住所に対応する位置情報を特定し、自基地局情報テーブル1601に記憶する。そして、保守網103に接続された際に、自動的に管理装置102から自基地局のIPアドレスを取得し、自基地局情報テーブル1601に記憶する。この時点で、自基地局情報テーブル1601は図11の1601−bのようになる。以降は、実施例1の要求手順(801)以降の手順を同様に実施することにより、自動で隣接基地局情報の設定が行われ、実施例1と同じ結果が得られる。
【実施例3】
【0049】
実施例3は、実施例2で住所を入力された場合の別の例であり、住所をもとに位置情報を特定するアプリケーションが基地局101ではなく管理装置102に搭載されている場合の例である。
【0050】
基地局101−4は、保守網103に接続された際に、自動的に管理装置102から自基地局のIPアドレスを取得し、自基地局情報テーブル1601に記憶した後、入力された住所を含めた位置情報要求メッセージを管理装置102に送信する。管理装置102は送受信部201で位置情報要求メッセージを受信すると、住所をもとに位置情報を特定するアプリケーションを実行することにより、位置情報要求メッセージに含まれている住所に対応する位置情報を特定し、その位置情報を含めた位置情報応答メッセージを基地局101−4に返信する。基地局101−4は保守網側送受信部502で位置情報応答メッセージを受信すると、その位置情報応答メッセージに含まれている位置情報を自基地局情報テーブル1601に記憶する。この時点で、自基地局情報テーブル1601は図11の1601−bのようになる。以降は、実施例1の要求手順(801)以降の手順を同様に実施することにより、自動で隣接基地局情報の設定が行われ、実施例1と同じ結果が得られる。
【実施例4】
【0051】
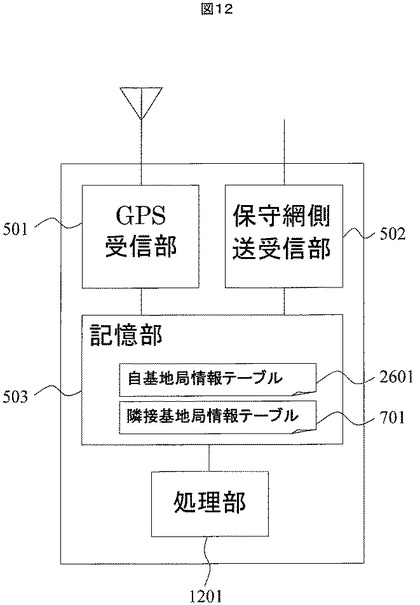
実施例1では、電波の送信電力をもとに通信可能半径を算出する機能が管理装置102の処理部202に搭載されていた。それに対し、実施例4は、電波の送信電力をもとに通信可能半径を算出する機能が管理装置102の処理部202に搭載されておらず、代わりに基地局101が図12のように処理部1201を含む構成の基地局であり、当該処理部1201に電波の送信電力をもとに通信可能半径を算出する機能が搭載されている場合の例である。
【0052】
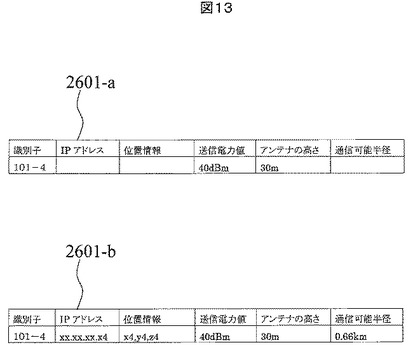
基地局101−4の起動前の自基地局情報テーブル2601は図13の2601−aのようになっている。すなわち、識別子、送信電力値、アンテナの高さがあらかじめ記憶されている。
【0053】
基地局101−4は、起動されると、GPS受信部501により自動的に位置情報を取得し、自基地局情報テーブル2601に記憶する。基地局101−4はまた、保守網103に接続されると、自動的に管理装置102から自基地局のIPアドレスを取得し、自基地局情報テーブル2601に記憶する。このIPアドレスを自動で取得する方法は、一般に広く用いられているDHCPを利用することにより可能であるため、ここでは詳細は記載しない。更に、基地局101−4は処理部1201において、自基地局情報テーブル2601に記憶されている送信電力値をもとに通信可能半径を算出し、自基地局情報テーブル2601に記憶する。通信可能半径の算出は、実施例1の通信可能半径算出手順802と同様に、例えば奥村−秦モデルを用いて行う。この時点で、基地局101−4の自基地局情報テーブルは図13の2601−bのようになる。
【0054】
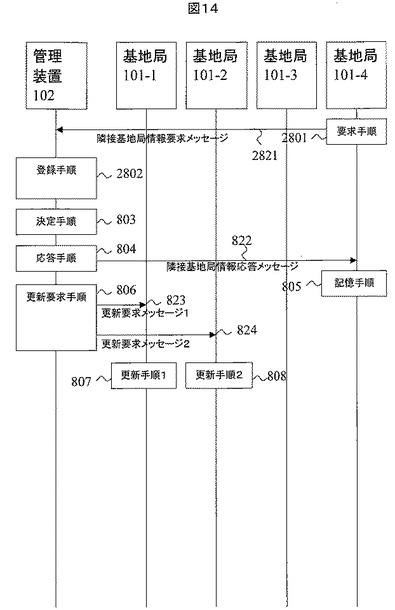
基地局101−4は、位置情報と自基地局のIPアドレスを取得し、通信可能半径を算出すると、図14に示す、隣接基地局の自動決定および隣接基地局情報の自動設定をするためのシーケンスを開始する。以降、このシーケンスについて、実施例1の図8のシーケンスとの差分を説明する。
【0055】
(要求手順2801)
基地局101−4は、自基地局情報テーブル2601に記憶されている自基地局の識別子とIPアドレスと位置情報と送信電力値とアンテナの高さと通信可能半径を含めた隣接基地局情報要求メッセージ(2821)を、保守網側送受信部502から管理装置102に送信する。
【0056】
(登録手順2802)
管理装置102は、送受信部201で隣接基地局情報要求メッセージ(2821)を受信すると、基地局101−4の識別子、IPアドレス、位置情報、送信電力値、通信可能半径を基地局情報テーブル301に記憶する。
【0057】
この段階で、管理装置102の基地局情報テーブル301は図3の301−bのようになる。また、実際の地図上での基地局101−1、101−2、101−3、101−4の位置と通信可能半径の関係は図9のようになったものとする。以降は、実施例1の要求手順(803)以降の手順を同様に実施することにより、自動で隣接基地局情報の設定が行われ、実施例1と同じ結果が得られる。
【符号の説明】
【0058】
101…基地局、102…管理装置、103…保守網、201…送受信部、202…処理部、203…記憶部、301…基地局情報テーブル、501…GPS受信部、502…保守網側送受信部、503…記憶部、601…自基地局情報テーブル、701…隣接基地局情報テーブル、1001…ユーザインタフェース制御部、1201…処理部、1601…自基地局情報テーブル、2601…自基地局情報テーブル
【技術分野】
【0001】
本発明は、無線通信システムにおいて自動で隣接基地局を決定する技術に関する。
【背景技術】
【0002】
近年の無線通信システムはセルラ方式が広く普及している。セルラ方式では、1つの基地局が移動局に対し電波を送受信できるエリアをセルと呼び、基地局を複数配置してセルをつなぎ合わせることにより、システム全体のサービスエリアを構成する。移動局はその移動局が位置するセルの基地局を介して通信を行う。隣接するセルの端と端が重なるように基地局を配置し、移動局がセル間を移動する際に移動局と通信する基地局を移動元セルの基地局から移動先セルの基地局へと素早く切り替えることにより、移動局が通信を継続したままセル間を移動できるソフトハンドオーバーという技術が広く用いられている。基地局は通常、ソフトハンドオーバーを速やかに実施するために、連携する隣接基地局の識別子やIPアドレスなどの情報をあらかじめ記憶している必要がある。
【0003】
通信事業者は、新たに基地局を設置する場合、セル設計用コンピュータシミュレーションを行ったり実際に現地で周辺基地局から到来する電波の強度測定を行ったりすることによって隣接基地局を決定し、基地局に設定している。近年、この通信事業者が行っている隣接基地局の決定・設定作業を軽減するために、これらの作業を自動化する方法が求められている。
【0004】
また、近く導入が予定されているフェムトセル基地局のようにユーザにより設置される基地局に対してはそもそも通信事業者が隣接基地局の設定をすることができないため、そのような基地局の導入においてユーザに煩雑な設定作業を課さないためという観点においても、基地局が自動で隣接基地局を決定し設定する機能の必要性が見込まれる。
【0005】
これまで、自動で隣接基地局を設定する方法として下記の特許文献に示すような技術が考案されている。
特許文献1では、基地局は移動局と通信した際に当該移動局の識別子と基地局自身の識別子を基地局制御部に通知する。基地局制御部は一定時間内に同一移動局と一定回数以上通信した複数の基地局を互いに隣接基地局として決定し、各基地局に通知する。
特許文献2では、基地局または移動局が下り電波の電界強度を測定し、電波が存在する場合それが共通の移動通信システムに使用されているものであるかを解析し、共通の移動通信システムに使用されているものである場合、その電波を送信している基地局を隣接基地局に含める。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2006−217051号公報
【特許文献2】特開平8−237728号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明は、自動で隣接基地局を決定し、基地局に設定する方法を確立することを目的とする。
【0008】
上記の特許文献の方法は、それぞれ次のような問題点がある。
特許文献1では、同一の移動局が一定時間内にある基地局と他の基地局それぞれに対し一定回数以上通信するという条件が満たされるまでは両基地局は互いを隣接基地局として記憶しないため、条件が満たされない間は、それらの基地局間を移動する移動局はソフトハンドオーバーすることができない。
特許文献2では、基地局が他の基地局の下り電波を測定し解析する場合、本来移動局が持つ機能である下り電波の復調機能を基地局に実装しなければならず、また、実装したとしても、他の基地局の電波はセルの境界では検出可能でも基地局の位置まで離れると減衰して検出できない可能性がある。また、移動局が下り電波を測定し解析する場合、移動局が新たな下り電波を受信するたびに、または周期的に、移動局から基地局へ報告を行う必要があるため、無線リソースを消費する。
【0009】
そこで、本発明では、自動で隣接基地局を決定し、その情報を基地局に記憶させる方法であって、基地局設置時に即座に隣接基地局情報が設定され、無線リソースも消費しない、新たな方法を提案する。
【課題を解決するための手段】
【0010】
隣接基地局を自動で決定するための決定論理として、2つの基地局間の距離がそれぞれの基地局の通信可能半径の和よりも小さい場合にその2つの基地局をお互いに隣接基地局とする、という決定論理を導入する。
【0011】
上記決定論理を実行して隣接基地局を自動で決定する管理装置を導入する。
【0012】
上記管理装置は、各基地局から識別子、位置情報、電波の送信電力値およびその他の情報を収集し、電波の送信電力値から通信可能半径を算出し、位置情報から基地局間の距離を算出し、上記決定論理に照らして隣接基地局を自動で決定する。更に、決定した隣接基地局のIPアドレスなどの情報を基地局に送信することで隣接基地局情報の設定を自動化する。
【発明の効果】
【0013】
本発明によれば、基地局を設置する際に、その基地局に対する隣接基地局の決定および隣接基地局情報の設定が自動で実行されるため、通信事業者やユーザが基地局を設置する際の作業が軽減される。
【0014】
また、本発明によれば、新たな基地局が設置された際に、その基地局の隣接基地局として決定された周辺の基地局の隣接基地局情報に当該新たな基地局の情報が自動で追加されるため、通信事業者またはユーザが新規基地局設置に対応して既設基地局の隣接基地局情報を更新する必要がなくなる。
【0015】
また、本発明によれば、基地局を設置した際に、設置した基地局に対する隣接基地局情報の作成、および設置した基地局の隣接基地局として決定された周辺基地局に対する隣接基地局情報の更新が即座に行われるため、設置した基地局のサービス開始直後から、当該設置した基地局から隣接基地局へのソフトハンドオーバー、および隣接基地局から当該設置した基地局へのソフトハンドオーバーが可能となる。
【0016】
また、本発明によれば、本発明の実施のために無線リソースを消費することがない。
【図面の簡単な説明】
【0017】
【図1】本発明を適用する無線通信システムの構成を示す図である。
【図2】管理装置102の構成を示す図である。
【図3】基地局情報テーブル301の内容の変化を示す図である。
【図4】地図上の基地局101−i(i=1〜3)の位置と通信可能半径の関係を示す図である。
【図5】実施例1における、基地局101の構成を示す図である。
【図6】実施例1における、基地局101−4の自基地局情報テーブルの内容の変化を示す図である。
【図7】基地局101−i(i=1〜4)の自基地局情報テーブル701の内容の変化を示す図である。
【図8】実施例1、2、3における、隣接基地局の自動決定および隣接基地局情報の自動設定を実現するためのシーケンス図である。
【図9】地図上の基地局101−i(i=1〜4)の位置と通信可能半径の関係を示す図である。
【図10】実施例2、3における、基地局101がユーザインタフェースとユーザインタフェース制御部1001を搭載した場合の構成を示す図である。
【図11】実施例2、3における、基地局101−4の自基地局情報テーブルの内容の変化を示す図である。
【図12】実施例4における、基地局101が処理部1201を搭載した場合の構成を示す図である。
【図13】実施例4における、基地局101−4の自基地局情報テーブルの内容の変化を示す図である。
【図14】実施例4における、隣接基地局の自動決定および隣接基地局情報の自動設定を実現するためのシーケンス図である。
【発明を実施するための形態】
【0018】
以下、本発明の実施の形態について、図面を参照して詳細に説明する。
【実施例1】
【0019】
図1に、本発明を適用する無線通信システムの構成を示す。無線通信システムは、既設の基地局101−1、101−2、101−3と、管理装置102を備える。基地局101−1、101−2、101−3と管理装置102は保守網103に接続されている。ここで、新たに基地局101−4を設置する場合を考え、その際に本発明の方法がどのように適用されるかを以降に説明する。
【0020】
まず、管理装置102の構成を図2に示す。管理装置102は、保守網103と接続される送受信部201と、処理部202と、記憶部203を備えている。記憶部203には基地局情報テーブル301が記憶される。基地局101−4を設置する前の基地局情報テーブル301は図3の301−aのようになっている。すなわち、既設の基地局101−1、101−2、101−3それぞれについて、識別子、IPアドレス、位置情報、送信電力値、通信可能半径が記憶されている。これらの情報は、基地局101−1、101−2、101−3それぞれが設置された際に、以降に説明する本発明の方法が実行されたことにより記憶されたものである。
【0021】
なお、処理部202について、各基地局101(基地局101−1、101−2、101−3、101−4)の通信可能半径の算出を実行する部分を通信半径算出部と呼び、各基地局101の隣接基地局の決定を実行する部分を隣接基地局決定部と呼んでも良い。
【0022】
なお、実際の地図上での基地局101−1、101−2、101−3の位置と通信可能半径は図4のとおりであるものとする。三角印は各基地局の位置を、点線円はその円の中心の三角印が示す基地局の通信可能半径を示す。
【0023】
図5は、基地局101(基地局101−1、101−2、101−3、101−4共通)の構成を示す図である。基地局101は、GPS受信部501と、保守網103と接続される保守網側送受信部502と、記憶部503を備えている。記憶部503には自基地局情報テーブル601と隣接基地局情報テーブル701が記憶される。
【0024】
基地局101−4が設置される前の基地局101−1の隣接基地局情報テーブルは図7の701−1aのようになっている。すなわち、隣接基地局として基地局101−2と基地局101−3が記憶されている。
【0025】
また、基地局101−4が設置される前の基地局101−2の隣接基地局情報テーブルは図7の701−2aのようになっている。すなわち、隣接基地局として基地局101−1と基地局101−3が記憶されている。
【0026】
また、基地局101−4が設置される前の基地局101−3の隣接基地局情報テーブルは図7の701−3aのようになっている。すなわち、隣接基地局として基地局101−1と基地局101−2が記憶されている。
【0027】
基地局101−4の起動前の自基地局情報テーブルは図6の601−aのようになっている。すなわち、自基地局の識別子、送信電力値、アンテナの高さはあらかじめ設定され記憶されている。また、基地局101−4の起動前の隣接基地局情報テーブルは図7の701−4aのようにまだ何も記憶されていない状態になっている。
【0028】
基地局101−4は、起動されると、GPS受信部501により自動的に位置情報を取得し、自基地局情報テーブルに記憶する。基地局101−4はまた、保守網103に接続されると、自動的に管理装置から自基地局のIPアドレスを取得し、自基地局情報テーブルに記憶する。この、IPアドレスを自動で取得する方法は、一般に広く用いられているDHCPを利用することにより可能であるため、ここでは詳細は記載しない。この時点で、基地局101−4の自基地局情報テーブルは図6の601−bのようになる。
【0029】
基地局101−4は、位置情報と自基地局のIPアドレスを取得すると、図8に示す、隣接基地局の自動決定および隣接基地局情報の自動設定をするためのシーケンスを開始する。以降、このシーケンスについて説明する。
【0030】
(要求手順801)
まず、基地局101−4は、自基地局情報テーブルに記憶されている自基地局の識別子とIPアドレスと位置情報と送信電力値とアンテナの高さを含めた隣接基地局情報要求メッセージ(821)を、保守網側送受信部502から管理装置102に送信する。
【0031】
(通信可能半径算出手順802)
管理装置102は隣接基地局情報要求メッセージ(821)を送受信部201で受信すると、処理部202において基地局101−4の送信電力値をもとに基地局101−4の通信可能半径を算出する。通信可能半径の算出は、一般に知られている電波の伝搬損失の式を用いて行う。例えば奥村−秦モデルを用いて次のように算出する。
【0032】
ここで、基地局101−4は市街地に新設されたものとする。奥村−秦モデルでは、市街地をモデルとした基準特性の近似式は式1であり、
(式1)
Lb=69.55+26.16×log(f)−13.82×log(h1)−{(1.1×log(f)−0.7)×h2−(1.56×log(f)−0.8)}+(44.9−6.55×log(h1))×log(R)
ここで、
Lb:伝搬損失(dB)
f:周波数(MHz)
h1:基地局アンテナ高(m)
h2:移動局アンテナ高(m)
R:伝搬距離(km)
である。
【0033】
式1のLb、f、h1、h2に値を与え、Rについて解くと、それが通信可能半径となる。基地局101−4の送信電力値を40dBm、基地局アンテナゲインを10dBi、移動局アンテナゲインを0dBi、ゲイン補正値を0dBm、移動局の許容受信感度を−70dBmとした場合、許容伝搬損失=送信電力値+基地局アンテナゲイン+移動局アンテナゲイン+ゲイン補正値−移動局の許容受信感度=40+10+0+0−(−70)=120dBであるのでLb=120(dB)となる。この際、送信電力値は隣接基地局情報要求メッセージ(821)に含まれていた値を用いる。また、基地局アンテナゲイン、移動局アンテナゲイン、ゲイン補正値、移動局の許容受信感度は固定値として管理装置102に記憶されているものとする。ゲイン補正値は、受信技術としてレイク合成のようにゲインを得られる技術を用いたときにそのゲインを加味するため等の目的で用いる。f=800(MHz)とする。これはシステムが使用する電波の周波数であり、固定値として管理装置102に記憶されているものとする。h1=30(m)とする。これは隣接基地局情報要求メッセージ(821)に含まれていた値を用いる。h2=1(m)とする。これは固定値として管理装置102に記憶されているものとする。これらを式1に代入すると、R≒0.66kmとなる。すなわち、基地局101−4の通信可能半径は0.66kmとなる。
【0034】
なお、奥村−秦モデルでは、市街地モデルの式以外にも開放地、郊外、大都市などのモデルの式も用意されているため、あらかじめ自基地局の立地環境がどのモデルに合致するかを示すモデル情報を自基地局情報テーブルに記憶させておき、要求手順801において隣接基地局情報要求メッセージ(821)の中にそのモデル情報を含め、通信可能半径算出手順802においてそのモデル情報が示すモデルの式を用いて算出することにより、市街地以外の場合についても通信可能半径を算出することができる。
【0035】
管理装置102は、通信可能半径算出後、基地局101−4の識別子、IPアドレス、位置情報、送信電力値、通信可能半径を基地局情報テーブル301に記憶する。以上が通信可能半径算出手順(802)である。
【0036】
この段階で、管理装置102の基地局情報テーブル301は図3の301−bのようになる。また、実際の地図上での基地局101−1、101−2、101−3、101−4の位置と通信可能半径の関係は図9のようになったものとする。
【0037】
(決定手順803)
管理装置102は処理部202において、基地局情報テーブル301に記憶されている基地局101−4の位置情報と基地局101−1の位置情報をもとに基地局101−4と基地局101−1との距離を算出し、更に基地局情報テーブル301に記憶されている基地局101−4の通信可能半径と基地局101−1の通信可能半径の和を算出し、両算出結果を比較する。その結果は図9に示すように距離が通信可能半径の和より小さいため、基地局101−1と基地局101−4を互いに隣接基地局であると決定する。また、同様に基地局101−4と基地局101−2について両者の距離と両者の通信可能半径の和を比較する。その結果は図9に示すように、距離が通信可能半径の和より大きいため、基地局101−2と基地局101−4は互いに隣接基地局としない。また、同様に基地局101−4と基地局101−3について両者の距離と両者の通信可能半径の和を比較する。その結果は図9に示すように、距離が通信可能半径の和より小さいため、基地局101−3と基地局101−4を互いに隣接基地局であると決定する。
【0038】
(応答手順804)
管理装置102は送受信部201から基地局101−4へ、基地局101−1と基地局101−3それぞれの識別子とIPアドレスを含めた隣接基地局情報応答メッセージ(822)を返信する。
【0039】
(記憶手順 805)
基地局101−4は保守網側送受信部502で隣接基地局情報応答メッセージ(822)を受信すると、基地局101−1と基地局101−3それぞれの識別子とIPアドレスを隣接基地局情報テーブルに記憶する。
この段階で、基地局101−4の隣接基地局情報テーブルは図7の701−4bのようになる。
【0040】
(更新要求手順806)
管理装置102は送受信部201から基地局101−1へ、基地局101−4の識別子とIPアドレスを含めた更新要求メッセージ1(823)を送信する。また、基地局101−3へ、基地局101−4の識別子とIPアドレスを含めた更新要求メッセージ2(824)を送信する。
【0041】
(更新手順1 807)
基地局101−1は更新要求メッセージ1(823)を受信すると、基地局101−4の識別子とIPアドレスを隣接基地局情報テーブルに記憶する。
この段階で、基地局101−1の隣接基地局情報テーブルは図7の701−1bのようになる。
【0042】
(更新手順2 808)
基地局101−3は更新要求メッセージ2(824)を受信すると、基地局101−4の識別子とIPアドレスを隣接基地局情報テーブルに記憶する。この段階で、基地局101−3の隣接基地局情報テーブルは図7の701−3bのようになる。
【0043】
以上において、基地局101−4の設置時に、基地局101−4の隣接基地局の決定とそれら隣接基地局の情報の設定が自動で行われること、および、基地局101−4の隣接基地局となった基地局101−1の隣接基地局情報の更新と、同様に基地局101−4の隣接基地局となった基地局101−3の隣接基地局情報の更新が自動で行われることを例示した。
【実施例2】
【0044】
実施例2は、実施例1において基地局101−4の構成が図10のようにGPS受信機を搭載しておらず、代わりにユーザインタフェースとユーザインタフェース制御部1001を搭載した構成であった場合について、ユーザインタフェースから入力された情報をもとに位置情報を取得し、自動で隣接基地局の情報を設定する実施例である。
【0045】
基地局101−4の起動前の自基地局情報テーブル1601は図11の1601−aのようになっている。すなわち、識別子、送信電力値があらかじめ記憶されている。
【0046】
基地局101−4は、起動後、ユーザインタフェース制御部によりユーザインタフェースを通してユーザに対し、基地局のアンテナの高さの入力を求め、更に、基地局の位置情報または基地局が設置された住所のいずれかの入力を求める。
ユーザは、基地局のアンテナの高さを入力し、また、位置情報が分かる場合は位置情報を入力し、分からない場合は住所を入力する。以降、位置情報を入力された場合、住所を入力された場合それぞれについて説明する。
【0047】
(位置情報を入力された場合)
基地局101−4は、入力されたアンテナの高さと位置情報を自基地局情報テーブル1601に記憶する。そして、保守網103に接続された際に、自動的に管理装置から自基地局のIPアドレスを取得し、自基地局情報テーブル1601に記憶する。この時点で、自基地局情報テーブル1601は図11の1601−bのようになる。以降は、実施例1の要求手順(801)以降の手順を同様に実施することにより、自動で隣接基地局情報の設定が行われ、実施例1と同じ結果が得られる。
【0048】
(住所を入力された場合)
住所を入力された場合、基地局101−4は、まず、入力されたアンテナの高さを自基地局情報テーブル1601に記憶する。それから、住所をもとに位置情報を特定するアプリケーションを実行することにより、入力された住所に対応する位置情報を特定し、自基地局情報テーブル1601に記憶する。そして、保守網103に接続された際に、自動的に管理装置102から自基地局のIPアドレスを取得し、自基地局情報テーブル1601に記憶する。この時点で、自基地局情報テーブル1601は図11の1601−bのようになる。以降は、実施例1の要求手順(801)以降の手順を同様に実施することにより、自動で隣接基地局情報の設定が行われ、実施例1と同じ結果が得られる。
【実施例3】
【0049】
実施例3は、実施例2で住所を入力された場合の別の例であり、住所をもとに位置情報を特定するアプリケーションが基地局101ではなく管理装置102に搭載されている場合の例である。
【0050】
基地局101−4は、保守網103に接続された際に、自動的に管理装置102から自基地局のIPアドレスを取得し、自基地局情報テーブル1601に記憶した後、入力された住所を含めた位置情報要求メッセージを管理装置102に送信する。管理装置102は送受信部201で位置情報要求メッセージを受信すると、住所をもとに位置情報を特定するアプリケーションを実行することにより、位置情報要求メッセージに含まれている住所に対応する位置情報を特定し、その位置情報を含めた位置情報応答メッセージを基地局101−4に返信する。基地局101−4は保守網側送受信部502で位置情報応答メッセージを受信すると、その位置情報応答メッセージに含まれている位置情報を自基地局情報テーブル1601に記憶する。この時点で、自基地局情報テーブル1601は図11の1601−bのようになる。以降は、実施例1の要求手順(801)以降の手順を同様に実施することにより、自動で隣接基地局情報の設定が行われ、実施例1と同じ結果が得られる。
【実施例4】
【0051】
実施例1では、電波の送信電力をもとに通信可能半径を算出する機能が管理装置102の処理部202に搭載されていた。それに対し、実施例4は、電波の送信電力をもとに通信可能半径を算出する機能が管理装置102の処理部202に搭載されておらず、代わりに基地局101が図12のように処理部1201を含む構成の基地局であり、当該処理部1201に電波の送信電力をもとに通信可能半径を算出する機能が搭載されている場合の例である。
【0052】
基地局101−4の起動前の自基地局情報テーブル2601は図13の2601−aのようになっている。すなわち、識別子、送信電力値、アンテナの高さがあらかじめ記憶されている。
【0053】
基地局101−4は、起動されると、GPS受信部501により自動的に位置情報を取得し、自基地局情報テーブル2601に記憶する。基地局101−4はまた、保守網103に接続されると、自動的に管理装置102から自基地局のIPアドレスを取得し、自基地局情報テーブル2601に記憶する。このIPアドレスを自動で取得する方法は、一般に広く用いられているDHCPを利用することにより可能であるため、ここでは詳細は記載しない。更に、基地局101−4は処理部1201において、自基地局情報テーブル2601に記憶されている送信電力値をもとに通信可能半径を算出し、自基地局情報テーブル2601に記憶する。通信可能半径の算出は、実施例1の通信可能半径算出手順802と同様に、例えば奥村−秦モデルを用いて行う。この時点で、基地局101−4の自基地局情報テーブルは図13の2601−bのようになる。
【0054】
基地局101−4は、位置情報と自基地局のIPアドレスを取得し、通信可能半径を算出すると、図14に示す、隣接基地局の自動決定および隣接基地局情報の自動設定をするためのシーケンスを開始する。以降、このシーケンスについて、実施例1の図8のシーケンスとの差分を説明する。
【0055】
(要求手順2801)
基地局101−4は、自基地局情報テーブル2601に記憶されている自基地局の識別子とIPアドレスと位置情報と送信電力値とアンテナの高さと通信可能半径を含めた隣接基地局情報要求メッセージ(2821)を、保守網側送受信部502から管理装置102に送信する。
【0056】
(登録手順2802)
管理装置102は、送受信部201で隣接基地局情報要求メッセージ(2821)を受信すると、基地局101−4の識別子、IPアドレス、位置情報、送信電力値、通信可能半径を基地局情報テーブル301に記憶する。
【0057】
この段階で、管理装置102の基地局情報テーブル301は図3の301−bのようになる。また、実際の地図上での基地局101−1、101−2、101−3、101−4の位置と通信可能半径の関係は図9のようになったものとする。以降は、実施例1の要求手順(803)以降の手順を同様に実施することにより、自動で隣接基地局情報の設定が行われ、実施例1と同じ結果が得られる。
【符号の説明】
【0058】
101…基地局、102…管理装置、103…保守網、201…送受信部、202…処理部、203…記憶部、301…基地局情報テーブル、501…GPS受信部、502…保守網側送受信部、503…記憶部、601…自基地局情報テーブル、701…隣接基地局情報テーブル、1001…ユーザインタフェース制御部、1201…処理部、1601…自基地局情報テーブル、2601…自基地局情報テーブル
【特許請求の範囲】
【請求項1】
基地局とネットワークを通して接続される管理装置であって、
各基地局から自基地局の識別子と、位置情報と、電波の送信電力値の情報を受信する受信部と、
前記受信部により受信した電波の送信電力値を基に各基地局の通信可能半径を算出する通信半径算出部と、
第1の基地局から隣接基地局に関する情報の要求を受けると、前記通信半径算出部により算出した通信可能半径と、前記受信部により受信した位置情報とから、前記第1の基地局と第2の基地局との2つの基地局間の距離が2つの基地局の通信可能半径の和よりも小さいか否かを判断し、小さい場合には2つの基地局を互いに隣接基地局であると決定する隣接基地局決定部と、
前記第1の基地局に対し、前記隣接基地局決定部により決定した前記第1の基地局の隣接基地局に関する情報を送信する送信部とを有することを特徴とする管理装置。
【請求項2】
請求項1記載の管理装置であって、
前記送信部は、前記第1の基地局の隣接基地局であると決定された基地局に対し、第1の基地局の隣接基地局である旨の情報を送信することを特徴とする管理装置。
【請求項3】
基地局の隣接基地局を決定する隣接基地局決定方法であって、
各基地局から自基地局の識別子と、位置情報と、電波の送信電力値の情報を受信するステップと、
受信した電波の送信電力値を基に各基地局の通信可能半径を算出するステップと、
第1の基地局から隣接基地局に関する情報の要求を受けると、算出した通信可能半径と、受信した位置情報とから、前記第1の基地局と第2の基地局との2つの基地局間の距離が2つの基地局の通信可能半径の和よりも小さいか否かを判断し、小さい場合には2つの基地局を互いに隣接基地局であると決定するステップと、
前記第1の基地局に対し、前記隣接基地局決定部により決定した前記第1の基地局の隣接基地局に関する情報を送信するステップとを有することを特徴とする隣接基地局決定方法。
【請求項4】
請求項3記載の隣接基地局決定方法であって、
前記第1の基地局の隣接基地局であると決定された基地局に対し、第1の基地局の隣接基地局である旨の情報を送信するステップとを有することを特徴とする隣接基地局決定方法。
【請求項1】
基地局とネットワークを通して接続される管理装置であって、
各基地局から自基地局の識別子と、位置情報と、電波の送信電力値の情報を受信する受信部と、
前記受信部により受信した電波の送信電力値を基に各基地局の通信可能半径を算出する通信半径算出部と、
第1の基地局から隣接基地局に関する情報の要求を受けると、前記通信半径算出部により算出した通信可能半径と、前記受信部により受信した位置情報とから、前記第1の基地局と第2の基地局との2つの基地局間の距離が2つの基地局の通信可能半径の和よりも小さいか否かを判断し、小さい場合には2つの基地局を互いに隣接基地局であると決定する隣接基地局決定部と、
前記第1の基地局に対し、前記隣接基地局決定部により決定した前記第1の基地局の隣接基地局に関する情報を送信する送信部とを有することを特徴とする管理装置。
【請求項2】
請求項1記載の管理装置であって、
前記送信部は、前記第1の基地局の隣接基地局であると決定された基地局に対し、第1の基地局の隣接基地局である旨の情報を送信することを特徴とする管理装置。
【請求項3】
基地局の隣接基地局を決定する隣接基地局決定方法であって、
各基地局から自基地局の識別子と、位置情報と、電波の送信電力値の情報を受信するステップと、
受信した電波の送信電力値を基に各基地局の通信可能半径を算出するステップと、
第1の基地局から隣接基地局に関する情報の要求を受けると、算出した通信可能半径と、受信した位置情報とから、前記第1の基地局と第2の基地局との2つの基地局間の距離が2つの基地局の通信可能半径の和よりも小さいか否かを判断し、小さい場合には2つの基地局を互いに隣接基地局であると決定するステップと、
前記第1の基地局に対し、前記隣接基地局決定部により決定した前記第1の基地局の隣接基地局に関する情報を送信するステップとを有することを特徴とする隣接基地局決定方法。
【請求項4】
請求項3記載の隣接基地局決定方法であって、
前記第1の基地局の隣接基地局であると決定された基地局に対し、第1の基地局の隣接基地局である旨の情報を送信するステップとを有することを特徴とする隣接基地局決定方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2010−206740(P2010−206740A)
【公開日】平成22年9月16日(2010.9.16)
【国際特許分類】
【出願番号】特願2009−52811(P2009−52811)
【出願日】平成21年3月6日(2009.3.6)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
【公開日】平成22年9月16日(2010.9.16)
【国際特許分類】
【出願日】平成21年3月6日(2009.3.6)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
[ Back to top ]