
集荷システムおよび集荷方法
【課題】物品倉庫等の物品収集場において目的の物品を集荷する手間を削減する。
【解決手段】撮像部(101)により撮像された撮像画像中において物品収集場に収集されている物品を特定するためのQRコード(登録商標)等の物品特定情報を検出する。物品特定情報が検出された場合には、物品特定情報の撮像画像中における位置から物品収集場内における物品の位置を決定し、検出された物品特定情報と、決定された物品の位置を示す位置情報とを関連付けた物品情報を保持しておく。物品情報を参照して、集荷対象物品の物品特定情報に対応する集荷対象物品の位置情報を取得する。そして、取得した位置情報に基づいて、レーザ出力部(108)から集荷対象物品の位置に対してレーザを照射することにより集荷作業者に集荷対象物品を認識せしめるように提示する。
【解決手段】撮像部(101)により撮像された撮像画像中において物品収集場に収集されている物品を特定するためのQRコード(登録商標)等の物品特定情報を検出する。物品特定情報が検出された場合には、物品特定情報の撮像画像中における位置から物品収集場内における物品の位置を決定し、検出された物品特定情報と、決定された物品の位置を示す位置情報とを関連付けた物品情報を保持しておく。物品情報を参照して、集荷対象物品の物品特定情報に対応する集荷対象物品の位置情報を取得する。そして、取得した位置情報に基づいて、レーザ出力部(108)から集荷対象物品の位置に対してレーザを照射することにより集荷作業者に集荷対象物品を認識せしめるように提示する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、物品倉庫等の物品収集場における集荷作業において集荷対象物品を検知するための技術に関する。
【背景技術】
【0002】
従来、物品倉庫等のように複数の物品が保管されている場所において、集荷したい物品を探し出す場合、作業者が各物品に付されている商品名や商品コード等を目視して探し出していた。また、この際、作業者が集荷対象の物品の商品名や商品コード等が書かれているメモを手に持ち、そのメモを見ながら集荷作業をしていたが、メモを読み間違えたり、手に持っているメモが集荷作業に邪魔となる等の問題があった。
【0003】
また、物品に付されているバーコードをバーコードリーダーで読みながら集荷対象の物品であるか確認する方法等もあるが、物品ごとにバーコードをリーダーに読み込ませる作業は煩雑であり、多大な時間を要していた。
このような問題に対し、集荷対象の物品の商品コード等を音声で作業者に伝達する音声ピッキングシステムが存在する(例えば、特許文献1)。これらの音声ピッキングシステムによれば、作業者は頭部に装着したヘッドセットのスピーカーから商品コード等を聞きながら集荷作業を行うことができる。これにより、ハンズフリーとなるため集荷作業が容易になり、物品の商品コード等を読み間違えるミス等も低減させることができる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許4261583号
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1のような音声ピッキングシステムでは、メモを読んだりバーコードリーダーを操作する必要がないため、作業を簡略化することができる。しかしながら、作業者は音声で指示のあった物品を目視で探し出さなくてはならず、物品倉庫に保管されている複数の物品の中から集荷したい物品を探し出すのは、大変な労力と多大な時間を要していた。
本発明は、上記課題に鑑みてなされたものであり、物品倉庫等において目的の物品を容易に集荷することが可能なレーザーピッキング装置、レーザーピッキングシステム、および物品検出方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本発明の一態様は、撮像部と、前記撮像部により撮像された撮像画像中において物品収集場に収集されている物品を特定するための情報である物品特定情報を検出する物品特定情報検出部と、前記物品特定情報が検出された場合には、前記物品特定情報の前記撮像画像中における位置から、前記物品収集場内における前記物品の位置を決定する位置決定部と、検出された前記物品特定情報と、決定された前記物品の位置を示す位置情報とを関連付けた物品情報を保持する物品情報保持部と、集荷対象物品の前記物品特定情報を保持する集荷情報保持部と、前記物品情報保持部に保持されている前記物品情報から、前記集荷対象物品の前記物品特定情報に対応する前記集荷対象物品の前記位置情報を取得する位置情報取得部と、取得された前記位置情報から、前記集荷対象物品の位置を集荷作業者に視認可能に提示することで、前記集荷作業者に前記集荷対象物品が集荷対象であることを認識せしめる位置提示部と、を有する集荷システムである。
【0007】
また、本発明の他の態様は、情報端末と、前記情報端末と通信を行う携帯型端末と、前記携帯型端末と近距離無線通信を行う集荷指示装置と、を有する集荷システムであって、前記情報端末は、前記集荷指示装置から送信される前記撮像画像中において物品収集場に収集されている物品を特定するための情報である物品特定情報を検出する物品特定情報検出部と、前記物品特定情報が検出された場合には、前記物品特定情報の前記撮像画像中における位置から、前記物品収集場内における前記物品の位置を決定する位置決定部と、検出された前記物品特定情報と、決定された前記物品の位置を示す位置情報とを関連付けた物品情報を保持する物品情報保持部と、集荷対象物品の前記物品特定情報を保持する集荷情報保持部と、前記物品情報保持部に保持されている前記物品情報から、前記集荷対象物品の前記物品特定情報に対応する前記集荷対象物品の前記位置情報を取得する位置情報取得部と、取得された前記位置情報を前記携帯型端末に送信する第1の位置情報送信部と、を有し、前記携帯型端末は、集荷作業者が携行する端末であって、前記情報端末から送信される前記位置情報を受信して保持する位置情報保持部と、前記位置情報保持部に保持されている前記位置情報を前記近距離無線通信にて前記集荷指示装置に送信する第2の位置情報送信部と、を有し、前記集荷指示装置は、撮像部と、前記撮像部により撮像された撮像画像を前記情報端末に送信する撮像画像送信部と、前記携帯型端末から送信される前記位置情報から、前記集荷対象物品の位置を、前記集荷作業者に視認可能に提示することで、前記集荷作業者に前記集荷対象物品が集荷対象であることを認識せしめる位置提示部と、を有することを特徴とする集荷システムである。
【0008】
また、本発明の他の態様は、撮像部と、物品特定情報検出部と、位置決定部と、物品情報保持部と、集荷情報保持部と、位置情報取得部と、位置情報取得部と、位置提示部と、を有する集荷システムが実行する集荷方法であって、前記撮像部が、撮像を行う第1のステップと、前記物品特定情報検出部が、前記撮像部により撮像された撮像画像中において物品収集場内に収集されている物品を特定するための情報である物品特定情報を検出する第2のステップと、前記位置決定部が、前記物品特定情報が検出された場合には、前記物品特定情報の前記撮像画像中における位置から、前記物品収集場内における前記物品の位置を決定する第3のステップと、前記物品情報保持部が、検出された前記物品特定情報と、決定された前記物品の位置を示す位置情報とを関連付けた物品情報を記憶して保持する第4のステップと、前記位置情報取得部が、前記集荷情報保持部から集荷対象物品の前記物品特定情報を読み出す第5のステップと、前記位置情報取得部が、前記物品情報保持部に保持されている前記物品情報から、読み出された前記集荷対象物品の前記物品特定情報に対応する前記集荷対象物品の前記位置情報を取得する第6のステップと、前記位置提示部が、取得された前記位置情報から、前記集荷対象物品の位置を集荷作業者に認識可能に提示することで、前記集荷作業者に前記集荷対象物品が集荷対象であることを認識せしめる第7のステップと、を含むことを特徴とする集荷方法である。
【0009】
また、本発明の他の態様は、物品収集場に収集されている物品の中から、前記物品収集場内における位置を集荷作業者に提示すべき集荷対象物品を指定する集荷対象物品指定部と、指定された前記集荷対象物品の位置を示す位置情報を出力する位置情報出力部と、出力された前記位置情報から、前記集荷対象物品の位置を、前記集荷作業者に視認可能に提示することで、前記集荷作業者に前記集荷対象物品が集荷対象であることを認識せしめる位置提示部と、を有する集荷システムである。
【発明の効果】
【0010】
本発明によれば、集荷作業者は物品倉庫等の物品収集場において目的の物品を容易に集荷することが可能となり、集荷作業の労力を省き、作業時間を大幅に短縮することができる。
【図面の簡単な説明】
【0011】
【図1】本発明の第1の実施形態に係る集荷システムの概要を示す図である。
【図2】本発明の第1の実施形態に係る集荷補助装置の構成の一例を示す機能ブロック図である。
【図3】物品特定情報を検出して物品特定情報の位置を決定する方法の具体例を示す図である。
【図4】物品特定情報を検出して物品特定情報の位置を決定する方法の具体例を示す図である。
【図5】本発明の第1の実施形態に係る物品情報保持部に保持される物品情報の具体例を示す図である。
【図6】本発明の第1の実施形態に係る集荷情報保持部に保持される集荷対象物品の物品特定情報の具体例を示す図である。
【図7】本発明の第1の実施形態に係る位置提示部によって集荷対象物品の位置を提示する方法の具体例を示す図である。
【図8】本発明の第1の実施形態に係る集荷補助装置における処理の一例を示すフロー図である。
【図9】本発明の第1の実施形態に係る集荷補助装置における処理の一例を示すフロー図である。
【図10】本発明の第2の実施形態に係る集荷システムの概要を示す図である。
【図11】本発明の第2の実施形態に係る集荷システムの構成の一例を示す機能ブロック図である。
【図12】本発明の第2の実施形態に係る集荷指示装置のカメラにおける処理の一例を示すフロー図である。
【図13】本発明の第2の実施形態に係る情報端末における処理の一例を示すフロー図である。
【図14】本発明の第2の実施形態に係る携帯型端末における処理の一例を示すフロー図である。
【図15】本発明の第2の実施形態に係る集荷指示装置における処理の一例を示すフロー図である。
【図16】本発明の第3の実施形態に係る集荷システムの概要を示す図である。
【図17】本発明の第3の実施形態に係る集荷システムの構成の一例を示す機能ブロック図である。
【発明を実施するための形態】
【0012】
以下、本発明の実施形態について、図面を参照しながら説明する。なお、以下に説明する各実施形態においては、一例として、物品倉庫に収容されている多数の物品から集荷したい物品を集荷する場合を想定して説明するが、本発明はこのような場面に限定されるものではない。物品が多数収集されている物品収集場において特定の物品を探し出したい場面であれば、様々な物品収集場において適用可能である。例えば、多数の商品が陳列されている商品売場で特定の商品を探し出したい場合や、港などで沢山の車両が配列されており、その中から運搬すべき車両を探して収容対象とする場合等、様々な場面に適用できる。
なお、以下の説明において参照する各図では、他の図と同等部分は同一符号によって示す。
【0013】
(第1実施形態)
(集荷システムの概要)
まず、図1を参照して、本実施形態に係る集荷システムの概要について説明する。
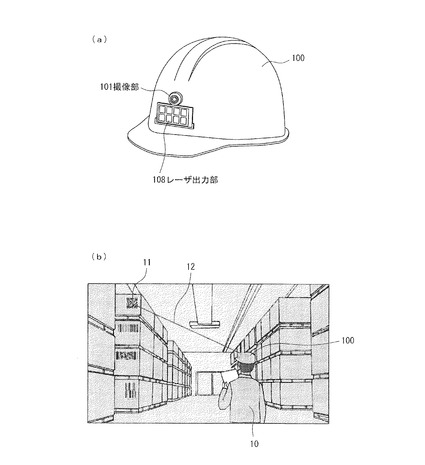
図1(a)は、本実施形態に係る集荷システムに用いられる集荷補助装置の外観を示す図である。集荷補助装置100は、集荷作業を行う作業者の頭部に装着可能なヘルメット型になっている。また、集荷補助装置100は、周辺を撮像するカメラ(撮像部)101と、任意の場所に可視光レーザを照射することが可能なレーザ出力部108とを備えている。図1(b)に示されるように、集荷作業を行う作業者10は、物品が収容されている物品倉庫において集荷作業を行う際には、ヘルメット型の集荷補助装置100を頭部に装着して作業を行う。また、撮像部101は、ヘルメット型の集荷補助装置100の前方に備えられており、作業者の目線と同一方向の周辺の画像をリアルタイムに逐次撮像する。
【0014】
また、集荷補助装置100は内部に画像処理機能を備えており、撮像部101で撮像された画像において、集荷すべき物品を特定するためのQRコード、バーコード、文字コード等が存在するか探索する。集荷する物品11のQRコード等を検出した場合には、検出したQRコード等の撮像画像中における位置から集荷対象の物品11の位置を判断し、図1(b)に示されるように、集荷対象の物品11の位置に向けてレーザ出力部108からレーザ12を照射する。
これにより、作業者は集荷すべき物品の位置を簡単に知ることができ、従来、目視でQRコード等を確認しながら物品を探していた場合と比較して、各段に集荷作業の効率が向上する。
【0015】
(集荷補助装置の構成)
以下、図2を参照しながら、本実施形態に係る集荷補助装置100の構成例について説明する。
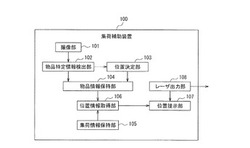
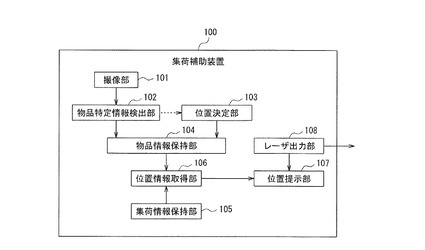
図2に示されるように、集荷補助装置100は、撮像部101と、物品特定情報検出部102と、位置決定部103と、物品情報保持部104と、集荷情報保持部105と、位置情報取得部106と、位置提示部107と、レーザ出力部108と、を有する。
撮像部101は、物品が収集されている物品収集場内を撮像する。本実施形態においては、撮像部101は物品倉庫内を撮像する。撮像部101で撮像された画像の画像データは、集荷補助装置100の内部に備えられているRAM(Random Access Memory)等のメモリに保存される。
【0016】
物品特定情報検出部102は、撮像部101により撮像された撮像画像中において物品収集場に収集されている物品を特定するための情報である物品特定情報を検出する。物品特定情報は、物品を一意に識別できるものであればよい。例えば、QRコード、バーコード、商品コードや商品番号等の文字列等が挙げられる。また、物品の大きさが物品ごとに異なる場合には、物品の大きさを物品特定情報として採用してもよい。また、物品の形状、色、等が物品ごとに異なる場合には、物品の形状、色、等を物品特定情報として採用することができる。さらに、これらの複数種類の情報を物品特定情報としてもよいし、複数種類の情報を組み合わせたものを物品特定情報としてもよい。なお、本実施形態においては、物品特定情報はQRコードであるとして説明する。
【0017】
位置決定部103は、物品特定情報検出部102において物品特定情報が検出された場合には、物品特定情報の撮像画像中における位置から、物品収集場内における物品の位置を決定する。ここで、「物品の位置」とは、物品そのものの位置のみだけでなく、物品に付されているQRコード等の物品特定情報の位置を物品の位置としてもよい。なぜならば、集荷作業者が集荷したい物品が物品収集場内のいずれの位置にあるかを知ることができればよく、物品特定情報が物品収集場内のいずれの位置にあるのかが分かれば、それは、すなわち物品の位置が分かることと等価だからである。
【0018】
また、物品の位置を決定する際には、物品特定情報の撮像画像中における位置そのものを「物品の位置」とみなしてもよいし、物品特定情報の撮像画像中における位置から、作業場における物品(もしくは物品特定情報)の実際の位置を換算し、この換算結果を「物品の位置」とみなしてもよい。さらに、「位置」とは、相対的位置(例えば、特定情報の撮像画像における撮像方向に対する相対位置)でもよいし、絶対的位置(例えば、特定情報の撮像画像における絶対位置)でもよい。本実施形態においては、物品特定情報の撮像画像中における絶対位置そのものを「物品の位置」として採用する。
【0019】
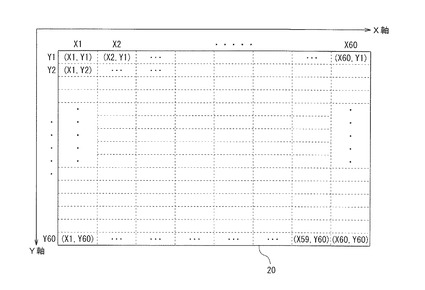
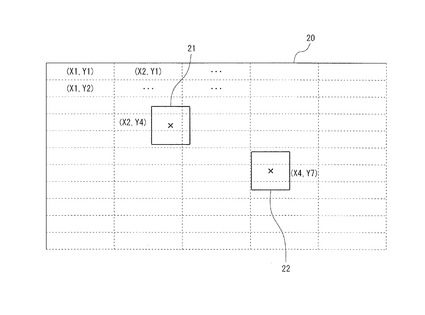
図3は、物品特定情報を検出して物品特定情報の位置を決定する方法の具体例を示す図である。物品特定情報検出部102は、例えば、撮像部101で撮像される撮像画像20に対して横をX軸、縦をY軸とするXY座標軸を有している。図3では、撮像画像20の全体を、横60×縦60のエリアに分割し、各エリアを、(X1,Y1), (X1,Y2), ・・・ , (X60,Y60) としている。
【0020】
そして、例えば、図4に示されるように撮像画像20にてQRコード(物品特定情報)21、22が認識されたとすると、QRコード21、22の中心がいずれのエリアにあるかを判断し、これをQRコードの位置として認識する。図4の例では、QRコード21の位置は(X2,Y4)、QRコード22の位置は(X4,Y7)である。
また、物品特定情報が文字列である場合には、例えば、文字列全体を内側に含むように囲んだ四角形の中心の位置を、物品特定情報の位置としてもよい。物品特定情報が物品の大きさや物品の形状である場合には、例えば、物品全体を内側に含むように囲んだ円の中心の位置を物品特定情報の位置としてもよい。
【0021】
なお、図3および図4においては物品特定情報の位置を2次元(XY座標上)で捉えているが、3次元で捉えるようになっていてもよい。例えば、全ての物品に付されるQRコード等の物品特定情報の実物大の寸法があらかじめ定められた大きさに統一されている場合には、この実物の寸法と、撮像画像中でのQRコード等の大きさとによって、そのQRコード等が撮像部101からどれくらいの距離に存在するものであるかを算出可能である。これにより、物品特定情報の撮像画像中(2次元平面上)における位置のみならず、さらに奥行き方向における位置も把握することができる。
【0022】
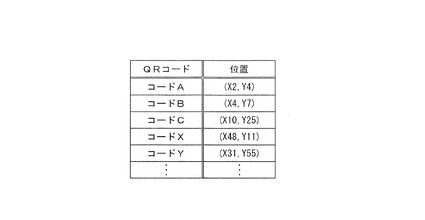
物品情報保持部104は、物品特定情報検出部102において検出された物品特定情報と、位置決定部103において決定された物品の位置を示す位置情報とを関連付けた物品情報を保持する。
図5は、物品情報保持部104にて保持される物品情報の具体例を示す図である。図5に示されるように、物品情報保持部104は、撮像画像中において検出されたQRコード(物品特定情報)と、撮像画像中におけるQRコードの位置(物品の位置)とを関連づけて、データベース等の形式でRAM等のメモリに記憶して保持する。
【0023】
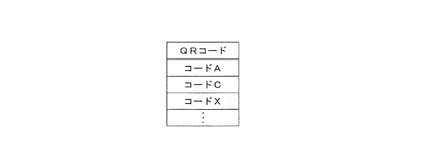
集荷情報保持部105は、集荷対象の物品である集荷対象物品の物品特定情報を保持する。図6は、集荷情報保持部105に保持される集荷対象物品の物品特定情報の具体例を示す図である。図6では、集荷対象物品のQRコード(物品特定情報)として、「コードA」、「コードC」、「コードX」が指定されており、これは、「コードA」、「コードC」、「コードX」のQRコードが付されている物品が集荷すべき物品であることを意味する。
【0024】
集荷対象物品の物品特定情報は、例えば、集荷作業を行う前にあらかじめヘルメット型の集荷補助装置100の内部のROM(Read Only Memory)やRAM等のメモリに記憶される。
位置情報取得部106は、物品情報保持部104に保持されている物品情報から、集荷対象物品の物品特定情報に対応する集荷対象物品の位置情報を取得する。例えば、図5および図6の例であれば、位置情報取得部106は、図6で指定されているQRコード「コードA」、「コードC」、「コードX」を読み出した後、図5の物品情報を参照し、「コードA」、「コードC」、「コードX」の位置として、(X2,Y4), (X10,Y25), (X48,Y11) を取得する。
【0025】
位置提示部107は、位置情報取得部106において取得された位置情報から、集荷対象物品の位置を集荷作業者(集荷補助装置100のユーザ)に視認可能に提示することで、集荷作業者に、その集荷対象物品が集荷対象であることを認識せしめる。本実施形態においては、位置提示部107は、レーザ出力部108にて出力される可視光レーザを用いて集荷対象物品の位置を集荷補助装置100の集荷作業者に提示するが、集荷対象物品の位置の提示方法はこれに限定されるものではない。他の方法により集荷対象物品の位置を提示するようになっていてもよい。
【0026】
可視光レーザを用いて集荷対象物品の位置を提示する方法としては、例えば、図1(b)に示されるようにレーザを集荷対象物品に照射することで集荷対象物品の位置を提示する方法が挙げられる。上述した図5および図6の例であれば、位置情報取得部106が取得したQRコード「コードA」、「コードC」、「コードX」の位置である座標(X2,Y4), (X10,Y25), (X48,Y11) に対してレーザ出力部108がレーザを照射する。なお、レーザ出力部108は、物品特定情報検出部102が保持しているものと同じXY座標を有し、このXY座標をもとにしてレーザの照射位置を合わせる。
【0027】
また、レーザ出力部108が可視光レーザを照射するのは、集荷対象物品の特定情報であってもよいし、集荷対象物品の特定情報以外の部分であってもよい。例えば、物品の外箱の大きさ、QRコード等(物品特定情報)が付される外箱での位置、および物品の陳列される方向が同じであれば、集荷対象物品の外箱におけるQRコード以外の領域がどの位置にどれくらいの大きさであるかは判断することができる。
【0028】
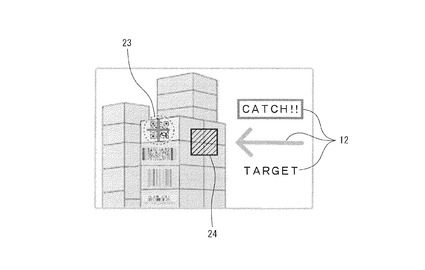
また、本実施形態においては、撮像部101はヘルメット型集荷補助装置100の正面に固定されており、集荷補助装置100の集荷作業者の目線と同一方向の撮像画像を撮像する。よって、撮像部101が撮像する撮像画像は集荷作業者の視界とほぼ同等となる。そこで、図7に示されるように撮像画像中の集荷対象物品のQRコード23の位置が撮像画像の中央エリア24から外れている場合には、作業場の壁等にレーザ12で矢印等の図形、文字(方向を表す文字列等)、画像を線により模写した線画等を描画してQRコード23の方向を示すことによって集荷作業者に集荷対象物品の位置を提示するようになっていてもよい。これにより、集荷作業者は自分が向いている方向よりも矢印等で示される方向に集荷対象物品が存在することを知ることができる。
【0029】
なお、中央エリア24の設定は可変に設定できるようになっていてもよい。また、同様に撮像画像の中央の領域でなくとも、集荷対象物品のQRコード23の位置があらかじめ定められた所定の領域から外れていることをもって、作業場の壁等にレーザ12で矢印や文字を描画してQRコード23の方向を示すようになっていてもよい。
また、レーザ出力部108においてレーザの出力方向を制御する方法の一例としては、例えば、MEMS(Micro Electro Mechanical Systems)デバイスによりレーザの出力方向を変化させることができる。また、高性能MEMSを用いれば、所定の方向のみならず、全方位にレーザを出力することができる。
【0030】
(集荷補助装置における処理)
以下、図8および図9に示すフロー図を参照して、本実施形態に係る集荷補助装置100における処理例について説明する。
(処理フロー1)
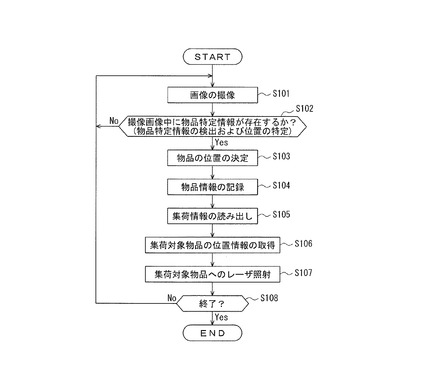
まず、図8の処理フローについて説明する。図8は、レーザを集荷対象物品に照射することで物品の位置を集荷作業者に提示する場合(図1(b))のフロー図である。なお、図8に示される集荷補助装置100での処理は、あらかじめ設定された時間間隔ごと(例えば数十ミリ秒間隔、リアルタイム等)に繰り返し実行される。
【0031】
撮像部101は、集荷補助装置100の周辺の画像を撮像する(ステップS101)。そして、物品特定情報検出部102は、ステップS101で撮像された撮像画像中に物品特定情報(QRコード等)が含まれているか判断する(ステップS102)。含まれていない場合には、ステップS101の処理が繰り返される。なお、撮像画像中に物品特定情報が含まれていない場合には、レーザ出力部108が“検出なし”等の文字を作業場の内壁等に描画することで、集荷作業者にその旨を通知するようになっていてもよい。これにより集荷作業者は集荷補助装置100の撮像部101を他の場所に向ける必要があることを知ることができる。なお、撮像画像中に物品特定情報が含まれている場合には、本ステップにおいて、物品特定情報の撮像画像中における位置も検出される。
【0032】
撮像画像中に物品特定情報が含まれている場合には、位置決定部103は、物品特定情報の撮像画像中における位置から物品の位置を決定する(ステップS103)。なお、ここで決定される物品の位置とは、ステップS103で検出された物品に付されている物品特定情報(QRコード等)の撮像画像中における位置そのものであってもよいし、物品特定情報の撮像画像中における位置から物品倉庫内における物品の実際の位置を換算したものであってもよい。物品情報保持部104は、ステップS102で特定された物品特定情報と、ステップS103で決定された物品の位置とを関連づけた物品情報を、メモリ等の記憶装置に記憶して保持する(ステップS104)。
【0033】
位置情報取得部106は、集荷情報保持部105が保持している集荷情報を読み出す(ステップS105)。そして、ステップS104にてメモリ等の記憶装置に記憶された物品情報を参照して、ステップS105で読み出した集荷情報に含まれている集荷対象物品の物品特定情報に対応する位置情報を取得する(ステップS106)。
位置提示部107は、ステップS106で取得した集荷対象物品の位置情報に応じて、集荷対象物品へレーザ出力部108からレーザを照射する(ステップS107)。
例えば集荷作業の中断・終了により集荷補助装置100の電源がOFFされる等の理由により終了するまで、以上の処理を繰り返す(ステップS108)。
【0034】
(処理フロー2)
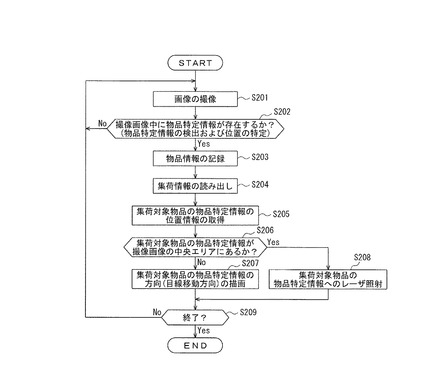
次に、図9の処理フローについて説明する。図9は、レーザで作業場の内壁等に矢印等を描画することによって集荷対象物品の位置を集荷作業者に提示する場合(図7)のフロー図である。なお、図9に示される集荷補助装置100での処理は、あらかじめ設定された時間間隔ごと(例えば数十ミリ秒間隔、リアルタイム等)に繰り返し実行される。
【0035】
撮像部101は、集荷補助装置100の周辺の画像を撮像する(ステップS201)。物品特定情報検出部102は、ステップS201で撮像された撮像画像中に物品特定情報(QRコード等)が含まれているか判断する(ステップS202)。含まれていない場合には、ステップS201の処理が繰り返される。なお、撮像画像中に物品特定情報が含まれていない場合には、レーザ出力部108が“検出なし”等の文字を作業場の内壁等に描画することで、集荷作業者にその旨を通知するようになっていてもよい。
【0036】
また、撮像画像中に物品特定情報が含まれている場合には、本ステップにおいて、物品特定情報の撮像画像中における位置も検出される。また、撮像画像中に物品特定情報が含まれている場合には、位置決定部103は、物品特定情報の撮像画像中における位置を物品の位置として決定する。
物品情報保持部104は、ステップS202で特定された物品特定情報と、その物品特定情報の位置とを関連づけた物品情報を、メモリ等の記憶装置に記憶して保持する(ステップS203)。
【0037】
位置情報取得部106は、集荷情報保持部105が保持している集荷情報を読み出す(ステップS204)。そして、ステップS203にてメモリ等の記憶装置に記憶された物品情報を参照して、ステップS204で読み出した集荷情報に含まれている集荷対象物品の物品特定情報に対応する位置情報を取得する(ステップS205)。
位置提示部107は、ステップS205で取得された集荷対象物品の物品特定情報が撮像画像の中央エリア内(例えば図7の中央エリア24内)にあるか判断する(ステップS206)。集荷対象物品の物品特定情報が撮像画像の中央エリア内にない場合には、位置提示部107は、作業場の内壁に矢印等をレーザで描画することにより集荷対象物品の物品特定情報の方向(集荷作業者が目線を移動すべき方向)を集荷作業者に提示する(ステップS207)。集荷対象物品の物品特定情報が撮像画像の中央エリア内にある場合には、位置提示部107は、集荷対象物品へレーザを照射する(ステップS208)。
【0038】
例えば集荷作業の中断・終了により集荷補助装置100の電源がOFFされる等の理由により終了するまで、以上の処理を繰り返す(ステップS209)。
図9に示される集荷方法は、レーザ出力部108がヘルメット型集荷補助装置100の正面に固定されている場合に有効である。このような構成の場合、レーザ出力部108を動作させる機構が不要となるため、ヘルメット型集荷補助装置100の構成が簡素化され低コストでシステムを構成できるが、そのような構成であっても、集荷作業者の集荷作業の手間を省く効果が十分に期待できる。
【0039】
(他の具体例)
(1)また、上記説明においては、撮像部101はヘルメット型集荷補助装置100の正面に固定されており、集荷補助装置100の集荷作業者の目線と同一方向の撮像画像を撮像することとしたが、これに限定されるものではない。集荷補助装置100の集荷作業者の目線と異なる方向の撮像画像を撮像し、位置決定部103は、撮像部101の撮像方向と、物品特定情報の撮像画像中における位置とから、物品の位置を決定するようになっていてもよい。
【0040】
例えば、図1のように撮像部101が固定されているのではなく、ヘルメット型集荷補助装置100の頭部装着部分の外周を周回するようになっており、集荷補助装置100を頭部に装着している集荷作業者が視界で捉えることができない周辺(例えば集荷作業者の横方向や背後方向等)の画像を撮像するようになっていてもよい。さらに、撮像部101の撮像方向はこれらに限定されず、全方向を撮像できるようになっていてもよい。つまり、全方向において存在する物品を特定対象とし、全方向における物品を撮像してそれらの物品の位置を決定するようになっていてもよい。
【0041】
そして、撮像画像と、その撮像画像を撮像した際の撮像部101の回転角度(撮像方向)とを関連づけて記録しておき、QRコード(物品特定情報)の撮像画像中における位置と、その撮像画像を撮像時における撮像部101の撮像方向とから、そのQRコードが付されている物品の物品倉庫内における位置を算出する。物品情報保持部104は、この算出された物品の物品倉庫内における位置を、物品情報(図5)における各QRコードの位置情報として保存しておく。位置情報取得部106は、この物品情報から集荷対象物品の位置を取得し、位置提示部107は、取得した集荷対象物品の位置をレーザ照射等により集荷作業者に提示する。
これにより、集荷作業者は自分の視界では捉えられない場所に集荷対象物品がある場合でも、集荷対象物品の位置をレーザ照射等によって容易に知ることができるため、集荷作業の効率が大幅に向上する。
【0042】
(2)また、上記説明においては、集荷補助装置100の各構成はヘルメット型の筐体に一体に備えられていたが、各構成は別々の装置から構成されていてもよい。例えば、集荷作業者は、集荷作業を行う際にスマートフォン等の携帯型端末を携行し、あらかじめ集荷情報を携帯型端末に記録しておく(すなわち、集荷情報保持部105は携帯型端末に備えられている)。
【0043】
そして、作業場にてスマートフォンもしくは集荷補助装置100の電源をONすると、自動的に(もしくは手動で)スマートフォンに備えられているBluetooth等の無線送信部から集荷補助装置100に対して集荷情報が送信されるようになっていてもよい。これにより集荷作業のたびに集荷すべき物品が異なる場合でも、集荷補助装置100に備えられているメモリ等に集荷情報をその都度記録する必要がなくなり、作業前の準備が簡単になる。また、集荷補助装置100の構成も簡潔となるため、コストが低くなる等の効果も期待できる。
【0044】
(3)また、上記説明においては、集荷補助装置100は集荷作業者の頭部に装着するヘルメット型であるので、集荷作業者が移動することにより撮像部101は様々な方向の角度から収容されている物品を撮像することが可能である。例えば、集荷作業者が陳列棚どうしの間を歩きながら撮像部101が周辺を撮像することにより、ある方向からは撮像できなかった陳列棚に隠れていた物品等も撮像することが可能である。
ただし、集荷補助装置100の形態はヘルメット型に限定されるものではない。例えば、眼鏡型、ハチマキ型、腕時計型等、いろいろな形状とすることができる。さらに、本実施形態に係る集荷補助装置100は、集荷対象物品を運ぶための集荷用カート等に装着可能な形態等とすることもできる。
【0045】
(第2実施形態)
(集荷システムの概要)
まず、図10を参照して、本実施形態に係る集荷システムの概要について説明する。
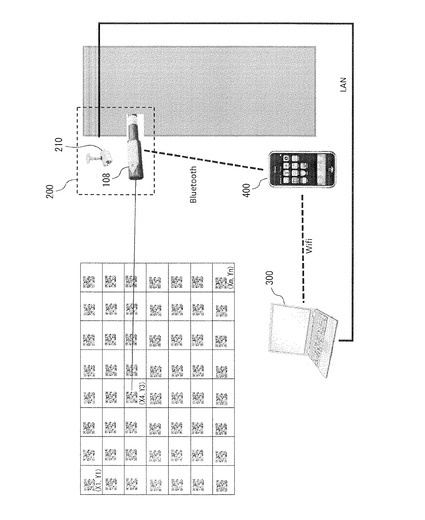
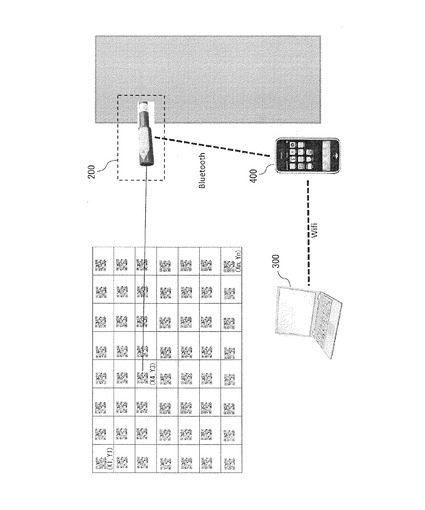
本実施形態の集荷システムは、集荷指示装置200と、情報端末300と、携帯型端末400と、を含んで構成される。集荷指示装置200は、物品倉庫内に設置されており、物品倉庫内において周辺を撮像するカメラ210と、レーザを集荷対象物品に照射するレーザ出力部108とを備えている。
【0046】
また、情報端末300は、カメラ210で撮像された撮像画像をLAN(Local Area Network)等のネットワークを介して受信して画像解析し、物品情報(図5)の作成を行う。また、集荷指示者は情報端末300を操作して、集荷対象となる物品の集荷情報を作成する。そして、情報端末300は物品情報と、集荷情報とから、集荷対象物品の位置情報を取得し、携帯型端末400に送信する。
【0047】
携帯型端末400は、集荷作業の際に集荷作業者が携行するスマートフォン等の携帯型端末であり、集荷作業に先立って、情報端末300からWifi(wireless fidelity)等の無線通信によって集荷対象物品の位置情報を受信して内部のメモリ等に記憶させておく。また、集荷作業者が携帯型端末400を持って物品倉庫に行き、携帯型端末400と集荷指示装置200とが所定の距離内に近づくと、Bluetooth等の近距離無線通信にて、内部のメモリ等に記憶している集荷対象物品の位置情報が集荷指示装置200に自動的に送信される。
そして、集荷指示装置200は、携帯型端末400から近距離無線通信で集荷対象物品の位置情報を受信すると、受信した位置情報をもとにしてレーザ出力部108からレーザを集荷対象物品に照射して集荷作業者に集荷対象物品の位置を提示する。
【0048】
(集荷システムの構成)
以下、図11を参照して、本実施形態に係る集荷システムの構成例について説明する。なお、図11において、第1実施形態の構成と同様の構成は同一符号によって示す。また、本実施形態に係る集荷システムにおける物品情報、集荷情報、位置情報等の構成については、第1実施形態と同様である。
【0049】
(集荷指示装置200の構成)
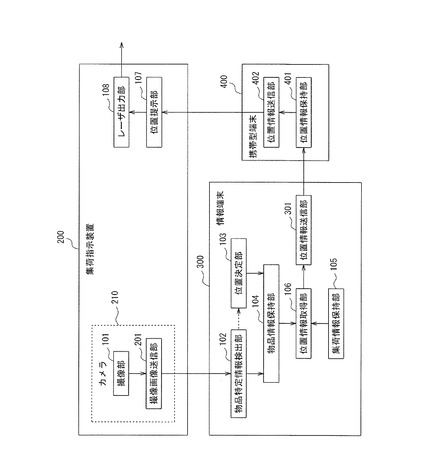
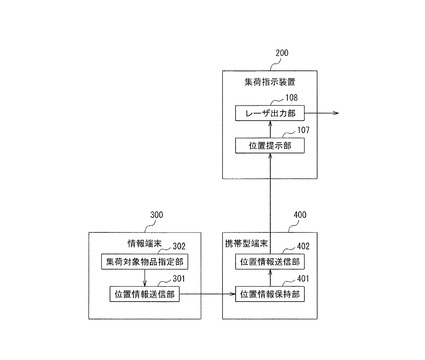
集荷指示装置200は、撮像部101と撮像画像送信部201とを備えるカメラ210と、位置提示部107と、レーザ出力部108とを有する。ここで、撮像画像送信部201以外の構成については、第1実施形態と同様である。
撮像画像送信部201は、撮像部101により撮像された撮像画像を情報端末300に送信する。本実施形態においては、LANによって撮像画像を情報端末300に送信するが、これに限定されるものではない。また、情報端末300の物品特定情報検出部102は、集荷指示装置200から送信される撮像画像を受信し、受信した撮像画像中において物品を特定するための情報である物品特定情報を検出する。
【0050】
(情報端末300の構成)
情報端末300は、物品特定情報検出部102と、位置決定部103と、物品情報保持部104と、集荷情報保持部105と、位置情報取得部106と、位置情報送信部301とを有する。ここで、位置情報送信部301以外の構成については、第1実施形態と同様である。
位置情報送信部301は、位置情報取得部106で取得された位置情報を携帯型端末400に送信する。本実施形態においては、Wifiによって位置情報を携帯型端末400に送信するが、これに限定されるものではない。赤外線通信、Bluetooth、無線LAN等の無線通信方式を用いてもよい。
【0051】
集荷指示者は情報端末300を操作して、集荷対象となる物品の集荷情報を入力すること等により、集荷情報保持部105は、入力された集荷情報を保持する。この時、物品情報保持部104で保持された物品情報の一覧(すなわち物品倉庫に陳列されている物品の物品特定情報の一覧)を表示するGUI(Graphical User Interface)が情報端末300の画面に表示されるようになっていてもよい。そして、集荷指示者はそのGUIに表示される物品情報の一覧から集荷すべき物品をタッチパネル、キーボード、マウス等の入力装置を用いて選択し、選択された物品の物品特定情報が集荷情報として保存されるようになっていてもよい。これにより、集荷指示者は簡単に集荷対象物品の指定を行うことができる。
【0052】
(携帯型端末400の構成)
携帯型端末400は、位置情報保持部401と、位置情報送信部402とを有する。
位置情報保持部401は、情報端末300から送信される位置情報を受信して内部メモリ等の記憶装置に保持する。
位置情報送信部402は、位置情報保持部401に保持されている位置情報を近距離無線通信にて集荷指示装置200に送信する。本実施形態においては、Bluetoothによって位置情報を集荷指示装置200に送信するが、これに限定されるものではない。赤外線通信、Wifi、無線LAN等の無線通信方式を用いてもよい。また、位置情報送信部402は、例えば携帯型端末400と集荷指示装置200との距離が所定の距離内となると、自動的に位置情報の送信を開始するようになっていてもよい。
また、集荷指示装置200の位置提示部107は、携帯型端末400の位置情報送信部402から送信される位置情報を受信し、受信した位置情報から、集荷対象物品の位置を携帯型端末400の集荷作業者に提示する。
【0053】
(集荷システムにおける処理)
以下、図12、図13、および図14に示すフロー図を参照して、本実施形態に係る集荷システムにおける処理例について説明する。
(カメラ210の処理フロー)
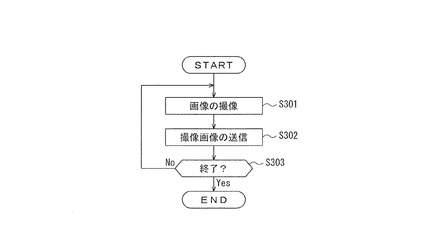
図12は、集荷指示装置200のカメラ210の処理フロー図である。
撮像部101は、集荷指示装置200の周辺の画像を撮像する(ステップS301)。そして、撮像した画像を情報端末300にLAN等のネットワークを介して送信する(ステップS302)。
カメラ210の電源がOFFされる等の理由により終了するまで、以上の処理を繰り返す(ステップS303)。
【0054】
なお、図12に示されるカメラ210での処理は、あらかじめ設定された時間間隔ごとに繰り返し実行される。具体的には、5〜10分程度が好適であるが、これに限定されるものではない。例えば、リアルタイム(極微小な時間単位で撮影する)処理であってもよい。カメラ210は物品倉庫において物品が保管されている状態を把握することを目的として周辺画像を撮像する。よって、例えば、物品倉庫内において保管される物品が頻繁に搬入・搬出される(物品の陳列状態が頻繁に変化する)時間帯には、短い時間間隔で撮像処理を行い、搬入・搬出が少ない時間帯には長い時間間隔で撮像処理を行うようになっていてもよい。さらに、物品の搬入・搬出が行われない時間帯には撮像処理を行わないようになっていてもよい。
【0055】
さらに、ある特定のイベントが発生した場合にのみ撮像処理を行うようになっていてもよい。例えば、物品倉庫管理者の任意のタイミングにて撮像処理が行われる等となっていてもよい。
また、撮像画像の送信処理(ステップS302)は、特定のタイミングで実行するようになっていてもよい。例えば、撮像部101でリアルタイム(極微小な時間単位で撮影する)処理もしくは数十ミリ秒程度の間隔で物品倉庫内の周辺を撮像しておき、動体検知処理により物品の搬入・搬出が行われることによる画像変化を検出した場合等に、撮像画像の送信処理(ステップS302)を行うようになっていてもよい。これにより、処理負荷を抑制しつつ、必要な物品の陳列状況を的確に把握することができる。
【0056】
(情報端末300の処理フロー)
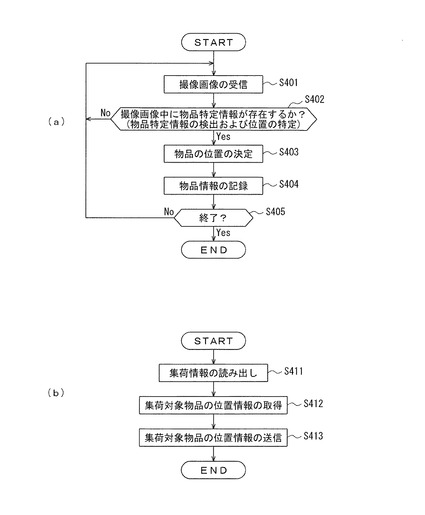
図13は、情報端末300において実行される処理を示す処理フロー図である。
まず、図13(a)のフロー図について説明する。図13(a)の処理は、カメラ210から撮像画像が送信される度に実行される処理である。
物品特定情報検出部102は、カメラ210の撮像画像送信部201から送信される撮像画像を受信して、この撮像画像中に物品特定情報(QRコード等)が含まれているか判断する(ステップS401)。含まれていない場合には、ステップS401の処理が繰り返される。また、撮像画像中に物品特定情報が含まれている場合には、本ステップにおいて、物品特定情報の撮像画像中における位置も検出される。
【0057】
撮像画像中に物品特定情報が含まれている場合には、位置決定部103は、物品特定情報の撮像画像中における位置から物品の位置を決定する(ステップS403)。なお、ここで決定される物品の位置とは、ステップS403で検出された物品に付されている物品特定情報(QRコード等)の撮像画像中における位置そのものであってもよいし、物品特定情報の撮像画像中における位置から物品倉庫内における物品の実際の位置を換算したものであってもよい。物品情報保持部104は、ステップS402で特定された物品特定情報と、ステップS403で決定された物品の位置とを関連づけた物品情報を、メモリ等の記憶装置に記憶して保持する(ステップS404)。
情報端末300の電源がOFFされる等の理由により終了するまで、以上の処理を繰り返す(ステップS408)。これにより、常に最新の物品情報が情報端末300に保存される。
【0058】
次に、図13(b)のフロー図について説明する。図13(b)の処理は、集荷作業を行う際に実行される処理である。
位置情報取得部106は、集荷情報保持部105が保持している集荷情報を読み出す(ステップS411)。この集荷情報は、例えば、集荷指示者や集荷作業者等が情報端末300に入力し、入力された集荷情報が情報端末300内部のメモリ等に保存されたものである。そして、図13(a)のステップS404にてメモリ等の記憶装置に記憶された物品情報を参照して、ステップS411で読み出した集荷情報に含まれている集荷対象物品の物品特定情報に対応する位置情報を取得する(ステップS412)。
位置情報送信部301は、ステップS412で取得した集荷対象物品の位置情報を携帯型端末400に送信する(ステップS413)。
【0059】
なお、図13(b)の処理が実行されるタイミングは、具体的には、例えば集荷作業者が集荷作業を開始する直前である。すなわち、集荷するべき物品が決定されて情報端末300に入力された後、ステップS411〜S413の処理が実行され、その後、集荷作業者は集荷対象物品の位置情報が送信されて保存された携帯型端末400を携行して、物品倉庫で集荷作業を行う。
【0060】
(携帯型端末400の処理フロー)
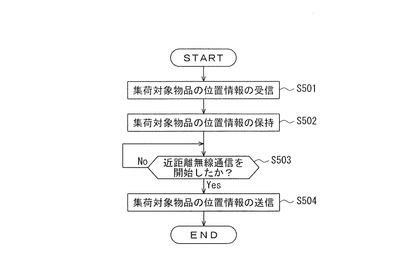
図14は、携帯型端末400の処理フロー図である。
位置情報保持部401は、情報端末300から送信される集荷対象物品の位置情報を受信する(ステップS501)。受信した位置情報を携帯型端末400の内部のメモリ等に保持する(ステップS502)。
携帯型端末400と集荷指示装置200との距離が所定距離内になった、又は集荷実行の指示等により、集荷指示装置200との近距離無線通信を開始した場合には(ステップS503)、ステップS504にて保持した集荷対象物品の位置情報を集荷指示装置200に送信する(ステップS504)。
【0061】
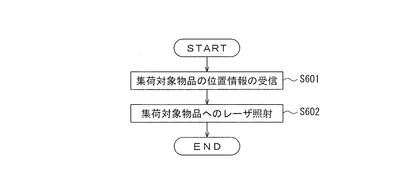
(集荷指示装置200の処理フロー)
図15は、携帯型端末400から集荷対象物品の位置情報を送信された集荷指示装置200が実行する処理を示すフロー図である。
位置提示部107は、携帯型端末400から集荷対象物品の位置情報を受信する(ステップS601)。さらに、レーザ出力部108は、受信した位置情報をもとに集荷対象物品(もしくは集荷対象物品の物品特定情報)にレーザを照射する(ステップS602)。
なお、上記の説明においては、図13(a)に示される物品情報を生成して保持する処理を情報端末300で実行することとしているが、カメラ210で実行するようになっていてもよい。そして、カメラ210で生成された物品情報が情報端末300に送信されるようになっていてもよい。
【0062】
(第3実施形態)
(集荷システムの概要)
まず、図16を参照して、本実施形態に係る集荷システムの概要について説明する。
本実施形態の集荷システムは、第2実施形態と同様に、集荷指示装置200と、情報端末300と、携帯型端末400と、を含んで構成される。第2実施形態との違いは、物品倉庫内での周辺の撮像処理を行わない点である。例えば、集荷指示者が集荷すべき集荷対象物品がいずれの場所に陳列されているかをあらかじめ知っている場合等を想定している。
【0063】
(集荷システムの構成)
図17は、本実施形態に係る集荷システムの構成例を示す図である。なお、図17において、第2実施形態の構成と同様の構成は同一符号によって示す。また、本実施形態に係る集荷システムにおける位置情報等の構成については、第1実施形態と同様である。
本実施形態に係る集荷システムでは、あらかじめ集荷対象物品の位置情報が情報端末300のメモリ等に保存されており、位置情報送信部301から携帯型端末400の位置情報保持部401に送信される。また、集荷対象物品は、例えば、集荷指示者が専用のGUI等を介してマウス等の入力装置を用いて集荷対象物品の指定の入力を行い、集荷対象物品指定部302において、このユーザの入力を受け付けることによって決定される。
【0064】
すなわち、このような処理によって、集荷対象物品指定部302は、物品倉庫等の物品収集場に収集されている物品の中から物品収集場内における位置を集荷作業者に提示すべき集荷対象物品の指定を行う。そして、この集荷対象物品指定部302により指定された集荷対象物品の位置情報が情報端末300のメモリ等から読み出される。読み出された位置情報は、携帯型端末400の位置情報送信部402から集荷指示装置200に送信される。
集荷指示装置200の位置提示部107は、携帯型端末400から送信される位置情報に示される集荷対象物品の位置に、レーザ出力部108からレーザが照射されることにより集荷対象物品の位置を集荷作業者に提示する。
【0065】
なお、上記各実施形態に説明した集荷システムにおける各装置は、図示しないCPU(Central Processing Unit)、RAMやROM等の記憶装置、ネットワークインターフェイス等の一般的なコンピュータの構成と同様の構成により実現される。また、上記に説明した各構成の機能は、例えば、CPUが記憶装置に記憶されているプログラムを読み出して実行することによって実現される機能である。また、物品情報保持部104、集荷情報保持部105、位置情報保持部401は、メモリ等の記憶装置に設けられたデータ記憶領域であり、記憶する情報をデータベース等の形式で記憶して保持する。
【0066】
(まとめ)
上記に説明したように、本発明の一実施形態によれば、集荷作業者は物品倉庫等の物品収集場において目的の物品を容易に集荷することが可能となり、集荷作業の労力を省き、作業時間を大幅に短縮することができる。また、集荷作業に不慣れな作業者であっても、容易に集荷作業を行うことができる。
なお、本発明の範囲は、図示され記載された例示的な実施形態に限定されるものではなく、本発明が目的とするものと均等な効果をもたらすすべての実施形態をも含む。さらに、本発明の範囲は、すべての開示されたそれぞれの特徴のうち特定の特徴のあらゆる所望する組み合わせによって画されうる。
【符号の説明】
【0067】
10 作業者
11 物品
12 レーザ光線
20 撮像画像
21、22、23 QRコード
24 撮像画像中の中央エリア
100 集荷補助装置
101 撮像部
102 物品特定情報検出部
103 位置決定部
104 物品情報保持部
105 集荷情報保持部
106 位置情報取得部
107 位置提示部
108 レーザ出力部
200 集荷指示装置
201 撮像画像送信部
210 カメラ
300 情報端末
301 位置情報送信部
302 集荷対象物品指定部
400 携帯型端末
401 位置情報保持部
402 位置情報送信部
【技術分野】
【0001】
本発明は、物品倉庫等の物品収集場における集荷作業において集荷対象物品を検知するための技術に関する。
【背景技術】
【0002】
従来、物品倉庫等のように複数の物品が保管されている場所において、集荷したい物品を探し出す場合、作業者が各物品に付されている商品名や商品コード等を目視して探し出していた。また、この際、作業者が集荷対象の物品の商品名や商品コード等が書かれているメモを手に持ち、そのメモを見ながら集荷作業をしていたが、メモを読み間違えたり、手に持っているメモが集荷作業に邪魔となる等の問題があった。
【0003】
また、物品に付されているバーコードをバーコードリーダーで読みながら集荷対象の物品であるか確認する方法等もあるが、物品ごとにバーコードをリーダーに読み込ませる作業は煩雑であり、多大な時間を要していた。
このような問題に対し、集荷対象の物品の商品コード等を音声で作業者に伝達する音声ピッキングシステムが存在する(例えば、特許文献1)。これらの音声ピッキングシステムによれば、作業者は頭部に装着したヘッドセットのスピーカーから商品コード等を聞きながら集荷作業を行うことができる。これにより、ハンズフリーとなるため集荷作業が容易になり、物品の商品コード等を読み間違えるミス等も低減させることができる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許4261583号
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1のような音声ピッキングシステムでは、メモを読んだりバーコードリーダーを操作する必要がないため、作業を簡略化することができる。しかしながら、作業者は音声で指示のあった物品を目視で探し出さなくてはならず、物品倉庫に保管されている複数の物品の中から集荷したい物品を探し出すのは、大変な労力と多大な時間を要していた。
本発明は、上記課題に鑑みてなされたものであり、物品倉庫等において目的の物品を容易に集荷することが可能なレーザーピッキング装置、レーザーピッキングシステム、および物品検出方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本発明の一態様は、撮像部と、前記撮像部により撮像された撮像画像中において物品収集場に収集されている物品を特定するための情報である物品特定情報を検出する物品特定情報検出部と、前記物品特定情報が検出された場合には、前記物品特定情報の前記撮像画像中における位置から、前記物品収集場内における前記物品の位置を決定する位置決定部と、検出された前記物品特定情報と、決定された前記物品の位置を示す位置情報とを関連付けた物品情報を保持する物品情報保持部と、集荷対象物品の前記物品特定情報を保持する集荷情報保持部と、前記物品情報保持部に保持されている前記物品情報から、前記集荷対象物品の前記物品特定情報に対応する前記集荷対象物品の前記位置情報を取得する位置情報取得部と、取得された前記位置情報から、前記集荷対象物品の位置を集荷作業者に視認可能に提示することで、前記集荷作業者に前記集荷対象物品が集荷対象であることを認識せしめる位置提示部と、を有する集荷システムである。
【0007】
また、本発明の他の態様は、情報端末と、前記情報端末と通信を行う携帯型端末と、前記携帯型端末と近距離無線通信を行う集荷指示装置と、を有する集荷システムであって、前記情報端末は、前記集荷指示装置から送信される前記撮像画像中において物品収集場に収集されている物品を特定するための情報である物品特定情報を検出する物品特定情報検出部と、前記物品特定情報が検出された場合には、前記物品特定情報の前記撮像画像中における位置から、前記物品収集場内における前記物品の位置を決定する位置決定部と、検出された前記物品特定情報と、決定された前記物品の位置を示す位置情報とを関連付けた物品情報を保持する物品情報保持部と、集荷対象物品の前記物品特定情報を保持する集荷情報保持部と、前記物品情報保持部に保持されている前記物品情報から、前記集荷対象物品の前記物品特定情報に対応する前記集荷対象物品の前記位置情報を取得する位置情報取得部と、取得された前記位置情報を前記携帯型端末に送信する第1の位置情報送信部と、を有し、前記携帯型端末は、集荷作業者が携行する端末であって、前記情報端末から送信される前記位置情報を受信して保持する位置情報保持部と、前記位置情報保持部に保持されている前記位置情報を前記近距離無線通信にて前記集荷指示装置に送信する第2の位置情報送信部と、を有し、前記集荷指示装置は、撮像部と、前記撮像部により撮像された撮像画像を前記情報端末に送信する撮像画像送信部と、前記携帯型端末から送信される前記位置情報から、前記集荷対象物品の位置を、前記集荷作業者に視認可能に提示することで、前記集荷作業者に前記集荷対象物品が集荷対象であることを認識せしめる位置提示部と、を有することを特徴とする集荷システムである。
【0008】
また、本発明の他の態様は、撮像部と、物品特定情報検出部と、位置決定部と、物品情報保持部と、集荷情報保持部と、位置情報取得部と、位置情報取得部と、位置提示部と、を有する集荷システムが実行する集荷方法であって、前記撮像部が、撮像を行う第1のステップと、前記物品特定情報検出部が、前記撮像部により撮像された撮像画像中において物品収集場内に収集されている物品を特定するための情報である物品特定情報を検出する第2のステップと、前記位置決定部が、前記物品特定情報が検出された場合には、前記物品特定情報の前記撮像画像中における位置から、前記物品収集場内における前記物品の位置を決定する第3のステップと、前記物品情報保持部が、検出された前記物品特定情報と、決定された前記物品の位置を示す位置情報とを関連付けた物品情報を記憶して保持する第4のステップと、前記位置情報取得部が、前記集荷情報保持部から集荷対象物品の前記物品特定情報を読み出す第5のステップと、前記位置情報取得部が、前記物品情報保持部に保持されている前記物品情報から、読み出された前記集荷対象物品の前記物品特定情報に対応する前記集荷対象物品の前記位置情報を取得する第6のステップと、前記位置提示部が、取得された前記位置情報から、前記集荷対象物品の位置を集荷作業者に認識可能に提示することで、前記集荷作業者に前記集荷対象物品が集荷対象であることを認識せしめる第7のステップと、を含むことを特徴とする集荷方法である。
【0009】
また、本発明の他の態様は、物品収集場に収集されている物品の中から、前記物品収集場内における位置を集荷作業者に提示すべき集荷対象物品を指定する集荷対象物品指定部と、指定された前記集荷対象物品の位置を示す位置情報を出力する位置情報出力部と、出力された前記位置情報から、前記集荷対象物品の位置を、前記集荷作業者に視認可能に提示することで、前記集荷作業者に前記集荷対象物品が集荷対象であることを認識せしめる位置提示部と、を有する集荷システムである。
【発明の効果】
【0010】
本発明によれば、集荷作業者は物品倉庫等の物品収集場において目的の物品を容易に集荷することが可能となり、集荷作業の労力を省き、作業時間を大幅に短縮することができる。
【図面の簡単な説明】
【0011】
【図1】本発明の第1の実施形態に係る集荷システムの概要を示す図である。
【図2】本発明の第1の実施形態に係る集荷補助装置の構成の一例を示す機能ブロック図である。
【図3】物品特定情報を検出して物品特定情報の位置を決定する方法の具体例を示す図である。
【図4】物品特定情報を検出して物品特定情報の位置を決定する方法の具体例を示す図である。
【図5】本発明の第1の実施形態に係る物品情報保持部に保持される物品情報の具体例を示す図である。
【図6】本発明の第1の実施形態に係る集荷情報保持部に保持される集荷対象物品の物品特定情報の具体例を示す図である。
【図7】本発明の第1の実施形態に係る位置提示部によって集荷対象物品の位置を提示する方法の具体例を示す図である。
【図8】本発明の第1の実施形態に係る集荷補助装置における処理の一例を示すフロー図である。
【図9】本発明の第1の実施形態に係る集荷補助装置における処理の一例を示すフロー図である。
【図10】本発明の第2の実施形態に係る集荷システムの概要を示す図である。
【図11】本発明の第2の実施形態に係る集荷システムの構成の一例を示す機能ブロック図である。
【図12】本発明の第2の実施形態に係る集荷指示装置のカメラにおける処理の一例を示すフロー図である。
【図13】本発明の第2の実施形態に係る情報端末における処理の一例を示すフロー図である。
【図14】本発明の第2の実施形態に係る携帯型端末における処理の一例を示すフロー図である。
【図15】本発明の第2の実施形態に係る集荷指示装置における処理の一例を示すフロー図である。
【図16】本発明の第3の実施形態に係る集荷システムの概要を示す図である。
【図17】本発明の第3の実施形態に係る集荷システムの構成の一例を示す機能ブロック図である。
【発明を実施するための形態】
【0012】
以下、本発明の実施形態について、図面を参照しながら説明する。なお、以下に説明する各実施形態においては、一例として、物品倉庫に収容されている多数の物品から集荷したい物品を集荷する場合を想定して説明するが、本発明はこのような場面に限定されるものではない。物品が多数収集されている物品収集場において特定の物品を探し出したい場面であれば、様々な物品収集場において適用可能である。例えば、多数の商品が陳列されている商品売場で特定の商品を探し出したい場合や、港などで沢山の車両が配列されており、その中から運搬すべき車両を探して収容対象とする場合等、様々な場面に適用できる。
なお、以下の説明において参照する各図では、他の図と同等部分は同一符号によって示す。
【0013】
(第1実施形態)
(集荷システムの概要)
まず、図1を参照して、本実施形態に係る集荷システムの概要について説明する。
図1(a)は、本実施形態に係る集荷システムに用いられる集荷補助装置の外観を示す図である。集荷補助装置100は、集荷作業を行う作業者の頭部に装着可能なヘルメット型になっている。また、集荷補助装置100は、周辺を撮像するカメラ(撮像部)101と、任意の場所に可視光レーザを照射することが可能なレーザ出力部108とを備えている。図1(b)に示されるように、集荷作業を行う作業者10は、物品が収容されている物品倉庫において集荷作業を行う際には、ヘルメット型の集荷補助装置100を頭部に装着して作業を行う。また、撮像部101は、ヘルメット型の集荷補助装置100の前方に備えられており、作業者の目線と同一方向の周辺の画像をリアルタイムに逐次撮像する。
【0014】
また、集荷補助装置100は内部に画像処理機能を備えており、撮像部101で撮像された画像において、集荷すべき物品を特定するためのQRコード、バーコード、文字コード等が存在するか探索する。集荷する物品11のQRコード等を検出した場合には、検出したQRコード等の撮像画像中における位置から集荷対象の物品11の位置を判断し、図1(b)に示されるように、集荷対象の物品11の位置に向けてレーザ出力部108からレーザ12を照射する。
これにより、作業者は集荷すべき物品の位置を簡単に知ることができ、従来、目視でQRコード等を確認しながら物品を探していた場合と比較して、各段に集荷作業の効率が向上する。
【0015】
(集荷補助装置の構成)
以下、図2を参照しながら、本実施形態に係る集荷補助装置100の構成例について説明する。
図2に示されるように、集荷補助装置100は、撮像部101と、物品特定情報検出部102と、位置決定部103と、物品情報保持部104と、集荷情報保持部105と、位置情報取得部106と、位置提示部107と、レーザ出力部108と、を有する。
撮像部101は、物品が収集されている物品収集場内を撮像する。本実施形態においては、撮像部101は物品倉庫内を撮像する。撮像部101で撮像された画像の画像データは、集荷補助装置100の内部に備えられているRAM(Random Access Memory)等のメモリに保存される。
【0016】
物品特定情報検出部102は、撮像部101により撮像された撮像画像中において物品収集場に収集されている物品を特定するための情報である物品特定情報を検出する。物品特定情報は、物品を一意に識別できるものであればよい。例えば、QRコード、バーコード、商品コードや商品番号等の文字列等が挙げられる。また、物品の大きさが物品ごとに異なる場合には、物品の大きさを物品特定情報として採用してもよい。また、物品の形状、色、等が物品ごとに異なる場合には、物品の形状、色、等を物品特定情報として採用することができる。さらに、これらの複数種類の情報を物品特定情報としてもよいし、複数種類の情報を組み合わせたものを物品特定情報としてもよい。なお、本実施形態においては、物品特定情報はQRコードであるとして説明する。
【0017】
位置決定部103は、物品特定情報検出部102において物品特定情報が検出された場合には、物品特定情報の撮像画像中における位置から、物品収集場内における物品の位置を決定する。ここで、「物品の位置」とは、物品そのものの位置のみだけでなく、物品に付されているQRコード等の物品特定情報の位置を物品の位置としてもよい。なぜならば、集荷作業者が集荷したい物品が物品収集場内のいずれの位置にあるかを知ることができればよく、物品特定情報が物品収集場内のいずれの位置にあるのかが分かれば、それは、すなわち物品の位置が分かることと等価だからである。
【0018】
また、物品の位置を決定する際には、物品特定情報の撮像画像中における位置そのものを「物品の位置」とみなしてもよいし、物品特定情報の撮像画像中における位置から、作業場における物品(もしくは物品特定情報)の実際の位置を換算し、この換算結果を「物品の位置」とみなしてもよい。さらに、「位置」とは、相対的位置(例えば、特定情報の撮像画像における撮像方向に対する相対位置)でもよいし、絶対的位置(例えば、特定情報の撮像画像における絶対位置)でもよい。本実施形態においては、物品特定情報の撮像画像中における絶対位置そのものを「物品の位置」として採用する。
【0019】
図3は、物品特定情報を検出して物品特定情報の位置を決定する方法の具体例を示す図である。物品特定情報検出部102は、例えば、撮像部101で撮像される撮像画像20に対して横をX軸、縦をY軸とするXY座標軸を有している。図3では、撮像画像20の全体を、横60×縦60のエリアに分割し、各エリアを、(X1,Y1), (X1,Y2), ・・・ , (X60,Y60) としている。
【0020】
そして、例えば、図4に示されるように撮像画像20にてQRコード(物品特定情報)21、22が認識されたとすると、QRコード21、22の中心がいずれのエリアにあるかを判断し、これをQRコードの位置として認識する。図4の例では、QRコード21の位置は(X2,Y4)、QRコード22の位置は(X4,Y7)である。
また、物品特定情報が文字列である場合には、例えば、文字列全体を内側に含むように囲んだ四角形の中心の位置を、物品特定情報の位置としてもよい。物品特定情報が物品の大きさや物品の形状である場合には、例えば、物品全体を内側に含むように囲んだ円の中心の位置を物品特定情報の位置としてもよい。
【0021】
なお、図3および図4においては物品特定情報の位置を2次元(XY座標上)で捉えているが、3次元で捉えるようになっていてもよい。例えば、全ての物品に付されるQRコード等の物品特定情報の実物大の寸法があらかじめ定められた大きさに統一されている場合には、この実物の寸法と、撮像画像中でのQRコード等の大きさとによって、そのQRコード等が撮像部101からどれくらいの距離に存在するものであるかを算出可能である。これにより、物品特定情報の撮像画像中(2次元平面上)における位置のみならず、さらに奥行き方向における位置も把握することができる。
【0022】
物品情報保持部104は、物品特定情報検出部102において検出された物品特定情報と、位置決定部103において決定された物品の位置を示す位置情報とを関連付けた物品情報を保持する。
図5は、物品情報保持部104にて保持される物品情報の具体例を示す図である。図5に示されるように、物品情報保持部104は、撮像画像中において検出されたQRコード(物品特定情報)と、撮像画像中におけるQRコードの位置(物品の位置)とを関連づけて、データベース等の形式でRAM等のメモリに記憶して保持する。
【0023】
集荷情報保持部105は、集荷対象の物品である集荷対象物品の物品特定情報を保持する。図6は、集荷情報保持部105に保持される集荷対象物品の物品特定情報の具体例を示す図である。図6では、集荷対象物品のQRコード(物品特定情報)として、「コードA」、「コードC」、「コードX」が指定されており、これは、「コードA」、「コードC」、「コードX」のQRコードが付されている物品が集荷すべき物品であることを意味する。
【0024】
集荷対象物品の物品特定情報は、例えば、集荷作業を行う前にあらかじめヘルメット型の集荷補助装置100の内部のROM(Read Only Memory)やRAM等のメモリに記憶される。
位置情報取得部106は、物品情報保持部104に保持されている物品情報から、集荷対象物品の物品特定情報に対応する集荷対象物品の位置情報を取得する。例えば、図5および図6の例であれば、位置情報取得部106は、図6で指定されているQRコード「コードA」、「コードC」、「コードX」を読み出した後、図5の物品情報を参照し、「コードA」、「コードC」、「コードX」の位置として、(X2,Y4), (X10,Y25), (X48,Y11) を取得する。
【0025】
位置提示部107は、位置情報取得部106において取得された位置情報から、集荷対象物品の位置を集荷作業者(集荷補助装置100のユーザ)に視認可能に提示することで、集荷作業者に、その集荷対象物品が集荷対象であることを認識せしめる。本実施形態においては、位置提示部107は、レーザ出力部108にて出力される可視光レーザを用いて集荷対象物品の位置を集荷補助装置100の集荷作業者に提示するが、集荷対象物品の位置の提示方法はこれに限定されるものではない。他の方法により集荷対象物品の位置を提示するようになっていてもよい。
【0026】
可視光レーザを用いて集荷対象物品の位置を提示する方法としては、例えば、図1(b)に示されるようにレーザを集荷対象物品に照射することで集荷対象物品の位置を提示する方法が挙げられる。上述した図5および図6の例であれば、位置情報取得部106が取得したQRコード「コードA」、「コードC」、「コードX」の位置である座標(X2,Y4), (X10,Y25), (X48,Y11) に対してレーザ出力部108がレーザを照射する。なお、レーザ出力部108は、物品特定情報検出部102が保持しているものと同じXY座標を有し、このXY座標をもとにしてレーザの照射位置を合わせる。
【0027】
また、レーザ出力部108が可視光レーザを照射するのは、集荷対象物品の特定情報であってもよいし、集荷対象物品の特定情報以外の部分であってもよい。例えば、物品の外箱の大きさ、QRコード等(物品特定情報)が付される外箱での位置、および物品の陳列される方向が同じであれば、集荷対象物品の外箱におけるQRコード以外の領域がどの位置にどれくらいの大きさであるかは判断することができる。
【0028】
また、本実施形態においては、撮像部101はヘルメット型集荷補助装置100の正面に固定されており、集荷補助装置100の集荷作業者の目線と同一方向の撮像画像を撮像する。よって、撮像部101が撮像する撮像画像は集荷作業者の視界とほぼ同等となる。そこで、図7に示されるように撮像画像中の集荷対象物品のQRコード23の位置が撮像画像の中央エリア24から外れている場合には、作業場の壁等にレーザ12で矢印等の図形、文字(方向を表す文字列等)、画像を線により模写した線画等を描画してQRコード23の方向を示すことによって集荷作業者に集荷対象物品の位置を提示するようになっていてもよい。これにより、集荷作業者は自分が向いている方向よりも矢印等で示される方向に集荷対象物品が存在することを知ることができる。
【0029】
なお、中央エリア24の設定は可変に設定できるようになっていてもよい。また、同様に撮像画像の中央の領域でなくとも、集荷対象物品のQRコード23の位置があらかじめ定められた所定の領域から外れていることをもって、作業場の壁等にレーザ12で矢印や文字を描画してQRコード23の方向を示すようになっていてもよい。
また、レーザ出力部108においてレーザの出力方向を制御する方法の一例としては、例えば、MEMS(Micro Electro Mechanical Systems)デバイスによりレーザの出力方向を変化させることができる。また、高性能MEMSを用いれば、所定の方向のみならず、全方位にレーザを出力することができる。
【0030】
(集荷補助装置における処理)
以下、図8および図9に示すフロー図を参照して、本実施形態に係る集荷補助装置100における処理例について説明する。
(処理フロー1)
まず、図8の処理フローについて説明する。図8は、レーザを集荷対象物品に照射することで物品の位置を集荷作業者に提示する場合(図1(b))のフロー図である。なお、図8に示される集荷補助装置100での処理は、あらかじめ設定された時間間隔ごと(例えば数十ミリ秒間隔、リアルタイム等)に繰り返し実行される。
【0031】
撮像部101は、集荷補助装置100の周辺の画像を撮像する(ステップS101)。そして、物品特定情報検出部102は、ステップS101で撮像された撮像画像中に物品特定情報(QRコード等)が含まれているか判断する(ステップS102)。含まれていない場合には、ステップS101の処理が繰り返される。なお、撮像画像中に物品特定情報が含まれていない場合には、レーザ出力部108が“検出なし”等の文字を作業場の内壁等に描画することで、集荷作業者にその旨を通知するようになっていてもよい。これにより集荷作業者は集荷補助装置100の撮像部101を他の場所に向ける必要があることを知ることができる。なお、撮像画像中に物品特定情報が含まれている場合には、本ステップにおいて、物品特定情報の撮像画像中における位置も検出される。
【0032】
撮像画像中に物品特定情報が含まれている場合には、位置決定部103は、物品特定情報の撮像画像中における位置から物品の位置を決定する(ステップS103)。なお、ここで決定される物品の位置とは、ステップS103で検出された物品に付されている物品特定情報(QRコード等)の撮像画像中における位置そのものであってもよいし、物品特定情報の撮像画像中における位置から物品倉庫内における物品の実際の位置を換算したものであってもよい。物品情報保持部104は、ステップS102で特定された物品特定情報と、ステップS103で決定された物品の位置とを関連づけた物品情報を、メモリ等の記憶装置に記憶して保持する(ステップS104)。
【0033】
位置情報取得部106は、集荷情報保持部105が保持している集荷情報を読み出す(ステップS105)。そして、ステップS104にてメモリ等の記憶装置に記憶された物品情報を参照して、ステップS105で読み出した集荷情報に含まれている集荷対象物品の物品特定情報に対応する位置情報を取得する(ステップS106)。
位置提示部107は、ステップS106で取得した集荷対象物品の位置情報に応じて、集荷対象物品へレーザ出力部108からレーザを照射する(ステップS107)。
例えば集荷作業の中断・終了により集荷補助装置100の電源がOFFされる等の理由により終了するまで、以上の処理を繰り返す(ステップS108)。
【0034】
(処理フロー2)
次に、図9の処理フローについて説明する。図9は、レーザで作業場の内壁等に矢印等を描画することによって集荷対象物品の位置を集荷作業者に提示する場合(図7)のフロー図である。なお、図9に示される集荷補助装置100での処理は、あらかじめ設定された時間間隔ごと(例えば数十ミリ秒間隔、リアルタイム等)に繰り返し実行される。
【0035】
撮像部101は、集荷補助装置100の周辺の画像を撮像する(ステップS201)。物品特定情報検出部102は、ステップS201で撮像された撮像画像中に物品特定情報(QRコード等)が含まれているか判断する(ステップS202)。含まれていない場合には、ステップS201の処理が繰り返される。なお、撮像画像中に物品特定情報が含まれていない場合には、レーザ出力部108が“検出なし”等の文字を作業場の内壁等に描画することで、集荷作業者にその旨を通知するようになっていてもよい。
【0036】
また、撮像画像中に物品特定情報が含まれている場合には、本ステップにおいて、物品特定情報の撮像画像中における位置も検出される。また、撮像画像中に物品特定情報が含まれている場合には、位置決定部103は、物品特定情報の撮像画像中における位置を物品の位置として決定する。
物品情報保持部104は、ステップS202で特定された物品特定情報と、その物品特定情報の位置とを関連づけた物品情報を、メモリ等の記憶装置に記憶して保持する(ステップS203)。
【0037】
位置情報取得部106は、集荷情報保持部105が保持している集荷情報を読み出す(ステップS204)。そして、ステップS203にてメモリ等の記憶装置に記憶された物品情報を参照して、ステップS204で読み出した集荷情報に含まれている集荷対象物品の物品特定情報に対応する位置情報を取得する(ステップS205)。
位置提示部107は、ステップS205で取得された集荷対象物品の物品特定情報が撮像画像の中央エリア内(例えば図7の中央エリア24内)にあるか判断する(ステップS206)。集荷対象物品の物品特定情報が撮像画像の中央エリア内にない場合には、位置提示部107は、作業場の内壁に矢印等をレーザで描画することにより集荷対象物品の物品特定情報の方向(集荷作業者が目線を移動すべき方向)を集荷作業者に提示する(ステップS207)。集荷対象物品の物品特定情報が撮像画像の中央エリア内にある場合には、位置提示部107は、集荷対象物品へレーザを照射する(ステップS208)。
【0038】
例えば集荷作業の中断・終了により集荷補助装置100の電源がOFFされる等の理由により終了するまで、以上の処理を繰り返す(ステップS209)。
図9に示される集荷方法は、レーザ出力部108がヘルメット型集荷補助装置100の正面に固定されている場合に有効である。このような構成の場合、レーザ出力部108を動作させる機構が不要となるため、ヘルメット型集荷補助装置100の構成が簡素化され低コストでシステムを構成できるが、そのような構成であっても、集荷作業者の集荷作業の手間を省く効果が十分に期待できる。
【0039】
(他の具体例)
(1)また、上記説明においては、撮像部101はヘルメット型集荷補助装置100の正面に固定されており、集荷補助装置100の集荷作業者の目線と同一方向の撮像画像を撮像することとしたが、これに限定されるものではない。集荷補助装置100の集荷作業者の目線と異なる方向の撮像画像を撮像し、位置決定部103は、撮像部101の撮像方向と、物品特定情報の撮像画像中における位置とから、物品の位置を決定するようになっていてもよい。
【0040】
例えば、図1のように撮像部101が固定されているのではなく、ヘルメット型集荷補助装置100の頭部装着部分の外周を周回するようになっており、集荷補助装置100を頭部に装着している集荷作業者が視界で捉えることができない周辺(例えば集荷作業者の横方向や背後方向等)の画像を撮像するようになっていてもよい。さらに、撮像部101の撮像方向はこれらに限定されず、全方向を撮像できるようになっていてもよい。つまり、全方向において存在する物品を特定対象とし、全方向における物品を撮像してそれらの物品の位置を決定するようになっていてもよい。
【0041】
そして、撮像画像と、その撮像画像を撮像した際の撮像部101の回転角度(撮像方向)とを関連づけて記録しておき、QRコード(物品特定情報)の撮像画像中における位置と、その撮像画像を撮像時における撮像部101の撮像方向とから、そのQRコードが付されている物品の物品倉庫内における位置を算出する。物品情報保持部104は、この算出された物品の物品倉庫内における位置を、物品情報(図5)における各QRコードの位置情報として保存しておく。位置情報取得部106は、この物品情報から集荷対象物品の位置を取得し、位置提示部107は、取得した集荷対象物品の位置をレーザ照射等により集荷作業者に提示する。
これにより、集荷作業者は自分の視界では捉えられない場所に集荷対象物品がある場合でも、集荷対象物品の位置をレーザ照射等によって容易に知ることができるため、集荷作業の効率が大幅に向上する。
【0042】
(2)また、上記説明においては、集荷補助装置100の各構成はヘルメット型の筐体に一体に備えられていたが、各構成は別々の装置から構成されていてもよい。例えば、集荷作業者は、集荷作業を行う際にスマートフォン等の携帯型端末を携行し、あらかじめ集荷情報を携帯型端末に記録しておく(すなわち、集荷情報保持部105は携帯型端末に備えられている)。
【0043】
そして、作業場にてスマートフォンもしくは集荷補助装置100の電源をONすると、自動的に(もしくは手動で)スマートフォンに備えられているBluetooth等の無線送信部から集荷補助装置100に対して集荷情報が送信されるようになっていてもよい。これにより集荷作業のたびに集荷すべき物品が異なる場合でも、集荷補助装置100に備えられているメモリ等に集荷情報をその都度記録する必要がなくなり、作業前の準備が簡単になる。また、集荷補助装置100の構成も簡潔となるため、コストが低くなる等の効果も期待できる。
【0044】
(3)また、上記説明においては、集荷補助装置100は集荷作業者の頭部に装着するヘルメット型であるので、集荷作業者が移動することにより撮像部101は様々な方向の角度から収容されている物品を撮像することが可能である。例えば、集荷作業者が陳列棚どうしの間を歩きながら撮像部101が周辺を撮像することにより、ある方向からは撮像できなかった陳列棚に隠れていた物品等も撮像することが可能である。
ただし、集荷補助装置100の形態はヘルメット型に限定されるものではない。例えば、眼鏡型、ハチマキ型、腕時計型等、いろいろな形状とすることができる。さらに、本実施形態に係る集荷補助装置100は、集荷対象物品を運ぶための集荷用カート等に装着可能な形態等とすることもできる。
【0045】
(第2実施形態)
(集荷システムの概要)
まず、図10を参照して、本実施形態に係る集荷システムの概要について説明する。
本実施形態の集荷システムは、集荷指示装置200と、情報端末300と、携帯型端末400と、を含んで構成される。集荷指示装置200は、物品倉庫内に設置されており、物品倉庫内において周辺を撮像するカメラ210と、レーザを集荷対象物品に照射するレーザ出力部108とを備えている。
【0046】
また、情報端末300は、カメラ210で撮像された撮像画像をLAN(Local Area Network)等のネットワークを介して受信して画像解析し、物品情報(図5)の作成を行う。また、集荷指示者は情報端末300を操作して、集荷対象となる物品の集荷情報を作成する。そして、情報端末300は物品情報と、集荷情報とから、集荷対象物品の位置情報を取得し、携帯型端末400に送信する。
【0047】
携帯型端末400は、集荷作業の際に集荷作業者が携行するスマートフォン等の携帯型端末であり、集荷作業に先立って、情報端末300からWifi(wireless fidelity)等の無線通信によって集荷対象物品の位置情報を受信して内部のメモリ等に記憶させておく。また、集荷作業者が携帯型端末400を持って物品倉庫に行き、携帯型端末400と集荷指示装置200とが所定の距離内に近づくと、Bluetooth等の近距離無線通信にて、内部のメモリ等に記憶している集荷対象物品の位置情報が集荷指示装置200に自動的に送信される。
そして、集荷指示装置200は、携帯型端末400から近距離無線通信で集荷対象物品の位置情報を受信すると、受信した位置情報をもとにしてレーザ出力部108からレーザを集荷対象物品に照射して集荷作業者に集荷対象物品の位置を提示する。
【0048】
(集荷システムの構成)
以下、図11を参照して、本実施形態に係る集荷システムの構成例について説明する。なお、図11において、第1実施形態の構成と同様の構成は同一符号によって示す。また、本実施形態に係る集荷システムにおける物品情報、集荷情報、位置情報等の構成については、第1実施形態と同様である。
【0049】
(集荷指示装置200の構成)
集荷指示装置200は、撮像部101と撮像画像送信部201とを備えるカメラ210と、位置提示部107と、レーザ出力部108とを有する。ここで、撮像画像送信部201以外の構成については、第1実施形態と同様である。
撮像画像送信部201は、撮像部101により撮像された撮像画像を情報端末300に送信する。本実施形態においては、LANによって撮像画像を情報端末300に送信するが、これに限定されるものではない。また、情報端末300の物品特定情報検出部102は、集荷指示装置200から送信される撮像画像を受信し、受信した撮像画像中において物品を特定するための情報である物品特定情報を検出する。
【0050】
(情報端末300の構成)
情報端末300は、物品特定情報検出部102と、位置決定部103と、物品情報保持部104と、集荷情報保持部105と、位置情報取得部106と、位置情報送信部301とを有する。ここで、位置情報送信部301以外の構成については、第1実施形態と同様である。
位置情報送信部301は、位置情報取得部106で取得された位置情報を携帯型端末400に送信する。本実施形態においては、Wifiによって位置情報を携帯型端末400に送信するが、これに限定されるものではない。赤外線通信、Bluetooth、無線LAN等の無線通信方式を用いてもよい。
【0051】
集荷指示者は情報端末300を操作して、集荷対象となる物品の集荷情報を入力すること等により、集荷情報保持部105は、入力された集荷情報を保持する。この時、物品情報保持部104で保持された物品情報の一覧(すなわち物品倉庫に陳列されている物品の物品特定情報の一覧)を表示するGUI(Graphical User Interface)が情報端末300の画面に表示されるようになっていてもよい。そして、集荷指示者はそのGUIに表示される物品情報の一覧から集荷すべき物品をタッチパネル、キーボード、マウス等の入力装置を用いて選択し、選択された物品の物品特定情報が集荷情報として保存されるようになっていてもよい。これにより、集荷指示者は簡単に集荷対象物品の指定を行うことができる。
【0052】
(携帯型端末400の構成)
携帯型端末400は、位置情報保持部401と、位置情報送信部402とを有する。
位置情報保持部401は、情報端末300から送信される位置情報を受信して内部メモリ等の記憶装置に保持する。
位置情報送信部402は、位置情報保持部401に保持されている位置情報を近距離無線通信にて集荷指示装置200に送信する。本実施形態においては、Bluetoothによって位置情報を集荷指示装置200に送信するが、これに限定されるものではない。赤外線通信、Wifi、無線LAN等の無線通信方式を用いてもよい。また、位置情報送信部402は、例えば携帯型端末400と集荷指示装置200との距離が所定の距離内となると、自動的に位置情報の送信を開始するようになっていてもよい。
また、集荷指示装置200の位置提示部107は、携帯型端末400の位置情報送信部402から送信される位置情報を受信し、受信した位置情報から、集荷対象物品の位置を携帯型端末400の集荷作業者に提示する。
【0053】
(集荷システムにおける処理)
以下、図12、図13、および図14に示すフロー図を参照して、本実施形態に係る集荷システムにおける処理例について説明する。
(カメラ210の処理フロー)
図12は、集荷指示装置200のカメラ210の処理フロー図である。
撮像部101は、集荷指示装置200の周辺の画像を撮像する(ステップS301)。そして、撮像した画像を情報端末300にLAN等のネットワークを介して送信する(ステップS302)。
カメラ210の電源がOFFされる等の理由により終了するまで、以上の処理を繰り返す(ステップS303)。
【0054】
なお、図12に示されるカメラ210での処理は、あらかじめ設定された時間間隔ごとに繰り返し実行される。具体的には、5〜10分程度が好適であるが、これに限定されるものではない。例えば、リアルタイム(極微小な時間単位で撮影する)処理であってもよい。カメラ210は物品倉庫において物品が保管されている状態を把握することを目的として周辺画像を撮像する。よって、例えば、物品倉庫内において保管される物品が頻繁に搬入・搬出される(物品の陳列状態が頻繁に変化する)時間帯には、短い時間間隔で撮像処理を行い、搬入・搬出が少ない時間帯には長い時間間隔で撮像処理を行うようになっていてもよい。さらに、物品の搬入・搬出が行われない時間帯には撮像処理を行わないようになっていてもよい。
【0055】
さらに、ある特定のイベントが発生した場合にのみ撮像処理を行うようになっていてもよい。例えば、物品倉庫管理者の任意のタイミングにて撮像処理が行われる等となっていてもよい。
また、撮像画像の送信処理(ステップS302)は、特定のタイミングで実行するようになっていてもよい。例えば、撮像部101でリアルタイム(極微小な時間単位で撮影する)処理もしくは数十ミリ秒程度の間隔で物品倉庫内の周辺を撮像しておき、動体検知処理により物品の搬入・搬出が行われることによる画像変化を検出した場合等に、撮像画像の送信処理(ステップS302)を行うようになっていてもよい。これにより、処理負荷を抑制しつつ、必要な物品の陳列状況を的確に把握することができる。
【0056】
(情報端末300の処理フロー)
図13は、情報端末300において実行される処理を示す処理フロー図である。
まず、図13(a)のフロー図について説明する。図13(a)の処理は、カメラ210から撮像画像が送信される度に実行される処理である。
物品特定情報検出部102は、カメラ210の撮像画像送信部201から送信される撮像画像を受信して、この撮像画像中に物品特定情報(QRコード等)が含まれているか判断する(ステップS401)。含まれていない場合には、ステップS401の処理が繰り返される。また、撮像画像中に物品特定情報が含まれている場合には、本ステップにおいて、物品特定情報の撮像画像中における位置も検出される。
【0057】
撮像画像中に物品特定情報が含まれている場合には、位置決定部103は、物品特定情報の撮像画像中における位置から物品の位置を決定する(ステップS403)。なお、ここで決定される物品の位置とは、ステップS403で検出された物品に付されている物品特定情報(QRコード等)の撮像画像中における位置そのものであってもよいし、物品特定情報の撮像画像中における位置から物品倉庫内における物品の実際の位置を換算したものであってもよい。物品情報保持部104は、ステップS402で特定された物品特定情報と、ステップS403で決定された物品の位置とを関連づけた物品情報を、メモリ等の記憶装置に記憶して保持する(ステップS404)。
情報端末300の電源がOFFされる等の理由により終了するまで、以上の処理を繰り返す(ステップS408)。これにより、常に最新の物品情報が情報端末300に保存される。
【0058】
次に、図13(b)のフロー図について説明する。図13(b)の処理は、集荷作業を行う際に実行される処理である。
位置情報取得部106は、集荷情報保持部105が保持している集荷情報を読み出す(ステップS411)。この集荷情報は、例えば、集荷指示者や集荷作業者等が情報端末300に入力し、入力された集荷情報が情報端末300内部のメモリ等に保存されたものである。そして、図13(a)のステップS404にてメモリ等の記憶装置に記憶された物品情報を参照して、ステップS411で読み出した集荷情報に含まれている集荷対象物品の物品特定情報に対応する位置情報を取得する(ステップS412)。
位置情報送信部301は、ステップS412で取得した集荷対象物品の位置情報を携帯型端末400に送信する(ステップS413)。
【0059】
なお、図13(b)の処理が実行されるタイミングは、具体的には、例えば集荷作業者が集荷作業を開始する直前である。すなわち、集荷するべき物品が決定されて情報端末300に入力された後、ステップS411〜S413の処理が実行され、その後、集荷作業者は集荷対象物品の位置情報が送信されて保存された携帯型端末400を携行して、物品倉庫で集荷作業を行う。
【0060】
(携帯型端末400の処理フロー)
図14は、携帯型端末400の処理フロー図である。
位置情報保持部401は、情報端末300から送信される集荷対象物品の位置情報を受信する(ステップS501)。受信した位置情報を携帯型端末400の内部のメモリ等に保持する(ステップS502)。
携帯型端末400と集荷指示装置200との距離が所定距離内になった、又は集荷実行の指示等により、集荷指示装置200との近距離無線通信を開始した場合には(ステップS503)、ステップS504にて保持した集荷対象物品の位置情報を集荷指示装置200に送信する(ステップS504)。
【0061】
(集荷指示装置200の処理フロー)
図15は、携帯型端末400から集荷対象物品の位置情報を送信された集荷指示装置200が実行する処理を示すフロー図である。
位置提示部107は、携帯型端末400から集荷対象物品の位置情報を受信する(ステップS601)。さらに、レーザ出力部108は、受信した位置情報をもとに集荷対象物品(もしくは集荷対象物品の物品特定情報)にレーザを照射する(ステップS602)。
なお、上記の説明においては、図13(a)に示される物品情報を生成して保持する処理を情報端末300で実行することとしているが、カメラ210で実行するようになっていてもよい。そして、カメラ210で生成された物品情報が情報端末300に送信されるようになっていてもよい。
【0062】
(第3実施形態)
(集荷システムの概要)
まず、図16を参照して、本実施形態に係る集荷システムの概要について説明する。
本実施形態の集荷システムは、第2実施形態と同様に、集荷指示装置200と、情報端末300と、携帯型端末400と、を含んで構成される。第2実施形態との違いは、物品倉庫内での周辺の撮像処理を行わない点である。例えば、集荷指示者が集荷すべき集荷対象物品がいずれの場所に陳列されているかをあらかじめ知っている場合等を想定している。
【0063】
(集荷システムの構成)
図17は、本実施形態に係る集荷システムの構成例を示す図である。なお、図17において、第2実施形態の構成と同様の構成は同一符号によって示す。また、本実施形態に係る集荷システムにおける位置情報等の構成については、第1実施形態と同様である。
本実施形態に係る集荷システムでは、あらかじめ集荷対象物品の位置情報が情報端末300のメモリ等に保存されており、位置情報送信部301から携帯型端末400の位置情報保持部401に送信される。また、集荷対象物品は、例えば、集荷指示者が専用のGUI等を介してマウス等の入力装置を用いて集荷対象物品の指定の入力を行い、集荷対象物品指定部302において、このユーザの入力を受け付けることによって決定される。
【0064】
すなわち、このような処理によって、集荷対象物品指定部302は、物品倉庫等の物品収集場に収集されている物品の中から物品収集場内における位置を集荷作業者に提示すべき集荷対象物品の指定を行う。そして、この集荷対象物品指定部302により指定された集荷対象物品の位置情報が情報端末300のメモリ等から読み出される。読み出された位置情報は、携帯型端末400の位置情報送信部402から集荷指示装置200に送信される。
集荷指示装置200の位置提示部107は、携帯型端末400から送信される位置情報に示される集荷対象物品の位置に、レーザ出力部108からレーザが照射されることにより集荷対象物品の位置を集荷作業者に提示する。
【0065】
なお、上記各実施形態に説明した集荷システムにおける各装置は、図示しないCPU(Central Processing Unit)、RAMやROM等の記憶装置、ネットワークインターフェイス等の一般的なコンピュータの構成と同様の構成により実現される。また、上記に説明した各構成の機能は、例えば、CPUが記憶装置に記憶されているプログラムを読み出して実行することによって実現される機能である。また、物品情報保持部104、集荷情報保持部105、位置情報保持部401は、メモリ等の記憶装置に設けられたデータ記憶領域であり、記憶する情報をデータベース等の形式で記憶して保持する。
【0066】
(まとめ)
上記に説明したように、本発明の一実施形態によれば、集荷作業者は物品倉庫等の物品収集場において目的の物品を容易に集荷することが可能となり、集荷作業の労力を省き、作業時間を大幅に短縮することができる。また、集荷作業に不慣れな作業者であっても、容易に集荷作業を行うことができる。
なお、本発明の範囲は、図示され記載された例示的な実施形態に限定されるものではなく、本発明が目的とするものと均等な効果をもたらすすべての実施形態をも含む。さらに、本発明の範囲は、すべての開示されたそれぞれの特徴のうち特定の特徴のあらゆる所望する組み合わせによって画されうる。
【符号の説明】
【0067】
10 作業者
11 物品
12 レーザ光線
20 撮像画像
21、22、23 QRコード
24 撮像画像中の中央エリア
100 集荷補助装置
101 撮像部
102 物品特定情報検出部
103 位置決定部
104 物品情報保持部
105 集荷情報保持部
106 位置情報取得部
107 位置提示部
108 レーザ出力部
200 集荷指示装置
201 撮像画像送信部
210 カメラ
300 情報端末
301 位置情報送信部
302 集荷対象物品指定部
400 携帯型端末
401 位置情報保持部
402 位置情報送信部
【特許請求の範囲】
【請求項1】
撮像部と、
前記撮像部により撮像された撮像画像中において物品収集場に収集されている物品を特定するための情報である物品特定情報を検出する物品特定情報検出部と、
前記物品特定情報が検出された場合には、前記物品特定情報の前記撮像画像中における位置から、前記物品収集場内における前記物品の位置を決定する位置決定部と、
検出された前記物品特定情報と、決定された前記物品の位置を示す位置情報とを関連付けた物品情報を保持する物品情報保持部と、
集荷対象物品の前記物品特定情報を保持する集荷情報保持部と、
前記物品情報保持部に保持されている前記物品情報から、前記集荷対象物品の前記物品特定情報に対応する前記集荷対象物品の前記位置情報を取得する位置情報取得部と、
取得された前記位置情報から、前記集荷対象物品の位置を集荷作業者に視認可能に提示することで、前記集荷作業者に前記集荷対象物品が集荷対象であることを認識せしめる位置提示部と、
を有する集荷システム。
【請求項2】
可視光レーザを出力するレーザ出力部をさらに有し、
前記位置提示部は、前記可視光レーザを前記集荷対象物品に照射することで前記集荷対象物品の位置を前記集荷作業者に提示することを特徴とする請求項1に記載の集荷システム。
【請求項3】
前記位置提示部は、前記物品特定情報の前記撮像画像中における位置が、あらかじめ定められた前記撮像画像中のあらかじめ定められた所定の領域から外れている場合には、前記可視光レーザを前記集荷対象物品に照射することに代えて、前記可視光レーザで前記集荷対象物品の位置方向を表す図形もしくは文字を描画することで前記集荷対象物品の位置を前記集荷作業者に提示することを特徴とする請求項2に記載の集荷システム。
【請求項4】
前記集荷作業者の頭部に装着可能な形状であることを特徴とする請求項1から3のいずれか一項に記載の集荷システム。
【請求項5】
前記撮像部は、前記集荷作業者の目線と同一方向の前記撮像画像を撮像することを特徴とする請求項1から4のいずれか一項に記載の集荷システム。
【請求項6】
前記撮像部は、前記集荷作業者の目線と異なる方向の前記撮像画像を撮像し、
前記位置決定部は、前記撮像部の撮像方向と、前記物品特定情報の前記撮像画像中における位置とから、前記物品の位置を決定することを特徴とする請求項1から4のいずれか一項に記載の集荷システム。
【請求項7】
情報端末と、前記情報端末と通信を行う携帯型端末と、前記携帯型端末と近距離無線通信を行う集荷指示装置と、を有する集荷システムであって、
前記情報端末は、
前記集荷指示装置から送信される前記撮像画像中において物品収集場に収集されている物品を特定するための情報である物品特定情報を検出する物品特定情報検出部と、
前記物品特定情報が検出された場合には、前記物品特定情報の前記撮像画像中における位置から、前記物品収集場内における前記物品の位置を決定する位置決定部と、
検出された前記物品特定情報と、決定された前記物品の位置を示す位置情報とを関連付けた物品情報を保持する物品情報保持部と、
集荷対象物品の前記物品特定情報を保持する集荷情報保持部と、
前記物品情報保持部に保持されている前記物品情報から、前記集荷対象物品の前記物品特定情報に対応する前記集荷対象物品の前記位置情報を取得する位置情報取得部と、
取得された前記位置情報を前記携帯型端末に送信する第1の位置情報送信部と、を有し、
前記携帯型端末は、集荷作業者が携行する端末であって、
前記情報端末から送信される前記位置情報を受信して保持する位置情報保持部と、
前記位置情報保持部に保持されている前記位置情報を前記近距離無線通信にて前記集荷指示装置に送信する第2の位置情報送信部と、を有し、
前記集荷指示装置は、
撮像部と、
前記撮像部により撮像された撮像画像を前記情報端末に送信する撮像画像送信部と、
前記携帯型端末から送信される前記位置情報から、前記集荷対象物品の位置を、前記集荷作業者に視認可能に提示することで、前記集荷作業者に前記集荷対象物品が集荷対象であることを認識せしめる位置提示部と、を有する
ことを特徴とする集荷システム。
【請求項8】
撮像部と、物品特定情報検出部と、位置決定部と、物品情報保持部と、集荷情報保持部と、位置情報取得部と、位置情報取得部と、位置提示部と、を有する集荷システムが実行する集荷方法であって、
前記撮像部が、撮像を行う第1のステップと、
前記物品特定情報検出部が、前記撮像部により撮像された撮像画像中において物品収集場に収集されている物品を特定するための情報である物品特定情報を検出する第2のステップと、
前記位置決定部が、前記物品特定情報が検出された場合には、前記物品特定情報の前記撮像画像中における位置から、前記物品収集場内における前記物品の位置を決定する第3のステップと、
前記物品情報保持部が、検出された前記物品特定情報と、決定された前記物品の位置を示す位置情報とを関連付けた物品情報を記憶して保持する第4のステップと、
前記位置情報取得部が、前記集荷情報保持部から集荷対象物品の前記物品特定情報を読み出す第5のステップと、
前記位置情報取得部が、前記物品情報保持部に保持されている前記物品情報から、読み出された前記集荷対象物品の前記物品特定情報に対応する前記集荷対象物品の前記位置情報を取得する第6のステップと、
前記位置提示部が、取得された前記位置情報から、前記集荷対象物品の位置を集荷作業者に認識可能に提示することで、前記集荷作業者に前記集荷対象物品が集荷対象であることを認識せしめる第7のステップと、
を含むことを特徴とする集荷方法。
【請求項9】
物品収集場に収集されている物品の中から、前記物品収集場内における位置を集荷作業者に提示すべき集荷対象物品を指定する集荷対象物品指定部と、
指定された前記集荷対象物品の位置を示す位置情報を出力する位置情報出力部と、
出力された前記位置情報から、前記集荷対象物品の位置を、前記集荷作業者に視認可能に提示することで、前記集荷作業者に前記集荷対象物品が集荷対象であることを認識せしめる位置提示部と、
を有する集荷システム。
【請求項1】
撮像部と、
前記撮像部により撮像された撮像画像中において物品収集場に収集されている物品を特定するための情報である物品特定情報を検出する物品特定情報検出部と、
前記物品特定情報が検出された場合には、前記物品特定情報の前記撮像画像中における位置から、前記物品収集場内における前記物品の位置を決定する位置決定部と、
検出された前記物品特定情報と、決定された前記物品の位置を示す位置情報とを関連付けた物品情報を保持する物品情報保持部と、
集荷対象物品の前記物品特定情報を保持する集荷情報保持部と、
前記物品情報保持部に保持されている前記物品情報から、前記集荷対象物品の前記物品特定情報に対応する前記集荷対象物品の前記位置情報を取得する位置情報取得部と、
取得された前記位置情報から、前記集荷対象物品の位置を集荷作業者に視認可能に提示することで、前記集荷作業者に前記集荷対象物品が集荷対象であることを認識せしめる位置提示部と、
を有する集荷システム。
【請求項2】
可視光レーザを出力するレーザ出力部をさらに有し、
前記位置提示部は、前記可視光レーザを前記集荷対象物品に照射することで前記集荷対象物品の位置を前記集荷作業者に提示することを特徴とする請求項1に記載の集荷システム。
【請求項3】
前記位置提示部は、前記物品特定情報の前記撮像画像中における位置が、あらかじめ定められた前記撮像画像中のあらかじめ定められた所定の領域から外れている場合には、前記可視光レーザを前記集荷対象物品に照射することに代えて、前記可視光レーザで前記集荷対象物品の位置方向を表す図形もしくは文字を描画することで前記集荷対象物品の位置を前記集荷作業者に提示することを特徴とする請求項2に記載の集荷システム。
【請求項4】
前記集荷作業者の頭部に装着可能な形状であることを特徴とする請求項1から3のいずれか一項に記載の集荷システム。
【請求項5】
前記撮像部は、前記集荷作業者の目線と同一方向の前記撮像画像を撮像することを特徴とする請求項1から4のいずれか一項に記載の集荷システム。
【請求項6】
前記撮像部は、前記集荷作業者の目線と異なる方向の前記撮像画像を撮像し、
前記位置決定部は、前記撮像部の撮像方向と、前記物品特定情報の前記撮像画像中における位置とから、前記物品の位置を決定することを特徴とする請求項1から4のいずれか一項に記載の集荷システム。
【請求項7】
情報端末と、前記情報端末と通信を行う携帯型端末と、前記携帯型端末と近距離無線通信を行う集荷指示装置と、を有する集荷システムであって、
前記情報端末は、
前記集荷指示装置から送信される前記撮像画像中において物品収集場に収集されている物品を特定するための情報である物品特定情報を検出する物品特定情報検出部と、
前記物品特定情報が検出された場合には、前記物品特定情報の前記撮像画像中における位置から、前記物品収集場内における前記物品の位置を決定する位置決定部と、
検出された前記物品特定情報と、決定された前記物品の位置を示す位置情報とを関連付けた物品情報を保持する物品情報保持部と、
集荷対象物品の前記物品特定情報を保持する集荷情報保持部と、
前記物品情報保持部に保持されている前記物品情報から、前記集荷対象物品の前記物品特定情報に対応する前記集荷対象物品の前記位置情報を取得する位置情報取得部と、
取得された前記位置情報を前記携帯型端末に送信する第1の位置情報送信部と、を有し、
前記携帯型端末は、集荷作業者が携行する端末であって、
前記情報端末から送信される前記位置情報を受信して保持する位置情報保持部と、
前記位置情報保持部に保持されている前記位置情報を前記近距離無線通信にて前記集荷指示装置に送信する第2の位置情報送信部と、を有し、
前記集荷指示装置は、
撮像部と、
前記撮像部により撮像された撮像画像を前記情報端末に送信する撮像画像送信部と、
前記携帯型端末から送信される前記位置情報から、前記集荷対象物品の位置を、前記集荷作業者に視認可能に提示することで、前記集荷作業者に前記集荷対象物品が集荷対象であることを認識せしめる位置提示部と、を有する
ことを特徴とする集荷システム。
【請求項8】
撮像部と、物品特定情報検出部と、位置決定部と、物品情報保持部と、集荷情報保持部と、位置情報取得部と、位置情報取得部と、位置提示部と、を有する集荷システムが実行する集荷方法であって、
前記撮像部が、撮像を行う第1のステップと、
前記物品特定情報検出部が、前記撮像部により撮像された撮像画像中において物品収集場に収集されている物品を特定するための情報である物品特定情報を検出する第2のステップと、
前記位置決定部が、前記物品特定情報が検出された場合には、前記物品特定情報の前記撮像画像中における位置から、前記物品収集場内における前記物品の位置を決定する第3のステップと、
前記物品情報保持部が、検出された前記物品特定情報と、決定された前記物品の位置を示す位置情報とを関連付けた物品情報を記憶して保持する第4のステップと、
前記位置情報取得部が、前記集荷情報保持部から集荷対象物品の前記物品特定情報を読み出す第5のステップと、
前記位置情報取得部が、前記物品情報保持部に保持されている前記物品情報から、読み出された前記集荷対象物品の前記物品特定情報に対応する前記集荷対象物品の前記位置情報を取得する第6のステップと、
前記位置提示部が、取得された前記位置情報から、前記集荷対象物品の位置を集荷作業者に認識可能に提示することで、前記集荷作業者に前記集荷対象物品が集荷対象であることを認識せしめる第7のステップと、
を含むことを特徴とする集荷方法。
【請求項9】
物品収集場に収集されている物品の中から、前記物品収集場内における位置を集荷作業者に提示すべき集荷対象物品を指定する集荷対象物品指定部と、
指定された前記集荷対象物品の位置を示す位置情報を出力する位置情報出力部と、
出力された前記位置情報から、前記集荷対象物品の位置を、前記集荷作業者に視認可能に提示することで、前記集荷作業者に前記集荷対象物品が集荷対象であることを認識せしめる位置提示部と、
を有する集荷システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2013−14423(P2013−14423A)
【公開日】平成25年1月24日(2013.1.24)
【国際特許分類】
【出願番号】特願2011−150087(P2011−150087)
【出願日】平成23年7月6日(2011.7.6)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.QRコード
2.Bluetooth
【出願人】(311005998)株式会社インスピーディア (1)
【Fターム(参考)】
【公開日】平成25年1月24日(2013.1.24)
【国際特許分類】
【出願日】平成23年7月6日(2011.7.6)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.QRコード
2.Bluetooth
【出願人】(311005998)株式会社インスピーディア (1)
【Fターム(参考)】
[ Back to top ]