
雪下野菜の収穫方法及び収穫装置
【課題】従来雪下の野菜収穫のための除雪作業手段は人手によるほかなかったが、除雪作業を機械化することで軽労化をはかる。
【解決手段】走行車体1に除雪装置15を装着し該走行車体1を圃場に形成する畝に沿って走行させながらこの畝面U及び該畝面Uに生育する野菜V,V…に堆積する積雪を上記除雪装置1によって生育した野菜V,V…を残して除去することによって、主として手作業に頼る収穫作業の際の除雪作業を無くしあるいは省力化し、該収穫作業の軽労化及び能率向上を図ることができる。
【解決手段】走行車体1に除雪装置15を装着し該走行車体1を圃場に形成する畝に沿って走行させながらこの畝面U及び該畝面Uに生育する野菜V,V…に堆積する積雪を上記除雪装置1によって生育した野菜V,V…を残して除去することによって、主として手作業に頼る収穫作業の際の除雪作業を無くしあるいは省力化し、該収穫作業の軽労化及び能率向上を図ることができる。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、冬季に畦面で成長する雪下野菜の収穫方法および収穫装置に関する。
【背景技術】
【0002】
ほうれん草やキャベツなど冬季の積雪下で生育する形態は地域の気象条件によっては甘くて美味しい野菜が得られるとの知見に基づき当該地域で慣行されている。
この生育方法によると、所謂雪下で成育し収穫時期となり、収穫作業の前段で除雪作業を余儀なくされる。
【0003】
従来は手作業で除雪を行う作業形態のため重労働を強いられ機械化等の改善が求められていた。なお、農用トラクタを利用した除雪装置は公知であるが(例えば特許文献1)、雪下の野菜の収穫を前提とするものでない。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2001−295314号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記のように、雪下の野菜収穫のための除雪作業手段は人手によるほかなく、本発明は除雪作業を機械化することで軽労化をはかるものである。
【課題を解決するための手段】
【0006】
請求項1に記載の発明は、走行車体1に除雪装置15を装着し該走行車体1を圃場に形成する畝に沿って走行させながらこの畝面U及び該畝面Uに生育する野菜V,V…に堆積する積雪を上記除雪装置1によって生育した野菜V,V…を残して除去する雪下野菜収穫前処理方法とする。
【0007】
このように構成すると、畝面に生育する雪下野菜の収穫作業の前に畝面及び野菜に堆積する積雪を除去する。
請求項2に記載の発明は、走行車体1に除雪装置15を昇降自在に装着し、この除雪装置15を畝面Uまたは所定の水平基準Lに基づき自動昇降制御する請求項1に記載の雪下野菜収穫前処理方法とする。
【0008】
このように構成すると、除雪装置15は自動的に常時畝面Uから所定高さ位置で除雪作業を行うものとなり、走行車体1がピッチング状態となっても雪下にある野菜に干渉することなく該除雪作業を継続できる。
【0009】
請求項3に記載の発明は、走行車体1に除雪装置15を左右ローリング自在に装着し、この除雪装置15を自動水平制御する請求項1又は請求項2に記載の雪下野菜収穫前処理方法とする。このように構成すると、除雪装置15は走行車体1の左右ローリングに関わらず略水平状態に保持されるため、雪下野菜を干渉しないで除雪作業を行う。
【0010】
請求項4に記載の発明は、圃場の畝を跨ぐ左右の走行装置2L,2Rを備えた走行車体1の前部又は後部に昇降連動機構13を介して昇降調整自在に除雪装置15を装着してなる雪下野菜収穫前処理装置とする。該走行車体1を圃場に形成する畝に沿って走行させながらこの畝面U及び該畝面Uに生育する野菜に堆積する積雪を上記除雪装置15を昇降調整しながら生育野菜を残して除去する。
【0011】
請求項5に記載の発明は、所定水平基準Z又は畝面Uに対する除雪装置15の位置を検出する手段31を設け、前記昇降連動機構13により除雪装置15を予め設定した位置との比較に基づき昇降制御する構成とした請求項4に記載の雪下野菜収穫前処理装置とする。このように構成すると、検出手段31の検出結果に基づき除雪装置15は走行車体に対して昇降制御され該除雪装置15は自動的に常時畝面Uから所定高さ位置で除雪作業を行うものとなり、走行車体がピッチング状態となっても雪下にある野菜に干渉することなく該除雪作業を継続できる。
【0012】
請求項6に記載の発明は、走行車体1に対して除雪装置15を左右ローリング自在に装着すると共に除雪装置15と走行車体1との間にローリング連動機構18を設け、除雪装置15に左右傾斜検出手段33を備え、該左右傾斜検出手段33の検出結果に基づきローリング連動機構18を介して除雪装置15を自動水平制御する請求項4又は請求項5に記載の雪下野菜収穫前処理装置とする。このように構成すると、左右傾斜検出手段33の検出結果により除雪装置15は走行車体1に対して左右傾斜制御され該除雪装置15は自動的に水平状態とされてほぼ水平の畝面Uに生育する雪下野菜Vに対して干渉する恐れ少なく除雪作業を継続して行うことができる。
【発明の効果】
【0013】
請求項1又は請求項4に記載の発明によると、畝面に生育する雪下野菜の収穫作業の前に畝面及び野菜に堆積する積雪を除去することによって主として手作業に頼る収穫作業の際の除雪作業を無くしあるいは省力化し、該収穫作業の軽労化及び能率向上を図ることができる。
【0014】
請求項2及び請求項5に記載の発明によると、除雪装置は自動的に常時畝面から所定高さ位置で除雪作業を行うものとなり、走行車体がピッチング状態となっても雪下にある野菜に干渉することなく該除雪作業を継続できる。
【0015】
請求項3及び請求項6に記載の発明によると、除雪装置は走行車体の左右ローリングに関わらず略水平状態に保持されるため、雪下野菜を干渉しないで除雪作業を行うことができる。
【図面の簡単な説明】
【0016】
【図1】第1実施例の全体側面図である。
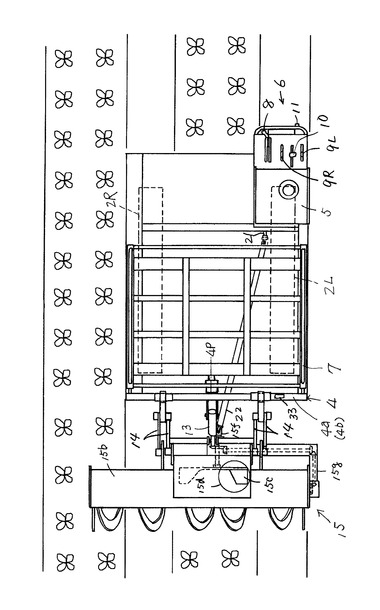
【図2】その平面図である。
【図3】その背面図である。
【図4】昇降制御の一例を示す概要側面図である。
【図5】制御ブロック図である。
【図6】隣接作業の概要を示す平面図である。
【図7】第2実施例の全体側面図である。
【図8】その平面図である。
【図9】その背面図である。
【図10】第3実施例の側面図である。
【図11】その平面図である。
【図12】その背面図である。
【図13】除雪装置の異なる例を示す平面図である。
【図14】更に他の除雪装置の例を示す平面図である。
【図15】その作用を示す平面図である。
【発明を実施するための形態】
【0017】
この発明の実施の態様を図面に基づき説明する。
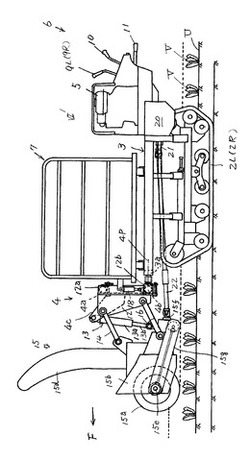
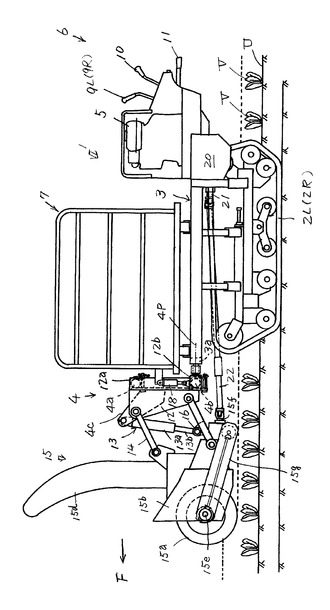
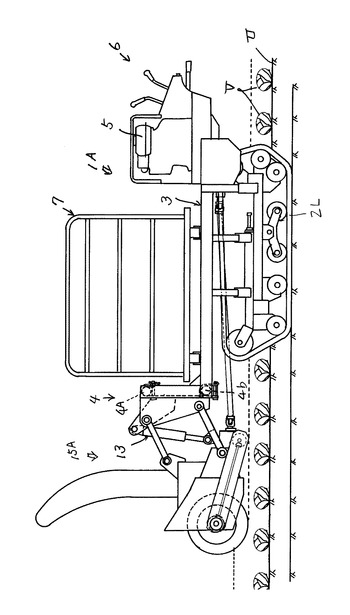
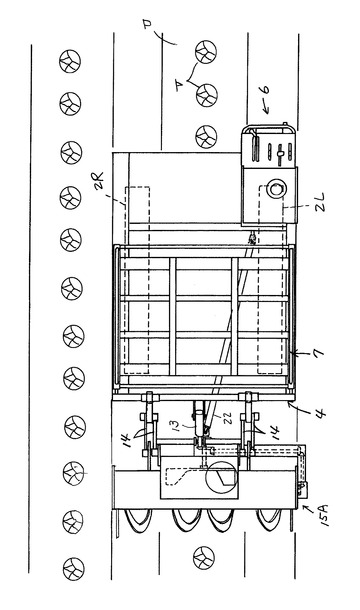
走行車体1は左右のクローラ型走行装置2L,2Rによって支持され、フレーム3の前部に作業機装着用ヒッチ部材4を立設し、後部一側(図例では左側)にはエンジン5を搭載すると共にその直後に位置して操作部6を配設する。フレーム3の中間部上側はコンテナ状に保護枠で囲われた収納部7を構成する。
【0018】
前記左右のクローラ型走行装置2L,2Rは幅狭のクローラを装着すると共にフレーム3の地上高も大に設定している。このクローラ型走行装置2L,2Rの左右間隔を図外調整装置によって拡大又は縮小すべく構成している。このように構成することによって、圃場の畝を跨ぎ該畝間隔底部にクローラを走行させることによって畝に沿った走行を行うことができる。
【0019】
なお、操作部6には、前後進切替レバー8、左右のサイドクラッチ切替レバー9L,9R、昇降レバー10、デッドマンクラッチレバー11等を配設している。
前記作業機装着用ヒッチ部材4は、上下並行の2つの水平枠4a,4bを剛体枠組構成して走行車体1の前部フレーム3aに前後方向ピボット軸芯4P回りに回動自在に連結構成されている。上記水平枠4a,4bには左右に平行リンクブラケット12,12をフック部材12a,12bを介して装着し、中央には昇降連動機構としての昇降油圧シリンダ機構13のシリンダ13a装着用のブラケット4cを設ける。上記平行リンクブラケット12,12に一端を連結する左右の平行リンク14,14の他端を、作業機としての除雪装置15のフレーム部15aに装着し、昇降油圧シリンダ機構13のピストン部13bを平行リンク14,14の下部側リンク同士を連結する連結枠16に装着している。該油圧昇降シリンダ機構13の短縮によって除雪装置15を走行車体1に対して上昇し、逆に伸出によって除雪装置を下降すべく構成している。
【0020】
前記作業機装着用ヒッチ部材4の一側(図例では進行方向F左側)において、該ヒッチ部材4の下方側水平枠4bと走行車体1側の固定部材から延出するブラケット17との間に油圧伸縮自在なローリング連動機構としての油圧ローリングシリンダ機構18を設けている。該油圧ローリングシリンダ機構18の伸出作動によって除雪装置15は走行車体1に対し前記ピボット軸心4P回りに左側が上昇し、逆に短縮作動によって除雪装置15は左側が下降する相対関係に設けられる。
【0021】
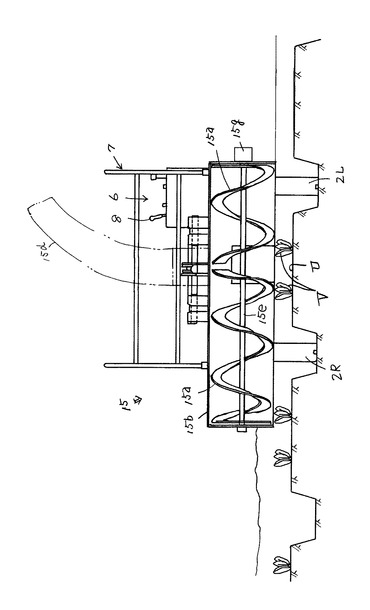
除雪装置15は、公知の構成であり、横軸回りに回転するオーガ部材15a,15aとこのオーガ部材15a,15aの進行方向後方側を囲うカバー部材15bと、ブロワ15cと放出筒15d等からなる。このうちオーガ部材15a,15bは回転駆動される水平軸15e回りに螺旋状を巻回固定する構成であり、この螺旋状は右半部と左半部に分割され夫々左螺旋又は右螺旋に形成されて当該水平軸に固定されている。オーガ部材15a,15aが駆動されると接触する雪は螺旋状に従い中央側に寄せられ、ブロワ15cの回転に伴って合流した雪を上方の放出筒15dに送り込み該放出筒15dの先端から放出する構成である。
【0022】
除雪装置15の前記水平軸15eやブロア15cの駆動軸(図示せず)には後方に突出する作業機入力軸15fに走行車体1側の前記エンジン5の駆動出力に連動する伝動ケース20内伝動機構部を経て変速動力を出力する作業機出力軸21との間を自在継手軸22によって連動連結する。作業機入力軸15fの駆動力はブロア15c駆動の後、側部伝動機構15gを経て水平軸15eを駆動する構成である。
【0023】
前記走行車体1における伝動ケース20内には、走行装置としてのクローラ2L,2Rを駆動する走行伝動機構(図示せず)を具備しており、エンジン動力を入り切りできる主クラッチの他、有段又は無段の変速機構、前記サイドクラッチ切替レバー9L,9Rに連動する旋回用サイドクラッチ等を内装している。
【0024】
走行車体1のフレーム3は梯形に構成され、左右フレームと前後フレームと左右乃至前後を連結する中間フレーム等からなり、図例では収穫野菜を収容する前記コンテナ型収容部7を搭載する構成としている。
【0025】
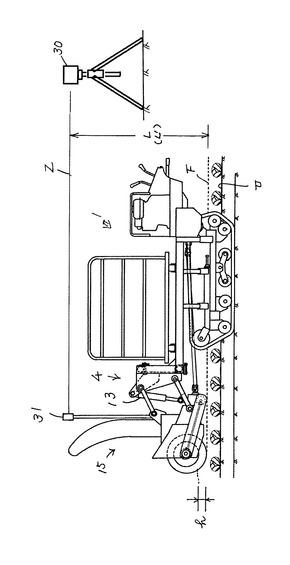
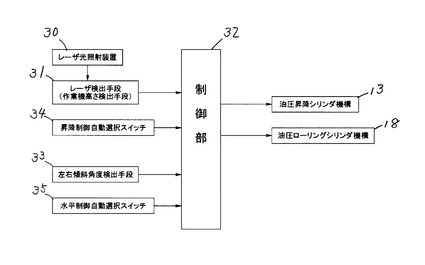
除雪装置15の自動制御について説明する。図4に示すように、圃場の端部にレーザ光Zを水平状態に照射できるレーザ光照射装置30を設け、除雪装置15の側に、上下方向に所定の受信範囲を受信範囲に構成したレーザ検出手段31を備える。レーザ検出手段31による受信信号は制御部32に出力され、制御部32ではこの受信信号が予め設定してある除雪面Fに一致するか否かをレーザ光Zのラインから除雪面Fまでの垂直距離Lに置き換えて判断し、レーザ検出手段31による検出結果により除雪面Fまでの測定距離L´が基準の垂直距離Lよりも「小」と検出すると前記油圧昇降シリンダ機構13に伸出出力し除雪装置15を下降させる(下降出力)。逆に基準垂直距離Lよりも「大」と判断されるときは短縮出力して除雪装置15を上昇させる(上昇出力)。なお、ある基準垂直距離Lは、作業者の判定による。すなわち雪下野菜の生育状況を予め確認しておき、前記昇降レバー10で除雪装置15を昇降調整しておき、当該垂直距離Lを図外の設定スイッチ手段等によって設定する。したがって、積雪面Sに凹凸があって雪下野菜を視認できなくても除雪装置15によって除去すべき雪量(除去高さ)hは自動判定され、基準垂直距離Lに基づいて除雪作業を行うことができる。一般に農業用トラクタによる耕耘及び畝立て作業はトラクタの水平制御手段によるものであるから、畝面Uは水平面に形成される。このため、前記基準垂直距離Lの設定によって雪下野菜を傷めずに除雪作業を行うことができる。
【0026】
上記の実施例では昇降制御手段としてレーザ光Zによる制御としたが、簡易的には除雪装置15のフレーム部から接触型の接地センサを構成し、該センサを畝面Uに摺接させながら作業を行うことにより畝面Uから除雪面Fまでの高さ(除雪高さ)hを検出しこれを予め設定した除雪高さHと対比しながら昇降制御することができる。
【0027】
また、図2のように、前記作業機装着用ヒッチ部材4に左右傾斜角度検出手段33を設けている。この左右傾斜角度検出手段33による検出傾斜角度θは制御部32に入力され、水平状態からの角度偏差△θを算出して油圧ローリングシリンダ機構18に伸出出力又は短縮出力をして除雪装置15を略水平姿勢に維持すべく水平制御する構成である。
【0028】
上例の作用について、作業者は畝面の生育野菜、例えばほうれん草の成長を確認し、収穫時期に至ると、走行車体1を畝に沿って走行させて収穫前処理としての除雪作業と共に収穫作業を行う。生育野菜の生育と共に、堆積する雪の除去量(高さ)hを勘案し、除雪装置15の基準垂直距離Lを決定し、制御部32にセットする。なお、このセット設定については予め数値入力したり、選択スイッチ操作によるなど既知の構成によって行う。そして、昇降制御自動選択スイッチ34及び水平制御自動選択スイッチ35を共にONする。
【0029】
このようにして各部を駆動し、走行車体1を前進させると、クローラ走行装置2L,2Rは畝間溝部に位置して走行しながら、除雪装置15は畝上面所定高さHで除雪を行う。併せて除雪装置15は水平姿勢を維持して走行車体1の移動に連れて除雪作業を行う。作業者は、走行車体1を自走させながら、その直後において除雪前処理後の畝面Uに生育する雪下野菜V,V…を掘り起こしてコンテナ型収容部7に収容していく。
【0030】
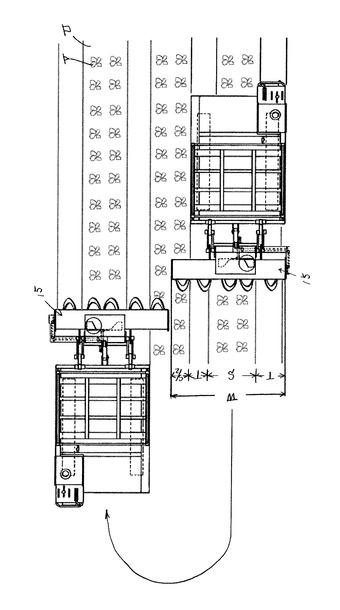
除雪装置15の除雪幅Wは、一畝間を跨いだ畝面Uの幅S、左右のクローラ走行装置2L,2Rが通行する畝間幅2T、および隣接する畝の半分S/2をカバーできる幅(W=S+2T+S/2)に設定している。したがって、図6に示すように、容易に隣接作業を行うことができる。
【0031】
放出筒15dは基端部側に対して縦軸芯周りに回動自在に設けられ、その放出口は360度に向き変更自在に構成しておくことにより、雪の放出先を設定でき、当該雪下野菜収穫前処理の除雪作業においては、既に収穫した畝側に放出するとよい。
【0032】
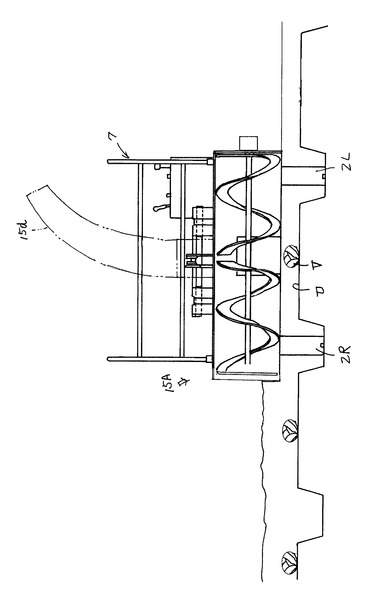
図7〜図9に示す第2の例は、上記の例と異なり、1畝1条の生育野菜(図例ではキャベツ)の収穫に関する。この場合には走行車体1が跨ぐ畝面の雪下野菜に対する除雪を行うものである。この場合には圃場端部での旋回動作に所定の空間を要するが、1畝1条であるから走行車体1の操縦操作が負担とならない。なお、左右のクローラ走行装置2L,2R間隔を拡縮できる構成とし、畝の幅に見合うよう調整できる構成としておくことにより異なる畝幅に対応でき畝を崩さずに作業を行うことができる。また、2畝2条のように複数畝に対応させることができる。
【0033】
図7〜図9の構成では前記ローリング制御に関係する構成部材を省略して走行車体1と除雪装置15Aとが一体的の構成である。畝間溝部を安定的に走行できる圃場においてはこのローリング制御を省略でき、コストダウンにつながる。なお、符号は図1〜図3の第1の例と共通のものは同一符号としている。
【0034】
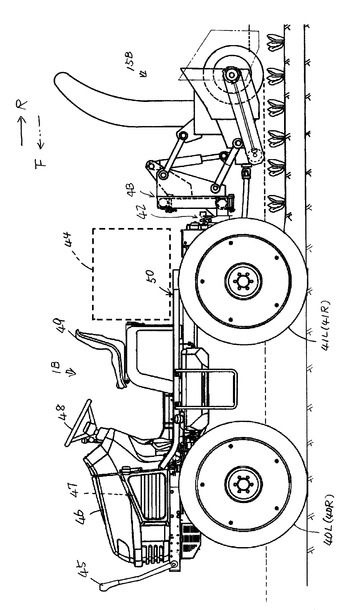
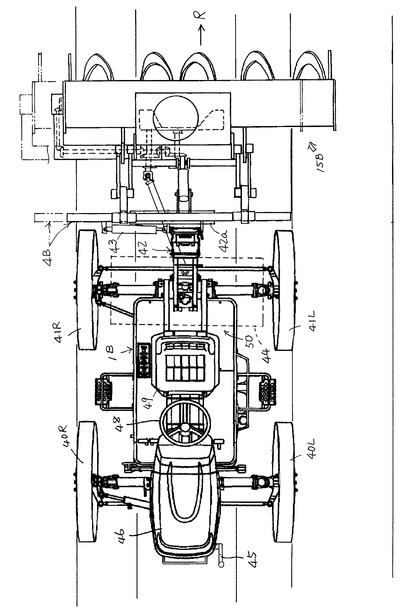
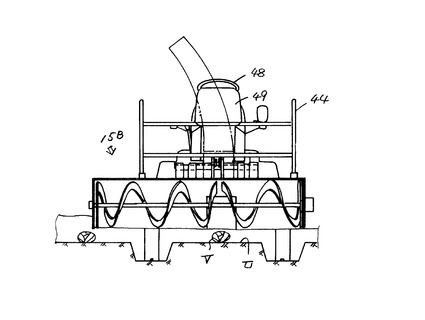
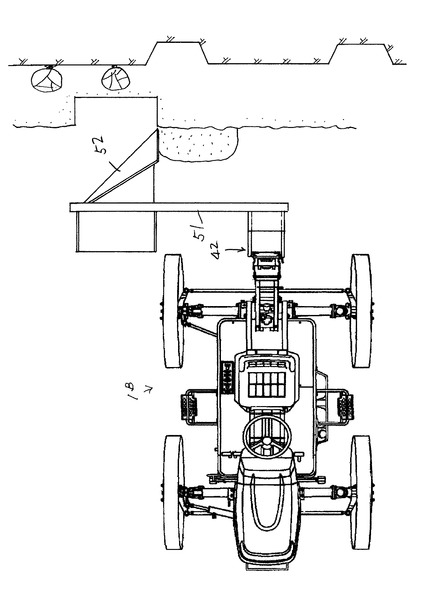
図10〜図12に示す構成は、トラクタ形態として走行車体を支持する前車輪40L,40R、および後車輪41L,41Rを全て同径に構成すると共に、走行車体1Bの後部に除雪装置15Bを装着する。すなわち、走行車体1Bの後部ブラケット42を昇降可能に構成し、この後部ブラケット42に作業機昇降用作業機ヒッチ4Bを設け、この作業機ヒッチ4Bに前記除雪装置15と同形態の除雪装置15Bを装着するが、後部ブラケット42の受け部42aに対して作業機ヒッチ4Bを左右に摺動自在に連結し、後部ブラケット42と作業機ヒッチ4Bとの間に設けた摺動シリンダ機構43の伸縮作動によって除雪装置15Bが走行車体1Bの後部に位置する状態と右側にオフセットする状態(図11中仮想線)に変更できるよう構成している。44はコンテナである。
【0035】
図10,図11に示すように、この実施例においては走行車体1Bをバック走行Rさせながら収穫作業を行う。乗員作業者は除雪装置15Bの上下高さを後部ブラケット42の設定高さによって設定し、摺動シリンダ機構43の伸縮によってオフセット量を設定する。これらの設定の後走行車体1Bをバック走行Rさせる。他の作業者は、圃場を歩行しながら除雪後の雪下野菜V,V…を収穫し、コンテナ44に収容する。走行車体1Bの移動と歩行作業者の作業速度とが合わないなどの事態が生じると、走行車体1Bの前側に設けた緊急クラッチレバー45を操作すると走行車体1Bは停止し、作業者の収穫作業速度との修正を行うことができる。
【0036】
なお、図10〜図12において、走行車体1Bは前部ボンネット46内のエンジン47、中間部にステアリングハンドル48及び搭乗者用シート49、後部に前記コンテナ44を載置するスペース50を有した構成としている。
【0037】
この第3の例における除雪装置15Bのカバー部材15bは、図10仮想線に示すように前後反転状態に交換でき、この状態のときは、走行車体1Bを前進Fさせながら、除雪を行うことができ、歩行作業者が除雪装置15Bの後部において収穫作業を行う。
【0038】
図13に示す例は、除雪装置15の代替構成を示す。図11における後部ブラケット42に水平姿勢でツールバー51を装着し、このツールバー51の一側端部に除雪プラウ52を装着する。除雪プラウ52は積雪部中に入り込んで進行しながら鋤き込んだ雪を反転移動させて近傍に盛り上げるものである。このように構成すると簡単な構成で、雪下野菜上方の雪を跳ね上げて別位置に排出できる。
【0039】
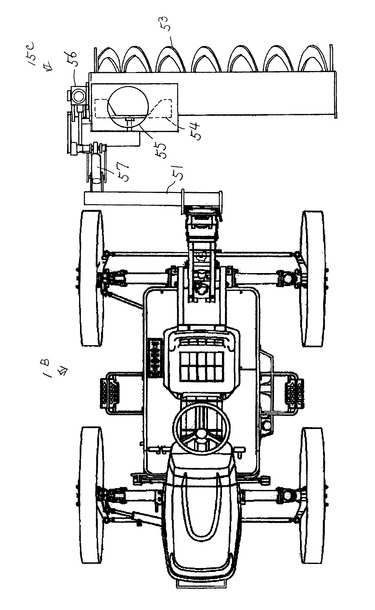
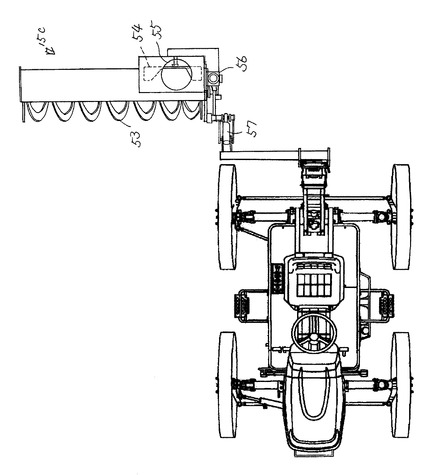
図14,15に示す例は、除雪装置の異なる例を示す。第1〜第3の例における除雪装置15や除雪装置15Bは異なる螺旋状からなるオーガ部材15a,15aの一対を一列に配設して除雪装置15,15A,15Bを構成するため、ブロア15cの位置及び放出筒15dの位置が中央になって、その分除去する雪の放出口からの飛散距離を大きくしなければならない。そこで、図14,図15に示すように除雪装置15Cにおいては、螺旋状53を同一形態として一側に除雪された雪を寄せる構成とし、この寄せられた雪をブロア54と放出筒55で放出するが、雪の放出先を左程に遠方へ投擲する必要がなくエネルギ消耗を来たさない。なお、この除雪装置15Cは一側の縦軸芯周りに回動自在に設けられ、該軸芯位置に配設した電動モータ56の正逆転連動によってその位置を走行車体1後部に位置にするか(図14)又は左右方向いずれかにオフセットした位置(図15)に組み替えできる。オーガ部材やブロアの駆動も電動モータ(図示せず)とすると構成を簡素にできる。符号57は昇降シリンダ機構である。
【符号の説明】
【0040】
1,1A,1B 走行車体
13 昇降連動機構(油圧昇降シリンダ機構)
15,15A,15B,15C 除雪装置
18 ローリング連動機構(ローリングシリンダ機構)
31 高さ検出手段(レーザ検出手段)
33 左右傾斜検出手段
L 基準垂直距離
h 除雪高さ
U 畝面
V 野菜
【技術分野】
【0001】
この発明は、冬季に畦面で成長する雪下野菜の収穫方法および収穫装置に関する。
【背景技術】
【0002】
ほうれん草やキャベツなど冬季の積雪下で生育する形態は地域の気象条件によっては甘くて美味しい野菜が得られるとの知見に基づき当該地域で慣行されている。
この生育方法によると、所謂雪下で成育し収穫時期となり、収穫作業の前段で除雪作業を余儀なくされる。
【0003】
従来は手作業で除雪を行う作業形態のため重労働を強いられ機械化等の改善が求められていた。なお、農用トラクタを利用した除雪装置は公知であるが(例えば特許文献1)、雪下の野菜の収穫を前提とするものでない。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2001−295314号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記のように、雪下の野菜収穫のための除雪作業手段は人手によるほかなく、本発明は除雪作業を機械化することで軽労化をはかるものである。
【課題を解決するための手段】
【0006】
請求項1に記載の発明は、走行車体1に除雪装置15を装着し該走行車体1を圃場に形成する畝に沿って走行させながらこの畝面U及び該畝面Uに生育する野菜V,V…に堆積する積雪を上記除雪装置1によって生育した野菜V,V…を残して除去する雪下野菜収穫前処理方法とする。
【0007】
このように構成すると、畝面に生育する雪下野菜の収穫作業の前に畝面及び野菜に堆積する積雪を除去する。
請求項2に記載の発明は、走行車体1に除雪装置15を昇降自在に装着し、この除雪装置15を畝面Uまたは所定の水平基準Lに基づき自動昇降制御する請求項1に記載の雪下野菜収穫前処理方法とする。
【0008】
このように構成すると、除雪装置15は自動的に常時畝面Uから所定高さ位置で除雪作業を行うものとなり、走行車体1がピッチング状態となっても雪下にある野菜に干渉することなく該除雪作業を継続できる。
【0009】
請求項3に記載の発明は、走行車体1に除雪装置15を左右ローリング自在に装着し、この除雪装置15を自動水平制御する請求項1又は請求項2に記載の雪下野菜収穫前処理方法とする。このように構成すると、除雪装置15は走行車体1の左右ローリングに関わらず略水平状態に保持されるため、雪下野菜を干渉しないで除雪作業を行う。
【0010】
請求項4に記載の発明は、圃場の畝を跨ぐ左右の走行装置2L,2Rを備えた走行車体1の前部又は後部に昇降連動機構13を介して昇降調整自在に除雪装置15を装着してなる雪下野菜収穫前処理装置とする。該走行車体1を圃場に形成する畝に沿って走行させながらこの畝面U及び該畝面Uに生育する野菜に堆積する積雪を上記除雪装置15を昇降調整しながら生育野菜を残して除去する。
【0011】
請求項5に記載の発明は、所定水平基準Z又は畝面Uに対する除雪装置15の位置を検出する手段31を設け、前記昇降連動機構13により除雪装置15を予め設定した位置との比較に基づき昇降制御する構成とした請求項4に記載の雪下野菜収穫前処理装置とする。このように構成すると、検出手段31の検出結果に基づき除雪装置15は走行車体に対して昇降制御され該除雪装置15は自動的に常時畝面Uから所定高さ位置で除雪作業を行うものとなり、走行車体がピッチング状態となっても雪下にある野菜に干渉することなく該除雪作業を継続できる。
【0012】
請求項6に記載の発明は、走行車体1に対して除雪装置15を左右ローリング自在に装着すると共に除雪装置15と走行車体1との間にローリング連動機構18を設け、除雪装置15に左右傾斜検出手段33を備え、該左右傾斜検出手段33の検出結果に基づきローリング連動機構18を介して除雪装置15を自動水平制御する請求項4又は請求項5に記載の雪下野菜収穫前処理装置とする。このように構成すると、左右傾斜検出手段33の検出結果により除雪装置15は走行車体1に対して左右傾斜制御され該除雪装置15は自動的に水平状態とされてほぼ水平の畝面Uに生育する雪下野菜Vに対して干渉する恐れ少なく除雪作業を継続して行うことができる。
【発明の効果】
【0013】
請求項1又は請求項4に記載の発明によると、畝面に生育する雪下野菜の収穫作業の前に畝面及び野菜に堆積する積雪を除去することによって主として手作業に頼る収穫作業の際の除雪作業を無くしあるいは省力化し、該収穫作業の軽労化及び能率向上を図ることができる。
【0014】
請求項2及び請求項5に記載の発明によると、除雪装置は自動的に常時畝面から所定高さ位置で除雪作業を行うものとなり、走行車体がピッチング状態となっても雪下にある野菜に干渉することなく該除雪作業を継続できる。
【0015】
請求項3及び請求項6に記載の発明によると、除雪装置は走行車体の左右ローリングに関わらず略水平状態に保持されるため、雪下野菜を干渉しないで除雪作業を行うことができる。
【図面の簡単な説明】
【0016】
【図1】第1実施例の全体側面図である。
【図2】その平面図である。
【図3】その背面図である。
【図4】昇降制御の一例を示す概要側面図である。
【図5】制御ブロック図である。
【図6】隣接作業の概要を示す平面図である。
【図7】第2実施例の全体側面図である。
【図8】その平面図である。
【図9】その背面図である。
【図10】第3実施例の側面図である。
【図11】その平面図である。
【図12】その背面図である。
【図13】除雪装置の異なる例を示す平面図である。
【図14】更に他の除雪装置の例を示す平面図である。
【図15】その作用を示す平面図である。
【発明を実施するための形態】
【0017】
この発明の実施の態様を図面に基づき説明する。
走行車体1は左右のクローラ型走行装置2L,2Rによって支持され、フレーム3の前部に作業機装着用ヒッチ部材4を立設し、後部一側(図例では左側)にはエンジン5を搭載すると共にその直後に位置して操作部6を配設する。フレーム3の中間部上側はコンテナ状に保護枠で囲われた収納部7を構成する。
【0018】
前記左右のクローラ型走行装置2L,2Rは幅狭のクローラを装着すると共にフレーム3の地上高も大に設定している。このクローラ型走行装置2L,2Rの左右間隔を図外調整装置によって拡大又は縮小すべく構成している。このように構成することによって、圃場の畝を跨ぎ該畝間隔底部にクローラを走行させることによって畝に沿った走行を行うことができる。
【0019】
なお、操作部6には、前後進切替レバー8、左右のサイドクラッチ切替レバー9L,9R、昇降レバー10、デッドマンクラッチレバー11等を配設している。
前記作業機装着用ヒッチ部材4は、上下並行の2つの水平枠4a,4bを剛体枠組構成して走行車体1の前部フレーム3aに前後方向ピボット軸芯4P回りに回動自在に連結構成されている。上記水平枠4a,4bには左右に平行リンクブラケット12,12をフック部材12a,12bを介して装着し、中央には昇降連動機構としての昇降油圧シリンダ機構13のシリンダ13a装着用のブラケット4cを設ける。上記平行リンクブラケット12,12に一端を連結する左右の平行リンク14,14の他端を、作業機としての除雪装置15のフレーム部15aに装着し、昇降油圧シリンダ機構13のピストン部13bを平行リンク14,14の下部側リンク同士を連結する連結枠16に装着している。該油圧昇降シリンダ機構13の短縮によって除雪装置15を走行車体1に対して上昇し、逆に伸出によって除雪装置を下降すべく構成している。
【0020】
前記作業機装着用ヒッチ部材4の一側(図例では進行方向F左側)において、該ヒッチ部材4の下方側水平枠4bと走行車体1側の固定部材から延出するブラケット17との間に油圧伸縮自在なローリング連動機構としての油圧ローリングシリンダ機構18を設けている。該油圧ローリングシリンダ機構18の伸出作動によって除雪装置15は走行車体1に対し前記ピボット軸心4P回りに左側が上昇し、逆に短縮作動によって除雪装置15は左側が下降する相対関係に設けられる。
【0021】
除雪装置15は、公知の構成であり、横軸回りに回転するオーガ部材15a,15aとこのオーガ部材15a,15aの進行方向後方側を囲うカバー部材15bと、ブロワ15cと放出筒15d等からなる。このうちオーガ部材15a,15bは回転駆動される水平軸15e回りに螺旋状を巻回固定する構成であり、この螺旋状は右半部と左半部に分割され夫々左螺旋又は右螺旋に形成されて当該水平軸に固定されている。オーガ部材15a,15aが駆動されると接触する雪は螺旋状に従い中央側に寄せられ、ブロワ15cの回転に伴って合流した雪を上方の放出筒15dに送り込み該放出筒15dの先端から放出する構成である。
【0022】
除雪装置15の前記水平軸15eやブロア15cの駆動軸(図示せず)には後方に突出する作業機入力軸15fに走行車体1側の前記エンジン5の駆動出力に連動する伝動ケース20内伝動機構部を経て変速動力を出力する作業機出力軸21との間を自在継手軸22によって連動連結する。作業機入力軸15fの駆動力はブロア15c駆動の後、側部伝動機構15gを経て水平軸15eを駆動する構成である。
【0023】
前記走行車体1における伝動ケース20内には、走行装置としてのクローラ2L,2Rを駆動する走行伝動機構(図示せず)を具備しており、エンジン動力を入り切りできる主クラッチの他、有段又は無段の変速機構、前記サイドクラッチ切替レバー9L,9Rに連動する旋回用サイドクラッチ等を内装している。
【0024】
走行車体1のフレーム3は梯形に構成され、左右フレームと前後フレームと左右乃至前後を連結する中間フレーム等からなり、図例では収穫野菜を収容する前記コンテナ型収容部7を搭載する構成としている。
【0025】
除雪装置15の自動制御について説明する。図4に示すように、圃場の端部にレーザ光Zを水平状態に照射できるレーザ光照射装置30を設け、除雪装置15の側に、上下方向に所定の受信範囲を受信範囲に構成したレーザ検出手段31を備える。レーザ検出手段31による受信信号は制御部32に出力され、制御部32ではこの受信信号が予め設定してある除雪面Fに一致するか否かをレーザ光Zのラインから除雪面Fまでの垂直距離Lに置き換えて判断し、レーザ検出手段31による検出結果により除雪面Fまでの測定距離L´が基準の垂直距離Lよりも「小」と検出すると前記油圧昇降シリンダ機構13に伸出出力し除雪装置15を下降させる(下降出力)。逆に基準垂直距離Lよりも「大」と判断されるときは短縮出力して除雪装置15を上昇させる(上昇出力)。なお、ある基準垂直距離Lは、作業者の判定による。すなわち雪下野菜の生育状況を予め確認しておき、前記昇降レバー10で除雪装置15を昇降調整しておき、当該垂直距離Lを図外の設定スイッチ手段等によって設定する。したがって、積雪面Sに凹凸があって雪下野菜を視認できなくても除雪装置15によって除去すべき雪量(除去高さ)hは自動判定され、基準垂直距離Lに基づいて除雪作業を行うことができる。一般に農業用トラクタによる耕耘及び畝立て作業はトラクタの水平制御手段によるものであるから、畝面Uは水平面に形成される。このため、前記基準垂直距離Lの設定によって雪下野菜を傷めずに除雪作業を行うことができる。
【0026】
上記の実施例では昇降制御手段としてレーザ光Zによる制御としたが、簡易的には除雪装置15のフレーム部から接触型の接地センサを構成し、該センサを畝面Uに摺接させながら作業を行うことにより畝面Uから除雪面Fまでの高さ(除雪高さ)hを検出しこれを予め設定した除雪高さHと対比しながら昇降制御することができる。
【0027】
また、図2のように、前記作業機装着用ヒッチ部材4に左右傾斜角度検出手段33を設けている。この左右傾斜角度検出手段33による検出傾斜角度θは制御部32に入力され、水平状態からの角度偏差△θを算出して油圧ローリングシリンダ機構18に伸出出力又は短縮出力をして除雪装置15を略水平姿勢に維持すべく水平制御する構成である。
【0028】
上例の作用について、作業者は畝面の生育野菜、例えばほうれん草の成長を確認し、収穫時期に至ると、走行車体1を畝に沿って走行させて収穫前処理としての除雪作業と共に収穫作業を行う。生育野菜の生育と共に、堆積する雪の除去量(高さ)hを勘案し、除雪装置15の基準垂直距離Lを決定し、制御部32にセットする。なお、このセット設定については予め数値入力したり、選択スイッチ操作によるなど既知の構成によって行う。そして、昇降制御自動選択スイッチ34及び水平制御自動選択スイッチ35を共にONする。
【0029】
このようにして各部を駆動し、走行車体1を前進させると、クローラ走行装置2L,2Rは畝間溝部に位置して走行しながら、除雪装置15は畝上面所定高さHで除雪を行う。併せて除雪装置15は水平姿勢を維持して走行車体1の移動に連れて除雪作業を行う。作業者は、走行車体1を自走させながら、その直後において除雪前処理後の畝面Uに生育する雪下野菜V,V…を掘り起こしてコンテナ型収容部7に収容していく。
【0030】
除雪装置15の除雪幅Wは、一畝間を跨いだ畝面Uの幅S、左右のクローラ走行装置2L,2Rが通行する畝間幅2T、および隣接する畝の半分S/2をカバーできる幅(W=S+2T+S/2)に設定している。したがって、図6に示すように、容易に隣接作業を行うことができる。
【0031】
放出筒15dは基端部側に対して縦軸芯周りに回動自在に設けられ、その放出口は360度に向き変更自在に構成しておくことにより、雪の放出先を設定でき、当該雪下野菜収穫前処理の除雪作業においては、既に収穫した畝側に放出するとよい。
【0032】
図7〜図9に示す第2の例は、上記の例と異なり、1畝1条の生育野菜(図例ではキャベツ)の収穫に関する。この場合には走行車体1が跨ぐ畝面の雪下野菜に対する除雪を行うものである。この場合には圃場端部での旋回動作に所定の空間を要するが、1畝1条であるから走行車体1の操縦操作が負担とならない。なお、左右のクローラ走行装置2L,2R間隔を拡縮できる構成とし、畝の幅に見合うよう調整できる構成としておくことにより異なる畝幅に対応でき畝を崩さずに作業を行うことができる。また、2畝2条のように複数畝に対応させることができる。
【0033】
図7〜図9の構成では前記ローリング制御に関係する構成部材を省略して走行車体1と除雪装置15Aとが一体的の構成である。畝間溝部を安定的に走行できる圃場においてはこのローリング制御を省略でき、コストダウンにつながる。なお、符号は図1〜図3の第1の例と共通のものは同一符号としている。
【0034】
図10〜図12に示す構成は、トラクタ形態として走行車体を支持する前車輪40L,40R、および後車輪41L,41Rを全て同径に構成すると共に、走行車体1Bの後部に除雪装置15Bを装着する。すなわち、走行車体1Bの後部ブラケット42を昇降可能に構成し、この後部ブラケット42に作業機昇降用作業機ヒッチ4Bを設け、この作業機ヒッチ4Bに前記除雪装置15と同形態の除雪装置15Bを装着するが、後部ブラケット42の受け部42aに対して作業機ヒッチ4Bを左右に摺動自在に連結し、後部ブラケット42と作業機ヒッチ4Bとの間に設けた摺動シリンダ機構43の伸縮作動によって除雪装置15Bが走行車体1Bの後部に位置する状態と右側にオフセットする状態(図11中仮想線)に変更できるよう構成している。44はコンテナである。
【0035】
図10,図11に示すように、この実施例においては走行車体1Bをバック走行Rさせながら収穫作業を行う。乗員作業者は除雪装置15Bの上下高さを後部ブラケット42の設定高さによって設定し、摺動シリンダ機構43の伸縮によってオフセット量を設定する。これらの設定の後走行車体1Bをバック走行Rさせる。他の作業者は、圃場を歩行しながら除雪後の雪下野菜V,V…を収穫し、コンテナ44に収容する。走行車体1Bの移動と歩行作業者の作業速度とが合わないなどの事態が生じると、走行車体1Bの前側に設けた緊急クラッチレバー45を操作すると走行車体1Bは停止し、作業者の収穫作業速度との修正を行うことができる。
【0036】
なお、図10〜図12において、走行車体1Bは前部ボンネット46内のエンジン47、中間部にステアリングハンドル48及び搭乗者用シート49、後部に前記コンテナ44を載置するスペース50を有した構成としている。
【0037】
この第3の例における除雪装置15Bのカバー部材15bは、図10仮想線に示すように前後反転状態に交換でき、この状態のときは、走行車体1Bを前進Fさせながら、除雪を行うことができ、歩行作業者が除雪装置15Bの後部において収穫作業を行う。
【0038】
図13に示す例は、除雪装置15の代替構成を示す。図11における後部ブラケット42に水平姿勢でツールバー51を装着し、このツールバー51の一側端部に除雪プラウ52を装着する。除雪プラウ52は積雪部中に入り込んで進行しながら鋤き込んだ雪を反転移動させて近傍に盛り上げるものである。このように構成すると簡単な構成で、雪下野菜上方の雪を跳ね上げて別位置に排出できる。
【0039】
図14,15に示す例は、除雪装置の異なる例を示す。第1〜第3の例における除雪装置15や除雪装置15Bは異なる螺旋状からなるオーガ部材15a,15aの一対を一列に配設して除雪装置15,15A,15Bを構成するため、ブロア15cの位置及び放出筒15dの位置が中央になって、その分除去する雪の放出口からの飛散距離を大きくしなければならない。そこで、図14,図15に示すように除雪装置15Cにおいては、螺旋状53を同一形態として一側に除雪された雪を寄せる構成とし、この寄せられた雪をブロア54と放出筒55で放出するが、雪の放出先を左程に遠方へ投擲する必要がなくエネルギ消耗を来たさない。なお、この除雪装置15Cは一側の縦軸芯周りに回動自在に設けられ、該軸芯位置に配設した電動モータ56の正逆転連動によってその位置を走行車体1後部に位置にするか(図14)又は左右方向いずれかにオフセットした位置(図15)に組み替えできる。オーガ部材やブロアの駆動も電動モータ(図示せず)とすると構成を簡素にできる。符号57は昇降シリンダ機構である。
【符号の説明】
【0040】
1,1A,1B 走行車体
13 昇降連動機構(油圧昇降シリンダ機構)
15,15A,15B,15C 除雪装置
18 ローリング連動機構(ローリングシリンダ機構)
31 高さ検出手段(レーザ検出手段)
33 左右傾斜検出手段
L 基準垂直距離
h 除雪高さ
U 畝面
V 野菜
【特許請求の範囲】
【請求項1】
走行車体(1)に除雪装置(15)を装着し該走行車体(1)を圃場に形成する畝に沿って走行させながらこの畝面(U)及び該畝面(U)に生育する野菜(V,V…)に堆積する積雪を上記除雪装置(1)によって生育した野菜V,V…を残して除去する雪下野菜収穫前処理方法。
【請求項2】
走行車体(1)に除雪装置(15)を昇降自在に装着し、この除雪装置(15)を畝面(U)または所定の水平基準(L)に基づき自動昇降制御する請求項1に記載の雪下野菜収穫前処理方法。
【請求項3】
走行車体(1)に除雪装置(15)を左右ローリング自在に装着し、この除雪装置(15)を自動水平制御する請求項1又は請求項2に記載の雪下野菜収穫前処理方法。
【請求項4】
圃場の畝を跨ぐ左右の走行装置(2L,2R)を備えた走行車体(1)の前部又は後部に昇降連動機構(13)を介して昇降調整自在に除雪装置(15)を装着してなる雪下野菜収穫前処理装置。
【請求項5】
所定水平基準(Z)又は畝面(U)に対する除雪装置(15)の位置を検出する手段(31)を設け、前記昇降連動機構(13)により除雪装置(15)を予め設定した位置との比較に基づき昇降制御する構成とした請求項4に記載の雪下野菜収穫前処理装置。
【請求項6】
走行車体(1)に対して除雪装置(15)を左右ローリング自在に装着すると共に除雪装置(15)と走行車体(1)との間にローリング連動機構(18)を設け、除雪装置(15)に左右傾斜検出手段(33)を備え、該左右傾斜検出手段(33)の検出結果に基づきローリング連動機構(18)を介して除雪装置(15)を自動水平制御する請求項4又は請求項5に記載の雪下野菜収穫前処理装置。
【請求項1】
走行車体(1)に除雪装置(15)を装着し該走行車体(1)を圃場に形成する畝に沿って走行させながらこの畝面(U)及び該畝面(U)に生育する野菜(V,V…)に堆積する積雪を上記除雪装置(1)によって生育した野菜V,V…を残して除去する雪下野菜収穫前処理方法。
【請求項2】
走行車体(1)に除雪装置(15)を昇降自在に装着し、この除雪装置(15)を畝面(U)または所定の水平基準(L)に基づき自動昇降制御する請求項1に記載の雪下野菜収穫前処理方法。
【請求項3】
走行車体(1)に除雪装置(15)を左右ローリング自在に装着し、この除雪装置(15)を自動水平制御する請求項1又は請求項2に記載の雪下野菜収穫前処理方法。
【請求項4】
圃場の畝を跨ぐ左右の走行装置(2L,2R)を備えた走行車体(1)の前部又は後部に昇降連動機構(13)を介して昇降調整自在に除雪装置(15)を装着してなる雪下野菜収穫前処理装置。
【請求項5】
所定水平基準(Z)又は畝面(U)に対する除雪装置(15)の位置を検出する手段(31)を設け、前記昇降連動機構(13)により除雪装置(15)を予め設定した位置との比較に基づき昇降制御する構成とした請求項4に記載の雪下野菜収穫前処理装置。
【請求項6】
走行車体(1)に対して除雪装置(15)を左右ローリング自在に装着すると共に除雪装置(15)と走行車体(1)との間にローリング連動機構(18)を設け、除雪装置(15)に左右傾斜検出手段(33)を備え、該左右傾斜検出手段(33)の検出結果に基づきローリング連動機構(18)を介して除雪装置(15)を自動水平制御する請求項4又は請求項5に記載の雪下野菜収穫前処理装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2013−111023(P2013−111023A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−260608(P2011−260608)
【出願日】平成23年11月29日(2011.11.29)
【出願人】(000000125)井関農機株式会社 (3,813)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月29日(2011.11.29)
【出願人】(000000125)井関農機株式会社 (3,813)
【Fターム(参考)】
[ Back to top ]