
雷発生位置標定装置および雷発生地域推定方法
【課題】雷の発生位置を広範囲のエリアにわたって、精度良く測定または推定する。
【解決手段】雷発生位置測定システム1は、雷放射観測装置110と雷発生位置標定装置10とで構成される。複数の雷放射観測装置110は、雷の観測対象のエリアに配置され、雷の発生位置の方向を示す仰角および方位角の時系列、当該時系列の時刻、観測地点の位置情報、および送信元を識別する識別情報を含む観測データを雷発生位置標定装置10に送信する。雷発生位置標定装置10は、観測データを受信し、識別情報の異なる仰角の時系列の間で、当該仰角の時系列の時刻の間隔および仰角の値が類似するか否かを判定し、類似すると判定した2つ以上の前記識別情報の異なる観測データを用いて、雷の発生位置を標定する。
【解決手段】雷発生位置測定システム1は、雷放射観測装置110と雷発生位置標定装置10とで構成される。複数の雷放射観測装置110は、雷の観測対象のエリアに配置され、雷の発生位置の方向を示す仰角および方位角の時系列、当該時系列の時刻、観測地点の位置情報、および送信元を識別する識別情報を含む観測データを雷発生位置標定装置10に送信する。雷発生位置標定装置10は、観測データを受信し、識別情報の異なる仰角の時系列の間で、当該仰角の時系列の時刻の間隔および仰角の値が類似するか否かを判定し、類似すると判定した2つ以上の前記識別情報の異なる観測データを用いて、雷の発生位置を標定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、雷発生位置の標定と雷発生地域を推定する技術に関する。
【背景技術】
【0002】
雷雲内の電荷の分離が進んで、電界強度が大きくなると、絶縁体である大気中に絶縁破壊が起こり、雷放電が発生する。
【0003】
雷放電は、雷雲中の正の電荷と負の電荷との間、雷雲と他の雷雲との間、雷雲と大地との間など、いろいろな方向に生じる。つまり、雷放電は、下方向にだけでなく、横方向や、上方向にも生じている。特に、雷雲から大地へ向かう雷放電は、落雷と呼ばれる。雷雲内および雷雲間の放電の数は、落雷の数より多く、その比は約10対1という報告もある。落雷には、雷雲の負の電荷が大地に放電する負極性落雷と、雷雲の正電荷が大地に放電する正極性落雷とがある。
【0004】
日本の夏季では、負極性落雷の数が正極性落雷の数より多く、負の電荷の層は地上高7〜10km程度と言われている。
【0005】
非特許文献1によれば、落雷におけるリーダ(上記電荷の進展)は雷雲から地上までステップ状に進展(ステップドリーダ)し、そのワンステップの長さは10〜200m、速度は約105m/s、時間間隔は30〜125μsecと言われている。このリーダの進展には閃光と雷鳴が伴うことは経験的に知られている。これらの知見は非特許文献1に記載されている高速画像計測による落雷の観測的研究によって得られたと言われている。
【0006】
また、リーダの進展は大気空間中の電荷の移動であり、その進展に伴って電磁波が放射されることも知られている。
非特許文献2および特許文献1には、雷のリーダより放射される電磁波の、特にVHF(Very High Frequency)波帯のインパルス状の電磁波に着目し、複数に配置したアンテナより受信された個々の電磁波間の位相差より、その受信位置からみたリーダの位置に向かった方向ベクトル(方位角と仰角)を検出する技術を開示している。しかしながら、その受信位置から雷の位置、すなわちリーダが進展している位置までの距離は本計測手法では得られず、複数の観測地点から得られた各々の方位角および仰角、すなわち方向ベクトルの交点をもってその発生位置とする(この方法は交会法と呼ばれている)。
【0007】
落雷現象を地上からの画像計測によって光学的に観測する場合、雷雲と地上間の落雷を対象とする場合には良いが、雷雲間あるいは雷雲から上方に進展する雷は雷雲が影になってしまい、その画像あるいは映像を得ることは原理的に困難である。一方、非特許文献1および特許文献1に記載されている方法によれば、着目している周波数帯域の電磁波は雷雲間も透過するため雷雲の影になる雷雲間あるいは雷雲より上方へ進展する雷のリーダも地上から観測することができる。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2001−4731号公報
【非特許文献】
【0009】
【非特許文献1】日本大気電気学会編、 大気電気学概論、コロナ社 2003
【非特許文献2】Takeshi Morimoto, Akimasa Hirata, Zen Kawasaki, Tomoo Ushio, Akinori Matsumoto, Lee Jong Ho, “An Operational VHF Broadband Digital Interferometer for Lightning Monitoring”, IEEJ Trans. FM, Vol.124, No.12, 2004, pp.1232-1238
【発明の概要】
【発明が解決しようとする課題】
【0010】
しかしながら、いずれの先行技術も雷発生位置とその観測位置の距離が離れるとその観測が困難になる。落雷を光学的に観測する場合、通常は雷雨の存在により観測位置までの距離がのびるにつれその閃光が見えにくくなり正確に雷発生位置への方向ベクトルが得にくくなる。また、電磁波は大気中での減衰が周波数の高周波化にともない著しくなる。落雷リーダの強度にもよるが、そのVHF波帯域の電磁波の到達距離は最大で10km程度と考えられている。従って、画像や映像観測、VHF波帯域電磁波計測いずれの場合においても、数十km以上の広範囲にわたるエリアの雷発生位置を観測するためには何らかの手段が必要となる。
【0011】
そこで、本発明は、雷の活動状況、特にその発生位置を広範囲のエリアにわたって、精度良く測定または推定する技術を提供することを課題とする。
【課題を解決するための手段】
【0012】
前記課題を解決するために、雷の閃光、電磁波あるいはその他の雷の発生に伴う信号(例えば雷鳴等も含む)の発生位置を推定する本発明の雷発生位置測定システムは、複数の雷放射観測装置(上記雷の発生に伴う信号の物理量を受信し、その雷の発生位置への方向ベクトルを出力する計測装置)と少なくとも1つの雷発生位置標定装置とで構成する。雷放射観測装置は、雷の観測対象のエリアに複数配置され、雷から放射される信号を受信素子を介して受信して、受信地点からみた信号の到来方向を示す方位角および仰角、当信号を受信した時刻、受信地点の位置情報、および送信元を識別する識別情報を前記雷発生位置標定装置に送信する。また、前記雷発生位置標定装置は、前記雷放射観測装置から、前記仰角の時系列、前記方位角、前記時刻、前記識別情報、および前記位置情報を含む観測データを受信し、前記雷放射観測装置から受信した前記識別情報の異なる前記仰角の時系列の間で、当該仰角の時系列の時刻の間隔および仰角の値が類似するか否かを判定し、類似すると判定した複数の前記識別情報の異なる前記観測データ(受信時刻、方位角および仰角の時系列)を用いて、雷の発生位置を標定する。
【発明の効果】
【0013】
本発明によれば、雷の広範囲な観測対象エリアにおいて、雷の発生位置を精度良く標定または推定する技術を提供することができる。
【図面の簡単な説明】
【0014】
【図1】雷発生位置測定システムの構成例を示す図である。
【図2】雷発生位置標定装置の機能例を示す図である。
【図3】受信情報の一例を示す図である。
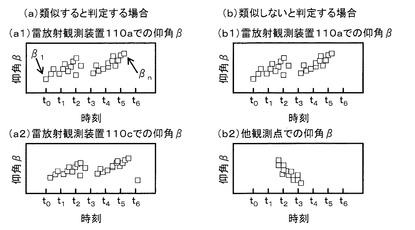
【図4】仰角の時系列の類似性を判定する例を示す図であり、(a)は類似すると判定する場合、(b)は類似しないと判定する場合を表す。
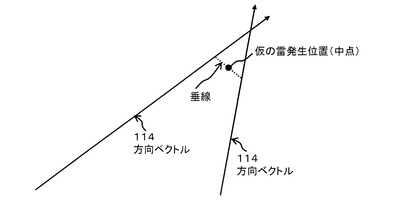
【図5】雷の発生位置を標定する処理の一例を示す図である。
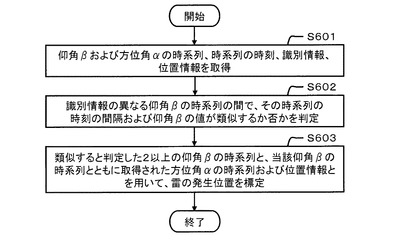
【図6】雷発生位置標定装置の処理フローの一例を示す図である。
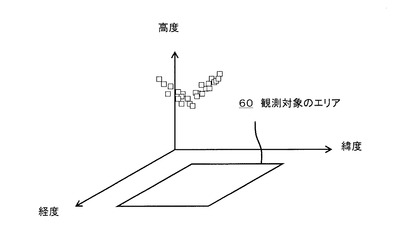
【図7】雷の発生位置の表示例を示す図である。
【図8】雷放射観測装置の配置の一例を示す図である。
【図9】変形例における受信情報の一例を示す図である。
【図10】変形例における雷発生位置標定装置の記憶部に記憶している装置位置情報の一例を示す図である。
【図11】変形例における雷発生位置標定装置の処理フローの一例を示す図である。
【発明を実施するための形態】
【0015】
次に、本発明を実施するための形態(以降、「本実施形態」と称す。)について、適宜図面を参照しながら詳細に説明する。
【0016】
(雷発生位置測定システムの構成)
本実施形態における雷発生位置測定システムの構成例について、図1を用いて説明する。
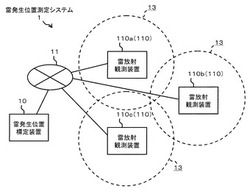
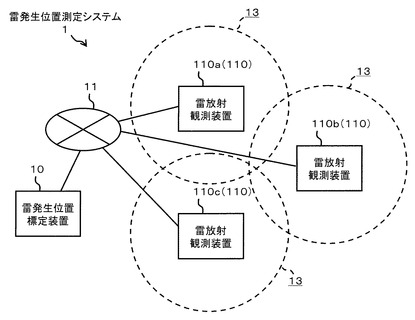
図1に示すように、本実施形態における雷発生位置測定システム1は、雷発生位置標定装置10と、雷発生位置標定装置10とネットワーク11を介して通信可能に接続される雷放射観測装置110(110a,110b,110c)とで構成される。
【0017】
雷放射観測装置110は、雷の観測対象のエリアに複数配置される。雷放射観測装置110は、360度方位カメラ等を用いた雷の閃光の画像や映像観測手段、無指向性マイク等を用いた雷鳴の検出手段、またはアンテナ等を用いた雷から放出される電磁波の受信手段等を備えることによって、観測地点からみた雷の発生位置への方向ベクトル(方位角αおよび仰角β)を求めることができる。そして、雷放射観測装置110は、方位角αおよび仰角βの時系列、その時系列の時刻、および観測地点の位置情報を関連付けて記録する。なお、雷放射観測装置110は、予めその設置位置が分かっている場合には位置情報を記憶しておく。または、雷放射観測装置110は、GPS(Global Positioning System)受信機(不図示)を備えて、位置情報を取得しても良い。また、雷放射観測装置110は、他の雷放射観測装置110と同期した時計を備えて時刻を取得する、または、GPS受信機を備えて同期した時刻を取得する。
【0018】
ネットワーク11は、通信方式を限定されることなく、有線であっても無線であっても構わない。雷発生位置標定装置10は、複数の雷放射観測装置110からネットワーク11を介して受信した雷発生位置の方向に関する情報を用いて、雷発生位置を標定する。なお、雷発生位置標定装置10の詳細については後記する。また、図1では、雷放射観測装置110は、3台記載しているが、3台に限られることなく、2台または4台以上であっても構わない。
【0019】
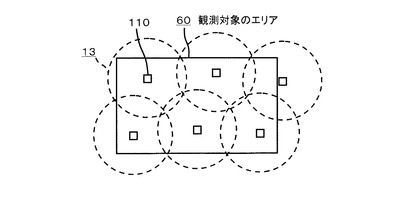
図1において、破線で示す円状の領域13は、その中心に設定される雷放射観測装置110を雷の観測対象のエリアに配置するときに、その円状の領域13が当該エリアをカバーするために用いられる。この円状の領域13の詳細については、後記する。
【0020】
(雷発生位置標定装置)
次に、雷発生位置標定装置10の機能例について、図2を用いて説明する。
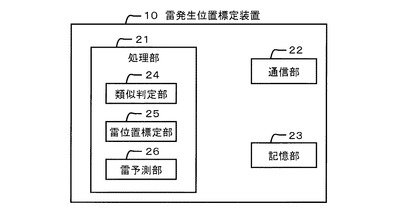
図2に示すように、雷発生位置標定装置10は、処理部21、通信部22、および記憶部23を備える。
【0021】
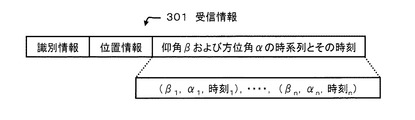
通信部22は、雷放射観測装置110から雷発生位置の方向に関する情報を受信し、受信した情報を処理部21へ引き渡す。なお、受信した情報は、少なくとも、図3の受信情報301に示すように、送信元の雷放射観測装置110を識別する識別情報、その雷放射観測装置110の設置されている位置情報(例えば、緯度経度等)、仰角βおよび方位角αの時系列、および当該時系列の時刻である。また、処理部21は、受信情報301を記憶部23へ記憶する。なお、例えば、ネットワーク11がIP(Internet Protocol)網の場合には、図3に示す識別情報は送信元のIPアドレスであっても良い。また、送信元のIPアドレスから雷放射観測装置110の位置が取得できる場合には、図3に示す位置情報は不要である。逆に、位置情報が識別情報の代わりになりうるものであれば、識別情報は不要である。
【0022】
図2へ戻り、処理部21は、図示しないCPU(Central Processing Unit)およびメインメモリによって構成され、記憶部23に記憶されているアプリケーションプログラムをメインメモリに展開して、後記する類似判定部24、雷位置標定部25、および雷予測部26を具現化する。
【0023】
類似判定部24は、識別情報の異なる仰角βの時系列の間で、当該仰角βの時系列の時刻の間隔および仰角βの値が類似するか否か、すなわち類似性を判定する。
例えば、図4は、方向ベクトルの仰角βを時系列に則って模式的にプロット(□印で表示)したものである。ここで、図4(a)は、仰角βの時系列が類似すると判定する場合を示している。すなわち、図4(a1)に示す雷放射観測装置110aでの仰角βの時系列は、時刻を所定の時間範囲内で若干ずらすと、図4(a2)に示す雷放射観測装置110cでの仰角βの時系列とほぼ一致し、仰角βの値の時系列の傾向(例えば、仰角βの値を時系列に沿って結んだ線の形状)も類似していることが分かる。
【0024】
なお、類似性の判定には、種々の統計処理を用いることが可能であり、特に限定されるものではないが、例えば、2つの仰角βの時系列について相関係数を求め、所定の値以上であるときに類似していると判定しても良い。なお、類似しているということは、図4(a1)および図4(a2)に示すプロット(図4中の□印)が、同じ雷から放射された信号を測定したこと、すなわち、雷発生位置が同じであることを意味している。ちなみに、図4(a2)の時刻t6付近のプロットに対応する測定点が、図4(a1)には存在していない。これは、雷発生位置が雷放射観測装置110cにやや近く、雷放射観測装置110aから遠くにあって、雷放射観測装置110aによって観測されなかったケースを表している。当該プロットは、統計処理を行う過程で外れ値として扱い、類似性の判定から除外することが可能である。
【0025】
また、図4(b)は、仰角βの時系列が類似しないと判定する場合を示している。すなわち、図4(b1)に示す雷放射観測装置110aでの仰角βの時系列の傾向(例えば、仰角βの値を時系列に沿って結んだ線の形状)は、時刻をずらしても、図4(b2)に示す他観測地点での仰角βの時系列の傾向と類似しているとは言えない。仮に、仰角βの値の時系列の傾向(例えば、仰角βの値を時系列に沿って結んだ線の形状)が一致していても、所定の時間範囲を超えて時刻がずれている場合には、別の雷と判定できる。
【0026】
図2に戻って、雷位置標定部25は、類似判定部24によって類似すると判定した識別情報の異なる2つ以上の仰角βの時系列と、当該仰角βの時系列とともに取得された方位角αの時系列および位置情報を用いて、雷発生位置を標定する。
雷発生位置を標定する際には、類似すると判定された複数の方向ベクトルの中から2組の方向ベクトルを抽出し、それらの距離(点線の長さ)が最小になるように演算し、その中点(仮の雷発生位置)を求める(図5参照)。さらに他の2組の方向ベクトルについてもそれらの距離(点線の長さ)が最小になるように演算し、中点を算出する。そして、算出した中点の位置(例えば、緯度経度)の平均値を算出することによって、当該平均値の位置を雷発生位置として決定することができる。
【0027】
この方法の特徴は、複数の方向ベクトルから一括して雷の発生位置を求めるのではなく、2組ずつ総当りで仮の雷発生位置を求めることで、極端に推定位置が異なる結果をもたらす方向ベクトルを統計処理を用いて外れ値として排除することができる点である。
このような外れ値となる方向ベクトルの判定方法として、例えば先に述べた2組の方向ベクトルから得られた最小距離を用いる方法がある。外れ値となる方向ベクトルが含まれた2組の方向ベクトルから得られる最小距離は、外れ値とならない2組の方向ベクトルから得られる最小距離に比較して、非常に大きな値になるため、外れ値となる方向ベクトルを容易に判定することができる。
【0028】
雷予測部26は、雲の動きを少なくとも含む気象情報データ(風速、風向、気温、気圧等)を外部のサーバ(不図示)等から取得して、雷位置標定部25によって標定した雷発生位置の移動を予測し、雷発生地域を推定する演算を実行する。
【0029】
記憶部23は、前記したアプリケーションプログラム、雷放射観測装置110から受信した情報(例えば、受信情報301)、および処理部21の処理結果等を記憶している。そして、記憶部23は、雷発生位置標定装置10に内蔵されていても、外付けされていても構わない。
【0030】
(雷発生位置標定装置の処理フロー例)
次に、雷発生位置標定装置10の処理フロー例について、図6を用いて説明する(適宜、図2参照)。
ステップS601では、処理部21の類似判定部24は、雷放射観測装置110から通信部22を介して受信した、仰角βおよび方位角αの時系列、その時系列の時刻、識別情報、および位置情報を観測データとして取得する。
【0031】
ステップS602では、処理部21の類似判定部24は、識別情報の異なる仰角βの時系列の間で、その時系列の時刻の間隔および仰角βの値が類似するか否かを判定する。
【0032】
ステップS603では、処理部21の雷位置標定部25は、類似判定部24によって類似すると判定した2つ以上の仰角βの時系列と、当該仰角βの時系列とともに取得された方位角αの時系列および位置情報とを用いて、雷発生位置を標定する。
【0033】
ここで、ステップS603によって標定された雷発生位置(□印)の時系列の一例を、雷の観測対象のエリア60とともに模式的に3次元表示すると、図7に示すようになる。図7にプロットした多数の雷発生位置は、図4(a1)のプロットを表したものである。なお、図7では、水平面の幅方向の軸は緯度、奥行き方向の軸は経度、高さ方向の軸は高度を表している。
【0034】
(雷放射観測装置の配置)
次に、雷放射観測装置110の配置について、図8を用いて説明する。
図8に示すように、雷の観測対象のエリア60が設定されたときに、破線で示す円状の領域13が、観測対象のエリア60をカバーするように配置される。ここで、カバーするとは、建造物や山等の陰やトンネル内等の例外的な場所もすべてをカバーするということではなく、観測対象としての範囲を含むようにするものである。なお、雷放射観測装置110は、円状の領域13の中心に設定される。
【0035】
なお、図8は、雷放射観測装置110を、地上(ビルの屋上を含む)の固定の観測地点に設置した場合を示している。さらに、雷放射観測装置110は、GPS受信機116を備えている場合には位置情報を随時取得できるので、車両や飛行機や船等の移動体に搭載されても構わない。移動体に雷放射観測装置110を搭載する場合には、雷放射観測装置110は、移動体の進行方向に応じて方位角αを補正し、高度に応じて仰角βを地上の数値に補正して、雷発生位置標定装置10に送信する。
なお、前記したように、大多数の雷放電は、雷雲内および雷雲間で発生しており、特に、飛行機に雷放射観測装置110を搭載して雷から放射される電磁波を測定することは、雷発生位置を標定する際の精度向上のために、有効である。また、海上であれば、船に雷放射観測装置110を搭載して雷から放射される電磁波を測定することは、陸に近づいてくる雷雲の移動を的確に測定できるので、雷発生地域を推定する際の精度向上のために、有効である。
【0036】
(変形例)
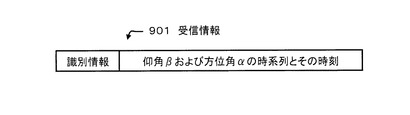
前記した実施形態では、雷発生位置標定装置10が、位置情報を雷放射観測装置110から取得する場合について説明したが、雷放射観測装置110が地上の固定の観測地点に設置されている場合には、位置情報を受信しなくても構わない。以下に、変形例として、雷発生位置標定装置10が、図9に示すように、受信情報901として、識別情報、仰角βおよび方位角αの時系列、および当該時系列の時刻を雷放射観測装置110から受信する場合について、前記した実施形態と異なる点に焦点を当てて説明する(適宜、図1,2参照)。なお、変形例における雷発生位置測定システムおよび雷発生位置標定装置は、前記した雷発生位置測定システム1および雷発生位置標定装置10と同様の構成であるため、同じ符号を用い、それらの図示は省略する。
【0037】
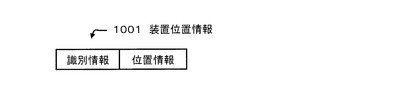
雷放射観測装置110が地上の固定の観測地点に設置されている場合には、雷放射観測装置110の位置情報が予め既知となっている。すなわち、雷発生位置標定装置10の記憶部23は、受信情報901と、識別情報と位置情報とを関連付けた装置位置情報1001(図10参照)とを記憶している。
【0038】
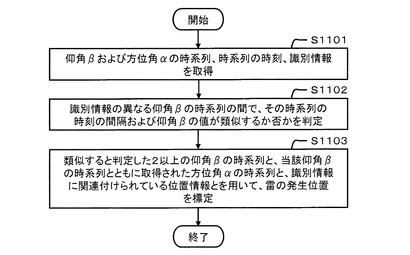
そして、雷発生位置標定装置10における処理フローは、図11に示すようになる。
ステップS1101では、処理部21の類似判定部24は、通信部22を介して雷放射観測装置110から受信した、仰角βおよび方位角αの時系列、時系列の時刻、および識別情報を観測データとして取得する。
【0039】
ステップS1102では、処理部21の類似判定部24は、識別情報の異なる仰角βの時系列の間で、その時系列の時刻の間隔および仰角βの値が類似するか否かを判定する。
【0040】
ステップS1103では、処理部21の雷位置標定部25は、装置位置情報1001を参照して、類似判定部24によって類似すると判定した2つ以上の仰角βの時系列の識別情報に関連付けられている位置情報を求めるとともに、類似すると判定した2つ以上の仰角βの時系列と、当該仰角βの時系列とともに取得された方位角αの時系列と、識別情報に関連付けられている位置情報とを用いて、雷発生位置を標定する。
【0041】
以上、本実施形態および変形例における雷発生位置測定システム1は、各観測地点(雷放射観測装置110を設定している地点)において測定した仰角βの時系列の間で類似性を判定し、類似すると判定した仰角β、方位角αの時系列、および位置情報を用いることによって、雷発生位置を精度良く標定することができる。また、雷放射観測装置110を、所定の半径を有する円状の領域13の中心に設定し、その円状の領域13が観測対象のエリア60をカバーするように配置する。このことは、雷雲内および雷雲間の雷放電については、雷発生位置を標定する際の精度向上のために有効である。また、雷放射観測装置110を移動体に搭載することによって、観測対象のエリア60における雷発生位置の推定や雷雲の移動予測の精度向上を図ることができる。
【0042】
なお、雷発生位置標定装置10は、本実施形態に記載した雷発生位置標定装置10の機能と、変形例に記載した雷発生位置標定装置10の機能とを統合して、移動体の観測地点から位置情報を受信する場合および固定の観測地点から位置情報を受信しない場合の双方に対応可能な構成としても構わない。
【符号の説明】
【0043】
1 雷発生位置測定システム
10 雷発生位置標定装置
13 円状の領域
21 処理部
22 通信部
23 記憶部
24 類似判定部
25 雷位置標定部
26 雷予測部
60 観測対象のエリア
110 雷放射観測装置
β 仰角
α 方位角
【技術分野】
【0001】
本発明は、雷発生位置の標定と雷発生地域を推定する技術に関する。
【背景技術】
【0002】
雷雲内の電荷の分離が進んで、電界強度が大きくなると、絶縁体である大気中に絶縁破壊が起こり、雷放電が発生する。
【0003】
雷放電は、雷雲中の正の電荷と負の電荷との間、雷雲と他の雷雲との間、雷雲と大地との間など、いろいろな方向に生じる。つまり、雷放電は、下方向にだけでなく、横方向や、上方向にも生じている。特に、雷雲から大地へ向かう雷放電は、落雷と呼ばれる。雷雲内および雷雲間の放電の数は、落雷の数より多く、その比は約10対1という報告もある。落雷には、雷雲の負の電荷が大地に放電する負極性落雷と、雷雲の正電荷が大地に放電する正極性落雷とがある。
【0004】
日本の夏季では、負極性落雷の数が正極性落雷の数より多く、負の電荷の層は地上高7〜10km程度と言われている。
【0005】
非特許文献1によれば、落雷におけるリーダ(上記電荷の進展)は雷雲から地上までステップ状に進展(ステップドリーダ)し、そのワンステップの長さは10〜200m、速度は約105m/s、時間間隔は30〜125μsecと言われている。このリーダの進展には閃光と雷鳴が伴うことは経験的に知られている。これらの知見は非特許文献1に記載されている高速画像計測による落雷の観測的研究によって得られたと言われている。
【0006】
また、リーダの進展は大気空間中の電荷の移動であり、その進展に伴って電磁波が放射されることも知られている。
非特許文献2および特許文献1には、雷のリーダより放射される電磁波の、特にVHF(Very High Frequency)波帯のインパルス状の電磁波に着目し、複数に配置したアンテナより受信された個々の電磁波間の位相差より、その受信位置からみたリーダの位置に向かった方向ベクトル(方位角と仰角)を検出する技術を開示している。しかしながら、その受信位置から雷の位置、すなわちリーダが進展している位置までの距離は本計測手法では得られず、複数の観測地点から得られた各々の方位角および仰角、すなわち方向ベクトルの交点をもってその発生位置とする(この方法は交会法と呼ばれている)。
【0007】
落雷現象を地上からの画像計測によって光学的に観測する場合、雷雲と地上間の落雷を対象とする場合には良いが、雷雲間あるいは雷雲から上方に進展する雷は雷雲が影になってしまい、その画像あるいは映像を得ることは原理的に困難である。一方、非特許文献1および特許文献1に記載されている方法によれば、着目している周波数帯域の電磁波は雷雲間も透過するため雷雲の影になる雷雲間あるいは雷雲より上方へ進展する雷のリーダも地上から観測することができる。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2001−4731号公報
【非特許文献】
【0009】
【非特許文献1】日本大気電気学会編、 大気電気学概論、コロナ社 2003
【非特許文献2】Takeshi Morimoto, Akimasa Hirata, Zen Kawasaki, Tomoo Ushio, Akinori Matsumoto, Lee Jong Ho, “An Operational VHF Broadband Digital Interferometer for Lightning Monitoring”, IEEJ Trans. FM, Vol.124, No.12, 2004, pp.1232-1238
【発明の概要】
【発明が解決しようとする課題】
【0010】
しかしながら、いずれの先行技術も雷発生位置とその観測位置の距離が離れるとその観測が困難になる。落雷を光学的に観測する場合、通常は雷雨の存在により観測位置までの距離がのびるにつれその閃光が見えにくくなり正確に雷発生位置への方向ベクトルが得にくくなる。また、電磁波は大気中での減衰が周波数の高周波化にともない著しくなる。落雷リーダの強度にもよるが、そのVHF波帯域の電磁波の到達距離は最大で10km程度と考えられている。従って、画像や映像観測、VHF波帯域電磁波計測いずれの場合においても、数十km以上の広範囲にわたるエリアの雷発生位置を観測するためには何らかの手段が必要となる。
【0011】
そこで、本発明は、雷の活動状況、特にその発生位置を広範囲のエリアにわたって、精度良く測定または推定する技術を提供することを課題とする。
【課題を解決するための手段】
【0012】
前記課題を解決するために、雷の閃光、電磁波あるいはその他の雷の発生に伴う信号(例えば雷鳴等も含む)の発生位置を推定する本発明の雷発生位置測定システムは、複数の雷放射観測装置(上記雷の発生に伴う信号の物理量を受信し、その雷の発生位置への方向ベクトルを出力する計測装置)と少なくとも1つの雷発生位置標定装置とで構成する。雷放射観測装置は、雷の観測対象のエリアに複数配置され、雷から放射される信号を受信素子を介して受信して、受信地点からみた信号の到来方向を示す方位角および仰角、当信号を受信した時刻、受信地点の位置情報、および送信元を識別する識別情報を前記雷発生位置標定装置に送信する。また、前記雷発生位置標定装置は、前記雷放射観測装置から、前記仰角の時系列、前記方位角、前記時刻、前記識別情報、および前記位置情報を含む観測データを受信し、前記雷放射観測装置から受信した前記識別情報の異なる前記仰角の時系列の間で、当該仰角の時系列の時刻の間隔および仰角の値が類似するか否かを判定し、類似すると判定した複数の前記識別情報の異なる前記観測データ(受信時刻、方位角および仰角の時系列)を用いて、雷の発生位置を標定する。
【発明の効果】
【0013】
本発明によれば、雷の広範囲な観測対象エリアにおいて、雷の発生位置を精度良く標定または推定する技術を提供することができる。
【図面の簡単な説明】
【0014】
【図1】雷発生位置測定システムの構成例を示す図である。
【図2】雷発生位置標定装置の機能例を示す図である。
【図3】受信情報の一例を示す図である。
【図4】仰角の時系列の類似性を判定する例を示す図であり、(a)は類似すると判定する場合、(b)は類似しないと判定する場合を表す。
【図5】雷の発生位置を標定する処理の一例を示す図である。
【図6】雷発生位置標定装置の処理フローの一例を示す図である。
【図7】雷の発生位置の表示例を示す図である。
【図8】雷放射観測装置の配置の一例を示す図である。
【図9】変形例における受信情報の一例を示す図である。
【図10】変形例における雷発生位置標定装置の記憶部に記憶している装置位置情報の一例を示す図である。
【図11】変形例における雷発生位置標定装置の処理フローの一例を示す図である。
【発明を実施するための形態】
【0015】
次に、本発明を実施するための形態(以降、「本実施形態」と称す。)について、適宜図面を参照しながら詳細に説明する。
【0016】
(雷発生位置測定システムの構成)
本実施形態における雷発生位置測定システムの構成例について、図1を用いて説明する。
図1に示すように、本実施形態における雷発生位置測定システム1は、雷発生位置標定装置10と、雷発生位置標定装置10とネットワーク11を介して通信可能に接続される雷放射観測装置110(110a,110b,110c)とで構成される。
【0017】
雷放射観測装置110は、雷の観測対象のエリアに複数配置される。雷放射観測装置110は、360度方位カメラ等を用いた雷の閃光の画像や映像観測手段、無指向性マイク等を用いた雷鳴の検出手段、またはアンテナ等を用いた雷から放出される電磁波の受信手段等を備えることによって、観測地点からみた雷の発生位置への方向ベクトル(方位角αおよび仰角β)を求めることができる。そして、雷放射観測装置110は、方位角αおよび仰角βの時系列、その時系列の時刻、および観測地点の位置情報を関連付けて記録する。なお、雷放射観測装置110は、予めその設置位置が分かっている場合には位置情報を記憶しておく。または、雷放射観測装置110は、GPS(Global Positioning System)受信機(不図示)を備えて、位置情報を取得しても良い。また、雷放射観測装置110は、他の雷放射観測装置110と同期した時計を備えて時刻を取得する、または、GPS受信機を備えて同期した時刻を取得する。
【0018】
ネットワーク11は、通信方式を限定されることなく、有線であっても無線であっても構わない。雷発生位置標定装置10は、複数の雷放射観測装置110からネットワーク11を介して受信した雷発生位置の方向に関する情報を用いて、雷発生位置を標定する。なお、雷発生位置標定装置10の詳細については後記する。また、図1では、雷放射観測装置110は、3台記載しているが、3台に限られることなく、2台または4台以上であっても構わない。
【0019】
図1において、破線で示す円状の領域13は、その中心に設定される雷放射観測装置110を雷の観測対象のエリアに配置するときに、その円状の領域13が当該エリアをカバーするために用いられる。この円状の領域13の詳細については、後記する。
【0020】
(雷発生位置標定装置)
次に、雷発生位置標定装置10の機能例について、図2を用いて説明する。
図2に示すように、雷発生位置標定装置10は、処理部21、通信部22、および記憶部23を備える。
【0021】
通信部22は、雷放射観測装置110から雷発生位置の方向に関する情報を受信し、受信した情報を処理部21へ引き渡す。なお、受信した情報は、少なくとも、図3の受信情報301に示すように、送信元の雷放射観測装置110を識別する識別情報、その雷放射観測装置110の設置されている位置情報(例えば、緯度経度等)、仰角βおよび方位角αの時系列、および当該時系列の時刻である。また、処理部21は、受信情報301を記憶部23へ記憶する。なお、例えば、ネットワーク11がIP(Internet Protocol)網の場合には、図3に示す識別情報は送信元のIPアドレスであっても良い。また、送信元のIPアドレスから雷放射観測装置110の位置が取得できる場合には、図3に示す位置情報は不要である。逆に、位置情報が識別情報の代わりになりうるものであれば、識別情報は不要である。
【0022】
図2へ戻り、処理部21は、図示しないCPU(Central Processing Unit)およびメインメモリによって構成され、記憶部23に記憶されているアプリケーションプログラムをメインメモリに展開して、後記する類似判定部24、雷位置標定部25、および雷予測部26を具現化する。
【0023】
類似判定部24は、識別情報の異なる仰角βの時系列の間で、当該仰角βの時系列の時刻の間隔および仰角βの値が類似するか否か、すなわち類似性を判定する。
例えば、図4は、方向ベクトルの仰角βを時系列に則って模式的にプロット(□印で表示)したものである。ここで、図4(a)は、仰角βの時系列が類似すると判定する場合を示している。すなわち、図4(a1)に示す雷放射観測装置110aでの仰角βの時系列は、時刻を所定の時間範囲内で若干ずらすと、図4(a2)に示す雷放射観測装置110cでの仰角βの時系列とほぼ一致し、仰角βの値の時系列の傾向(例えば、仰角βの値を時系列に沿って結んだ線の形状)も類似していることが分かる。
【0024】
なお、類似性の判定には、種々の統計処理を用いることが可能であり、特に限定されるものではないが、例えば、2つの仰角βの時系列について相関係数を求め、所定の値以上であるときに類似していると判定しても良い。なお、類似しているということは、図4(a1)および図4(a2)に示すプロット(図4中の□印)が、同じ雷から放射された信号を測定したこと、すなわち、雷発生位置が同じであることを意味している。ちなみに、図4(a2)の時刻t6付近のプロットに対応する測定点が、図4(a1)には存在していない。これは、雷発生位置が雷放射観測装置110cにやや近く、雷放射観測装置110aから遠くにあって、雷放射観測装置110aによって観測されなかったケースを表している。当該プロットは、統計処理を行う過程で外れ値として扱い、類似性の判定から除外することが可能である。
【0025】
また、図4(b)は、仰角βの時系列が類似しないと判定する場合を示している。すなわち、図4(b1)に示す雷放射観測装置110aでの仰角βの時系列の傾向(例えば、仰角βの値を時系列に沿って結んだ線の形状)は、時刻をずらしても、図4(b2)に示す他観測地点での仰角βの時系列の傾向と類似しているとは言えない。仮に、仰角βの値の時系列の傾向(例えば、仰角βの値を時系列に沿って結んだ線の形状)が一致していても、所定の時間範囲を超えて時刻がずれている場合には、別の雷と判定できる。
【0026】
図2に戻って、雷位置標定部25は、類似判定部24によって類似すると判定した識別情報の異なる2つ以上の仰角βの時系列と、当該仰角βの時系列とともに取得された方位角αの時系列および位置情報を用いて、雷発生位置を標定する。
雷発生位置を標定する際には、類似すると判定された複数の方向ベクトルの中から2組の方向ベクトルを抽出し、それらの距離(点線の長さ)が最小になるように演算し、その中点(仮の雷発生位置)を求める(図5参照)。さらに他の2組の方向ベクトルについてもそれらの距離(点線の長さ)が最小になるように演算し、中点を算出する。そして、算出した中点の位置(例えば、緯度経度)の平均値を算出することによって、当該平均値の位置を雷発生位置として決定することができる。
【0027】
この方法の特徴は、複数の方向ベクトルから一括して雷の発生位置を求めるのではなく、2組ずつ総当りで仮の雷発生位置を求めることで、極端に推定位置が異なる結果をもたらす方向ベクトルを統計処理を用いて外れ値として排除することができる点である。
このような外れ値となる方向ベクトルの判定方法として、例えば先に述べた2組の方向ベクトルから得られた最小距離を用いる方法がある。外れ値となる方向ベクトルが含まれた2組の方向ベクトルから得られる最小距離は、外れ値とならない2組の方向ベクトルから得られる最小距離に比較して、非常に大きな値になるため、外れ値となる方向ベクトルを容易に判定することができる。
【0028】
雷予測部26は、雲の動きを少なくとも含む気象情報データ(風速、風向、気温、気圧等)を外部のサーバ(不図示)等から取得して、雷位置標定部25によって標定した雷発生位置の移動を予測し、雷発生地域を推定する演算を実行する。
【0029】
記憶部23は、前記したアプリケーションプログラム、雷放射観測装置110から受信した情報(例えば、受信情報301)、および処理部21の処理結果等を記憶している。そして、記憶部23は、雷発生位置標定装置10に内蔵されていても、外付けされていても構わない。
【0030】
(雷発生位置標定装置の処理フロー例)
次に、雷発生位置標定装置10の処理フロー例について、図6を用いて説明する(適宜、図2参照)。
ステップS601では、処理部21の類似判定部24は、雷放射観測装置110から通信部22を介して受信した、仰角βおよび方位角αの時系列、その時系列の時刻、識別情報、および位置情報を観測データとして取得する。
【0031】
ステップS602では、処理部21の類似判定部24は、識別情報の異なる仰角βの時系列の間で、その時系列の時刻の間隔および仰角βの値が類似するか否かを判定する。
【0032】
ステップS603では、処理部21の雷位置標定部25は、類似判定部24によって類似すると判定した2つ以上の仰角βの時系列と、当該仰角βの時系列とともに取得された方位角αの時系列および位置情報とを用いて、雷発生位置を標定する。
【0033】
ここで、ステップS603によって標定された雷発生位置(□印)の時系列の一例を、雷の観測対象のエリア60とともに模式的に3次元表示すると、図7に示すようになる。図7にプロットした多数の雷発生位置は、図4(a1)のプロットを表したものである。なお、図7では、水平面の幅方向の軸は緯度、奥行き方向の軸は経度、高さ方向の軸は高度を表している。
【0034】
(雷放射観測装置の配置)
次に、雷放射観測装置110の配置について、図8を用いて説明する。
図8に示すように、雷の観測対象のエリア60が設定されたときに、破線で示す円状の領域13が、観測対象のエリア60をカバーするように配置される。ここで、カバーするとは、建造物や山等の陰やトンネル内等の例外的な場所もすべてをカバーするということではなく、観測対象としての範囲を含むようにするものである。なお、雷放射観測装置110は、円状の領域13の中心に設定される。
【0035】
なお、図8は、雷放射観測装置110を、地上(ビルの屋上を含む)の固定の観測地点に設置した場合を示している。さらに、雷放射観測装置110は、GPS受信機116を備えている場合には位置情報を随時取得できるので、車両や飛行機や船等の移動体に搭載されても構わない。移動体に雷放射観測装置110を搭載する場合には、雷放射観測装置110は、移動体の進行方向に応じて方位角αを補正し、高度に応じて仰角βを地上の数値に補正して、雷発生位置標定装置10に送信する。
なお、前記したように、大多数の雷放電は、雷雲内および雷雲間で発生しており、特に、飛行機に雷放射観測装置110を搭載して雷から放射される電磁波を測定することは、雷発生位置を標定する際の精度向上のために、有効である。また、海上であれば、船に雷放射観測装置110を搭載して雷から放射される電磁波を測定することは、陸に近づいてくる雷雲の移動を的確に測定できるので、雷発生地域を推定する際の精度向上のために、有効である。
【0036】
(変形例)
前記した実施形態では、雷発生位置標定装置10が、位置情報を雷放射観測装置110から取得する場合について説明したが、雷放射観測装置110が地上の固定の観測地点に設置されている場合には、位置情報を受信しなくても構わない。以下に、変形例として、雷発生位置標定装置10が、図9に示すように、受信情報901として、識別情報、仰角βおよび方位角αの時系列、および当該時系列の時刻を雷放射観測装置110から受信する場合について、前記した実施形態と異なる点に焦点を当てて説明する(適宜、図1,2参照)。なお、変形例における雷発生位置測定システムおよび雷発生位置標定装置は、前記した雷発生位置測定システム1および雷発生位置標定装置10と同様の構成であるため、同じ符号を用い、それらの図示は省略する。
【0037】
雷放射観測装置110が地上の固定の観測地点に設置されている場合には、雷放射観測装置110の位置情報が予め既知となっている。すなわち、雷発生位置標定装置10の記憶部23は、受信情報901と、識別情報と位置情報とを関連付けた装置位置情報1001(図10参照)とを記憶している。
【0038】
そして、雷発生位置標定装置10における処理フローは、図11に示すようになる。
ステップS1101では、処理部21の類似判定部24は、通信部22を介して雷放射観測装置110から受信した、仰角βおよび方位角αの時系列、時系列の時刻、および識別情報を観測データとして取得する。
【0039】
ステップS1102では、処理部21の類似判定部24は、識別情報の異なる仰角βの時系列の間で、その時系列の時刻の間隔および仰角βの値が類似するか否かを判定する。
【0040】
ステップS1103では、処理部21の雷位置標定部25は、装置位置情報1001を参照して、類似判定部24によって類似すると判定した2つ以上の仰角βの時系列の識別情報に関連付けられている位置情報を求めるとともに、類似すると判定した2つ以上の仰角βの時系列と、当該仰角βの時系列とともに取得された方位角αの時系列と、識別情報に関連付けられている位置情報とを用いて、雷発生位置を標定する。
【0041】
以上、本実施形態および変形例における雷発生位置測定システム1は、各観測地点(雷放射観測装置110を設定している地点)において測定した仰角βの時系列の間で類似性を判定し、類似すると判定した仰角β、方位角αの時系列、および位置情報を用いることによって、雷発生位置を精度良く標定することができる。また、雷放射観測装置110を、所定の半径を有する円状の領域13の中心に設定し、その円状の領域13が観測対象のエリア60をカバーするように配置する。このことは、雷雲内および雷雲間の雷放電については、雷発生位置を標定する際の精度向上のために有効である。また、雷放射観測装置110を移動体に搭載することによって、観測対象のエリア60における雷発生位置の推定や雷雲の移動予測の精度向上を図ることができる。
【0042】
なお、雷発生位置標定装置10は、本実施形態に記載した雷発生位置標定装置10の機能と、変形例に記載した雷発生位置標定装置10の機能とを統合して、移動体の観測地点から位置情報を受信する場合および固定の観測地点から位置情報を受信しない場合の双方に対応可能な構成としても構わない。
【符号の説明】
【0043】
1 雷発生位置測定システム
10 雷発生位置標定装置
13 円状の領域
21 処理部
22 通信部
23 記憶部
24 類似判定部
25 雷位置標定部
26 雷予測部
60 観測対象のエリア
110 雷放射観測装置
β 仰角
α 方位角
【特許請求の範囲】
【請求項1】
雷の観測地点からみた雷から放射される信号の到来方向を示す仰角および方位角、当該信号を受信した時刻、前記観測地点の位置情報、および送信元を識別する識別情報を送信する複数の雷放射観測装置とネットワークを介して通信可能に接続される雷発生位置標定装置であって、
前記雷放射観測装置から、前記仰角の時系列、前記方位角、前記時刻、前記識別情報、および前記位置情報を含む観測データを受信する通信部と、
前記雷放射観測装置から受信した前記識別情報の異なる前記仰角の時系列の間で、当該仰角の時系列の時刻の間隔および仰角の値が類似するか否かを判定する類似判定部と、
前記類似判定部によって類似すると判定した複数の前記識別情報の異なる前記観測データを用いて、前記雷の発生位置を標定する雷位置標定部と
を備えることを特徴とする雷発生位置標定装置。
【請求項2】
前記雷位置標定部は、
前記類似判定部によって類似すると判定された複数の前記識別情報の異なる前記観測データにおいて、類似すると判定された前記仰角と前記方位角とで構成される方向ベクトルの中から2組の方向ベクトルを選択しては、それらの距離が最小になるときの中点を求め、算出した前記中点の位置の平均値を算出し、当該平均値の位置を前記雷の発生位置として標定する
ことを特徴とする請求項1に記載の雷発生位置標定装置。
【請求項3】
前記雷発生位置標定装置は、
雲の動きを少なくとも含む気象情報データに基づいて、前記雷位置標定部によって標定した前記雷の発生位置の移動を予測し、雷発生地域を推定する雷予測部
を備えることを特徴とする請求項1または請求項2に記載の雷発生位置標定装置。
【請求項4】
前記雷放射観測装置は、
所定の半径を有する円状の領域の中心に設置され、前記円状の領域が、前記雷の発生位置の観測対象のエリアを含むように配置している
ことを特徴とする請求項1ないし請求項3のいずれか一項に記載の雷発生位置標定装置。
【請求項5】
雷の観測地点からみた雷から放射される信号の到来方向を示す仰角および方位角、当該信号を受信した時刻、GPS(Global Positioning System)受信機から取得した前記観測地点の位置情報、および送信元を識別する識別情報を雷発生位置標定装置に送信し、移動体に搭載された雷放射観測装置と、ネットワークを介して通信可能に接続される前記雷発生位置標定装置であって、
前記雷放射観測装置から、前記仰角の時系列、前記方位角、前記時刻、前記識別情報、および前記位置情報を含む観測データを受信する通信部と、
前記雷放射観測装置から受信した前記識別情報の異なる前記仰角の時系列の間で、当該仰角の時系列の時刻の間隔および仰角の値が類似するか否かを判定する類似判定部と、
前記類似判定部によって類似すると判定した複数の前記識別情報の異なる前記観測データを用いて、前記雷の発生位置を標定する雷位置標定部と
を備えることを特徴とする雷発生位置標定装置。
【請求項6】
雷の観測地点からみた雷から放射される信号の到来方向を示す仰角および方位角、当該信号を受信した時刻、前記観測地点の位置情報、および送信元を識別する識別情報を送信する複数の雷放射観測装置とネットワークを介して通信可能に接続される雷発生位置標定装置で用いられる雷発生地域推定方法あって、
前記雷発生位置標定装置は、
前記雷放射観測装置から、前記仰角の時系列、前記方位角、前記時刻、前記識別情報、および前記位置情報を含む観測データを受信するステップと、
前記雷放射観測装置から受信した前記識別情報の異なる前記仰角の時系列の間で、当該仰角の時系列の時刻の間隔および仰角の値が類似するか否かを判定する類似判定ステップと、
前記類似判定ステップによって類似すると判定した複数の前記識別情報の異なる前記観測データを用いて、前記雷の発生位置を標定する雷位置標定ステップと
雲の動きを少なくとも含む気象情報データに基づいて、前記雷位置標定ステップによって標定した雷の発生位置の移動を予測し、雷発生地域を推定する雷予測ステップと
を実行することを特徴とする雷発生地域推定方法。
【請求項1】
雷の観測地点からみた雷から放射される信号の到来方向を示す仰角および方位角、当該信号を受信した時刻、前記観測地点の位置情報、および送信元を識別する識別情報を送信する複数の雷放射観測装置とネットワークを介して通信可能に接続される雷発生位置標定装置であって、
前記雷放射観測装置から、前記仰角の時系列、前記方位角、前記時刻、前記識別情報、および前記位置情報を含む観測データを受信する通信部と、
前記雷放射観測装置から受信した前記識別情報の異なる前記仰角の時系列の間で、当該仰角の時系列の時刻の間隔および仰角の値が類似するか否かを判定する類似判定部と、
前記類似判定部によって類似すると判定した複数の前記識別情報の異なる前記観測データを用いて、前記雷の発生位置を標定する雷位置標定部と
を備えることを特徴とする雷発生位置標定装置。
【請求項2】
前記雷位置標定部は、
前記類似判定部によって類似すると判定された複数の前記識別情報の異なる前記観測データにおいて、類似すると判定された前記仰角と前記方位角とで構成される方向ベクトルの中から2組の方向ベクトルを選択しては、それらの距離が最小になるときの中点を求め、算出した前記中点の位置の平均値を算出し、当該平均値の位置を前記雷の発生位置として標定する
ことを特徴とする請求項1に記載の雷発生位置標定装置。
【請求項3】
前記雷発生位置標定装置は、
雲の動きを少なくとも含む気象情報データに基づいて、前記雷位置標定部によって標定した前記雷の発生位置の移動を予測し、雷発生地域を推定する雷予測部
を備えることを特徴とする請求項1または請求項2に記載の雷発生位置標定装置。
【請求項4】
前記雷放射観測装置は、
所定の半径を有する円状の領域の中心に設置され、前記円状の領域が、前記雷の発生位置の観測対象のエリアを含むように配置している
ことを特徴とする請求項1ないし請求項3のいずれか一項に記載の雷発生位置標定装置。
【請求項5】
雷の観測地点からみた雷から放射される信号の到来方向を示す仰角および方位角、当該信号を受信した時刻、GPS(Global Positioning System)受信機から取得した前記観測地点の位置情報、および送信元を識別する識別情報を雷発生位置標定装置に送信し、移動体に搭載された雷放射観測装置と、ネットワークを介して通信可能に接続される前記雷発生位置標定装置であって、
前記雷放射観測装置から、前記仰角の時系列、前記方位角、前記時刻、前記識別情報、および前記位置情報を含む観測データを受信する通信部と、
前記雷放射観測装置から受信した前記識別情報の異なる前記仰角の時系列の間で、当該仰角の時系列の時刻の間隔および仰角の値が類似するか否かを判定する類似判定部と、
前記類似判定部によって類似すると判定した複数の前記識別情報の異なる前記観測データを用いて、前記雷の発生位置を標定する雷位置標定部と
を備えることを特徴とする雷発生位置標定装置。
【請求項6】
雷の観測地点からみた雷から放射される信号の到来方向を示す仰角および方位角、当該信号を受信した時刻、前記観測地点の位置情報、および送信元を識別する識別情報を送信する複数の雷放射観測装置とネットワークを介して通信可能に接続される雷発生位置標定装置で用いられる雷発生地域推定方法あって、
前記雷発生位置標定装置は、
前記雷放射観測装置から、前記仰角の時系列、前記方位角、前記時刻、前記識別情報、および前記位置情報を含む観測データを受信するステップと、
前記雷放射観測装置から受信した前記識別情報の異なる前記仰角の時系列の間で、当該仰角の時系列の時刻の間隔および仰角の値が類似するか否かを判定する類似判定ステップと、
前記類似判定ステップによって類似すると判定した複数の前記識別情報の異なる前記観測データを用いて、前記雷の発生位置を標定する雷位置標定ステップと
雲の動きを少なくとも含む気象情報データに基づいて、前記雷位置標定ステップによって標定した雷の発生位置の移動を予測し、雷発生地域を推定する雷予測ステップと
を実行することを特徴とする雷発生地域推定方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2012−189522(P2012−189522A)
【公開日】平成24年10月4日(2012.10.4)
【国際特許分類】
【出願番号】特願2011−54931(P2011−54931)
【出願日】平成23年3月14日(2011.3.14)
【出願人】(000005452)株式会社日立プラントテクノロジー (1,767)
【Fターム(参考)】
【公開日】平成24年10月4日(2012.10.4)
【国際特許分類】
【出願日】平成23年3月14日(2011.3.14)
【出願人】(000005452)株式会社日立プラントテクノロジー (1,767)
【Fターム(参考)】
[ Back to top ]