
電力制御方法、電力制御装置および画像形成装置

【課題】交流電源の電圧波形が変動する場合でも当該変動に対応した位相制御を行い、不具合の生じにくい位相制御を行えるようにすること。
【解決手段】交流電源400から供給される交流電力を用いて位相制御を行う電力制御方法であって、交流電圧Vの絶対値が所定の値以下であることに対応して第1レベルを示し交流電圧の絶対値が所定の値より大きいことに対応して第2レベルを示すゼロクロス信号Szを生成し、このゼロクロス信号Szにおける、交流電圧Vの絶対値が所定の値以下である際の時間幅であるゼロクロス幅および交流電圧の絶対値が所定の値以上である際の時間幅である非ゼロクロス幅を検出し、検出したゼロクロス幅および検出した非ゼロクロス幅に基づいて、交流電圧Vの周波数および電圧値を検出し、検出した交流電圧Vの周波数および電圧値に応じて位相制御を行う。
【解決手段】交流電源400から供給される交流電力を用いて位相制御を行う電力制御方法であって、交流電圧Vの絶対値が所定の値以下であることに対応して第1レベルを示し交流電圧の絶対値が所定の値より大きいことに対応して第2レベルを示すゼロクロス信号Szを生成し、このゼロクロス信号Szにおける、交流電圧Vの絶対値が所定の値以下である際の時間幅であるゼロクロス幅および交流電圧の絶対値が所定の値以上である際の時間幅である非ゼロクロス幅を検出し、検出したゼロクロス幅および検出した非ゼロクロス幅に基づいて、交流電圧Vの周波数および電圧値を検出し、検出した交流電圧Vの周波数および電圧値に応じて位相制御を行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電力制御方法、電力制御装置、および画像形成装置に関する。本発明は、複写機、プリンタ、ファクシミリ装置、およびこれらの複合機などの電子写真方式の画像形成装置における電力制御などに利用される。特に、例えば、交流電源の周波数や電圧の変動が大きく、またノイズの多い電源環境にある画像形成装置における定着用ヒーターの電力制御に利用される。
【背景技術】
【0002】
電子写真方式を用いた画像形成装置は、通常、用紙上に形成されたトナー像を熱で溶融して定着させるためにヒーターを備える。近年においては定着用のヒーターが大電力化する傾向にあり、大きな突入電流により電源電圧が低下して同じ電源系統内の蛍光灯にちらつきが生じるなどの悪影響が発生している。また、突入電流によって、ヒーターを駆動制御するためのトランジスタやトライアックなどのスイッチング素子が破壊されるおそれがある。
【0003】
このような問題を解決するために、ヒーターへの通電初期において通電電流を徐々に増加させるスルーアップ制御が行われる。スルーアップ制御では、交流の各半サイクルにおいてスイッチング素子がオンする位相角を制御し、オンとなる導通角φを0からπまで徐々に増大させる。これによって、ヒーターをできるだけ速く暖めることができ、しかも突入電流を抑えることができる。また、必要に応じて、ヒーターへの通電終了時において通電電流を徐々に減少させるスルーダウン制御が行われる。このような位相制御によって、安定してヒータの温度制御を行うことができる。
【0004】
ところで、画像形成装置が設置されている電源環境が悪く、例えば電源配線のインピーダンスが高くなってしまっている場合に、位相制御におけるヒーターのオンのタイミングで画像形成装置に対する入力電圧の電圧降下がノイズとして発生する。
【0005】
その場合に、位相制御に用いるゼロクロス信号が本来のゼロクロスポイントではないタイミングで誤って出力されてしまうことがある。そうすると、誤ったゼロクロス信号に同期して位相制御が実行されるため、本来の位相制御を安定して実行できなくなる。そのような場合に、装置の誤動作を起こす可能性が高いことから、電源異常と判断して装置を停止させることがある。
【0006】
このような問題に関連して、入力交流電源のゼロクロスパルスの幅が所定範囲未満の場合は電源ノイズによる異常と判断し、所定範囲以上の場合には電源瞬断による異常と判断することなどが提案されている(特許文献1)。
【0007】
また、ノイズによって発生したゼロクロス割込みを無視してヒーターの誤動作を防ぐために、ヒーターの制御信号の立ち上がりから設定時間Tの間はゼロクロス信号の立ち上がりを無視することが提案されている(特許文献2)。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2007−064892号公報
【特許文献2】特開2009−204638号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかし、特許文献1、2などの従来技術による場合には、電源ノイズがゼロクロスパルス幅の所定範囲内に入ってしまって正しいゼロクロス信号と誤認識してしまった場合、または正しいゼロクロス信号と電源ノイズとが重なってしまった場合に、正しいゼロクロス信号を検出することができない。
【0010】
また、上に述べたように、画像形成装置の設置環境によっては、交流電源が不安定なため電圧や周波数の変動が起こってしまい、ゼロクロス信号の波形が変動して電源ノイズが発生することがある。そうすると、誤ったゼロクロス信号が発生する期間として所定の期間を決めておいても、電圧や周波数が変動すればこの期間も変動する可能性があり、正常なゼロクロス信号を検出することができなくなる。
【0011】
本発明は、上述の事情に鑑みてなされた発明であり、交流電源の電圧や周波数が変動する場合でも当該変動に対応した位相制御を行い、不具合の生じにくい位相制御を行えるようにすることを目的とする。
【課題を解決するための手段】
【0012】
本発明に係る電力制御方法は、交流電源から供給される交流電力を用いて位相制御を行う電力制御方法であって、前記交流電源からの交流電圧の絶対値が所定の値以下であることに対応して第1レベルを示し前記交流電圧の絶対値が所定の値より大きいことに対応して第2レベルを示すゼロクロス信号を生成し、前記ゼロクロス信号における、前記交流電圧の絶対値が所定の値以下である際の時間幅であるゼロクロス幅および前記交流電圧の絶対値が所定の値以上である際の時間幅である非ゼロクロス幅を検出し、前記検出したゼロクロス幅および前記検出した非ゼロクロス幅に基づいて、前記交流電圧の周波数および電圧値を検出し、前記検出した周波数および電圧値に応じて位相制御を行う。
【0013】
好ましくは、ノイズが生じていない状態の前記交流電圧における前記ゼロクロス幅および前記非ゼロクロス幅に基づいて生成された、基準となるゼロクロス幅である基準ゼロクロス幅および基準となる非ゼロクロス幅である基準非ゼロクロス幅と、前記検出したゼロクロス幅および前記検出した非ゼロクロス幅とを用いて、ノイズの影響を受けない前記ゼロクロス幅およびノイズの影響を受けない前記非ゼロクロス幅を検出し、前記検出したノイズの影響を受けないゼロクロス幅および前記検出したノイズの影響を受けない非ゼロクロス幅に基づいて、前記周波数および前記電圧値を検出し、前記検出した周波数および電圧値に応じて前記位相制御を行う。
【発明の効果】
【0014】
本発明によると、交流電源の電圧が変動する場合でも当該変動に対応した位相制御を行い、不具合の生じにくい位相制御を行うことができる。
【図面の簡単な説明】
【0015】
【図1】本発明の実施形態に係る画像形成装置の構成を示す図である。
【図2】画像形成装置における電力制御に関係する部分のブロック図である。
【図3】ゼロクロス信号の生成方法を説明するための図である。
【図4】電力制御部による全体的な制御における各部の波形を示す図である。
【図5】交流電源にノイズが乗った場合の各部の波形を示す図である。
【図6】スルーアップ制御などにおける待機時間のデータを示す図である。
【図7】ノイズにより生じる誤ったゼロクロス信号の例を示す図である。
【図8】正しいゼロクロス信号および繰返しパターンの例を示す図である。
【図9】ゼロクロス信号から正しいLow信号などを検出する処理を示す図である。
【図10】ゼロクロス信号から正しいLow信号などを検出する処理を示す図である。
【図11】周波数および電圧値を算出するためのデータの例を示す図である。
【図12】スルーアップ制御などのためのデータの例を示す図である。
【図13】電力制御部における電力制御の概略の流れが示されている。
【図14】電源投入時の動作を示す第1のフローチャートである。
【図15】電源投入時の動作を示す第2のフローチャートである。
【図16】待機中制御の第1動作を示す第1のフローチャートである。
【図17】待機中制御の第1動作を示す第2のフローチャートである。
【図18】待機中制御の第2動作を示す第1のフローチャートである。
【図19】待機中制御の第2動作を示す第2のフローチャートである。
【図20】L幅判定処理の動作を示す第1のフローチャートである。
【図21】L幅判定処理の動作を示す第2のフローチャートである。
【図22】L幅判定処理の動作を示す第3のフローチャートである。
【図23】画像形成装置のH幅判定処理の動作を示す第1のフローチャートである。
【図24】画像形成装置のH幅判定処理の動作を示す第2のフローチャートである。
【図25】ヒーターの位相制御の動作を示すフローチャートである。
【図26】ヒーターのオン制御の動作を示すフローチャートである。
【図27】ゼロクロス信号の重なり監視制御の動作を示すフローチャートである。
【発明を実施するための形態】
【0016】
〔画像形成装置の構成〕
図1には、本実施形態に係る画像形成装置1の構成の例が示されている。
【0017】
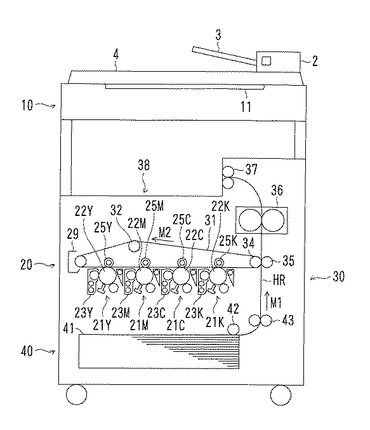
図1において、画像形成装置1は、タンデム型のプリントエンジンを内蔵した電子写真方式のフルカラー画像形成装置である。画像形成装置1は、一般に複合機またはMFP(Multi Function Peripherals)と呼ばれる装置であって、コピー、ネットワークプリンティング(PCプリント)、ファックス、およびスキャナなどの機能を集約した装置である。
【0018】
画像形成装置1は、画像読取部10、画像形成部(プリンタ部)20、用紙搬送部30、および用紙格納部40などを備える。
【0019】
画像読取部10は、原稿をセットするための載荷台3、原稿台ガラス11、載荷台3にセットされた原稿を原稿台ガラス11に自動的に1 枚ずつ搬送する搬送装置2、および画像が読取られた原稿を排出するための排出台4を有する。また、画像読取部10は図示していないスキャナを含む。
【0020】
スキャナは、原稿を照射する露光ランプ、原稿からの反射光の向きを変える反射ミラー、反射ミラーからの光路を変えるミラー、反射光を集光するレンズ、および受光した反射光に基づいて電気信号を発生する3列のCCD(Charge Coupled Device )などの光電変換素子を有する。電気信号は画像形成部30に送られる。
【0021】
載荷台3に設置された原稿は、搬送装置2によって搬送されて原稿台ガラス11上にセットされる。スキャナはスキャンモータによって原稿台ガラス11に対して平行移動し、原稿台ガラス11上にセットされた原稿の画像を露光走査する。
【0022】
画像形成部20は、電子写真方式によって用紙上に画像を形成するものであって、トナー像が転写される中間転写ベルト31、ローラー32、33、34、作像部21Y、21M、21C、21K、各作像部に対応する転写ローラー25Y、25M、25C、25K、および、クリーニング装置29を備える。
【0023】
作像部は、それぞれY(イエロー)、M(マジェンダ)、C(シアン)、K(ブラック)の4色にそれぞれ対応した作像部21Y、21M、21C、21Kから構成されている。作像部21Y、21M、21C、21Kは、この順で中間転写ベルト31に沿って配置されている。各作像部21Y、21M、21C、21Kは、それぞれ、感光体ドラム22Y、22M、22C、22Kおよび現像器23Y、23M、23C、23Kを備える。
【0024】
現像器23Y、23M、23C、23Kは、静電潜像が形成された感光体ドラム22Y、22M、22C、22Kの表面に形成された潜像を各色のトナーで現像する。
【0025】
クリーニング装置29は、二次転写後に中間転写ベルト31上に残留するトナーを除去する。
【0026】
中間転写ベルト31は、ローラー32、33、34によって弛まないように支持され、これらローラーが回転駆動することによって矢印M2方向に走行する。トナー像が形成された感光体ドラム22Y、22M、22C、22Kは、転写ローラー25Y、25M、25C、25Kと対向し、それらの間を中間転写ベルト31が走行する。これにより、中間転写ベルト31の表面には、各色のトナー像(トナー画像)が、順次、転写位置が互いに合うように重なって転写(一次転写)される。
【0027】
用紙格納部40は、印刷媒体である用紙を収納する給紙カセット41、給紙カセット41から用紙を取り出すピックアップローラー42、および搬送ローラー43を備える。
【0028】
用紙搬送部30は、二次転写ローラー35、定着装置36、ローラー37、および排紙トレイを備える。
【0029】
ピックアップローラー42が、給紙カセット41に収納されている用紙を1枚ずつ取り出し、搬送ローラー43が用紙を搬送路HRへと送る。搬送路HRへと送られた用紙YSは矢印M1方向に搬送される。
【0030】
用紙は、中間転写ベルト31の走行と同期して搬送され、転写ニップ部において、トナー像が形成された中間転写ベルト31と接する。二次転写ローラー35にバイアス電圧が加えられることで、中間転写ベルト31上に形成されたトナー像が用紙上に転写(二次転写)される。二次転写によってトナー像が転写された用紙は、定着装置36に送られる。中間転写ベルト31上に残留するトナーはクリーニング装置29により除去される。
【0031】
定着装置36は、互いに対向配置されニップ部を形成する2つのローラーを有する。ローラーの一方は内蔵したヒーターにより加熱される。
【0032】
トナー像が形成された用紙YSは、定着装置36のニップル部において加熱される。加熱によりトナーが溶融し、トナー像が用紙に定着する。なお、ローラーの内部に設置された熱源(ヒーター)については図示していない。熱源としては、例えばハロゲンヒーターなどを用いればよい。
【0033】
トナー像が定着された用紙は、搬送路HR上を搬送され、ローラー37により排紙トレイ38上に排出される。
〔画像形成装置1の電力制御〕
次に、画像形成装置1における電力制御について説明する。
【0034】
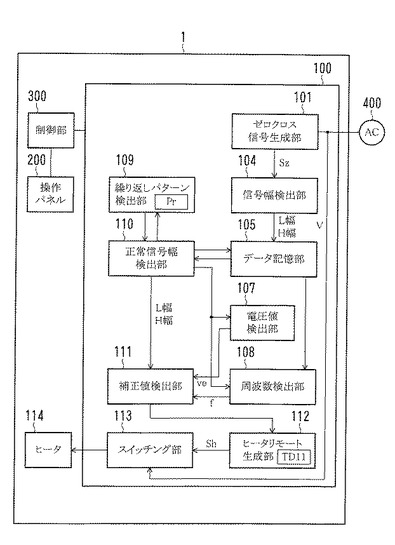
図2には、画像形成装置1における定着用のヒーターへの電力制御に関係する部分の説明のためのブロック図が示されている。
【0035】
図2において、画像形成装置1は、制御部(システムコントローラ部)300、操作パネル200、電力制御部100、および、交流負荷の1つであるヒーター114を備える。
【0036】
画像形成装置1は、交流電源400に接続されている。交流電源400は、商用の交流電力を画像形成装置1に供給する。画像形成装置1に供給された交流電力は、電力制御部100を介してヒーター114に供給される。
【0037】
制御部300は、例えば、CPU、MPU、ROM、RAM、インターフェース回路、その他の周辺回路またはハードウエア回路などを用いて構成され、画像形成装置1の各部に指令を出して動作を制御する。つまり、制御部300は、各部の動作状態を各部からの信号などにより把握し、各部の動作を全体的に管理し、統括する。
【0038】
操作パネル200は、操作者が画像形成装置1に動作の指示を与え、または設定の入力を行うためのものであり、各種ボタンや表示装置などを備えている。操作者は、操作パネル200により、画像形成装置1の設置場所における交流電源の基準周波数frおよび基準電圧値(基準実効値)verを入力できる。基準周波数frおよび基準電圧値verとは、画像形成装置1の設置されている場所の交流電源400から供給されているとされる周波数fおよび電圧値ve、つまり、公称の周波数および電圧値である。
【0039】
なお、基準周波数frおよび基準電圧値verを操作者が入力するのではなく、適当な検出回路により取得し、または適当なサーバから通信回線を介して取得するようにしてもよい。
【0040】
ヒーター114は、定着装置36のローラーの内部に装着されてローラーを加熱する。ヒーター114は、本実施形態においてはハロゲンヒーターが用いられるが、これ以外に、カーボンヒーター、電熱線、セラミックヒーター、または誘導加熱(IH:Induction Heating )コイルなどを用いることも可能である。
【0041】
電力制御部100は、本実施形態においては、画像形成部20における電力制御を実行する。
【0042】
すなわち、電力制御部100は、交流電源400からの交流電圧の絶対値が所定の値以下であることに対応して第1レベルを示し交流電圧の絶対値が所定の値より大きいことに対応して第2レベルを示すゼロクロス信号Szを生成する。
【0043】
ゼロクロス信号Szとして、例えば第1レベルをLレベルとし第2レベルをHレベルとした2値信号とすることが可能である。LレベルとHレベルとは相対的なものであるから、正負極のいずれをLまたはHとしてもよい。
【0044】
そして、ゼロクロス信号Szにおける、交流電圧の絶対値が所定の値以下である際の時間幅であるゼロクロス幅、および、交流電圧の絶対値が所定の値以上である際の時間幅である非ゼロクロス幅を検出する。さらに、検出したゼロクロス幅および検出した非ゼロクロス幅に基づいて、交流電圧の周波数および電圧値を検出する。検出した交流電圧の周波数および電圧値に応じて、位相制御を行う。
【0045】
例えば、交流電源400からの電圧波形に基づいて、交流の半サイクルごとのゼロクロス信号Szを生成し、ゼロクロス信号Szを元にして、Low信号の時間幅であるL幅(ゼロクロス幅)と、High信号の時間幅であるH幅(非ゼロクロス幅)とを検出する。
【0046】
これらL幅およびH幅、またはこれらの和である周期Thに基づいて、交流電源400の周波数fおよび電圧値veを求める。また、L幅およびH幅についてのエッジ間隔が検出され、この検出結果に基づいて内部タイマを起動し、内部タイマのタイムアップをトリガとしてヒーターリモート信号Shを生成し、ヒーター114の位相制御を行う。詳しくは後述する。
【0047】
電力制御部100は、ゼロクロス信号生成部101、信号幅検出部104、データ記憶部105、電圧値検出部107、周波数検出部108、繰返しパターン検出部109、正常信号幅検出部110、補正値検出部111、ヒーターリモート生成部112、およびスイッチング部113を備えている。電力制御部100は、例えば、CPU、MPU、RAM、ROM、I/O素子、その他の電子回路素子または電子回路などにより構成される。
【0048】
ゼロクロス信号生成部101は、交流電源400からの交流電圧Vに基づいてゼロクロス信号Szを生成する。
【0049】
図3は、ゼロクロス信号Szの生成方法を説明するための図であり、上段には交流電圧Vが、下段にはゼロクロス信号Szが示されている。
【0050】
ゼロクロス信号生成部101は、交流電圧Vの絶対値が所定の値以下である場合にLow信号を出力し、それ以外の場合にはHigh信号を出力することでゼロクロス信号Szを生成する。このように、ゼロクロス信号Szは、交流電圧Vが所定の値以下か所定の値以上かで、LowかHighかが決まる。なお、本実施形態では交流電圧Vの絶対値が30V以下である場合にはLowとなる。ゼロクロスポイントZpは、Low信号Lの時間幅であるL幅(ゼロクロス幅)の中心に位置する。
【0051】
なお、スルーアップまたはスルーダウンなどの位相制御が行われている状態では、交流電圧Vにノイズが乗っている可能性があるので、位相制御が行われている状態で生成されるゼロクロス信号Szには誤ったLow信号Lが含まれている可能性がある。これに対する処理方法については後で述べる。
【0052】
なお、ゼロクロス信号SzにおけるLow信号LとHigh信号とを逆にし、ゼロクロスポイントにおいてHigh信号となるようにしてもよい。
【0053】
信号幅検出部104は、ゼロクロス信号SzのLow信号Lの時間幅であるL幅(ゼロクロス幅)と、High信号Hの時間幅であるH幅(非ゼロクロス幅)とを検出する。具体的には、ゼロクロス信号Szの立下りエッジから立上りエッジの間隔および立上りエッジから立下りエッジの間隔を検出する。
【0054】
データ記憶部105は、正常信号幅検出部110において検出した正しいL幅およびH幅を時系列に沿って記憶していく。また、各値を検出する際に必要となる信号幅検出部104により検出したL幅およびH幅や各繰返しパターンなども記憶する。
【0055】
電圧値検出部107は、正常信号幅検出部110により検出された正しいL幅およびH幅に基づいて、交流電圧Vの電圧値veを検出する。
【0056】
周波数検出部108は、正常信号幅検出部110により検出された正しいL幅およびH幅に基づいて、交流電圧Vの周波数fを検出する。
【0057】
繰返しパターン検出部109は、L幅、H幅、および隣接するL幅とH幅との和である周期Thについて、繰返しパターンPrを検出する。繰返しパターンPrは、ゼロクロス信号Szにおいてノイズにより生じたLow信号Lが含まれていないかを検出(チェック)するために用いられる。
【0058】
繰返しパターンPrは、ゼロクロス信号Szにおけるノイズを含まないL幅、H幅、および周期Thの、それぞれの平均値の全体である。なお、L幅、H幅、および周期Thについて、それぞれを繰返しパターンPrということもある。
【0059】
つまり、繰返しパターンPrは、ノイズが生じていない状態の交流電圧Vcにおけるゼロクロス幅および非ゼロクロス幅に基づいて生成された、基準となるゼロクロス幅である基準ゼロクロス幅および基準となる非ゼロクロス幅である基準非ゼロクロス幅を含む。
【0060】
なお、繰返しパターンPrは、画像形成装置1の電源を立ち上げた初期の状態、つまりノイズが発生している可能性が低い状態で得られたゼロクロス信号Szに基づいて、L幅、H幅、および周期Thの各複数個(例えば各5個)の平均値から初期の繰返しパターンPrが生成される。その後に、適時得られたゼロクロス信号Szについて、ノイズを含まないL幅、H幅、および周期Thを含めて平均値を算出し、これによって繰返しパターンPrが更新される。
【0061】
繰返しパターンPrの例、および繰返しパターンPrの生成方法および更新方法については、後で詳しく説明する。
【0062】
正常信号幅検出部110は、ゼロクロス信号SzのL幅およびH幅のそれぞれが、ノイズに起因しない正しいものか、またはノイズに起因して生じた誤ったものかを判定し、それにより正しいL幅およびH幅を検出する。
【0063】
補正値検出部111は、周波数検出部108により検出された周波数f、および、正常信号幅検出部110により検出された正しいL幅およびH幅に基づいて、交流電圧Vの電圧値(実効値)veを検出する。そして、検出された周波数fおよび電圧値veを、基準周波数frおよび基準電圧値verと比較し、正しい位相制御のための補正値を検出する。
【0064】
なお、本実施形態では、電圧値veとして実効値を用いるが、例えば最大値などのように、実効値でない電圧値を用いてもよい。また、電圧値veは、必ずしも現実の電圧の値を直接に示すものでなくてもよく、電圧の値と関係のあるデータであってもよい。周波数fについても、必ずしも現実の周波数の値を直接に示すものでなくてもよく、周波数の値と関係のあるデータであってもよい。
【0065】
ヒーターリモート生成部112は、スイッチング部113の動作を制御するためのヒーターリモート信号Shを、補正値検出部111で検出された補正値に基づいて生成する。なお、ヒーターリモート生成部112は、制御部300からヒーター114を動作させる指示があった際にヒーターリモート信号Shを生成する。
【0066】
ヒーターリモート信号Shはゼロクロス信号SzのLow信号Lと同期してオフとなり、所定のオフ時間(待機時間)の経過後にオンとなる。待機時間を示すデータTD11は、ヒーターリモート生成部112が保持するか、またはヒーターリモート生成部112が読み込み可能となっている。
【0067】
ヒーターリモート信号Shがオンになると、スイッチング部113がオンしてヒーター114にヒーター電流Ihが流れる。ヒーター電流Ihは交流波形を有することから、半サイクル内でゼロになるが、ゼロになるまで流れ続ける。
【0068】
スイッチング部113は、サイリスタ、双方向タイリスタ、IGBT、その他の位相制御が可能なスイッチング素子などからなり、ヒーターリモート信号Shに基づいてオンまたはオフすることにより、ヒーター114への電力供給を制御する。
【0069】
以下、さらに詳しく説明する。
〔交流電圧その他の信号の波形〕
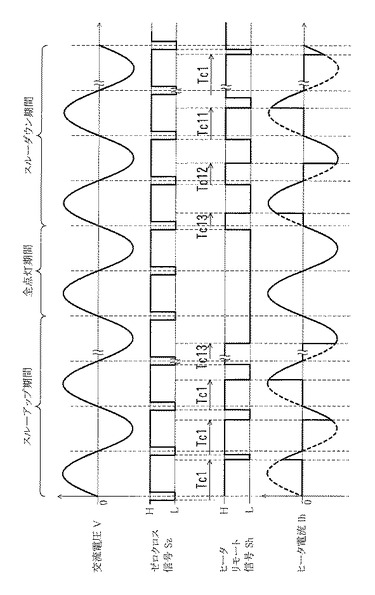
図4には、電力制御部100による全体的な制御における各部の波形が示され、図5には交流電源400にノイズが乗った場合の各部の波形が示されている。なお、図5において、上段の交流電圧はノイズが乗っていない状態の波形を示し、下方段の交流電圧はノイズが乗った状態の波形を示す。
【0070】
図4において、交流電圧は画像形成装置1における交流負荷であるヒーター114に供給される交流電圧Vを示す。ゼロクロス信号Szは、交流電圧Vにおけるゼロクロスポイントの前後の所定期間においてLowとなり、それ以外の期間はHighとなる信号である。
【0071】
ヒーターリモート信号Shは、ヒーター114に電流の流れる時間を指示する信号である。具体的には、双方向サイリスタなどにより構成されたスイッチング素子のオン/オフを制御する信号である。交流電圧の各半サイクルの始点に対応するゼロクロス信号SzがLowになるのをトリガーとして、所定時間が経過した後にLow(アクティブ)となる。
【0072】
ヒーターリモート信号ShがLowでスイッチング素子がオンとなり、ヒーターに入力電流Ihが流れ始める。ヒーターリモート信号Shは、ゼロクロス信号Szが次にLowとなった時にHighとなり、再び所定時間が経過した後にLowとなる。ヒーターへ114の通電は、ヒーターリモート信号ShがHighになるのとは関係がなく、交流電圧の半サイクルの終点(ゼロ点)ごとに停止する。
【0073】
ゼロクロス信号SzがLowになってから、ヒーターリモート信号ShがLowとなるまでの待機時間(経過時間)は、徐々に変化していく。つまり、スルーアップ制御の場合は、この待機時間が徐々に減少していく。逆に、スルーダウン制御の場合は、この待機時間が徐々に増加していく。
【0074】
それにより、スルーアップ制御においてヒーターへの供給電力は徐々に増加していき、スルーダウン制御においてヒーターへの供給電力は徐々に減少していく。ゼロクロス信号SzがLowになってから、ヒーターリモート信号ShがLowとなるまでの待機時間については、図6に示されている。
【0075】
つまり、図6には、交流電圧の周波数が50Hzの場合と60Hzの場合とについて、スルーアップ制御またはスルーダウン制御における待機時間のデータTD11が示されている。データTD11に示された待機時間は、電力制御部100に設けられた内部タイマに設定される。本実施形態では、内部タイマに設定される時間によって、スイッチング部113における位相角φおよび導通角が可変される。
【0076】
図6において、待機時間は、交流電圧の半サイクルごとに、スルーアップ制御であればTc1からTc13へと順次変化し、スルーダウン制御であればTc13からTc1へと順次変化する。
【0077】
上に述べたように、スルーアップ制御およびスルーダウン制御を行うことによりヒーターを安定して制御することができる。
【0078】
また、交流電圧Vにノイズが生じていない場合は、ゼロクロス信号Szにおいても誤ったLow信号Lが生じることなく、信号幅検出部104により検出したL幅およびH幅は正しい値である。このように正しいL幅およびH幅が検出できれば、これらに基づいて交流電圧Vの周波数だけでなく、電圧値も求めることができる。
【0079】
なお、スルーアップ制御またはスルーダウン制御のためのデータとして、後で説明する図12のデータTD3〜6のような形式を用いることも可能である。
【0080】
図5において、下方段に示す交流電圧Vaは、ヒーターリモート信号Shによりノイズが生じた交流電圧である。交流電圧Vaに基づいてゼロクロス信号Szaが生成される。ゼロクロス信号Szaはノイズを含む信号であり、ゼロクロス信号Szと比べるとわかるように、ゼロクロスポイント(Low信号の状態)が多くなる。
【0081】
ゼロクロス信号SzaのLow信号にはノイズにより生じたものが含まれていることから、ゼロクロス信号Szaに同期させて位相制御を行うと、正しい位相制御が行われない。
【0082】
図7には、ノイズにより生じる誤ったゼロクロス信号Szの例が示されている。
【0083】
図7(A)〜(D)において、それぞれ、正しいLow信号L1、L2以外に、誤ったLow信号が生じている。これらの誤ったLow信号は、正しいLow信号L1およびL2の間であるゼロクロス信号間隔において生じている。
【0084】
図7(A)に示す例では、正しいLow信号L1およびL2の間に、誤ったLow信号Ln1が生じている。このLow信号Ln1が、Low信号として認識されてしまう可能性がある。
【0085】
図7(B)に示す例では、正しいLow信号L2と誤ったLow信号とが重なったことにより、信号幅の大きなLow信号Ln2が生じている。このLow信号Ln2が、1つのLow信号として認識されてしまう可能性がある。
【0086】
図7(C)に示す例では、正しいLow信号L1およびL2の間に、複数の誤ったLow信号Ln3、Ln4、Ln5が生じている。これらLow信号Ln3、Ln4、Ln5が、それぞれLow信号として認識されてしまう可能性がある。
【0087】
図7(D)に示す例では、正しいLow信号L1およびL2の間に、誤ったLow信号が複数生じて、そのうちの1つがLow信号L2と重なったことにより信号幅の大きなLow信号Ln6が生じている。Low信号L1とLow信号Ln6との間に複数の誤ったLow信号Ln7およびLn8が生じている。このLow信号Ln6、Ln7、Ln8が、それぞれLow信号として認識されてしまう可能性がある。
【0088】
そこで、本実施形態の電力制御部100では、ノイズによるこのような誤ったLow信号Ln1〜6が生じた場合でも、それをLow信号として認識してしまうことなく、正しいLow信号L1、L2に基づいて位相制御が行われる。
【0089】
次に、正しいL幅およびH幅を用いて、交流電圧Vの電圧値を求める方法について説明する。
〔ノイズの影響を除去した正しいL幅およびH幅の検出方法〕
まず、ゼロクロス信号Szにおける正しいL幅およびH幅を検出する方法について説明する。
【0090】
図8には、正しいゼロクロス信号Sz、および繰返しパターンPrの例が示されている。
【0091】
図8において、正しいゼロクロス信号Szは、Low信号の幅(L幅)がWl、High信号の幅(H幅)がWh、周期の幅がWtである。
【0092】
また、繰返しパターンPrは、Low信号の幅(L幅)がWL、High信号の幅(H幅)がWH、周期の幅がWTである。
【0093】
そして、ゼロクロス信号生成部101において生成されるゼロクロス信号Szについて、繰返しパターンPrとの比較を行う。Low信号の幅WlとWL、High信号の幅WhとWH、周期の幅WtとWTの差が、それぞれ所定の範囲内である場合にそれが正しいゼロクロス信号Szであると判断し、所定の範囲内でない場合にそれ誤ったゼロクロス信号Szであると判断する。
【0094】
すなわち、次の(1)式の各条件、
|WL−Wl|<α1
|WH−Wh|<α2
|WT−Wt|<α3 ……(1)
が満たされる場合に、それぞれLow信号の幅、High信号の幅、周期の幅が正しいとし、正しいと判断されたLow信号またはHigh信号のタイミングに基づいて位相制御が行われる。
【0095】
また、上の(1)式の条件が満たされない場合に、そのLow信号の幅、High信号の幅、周期の幅は誤っているとし、正しいLow信号またはHigh信号を検出するための処理が続行される。
【0096】
以下、詳しく説明する。まず、L幅の判断方法について説明する。
【0097】
正常信号幅検出部110は、信号幅検出部104により検出された今回のL幅と繰返しパターンPrのL幅WLとを比較する。これらが一致すれば、今回のL幅と前回検出された正しいH幅(一時H幅)とを加算したものを繰返しパターンPrの周期WTと比較する。これらが一致すれば、今回のL幅は正しいと判断する。なお、前回検出された正しいH幅はデータ記憶部105から読み出す。
【0098】
今回のL幅とL幅WLとが一致しない場合は、今回のL幅と前回検出された正しいH幅とを加算したものを周期WTと比較する。これらが一致すれば、今回のL幅は正しいと判断する。一致しない場合は、今回のL幅と前回検出された正しいH幅とにおけるL幅率およびH幅率を算出し、その値が基準周波数frと同じであれば今回のL幅は正しいと判断し、同じでない場合は今回のL幅は誤っていると判断する。
【0099】
また、今回のL幅とL幅WLとの比較において、それらが一致していない場合でも、今回のL幅と前回検出された正しいH幅とを加算したものと周期WTとが一致すれば、今回のL幅は正しいと判断する。一致しない場合は、今回のL幅と前回検出された正しいH幅とにおけるL幅率およびH幅率を算出し、その値が基準周波数frと同じであれば今回のL幅は正しいと判断し、同じでない場合は今回のL幅は誤っていると判断する。
【0100】
L幅が誤っていると判断した場合にはさらにそれら誤ったL信号Lが正しいL信号Lに重なって、1つのL信号Lを形成していないかを判断する。
【0101】
次に、H幅の判定方法について説明する。
【0102】
正常信号幅検出部110は、信号幅検出部104により検出された今回のH幅(一時H幅)と繰返しパターンPrのH幅WHとを比較する。これらが一致すれば、今回のH幅と前回検出された正しいL幅(正常L幅)とを加算したものを周期WTと比較する。これらが一致すれば、今回のH幅は正しいと判断する。なお、前回検出された正しいL幅はデータ記憶部105から読み出す。
【0103】
今回のH幅とH幅WHとが一致しない場合は、今回のH幅と前回検出された正しいL幅とを加算したものを周期WTと比較する。これらが一致すれば、今回のL幅は正しいと判定する。一致しない場合は、今回のH幅と前回検出された正しいL幅とにおけるH幅率およびL幅率を算出し、その値が基準周波数frと同じであれば今回のH幅は正しいと判断し、同じでない場合は今回のH幅は誤っていると判定する。
【0104】
また、今回のH幅とH幅WHとの比較において、それらが一致していない場合でも、今回のH幅と前回検出された正しいL幅とを加算したものと周期WTとが一致すれば、今回のH幅は正しいと判断する。一致しない場合は、今回のH幅と前回検出された正しいL幅とにおけるH幅率およびL幅率を算出し、その値が基準周波数frと同じであれば今回のH幅は正しいと判断し、同じでない場合は今回のH幅は誤っていると判断する。
【0105】
ただし、時間幅が一致するとは、完全に同一の値をとらなくてもよく、多少の誤差分は含んでもよい。また、変動率についても同様に、同じ値とは、完全に同一の値でなくても多少の誤差分は含んでもよい。
【0106】
次に、誤ったゼロクロス信号Szから正しいLow信号またはHigh信号を検出するための具体的な処理について、図9および図10を参照して説明する。
【0107】
図9には、図7(A)に示すゼロクロス信号Szから正しいLow信号またはHigh信号を検出する処理の例が示されている。
【0108】
図9(A)において、Low信号L1の幅Wl1と繰返しパターンPrのLow信号Lの幅WLとが比較される。これらは同じであったので、つまり所定の範囲内であったので、Low信号L1は正しいと判断される。これによって、Low信号L1のタイミング、例えば立ち上がりまたは立ち下がりのタイミングが、必要に応じて、種々の制御のためにリアルタイムで用いられる。
【0109】
次に、High信号の幅Wh1と繰返しパターンPrのHigh信号の幅WHとが比較される。Low信号Ln1はノイズによるものであるので、幅Wh1は幅WHよりも大幅に小さく、上の(1)式の条件は満たされない。したがって、High信号H1は誤ったものと判断され、High信号H1は制御のためには用いられない。
【0110】
次に、図9(B)において、Low信号Ln1の幅Wl2と繰返しパターンPrのLow信号Lの幅WLとが比較される。これらは同じであったとすると、次に、Low信号L1の幅Wl2とHigh信号H1の幅Wh1との合計である周期の幅Wt2と、繰返しパターンPrの周期WTとが比較される。すると、幅Wt2は幅WTよりも大幅に小さく、上の(1)式の条件は満たされない。したがって、Low信号Ln1は誤ったものと判断され、Low信号Ln1は制御のためには用いられない。
【0111】
なお、誤ったものと判断されたHigh信号H1の「幅Wh1」は、正しくない幅であり、次のLow信号L1のチェックに一時的に用いられるものであるので、これを「一時幅」ということがある。また、正しいと判断された幅であっても、次の信号のチェックに一時的に用いられる場合に、これを「一時幅」ということがある。
【0112】
次に、図9(C)において、High信号H2の幅Wh2と周期の幅Wt2との合計である幅Wh3と、繰返しパターンPrのHigh信号の幅WHとが比較される。この例ではこれらが同じであったので、幅Wh3は正しいと判断される。したがって、この時点で、幅Wh3の終点、つまり次のLow信号L2の立ち下がりエッジが、内部タイマーの計時開始のトリガーとして用いられる。
【0113】
次に、図9(D)において、Low信号L2の幅Wl3と繰返しパターンPrのLow信号Lの幅WLとが比較される。これらは同じであったので、Low信号L2は正しいと判断される。
【0114】
つまり、幅Wh3が正しいと判断され、かつ幅Wl3が正しいと判断されたので、Low信号L2は正しいLow信号であることが分かる。
【0115】
なお、High信号の幅とLow信号の幅との合計はその信号の周期の幅に等しいので、これら3つの変数のうち、可能な範囲でいずれか2つの変数を用いてチェックを行えばよい。
【0116】
例えば、図9(D)において、Low信号L2の幅Wl3と繰返しパターンPrのLow信号Lの幅WLとを比較したが、これに代えて、Low信号L2の幅Wl3と幅Wh3との合計である周期Wt4と、繰返しパターンPrの周期WTとを比較してもよい。
【0117】
図10には、図7(B)に示すゼロクロス信号Szから正しいLow信号またはHigh信号を検出する処理の例が示されている。
【0118】
図10(A)において、Low信号L1の幅Wl1と繰返しパターンPrのLow信号Lの幅WLとが比較される。これらは同じであったので、Low信号L1は正しいと判断される。
【0119】
次に、High信号H1の幅Wh1と繰返しパターンPrのHigh信号の幅WHとが比較される。Low信号Ln2はノイズによるものであるので、幅Wh1は幅WHよりも小さく、上の(1)式の条件は満たされない。したがって、High信号H1は誤ったものと判断され、High信号Hは制御のためには用いられない。
【0120】
図10(B)において、繰返しパターンPrの周期WTと、幅Wl1と幅Wh1との合計である周期Wt1との差、つまり残りH幅Wdが算出され、残りH幅Wdと幅WLとが比較される。残りH幅Wdが幅WL以下である場合には、H幅Wh1の次に検出されるL幅Wl2はノイズと正しいLow信号とが重なって生じたLow信号の時間幅である可能性がある。残りH幅Wdが幅WL以下であり、次に検出されるL幅Wl2が誤っていれば、L幅Wl2は、ノイズと正しいLow信号とが重なって生じたLow信号によるものであり、誤ったものと判定される。
【0121】
図10(C)において、Low信号Ln2の幅Wl2と幅WLとが比較される。幅WLが幅Wl2よりも大幅に小さく、上の(1)式の条件は満たされない。したがって、Low信号Ln2は誤ったものと判断される。また、残りH幅Wdが幅WL以下であったことから、Low信号Ln2はノイズと正しいLow信号とが重なって生じた誤った信号であると判断される。
【0122】
Low信号Ln2は、ノイズと正しいLow信号とが重なったものであるため、正しいLow信号の立下りのタイミングを判断することが困難である。そこで、例えば、Low信号Ln2の立下りから残りH幅Wdだけ経過したタイミングを正しいLow信号の立下りのタイミングとする。
【0123】
このように決定したタイミングで、本実施形態においては、内部タイマーが起動され、計時が開始される。
【0124】
なお、内部タイマー(オフタイマーまたはオンタイマー)は、CPU、MPU、またはハードウエア回路によって構成することが可能である。
〔繰返しパターンPr〕
次に、繰返しパターンPrのL幅WL、H幅WH、および周期WTの検出方法について説明する。
【0125】
ヒーター114の位相制御が開始される前の交流電圧Vには、ノイズが生じている可能性が低い。したがって、まず、画像形成装置1の電源を立ち上げた初期において信号幅検出部104により検出されたそれぞれ5回分のL幅およびH幅の平均をとり、この平均値を初期のL幅WL、H幅WHとする。
【0126】
そして、位相制御が開始された後は、正常信号幅検出部110により検出された正しいL幅およびH幅を、それぞれ、L幅WL、H幅WHに加えて変数Kで除する。すなわち、それらの平均値を算出し、その平均値を新しいL幅WL、H幅WHとして更新する。
【0127】
このようにして、繰返しパターンPrのL幅WL、H幅WHが更新される。なお、変数Kとして、2を用いることができる。つまり、変数Kを2とした場合は、更新の度ごとに、それまでのL幅WL、H幅WHと新しく検出されたL幅、H幅との単純平均をとることになる。しかし、単純平均に限らず、L幅WL、H幅WH、新しく検出されたL幅WL、H幅WHに係数を掛けるなどとした上で、変数Kを、2以外の数値、例えば、3、4、5、10などとして平均をとることも可能であり、更新の回数に応じて変数Kの値を大きくしていくことも可能である。
【0128】
また、初期のL幅WL、H幅WHを求める際に、上では5回分の平均値としたが、5回分以外、例えば、10回分、20回分などとしてもよい。
【0129】
繰返しパターンPrの周期WTは、互いに隣接するL幅WLとH幅WHとの和として求めればよい。
〔L幅およびH幅に基づく周波数および電圧値の算出〕
次に、ゼロクロス信号Szから得られたL幅およびH幅に基づいて、周波数fおよび電圧値veを算出する方法について説明する。
【0130】
図11には、L幅およびH幅に基づいて周波数fおよび電圧値veを算出するためのデータTD1、TD2が示されている。
【0131】
つまり、図11(A)に示すデータTD1は、交流電圧Vの電圧値(実効値)veの変化に対するL幅およびH幅の関係を示し、このデータTD1を用いて、L幅、H幅、またはそれらの変動率から電圧値veを求めることができる。
【0132】
また、図11(B)に示すデータTD2は、交流電圧Vの周波数fの変化に対するL幅およびH幅の関係を示す。データTD2が示すように、周波数fが変化してもL幅とH幅との比率は一定である。また、L幅とH幅との合計である周期は、半サイクルの周期に相当するから、次の(2)式から周波数fを求めることができる。
【0133】
f=1/2(L幅+H幅) ……(2)
以下、図11(A)(B)に示すデータTD1,2について説明する。
【0134】
データTD1は、交流電圧Vが50Hzであるとして、電圧値veを80V〜130Vに変化させた際に生成されるゼロクロス信号SzからL幅およびH幅をそれぞれ検出した値を示す。なお、ゼロクロス信号Szは、ノイズの影響を除去したゼロクロス信号Szが用いられる。
【0135】
また、電圧値veが100VのL幅およびH幅を基準として、異なる電圧値veにおけるL幅およびH幅を百分率で表示したL幅変動率およびH幅変動率が示されている。なお、マイナスが付されているのは、100Vの場合よりも減少していることを示す。
【0136】
さらに、100V以上の場合は、H幅変動率からL幅変動率を減算した値が示されており、100V以下の場合は、H幅変動率とL幅変動率とを加算した値が変動率として示されている。
【0137】
電圧変動率は、100Vに対する各電圧の変化率が示されている。
【0138】
データTD1から分かるように、交流電圧Vが変動しても、変動率から交流電圧Vの電圧値veを推測して検出することができる。
【0139】
データTD2は、交流電圧Vの電圧値veを100Vとして、周波数を40Hz〜72Hzに変化させた際に生成されるゼロクロス信号SzからL幅およびH幅をそれぞれ検出した値を示する。なお、ゼロクロス信号Szは、ノイズの影響を除去したゼロクロス信号Szが用いられる。
【0140】
また、周波数ごとにL幅とH幅とを加算したものを基準として、L幅およびH幅をそれぞれ百分率で表示したL幅率およびH幅率が示されている。
【0141】
データTD2から分かるように、交流電圧Vの電圧値veが変化しないのであれば、周波数fが変化してもL幅率およびH幅率はそれぞれ一定である。
【0142】
図11に示した結果から、交流電圧Vにおいて周波数fおよび電圧値veが同時に変動した場合には、まず周波数fが変動しているか否かをチェックして変動後の周波数fを算出し、次に上記変動率から電圧値veを算出すればよい。なお、上に述べたように、L幅とH幅を加算すると、交流電圧Vの周期の半分の値を求めることができるので、この値から交流電圧Vの周波数fを求めることができる。
〔位相制御の補正〕
次に、位相制御とその補正について説明する。
【0143】
図12には、スルーアップ制御またはスルーダウン制御のためのデータTD3〜TD6の例が示されている。
【0144】
これらのデータTD3〜TD6は、13回分のデータであり、交流電圧Vの半サイクルが13回分続くことによってスルーアップ制御またはスルーダウン制御が完了する。しかし、13回分のデータではなく、例えば20回分、50回分などの適当な個数のデータTDを用いてスルーアップ制御またはスルーダウン制御を行うことができる。
【0145】
図12(A)のデータTD3は、スルーアップ制御における半サイクル毎のヒーター114のオフおよびオンの時間の割合の一例を示す。スルーアップ制御であるので、半サイクルの数が増加するごとにヒーター114のオンの時間が徐々に増加する。なお、1回より以前は、ヒーター114には電力が供給されていない。また、13回より後は、ヒーター114には一定の電力が供給されている。
【0146】
図12(B)のデータTD4は、スルーダウン制御における半サイクル毎のヒーター114のオフおよびオンの時間の割合の一例を示す。スルーダウン制御であるので、半サイクルの数が増加するごとにヒーター114のオンの時間が徐々に減少する。なお、1回より以前は、ヒーター114には一定の電力が供給されている。また、13回より後は、ヒーター114には電力が供給されていない。
【0147】
図12(C)のデータTD5は、周波数fが50Hzの場合のスルーアップ制御におけるヒーター114のオフの時間およびオンの時間の一例を示す。
【0148】
図12(D)のデータTD6は、周波数fが65Hzの場合のヒーター114のスルーダウン制御におけるオフの時間およびオンの時間の一例を示す。
【0149】
上に述べたように、交流電圧Vの周波数fや電圧値veが変動すると、位相制御が予定通りに行われない。例えば、データTD3にしたがってスルーアップ制御を行っている際に、半サイクルの1回目から2回目の間で急激に電圧値veが低下した場合には、データTD3にしたがって2回目におけるヒーター114のオンの割合が25%のままでは当初の予定通りの電力がヒーター114に供給されない。そこで、このような場合には、交流電圧Vの電圧値veに応じて適度にオンの割合が大きくなるように補正することが好ましい。
【0150】
補正値検出部111は、例えばTD3〜TD6のように、各電圧値および各周波数対応する基準となる周波数および電圧値のデータを複数記憶している。そして、検出した電圧値および周波数に応じて、ヒーター114のオンオフ時間が好ましい時間となるような補正値を算出する。
【0151】
ここで、例えば、交流電圧Vの周波数fが変動し、電圧値veが変動していない場合について説明する。
【0152】
元の交流電圧Vよりも周波数が増加した場合には、H幅、L幅および周期はいずれも減少する。この場合に、元の交流電圧Vにおけるオフおよびオンの時間の割合を用いると、半サイクルあたりヒーター114に供給する電力量が元の交流電圧Vに比べて減少する。そこで、この場合には、オフの時間が短くなりオンの時間が長くなるように補正する。
【0153】
また、元の交流電圧Vよりも周波数が減少した場合には、H幅、L幅、および周期はいずれも増加する。この場合に、元の交流電圧Vにおけるオフおよびオンの時間の割合を用いると、半サイクルあたりヒーター114に供給する電力量が元の交流電圧Vに比べて増加する。そこで、この場合には、オフの時間が長くなりオンの時間が短くなるように補正する。
【0154】
次に、例えば、交流電圧Vの周波数fが変動せず、電圧値veが変動する場合について説明する。
【0155】
元の交流電圧Vよりも電圧値veが上昇した場合には、H幅が増加し、L幅が減少し、周期は変化がない。この場合に、元の交流電圧Vにおけるオフおよびオンの時間の割合を用いると、半サイクルあたりヒーター114に供給する電力量が元の交流電圧Vに比べて増加する。そこで、この場合には、オフの時間が長くなりオンの時間が短くなるように補正する。
【0156】
また、元の交流電圧Vよりも電圧値veが低下した場合には、H幅が減少し、L幅が増加し、周期は変化がない。この場合に、元の交流電圧Vにおけるオフおよびオンの時間の割合を用いると、半サイクルあたりヒーター114に供給する電力量が元の交流電圧Vに比べて減少する。そこで、オフの時間が短くなり、オンの時間が長くなるように補正する。
【0157】
例えば、交流電圧Vの電圧値が100Vのままで、周波数が50Hzから47Hzに変動する場合の補正値について説明する。スルーダウン制御が行われている場合に、周波数が50Hzであれば、3回目の半サイクルにおいてオフ時間は3msであり、オン時間は7msであることが好ましい。これに対して、周波数が47Hzであれば、3回目の半サイクルにおいてオフ時間は3.19msであり、オン時間は7.45msであることが好ましい。
【0158】
2回目の半サイクルまでは周波数が50Hzの場合に好ましいデータに基づいて位相制御を行っているが、3回目で周波数が47Hzに減少したので、オフ時間を増加させることが好ましい。
【0159】
補正値としては、47Hzのオフ時間およびオン時間を加算したものを、50Hzのオフ時間およびオン時間を加算したもので除した値とすればよい。つまり、この場合の補正値は、1.064(=10.64ms/10ms)である。
【0160】
ヒーターリモート生成部112は、この補正値を、47Hzの場合に好ましいオフ時間(3.19ms)に乗ずることにより、スイッチング部113に指示するオフ時間を求める。
【0161】
具体的には、3.39ms(=3.l9ms×1.064)が好ましいオフ時間であり、ヒーターリモート生成部112は、この値に基づいてヒーターリモート信号Shを生成する。
〔フローチャートによる説明〕
次に、電力制御部100による電力制御について、フローチャートを参照して説明する。
【0162】
図13には、電力制御部100における電力制御の概略の流れが示されている。
【0163】
図13において、画像形成装置1の電源をオンにすると(#11)、ゼロクロス信号Szが生成され(#12)、これに基づいて初期の繰返しパターンPrが生成される(#13)。操作者の入力などによって、基準電圧値verおよび基準周波数frが取得される(#14)。
【0164】
初期の処理が終わると、次に、ゼロクロス信号Szが生成され(#15)、ノイズの影響を取り除いた正しいL幅、H幅、具体的にはLow信号またはHigh信号などの正しいエッジを検出する(#16)。正しいL幅、H幅に基づいて、電圧値veおよび周波数fを求め(#17)、求めた電圧値veおよび周波数fにしたがって補正された位相角によって位相制御が行われる(#18)。
【0165】
また、正しいL幅、H幅に基づいて、繰返しパターンPrが更新される(#19)。
【0166】
以下、詳しいフローチャートに基づいて説明する。
【0167】
図14および図15は、画像形成装置1の電源投入時の動作の一例を示すフローチャートである。
【0168】
画像形成装置1の電源を投入した際には、交流電圧Vに基づいてゼロクロス信号Szが生成される。生成されたゼロクロス信号Szにおいて立下りエッジが検出されると(#101でYes)、時間幅の検出が開始される(#102)。
【0169】
ゼロクロス信号Szの立上りが検出されると(#103でYes)、ゼロクロス信号Szが立下ってから立上るまでの時間幅、すなわちL幅が検出されて記憶される(#104)。
【0170】
ゼロクロス信号Szの立上りが検出されると(#105でYes)、ゼロクロス信号Szが立上ってから立下るまでの時間幅、すなわちH幅が検出されて記憶される(#106)。
【0171】
L幅およびH幅がそれぞれ5回以上検出されれば(#107でYes)、これら5つのL幅の平均値であるAveLおよび5つのH幅の平均値であるAveHが算出される。また、5つのL幅と5つのH幅とのすべてが加算され、さらに5で除算されることにより周期Thの平均値であるAveThが算出される(#108)。
【0172】
操作者により入力された交流電圧Vの基準周波数frおよび基準電圧値verが取得される(#109、#110)。基準周波数frおよび基準電圧値verは、画像形成装置1を設置した場所における交流電圧Vの周波数および電圧値とされる値である。交流電圧Vは、実際には、これらの値に固定されているわけではなく変動することがある。
【0173】
平均値AveThに基づいて、交流電圧Vの周波数であるAC周波数(周波数f)が算出される(#111)。
【0174】
基準周波数frとAC周波数とが比較され(#112)、これらが一致しない場合(#112でNo)には初期補正が算出されて取得され(#113)、基準周波数frがAC周波数とされる(#114)。
【0175】
取得された初期補正は、位相制御におけるオフタイマーの設定値に反映される。初期補正は、基準周波数frの半サイクル分の時間をAveThに基づいて算出された周波数の半サイクル分の時間で除算することで算出される。例えば基準周波数が50Hzならば半サイクル分の時間は10msである。AveThに基づいて算出された周波数が55Hzならば、半サイクル分の時間は9.09msである。このとき、初期補正は10ms/9.09msとなる。そして、この初期補正を位相制御におけるオフタイマーの設定値に積算すればよい。
【0176】
基準周波数frとAC周波数とが一致する場合(#112でYes)は、#113および#114が行われない。
【0177】
AveHが正常H幅として取得され(#115)、AveLが正常L幅として取得される(#116)。
【0178】
繰返しパターンPrのLow信号Lの幅(以下、繰返しパターンL幅という)としてAveLが記憶され、繰返しパターンPrのHigh信号Hの幅(以下、繰返しパターンH幅という)としてAveHが記憶され、繰返しパターンPrの周期(以下、繰返しパターンThという)としてAveThが記憶される(#117)。
【0179】
待機中制御およびゼロクロス信号の重なり監視制御で用いられる重なりフラグがクリアされ(#118)、一時H幅がクリアされる(#119)。待機中制御が起動する(#120)。
【0180】
図16および図17は画像形成装置1の待機中制御の第1動作を示すフローチャートである。
【0181】
まず、ゼロクロス信号Szの立上りエッジが検出されると(#201でYes)、L幅が検出され、記憶される(#202)。このL幅についてL幅の判定処理がなされる(#203)。
【0182】
L幅の判定処理によりL幅が本物(正しい)であると判定された場合(#204で本物)には、今回検出されたL幅が正常L幅として取得される(#205)。
【0183】
現在のAveLと正常L幅との平均値が算出され、AveLがこの値に更新される(#206)。
【0184】
H幅の検出に向けて一時H幅が初期化され(#207)、待機中制御の第2動作が行われる(#208)。
【0185】
L幅の判定処理によりL幅が偽物(ノイズ)であると判定された場合(#204で偽物:ノイズ)は、ヒーターの位相制御が行われているか確認される(#209)。ヒーターの位相制御中でなければ(#209でNo)待機中制御の第2動作が行われる(#208)。ヒーターの位相制御中であれば(#209でYes)、ヒーターリモート信号Shがオンしているか確認される(#210)。
【0186】
ヒーターリモート信号Shがオンしていなければ(#210でNo)、待機中制御の第2動作が行われる(#208)。ヒーターリモート信号Shがオンしていれば(#210でYes)、L幅がノイズ補正量として取得(#211)されてから、待機中制御の第2動作が行われる(#208)。
【0187】
ノイズと判定されたL幅はノイズ補正量として、次回の半サイクルにおけるオフタイマーの設定値から減算される。つまり、今回の半サイクルにおいては、ノイズが生じたことによりノイズによるL幅分だけヒーター114に供給すべき電力が減少したことになる。そこで、その分だけ次回の半サイクルでは多めに電力をヒーター114に供給する。次回の半サイクルのオフタイマーの設定値からノイズ補正量を減算することにより、ヒーター114への電力供給時間が増加する。
【0188】
L幅の判定処理によりL幅が偽物(重なり)であると判定された場合(#204で偽物:重なり)は、ヒーターの位相制御が行われているかについて確認される(#213)。ヒーターの位相制御中でなければ(#213でNo)、待機中制御の第2動作が行われる(#208)。ヒーターの位相制御中であれば(#212でYes)、今回検出したL幅から正常L幅を減算することで重なり差分が算出され(#213)、残りH幅と重なり差分とが比較される(#214)。
【0189】
重なり差分が残りH幅よりも大きい場合(#214でYes)は、重なり差分から残りH幅が減算されて(#215)、その値がオフタイマーの設定値に加算され(#216)、待機中制御の第2動作が行われる(#208)。
【0190】
重なり差分が残りH幅以下である場合(#214でNo)は、残りH幅から重なり差分が減算されて(#217)、その値がオフタイマーの設定値から減算され(#218)、待機中制御の第2動作が行われる(#208)。
【0191】
L幅が偽物(重なり)であると判定された場合には、ゼロクロス信号Szの立下りから残りH幅時間経過後にヒーターリモート信号Shがオフとなる。重なり差分が残りH幅よりも大きい場合は、電力の供給量が増加することを抑制するために、オフタイマーの設定値を増加させる。また、重なり差分が残りH幅以下である場合は、電力の供給量が減少することを抑制するために、オフタイマーの設定値を減少させる。
【0192】
待機中制御の第2動作について説明する。待機中制御の第2動作は図16の#208で行われる。
【0193】
図18は画像形成装置1の待機中制御の第2動作を示すフローチャートである。
【0194】
まず、ゼロクロス信号Szの立下りエッジが検出されると(#301でYes)、H幅が検出される(#302)。
【0195】
H幅の判定処理がなされる(#303)。
【0196】
H幅の判定処理によりH幅が本物であると判定された場合(#304で本物)には、現在の一時H幅が正常H幅として取得される(#305)。
【0197】
現在のAveHと正常H幅との平均値が算出され、AveHがこの値に更新される(#306)。AveLとAveHとが加算されて、AveThがこの値に更新される(#307)。
【0198】
AveLが繰返しパターンL幅として更新され、AveHが繰返しパターンH幅として更新され、AveThが繰返しパターンThとして更新される(#308)。このように、繰返しパターンL幅、H幅、Thが更新される。
【0199】
ヒーターの位相制御が要求されているか確認され(#309)、ヒーターの位相制御が要求されていなければ(#309でNo)、待機中制御の第2動作を終了して図16の#201が行われる。
【0200】
ヒーターの位相制御が要求されていれば(#309でYes)、ヒーターの位相制御を行って(#310)、待機中制御の第2動作を終了して図16の#201が行われる。
【0201】
H幅の判定処理によりH幅が偽物であると判定された場合(#304で偽物)には、ヒーターの位相制御が行われているかについて確認される(#311)。
【0202】
ヒーターの位相制御中でなければ(#311でNo)、待機中制御の第2動作を終了して図16の#201が行われる。
【0203】
ヒーターの位相制御中であれば(#311でYes)、残りH幅が算出される(#312)。残りH幅は繰返しパターンThから後述する#502で算出した一時Thを減算することで算出される。
【0204】
残りH幅が正常L幅よりも大きい場合(#313でNo)には、待機中制御の第2動作を終了して図16の#201が行われる。
【0205】
残りH幅が正常L幅以下である場合(#313でYes)には、ゼロクロス信号Szの重なり監視制御を行って(#314)から、待機中制御の第2動作を終了して図16の#201が行われる。
【0206】
ヒーターの位相制御を行って(#310)、待機中制御の第2動作を終了して図16の#201が行われる。
【0207】
L幅判定処理について説明する。L幅判定処理は図16の#203で行われる。
【0208】
図20〜図22は、画像形成装置1のL幅判定処理の動作を示すフローチャートである。
【0209】
現在の一時H幅とL幅とを加算して得られた値が、新たな一時H幅として更新される(#401)。この一時H幅が一時Thとして取得される(#402)。今回のL幅と繰返しパターンL幅とが比較される(#403)。
【0210】
今回のL幅と繰返しパターンL幅とが一致するならば(#403でYes)、繰返しパターンThと一時Thとが比較される(#404)。
【0211】
繰返しパターンThと一時Thとが一致すれば(#404でYes)、今回のL幅は本物であると判断される(#405)。
【0212】
繰返しパターンThと一時Thとが一致しないならば(#404でNo)、H幅率とL幅率とが変動していないか判断される(#413)。
【0213】
具体的には、((一時Th−今回L幅)/一時Th)と(今回L幅/一時Th)とのそれぞれが、(AveH/AveTh)と(AveL/AveTh)と比べて変動しているか判断され、これらが変動していればH幅率とL幅率とが変動している。
【0214】
H幅率とL幅率とが変動していない場合(#413でYes)は、交流電圧Vの周波数が変動したと判断され(#414)、周波数補正が取得される(#415)。例えば、周波数補正は(一時Th/繰返しパターンTh)となる。
【0215】
そして、今回のL幅は本物であると判断される(#405)。
【0216】
今回のL幅と繰返しパターンL幅とが一致しない場合(#403でNo)は、繰返しパターンThと一時Thとが比較される(#406)。
【0217】
繰返しパターンThと一時Thとが一致する場合(#406でYes)は、交流電圧Vの周波数は変動せずに電圧値が変動していると判断され(#407)、電圧値補正が算出される(#408)。例えば、電圧上昇であり変動率が8%であれば、電圧値補正は1.08である。電圧下降であり変動率が10%であれば、電圧値補正は0.9である。
【0218】
そして、今回のL幅は本物であると判断される(#409)。
【0219】
繰返しパターンThと一時Thとが一致しない場合(#406でNo)は、H幅率とL幅率とが変動していないか判断される(#410)。
【0220】
具体的には、((一時Th−今回L幅)/一時Th)と(今回L幅/一時Th)とのそれぞれが、(AveH/AveTh)と(AveL/AveTh)と比べて変動しているか判断され、これらが変動していればH幅率とL幅率とが変動している。
【0221】
H幅率とL幅率とが変動していない場合(#410でYes)は、交流電圧Vの周波数が変動したと判断され(#411)、周波数補正が算出される(#412)。例えば、周波数補正は、(一時Th/繰返しパターンTh)となる。
【0222】
そして、今回のL幅は本物であると判断される(#409)。
【0223】
#413でH幅率とL幅率とが変動している場合(#413でNo)および#410でH幅率とL幅率とが変動している場合(#410でNo)は、重なりノイズフラグがオンしているか判断される(#416)。重なりノイズフラグがオンしている場合は(#416でYes)、重なりフラグをクリアし(#417)、重なりが発生していると判断される(#418)。そして、今回のL幅は偽物であり、重なりが生じていると判定される(#419)。
【0224】
重なりノイズフラグがオンしていない場合(#416でNo)は、ノイズが発生していると判断され(#420)、今回のL幅は偽物であると判定される(#421)。
【0225】
H幅判定処理について説明する。H幅判定処理は図18の#303で行われる。
【0226】
図23は画像形成装置1のH幅判定処理の動作を示すフローチャートである。
【0227】
現在の一時H幅と今回検出されたH幅とを加算して得られた値が、新たな一時H幅として更新される(#501)。この一時H幅と正常L幅とを加算して一時Thが算出される(#502)。
【0228】
一時H幅と繰返しパターンH幅とが比較される(#503)。
【0229】
一時H幅と繰返しパターンH幅とが一致するならば(#503でYes)、一時Thと繰返しパターンThとが比較される(#504)。
【0230】
一時Thと繰返しパターンThとが一致すれば(#504でYes)、今回検出されたH幅の立下りエッジは本物であると判断される(#505)。
【0231】
一時Thと繰返しパターンThとが一致しないならば(#504でNo)、H幅率とL幅率とが変動していないか判断される(#513)。
【0232】
具体的には、((一時Th−正常L幅)/一時Th)と(今回L幅/一時Th)とのそれぞれが、(AveH/AveTh)と(AveL/AveTh)と比べて変動しているか判断され、これらが変動していればH幅率とL幅率とが変動している。
【0233】
H幅率とL幅率とが変動していない場合(#513でYes)は、交流電圧Vの周波数が変動したと判断され(#514)、周波数補正が取得される(#515)。例えば、周波数補正は、(一時Th/繰返しパターンTh)となる。
【0234】
そして、今回のH幅の立下りエッジは本物であると判断される(#505)。
【0235】
一時H幅と繰返しパターンH幅とが一致しない場合(#503でNo)は、繰返しパターンThと一時Thとが比較される(#506)。
【0236】
繰返しパターンThと一時Thとが一致する場合(#506でYes)は、交流電圧Vの周波数は変動せずに電圧値が変動していると判断され(#507)、電圧値補正が算出される(#508)。例えば、電圧上昇であり変動率が8%であれば、電圧値補正は1.08である。電圧下降であり変動率が10%であれば、電圧値補正は0.9である。そして、今回のH幅の立下りエッジは本物であると判断される(#509)。
【0237】
繰返しパターンThと一時Thとが一致しない場合(#506でNo)は、H幅率とL幅率とが変動していないか判断される(#510)。
【0238】
具体的には、((一時Th−正常L幅)/一時Th)と(正常L幅/一時Th)とのそれぞれが、(AveH/AveTh)と(AveL/AveTh)と比べて変動しているか判断され、これらが変動していればH幅率とL幅率とが変動している。
【0239】
H幅率とL幅率とが変動していない場合(#510でYes)は、交流電圧Vの周波数が変動したと判断され(#511)、周波数補正が算出される(#512)。例えば、周波数補正は、(一時Th/繰返しパターンTh)となる。
【0240】
そして、今回のH幅の立下りエッジは本物であると判断される(#509)。
【0241】
#513でH幅率とL幅率とが変動している場合(#513でNo)および#510でH幅率とL幅率とが変動している場合(#510でNo)は、今回のH幅の立下りエッジはノイズであり偽物であると判断される(#516)。
【0242】
ヒーター114の位相制御の動作について説明する。ヒーター114の位相制御の動作は、図18の#310および図27の#806で行われる。
【0243】
図25は画像形成装置のヒーター114の位相制御の動作を示すフローチャートである。図18の#310の動作である。
【0244】
位相制御はヒーター114に通電を開始するときまたは通電を停止するときに行われる。位相制御は、ゼロクロス信号Szの本物の立下りエッジに同期する。
【0245】
位相制御における交流電圧Vの半サイクル毎のヒーター114のオフおよびオンの時間の割合を示したデータにしたがって位相制御が行われる。
【0246】
このようなデータに基づいて位相制御がなされている場合に、データのすべてが適用され位相制御が完了した場合(#601でYes)は位相制御の種類が確認される(#602)。
【0247】
位相制御がスルーアップ制御であった場合は、ヒーターリモート信号Shがオン(#603)となりヒーター114には全電力が供給される。
【0248】
位相制御がスルーダウン制御であった場合は、ヒーターリモート信号Shがオフ(#604)となりヒーター114には電力が供給されない。
【0249】
位相制御に関するデータがすべて完了しておらず、位相制御が完了していない場合(#601でNo)は、現在のAC周波数が取得される(#605)。
【0250】
さらに初期補正が取得され(#606)、周波数補正が取得され(#607)、電圧値補正が取得され(#608)、ノイズ補正が取得される(#609)。これらの取得された補正データはオフタイマーの設定値の補正に用いられる。
【0251】
これら補正データは、電源オン時の初期補正、交流電圧Vの周波数が変動したとときの周波数補正、交流電圧Vの電圧値が変動したとときの電圧値補正、ヒーターリモート信号Shのオン中にゼロクロス信号にノイズが生じたためにヒーター114への電力供給が遮断されたときのノイズ補正である。
【0252】
位相制御の種類が確認される(#602)。
【0253】
位相制御がスルーアップ制御であった場合は、スルーアップ用のデータが取得され(#611)、位相制御がスルーダウン制御であった場合は、スルーダウン用のデータが取得される(#612)。
【0254】
ヒーター114がオンされるまでの時間であるヒーターリモートオフ時間(オフタイマーの設定値)が算出される(#613)。
【0255】
例えばオフタイマーの設定値は、
((AC周波数の半波分の時間)×(ヒーターOFF割合)×(初期補正)×(周波数補正)×(電圧補正))−(ノイズ補正)
により算出される。
【0256】
周波数補正が初期化され(#614)、電圧値補正が初期化され(#615)、ノイズ補正が初期化される(#616)。
【0257】
ヒーターリモート信号Shがオフとされ(#617)、上記算出された時間の経過後にオンされてヒーター114の位相制御がなされる。
【0258】
図26は画像形成装置1のヒーター114のオン制御の動作を示す。これは、図25の#618により起動させられる。
【0259】
この動作が開始されると、算出されたオフタイマーの設定値の経過後にヒーター114の出力がオンさせられる(#701)。
【0260】
ゼロクロス信号Szの重なり監視制御の動作について説明する。ゼロクロス信号Szの重なり監視制御は図19の#314で行われる。
【0261】
図27は画像形成装置1のゼロクロス信号Szの重なり監視制御の動作を示すフローチャートである。
【0262】
図19の#312で算出された残りH幅分の時間が経過したかが判断される(#801)。
【0263】
残りH幅分の時間が経過していない場合(#801でNo)において、立上りエッジが検出されなければ(#802でNo)#801に戻り、立上りエッジが検出されれば(#802でYes)図16の#202が行われる。
【0264】
残りH幅分の時間が経過している場合(#801でYes)において、立上りエッジが検出されれば(#803でYes)、図16の#202が行われる。
【0265】
残りH幅分の時間が経過している場合(#801でYes)において、立上りエッジが検出されなければ(#803でNo)、ヒーターリモート信号Shがオフされる(#804)。
【0266】
ヒーター114の位相制御が要求されていれば(#805でYes)、ヒーター114の位相制御が行われ(#806)、重なりノイズフラグがオンとされる(#807)。
【0267】
ヒーター114の位相制御が要求されていなければ(#805でNo)、重なりノイズフラグがオンとされる(#807)。
【0268】
本実施形態に係る画像形成装置1は、上述のように、位相制御中に交流電圧Vの周波数や電圧値が変化しても、オフタイマーの設定値を補正することで好ましい位相制御を行うことができる。
【0269】
また、交流電圧Vにノイズが生じることにより、生じるゼロクロス信号Szのノイズの影響を受けずに好ましい位相制御を行うことができる。
【0270】
上に述べた実施形態において、電力制御部100、および画像形成装置1の全体または各部の構成、構造、形状、寸法、個数、材質、処理内容、処理順序、処理タイミングなどは、本発明の趣旨に沿って適宜変更することができる。
【符号の説明】
【0271】
1 画像形成装置
100 電力制御部
101 ゼロクロス信号生成部
104 信号幅検出部
105 データ記憶部
107 電圧値検出部
108 周波数検出部
109 繰返しパターン検出部
110 正常信号幅検出部
111 補正値検出部(スイッチング制御部)
112 ヒーターリモート生成部(スイッチング制御部)
113 スイッチング部
114 ヒーター(負荷)
200 操作パネル(操作部)
300 制御部
400 交流電源
V 交流電圧
Sz ゼロクロス信号
Sh ヒーターリモート信号
f 周波数
ve 電圧値
fr 基準周波数
ver 基準電圧値
【技術分野】
【0001】
本発明は、電力制御方法、電力制御装置、および画像形成装置に関する。本発明は、複写機、プリンタ、ファクシミリ装置、およびこれらの複合機などの電子写真方式の画像形成装置における電力制御などに利用される。特に、例えば、交流電源の周波数や電圧の変動が大きく、またノイズの多い電源環境にある画像形成装置における定着用ヒーターの電力制御に利用される。
【背景技術】
【0002】
電子写真方式を用いた画像形成装置は、通常、用紙上に形成されたトナー像を熱で溶融して定着させるためにヒーターを備える。近年においては定着用のヒーターが大電力化する傾向にあり、大きな突入電流により電源電圧が低下して同じ電源系統内の蛍光灯にちらつきが生じるなどの悪影響が発生している。また、突入電流によって、ヒーターを駆動制御するためのトランジスタやトライアックなどのスイッチング素子が破壊されるおそれがある。
【0003】
このような問題を解決するために、ヒーターへの通電初期において通電電流を徐々に増加させるスルーアップ制御が行われる。スルーアップ制御では、交流の各半サイクルにおいてスイッチング素子がオンする位相角を制御し、オンとなる導通角φを0からπまで徐々に増大させる。これによって、ヒーターをできるだけ速く暖めることができ、しかも突入電流を抑えることができる。また、必要に応じて、ヒーターへの通電終了時において通電電流を徐々に減少させるスルーダウン制御が行われる。このような位相制御によって、安定してヒータの温度制御を行うことができる。
【0004】
ところで、画像形成装置が設置されている電源環境が悪く、例えば電源配線のインピーダンスが高くなってしまっている場合に、位相制御におけるヒーターのオンのタイミングで画像形成装置に対する入力電圧の電圧降下がノイズとして発生する。
【0005】
その場合に、位相制御に用いるゼロクロス信号が本来のゼロクロスポイントではないタイミングで誤って出力されてしまうことがある。そうすると、誤ったゼロクロス信号に同期して位相制御が実行されるため、本来の位相制御を安定して実行できなくなる。そのような場合に、装置の誤動作を起こす可能性が高いことから、電源異常と判断して装置を停止させることがある。
【0006】
このような問題に関連して、入力交流電源のゼロクロスパルスの幅が所定範囲未満の場合は電源ノイズによる異常と判断し、所定範囲以上の場合には電源瞬断による異常と判断することなどが提案されている(特許文献1)。
【0007】
また、ノイズによって発生したゼロクロス割込みを無視してヒーターの誤動作を防ぐために、ヒーターの制御信号の立ち上がりから設定時間Tの間はゼロクロス信号の立ち上がりを無視することが提案されている(特許文献2)。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2007−064892号公報
【特許文献2】特開2009−204638号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかし、特許文献1、2などの従来技術による場合には、電源ノイズがゼロクロスパルス幅の所定範囲内に入ってしまって正しいゼロクロス信号と誤認識してしまった場合、または正しいゼロクロス信号と電源ノイズとが重なってしまった場合に、正しいゼロクロス信号を検出することができない。
【0010】
また、上に述べたように、画像形成装置の設置環境によっては、交流電源が不安定なため電圧や周波数の変動が起こってしまい、ゼロクロス信号の波形が変動して電源ノイズが発生することがある。そうすると、誤ったゼロクロス信号が発生する期間として所定の期間を決めておいても、電圧や周波数が変動すればこの期間も変動する可能性があり、正常なゼロクロス信号を検出することができなくなる。
【0011】
本発明は、上述の事情に鑑みてなされた発明であり、交流電源の電圧や周波数が変動する場合でも当該変動に対応した位相制御を行い、不具合の生じにくい位相制御を行えるようにすることを目的とする。
【課題を解決するための手段】
【0012】
本発明に係る電力制御方法は、交流電源から供給される交流電力を用いて位相制御を行う電力制御方法であって、前記交流電源からの交流電圧の絶対値が所定の値以下であることに対応して第1レベルを示し前記交流電圧の絶対値が所定の値より大きいことに対応して第2レベルを示すゼロクロス信号を生成し、前記ゼロクロス信号における、前記交流電圧の絶対値が所定の値以下である際の時間幅であるゼロクロス幅および前記交流電圧の絶対値が所定の値以上である際の時間幅である非ゼロクロス幅を検出し、前記検出したゼロクロス幅および前記検出した非ゼロクロス幅に基づいて、前記交流電圧の周波数および電圧値を検出し、前記検出した周波数および電圧値に応じて位相制御を行う。
【0013】
好ましくは、ノイズが生じていない状態の前記交流電圧における前記ゼロクロス幅および前記非ゼロクロス幅に基づいて生成された、基準となるゼロクロス幅である基準ゼロクロス幅および基準となる非ゼロクロス幅である基準非ゼロクロス幅と、前記検出したゼロクロス幅および前記検出した非ゼロクロス幅とを用いて、ノイズの影響を受けない前記ゼロクロス幅およびノイズの影響を受けない前記非ゼロクロス幅を検出し、前記検出したノイズの影響を受けないゼロクロス幅および前記検出したノイズの影響を受けない非ゼロクロス幅に基づいて、前記周波数および前記電圧値を検出し、前記検出した周波数および電圧値に応じて前記位相制御を行う。
【発明の効果】
【0014】
本発明によると、交流電源の電圧が変動する場合でも当該変動に対応した位相制御を行い、不具合の生じにくい位相制御を行うことができる。
【図面の簡単な説明】
【0015】
【図1】本発明の実施形態に係る画像形成装置の構成を示す図である。
【図2】画像形成装置における電力制御に関係する部分のブロック図である。
【図3】ゼロクロス信号の生成方法を説明するための図である。
【図4】電力制御部による全体的な制御における各部の波形を示す図である。
【図5】交流電源にノイズが乗った場合の各部の波形を示す図である。
【図6】スルーアップ制御などにおける待機時間のデータを示す図である。
【図7】ノイズにより生じる誤ったゼロクロス信号の例を示す図である。
【図8】正しいゼロクロス信号および繰返しパターンの例を示す図である。
【図9】ゼロクロス信号から正しいLow信号などを検出する処理を示す図である。
【図10】ゼロクロス信号から正しいLow信号などを検出する処理を示す図である。
【図11】周波数および電圧値を算出するためのデータの例を示す図である。
【図12】スルーアップ制御などのためのデータの例を示す図である。
【図13】電力制御部における電力制御の概略の流れが示されている。
【図14】電源投入時の動作を示す第1のフローチャートである。
【図15】電源投入時の動作を示す第2のフローチャートである。
【図16】待機中制御の第1動作を示す第1のフローチャートである。
【図17】待機中制御の第1動作を示す第2のフローチャートである。
【図18】待機中制御の第2動作を示す第1のフローチャートである。
【図19】待機中制御の第2動作を示す第2のフローチャートである。
【図20】L幅判定処理の動作を示す第1のフローチャートである。
【図21】L幅判定処理の動作を示す第2のフローチャートである。
【図22】L幅判定処理の動作を示す第3のフローチャートである。
【図23】画像形成装置のH幅判定処理の動作を示す第1のフローチャートである。
【図24】画像形成装置のH幅判定処理の動作を示す第2のフローチャートである。
【図25】ヒーターの位相制御の動作を示すフローチャートである。
【図26】ヒーターのオン制御の動作を示すフローチャートである。
【図27】ゼロクロス信号の重なり監視制御の動作を示すフローチャートである。
【発明を実施するための形態】
【0016】
〔画像形成装置の構成〕
図1には、本実施形態に係る画像形成装置1の構成の例が示されている。
【0017】
図1において、画像形成装置1は、タンデム型のプリントエンジンを内蔵した電子写真方式のフルカラー画像形成装置である。画像形成装置1は、一般に複合機またはMFP(Multi Function Peripherals)と呼ばれる装置であって、コピー、ネットワークプリンティング(PCプリント)、ファックス、およびスキャナなどの機能を集約した装置である。
【0018】
画像形成装置1は、画像読取部10、画像形成部(プリンタ部)20、用紙搬送部30、および用紙格納部40などを備える。
【0019】
画像読取部10は、原稿をセットするための載荷台3、原稿台ガラス11、載荷台3にセットされた原稿を原稿台ガラス11に自動的に1 枚ずつ搬送する搬送装置2、および画像が読取られた原稿を排出するための排出台4を有する。また、画像読取部10は図示していないスキャナを含む。
【0020】
スキャナは、原稿を照射する露光ランプ、原稿からの反射光の向きを変える反射ミラー、反射ミラーからの光路を変えるミラー、反射光を集光するレンズ、および受光した反射光に基づいて電気信号を発生する3列のCCD(Charge Coupled Device )などの光電変換素子を有する。電気信号は画像形成部30に送られる。
【0021】
載荷台3に設置された原稿は、搬送装置2によって搬送されて原稿台ガラス11上にセットされる。スキャナはスキャンモータによって原稿台ガラス11に対して平行移動し、原稿台ガラス11上にセットされた原稿の画像を露光走査する。
【0022】
画像形成部20は、電子写真方式によって用紙上に画像を形成するものであって、トナー像が転写される中間転写ベルト31、ローラー32、33、34、作像部21Y、21M、21C、21K、各作像部に対応する転写ローラー25Y、25M、25C、25K、および、クリーニング装置29を備える。
【0023】
作像部は、それぞれY(イエロー)、M(マジェンダ)、C(シアン)、K(ブラック)の4色にそれぞれ対応した作像部21Y、21M、21C、21Kから構成されている。作像部21Y、21M、21C、21Kは、この順で中間転写ベルト31に沿って配置されている。各作像部21Y、21M、21C、21Kは、それぞれ、感光体ドラム22Y、22M、22C、22Kおよび現像器23Y、23M、23C、23Kを備える。
【0024】
現像器23Y、23M、23C、23Kは、静電潜像が形成された感光体ドラム22Y、22M、22C、22Kの表面に形成された潜像を各色のトナーで現像する。
【0025】
クリーニング装置29は、二次転写後に中間転写ベルト31上に残留するトナーを除去する。
【0026】
中間転写ベルト31は、ローラー32、33、34によって弛まないように支持され、これらローラーが回転駆動することによって矢印M2方向に走行する。トナー像が形成された感光体ドラム22Y、22M、22C、22Kは、転写ローラー25Y、25M、25C、25Kと対向し、それらの間を中間転写ベルト31が走行する。これにより、中間転写ベルト31の表面には、各色のトナー像(トナー画像)が、順次、転写位置が互いに合うように重なって転写(一次転写)される。
【0027】
用紙格納部40は、印刷媒体である用紙を収納する給紙カセット41、給紙カセット41から用紙を取り出すピックアップローラー42、および搬送ローラー43を備える。
【0028】
用紙搬送部30は、二次転写ローラー35、定着装置36、ローラー37、および排紙トレイを備える。
【0029】
ピックアップローラー42が、給紙カセット41に収納されている用紙を1枚ずつ取り出し、搬送ローラー43が用紙を搬送路HRへと送る。搬送路HRへと送られた用紙YSは矢印M1方向に搬送される。
【0030】
用紙は、中間転写ベルト31の走行と同期して搬送され、転写ニップ部において、トナー像が形成された中間転写ベルト31と接する。二次転写ローラー35にバイアス電圧が加えられることで、中間転写ベルト31上に形成されたトナー像が用紙上に転写(二次転写)される。二次転写によってトナー像が転写された用紙は、定着装置36に送られる。中間転写ベルト31上に残留するトナーはクリーニング装置29により除去される。
【0031】
定着装置36は、互いに対向配置されニップ部を形成する2つのローラーを有する。ローラーの一方は内蔵したヒーターにより加熱される。
【0032】
トナー像が形成された用紙YSは、定着装置36のニップル部において加熱される。加熱によりトナーが溶融し、トナー像が用紙に定着する。なお、ローラーの内部に設置された熱源(ヒーター)については図示していない。熱源としては、例えばハロゲンヒーターなどを用いればよい。
【0033】
トナー像が定着された用紙は、搬送路HR上を搬送され、ローラー37により排紙トレイ38上に排出される。
〔画像形成装置1の電力制御〕
次に、画像形成装置1における電力制御について説明する。
【0034】
図2には、画像形成装置1における定着用のヒーターへの電力制御に関係する部分の説明のためのブロック図が示されている。
【0035】
図2において、画像形成装置1は、制御部(システムコントローラ部)300、操作パネル200、電力制御部100、および、交流負荷の1つであるヒーター114を備える。
【0036】
画像形成装置1は、交流電源400に接続されている。交流電源400は、商用の交流電力を画像形成装置1に供給する。画像形成装置1に供給された交流電力は、電力制御部100を介してヒーター114に供給される。
【0037】
制御部300は、例えば、CPU、MPU、ROM、RAM、インターフェース回路、その他の周辺回路またはハードウエア回路などを用いて構成され、画像形成装置1の各部に指令を出して動作を制御する。つまり、制御部300は、各部の動作状態を各部からの信号などにより把握し、各部の動作を全体的に管理し、統括する。
【0038】
操作パネル200は、操作者が画像形成装置1に動作の指示を与え、または設定の入力を行うためのものであり、各種ボタンや表示装置などを備えている。操作者は、操作パネル200により、画像形成装置1の設置場所における交流電源の基準周波数frおよび基準電圧値(基準実効値)verを入力できる。基準周波数frおよび基準電圧値verとは、画像形成装置1の設置されている場所の交流電源400から供給されているとされる周波数fおよび電圧値ve、つまり、公称の周波数および電圧値である。
【0039】
なお、基準周波数frおよび基準電圧値verを操作者が入力するのではなく、適当な検出回路により取得し、または適当なサーバから通信回線を介して取得するようにしてもよい。
【0040】
ヒーター114は、定着装置36のローラーの内部に装着されてローラーを加熱する。ヒーター114は、本実施形態においてはハロゲンヒーターが用いられるが、これ以外に、カーボンヒーター、電熱線、セラミックヒーター、または誘導加熱(IH:Induction Heating )コイルなどを用いることも可能である。
【0041】
電力制御部100は、本実施形態においては、画像形成部20における電力制御を実行する。
【0042】
すなわち、電力制御部100は、交流電源400からの交流電圧の絶対値が所定の値以下であることに対応して第1レベルを示し交流電圧の絶対値が所定の値より大きいことに対応して第2レベルを示すゼロクロス信号Szを生成する。
【0043】
ゼロクロス信号Szとして、例えば第1レベルをLレベルとし第2レベルをHレベルとした2値信号とすることが可能である。LレベルとHレベルとは相対的なものであるから、正負極のいずれをLまたはHとしてもよい。
【0044】
そして、ゼロクロス信号Szにおける、交流電圧の絶対値が所定の値以下である際の時間幅であるゼロクロス幅、および、交流電圧の絶対値が所定の値以上である際の時間幅である非ゼロクロス幅を検出する。さらに、検出したゼロクロス幅および検出した非ゼロクロス幅に基づいて、交流電圧の周波数および電圧値を検出する。検出した交流電圧の周波数および電圧値に応じて、位相制御を行う。
【0045】
例えば、交流電源400からの電圧波形に基づいて、交流の半サイクルごとのゼロクロス信号Szを生成し、ゼロクロス信号Szを元にして、Low信号の時間幅であるL幅(ゼロクロス幅)と、High信号の時間幅であるH幅(非ゼロクロス幅)とを検出する。
【0046】
これらL幅およびH幅、またはこれらの和である周期Thに基づいて、交流電源400の周波数fおよび電圧値veを求める。また、L幅およびH幅についてのエッジ間隔が検出され、この検出結果に基づいて内部タイマを起動し、内部タイマのタイムアップをトリガとしてヒーターリモート信号Shを生成し、ヒーター114の位相制御を行う。詳しくは後述する。
【0047】
電力制御部100は、ゼロクロス信号生成部101、信号幅検出部104、データ記憶部105、電圧値検出部107、周波数検出部108、繰返しパターン検出部109、正常信号幅検出部110、補正値検出部111、ヒーターリモート生成部112、およびスイッチング部113を備えている。電力制御部100は、例えば、CPU、MPU、RAM、ROM、I/O素子、その他の電子回路素子または電子回路などにより構成される。
【0048】
ゼロクロス信号生成部101は、交流電源400からの交流電圧Vに基づいてゼロクロス信号Szを生成する。
【0049】
図3は、ゼロクロス信号Szの生成方法を説明するための図であり、上段には交流電圧Vが、下段にはゼロクロス信号Szが示されている。
【0050】
ゼロクロス信号生成部101は、交流電圧Vの絶対値が所定の値以下である場合にLow信号を出力し、それ以外の場合にはHigh信号を出力することでゼロクロス信号Szを生成する。このように、ゼロクロス信号Szは、交流電圧Vが所定の値以下か所定の値以上かで、LowかHighかが決まる。なお、本実施形態では交流電圧Vの絶対値が30V以下である場合にはLowとなる。ゼロクロスポイントZpは、Low信号Lの時間幅であるL幅(ゼロクロス幅)の中心に位置する。
【0051】
なお、スルーアップまたはスルーダウンなどの位相制御が行われている状態では、交流電圧Vにノイズが乗っている可能性があるので、位相制御が行われている状態で生成されるゼロクロス信号Szには誤ったLow信号Lが含まれている可能性がある。これに対する処理方法については後で述べる。
【0052】
なお、ゼロクロス信号SzにおけるLow信号LとHigh信号とを逆にし、ゼロクロスポイントにおいてHigh信号となるようにしてもよい。
【0053】
信号幅検出部104は、ゼロクロス信号SzのLow信号Lの時間幅であるL幅(ゼロクロス幅)と、High信号Hの時間幅であるH幅(非ゼロクロス幅)とを検出する。具体的には、ゼロクロス信号Szの立下りエッジから立上りエッジの間隔および立上りエッジから立下りエッジの間隔を検出する。
【0054】
データ記憶部105は、正常信号幅検出部110において検出した正しいL幅およびH幅を時系列に沿って記憶していく。また、各値を検出する際に必要となる信号幅検出部104により検出したL幅およびH幅や各繰返しパターンなども記憶する。
【0055】
電圧値検出部107は、正常信号幅検出部110により検出された正しいL幅およびH幅に基づいて、交流電圧Vの電圧値veを検出する。
【0056】
周波数検出部108は、正常信号幅検出部110により検出された正しいL幅およびH幅に基づいて、交流電圧Vの周波数fを検出する。
【0057】
繰返しパターン検出部109は、L幅、H幅、および隣接するL幅とH幅との和である周期Thについて、繰返しパターンPrを検出する。繰返しパターンPrは、ゼロクロス信号Szにおいてノイズにより生じたLow信号Lが含まれていないかを検出(チェック)するために用いられる。
【0058】
繰返しパターンPrは、ゼロクロス信号Szにおけるノイズを含まないL幅、H幅、および周期Thの、それぞれの平均値の全体である。なお、L幅、H幅、および周期Thについて、それぞれを繰返しパターンPrということもある。
【0059】
つまり、繰返しパターンPrは、ノイズが生じていない状態の交流電圧Vcにおけるゼロクロス幅および非ゼロクロス幅に基づいて生成された、基準となるゼロクロス幅である基準ゼロクロス幅および基準となる非ゼロクロス幅である基準非ゼロクロス幅を含む。
【0060】
なお、繰返しパターンPrは、画像形成装置1の電源を立ち上げた初期の状態、つまりノイズが発生している可能性が低い状態で得られたゼロクロス信号Szに基づいて、L幅、H幅、および周期Thの各複数個(例えば各5個)の平均値から初期の繰返しパターンPrが生成される。その後に、適時得られたゼロクロス信号Szについて、ノイズを含まないL幅、H幅、および周期Thを含めて平均値を算出し、これによって繰返しパターンPrが更新される。
【0061】
繰返しパターンPrの例、および繰返しパターンPrの生成方法および更新方法については、後で詳しく説明する。
【0062】
正常信号幅検出部110は、ゼロクロス信号SzのL幅およびH幅のそれぞれが、ノイズに起因しない正しいものか、またはノイズに起因して生じた誤ったものかを判定し、それにより正しいL幅およびH幅を検出する。
【0063】
補正値検出部111は、周波数検出部108により検出された周波数f、および、正常信号幅検出部110により検出された正しいL幅およびH幅に基づいて、交流電圧Vの電圧値(実効値)veを検出する。そして、検出された周波数fおよび電圧値veを、基準周波数frおよび基準電圧値verと比較し、正しい位相制御のための補正値を検出する。
【0064】
なお、本実施形態では、電圧値veとして実効値を用いるが、例えば最大値などのように、実効値でない電圧値を用いてもよい。また、電圧値veは、必ずしも現実の電圧の値を直接に示すものでなくてもよく、電圧の値と関係のあるデータであってもよい。周波数fについても、必ずしも現実の周波数の値を直接に示すものでなくてもよく、周波数の値と関係のあるデータであってもよい。
【0065】
ヒーターリモート生成部112は、スイッチング部113の動作を制御するためのヒーターリモート信号Shを、補正値検出部111で検出された補正値に基づいて生成する。なお、ヒーターリモート生成部112は、制御部300からヒーター114を動作させる指示があった際にヒーターリモート信号Shを生成する。
【0066】
ヒーターリモート信号Shはゼロクロス信号SzのLow信号Lと同期してオフとなり、所定のオフ時間(待機時間)の経過後にオンとなる。待機時間を示すデータTD11は、ヒーターリモート生成部112が保持するか、またはヒーターリモート生成部112が読み込み可能となっている。
【0067】
ヒーターリモート信号Shがオンになると、スイッチング部113がオンしてヒーター114にヒーター電流Ihが流れる。ヒーター電流Ihは交流波形を有することから、半サイクル内でゼロになるが、ゼロになるまで流れ続ける。
【0068】
スイッチング部113は、サイリスタ、双方向タイリスタ、IGBT、その他の位相制御が可能なスイッチング素子などからなり、ヒーターリモート信号Shに基づいてオンまたはオフすることにより、ヒーター114への電力供給を制御する。
【0069】
以下、さらに詳しく説明する。
〔交流電圧その他の信号の波形〕
図4には、電力制御部100による全体的な制御における各部の波形が示され、図5には交流電源400にノイズが乗った場合の各部の波形が示されている。なお、図5において、上段の交流電圧はノイズが乗っていない状態の波形を示し、下方段の交流電圧はノイズが乗った状態の波形を示す。
【0070】
図4において、交流電圧は画像形成装置1における交流負荷であるヒーター114に供給される交流電圧Vを示す。ゼロクロス信号Szは、交流電圧Vにおけるゼロクロスポイントの前後の所定期間においてLowとなり、それ以外の期間はHighとなる信号である。
【0071】
ヒーターリモート信号Shは、ヒーター114に電流の流れる時間を指示する信号である。具体的には、双方向サイリスタなどにより構成されたスイッチング素子のオン/オフを制御する信号である。交流電圧の各半サイクルの始点に対応するゼロクロス信号SzがLowになるのをトリガーとして、所定時間が経過した後にLow(アクティブ)となる。
【0072】
ヒーターリモート信号ShがLowでスイッチング素子がオンとなり、ヒーターに入力電流Ihが流れ始める。ヒーターリモート信号Shは、ゼロクロス信号Szが次にLowとなった時にHighとなり、再び所定時間が経過した後にLowとなる。ヒーターへ114の通電は、ヒーターリモート信号ShがHighになるのとは関係がなく、交流電圧の半サイクルの終点(ゼロ点)ごとに停止する。
【0073】
ゼロクロス信号SzがLowになってから、ヒーターリモート信号ShがLowとなるまでの待機時間(経過時間)は、徐々に変化していく。つまり、スルーアップ制御の場合は、この待機時間が徐々に減少していく。逆に、スルーダウン制御の場合は、この待機時間が徐々に増加していく。
【0074】
それにより、スルーアップ制御においてヒーターへの供給電力は徐々に増加していき、スルーダウン制御においてヒーターへの供給電力は徐々に減少していく。ゼロクロス信号SzがLowになってから、ヒーターリモート信号ShがLowとなるまでの待機時間については、図6に示されている。
【0075】
つまり、図6には、交流電圧の周波数が50Hzの場合と60Hzの場合とについて、スルーアップ制御またはスルーダウン制御における待機時間のデータTD11が示されている。データTD11に示された待機時間は、電力制御部100に設けられた内部タイマに設定される。本実施形態では、内部タイマに設定される時間によって、スイッチング部113における位相角φおよび導通角が可変される。
【0076】
図6において、待機時間は、交流電圧の半サイクルごとに、スルーアップ制御であればTc1からTc13へと順次変化し、スルーダウン制御であればTc13からTc1へと順次変化する。
【0077】
上に述べたように、スルーアップ制御およびスルーダウン制御を行うことによりヒーターを安定して制御することができる。
【0078】
また、交流電圧Vにノイズが生じていない場合は、ゼロクロス信号Szにおいても誤ったLow信号Lが生じることなく、信号幅検出部104により検出したL幅およびH幅は正しい値である。このように正しいL幅およびH幅が検出できれば、これらに基づいて交流電圧Vの周波数だけでなく、電圧値も求めることができる。
【0079】
なお、スルーアップ制御またはスルーダウン制御のためのデータとして、後で説明する図12のデータTD3〜6のような形式を用いることも可能である。
【0080】
図5において、下方段に示す交流電圧Vaは、ヒーターリモート信号Shによりノイズが生じた交流電圧である。交流電圧Vaに基づいてゼロクロス信号Szaが生成される。ゼロクロス信号Szaはノイズを含む信号であり、ゼロクロス信号Szと比べるとわかるように、ゼロクロスポイント(Low信号の状態)が多くなる。
【0081】
ゼロクロス信号SzaのLow信号にはノイズにより生じたものが含まれていることから、ゼロクロス信号Szaに同期させて位相制御を行うと、正しい位相制御が行われない。
【0082】
図7には、ノイズにより生じる誤ったゼロクロス信号Szの例が示されている。
【0083】
図7(A)〜(D)において、それぞれ、正しいLow信号L1、L2以外に、誤ったLow信号が生じている。これらの誤ったLow信号は、正しいLow信号L1およびL2の間であるゼロクロス信号間隔において生じている。
【0084】
図7(A)に示す例では、正しいLow信号L1およびL2の間に、誤ったLow信号Ln1が生じている。このLow信号Ln1が、Low信号として認識されてしまう可能性がある。
【0085】
図7(B)に示す例では、正しいLow信号L2と誤ったLow信号とが重なったことにより、信号幅の大きなLow信号Ln2が生じている。このLow信号Ln2が、1つのLow信号として認識されてしまう可能性がある。
【0086】
図7(C)に示す例では、正しいLow信号L1およびL2の間に、複数の誤ったLow信号Ln3、Ln4、Ln5が生じている。これらLow信号Ln3、Ln4、Ln5が、それぞれLow信号として認識されてしまう可能性がある。
【0087】
図7(D)に示す例では、正しいLow信号L1およびL2の間に、誤ったLow信号が複数生じて、そのうちの1つがLow信号L2と重なったことにより信号幅の大きなLow信号Ln6が生じている。Low信号L1とLow信号Ln6との間に複数の誤ったLow信号Ln7およびLn8が生じている。このLow信号Ln6、Ln7、Ln8が、それぞれLow信号として認識されてしまう可能性がある。
【0088】
そこで、本実施形態の電力制御部100では、ノイズによるこのような誤ったLow信号Ln1〜6が生じた場合でも、それをLow信号として認識してしまうことなく、正しいLow信号L1、L2に基づいて位相制御が行われる。
【0089】
次に、正しいL幅およびH幅を用いて、交流電圧Vの電圧値を求める方法について説明する。
〔ノイズの影響を除去した正しいL幅およびH幅の検出方法〕
まず、ゼロクロス信号Szにおける正しいL幅およびH幅を検出する方法について説明する。
【0090】
図8には、正しいゼロクロス信号Sz、および繰返しパターンPrの例が示されている。
【0091】
図8において、正しいゼロクロス信号Szは、Low信号の幅(L幅)がWl、High信号の幅(H幅)がWh、周期の幅がWtである。
【0092】
また、繰返しパターンPrは、Low信号の幅(L幅)がWL、High信号の幅(H幅)がWH、周期の幅がWTである。
【0093】
そして、ゼロクロス信号生成部101において生成されるゼロクロス信号Szについて、繰返しパターンPrとの比較を行う。Low信号の幅WlとWL、High信号の幅WhとWH、周期の幅WtとWTの差が、それぞれ所定の範囲内である場合にそれが正しいゼロクロス信号Szであると判断し、所定の範囲内でない場合にそれ誤ったゼロクロス信号Szであると判断する。
【0094】
すなわち、次の(1)式の各条件、
|WL−Wl|<α1
|WH−Wh|<α2
|WT−Wt|<α3 ……(1)
が満たされる場合に、それぞれLow信号の幅、High信号の幅、周期の幅が正しいとし、正しいと判断されたLow信号またはHigh信号のタイミングに基づいて位相制御が行われる。
【0095】
また、上の(1)式の条件が満たされない場合に、そのLow信号の幅、High信号の幅、周期の幅は誤っているとし、正しいLow信号またはHigh信号を検出するための処理が続行される。
【0096】
以下、詳しく説明する。まず、L幅の判断方法について説明する。
【0097】
正常信号幅検出部110は、信号幅検出部104により検出された今回のL幅と繰返しパターンPrのL幅WLとを比較する。これらが一致すれば、今回のL幅と前回検出された正しいH幅(一時H幅)とを加算したものを繰返しパターンPrの周期WTと比較する。これらが一致すれば、今回のL幅は正しいと判断する。なお、前回検出された正しいH幅はデータ記憶部105から読み出す。
【0098】
今回のL幅とL幅WLとが一致しない場合は、今回のL幅と前回検出された正しいH幅とを加算したものを周期WTと比較する。これらが一致すれば、今回のL幅は正しいと判断する。一致しない場合は、今回のL幅と前回検出された正しいH幅とにおけるL幅率およびH幅率を算出し、その値が基準周波数frと同じであれば今回のL幅は正しいと判断し、同じでない場合は今回のL幅は誤っていると判断する。
【0099】
また、今回のL幅とL幅WLとの比較において、それらが一致していない場合でも、今回のL幅と前回検出された正しいH幅とを加算したものと周期WTとが一致すれば、今回のL幅は正しいと判断する。一致しない場合は、今回のL幅と前回検出された正しいH幅とにおけるL幅率およびH幅率を算出し、その値が基準周波数frと同じであれば今回のL幅は正しいと判断し、同じでない場合は今回のL幅は誤っていると判断する。
【0100】
L幅が誤っていると判断した場合にはさらにそれら誤ったL信号Lが正しいL信号Lに重なって、1つのL信号Lを形成していないかを判断する。
【0101】
次に、H幅の判定方法について説明する。
【0102】
正常信号幅検出部110は、信号幅検出部104により検出された今回のH幅(一時H幅)と繰返しパターンPrのH幅WHとを比較する。これらが一致すれば、今回のH幅と前回検出された正しいL幅(正常L幅)とを加算したものを周期WTと比較する。これらが一致すれば、今回のH幅は正しいと判断する。なお、前回検出された正しいL幅はデータ記憶部105から読み出す。
【0103】
今回のH幅とH幅WHとが一致しない場合は、今回のH幅と前回検出された正しいL幅とを加算したものを周期WTと比較する。これらが一致すれば、今回のL幅は正しいと判定する。一致しない場合は、今回のH幅と前回検出された正しいL幅とにおけるH幅率およびL幅率を算出し、その値が基準周波数frと同じであれば今回のH幅は正しいと判断し、同じでない場合は今回のH幅は誤っていると判定する。
【0104】
また、今回のH幅とH幅WHとの比較において、それらが一致していない場合でも、今回のH幅と前回検出された正しいL幅とを加算したものと周期WTとが一致すれば、今回のH幅は正しいと判断する。一致しない場合は、今回のH幅と前回検出された正しいL幅とにおけるH幅率およびL幅率を算出し、その値が基準周波数frと同じであれば今回のH幅は正しいと判断し、同じでない場合は今回のH幅は誤っていると判断する。
【0105】
ただし、時間幅が一致するとは、完全に同一の値をとらなくてもよく、多少の誤差分は含んでもよい。また、変動率についても同様に、同じ値とは、完全に同一の値でなくても多少の誤差分は含んでもよい。
【0106】
次に、誤ったゼロクロス信号Szから正しいLow信号またはHigh信号を検出するための具体的な処理について、図9および図10を参照して説明する。
【0107】
図9には、図7(A)に示すゼロクロス信号Szから正しいLow信号またはHigh信号を検出する処理の例が示されている。
【0108】
図9(A)において、Low信号L1の幅Wl1と繰返しパターンPrのLow信号Lの幅WLとが比較される。これらは同じであったので、つまり所定の範囲内であったので、Low信号L1は正しいと判断される。これによって、Low信号L1のタイミング、例えば立ち上がりまたは立ち下がりのタイミングが、必要に応じて、種々の制御のためにリアルタイムで用いられる。
【0109】
次に、High信号の幅Wh1と繰返しパターンPrのHigh信号の幅WHとが比較される。Low信号Ln1はノイズによるものであるので、幅Wh1は幅WHよりも大幅に小さく、上の(1)式の条件は満たされない。したがって、High信号H1は誤ったものと判断され、High信号H1は制御のためには用いられない。
【0110】
次に、図9(B)において、Low信号Ln1の幅Wl2と繰返しパターンPrのLow信号Lの幅WLとが比較される。これらは同じであったとすると、次に、Low信号L1の幅Wl2とHigh信号H1の幅Wh1との合計である周期の幅Wt2と、繰返しパターンPrの周期WTとが比較される。すると、幅Wt2は幅WTよりも大幅に小さく、上の(1)式の条件は満たされない。したがって、Low信号Ln1は誤ったものと判断され、Low信号Ln1は制御のためには用いられない。
【0111】
なお、誤ったものと判断されたHigh信号H1の「幅Wh1」は、正しくない幅であり、次のLow信号L1のチェックに一時的に用いられるものであるので、これを「一時幅」ということがある。また、正しいと判断された幅であっても、次の信号のチェックに一時的に用いられる場合に、これを「一時幅」ということがある。
【0112】
次に、図9(C)において、High信号H2の幅Wh2と周期の幅Wt2との合計である幅Wh3と、繰返しパターンPrのHigh信号の幅WHとが比較される。この例ではこれらが同じであったので、幅Wh3は正しいと判断される。したがって、この時点で、幅Wh3の終点、つまり次のLow信号L2の立ち下がりエッジが、内部タイマーの計時開始のトリガーとして用いられる。
【0113】
次に、図9(D)において、Low信号L2の幅Wl3と繰返しパターンPrのLow信号Lの幅WLとが比較される。これらは同じであったので、Low信号L2は正しいと判断される。
【0114】
つまり、幅Wh3が正しいと判断され、かつ幅Wl3が正しいと判断されたので、Low信号L2は正しいLow信号であることが分かる。
【0115】
なお、High信号の幅とLow信号の幅との合計はその信号の周期の幅に等しいので、これら3つの変数のうち、可能な範囲でいずれか2つの変数を用いてチェックを行えばよい。
【0116】
例えば、図9(D)において、Low信号L2の幅Wl3と繰返しパターンPrのLow信号Lの幅WLとを比較したが、これに代えて、Low信号L2の幅Wl3と幅Wh3との合計である周期Wt4と、繰返しパターンPrの周期WTとを比較してもよい。
【0117】
図10には、図7(B)に示すゼロクロス信号Szから正しいLow信号またはHigh信号を検出する処理の例が示されている。
【0118】
図10(A)において、Low信号L1の幅Wl1と繰返しパターンPrのLow信号Lの幅WLとが比較される。これらは同じであったので、Low信号L1は正しいと判断される。
【0119】
次に、High信号H1の幅Wh1と繰返しパターンPrのHigh信号の幅WHとが比較される。Low信号Ln2はノイズによるものであるので、幅Wh1は幅WHよりも小さく、上の(1)式の条件は満たされない。したがって、High信号H1は誤ったものと判断され、High信号Hは制御のためには用いられない。
【0120】
図10(B)において、繰返しパターンPrの周期WTと、幅Wl1と幅Wh1との合計である周期Wt1との差、つまり残りH幅Wdが算出され、残りH幅Wdと幅WLとが比較される。残りH幅Wdが幅WL以下である場合には、H幅Wh1の次に検出されるL幅Wl2はノイズと正しいLow信号とが重なって生じたLow信号の時間幅である可能性がある。残りH幅Wdが幅WL以下であり、次に検出されるL幅Wl2が誤っていれば、L幅Wl2は、ノイズと正しいLow信号とが重なって生じたLow信号によるものであり、誤ったものと判定される。
【0121】
図10(C)において、Low信号Ln2の幅Wl2と幅WLとが比較される。幅WLが幅Wl2よりも大幅に小さく、上の(1)式の条件は満たされない。したがって、Low信号Ln2は誤ったものと判断される。また、残りH幅Wdが幅WL以下であったことから、Low信号Ln2はノイズと正しいLow信号とが重なって生じた誤った信号であると判断される。
【0122】
Low信号Ln2は、ノイズと正しいLow信号とが重なったものであるため、正しいLow信号の立下りのタイミングを判断することが困難である。そこで、例えば、Low信号Ln2の立下りから残りH幅Wdだけ経過したタイミングを正しいLow信号の立下りのタイミングとする。
【0123】
このように決定したタイミングで、本実施形態においては、内部タイマーが起動され、計時が開始される。
【0124】
なお、内部タイマー(オフタイマーまたはオンタイマー)は、CPU、MPU、またはハードウエア回路によって構成することが可能である。
〔繰返しパターンPr〕
次に、繰返しパターンPrのL幅WL、H幅WH、および周期WTの検出方法について説明する。
【0125】
ヒーター114の位相制御が開始される前の交流電圧Vには、ノイズが生じている可能性が低い。したがって、まず、画像形成装置1の電源を立ち上げた初期において信号幅検出部104により検出されたそれぞれ5回分のL幅およびH幅の平均をとり、この平均値を初期のL幅WL、H幅WHとする。
【0126】
そして、位相制御が開始された後は、正常信号幅検出部110により検出された正しいL幅およびH幅を、それぞれ、L幅WL、H幅WHに加えて変数Kで除する。すなわち、それらの平均値を算出し、その平均値を新しいL幅WL、H幅WHとして更新する。
【0127】
このようにして、繰返しパターンPrのL幅WL、H幅WHが更新される。なお、変数Kとして、2を用いることができる。つまり、変数Kを2とした場合は、更新の度ごとに、それまでのL幅WL、H幅WHと新しく検出されたL幅、H幅との単純平均をとることになる。しかし、単純平均に限らず、L幅WL、H幅WH、新しく検出されたL幅WL、H幅WHに係数を掛けるなどとした上で、変数Kを、2以外の数値、例えば、3、4、5、10などとして平均をとることも可能であり、更新の回数に応じて変数Kの値を大きくしていくことも可能である。
【0128】
また、初期のL幅WL、H幅WHを求める際に、上では5回分の平均値としたが、5回分以外、例えば、10回分、20回分などとしてもよい。
【0129】
繰返しパターンPrの周期WTは、互いに隣接するL幅WLとH幅WHとの和として求めればよい。
〔L幅およびH幅に基づく周波数および電圧値の算出〕
次に、ゼロクロス信号Szから得られたL幅およびH幅に基づいて、周波数fおよび電圧値veを算出する方法について説明する。
【0130】
図11には、L幅およびH幅に基づいて周波数fおよび電圧値veを算出するためのデータTD1、TD2が示されている。
【0131】
つまり、図11(A)に示すデータTD1は、交流電圧Vの電圧値(実効値)veの変化に対するL幅およびH幅の関係を示し、このデータTD1を用いて、L幅、H幅、またはそれらの変動率から電圧値veを求めることができる。
【0132】
また、図11(B)に示すデータTD2は、交流電圧Vの周波数fの変化に対するL幅およびH幅の関係を示す。データTD2が示すように、周波数fが変化してもL幅とH幅との比率は一定である。また、L幅とH幅との合計である周期は、半サイクルの周期に相当するから、次の(2)式から周波数fを求めることができる。
【0133】
f=1/2(L幅+H幅) ……(2)
以下、図11(A)(B)に示すデータTD1,2について説明する。
【0134】
データTD1は、交流電圧Vが50Hzであるとして、電圧値veを80V〜130Vに変化させた際に生成されるゼロクロス信号SzからL幅およびH幅をそれぞれ検出した値を示す。なお、ゼロクロス信号Szは、ノイズの影響を除去したゼロクロス信号Szが用いられる。
【0135】
また、電圧値veが100VのL幅およびH幅を基準として、異なる電圧値veにおけるL幅およびH幅を百分率で表示したL幅変動率およびH幅変動率が示されている。なお、マイナスが付されているのは、100Vの場合よりも減少していることを示す。
【0136】
さらに、100V以上の場合は、H幅変動率からL幅変動率を減算した値が示されており、100V以下の場合は、H幅変動率とL幅変動率とを加算した値が変動率として示されている。
【0137】
電圧変動率は、100Vに対する各電圧の変化率が示されている。
【0138】
データTD1から分かるように、交流電圧Vが変動しても、変動率から交流電圧Vの電圧値veを推測して検出することができる。
【0139】
データTD2は、交流電圧Vの電圧値veを100Vとして、周波数を40Hz〜72Hzに変化させた際に生成されるゼロクロス信号SzからL幅およびH幅をそれぞれ検出した値を示する。なお、ゼロクロス信号Szは、ノイズの影響を除去したゼロクロス信号Szが用いられる。
【0140】
また、周波数ごとにL幅とH幅とを加算したものを基準として、L幅およびH幅をそれぞれ百分率で表示したL幅率およびH幅率が示されている。
【0141】
データTD2から分かるように、交流電圧Vの電圧値veが変化しないのであれば、周波数fが変化してもL幅率およびH幅率はそれぞれ一定である。
【0142】
図11に示した結果から、交流電圧Vにおいて周波数fおよび電圧値veが同時に変動した場合には、まず周波数fが変動しているか否かをチェックして変動後の周波数fを算出し、次に上記変動率から電圧値veを算出すればよい。なお、上に述べたように、L幅とH幅を加算すると、交流電圧Vの周期の半分の値を求めることができるので、この値から交流電圧Vの周波数fを求めることができる。
〔位相制御の補正〕
次に、位相制御とその補正について説明する。
【0143】
図12には、スルーアップ制御またはスルーダウン制御のためのデータTD3〜TD6の例が示されている。
【0144】
これらのデータTD3〜TD6は、13回分のデータであり、交流電圧Vの半サイクルが13回分続くことによってスルーアップ制御またはスルーダウン制御が完了する。しかし、13回分のデータではなく、例えば20回分、50回分などの適当な個数のデータTDを用いてスルーアップ制御またはスルーダウン制御を行うことができる。
【0145】
図12(A)のデータTD3は、スルーアップ制御における半サイクル毎のヒーター114のオフおよびオンの時間の割合の一例を示す。スルーアップ制御であるので、半サイクルの数が増加するごとにヒーター114のオンの時間が徐々に増加する。なお、1回より以前は、ヒーター114には電力が供給されていない。また、13回より後は、ヒーター114には一定の電力が供給されている。
【0146】
図12(B)のデータTD4は、スルーダウン制御における半サイクル毎のヒーター114のオフおよびオンの時間の割合の一例を示す。スルーダウン制御であるので、半サイクルの数が増加するごとにヒーター114のオンの時間が徐々に減少する。なお、1回より以前は、ヒーター114には一定の電力が供給されている。また、13回より後は、ヒーター114には電力が供給されていない。
【0147】
図12(C)のデータTD5は、周波数fが50Hzの場合のスルーアップ制御におけるヒーター114のオフの時間およびオンの時間の一例を示す。
【0148】
図12(D)のデータTD6は、周波数fが65Hzの場合のヒーター114のスルーダウン制御におけるオフの時間およびオンの時間の一例を示す。
【0149】
上に述べたように、交流電圧Vの周波数fや電圧値veが変動すると、位相制御が予定通りに行われない。例えば、データTD3にしたがってスルーアップ制御を行っている際に、半サイクルの1回目から2回目の間で急激に電圧値veが低下した場合には、データTD3にしたがって2回目におけるヒーター114のオンの割合が25%のままでは当初の予定通りの電力がヒーター114に供給されない。そこで、このような場合には、交流電圧Vの電圧値veに応じて適度にオンの割合が大きくなるように補正することが好ましい。
【0150】
補正値検出部111は、例えばTD3〜TD6のように、各電圧値および各周波数対応する基準となる周波数および電圧値のデータを複数記憶している。そして、検出した電圧値および周波数に応じて、ヒーター114のオンオフ時間が好ましい時間となるような補正値を算出する。
【0151】
ここで、例えば、交流電圧Vの周波数fが変動し、電圧値veが変動していない場合について説明する。
【0152】
元の交流電圧Vよりも周波数が増加した場合には、H幅、L幅および周期はいずれも減少する。この場合に、元の交流電圧Vにおけるオフおよびオンの時間の割合を用いると、半サイクルあたりヒーター114に供給する電力量が元の交流電圧Vに比べて減少する。そこで、この場合には、オフの時間が短くなりオンの時間が長くなるように補正する。
【0153】
また、元の交流電圧Vよりも周波数が減少した場合には、H幅、L幅、および周期はいずれも増加する。この場合に、元の交流電圧Vにおけるオフおよびオンの時間の割合を用いると、半サイクルあたりヒーター114に供給する電力量が元の交流電圧Vに比べて増加する。そこで、この場合には、オフの時間が長くなりオンの時間が短くなるように補正する。
【0154】
次に、例えば、交流電圧Vの周波数fが変動せず、電圧値veが変動する場合について説明する。
【0155】
元の交流電圧Vよりも電圧値veが上昇した場合には、H幅が増加し、L幅が減少し、周期は変化がない。この場合に、元の交流電圧Vにおけるオフおよびオンの時間の割合を用いると、半サイクルあたりヒーター114に供給する電力量が元の交流電圧Vに比べて増加する。そこで、この場合には、オフの時間が長くなりオンの時間が短くなるように補正する。
【0156】
また、元の交流電圧Vよりも電圧値veが低下した場合には、H幅が減少し、L幅が増加し、周期は変化がない。この場合に、元の交流電圧Vにおけるオフおよびオンの時間の割合を用いると、半サイクルあたりヒーター114に供給する電力量が元の交流電圧Vに比べて減少する。そこで、オフの時間が短くなり、オンの時間が長くなるように補正する。
【0157】
例えば、交流電圧Vの電圧値が100Vのままで、周波数が50Hzから47Hzに変動する場合の補正値について説明する。スルーダウン制御が行われている場合に、周波数が50Hzであれば、3回目の半サイクルにおいてオフ時間は3msであり、オン時間は7msであることが好ましい。これに対して、周波数が47Hzであれば、3回目の半サイクルにおいてオフ時間は3.19msであり、オン時間は7.45msであることが好ましい。
【0158】
2回目の半サイクルまでは周波数が50Hzの場合に好ましいデータに基づいて位相制御を行っているが、3回目で周波数が47Hzに減少したので、オフ時間を増加させることが好ましい。
【0159】
補正値としては、47Hzのオフ時間およびオン時間を加算したものを、50Hzのオフ時間およびオン時間を加算したもので除した値とすればよい。つまり、この場合の補正値は、1.064(=10.64ms/10ms)である。
【0160】
ヒーターリモート生成部112は、この補正値を、47Hzの場合に好ましいオフ時間(3.19ms)に乗ずることにより、スイッチング部113に指示するオフ時間を求める。
【0161】
具体的には、3.39ms(=3.l9ms×1.064)が好ましいオフ時間であり、ヒーターリモート生成部112は、この値に基づいてヒーターリモート信号Shを生成する。
〔フローチャートによる説明〕
次に、電力制御部100による電力制御について、フローチャートを参照して説明する。
【0162】
図13には、電力制御部100における電力制御の概略の流れが示されている。
【0163】
図13において、画像形成装置1の電源をオンにすると(#11)、ゼロクロス信号Szが生成され(#12)、これに基づいて初期の繰返しパターンPrが生成される(#13)。操作者の入力などによって、基準電圧値verおよび基準周波数frが取得される(#14)。
【0164】
初期の処理が終わると、次に、ゼロクロス信号Szが生成され(#15)、ノイズの影響を取り除いた正しいL幅、H幅、具体的にはLow信号またはHigh信号などの正しいエッジを検出する(#16)。正しいL幅、H幅に基づいて、電圧値veおよび周波数fを求め(#17)、求めた電圧値veおよび周波数fにしたがって補正された位相角によって位相制御が行われる(#18)。
【0165】
また、正しいL幅、H幅に基づいて、繰返しパターンPrが更新される(#19)。
【0166】
以下、詳しいフローチャートに基づいて説明する。
【0167】
図14および図15は、画像形成装置1の電源投入時の動作の一例を示すフローチャートである。
【0168】
画像形成装置1の電源を投入した際には、交流電圧Vに基づいてゼロクロス信号Szが生成される。生成されたゼロクロス信号Szにおいて立下りエッジが検出されると(#101でYes)、時間幅の検出が開始される(#102)。
【0169】
ゼロクロス信号Szの立上りが検出されると(#103でYes)、ゼロクロス信号Szが立下ってから立上るまでの時間幅、すなわちL幅が検出されて記憶される(#104)。
【0170】
ゼロクロス信号Szの立上りが検出されると(#105でYes)、ゼロクロス信号Szが立上ってから立下るまでの時間幅、すなわちH幅が検出されて記憶される(#106)。
【0171】
L幅およびH幅がそれぞれ5回以上検出されれば(#107でYes)、これら5つのL幅の平均値であるAveLおよび5つのH幅の平均値であるAveHが算出される。また、5つのL幅と5つのH幅とのすべてが加算され、さらに5で除算されることにより周期Thの平均値であるAveThが算出される(#108)。
【0172】
操作者により入力された交流電圧Vの基準周波数frおよび基準電圧値verが取得される(#109、#110)。基準周波数frおよび基準電圧値verは、画像形成装置1を設置した場所における交流電圧Vの周波数および電圧値とされる値である。交流電圧Vは、実際には、これらの値に固定されているわけではなく変動することがある。
【0173】
平均値AveThに基づいて、交流電圧Vの周波数であるAC周波数(周波数f)が算出される(#111)。
【0174】
基準周波数frとAC周波数とが比較され(#112)、これらが一致しない場合(#112でNo)には初期補正が算出されて取得され(#113)、基準周波数frがAC周波数とされる(#114)。
【0175】
取得された初期補正は、位相制御におけるオフタイマーの設定値に反映される。初期補正は、基準周波数frの半サイクル分の時間をAveThに基づいて算出された周波数の半サイクル分の時間で除算することで算出される。例えば基準周波数が50Hzならば半サイクル分の時間は10msである。AveThに基づいて算出された周波数が55Hzならば、半サイクル分の時間は9.09msである。このとき、初期補正は10ms/9.09msとなる。そして、この初期補正を位相制御におけるオフタイマーの設定値に積算すればよい。
【0176】
基準周波数frとAC周波数とが一致する場合(#112でYes)は、#113および#114が行われない。
【0177】
AveHが正常H幅として取得され(#115)、AveLが正常L幅として取得される(#116)。
【0178】
繰返しパターンPrのLow信号Lの幅(以下、繰返しパターンL幅という)としてAveLが記憶され、繰返しパターンPrのHigh信号Hの幅(以下、繰返しパターンH幅という)としてAveHが記憶され、繰返しパターンPrの周期(以下、繰返しパターンThという)としてAveThが記憶される(#117)。
【0179】
待機中制御およびゼロクロス信号の重なり監視制御で用いられる重なりフラグがクリアされ(#118)、一時H幅がクリアされる(#119)。待機中制御が起動する(#120)。
【0180】
図16および図17は画像形成装置1の待機中制御の第1動作を示すフローチャートである。
【0181】
まず、ゼロクロス信号Szの立上りエッジが検出されると(#201でYes)、L幅が検出され、記憶される(#202)。このL幅についてL幅の判定処理がなされる(#203)。
【0182】
L幅の判定処理によりL幅が本物(正しい)であると判定された場合(#204で本物)には、今回検出されたL幅が正常L幅として取得される(#205)。
【0183】
現在のAveLと正常L幅との平均値が算出され、AveLがこの値に更新される(#206)。
【0184】
H幅の検出に向けて一時H幅が初期化され(#207)、待機中制御の第2動作が行われる(#208)。
【0185】
L幅の判定処理によりL幅が偽物(ノイズ)であると判定された場合(#204で偽物:ノイズ)は、ヒーターの位相制御が行われているか確認される(#209)。ヒーターの位相制御中でなければ(#209でNo)待機中制御の第2動作が行われる(#208)。ヒーターの位相制御中であれば(#209でYes)、ヒーターリモート信号Shがオンしているか確認される(#210)。
【0186】
ヒーターリモート信号Shがオンしていなければ(#210でNo)、待機中制御の第2動作が行われる(#208)。ヒーターリモート信号Shがオンしていれば(#210でYes)、L幅がノイズ補正量として取得(#211)されてから、待機中制御の第2動作が行われる(#208)。
【0187】
ノイズと判定されたL幅はノイズ補正量として、次回の半サイクルにおけるオフタイマーの設定値から減算される。つまり、今回の半サイクルにおいては、ノイズが生じたことによりノイズによるL幅分だけヒーター114に供給すべき電力が減少したことになる。そこで、その分だけ次回の半サイクルでは多めに電力をヒーター114に供給する。次回の半サイクルのオフタイマーの設定値からノイズ補正量を減算することにより、ヒーター114への電力供給時間が増加する。
【0188】
L幅の判定処理によりL幅が偽物(重なり)であると判定された場合(#204で偽物:重なり)は、ヒーターの位相制御が行われているかについて確認される(#213)。ヒーターの位相制御中でなければ(#213でNo)、待機中制御の第2動作が行われる(#208)。ヒーターの位相制御中であれば(#212でYes)、今回検出したL幅から正常L幅を減算することで重なり差分が算出され(#213)、残りH幅と重なり差分とが比較される(#214)。
【0189】
重なり差分が残りH幅よりも大きい場合(#214でYes)は、重なり差分から残りH幅が減算されて(#215)、その値がオフタイマーの設定値に加算され(#216)、待機中制御の第2動作が行われる(#208)。
【0190】
重なり差分が残りH幅以下である場合(#214でNo)は、残りH幅から重なり差分が減算されて(#217)、その値がオフタイマーの設定値から減算され(#218)、待機中制御の第2動作が行われる(#208)。
【0191】
L幅が偽物(重なり)であると判定された場合には、ゼロクロス信号Szの立下りから残りH幅時間経過後にヒーターリモート信号Shがオフとなる。重なり差分が残りH幅よりも大きい場合は、電力の供給量が増加することを抑制するために、オフタイマーの設定値を増加させる。また、重なり差分が残りH幅以下である場合は、電力の供給量が減少することを抑制するために、オフタイマーの設定値を減少させる。
【0192】
待機中制御の第2動作について説明する。待機中制御の第2動作は図16の#208で行われる。
【0193】
図18は画像形成装置1の待機中制御の第2動作を示すフローチャートである。
【0194】
まず、ゼロクロス信号Szの立下りエッジが検出されると(#301でYes)、H幅が検出される(#302)。
【0195】
H幅の判定処理がなされる(#303)。
【0196】
H幅の判定処理によりH幅が本物であると判定された場合(#304で本物)には、現在の一時H幅が正常H幅として取得される(#305)。
【0197】
現在のAveHと正常H幅との平均値が算出され、AveHがこの値に更新される(#306)。AveLとAveHとが加算されて、AveThがこの値に更新される(#307)。
【0198】
AveLが繰返しパターンL幅として更新され、AveHが繰返しパターンH幅として更新され、AveThが繰返しパターンThとして更新される(#308)。このように、繰返しパターンL幅、H幅、Thが更新される。
【0199】
ヒーターの位相制御が要求されているか確認され(#309)、ヒーターの位相制御が要求されていなければ(#309でNo)、待機中制御の第2動作を終了して図16の#201が行われる。
【0200】
ヒーターの位相制御が要求されていれば(#309でYes)、ヒーターの位相制御を行って(#310)、待機中制御の第2動作を終了して図16の#201が行われる。
【0201】
H幅の判定処理によりH幅が偽物であると判定された場合(#304で偽物)には、ヒーターの位相制御が行われているかについて確認される(#311)。
【0202】
ヒーターの位相制御中でなければ(#311でNo)、待機中制御の第2動作を終了して図16の#201が行われる。
【0203】
ヒーターの位相制御中であれば(#311でYes)、残りH幅が算出される(#312)。残りH幅は繰返しパターンThから後述する#502で算出した一時Thを減算することで算出される。
【0204】
残りH幅が正常L幅よりも大きい場合(#313でNo)には、待機中制御の第2動作を終了して図16の#201が行われる。
【0205】
残りH幅が正常L幅以下である場合(#313でYes)には、ゼロクロス信号Szの重なり監視制御を行って(#314)から、待機中制御の第2動作を終了して図16の#201が行われる。
【0206】
ヒーターの位相制御を行って(#310)、待機中制御の第2動作を終了して図16の#201が行われる。
【0207】
L幅判定処理について説明する。L幅判定処理は図16の#203で行われる。
【0208】
図20〜図22は、画像形成装置1のL幅判定処理の動作を示すフローチャートである。
【0209】
現在の一時H幅とL幅とを加算して得られた値が、新たな一時H幅として更新される(#401)。この一時H幅が一時Thとして取得される(#402)。今回のL幅と繰返しパターンL幅とが比較される(#403)。
【0210】
今回のL幅と繰返しパターンL幅とが一致するならば(#403でYes)、繰返しパターンThと一時Thとが比較される(#404)。
【0211】
繰返しパターンThと一時Thとが一致すれば(#404でYes)、今回のL幅は本物であると判断される(#405)。
【0212】
繰返しパターンThと一時Thとが一致しないならば(#404でNo)、H幅率とL幅率とが変動していないか判断される(#413)。
【0213】
具体的には、((一時Th−今回L幅)/一時Th)と(今回L幅/一時Th)とのそれぞれが、(AveH/AveTh)と(AveL/AveTh)と比べて変動しているか判断され、これらが変動していればH幅率とL幅率とが変動している。
【0214】
H幅率とL幅率とが変動していない場合(#413でYes)は、交流電圧Vの周波数が変動したと判断され(#414)、周波数補正が取得される(#415)。例えば、周波数補正は(一時Th/繰返しパターンTh)となる。
【0215】
そして、今回のL幅は本物であると判断される(#405)。
【0216】
今回のL幅と繰返しパターンL幅とが一致しない場合(#403でNo)は、繰返しパターンThと一時Thとが比較される(#406)。
【0217】
繰返しパターンThと一時Thとが一致する場合(#406でYes)は、交流電圧Vの周波数は変動せずに電圧値が変動していると判断され(#407)、電圧値補正が算出される(#408)。例えば、電圧上昇であり変動率が8%であれば、電圧値補正は1.08である。電圧下降であり変動率が10%であれば、電圧値補正は0.9である。
【0218】
そして、今回のL幅は本物であると判断される(#409)。
【0219】
繰返しパターンThと一時Thとが一致しない場合(#406でNo)は、H幅率とL幅率とが変動していないか判断される(#410)。
【0220】
具体的には、((一時Th−今回L幅)/一時Th)と(今回L幅/一時Th)とのそれぞれが、(AveH/AveTh)と(AveL/AveTh)と比べて変動しているか判断され、これらが変動していればH幅率とL幅率とが変動している。
【0221】
H幅率とL幅率とが変動していない場合(#410でYes)は、交流電圧Vの周波数が変動したと判断され(#411)、周波数補正が算出される(#412)。例えば、周波数補正は、(一時Th/繰返しパターンTh)となる。
【0222】
そして、今回のL幅は本物であると判断される(#409)。
【0223】
#413でH幅率とL幅率とが変動している場合(#413でNo)および#410でH幅率とL幅率とが変動している場合(#410でNo)は、重なりノイズフラグがオンしているか判断される(#416)。重なりノイズフラグがオンしている場合は(#416でYes)、重なりフラグをクリアし(#417)、重なりが発生していると判断される(#418)。そして、今回のL幅は偽物であり、重なりが生じていると判定される(#419)。
【0224】
重なりノイズフラグがオンしていない場合(#416でNo)は、ノイズが発生していると判断され(#420)、今回のL幅は偽物であると判定される(#421)。
【0225】
H幅判定処理について説明する。H幅判定処理は図18の#303で行われる。
【0226】
図23は画像形成装置1のH幅判定処理の動作を示すフローチャートである。
【0227】
現在の一時H幅と今回検出されたH幅とを加算して得られた値が、新たな一時H幅として更新される(#501)。この一時H幅と正常L幅とを加算して一時Thが算出される(#502)。
【0228】
一時H幅と繰返しパターンH幅とが比較される(#503)。
【0229】
一時H幅と繰返しパターンH幅とが一致するならば(#503でYes)、一時Thと繰返しパターンThとが比較される(#504)。
【0230】
一時Thと繰返しパターンThとが一致すれば(#504でYes)、今回検出されたH幅の立下りエッジは本物であると判断される(#505)。
【0231】
一時Thと繰返しパターンThとが一致しないならば(#504でNo)、H幅率とL幅率とが変動していないか判断される(#513)。
【0232】
具体的には、((一時Th−正常L幅)/一時Th)と(今回L幅/一時Th)とのそれぞれが、(AveH/AveTh)と(AveL/AveTh)と比べて変動しているか判断され、これらが変動していればH幅率とL幅率とが変動している。
【0233】
H幅率とL幅率とが変動していない場合(#513でYes)は、交流電圧Vの周波数が変動したと判断され(#514)、周波数補正が取得される(#515)。例えば、周波数補正は、(一時Th/繰返しパターンTh)となる。
【0234】
そして、今回のH幅の立下りエッジは本物であると判断される(#505)。
【0235】
一時H幅と繰返しパターンH幅とが一致しない場合(#503でNo)は、繰返しパターンThと一時Thとが比較される(#506)。
【0236】
繰返しパターンThと一時Thとが一致する場合(#506でYes)は、交流電圧Vの周波数は変動せずに電圧値が変動していると判断され(#507)、電圧値補正が算出される(#508)。例えば、電圧上昇であり変動率が8%であれば、電圧値補正は1.08である。電圧下降であり変動率が10%であれば、電圧値補正は0.9である。そして、今回のH幅の立下りエッジは本物であると判断される(#509)。
【0237】
繰返しパターンThと一時Thとが一致しない場合(#506でNo)は、H幅率とL幅率とが変動していないか判断される(#510)。
【0238】
具体的には、((一時Th−正常L幅)/一時Th)と(正常L幅/一時Th)とのそれぞれが、(AveH/AveTh)と(AveL/AveTh)と比べて変動しているか判断され、これらが変動していればH幅率とL幅率とが変動している。
【0239】
H幅率とL幅率とが変動していない場合(#510でYes)は、交流電圧Vの周波数が変動したと判断され(#511)、周波数補正が算出される(#512)。例えば、周波数補正は、(一時Th/繰返しパターンTh)となる。
【0240】
そして、今回のH幅の立下りエッジは本物であると判断される(#509)。
【0241】
#513でH幅率とL幅率とが変動している場合(#513でNo)および#510でH幅率とL幅率とが変動している場合(#510でNo)は、今回のH幅の立下りエッジはノイズであり偽物であると判断される(#516)。
【0242】
ヒーター114の位相制御の動作について説明する。ヒーター114の位相制御の動作は、図18の#310および図27の#806で行われる。
【0243】
図25は画像形成装置のヒーター114の位相制御の動作を示すフローチャートである。図18の#310の動作である。
【0244】
位相制御はヒーター114に通電を開始するときまたは通電を停止するときに行われる。位相制御は、ゼロクロス信号Szの本物の立下りエッジに同期する。
【0245】
位相制御における交流電圧Vの半サイクル毎のヒーター114のオフおよびオンの時間の割合を示したデータにしたがって位相制御が行われる。
【0246】
このようなデータに基づいて位相制御がなされている場合に、データのすべてが適用され位相制御が完了した場合(#601でYes)は位相制御の種類が確認される(#602)。
【0247】
位相制御がスルーアップ制御であった場合は、ヒーターリモート信号Shがオン(#603)となりヒーター114には全電力が供給される。
【0248】
位相制御がスルーダウン制御であった場合は、ヒーターリモート信号Shがオフ(#604)となりヒーター114には電力が供給されない。
【0249】
位相制御に関するデータがすべて完了しておらず、位相制御が完了していない場合(#601でNo)は、現在のAC周波数が取得される(#605)。
【0250】
さらに初期補正が取得され(#606)、周波数補正が取得され(#607)、電圧値補正が取得され(#608)、ノイズ補正が取得される(#609)。これらの取得された補正データはオフタイマーの設定値の補正に用いられる。
【0251】
これら補正データは、電源オン時の初期補正、交流電圧Vの周波数が変動したとときの周波数補正、交流電圧Vの電圧値が変動したとときの電圧値補正、ヒーターリモート信号Shのオン中にゼロクロス信号にノイズが生じたためにヒーター114への電力供給が遮断されたときのノイズ補正である。
【0252】
位相制御の種類が確認される(#602)。
【0253】
位相制御がスルーアップ制御であった場合は、スルーアップ用のデータが取得され(#611)、位相制御がスルーダウン制御であった場合は、スルーダウン用のデータが取得される(#612)。
【0254】
ヒーター114がオンされるまでの時間であるヒーターリモートオフ時間(オフタイマーの設定値)が算出される(#613)。
【0255】
例えばオフタイマーの設定値は、
((AC周波数の半波分の時間)×(ヒーターOFF割合)×(初期補正)×(周波数補正)×(電圧補正))−(ノイズ補正)
により算出される。
【0256】
周波数補正が初期化され(#614)、電圧値補正が初期化され(#615)、ノイズ補正が初期化される(#616)。
【0257】
ヒーターリモート信号Shがオフとされ(#617)、上記算出された時間の経過後にオンされてヒーター114の位相制御がなされる。
【0258】
図26は画像形成装置1のヒーター114のオン制御の動作を示す。これは、図25の#618により起動させられる。
【0259】
この動作が開始されると、算出されたオフタイマーの設定値の経過後にヒーター114の出力がオンさせられる(#701)。
【0260】
ゼロクロス信号Szの重なり監視制御の動作について説明する。ゼロクロス信号Szの重なり監視制御は図19の#314で行われる。
【0261】
図27は画像形成装置1のゼロクロス信号Szの重なり監視制御の動作を示すフローチャートである。
【0262】
図19の#312で算出された残りH幅分の時間が経過したかが判断される(#801)。
【0263】
残りH幅分の時間が経過していない場合(#801でNo)において、立上りエッジが検出されなければ(#802でNo)#801に戻り、立上りエッジが検出されれば(#802でYes)図16の#202が行われる。
【0264】
残りH幅分の時間が経過している場合(#801でYes)において、立上りエッジが検出されれば(#803でYes)、図16の#202が行われる。
【0265】
残りH幅分の時間が経過している場合(#801でYes)において、立上りエッジが検出されなければ(#803でNo)、ヒーターリモート信号Shがオフされる(#804)。
【0266】
ヒーター114の位相制御が要求されていれば(#805でYes)、ヒーター114の位相制御が行われ(#806)、重なりノイズフラグがオンとされる(#807)。
【0267】
ヒーター114の位相制御が要求されていなければ(#805でNo)、重なりノイズフラグがオンとされる(#807)。
【0268】
本実施形態に係る画像形成装置1は、上述のように、位相制御中に交流電圧Vの周波数や電圧値が変化しても、オフタイマーの設定値を補正することで好ましい位相制御を行うことができる。
【0269】
また、交流電圧Vにノイズが生じることにより、生じるゼロクロス信号Szのノイズの影響を受けずに好ましい位相制御を行うことができる。
【0270】
上に述べた実施形態において、電力制御部100、および画像形成装置1の全体または各部の構成、構造、形状、寸法、個数、材質、処理内容、処理順序、処理タイミングなどは、本発明の趣旨に沿って適宜変更することができる。
【符号の説明】
【0271】
1 画像形成装置
100 電力制御部
101 ゼロクロス信号生成部
104 信号幅検出部
105 データ記憶部
107 電圧値検出部
108 周波数検出部
109 繰返しパターン検出部
110 正常信号幅検出部
111 補正値検出部(スイッチング制御部)
112 ヒーターリモート生成部(スイッチング制御部)
113 スイッチング部
114 ヒーター(負荷)
200 操作パネル(操作部)
300 制御部
400 交流電源
V 交流電圧
Sz ゼロクロス信号
Sh ヒーターリモート信号
f 周波数
ve 電圧値
fr 基準周波数
ver 基準電圧値
【特許請求の範囲】
【請求項1】
交流電源から供給される交流電力を用いて位相制御を行う電力制御方法であって、
前記交流電源からの交流電圧の絶対値が所定の値以下であることに対応して第1レベルを示し前記交流電圧の絶対値が所定の値より大きいことに対応して第2レベルを示すゼロクロス信号を生成し、
前記ゼロクロス信号における、前記交流電圧の絶対値が所定の値以下である際の時間幅であるゼロクロス幅および前記交流電圧の絶対値が所定の値以上である際の時間幅である非ゼロクロス幅を検出し、
前記検出したゼロクロス幅および前記検出した非ゼロクロス幅に基づいて、前記交流電圧の周波数および電圧値を検出し、
前記検出した周波数および電圧値に応じて位相制御を行う、
ことを特徴とする電力制御方法。
【請求項2】
ノイズが生じていない状態の前記交流電圧における前記ゼロクロス幅および前記非ゼロクロス幅に基づいて生成された、基準となるゼロクロス幅である基準ゼロクロス幅および基準となる非ゼロクロス幅である基準非ゼロクロス幅と、前記検出したゼロクロス幅および前記検出した非ゼロクロス幅とを用いて、ノイズの影響を受けない前記ゼロクロス幅およびノイズの影響を受けない前記非ゼロクロス幅を検出し、
前記検出したノイズの影響を受けないゼロクロス幅および前記検出したノイズの影響を受けない非ゼロクロス幅に基づいて、前記周波数および前記電圧値を検出し、
前記検出した周波数および電圧値に応じて前記位相制御を行う、
請求項1記載の電力制御方法。
【請求項3】
前記第1レベルがLレベルであり、前記第2レベルがHレベルであって、
前記非ゼロクロス幅として、前記ゼロクロス信号の立上りエッジから立下りエッジまでの幅を検出し、ゼロクロス幅として、前記ゼロクロス信号の立下りエッジから立上りエッジまでの幅を検出する、
請求項1または2記載の電力制御方法。
【請求項4】
前記位相制御として、
前記ゼロクロス幅の開始位置を位相角φ=0とし、前記交流電圧の半サイクルごとに、オンとなる位相角φをπから0までの間で変化させることにより負荷への導通角を漸増するスルーアップ制御を行う、
請求項1または2記載の電力制御方法。
【請求項5】
前記位相制御として、
前記ゼロクロス幅の開始位置を位相角φ=0とし、前記交流電圧の半サイクルごとに、オンとなる位相角φを0からπまでの間で変化させることにより負荷への導通角を漸減するスルーダウン制御を行う、
請求項1または2記載の電力制御方法。
【請求項6】
前記検出した交流電圧に応じて位相角φを変化させて前記位相制御を行う
請求項4または5記載の電力制御方法。
【請求項7】
前記検出した非ゼロクロス幅が減少し、前記検出したゼロクロス幅が増加し、前記交流電圧の周波数が変化していない場合には、前記負荷への導通角を増加させる、
請求項6記載の電力制御方法。
【請求項8】
前記検出した非ゼロクロス幅が増加し、前記検出したゼロクロス幅が減少し、前記交流電圧の周波数が変化していない場合には、前記負荷への導通角を減少させる、
請求項6記載の電力制御方法。
【請求項9】
前記位相制御として、
前記交流電圧の半サイクルごとに負荷への導通時間を漸増するスルーアップ制御を行う、
請求項1または2記載の電力制御方法。
【請求項10】
前記位相制御として、
前記交流電圧の半サイクルごとに負荷への導通時間を漸減するスルーダウン制御を行う、
請求項1または2記載の電力制御方法。
【請求項11】
前記検出した交流電圧の周波数に応じて前記導通時間を変化させて前記位相制御を行う、
請求項9または10記載の電力制御方法。
【請求項12】
前記検出した非ゼロクロス幅が減少し、前記検出したゼロクロス幅が減少し、前記交流電圧の周波数が増加する場合には、前記負荷への導通時間を増加させる、
請求項11記載の電力制御方法。
【請求項13】
前記検出した非ゼロクロス幅が増加し、前記検出したゼロクロス幅が増加し、前記交流電圧の周波数が減少する場合には、前記負荷への導通時間を減少させる、
請求項11記載の電力制御方法。
【請求項14】
前記交流電圧にノイズが生じた場合に、当該ノイズが生じた前記交流電圧の半サイクルの次の半サイクルにおける導通角を、当該ノイズによるゼロクロス幅分だけ補正する、
請求項12または13記載の電力制御方法。
【請求項15】
前記交流電圧の基準となる周波数である基準周波数および前記交流電圧の基準となる基準電圧を外部から取得する、
請求項1または2記載の電力制御方法。
【請求項16】
前記基準周波数および前記基準電圧は操作者により指示される、
請求項15記載の電力制御方法。
【請求項17】
前記基準周波数と前記検出した交流電圧との周波数の差分、および、前記基準電圧と前記検出した交流電圧との差分に基づいて、位相制御の補正を行う、
請求項15記載の電力制御方法。
【請求項18】
交流電源からの交流電力を用いて位相制御を行う電力制御装置であって、
前記交流電源からの交流電圧の絶対値が所定の値以下であることに対応して第1レベルを示し前記交流電圧の絶対値が所定の値より大きいことに対応して第2レベルを示すゼロクロス信号を生成するゼロクロス信号生成部と、
生成された前記ゼロクロス信号における、前記交流電圧の絶対値が所定の値以下である際の時間幅であるゼロクロス幅および前記交流電圧の絶対値が所定の値以上である際の時間幅である非ゼロクロス幅を検出する信号幅検出部と、
前記交流電源からの交流電力を負荷に供給する際に、前記負荷に流れ込む電流のオンまたはオフを制御するスイッチング手段と、
前記検出したゼロクロス幅および前記検出した非ゼロクロス幅に基づいて、前記交流電圧の周波数および電圧値を検出し、前記検出した交流電圧の周波数および電圧値に応じて、前記スイッチング手段の動作を決定し、前記スイッチング手段に指示を与えるスイッチング制御部と、を備えた、
ことを特徴とする電力制御装置。
【請求項19】
交流電源からの交流電力が供給されて位相制御が行われる負荷を備えた画像形成装置であって、
前記交流電源からの交流電圧の絶対値が所定の値以下であることに対応して第1レベルを示し前記交流電圧の絶対値が所定の値より大きいことに対応して第2レベルを示すゼロクロス信号を生成するゼロクロス信号生成部と、
生成された前記ゼロクロス信号における、前記交流電圧の絶対値が所定の値以下である際の時間幅であるゼロクロス幅および前記交流電圧の絶対値が所定の値以上である際の時間幅である非ゼロクロス幅を検出する信号幅検出部と、
前記交流電源からの交流電力を負荷に供給する際に、前記負荷に流れ込む電流のオンまたはオフを制御するスイッチング手段と、
前記検出したゼロクロス幅および前記検出した非ゼロクロス幅に基づいて、前記交流電圧の周波数および電圧値を検出し、前記検出した交流電圧の周波数および電圧値に応じて、前記スイッチング手段の動作を決定し、前記スイッチング手段に指示を与えるスイッチング制御部と、を備えた、
ことを特徴とする画像形成装置。
【請求項20】
前記負荷はヒーターである、
請求項19記載の画像形成装置。
【請求項21】
前記交流電圧の基準となる周波数である基準周波数および前記交流電圧の基準となる基準電圧を操作者により入力するための操作部をさらに備え、
前記スイッチング制御部は、前記基準周波数、前記基準電圧、前記検出した交流電圧の周波数および前記検出した交流電圧に応じて、前記スイッチング手段の動作を決定する、
請求項19または20記載の画像形成装置。
【請求項1】
交流電源から供給される交流電力を用いて位相制御を行う電力制御方法であって、
前記交流電源からの交流電圧の絶対値が所定の値以下であることに対応して第1レベルを示し前記交流電圧の絶対値が所定の値より大きいことに対応して第2レベルを示すゼロクロス信号を生成し、
前記ゼロクロス信号における、前記交流電圧の絶対値が所定の値以下である際の時間幅であるゼロクロス幅および前記交流電圧の絶対値が所定の値以上である際の時間幅である非ゼロクロス幅を検出し、
前記検出したゼロクロス幅および前記検出した非ゼロクロス幅に基づいて、前記交流電圧の周波数および電圧値を検出し、
前記検出した周波数および電圧値に応じて位相制御を行う、
ことを特徴とする電力制御方法。
【請求項2】
ノイズが生じていない状態の前記交流電圧における前記ゼロクロス幅および前記非ゼロクロス幅に基づいて生成された、基準となるゼロクロス幅である基準ゼロクロス幅および基準となる非ゼロクロス幅である基準非ゼロクロス幅と、前記検出したゼロクロス幅および前記検出した非ゼロクロス幅とを用いて、ノイズの影響を受けない前記ゼロクロス幅およびノイズの影響を受けない前記非ゼロクロス幅を検出し、
前記検出したノイズの影響を受けないゼロクロス幅および前記検出したノイズの影響を受けない非ゼロクロス幅に基づいて、前記周波数および前記電圧値を検出し、
前記検出した周波数および電圧値に応じて前記位相制御を行う、
請求項1記載の電力制御方法。
【請求項3】
前記第1レベルがLレベルであり、前記第2レベルがHレベルであって、
前記非ゼロクロス幅として、前記ゼロクロス信号の立上りエッジから立下りエッジまでの幅を検出し、ゼロクロス幅として、前記ゼロクロス信号の立下りエッジから立上りエッジまでの幅を検出する、
請求項1または2記載の電力制御方法。
【請求項4】
前記位相制御として、
前記ゼロクロス幅の開始位置を位相角φ=0とし、前記交流電圧の半サイクルごとに、オンとなる位相角φをπから0までの間で変化させることにより負荷への導通角を漸増するスルーアップ制御を行う、
請求項1または2記載の電力制御方法。
【請求項5】
前記位相制御として、
前記ゼロクロス幅の開始位置を位相角φ=0とし、前記交流電圧の半サイクルごとに、オンとなる位相角φを0からπまでの間で変化させることにより負荷への導通角を漸減するスルーダウン制御を行う、
請求項1または2記載の電力制御方法。
【請求項6】
前記検出した交流電圧に応じて位相角φを変化させて前記位相制御を行う
請求項4または5記載の電力制御方法。
【請求項7】
前記検出した非ゼロクロス幅が減少し、前記検出したゼロクロス幅が増加し、前記交流電圧の周波数が変化していない場合には、前記負荷への導通角を増加させる、
請求項6記載の電力制御方法。
【請求項8】
前記検出した非ゼロクロス幅が増加し、前記検出したゼロクロス幅が減少し、前記交流電圧の周波数が変化していない場合には、前記負荷への導通角を減少させる、
請求項6記載の電力制御方法。
【請求項9】
前記位相制御として、
前記交流電圧の半サイクルごとに負荷への導通時間を漸増するスルーアップ制御を行う、
請求項1または2記載の電力制御方法。
【請求項10】
前記位相制御として、
前記交流電圧の半サイクルごとに負荷への導通時間を漸減するスルーダウン制御を行う、
請求項1または2記載の電力制御方法。
【請求項11】
前記検出した交流電圧の周波数に応じて前記導通時間を変化させて前記位相制御を行う、
請求項9または10記載の電力制御方法。
【請求項12】
前記検出した非ゼロクロス幅が減少し、前記検出したゼロクロス幅が減少し、前記交流電圧の周波数が増加する場合には、前記負荷への導通時間を増加させる、
請求項11記載の電力制御方法。
【請求項13】
前記検出した非ゼロクロス幅が増加し、前記検出したゼロクロス幅が増加し、前記交流電圧の周波数が減少する場合には、前記負荷への導通時間を減少させる、
請求項11記載の電力制御方法。
【請求項14】
前記交流電圧にノイズが生じた場合に、当該ノイズが生じた前記交流電圧の半サイクルの次の半サイクルにおける導通角を、当該ノイズによるゼロクロス幅分だけ補正する、
請求項12または13記載の電力制御方法。
【請求項15】
前記交流電圧の基準となる周波数である基準周波数および前記交流電圧の基準となる基準電圧を外部から取得する、
請求項1または2記載の電力制御方法。
【請求項16】
前記基準周波数および前記基準電圧は操作者により指示される、
請求項15記載の電力制御方法。
【請求項17】
前記基準周波数と前記検出した交流電圧との周波数の差分、および、前記基準電圧と前記検出した交流電圧との差分に基づいて、位相制御の補正を行う、
請求項15記載の電力制御方法。
【請求項18】
交流電源からの交流電力を用いて位相制御を行う電力制御装置であって、
前記交流電源からの交流電圧の絶対値が所定の値以下であることに対応して第1レベルを示し前記交流電圧の絶対値が所定の値より大きいことに対応して第2レベルを示すゼロクロス信号を生成するゼロクロス信号生成部と、
生成された前記ゼロクロス信号における、前記交流電圧の絶対値が所定の値以下である際の時間幅であるゼロクロス幅および前記交流電圧の絶対値が所定の値以上である際の時間幅である非ゼロクロス幅を検出する信号幅検出部と、
前記交流電源からの交流電力を負荷に供給する際に、前記負荷に流れ込む電流のオンまたはオフを制御するスイッチング手段と、
前記検出したゼロクロス幅および前記検出した非ゼロクロス幅に基づいて、前記交流電圧の周波数および電圧値を検出し、前記検出した交流電圧の周波数および電圧値に応じて、前記スイッチング手段の動作を決定し、前記スイッチング手段に指示を与えるスイッチング制御部と、を備えた、
ことを特徴とする電力制御装置。
【請求項19】
交流電源からの交流電力が供給されて位相制御が行われる負荷を備えた画像形成装置であって、
前記交流電源からの交流電圧の絶対値が所定の値以下であることに対応して第1レベルを示し前記交流電圧の絶対値が所定の値より大きいことに対応して第2レベルを示すゼロクロス信号を生成するゼロクロス信号生成部と、
生成された前記ゼロクロス信号における、前記交流電圧の絶対値が所定の値以下である際の時間幅であるゼロクロス幅および前記交流電圧の絶対値が所定の値以上である際の時間幅である非ゼロクロス幅を検出する信号幅検出部と、
前記交流電源からの交流電力を負荷に供給する際に、前記負荷に流れ込む電流のオンまたはオフを制御するスイッチング手段と、
前記検出したゼロクロス幅および前記検出した非ゼロクロス幅に基づいて、前記交流電圧の周波数および電圧値を検出し、前記検出した交流電圧の周波数および電圧値に応じて、前記スイッチング手段の動作を決定し、前記スイッチング手段に指示を与えるスイッチング制御部と、を備えた、
ことを特徴とする画像形成装置。
【請求項20】
前記負荷はヒーターである、
請求項19記載の画像形成装置。
【請求項21】
前記交流電圧の基準となる周波数である基準周波数および前記交流電圧の基準となる基準電圧を操作者により入力するための操作部をさらに備え、
前記スイッチング制御部は、前記基準周波数、前記基準電圧、前記検出した交流電圧の周波数および前記検出した交流電圧に応じて、前記スイッチング手段の動作を決定する、
請求項19または20記載の画像形成装置。
【図1】


【図2】
【図3】

【図4】
【図5】

【図6】
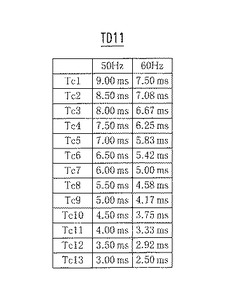
【図7】
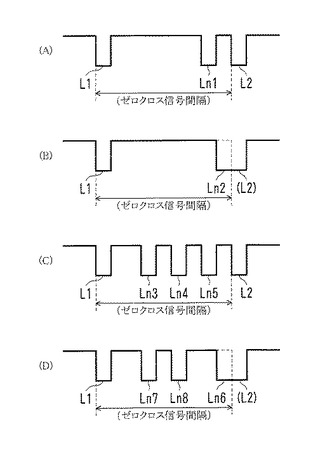
【図8】
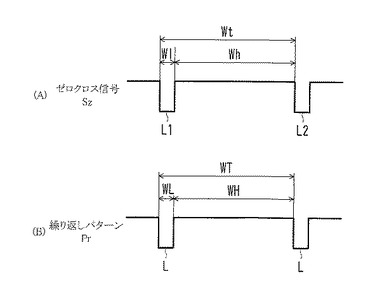
【図9】
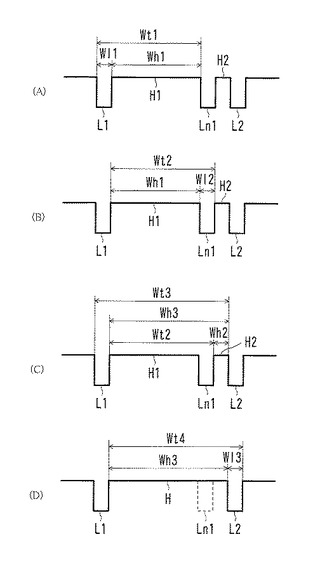
【図10】

【図11】
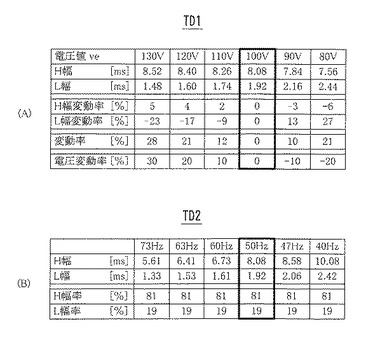
【図12】

【図13】
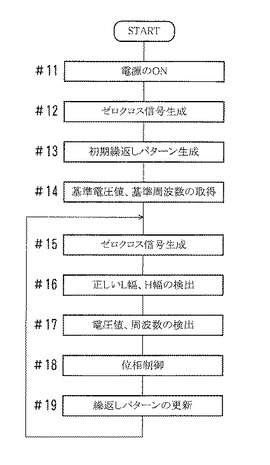
【図14】
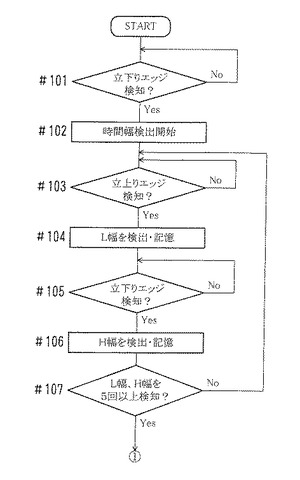
【図15】
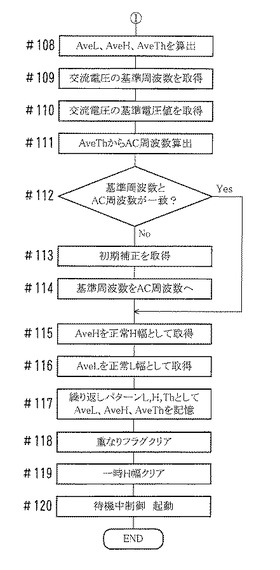
【図16】
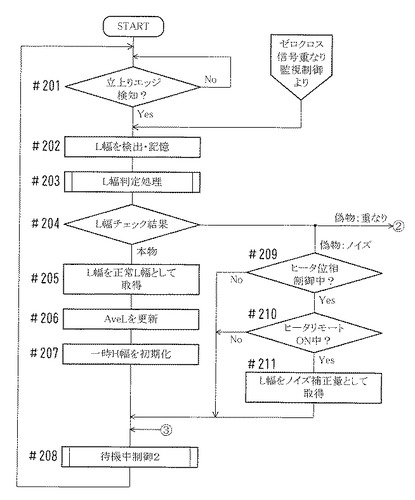
【図17】
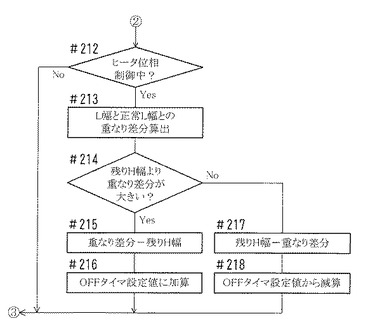
【図18】

【図19】

【図20】
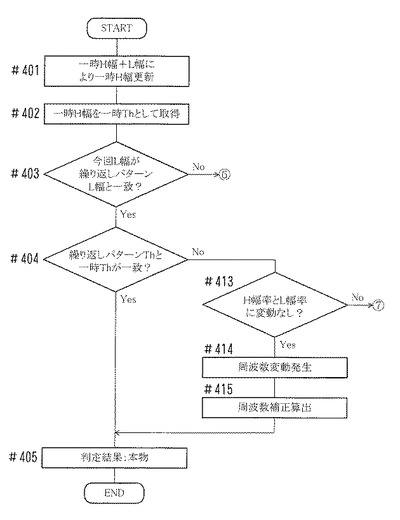
【図21】
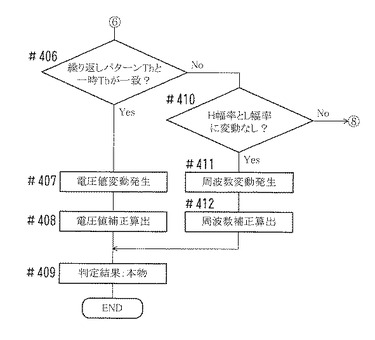
【図22】
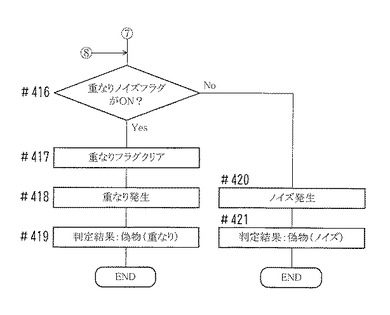
【図23】
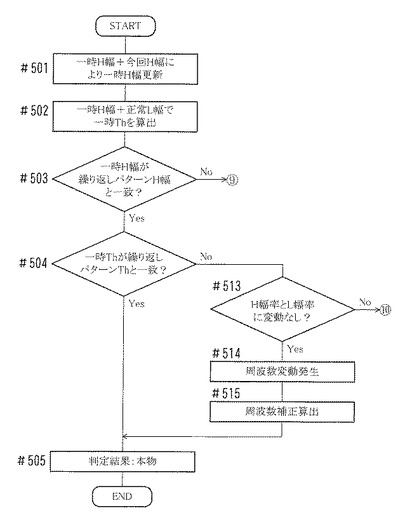
【図24】
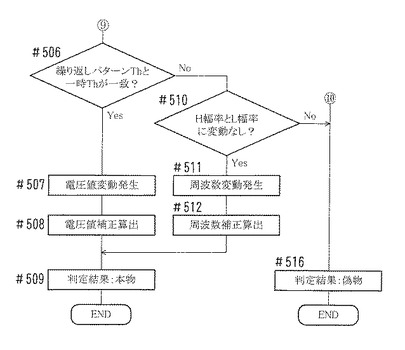
【図25】
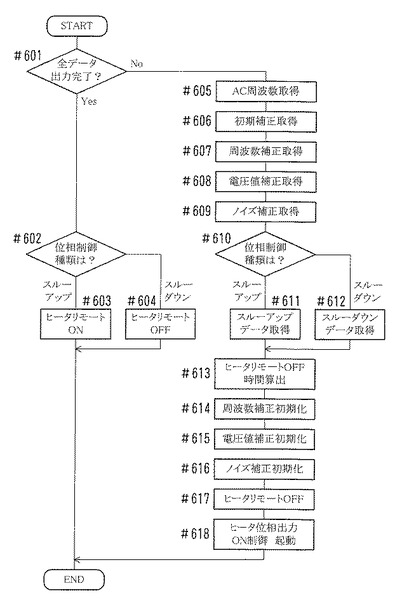
【図26】

【図27】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【公開番号】特開2013−97691(P2013−97691A)
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願番号】特願2011−241836(P2011−241836)
【出願日】平成23年11月4日(2011.11.4)
【出願人】(303000372)コニカミノルタビジネステクノロジーズ株式会社 (12,802)
【Fターム(参考)】
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願日】平成23年11月4日(2011.11.4)
【出願人】(303000372)コニカミノルタビジネステクノロジーズ株式会社 (12,802)
【Fターム(参考)】
[ Back to top ]