
電力変換装置
【課題】単発的な異常が原因でブートストラップ電圧の低下を一時的に検出した場合に、上アームスイッチング素子の動作停止期間を最短に制御することが可能な電力変換装置を提供する。
【解決手段】電圧監視回路24は、ブートストラップコンデンサ22に充電されているブートストラップ電圧(c)を監視する。電圧監視回路24は、上アームスイッチング素子駆動信号(b)の上アームスイッチング素子11への出力を、ブートストラップ電圧(c)が閾値電圧以上であれば実行し、ブートストラップ電圧(c)が閾値電圧よりも低下すれば停止する。停止期間制御回路25は、電圧監視回路24が上アームスイッチング素子11への上アームスイッチング素子駆動信号(b)の出力を停止する期間を制御する。
【解決手段】電圧監視回路24は、ブートストラップコンデンサ22に充電されているブートストラップ電圧(c)を監視する。電圧監視回路24は、上アームスイッチング素子駆動信号(b)の上アームスイッチング素子11への出力を、ブートストラップ電圧(c)が閾値電圧以上であれば実行し、ブートストラップ電圧(c)が閾値電圧よりも低下すれば停止する。停止期間制御回路25は、電圧監視回路24が上アームスイッチング素子11への上アームスイッチング素子駆動信号(b)の出力を停止する期間を制御する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電力変換装置に関し、より特定的には、インバータとインバータを駆動するインバータ駆動回路とを備える電力変換装置に関する。
【背景技術】
【0002】
一般に、インバータは、Nチャネル型のMOS(金属酸化膜半導体)トランジスタ等による上アームスイッチング素子と下アームスイッチング素子とが、直列に接続された構成が採用される。そして、この上アームスイッチング素子に電圧を印加するインバータ駆動回路として代表的な回路に、ブートストラップ型駆動回路が存在する。このブートストラップ型のインバータ駆動回路には、下アームスイッチング素子駆動用の電源電圧をブートストラップダイオード及びブートストラップコンデンサを用いて上アームスイッチング素子駆動用の電源電圧としても使用することができる、という利点がある。
【0003】
しかし、ブートストラップ型のインバータ駆動回路は、ブートストラップコンデンサの充電電圧で上アームスイッチング素子のゲート端子電圧を供給している。このため、何らかの事情によってブートストラップコンデンサの充電電圧が十分に確保できない事態が生じてしまうと、上アームスイッチング素子を安定して正しくスイッチング動作させることができない。
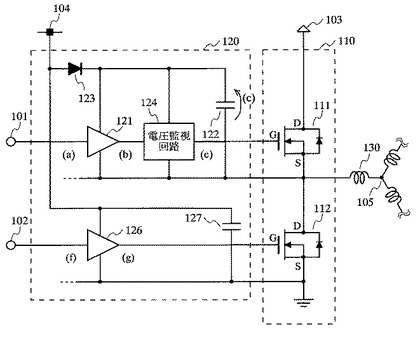
そこで、このブートストラップコンデンサに充電されているブートストラップ電圧を監視して、ブートストラップ電圧が十分でない場合には、上アームスイッチング素子の動作を停止するというインバータ駆動回路が考案されている。図4は、このブートストラップ電圧監視機能を有するブートストラップ型のインバータ駆動回路を備えた、従来の電力変換装置の構成を示す図である(例えば、特許文献1を参照)。
【0004】
図4において、下アームスイッチング素子ドライバ126は、第2の入力端子102から下アームスイッチング素子112用の駆動制御信号(f)を入力し、この駆動制御信号(f)に応じた電圧を有する下アームスイッチング素子駆動信号(g)を生成する。そして、下アームスイッチング素子ドライバ126は、生成した下アームスイッチング素子駆動信号(g)を下アームスイッチング素子112のゲート端子Gに供給する。
【0005】
上アームスイッチング素子ドライバ121は、第1の入力端子101から上アームスイッチング素子111用の駆動制御信号(a)を入力し、この駆動制御信号(a)に応じた電圧を有する上アームスイッチング素子駆動信号(b)を生成する。この上アームスイッチング素子ドライバ121は、ブートストラップコンデンサ122によって充電されているブートストラップ電圧(c)が供給されることで作動する。そして、上アームスイッチング素子ドライバ121は、生成した上アームスイッチング素子駆動信号(b)を、電圧監視回路124を介して、上アームスイッチング素子111のゲート端子Gに供給する。
【0006】
電圧監視回路124は、ブートストラップ電圧(c)を監視する。そして、電圧監視回路124は、ブートストラップ電圧(c)が所定の閾値電圧よりも高い場合は上アームスイッチング素子駆動信号(b)を出力し、ブートストラップ電圧(c)が所定の閾値電圧よりも低くなった場合は上アームスイッチング素子駆動信号(b)の出力を停止するように構成した、新たな上アームスイッチング素子駆動信号(e)を、上アームスイッチング素子111のゲート端子Gに供給する。
【0007】
この制御により、従来の電力変換装置では、上アームスイッチング素子111のソース端子Sの電圧が変動して所定の閾値電圧よりも低くなった場合でも、上アームスイッチング素子111による不具合の発生を事前に防止することが可能となる。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開平3−150075号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかしながら、上述した従来の電力変換装置は、ブートストラップ電圧(c)が所定の閾値電圧よりも低くなれば、上アームスイッチング素子111の動作を完全に停止させることを行う。
このため、コンデンサリーク等の原因によるブートストラップ電圧(c)の低下状態が継続して発生するような場合には問題ないが、ノイズ等の単発的な異常が原因で一度だけブートストラップ電圧(c)が低下した場合でも、上アームスイッチング素子111の動作を完全に停止させることになる。この状態を以下に説明する。
【0010】
例えば、従来の電力変換装置が、自動車制御における電動パワーステアリング(EPS)システム用のアシストモータ駆動に用いられる場合を考える。このEPSシステムでは、上アームスイッチング素子111のソース端子Sからモータへ向けて出力信号が供給されるのであるが、タイヤを縁石にぶつけたり、ステアリングを逆方向に急回転させたりすると、モータから上アームスイッチング素子111のソース端子Sへ向かって回生電流が流れる。この回生電流は、上アームスイッチング素子111のソース端子Sに単発的な異常信号(ノイズ)として現れてしまう。
【0011】
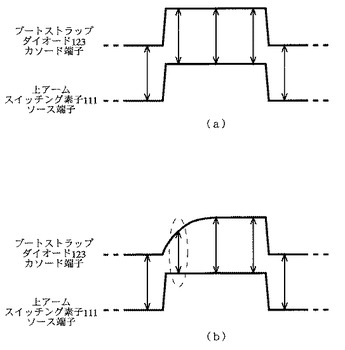
ここで、ブートストラップ回路が理想的な場合、上アームスイッチング素子111のソース端子Sに単発的な異常信号が瞬間的に重畳してソース端子Sの電圧が変動しても、ブートストラップ電圧(c)がそれに瞬時に追従して変動するため、ブートストラップコンデンサ122の充電電圧が十分に確保できる(図5(a))。しかし、現実には、ブートストラップ回路の充電経路に寄生する抵抗成分等の影響によってブートストラップコンデンサ122への充電が遅れるため、ブートストラップ電圧(c)が所定の閾値電圧を一時的に下回る現象が生じてしまう(図5(b)の破線楕円箇所)。
【0012】
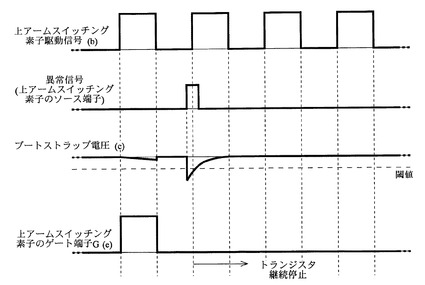
このため、図6に示すように、ノイズ等の単発的な異常信号が原因で一度だけブートストラップ電圧(c)が低下した場合でも、上アームスイッチング素子111の動作を停止させて、その後再開させることがない。従って、従来の電力変換装置では、不必要な回路停止を招いている結果となる。例示したEPSシステムで考えると、ノイズ検出によるブートストラップ電圧低下の一時的な判断によって、パワーステアリング機能が停止するといった問題が生じる。
【0013】
それ故に、本発明の目的は、単発的な異常が原因でブートストラップ電圧の低下を一時的に検出した場合に、上アームスイッチング素子の動作停止期間を最短に制御することが可能な電力変換装置を提供することである。
【課題を解決するための手段】
【0014】
本発明は、上アームスイッチング素子と下アームスイッチング素子とが直列接続されたインバータと、ブートストラップコンデンサから供給される電圧で作動し、上アームスイッチング素子を動作させる駆動信号を供給する駆動回路とを備える、電力変換装置に向けられている。
そして、上記目的を達成するために、本発明の電力変換装置は、ブートストラップコンデンサの電圧を監視し、この電圧の異常検出に応じて、駆動回路から上アームスイッチング素子への駆動信号の出力供給を停止させる電圧監視回路と、電圧監視回路が駆動信号の出力供給を停止させる期間を制御する停止期間制御回路とを備えている。
【0015】
停止期間制御回路は、駆動信号の出力供給を停止させる期間を、上アームスイッチング素子のオン動作を指示する信号とオフ動作を指示する信号とが交互に繰り返されるドライバ駆動周期の1サイクルを超える予め定めた時間に設定していることが望ましい。また、停止期間制御回路は、電圧監視回路がブートストラップコンデンサの電圧異常を検出する毎に、予め定めた時間のカウントを新たに開始する。
【0016】
典型的には、電圧監視回路は、ブートストラップコンデンサの電圧が所定の閾値電圧以下であれば異常であると判断する。この所定の閾値電圧は、上アームスイッチング素子が安定したスイッチング動作を確保できる値に基づいて決定されることが好ましい。
【発明の効果】
【0017】
上記本発明の電力変換装置によれば、単発的な異常が原因でブートストラップ電圧の低下を一時的に検出した場合であっても、上アームスイッチング素子の動作停止期間を最短に制御することができる。
【図面の簡単な説明】
【0018】
【図1】本発明の一実施形態に係る電力変換装置の構成を示す図
【図2】本実施形態に係る電力変換装置において、単発的な異常が原因でブートストラップ電圧(c)が一時的に低下した場合の各信号波形を説明する図
【図3】継続した異常が原因でブートストラップ電圧(c)の低下が周期的に発生している場合の信号波形を説明する図
【図4】従来の電力変換装置の構成を示す図
【図5】従来の電力変換装置に存在する問題を説明するための図
【図6】従来の電力変換装置において、単発的な異常が原因でブートストラップ電圧(c)が一時的に低下した場合の各信号波形を説明する図
【発明を実施するための形態】
【0019】
以下、本発明の実施形態を、図面を参照しながら説明する。
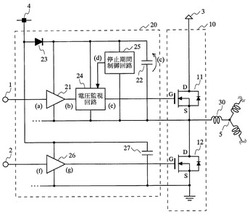
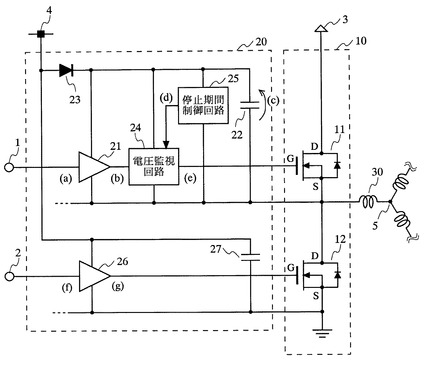
図1は、本発明の一実施形態に係る電力変換装置の構成を示す図である。図1において、本実施形態に係る電力変換装置は、インバータ10と、インバータ10を駆動するインバータ駆動回路20とを備える。
【0020】
<構成>
インバータ10は、上アームスイッチング素子11と下アームスイッチング素子12とが、直列に接続された構成である。この上アームスイッチング素子11及び下アームスイッチング素子12には、MOSトランジスタやIGBT(絶縁ゲートバイポーラトランジスタ)が用いられる。本実施形態では、これらのスイッチング素子に、Nチャネル型のMOSトランジスタを用いた例を説明する。上アームスイッチング素子11のソース端子Sは、下アームスイッチング素子12のドレイン端子Dに接続されており、この接続点はモータコイル30を介してモータ中点端子5に接続されている。下アームスイッチング素子12のソース端子Sは、接地されている。上アームスイッチング素子11及び下アームスイッチング素子12は、インバータ駆動回路20から出力される駆動信号をゲート端子Gにそれぞれ入力し、相補的なオン動作/オフ動作を行って、上アームスイッチング素子11のソース端子Sから信号を出力する。
【0021】
インバータ駆動回路20は、上アームスイッチング素子ドライバ21と、ブートストラップコンデンサ22と、ブートストラップダイオード23と、電圧監視回路24と、停止期間制御回路25と、下アームスイッチング素子ドライバ26と、下アームスイッチング素子駆動用コンデンサ27とを備える。
【0022】
上アームスイッチング素子ドライバ21は、第1の入力端子1から上アームスイッチング素子11の駆動を制御するための駆動制御信号(a)を入力し、この駆動制御信号(a)に応じた電圧を有する上アームスイッチング素子駆動信号(b)を生成する。この上アームスイッチング素子ドライバ21は、第1の電源4の電圧からブートストラップダイオード23の電圧降下量Vfを減算したブートストラップ電圧(c)によって作動する。このブートストラップ電圧(c)は、ブートストラップダイオード23のカソード端子と上アームスイッチング素子11のソース端子Sとの間に挿入されるブートストラップコンデンサ22の充放電動作によって供給される。
【0023】
電圧監視回路24は、ブートストラップコンデンサ22に充電されるブートストラップ電圧(c)を監視し、ブートストラップ電圧(c)によって、上アームスイッチング素子ドライバ21が生成した上アームスイッチング素子駆動信号(b)を上アームスイッチング素子11のゲート端子Gに出力するか否かを制御する。具体的には、電圧監視回路24は、ブートストラップ電圧(c)が所定の閾値電圧よりも高い場合は上アームスイッチング素子駆動信号(b)を出力し、ブートストラップ電圧(c)が所定の閾値電圧よりも低くなった場合は上アームスイッチング素子駆動信号(b)の出力を停止するように構成した、新たな上アームスイッチング素子駆動信号(e)を、上アームスイッチング素子11のゲート端子Gに供給する。停止期間制御回路25は、ブートストラップ電圧(c)が所定の閾値電圧よりも低くなった場合における、電圧監視回路24が上アームスイッチング素子駆動信号(b)を上アームスイッチング素子11のゲート端子Gに出力停止する時間を、停止期間制御信号(d)を用いて制御する。
【0024】
下アームスイッチング素子ドライバ26は、第2の入力端子2から下アームスイッチング素子12の駆動を制御するための駆動制御信号(f)を入力し、この駆動制御信号(f)に応じた電圧を有する下アームスイッチング素子駆動信号(g)を生成する。そして、下アームスイッチング素子ドライバ26は、生成した下アームスイッチング素子駆動信号(g)を下アームスイッチング素子12のゲート端子Gに供給する。この下アームスイッチング素子ドライバ26は、第1の電源4によって作動する。下アームスイッチング素子駆動用コンデンサ27は、この第1の電源4の電圧を平滑して安定化させるコンデンサである。なお、この下アームスイッチング素子駆動用コンデンサ27は、インバータ駆動回路20から省くことが可能である。
【0025】
<基本動作>
まず、上記構成による本発明の一実施形態に係る電力変換装置の基本的な動作を説明する。
第1の入力端子1と第2の入力端子2とには、MOSトランジスタのオン動作を指示する信号とMOSトランジスタのオフ動作を指示する信号とを所定の周期(ドライバ駆動周期)で交互に繰り返した駆動制御信号(a)及び(f)が、極性反転状態でそれぞれに入力される。
【0026】
第2の入力端子2から下アームスイッチング素子12をオン動作させる駆動制御信号(f)(第1の入力端子1から上アームスイッチング素子11をオフ動作させる駆動制御信号(a))が入力される状態においては、下アームスイッチング素子ドライバ26は、オン電圧の下アームスイッチング素子駆動信号(g)を下アームスイッチング素子12のゲート端子Gに印加する。オン電圧がゲート端子Gに印加された下アームスイッチング素子12は、ドレイン端子D−ソース端子S間を導通させ、第1の電源4→ブートストラップダイオード23→ブートストラップコンデンサ22→下アームスイッチング素子12→グラウンドの電流経路を形成する。この電流経路の形成により、ブートストラップコンデンサ22には、ブートストラップ電圧(c)が充電される。
【0027】
一方、第1の入力端子1から上アームスイッチング素子11をオン動作させる駆動制御信号(a)(第2の入力端子2から下アームスイッチング素子12をオフ動作させる駆動制御信号(f))が入力される状態においては、上アームスイッチング素子ドライバ21は、ブートストラップコンデンサ22に充電されているブートストラップ電圧(c)によって電源供給を受けて動作する。上アームスイッチング素子ドライバ21は、このオン電圧の上アームスイッチング素子駆動信号(b)を、電圧監視回路24を介して、上アームスイッチング素子11のゲート端子Gに印加する。オン電圧がゲート端子Gに印加された上アームスイッチング素子11は、ドレイン端子D−ソース端子S間を導通させ、接続される電源に応じた所定の電圧をモータコイル30に供給する。
【0028】
<本発明による特徴的な動作>
次に、図2及び図3をさらに参照し、上記構成による本発明の一実施形態に係る電力変換装置の特徴的な動作を説明する。
【0029】
電圧監視回路24は、ブートストラップコンデンサ22に充電されているブートストラップ電圧(c)を監視し、ブートストラップ電圧(c)が所定の閾値電圧より低下したか否かを判断する。この所定の閾値電圧は、上アームスイッチング素子11が安定したスイッチング動作を確保できる値に基づいて決定される。ブートストラップ電圧(c)が所定の閾値電圧以上であると判断している間は、電圧監視回路24は、上アームスイッチング素子ドライバ21から与えられる上アームスイッチング素子駆動信号(b)を上アームスイッチング素子11のゲート端子Gに出力する。一方、ブートストラップ電圧(c)が所定の閾値電圧よりも低下したと判断した場合、電圧監視回路24は、上アームスイッチング素子ドライバ21から与えられる上アームスイッチング素子駆動信号(b)を上アームスイッチング素子11のゲート端子Gに出力することを停止する。
【0030】
停止期間制御回路25は、ブートストラップコンデンサ22に充電されているブートストラップ電圧(c)が所定の閾値電圧より低下したことで、電圧監視回路24から上アームスイッチング素子11のゲート端子Gへの上アームスイッチング素子駆動信号(b)の出力が停止されたことを検出する。そして、停止期間制御回路25は、この出力停止を検出すると、検出時から予め定めた時間が経過するまでは「出力停止」を、かつ予め定めた時間が経過した後は「出力再開」を指示する停止期間制御信号(d)を生成して、電圧監視回路24に与える。
【0031】
この予め定めた時間には、MOSトランジスタのオン動作を指示する信号とMOSトランジスタのオフ動作を指示する信号とが交互に繰り返されるドライバ駆動周期の1サイクルを超える値からXサイクル以下の値が設定される。この変数Xは、電力変換装置が用いられるシステムに依存して任意に設定される。例えば、電力変換装置が、自動車制御における電動パワーステアリングシステム(EPSシステム)用のアシストモータ駆動に用いられる場合には、駆動モータ停止によるパワーアシスト無しを運転者が体感できない程度、実験によればドライバ駆動周期の2サイクル程度の時間が最適である。
【0032】
この停止期間制御信号(d)を受信した電圧監視回路24は、停止期間制御信号(d)に従って上アームスイッチング素子駆動信号(b)の出力有無を切り替えた新たな上アームスイッチング素子駆動信号(e)を生成し、上アームスイッチング素子11のゲート端子Gに出力する。上アームスイッチング素子11は、電圧監視回路24から与えられる新たな上アームスイッチング素子駆動信号(e)に従って、オン動作及びオフ動作を実行する。
【0033】
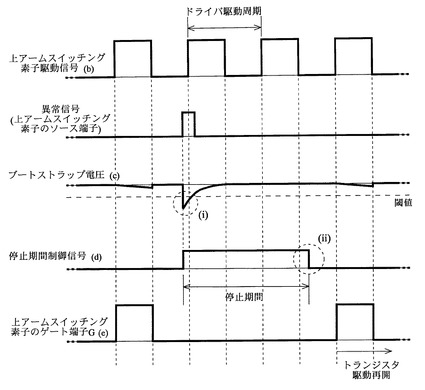
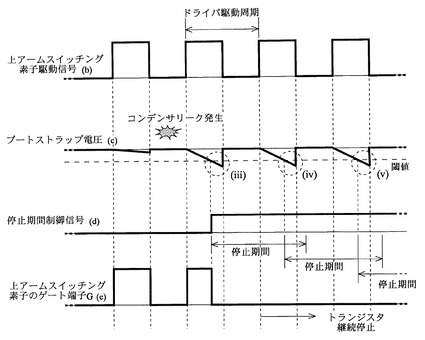
図2及び図3は、上アームスイッチング素子ドライバ21、電圧監視回路24、停止期間制御回路25、及び上アームスイッチング素子11の入出力信号状態を、具体的に例示したタイミングチャートである。図2は、単発的な異常(バーストノイズ等)が原因でブートストラップ電圧(c)が一時的に低下した場合の各信号波形を説明する図であり、図3は、継続した異常(コンデンサリーク等)が原因でブートストラップ電圧(c)の低下が周期的に発生している場合の信号波形を説明する図である。
【0034】
図2において、上アームスイッチング素子11のソース端子Sが接続されている信号線(ブートストラップ電圧(c)の基準電位)に異常信号が単発的に重畳してソース端子Sの電圧が瞬時に上昇し、ブートストラップコンデンサ22の両電極間の電圧差が縮まるような場合を考える。この場合、充電経路に寄生する抵抗成分等の影響によってブートストラップコンデンサ22の充電が遅れるため、ブートストラップ電圧(c)が所定の閾値電圧を下回る現象が生じる(点線円(i))。この時、停止期間制御回路25が、「出力停止」を指示する停止期間制御信号(d)を電圧監視回路24に出力する。電圧監視回路24は、この停止期間制御信号(d)を受けて、オフ動作させる上アームスイッチング素子駆動信号(e)を上アームスイッチング素子11のゲート端子Gに印加する。そして、予め定めた時間が経過した後(点線円(ii))、停止期間制御回路25が、「出力開始」を指示する停止期間制御信号(d)を電圧監視回路24に出力する。電圧監視回路24は、この停止期間制御信号(d)を受けて、オン動作させる上アームスイッチング素子駆動信号(e)を上アームスイッチング素子11のゲート端子Gに印加する。
【0035】
この図2のように、単発的な異常が原因でブートストラップ電圧(c)が一時的に低下した場合には、異常が発生した短期間における誤動作等の不具合の発生を回避しつつ、異常が無くなった後は、停止期間制御回路25が予め定めた時間の経過を待って、上アームスイッチング素子11の動作が通常通り再開される。
【0036】
図3において、ブートストラップコンデンサ22にリークが発生し、上アームスイッチング素子ドライバ21の作動時のタイミングで周期的にブートストラップ電圧(c)が低下するような場合を考える。この場合、上アームスイッチング素子ドライバ21の作動時にブートストラップ電圧(c)が徐々に低下していき、ブートストラップ電圧(c)が所定の閾値電圧を下回る現象が生じる(点線円(iii))。この時、停止期間制御回路25が、「出力停止」を指示する停止期間制御信号(d)を電圧監視回路24に出力する。電圧監視回路24は、この停止期間制御信号(d)を受けて、オフ動作させる上アームスイッチング素子駆動信号(e)を上アームスイッチング素子11のゲート端子Gに印加する。この場合、予め定めた時間が経過する前(予め定めた時間のカウント中)に、ドライバ駆動周期のタイミングで次々ブートストラップ電圧(c)の低下現象が生じる(新たに予め定めた時間のカウントが開始する)(点線円(iv)及び(v))。従って、停止期間制御回路25は、「出力開始」に遷移することなく継続して「出力停止」を指示する停止期間制御信号(d)を電圧監視回路24に出力することになる。
【0037】
この図3のように、継続した異常が原因でブートストラップ電圧(c)の一時的な低下が周期的に発生する場合には、ブートストラップ電圧(c)の異常を検出する毎に、予め定めた時間のカウントを新たに開始するように制御するため、一旦異常が発生した後は異常の発生が無くなるまで上アームスイッチング素子11の動作を継続して停止させる。これにより、従来と同様に、誤動作等の不具合の発生を回避することができる。
【0038】
以上のように、本発明の一実施形態に係る電力変換装置によれば、ブートストラップ電圧(c)の低下時に行う上アームスイッチング素子11の動作停止を、時限を設けて実行する。
これにより、一時的なブートストラップ電圧(c)の低下が発生した場合、上アームスイッチング素子11の動作停止期間を短くして動作を再開させるので、動作停止による影響を最小限に抑えることが可能となる。また、周期的なブートストラップ電圧(c)の低下が発生した場合には、従来と同様に、上アームスイッチング素子11の動作停止を継続して行うことが可能となる。
【産業上の利用可能性】
【0039】
本発明は、ブートストラップ型のインバータ駆動回路を備える電力変換装置等に利用可能であり、特に単発的な異常が原因でブートストラップ電圧の低下を一時的に検出した場合において、上アームスイッチング素子の動作停止期間を最短に制御したい場合等に有用である。
【符号の説明】
【0040】
1、2、101、102 端子
3、4、103、104 電源
5、105 モータ中点端子
10、110 インバータ
11、111 上アームスイッチング素子
12、112 下アームスイッチング素子
20、120 インバータ駆動回路
21、121 上アームスイッチング素子ドライバ
22、122 ブートストラップコンデンサ
23、123 ブートストラップダイオード
24、124 電圧監視回路
25 停止期間制御回路
26、126 下アームスイッチング素子ドライバ
27、127 下アームスイッチング素子駆動用コンデンサ
30、130 モータコイル
【技術分野】
【0001】
本発明は、電力変換装置に関し、より特定的には、インバータとインバータを駆動するインバータ駆動回路とを備える電力変換装置に関する。
【背景技術】
【0002】
一般に、インバータは、Nチャネル型のMOS(金属酸化膜半導体)トランジスタ等による上アームスイッチング素子と下アームスイッチング素子とが、直列に接続された構成が採用される。そして、この上アームスイッチング素子に電圧を印加するインバータ駆動回路として代表的な回路に、ブートストラップ型駆動回路が存在する。このブートストラップ型のインバータ駆動回路には、下アームスイッチング素子駆動用の電源電圧をブートストラップダイオード及びブートストラップコンデンサを用いて上アームスイッチング素子駆動用の電源電圧としても使用することができる、という利点がある。
【0003】
しかし、ブートストラップ型のインバータ駆動回路は、ブートストラップコンデンサの充電電圧で上アームスイッチング素子のゲート端子電圧を供給している。このため、何らかの事情によってブートストラップコンデンサの充電電圧が十分に確保できない事態が生じてしまうと、上アームスイッチング素子を安定して正しくスイッチング動作させることができない。
そこで、このブートストラップコンデンサに充電されているブートストラップ電圧を監視して、ブートストラップ電圧が十分でない場合には、上アームスイッチング素子の動作を停止するというインバータ駆動回路が考案されている。図4は、このブートストラップ電圧監視機能を有するブートストラップ型のインバータ駆動回路を備えた、従来の電力変換装置の構成を示す図である(例えば、特許文献1を参照)。
【0004】
図4において、下アームスイッチング素子ドライバ126は、第2の入力端子102から下アームスイッチング素子112用の駆動制御信号(f)を入力し、この駆動制御信号(f)に応じた電圧を有する下アームスイッチング素子駆動信号(g)を生成する。そして、下アームスイッチング素子ドライバ126は、生成した下アームスイッチング素子駆動信号(g)を下アームスイッチング素子112のゲート端子Gに供給する。
【0005】
上アームスイッチング素子ドライバ121は、第1の入力端子101から上アームスイッチング素子111用の駆動制御信号(a)を入力し、この駆動制御信号(a)に応じた電圧を有する上アームスイッチング素子駆動信号(b)を生成する。この上アームスイッチング素子ドライバ121は、ブートストラップコンデンサ122によって充電されているブートストラップ電圧(c)が供給されることで作動する。そして、上アームスイッチング素子ドライバ121は、生成した上アームスイッチング素子駆動信号(b)を、電圧監視回路124を介して、上アームスイッチング素子111のゲート端子Gに供給する。
【0006】
電圧監視回路124は、ブートストラップ電圧(c)を監視する。そして、電圧監視回路124は、ブートストラップ電圧(c)が所定の閾値電圧よりも高い場合は上アームスイッチング素子駆動信号(b)を出力し、ブートストラップ電圧(c)が所定の閾値電圧よりも低くなった場合は上アームスイッチング素子駆動信号(b)の出力を停止するように構成した、新たな上アームスイッチング素子駆動信号(e)を、上アームスイッチング素子111のゲート端子Gに供給する。
【0007】
この制御により、従来の電力変換装置では、上アームスイッチング素子111のソース端子Sの電圧が変動して所定の閾値電圧よりも低くなった場合でも、上アームスイッチング素子111による不具合の発生を事前に防止することが可能となる。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開平3−150075号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかしながら、上述した従来の電力変換装置は、ブートストラップ電圧(c)が所定の閾値電圧よりも低くなれば、上アームスイッチング素子111の動作を完全に停止させることを行う。
このため、コンデンサリーク等の原因によるブートストラップ電圧(c)の低下状態が継続して発生するような場合には問題ないが、ノイズ等の単発的な異常が原因で一度だけブートストラップ電圧(c)が低下した場合でも、上アームスイッチング素子111の動作を完全に停止させることになる。この状態を以下に説明する。
【0010】
例えば、従来の電力変換装置が、自動車制御における電動パワーステアリング(EPS)システム用のアシストモータ駆動に用いられる場合を考える。このEPSシステムでは、上アームスイッチング素子111のソース端子Sからモータへ向けて出力信号が供給されるのであるが、タイヤを縁石にぶつけたり、ステアリングを逆方向に急回転させたりすると、モータから上アームスイッチング素子111のソース端子Sへ向かって回生電流が流れる。この回生電流は、上アームスイッチング素子111のソース端子Sに単発的な異常信号(ノイズ)として現れてしまう。
【0011】
ここで、ブートストラップ回路が理想的な場合、上アームスイッチング素子111のソース端子Sに単発的な異常信号が瞬間的に重畳してソース端子Sの電圧が変動しても、ブートストラップ電圧(c)がそれに瞬時に追従して変動するため、ブートストラップコンデンサ122の充電電圧が十分に確保できる(図5(a))。しかし、現実には、ブートストラップ回路の充電経路に寄生する抵抗成分等の影響によってブートストラップコンデンサ122への充電が遅れるため、ブートストラップ電圧(c)が所定の閾値電圧を一時的に下回る現象が生じてしまう(図5(b)の破線楕円箇所)。
【0012】
このため、図6に示すように、ノイズ等の単発的な異常信号が原因で一度だけブートストラップ電圧(c)が低下した場合でも、上アームスイッチング素子111の動作を停止させて、その後再開させることがない。従って、従来の電力変換装置では、不必要な回路停止を招いている結果となる。例示したEPSシステムで考えると、ノイズ検出によるブートストラップ電圧低下の一時的な判断によって、パワーステアリング機能が停止するといった問題が生じる。
【0013】
それ故に、本発明の目的は、単発的な異常が原因でブートストラップ電圧の低下を一時的に検出した場合に、上アームスイッチング素子の動作停止期間を最短に制御することが可能な電力変換装置を提供することである。
【課題を解決するための手段】
【0014】
本発明は、上アームスイッチング素子と下アームスイッチング素子とが直列接続されたインバータと、ブートストラップコンデンサから供給される電圧で作動し、上アームスイッチング素子を動作させる駆動信号を供給する駆動回路とを備える、電力変換装置に向けられている。
そして、上記目的を達成するために、本発明の電力変換装置は、ブートストラップコンデンサの電圧を監視し、この電圧の異常検出に応じて、駆動回路から上アームスイッチング素子への駆動信号の出力供給を停止させる電圧監視回路と、電圧監視回路が駆動信号の出力供給を停止させる期間を制御する停止期間制御回路とを備えている。
【0015】
停止期間制御回路は、駆動信号の出力供給を停止させる期間を、上アームスイッチング素子のオン動作を指示する信号とオフ動作を指示する信号とが交互に繰り返されるドライバ駆動周期の1サイクルを超える予め定めた時間に設定していることが望ましい。また、停止期間制御回路は、電圧監視回路がブートストラップコンデンサの電圧異常を検出する毎に、予め定めた時間のカウントを新たに開始する。
【0016】
典型的には、電圧監視回路は、ブートストラップコンデンサの電圧が所定の閾値電圧以下であれば異常であると判断する。この所定の閾値電圧は、上アームスイッチング素子が安定したスイッチング動作を確保できる値に基づいて決定されることが好ましい。
【発明の効果】
【0017】
上記本発明の電力変換装置によれば、単発的な異常が原因でブートストラップ電圧の低下を一時的に検出した場合であっても、上アームスイッチング素子の動作停止期間を最短に制御することができる。
【図面の簡単な説明】
【0018】
【図1】本発明の一実施形態に係る電力変換装置の構成を示す図
【図2】本実施形態に係る電力変換装置において、単発的な異常が原因でブートストラップ電圧(c)が一時的に低下した場合の各信号波形を説明する図
【図3】継続した異常が原因でブートストラップ電圧(c)の低下が周期的に発生している場合の信号波形を説明する図
【図4】従来の電力変換装置の構成を示す図
【図5】従来の電力変換装置に存在する問題を説明するための図
【図6】従来の電力変換装置において、単発的な異常が原因でブートストラップ電圧(c)が一時的に低下した場合の各信号波形を説明する図
【発明を実施するための形態】
【0019】
以下、本発明の実施形態を、図面を参照しながら説明する。
図1は、本発明の一実施形態に係る電力変換装置の構成を示す図である。図1において、本実施形態に係る電力変換装置は、インバータ10と、インバータ10を駆動するインバータ駆動回路20とを備える。
【0020】
<構成>
インバータ10は、上アームスイッチング素子11と下アームスイッチング素子12とが、直列に接続された構成である。この上アームスイッチング素子11及び下アームスイッチング素子12には、MOSトランジスタやIGBT(絶縁ゲートバイポーラトランジスタ)が用いられる。本実施形態では、これらのスイッチング素子に、Nチャネル型のMOSトランジスタを用いた例を説明する。上アームスイッチング素子11のソース端子Sは、下アームスイッチング素子12のドレイン端子Dに接続されており、この接続点はモータコイル30を介してモータ中点端子5に接続されている。下アームスイッチング素子12のソース端子Sは、接地されている。上アームスイッチング素子11及び下アームスイッチング素子12は、インバータ駆動回路20から出力される駆動信号をゲート端子Gにそれぞれ入力し、相補的なオン動作/オフ動作を行って、上アームスイッチング素子11のソース端子Sから信号を出力する。
【0021】
インバータ駆動回路20は、上アームスイッチング素子ドライバ21と、ブートストラップコンデンサ22と、ブートストラップダイオード23と、電圧監視回路24と、停止期間制御回路25と、下アームスイッチング素子ドライバ26と、下アームスイッチング素子駆動用コンデンサ27とを備える。
【0022】
上アームスイッチング素子ドライバ21は、第1の入力端子1から上アームスイッチング素子11の駆動を制御するための駆動制御信号(a)を入力し、この駆動制御信号(a)に応じた電圧を有する上アームスイッチング素子駆動信号(b)を生成する。この上アームスイッチング素子ドライバ21は、第1の電源4の電圧からブートストラップダイオード23の電圧降下量Vfを減算したブートストラップ電圧(c)によって作動する。このブートストラップ電圧(c)は、ブートストラップダイオード23のカソード端子と上アームスイッチング素子11のソース端子Sとの間に挿入されるブートストラップコンデンサ22の充放電動作によって供給される。
【0023】
電圧監視回路24は、ブートストラップコンデンサ22に充電されるブートストラップ電圧(c)を監視し、ブートストラップ電圧(c)によって、上アームスイッチング素子ドライバ21が生成した上アームスイッチング素子駆動信号(b)を上アームスイッチング素子11のゲート端子Gに出力するか否かを制御する。具体的には、電圧監視回路24は、ブートストラップ電圧(c)が所定の閾値電圧よりも高い場合は上アームスイッチング素子駆動信号(b)を出力し、ブートストラップ電圧(c)が所定の閾値電圧よりも低くなった場合は上アームスイッチング素子駆動信号(b)の出力を停止するように構成した、新たな上アームスイッチング素子駆動信号(e)を、上アームスイッチング素子11のゲート端子Gに供給する。停止期間制御回路25は、ブートストラップ電圧(c)が所定の閾値電圧よりも低くなった場合における、電圧監視回路24が上アームスイッチング素子駆動信号(b)を上アームスイッチング素子11のゲート端子Gに出力停止する時間を、停止期間制御信号(d)を用いて制御する。
【0024】
下アームスイッチング素子ドライバ26は、第2の入力端子2から下アームスイッチング素子12の駆動を制御するための駆動制御信号(f)を入力し、この駆動制御信号(f)に応じた電圧を有する下アームスイッチング素子駆動信号(g)を生成する。そして、下アームスイッチング素子ドライバ26は、生成した下アームスイッチング素子駆動信号(g)を下アームスイッチング素子12のゲート端子Gに供給する。この下アームスイッチング素子ドライバ26は、第1の電源4によって作動する。下アームスイッチング素子駆動用コンデンサ27は、この第1の電源4の電圧を平滑して安定化させるコンデンサである。なお、この下アームスイッチング素子駆動用コンデンサ27は、インバータ駆動回路20から省くことが可能である。
【0025】
<基本動作>
まず、上記構成による本発明の一実施形態に係る電力変換装置の基本的な動作を説明する。
第1の入力端子1と第2の入力端子2とには、MOSトランジスタのオン動作を指示する信号とMOSトランジスタのオフ動作を指示する信号とを所定の周期(ドライバ駆動周期)で交互に繰り返した駆動制御信号(a)及び(f)が、極性反転状態でそれぞれに入力される。
【0026】
第2の入力端子2から下アームスイッチング素子12をオン動作させる駆動制御信号(f)(第1の入力端子1から上アームスイッチング素子11をオフ動作させる駆動制御信号(a))が入力される状態においては、下アームスイッチング素子ドライバ26は、オン電圧の下アームスイッチング素子駆動信号(g)を下アームスイッチング素子12のゲート端子Gに印加する。オン電圧がゲート端子Gに印加された下アームスイッチング素子12は、ドレイン端子D−ソース端子S間を導通させ、第1の電源4→ブートストラップダイオード23→ブートストラップコンデンサ22→下アームスイッチング素子12→グラウンドの電流経路を形成する。この電流経路の形成により、ブートストラップコンデンサ22には、ブートストラップ電圧(c)が充電される。
【0027】
一方、第1の入力端子1から上アームスイッチング素子11をオン動作させる駆動制御信号(a)(第2の入力端子2から下アームスイッチング素子12をオフ動作させる駆動制御信号(f))が入力される状態においては、上アームスイッチング素子ドライバ21は、ブートストラップコンデンサ22に充電されているブートストラップ電圧(c)によって電源供給を受けて動作する。上アームスイッチング素子ドライバ21は、このオン電圧の上アームスイッチング素子駆動信号(b)を、電圧監視回路24を介して、上アームスイッチング素子11のゲート端子Gに印加する。オン電圧がゲート端子Gに印加された上アームスイッチング素子11は、ドレイン端子D−ソース端子S間を導通させ、接続される電源に応じた所定の電圧をモータコイル30に供給する。
【0028】
<本発明による特徴的な動作>
次に、図2及び図3をさらに参照し、上記構成による本発明の一実施形態に係る電力変換装置の特徴的な動作を説明する。
【0029】
電圧監視回路24は、ブートストラップコンデンサ22に充電されているブートストラップ電圧(c)を監視し、ブートストラップ電圧(c)が所定の閾値電圧より低下したか否かを判断する。この所定の閾値電圧は、上アームスイッチング素子11が安定したスイッチング動作を確保できる値に基づいて決定される。ブートストラップ電圧(c)が所定の閾値電圧以上であると判断している間は、電圧監視回路24は、上アームスイッチング素子ドライバ21から与えられる上アームスイッチング素子駆動信号(b)を上アームスイッチング素子11のゲート端子Gに出力する。一方、ブートストラップ電圧(c)が所定の閾値電圧よりも低下したと判断した場合、電圧監視回路24は、上アームスイッチング素子ドライバ21から与えられる上アームスイッチング素子駆動信号(b)を上アームスイッチング素子11のゲート端子Gに出力することを停止する。
【0030】
停止期間制御回路25は、ブートストラップコンデンサ22に充電されているブートストラップ電圧(c)が所定の閾値電圧より低下したことで、電圧監視回路24から上アームスイッチング素子11のゲート端子Gへの上アームスイッチング素子駆動信号(b)の出力が停止されたことを検出する。そして、停止期間制御回路25は、この出力停止を検出すると、検出時から予め定めた時間が経過するまでは「出力停止」を、かつ予め定めた時間が経過した後は「出力再開」を指示する停止期間制御信号(d)を生成して、電圧監視回路24に与える。
【0031】
この予め定めた時間には、MOSトランジスタのオン動作を指示する信号とMOSトランジスタのオフ動作を指示する信号とが交互に繰り返されるドライバ駆動周期の1サイクルを超える値からXサイクル以下の値が設定される。この変数Xは、電力変換装置が用いられるシステムに依存して任意に設定される。例えば、電力変換装置が、自動車制御における電動パワーステアリングシステム(EPSシステム)用のアシストモータ駆動に用いられる場合には、駆動モータ停止によるパワーアシスト無しを運転者が体感できない程度、実験によればドライバ駆動周期の2サイクル程度の時間が最適である。
【0032】
この停止期間制御信号(d)を受信した電圧監視回路24は、停止期間制御信号(d)に従って上アームスイッチング素子駆動信号(b)の出力有無を切り替えた新たな上アームスイッチング素子駆動信号(e)を生成し、上アームスイッチング素子11のゲート端子Gに出力する。上アームスイッチング素子11は、電圧監視回路24から与えられる新たな上アームスイッチング素子駆動信号(e)に従って、オン動作及びオフ動作を実行する。
【0033】
図2及び図3は、上アームスイッチング素子ドライバ21、電圧監視回路24、停止期間制御回路25、及び上アームスイッチング素子11の入出力信号状態を、具体的に例示したタイミングチャートである。図2は、単発的な異常(バーストノイズ等)が原因でブートストラップ電圧(c)が一時的に低下した場合の各信号波形を説明する図であり、図3は、継続した異常(コンデンサリーク等)が原因でブートストラップ電圧(c)の低下が周期的に発生している場合の信号波形を説明する図である。
【0034】
図2において、上アームスイッチング素子11のソース端子Sが接続されている信号線(ブートストラップ電圧(c)の基準電位)に異常信号が単発的に重畳してソース端子Sの電圧が瞬時に上昇し、ブートストラップコンデンサ22の両電極間の電圧差が縮まるような場合を考える。この場合、充電経路に寄生する抵抗成分等の影響によってブートストラップコンデンサ22の充電が遅れるため、ブートストラップ電圧(c)が所定の閾値電圧を下回る現象が生じる(点線円(i))。この時、停止期間制御回路25が、「出力停止」を指示する停止期間制御信号(d)を電圧監視回路24に出力する。電圧監視回路24は、この停止期間制御信号(d)を受けて、オフ動作させる上アームスイッチング素子駆動信号(e)を上アームスイッチング素子11のゲート端子Gに印加する。そして、予め定めた時間が経過した後(点線円(ii))、停止期間制御回路25が、「出力開始」を指示する停止期間制御信号(d)を電圧監視回路24に出力する。電圧監視回路24は、この停止期間制御信号(d)を受けて、オン動作させる上アームスイッチング素子駆動信号(e)を上アームスイッチング素子11のゲート端子Gに印加する。
【0035】
この図2のように、単発的な異常が原因でブートストラップ電圧(c)が一時的に低下した場合には、異常が発生した短期間における誤動作等の不具合の発生を回避しつつ、異常が無くなった後は、停止期間制御回路25が予め定めた時間の経過を待って、上アームスイッチング素子11の動作が通常通り再開される。
【0036】
図3において、ブートストラップコンデンサ22にリークが発生し、上アームスイッチング素子ドライバ21の作動時のタイミングで周期的にブートストラップ電圧(c)が低下するような場合を考える。この場合、上アームスイッチング素子ドライバ21の作動時にブートストラップ電圧(c)が徐々に低下していき、ブートストラップ電圧(c)が所定の閾値電圧を下回る現象が生じる(点線円(iii))。この時、停止期間制御回路25が、「出力停止」を指示する停止期間制御信号(d)を電圧監視回路24に出力する。電圧監視回路24は、この停止期間制御信号(d)を受けて、オフ動作させる上アームスイッチング素子駆動信号(e)を上アームスイッチング素子11のゲート端子Gに印加する。この場合、予め定めた時間が経過する前(予め定めた時間のカウント中)に、ドライバ駆動周期のタイミングで次々ブートストラップ電圧(c)の低下現象が生じる(新たに予め定めた時間のカウントが開始する)(点線円(iv)及び(v))。従って、停止期間制御回路25は、「出力開始」に遷移することなく継続して「出力停止」を指示する停止期間制御信号(d)を電圧監視回路24に出力することになる。
【0037】
この図3のように、継続した異常が原因でブートストラップ電圧(c)の一時的な低下が周期的に発生する場合には、ブートストラップ電圧(c)の異常を検出する毎に、予め定めた時間のカウントを新たに開始するように制御するため、一旦異常が発生した後は異常の発生が無くなるまで上アームスイッチング素子11の動作を継続して停止させる。これにより、従来と同様に、誤動作等の不具合の発生を回避することができる。
【0038】
以上のように、本発明の一実施形態に係る電力変換装置によれば、ブートストラップ電圧(c)の低下時に行う上アームスイッチング素子11の動作停止を、時限を設けて実行する。
これにより、一時的なブートストラップ電圧(c)の低下が発生した場合、上アームスイッチング素子11の動作停止期間を短くして動作を再開させるので、動作停止による影響を最小限に抑えることが可能となる。また、周期的なブートストラップ電圧(c)の低下が発生した場合には、従来と同様に、上アームスイッチング素子11の動作停止を継続して行うことが可能となる。
【産業上の利用可能性】
【0039】
本発明は、ブートストラップ型のインバータ駆動回路を備える電力変換装置等に利用可能であり、特に単発的な異常が原因でブートストラップ電圧の低下を一時的に検出した場合において、上アームスイッチング素子の動作停止期間を最短に制御したい場合等に有用である。
【符号の説明】
【0040】
1、2、101、102 端子
3、4、103、104 電源
5、105 モータ中点端子
10、110 インバータ
11、111 上アームスイッチング素子
12、112 下アームスイッチング素子
20、120 インバータ駆動回路
21、121 上アームスイッチング素子ドライバ
22、122 ブートストラップコンデンサ
23、123 ブートストラップダイオード
24、124 電圧監視回路
25 停止期間制御回路
26、126 下アームスイッチング素子ドライバ
27、127 下アームスイッチング素子駆動用コンデンサ
30、130 モータコイル
【特許請求の範囲】
【請求項1】
上アームスイッチング素子と下アームスイッチング素子とが直列接続されたインバータと、ブートストラップコンデンサから供給される電圧で作動し、当該上アームスイッチング素子を動作させる駆動信号を供給する駆動回路とを備える、電力変換装置であって、
前記ブートストラップコンデンサの電圧を監視し、当該電圧の異常検出に応じて、前記駆動回路から前記上アームスイッチング素子への前記駆動信号の出力供給を停止させる電圧監視回路と、
前記電圧監視回路が前記駆動信号の出力供給を停止させる期間を制御する停止期間制御回路とを備える、電力変換装置。
【請求項2】
前記停止期間制御回路は、前記駆動信号の出力供給を停止させる期間を、前記上アームスイッチング素子のオン動作を指示する信号とオフ動作を指示する信号とが交互に繰り返されるドライバ駆動周期の1サイクルを超える予め定めた時間に設定していることを特徴とする、請求項1に記載の電力変換装置。
【請求項3】
前記停止期間制御回路は、前記電圧監視回路が前記ブートストラップコンデンサの電圧異常を検出する毎に、前記予め定めた時間のカウントを新たに開始することを特徴とする、請求項1に記載の電力変換装置。
【請求項4】
前記電圧監視回路は、前記ブートストラップコンデンサの電圧が所定の閾値電圧以下であれば異常であると判断することを特徴とする、請求項1に記載の電力変換装置。
【請求項5】
前記所定の閾値電圧は、前記上アームスイッチング素子が安定したスイッチング動作を確保できる値に基づいて決定されることを特徴とする、請求項4に記載の電力変換装置。
【請求項1】
上アームスイッチング素子と下アームスイッチング素子とが直列接続されたインバータと、ブートストラップコンデンサから供給される電圧で作動し、当該上アームスイッチング素子を動作させる駆動信号を供給する駆動回路とを備える、電力変換装置であって、
前記ブートストラップコンデンサの電圧を監視し、当該電圧の異常検出に応じて、前記駆動回路から前記上アームスイッチング素子への前記駆動信号の出力供給を停止させる電圧監視回路と、
前記電圧監視回路が前記駆動信号の出力供給を停止させる期間を制御する停止期間制御回路とを備える、電力変換装置。
【請求項2】
前記停止期間制御回路は、前記駆動信号の出力供給を停止させる期間を、前記上アームスイッチング素子のオン動作を指示する信号とオフ動作を指示する信号とが交互に繰り返されるドライバ駆動周期の1サイクルを超える予め定めた時間に設定していることを特徴とする、請求項1に記載の電力変換装置。
【請求項3】
前記停止期間制御回路は、前記電圧監視回路が前記ブートストラップコンデンサの電圧異常を検出する毎に、前記予め定めた時間のカウントを新たに開始することを特徴とする、請求項1に記載の電力変換装置。
【請求項4】
前記電圧監視回路は、前記ブートストラップコンデンサの電圧が所定の閾値電圧以下であれば異常であると判断することを特徴とする、請求項1に記載の電力変換装置。
【請求項5】
前記所定の閾値電圧は、前記上アームスイッチング素子が安定したスイッチング動作を確保できる値に基づいて決定されることを特徴とする、請求項4に記載の電力変換装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−85419(P2013−85419A)
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願番号】特願2011−224722(P2011−224722)
【出願日】平成23年10月12日(2011.10.12)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願日】平成23年10月12日(2011.10.12)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]