
電動アシスト自転車
【課題】走行環境に応じた適切な補助動力を加えることのできる電動アシスト自転車を提供する。
【解決手段】電動アシスト自転車は、自転車の走行速度およびクランク軸に加わるトルクを変数として、種々の走行環境負荷が予め定められた走行環境負荷設定テーブルを有する。そして、トルク検出ユニット43により検出されるトルクと、走行速度検出ユニット42により検出される走行速度を上記テーブルに当てはめて、走行環境負荷を検出する。そして、検出した負荷に基づいて、人力駆動系に対する電力駆動系の駆動力の割合(アシスト比率)を設定し、設定された割合で電力駆動系が補助駆動力を発生する制御ユニット31を有する。
【解決手段】電動アシスト自転車は、自転車の走行速度およびクランク軸に加わるトルクを変数として、種々の走行環境負荷が予め定められた走行環境負荷設定テーブルを有する。そして、トルク検出ユニット43により検出されるトルクと、走行速度検出ユニット42により検出される走行速度を上記テーブルに当てはめて、走行環境負荷を検出する。そして、検出した負荷に基づいて、人力駆動系に対する電力駆動系の駆動力の割合(アシスト比率)を設定し、設定された割合で電力駆動系が補助駆動力を発生する制御ユニット31を有する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、ペダルに加えられる踏力を伝達する人力駆動系と、電動ユニットによる補助動力を伝達する電力駆動系とを有する電動アシスト自転車の改良に関する。
【背景技術】
【0002】
近年、電動モータなどの電動ユニットによる動力を伝達する電力駆動系の補助動力を、運転者がペダルを踏むことによる生じる人力駆動系に加えて作用させ、走行を補助することで、運転者がペダルを踏む力を軽減させる電動アシスト自転車が知られている。
このような電動アシスト自転車において、高速走行時に、補助動力を減少させて、自転車に適した車速を保った走行を行わせるようにしたものが提案されている(たとえば特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平6−107266号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記特許文献1記載の発明は、ペダルに加わる運転者の踏力に応じてアシスト比率を算出し、高速域、中速域、低速域と走行速度が遅くなるほど、補助動力が相対的に強くなるように、走行速度に応じた補助動力を加えるように制御している。このため、踏力と走行速度が同じであれば、平地などの運転者に比較的負荷の小さい環境を走行する場合であっても、登坂時や重い荷物を搭載した状態などの運転者に比較的負荷の大きい環境を走行する場合であっても、同じ補助動力が加わることになる。
【0005】
つまり、上記特許文献1記載の発明では、ペダルに加わる踏力に応じてアシスト比率を算出するとともに、走行速度に応じた補助動力を加えるように制御しているけれども、走行環境における負荷の大小を考慮したアシスト比率を設定していない。このため、運転者にとって比較的負荷の小さい環境を走行する場合と、運転者にとって比較的負荷の大きい環境を走行する場合とで、同じアシスト比率に基づく補助動力を加える。よって、走行環境における負荷が大小変化した時、適切な補助動力が得られないという課題があった。
【0006】
この発明は、かかる背景のもとでなされたもので、走行環境に応じた適切な補助動力を加えることのできる電動アシスト自転車を提供することを目的とする。
【課題を解決するための手段】
【0007】
請求項1記載の発明は、電動アシスト自転車であって、ペダルおよびクランクを含み、前記ペダルに加えられる人的な踏力によってクランクが回転し、駆動力を発生させるための人力駆動系と、電力が蓄えられるバッテリーユニットと、前記バッテリーユニットから出力される電力によって補助駆動力を発生させるための電力駆動系と、前記ペダルに加えられる踏力により、前記クランクに加わるトルクを検出するためのトルク検出ユニットと、自転車の走行速度を検出するための走行速度検出ユニットと、自転車の走行速度およびクランクに加わるトルクを変数として、種々の走行環境負荷が予め定められた走行環境負荷設定テーブルと、前記トルク検出ユニットにより検出されるトルクと、前記走行速度検出ユニットにより検出される走行速度を前記テーブルに当てはめて、走行環境負荷を検出するための走行環境負荷検出手段と、前記走行環境負荷検出手段の検出した負荷に基づいて、前記人力駆動系に対する前記電力駆動系の駆動力の割合を設定するアシスト比率設定手段と、前記アシスト比率設定手段で設定された割合で、前記電力駆動系が補助駆動力を発生するように制御する制御ユニットと、を含むことを特徴とする、電動アシスト自転車である。
【0008】
請求項2記載の発明は、前記制御ユニットは、クランクが半回転する毎に、前記トルク検出ユニットの検出トルクに基づいて、前記アシスト比率設定手段で設定された割合で前記電力駆動系が動作しているか否かを判別し、前記アシスト比率設定手段で設定された割合になるように、前記電力駆動系の駆動力の割合を段階的に増加させることを特徴とする、請求項1記載の電動アシスト自転車である。
【0009】
請求項3記載の発明は、前記電力駆動系は、自転車の前輪のハブに備えられ、前輪を駆動するための電動モータを含むことを特徴とする、請求項1または2記載の電動アシスト自転車である。
請求項4記載の発明は、前記制御ユニットは、自転車が停止状態から走行を開始する際には、前記アシスト比率設定手段で設定されたアシスト比率にかかわらず、前記電力駆動系の駆動力の割合を多くすることを特徴とする、請求項1〜3のいずれかに記載の電動アシスト自転車である。
【0010】
請求項5記載の発明は、前記走行環境負荷設定テーブルには、自転車の走行速度およびクランク軸に加わるトルクに加え、自転車の変速段に応じた走行環境負荷が定められていることを特徴とする、請求項1記載の電動アシスト自転車である。
請求項6記載の発明は、電動アシスト自転車は、さらに、ペダルの踏力を後輪に伝達する際に、クランクの回転数と後輪の回転数との割合を変化させる変速機と、前記変速機の変速段を判定する変速段判定手段とを有し、前記走行環境負荷検出手段は、変速段判定手段の判定結果に対応した走行環境負荷を、前記走行環境負荷設定テーブルから検出することを特徴とする、請求項5記載の電動アシスト自転車である。
【発明の効果】
【0011】
この発明によれば、自転車が走行する走行環境の違い、例えば、坂道の傾斜角度、搭載した荷物の荷重、向かい風等に応じて、適切な補助駆動力を加えることができ、運転者にフレンドリーな電動アシスト自転車とすることができる。
また、アシスト比率は、クランク半回転毎に変更するので、運転状態に応じて補助駆動力がスムーズに変更される電動アシスト自転車となる。
【0012】
さらに、この発明では、補助駆動力を生じる電動モーターが、前輪に装備されているので、後輪は人力で駆動され、前輪は電力で補助駆動されるダブル駆動の電動アシスト自転車となる。
また、この発明の電動アシスト自転車は、発車時の漕ぎ出しがスムーズで、軽い踏力で発車できる。
【0013】
さらに、この発明の電動アシスト自転車は、変速機の変速機能を有効利用し、快適な踏力で運転できる。
【図面の簡単な説明】
【0014】
【図1】この発明の一実施形態に係る電動アシスト自転車の側面図である。
【図2】この発明の一実施形態に係る電動アシスト自転車10の電動ユニットおよび制御回路系統の構成例を示すブロック図である。
【図3】ユニットの具体例を示す平面図である。
【図4】制御装置の制御動作を表わすフローチャートである。
【図5】走行環境負荷として、登坂判定用のデータテーブルの一例を示すグラフである。
【発明を実施するための形態】
【0015】
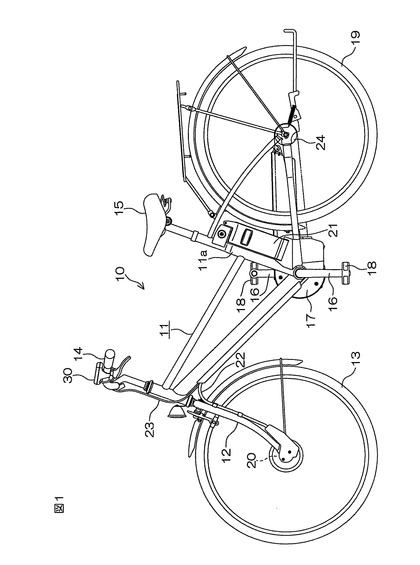
図1は、この発明の一実施形態に係る電動アシスト自転車の側面図であり、図2は、電動アシスト自転車の電動ユニットおよび制御回路系統の構成を示すブロック図である。
図1を参照して、電動アシスト自転車10は、フレーム11、フレーム11の前部に備えられた前ホーク12、前ホーク12に取り付けられた前輪13、前ホーク12を介して前輪13を操作するためのハンドルバー14、フレーム11に取り付けられたサドル15、フレーム11に備えられたクランク16およびギヤユニット17、クランク16に取り付けられたペダル18、フレーム11の後部に取り付けられた後輪19等の、自転車としての基本構成を有している。
【0016】
電動アシスト自転車10は、前輪13のハブに配された電動モータ20を備えている。また、フレーム11のサドル支持部11aに着脱可能に取り付けられたバッテリーユニット21を有している。さらに、ハンドルバー14には、表示操作制御部としてのスイッチユニット30が取り付けられている。電動モータ20、バッテリーユニット21およびスイッチユニット30は、接続コード22、23等によって電気的に接続されている。
【0017】
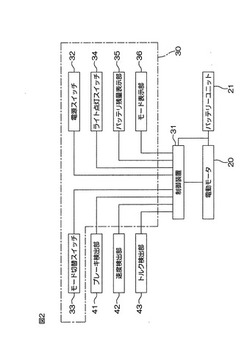
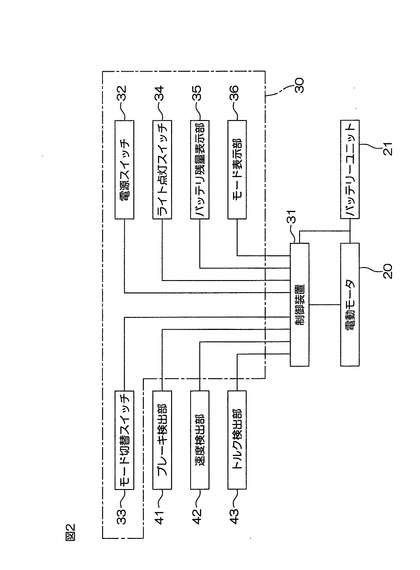
図2を参照して、電動ユニットおよび制御回路系統の説明をする。
前輪13のハブに設けられた電動モータ20は、バッテリーユニット21から供給される電力によって前輪13を回転させ、駆動力を発生させる。また、下り坂等において、電動モータ20の回転速度よりも前輪13の回転速度の方が速くなった場合、電動モータ20は回生制動によりバッテリーユニット21を充電する。
【0018】
電動アシスト自転車10には、電動モータ20およびバッテリーユニット21に接続された制御装置31が備えられている。制御装置31は、たとえばワンチップマイコン等の電子回路を含み、後述する制御動作を実行する。また、制御装置31には、メモリが含まれており、制御動作時に必要な後述するデータテーブルが予め記憶されている。制御装置31には、スイッチユニット30が接続されており、スイッチユニット30には、電源スイッチ32、モード切替スイッチ33、ライト点灯スイッチ34、バッテリー残量表示部35およびモード表示部36が設けられている。制御装置31は、ギヤユニット17の近傍に設けられているが、その位置は、どこでもよく、スイッチユニット30内でもよいし、バッテリーユニット21内、またはその近傍でもよい。
【0019】
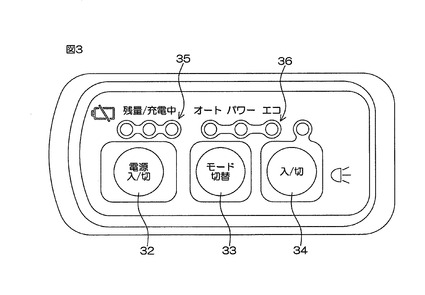
図3に、スイッチユニット30の平面図の一例を示す。
電源スイッチ32がオンされると、電動モータ20による補助駆動力の発生が可能な状態となる。モード切替スイッチ33は、運転者によって操作されるスイッチであり、「オートモード」「パワーモード」および「エコ充電モード」のいずれかの運転モードを設定するためのものである。「オートモード」では、通常走行時から坂道を下る場合のような自転車が自ら走行するような場合において、回生制動を利用して電動モータ20に発電電流を発生させ、バッテリーユニット21を充電することができる。エコ充電モードでは、平地を通常より低い人力駆動力で走行している、緩やかな下り坂を走行している、あるいは、追い風がある、等の運転者にとって比較的負荷が小さい走行環境を走行している場合に、回生制動を行い、バッテリーユニット21の充電を行う。パワーモードでは、オートモードよりアシスト比率を増大させた補助駆動力を発生させる。
【0020】
図2を参照して、制御装置31には、さらに、ブレーキ検出部41、速度検出部42およびトルク検出部43が接続されている。ブレーキ検出部41は、たとえばブレーキレバーまたはブレーキパッド等のブレーキ系統に備えられたセンサーを含み、ブレーキがかけられたか否かを検出するものである。速度検出部42は、たとえば前輪13または後輪19の回転速度を検知して、電動アシスト自転車10の走行速度を検出するためのものである。トルク検出部43は、例えば、クランク16およびギヤユニット17に設けられていて、ペダル18からクランク16を介してギヤユニット17内のギヤに加えられるトルク、すなわち運転者による踏力に対応するトルクを検出するものである。
【0021】
これらブレーキ検出部41、速度検出部42およびトルク検出部43の具体的な構成は、種々の構成が考えられ、既に公知の機構であるから、ここでの詳細な説明については省略する。
図1を参照して、後輪19の中心に位置するハブ24内には、図示しないが変速機が備えられている。変速機は、ハンドルバー14に備えられた変速レバー(図示せず)により変速段が切換えられる。また、制御装置31は、トルク検出部43の出力に基づいて、ペダル18が1回転漕がれる間隔を検出し、速度検出部42の出力に基づいてペダル18が1回転漕がれる間の電動モータ20の回転数を算出することにより、変速機の変速段を自動的に判定することができる。
【0022】
なお、変速レバーからの信号を取り込み、制御装置31が変速段を検出できる構成としてもよい。
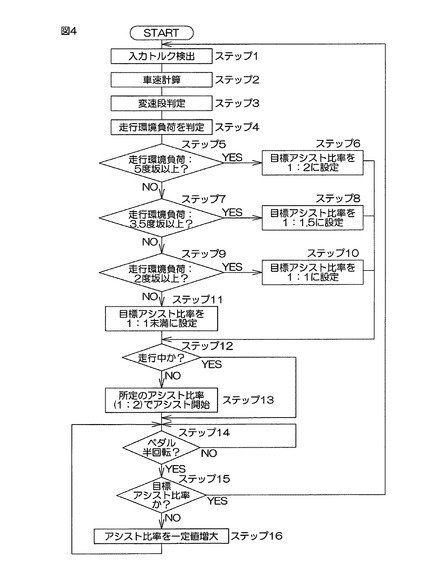
図4は、制御装置31により行われる制御動作を示すフローチャートである。すなわち、この実施形態に係る電動アシスト自転車10の走行環境負荷判定制御動作を表わすフローチャートである。
【0023】
図4のフローチャートの流れに従って、制御装置31による制御動作を説明する。
電動アシスト自転車10に運転者が乗り、電源スイッチ32をオンにした後、運転者がペダル18を踏む。すると、クランク16を介してギヤユニット17に加わるトルクが、ギヤユニット17内に備えられたトルク検出部43で検出され、制御装置31へ与えられる。つまり、入力トルクが検出される(ステップ1)。また、速度検出部42により自転車10の走行速度が検出され、制御装置31へ与えられる(ステップ2)。なお、この実施形態では、速度検出部42は、電動モータ20の回転速度に基づいて自転車10の走行速度を算出する構成となっている。制御装置31は、トルク検出部43からの入力トルクと速度検出部42からの走行速度とに基づいて、変速機24の変速段を判定する(ステップ3)。
【0024】
そして、入力トルク、走行速度および変速段に基づいて、メモリに記憶されている(予めメモリに設定されている)データテーブルから、現在の走行環境負荷を判定する。すなわち、たとえば、平地走行状態か、緩やかな登坂走行状態か、急な登坂走行状態か、あるいは、下り坂走行状態か、等の走行環境負荷を判定する(ステップ4)。走行環境負荷としては、走行路の傾斜角度以外に、向かい風の走行状態か、荷物を積載した走行状態か、等がある。また、変速機の変速段と自転車の走行速度毎にも、走行環境負荷に応じたトルクがデータテーブルとして予め設定されており、この予め設定されたデータテーブルとトルク検出部の検出したトルクとを比較して走行環境負荷を判定するようになっている。
【0025】
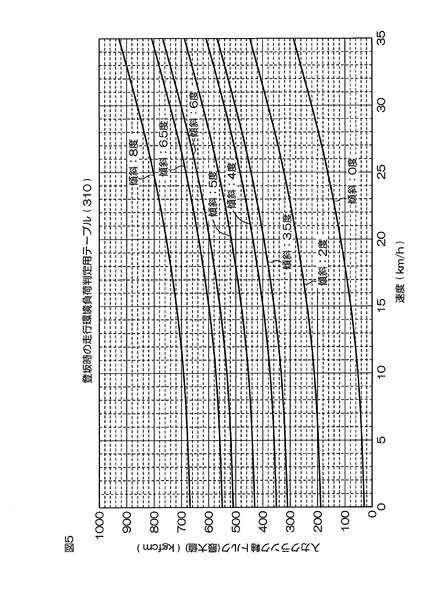
一例として、図5に、予め設定されている登坂時の走行環境負荷判定用のデータテーブル310を示す。
図5において、横軸は自転車の走行速度であり、縦軸は入力クランク軸トルクを示している。図5において、たとえば走行速度15km/hで走行している場合を考えると、平地走行では入力クランク軸トルクは80kgfcmであるが、走行路の傾斜が上り2度であれば、入力クランク軸トルクは240kgfcmに増加する。さらに、走行路の傾斜が上り4度となった場合には、入力クランク軸トルクは400kgfcmとなる。
【0026】
このように、自転車の走行速度が一定速度であっても、走行環境負荷、すなわち走行路の傾斜角度が異なれば、クランク軸に加えるべきトルク値が大きく変化する。
この実施形態では、かかる登坂判定用入力クランク軸トルクを予めデータテーブル等に記憶しており、このデータテーブルに走行速度と入力クランク軸トルクとを当てはめることによって、走行環境負荷を判定している。
【0027】
なお、図5では、変速機の変速段については説明を割愛したが、変速段も考慮した走行環境負荷の判定を行うのが好ましい。
図4を参照して、制御装置31は、ステップ4で走行環境負荷を判定し、ステップ5において、走行環境負荷が、5度坂以上か否かの判定をする(ステップ5)。そして、走行環境負荷が5度坂以上であれば、目標アシスト比率をたとえば1:2に設定する(ステップ6)。
【0028】
また、ステップ5で、走行環境負荷が5度坂以上でないと判定すると、次いで、3.5度坂以上か否かの判定をする(ステップ7)。そして、ステップ7の判定が肯定されれば、目標アシスト比率を、たとえば1:1.5に設定する(ステップ8)。
さらに、ステップ7の判定が否定された場合は、走行環境負荷が2度坂以上か否かの判定をする(ステップ9)。そして、走行環境負荷が2度坂以上であれば、目標アシスト比率を、たとえば1:1に設定する(ステップ10)。
【0029】
このように、走行環境負荷が、大、中、小に応じて、それぞれ、目標アシスト比率を、大、中、小に設定する。
ステップ9において、走行環境負荷が2度坂以上でない場合には、目標アシスト比率を、たとえば1:1未満の極小比率に設定する(ステップ11)。
次に、速度検出部42の出力に基づいて、走行中か否かを判断し(ステップ12)、走行中でなければ、漕ぎ始め用として定められた所定のアシスト比率(たとえば、1:2のアシスト比率)でアシストを開始する(ステップ13)。すなわち、漕ぎ始め開始時には、自転車10は停止状態から動き始めるため大きな駆動力が必要であるから、その際には大きな補助駆動力を電動モータ20に発生させる。
【0030】
そして、走行中には、ペダル18が1漕ぎされる半回転するごとに(クランク16が半回転するごとに)(ステップ14)、アシスト比率が設定された目標アシスト比率に達したか否かが判断される(ステップ15)。そして、目標アシスト比率に達していなければ、アシスト比率を一定値ずつ増大させる(ステップ16)。増大させる一定値のアシスト比率は、アシスト比率の急激な増大とならないように定められている。また、ペダル半回転毎、すなわち1漕ぎ毎に(ステップ14)、徐々にアシスト比率を増大させる(ステップ16)ように設定されているので、安全かつスムーズに補助駆動力を増大させることができる。
【0031】
このように、ステップ16において、一定値ずつアシスト比率を増大させ、ステップ15において、目標アシスト比率に達するまでアシスト比率を増大させる。そして目標アシスト比率に達すると、ステップ1に戻り、目標アシスト比率での走行を継続する。
また、走行環境負荷が大きい状態から小さい状態に移行した場合には、走行環境負荷が変化した状態を所定時間、たとえば約1秒継続すると、トルク検出部43の検出したトルクに基づいて、目標アシスト比率を小さく設定し、現在のアシスト比率から、新たな目標アシスト比率(小さな目標アシスト比率)になるようにアシスト比率を随時低下させる。
【0032】
この発明の電動アシスト自転車10は、図1で説明したように、前輪13に補助駆動力を与える構成としたが、これに限らず、後輪19に補助駆動力を与える構成であってもよい。また、後輪19に変速機が設けられた構成としたが、変速機のない自転車としてもよい。変速機をなくした場合には、変速段は考慮に入れず、走行環境負荷の大、中、小等を判別すればよい。
【0033】
この発明は、以上に説明した実施形態に限定されるものではなく、請求項記載の範囲内において種々の変更が可能である。
この発明は、坂道の傾斜角度、搭載した荷物の荷重、向かい風等の走行環境負荷に応じた補助駆動力を加える電動アシスト自転車に利用可能である。
【符号の説明】
【0034】
10 電動アシスト自転車
13 前輪
16 クランク
18 ペダル
20 電動モータ(電力駆動系)
21 バッテリーユニット
31 制御装置(走行環境負荷検出手段、アシスト比率設定手段、制御ユニット)
42 速度検出部(走行速度検出ユニット)
43 トルク検出部(トルク検出ユニット)
310 データテーブル(走行環境負荷設定テーブル)
【技術分野】
【0001】
この発明は、ペダルに加えられる踏力を伝達する人力駆動系と、電動ユニットによる補助動力を伝達する電力駆動系とを有する電動アシスト自転車の改良に関する。
【背景技術】
【0002】
近年、電動モータなどの電動ユニットによる動力を伝達する電力駆動系の補助動力を、運転者がペダルを踏むことによる生じる人力駆動系に加えて作用させ、走行を補助することで、運転者がペダルを踏む力を軽減させる電動アシスト自転車が知られている。
このような電動アシスト自転車において、高速走行時に、補助動力を減少させて、自転車に適した車速を保った走行を行わせるようにしたものが提案されている(たとえば特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平6−107266号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記特許文献1記載の発明は、ペダルに加わる運転者の踏力に応じてアシスト比率を算出し、高速域、中速域、低速域と走行速度が遅くなるほど、補助動力が相対的に強くなるように、走行速度に応じた補助動力を加えるように制御している。このため、踏力と走行速度が同じであれば、平地などの運転者に比較的負荷の小さい環境を走行する場合であっても、登坂時や重い荷物を搭載した状態などの運転者に比較的負荷の大きい環境を走行する場合であっても、同じ補助動力が加わることになる。
【0005】
つまり、上記特許文献1記載の発明では、ペダルに加わる踏力に応じてアシスト比率を算出するとともに、走行速度に応じた補助動力を加えるように制御しているけれども、走行環境における負荷の大小を考慮したアシスト比率を設定していない。このため、運転者にとって比較的負荷の小さい環境を走行する場合と、運転者にとって比較的負荷の大きい環境を走行する場合とで、同じアシスト比率に基づく補助動力を加える。よって、走行環境における負荷が大小変化した時、適切な補助動力が得られないという課題があった。
【0006】
この発明は、かかる背景のもとでなされたもので、走行環境に応じた適切な補助動力を加えることのできる電動アシスト自転車を提供することを目的とする。
【課題を解決するための手段】
【0007】
請求項1記載の発明は、電動アシスト自転車であって、ペダルおよびクランクを含み、前記ペダルに加えられる人的な踏力によってクランクが回転し、駆動力を発生させるための人力駆動系と、電力が蓄えられるバッテリーユニットと、前記バッテリーユニットから出力される電力によって補助駆動力を発生させるための電力駆動系と、前記ペダルに加えられる踏力により、前記クランクに加わるトルクを検出するためのトルク検出ユニットと、自転車の走行速度を検出するための走行速度検出ユニットと、自転車の走行速度およびクランクに加わるトルクを変数として、種々の走行環境負荷が予め定められた走行環境負荷設定テーブルと、前記トルク検出ユニットにより検出されるトルクと、前記走行速度検出ユニットにより検出される走行速度を前記テーブルに当てはめて、走行環境負荷を検出するための走行環境負荷検出手段と、前記走行環境負荷検出手段の検出した負荷に基づいて、前記人力駆動系に対する前記電力駆動系の駆動力の割合を設定するアシスト比率設定手段と、前記アシスト比率設定手段で設定された割合で、前記電力駆動系が補助駆動力を発生するように制御する制御ユニットと、を含むことを特徴とする、電動アシスト自転車である。
【0008】
請求項2記載の発明は、前記制御ユニットは、クランクが半回転する毎に、前記トルク検出ユニットの検出トルクに基づいて、前記アシスト比率設定手段で設定された割合で前記電力駆動系が動作しているか否かを判別し、前記アシスト比率設定手段で設定された割合になるように、前記電力駆動系の駆動力の割合を段階的に増加させることを特徴とする、請求項1記載の電動アシスト自転車である。
【0009】
請求項3記載の発明は、前記電力駆動系は、自転車の前輪のハブに備えられ、前輪を駆動するための電動モータを含むことを特徴とする、請求項1または2記載の電動アシスト自転車である。
請求項4記載の発明は、前記制御ユニットは、自転車が停止状態から走行を開始する際には、前記アシスト比率設定手段で設定されたアシスト比率にかかわらず、前記電力駆動系の駆動力の割合を多くすることを特徴とする、請求項1〜3のいずれかに記載の電動アシスト自転車である。
【0010】
請求項5記載の発明は、前記走行環境負荷設定テーブルには、自転車の走行速度およびクランク軸に加わるトルクに加え、自転車の変速段に応じた走行環境負荷が定められていることを特徴とする、請求項1記載の電動アシスト自転車である。
請求項6記載の発明は、電動アシスト自転車は、さらに、ペダルの踏力を後輪に伝達する際に、クランクの回転数と後輪の回転数との割合を変化させる変速機と、前記変速機の変速段を判定する変速段判定手段とを有し、前記走行環境負荷検出手段は、変速段判定手段の判定結果に対応した走行環境負荷を、前記走行環境負荷設定テーブルから検出することを特徴とする、請求項5記載の電動アシスト自転車である。
【発明の効果】
【0011】
この発明によれば、自転車が走行する走行環境の違い、例えば、坂道の傾斜角度、搭載した荷物の荷重、向かい風等に応じて、適切な補助駆動力を加えることができ、運転者にフレンドリーな電動アシスト自転車とすることができる。
また、アシスト比率は、クランク半回転毎に変更するので、運転状態に応じて補助駆動力がスムーズに変更される電動アシスト自転車となる。
【0012】
さらに、この発明では、補助駆動力を生じる電動モーターが、前輪に装備されているので、後輪は人力で駆動され、前輪は電力で補助駆動されるダブル駆動の電動アシスト自転車となる。
また、この発明の電動アシスト自転車は、発車時の漕ぎ出しがスムーズで、軽い踏力で発車できる。
【0013】
さらに、この発明の電動アシスト自転車は、変速機の変速機能を有効利用し、快適な踏力で運転できる。
【図面の簡単な説明】
【0014】
【図1】この発明の一実施形態に係る電動アシスト自転車の側面図である。
【図2】この発明の一実施形態に係る電動アシスト自転車10の電動ユニットおよび制御回路系統の構成例を示すブロック図である。
【図3】ユニットの具体例を示す平面図である。
【図4】制御装置の制御動作を表わすフローチャートである。
【図5】走行環境負荷として、登坂判定用のデータテーブルの一例を示すグラフである。
【発明を実施するための形態】
【0015】
図1は、この発明の一実施形態に係る電動アシスト自転車の側面図であり、図2は、電動アシスト自転車の電動ユニットおよび制御回路系統の構成を示すブロック図である。
図1を参照して、電動アシスト自転車10は、フレーム11、フレーム11の前部に備えられた前ホーク12、前ホーク12に取り付けられた前輪13、前ホーク12を介して前輪13を操作するためのハンドルバー14、フレーム11に取り付けられたサドル15、フレーム11に備えられたクランク16およびギヤユニット17、クランク16に取り付けられたペダル18、フレーム11の後部に取り付けられた後輪19等の、自転車としての基本構成を有している。
【0016】
電動アシスト自転車10は、前輪13のハブに配された電動モータ20を備えている。また、フレーム11のサドル支持部11aに着脱可能に取り付けられたバッテリーユニット21を有している。さらに、ハンドルバー14には、表示操作制御部としてのスイッチユニット30が取り付けられている。電動モータ20、バッテリーユニット21およびスイッチユニット30は、接続コード22、23等によって電気的に接続されている。
【0017】
図2を参照して、電動ユニットおよび制御回路系統の説明をする。
前輪13のハブに設けられた電動モータ20は、バッテリーユニット21から供給される電力によって前輪13を回転させ、駆動力を発生させる。また、下り坂等において、電動モータ20の回転速度よりも前輪13の回転速度の方が速くなった場合、電動モータ20は回生制動によりバッテリーユニット21を充電する。
【0018】
電動アシスト自転車10には、電動モータ20およびバッテリーユニット21に接続された制御装置31が備えられている。制御装置31は、たとえばワンチップマイコン等の電子回路を含み、後述する制御動作を実行する。また、制御装置31には、メモリが含まれており、制御動作時に必要な後述するデータテーブルが予め記憶されている。制御装置31には、スイッチユニット30が接続されており、スイッチユニット30には、電源スイッチ32、モード切替スイッチ33、ライト点灯スイッチ34、バッテリー残量表示部35およびモード表示部36が設けられている。制御装置31は、ギヤユニット17の近傍に設けられているが、その位置は、どこでもよく、スイッチユニット30内でもよいし、バッテリーユニット21内、またはその近傍でもよい。
【0019】
図3に、スイッチユニット30の平面図の一例を示す。
電源スイッチ32がオンされると、電動モータ20による補助駆動力の発生が可能な状態となる。モード切替スイッチ33は、運転者によって操作されるスイッチであり、「オートモード」「パワーモード」および「エコ充電モード」のいずれかの運転モードを設定するためのものである。「オートモード」では、通常走行時から坂道を下る場合のような自転車が自ら走行するような場合において、回生制動を利用して電動モータ20に発電電流を発生させ、バッテリーユニット21を充電することができる。エコ充電モードでは、平地を通常より低い人力駆動力で走行している、緩やかな下り坂を走行している、あるいは、追い風がある、等の運転者にとって比較的負荷が小さい走行環境を走行している場合に、回生制動を行い、バッテリーユニット21の充電を行う。パワーモードでは、オートモードよりアシスト比率を増大させた補助駆動力を発生させる。
【0020】
図2を参照して、制御装置31には、さらに、ブレーキ検出部41、速度検出部42およびトルク検出部43が接続されている。ブレーキ検出部41は、たとえばブレーキレバーまたはブレーキパッド等のブレーキ系統に備えられたセンサーを含み、ブレーキがかけられたか否かを検出するものである。速度検出部42は、たとえば前輪13または後輪19の回転速度を検知して、電動アシスト自転車10の走行速度を検出するためのものである。トルク検出部43は、例えば、クランク16およびギヤユニット17に設けられていて、ペダル18からクランク16を介してギヤユニット17内のギヤに加えられるトルク、すなわち運転者による踏力に対応するトルクを検出するものである。
【0021】
これらブレーキ検出部41、速度検出部42およびトルク検出部43の具体的な構成は、種々の構成が考えられ、既に公知の機構であるから、ここでの詳細な説明については省略する。
図1を参照して、後輪19の中心に位置するハブ24内には、図示しないが変速機が備えられている。変速機は、ハンドルバー14に備えられた変速レバー(図示せず)により変速段が切換えられる。また、制御装置31は、トルク検出部43の出力に基づいて、ペダル18が1回転漕がれる間隔を検出し、速度検出部42の出力に基づいてペダル18が1回転漕がれる間の電動モータ20の回転数を算出することにより、変速機の変速段を自動的に判定することができる。
【0022】
なお、変速レバーからの信号を取り込み、制御装置31が変速段を検出できる構成としてもよい。
図4は、制御装置31により行われる制御動作を示すフローチャートである。すなわち、この実施形態に係る電動アシスト自転車10の走行環境負荷判定制御動作を表わすフローチャートである。
【0023】
図4のフローチャートの流れに従って、制御装置31による制御動作を説明する。
電動アシスト自転車10に運転者が乗り、電源スイッチ32をオンにした後、運転者がペダル18を踏む。すると、クランク16を介してギヤユニット17に加わるトルクが、ギヤユニット17内に備えられたトルク検出部43で検出され、制御装置31へ与えられる。つまり、入力トルクが検出される(ステップ1)。また、速度検出部42により自転車10の走行速度が検出され、制御装置31へ与えられる(ステップ2)。なお、この実施形態では、速度検出部42は、電動モータ20の回転速度に基づいて自転車10の走行速度を算出する構成となっている。制御装置31は、トルク検出部43からの入力トルクと速度検出部42からの走行速度とに基づいて、変速機24の変速段を判定する(ステップ3)。
【0024】
そして、入力トルク、走行速度および変速段に基づいて、メモリに記憶されている(予めメモリに設定されている)データテーブルから、現在の走行環境負荷を判定する。すなわち、たとえば、平地走行状態か、緩やかな登坂走行状態か、急な登坂走行状態か、あるいは、下り坂走行状態か、等の走行環境負荷を判定する(ステップ4)。走行環境負荷としては、走行路の傾斜角度以外に、向かい風の走行状態か、荷物を積載した走行状態か、等がある。また、変速機の変速段と自転車の走行速度毎にも、走行環境負荷に応じたトルクがデータテーブルとして予め設定されており、この予め設定されたデータテーブルとトルク検出部の検出したトルクとを比較して走行環境負荷を判定するようになっている。
【0025】
一例として、図5に、予め設定されている登坂時の走行環境負荷判定用のデータテーブル310を示す。
図5において、横軸は自転車の走行速度であり、縦軸は入力クランク軸トルクを示している。図5において、たとえば走行速度15km/hで走行している場合を考えると、平地走行では入力クランク軸トルクは80kgfcmであるが、走行路の傾斜が上り2度であれば、入力クランク軸トルクは240kgfcmに増加する。さらに、走行路の傾斜が上り4度となった場合には、入力クランク軸トルクは400kgfcmとなる。
【0026】
このように、自転車の走行速度が一定速度であっても、走行環境負荷、すなわち走行路の傾斜角度が異なれば、クランク軸に加えるべきトルク値が大きく変化する。
この実施形態では、かかる登坂判定用入力クランク軸トルクを予めデータテーブル等に記憶しており、このデータテーブルに走行速度と入力クランク軸トルクとを当てはめることによって、走行環境負荷を判定している。
【0027】
なお、図5では、変速機の変速段については説明を割愛したが、変速段も考慮した走行環境負荷の判定を行うのが好ましい。
図4を参照して、制御装置31は、ステップ4で走行環境負荷を判定し、ステップ5において、走行環境負荷が、5度坂以上か否かの判定をする(ステップ5)。そして、走行環境負荷が5度坂以上であれば、目標アシスト比率をたとえば1:2に設定する(ステップ6)。
【0028】
また、ステップ5で、走行環境負荷が5度坂以上でないと判定すると、次いで、3.5度坂以上か否かの判定をする(ステップ7)。そして、ステップ7の判定が肯定されれば、目標アシスト比率を、たとえば1:1.5に設定する(ステップ8)。
さらに、ステップ7の判定が否定された場合は、走行環境負荷が2度坂以上か否かの判定をする(ステップ9)。そして、走行環境負荷が2度坂以上であれば、目標アシスト比率を、たとえば1:1に設定する(ステップ10)。
【0029】
このように、走行環境負荷が、大、中、小に応じて、それぞれ、目標アシスト比率を、大、中、小に設定する。
ステップ9において、走行環境負荷が2度坂以上でない場合には、目標アシスト比率を、たとえば1:1未満の極小比率に設定する(ステップ11)。
次に、速度検出部42の出力に基づいて、走行中か否かを判断し(ステップ12)、走行中でなければ、漕ぎ始め用として定められた所定のアシスト比率(たとえば、1:2のアシスト比率)でアシストを開始する(ステップ13)。すなわち、漕ぎ始め開始時には、自転車10は停止状態から動き始めるため大きな駆動力が必要であるから、その際には大きな補助駆動力を電動モータ20に発生させる。
【0030】
そして、走行中には、ペダル18が1漕ぎされる半回転するごとに(クランク16が半回転するごとに)(ステップ14)、アシスト比率が設定された目標アシスト比率に達したか否かが判断される(ステップ15)。そして、目標アシスト比率に達していなければ、アシスト比率を一定値ずつ増大させる(ステップ16)。増大させる一定値のアシスト比率は、アシスト比率の急激な増大とならないように定められている。また、ペダル半回転毎、すなわち1漕ぎ毎に(ステップ14)、徐々にアシスト比率を増大させる(ステップ16)ように設定されているので、安全かつスムーズに補助駆動力を増大させることができる。
【0031】
このように、ステップ16において、一定値ずつアシスト比率を増大させ、ステップ15において、目標アシスト比率に達するまでアシスト比率を増大させる。そして目標アシスト比率に達すると、ステップ1に戻り、目標アシスト比率での走行を継続する。
また、走行環境負荷が大きい状態から小さい状態に移行した場合には、走行環境負荷が変化した状態を所定時間、たとえば約1秒継続すると、トルク検出部43の検出したトルクに基づいて、目標アシスト比率を小さく設定し、現在のアシスト比率から、新たな目標アシスト比率(小さな目標アシスト比率)になるようにアシスト比率を随時低下させる。
【0032】
この発明の電動アシスト自転車10は、図1で説明したように、前輪13に補助駆動力を与える構成としたが、これに限らず、後輪19に補助駆動力を与える構成であってもよい。また、後輪19に変速機が設けられた構成としたが、変速機のない自転車としてもよい。変速機をなくした場合には、変速段は考慮に入れず、走行環境負荷の大、中、小等を判別すればよい。
【0033】
この発明は、以上に説明した実施形態に限定されるものではなく、請求項記載の範囲内において種々の変更が可能である。
この発明は、坂道の傾斜角度、搭載した荷物の荷重、向かい風等の走行環境負荷に応じた補助駆動力を加える電動アシスト自転車に利用可能である。
【符号の説明】
【0034】
10 電動アシスト自転車
13 前輪
16 クランク
18 ペダル
20 電動モータ(電力駆動系)
21 バッテリーユニット
31 制御装置(走行環境負荷検出手段、アシスト比率設定手段、制御ユニット)
42 速度検出部(走行速度検出ユニット)
43 トルク検出部(トルク検出ユニット)
310 データテーブル(走行環境負荷設定テーブル)
【特許請求の範囲】
【請求項1】
電動アシスト自転車であって、
ペダルおよびクランクを含み、前記ペダルに加えられる人的な踏力によってクランクが回転し、駆動力を発生させるための人力駆動系と、
電力が蓄えられるバッテリーユニットと、
前記バッテリーユニットから出力される電力によって補助駆動力を発生させるための電力駆動系と、
前記ペダルに加えられる踏力により、前記クランクに加わるトルクを検出するためのトルク検出ユニットと、
自転車の走行速度を検出するための走行速度検出ユニットと、
自転車の走行速度およびクランクに加わるトルクを変数として、種々の走行環境負荷が予め定められた走行環境負荷設定テーブルと、
前記トルク検出ユニットにより検出されるトルクと、前記走行速度検出ユニットにより検出される走行速度を前記テーブルに当てはめて、走行環境負荷を検出するための走行環境負荷検出手段と、
前記走行環境負荷検出手段の検出した負荷に基づいて、前記人力駆動系に対する前記電力駆動系の駆動力の割合を設定するアシスト比率設定手段と、
前記アシスト比率設定手段で設定された割合で、前記電力駆動系が補助駆動力を発生するように制御する制御ユニットと、
を含むことを特徴とする、電動アシスト自転車。
【請求項2】
前記制御ユニットは、クランクが半回転する毎に、前記トルク検出ユニットの検出トルクに基づいて、前記アシスト比率設定手段で設定された割合で前記電力駆動系が動作しているか否かを判別し、前記アシスト比率設定手段で設定された割合になるように、前記電力駆動系の駆動力の割合を段階的に増加させることを特徴とする、請求項1記載の電動アシスト自転車。
【請求項3】
前記電力駆動系は、自転車の前輪のハブに備えられ、前輪を駆動するための電動モータを含むことを特徴とする、請求項1または2記載の電動アシスト自転車。
【請求項4】
前記制御ユニットは、自転車が停止状態から走行を開始する際には、前記アシスト比率設定手段で設定されたアシスト比率にかかわらず、前記電力駆動系の駆動力の割合を多くすることを特徴とする、請求項1〜3のいずれかに記載の電動アシスト自転車。
【請求項5】
前記走行環境負荷設定テーブルには、自転車の走行速度およびクランク軸に加わるトルクに加え、自転車の変速段に応じた走行環境負荷が定められていることを特徴とする、請求項1記載の電動アシスト自転車。
【請求項6】
電動アシスト自転車は、さらに、ペダルの踏力を後輪に伝達する際に、クランクの回転数と後輪の回転数との割合を変化させる変速機と、
前記変速機の変速段を判定する変速段判定手段とを有し、
前記走行環境負荷検出手段は、変速段判定手段の判定結果に対応した走行環境負荷を、前記走行環境負荷設定テーブルから検出することを特徴とする、請求項5記載の電動アシスト自転車。
【請求項1】
電動アシスト自転車であって、
ペダルおよびクランクを含み、前記ペダルに加えられる人的な踏力によってクランクが回転し、駆動力を発生させるための人力駆動系と、
電力が蓄えられるバッテリーユニットと、
前記バッテリーユニットから出力される電力によって補助駆動力を発生させるための電力駆動系と、
前記ペダルに加えられる踏力により、前記クランクに加わるトルクを検出するためのトルク検出ユニットと、
自転車の走行速度を検出するための走行速度検出ユニットと、
自転車の走行速度およびクランクに加わるトルクを変数として、種々の走行環境負荷が予め定められた走行環境負荷設定テーブルと、
前記トルク検出ユニットにより検出されるトルクと、前記走行速度検出ユニットにより検出される走行速度を前記テーブルに当てはめて、走行環境負荷を検出するための走行環境負荷検出手段と、
前記走行環境負荷検出手段の検出した負荷に基づいて、前記人力駆動系に対する前記電力駆動系の駆動力の割合を設定するアシスト比率設定手段と、
前記アシスト比率設定手段で設定された割合で、前記電力駆動系が補助駆動力を発生するように制御する制御ユニットと、
を含むことを特徴とする、電動アシスト自転車。
【請求項2】
前記制御ユニットは、クランクが半回転する毎に、前記トルク検出ユニットの検出トルクに基づいて、前記アシスト比率設定手段で設定された割合で前記電力駆動系が動作しているか否かを判別し、前記アシスト比率設定手段で設定された割合になるように、前記電力駆動系の駆動力の割合を段階的に増加させることを特徴とする、請求項1記載の電動アシスト自転車。
【請求項3】
前記電力駆動系は、自転車の前輪のハブに備えられ、前輪を駆動するための電動モータを含むことを特徴とする、請求項1または2記載の電動アシスト自転車。
【請求項4】
前記制御ユニットは、自転車が停止状態から走行を開始する際には、前記アシスト比率設定手段で設定されたアシスト比率にかかわらず、前記電力駆動系の駆動力の割合を多くすることを特徴とする、請求項1〜3のいずれかに記載の電動アシスト自転車。
【請求項5】
前記走行環境負荷設定テーブルには、自転車の走行速度およびクランク軸に加わるトルクに加え、自転車の変速段に応じた走行環境負荷が定められていることを特徴とする、請求項1記載の電動アシスト自転車。
【請求項6】
電動アシスト自転車は、さらに、ペダルの踏力を後輪に伝達する際に、クランクの回転数と後輪の回転数との割合を変化させる変速機と、
前記変速機の変速段を判定する変速段判定手段とを有し、
前記走行環境負荷検出手段は、変速段判定手段の判定結果に対応した走行環境負荷を、前記走行環境負荷設定テーブルから検出することを特徴とする、請求項5記載の電動アシスト自転車。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2011−240919(P2011−240919A)
【公開日】平成23年12月1日(2011.12.1)
【国際特許分類】
【出願番号】特願2011−42415(P2011−42415)
【出願日】平成23年2月28日(2011.2.28)
【出願人】(000001889)三洋電機株式会社 (18,308)
【出願人】(000214892)三洋電機コンシューマエレクトロニクス株式会社 (1,582)
【公開日】平成23年12月1日(2011.12.1)
【国際特許分類】
【出願日】平成23年2月28日(2011.2.28)
【出願人】(000001889)三洋電機株式会社 (18,308)
【出願人】(000214892)三洋電機コンシューマエレクトロニクス株式会社 (1,582)
[ Back to top ]