
電動ディスクブレーキ
【課題】電動ディスクブレーキにおいて、非制動時のブレーキパッドとの接触によるディスクロータの偏摩耗を防止する。
【解決手段】電動モータ23の回転を差動減速機構18によって減速し、ボールランプ機構17によってピストン16の直線運動に変換し、ピストン16によってブレーキパッド10A、10Bをディスクロータ8に押圧して制動力を発生させる。非制動時には、電動モータ23を逆回転させてピストン16を後退させ、一定のパッドクリアランスを保持する。非制動時に、ピストン16の位置を維持しつつピストン16を後退させる方向に付勢するように電動モータ23にパッド後退制御電流を供給する。非制動時に面振れによってディスクロータ8がブレーキパッド10A、10Bに接触したとき、ピストン16が容易に後退するので、ディスクロータ8の偏摩耗を抑制することができる。
【解決手段】電動モータ23の回転を差動減速機構18によって減速し、ボールランプ機構17によってピストン16の直線運動に変換し、ピストン16によってブレーキパッド10A、10Bをディスクロータ8に押圧して制動力を発生させる。非制動時には、電動モータ23を逆回転させてピストン16を後退させ、一定のパッドクリアランスを保持する。非制動時に、ピストン16の位置を維持しつつピストン16を後退させる方向に付勢するように電動モータ23にパッド後退制御電流を供給する。非制動時に面振れによってディスクロータ8がブレーキパッド10A、10Bに接触したとき、ピストン16が容易に後退するので、ディスクロータ8の偏摩耗を抑制することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電動モータによってブレーキパッドをディスクロータに押圧して制動力を発生させる電動ディスクブレーキに関するものである。
【背景技術】
【0002】
電動ディスクブレーキとしては、例えば特許文献1に記載されているように、電動モータのロータの回転運動をボールねじ機構、ボールランプ機構等の回転−直動変換機構を用いてピストンの直線運動に変換し、ピストンによってブレーキパッドをディスクロータに押圧させることにより、制動力を発生させるものが知られている。電動ディスクブレーキは、運転者によるブレーキペダルの踏力(又は変位量)をセンサによって検出し、制御装置によって、この検出値に基づいて電動モータの回転を制御することより、所望の制動力を発生させることができる。
【0003】
【特許文献1】特開2003−202042号公報
【0004】
この種の電動ディスクブレーキでは、適宜、ピストンの推力又は電動モータの回転位置に基づいて制動力を制御することによって制御精度を高めることができる。また、非制動状態においては、電動モータの回転位置に基づいて、ディスクロータとブレーキパッドとの間に一定のパッドクリアランスを維持するようにしている。
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、上記従来の電動モータの回転位置に基づいてパッドクリアランスを一定に維持するようにした電動ディスクブレーキでは、次のような問題がある。例えば、制動終了直後に制動による熱変形等によってディスクロータに面振れが生じると、ディスクロータが非制動位置にあるブレーキパッドに不規則に接触することがある。これは、制動動作を速やかに行うため、パッドクリアランスを小さく設定していることに起因している。このとき、ディスクロータがブレーキパッドに接触してピストンを後退させようとしても、上記電動ディスクブレーキにおいては、位置制御が実行され、電動モータを回転させてブレーキパッドを元の非制動位置に保持しようとする。このため、ブレーキパッドがディスクロータに押付けられることになり、ディスクロータが回転方向に波打ったように偏摩耗し易くなる。このようにディスクロータが偏摩耗するとブレーキジャダーが発生しやすくなってしまう。
【0006】
本発明は、上記の点に鑑みてなされたものであり、ディスクロータの偏摩耗を防止するようにした電動ディスクブレーキを提供することを目的とする。
【課題を解決するための手段】
【0007】
上記の課題を解決するために、請求項1に係る発明は、電動モータと、該電動モータの回転運動を直線運動に変換する回転−直動変換機構と、該回転−直動変換機構の直線運動によってブレーキパッドをディスクロータに押圧するパッド押圧部材と、制動時に前記パッド押圧部材に目標推力を発生させるように前記電動モータに電流を供給する制御手段とを有し、非制動時に前記パッド押圧部材がブレーキパッドとディスクロータとのクリアランスを一定に保持する電動ディスクブレーキにおいて、前記制御手段は、非制動時に前記ディスクロータが前記ブレーキパッドに接触したとき、前記パッド押圧部材の後退を許すことを特徴とする。
請求項2に係る発明は、電動モータと、該電動モータの回転運動を直線運動に変換する回転−直動変換機構と、該回転−直動変換機構の直線運動によってブレーキパッドをディスクロータに押圧するパッド押圧部材と、制動時に前記パッド押圧部材に目標推力を発生させるように前記電動モータに電流を供給する制御手段とを有し、前記パッド押圧部材は、所定位置まで戻った後、前記制御手段が前記電動モータへの電流の供給を遮断してもその位置に保持される電動ディスクブレーキにおいて、前記制御手段は、非制動時に、前記パッド押圧部材の位置を維持しつつ該パッド押圧部材を後退させる方向に付勢するように前記電動モータに所定のパッド後退制御電流を供給して、前記ディスクロータが前記ブレーキパッドに接触したとき、前記ブレーキパッドの後退を促進することを特徴とする。
請求項3の発明に係る電動ディスクブレーキは、上記請求項2の構成において、前記パッド後退制御電流は、非制動時に前記ディスクロータの接触によって前記ブレーキパッドが後退したとき、その後退位置が維持される大きさの電流であることを特徴とする。
請求項4の発明に係る電動ディスクブレーキは、上記請求項2の構成において、前記制御手段は、非制動時に前記ディスクロータが前記ブレーキパッドに接触して前記パッド押圧部材が後退したとき、該パッド押圧部材をその位置から更に所定量だけ後退させることを特徴とする。
請求項5に係る発明は、電動モータと、該電動モータの回転運動を直線運動に変換する回転−直動変換機構と、該回転−直動変換機構の直線運動によってブレーキパッドをディスクロータに押圧するパッド押圧部材と、前記電動モータの回転位置を検出する位置検出手段と、前記パッド押圧部材に目標推力を発生させるように前記電動モータに電流を供給し、非制動時に前記パッド押圧部材を所定位置まで戻してその位置で保持する制御手段とを有する電動ディスクブレーキにおいて、前記制御手段は、非制動時に前記パッド押圧部材を所定位置に保持し得る最低電流であるパッド後退制御電流を前記電動モータに供給することを特徴とする。
請求項6の発明に係る電動ディスクブレーキは、上記請求項5の構成において、前記制御手段は、非制動時に前記位置検出手段の検出に基づいて前記パッド押圧部材を所定位置に戻した後、前記パッド押圧部材を所定位置に保持するために前記パッド後退制御電流を前記電動モータに供給することを特徴とする。
請求項7の発明に係る電動ディスクブレーキは、上記請求項6の構成において、前記制御手段は、非制動時に前記ディスクロータが前記ブレーキパッドに接触して前記パッド押圧部材が後退したとき、該パッド押圧部材をその位置から更に所定量だけ後退させることを特徴とする。
請求項8の発明に係る電動ディスクブレーキは、上記請求項5乃至7のいずれかの構成において、前記パッド押圧部材は、付勢手段により後退方向に常時付勢されていることを特徴とする。
請求項9の発明に係る電動ディスクブレーキは、上記請求項1乃至8のいずれかの構成において、前記制御手段は、車両の旋回時には、前記電動モータへのパッド後退制御電流の供給を停止することを特徴とする。
請求項10の発明に係る電動ディスクブレーキは、上記請求項1乃至9のいずれかの構成において、前記制御手段は、車両の悪路走行時には、前記電動モータへのパッド後退制御電流の供給を停止することを特徴とする。
【発明の効果】
【0008】
本発明に係る電動ディスクブレーキによれば、非制動時に面振れ等発生によりディスクロータがブレーキパッドに接触したとき、パッド押圧部材が容易に後退するので、ディスクロータの偏摩耗を抑制することができ、ディスクロータの偏摩耗によるブレーキジャダー等を防止することができる。
【発明を実施するための最良の形態】
【0009】
以下、本発明の一実施形態を図面に基づいて詳細に説明する。
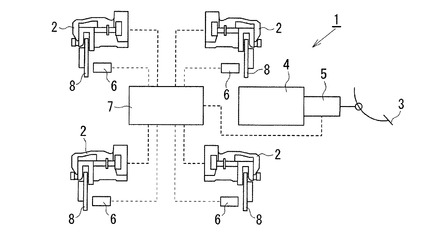
本実施形態に係る電動ディスクブレーキの概略構成を図2に示す。図2に示すように、電動ディスクブレーキ1は、自動車の各車輪に設けられた電動ディスクブレーキ本体2と、ブレーキペダル3に連結されたストロークシミュレータ4と、運転者によるブレーキペダル3の操作ストロークを検出するストロークセンサ5と、ストロークセンサ5及び車速センサ6等の各種センサの検出に基づいて電動ディスクブレーキ本体2に制御電流を供給するコントローラ7(制御手段)とを備えている。
【0010】
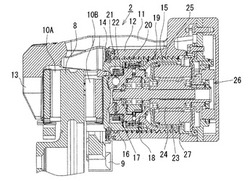
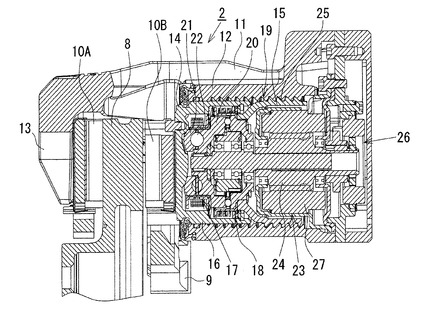
図1に示すように、電動ディスクブレーキ本体2は、キャリパ浮動型ディスクブレーキであって、車輪と共に回転するディスクロータ8と、サスペンション部材等の車体側の非回転部分(図示せず)に固定されるキャリア9と、ディスクロータ8の両側に配置されてキャリア9によって支持される一対のブレーキパッド10A、10Bと、ディスクロータ8を跨ぐように配置されてキャリア9に対してディスクロータ8の軸方向に沿って移動可能に支持されたキャリパ本体11とを備えている。
【0011】
キャリパ本体11には、ディスクロータ2の一側に対向して開口する貫通穴を有する円筒状のシリンダ部12及びシリンダ部12からディスクロータ2を跨いで反対側へ延びる爪部13が一体的に形成されている。キャリパ本体11のシリンダ部12内には、ピストンユニット14及びモータユニット15が設けられている。
【0012】
ピストンユニット14は、シリンダ部12に摺動可能に嵌装される有底円筒状のピストン16(パッド押圧部材)と、ピストン16の内部に収容されたボールランプ機構17(回転−直動変換機構)及び差動減速機構18と、パッド摩耗補償機構19とを一体化したものである。ボールランプ機構17は、回転ディスク20と直動ディスク21との間の傾斜溝にボール22(鋼球)が介装されており、回転ディスク20と直動ディスク21とを相対回転させることにより、傾斜溝間でボール22が転動して、回転ディスク20と直動ディスク21とを回転角度に応じて軸方向に相対移動させる。これにより、回転運動を直線運動に変換する。なお、本実施形態においては、回転−直動変換機構をボールランプ機構17としているが、ボールネジ機構やローラランプ機構、精密ローラネジ機構等としてもよい。
【0013】
差動減速機構18は、ボールランプ機構17と、モータユニット15の電動モータ23との間に介装され、電動モータ23のロータ24の回転を所定の減速比で減速してボールランプ機構17の回転ディスク20に伝達する。パッド摩耗補償機構19は、ブレーキパッド10A、10Bの摩耗(ディスクロータ8との接触位置の変化)に対して、調整スクリュ25を前進させて、ボールランプ機構17を追従させるものである。
【0014】
モータユニット15には、電動モータ23及びレゾルバ26(位置検出手段)が組込まれている。電動モータ23のステータ27のコイルへの通電によって、ロータ24を回転させ、差動減速機構18を介してボールランプ機構17を駆動し、このとき、レゾルバ26によってロータ24の回転位置を検出する。
【0015】
次に電動ディスクブレーキ本体2の作動について説明する。
ストロークセンサ5によって検出した運転者によるブレーキペダル3の操作に基づいて、コントローラ7によって電動モータ23に制御電流を供給してロータ24を回転させる。ロータ24の回転は、差動減速機構18によって所定の減速比で減速され、ボールランプ機構17によって直線運動に変換されてピストン16を前進させる。ピストン16の前進によって、一方のブレーキパッド10Bがディスクロータ8に押圧され、その反力によってキャリパ本体11が移動して、爪部13が他方のブレーキパッド10Aをディスクロータ2に押圧して制動力を発生させる。ブレーキパッド10A、10Bの摩耗に対しては、パッド摩耗補償機構19の調整スクリュ25が前進してボールランプ機構17を摩耗に追従させることによって補償する。
【0016】
また、コントローラ7によって、車速センサ6等の各種センサを用いて、各車輪の回転速度、車両速度、車両加速度、操舵角および車両横加速度等の車両状態を検出し、これらの検出に基づいて電動モータ23の回転を制御することにより、倍力制御、アンチロック制御、トラクション制御および車両安定化制御等を実行することができる。
【0017】
コントローラ7による電動ディスクブレーキ本体2の制御について図7を参照して説明する。
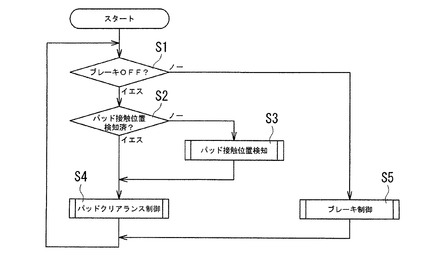
図7を参照して、ステップS1でブレーキペダル3が操作されている否かを判断し、ブレーキペダル3が操作されていれば(ノー)、ステップS5で通常のブレーキ制御(後述)を実行する。ブレーキペダル3が操作されていなければ(イエス)、ステップS2でブレーキパッド10A、10Bがディスクロータ8に接触する位置(パッド接触位置)が既に検知されているか否かを判断する。パッド接触位置が検知済みであれば(イエス)、そのままステップS4に進み、未検知であれば(ノー)、ステップS3でパッド接触位置を検知してステップS4に進む。ステップS4では、パッドクリアランス制御を実行する。
【0018】
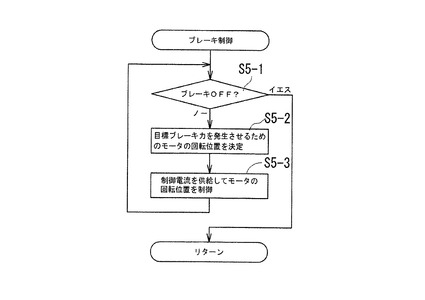
図7のステップS5における通常のブレーキ制御について、図8を参照して説明する。
図8を参照して、ステップS5−1でブレーキペダル3が操作されている否かを判断し、ブレーキペダル3の操作が解除されるまで、ステップS5−2及びS5−3を実行する。ステップS5−2で、ブレーキペダル3のストロークに応じたブレーキ力(ピストン16の推力)が発生するように電動モータ23の目標回転位置を設定し、ステップS5−3で電動モータ23の回転位置が目標回転位置となるように制御電流を供給して回転位置制御を実行する。
【0019】
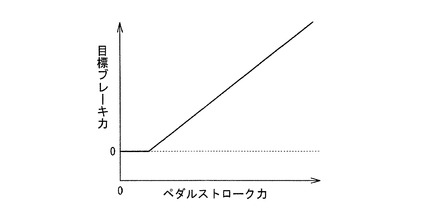
このとき、ブレーキペダル3のストロークと目標ブレーキ力との関係は、例えば図6に示すように予め設定した目標ブレーキ力−ペダルストローク特性によって決定する。また、目標ブレーキ力(ピストン16の目標推力)を発生させるための電動モータ23の回転位置及び制御電流の関係は、電動ディスクブレーキ本体2の機械的特性に応じて予め設定する。電動ディスクブレーキ本体2の機械的特性は、ボールランプ機構、差動減速機構等の各構成要素の仕様、各部の摩擦、剛性等によって決定される
【0020】
電動ディスクブレーキ本体2の機械的特性について、図3乃至図5を参照して説明する。
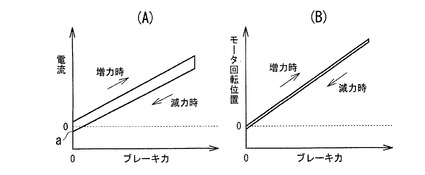
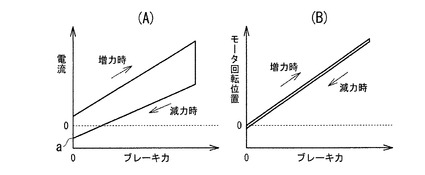
図3に示す機械的特性は、ボールランプ機構、差動減速機構等の各構成要素の機械効率が良い場合のもので、図3(B)に示すように、電動モータ23の回転位置とブレーキ力との関係は、ブレーキ力の増力時と減力時とでほぼ一致するが、図3(A)に示すように、電動モータ23に供給する電流とブレーキ力との関係は、同じブレーキ力に対して、減力時の電流は、増力時の電流よりもやや小さく、僅かなヒステリシスを有している。この場合、ヒステリシスが小さいので、減力時に電流値を0にすれば、ブレーキ力もほぼ0になる。
【0021】
図4に示す機械的特性は、ボールランプ機構、差動減速機構等の各構成要素の機械効率があまり良くない場合のもので、図4(B)に示すように、電動モータ23の回転位置とブレーキ力との関係は、ブレーキ力の増力時と減力時とでほぼ一致するが、図4(A)に示すように、電動モータ23に供給する電流とブレーキ力との関係は、同じブレーキ力に対して、減力時の電流は、増力時の電流よりも小さく、ヒステリシスを有しており、減力時に電流値を0にしても、ブレーキ力は0にならない。この場合、減力時にブレーキ力を0にするためには、電動モータ23を逆回転させるための電流を供給する必要がある。
【0022】
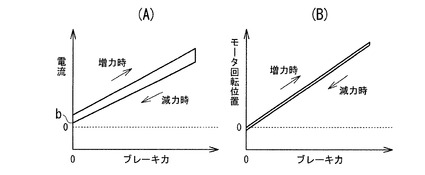
図5は、図3に示す機械的特性を有する電動ディスクブレーキ本体2に、戻しばねを設けてピストン16を後退方向に常時付勢するようにしたものの機械的特性を示している。この機械的特性では、図3に示すものと同様、図5(B)に示すように、電動モータ23の回転位置とブレーキ力との関係は、ブレーキ力の増力時と減力時とでほぼ一致し、図5(A)に示すように、電動モータ23に供給する電流とブレーキ力との関係は、同じブレーキ力に対して、減力時の電流は、増力時の電流よりもやや小さく、僅かなヒステリシスを有している。そして、ブレーキパッド10A、10Bに後退方向に戻しバネのバネ力が常時作用しているため、電動モータ23を増力方向に回転させるためには、このばね力に抗して回転する必要があり、減力時の電流も、図3に示すものよりも電流が大きくなっている。このため、電流を0にすれば、ブレーキ力は確実に0になるが、ブレーキパッド10A、10Bとディスクロータ8とのクリアランスを一定量とするためには0よりも大きな電流をかけておく必要がある。
【0023】
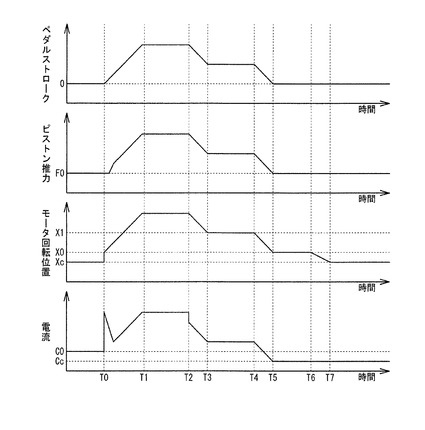
次に、上述の通常のブレーキ制御によるブレーキ動作の一例について図11のタイミングチャートを参照して説明する。
図11を参照して、時間T0でブレーキペダル3が踏込まれると、ブレーキ動作開始時に制御電流を増大させてブレーキ力を迅速に立ち上げた後、ペダルストロークに応じたブレーキ力となるように電動モータ23の回転位置を制御する。時間T1でペダルストロークが一定になると、電動モータ23の回転位置を一定に維持する。このとき、ブレーキ力は増力方向であったから、時間T1の制御電流を維持することによってブレーキ力を一定に維持することができる。
【0024】
時間T2でブレーキペダル3が戻されると、ペダルストローク3に応じたブレーキ力となるように電動モータ23の回転位置を制御する。このとき、ブレーキ力が減力方向となるので、図3乃至図5で説明した電動ディスクブレーキ本体2の機械的なヒステリシスの分だけ制御電流を減少させる。時間T3でペダルストロークが一定になると、電動モータ23の回転位置を一定に維持する。このとき、ブレーキ力は減力方向であるから、電動ディスクブレーキ本体2の機械的なヒステリシスの分だけ制御電流を増大させてブレーキ力を一定に維持する。時間T4でブレーキペダルが戻されると、ペダルストローク3に応じたブレーキ力となるように電動モータ23の回転位置を制御する。
【0025】
時間T5でペダルストロークが0となったとき、ブレーキパッド10A、10Bがディスクロータ8に接触するパッド接触位置に電動モータ23の回転位置を調整する。時間T6でペダルストローク0が一定時間継続すると、パッドクリアランス制御を実行してブレーキパッド10A、10Bのディスクロータ8とのクリアランスが一定量になるように電動モータ23の回転位置を制御する。時間T7でパッドクリアランスが一定量になると、電動モータ23を停止し、その回転位置制御を継続する。
【0026】
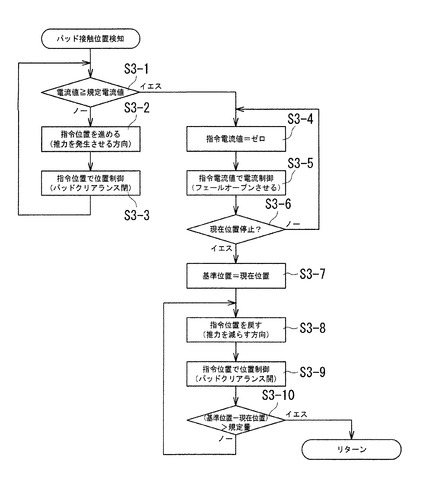
次に、図7のステップS3におけるパッド接触位置検知について、図9及び図12を参照して説明する。
図9を参照して、ステップS3−1で電動モータ23への制御電流を監視し、制御電流が規定電流に達するまで、ステップS3−2及びS3−3を実行してブレーキパッド10A、10Bを前進させる。電動モータ23への制御電流が規定電流に達したら、ステップS3−4で制御電流を0に設定し、ステップS3−5で電動モータ23への通電を停止し、ステップS3−6で電動モータ23の回転位置(停止位置)を監視する。電動モータ23の回転が停止したら、ステップS3−7で、その位置を基準位置とする。そして、ステップS3−10で電動モータ23の回転位置を監視しながらステップS3−8及びS3−9を実行してブレーキパッド10A、10Bを一定量だけ後退させ、その位置をパッド接触位置とする。
【0027】
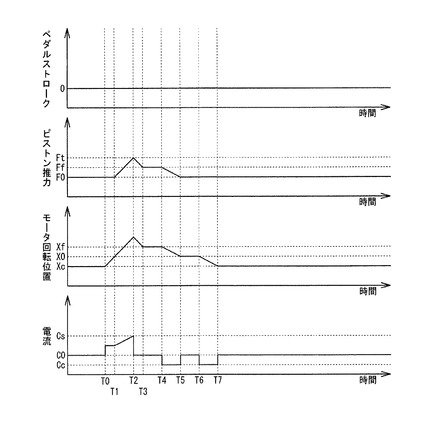
上述のパッド接触位置検知を実行したときの電動ディスクブレーキの動作について図12のタイミングチャートを参照して説明する。
時間T0でパッド接触位置検知動作を開始し、電動モータ23に制御電流を供給してブレーキパッド10A、10Bを前進させる。時間T2でブレーキパッド10A、10Bがディスクロータ8に接触すると、電動モータ23の負荷(ピストン推力)が増大して制御電流が増大する(なお、この制御電流の増大の開始を直接検知することは困難である)。時間T2で制御電流が規定電流CSに達したら、制御電流を停止する。制御電流の停止によってブレーキパッド10A、10Bが後退し、時間T3で解放位置(フェールオープン)に達する(なお、これを直接検知することは困難である)。時間T4で電動モータ23の回転の停止を検知しとき、その位置を基準位置Xfとする。そして、パッド後退制御電流Ccによって電動モータ23を一定量だけ逆回転させて通電を停止し、その位置をパッド接触位置とする(時間T5)。その後もブレーキペダルの操作がないので、時間T6で一定量だけブレーキパッド10A、10Bを後退させる方向に電動モータ23を回転させて一定のパッドクリアランスを得る(時間T7)。
【0028】
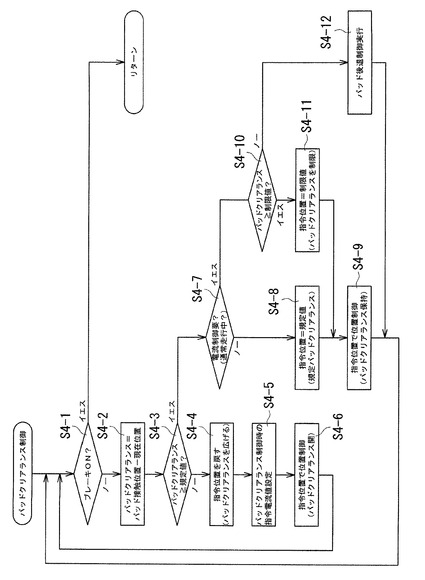
次に、パッドクリアランス制御について図10及び図13を参照して説明する。
図10を参照して、ステップS4−1でブレーキの作動を監視し、ブレーキ作動中であれば、メインルーチンに戻る。ブレーキ作動中でなければ、ステップS4−2で現在のパッドクリアランスを検出し、ステップS4−3で現在のパッドクリアランスが規定値に達しているか否かを判断し、達していない場合には、達するまでステップS4−4、S4−5及びS4−6を実行して、電動モータ23を後退方向に回転させてブレーキパッド10A、10Bを後退させる。これにより、所定のパッドクリアランスを得る。
【0029】
パッドクリアランスが規定値に達したとき、ステップS4−7に進み、ステップS4−7で、パッド後退制御の要否を判断する。このとき、電動ディスクブレーキ本体2に大きな加速度が作用する車両の悪路走行時、旋回時等においては、その加速度によってブレーキパッド10A、10B及びピストン16が移動する虞があるため、パッド後退制御を実行せず(ノー)、ステップS4−8及びS4−9を実行して、ブレーキパッド10A、10Bの位置(パッドクリアランス)が一定(一般的には0.3mm程度)になるように電動モータ23に制御電流を供給してその位置を制御する。
【0030】
通常走行時には(イエス)、ステップS4−10に進み、ステップS4−10でパッドクリアランスを監視し、パッドクリアランスが制限値(一般的には0.4mm程度)に達している場合は(イエス)、ステップS4−11でパッドクリアランスの目標値を制限値に設定し、ステップS4−9を実行してパッドクリアランスを制限値に調整する。これにより、パッドクリアランスが過度に大きくなるのを防止する。
【0031】
パッドクリアランスが制限値に達していない場合には(ノー)、ステップS4−12でパッド後退制御を実行する。パッド後退制御は、所定のパッドクリアランスに調整されたブレーキパッド10A、10Bに対して、電動モータ23にピストン16を後退させる方向に、ピストン16が後退しない(位置が保持される)程度の最低電流であるパッド後退制御電流を供給することによって行われる。この場合の最低電流とは、ブレーキ力が0となるときの下限電流値付近の電流値のことであり、図3(A)に示される機械効率が良い電動ディスクブレーキ場合には、電流値の0付近(図3(A)中、aで示される部分)が最低電流となる。また、図4(A)に示される機械効率があまり良くない電動ディスクブレーキ場合には、電動モータ23を逆回転させるため電流値の下限値電流値付近(図4(A)中、aで示される部分)が最低電流となる。さらに、図5(A)に示される戻しばねを設けてピストン16を後退方向に常時付勢するようにした電動ディスクブレーキ場合には、戻しばねに抗して電動モータ23の回転を保持するとともにピストン16が後退方向に押圧されたときに戻しばねにしたがって電動モータ23の逆回転させるための電流値の下限値電流値付近(図5(A)中、bで示される部分)が最低電流となる。
【0032】
このようにパッド後退制御電流を最低電流とすることで、ディスクロータ8に面振れが生じて、ディスクロータ8がブレーキパッド10A、10Bに接触したとき、ピストン16が容易に後退するようになる。これにより、ブレーキパッド10A、10Bは、通常は、所定のパッドクリアランスを有する位置に保持されているが、制動による熱変形等によって面振れが生じてディスクロータ8がブレーキパッド10A、10Bに接触した場合には、ブレーキパッド10A、10Bを円滑に後退させることができ、ブレーキパッド10A、10Bの偏摩耗を抑制して、偏摩耗によるブレーキジャダーの発生を防止ことができる。
【0033】
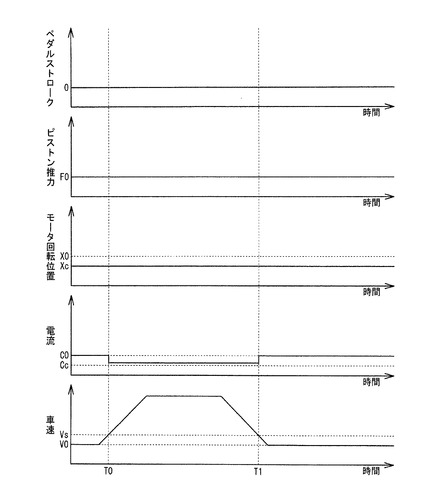
次に、パッド後退制御を実行したときの電動ディスクブレーキ本体2の動作について、図13のタイミングチャートを参照して説明する。なお、図13に示す例では、車速に基づいて、パッド後退制御の要否を決定しており、車速が基準車速Vsに達するまでは、パッド後退制御を実行せず、車速が基準車速Vsに達したときパッド後退制御を実行するようにしている。これは、低速時にはディスクロータ8の面振れが発生しにくくなっているためである。
【0034】
図13を参照して、時間T0で車速が基準車速Vsに達したとき、パッド後退制御の実行を開始し、電動モータ23にパッド後退制御電流Ccを供給してパッドクリアランスを維持したままピストン16を後退方向に付勢する。時間T1で車速が基準車速Vs未満に低下したとき、パッド後退制御を終了してパッド後退制御電流Ccを0にし、通常のパッドクリアランス制御(ブレーキパッド10A、10Bの位置制御)を実行する。
【0035】
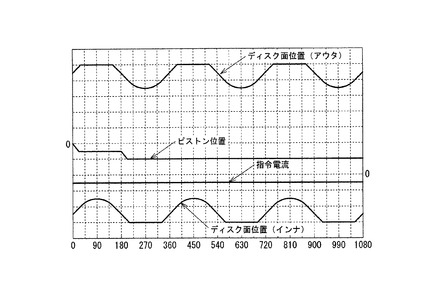
そして、図14に示すように、パッド後退制御が実行されると、回転するディスクロータ8の面振れ等によるディスクロータ8のディスク面位置の変化に対して、ディスクロータ8のブレーキパッド10A、10Bへの接触によってピストンが円滑に後退することによって、ブレーキパッド10A、10Bの偏摩耗を抑制する。
【0036】
上述のパッド後退制御では、ディスクロータ8の接触によって後退したピストン16は、その位置で保持されるが、このときのピストン16の移動を監視し、面振れ等によってディスクロータ8が接触してブレーキパッド10A、10B(ピストン16)が後退したとき、パッド後退制御電流を増大させて、その後退位置から更に一定量だけピストン16を後退させるようにしてもよい。これにより、ブレーキパッド10A、10Bの偏摩耗を効果的に抑制することができる。
【0037】
また、上述の例では、パッド後退制御電流Ccとして一定の電流を供給するようにしているが、パッド後退制御電流を所定のパターンで変動させてもよく、いわゆるディザ電流を重畳するようにしてもよい。
【図面の簡単な説明】
【0038】
【図1】本発明の一実施形態に係る電動ディスクブレーキの縦断面図である。
【図2】本発明の一実施形態に係る電動ディスクブレーキ装置の概略構成を示す図である。
【図3】機械的ヒステリシスが小さい電動ディスクブレーキのヒステリシス特性を示すグラフ図である。
【図4】機械的ヒステリシスが大きい電動ディスクブレーキのヒステリシス特性を示すグラフ図である。
【図5】戻しバネを備えた電動ディスクブレーキのヒステリシス特性を示すグラフ図である。
【図6】図2に示す電動ディスクブレーキ装置のブレーキ力とペダルストロークとの関係を示すグラフ図である。
【図7】図2に示すディスクブレーキ装置のコントローラによる制御を示すフローチャートである。
【図8】図7に示すフローチャートのブレーキ制御のサブルーチンを示すフローチャートである。
【図9】図7に示すフローチャートのパッド接触位置検知のサブルーチンを示すフローチャートである。
【図10】図7に示すフローチャートのパッドクリアランス制御のサブルーチンを示すフローチャートである。
【図11】図8に示すブレーキ制御を実行した場合の電動ディスクブレーキの作動を示すタイムチャートである。
【図12】図9に示すパッド位置検知を実行した場合の電動ディスクブレーキの作動を示すタイムチャートである。
【図13】図10に示すパッド後退制御を実行した場合の電動ディスクブレーキの作動を示すタイムチャートである。
【図14】図10に示すパッド後退制御を実行した場合のディスクロータのディスク面位置とピストンの位置との関係を示すタイムチャートである。
【符号の説明】
【0039】
1 電動ディスクブレーキ、7 コントローラ(制御手段)、8 ディスクロータ、10A、10Bブレーキパッド、16 ピストン(パッド押圧部材)、17 ボールランプ機構(回転−直動変換機構)、23 電動モータ、26 レゾルバ(位置検出手段)
【技術分野】
【0001】
本発明は、電動モータによってブレーキパッドをディスクロータに押圧して制動力を発生させる電動ディスクブレーキに関するものである。
【背景技術】
【0002】
電動ディスクブレーキとしては、例えば特許文献1に記載されているように、電動モータのロータの回転運動をボールねじ機構、ボールランプ機構等の回転−直動変換機構を用いてピストンの直線運動に変換し、ピストンによってブレーキパッドをディスクロータに押圧させることにより、制動力を発生させるものが知られている。電動ディスクブレーキは、運転者によるブレーキペダルの踏力(又は変位量)をセンサによって検出し、制御装置によって、この検出値に基づいて電動モータの回転を制御することより、所望の制動力を発生させることができる。
【0003】
【特許文献1】特開2003−202042号公報
【0004】
この種の電動ディスクブレーキでは、適宜、ピストンの推力又は電動モータの回転位置に基づいて制動力を制御することによって制御精度を高めることができる。また、非制動状態においては、電動モータの回転位置に基づいて、ディスクロータとブレーキパッドとの間に一定のパッドクリアランスを維持するようにしている。
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、上記従来の電動モータの回転位置に基づいてパッドクリアランスを一定に維持するようにした電動ディスクブレーキでは、次のような問題がある。例えば、制動終了直後に制動による熱変形等によってディスクロータに面振れが生じると、ディスクロータが非制動位置にあるブレーキパッドに不規則に接触することがある。これは、制動動作を速やかに行うため、パッドクリアランスを小さく設定していることに起因している。このとき、ディスクロータがブレーキパッドに接触してピストンを後退させようとしても、上記電動ディスクブレーキにおいては、位置制御が実行され、電動モータを回転させてブレーキパッドを元の非制動位置に保持しようとする。このため、ブレーキパッドがディスクロータに押付けられることになり、ディスクロータが回転方向に波打ったように偏摩耗し易くなる。このようにディスクロータが偏摩耗するとブレーキジャダーが発生しやすくなってしまう。
【0006】
本発明は、上記の点に鑑みてなされたものであり、ディスクロータの偏摩耗を防止するようにした電動ディスクブレーキを提供することを目的とする。
【課題を解決するための手段】
【0007】
上記の課題を解決するために、請求項1に係る発明は、電動モータと、該電動モータの回転運動を直線運動に変換する回転−直動変換機構と、該回転−直動変換機構の直線運動によってブレーキパッドをディスクロータに押圧するパッド押圧部材と、制動時に前記パッド押圧部材に目標推力を発生させるように前記電動モータに電流を供給する制御手段とを有し、非制動時に前記パッド押圧部材がブレーキパッドとディスクロータとのクリアランスを一定に保持する電動ディスクブレーキにおいて、前記制御手段は、非制動時に前記ディスクロータが前記ブレーキパッドに接触したとき、前記パッド押圧部材の後退を許すことを特徴とする。
請求項2に係る発明は、電動モータと、該電動モータの回転運動を直線運動に変換する回転−直動変換機構と、該回転−直動変換機構の直線運動によってブレーキパッドをディスクロータに押圧するパッド押圧部材と、制動時に前記パッド押圧部材に目標推力を発生させるように前記電動モータに電流を供給する制御手段とを有し、前記パッド押圧部材は、所定位置まで戻った後、前記制御手段が前記電動モータへの電流の供給を遮断してもその位置に保持される電動ディスクブレーキにおいて、前記制御手段は、非制動時に、前記パッド押圧部材の位置を維持しつつ該パッド押圧部材を後退させる方向に付勢するように前記電動モータに所定のパッド後退制御電流を供給して、前記ディスクロータが前記ブレーキパッドに接触したとき、前記ブレーキパッドの後退を促進することを特徴とする。
請求項3の発明に係る電動ディスクブレーキは、上記請求項2の構成において、前記パッド後退制御電流は、非制動時に前記ディスクロータの接触によって前記ブレーキパッドが後退したとき、その後退位置が維持される大きさの電流であることを特徴とする。
請求項4の発明に係る電動ディスクブレーキは、上記請求項2の構成において、前記制御手段は、非制動時に前記ディスクロータが前記ブレーキパッドに接触して前記パッド押圧部材が後退したとき、該パッド押圧部材をその位置から更に所定量だけ後退させることを特徴とする。
請求項5に係る発明は、電動モータと、該電動モータの回転運動を直線運動に変換する回転−直動変換機構と、該回転−直動変換機構の直線運動によってブレーキパッドをディスクロータに押圧するパッド押圧部材と、前記電動モータの回転位置を検出する位置検出手段と、前記パッド押圧部材に目標推力を発生させるように前記電動モータに電流を供給し、非制動時に前記パッド押圧部材を所定位置まで戻してその位置で保持する制御手段とを有する電動ディスクブレーキにおいて、前記制御手段は、非制動時に前記パッド押圧部材を所定位置に保持し得る最低電流であるパッド後退制御電流を前記電動モータに供給することを特徴とする。
請求項6の発明に係る電動ディスクブレーキは、上記請求項5の構成において、前記制御手段は、非制動時に前記位置検出手段の検出に基づいて前記パッド押圧部材を所定位置に戻した後、前記パッド押圧部材を所定位置に保持するために前記パッド後退制御電流を前記電動モータに供給することを特徴とする。
請求項7の発明に係る電動ディスクブレーキは、上記請求項6の構成において、前記制御手段は、非制動時に前記ディスクロータが前記ブレーキパッドに接触して前記パッド押圧部材が後退したとき、該パッド押圧部材をその位置から更に所定量だけ後退させることを特徴とする。
請求項8の発明に係る電動ディスクブレーキは、上記請求項5乃至7のいずれかの構成において、前記パッド押圧部材は、付勢手段により後退方向に常時付勢されていることを特徴とする。
請求項9の発明に係る電動ディスクブレーキは、上記請求項1乃至8のいずれかの構成において、前記制御手段は、車両の旋回時には、前記電動モータへのパッド後退制御電流の供給を停止することを特徴とする。
請求項10の発明に係る電動ディスクブレーキは、上記請求項1乃至9のいずれかの構成において、前記制御手段は、車両の悪路走行時には、前記電動モータへのパッド後退制御電流の供給を停止することを特徴とする。
【発明の効果】
【0008】
本発明に係る電動ディスクブレーキによれば、非制動時に面振れ等発生によりディスクロータがブレーキパッドに接触したとき、パッド押圧部材が容易に後退するので、ディスクロータの偏摩耗を抑制することができ、ディスクロータの偏摩耗によるブレーキジャダー等を防止することができる。
【発明を実施するための最良の形態】
【0009】
以下、本発明の一実施形態を図面に基づいて詳細に説明する。
本実施形態に係る電動ディスクブレーキの概略構成を図2に示す。図2に示すように、電動ディスクブレーキ1は、自動車の各車輪に設けられた電動ディスクブレーキ本体2と、ブレーキペダル3に連結されたストロークシミュレータ4と、運転者によるブレーキペダル3の操作ストロークを検出するストロークセンサ5と、ストロークセンサ5及び車速センサ6等の各種センサの検出に基づいて電動ディスクブレーキ本体2に制御電流を供給するコントローラ7(制御手段)とを備えている。
【0010】
図1に示すように、電動ディスクブレーキ本体2は、キャリパ浮動型ディスクブレーキであって、車輪と共に回転するディスクロータ8と、サスペンション部材等の車体側の非回転部分(図示せず)に固定されるキャリア9と、ディスクロータ8の両側に配置されてキャリア9によって支持される一対のブレーキパッド10A、10Bと、ディスクロータ8を跨ぐように配置されてキャリア9に対してディスクロータ8の軸方向に沿って移動可能に支持されたキャリパ本体11とを備えている。
【0011】
キャリパ本体11には、ディスクロータ2の一側に対向して開口する貫通穴を有する円筒状のシリンダ部12及びシリンダ部12からディスクロータ2を跨いで反対側へ延びる爪部13が一体的に形成されている。キャリパ本体11のシリンダ部12内には、ピストンユニット14及びモータユニット15が設けられている。
【0012】
ピストンユニット14は、シリンダ部12に摺動可能に嵌装される有底円筒状のピストン16(パッド押圧部材)と、ピストン16の内部に収容されたボールランプ機構17(回転−直動変換機構)及び差動減速機構18と、パッド摩耗補償機構19とを一体化したものである。ボールランプ機構17は、回転ディスク20と直動ディスク21との間の傾斜溝にボール22(鋼球)が介装されており、回転ディスク20と直動ディスク21とを相対回転させることにより、傾斜溝間でボール22が転動して、回転ディスク20と直動ディスク21とを回転角度に応じて軸方向に相対移動させる。これにより、回転運動を直線運動に変換する。なお、本実施形態においては、回転−直動変換機構をボールランプ機構17としているが、ボールネジ機構やローラランプ機構、精密ローラネジ機構等としてもよい。
【0013】
差動減速機構18は、ボールランプ機構17と、モータユニット15の電動モータ23との間に介装され、電動モータ23のロータ24の回転を所定の減速比で減速してボールランプ機構17の回転ディスク20に伝達する。パッド摩耗補償機構19は、ブレーキパッド10A、10Bの摩耗(ディスクロータ8との接触位置の変化)に対して、調整スクリュ25を前進させて、ボールランプ機構17を追従させるものである。
【0014】
モータユニット15には、電動モータ23及びレゾルバ26(位置検出手段)が組込まれている。電動モータ23のステータ27のコイルへの通電によって、ロータ24を回転させ、差動減速機構18を介してボールランプ機構17を駆動し、このとき、レゾルバ26によってロータ24の回転位置を検出する。
【0015】
次に電動ディスクブレーキ本体2の作動について説明する。
ストロークセンサ5によって検出した運転者によるブレーキペダル3の操作に基づいて、コントローラ7によって電動モータ23に制御電流を供給してロータ24を回転させる。ロータ24の回転は、差動減速機構18によって所定の減速比で減速され、ボールランプ機構17によって直線運動に変換されてピストン16を前進させる。ピストン16の前進によって、一方のブレーキパッド10Bがディスクロータ8に押圧され、その反力によってキャリパ本体11が移動して、爪部13が他方のブレーキパッド10Aをディスクロータ2に押圧して制動力を発生させる。ブレーキパッド10A、10Bの摩耗に対しては、パッド摩耗補償機構19の調整スクリュ25が前進してボールランプ機構17を摩耗に追従させることによって補償する。
【0016】
また、コントローラ7によって、車速センサ6等の各種センサを用いて、各車輪の回転速度、車両速度、車両加速度、操舵角および車両横加速度等の車両状態を検出し、これらの検出に基づいて電動モータ23の回転を制御することにより、倍力制御、アンチロック制御、トラクション制御および車両安定化制御等を実行することができる。
【0017】
コントローラ7による電動ディスクブレーキ本体2の制御について図7を参照して説明する。
図7を参照して、ステップS1でブレーキペダル3が操作されている否かを判断し、ブレーキペダル3が操作されていれば(ノー)、ステップS5で通常のブレーキ制御(後述)を実行する。ブレーキペダル3が操作されていなければ(イエス)、ステップS2でブレーキパッド10A、10Bがディスクロータ8に接触する位置(パッド接触位置)が既に検知されているか否かを判断する。パッド接触位置が検知済みであれば(イエス)、そのままステップS4に進み、未検知であれば(ノー)、ステップS3でパッド接触位置を検知してステップS4に進む。ステップS4では、パッドクリアランス制御を実行する。
【0018】
図7のステップS5における通常のブレーキ制御について、図8を参照して説明する。
図8を参照して、ステップS5−1でブレーキペダル3が操作されている否かを判断し、ブレーキペダル3の操作が解除されるまで、ステップS5−2及びS5−3を実行する。ステップS5−2で、ブレーキペダル3のストロークに応じたブレーキ力(ピストン16の推力)が発生するように電動モータ23の目標回転位置を設定し、ステップS5−3で電動モータ23の回転位置が目標回転位置となるように制御電流を供給して回転位置制御を実行する。
【0019】
このとき、ブレーキペダル3のストロークと目標ブレーキ力との関係は、例えば図6に示すように予め設定した目標ブレーキ力−ペダルストローク特性によって決定する。また、目標ブレーキ力(ピストン16の目標推力)を発生させるための電動モータ23の回転位置及び制御電流の関係は、電動ディスクブレーキ本体2の機械的特性に応じて予め設定する。電動ディスクブレーキ本体2の機械的特性は、ボールランプ機構、差動減速機構等の各構成要素の仕様、各部の摩擦、剛性等によって決定される
【0020】
電動ディスクブレーキ本体2の機械的特性について、図3乃至図5を参照して説明する。
図3に示す機械的特性は、ボールランプ機構、差動減速機構等の各構成要素の機械効率が良い場合のもので、図3(B)に示すように、電動モータ23の回転位置とブレーキ力との関係は、ブレーキ力の増力時と減力時とでほぼ一致するが、図3(A)に示すように、電動モータ23に供給する電流とブレーキ力との関係は、同じブレーキ力に対して、減力時の電流は、増力時の電流よりもやや小さく、僅かなヒステリシスを有している。この場合、ヒステリシスが小さいので、減力時に電流値を0にすれば、ブレーキ力もほぼ0になる。
【0021】
図4に示す機械的特性は、ボールランプ機構、差動減速機構等の各構成要素の機械効率があまり良くない場合のもので、図4(B)に示すように、電動モータ23の回転位置とブレーキ力との関係は、ブレーキ力の増力時と減力時とでほぼ一致するが、図4(A)に示すように、電動モータ23に供給する電流とブレーキ力との関係は、同じブレーキ力に対して、減力時の電流は、増力時の電流よりも小さく、ヒステリシスを有しており、減力時に電流値を0にしても、ブレーキ力は0にならない。この場合、減力時にブレーキ力を0にするためには、電動モータ23を逆回転させるための電流を供給する必要がある。
【0022】
図5は、図3に示す機械的特性を有する電動ディスクブレーキ本体2に、戻しばねを設けてピストン16を後退方向に常時付勢するようにしたものの機械的特性を示している。この機械的特性では、図3に示すものと同様、図5(B)に示すように、電動モータ23の回転位置とブレーキ力との関係は、ブレーキ力の増力時と減力時とでほぼ一致し、図5(A)に示すように、電動モータ23に供給する電流とブレーキ力との関係は、同じブレーキ力に対して、減力時の電流は、増力時の電流よりもやや小さく、僅かなヒステリシスを有している。そして、ブレーキパッド10A、10Bに後退方向に戻しバネのバネ力が常時作用しているため、電動モータ23を増力方向に回転させるためには、このばね力に抗して回転する必要があり、減力時の電流も、図3に示すものよりも電流が大きくなっている。このため、電流を0にすれば、ブレーキ力は確実に0になるが、ブレーキパッド10A、10Bとディスクロータ8とのクリアランスを一定量とするためには0よりも大きな電流をかけておく必要がある。
【0023】
次に、上述の通常のブレーキ制御によるブレーキ動作の一例について図11のタイミングチャートを参照して説明する。
図11を参照して、時間T0でブレーキペダル3が踏込まれると、ブレーキ動作開始時に制御電流を増大させてブレーキ力を迅速に立ち上げた後、ペダルストロークに応じたブレーキ力となるように電動モータ23の回転位置を制御する。時間T1でペダルストロークが一定になると、電動モータ23の回転位置を一定に維持する。このとき、ブレーキ力は増力方向であったから、時間T1の制御電流を維持することによってブレーキ力を一定に維持することができる。
【0024】
時間T2でブレーキペダル3が戻されると、ペダルストローク3に応じたブレーキ力となるように電動モータ23の回転位置を制御する。このとき、ブレーキ力が減力方向となるので、図3乃至図5で説明した電動ディスクブレーキ本体2の機械的なヒステリシスの分だけ制御電流を減少させる。時間T3でペダルストロークが一定になると、電動モータ23の回転位置を一定に維持する。このとき、ブレーキ力は減力方向であるから、電動ディスクブレーキ本体2の機械的なヒステリシスの分だけ制御電流を増大させてブレーキ力を一定に維持する。時間T4でブレーキペダルが戻されると、ペダルストローク3に応じたブレーキ力となるように電動モータ23の回転位置を制御する。
【0025】
時間T5でペダルストロークが0となったとき、ブレーキパッド10A、10Bがディスクロータ8に接触するパッド接触位置に電動モータ23の回転位置を調整する。時間T6でペダルストローク0が一定時間継続すると、パッドクリアランス制御を実行してブレーキパッド10A、10Bのディスクロータ8とのクリアランスが一定量になるように電動モータ23の回転位置を制御する。時間T7でパッドクリアランスが一定量になると、電動モータ23を停止し、その回転位置制御を継続する。
【0026】
次に、図7のステップS3におけるパッド接触位置検知について、図9及び図12を参照して説明する。
図9を参照して、ステップS3−1で電動モータ23への制御電流を監視し、制御電流が規定電流に達するまで、ステップS3−2及びS3−3を実行してブレーキパッド10A、10Bを前進させる。電動モータ23への制御電流が規定電流に達したら、ステップS3−4で制御電流を0に設定し、ステップS3−5で電動モータ23への通電を停止し、ステップS3−6で電動モータ23の回転位置(停止位置)を監視する。電動モータ23の回転が停止したら、ステップS3−7で、その位置を基準位置とする。そして、ステップS3−10で電動モータ23の回転位置を監視しながらステップS3−8及びS3−9を実行してブレーキパッド10A、10Bを一定量だけ後退させ、その位置をパッド接触位置とする。
【0027】
上述のパッド接触位置検知を実行したときの電動ディスクブレーキの動作について図12のタイミングチャートを参照して説明する。
時間T0でパッド接触位置検知動作を開始し、電動モータ23に制御電流を供給してブレーキパッド10A、10Bを前進させる。時間T2でブレーキパッド10A、10Bがディスクロータ8に接触すると、電動モータ23の負荷(ピストン推力)が増大して制御電流が増大する(なお、この制御電流の増大の開始を直接検知することは困難である)。時間T2で制御電流が規定電流CSに達したら、制御電流を停止する。制御電流の停止によってブレーキパッド10A、10Bが後退し、時間T3で解放位置(フェールオープン)に達する(なお、これを直接検知することは困難である)。時間T4で電動モータ23の回転の停止を検知しとき、その位置を基準位置Xfとする。そして、パッド後退制御電流Ccによって電動モータ23を一定量だけ逆回転させて通電を停止し、その位置をパッド接触位置とする(時間T5)。その後もブレーキペダルの操作がないので、時間T6で一定量だけブレーキパッド10A、10Bを後退させる方向に電動モータ23を回転させて一定のパッドクリアランスを得る(時間T7)。
【0028】
次に、パッドクリアランス制御について図10及び図13を参照して説明する。
図10を参照して、ステップS4−1でブレーキの作動を監視し、ブレーキ作動中であれば、メインルーチンに戻る。ブレーキ作動中でなければ、ステップS4−2で現在のパッドクリアランスを検出し、ステップS4−3で現在のパッドクリアランスが規定値に達しているか否かを判断し、達していない場合には、達するまでステップS4−4、S4−5及びS4−6を実行して、電動モータ23を後退方向に回転させてブレーキパッド10A、10Bを後退させる。これにより、所定のパッドクリアランスを得る。
【0029】
パッドクリアランスが規定値に達したとき、ステップS4−7に進み、ステップS4−7で、パッド後退制御の要否を判断する。このとき、電動ディスクブレーキ本体2に大きな加速度が作用する車両の悪路走行時、旋回時等においては、その加速度によってブレーキパッド10A、10B及びピストン16が移動する虞があるため、パッド後退制御を実行せず(ノー)、ステップS4−8及びS4−9を実行して、ブレーキパッド10A、10Bの位置(パッドクリアランス)が一定(一般的には0.3mm程度)になるように電動モータ23に制御電流を供給してその位置を制御する。
【0030】
通常走行時には(イエス)、ステップS4−10に進み、ステップS4−10でパッドクリアランスを監視し、パッドクリアランスが制限値(一般的には0.4mm程度)に達している場合は(イエス)、ステップS4−11でパッドクリアランスの目標値を制限値に設定し、ステップS4−9を実行してパッドクリアランスを制限値に調整する。これにより、パッドクリアランスが過度に大きくなるのを防止する。
【0031】
パッドクリアランスが制限値に達していない場合には(ノー)、ステップS4−12でパッド後退制御を実行する。パッド後退制御は、所定のパッドクリアランスに調整されたブレーキパッド10A、10Bに対して、電動モータ23にピストン16を後退させる方向に、ピストン16が後退しない(位置が保持される)程度の最低電流であるパッド後退制御電流を供給することによって行われる。この場合の最低電流とは、ブレーキ力が0となるときの下限電流値付近の電流値のことであり、図3(A)に示される機械効率が良い電動ディスクブレーキ場合には、電流値の0付近(図3(A)中、aで示される部分)が最低電流となる。また、図4(A)に示される機械効率があまり良くない電動ディスクブレーキ場合には、電動モータ23を逆回転させるため電流値の下限値電流値付近(図4(A)中、aで示される部分)が最低電流となる。さらに、図5(A)に示される戻しばねを設けてピストン16を後退方向に常時付勢するようにした電動ディスクブレーキ場合には、戻しばねに抗して電動モータ23の回転を保持するとともにピストン16が後退方向に押圧されたときに戻しばねにしたがって電動モータ23の逆回転させるための電流値の下限値電流値付近(図5(A)中、bで示される部分)が最低電流となる。
【0032】
このようにパッド後退制御電流を最低電流とすることで、ディスクロータ8に面振れが生じて、ディスクロータ8がブレーキパッド10A、10Bに接触したとき、ピストン16が容易に後退するようになる。これにより、ブレーキパッド10A、10Bは、通常は、所定のパッドクリアランスを有する位置に保持されているが、制動による熱変形等によって面振れが生じてディスクロータ8がブレーキパッド10A、10Bに接触した場合には、ブレーキパッド10A、10Bを円滑に後退させることができ、ブレーキパッド10A、10Bの偏摩耗を抑制して、偏摩耗によるブレーキジャダーの発生を防止ことができる。
【0033】
次に、パッド後退制御を実行したときの電動ディスクブレーキ本体2の動作について、図13のタイミングチャートを参照して説明する。なお、図13に示す例では、車速に基づいて、パッド後退制御の要否を決定しており、車速が基準車速Vsに達するまでは、パッド後退制御を実行せず、車速が基準車速Vsに達したときパッド後退制御を実行するようにしている。これは、低速時にはディスクロータ8の面振れが発生しにくくなっているためである。
【0034】
図13を参照して、時間T0で車速が基準車速Vsに達したとき、パッド後退制御の実行を開始し、電動モータ23にパッド後退制御電流Ccを供給してパッドクリアランスを維持したままピストン16を後退方向に付勢する。時間T1で車速が基準車速Vs未満に低下したとき、パッド後退制御を終了してパッド後退制御電流Ccを0にし、通常のパッドクリアランス制御(ブレーキパッド10A、10Bの位置制御)を実行する。
【0035】
そして、図14に示すように、パッド後退制御が実行されると、回転するディスクロータ8の面振れ等によるディスクロータ8のディスク面位置の変化に対して、ディスクロータ8のブレーキパッド10A、10Bへの接触によってピストンが円滑に後退することによって、ブレーキパッド10A、10Bの偏摩耗を抑制する。
【0036】
上述のパッド後退制御では、ディスクロータ8の接触によって後退したピストン16は、その位置で保持されるが、このときのピストン16の移動を監視し、面振れ等によってディスクロータ8が接触してブレーキパッド10A、10B(ピストン16)が後退したとき、パッド後退制御電流を増大させて、その後退位置から更に一定量だけピストン16を後退させるようにしてもよい。これにより、ブレーキパッド10A、10Bの偏摩耗を効果的に抑制することができる。
【0037】
また、上述の例では、パッド後退制御電流Ccとして一定の電流を供給するようにしているが、パッド後退制御電流を所定のパターンで変動させてもよく、いわゆるディザ電流を重畳するようにしてもよい。
【図面の簡単な説明】
【0038】
【図1】本発明の一実施形態に係る電動ディスクブレーキの縦断面図である。
【図2】本発明の一実施形態に係る電動ディスクブレーキ装置の概略構成を示す図である。
【図3】機械的ヒステリシスが小さい電動ディスクブレーキのヒステリシス特性を示すグラフ図である。
【図4】機械的ヒステリシスが大きい電動ディスクブレーキのヒステリシス特性を示すグラフ図である。
【図5】戻しバネを備えた電動ディスクブレーキのヒステリシス特性を示すグラフ図である。
【図6】図2に示す電動ディスクブレーキ装置のブレーキ力とペダルストロークとの関係を示すグラフ図である。
【図7】図2に示すディスクブレーキ装置のコントローラによる制御を示すフローチャートである。
【図8】図7に示すフローチャートのブレーキ制御のサブルーチンを示すフローチャートである。
【図9】図7に示すフローチャートのパッド接触位置検知のサブルーチンを示すフローチャートである。
【図10】図7に示すフローチャートのパッドクリアランス制御のサブルーチンを示すフローチャートである。
【図11】図8に示すブレーキ制御を実行した場合の電動ディスクブレーキの作動を示すタイムチャートである。
【図12】図9に示すパッド位置検知を実行した場合の電動ディスクブレーキの作動を示すタイムチャートである。
【図13】図10に示すパッド後退制御を実行した場合の電動ディスクブレーキの作動を示すタイムチャートである。
【図14】図10に示すパッド後退制御を実行した場合のディスクロータのディスク面位置とピストンの位置との関係を示すタイムチャートである。
【符号の説明】
【0039】
1 電動ディスクブレーキ、7 コントローラ(制御手段)、8 ディスクロータ、10A、10Bブレーキパッド、16 ピストン(パッド押圧部材)、17 ボールランプ機構(回転−直動変換機構)、23 電動モータ、26 レゾルバ(位置検出手段)
【特許請求の範囲】
【請求項1】
電動モータと、該電動モータの回転運動を直線運動に変換する回転−直動変換機構と、該回転−直動変換機構の直線運動によってブレーキパッドをディスクロータに押圧するパッド押圧部材と、制動時に前記パッド押圧部材に目標推力を発生させるように前記電動モータに電流を供給する制御手段とを有し、非制動時に前記パッド押圧部材がブレーキパッドとディスクロータとのクリアランスを一定に保持する電動ディスクブレーキにおいて、
前記制御手段は、非制動時に前記ディスクロータが前記ブレーキパッドに接触したとき、前記パッド押圧部材の後退を許すことを特徴とする電動ディスクブレーキ。
【請求項2】
電動モータと、該電動モータの回転運動を直線運動に変換する回転−直動変換機構と、該回転−直動変換機構の直線運動によってブレーキパッドをディスクロータに押圧するパッド押圧部材と、制動時に前記パッド押圧部材に目標推力を発生させるように前記電動モータに電流を供給する制御手段とを有し、前記パッド押圧部材は、所定位置まで戻った後、前記制御手段が前記電動モータへの電流の供給を遮断してもその位置に保持される電動ディスクブレーキにおいて、
前記制御手段は、非制動時に、前記パッド押圧部材の位置を維持しつつ該パッド押圧部材を後退させる方向に付勢するように前記電動モータに所定のパッド後退制御電流を供給して、前記ディスクロータが前記ブレーキパッドに接触したとき、前記ブレーキパッドの後退を促進することを特徴とする電動ディスクブレーキ。
【請求項3】
前記パッド後退制御電流は、非制動時に前記ディスクロータの接触によって前記ブレーキパッドが後退したとき、その後退位置が維持される大きさの電流であることを特徴とする請求項2に記載の電動ディスクブレーキ。
【請求項4】
前記制御手段は、非制動時に前記ディスクロータが前記ブレーキパッドに接触して前記パッド押圧部材が後退したとき、該パッド押圧部材をその位置から更に所定量だけ後退させることを特徴とする請求項2に記載の電動ディスクブレーキ。
【請求項5】
電動モータと、該電動モータの回転運動を直線運動に変換する回転−直動変換機構と、該回転−直動変換機構の直線運動によってブレーキパッドをディスクロータに押圧するパッド押圧部材と、前記電動モータの回転位置を検出する位置検出手段と、前記パッド押圧部材に目標推力を発生させるように前記電動モータに電流を供給し、非制動時に前記パッド押圧部材を所定位置まで戻してその位置で保持する制御手段とを有する電動ディスクブレーキにおいて、
前記制御手段は、非制動時に前記パッド押圧部材を所定位置に保持し得る最低電流であるパッド後退制御電流を前記電動モータに供給することを特徴とする電動ディスクブレーキ。
【請求項6】
前記制御手段は、非制動時に前記位置検出手段の検出に基づいて前記パッド押圧部材を所定位置に戻した後、前記パッド押圧部材を所定位置に保持するために前記パッド後退制御電流を前記電動モータに供給することを特徴とする請求項5に記載の電動ディスクブレーキ。
【請求項7】
前記制御手段は、非制動時に前記ディスクロータが前記ブレーキパッドに接触して前記パッド押圧部材が後退したとき、該パッド押圧部材をその位置から更に所定量だけ後退させることを特徴とする請求項6に記載の電動ディスクブレーキ。
【請求項8】
前記パッド押圧部材は、付勢手段により後退方向に常時付勢されていることを特徴とする請求項5乃至7のいずれかに記載の電動ディスクブレーキ。
【請求項9】
前記制御手段は、車両の旋回時には、前記電動モータへのパッド後退制御電流の供給を停止することを特徴とする請求項1乃至8のいずれかに記載の電動ディスクブレーキ。
【請求項10】
前記制御手段は、車両の悪路走行時には、前記電動モータへのパッド後退制御電流の供給を停止することを特徴とする請求項1乃至8のいずれかに記載の電動ディスクブレーキ。
【請求項1】
電動モータと、該電動モータの回転運動を直線運動に変換する回転−直動変換機構と、該回転−直動変換機構の直線運動によってブレーキパッドをディスクロータに押圧するパッド押圧部材と、制動時に前記パッド押圧部材に目標推力を発生させるように前記電動モータに電流を供給する制御手段とを有し、非制動時に前記パッド押圧部材がブレーキパッドとディスクロータとのクリアランスを一定に保持する電動ディスクブレーキにおいて、
前記制御手段は、非制動時に前記ディスクロータが前記ブレーキパッドに接触したとき、前記パッド押圧部材の後退を許すことを特徴とする電動ディスクブレーキ。
【請求項2】
電動モータと、該電動モータの回転運動を直線運動に変換する回転−直動変換機構と、該回転−直動変換機構の直線運動によってブレーキパッドをディスクロータに押圧するパッド押圧部材と、制動時に前記パッド押圧部材に目標推力を発生させるように前記電動モータに電流を供給する制御手段とを有し、前記パッド押圧部材は、所定位置まで戻った後、前記制御手段が前記電動モータへの電流の供給を遮断してもその位置に保持される電動ディスクブレーキにおいて、
前記制御手段は、非制動時に、前記パッド押圧部材の位置を維持しつつ該パッド押圧部材を後退させる方向に付勢するように前記電動モータに所定のパッド後退制御電流を供給して、前記ディスクロータが前記ブレーキパッドに接触したとき、前記ブレーキパッドの後退を促進することを特徴とする電動ディスクブレーキ。
【請求項3】
前記パッド後退制御電流は、非制動時に前記ディスクロータの接触によって前記ブレーキパッドが後退したとき、その後退位置が維持される大きさの電流であることを特徴とする請求項2に記載の電動ディスクブレーキ。
【請求項4】
前記制御手段は、非制動時に前記ディスクロータが前記ブレーキパッドに接触して前記パッド押圧部材が後退したとき、該パッド押圧部材をその位置から更に所定量だけ後退させることを特徴とする請求項2に記載の電動ディスクブレーキ。
【請求項5】
電動モータと、該電動モータの回転運動を直線運動に変換する回転−直動変換機構と、該回転−直動変換機構の直線運動によってブレーキパッドをディスクロータに押圧するパッド押圧部材と、前記電動モータの回転位置を検出する位置検出手段と、前記パッド押圧部材に目標推力を発生させるように前記電動モータに電流を供給し、非制動時に前記パッド押圧部材を所定位置まで戻してその位置で保持する制御手段とを有する電動ディスクブレーキにおいて、
前記制御手段は、非制動時に前記パッド押圧部材を所定位置に保持し得る最低電流であるパッド後退制御電流を前記電動モータに供給することを特徴とする電動ディスクブレーキ。
【請求項6】
前記制御手段は、非制動時に前記位置検出手段の検出に基づいて前記パッド押圧部材を所定位置に戻した後、前記パッド押圧部材を所定位置に保持するために前記パッド後退制御電流を前記電動モータに供給することを特徴とする請求項5に記載の電動ディスクブレーキ。
【請求項7】
前記制御手段は、非制動時に前記ディスクロータが前記ブレーキパッドに接触して前記パッド押圧部材が後退したとき、該パッド押圧部材をその位置から更に所定量だけ後退させることを特徴とする請求項6に記載の電動ディスクブレーキ。
【請求項8】
前記パッド押圧部材は、付勢手段により後退方向に常時付勢されていることを特徴とする請求項5乃至7のいずれかに記載の電動ディスクブレーキ。
【請求項9】
前記制御手段は、車両の旋回時には、前記電動モータへのパッド後退制御電流の供給を停止することを特徴とする請求項1乃至8のいずれかに記載の電動ディスクブレーキ。
【請求項10】
前記制御手段は、車両の悪路走行時には、前記電動モータへのパッド後退制御電流の供給を停止することを特徴とする請求項1乃至8のいずれかに記載の電動ディスクブレーキ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2009−35069(P2009−35069A)
【公開日】平成21年2月19日(2009.2.19)
【国際特許分類】
【出願番号】特願2007−199537(P2007−199537)
【出願日】平成19年7月31日(2007.7.31)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
【公開日】平成21年2月19日(2009.2.19)
【国際特許分類】
【出願日】平成19年7月31日(2007.7.31)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
[ Back to top ]