
電動ハンド
【課題】大型化を避けつつ、一対の把持部材の閉じ方向および開き方向のいずれの移動でも把持対象物を把持でき、且つ、停電時にも把持力を失うことがない電動ハンドを提供する。
【解決手段】サーボモータ1と回転軸2とが並列配置となっているので、全体として長尺とならず、小型に構成できる。回転軸2の右ねじ18と左ねじ19にボールナットからなる直動部材3,4を螺合し、回転軸2によって直動部材3,4が互いに反対方向に移動するようになる。そして、直動部材3,4の互いに接近する方向の移動を、第1の連結部材28,29または第2の連結部材によってスライダ24,26の接近する方向の移動または互いに離反する方向の移動に変換し、スライダ24,25に取り付けられる把持部材の閉じ方向の移動および開き方向の移動によって把持対象物を把持する。
【解決手段】サーボモータ1と回転軸2とが並列配置となっているので、全体として長尺とならず、小型に構成できる。回転軸2の右ねじ18と左ねじ19にボールナットからなる直動部材3,4を螺合し、回転軸2によって直動部材3,4が互いに反対方向に移動するようになる。そして、直動部材3,4の互いに接近する方向の移動を、第1の連結部材28,29または第2の連結部材によってスライダ24,26の接近する方向の移動または互いに離反する方向の移動に変換し、スライダ24,25に取り付けられる把持部材の閉じ方向の移動および開き方向の移動によって把持対象物を把持する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、モータにより一対の把持部材を開閉動作させて把持対象物を把持する構成の電動ハンドに関する。
【背景技術】
【0002】
モータにより一対の把持部材を開閉動作させる構成の電動ハンドとしては、特許文献1に開示されたものがある。これは、ステッピングモータと、このステッピングモータの出力軸に直結され先端にねじ部を有した回転軸と、この回転軸に螺挿されるねじを備えた直動部材と、前記一対の把持部材に開閉動作を行わせる開閉機構と、前記直動部材の駆動力を開閉機構に伝動する伝動軸とを有しており、前記伝動軸は、直動部材に対して一定距離だけ移動可能で、把持部材に対して把持動作を行わせる方向にばねで付勢されて直動部材に組み付けられて、把持部材が把持対象物を把持するときは、上記ばねを介して把持する、というものである。
【特許文献1】特開2001−113486号公報
【発明の概要】
【発明が解決しようとする課題】
【0003】
電動ハンドは、各種部品を把持して搬送するなどのために広く用いられている。この電動ハンドでは、停電時に把持力が無くなることが欠点として挙げられるが、特許文献1の電動ハンドでは、把持部材により把持対象物を把持する際、ばねのばね力で把持対象物を把持する状態になるので、停電した場合にも、把持力を保持できる。
しかしながら、ロボットのアームの先端に取り付けて使用する場合には、小形の電動ハンドであることが望まれるが、特許文献1の電動ハンドは、ねじ部を有した回転軸がステッピングモータの出力軸に直結されているので、電動ハンド全体としての長さが回転軸の軸方向に長くなり、大型になり勝ちである。
【0004】
また、特許文献1の電動ハンドでは、一対の把持部材が閉じ方向に移動する場合に把持対象物を把持するようになっているが、把持対象物によっては、例えば把持対象物が有する穴の中に一対の把持部材を挿入して開き方向に移動させることにより当該把持対象物を把持することが好ましい場合もある。しかしながら、開き方向での把持では、ばねの付勢力が把持力として作用せず、停電した場合に、螺合しているねじどうしのがたによって把持力が失われてしまう。
【0005】
本発明は上記の事情に鑑みてなされたもので、その目的は、大型化を避けつつ、停電時にも把持力を失うことがない電動ハンドを提供することにある。
【課題を解決するための手段】
【0006】
本発明では、モータと回転軸とが並列配置となっているので、電動ハンド全体として長尺とならず、小型に構成できる。また、一対の直動部材の移動は一対の把持部材に伝えられるが、一対の直動部材の各々の移動を伝える相手を変更することにより、一対の把持部材の閉じ方向の移動で把持対象物を把持することも、開き方向の移動で把持対象物を把持することもでき、しかも、いずれの方向で把持しても、ばね部材の付勢力を把持力として作用させることができる。
【図面の簡単な説明】
【0007】
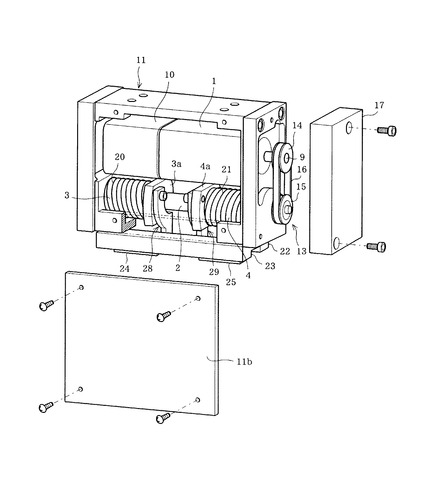
【図1】本発明の一実施形態を示すもので、一部分解して示す斜視図
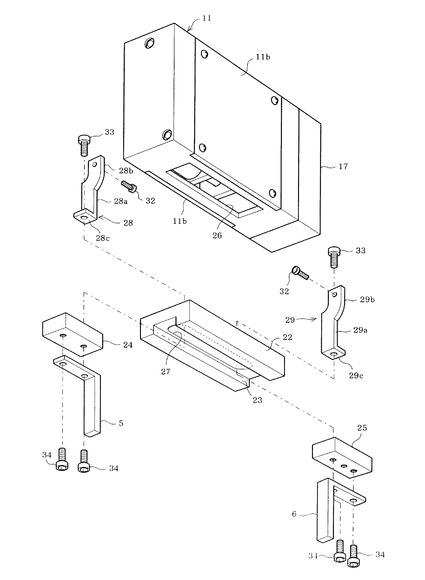
【図2】図1とは別の部分を分解して示す斜視図
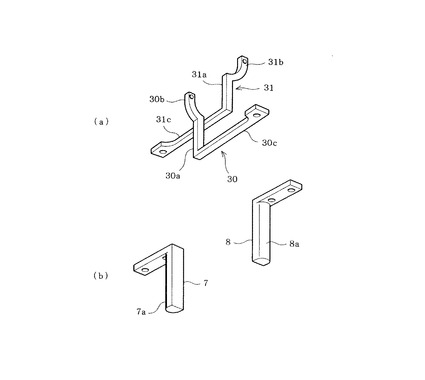
【図3】開き方向の移動で把持する場合に使用する部品を示す斜視図
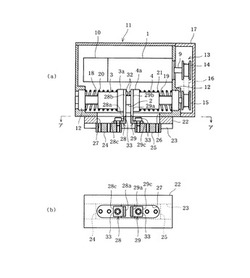
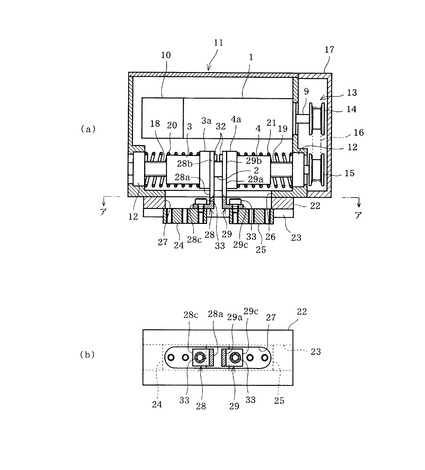
【図4】閉じ方向で把持する場合を示し、(a)は断面図、(b)は(a)のア−ア線に沿う断面図
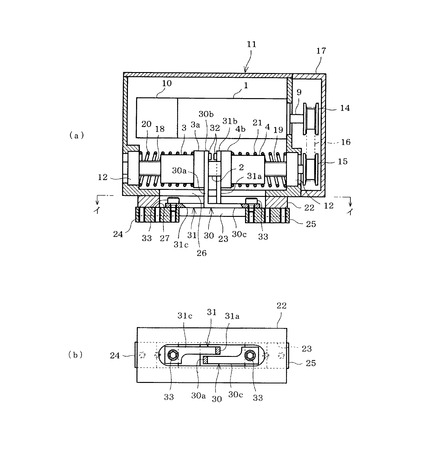
【図5】開き方向で把持する場合を示し、(a)は断面図、(b)は(a)のイ−イ線に沿う断面図
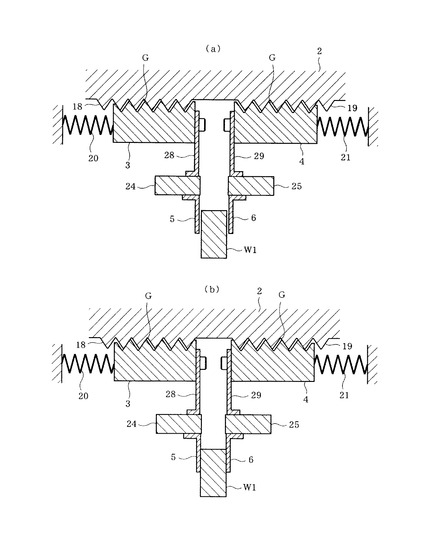
【図6】閉じ方向で把持する場合における圧縮コイルばねの付勢力の作用を説明するための断面図
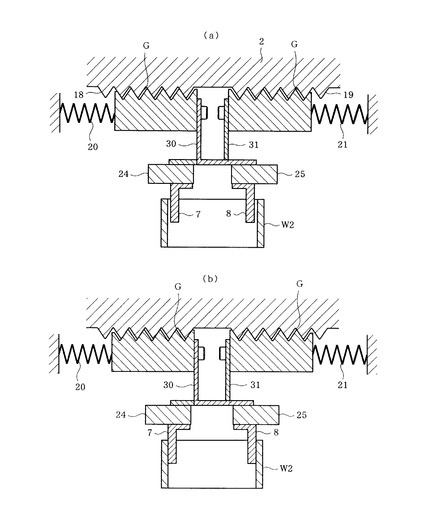
【図7】開き方向で把持する場合における圧縮コイルばねの付勢力の作用を説明するための断面図
【発明を実施するための形態】
【0008】
以下、本発明の一実施形態をロボットのアーム先端に取り付けられる電動ハンドに適用して図面を参照しながら説明する。なお、本実施形態でいうロボットとは、直角座標型ロボット、垂直多関節型ロボット、水平多関節型ロボットのほか、1本のレールに移動体を往復移動可能に設け、この移動体に直動軸(アーム)を移動体の移動方向と直交する方向に移動可能に設けた構成のものも含むとする。
【0009】
図1には、電動ハンドの全体が示されている。この電動ハンドは、例えばサーボモータ1を電動駆動源とし、このサーボモータ1の回転を1本の回転軸2に伝え、この回転軸2の回転運動を変換手段によって一対の直動部材3,4の直線運動に変換する。つまり、回転軸2が一方向に回転する場合には、一対の直動部材3,4が互いに接近する方向に直線移動し、回転軸2が上記一方向とは逆の他方向に回転する場合には、一対の直動部材3,4が互いに離反する方向に直線移動するように構成し、そして、この一対の直動部材3,4の移動によって一対の把持部材を開閉させようとするものである。
【0010】
本実施形態の電動ハンドの第1の特徴は、一対の把持部材の閉じ方向(接近方向)の移動によって把持対象物を把持できると共に、一対の把持部材の開き方向(離反方向)の移動によっても把持対象物を把持できることにある。第2の特徴は、一対の直動部材3,4の互いに接近する方向と互いに離反する方向のうちの一方、例えば互いに接近する方向に一対の直動部材3,4を付勢するばね部材が設けられていること、そして、第3の特徴は、上記ばね部材によって付勢された方向に一対の直動部材3,4が移動するとき、一対の直動部材3,4と一対の把持部材との連結の仕方によって一対の把持部材を閉じ方向にも、開き方向にも移動させることができ、一対の把持部材の閉じ方向の移動によって把持対象物を把持した場合でも、一対の把持部材の開き方向の移動によって把持対象物を把持した場合でも、ばね部材のばね力を把持力として効かすことができることである。
【0011】
なお、一対の把持部材の開き方向の移動によって把持対象物を把持する事例としては、把持対象物に例えば穴が形成されていて一対の把持部材をその穴内に挿入して開き方向に移動させることで一対の把持部材を穴の内周面の互いに反対側に押し当てて把持することが考えられる。その他、把持対象物に一対の凸部が存在する場合に、一対の把持部材を一対の凸部の間に差し入れて開き方向に移動させることによって把持する場合など種々考えられる。
【0012】
一対の把持部材としては、閉じ方向で把持する場合と開き方向で把持する場合とを兼用するものであっても良いし、異なるものを用いても良い。本実施形態では、閉じ方向と開き方向とで異なる把持部材を用いるものとし、図2の一対の第1の把持部材5,6を閉じ方向把持で用い、図3(b)の一対の第2の把持部材7,8を開き方向把持で用いるものとする。なお、開き方向把持で用いる第2の把持部材7,8が閉じ方向把持で用いる第1の把持部材5,6と異なるところは、把持対象物の穴の内周面に押し当てられる側面を穴の内周面の円弧に合わせて円弧状側面7a,8aに形成したところにある。
【0013】
さて、前述のサーボモータ1は、図4にも示すように、出力軸9の回転位置を検出するためのロータリエンコーダ(回転センサ)10を備え、電動ハンドの四角い箱型の本体11内に取り付けられている。このサーボモータ1の制御部(図示せず)は、ロータリエンコーダ10から出力される回転位置検出信号をフィードバック信号としてサーボモータ1を制御する。
【0014】
前記回転軸2は、本体11内にサーボモータ1の出力軸9と平行となるように配設され、両端部が軸受12によって回転可能に支持されている。この回転軸2とサーボモータ1の出力軸9は、共に一端部が本体11の側面から外方に突出しており、その回転軸2と出力軸9の一端部間は伝動機構、例えばベルト伝動機構13により連結されている。つまり、回転軸2と出力軸9の一端部には、それぞれ歯付きプーリー14,15が取着されている。そして、両歯付きプーリー14,15間に歯付きベルト16が掛け渡されている。したがって、サーボモータ1が起動すると、その出力軸9の回転がベルト伝動機構13によって回転軸2に伝達される。なお、ベルト伝動機構13は、本体11に取り付けられたカバー17によって覆い隠されている。
【0015】
回転軸2には、変換手段としての右ねじ18と左ねじ19が形成されている。そして、この回転軸2の右ねじ18と左ねじ19には、それぞれ内側に右ねじ18と左ねじ19に螺合するねじ手段としてのボール(図示せず)を収納した前記直動部材(ボールナット)3,4が嵌合されている。したがって、回転軸2が回転すると、両直動部材3,4は互いに反対方向に直線移動する。
【0016】
両直動部材3,4の互いに対向する端面部は径大部3a,4aとして形成されている。そして、両直動部材3,4には、ばね部材としての圧縮コイルばね20,21が巻装されており、直動部材3側の圧縮コイルばね20は、両端を径大部3aおよび一方の軸受12に押し当て、直動部材4側の圧縮コイルばね21は、両端を径大部4aおよび他方の軸受12に押し当てている。このように設けられた圧縮コイルばね20,21は、直動部材3,4を互いに反対方向である接近方向に付勢している。
【0017】
本体11の直動部材3,4近くの外側面には、案内部材22が取り付けられている。この案内部材22には、直動部材3,4の移動方向と同方向に延びる案内溝23が形成されており、この案内溝23に一対のスライダ24,25が摺動可能に嵌め込まれている。本体11の外側面および案内部材22には、本体11内と案内溝23との間を連通させる細長い開口部26,27が形成されている。
【0018】
一対のスライダ24,25は、図2の一対の第1の連結部材28,29または図3(a)の一対の第2の連結部材30,31によって一対の直動部材3,4に連結される。具体的には、第1の連結部材28,29を用いる場合には、図4に示すように、一方の直動部材3は一方の第1の連結部材28によって一方のスライダ24に連結され、他方の直動部材4は、他方の第1の連結部材29によって他方のスライダ25に連結される。また、第2の連結部材30,31を用いる場合には、図5に示すように、一方の直動部材3は一方の第2の連結部材30によって他方のスライダ25に連結され、他方の直動部材4は、他方の第2の連結部材30によって一方のスライダ24に連結される。
【0019】
ここで、上記両第1の連結部材28,29および両第2の連結部材30,31の具体的形態を説明する。両第1の連結部材28,29は、レッグ部28a,29aの一端側に円弧状に曲がる取付部28b,29bを有しており、両第2の連結部材30,31は、レッグ部30a,31aの一端側に同じく円弧状に曲がる連結部30b,31bを有している。そして、図4(a)に示すように、両第1の連結部材28,29のうちの一方の第1の連結部材28の連結部28bは、一方の直動部材3の径大部3aの端面にねじ32によって着脱可能に取り付けられ、他方の第1の連結部材29の連結部29bは、他方の直動部材4の径大部4aの端面にねじ32によって着脱可能に取り付けられる。
【0020】
また、図5(a)に示すように、両第2の連結部材30,31のうちの一方の第2の連結部材30の連結部30aは、一方の直動部材3の径大部3aの端面にねじ32によって着脱可能に取り付けられ、他方の第2の連結部材30の連結部31aは、他方の直動部材4の径大部4aの端面に別のねじ32によって着脱可能に取り付けられる。
【0021】
図4に示すように、両直動部材3,4に取り付けられた状態で両第1の連結部材28,29のレッグ部28a,29aの他端部は、案内部材22の開口部27内にあり、このレッグ部28a,29aの他端部に、互いに離れる方向に延びる短いL字形の取付部28c,29cが形成されている。そして、取付部28cがスライダ24にねじ33によって着脱可能に取り付けられ、取付部29cがスライダ25に別のねじ33によって着脱可能に取り付けられる。
【0022】
一方、図5に示すように、両直動部材3,4に取り付けられた状態で両第2の連結部材30,31のレッグ部30a,31aの他端部は、案内部材22の開口部27内にあって互いに干渉しないように当該開口部27の幅方向の一方側および他方側に偏って位置し、このレッグ部の他端部に互いに接近する方向に伸びる長いL字形の取付部30c,31cが延長されている。そして、取付部30cがスライダ25にねじ33によって着脱可能に取り付けられ、取付部31cがスライダ24にねじ33によって着脱可能に取り付けられている。
【0023】
以上のような第1の連結部材28,29および第2の連結部材30,31を選択的に用いて一対の直動部材3,4と一対のスライダ24,25とを連結することにより、直動部材3,4の互いに接近する方向の移動によって、スライダ24,25が互いに接近する方向に移動され(第1の連結部材28,29を用いた場合)、或いはスライダ24,25が互いに離反する方向に移動する(第2の連結部材30,31を用いた場合)ようになる。
【0024】
そして、このスライダ24,25に第1の把持部材5,6または第2の把持部材7,8が選択的に取り付けられる。つまり、直動部材3,4とスライダ24,25とを、第1の連結部材28,29を用いて連結した場合には、スライダ24,25に第1の把持部材5,6を図2に示すねじ34によって着脱可能に取り付け、第2の連結部材30,31を用いて連結した場合には、スライダ24,25に第2の把持部材7,8を別のねじ34によって着脱可能に取り付ける。
なお、直動部材3,4とスライダ24,25とを連結する部材を交換するには、本体11の着脱可能な側板11aを取り外して行う。側板11aは、本体11の両側に取り付けられているが、図1では、反対側の側板は省略してある。
【0025】
次に上記構成の作用を説明する。まず、把持対象物を外側から把持する一対の第1の把持部材5,6を使用する場合、本体11の両側の側板11aを取り外して直動部材3,4を本体11の両側から見得るようにしておく。そして、一対のスライダ24,25を案内部材22から外し、一方のスライダ24に一方の第1の連結部材28の取付部28cをねじ33により取り付け、他方のスライダ25に他方の第1の連結部材29の取付部29cをねじ33により取り付ける。
【0026】
続いて、両第1の連結部材28,29の連結部28b,29bを案内部材22の開口部27および本体11の開口部26に通すようにして一対のスライダ24,25を案内溝23内に嵌め入れる。そして、本体11内に挿入された一方の第1の連結部材28の連結部28bを一方の直動部材3の径大部3a端面にねじ32により取り付け、同じく他方の第1の連結部材29の連結部29bを他方の直動部材4の径大部4aの端面にねじ32により取り付ける。その後、スライダ24,25に第1の把持部材5,6をねじ34によって取り付ける。また、両側板11aを本体11に取り付ける。
【0027】
この状態でサーボモータ1が起動してその出力軸9が正逆回転すると、回転軸2が一方向および他方向に回転される。そして、回転軸2の一方向の回転により一対の直動部材3,4が互いに接近する方向に移動し、これに連動してスライダ24,25も互いに接近する方向に移動する。この移動時において、直動部材3,4には、圧縮コイルばね20,21によって互いに接近する方向の付勢力が与えられているため、図6(a)に示すように、直動部材3,4と回転軸2の右ねじ18、左ねじ19との間のがたGは、右ねじ18、左ねじ19のねじ山から見て圧縮コイルばね20,21の付勢方向側に存在する。なお、直動部材3,4のねじ手段は、ボールであってねじ山ではないが、図6では、分かり易くするために、ねじ山として示した(後述の図7も同様)。
【0028】
そして、一対の第1の把持部材5,6間に把持対象物W1が把持されると、スライダ24,25ひいては直動部材3,4はそこで停止する。しかしながら、回転軸2ひいてはサーボモータ1は、その後もがたG分だけ若干回転し、がたG分だけ回転したところで、サーボモータ1が過負荷となるため、停止する。すると、ロータリエンコーダ10が回転を検出しなくなるので、図示しない制御部はサーボモータ1を断電する。
【0029】
この状態では、図6(b)に示すように、直動部材3,4と左ねじ19、右ねじ18との間のがたGは、右ねじ18、左ねじ19のねじ山から見て圧縮コイルばね20,21の付勢方向とは反対側に存在する。このため、サーボモータ1が断電されても、両圧縮コイルばね20,21から直動部材3,4に与えられる付勢力が右ねじ18、左ねじ19のねじ山にて受けられることなく、一対の第1の把持部材5,6に及ぶようになり、一対の第1の把持部材5,6は、圧縮コイルばね20,21の付勢力によって回転軸2の回転を規制して把持対象物W1を把持し続ける。
【0030】
次に、把持対象物を内側から把持する一対の第2の把持部材7,8を使用する場合、前述したと同様に、本体11の両側の側板11aを取り外す。そして、第1の把持部材5,6の連結部5b,6bを直動部材3,4から取り外し、スライダ24,25を案内部材22から外し、第1の把持部材5,6をスライダ24,25から外す。
その後、一方のスライダ24に他方の第2の連結部材30の取付部31cをねじ33により取り付け、他方のスライダ25に一方の第2の連結部材30の取付部30cをねじ33により取り付ける。続いて、両第2の連結部材30,31の連結部30b,31bを案内部材22の開口部27および本体11の開口部26に通すようにして一対のスライダ24,25を案内溝23内に嵌め入れる。次に本体11内に挿入された一方の第2の連結部材30の連結部30bを一方の直動部材3の径大部3aの端面にねじ32により取り付け、同じく他方の第2の連結部材30の連結部31bを他方の直動部材4の径大部4aの端面にねじ32により取り付ける。その後、スライダ24,25に第2の把持部材7,8をねじ34によって取り付ける。また、両側板11aを本体11に取り付ける。
【0031】
この状態でサーボモータ1が起動してその出力軸9が正逆回転すると、回転軸2が一方向および逆方向に回転される。そして、回転軸2の一方向の回転により一対の直動部材3,4が互いに接近する方向に移動すると、これに連動してスライダ24,25が互いに離反する方向に移動し、第2の把持部材7,8は開き方向に移動する。この移動時、前述したと同様に、図7(a)に示すように、直動部材3,4と右ねじ18、左ねじ19との間のがたGは、右ねじ18、左ねじ19のねじ山から見て圧縮コイルばね20,21の付勢方向側に存在する。
そして、一対の第2の把持部材7,8間に把持対象物W2が把持されると、スライダ24,25ひいては直動部材3,4がそこで停止する。しかしながら、回転軸2(サーボモータ1)は、その後もがたG分だけ若干回転して停止する。すると、ロータリエンコーダ10の回転を検出しなくなるので、図示しない制御部はサーボモータ1を断電する。
【0032】
この状態では、直動部材3,4と左ねじ19、右ねじ18との間のがたGは、図7(b)に示すように、右ねじ18、左ねじ19のねじ山から見て圧縮コイルばね20,21の付勢方向とは反対側に存在する。このため、両圧縮コイルばね20,21から直動部材3,4に与えられる付勢力が右ねじ18、左ねじ19のねじ山に受けられることなく、一対の第2の把持部材7,8に及ぶので、サーボモータ1が断電されても、一対の第2の把持部材7,8は回転軸2の回転を規制して把持対象物W2を把持し続ける。
【0033】
このように本実施形態によれば、回転軸2がサーボモータ1と並列に配設されているので、本体11としては、サーボモータ1の出力軸9に回転軸2を直結する場合とは異なり、それ程長尺にならず、小型化できる。
また、本実施形態では、把持対象物を、把持部材の閉じ方向の移動および開き方向の移動のいずれによってでも把持することができる。その上、把持対象物を、把持部材の閉じ方向の移動および開き方向の移動のいずれで把持する場合でも、圧縮コイルばね20,21のばね力を把持力として作用させることができ、サーボモータ1を断電しても把持対象物の把持が解除される恐れはない。
【0034】
なお、本発明は上記し且つ図面に示す実施形態に限定されるものではなく、以下のような拡張或いは変更が可能である。
駆動源としてのモータは、ステッピングモータであっても良い。
サーボモータ1から回転軸9へは、歯車伝動機構によって回転伝達する構成であっても良い。
圧縮コイルばねを一対の直動部材3,4間に介在させて直動部材3,4を互いに離反する方向に付勢し、直動部材3,4の離反方向の移動によって一対の把持部材を閉じ方向或いは開き方向に移動させて把持対象物を把持するようにしても良い。
スライダ24,25を省略し、直動部材3,4を第1の連結部材28,29或いは第2の連結部材30,31によって第1の把持部材5,6或いは第2の把持部材7,8に連結する構成としても良い。
ばね部材としては、圧縮コイルばねに限られず、引張コイルばねを用いても良い。また、コイルばねに限られない。
電動ハンドの用途としては、ロボットに取り付けられるものに限られない。
【符号の説明】
【0035】
図面中、1はサーボモータ、2は回転軸、3,4は直動部材、5,6は第1の把持部材、7,8は第2の把持部材、11は本体、13はベルト伝動機構、18は右ねじ、19は左ねじ、20,21は圧縮コイルばね(ばね部材)、22は案内部材、24,25はスライダ、28,29は第1の把持部材、30,31は第2の把持部材を示す。
【技術分野】
【0001】
本発明は、モータにより一対の把持部材を開閉動作させて把持対象物を把持する構成の電動ハンドに関する。
【背景技術】
【0002】
モータにより一対の把持部材を開閉動作させる構成の電動ハンドとしては、特許文献1に開示されたものがある。これは、ステッピングモータと、このステッピングモータの出力軸に直結され先端にねじ部を有した回転軸と、この回転軸に螺挿されるねじを備えた直動部材と、前記一対の把持部材に開閉動作を行わせる開閉機構と、前記直動部材の駆動力を開閉機構に伝動する伝動軸とを有しており、前記伝動軸は、直動部材に対して一定距離だけ移動可能で、把持部材に対して把持動作を行わせる方向にばねで付勢されて直動部材に組み付けられて、把持部材が把持対象物を把持するときは、上記ばねを介して把持する、というものである。
【特許文献1】特開2001−113486号公報
【発明の概要】
【発明が解決しようとする課題】
【0003】
電動ハンドは、各種部品を把持して搬送するなどのために広く用いられている。この電動ハンドでは、停電時に把持力が無くなることが欠点として挙げられるが、特許文献1の電動ハンドでは、把持部材により把持対象物を把持する際、ばねのばね力で把持対象物を把持する状態になるので、停電した場合にも、把持力を保持できる。
しかしながら、ロボットのアームの先端に取り付けて使用する場合には、小形の電動ハンドであることが望まれるが、特許文献1の電動ハンドは、ねじ部を有した回転軸がステッピングモータの出力軸に直結されているので、電動ハンド全体としての長さが回転軸の軸方向に長くなり、大型になり勝ちである。
【0004】
また、特許文献1の電動ハンドでは、一対の把持部材が閉じ方向に移動する場合に把持対象物を把持するようになっているが、把持対象物によっては、例えば把持対象物が有する穴の中に一対の把持部材を挿入して開き方向に移動させることにより当該把持対象物を把持することが好ましい場合もある。しかしながら、開き方向での把持では、ばねの付勢力が把持力として作用せず、停電した場合に、螺合しているねじどうしのがたによって把持力が失われてしまう。
【0005】
本発明は上記の事情に鑑みてなされたもので、その目的は、大型化を避けつつ、停電時にも把持力を失うことがない電動ハンドを提供することにある。
【課題を解決するための手段】
【0006】
本発明では、モータと回転軸とが並列配置となっているので、電動ハンド全体として長尺とならず、小型に構成できる。また、一対の直動部材の移動は一対の把持部材に伝えられるが、一対の直動部材の各々の移動を伝える相手を変更することにより、一対の把持部材の閉じ方向の移動で把持対象物を把持することも、開き方向の移動で把持対象物を把持することもでき、しかも、いずれの方向で把持しても、ばね部材の付勢力を把持力として作用させることができる。
【図面の簡単な説明】
【0007】
【図1】本発明の一実施形態を示すもので、一部分解して示す斜視図
【図2】図1とは別の部分を分解して示す斜視図
【図3】開き方向の移動で把持する場合に使用する部品を示す斜視図
【図4】閉じ方向で把持する場合を示し、(a)は断面図、(b)は(a)のア−ア線に沿う断面図
【図5】開き方向で把持する場合を示し、(a)は断面図、(b)は(a)のイ−イ線に沿う断面図
【図6】閉じ方向で把持する場合における圧縮コイルばねの付勢力の作用を説明するための断面図
【図7】開き方向で把持する場合における圧縮コイルばねの付勢力の作用を説明するための断面図
【発明を実施するための形態】
【0008】
以下、本発明の一実施形態をロボットのアーム先端に取り付けられる電動ハンドに適用して図面を参照しながら説明する。なお、本実施形態でいうロボットとは、直角座標型ロボット、垂直多関節型ロボット、水平多関節型ロボットのほか、1本のレールに移動体を往復移動可能に設け、この移動体に直動軸(アーム)を移動体の移動方向と直交する方向に移動可能に設けた構成のものも含むとする。
【0009】
図1には、電動ハンドの全体が示されている。この電動ハンドは、例えばサーボモータ1を電動駆動源とし、このサーボモータ1の回転を1本の回転軸2に伝え、この回転軸2の回転運動を変換手段によって一対の直動部材3,4の直線運動に変換する。つまり、回転軸2が一方向に回転する場合には、一対の直動部材3,4が互いに接近する方向に直線移動し、回転軸2が上記一方向とは逆の他方向に回転する場合には、一対の直動部材3,4が互いに離反する方向に直線移動するように構成し、そして、この一対の直動部材3,4の移動によって一対の把持部材を開閉させようとするものである。
【0010】
本実施形態の電動ハンドの第1の特徴は、一対の把持部材の閉じ方向(接近方向)の移動によって把持対象物を把持できると共に、一対の把持部材の開き方向(離反方向)の移動によっても把持対象物を把持できることにある。第2の特徴は、一対の直動部材3,4の互いに接近する方向と互いに離反する方向のうちの一方、例えば互いに接近する方向に一対の直動部材3,4を付勢するばね部材が設けられていること、そして、第3の特徴は、上記ばね部材によって付勢された方向に一対の直動部材3,4が移動するとき、一対の直動部材3,4と一対の把持部材との連結の仕方によって一対の把持部材を閉じ方向にも、開き方向にも移動させることができ、一対の把持部材の閉じ方向の移動によって把持対象物を把持した場合でも、一対の把持部材の開き方向の移動によって把持対象物を把持した場合でも、ばね部材のばね力を把持力として効かすことができることである。
【0011】
なお、一対の把持部材の開き方向の移動によって把持対象物を把持する事例としては、把持対象物に例えば穴が形成されていて一対の把持部材をその穴内に挿入して開き方向に移動させることで一対の把持部材を穴の内周面の互いに反対側に押し当てて把持することが考えられる。その他、把持対象物に一対の凸部が存在する場合に、一対の把持部材を一対の凸部の間に差し入れて開き方向に移動させることによって把持する場合など種々考えられる。
【0012】
一対の把持部材としては、閉じ方向で把持する場合と開き方向で把持する場合とを兼用するものであっても良いし、異なるものを用いても良い。本実施形態では、閉じ方向と開き方向とで異なる把持部材を用いるものとし、図2の一対の第1の把持部材5,6を閉じ方向把持で用い、図3(b)の一対の第2の把持部材7,8を開き方向把持で用いるものとする。なお、開き方向把持で用いる第2の把持部材7,8が閉じ方向把持で用いる第1の把持部材5,6と異なるところは、把持対象物の穴の内周面に押し当てられる側面を穴の内周面の円弧に合わせて円弧状側面7a,8aに形成したところにある。
【0013】
さて、前述のサーボモータ1は、図4にも示すように、出力軸9の回転位置を検出するためのロータリエンコーダ(回転センサ)10を備え、電動ハンドの四角い箱型の本体11内に取り付けられている。このサーボモータ1の制御部(図示せず)は、ロータリエンコーダ10から出力される回転位置検出信号をフィードバック信号としてサーボモータ1を制御する。
【0014】
前記回転軸2は、本体11内にサーボモータ1の出力軸9と平行となるように配設され、両端部が軸受12によって回転可能に支持されている。この回転軸2とサーボモータ1の出力軸9は、共に一端部が本体11の側面から外方に突出しており、その回転軸2と出力軸9の一端部間は伝動機構、例えばベルト伝動機構13により連結されている。つまり、回転軸2と出力軸9の一端部には、それぞれ歯付きプーリー14,15が取着されている。そして、両歯付きプーリー14,15間に歯付きベルト16が掛け渡されている。したがって、サーボモータ1が起動すると、その出力軸9の回転がベルト伝動機構13によって回転軸2に伝達される。なお、ベルト伝動機構13は、本体11に取り付けられたカバー17によって覆い隠されている。
【0015】
回転軸2には、変換手段としての右ねじ18と左ねじ19が形成されている。そして、この回転軸2の右ねじ18と左ねじ19には、それぞれ内側に右ねじ18と左ねじ19に螺合するねじ手段としてのボール(図示せず)を収納した前記直動部材(ボールナット)3,4が嵌合されている。したがって、回転軸2が回転すると、両直動部材3,4は互いに反対方向に直線移動する。
【0016】
両直動部材3,4の互いに対向する端面部は径大部3a,4aとして形成されている。そして、両直動部材3,4には、ばね部材としての圧縮コイルばね20,21が巻装されており、直動部材3側の圧縮コイルばね20は、両端を径大部3aおよび一方の軸受12に押し当て、直動部材4側の圧縮コイルばね21は、両端を径大部4aおよび他方の軸受12に押し当てている。このように設けられた圧縮コイルばね20,21は、直動部材3,4を互いに反対方向である接近方向に付勢している。
【0017】
本体11の直動部材3,4近くの外側面には、案内部材22が取り付けられている。この案内部材22には、直動部材3,4の移動方向と同方向に延びる案内溝23が形成されており、この案内溝23に一対のスライダ24,25が摺動可能に嵌め込まれている。本体11の外側面および案内部材22には、本体11内と案内溝23との間を連通させる細長い開口部26,27が形成されている。
【0018】
一対のスライダ24,25は、図2の一対の第1の連結部材28,29または図3(a)の一対の第2の連結部材30,31によって一対の直動部材3,4に連結される。具体的には、第1の連結部材28,29を用いる場合には、図4に示すように、一方の直動部材3は一方の第1の連結部材28によって一方のスライダ24に連結され、他方の直動部材4は、他方の第1の連結部材29によって他方のスライダ25に連結される。また、第2の連結部材30,31を用いる場合には、図5に示すように、一方の直動部材3は一方の第2の連結部材30によって他方のスライダ25に連結され、他方の直動部材4は、他方の第2の連結部材30によって一方のスライダ24に連結される。
【0019】
ここで、上記両第1の連結部材28,29および両第2の連結部材30,31の具体的形態を説明する。両第1の連結部材28,29は、レッグ部28a,29aの一端側に円弧状に曲がる取付部28b,29bを有しており、両第2の連結部材30,31は、レッグ部30a,31aの一端側に同じく円弧状に曲がる連結部30b,31bを有している。そして、図4(a)に示すように、両第1の連結部材28,29のうちの一方の第1の連結部材28の連結部28bは、一方の直動部材3の径大部3aの端面にねじ32によって着脱可能に取り付けられ、他方の第1の連結部材29の連結部29bは、他方の直動部材4の径大部4aの端面にねじ32によって着脱可能に取り付けられる。
【0020】
また、図5(a)に示すように、両第2の連結部材30,31のうちの一方の第2の連結部材30の連結部30aは、一方の直動部材3の径大部3aの端面にねじ32によって着脱可能に取り付けられ、他方の第2の連結部材30の連結部31aは、他方の直動部材4の径大部4aの端面に別のねじ32によって着脱可能に取り付けられる。
【0021】
図4に示すように、両直動部材3,4に取り付けられた状態で両第1の連結部材28,29のレッグ部28a,29aの他端部は、案内部材22の開口部27内にあり、このレッグ部28a,29aの他端部に、互いに離れる方向に延びる短いL字形の取付部28c,29cが形成されている。そして、取付部28cがスライダ24にねじ33によって着脱可能に取り付けられ、取付部29cがスライダ25に別のねじ33によって着脱可能に取り付けられる。
【0022】
一方、図5に示すように、両直動部材3,4に取り付けられた状態で両第2の連結部材30,31のレッグ部30a,31aの他端部は、案内部材22の開口部27内にあって互いに干渉しないように当該開口部27の幅方向の一方側および他方側に偏って位置し、このレッグ部の他端部に互いに接近する方向に伸びる長いL字形の取付部30c,31cが延長されている。そして、取付部30cがスライダ25にねじ33によって着脱可能に取り付けられ、取付部31cがスライダ24にねじ33によって着脱可能に取り付けられている。
【0023】
以上のような第1の連結部材28,29および第2の連結部材30,31を選択的に用いて一対の直動部材3,4と一対のスライダ24,25とを連結することにより、直動部材3,4の互いに接近する方向の移動によって、スライダ24,25が互いに接近する方向に移動され(第1の連結部材28,29を用いた場合)、或いはスライダ24,25が互いに離反する方向に移動する(第2の連結部材30,31を用いた場合)ようになる。
【0024】
そして、このスライダ24,25に第1の把持部材5,6または第2の把持部材7,8が選択的に取り付けられる。つまり、直動部材3,4とスライダ24,25とを、第1の連結部材28,29を用いて連結した場合には、スライダ24,25に第1の把持部材5,6を図2に示すねじ34によって着脱可能に取り付け、第2の連結部材30,31を用いて連結した場合には、スライダ24,25に第2の把持部材7,8を別のねじ34によって着脱可能に取り付ける。
なお、直動部材3,4とスライダ24,25とを連結する部材を交換するには、本体11の着脱可能な側板11aを取り外して行う。側板11aは、本体11の両側に取り付けられているが、図1では、反対側の側板は省略してある。
【0025】
次に上記構成の作用を説明する。まず、把持対象物を外側から把持する一対の第1の把持部材5,6を使用する場合、本体11の両側の側板11aを取り外して直動部材3,4を本体11の両側から見得るようにしておく。そして、一対のスライダ24,25を案内部材22から外し、一方のスライダ24に一方の第1の連結部材28の取付部28cをねじ33により取り付け、他方のスライダ25に他方の第1の連結部材29の取付部29cをねじ33により取り付ける。
【0026】
続いて、両第1の連結部材28,29の連結部28b,29bを案内部材22の開口部27および本体11の開口部26に通すようにして一対のスライダ24,25を案内溝23内に嵌め入れる。そして、本体11内に挿入された一方の第1の連結部材28の連結部28bを一方の直動部材3の径大部3a端面にねじ32により取り付け、同じく他方の第1の連結部材29の連結部29bを他方の直動部材4の径大部4aの端面にねじ32により取り付ける。その後、スライダ24,25に第1の把持部材5,6をねじ34によって取り付ける。また、両側板11aを本体11に取り付ける。
【0027】
この状態でサーボモータ1が起動してその出力軸9が正逆回転すると、回転軸2が一方向および他方向に回転される。そして、回転軸2の一方向の回転により一対の直動部材3,4が互いに接近する方向に移動し、これに連動してスライダ24,25も互いに接近する方向に移動する。この移動時において、直動部材3,4には、圧縮コイルばね20,21によって互いに接近する方向の付勢力が与えられているため、図6(a)に示すように、直動部材3,4と回転軸2の右ねじ18、左ねじ19との間のがたGは、右ねじ18、左ねじ19のねじ山から見て圧縮コイルばね20,21の付勢方向側に存在する。なお、直動部材3,4のねじ手段は、ボールであってねじ山ではないが、図6では、分かり易くするために、ねじ山として示した(後述の図7も同様)。
【0028】
そして、一対の第1の把持部材5,6間に把持対象物W1が把持されると、スライダ24,25ひいては直動部材3,4はそこで停止する。しかしながら、回転軸2ひいてはサーボモータ1は、その後もがたG分だけ若干回転し、がたG分だけ回転したところで、サーボモータ1が過負荷となるため、停止する。すると、ロータリエンコーダ10が回転を検出しなくなるので、図示しない制御部はサーボモータ1を断電する。
【0029】
この状態では、図6(b)に示すように、直動部材3,4と左ねじ19、右ねじ18との間のがたGは、右ねじ18、左ねじ19のねじ山から見て圧縮コイルばね20,21の付勢方向とは反対側に存在する。このため、サーボモータ1が断電されても、両圧縮コイルばね20,21から直動部材3,4に与えられる付勢力が右ねじ18、左ねじ19のねじ山にて受けられることなく、一対の第1の把持部材5,6に及ぶようになり、一対の第1の把持部材5,6は、圧縮コイルばね20,21の付勢力によって回転軸2の回転を規制して把持対象物W1を把持し続ける。
【0030】
次に、把持対象物を内側から把持する一対の第2の把持部材7,8を使用する場合、前述したと同様に、本体11の両側の側板11aを取り外す。そして、第1の把持部材5,6の連結部5b,6bを直動部材3,4から取り外し、スライダ24,25を案内部材22から外し、第1の把持部材5,6をスライダ24,25から外す。
その後、一方のスライダ24に他方の第2の連結部材30の取付部31cをねじ33により取り付け、他方のスライダ25に一方の第2の連結部材30の取付部30cをねじ33により取り付ける。続いて、両第2の連結部材30,31の連結部30b,31bを案内部材22の開口部27および本体11の開口部26に通すようにして一対のスライダ24,25を案内溝23内に嵌め入れる。次に本体11内に挿入された一方の第2の連結部材30の連結部30bを一方の直動部材3の径大部3aの端面にねじ32により取り付け、同じく他方の第2の連結部材30の連結部31bを他方の直動部材4の径大部4aの端面にねじ32により取り付ける。その後、スライダ24,25に第2の把持部材7,8をねじ34によって取り付ける。また、両側板11aを本体11に取り付ける。
【0031】
この状態でサーボモータ1が起動してその出力軸9が正逆回転すると、回転軸2が一方向および逆方向に回転される。そして、回転軸2の一方向の回転により一対の直動部材3,4が互いに接近する方向に移動すると、これに連動してスライダ24,25が互いに離反する方向に移動し、第2の把持部材7,8は開き方向に移動する。この移動時、前述したと同様に、図7(a)に示すように、直動部材3,4と右ねじ18、左ねじ19との間のがたGは、右ねじ18、左ねじ19のねじ山から見て圧縮コイルばね20,21の付勢方向側に存在する。
そして、一対の第2の把持部材7,8間に把持対象物W2が把持されると、スライダ24,25ひいては直動部材3,4がそこで停止する。しかしながら、回転軸2(サーボモータ1)は、その後もがたG分だけ若干回転して停止する。すると、ロータリエンコーダ10の回転を検出しなくなるので、図示しない制御部はサーボモータ1を断電する。
【0032】
この状態では、直動部材3,4と左ねじ19、右ねじ18との間のがたGは、図7(b)に示すように、右ねじ18、左ねじ19のねじ山から見て圧縮コイルばね20,21の付勢方向とは反対側に存在する。このため、両圧縮コイルばね20,21から直動部材3,4に与えられる付勢力が右ねじ18、左ねじ19のねじ山に受けられることなく、一対の第2の把持部材7,8に及ぶので、サーボモータ1が断電されても、一対の第2の把持部材7,8は回転軸2の回転を規制して把持対象物W2を把持し続ける。
【0033】
このように本実施形態によれば、回転軸2がサーボモータ1と並列に配設されているので、本体11としては、サーボモータ1の出力軸9に回転軸2を直結する場合とは異なり、それ程長尺にならず、小型化できる。
また、本実施形態では、把持対象物を、把持部材の閉じ方向の移動および開き方向の移動のいずれによってでも把持することができる。その上、把持対象物を、把持部材の閉じ方向の移動および開き方向の移動のいずれで把持する場合でも、圧縮コイルばね20,21のばね力を把持力として作用させることができ、サーボモータ1を断電しても把持対象物の把持が解除される恐れはない。
【0034】
なお、本発明は上記し且つ図面に示す実施形態に限定されるものではなく、以下のような拡張或いは変更が可能である。
駆動源としてのモータは、ステッピングモータであっても良い。
サーボモータ1から回転軸9へは、歯車伝動機構によって回転伝達する構成であっても良い。
圧縮コイルばねを一対の直動部材3,4間に介在させて直動部材3,4を互いに離反する方向に付勢し、直動部材3,4の離反方向の移動によって一対の把持部材を閉じ方向或いは開き方向に移動させて把持対象物を把持するようにしても良い。
スライダ24,25を省略し、直動部材3,4を第1の連結部材28,29或いは第2の連結部材30,31によって第1の把持部材5,6或いは第2の把持部材7,8に連結する構成としても良い。
ばね部材としては、圧縮コイルばねに限られず、引張コイルばねを用いても良い。また、コイルばねに限られない。
電動ハンドの用途としては、ロボットに取り付けられるものに限られない。
【符号の説明】
【0035】
図面中、1はサーボモータ、2は回転軸、3,4は直動部材、5,6は第1の把持部材、7,8は第2の把持部材、11は本体、13はベルト伝動機構、18は右ねじ、19は左ねじ、20,21は圧縮コイルばね(ばね部材)、22は案内部材、24,25はスライダ、28,29は第1の把持部材、30,31は第2の把持部材を示す。
【特許請求の範囲】
【請求項1】
ハンド本体に設けられたモータの回転を一対の把持部材の開閉動作に変換して把持対象物を把持する電動ハンドにおいて、
前記ハンド本体に、前記モータの出力軸と平行となるように回転可能に設けられ、外周に右ねじおよび左ねじを形成した回転軸と、
前記モータの前記出力軸の回転を前記回転軸に伝達する伝動機構と、
前記回転軸の前記右ねじおよび前記左ねじにそれぞれ螺合するねじ手段を有し、前記回転軸の一方向の回転および前記一方向とは逆の他方向の回転に伴って互いに接近する方向および互いに離反する方向に移動する一対の直動部材と、
前記回転軸の径方向外側に巻装され、前記一対の直動部材を互いに接近する方向および互いに離反する方向のうちのいずれか一方の方向に付勢するばね部材と、
前記一対の直動部材と、前記一対の把持部材とを連結する連結手段と、
を備えることを特徴とする電動ハンド。
【請求項1】
ハンド本体に設けられたモータの回転を一対の把持部材の開閉動作に変換して把持対象物を把持する電動ハンドにおいて、
前記ハンド本体に、前記モータの出力軸と平行となるように回転可能に設けられ、外周に右ねじおよび左ねじを形成した回転軸と、
前記モータの前記出力軸の回転を前記回転軸に伝達する伝動機構と、
前記回転軸の前記右ねじおよび前記左ねじにそれぞれ螺合するねじ手段を有し、前記回転軸の一方向の回転および前記一方向とは逆の他方向の回転に伴って互いに接近する方向および互いに離反する方向に移動する一対の直動部材と、
前記回転軸の径方向外側に巻装され、前記一対の直動部材を互いに接近する方向および互いに離反する方向のうちのいずれか一方の方向に付勢するばね部材と、
前記一対の直動部材と、前記一対の把持部材とを連結する連結手段と、
を備えることを特徴とする電動ハンド。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−196760(P2012−196760A)
【公開日】平成24年10月18日(2012.10.18)
【国際特許分類】
【出願番号】特願2012−148423(P2012−148423)
【出願日】平成24年7月2日(2012.7.2)
【分割の表示】特願2008−279786(P2008−279786)の分割
【原出願日】平成20年10月30日(2008.10.30)
【出願人】(501428545)株式会社デンソーウェーブ (1,155)
【Fターム(参考)】
【公開日】平成24年10月18日(2012.10.18)
【国際特許分類】
【出願日】平成24年7月2日(2012.7.2)
【分割の表示】特願2008−279786(P2008−279786)の分割
【原出願日】平成20年10月30日(2008.10.30)
【出願人】(501428545)株式会社デンソーウェーブ (1,155)
【Fターム(参考)】
[ Back to top ]