
電動パワーステアリング用の電子制御ユニット
【課題】小型の電動パワーステアリング用の電子制御ユニットを提供する。
【解決手段】電動モータと一体に形成される電動パワーステアリング用の電子制御ユニットは、外部のバッテリの正極及び負極の電位を入力する第1及び第2の入力端子B+,B−を有する外部コネクタと、電動モータに駆動信号を供給するスイッチング回路、駆動信号の元となる電源電圧を平滑する電解コンデンサ210及びスイッチング回路を制御する制御回路を有する制御基板200と、制御基板200を格納するユニットカバーと、を備える。制御基板200は、ノーマルフィルタとして機能するコイル220及びコモンフィルタとして機能する第1〜第4のセラミックコンデンサC1〜C4を有する。C1の容量は、C3の容量と同じであり、C1の容量よりも小さいC2の容量は、C4の容量と同じである。
【解決手段】電動モータと一体に形成される電動パワーステアリング用の電子制御ユニットは、外部のバッテリの正極及び負極の電位を入力する第1及び第2の入力端子B+,B−を有する外部コネクタと、電動モータに駆動信号を供給するスイッチング回路、駆動信号の元となる電源電圧を平滑する電解コンデンサ210及びスイッチング回路を制御する制御回路を有する制御基板200と、制御基板200を格納するユニットカバーと、を備える。制御基板200は、ノーマルフィルタとして機能するコイル220及びコモンフィルタとして機能する第1〜第4のセラミックコンデンサC1〜C4を有する。C1の容量は、C3の容量と同じであり、C1の容量よりも小さいC2の容量は、C4の容量と同じである。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電動パワーステアリング用の電子制御ユニット等に関する。
【背景技術】
【0002】
自動車等の車両は、電動パワーステアリング装置を備えることができ、電動パワーステアリング装置は、ステアリングハンドルへの運転者による操作によって生じるステアリング系での操舵トルクを補助する補助トルクを発生させる。補助トルクの発生により、電動パワーステアリング装置は、運転者の負担を軽減することができる。補助トルクを与える補助トルク機構は、ステアリング系の操舵トルクを操舵トルクセンサで検出し、この検出信号に基づき電子制御ユニットで駆動信号を発生し、この駆動信号に基づき操舵トルクに応じた補助トルクを電動モータで発生し、補助トルクを減速機構を介してステアリング系に伝達する。
【0003】
例えば特許文献1は、電動パワーステアリング用の電子制御ユニットの構造を開示する。特許文献1の図3のモータ制御装置200(電子制御ユニット)は、モータ100の側部に、モータ100と一体に形成されている。また、特許文献1の図10は、モータ制御装置200の回路構成を開示し、CFで示された位置にコモンフィルタを配置する代わりに、以下の(1)〜(3)を実施している。
(1)N側バスバ230BNNとPCB制御グラウンド225GS(制御モジュール220に実装)とをN側電源配線225Nで電気的に接続する。
(2)PCB制御グラウンド225GSとPCBパワーグラウンド225GPとをダイオード226Dを介して電気的に接続する。
(3)PCBパワーグラウンド225GPと下アーム側ソース端子LSとをゲート戻り線GPで電気的に接続する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−63242号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
一般に、電動パワーステアリング用の電子制御ユニットは、小型であることが望ましい。また、コモンフィルタは、コイルで構成されて、電子制御ユニットの小型を抑制してしまう。言い換えれば、電動モータと一体に形成される電動パワーステアリング用の電子制御ユニットでは、コイルで構成される大型のコモンフィルタを採用することができない。特許文献1の図10は、モータ100と一体に形成されるモータ制御装置200において、コモンフィルタを採用しないで半導体スイッチング素子SSWからのノイズを対策するものであるが、モータ100等のモータ制御装置200の外部からのノイズを対策するものではない。
【0006】
本発明の1つの目的は、小型の電動パワーステアリング用の電子制御ユニットを提供することである。本発明の他の目的は、以下に例示する態様及び好ましい実施形態、並びに添付の図面を参照することによって、当業者に明らかになるであろう。
【課題を解決するための手段】
【0007】
以下に、本発明の概要を容易に理解するために、本発明に従う態様を例示する。
【0008】
本発明に従う第1の態様は、電動モータと一体に形成される電動パワーステアリング用の電子制御ユニットであって、
外部のバッテリの正極の電位を入力する第1の入力端子及び前記外部のバッテリの負極の電位を入力する第2の入力端子を有する外部コネクタと、
前記電動モータに駆動信号を供給するスイッチング回路、前記駆動信号の元となる電源電圧を平滑する電解コンデンサ、及び前記スイッチング回路を制御する制御回路を有する制御基板と、
前記制御基板を格納するユニットカバーと、
を備え、
前記電解コンデンサの一端は、前記第1の入力端子及び前記スイッチング回路に接続される第1の電位ラインに接続されるとともに、前記電解コンデンサの他端は、前記第2の入力端子及び前記スイッチング回路に接続される第2の電位ラインに接続され、
前記制御基板は、コイル、第1のセラミックコンデンサ、第2のセラミックコンデンサ、第3のセラミックコンデンサ及び第4のセラミックコンデンサを更に有し、
前記コイルは、前記第1の電位ラインに直列に、前記電解コンデンサに対して前記スイッチング回路の側ではなく、前記第1の入力端子の側に設けられ、
前記第1のセラミックコンデンサは、前記ユニットカバーに接続される第3の電位ラインと前記第1の電位ラインとの間に、前記スイッチング回路の前記側ではなく、前記第1の入力端子の前記側に設けられ、
前記第1のセラミックコンデンサの容量よりも小さい容量を有する前記第2のセラミックコンデンサは、前記第3の電位ラインと前記第1の電位ラインとの間に、前記スイッチング回路の前記側ではなく、前記第1の入力端子の前記側に設けられ、
前記第1のセラミックコンデンサの容量と同じ容量を有する前記第3のセラミックコンデンサは、前記第3の電位ラインと前記第2の電位ラインとの間に設けられ、
前記第2のセラミックコンデンサの容量と同じ容量を有する前記第4のセラミックコンデンサは、前記第3の電位ラインと前記第2の電位ラインとの間に設けられることを特徴とする電動パワーステアリング用の電子制御ユニットに関係する。
【0009】
第1のセラミックコンデンサは、第1の電位ライン(外部のバッテリの正極の電位)と第3の電位ライン(ユニットカバーの電位)との間に設けられ、第1のセラミックコンデンサの容量と同じ容量を有する第3のセラミックコンデンサは、第3の電位ラインと第2の電位ライン(外部のバッテリの負極の電位)との間に設けられている。従って、コモンモードノイズが第1の電位ライン及び第2の電位ラインに伝導し、第1の入力端子及び第2の入力端子を介して電子制御ユニットに進入しても、第1のセラミックコンデンサ及び第3のセラミックコンデンサで、コモンモードノイズを除去又は低減することができる。コモンフィルタとしてコイルを採用する必要がないので、小型の電動パワーステアリング用の電子制御ユニットを提供することができる。
【0010】
さらに、第1のセラミックコンデンサの容量よりも小さい容量を有する第2のセラミックコンデンサは、第1の電位ラインと第3の電位ラインとの間に設けられ、第2のセラミックコンデンサの容量と同じ容量を有する第4のセラミックコンデンサは、第3の電位ラインと第2の電位ラインとの間に設けられている。コモンモードノイズが第1のセラミックコンデンサ及び第3のセラミックコンデンサで対処することができる周波数のコモンモードノイズ(低周波側のコモンモードノイズ)だけでなく、その周波数よりも高い周波数コモンモードノイズ(高周波側のコモンモードノイズ)を含む場合がある。このような場合、第2のセラミックコンデンサ及び第4のセラミックコンデンサで、高周波側のコモンモードノイズを除去又は低減することができる。従って、第1〜第4のセラミックコンデンサで、広範囲のコモンモードノイズを除去又は低減することができる。
【0011】
仮に、コモンフィルタとして低周波側のコモンモードノイズに対処するコイルだけでなく、高周波側のコモンモードノイズに対処するコイルも採用する場合、電子制御ユニットの更なる大型化を招いてしまう。
【0012】
第1の態様において、前記第1のセラミックコンデンサ及び前記第3のセラミックコンデンサの容量は、1[μF]〜10[μF]の範囲であってもよく、
前記第2のセラミックコンデンサ及び前記第4のセラミックコンデンサの容量は、1000[pF]〜0.47[μF]の範囲であってもよい。
【0013】
第1のセラミックコンデンサ及び第3のセラミックコンデンサでAM周波数帯のコモンモードノイズ(低周波側のコモンモードノイズ)に対処することができるとともに、第2のセラミックコンデンサ及び第4のセラミックコンデンサでFM周波数帯のコモンモードノイズ(高周波側のコモンモードノイズ)に対処することができる。
【0014】
仮に、コモンフィルタとしてAM周波数帯のコモンモードノイズに対処するコイルだけでなく、FM周波数帯のコモンモードノイズに対処するコイルも採用する場合、電子制御ユニットの更なる大型化を招いてしまう。
【0015】
第1の態様において、前記コイルは、ノーマルフィルタとして機能してもよく、
前記第1のセラミックコンデンサ、前記第2のセラミックコンデンサ、前記第3のセラミックコンデンサ及び前記第4のセラミックコンデンサは、コモンフィルタとして機能してもよい。
【0016】
ノーマルフィルタの前段にコモンフィルタを設ける電動パワーステアリング用の電子制御ユニットにより、広範囲のコモンモードノイズを除去又は低減することができる。
【0017】
当業者は、例示した本発明に従う態様が、本発明の精神を逸脱することなく、さらに変更され得ることを容易に理解できるであろう。
【図面の簡単な説明】
【0018】
【図1】電動パワーステアリング装置の概略構成例を示す。
【図2】本発明に従う電動パワーステアリング用の電子制御ユニットの外観例を示す。
【図3】図2のユニットカバーを含む電子制御ユニットの分解斜視図の1例を示す。
【図4】図3の第1の入力端子及び第2の入力端子側に設けられた第1〜第4のセラミックコンデンサを有する制御基板を表す回路構成図の1例を示す。
【図5】図4のスイッチング回路を制御する制御回路を有する制御基板の機能ブロック図の1例を示す。
【発明を実施するための形態】
【0019】
以下に説明する好ましい実施形態は、本発明を容易に理解するために用いられている。従って、当業者は、本発明が、以下に説明される実施形態によって不当に限定されないことを留意すべきである。
【0020】
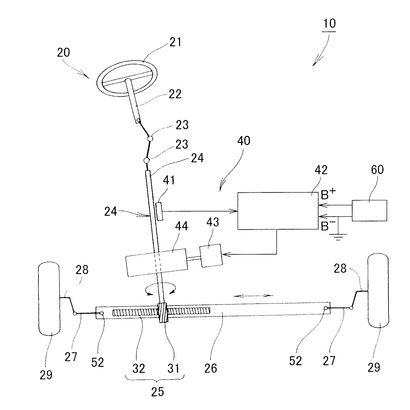
図1は、電動パワーステアリング装置10の概略構成例を示す。図1の例において、電動パワーステアリング装置10は、電動パワーステアリング用の電子制御ユニット(制御部とも言う。)42を備える。具体的には、電動パワーステアリング装置10は、車両のステアリングハンドル(例えばステアリングホイール)21から車両の操舵車輪(例えば前輪)29,29に至るステアリング系20に補助トルク(付加トルクとも言う。)を与える補助トルク機構40を備えている。
【0021】
図1の例において、ステアリング系20は、ステアリングハンドル21にステアリングシャフト22(ステアリングコラムとも言う。)及び自在軸継手23,23を介して回転軸24(ピニオン軸、入力軸とも言う。)を連結し、回転軸24にラックアンドピニオン機構25を介してラック軸26を連結し、ラック軸26の両端に左右のボールジョイント52,52、タイロッド27,27及びナックル28,28を介して左右の操舵車輪29,29を連結したものである。ラックアンドピニオン機構25は、回転軸24に有したピニオン31と、ラック軸26に有したラック32とを備える。
【0022】
ステアリング系20によれば、運転者がステアリングハンドル21を操舵することで、その操舵トルクによりラックアンドピニオン機構25を介して、操舵車輪29,29を操舵することができる。
【0023】
図1の例において、補助トルク機構40は、ステアリングハンドル21に加えたステアリング系20の操舵トルクを操舵トルクセンサ41で検出し、この検出信号(トルク信号とも言う。)に基づき電子制御ユニット42で駆動信号を発生し、この駆動信号に基づき操舵トルクに応じた補助トルク(付加トルク)を電動モータ43で発生し、補助トルクを減速機構44(例えばウォームギヤ機構)を介して回転軸24に伝達し、さらに、補助トルクを回転軸24からステアリング系20のラックアンドピニオン機構25に伝達するようにした機構である。
【0024】
補助トルクがステアリング系20に与えられる箇所によって、電動パワーステアリング装置10は、ピニオンアシスト型、ラックアシスト型、コラムアシスト型等に分類することができる。図1の電動パワーステアリング装置10は、ピニオンアシスト型を示しているが、電動パワーステアリング装置10は、ラックアシスト型、コラムアシスト型等に適用してもよい。
【0025】
電動モータ43は、例えばブラシレスモータであり、ブラシレスモータにおけるロータの回転角又は電動モータ43の回転角(回転信号とも言う。)は、電子制御ユニット42によって検出される。ロータは、例えば永久磁石で構成され、電子制御ユニット42は、永久磁石(N極及びS極)の動きを磁気センサで検出することができる。
【0026】
電子制御ユニット42は、例えば、電源回路、モータ電流(実電流)を検出する電流センサ、マイクロプロセッサ、FETブリッジ回路、磁気センサ等によって構成される。電子制御ユニット42は、トルク信号だけでなく、例えば車速信号も入力することができる。車速信号は、図示せぬ車速センサから電子制御ユニット42に供給されてもよく、図示せぬ他の電子制御ユニットから例えばCAN(Controller Area Network)等の車内ネットワークを介して電子制御ユニット42に供給されてもよい。マイクロプロセッサは、トルク信号、車速信号等に基づいて、電動モータ43をベクトル制御することができる。マイクロプロセッサによって制御されるFETブリッジ回路は、例えば、電動モータ43(ブラシレスモータ)に駆動電流(3相交流電流)を通電するスイッチング回路111,FET1,FET2,FET3,FET4,FET5,FET6(図4参照)によって構成される。磁気センサは、例えばホールIC(図5参照)によって構成される。
【0027】
このような電子制御ユニット42は、少なくとも操舵トルク(トルク信号)に基づいて目標電流を設定し、好ましくは、車速センサによって検出された車速(車速信号)及び磁気センサによって検出されたロータの回転角(回転信号)も考慮して、目標電流を設定する。電子制御ユニット42は、電流センサによって検出されたモータ電流(実電流)が目標電流に一致するように、電動モータ43の駆動電流(駆動信号)を制御することができる。
【0028】
B+は、例えば車両に直流電源として設けられるバッテリ60の正極の電位を示し、B−は、そのバッテリ60の負極の電位を示し、負極の電位B−は、車両の車体に接地することができる。なお、電子制御ユニット42は、外部コネクタ440(図2参照)を備え、外部コネクタ440は、バッテリ60からの電力を電子制御ユニット42に供給することができ、電源電圧(正極の電位B+と負極の電位B−との差)は、電動モータ43の駆動信号の元となる。
【0029】
電動パワーステアリング装置10によれば、運転者の操舵トルクに電動モータ43の補助トルク(付加トルク)を加えた複合トルクにより、ラック軸26で操舵車輪29,29を操舵することができる。
【0030】
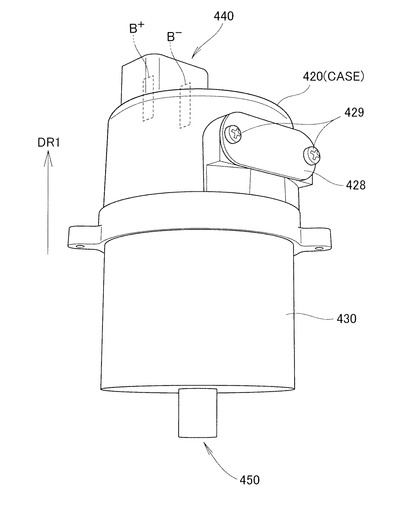
図2は、本発明に従う電動パワーステアリング用の電子制御ユニットの外観例を示す。図2の例において、ユニットカバー420は、図1の電子制御ユニット42のカバーであり、モータカバー430は、図1の電動モータ43のカバーである。電動モータ43のモータ軸450の方向にユニットカバー420が配置されるように、電子制御ユニット42は、電動モータ430と一体に形成される。図2の例において、方向DR1が電動モータ43の上を指す場合、電子制御ユニット42は、電動モータ43の上部に電動モータ43と一体に形成することができる。なお、外部コネクタ440は、モータ軸450の方向(方向DR1)に突き出し、外部のバッテリ60の正極の電位を入力する第1の入力端子B+及び外部のバッテリ60の負極の電位を入力する第2の入力端子B−を有するとともに、操舵トルクセンサ41等と電子制御ユニット42とを接続する少なくとも1つの端子460(図3参照)を有している。なお、電子制御ユニット42は、例えば特許文献1と同様に、電動モータ43の側部に電動モータ43と一体に形成してもよい。
【0031】
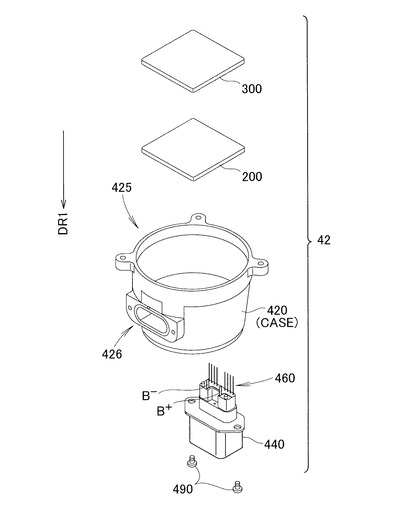
図3は、図2のユニットカバー420を含む電子制御ユニット42の分解斜視図の1例を示す。図3の例において、電動パワーステアリング用の電子制御ユニット42は、例えば2つの基板200,300からなる制御基板を備えるとともに、制御基板を格納するユニットカバー420を備える。なお、制御基板は、2つの基板200,300で概念的に示されており、正確な形状が示されているものではない。また、制御基板は、図3の例に限定されず。例えば1つの基板又は3つの基板で構成してもよい。制御基板又は例えば基板200は、電動モータ43に駆動信号を供給するスイッチング回路110(図4参照)を有する。制御基板又は例えば基板200は、駆動信号の元となる電源電圧を平滑する電解コンデンサ210を有する。制御基板又は例えば基板300は、スイッチング回路110を制御する制御回路(図5参照)を有する。
【0032】
図3の例において、外部コネクタ440は、少なくとも1つの雄ネジ490を介してユニットカバー420に固定することができる。制御基板を構成する基板200,300を格納可能なユニットカバー420の開口部425は、モータカバー430によって閉じられている(図2参照)。なお、開口部425は、ユニットカバー420の頂部の開口であり、開口部426は、ユニットカバー420の側部の開口であり、開口部426は、板状の蓋428及び雄ネジ429によって閉じられている(図2参照)。板状の蓋428は、電動モータ43への出力端子U,V,W(図4参照)を覆うことができる。
【0033】
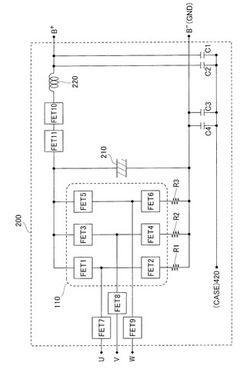
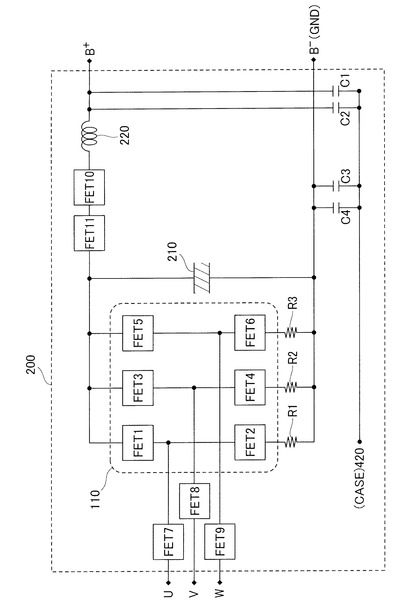
図4は、図3の第1の入力端子B+及び第2の入力端子B−側に設けられた第1〜第4のセラミックコンデンサC1〜C4を有する基板200又は制御基板を表す回路構成図の1例を示す。図4の例において、第1の入力端子B+は、バッテリ60の正極と接続される端子であり、第2の入力端子B−は、そのバッテリ60の負極(車体GND)と接続される端子である。基板200又は制御基板は、外部コネクタ440の第1の入力端子B+及び第2の入力端子B−と接続されている。
【0034】
図4の例において、第1の入力端子B+に接続される第1の電位ライン、第2の入力端子B−に接続される第2の電位ライン、及びユニットカバー420に接続される第3の電位ラインが示されている。ユニットカバー420は、例えば金属で構成され、基板200又は制御基板は、ユニットカバー420(第3の電位CASE)と接続されている。電源電圧(正極の電位B+と負極の電位B−との差)を平滑する電解コンデンサ210の一端は、第1の電位ライン(B+)に接続されるとともに、電解コンデンサ210の他端は、第2の入力端子(B−)に接続されている。
【0035】
図4の例において、電動モータ43に駆動信号を供給するスイッチング回路111は、6つのFET1〜FET6から構成される3相FETブリッジ回路FET1〜FET6であり、第1の電位ライン(B+)及び第2の電位ライン(B−)に対して、電解コンデンサ210と並列に接続されている。第1の電位ライン(B+)は、第1の入力端子B+及びスイッチング回路111に接続され、第2の電位ライン(B−)は、第2の入力端子B−及びスイッチング回路111に接続される。なお、スイッチング回路111は、FET以外の複数のスイッチングトランジスタ(例えばIGBT)で構成してもよい。
【0036】
基板200又は制御基板は、ノイズフィルタとしてコイル220を有することができる。コイル220は、第1の電位ライン(B+)に直列に、電解コンデンサ210に対してスイッチング回路110の側ではなく、第1の入力端子B+の側に設けられている。コイル220は、ノーマルノイズを除去又は低減することができ、ノーマルフィルタとして機能する。
【0037】
基板200又は制御基板は、コモンフィルタとして機能する第1〜第4のセラミックコンデンサC1,C2,C3,C4を更に有する。第1のセラミックコンデンサC1は、第1の電位ライン(B+)と第3の電位ライン(ユニットカバー420の電位CASE)との間に、電解コンデンサ210に対してスイッチング回路110の側ではなく、第1の入力端子B+の側に設けられる。第1のセラミックコンデンサC1の容量と同じ容量を有する第3のセラミックコンデンサC3は、第3の電位ライン(CASE)と第2の電位ライン(B−)との間に設けられる。従って、コモンモードノイズが第1の電位ライン(B+)及び第2の電位ライン(B−)に伝導し、第1の入力端子B+及び第2の入力端子B−を介して電子制御ユニット42に進入しても、第1のセラミックコンデンサC1及び第3のセラミックコンデンサC3で、コモンモードノイズを除去又は低減することができる。基板200又は制御基板は、コモンフィルタとしてコイルを採用する必要がないので、小型の電子制御ユニット420を提供することができる。
【0038】
さらに、第1のセラミックコンデンサC1の容量よりも小さい容量を有する第2のセラミックコンデンサC2は、第1の電位ライン(B+)と第3の電位ライン(CASE)との間に、電解コンデンサ210に対してスイッチング回路110の側ではなく、第1の入力端子B+の側に設けられる。第2のセラミックコンデンサC2の容量と同じ容量を有する第4のセラミックコンデンサC4は、第3の電位ライン(CASE)と第2の電位ライン(B−)との間に設けられている。
【0039】
第1〜第4のセラミックコンデンサC1,C2,C3,C4は、スイッチング回路110の前段に設けることができ、第1のセラミックコンデンサC1及び第2のセラミックコンデンサC2は、コイル220の前段に設けることができる。第1のセラミックコンデンサC1及び第3のセラミックコンデンサC3の容量は、例えば1[μF]〜10[μF]の範囲に設定されており、第2のセラミックコンデンサC2及び第4のセラミックコンデンサC2の容量は、例えば1000[pF]〜0.47[μF]の範囲に設定されている。
【0040】
コモンモードノイズが第1のセラミックコンデンサ及び第3のセラミックコンデンサで対処することができる例えばAM周波数帯の周波数のコモンモードノイズ(低周波側のコモンモードノイズ)だけでなく、その周波数よりも高い例えばFM周波数帯の周波数コモンモードノイズ(高周波側のコモンモードノイズ)を含む場合がある。このような場合、第2のセラミックコンデンサC2及び第4のセラミックコンデンサC4で、高周波側のコモンモードノイズを除去又は低減することができる。従って、第1〜第4のセラミックコンデンサC1,C2,C3,C4で、広範囲のコモンモードノイズを除去又は低減することができる。
【0041】
仮に、基板200又は制御基板がコモンフィルタとしてAM周波数帯のコモンモードノイズに対処するコイルだけでなく、FM周波数帯のコモンモードノイズに対処するコイルも採用する場合、電子制御ユニットの更なる大型化を招いてしまう。
【0042】
加えて、第1〜第4のセラミックコンデンサC1,C2,C3,C4は、電動モータ430と一体に形成される電子制御ユニット42内に設置されるので、第1〜第4のセラミックコンデンサC1,C2,C3,C4と電動モータ430とを近づけることができる。従って、第1〜第4のセラミックコンデンサC1,C2,C3,C4は、電動モータ430に起因するコモンモードノイズを効果的に除去又は低減することができる。
【0043】
スイッチング回路111のFET1及びFET2は、正極の電位B+と負極の電位B−との間に直列に接続され、電動モータ43の例えばU巻線を流れるU相電流を生成することができる。U相電流を検出するための電流センサとして例えばシャント抵抗R1をFET2と負極の電位B−との間に設けることができ、U相電流を遮断可能な半導体リレーとして例えばFET7をFET1とFET2との接続ノードと電動モータ43への出力端子Uとの間に設けることができる。
【0044】
FET3及びFET4は、正極の電位B+と負極の電位B−との間に直列に接続され、電動モータ43の例えばV巻線を流れるV相電流を生成することができる。V相電流を検出するための電流センサとして例えばシャント抵抗R2をFET4と負極の電位B−との間に設けることができ、V相電流を遮断可能な半導体リレーとして例えばFET8をFET3とFET4との接続ノードと電動モータ43への出力端子Vとの間に設けることができる。
【0045】
FET5及びFET6は、正極の電位B+と負極の電位B−との間に直列に接続され、電動モータ43の例えばW巻線を流れるW相電流を生成することができる。W相電流を検出するための電流センサとして例えばシャント抵抗R3をFET6と負極の電位B−との間に設けることができ、W相電流を遮断可能な半導体リレーとして例えばFET9をFET5とFET6との接続ノードと電動モータ43への出力端子Wとの間に設けることができる。
【0046】
図4の例において、スイッチング回路110は、駆動信号としてU相電流、V相電流及びW相電流を電動モータ43に供給することができる。FET1、FET3及びFET5は、バッテリ60からの電力を遮断可能な半導体リレーとして例えばFET10及びFET11を介して、正極の電位B+に接続されている。FET1〜FET11の各々は、駆動回路(図5参照)と接続される図示せぬゲートを有し、オン又はオフされる。
【0047】
なお、FET2とシャント抵抗R1との接続ノード、FET4とシャント抵抗R2との接続ノード及びFET6とシャント抵抗R3との接続ノードは、入力回路を介してマイクロプロセッサ(図5参照)に接続され、これらの接続ノードの電位からU相電流、V相電流及びW相電流を求めることができる。
【0048】
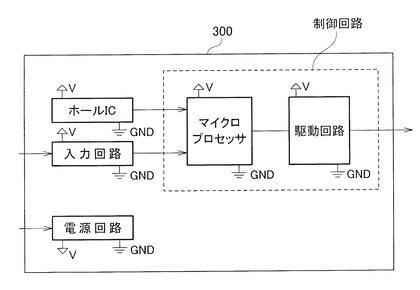
図5は、図4のスイッチング回路110を制御する制御回路を有する基板300又は制御基板の機能ブロック図の1例を示す。図5の例において、制御回路は、マイクロプロセッサ及び駆動回路で構成され、基板300又は制御基板は、磁気センサとしてのホールICだけでなく、制御回路、入力回路及び電源回路も有することができる。
【0049】
制御回路は、少なくともスイッチング回路110(FET1〜FET6)を制御し、マイクロプロセッサは、目標電流を設定することができる。目標電流は、入力回路を介して取り込まれるトルク信号及びモータ電流(実電流)、並びにホールICを介して取り込まれる回転信号等によって設定される。駆動回路は、目標電流に基づいて、FET1〜FET6に対応する6つの制御信号(ゲート信号)を生成する。FET1〜FET6は、6つの制御信号(ゲート信号)によってオン又はオフされ、これにより、電動モータ43に駆動信号(駆動電流)が供給される。
【0050】
制御回路は、半導体リレー(FET7〜FET11)を制御することもできる。この場合、マイクロプロセッサは、FET7〜FET11の各々のオン又はオフを決定し、駆動回路は、これらの決定に基づいて、FET7〜FET11に対応する5つの制御信号(ゲート信号)を生成することができる。電源回路は、図4のスイッチング回路110と同様に、第1〜第4のセラミックコンデンサC1,C2,C3,C4の後段又は電解コンデンサ210の後段に設けれ、第1の電位ライン(B+)及び第2の電位ライン(B−)に接続され、ホールIC、入力回路、マイクロプロセッサ及び駆動回路の電源を生成することができる。言い換えれば、電源回路はバッテリ60の電源電圧(正極の電位B+と負極の電位B−との差)をロジックの電源電圧(電位Vと電位GNDとの差)に変換することができる。
【0051】
本発明は、上述の例示的な実施形態に限定されず、また、当業者は、上述の例示的な実施形態を特許請求の範囲に含まれる範囲まで、容易に変更することができるであろう。
【符号の説明】
【0052】
10・・・電動パワーステアリング装置、20・・・ステアリング系、21・・・ステアリングハンドル、22・・・ステアリングシャフト、23・・・自在軸継手、24・・・回転軸、25・・・ラックアンドピニオン機構、26・・・ラック軸、27・・・タイロッド、28・・・ナックル、29・・・操舵車輪、31・・・ピニオン、32・・・ラック、40・・・補助トルク機構、41・・・操舵トルクセンサ、42・・・電子制御ユニット(制御部)、43・・・電動モータ、44・・・減速機構、52・・・ボールジョイント、60・・・バッテリ、110・・・スイッチング回路、200,300・・・基板(制御基板)、210・・・電解コンデンサ、220・・・コイル、420・・・ユニットカバー、425,426・・・開口部、428・・・蓋、429・・・雄ネジ、430・・・モータカバー、440・・・外部コネクタ、450・・・モータ軸、460・・・端子、490・・・雄ネジ、C1,C2,C3,C4・・・セラミックコンデンサ。
【技術分野】
【0001】
本発明は、電動パワーステアリング用の電子制御ユニット等に関する。
【背景技術】
【0002】
自動車等の車両は、電動パワーステアリング装置を備えることができ、電動パワーステアリング装置は、ステアリングハンドルへの運転者による操作によって生じるステアリング系での操舵トルクを補助する補助トルクを発生させる。補助トルクの発生により、電動パワーステアリング装置は、運転者の負担を軽減することができる。補助トルクを与える補助トルク機構は、ステアリング系の操舵トルクを操舵トルクセンサで検出し、この検出信号に基づき電子制御ユニットで駆動信号を発生し、この駆動信号に基づき操舵トルクに応じた補助トルクを電動モータで発生し、補助トルクを減速機構を介してステアリング系に伝達する。
【0003】
例えば特許文献1は、電動パワーステアリング用の電子制御ユニットの構造を開示する。特許文献1の図3のモータ制御装置200(電子制御ユニット)は、モータ100の側部に、モータ100と一体に形成されている。また、特許文献1の図10は、モータ制御装置200の回路構成を開示し、CFで示された位置にコモンフィルタを配置する代わりに、以下の(1)〜(3)を実施している。
(1)N側バスバ230BNNとPCB制御グラウンド225GS(制御モジュール220に実装)とをN側電源配線225Nで電気的に接続する。
(2)PCB制御グラウンド225GSとPCBパワーグラウンド225GPとをダイオード226Dを介して電気的に接続する。
(3)PCBパワーグラウンド225GPと下アーム側ソース端子LSとをゲート戻り線GPで電気的に接続する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−63242号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
一般に、電動パワーステアリング用の電子制御ユニットは、小型であることが望ましい。また、コモンフィルタは、コイルで構成されて、電子制御ユニットの小型を抑制してしまう。言い換えれば、電動モータと一体に形成される電動パワーステアリング用の電子制御ユニットでは、コイルで構成される大型のコモンフィルタを採用することができない。特許文献1の図10は、モータ100と一体に形成されるモータ制御装置200において、コモンフィルタを採用しないで半導体スイッチング素子SSWからのノイズを対策するものであるが、モータ100等のモータ制御装置200の外部からのノイズを対策するものではない。
【0006】
本発明の1つの目的は、小型の電動パワーステアリング用の電子制御ユニットを提供することである。本発明の他の目的は、以下に例示する態様及び好ましい実施形態、並びに添付の図面を参照することによって、当業者に明らかになるであろう。
【課題を解決するための手段】
【0007】
以下に、本発明の概要を容易に理解するために、本発明に従う態様を例示する。
【0008】
本発明に従う第1の態様は、電動モータと一体に形成される電動パワーステアリング用の電子制御ユニットであって、
外部のバッテリの正極の電位を入力する第1の入力端子及び前記外部のバッテリの負極の電位を入力する第2の入力端子を有する外部コネクタと、
前記電動モータに駆動信号を供給するスイッチング回路、前記駆動信号の元となる電源電圧を平滑する電解コンデンサ、及び前記スイッチング回路を制御する制御回路を有する制御基板と、
前記制御基板を格納するユニットカバーと、
を備え、
前記電解コンデンサの一端は、前記第1の入力端子及び前記スイッチング回路に接続される第1の電位ラインに接続されるとともに、前記電解コンデンサの他端は、前記第2の入力端子及び前記スイッチング回路に接続される第2の電位ラインに接続され、
前記制御基板は、コイル、第1のセラミックコンデンサ、第2のセラミックコンデンサ、第3のセラミックコンデンサ及び第4のセラミックコンデンサを更に有し、
前記コイルは、前記第1の電位ラインに直列に、前記電解コンデンサに対して前記スイッチング回路の側ではなく、前記第1の入力端子の側に設けられ、
前記第1のセラミックコンデンサは、前記ユニットカバーに接続される第3の電位ラインと前記第1の電位ラインとの間に、前記スイッチング回路の前記側ではなく、前記第1の入力端子の前記側に設けられ、
前記第1のセラミックコンデンサの容量よりも小さい容量を有する前記第2のセラミックコンデンサは、前記第3の電位ラインと前記第1の電位ラインとの間に、前記スイッチング回路の前記側ではなく、前記第1の入力端子の前記側に設けられ、
前記第1のセラミックコンデンサの容量と同じ容量を有する前記第3のセラミックコンデンサは、前記第3の電位ラインと前記第2の電位ラインとの間に設けられ、
前記第2のセラミックコンデンサの容量と同じ容量を有する前記第4のセラミックコンデンサは、前記第3の電位ラインと前記第2の電位ラインとの間に設けられることを特徴とする電動パワーステアリング用の電子制御ユニットに関係する。
【0009】
第1のセラミックコンデンサは、第1の電位ライン(外部のバッテリの正極の電位)と第3の電位ライン(ユニットカバーの電位)との間に設けられ、第1のセラミックコンデンサの容量と同じ容量を有する第3のセラミックコンデンサは、第3の電位ラインと第2の電位ライン(外部のバッテリの負極の電位)との間に設けられている。従って、コモンモードノイズが第1の電位ライン及び第2の電位ラインに伝導し、第1の入力端子及び第2の入力端子を介して電子制御ユニットに進入しても、第1のセラミックコンデンサ及び第3のセラミックコンデンサで、コモンモードノイズを除去又は低減することができる。コモンフィルタとしてコイルを採用する必要がないので、小型の電動パワーステアリング用の電子制御ユニットを提供することができる。
【0010】
さらに、第1のセラミックコンデンサの容量よりも小さい容量を有する第2のセラミックコンデンサは、第1の電位ラインと第3の電位ラインとの間に設けられ、第2のセラミックコンデンサの容量と同じ容量を有する第4のセラミックコンデンサは、第3の電位ラインと第2の電位ラインとの間に設けられている。コモンモードノイズが第1のセラミックコンデンサ及び第3のセラミックコンデンサで対処することができる周波数のコモンモードノイズ(低周波側のコモンモードノイズ)だけでなく、その周波数よりも高い周波数コモンモードノイズ(高周波側のコモンモードノイズ)を含む場合がある。このような場合、第2のセラミックコンデンサ及び第4のセラミックコンデンサで、高周波側のコモンモードノイズを除去又は低減することができる。従って、第1〜第4のセラミックコンデンサで、広範囲のコモンモードノイズを除去又は低減することができる。
【0011】
仮に、コモンフィルタとして低周波側のコモンモードノイズに対処するコイルだけでなく、高周波側のコモンモードノイズに対処するコイルも採用する場合、電子制御ユニットの更なる大型化を招いてしまう。
【0012】
第1の態様において、前記第1のセラミックコンデンサ及び前記第3のセラミックコンデンサの容量は、1[μF]〜10[μF]の範囲であってもよく、
前記第2のセラミックコンデンサ及び前記第4のセラミックコンデンサの容量は、1000[pF]〜0.47[μF]の範囲であってもよい。
【0013】
第1のセラミックコンデンサ及び第3のセラミックコンデンサでAM周波数帯のコモンモードノイズ(低周波側のコモンモードノイズ)に対処することができるとともに、第2のセラミックコンデンサ及び第4のセラミックコンデンサでFM周波数帯のコモンモードノイズ(高周波側のコモンモードノイズ)に対処することができる。
【0014】
仮に、コモンフィルタとしてAM周波数帯のコモンモードノイズに対処するコイルだけでなく、FM周波数帯のコモンモードノイズに対処するコイルも採用する場合、電子制御ユニットの更なる大型化を招いてしまう。
【0015】
第1の態様において、前記コイルは、ノーマルフィルタとして機能してもよく、
前記第1のセラミックコンデンサ、前記第2のセラミックコンデンサ、前記第3のセラミックコンデンサ及び前記第4のセラミックコンデンサは、コモンフィルタとして機能してもよい。
【0016】
ノーマルフィルタの前段にコモンフィルタを設ける電動パワーステアリング用の電子制御ユニットにより、広範囲のコモンモードノイズを除去又は低減することができる。
【0017】
当業者は、例示した本発明に従う態様が、本発明の精神を逸脱することなく、さらに変更され得ることを容易に理解できるであろう。
【図面の簡単な説明】
【0018】
【図1】電動パワーステアリング装置の概略構成例を示す。
【図2】本発明に従う電動パワーステアリング用の電子制御ユニットの外観例を示す。
【図3】図2のユニットカバーを含む電子制御ユニットの分解斜視図の1例を示す。
【図4】図3の第1の入力端子及び第2の入力端子側に設けられた第1〜第4のセラミックコンデンサを有する制御基板を表す回路構成図の1例を示す。
【図5】図4のスイッチング回路を制御する制御回路を有する制御基板の機能ブロック図の1例を示す。
【発明を実施するための形態】
【0019】
以下に説明する好ましい実施形態は、本発明を容易に理解するために用いられている。従って、当業者は、本発明が、以下に説明される実施形態によって不当に限定されないことを留意すべきである。
【0020】
図1は、電動パワーステアリング装置10の概略構成例を示す。図1の例において、電動パワーステアリング装置10は、電動パワーステアリング用の電子制御ユニット(制御部とも言う。)42を備える。具体的には、電動パワーステアリング装置10は、車両のステアリングハンドル(例えばステアリングホイール)21から車両の操舵車輪(例えば前輪)29,29に至るステアリング系20に補助トルク(付加トルクとも言う。)を与える補助トルク機構40を備えている。
【0021】
図1の例において、ステアリング系20は、ステアリングハンドル21にステアリングシャフト22(ステアリングコラムとも言う。)及び自在軸継手23,23を介して回転軸24(ピニオン軸、入力軸とも言う。)を連結し、回転軸24にラックアンドピニオン機構25を介してラック軸26を連結し、ラック軸26の両端に左右のボールジョイント52,52、タイロッド27,27及びナックル28,28を介して左右の操舵車輪29,29を連結したものである。ラックアンドピニオン機構25は、回転軸24に有したピニオン31と、ラック軸26に有したラック32とを備える。
【0022】
ステアリング系20によれば、運転者がステアリングハンドル21を操舵することで、その操舵トルクによりラックアンドピニオン機構25を介して、操舵車輪29,29を操舵することができる。
【0023】
図1の例において、補助トルク機構40は、ステアリングハンドル21に加えたステアリング系20の操舵トルクを操舵トルクセンサ41で検出し、この検出信号(トルク信号とも言う。)に基づき電子制御ユニット42で駆動信号を発生し、この駆動信号に基づき操舵トルクに応じた補助トルク(付加トルク)を電動モータ43で発生し、補助トルクを減速機構44(例えばウォームギヤ機構)を介して回転軸24に伝達し、さらに、補助トルクを回転軸24からステアリング系20のラックアンドピニオン機構25に伝達するようにした機構である。
【0024】
補助トルクがステアリング系20に与えられる箇所によって、電動パワーステアリング装置10は、ピニオンアシスト型、ラックアシスト型、コラムアシスト型等に分類することができる。図1の電動パワーステアリング装置10は、ピニオンアシスト型を示しているが、電動パワーステアリング装置10は、ラックアシスト型、コラムアシスト型等に適用してもよい。
【0025】
電動モータ43は、例えばブラシレスモータであり、ブラシレスモータにおけるロータの回転角又は電動モータ43の回転角(回転信号とも言う。)は、電子制御ユニット42によって検出される。ロータは、例えば永久磁石で構成され、電子制御ユニット42は、永久磁石(N極及びS極)の動きを磁気センサで検出することができる。
【0026】
電子制御ユニット42は、例えば、電源回路、モータ電流(実電流)を検出する電流センサ、マイクロプロセッサ、FETブリッジ回路、磁気センサ等によって構成される。電子制御ユニット42は、トルク信号だけでなく、例えば車速信号も入力することができる。車速信号は、図示せぬ車速センサから電子制御ユニット42に供給されてもよく、図示せぬ他の電子制御ユニットから例えばCAN(Controller Area Network)等の車内ネットワークを介して電子制御ユニット42に供給されてもよい。マイクロプロセッサは、トルク信号、車速信号等に基づいて、電動モータ43をベクトル制御することができる。マイクロプロセッサによって制御されるFETブリッジ回路は、例えば、電動モータ43(ブラシレスモータ)に駆動電流(3相交流電流)を通電するスイッチング回路111,FET1,FET2,FET3,FET4,FET5,FET6(図4参照)によって構成される。磁気センサは、例えばホールIC(図5参照)によって構成される。
【0027】
このような電子制御ユニット42は、少なくとも操舵トルク(トルク信号)に基づいて目標電流を設定し、好ましくは、車速センサによって検出された車速(車速信号)及び磁気センサによって検出されたロータの回転角(回転信号)も考慮して、目標電流を設定する。電子制御ユニット42は、電流センサによって検出されたモータ電流(実電流)が目標電流に一致するように、電動モータ43の駆動電流(駆動信号)を制御することができる。
【0028】
B+は、例えば車両に直流電源として設けられるバッテリ60の正極の電位を示し、B−は、そのバッテリ60の負極の電位を示し、負極の電位B−は、車両の車体に接地することができる。なお、電子制御ユニット42は、外部コネクタ440(図2参照)を備え、外部コネクタ440は、バッテリ60からの電力を電子制御ユニット42に供給することができ、電源電圧(正極の電位B+と負極の電位B−との差)は、電動モータ43の駆動信号の元となる。
【0029】
電動パワーステアリング装置10によれば、運転者の操舵トルクに電動モータ43の補助トルク(付加トルク)を加えた複合トルクにより、ラック軸26で操舵車輪29,29を操舵することができる。
【0030】
図2は、本発明に従う電動パワーステアリング用の電子制御ユニットの外観例を示す。図2の例において、ユニットカバー420は、図1の電子制御ユニット42のカバーであり、モータカバー430は、図1の電動モータ43のカバーである。電動モータ43のモータ軸450の方向にユニットカバー420が配置されるように、電子制御ユニット42は、電動モータ430と一体に形成される。図2の例において、方向DR1が電動モータ43の上を指す場合、電子制御ユニット42は、電動モータ43の上部に電動モータ43と一体に形成することができる。なお、外部コネクタ440は、モータ軸450の方向(方向DR1)に突き出し、外部のバッテリ60の正極の電位を入力する第1の入力端子B+及び外部のバッテリ60の負極の電位を入力する第2の入力端子B−を有するとともに、操舵トルクセンサ41等と電子制御ユニット42とを接続する少なくとも1つの端子460(図3参照)を有している。なお、電子制御ユニット42は、例えば特許文献1と同様に、電動モータ43の側部に電動モータ43と一体に形成してもよい。
【0031】
図3は、図2のユニットカバー420を含む電子制御ユニット42の分解斜視図の1例を示す。図3の例において、電動パワーステアリング用の電子制御ユニット42は、例えば2つの基板200,300からなる制御基板を備えるとともに、制御基板を格納するユニットカバー420を備える。なお、制御基板は、2つの基板200,300で概念的に示されており、正確な形状が示されているものではない。また、制御基板は、図3の例に限定されず。例えば1つの基板又は3つの基板で構成してもよい。制御基板又は例えば基板200は、電動モータ43に駆動信号を供給するスイッチング回路110(図4参照)を有する。制御基板又は例えば基板200は、駆動信号の元となる電源電圧を平滑する電解コンデンサ210を有する。制御基板又は例えば基板300は、スイッチング回路110を制御する制御回路(図5参照)を有する。
【0032】
図3の例において、外部コネクタ440は、少なくとも1つの雄ネジ490を介してユニットカバー420に固定することができる。制御基板を構成する基板200,300を格納可能なユニットカバー420の開口部425は、モータカバー430によって閉じられている(図2参照)。なお、開口部425は、ユニットカバー420の頂部の開口であり、開口部426は、ユニットカバー420の側部の開口であり、開口部426は、板状の蓋428及び雄ネジ429によって閉じられている(図2参照)。板状の蓋428は、電動モータ43への出力端子U,V,W(図4参照)を覆うことができる。
【0033】
図4は、図3の第1の入力端子B+及び第2の入力端子B−側に設けられた第1〜第4のセラミックコンデンサC1〜C4を有する基板200又は制御基板を表す回路構成図の1例を示す。図4の例において、第1の入力端子B+は、バッテリ60の正極と接続される端子であり、第2の入力端子B−は、そのバッテリ60の負極(車体GND)と接続される端子である。基板200又は制御基板は、外部コネクタ440の第1の入力端子B+及び第2の入力端子B−と接続されている。
【0034】
図4の例において、第1の入力端子B+に接続される第1の電位ライン、第2の入力端子B−に接続される第2の電位ライン、及びユニットカバー420に接続される第3の電位ラインが示されている。ユニットカバー420は、例えば金属で構成され、基板200又は制御基板は、ユニットカバー420(第3の電位CASE)と接続されている。電源電圧(正極の電位B+と負極の電位B−との差)を平滑する電解コンデンサ210の一端は、第1の電位ライン(B+)に接続されるとともに、電解コンデンサ210の他端は、第2の入力端子(B−)に接続されている。
【0035】
図4の例において、電動モータ43に駆動信号を供給するスイッチング回路111は、6つのFET1〜FET6から構成される3相FETブリッジ回路FET1〜FET6であり、第1の電位ライン(B+)及び第2の電位ライン(B−)に対して、電解コンデンサ210と並列に接続されている。第1の電位ライン(B+)は、第1の入力端子B+及びスイッチング回路111に接続され、第2の電位ライン(B−)は、第2の入力端子B−及びスイッチング回路111に接続される。なお、スイッチング回路111は、FET以外の複数のスイッチングトランジスタ(例えばIGBT)で構成してもよい。
【0036】
基板200又は制御基板は、ノイズフィルタとしてコイル220を有することができる。コイル220は、第1の電位ライン(B+)に直列に、電解コンデンサ210に対してスイッチング回路110の側ではなく、第1の入力端子B+の側に設けられている。コイル220は、ノーマルノイズを除去又は低減することができ、ノーマルフィルタとして機能する。
【0037】
基板200又は制御基板は、コモンフィルタとして機能する第1〜第4のセラミックコンデンサC1,C2,C3,C4を更に有する。第1のセラミックコンデンサC1は、第1の電位ライン(B+)と第3の電位ライン(ユニットカバー420の電位CASE)との間に、電解コンデンサ210に対してスイッチング回路110の側ではなく、第1の入力端子B+の側に設けられる。第1のセラミックコンデンサC1の容量と同じ容量を有する第3のセラミックコンデンサC3は、第3の電位ライン(CASE)と第2の電位ライン(B−)との間に設けられる。従って、コモンモードノイズが第1の電位ライン(B+)及び第2の電位ライン(B−)に伝導し、第1の入力端子B+及び第2の入力端子B−を介して電子制御ユニット42に進入しても、第1のセラミックコンデンサC1及び第3のセラミックコンデンサC3で、コモンモードノイズを除去又は低減することができる。基板200又は制御基板は、コモンフィルタとしてコイルを採用する必要がないので、小型の電子制御ユニット420を提供することができる。
【0038】
さらに、第1のセラミックコンデンサC1の容量よりも小さい容量を有する第2のセラミックコンデンサC2は、第1の電位ライン(B+)と第3の電位ライン(CASE)との間に、電解コンデンサ210に対してスイッチング回路110の側ではなく、第1の入力端子B+の側に設けられる。第2のセラミックコンデンサC2の容量と同じ容量を有する第4のセラミックコンデンサC4は、第3の電位ライン(CASE)と第2の電位ライン(B−)との間に設けられている。
【0039】
第1〜第4のセラミックコンデンサC1,C2,C3,C4は、スイッチング回路110の前段に設けることができ、第1のセラミックコンデンサC1及び第2のセラミックコンデンサC2は、コイル220の前段に設けることができる。第1のセラミックコンデンサC1及び第3のセラミックコンデンサC3の容量は、例えば1[μF]〜10[μF]の範囲に設定されており、第2のセラミックコンデンサC2及び第4のセラミックコンデンサC2の容量は、例えば1000[pF]〜0.47[μF]の範囲に設定されている。
【0040】
コモンモードノイズが第1のセラミックコンデンサ及び第3のセラミックコンデンサで対処することができる例えばAM周波数帯の周波数のコモンモードノイズ(低周波側のコモンモードノイズ)だけでなく、その周波数よりも高い例えばFM周波数帯の周波数コモンモードノイズ(高周波側のコモンモードノイズ)を含む場合がある。このような場合、第2のセラミックコンデンサC2及び第4のセラミックコンデンサC4で、高周波側のコモンモードノイズを除去又は低減することができる。従って、第1〜第4のセラミックコンデンサC1,C2,C3,C4で、広範囲のコモンモードノイズを除去又は低減することができる。
【0041】
仮に、基板200又は制御基板がコモンフィルタとしてAM周波数帯のコモンモードノイズに対処するコイルだけでなく、FM周波数帯のコモンモードノイズに対処するコイルも採用する場合、電子制御ユニットの更なる大型化を招いてしまう。
【0042】
加えて、第1〜第4のセラミックコンデンサC1,C2,C3,C4は、電動モータ430と一体に形成される電子制御ユニット42内に設置されるので、第1〜第4のセラミックコンデンサC1,C2,C3,C4と電動モータ430とを近づけることができる。従って、第1〜第4のセラミックコンデンサC1,C2,C3,C4は、電動モータ430に起因するコモンモードノイズを効果的に除去又は低減することができる。
【0043】
スイッチング回路111のFET1及びFET2は、正極の電位B+と負極の電位B−との間に直列に接続され、電動モータ43の例えばU巻線を流れるU相電流を生成することができる。U相電流を検出するための電流センサとして例えばシャント抵抗R1をFET2と負極の電位B−との間に設けることができ、U相電流を遮断可能な半導体リレーとして例えばFET7をFET1とFET2との接続ノードと電動モータ43への出力端子Uとの間に設けることができる。
【0044】
FET3及びFET4は、正極の電位B+と負極の電位B−との間に直列に接続され、電動モータ43の例えばV巻線を流れるV相電流を生成することができる。V相電流を検出するための電流センサとして例えばシャント抵抗R2をFET4と負極の電位B−との間に設けることができ、V相電流を遮断可能な半導体リレーとして例えばFET8をFET3とFET4との接続ノードと電動モータ43への出力端子Vとの間に設けることができる。
【0045】
FET5及びFET6は、正極の電位B+と負極の電位B−との間に直列に接続され、電動モータ43の例えばW巻線を流れるW相電流を生成することができる。W相電流を検出するための電流センサとして例えばシャント抵抗R3をFET6と負極の電位B−との間に設けることができ、W相電流を遮断可能な半導体リレーとして例えばFET9をFET5とFET6との接続ノードと電動モータ43への出力端子Wとの間に設けることができる。
【0046】
図4の例において、スイッチング回路110は、駆動信号としてU相電流、V相電流及びW相電流を電動モータ43に供給することができる。FET1、FET3及びFET5は、バッテリ60からの電力を遮断可能な半導体リレーとして例えばFET10及びFET11を介して、正極の電位B+に接続されている。FET1〜FET11の各々は、駆動回路(図5参照)と接続される図示せぬゲートを有し、オン又はオフされる。
【0047】
なお、FET2とシャント抵抗R1との接続ノード、FET4とシャント抵抗R2との接続ノード及びFET6とシャント抵抗R3との接続ノードは、入力回路を介してマイクロプロセッサ(図5参照)に接続され、これらの接続ノードの電位からU相電流、V相電流及びW相電流を求めることができる。
【0048】
図5は、図4のスイッチング回路110を制御する制御回路を有する基板300又は制御基板の機能ブロック図の1例を示す。図5の例において、制御回路は、マイクロプロセッサ及び駆動回路で構成され、基板300又は制御基板は、磁気センサとしてのホールICだけでなく、制御回路、入力回路及び電源回路も有することができる。
【0049】
制御回路は、少なくともスイッチング回路110(FET1〜FET6)を制御し、マイクロプロセッサは、目標電流を設定することができる。目標電流は、入力回路を介して取り込まれるトルク信号及びモータ電流(実電流)、並びにホールICを介して取り込まれる回転信号等によって設定される。駆動回路は、目標電流に基づいて、FET1〜FET6に対応する6つの制御信号(ゲート信号)を生成する。FET1〜FET6は、6つの制御信号(ゲート信号)によってオン又はオフされ、これにより、電動モータ43に駆動信号(駆動電流)が供給される。
【0050】
制御回路は、半導体リレー(FET7〜FET11)を制御することもできる。この場合、マイクロプロセッサは、FET7〜FET11の各々のオン又はオフを決定し、駆動回路は、これらの決定に基づいて、FET7〜FET11に対応する5つの制御信号(ゲート信号)を生成することができる。電源回路は、図4のスイッチング回路110と同様に、第1〜第4のセラミックコンデンサC1,C2,C3,C4の後段又は電解コンデンサ210の後段に設けれ、第1の電位ライン(B+)及び第2の電位ライン(B−)に接続され、ホールIC、入力回路、マイクロプロセッサ及び駆動回路の電源を生成することができる。言い換えれば、電源回路はバッテリ60の電源電圧(正極の電位B+と負極の電位B−との差)をロジックの電源電圧(電位Vと電位GNDとの差)に変換することができる。
【0051】
本発明は、上述の例示的な実施形態に限定されず、また、当業者は、上述の例示的な実施形態を特許請求の範囲に含まれる範囲まで、容易に変更することができるであろう。
【符号の説明】
【0052】
10・・・電動パワーステアリング装置、20・・・ステアリング系、21・・・ステアリングハンドル、22・・・ステアリングシャフト、23・・・自在軸継手、24・・・回転軸、25・・・ラックアンドピニオン機構、26・・・ラック軸、27・・・タイロッド、28・・・ナックル、29・・・操舵車輪、31・・・ピニオン、32・・・ラック、40・・・補助トルク機構、41・・・操舵トルクセンサ、42・・・電子制御ユニット(制御部)、43・・・電動モータ、44・・・減速機構、52・・・ボールジョイント、60・・・バッテリ、110・・・スイッチング回路、200,300・・・基板(制御基板)、210・・・電解コンデンサ、220・・・コイル、420・・・ユニットカバー、425,426・・・開口部、428・・・蓋、429・・・雄ネジ、430・・・モータカバー、440・・・外部コネクタ、450・・・モータ軸、460・・・端子、490・・・雄ネジ、C1,C2,C3,C4・・・セラミックコンデンサ。
【特許請求の範囲】
【請求項1】
電動モータと一体に形成される電動パワーステアリング用の電子制御ユニットであって、
外部のバッテリの正極の電位を入力する第1の入力端子及び前記外部のバッテリの負極の電位を入力する第2の入力端子を有する外部コネクタと、
前記電動モータに駆動信号を供給するスイッチング回路、前記駆動信号の元となる電源電圧を平滑する電解コンデンサ、及び前記スイッチング回路を制御する制御回路を有する制御基板と、
前記制御基板を格納するユニットカバーと、
を備え、
前記電解コンデンサの一端は、前記第1の入力端子及び前記スイッチング回路に接続される第1の電位ラインに接続されるとともに、前記電解コンデンサの他端は、前記第2の入力端子及び前記スイッチング回路に接続される第2の電位ラインに接続され、
前記制御基板は、コイル、第1のセラミックコンデンサ、第2のセラミックコンデンサ、第3のセラミックコンデンサ及び第4のセラミックコンデンサを更に有し、
前記コイルは、前記第1の電位ラインに直列に、前記電解コンデンサに対して前記スイッチング回路の側ではなく、前記第1の入力端子の側に設けられ、
前記第1のセラミックコンデンサは、前記ユニットカバーに接続される第3の電位ラインと前記第1の電位ラインとの間に、前記スイッチング回路の前記側ではなく、前記第1の入力端子の前記側に設けられ、
前記第1のセラミックコンデンサの容量よりも小さい容量を有する前記第2のセラミックコンデンサは、前記第3の電位ラインと前記第1の電位ラインとの間に、前記スイッチング回路の前記側ではなく、前記第1の入力端子の前記側に設けられ、
前記第1のセラミックコンデンサの容量と同じ容量を有する前記第3のセラミックコンデンサは、前記第3の電位ラインと前記第2の電位ラインとの間に設けられ、
前記第2のセラミックコンデンサの容量と同じ容量を有する前記第4のセラミックコンデンサは、前記第3の電位ラインと前記第2の電位ラインとの間に設けられることを特徴とする電動パワーステアリング用の電子制御ユニット。
【請求項2】
前記第1のセラミックコンデンサ及び前記第3のセラミックコンデンサの容量は、1[μF]〜10[μF]の範囲であり、
前記第2のセラミックコンデンサ及び前記第4のセラミックコンデンサの容量は、1000[pF]〜0.47[μF]の範囲であり、
することを特徴とする請求項1に記載の電動パワーステアリング用の電子制御ユニット。
【請求項3】
前記コイルは、ノーマルフィルタとして機能し、
前記第1のセラミックコンデンサ、前記第2のセラミックコンデンサ、前記第3のセラミックコンデンサ及び前記第4のセラミックコンデンサは、コモンフィルタとして機能する請求項1又は2に記載の電動パワーステアリング用の電子制御ユニット。
【請求項1】
電動モータと一体に形成される電動パワーステアリング用の電子制御ユニットであって、
外部のバッテリの正極の電位を入力する第1の入力端子及び前記外部のバッテリの負極の電位を入力する第2の入力端子を有する外部コネクタと、
前記電動モータに駆動信号を供給するスイッチング回路、前記駆動信号の元となる電源電圧を平滑する電解コンデンサ、及び前記スイッチング回路を制御する制御回路を有する制御基板と、
前記制御基板を格納するユニットカバーと、
を備え、
前記電解コンデンサの一端は、前記第1の入力端子及び前記スイッチング回路に接続される第1の電位ラインに接続されるとともに、前記電解コンデンサの他端は、前記第2の入力端子及び前記スイッチング回路に接続される第2の電位ラインに接続され、
前記制御基板は、コイル、第1のセラミックコンデンサ、第2のセラミックコンデンサ、第3のセラミックコンデンサ及び第4のセラミックコンデンサを更に有し、
前記コイルは、前記第1の電位ラインに直列に、前記電解コンデンサに対して前記スイッチング回路の側ではなく、前記第1の入力端子の側に設けられ、
前記第1のセラミックコンデンサは、前記ユニットカバーに接続される第3の電位ラインと前記第1の電位ラインとの間に、前記スイッチング回路の前記側ではなく、前記第1の入力端子の前記側に設けられ、
前記第1のセラミックコンデンサの容量よりも小さい容量を有する前記第2のセラミックコンデンサは、前記第3の電位ラインと前記第1の電位ラインとの間に、前記スイッチング回路の前記側ではなく、前記第1の入力端子の前記側に設けられ、
前記第1のセラミックコンデンサの容量と同じ容量を有する前記第3のセラミックコンデンサは、前記第3の電位ラインと前記第2の電位ラインとの間に設けられ、
前記第2のセラミックコンデンサの容量と同じ容量を有する前記第4のセラミックコンデンサは、前記第3の電位ラインと前記第2の電位ラインとの間に設けられることを特徴とする電動パワーステアリング用の電子制御ユニット。
【請求項2】
前記第1のセラミックコンデンサ及び前記第3のセラミックコンデンサの容量は、1[μF]〜10[μF]の範囲であり、
前記第2のセラミックコンデンサ及び前記第4のセラミックコンデンサの容量は、1000[pF]〜0.47[μF]の範囲であり、
することを特徴とする請求項1に記載の電動パワーステアリング用の電子制御ユニット。
【請求項3】
前記コイルは、ノーマルフィルタとして機能し、
前記第1のセラミックコンデンサ、前記第2のセラミックコンデンサ、前記第3のセラミックコンデンサ及び前記第4のセラミックコンデンサは、コモンフィルタとして機能する請求項1又は2に記載の電動パワーステアリング用の電子制御ユニット。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−103529(P2013−103529A)
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願番号】特願2011−246709(P2011−246709)
【出願日】平成23年11月10日(2011.11.10)
【出願人】(300052246)株式会社ホンダエレシス (105)
【Fターム(参考)】
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願日】平成23年11月10日(2011.11.10)
【出願人】(300052246)株式会社ホンダエレシス (105)
【Fターム(参考)】
[ Back to top ]