
電動パワーステアリング用の電子制御ユニット
【課題】 小型の電動パワーステアリング用の電子制御ユニットを提供する。
【解決手段】 電動モータ43と一体に形成される電動パワーステアリング用の電子制御ユニット43は、電動モータ43に駆動信号を供給するスイッチング回路110を有する第1の基板100と駆動信号の元となる電源電圧を平滑する電解コンデンサ210を有する第2の基板200とスイッチング回路100を制御する制御回路を有する第3の基板300と第1の基板100、第2の基板200及び第3の基板300を格納するユニットカバー420とを備える。ユニットカバー420の開口部425は、電動モータ43を格納するモータカバー430によって閉じられ、第1の基板100、第2の基板200、第3の基板300及びモータカバー430は、電動モータ43のモータ軸450の方向DR1にモータカバー430第3の基板300第2の基板200及び第1の基板100の順で配置される。
【解決手段】 電動モータ43と一体に形成される電動パワーステアリング用の電子制御ユニット43は、電動モータ43に駆動信号を供給するスイッチング回路110を有する第1の基板100と駆動信号の元となる電源電圧を平滑する電解コンデンサ210を有する第2の基板200とスイッチング回路100を制御する制御回路を有する第3の基板300と第1の基板100、第2の基板200及び第3の基板300を格納するユニットカバー420とを備える。ユニットカバー420の開口部425は、電動モータ43を格納するモータカバー430によって閉じられ、第1の基板100、第2の基板200、第3の基板300及びモータカバー430は、電動モータ43のモータ軸450の方向DR1にモータカバー430第3の基板300第2の基板200及び第1の基板100の順で配置される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電動パワーステアリング用の電子制御ユニット等に関する。
【背景技術】
【0002】
自動車等の車両は、電動パワーステアリング装置を備えることができ、電動パワーステアリング装置は、ステアリングハンドルへの運転者による操作によって生じるステアリング系での操舵トルクを補助する補助トルクを発生させる。補助トルクの発生により、電動パワーステアリング装置は、運転者の負担を軽減することができる。補助トルクを与える補助トルク機構は、ステアリング系の操舵トルクを操舵トルクセンサで検出し、この検出信号に基づき電子制御ユニットで駆動信号を発生し、この駆動信号に基づき操舵トルクに応じた補助トルクを電動モータで発生し、補助トルクを減速機構を介してステアリング系に伝達する。
【0003】
例えば特許文献1は、電動パワーステアリング用の電子制御ユニットの構造を開示する。特許文献1の図3のモータ制御装置200(電子制御ユニット)は、モータ100の側部に、モータ100と一体に形成されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−63242号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
一般に、電動パワーステアリング用の電子制御ユニットは、小型であることが望ましい。しかしながら、小型の電動パワーステアリング用の電子制御ユニットを設計することは、当業者にとって困難である。
【0006】
本発明の1つの目的は、小型の電動パワーステアリング用の電子制御ユニットを提供することである。本発明の他の目的は、以下に例示する態様及び好ましい実施形態、並びに添付の図面を参照することによって、当業者に明らかになるであろう。
【課題を解決するための手段】
【0007】
以下に、本発明の概要を容易に理解するために、本発明に従う態様を例示する。
【0008】
本発明に従う第1の態様は、電動モータと一体に形成される電動パワーステアリング用の電子制御ユニットであって、
前記電動モータに駆動信号を供給するスイッチング回路を有する第1の基板と、
前記駆動信号の元となる電源電圧を平滑する電解コンデンサを有する第2の基板と、
前記スイッチング回路を制御する制御回路を有する第3の基板と、
前記第1の基板、前記第2の基板及び前記第3の基板を格納するユニットカバーと、
を備え、
前記ユニットカバーの開口部は、前記電動モータを格納するモータカバーによって閉じられ、
前記第1の基板、前記第2の基板、前記第3の基板及び前記モータカバーは、前記電動モータのモータ軸の方向に、前記モータカバー、前記第3の基板、前記第2の基板及び前記第1の基板の順で配置されることを特徴とする電動パワーステアリング用の電子制御ユニットに関係する。
【0009】
ユニットカバーの開口部は、電動モータを格納するモータカバーによって閉じられているので、電子制御ユニットは、独立した部品である蓋(例えば特許文献1の図1の金属筐体240)を備える必要がない。電子制御ユニットを構成する部品の数を減少することにより、小型の電動パワーステアリング用の電子制御ユニットを提供することができる。
【0010】
さらに、第1の基板、第2の基板、第3の基板及びモータカバーは、電動モータのモータ軸の方向に、モータカバー、第3の基板、第2の基板及び第1の基板の順で配置される。これにより、電子制御ユニットは、電動モータの上部又は下部に、電動モータと一体に形成することができる。スイッチング回路を電解コンデンサに対して上方又は下方に配置することができ、電子制御ユニットの出っ張りを抑制し、小型の電動パワーステアリング用の電子制御ユニットを提供することができる。従って、電子制御ユニット及び電動モータを電動パワーステアリング装置に組み込む際、配置又は設計の自由度が高い。
【0011】
なお、特許文献1の図2において、モータ制御装置200(電子制御ユニット)は、モータ100の側部に、モータ100と一体に形成され、モータ制御装置200自身が全体として出っ張りを形成する。従って、モータ制御装置200及びモータ100を電動パワーステアリング装置に組み込む際、配置又は設計の自由度が制限されてしまう。さらに、特許文献1の図1、図5及び図11において、DCモジュール230又は電解コンデンサC2,C3は、パワーモジュール210に対して左又は右に配置され、DCモジュール230又は電解コンデンサC2,C3は、モータ制御装置200の出っ張り又は大型化を招いてしまう。
【0012】
第1の態様において、前記第3の基板は、前記電動モータの回転角を検出する磁気センサを有してもよい。
【0013】
磁気センサを電動モータに近づけることができ、言い換えれば、磁気センサは、第1の基板及び第2の基板を介さないで、電動モータと対向することが可能となり、小型の電動パワーステアリング用の電子制御ユニットを提供することができる。
【0014】
仮に、磁気センサが第1の基板及び第2の基板を介して電動モータと対向する場合、電動モータの回転角を検出するために、第1の基板及び第2の基板に孔を形成する必要がある。この孔により、第1の基板及び第2の基板の面積は大きくなり、電子制御ユニットの小型化を抑制してしまう。
【0015】
第1の態様において、前記スイッチング回路は、複数のスイッチングトランジスタを有してもよく、
前記制御回路から前記複数のスイッチングトランジスタに送られる複数の制御信号を運ぶ複数の信号線は、1つの列に並んで前記第1の基板に接続されてもよく、
前記複数のスイッチングトランジスタは、前記1つの列によって振り分けられて配置されてもよい。
【0016】
複数のスイッチングトランジスタと1つの列(複数の信号線)との距離を短くすることができ、第1の基板の面積を小さくすることができる。従って、小型の電動パワーステアリング用の電子制御ユニットを提供することができる。
【0017】
なお、特許文献1の図1のリードフレームSLFは、パワーモジュール210の基板の辺部に接続され、特許文献1の図9に示されるように、スイッチング素子SSWとリードフレームSLFとを接続するパワーモジュール210の基板上の配線パターンの経路又は面積が大きく、パワーモジュール210全体も大きくなってしまう。
【0018】
第1の態様において、前記複数の信号線は、前記電解コンデンサを迂回して前記第2の基板を貫通し、1つの列に並んで前記第3の基板の辺部に接続されてもよい。
【0019】
第1の基板と第3の基板との間の空間を有効に利用して複数の信号線を配置することにより、小型の電動パワーステアリング用の電子制御ユニットを提供することができる。
【0020】
第1の態様において、前記第1の基板及び前記第2の基板は、雄ネジ部及び雌ネジ部で共締めされてもよく、
前記雌ネジ部は、前記ユニットカバーに設けられてもよく、
前記雄ネジ部は、前記第1の基板と前記第2の基板とを位置決めする管を貫通して前記雌ネジ部と連結してもよい。
【0021】
雄ネジ部及びユニットカバーは、第1の基板及び第2の基板を挟み込むことができ、小型の電動パワーステアリング用の電子制御ユニットを提供することができる。仮に、第1の基板及び第2の基板だけを独立して固定し、さらに、第1の基板及びユニットカバーだけを独立して固定すると、雄ネジ部及び雌ネジ部を構成する部品の数が増加してしまう。
【0022】
当業者は、例示した本発明に従う態様が、本発明の精神を逸脱することなく、さらに変更され得ることを容易に理解できるであろう。
【図面の簡単な説明】
【0023】
【図1】電動パワーステアリング装置の概略構成例を示す。
【図2】本発明に従う電動パワーステアリング用の電子制御ユニットの外観例を示す。
【図3】図2のユニットカバーを含む電子制御ユニットの分解斜視図の1例を示す。
【図4】図3のスイッチング回路と電解コンデンサとの接続関係を表す回路構成図の1例を示す。
【図5】図3の第3の基板の機能ブロック図の1例を示す。
【図6】図6(A)は、図3の第1の基板の平面図を示し、図6(B)は、中継部材が取り付けられた第1の基板の平面図を示し、図6(C)は、図3の中継部材の平面図を示し、図6(D)は、図3の骨格を省略した中継部材の平面図を示す。
【図7】図7(A)は、図3の第1の基板、複数の信号線、電解コンデンサ及び第3の基板の配置説明図を示し、図7(B)は、図3の第2の基板のバスバー、電解コンデンサ及びコイルの配置説明図を示し、図7(C)は、図3の第1の基板、中継部材、管292、第2の基板及び雄ネジの配置説明図を示す。
【発明を実施するための形態】
【0024】
以下に説明する好ましい実施形態は、本発明を容易に理解するために用いられている。従って、当業者は、本発明が、以下に説明される実施形態によって不当に限定されないことを留意すべきである。
【0025】
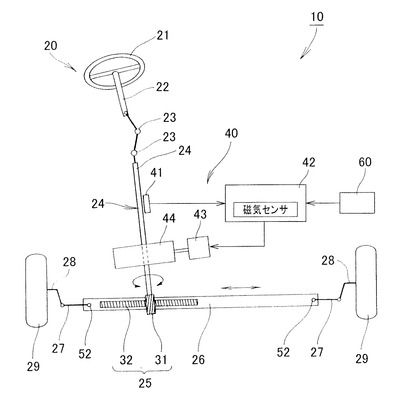
図1は、電動パワーステアリング装置10の概略構成例を示す。図1の例において、電動パワーステアリング装置10は、電動パワーステアリング用の電子制御ユニット(制御部とも言う。)42を備える。具体的には、電動パワーステアリング装置10は、車両のステアリングハンドル(例えばステアリングホイール)21から車両の操舵車輪(例えば前輪)29,29に至るステアリング系20に補助トルク(付加トルクとも言う。)を与える補助トルク機構40を備えている。
【0026】
図1の例において、ステアリング系20は、ステアリングハンドル21にステアリングシャフト22(ステアリングコラムとも言う。)及び自在軸継手23,23を介して回転軸24(ピニオン軸、入力軸とも言う。)を連結し、回転軸24にラックアンドピニオン機構25を介してラック軸26を連結し、ラック軸26の両端に左右のボールジョイント52,52、タイロッド27,27及びナックル28,28を介して左右の操舵車輪29,29を連結したものである。ラックアンドピニオン機構25は、回転軸24に有したピニオン31と、ラック軸26に有したラック32とを備える。
【0027】
ステアリング系20によれば、運転者がステアリングハンドル21を操舵することで、その操舵トルクによりラックアンドピニオン機構25を介して、操舵車輪29,29を操舵することができる。
【0028】
図1の例において、補助トルク機構40は、ステアリングハンドル21に加えたステアリング系20の操舵トルクを操舵トルクセンサ41で検出し、この検出信号(トルク信号とも言う。)に基づき電子制御ユニット42で駆動信号を発生し、この駆動信号に基づき操舵トルクに応じた補助トルク(付加トルク)を電動モータ43で発生し、補助トルクを減速機構44(例えばウォームギヤ機構)を介して回転軸24に伝達し、さらに、補助トルクを回転軸24からステアリング系20のラックアンドピニオン機構25に伝達するようにした機構である。
【0029】
補助トルクがステアリング系20に与えられる箇所によって、電動パワーステアリング装置10は、ピニオンアシスト型、ラックアシスト型、コラムアシスト型等に分類することができる。図1の電動パワーステアリング装置10は、ピニオンアシスト型を示しているが、電動パワーステアリング装置10は、ラックアシスト型、コラムアシスト型等に適用してもよい。
【0030】
電動モータ43は、例えばブラシレスモータであり、ブラシレスモータにおけるロータの回転角又は電動モータ43の回転角(回転信号とも言う。)は、電子制御ユニット42によって検出される。ロータは、例えば永久磁石で構成され、電子制御ユニット42は、永久磁石(N極及びS極)の動きを磁気センサで検出することができる。
【0031】
電子制御ユニット42は、例えば、電源回路、モータ電流(実電流)を検出する電流センサ、マイクロプロセッサ、FETブリッジ回路、磁気センサ等によって構成される。電子制御ユニット42は、トルク信号だけでなく、例えば車速信号も入力することができる。外部機器60は、例えば車速センサであるが、例えばCAN(Controller Area Network)等の車内ネットワークで通信可能な他の電子制御ユニットでもよい。マイクロプロセッサは、トルク信号、車速信号等に基づいて、電動モータ43をベクトル制御することができる。マイクロプロセッサによって制御されるFETブリッジ回路は、例えば、電動モータ43(ブラシレスモータ)に駆動電流(3相交流電流)を通電するスイッチング回路111,FET1,FET2,FET3,FET4,FET5,FET6(図4参照)によって構成される。磁気センサは、例えばホールIC310(図3参照)によって構成される。
【0032】
このような電子制御ユニット42は、少なくとも操舵トルク(トルク信号)に基づいて目標電流を設定し、好ましくは、車速センサによって検出された車速(車速信号)及び磁気センサによって検出されたロータの回転角(回転信号)も考慮して、目標電流を設定する。電子制御ユニット42は、電流センサによって検出されたモータ電流(実電流)が目標電流に一致するように、電動モータ43の駆動電流(駆動信号)を制御することができる。
【0033】
電動パワーステアリング装置10によれば、運転者の操舵トルクに電動モータ43の補助トルク(付加トルク)を加えた複合トルクにより、ラック軸26で操舵車輪29,29を操舵することができる。
【0034】
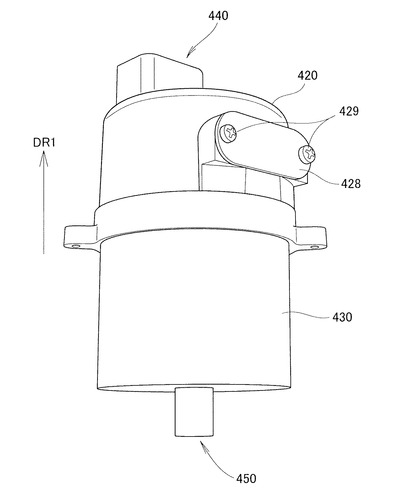
図2は、本発明に従う電動パワーステアリング用の電子制御ユニットの外観例を示す。図2の例において、ユニットカバー420は、図1の電子制御ユニット42のカバーであり、モータカバー430は、図1の電動モータ43のカバーである。電動モータ43のモータ軸450の方向にユニットカバー420が配置されるように、電子制御ユニット42は、電動モータ430と一体に形成される。図2の例において、方向DR1が電動モータ43の上を指す場合、電子制御ユニット42は、電動モータ43の上部に電動モータ43と一体に形成することができる。なお、外部コネクタ440は、モータ軸450の方向(方向DR1)に突き出し、操舵トルクセンサ41等と電子制御ユニット42とを接続する少なくとも1つの端子460(図3参照)を有している。
【0035】
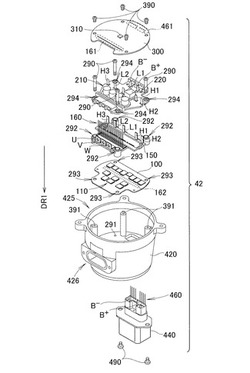
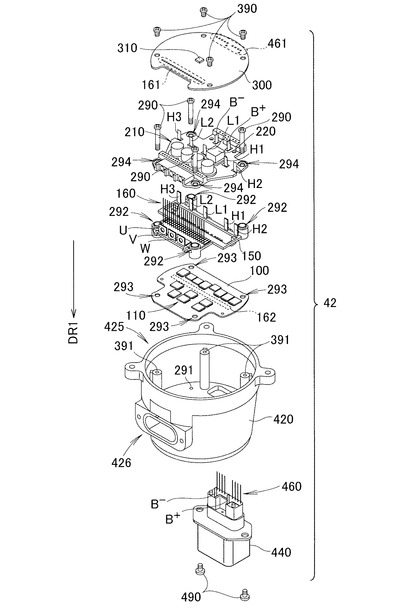
図3は、図2のユニットカバー420を含む電子制御ユニット42の分解斜視図の1例を示す。図3の例において、電動パワーステアリング用の電子制御ユニット42は、第1の基板100、第2の基板200、第3の基板300及びユニットカバー420を備える。第1の基板100は、電動モータ43に駆動信号を供給するスイッチング回路110を有する。第2の基板200は、駆動信号の元となる電源電圧を平滑する少なくとも1つの電解コンデンサ210を有する。第3の基板300は、スイッチング回路110を制御する制御回路(図5参照)を有する。ユニットカバー420は、第1の基板100、第2の基板200及び第3の基板300を格納することができる。ユニットカバー420の開口部425は、モータカバー430によって閉じられている(図2参照)。なお、開口部425は、ユニットカバー420の頂部の開口であり、開口部426は、ユニットカバー420の側部の開口であり、開口部426は、板状の蓋428及び雄ネジ429によって閉じられている(図2参照)。
【0036】
ユニットカバー420の開口部425は、モータカバー430によって閉じられているので、電子制御ユニット42は、独立した部品である蓋(例えば特許文献1の図1の金属筐体240)を備える必要がない。電子制御ユニット42を構成する部品の数を減少することにより、小型の電動パワーステアリング用の電子制御ユニット42を提供することができる。なお、ユニットカバー420の開口部426は、例えば特許文献1の図1のカバー250Mに対応する。
【0037】
なお、特許文献1の図2において、モータ制御装置200(電子制御ユニット)は、モータ100の側部に、モータ100と一体に形成され、モータ制御装置200自身が全体として出っ張りを形成する。従って、モータ制御装置200及びモータ100を電動パワーステアリング装置に組み込む際、配置又は設計の自由度が制限されてしまう。さらに、特許文献1の図1、図5及び図11において、DCモジュール230又は電解コンデンサC2,C3は、パワーモジュール210に対して左又は右に配置され、DCモジュール230又は電解コンデンサC2,C3は、モータ制御装置200の出っ張り又は大型化を招いてしまう。
【0038】
電子制御ユニット42を示す図3及びモータカバー430を示す図2を参照すれば、第1の基板100、第2の基板200、第3の基板300及びモータカバー430は、電動モータ43のモータ軸450の方向(方向DR1)に、モータカバー430、第3の基板300、第2の基板200及び第1の基板100の順で配置される。方向DR1が上方を指す場合、スイッチング回路110を少なくとも1つの電解コンデンサ210に対して上方に配置することができ、電子制御ユニット42の出っ張りを抑制し、小型の電子制御ユニット42を提供することができる。従って、電子制御ユニット42及び電動モータ43を電動パワーステアリング装置10又は減速機構44に組み込む際、配置又は設計の自由度が高い。
【0039】
なお、図3の例において、外部コネクタ440は、少なくとも1つの雄ネジ490を介してユニットカバー420に固定することができる。また、中継部材150は、スイッチング回路110を制御する複数の制御信号を運ぶ複数の信号線160を有し、中継部材150が第1の基板100に取り付けられた状態で、複数の信号線160は、第1の基板100の接続領域162に例えば半田で接続されて固定することができる。管292は、第1の基板100と第2の基板200とを位置決めし、第1の基板100及び第2の基板200は、少なくとも1つの雄ネジ290及び少なくとも1つの雌ネジ291を介してユニットカバー420に固定することができる。少なくとも1つの雄ネジ290は、少なくとも1つの孔294、少なくとも1つの管292及び少なくとも1つの孔293を貫通して、少なくとも1つの雌ネジ291と連結することができる。
【0040】
複数の信号線160は、第2の基板200を貫通して、接続領域161の複数の孔も貫通することができる。少なくとも1つの端子460は、第2の基板200を貫通して、接続領域461の少なくとも1つの孔も貫通することができる。第3の基板300は、少なくとも1つの雄ネジ390及び少なくとも1つの雌ネジ391を介してユニットカバー420に固定することができ、複数の信号線160及び少なくとも1つの端子460は、第3の基板300に例えば半田で固定することができる。
【0041】
第3の基板300は、磁気センサとして例えばホール素子を利用するホールIC310を有し、ホールIC310を電動モータ43に近づけることができる。言い換えれば、ホールIC310は、第1の基板100及び第2の基板200を介さないで、モータカバー430又は電動モータ43と対向することが可能となり、小型の電子制御ユニット42を提供することができる。
【0042】
仮に、ホールIC310が第1の基板100及び第2の基板200を介してモータカバー430又は電動モータ43と対向する場合、電動モータ43の回転角を検出するために、第1の基板100及び第2の基板100にホールIC310に対応する孔を形成する必要がある。この孔により、第1の基板100及び第2の基板200の面積は大きくなり、電子制御ユニット42の小型化を抑制してしまう。
【0043】
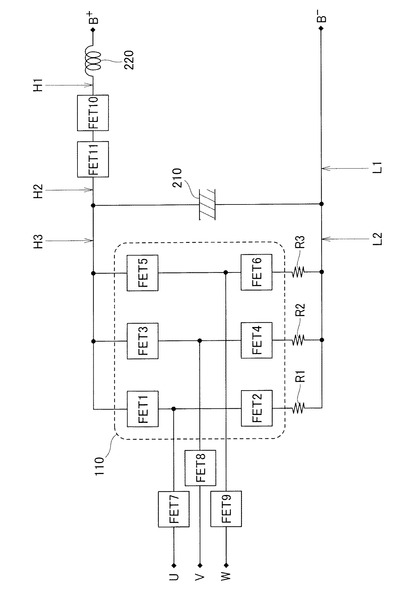
図4は、図3のスイッチング回路111と少なくとも1つの電解コンデンサ210との接続関係を表す回路構成図の1例を示す。図4の例において、B+は、例えば車両に設けられるバッテリ又は直流電源の正極の電位を示し、B−は、そのバッテリの負極の電位を示し、負極の電位B−は、車両の車体に接地することができる。なお、正極の電位B+は、外部コネクタ440のバスバーの電位B+及び第2の基板200のバスバーの電位B+と同一であり、負極の電位B−は、外部コネクタ440のバスバーの電位B−及び第2の基板200のバスバーの電位B−と同一である。外部コネクタ440は、バッテリからの電力を電子制御ユニット42に供給することができ、外部コネクタ440のバスバーと第2の基板200のバスバーとは例えば溶接で固定することができる。
【0044】
図4の例において、スイッチング回路111は、6つのFET1〜FET6から構成される3相FETブリッジ回路FET1〜FET6であり、正極の電位B+及び負極の電位B−に対して、少なくとも1つの電解コンデンサ210と並列に接続されている。スイッチング回路111は、FET以外の複数のスイッチングトランジスタ(例えばIGBT)で構成してもよい。なお、少なくとも1つの電解コンデンサ210は、例えば4つの電解コンデンサから構成される(図3参照)。
【0045】
FET1及びFET2は、正極の電位B+と負極の電位B−との間に直列に接続され、電動モータ43の例えばU巻線を流れるU相電流を生成することができる。U相電流を検出するための電流センサとして例えばシャント抵抗R1をFET2と負極の電位B−との間に設けることができ、U相電流を遮断可能な半導体リレーとして例えばFET7をFET1とFET2との接続ノードと電動モータ43への出力端子Uとの間に設けることができる。
【0046】
FET3及びFET4は、正極の電位B+と負極の電位B−との間に直列に接続され、電動モータ43の例えばV巻線を流れるV相電流を生成することができる。V相電流を検出するための電流センサとして例えばシャント抵抗R2をFET4と負極の電位B−との間に設けることができ、V相電流を遮断可能な半導体リレーとして例えばFET8をFET3とFET4との接続ノードと電動モータ43への出力端子Vとの間に設けることができる。
【0047】
FET5及びFET6は、正極の電位B+と負極の電位B−との間に直列に接続され、電動モータ43の例えばW巻線を流れるW相電流を生成することができる。W相電流を検出するための電流センサとして例えばシャント抵抗R3をFET6と負極の電位B−との間に設けることができ、W相電流を遮断可能な半導体リレーとして例えばFET9をFET5とFET6との接続ノードと電動モータ43への出力端子Wとの間に設けることができる。
【0048】
図4の例において、スイッチング回路110は、駆動信号としてU相電流、V相電流及びW相電流を電動モータ43に供給することができ、少なくとも1つの電解コンデンサ210は、駆動信号の元となる電源電圧(正極の電位B+と負極の電位B−との差)を平滑することができる。FET1、FET3及びFET5は、バッテリからの電力を遮断可能な半導体リレーとして例えばFET10及びFET11、並びにノイズフィルタとして例えばコイル220を介して、正極の電位B+に接続されている。FET1〜FET11の各々は、複数の信号線160のうちの対応する1つの信号線と接続される図示せぬゲートを有し、オン又はオフされる。
【0049】
なお、複数の信号線160のうちの対応する例えば3つの信号線は、FET2とシャント抵抗R1との接続ノード、FET4とシャント抵抗R2との接続ノード及びFET6とシャント抵抗R3との接続ノードに接続され、これらの接続ノードの電位からU相電流、V相電流及びW相電流を求めることができる。
【0050】
図4のFET1〜FET11及びシャント抵抗R1〜シャント抵抗R3は、図3の第1の基板100に設けられ、図4の出力端子U,V,Wは、図3の中継部材150の出力端子U,V,Wに対応し、図4の少なくとも1つの電解コンデンサ210は、図3の第2の基板200に設けられる。第1の基板100は、例えば金属基板で構成され、ユニットカバー420は、例えば金属で構成され、第1の基板100とユニットカバー420との間に例えばグリスを介在させ、第1の基板100(パワー基板)の放熱性を高めることができる。また、FET7〜FET11で半導体リレーを採用したことで、第1の基板100の全体の高さを低くし、小型の電子制御ユニット42を提供することができる。
【0051】
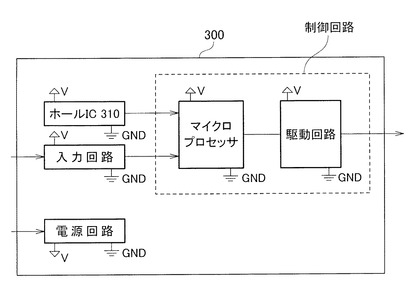
図5は、図3の第3の基板300の機能ブロック図の1例を示す。図5の例において、制御回路は、マイクロプロセッサ及び駆動回路で構成され、第3の基板300は、ホールIC310だけでなく、制御回路、入力回路及び電源回路も有することができる。なお、図3において、制御回路、入力回路及び電源回路は、図示されず、省略されている。
【0052】
制御回路は、少なくともスイッチング回路110(FET1〜FET6)を制御し、マイクロプロセッサは、目標電流を設定することができる。目標電流は、入力回路を介して取り込まれるトルク信号及びモータ電流(実電流)、並びにホールIC310を介して取り込まれる回転信号等によって設定される。駆動回路は、目標電流に基づいて、FET1〜FET6に対応する6つの制御信号(ゲート信号)を生成する。FET1〜FET6は、6つの制御信号(ゲート信号)によってオン又はオフされ、これにより、電動モータ43に駆動信号(駆動電流)が供給される。
【0053】
制御回路は、半導体リレー(FET7〜FET11)を制御することもできる。この場合、マイクロプロセッサは、FET7〜FET11の各々のオン又はオフを決定し、駆動回路は、これらの決定に基づいて、FET7〜FET11に対応する5つの制御信号(ゲート信号)を生成することができる。
【0054】
図3の複数の信号線160は、FET1〜FET11に対応するゲート信号を運ぶだけでなく、シャント抵抗R1〜シャント抵抗R3の電位を示す信号も運び、さらに、正極及び負極の電位B+,B−を示す信号も運ぶことができる。図5の電源回路は、複数の信号線160のうちの対応する2つの信号線と接続され、ホールIC310、入力回路、マイクロプロセッサ及び駆動回路の電源を生成することができる。言い換えれば、電源回路はバッテリの電源電圧(正極の電位B+と負極の電位B−との差)をロジックの電源電圧(電位Vと電位GNDとの差)に変換することができる。
【0055】
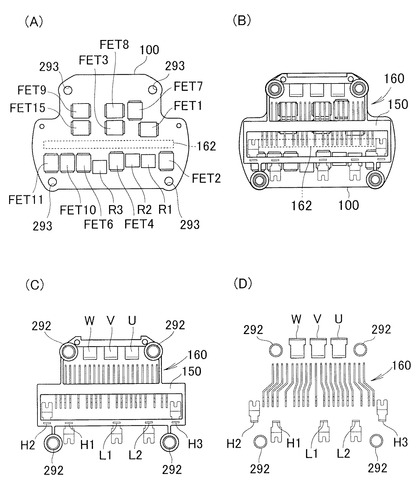
図6(A)は、図3の第1の基板100の平面図を示し、図6(B)は、中継部材150が取り付けられた第1の基板100の平面図を示し、図6(C)は、図3の中継部材150の平面図を示し、図6(D)は、図3の骨格を省略した中継部材150の平面図を示す。
【0056】
図6(A)の例において、スイッチング回路111を構成する6つのFET1〜FET6は、接続領域162によって振り分けられて配置されている。具体的には、正極の電位B+側のFET1,FET3,FET5(Hi Side FET)がU相電流、V相電流及びW相電流を遮断可能な半導体リレーを構成する3つのFET7,FET8,FET9側に配置される一方、負極の電位B−側のFET2,FET4,FET6(Low Side FET)がシャント抵抗R1,R2,R3側に配置される。
【0057】
図6(B)の例において、複数の信号線160は、接続領域162で1つの列に並んで第1の基板100に接続される。FET1,FET3,FET5とFET7,FET8,FET9との中間に1つの列(複数の信号線160)が配置されることで、6つのFET1〜FET6と1つの列(FET1〜FET6に対応する6つの制御信号(ゲート信号)を運ぶ6つの信号線160)との距離を短くすることができ、第1の基板100の面積を小さくすることができる。従って、小型の電子制御ユニット42を提供することができる。
【0058】
なお、特許文献1の図1のリードフレームSLFは、パワーモジュール210の基板の辺部に接続され、特許文献1の図9に示されるように、スイッチング素子SSWとリードフレームSLFとを接続するパワーモジュール210の基板上の配線パターンの経路又は面積が大きく、パワーモジュール210全体も大きくなってしまう。
【0059】
図6(C)の例において、中継部材150の骨格は、複数の信号線160、電動モータ43への出力端子U,V,W、第1の基板100と第2の基板200とを接続する接続端子H1,H2,L1,L2,L3、及び管292,292,292,292を例えば樹脂でモールドして形成されている。なお、出力端子U,V,Wは、それぞれ、FET7,FET8,FET9と接続されている(図4参照)。また、中継部材150の接続端子H1,H2,H3は、第1の基板100上の正極の電位B+のラインに接続され、中継部材150の接続端子L1,L2は、第1の基板100上の負極の電位B−のラインに接続される(図4参照)。図6(D)の例において、中継部材150の骨格(樹脂)は、省略されている。
【0060】
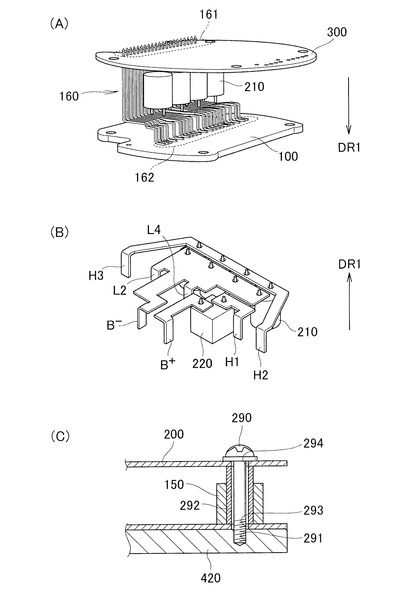
図7(A)は、図3の第1の基板100、複数の信号線160、少なくとも1つの電解コンデンサ210及び第3の基板300の配置説明図を示し、図7(B)は、図3の第2の基板200の4つのバスバー、少なくとも1つの電解コンデンサ210及びコイル220の配置説明図を示し、図7(C)は、図3の第1の基板100、中継部材150、少なくとも1つの管292、第2の基板200及び少なくとも1つの雄ネジ290の配置説明図を示す。
【0061】
図7(A)の例において、複数の信号線160は、実空間において、4つの電解コンデンサ210を迂回している。また、複数の信号線160は、1つの列に並んで第1の基板100の中央部の接続領域162に接続されるとともに、1つの列に並んで第1の基板100の辺部の接続領域161にも接続される。第1の基板100と第3の基板300との間の空間を有効に利用して複数の信号線160を配置することにより、小型の電子制御ユニット42を提供することができる。
【0062】
図7(B)の例において、外部コネクタ440のバスバー(電位B+)に対応する第2の基板200のバスバー(電位B+)は、コイル220の一端に接続されている。コイル220の他端に接続される第2の基板200のバスバー(電位H1)と図6(C)の中継部材150の接続端子H1とは例えば溶接で固定することができる。4つの電解コンデンサ210の正極の電位B+側の一端に接続される第2の基板200のバスバーの一端(電位H2)及び他端(電位H3)は、それぞれ、図6(C)の中継部材150の接続端子H2及びH3に例えば溶接で固定される。4つの電解コンデンサ210の負極の電位B−側の他端に接続される第2の基板200のバスバーの第1の端(電位L1)、第2の端(電位L2)及び第3の端(電位B−)は、それぞれ、図6(C)の中継部材150の接続端子L1,L2及び外部コネクタ440のバスバー(電位B−)に例えば溶接で固定される。
【0063】
このような配置により、第2の基板200の4つの電解コンデンサ210と第1の基板100のスイッチング回路111との間は、正極の電位B+側において中継部材150の例えば2つの接続端子H2及びH3を介して接続されるとともに、負極の電位B−側において中継部材150の例えば2つの接続端子L1及びL2を介して接続される。これにより、ラインインピーダンスを低くすることができ、スイッチング回路111の動作時に生じるサージを抑制することができる。
【0064】
図7(C)の例において、第1の基板100及び第2の基板200は、少なくとも1つの雄ネジ290等の雄ネジ部及び少なくとも1つの雌ネジ291等の雌ネジ部で共締めされる。少なくとも1つの雌ネジ291は、ユニットカバー420に設けられているので、少なくとも1つの雄ネジ290及びユニットカバー420は、第1の基板100及び第2の基板200を挟み込むことができ、小型の電子制御ユニット42を提供することができる。仮に、第1の基板100及び第2の基板200だけを独立して固定し、さらに、第1の基板100及びユニットカバー420だけを独立して固定すると、雄ネジ部及び雌ネジ部を構成する部品の数が増加してしまう。加えて、少なくとも1つの雄ネジ290を締める時に、例えば図6(C)の中継部材150の複数の信号線160、出力端子U,V,W及び接続端子H1,H2,L1,L2,L3にねじり応力が加わることがなく、第1の基板100と第2の基板200との間を電気的に接続する時の信頼性を高めることができる。
【0065】
本発明は、上述の例示的な実施形態に限定されず、また、当業者は、上述の例示的な実施形態を特許請求の範囲に含まれる範囲まで、容易に変更することができるであろう。
【符号の説明】
【0066】
10・・・電動パワーステアリング装置、20・・・ステアリング系、21・・・ステアリングハンドル、22・・・ステアリングシャフト、23・・・自在軸継手、24・・・回転軸、25・・・ラックアンドピニオン機構、26・・・ラック軸、27・・・タイロッド、28・・・ナックル、29・・・操舵車輪、31・・・ピニオン、32・・・ラック、40・・・補助トルク機構、41・・・操舵トルクセンサ、42・・・電子制御ユニット(制御部)、43・・・電動モータ、44・・・減速機構、52・・・ボールジョイント、60・・・外部機器、100・・・第1の基板、110・・・スイッチング回路、150・・・中継部材、160・・・信号線、161,162・・・接続領域、200・・・第2の基板、210・・・電解コンデンサ、220・・・コイル、290・・・雄ネジ、291・・・雌ネジ、292・・・管、293,294・・・孔、300・・・第3の基板、310・・・ホールIC、390・・・雄ネジ、391・・・雌ネジ、420・・・ユニットカバー、425,426・・・開口部、428・・・蓋、429・・・雄ネジ、430・・・モータカバー、440・・・外部コネクタ、450・・・モータ軸、460・・・端子、461・・・接続領域、490・・・雄ネジ。
【技術分野】
【0001】
本発明は、電動パワーステアリング用の電子制御ユニット等に関する。
【背景技術】
【0002】
自動車等の車両は、電動パワーステアリング装置を備えることができ、電動パワーステアリング装置は、ステアリングハンドルへの運転者による操作によって生じるステアリング系での操舵トルクを補助する補助トルクを発生させる。補助トルクの発生により、電動パワーステアリング装置は、運転者の負担を軽減することができる。補助トルクを与える補助トルク機構は、ステアリング系の操舵トルクを操舵トルクセンサで検出し、この検出信号に基づき電子制御ユニットで駆動信号を発生し、この駆動信号に基づき操舵トルクに応じた補助トルクを電動モータで発生し、補助トルクを減速機構を介してステアリング系に伝達する。
【0003】
例えば特許文献1は、電動パワーステアリング用の電子制御ユニットの構造を開示する。特許文献1の図3のモータ制御装置200(電子制御ユニット)は、モータ100の側部に、モータ100と一体に形成されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−63242号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
一般に、電動パワーステアリング用の電子制御ユニットは、小型であることが望ましい。しかしながら、小型の電動パワーステアリング用の電子制御ユニットを設計することは、当業者にとって困難である。
【0006】
本発明の1つの目的は、小型の電動パワーステアリング用の電子制御ユニットを提供することである。本発明の他の目的は、以下に例示する態様及び好ましい実施形態、並びに添付の図面を参照することによって、当業者に明らかになるであろう。
【課題を解決するための手段】
【0007】
以下に、本発明の概要を容易に理解するために、本発明に従う態様を例示する。
【0008】
本発明に従う第1の態様は、電動モータと一体に形成される電動パワーステアリング用の電子制御ユニットであって、
前記電動モータに駆動信号を供給するスイッチング回路を有する第1の基板と、
前記駆動信号の元となる電源電圧を平滑する電解コンデンサを有する第2の基板と、
前記スイッチング回路を制御する制御回路を有する第3の基板と、
前記第1の基板、前記第2の基板及び前記第3の基板を格納するユニットカバーと、
を備え、
前記ユニットカバーの開口部は、前記電動モータを格納するモータカバーによって閉じられ、
前記第1の基板、前記第2の基板、前記第3の基板及び前記モータカバーは、前記電動モータのモータ軸の方向に、前記モータカバー、前記第3の基板、前記第2の基板及び前記第1の基板の順で配置されることを特徴とする電動パワーステアリング用の電子制御ユニットに関係する。
【0009】
ユニットカバーの開口部は、電動モータを格納するモータカバーによって閉じられているので、電子制御ユニットは、独立した部品である蓋(例えば特許文献1の図1の金属筐体240)を備える必要がない。電子制御ユニットを構成する部品の数を減少することにより、小型の電動パワーステアリング用の電子制御ユニットを提供することができる。
【0010】
さらに、第1の基板、第2の基板、第3の基板及びモータカバーは、電動モータのモータ軸の方向に、モータカバー、第3の基板、第2の基板及び第1の基板の順で配置される。これにより、電子制御ユニットは、電動モータの上部又は下部に、電動モータと一体に形成することができる。スイッチング回路を電解コンデンサに対して上方又は下方に配置することができ、電子制御ユニットの出っ張りを抑制し、小型の電動パワーステアリング用の電子制御ユニットを提供することができる。従って、電子制御ユニット及び電動モータを電動パワーステアリング装置に組み込む際、配置又は設計の自由度が高い。
【0011】
なお、特許文献1の図2において、モータ制御装置200(電子制御ユニット)は、モータ100の側部に、モータ100と一体に形成され、モータ制御装置200自身が全体として出っ張りを形成する。従って、モータ制御装置200及びモータ100を電動パワーステアリング装置に組み込む際、配置又は設計の自由度が制限されてしまう。さらに、特許文献1の図1、図5及び図11において、DCモジュール230又は電解コンデンサC2,C3は、パワーモジュール210に対して左又は右に配置され、DCモジュール230又は電解コンデンサC2,C3は、モータ制御装置200の出っ張り又は大型化を招いてしまう。
【0012】
第1の態様において、前記第3の基板は、前記電動モータの回転角を検出する磁気センサを有してもよい。
【0013】
磁気センサを電動モータに近づけることができ、言い換えれば、磁気センサは、第1の基板及び第2の基板を介さないで、電動モータと対向することが可能となり、小型の電動パワーステアリング用の電子制御ユニットを提供することができる。
【0014】
仮に、磁気センサが第1の基板及び第2の基板を介して電動モータと対向する場合、電動モータの回転角を検出するために、第1の基板及び第2の基板に孔を形成する必要がある。この孔により、第1の基板及び第2の基板の面積は大きくなり、電子制御ユニットの小型化を抑制してしまう。
【0015】
第1の態様において、前記スイッチング回路は、複数のスイッチングトランジスタを有してもよく、
前記制御回路から前記複数のスイッチングトランジスタに送られる複数の制御信号を運ぶ複数の信号線は、1つの列に並んで前記第1の基板に接続されてもよく、
前記複数のスイッチングトランジスタは、前記1つの列によって振り分けられて配置されてもよい。
【0016】
複数のスイッチングトランジスタと1つの列(複数の信号線)との距離を短くすることができ、第1の基板の面積を小さくすることができる。従って、小型の電動パワーステアリング用の電子制御ユニットを提供することができる。
【0017】
なお、特許文献1の図1のリードフレームSLFは、パワーモジュール210の基板の辺部に接続され、特許文献1の図9に示されるように、スイッチング素子SSWとリードフレームSLFとを接続するパワーモジュール210の基板上の配線パターンの経路又は面積が大きく、パワーモジュール210全体も大きくなってしまう。
【0018】
第1の態様において、前記複数の信号線は、前記電解コンデンサを迂回して前記第2の基板を貫通し、1つの列に並んで前記第3の基板の辺部に接続されてもよい。
【0019】
第1の基板と第3の基板との間の空間を有効に利用して複数の信号線を配置することにより、小型の電動パワーステアリング用の電子制御ユニットを提供することができる。
【0020】
第1の態様において、前記第1の基板及び前記第2の基板は、雄ネジ部及び雌ネジ部で共締めされてもよく、
前記雌ネジ部は、前記ユニットカバーに設けられてもよく、
前記雄ネジ部は、前記第1の基板と前記第2の基板とを位置決めする管を貫通して前記雌ネジ部と連結してもよい。
【0021】
雄ネジ部及びユニットカバーは、第1の基板及び第2の基板を挟み込むことができ、小型の電動パワーステアリング用の電子制御ユニットを提供することができる。仮に、第1の基板及び第2の基板だけを独立して固定し、さらに、第1の基板及びユニットカバーだけを独立して固定すると、雄ネジ部及び雌ネジ部を構成する部品の数が増加してしまう。
【0022】
当業者は、例示した本発明に従う態様が、本発明の精神を逸脱することなく、さらに変更され得ることを容易に理解できるであろう。
【図面の簡単な説明】
【0023】
【図1】電動パワーステアリング装置の概略構成例を示す。
【図2】本発明に従う電動パワーステアリング用の電子制御ユニットの外観例を示す。
【図3】図2のユニットカバーを含む電子制御ユニットの分解斜視図の1例を示す。
【図4】図3のスイッチング回路と電解コンデンサとの接続関係を表す回路構成図の1例を示す。
【図5】図3の第3の基板の機能ブロック図の1例を示す。
【図6】図6(A)は、図3の第1の基板の平面図を示し、図6(B)は、中継部材が取り付けられた第1の基板の平面図を示し、図6(C)は、図3の中継部材の平面図を示し、図6(D)は、図3の骨格を省略した中継部材の平面図を示す。
【図7】図7(A)は、図3の第1の基板、複数の信号線、電解コンデンサ及び第3の基板の配置説明図を示し、図7(B)は、図3の第2の基板のバスバー、電解コンデンサ及びコイルの配置説明図を示し、図7(C)は、図3の第1の基板、中継部材、管292、第2の基板及び雄ネジの配置説明図を示す。
【発明を実施するための形態】
【0024】
以下に説明する好ましい実施形態は、本発明を容易に理解するために用いられている。従って、当業者は、本発明が、以下に説明される実施形態によって不当に限定されないことを留意すべきである。
【0025】
図1は、電動パワーステアリング装置10の概略構成例を示す。図1の例において、電動パワーステアリング装置10は、電動パワーステアリング用の電子制御ユニット(制御部とも言う。)42を備える。具体的には、電動パワーステアリング装置10は、車両のステアリングハンドル(例えばステアリングホイール)21から車両の操舵車輪(例えば前輪)29,29に至るステアリング系20に補助トルク(付加トルクとも言う。)を与える補助トルク機構40を備えている。
【0026】
図1の例において、ステアリング系20は、ステアリングハンドル21にステアリングシャフト22(ステアリングコラムとも言う。)及び自在軸継手23,23を介して回転軸24(ピニオン軸、入力軸とも言う。)を連結し、回転軸24にラックアンドピニオン機構25を介してラック軸26を連結し、ラック軸26の両端に左右のボールジョイント52,52、タイロッド27,27及びナックル28,28を介して左右の操舵車輪29,29を連結したものである。ラックアンドピニオン機構25は、回転軸24に有したピニオン31と、ラック軸26に有したラック32とを備える。
【0027】
ステアリング系20によれば、運転者がステアリングハンドル21を操舵することで、その操舵トルクによりラックアンドピニオン機構25を介して、操舵車輪29,29を操舵することができる。
【0028】
図1の例において、補助トルク機構40は、ステアリングハンドル21に加えたステアリング系20の操舵トルクを操舵トルクセンサ41で検出し、この検出信号(トルク信号とも言う。)に基づき電子制御ユニット42で駆動信号を発生し、この駆動信号に基づき操舵トルクに応じた補助トルク(付加トルク)を電動モータ43で発生し、補助トルクを減速機構44(例えばウォームギヤ機構)を介して回転軸24に伝達し、さらに、補助トルクを回転軸24からステアリング系20のラックアンドピニオン機構25に伝達するようにした機構である。
【0029】
補助トルクがステアリング系20に与えられる箇所によって、電動パワーステアリング装置10は、ピニオンアシスト型、ラックアシスト型、コラムアシスト型等に分類することができる。図1の電動パワーステアリング装置10は、ピニオンアシスト型を示しているが、電動パワーステアリング装置10は、ラックアシスト型、コラムアシスト型等に適用してもよい。
【0030】
電動モータ43は、例えばブラシレスモータであり、ブラシレスモータにおけるロータの回転角又は電動モータ43の回転角(回転信号とも言う。)は、電子制御ユニット42によって検出される。ロータは、例えば永久磁石で構成され、電子制御ユニット42は、永久磁石(N極及びS極)の動きを磁気センサで検出することができる。
【0031】
電子制御ユニット42は、例えば、電源回路、モータ電流(実電流)を検出する電流センサ、マイクロプロセッサ、FETブリッジ回路、磁気センサ等によって構成される。電子制御ユニット42は、トルク信号だけでなく、例えば車速信号も入力することができる。外部機器60は、例えば車速センサであるが、例えばCAN(Controller Area Network)等の車内ネットワークで通信可能な他の電子制御ユニットでもよい。マイクロプロセッサは、トルク信号、車速信号等に基づいて、電動モータ43をベクトル制御することができる。マイクロプロセッサによって制御されるFETブリッジ回路は、例えば、電動モータ43(ブラシレスモータ)に駆動電流(3相交流電流)を通電するスイッチング回路111,FET1,FET2,FET3,FET4,FET5,FET6(図4参照)によって構成される。磁気センサは、例えばホールIC310(図3参照)によって構成される。
【0032】
このような電子制御ユニット42は、少なくとも操舵トルク(トルク信号)に基づいて目標電流を設定し、好ましくは、車速センサによって検出された車速(車速信号)及び磁気センサによって検出されたロータの回転角(回転信号)も考慮して、目標電流を設定する。電子制御ユニット42は、電流センサによって検出されたモータ電流(実電流)が目標電流に一致するように、電動モータ43の駆動電流(駆動信号)を制御することができる。
【0033】
電動パワーステアリング装置10によれば、運転者の操舵トルクに電動モータ43の補助トルク(付加トルク)を加えた複合トルクにより、ラック軸26で操舵車輪29,29を操舵することができる。
【0034】
図2は、本発明に従う電動パワーステアリング用の電子制御ユニットの外観例を示す。図2の例において、ユニットカバー420は、図1の電子制御ユニット42のカバーであり、モータカバー430は、図1の電動モータ43のカバーである。電動モータ43のモータ軸450の方向にユニットカバー420が配置されるように、電子制御ユニット42は、電動モータ430と一体に形成される。図2の例において、方向DR1が電動モータ43の上を指す場合、電子制御ユニット42は、電動モータ43の上部に電動モータ43と一体に形成することができる。なお、外部コネクタ440は、モータ軸450の方向(方向DR1)に突き出し、操舵トルクセンサ41等と電子制御ユニット42とを接続する少なくとも1つの端子460(図3参照)を有している。
【0035】
図3は、図2のユニットカバー420を含む電子制御ユニット42の分解斜視図の1例を示す。図3の例において、電動パワーステアリング用の電子制御ユニット42は、第1の基板100、第2の基板200、第3の基板300及びユニットカバー420を備える。第1の基板100は、電動モータ43に駆動信号を供給するスイッチング回路110を有する。第2の基板200は、駆動信号の元となる電源電圧を平滑する少なくとも1つの電解コンデンサ210を有する。第3の基板300は、スイッチング回路110を制御する制御回路(図5参照)を有する。ユニットカバー420は、第1の基板100、第2の基板200及び第3の基板300を格納することができる。ユニットカバー420の開口部425は、モータカバー430によって閉じられている(図2参照)。なお、開口部425は、ユニットカバー420の頂部の開口であり、開口部426は、ユニットカバー420の側部の開口であり、開口部426は、板状の蓋428及び雄ネジ429によって閉じられている(図2参照)。
【0036】
ユニットカバー420の開口部425は、モータカバー430によって閉じられているので、電子制御ユニット42は、独立した部品である蓋(例えば特許文献1の図1の金属筐体240)を備える必要がない。電子制御ユニット42を構成する部品の数を減少することにより、小型の電動パワーステアリング用の電子制御ユニット42を提供することができる。なお、ユニットカバー420の開口部426は、例えば特許文献1の図1のカバー250Mに対応する。
【0037】
なお、特許文献1の図2において、モータ制御装置200(電子制御ユニット)は、モータ100の側部に、モータ100と一体に形成され、モータ制御装置200自身が全体として出っ張りを形成する。従って、モータ制御装置200及びモータ100を電動パワーステアリング装置に組み込む際、配置又は設計の自由度が制限されてしまう。さらに、特許文献1の図1、図5及び図11において、DCモジュール230又は電解コンデンサC2,C3は、パワーモジュール210に対して左又は右に配置され、DCモジュール230又は電解コンデンサC2,C3は、モータ制御装置200の出っ張り又は大型化を招いてしまう。
【0038】
電子制御ユニット42を示す図3及びモータカバー430を示す図2を参照すれば、第1の基板100、第2の基板200、第3の基板300及びモータカバー430は、電動モータ43のモータ軸450の方向(方向DR1)に、モータカバー430、第3の基板300、第2の基板200及び第1の基板100の順で配置される。方向DR1が上方を指す場合、スイッチング回路110を少なくとも1つの電解コンデンサ210に対して上方に配置することができ、電子制御ユニット42の出っ張りを抑制し、小型の電子制御ユニット42を提供することができる。従って、電子制御ユニット42及び電動モータ43を電動パワーステアリング装置10又は減速機構44に組み込む際、配置又は設計の自由度が高い。
【0039】
なお、図3の例において、外部コネクタ440は、少なくとも1つの雄ネジ490を介してユニットカバー420に固定することができる。また、中継部材150は、スイッチング回路110を制御する複数の制御信号を運ぶ複数の信号線160を有し、中継部材150が第1の基板100に取り付けられた状態で、複数の信号線160は、第1の基板100の接続領域162に例えば半田で接続されて固定することができる。管292は、第1の基板100と第2の基板200とを位置決めし、第1の基板100及び第2の基板200は、少なくとも1つの雄ネジ290及び少なくとも1つの雌ネジ291を介してユニットカバー420に固定することができる。少なくとも1つの雄ネジ290は、少なくとも1つの孔294、少なくとも1つの管292及び少なくとも1つの孔293を貫通して、少なくとも1つの雌ネジ291と連結することができる。
【0040】
複数の信号線160は、第2の基板200を貫通して、接続領域161の複数の孔も貫通することができる。少なくとも1つの端子460は、第2の基板200を貫通して、接続領域461の少なくとも1つの孔も貫通することができる。第3の基板300は、少なくとも1つの雄ネジ390及び少なくとも1つの雌ネジ391を介してユニットカバー420に固定することができ、複数の信号線160及び少なくとも1つの端子460は、第3の基板300に例えば半田で固定することができる。
【0041】
第3の基板300は、磁気センサとして例えばホール素子を利用するホールIC310を有し、ホールIC310を電動モータ43に近づけることができる。言い換えれば、ホールIC310は、第1の基板100及び第2の基板200を介さないで、モータカバー430又は電動モータ43と対向することが可能となり、小型の電子制御ユニット42を提供することができる。
【0042】
仮に、ホールIC310が第1の基板100及び第2の基板200を介してモータカバー430又は電動モータ43と対向する場合、電動モータ43の回転角を検出するために、第1の基板100及び第2の基板100にホールIC310に対応する孔を形成する必要がある。この孔により、第1の基板100及び第2の基板200の面積は大きくなり、電子制御ユニット42の小型化を抑制してしまう。
【0043】
図4は、図3のスイッチング回路111と少なくとも1つの電解コンデンサ210との接続関係を表す回路構成図の1例を示す。図4の例において、B+は、例えば車両に設けられるバッテリ又は直流電源の正極の電位を示し、B−は、そのバッテリの負極の電位を示し、負極の電位B−は、車両の車体に接地することができる。なお、正極の電位B+は、外部コネクタ440のバスバーの電位B+及び第2の基板200のバスバーの電位B+と同一であり、負極の電位B−は、外部コネクタ440のバスバーの電位B−及び第2の基板200のバスバーの電位B−と同一である。外部コネクタ440は、バッテリからの電力を電子制御ユニット42に供給することができ、外部コネクタ440のバスバーと第2の基板200のバスバーとは例えば溶接で固定することができる。
【0044】
図4の例において、スイッチング回路111は、6つのFET1〜FET6から構成される3相FETブリッジ回路FET1〜FET6であり、正極の電位B+及び負極の電位B−に対して、少なくとも1つの電解コンデンサ210と並列に接続されている。スイッチング回路111は、FET以外の複数のスイッチングトランジスタ(例えばIGBT)で構成してもよい。なお、少なくとも1つの電解コンデンサ210は、例えば4つの電解コンデンサから構成される(図3参照)。
【0045】
FET1及びFET2は、正極の電位B+と負極の電位B−との間に直列に接続され、電動モータ43の例えばU巻線を流れるU相電流を生成することができる。U相電流を検出するための電流センサとして例えばシャント抵抗R1をFET2と負極の電位B−との間に設けることができ、U相電流を遮断可能な半導体リレーとして例えばFET7をFET1とFET2との接続ノードと電動モータ43への出力端子Uとの間に設けることができる。
【0046】
FET3及びFET4は、正極の電位B+と負極の電位B−との間に直列に接続され、電動モータ43の例えばV巻線を流れるV相電流を生成することができる。V相電流を検出するための電流センサとして例えばシャント抵抗R2をFET4と負極の電位B−との間に設けることができ、V相電流を遮断可能な半導体リレーとして例えばFET8をFET3とFET4との接続ノードと電動モータ43への出力端子Vとの間に設けることができる。
【0047】
FET5及びFET6は、正極の電位B+と負極の電位B−との間に直列に接続され、電動モータ43の例えばW巻線を流れるW相電流を生成することができる。W相電流を検出するための電流センサとして例えばシャント抵抗R3をFET6と負極の電位B−との間に設けることができ、W相電流を遮断可能な半導体リレーとして例えばFET9をFET5とFET6との接続ノードと電動モータ43への出力端子Wとの間に設けることができる。
【0048】
図4の例において、スイッチング回路110は、駆動信号としてU相電流、V相電流及びW相電流を電動モータ43に供給することができ、少なくとも1つの電解コンデンサ210は、駆動信号の元となる電源電圧(正極の電位B+と負極の電位B−との差)を平滑することができる。FET1、FET3及びFET5は、バッテリからの電力を遮断可能な半導体リレーとして例えばFET10及びFET11、並びにノイズフィルタとして例えばコイル220を介して、正極の電位B+に接続されている。FET1〜FET11の各々は、複数の信号線160のうちの対応する1つの信号線と接続される図示せぬゲートを有し、オン又はオフされる。
【0049】
なお、複数の信号線160のうちの対応する例えば3つの信号線は、FET2とシャント抵抗R1との接続ノード、FET4とシャント抵抗R2との接続ノード及びFET6とシャント抵抗R3との接続ノードに接続され、これらの接続ノードの電位からU相電流、V相電流及びW相電流を求めることができる。
【0050】
図4のFET1〜FET11及びシャント抵抗R1〜シャント抵抗R3は、図3の第1の基板100に設けられ、図4の出力端子U,V,Wは、図3の中継部材150の出力端子U,V,Wに対応し、図4の少なくとも1つの電解コンデンサ210は、図3の第2の基板200に設けられる。第1の基板100は、例えば金属基板で構成され、ユニットカバー420は、例えば金属で構成され、第1の基板100とユニットカバー420との間に例えばグリスを介在させ、第1の基板100(パワー基板)の放熱性を高めることができる。また、FET7〜FET11で半導体リレーを採用したことで、第1の基板100の全体の高さを低くし、小型の電子制御ユニット42を提供することができる。
【0051】
図5は、図3の第3の基板300の機能ブロック図の1例を示す。図5の例において、制御回路は、マイクロプロセッサ及び駆動回路で構成され、第3の基板300は、ホールIC310だけでなく、制御回路、入力回路及び電源回路も有することができる。なお、図3において、制御回路、入力回路及び電源回路は、図示されず、省略されている。
【0052】
制御回路は、少なくともスイッチング回路110(FET1〜FET6)を制御し、マイクロプロセッサは、目標電流を設定することができる。目標電流は、入力回路を介して取り込まれるトルク信号及びモータ電流(実電流)、並びにホールIC310を介して取り込まれる回転信号等によって設定される。駆動回路は、目標電流に基づいて、FET1〜FET6に対応する6つの制御信号(ゲート信号)を生成する。FET1〜FET6は、6つの制御信号(ゲート信号)によってオン又はオフされ、これにより、電動モータ43に駆動信号(駆動電流)が供給される。
【0053】
制御回路は、半導体リレー(FET7〜FET11)を制御することもできる。この場合、マイクロプロセッサは、FET7〜FET11の各々のオン又はオフを決定し、駆動回路は、これらの決定に基づいて、FET7〜FET11に対応する5つの制御信号(ゲート信号)を生成することができる。
【0054】
図3の複数の信号線160は、FET1〜FET11に対応するゲート信号を運ぶだけでなく、シャント抵抗R1〜シャント抵抗R3の電位を示す信号も運び、さらに、正極及び負極の電位B+,B−を示す信号も運ぶことができる。図5の電源回路は、複数の信号線160のうちの対応する2つの信号線と接続され、ホールIC310、入力回路、マイクロプロセッサ及び駆動回路の電源を生成することができる。言い換えれば、電源回路はバッテリの電源電圧(正極の電位B+と負極の電位B−との差)をロジックの電源電圧(電位Vと電位GNDとの差)に変換することができる。
【0055】
図6(A)は、図3の第1の基板100の平面図を示し、図6(B)は、中継部材150が取り付けられた第1の基板100の平面図を示し、図6(C)は、図3の中継部材150の平面図を示し、図6(D)は、図3の骨格を省略した中継部材150の平面図を示す。
【0056】
図6(A)の例において、スイッチング回路111を構成する6つのFET1〜FET6は、接続領域162によって振り分けられて配置されている。具体的には、正極の電位B+側のFET1,FET3,FET5(Hi Side FET)がU相電流、V相電流及びW相電流を遮断可能な半導体リレーを構成する3つのFET7,FET8,FET9側に配置される一方、負極の電位B−側のFET2,FET4,FET6(Low Side FET)がシャント抵抗R1,R2,R3側に配置される。
【0057】
図6(B)の例において、複数の信号線160は、接続領域162で1つの列に並んで第1の基板100に接続される。FET1,FET3,FET5とFET7,FET8,FET9との中間に1つの列(複数の信号線160)が配置されることで、6つのFET1〜FET6と1つの列(FET1〜FET6に対応する6つの制御信号(ゲート信号)を運ぶ6つの信号線160)との距離を短くすることができ、第1の基板100の面積を小さくすることができる。従って、小型の電子制御ユニット42を提供することができる。
【0058】
なお、特許文献1の図1のリードフレームSLFは、パワーモジュール210の基板の辺部に接続され、特許文献1の図9に示されるように、スイッチング素子SSWとリードフレームSLFとを接続するパワーモジュール210の基板上の配線パターンの経路又は面積が大きく、パワーモジュール210全体も大きくなってしまう。
【0059】
図6(C)の例において、中継部材150の骨格は、複数の信号線160、電動モータ43への出力端子U,V,W、第1の基板100と第2の基板200とを接続する接続端子H1,H2,L1,L2,L3、及び管292,292,292,292を例えば樹脂でモールドして形成されている。なお、出力端子U,V,Wは、それぞれ、FET7,FET8,FET9と接続されている(図4参照)。また、中継部材150の接続端子H1,H2,H3は、第1の基板100上の正極の電位B+のラインに接続され、中継部材150の接続端子L1,L2は、第1の基板100上の負極の電位B−のラインに接続される(図4参照)。図6(D)の例において、中継部材150の骨格(樹脂)は、省略されている。
【0060】
図7(A)は、図3の第1の基板100、複数の信号線160、少なくとも1つの電解コンデンサ210及び第3の基板300の配置説明図を示し、図7(B)は、図3の第2の基板200の4つのバスバー、少なくとも1つの電解コンデンサ210及びコイル220の配置説明図を示し、図7(C)は、図3の第1の基板100、中継部材150、少なくとも1つの管292、第2の基板200及び少なくとも1つの雄ネジ290の配置説明図を示す。
【0061】
図7(A)の例において、複数の信号線160は、実空間において、4つの電解コンデンサ210を迂回している。また、複数の信号線160は、1つの列に並んで第1の基板100の中央部の接続領域162に接続されるとともに、1つの列に並んで第1の基板100の辺部の接続領域161にも接続される。第1の基板100と第3の基板300との間の空間を有効に利用して複数の信号線160を配置することにより、小型の電子制御ユニット42を提供することができる。
【0062】
図7(B)の例において、外部コネクタ440のバスバー(電位B+)に対応する第2の基板200のバスバー(電位B+)は、コイル220の一端に接続されている。コイル220の他端に接続される第2の基板200のバスバー(電位H1)と図6(C)の中継部材150の接続端子H1とは例えば溶接で固定することができる。4つの電解コンデンサ210の正極の電位B+側の一端に接続される第2の基板200のバスバーの一端(電位H2)及び他端(電位H3)は、それぞれ、図6(C)の中継部材150の接続端子H2及びH3に例えば溶接で固定される。4つの電解コンデンサ210の負極の電位B−側の他端に接続される第2の基板200のバスバーの第1の端(電位L1)、第2の端(電位L2)及び第3の端(電位B−)は、それぞれ、図6(C)の中継部材150の接続端子L1,L2及び外部コネクタ440のバスバー(電位B−)に例えば溶接で固定される。
【0063】
このような配置により、第2の基板200の4つの電解コンデンサ210と第1の基板100のスイッチング回路111との間は、正極の電位B+側において中継部材150の例えば2つの接続端子H2及びH3を介して接続されるとともに、負極の電位B−側において中継部材150の例えば2つの接続端子L1及びL2を介して接続される。これにより、ラインインピーダンスを低くすることができ、スイッチング回路111の動作時に生じるサージを抑制することができる。
【0064】
図7(C)の例において、第1の基板100及び第2の基板200は、少なくとも1つの雄ネジ290等の雄ネジ部及び少なくとも1つの雌ネジ291等の雌ネジ部で共締めされる。少なくとも1つの雌ネジ291は、ユニットカバー420に設けられているので、少なくとも1つの雄ネジ290及びユニットカバー420は、第1の基板100及び第2の基板200を挟み込むことができ、小型の電子制御ユニット42を提供することができる。仮に、第1の基板100及び第2の基板200だけを独立して固定し、さらに、第1の基板100及びユニットカバー420だけを独立して固定すると、雄ネジ部及び雌ネジ部を構成する部品の数が増加してしまう。加えて、少なくとも1つの雄ネジ290を締める時に、例えば図6(C)の中継部材150の複数の信号線160、出力端子U,V,W及び接続端子H1,H2,L1,L2,L3にねじり応力が加わることがなく、第1の基板100と第2の基板200との間を電気的に接続する時の信頼性を高めることができる。
【0065】
本発明は、上述の例示的な実施形態に限定されず、また、当業者は、上述の例示的な実施形態を特許請求の範囲に含まれる範囲まで、容易に変更することができるであろう。
【符号の説明】
【0066】
10・・・電動パワーステアリング装置、20・・・ステアリング系、21・・・ステアリングハンドル、22・・・ステアリングシャフト、23・・・自在軸継手、24・・・回転軸、25・・・ラックアンドピニオン機構、26・・・ラック軸、27・・・タイロッド、28・・・ナックル、29・・・操舵車輪、31・・・ピニオン、32・・・ラック、40・・・補助トルク機構、41・・・操舵トルクセンサ、42・・・電子制御ユニット(制御部)、43・・・電動モータ、44・・・減速機構、52・・・ボールジョイント、60・・・外部機器、100・・・第1の基板、110・・・スイッチング回路、150・・・中継部材、160・・・信号線、161,162・・・接続領域、200・・・第2の基板、210・・・電解コンデンサ、220・・・コイル、290・・・雄ネジ、291・・・雌ネジ、292・・・管、293,294・・・孔、300・・・第3の基板、310・・・ホールIC、390・・・雄ネジ、391・・・雌ネジ、420・・・ユニットカバー、425,426・・・開口部、428・・・蓋、429・・・雄ネジ、430・・・モータカバー、440・・・外部コネクタ、450・・・モータ軸、460・・・端子、461・・・接続領域、490・・・雄ネジ。
【特許請求の範囲】
【請求項1】
電動モータと一体に形成される電動パワーステアリング用の電子制御ユニットであって、
前記電動モータに駆動信号を供給するスイッチング回路を有する第1の基板と、
前記駆動信号の元となる電源電圧を平滑する電解コンデンサを有する第2の基板と、
前記スイッチング回路を制御する制御回路を有する第3の基板と、
前記第1の基板、前記第2の基板及び前記第3の基板を格納するユニットカバーと、
を備え、
前記ユニットカバーの開口部は、前記電動モータを格納するモータカバーによって閉じられ、
前記第1の基板、前記第2の基板、前記第3の基板及び前記モータカバーは、前記電動モータのモータ軸の方向に、前記モータカバー、前記第3の基板、前記第2の基板及び前記第1の基板の順で配置されることを特徴とする電動パワーステアリング用の電子制御ユニット。
【請求項2】
前記第3の基板は、前記電動モータの回転角を検出する磁気センサを有することを特徴とする請求項1に記載の電動パワーステアリング用の電子制御ユニット。
【請求項3】
前記スイッチング回路は、複数のスイッチングトランジスタを有し、
前記制御回路から前記複数のスイッチングトランジスタに送られる複数の制御信号を運ぶ複数の信号線は、1つの列に並んで前記第1の基板に接続され、
前記複数のスイッチングトランジスタは、前記1つの列によって振り分けられて配置されることを特徴とする請求項1又は2に記載の電動パワーステアリング用の電子制御ユニット。
【請求項4】
前記複数の信号線は、前記電解コンデンサを迂回して前記第2の基板を貫通し、1つの列に並んで前記第3の基板の辺部に接続されることを特徴とする請求項3に記載の電動パワーステアリング用の電子制御ユニット。
【請求項5】
前記第1の基板及び前記第2の基板は、雄ネジ部及び雌ネジ部で共締めされ、
前記雌ネジ部は、前記ユニットカバーに設けられ、
前記雄ネジ部は、前記第1の基板と前記第2の基板とを位置決めする管を貫通して前記雌ネジ部と連結することを特徴とする請求項1乃至4の何れか1項に記載の電動パワーステアリング用の電子制御ユニット。
【請求項1】
電動モータと一体に形成される電動パワーステアリング用の電子制御ユニットであって、
前記電動モータに駆動信号を供給するスイッチング回路を有する第1の基板と、
前記駆動信号の元となる電源電圧を平滑する電解コンデンサを有する第2の基板と、
前記スイッチング回路を制御する制御回路を有する第3の基板と、
前記第1の基板、前記第2の基板及び前記第3の基板を格納するユニットカバーと、
を備え、
前記ユニットカバーの開口部は、前記電動モータを格納するモータカバーによって閉じられ、
前記第1の基板、前記第2の基板、前記第3の基板及び前記モータカバーは、前記電動モータのモータ軸の方向に、前記モータカバー、前記第3の基板、前記第2の基板及び前記第1の基板の順で配置されることを特徴とする電動パワーステアリング用の電子制御ユニット。
【請求項2】
前記第3の基板は、前記電動モータの回転角を検出する磁気センサを有することを特徴とする請求項1に記載の電動パワーステアリング用の電子制御ユニット。
【請求項3】
前記スイッチング回路は、複数のスイッチングトランジスタを有し、
前記制御回路から前記複数のスイッチングトランジスタに送られる複数の制御信号を運ぶ複数の信号線は、1つの列に並んで前記第1の基板に接続され、
前記複数のスイッチングトランジスタは、前記1つの列によって振り分けられて配置されることを特徴とする請求項1又は2に記載の電動パワーステアリング用の電子制御ユニット。
【請求項4】
前記複数の信号線は、前記電解コンデンサを迂回して前記第2の基板を貫通し、1つの列に並んで前記第3の基板の辺部に接続されることを特徴とする請求項3に記載の電動パワーステアリング用の電子制御ユニット。
【請求項5】
前記第1の基板及び前記第2の基板は、雄ネジ部及び雌ネジ部で共締めされ、
前記雌ネジ部は、前記ユニットカバーに設けられ、
前記雄ネジ部は、前記第1の基板と前記第2の基板とを位置決めする管を貫通して前記雌ネジ部と連結することを特徴とする請求項1乃至4の何れか1項に記載の電動パワーステアリング用の電子制御ユニット。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−106376(P2013−106376A)
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願番号】特願2011−246672(P2011−246672)
【出願日】平成23年11月10日(2011.11.10)
【出願人】(300052246)株式会社ホンダエレシス (105)
【Fターム(参考)】
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願日】平成23年11月10日(2011.11.10)
【出願人】(300052246)株式会社ホンダエレシス (105)
【Fターム(参考)】
[ Back to top ]