
電動パワーステアリング装置の制御装置

【課題】スタックの解消に対してより高く貢献することのできる電動パワーステアリング装置の制御装置を提供する。
【解決手段】電動パワーステアリング装置の制御装置は、アシストモータの電流制御により転舵輪の転舵角θtを変更する自動操舵制御を行なう。そして、自動操舵制御により転舵輪のグリップが発生した転舵角θtを検出する。
【解決手段】電動パワーステアリング装置の制御装置は、アシストモータの電流制御により転舵輪の転舵角θtを変更する自動操舵制御を行なう。そして、自動操舵制御により転舵輪のグリップが発生した転舵角θtを検出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電動モータの電流制御により転舵輪の転舵角を変更する自動操舵制御を行なう電動パワーステアリング装置の制御装置に関する。
【背景技術】
【0002】
従来の電動パワーステアリング装置として、特許文献1に記載の技術が知られている。
特許文献1に記載の電動パワーステアリング装置の制御装置は、車両がスタックしたとき、運転者のアクセルペダルの操作に応じて転舵輪の転舵角を変更する。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006−306205号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の制御装置は、転舵輪のグリップが発生しているか否かに関係なく、予めプログラムされた内容に従い転舵輪の転舵角を変更するため、一度は発生した転舵輪のグリップが再びグリップしていない状態に遷移するおそれがある。この場合には、スタックの解消が遅延する。
【0005】
本発明はこのような実情に鑑みてなされたものでありその目的は、スタックの解消に対してより高く貢献することのできる電動パワーステアリング装置の制御装置を提供することにある。
【課題を解決するための手段】
【0006】
以下、上記目的を達成するための手段を以下に記載する。
(1)第1の手段は、請求項1に記載の事項すなわち、「電動モータの電流制御により転舵輪の転舵角を変更する自動操舵制御を行なう電動パワーステアリング装置の制御装置において、前記自動操舵制御により前記転舵輪のグリップが発生した転舵角を検出すること」を要旨とする。
【0007】
この発明によれば、自動操舵制御により転舵輪のグリップが発生した転舵角を検出するため、運転者が転舵輪のグリップの発生を判断してスタックを解消するための動作を行なう構成と比較して、スタックを解消するための動作が早期に開始される可能性が高くなる。すなわち、スタックの解消に対してより高く貢献することができる。
【0008】
(2)第2の手段は、請求項2に記載の事項すなわち、「請求項1に記載の電動パワーステアリング装置の制御装置において、前記転舵輪のグリップが発生したとき、前記自動操舵制御を停止すること」を要旨とする。
【0009】
この発明によれば、転舵輪のグリップが発生したとき自動操舵制御を停止するため、グリップのあるところで次の運転操作を行うことができる。このため、スタックの解消の可能性が高くなる。
【0010】
(3)第3の手段は、請求項3に記載の事項すなわち、「請求項1または2に記載の電動パワーステアリング装置の制御装置において、前記転舵輪のグリップが発生したとき、前記転舵輪のグリップが発生したことを報知するための報知装置を作動させること」を要旨とする。
【0011】
このような報知がない場合は、運転者は次の運転操作をいつ開始すればよいか判断することができない。この点、本発明によれば、転舵輪のグリップが発生したことを運転者に報知するため、スタックの解消に対し好適なタイミングで次の運転操作を行うことができる。
【0012】
(4)第4の手段は、請求項4に記載の事項すなわち、「請求項1〜3のいずれか一項に記載される電動パワーステアリング装置の制御装置において、前記転舵輪のグリップの発生が反映される前記電動モータのパラメータをグリップパラメータとして、前記自動操舵制御の実行中かつ前記グリップパラメータが所定値以上のとき、前記転舵輪のグリップが発生している旨判定すること」を要旨とする。
【0013】
この発明によれば、転舵輪のグリップの発生が反映される電動モータのグリップパラメータを用いてグリップのあるところを検出する。このため、転舵輪のグリップを運転者のステアリング操作により検出する場合と比較して、グリップのあるところを精確に把握することができる。これにより、スタック解消の確度を高くすることができる。
【0014】
(5)第5の手段は、請求項5に記載の事項すなわち、「請求項1〜4のいずれか一項に記載される電動パワーステアリング装置の制御装置において、前記電動パワーステアリング装置は、ステアリングと一体的に回転する第1シャフトと、この第1シャフトに反力を付与する反力モータと、ラックシャフトに連動して回転する第2シャフトと、この第2シャフトにトルクを付与するアシストモータとしての前記電動モータとを含むこと」を要旨とする。
【0015】
この発明によれば、ステアリングの回転に独立して第2シャフトを回転することが可能であるため、自動操舵制御中にステアリングを所定角度に維持することが可能である。すなわち、自動操舵制御中においても運転者はステアリングを所定角度で把持することができる。
【0016】
(6)第6の手段は、請求項6に記載の事項すなわち、「請求項5に記載の電動パワーステアリング装置の制御装置において、前記転舵輪のグリップが発生しているとき、前記反力モータの電流制御により前記第1シャフトの操舵角と前記転舵輪の転舵角との差を小さくすること」を要旨とする。
【0017】
自動操舵制御によれば、第1シャフトと第2シャフトとが独立して回転するため、ステアリングシャフトの角度と第2シャフトの角度とが一致しなくなる。このため、自動操舵制御により転舵輪のグリップが生じるところを検出したときに車両を進行させると、運転者が予期しない方向に車両が進行する。この点、本発明では、自動操舵制御により転舵輪のグリップが生じるところを検出したとき、第1シャフトの操舵角と転舵輪の転舵角との差を小さくする。これにより、運転者が予期しない方向に車両が進行するといった事象を少なくすることができる。
【0018】
(7)第7の手段は、請求項7に記載の事項すなわち、「請求項1〜6のいずれか一項に記載される電動パワーステアリング装置の制御装置において、前記自動操舵制御の開始を要求する自動制御要求装置を含むこと」を要旨とする。
【0019】
スタックが生じたとき自動操舵制御が自動的に実行する構成としたとき、転舵輪の動作が運転者にとっては不意な動作となる。この点、本発明では、自動操舵制御を開始するための自動操舵制御の開始操作を必要とする。すなわち、運転者の意思に基づいて自動操舵制御を開始する構成としているため、運転者に対して不意となる動作が少ない。
【0020】
(8)第8の手段は、請求項8に記載の事項すなわち、「請求項1〜7のいずれか一項に記載される電動パワーステアリング装置の制御装置において、前記自動操舵制御は前記転舵輪の回転速度を低下させる要求を入力するための速度低下要求装置が操作されたことを示す操作信号を検出したとき、本制御を終了するものであること」を要旨とする。
【0021】
この発明によれば、速度低下要求装置の操作信号に基づいて自動操舵制御が終了するため、運転者の意思により自動操舵制御を終了することが可能である。これにより、グリップが生じているか否かに拘わらず、転舵輪の転舵を任意に止めることができる。
【発明の効果】
【0022】
本発明によれば、スタックの解消に対してより高く貢献することのできる電動パワーステアリング装置の制御装置を提供することができる。
【図面の簡単な説明】
【0023】
【図1】本発明の一実施形態の電動パワーステアリング装置について、その全体構造を模式的に示す模式図。
【図2】同実施形態の電動パワーステアリング装置について、その回転比変更機構の断面構造を示す断面図。
【図3】同実施形態の電動パワーステアリング装置について、電子制御装置により実行される「自動操舵制御」の手順を示すフローチャート。
【図4】同実施形態の電動パワーステアリング装置について、電子制御装置により実行される「グリップ検出制御」の手順を示すフローチャート。
【図5】同実施形態の電動パワーステアリング装置について、(a)はアシストモータの電流の時間変化を示すグラフ、(b)は転舵角の時間変化を示すグラフ。
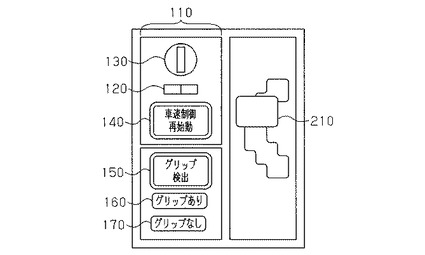
【図6】第2実施形態の電動パワーステアリング装置について、操作パネルの平面構造を示す平面図。
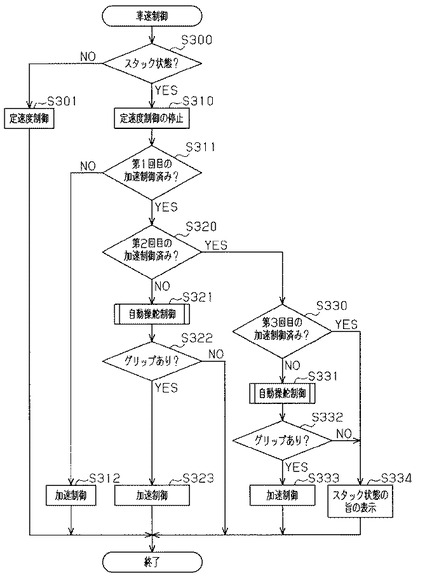
【図7】同実施形態の電動パワーステアリング装置について、電子制御装置により実行される「車速制御」の手順を示すフローチャート。
【図8】同実施形態の電動パワーステアリング装置について、電子制御装置により実行される「自動操舵制御」の手順を示すフローチャート。
【発明を実施するための形態】
【0024】
<第1実施形態>
図1に示すように、電動パワーステアリング装置1は、ステアリング2の回転を転舵輪3に伝達する操舵角伝達機構10と、ステアリング2の操作を補助するための力(以下、「アシスト力」)を操舵角伝達機構10に付与するEPSアクチュエータ20と、EPSアクチュエータ20を制御する電子制御装置(制御装置)40とを備える。さらに、電動パワーステアリング装置1には、これら装置の動作状態を検出する複数のセンサが設けられている。
【0025】
操舵角伝達機構10は、ステアリング2の操作に応じて回転するステアリングシャフト11と、ステアリングシャフト11の回転をラックシャフト13に伝達するラックアンドピニオン機構12と、タイロッド14を操作するラックシャフト13と、ナックルを操作するタイロッド14とを備える。操舵角伝達機構10はステアリング2の操作によりこれらの機構を介して転舵輪3の方向を変更する。
【0026】
ステアリングシャフト11は、4つのシャフト、すなわち第1シャフト11A、第2シャフト11B、第3シャフト11C、および第4シャフト11Dを備えている。第1シャフト11Aはステアリング2に接続されている。第2シャフト11Bは第1シャフト11Aの回転動力を第3シャフト11Cに伝達する。第3シャフト11Cは、第2シャフト11Bと第4シャフト11Dとの間に設けられて第2シャフト11Bの回転動力を第4シャフト11Dに伝達する。第4シャフト11Dは、ラックアンドピニオン機構12に回転動力を伝達する。
【0027】
EPSアクチュエータ20は、第1シャフト11Aにトルクを付与する反力モータ21と、反力モータ21の回転動力を第1シャフト11Aに伝達するギア機構22と、第1シャフト11Aの回転動力を第2シャフト11Bに伝達する回転比変更機構30とを備えている。反力モータ21から第1シャフト11Aに付与されるトルクはステアリング2の回転に対する反力として作用する。
【0028】
図2を参照して、回転比変更機構30について説明する。
回転比変更機構30は、第1シャフト11Aを太陽軸とする遊星歯車機構30Aと、遊星歯車機構30Aのキャリア35を駆動するアシストモータ23とを備えている。
【0029】
遊星歯車機構30Aは、第1シャフト11Aと同軸に設けられた第1太陽歯車31と、第2シャフト11Bと同軸に設けられた第2太陽歯車32と、第1太陽歯車31および第2太陽歯車32の周囲を回転する第1遊星軸33および第2遊星軸34と、第1遊星軸33および第2遊星軸34に接触するキャリア35とを備えている。
【0030】
遊星歯車機構30Aは、これらの構成要素に加えて、第1遊星軸33に設けられた第1遊星歯車33Aおよび第2遊星歯車33Bと、第2遊星軸34に設けられた第3遊星歯車34Aおよび第4遊星歯車34Bとを備えている。第1遊星歯車33Aは第1太陽歯車31と噛み合う。第2遊星歯車33Bは第2太陽歯車32と噛み合う。第3遊星歯車34Aは第1太陽歯車31と噛み合う。第4遊星歯車34Bは第2太陽歯車32と噛み合う。
【0031】
アシストモータ23の回転動力は、キャリア35の外周に設けられた伝達ギア35Aを介して回転比変更機構30に伝達される。具体的には、アシストモータ23により次のようにキャリア35の回転を制御することにより、第1シャフト11Aの回転動力を増大または減少させて第2シャフト11Bに伝達する。
【0032】
アシストモータ23は次のように動作する。
(A)キャリア35の回転速度を第1シャフト11Aの回転速度と等しくすることにより、第1シャフト11Aの回転速度と第2シャフト11Bの回転速度とを等しくする。
【0033】
(B)キャリア35の回転速度を第1シャフト11Aの回転速度よりも大きくすることにより、第2シャフト11Bの回転速度を第1シャフト11Aの回転速度よりも小さくする。
【0034】
(C)キャリア35の回転速度を第1シャフト11Aの回転速度よりも小さくすることにより、第2シャフト11Bの回転速度を第1シャフト11Aの回転速度よりも大きくする。
【0035】
電動パワーステアリング装置1には、ステアリング2のトルクを検出するトルクセンサ41と、第1シャフト11Aの回転量を検出する操舵角センサ42と、第2シャフト11Bの回転量を検出する転舵角センサ43とが設けられている。また、同装置1には、反力モータ21の電流(以下、「Ima」)を測定する第1電流センサ44と、アシストモータ23の電流(以下、「Imb」)を測定する第2電流センサ45とが設けられている。
【0036】
電動パワーステアリング装置1には、これらのセンサに加えて、転舵輪3のグリップを検出するためのグリップ検出スイッチ49と、転舵輪3のグリップの有無を報知する表示装置50とが設けられている。
【0037】
また、これらの装置に加えて、電動パワーステアリング装置1には、車速に対応する値を検出する車速センサ46からの信号を受信する入力ポートと、車両の回転に対応する値を検出するヨーレートセンサ47からの信号を受信する入力ポートと、車両のブレーキペダル48からのブレーキ信号Sblkを受信する入力ポートとが設けられている。
【0038】
また、電動パワーステアリング装置1には、車両の内燃機関を制御する車両制御装置200からの情報を受信し、かつ電動パワーステアリング装置1からの情報を送信するための送受信ポートが設けられている。電動パワーステアリング装置1から出力する情報としてはアクセル操作に関する情報が含まれる。
【0039】
電動パワーステアリング装置1に設けられた各センサは、検出対象の状態変化に応じた信号を出力する。
トルクセンサ41は、ステアリング2の操作によりステアリングシャフト11に付与されたトルクの大きさに応じた信号(以下、「出力信号SA」)を電子制御装置40に出力する。操舵角センサ42は、第1シャフト11Aの回転量に応じた信号(以下、「出力信号SB」)を電子制御装置40に出力する。転舵角センサ43は、第2シャフト11Bの回転量に応じた信号(以下、「出力信号SC」)を電子制御装置40に出力する。車速センサ46は、転舵輪3の回転速度に応じた信号(以下、「出力信号SD」)を電子制御装置40に出力する。ヨーレートセンサ47は、車両の回転に応じた信号(以下、「出力信号SE」)を電子制御装置40に出力する。
【0040】
電子制御装置40は、各センサの出力に基づいて次の演算を行う。
トルクセンサ41の出力信号SAに基づいて、ステアリング2の操作にともない第1シャフト11Aに入力されたトルクの大きさに相当する演算値(以下、「操舵トルクτ」)を算出する。操舵角センサ42の出力信号SBに基づいてステアリング2の操舵角θsを算出する。転舵角センサ43の出力信号SCに基づいて転舵輪3の回転量に対応する転舵角θtを算出する。車速センサ46の出力信号SDに基づいて、車両の走行速度に相当する演算値(以下「車速V」)を算出する。ヨーレートセンサ47の出力信号SEに基づいて、車両の回転速度に相当する演算値(以下「ヨーレートγ」)を算出する。
【0041】
グリップ検出スイッチ49は、自動操舵制御を開始およびその実行を停止するためのスイッチである。グリップ検出スイッチ49は「オン状態」と「オフ状態」との2つの状態を有する。「オン状態」のときグリップ検出スイッチ49は点灯する。一方、「オフ状態」のときグリップ検出スイッチ49は消灯する。
【0042】
グリップ検出スイッチ49が「オフ状態」のときに、グリップ検出スイッチ49が押されたとき「オン状態」に切り替わる。グリップ検出スイッチ49が「オン状態」のときに、グリップ検出スイッチ49が押されたとき「オフ状態」に切り替わる。
【0043】
表示装置50は、転舵輪3のグリップがあることを検出したこと、および転舵輪3のグリップがあるところを検出しなかったことを表示する。表示装置50は、車両のフロントパネル等、運転者が運転中に視認することができる場所に設けられている。
【0044】
次に、電動パワーステアリング装置1の動作を説明する。
ステアリング2が操作されるとき、反力モータ21の力が第1シャフト11Aに付与されて、回転方向と反対の力(以下、「反力」)が与えられる。第1シャフト11Aに付与される力が反力よりも大きくなるときステアリング2が回転する。ステアリング2の回転動力は、第1シャフト11Aから回転比変更機構30を介して第2シャフト11Bに伝達される。第2シャフト11Bの回転動力は第3シャフト11Cを介して第4シャフト11Dに伝達され、ラックアンドピニオン機構12によりラックシャフト13の直線運動に変換される。ラックシャフト13の直線運動は、同ラックシャフト13の両端に連結されたタイロッド14を介してナックルに伝達される。そして、ナックルの動作にともない転舵輪3の舵角が変更される。
【0045】
ステアリング2の操舵状態について説明する。
ステアリング2の操舵角θsは、ステアリング2が中立位置にあるときを基準として定められる。すなわち、ステアリング2が中立位置にあるときの操舵角θsを「0」として、ステアリング2が中立位置から右方向または左方向に回転したとき、中立位置からの回転角度に応じて操舵角θsが増加する。
【0046】
転舵輪3の転舵角θtについて説明する。
転舵輪3は、右回転方向に右最大角度まで回転し、また、左回転方向に左最大角度まで回転する。転舵輪3が車両の進行方向に向いているときの転舵角θtを「0」として、転舵輪3が右最大角度まで回転したときの転舵角θtを「最右転舵角θrmax」とし、転舵輪3が左最大角度まで回転したときの転舵角θtを「最左転舵角θlmax」とする。
【0047】
転舵輪3の全範囲にわたる回転に対応する転舵角θtを「総転舵角θttl」とする。総転舵角θttlは次のように与えられる。すなわち、総転舵角θttlは、転舵輪3が所定の転舵角θtxから最右転舵角θrmaxまで回転し、最右転舵角θrmaxから最左転舵角θlmaxまで回転し、最左転舵角θlmaxから元の所定転舵角θtxまで回転するときの回転量とする。具体的には、総転舵角θttlは「(最右転舵角θrmax+最左転舵角θlmax)×2」で与えられる。
【0048】
電動パワーステアリング装置1の動作モードについて説明する。
動作モードには、通常モードと、アクティブモードと、グリップ検出モードとがある。
通常モードのとき、第1シャフト11Aの回転速度に対する第2シャフト11Bの回転速度の比(以下、「回転速度比」)は「1」に固定される。このモードは、車両の通常の走行時において実行される。すなわち、オーバステアまたはスタック等の特定のモードが生じない限りにおいて実行される。
【0049】
アクティブモードのとき、運転状況により回転速度比が随時変更される。例えば、ヨーレートγ等の値に基づいてステアリングシャフト11の操作がオーバステアと判定されるとき、回転速度比を変更することにより、第1シャフト11Aの回転方向とは反対方向に第2シャフト11Bを回転させる。
【0050】
グリップ検出モードのとき、第1シャフト11Aが固定された状態で、キャリア35が回転する。すなわち、第1シャフト11Aの回転とは独立して、キャリア35の回転により第2シャフト11Bが回転する。なお、第1シャフト11Aの固定は、操舵トルクτに基づいて第1シャフト11Aに加わる力を算出し、この力と反対方向の力を反力モータ21により付与することにより、実現される。
【0051】
グリップ検出モードは、車両の転舵輪3が溝に嵌まり込んで転舵輪3が空転する状態になったとき、転舵輪3のグリップが生じるところを検出するために用いられる。
従来では、運転者がステアリング2の操作を行ってグリップのあるところを運転者のステアリング操作により把握していたが、グリップがあることを手動の操舵で把握することは難しい。そこで、自動操舵制御を実行して転舵輪3のグリップが生じるところを検出する。
【0052】
図3を参照して、電子制御装置40が実行する「自動操舵制御」について説明する。なお同処理は、電子制御装置40により所定の演算周期毎に繰り返し実行される。
ステップS110において、グリップ検出スイッチ49がオン状態か否かについて判定する。この判定が否定されるときは、同処理が終了する。一方、グリップ検出スイッチ49が「オン状態」になっている旨判定されるとき、次のステップに移行する。すなわち、車両がスタックであると運転者が判断してグリップ検出スイッチ49を押すことにより、自動操舵制御が実行される。
【0053】
ステップS120、すなわちグリップ検出スイッチ49が「オン状態」のとき、スロットル制御を禁止する旨の信号(以下、「スロットル制御禁止信号」)を出力する。スロットル制御禁止信号は、仮にアクセルが踏まれたとき、車両のスロットル(吸気弁)の開度が増大しない制御を車両制御装置200に要求するものである。これにより、自動操舵制御が実行されるとき、転舵輪3が車軸周りで回転することを禁止し、グリップの検出と同時に車両が動き出すことを抑制する。
【0054】
ステップS130、すなわちスロットル制御禁止信号を出力したあと、「グリップ検出制御」を実行する。この制御においては、転舵輪3を操舵してグリップの生じるところを検出する。グリップが検出されたときは、運転者にグリップを検出した旨を報知する。
【0055】
ステップS140、すなわち「グリップ検出制御」の終了後、スロットル制御の禁止を解除する旨の信号を出力する。これにより、スロットルの開度制御が禁止されている状態からスロットルの開度制御を行うことが可能な状態に戻される。
【0056】
図4を参照して、「グリップ検出制御」について説明する。
ステップS200では、反力モータ21により第1シャフト11Aの回転を固定する。
これにより、転舵輪3を転舵させるためにキャリア35を回転させることに伴い第1シャフト11Aが回転することを抑制する。
【0057】
ステップS210では、転舵輪3を回転する。すなわち、アシストモータ23により第2シャフト11Bを回転して、転舵輪3を所定方向に転舵する。
例えば、転舵角θtが「0」にあるとき、転舵角θtを「0」から「最右転舵角θrmax」まで変化させる。続いて、転舵角θtを「最右転舵角θrmax」から「最左転舵角θlmax」まで変化させる。更に、転舵角θtを「最左転舵角θlmax」から「0」まで変化させる。
【0058】
転舵角θtを変化させるとき、目標転舵角θtaを設定し、転舵角θtが目標転舵角θtaと一致するように第2シャフト11Bを回転させる。目標転舵角θtaは、転舵開始からの経過時間に応じて変化させる。目標転舵角θtaと転舵角θtとの間に乖離が大きくなるとき、アシストモータ23に供給する電流Imbを大きくし、これにより第2シャフト11Bのトルクを大きくする。
【0059】
ステップS220では、転舵輪3の転舵中にブレーキ信号Sblkの有無を検出する。ブレーキ信号Sblkがあるとき、ステップS280に移行して当該転舵輪3の転舵を停止する。ブレーキ信号Sblkの入力がないときは次のステップに移行する。
【0060】
ステップS230では、転舵輪3にグリップが生じているか否かを判定する。具体的には、アシストモータ23の電流Imbが判定値HAよりも大きいか否かを判定する。電流Imbが判定値HAよりも大きいことは、第2シャフト11Bを回転させるために大きいトルクが必要とされていること、すなわち転舵輪3に負荷が加わっていることを意味する。したがって、この判定に基づいて、転舵輪3にグリップが生じていることを判定することが可能となる。すなわち、電流Imbが判定値HAよりも大きいとき、グリップがある旨を判定する。一方、電流Imbが判定値HA以下のとき、グリップがない旨判定する。
【0061】
ステップS240では、上記のグリップの有無判定によりグリップがある旨判定されたときは、ステップS250においてグリップありの表示をする。一方、グリップ判定によりグリップがない旨判定されるときは、次のステップS260に移行する。
【0062】
ステップS260では、転舵の操作量が総転舵角θttl以上であるか否かを判定する。すなわち、転舵輪3の転舵の全範囲においてグリップの検出が終了したか否かを判定する。この判定で肯定判定されたとき、次のステップS270に移行する。一方、転舵の操作量が総転舵角θttl未満のとき、ステップS210に戻り転舵輪3の転舵を続ける。
【0063】
操作量は、転舵を開始したときから判定時までの転舵輪3が回転した量を示す。
例えば、転舵輪3が、所定の転舵角θtxから最右転舵角θrmaxまで回転し、最右転舵角θrmaxから所定の転舵角θtyまで回転したとき、転舵の操作量は「最右転舵角θrmax−転舵角θtx」と「最右転舵角θrmax−転舵角θty」との和により与えられる。
【0064】
ステップS270では、ステップS260の肯定判定に基づいてグリップがない表示をする。すなわち、転舵輪3の転舵の全範囲においてアシストモータ23の電流Imbが判定値HA以上となるところがないとき、転舵輪3のグリップがない旨の表示をする。
【0065】
ステップS280では、ブレーキ信号Sblkがあること、グリップが検出されたこと、または転舵輪3の転舵の全範囲においてグリップが検出されなかったことのいずれかが成立するとき、転舵輪3の転舵を停止する。ステップS290では、第1シャフト11Aの固定を解除する。これにより、ステアリング2の操作が可能な状態に戻す。
【0066】
図5を参照して、自動操舵制御が実行されているときのアシストモータ23の電流Imbの推移について説明する。
時刻t0において、車両がスタックしたことに基づいてグリップ検出スイッチ49が押されたとき、自動操舵制御が実行される。このとき、転舵輪3が右回転方向に転舵する。このとき、転舵輪3にグリップがないため、アシストモータ23の電流Imbは、転舵輪3が路面等に接触しているときよりも小さい値となる。すなわち、アシストモータ23の電流Imbは判定値HAよりも小さい。
【0067】
時刻t1において、転舵角θtが最右転舵角θrmaxとなったとき、転舵方向を反転させる。その後、転舵輪3を左回転方向に転舵する。暫くの間、転舵輪3にグリップがないため、アシストモータ23の電流Imbは判定値HAよりも小さい。
【0068】
時刻t2において、転舵角θtが「0」となったとき、転舵輪3の方向は左側に向く。これ以降において暫くの間にわたって転舵輪3にグリップがないため、アシストモータ23の電流Imbは判定値HAよりも小さい。
【0069】
時刻t3において、転舵角θtが「所定角θtz」となったとき、転舵輪3に障害物があたることにより転舵輪3の回転のためにトルクが増大する。このため、アシストモータ23の電流Imbが増大し、電流Imbが判定値HAよりも大きくなる。このとき、転舵輪3の転舵が停止する。表示装置50にグリップがあった旨が表示される。
【0070】
(第1実施形態の効果)
本実施形態の電動パワーステアリング装置1の電子制御装置40によれば以下の効果が得られる。
【0071】
(1)本実施形態では、自動操舵制御により転舵輪3のグリップが発生した転舵角θtを検出する。この構成によれば、自動操舵制御により転舵輪3のグリップが発生した転舵角θtを検出するため、運転者が転舵輪3のグリップの発生を判断してスタックを解消するための動作を行なう構成と比較してスタックを解消するための動作が早期に開始される可能性が高くなる。すなわち、スタックの解消に対してより高く貢献することができる。
【0072】
(2)本実施形態では、転舵輪3のグリップが発生したとき自動操舵制御を停止する。
この構成によれば、転舵輪3のグリップが発生したとき自動操舵制御を停止するため、グリップのある転舵角θtで次の運転操作を行うことができる。このため、スタックの解消の可能性が高くなる。
【0073】
(3)本実施形態では、転舵輪3のグリップが発生したとき、転舵輪3のグリップが発生したことを報知する。このような報知がない場合は、運転者は次の運転操作をいつ開始すればよいか判断することができない。この点、上記構成によれば、転舵輪3のグリップのある旨を運転者に報知するため、スタックの解消に対し好適なタイミングで次の運転操作を行うことができる。
【0074】
(4)本実施形態では、自動操舵制御の実行中においてアシストモータ23の電流Imbが所定値以上のとき、転舵輪3のグリップが発生している旨を判定する。すなわち、転舵輪3のグリップの発生が反映されるアシストモータ23の電流Imbを用いてグリップのあるところを検出する。このため、転舵輪3のグリップを運転者のステアリング操作により検出する場合と比較して、グリップのあるところを精確に把握することができる。これにより、スタック解消の確度を高くすることができる。
【0075】
(5)本実施形態では、電動パワーステアリング装置1は、第1シャフト11Aに反力を付与する反力モータ21と、第2シャフト11Bにトルクを付与するアシストモータ23とを備える。この構成によれば、第1シャフト11Aの回転に対して独立して第2シャフト11Bを回転することが可能であるため、自動操舵制御中においてステアリング2を所定角度に維持することができる。
【0076】
(6)本実施形態では、転舵輪3のグリップが発生しているとき、反力モータ21の電流制御により第1シャフト11Aの操舵角θsと第2シャフト11Bの転舵角θt(すなわち、転舵輪3の転舵角θt)との差を小さくする。自動操舵制御によれば、第1シャフト11Aと第2シャフト11Bとが独立して回転するため、第1シャフト11Aの操舵角θsと第2シャフト11Bの転舵角θtとが一致しなくなる。このため、自動操舵制御により転舵輪3のグリップが生じるところを検出したときに車両を進行させると、運転者が予期しない方向に車両が進行する。この点、上記構成では、自動操舵制御により転舵輪3のグリップが生じるところを検出したとき、第1シャフト11Aの操舵角θsと第2シャフト11Bの転舵角θtとの差を小さくする。これにより、運転者が予期しない方向に車両が進行するといった事象を少なくすることができる。
【0077】
(7)本実施形態では、自動操舵制御の開始を要求するためのグリップ検出スイッチ49(自動制御要求装置)を備える。
スタックが生じたとき自動的に自動操舵制御を実行する構成としたとき、転舵輪3の転舵の開始は運転者にとっては不意な動作となる。この点、本発明では、自動操舵制御を開始するための自動操舵制御の開始操作を必要とする。すなわち、運転者の意思に基づいて自動操舵制御を開始する構成としているため、運転者に対して不意になる動作が少ない。
【0078】
(8)本実施形態では、自動操舵制御はブレーキ信号Sblkを検出したとき、転舵を停止し、その後、自動操舵制御を終了する。この構成によれば、運転者の意思により自動操舵制御を終了することができる。これにより、グリップが生じているか否かに拘わらず、転舵輪3の転舵を任意に止めることができる。
【0079】
<第2実施形態>
図6〜図8を参照して、第2実施形態について説明する。
本実施形態の電動パワーステアリング装置1は、一定の車速を維持する車速制御機能を備える車両に備えられる。そして、車速制御の実行中に自動操舵制御を行う。以下、第1実施形態の構成からの詳細な変更について説明する。なお、前記第1実施形態と共通する構成については同一の符合を付してその説明を省略する。
【0080】
車速制御について説明する。
車速制御は、アクセルペダルの操作に基づかずに車速を一定速度に維持する制御である。車両は一定速度で走行するため、運転者はステアリング操作のみに注力して車両を制御することができる。特に、舗装されていない道路を走行するとき、この車速制御が実行される。
【0081】
車速制御には、車速を一定速度に維持する定速度制御と、スタックを検出したときにスタックから脱出するための加速制御とが含まれる。
定速度制御は、車両の車速、加速度、および車両の姿勢等に基づいて、制御時よりも所定時間先の車速を推定し、スロットル開口度、噴射燃料、およびブレーキ操作を制御して車速を一定速度に維持する。
【0082】
加速制御は、定速度制御の実行中において、同制御における最大トルク以上のトルクが必要となるときに実行される。すなわち、舗装されていない道路を走行するとき、転舵輪3が雨水等により形成された窪みに嵌り込むことがある。このとき、定速度制御だけでは、スタックから脱出することは難しい。そこで、スタックを検出したときに、スタックが検出されなくなるまでの期間にわたって加速制御を実行して内燃機関の出力を増大する。これによって車両がスタックになったとき自動的にスタックを抜け出す。
【0083】
ところで、加速制御によってもスタックから抜け出せない場合がある。この場合、運転者が、ステアリング操作により転舵輪3のグリップのあるところを探し出す必要があるが、グリップのあるところを探し出すことは難しい。そこで、本実施形態では、車速制御中において、加速制御によっても脱出することのできないスタックにあるとき、本実施形態の自動操舵制御を実行する。
【0084】
図6を参照して、車速制御および自動操舵制御を実行するためのスイッチ類について説明する。これらスイッチ類の操作パネル110は、車両のシフトレバー210の横側に設けられている。
【0085】
操作パネル110には、車速制御の実行および停止を指令するための車速制御スイッチ120と、車速制御の車速を設定する車速制御ダイヤル130と、車速制御を停止した後に車速制御を再始動するための車速制御再始動スイッチ140と、自動操舵制御の実行および停止を指令するためのグリップ検出スイッチ150とが設けられている。操作パネル110には、これらのスイッチ類に加えて、グリップのありを示す第1表示装置160と、グリップのなしを示す第2表示装置170が設けられている。
【0086】
車速制御スイッチ120が押されることにより車速制御スイッチ120は「オン状態」に移行する。車速制御スイッチ120がオン状態にあるとき、同スイッチが押されたとき車速制御スイッチ120は「オフ状態」に移行する。
【0087】
図7を参照して、車両の制御装置が実行する「車速制御」の一例について説明する。なお同処理は、車速制御スイッチ120がオン状態になっている期間、電子制御装置40により所定の演算周期毎に繰り返し実行される。
【0088】
ステップS300において、車両がスタックしているか否かが判定される。
車両のスタックは、例えば、車速と転舵輪3の回転数との関係に基づいて判定する。
具体的には、転舵輪3の回転数に基づいて転舵輪3の回転数に対応する車速(以下、「演算車速」)を演算し、この演算車速と車速Vとの差が基準値よりも大きいとき、スタックと判定する。
【0089】
ステップS300においてスタックでない旨判定されるとき、定速度制御を維持する(ステップS301)。ステップS300においてスタックである旨判定されるとき、次のステップS310に移行する。ステップS310では定速度制御を停止する。
【0090】
ステップS311では、第1回目の加速制御が実行済みか否かを判定する。第1回目の加速制御済みではないとき、すなわちスタックを検出した後、加速制御を行っていないとき、ステップS312において加速制御を実行する。これにより、スタックからの脱出を試みる。一方、ステップS311において、第1回目の加速制御が実行済みである旨判定されたとき、次のステップS320に移行する。
【0091】
ステップS320において第2回目の加速制御が実行済みであるか否かを判定する。ここで否定判定されるとき、すなわち、第1回目の加速制御を実行したこと、かつスタックであるとき、ステップS321に移行する。
【0092】
ステップS321では、自動操舵制御を実行する。すなわち、転舵輪3を転舵して、グリップのあるところを探し出す。自動操舵制御により、グリップが検出されたとき(ステップS322:YES)、ステップS323に移行する。すなわち、グリップのあるところで加速制御を実行する。一方、自動操舵制御により、グリップが検出されなかったとき、同フローが終了する。
【0093】
一方、ステップS320において、肯定判定されるとき、すなわち、車両がスタックであり、かつ第2回目の加速制御を実行済みである旨判定されるとき、ステップS330に移行する。
【0094】
ステップ330では、第3回目の加速制御が実行済みであるか否かを判定する。ここで否定判定されるとき、すなわち、第2回目の加速制御を実行したこと、かつスタックであるとき、ステップS331に移行する。ステップS331〜ステップS333の処理は、ステップS321以降の処理と同様である。すなわち、自動操舵制御を実行し、グリップがあるときには加速制御を実行して、スタックからの脱出を試みる。
【0095】
ステップ330において、肯定判定されるとき、すなわち、第3回目の加速制御を実行したこと、かつスタックであるとき、ステップS334において操作パネル110のスタックである旨を表示する。これにより、加速制御および自動操舵制御によってもスタックから脱出することができない旨を運転者に報知する。
【0096】
図8を参照して、車速制御中において実行される「自動操舵制御」について説明する。
ステップS410において、車両制御装置200から車両がスタックにあるか否かの情報を取得して、スタックか否かを判定する。車両がスタックにないときは、同処理は終了する。
【0097】
ステップS420において、グリップ検出スイッチ150がオン状態か否かについて判定する。この判定処理は所定期間にわたって実行される。すなわち、車両制御装置200がスタックと判定してから運転者がグリップ検出スイッチ150を押すまでに所定時間を要するため、所定期間にわたって入力待機状態とすることにより、グリップ検出スイッチ150を押す機会を確保している。
【0098】
この判定が否定されるとき、すなわちグリップ検出スイッチ150が押されなかったとき、同処理は終了する。一方、グリップ検出スイッチ150が「オン状態」になっている旨判定されるとき、次のステップに移行する。
【0099】
ステップS430、すなわちグリップ検出スイッチ150が「オン状態」のとき、スロットル制御を禁止する旨のスロットル制御禁止信号を出力する。
ステップS440、すなわちスロットル制御禁止信号を出力したあと、「グリップ検出制御」を実行する。この「グリップ検出制御」は、第1実施形態と同様の「グリップ検出制御」である。ステップS450、すなわち「グリップ検出制御」の終了後、スロットル制御の禁止を解除する旨の信号を出力する。
【0100】
(第2実施形態の効果)
本実施形態の電動パワーステアリング装置1の電子制御装置40によれば、先の第1実施形態による前記(1)〜(8)の効果に加えて、さらに以下に示す効果を奏することができる。
【0101】
(9)本実施形態では、加速制御後にスタックにある旨判定されているとき、かつグリップ検出スイッチ150がオン状態にされているとき、自動操舵制御を実行する。
この構成によれば、車速制御の実行中において、(A)少なくとも1回、加速制御が実行された後において車両がスタックにあること、(B)グリップ検出スイッチ150がオン状態にされたことを条件として、自動操舵制御を実行する。すなわち、スタックが検出されたとき、自動操舵制御を実行する前に、加速制御によるスタックの解消が実行される。このため、スタックが検出された最初の時期に自動操舵制御を実行する場合と比べて、スタックの解消を迅速に行うことができる。
【0102】
(その他の実施形態)
本発明の実施態様は上記各実施形態に例示した態様に限られるものではなく、例えば以下のように変更することもできる。また以下の各変形例は、上記実施形態についてのみ適用されるものではなく、異なる変形例同士を互いに組み合わせて実施してもよい。
【0103】
・第1実施形態では、グリップ検出スイッチ49がオン状態になっているときグリップ検出制御を実行するが、これに代えて次の構成としてもよい。すなわち、スタックを検出したとき、運転者にグリップの検出の旨を報知し、その後、グリップ検出制御を自動的に実行する。この場合、グリップ検出スイッチ49を押す操作を行わなくてもグリップ検出制御が行われる。
【0104】
・第1実施形態では、自動操舵制御を実行するとき、スロットル制御を禁止するが、これに代えて、次の構成としてもよい。例えば、自動操舵制御を実行するとき、スロットルを所定開度までは制御可能とし、かつ所定開度以上にスロットルが開かないように制御する。これにより、自動操舵制御においても内燃機関の出力を所定値までは維持することができるため、傾斜しているところに車両があるとき車両の姿勢を安定することが可能となる。
【0105】
・第1実施形態では、スタックがあることを条件としてグリップ検出制御を実行しているが、このような条件を省略することもできる。すなわち、グリップ検出スイッチ49がオン状態になることのみを条件として、グリップ検出制御を実行する構成としてもよい。この場合、電子制御装置40によりスタックと判定されない状態のとき、運転者がスタックにあると判断する場合、例えば、転舵輪3のスリップが発生している状態において、自動操舵制御を実行することができる。
【0106】
・第1実施形態では、転舵輪3のグリップが発生しているか否かを判定するためのパラメータ(以下、「グリップパラメータ」)として、アシストモータ23の電流Imbを用いている。これに対し、グリップパラメータとして、例えば転舵輪3の回転速度の時間変化率、アシストモータ23の電圧、反力モータ21の電流Imaを用いることができる。これらのパラメータは、いずれも、転舵輪3が障害物にあたったとき転舵輪3の回転が制限されることにより、その値が変化するパラメータである。このため、このようなパラメータを採用することによっても、第1実施形態と同様の効果を得ることができる。
【0107】
・第1実施形態では、グリップの検出の有無を表示装置50(報知装置)により運転者に報知しているが、グリップの検出の結果を報知する手段はこれに限定されない。例えば、報知音、ステアリング2の振動等により、グリップの検出の有無を運転者に報知することができる。
【0108】
・第1実施形態では、グリップが検出されたとき転舵輪3の転舵を停止するが、これに代えて、転舵輪3の転舵を維持してもよい。例えば、グリップが解消されない程度のトルクが発生するように、アシストモータ23の電流Imbを制御する。この制御によれば、転舵輪3と障害物とを所定の力以上で接触し続けることにより転舵の停止に伴うグリップの低下を抑制することができるため、スタックの解消の可能性を高くすることができる。
【0109】
・第1実施形態では、ブレーキペダル48の操作により生じるブレーキ信号Sblkに基づいて転舵を停止し、その後、自動操舵制御を終了するが、これを次のように変更することもできる。例えば、ブレーキペダル48の操作に代えて、パーキングブレーキの操作に基づいて自動操舵制御を終了してもよい。すなわち、転舵輪3の回転速度を低下させる要求に基づいて転舵輪3の回転速度を低下させる装置(速度低下要求装置)であれば、これらの装置の動作信号に基づいて転舵を停止してもよく、上記(8)の効果と同様の効果を得ることができる。
【0110】
・第1実施形態では、反力モータ21と回転比変更機構30とを備える電動パワーステアリング装置1に自動操舵制御を適用しているが、自動操舵制御は他の形態の電動パワーステアリング装置にも適用することができる。例えば、反力モータ21のない電動パワーステアリング装置、ステアリング2の回転動力がワイヤを介して転舵輪3に伝達される所謂ステアバイワイヤ型の電動パワーステアリング装置に、自動操舵制御を適用することができる。
【0111】
・第2実施形態では、車速制御を備える車両について自動操舵制御を適用しているが、車速制御の制御フローは同実施形態に挙げたフローに限定されない。例えば、同実施形態のように所謂オフロードに適用される車速制御に対して自動操舵制御が適用されているが、高速運転時における車速制御を実行する車両に対しても自動操舵制御を適用することも可能である。
【符号の説明】
【0112】
1…電動パワーステアリング装置、2…ステアリング、3…転舵輪、10…操舵角伝達機構、11…ステアリングシャフト、12…ラックアンドピニオン機構、13…ラックシャフト、14…タイロッド、11A…第1シャフト、11B…第2シャフト、11C…第3シャフト、11D…第4シャフト、20…EPSアクチュエータ、21…反力モータ、22…ギア機構、23…アシストモータ、30…回転比変更機構、30A…遊星歯車機構、31…第1太陽歯車、32…第2太陽歯車、33…第1遊星軸、34…第2遊星軸、33A…第1遊星歯車、33B…第2遊星歯車、34A…第3遊星歯車、34B…第4遊星歯車、35…キャリア、35A…伝達ギア、40…電子制御装置、41…トルクセンサ、42…操舵角センサ、43…転舵角センサ、44…第1電流センサ、45…第2電流センサ、46…車速センサ、47…ヨーレートセンサ、48…ブレーキペダル、49…グリップ検出スイッチ、50…表示装置、110…操作パネル、120…車速制御スイッチ、130…車速制御ダイヤル、140…車速制御再始動スイッチ、150…グリップ検出スイッチ、160…第1表示装置、170…第2表示装置、200…車両制御装置、210…シフトレバー。
【技術分野】
【0001】
本発明は、電動モータの電流制御により転舵輪の転舵角を変更する自動操舵制御を行なう電動パワーステアリング装置の制御装置に関する。
【背景技術】
【0002】
従来の電動パワーステアリング装置として、特許文献1に記載の技術が知られている。
特許文献1に記載の電動パワーステアリング装置の制御装置は、車両がスタックしたとき、運転者のアクセルペダルの操作に応じて転舵輪の転舵角を変更する。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006−306205号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の制御装置は、転舵輪のグリップが発生しているか否かに関係なく、予めプログラムされた内容に従い転舵輪の転舵角を変更するため、一度は発生した転舵輪のグリップが再びグリップしていない状態に遷移するおそれがある。この場合には、スタックの解消が遅延する。
【0005】
本発明はこのような実情に鑑みてなされたものでありその目的は、スタックの解消に対してより高く貢献することのできる電動パワーステアリング装置の制御装置を提供することにある。
【課題を解決するための手段】
【0006】
以下、上記目的を達成するための手段を以下に記載する。
(1)第1の手段は、請求項1に記載の事項すなわち、「電動モータの電流制御により転舵輪の転舵角を変更する自動操舵制御を行なう電動パワーステアリング装置の制御装置において、前記自動操舵制御により前記転舵輪のグリップが発生した転舵角を検出すること」を要旨とする。
【0007】
この発明によれば、自動操舵制御により転舵輪のグリップが発生した転舵角を検出するため、運転者が転舵輪のグリップの発生を判断してスタックを解消するための動作を行なう構成と比較して、スタックを解消するための動作が早期に開始される可能性が高くなる。すなわち、スタックの解消に対してより高く貢献することができる。
【0008】
(2)第2の手段は、請求項2に記載の事項すなわち、「請求項1に記載の電動パワーステアリング装置の制御装置において、前記転舵輪のグリップが発生したとき、前記自動操舵制御を停止すること」を要旨とする。
【0009】
この発明によれば、転舵輪のグリップが発生したとき自動操舵制御を停止するため、グリップのあるところで次の運転操作を行うことができる。このため、スタックの解消の可能性が高くなる。
【0010】
(3)第3の手段は、請求項3に記載の事項すなわち、「請求項1または2に記載の電動パワーステアリング装置の制御装置において、前記転舵輪のグリップが発生したとき、前記転舵輪のグリップが発生したことを報知するための報知装置を作動させること」を要旨とする。
【0011】
このような報知がない場合は、運転者は次の運転操作をいつ開始すればよいか判断することができない。この点、本発明によれば、転舵輪のグリップが発生したことを運転者に報知するため、スタックの解消に対し好適なタイミングで次の運転操作を行うことができる。
【0012】
(4)第4の手段は、請求項4に記載の事項すなわち、「請求項1〜3のいずれか一項に記載される電動パワーステアリング装置の制御装置において、前記転舵輪のグリップの発生が反映される前記電動モータのパラメータをグリップパラメータとして、前記自動操舵制御の実行中かつ前記グリップパラメータが所定値以上のとき、前記転舵輪のグリップが発生している旨判定すること」を要旨とする。
【0013】
この発明によれば、転舵輪のグリップの発生が反映される電動モータのグリップパラメータを用いてグリップのあるところを検出する。このため、転舵輪のグリップを運転者のステアリング操作により検出する場合と比較して、グリップのあるところを精確に把握することができる。これにより、スタック解消の確度を高くすることができる。
【0014】
(5)第5の手段は、請求項5に記載の事項すなわち、「請求項1〜4のいずれか一項に記載される電動パワーステアリング装置の制御装置において、前記電動パワーステアリング装置は、ステアリングと一体的に回転する第1シャフトと、この第1シャフトに反力を付与する反力モータと、ラックシャフトに連動して回転する第2シャフトと、この第2シャフトにトルクを付与するアシストモータとしての前記電動モータとを含むこと」を要旨とする。
【0015】
この発明によれば、ステアリングの回転に独立して第2シャフトを回転することが可能であるため、自動操舵制御中にステアリングを所定角度に維持することが可能である。すなわち、自動操舵制御中においても運転者はステアリングを所定角度で把持することができる。
【0016】
(6)第6の手段は、請求項6に記載の事項すなわち、「請求項5に記載の電動パワーステアリング装置の制御装置において、前記転舵輪のグリップが発生しているとき、前記反力モータの電流制御により前記第1シャフトの操舵角と前記転舵輪の転舵角との差を小さくすること」を要旨とする。
【0017】
自動操舵制御によれば、第1シャフトと第2シャフトとが独立して回転するため、ステアリングシャフトの角度と第2シャフトの角度とが一致しなくなる。このため、自動操舵制御により転舵輪のグリップが生じるところを検出したときに車両を進行させると、運転者が予期しない方向に車両が進行する。この点、本発明では、自動操舵制御により転舵輪のグリップが生じるところを検出したとき、第1シャフトの操舵角と転舵輪の転舵角との差を小さくする。これにより、運転者が予期しない方向に車両が進行するといった事象を少なくすることができる。
【0018】
(7)第7の手段は、請求項7に記載の事項すなわち、「請求項1〜6のいずれか一項に記載される電動パワーステアリング装置の制御装置において、前記自動操舵制御の開始を要求する自動制御要求装置を含むこと」を要旨とする。
【0019】
スタックが生じたとき自動操舵制御が自動的に実行する構成としたとき、転舵輪の動作が運転者にとっては不意な動作となる。この点、本発明では、自動操舵制御を開始するための自動操舵制御の開始操作を必要とする。すなわち、運転者の意思に基づいて自動操舵制御を開始する構成としているため、運転者に対して不意となる動作が少ない。
【0020】
(8)第8の手段は、請求項8に記載の事項すなわち、「請求項1〜7のいずれか一項に記載される電動パワーステアリング装置の制御装置において、前記自動操舵制御は前記転舵輪の回転速度を低下させる要求を入力するための速度低下要求装置が操作されたことを示す操作信号を検出したとき、本制御を終了するものであること」を要旨とする。
【0021】
この発明によれば、速度低下要求装置の操作信号に基づいて自動操舵制御が終了するため、運転者の意思により自動操舵制御を終了することが可能である。これにより、グリップが生じているか否かに拘わらず、転舵輪の転舵を任意に止めることができる。
【発明の効果】
【0022】
本発明によれば、スタックの解消に対してより高く貢献することのできる電動パワーステアリング装置の制御装置を提供することができる。
【図面の簡単な説明】
【0023】
【図1】本発明の一実施形態の電動パワーステアリング装置について、その全体構造を模式的に示す模式図。
【図2】同実施形態の電動パワーステアリング装置について、その回転比変更機構の断面構造を示す断面図。
【図3】同実施形態の電動パワーステアリング装置について、電子制御装置により実行される「自動操舵制御」の手順を示すフローチャート。
【図4】同実施形態の電動パワーステアリング装置について、電子制御装置により実行される「グリップ検出制御」の手順を示すフローチャート。
【図5】同実施形態の電動パワーステアリング装置について、(a)はアシストモータの電流の時間変化を示すグラフ、(b)は転舵角の時間変化を示すグラフ。
【図6】第2実施形態の電動パワーステアリング装置について、操作パネルの平面構造を示す平面図。
【図7】同実施形態の電動パワーステアリング装置について、電子制御装置により実行される「車速制御」の手順を示すフローチャート。
【図8】同実施形態の電動パワーステアリング装置について、電子制御装置により実行される「自動操舵制御」の手順を示すフローチャート。
【発明を実施するための形態】
【0024】
<第1実施形態>
図1に示すように、電動パワーステアリング装置1は、ステアリング2の回転を転舵輪3に伝達する操舵角伝達機構10と、ステアリング2の操作を補助するための力(以下、「アシスト力」)を操舵角伝達機構10に付与するEPSアクチュエータ20と、EPSアクチュエータ20を制御する電子制御装置(制御装置)40とを備える。さらに、電動パワーステアリング装置1には、これら装置の動作状態を検出する複数のセンサが設けられている。
【0025】
操舵角伝達機構10は、ステアリング2の操作に応じて回転するステアリングシャフト11と、ステアリングシャフト11の回転をラックシャフト13に伝達するラックアンドピニオン機構12と、タイロッド14を操作するラックシャフト13と、ナックルを操作するタイロッド14とを備える。操舵角伝達機構10はステアリング2の操作によりこれらの機構を介して転舵輪3の方向を変更する。
【0026】
ステアリングシャフト11は、4つのシャフト、すなわち第1シャフト11A、第2シャフト11B、第3シャフト11C、および第4シャフト11Dを備えている。第1シャフト11Aはステアリング2に接続されている。第2シャフト11Bは第1シャフト11Aの回転動力を第3シャフト11Cに伝達する。第3シャフト11Cは、第2シャフト11Bと第4シャフト11Dとの間に設けられて第2シャフト11Bの回転動力を第4シャフト11Dに伝達する。第4シャフト11Dは、ラックアンドピニオン機構12に回転動力を伝達する。
【0027】
EPSアクチュエータ20は、第1シャフト11Aにトルクを付与する反力モータ21と、反力モータ21の回転動力を第1シャフト11Aに伝達するギア機構22と、第1シャフト11Aの回転動力を第2シャフト11Bに伝達する回転比変更機構30とを備えている。反力モータ21から第1シャフト11Aに付与されるトルクはステアリング2の回転に対する反力として作用する。
【0028】
図2を参照して、回転比変更機構30について説明する。
回転比変更機構30は、第1シャフト11Aを太陽軸とする遊星歯車機構30Aと、遊星歯車機構30Aのキャリア35を駆動するアシストモータ23とを備えている。
【0029】
遊星歯車機構30Aは、第1シャフト11Aと同軸に設けられた第1太陽歯車31と、第2シャフト11Bと同軸に設けられた第2太陽歯車32と、第1太陽歯車31および第2太陽歯車32の周囲を回転する第1遊星軸33および第2遊星軸34と、第1遊星軸33および第2遊星軸34に接触するキャリア35とを備えている。
【0030】
遊星歯車機構30Aは、これらの構成要素に加えて、第1遊星軸33に設けられた第1遊星歯車33Aおよび第2遊星歯車33Bと、第2遊星軸34に設けられた第3遊星歯車34Aおよび第4遊星歯車34Bとを備えている。第1遊星歯車33Aは第1太陽歯車31と噛み合う。第2遊星歯車33Bは第2太陽歯車32と噛み合う。第3遊星歯車34Aは第1太陽歯車31と噛み合う。第4遊星歯車34Bは第2太陽歯車32と噛み合う。
【0031】
アシストモータ23の回転動力は、キャリア35の外周に設けられた伝達ギア35Aを介して回転比変更機構30に伝達される。具体的には、アシストモータ23により次のようにキャリア35の回転を制御することにより、第1シャフト11Aの回転動力を増大または減少させて第2シャフト11Bに伝達する。
【0032】
アシストモータ23は次のように動作する。
(A)キャリア35の回転速度を第1シャフト11Aの回転速度と等しくすることにより、第1シャフト11Aの回転速度と第2シャフト11Bの回転速度とを等しくする。
【0033】
(B)キャリア35の回転速度を第1シャフト11Aの回転速度よりも大きくすることにより、第2シャフト11Bの回転速度を第1シャフト11Aの回転速度よりも小さくする。
【0034】
(C)キャリア35の回転速度を第1シャフト11Aの回転速度よりも小さくすることにより、第2シャフト11Bの回転速度を第1シャフト11Aの回転速度よりも大きくする。
【0035】
電動パワーステアリング装置1には、ステアリング2のトルクを検出するトルクセンサ41と、第1シャフト11Aの回転量を検出する操舵角センサ42と、第2シャフト11Bの回転量を検出する転舵角センサ43とが設けられている。また、同装置1には、反力モータ21の電流(以下、「Ima」)を測定する第1電流センサ44と、アシストモータ23の電流(以下、「Imb」)を測定する第2電流センサ45とが設けられている。
【0036】
電動パワーステアリング装置1には、これらのセンサに加えて、転舵輪3のグリップを検出するためのグリップ検出スイッチ49と、転舵輪3のグリップの有無を報知する表示装置50とが設けられている。
【0037】
また、これらの装置に加えて、電動パワーステアリング装置1には、車速に対応する値を検出する車速センサ46からの信号を受信する入力ポートと、車両の回転に対応する値を検出するヨーレートセンサ47からの信号を受信する入力ポートと、車両のブレーキペダル48からのブレーキ信号Sblkを受信する入力ポートとが設けられている。
【0038】
また、電動パワーステアリング装置1には、車両の内燃機関を制御する車両制御装置200からの情報を受信し、かつ電動パワーステアリング装置1からの情報を送信するための送受信ポートが設けられている。電動パワーステアリング装置1から出力する情報としてはアクセル操作に関する情報が含まれる。
【0039】
電動パワーステアリング装置1に設けられた各センサは、検出対象の状態変化に応じた信号を出力する。
トルクセンサ41は、ステアリング2の操作によりステアリングシャフト11に付与されたトルクの大きさに応じた信号(以下、「出力信号SA」)を電子制御装置40に出力する。操舵角センサ42は、第1シャフト11Aの回転量に応じた信号(以下、「出力信号SB」)を電子制御装置40に出力する。転舵角センサ43は、第2シャフト11Bの回転量に応じた信号(以下、「出力信号SC」)を電子制御装置40に出力する。車速センサ46は、転舵輪3の回転速度に応じた信号(以下、「出力信号SD」)を電子制御装置40に出力する。ヨーレートセンサ47は、車両の回転に応じた信号(以下、「出力信号SE」)を電子制御装置40に出力する。
【0040】
電子制御装置40は、各センサの出力に基づいて次の演算を行う。
トルクセンサ41の出力信号SAに基づいて、ステアリング2の操作にともない第1シャフト11Aに入力されたトルクの大きさに相当する演算値(以下、「操舵トルクτ」)を算出する。操舵角センサ42の出力信号SBに基づいてステアリング2の操舵角θsを算出する。転舵角センサ43の出力信号SCに基づいて転舵輪3の回転量に対応する転舵角θtを算出する。車速センサ46の出力信号SDに基づいて、車両の走行速度に相当する演算値(以下「車速V」)を算出する。ヨーレートセンサ47の出力信号SEに基づいて、車両の回転速度に相当する演算値(以下「ヨーレートγ」)を算出する。
【0041】
グリップ検出スイッチ49は、自動操舵制御を開始およびその実行を停止するためのスイッチである。グリップ検出スイッチ49は「オン状態」と「オフ状態」との2つの状態を有する。「オン状態」のときグリップ検出スイッチ49は点灯する。一方、「オフ状態」のときグリップ検出スイッチ49は消灯する。
【0042】
グリップ検出スイッチ49が「オフ状態」のときに、グリップ検出スイッチ49が押されたとき「オン状態」に切り替わる。グリップ検出スイッチ49が「オン状態」のときに、グリップ検出スイッチ49が押されたとき「オフ状態」に切り替わる。
【0043】
表示装置50は、転舵輪3のグリップがあることを検出したこと、および転舵輪3のグリップがあるところを検出しなかったことを表示する。表示装置50は、車両のフロントパネル等、運転者が運転中に視認することができる場所に設けられている。
【0044】
次に、電動パワーステアリング装置1の動作を説明する。
ステアリング2が操作されるとき、反力モータ21の力が第1シャフト11Aに付与されて、回転方向と反対の力(以下、「反力」)が与えられる。第1シャフト11Aに付与される力が反力よりも大きくなるときステアリング2が回転する。ステアリング2の回転動力は、第1シャフト11Aから回転比変更機構30を介して第2シャフト11Bに伝達される。第2シャフト11Bの回転動力は第3シャフト11Cを介して第4シャフト11Dに伝達され、ラックアンドピニオン機構12によりラックシャフト13の直線運動に変換される。ラックシャフト13の直線運動は、同ラックシャフト13の両端に連結されたタイロッド14を介してナックルに伝達される。そして、ナックルの動作にともない転舵輪3の舵角が変更される。
【0045】
ステアリング2の操舵状態について説明する。
ステアリング2の操舵角θsは、ステアリング2が中立位置にあるときを基準として定められる。すなわち、ステアリング2が中立位置にあるときの操舵角θsを「0」として、ステアリング2が中立位置から右方向または左方向に回転したとき、中立位置からの回転角度に応じて操舵角θsが増加する。
【0046】
転舵輪3の転舵角θtについて説明する。
転舵輪3は、右回転方向に右最大角度まで回転し、また、左回転方向に左最大角度まで回転する。転舵輪3が車両の進行方向に向いているときの転舵角θtを「0」として、転舵輪3が右最大角度まで回転したときの転舵角θtを「最右転舵角θrmax」とし、転舵輪3が左最大角度まで回転したときの転舵角θtを「最左転舵角θlmax」とする。
【0047】
転舵輪3の全範囲にわたる回転に対応する転舵角θtを「総転舵角θttl」とする。総転舵角θttlは次のように与えられる。すなわち、総転舵角θttlは、転舵輪3が所定の転舵角θtxから最右転舵角θrmaxまで回転し、最右転舵角θrmaxから最左転舵角θlmaxまで回転し、最左転舵角θlmaxから元の所定転舵角θtxまで回転するときの回転量とする。具体的には、総転舵角θttlは「(最右転舵角θrmax+最左転舵角θlmax)×2」で与えられる。
【0048】
電動パワーステアリング装置1の動作モードについて説明する。
動作モードには、通常モードと、アクティブモードと、グリップ検出モードとがある。
通常モードのとき、第1シャフト11Aの回転速度に対する第2シャフト11Bの回転速度の比(以下、「回転速度比」)は「1」に固定される。このモードは、車両の通常の走行時において実行される。すなわち、オーバステアまたはスタック等の特定のモードが生じない限りにおいて実行される。
【0049】
アクティブモードのとき、運転状況により回転速度比が随時変更される。例えば、ヨーレートγ等の値に基づいてステアリングシャフト11の操作がオーバステアと判定されるとき、回転速度比を変更することにより、第1シャフト11Aの回転方向とは反対方向に第2シャフト11Bを回転させる。
【0050】
グリップ検出モードのとき、第1シャフト11Aが固定された状態で、キャリア35が回転する。すなわち、第1シャフト11Aの回転とは独立して、キャリア35の回転により第2シャフト11Bが回転する。なお、第1シャフト11Aの固定は、操舵トルクτに基づいて第1シャフト11Aに加わる力を算出し、この力と反対方向の力を反力モータ21により付与することにより、実現される。
【0051】
グリップ検出モードは、車両の転舵輪3が溝に嵌まり込んで転舵輪3が空転する状態になったとき、転舵輪3のグリップが生じるところを検出するために用いられる。
従来では、運転者がステアリング2の操作を行ってグリップのあるところを運転者のステアリング操作により把握していたが、グリップがあることを手動の操舵で把握することは難しい。そこで、自動操舵制御を実行して転舵輪3のグリップが生じるところを検出する。
【0052】
図3を参照して、電子制御装置40が実行する「自動操舵制御」について説明する。なお同処理は、電子制御装置40により所定の演算周期毎に繰り返し実行される。
ステップS110において、グリップ検出スイッチ49がオン状態か否かについて判定する。この判定が否定されるときは、同処理が終了する。一方、グリップ検出スイッチ49が「オン状態」になっている旨判定されるとき、次のステップに移行する。すなわち、車両がスタックであると運転者が判断してグリップ検出スイッチ49を押すことにより、自動操舵制御が実行される。
【0053】
ステップS120、すなわちグリップ検出スイッチ49が「オン状態」のとき、スロットル制御を禁止する旨の信号(以下、「スロットル制御禁止信号」)を出力する。スロットル制御禁止信号は、仮にアクセルが踏まれたとき、車両のスロットル(吸気弁)の開度が増大しない制御を車両制御装置200に要求するものである。これにより、自動操舵制御が実行されるとき、転舵輪3が車軸周りで回転することを禁止し、グリップの検出と同時に車両が動き出すことを抑制する。
【0054】
ステップS130、すなわちスロットル制御禁止信号を出力したあと、「グリップ検出制御」を実行する。この制御においては、転舵輪3を操舵してグリップの生じるところを検出する。グリップが検出されたときは、運転者にグリップを検出した旨を報知する。
【0055】
ステップS140、すなわち「グリップ検出制御」の終了後、スロットル制御の禁止を解除する旨の信号を出力する。これにより、スロットルの開度制御が禁止されている状態からスロットルの開度制御を行うことが可能な状態に戻される。
【0056】
図4を参照して、「グリップ検出制御」について説明する。
ステップS200では、反力モータ21により第1シャフト11Aの回転を固定する。
これにより、転舵輪3を転舵させるためにキャリア35を回転させることに伴い第1シャフト11Aが回転することを抑制する。
【0057】
ステップS210では、転舵輪3を回転する。すなわち、アシストモータ23により第2シャフト11Bを回転して、転舵輪3を所定方向に転舵する。
例えば、転舵角θtが「0」にあるとき、転舵角θtを「0」から「最右転舵角θrmax」まで変化させる。続いて、転舵角θtを「最右転舵角θrmax」から「最左転舵角θlmax」まで変化させる。更に、転舵角θtを「最左転舵角θlmax」から「0」まで変化させる。
【0058】
転舵角θtを変化させるとき、目標転舵角θtaを設定し、転舵角θtが目標転舵角θtaと一致するように第2シャフト11Bを回転させる。目標転舵角θtaは、転舵開始からの経過時間に応じて変化させる。目標転舵角θtaと転舵角θtとの間に乖離が大きくなるとき、アシストモータ23に供給する電流Imbを大きくし、これにより第2シャフト11Bのトルクを大きくする。
【0059】
ステップS220では、転舵輪3の転舵中にブレーキ信号Sblkの有無を検出する。ブレーキ信号Sblkがあるとき、ステップS280に移行して当該転舵輪3の転舵を停止する。ブレーキ信号Sblkの入力がないときは次のステップに移行する。
【0060】
ステップS230では、転舵輪3にグリップが生じているか否かを判定する。具体的には、アシストモータ23の電流Imbが判定値HAよりも大きいか否かを判定する。電流Imbが判定値HAよりも大きいことは、第2シャフト11Bを回転させるために大きいトルクが必要とされていること、すなわち転舵輪3に負荷が加わっていることを意味する。したがって、この判定に基づいて、転舵輪3にグリップが生じていることを判定することが可能となる。すなわち、電流Imbが判定値HAよりも大きいとき、グリップがある旨を判定する。一方、電流Imbが判定値HA以下のとき、グリップがない旨判定する。
【0061】
ステップS240では、上記のグリップの有無判定によりグリップがある旨判定されたときは、ステップS250においてグリップありの表示をする。一方、グリップ判定によりグリップがない旨判定されるときは、次のステップS260に移行する。
【0062】
ステップS260では、転舵の操作量が総転舵角θttl以上であるか否かを判定する。すなわち、転舵輪3の転舵の全範囲においてグリップの検出が終了したか否かを判定する。この判定で肯定判定されたとき、次のステップS270に移行する。一方、転舵の操作量が総転舵角θttl未満のとき、ステップS210に戻り転舵輪3の転舵を続ける。
【0063】
操作量は、転舵を開始したときから判定時までの転舵輪3が回転した量を示す。
例えば、転舵輪3が、所定の転舵角θtxから最右転舵角θrmaxまで回転し、最右転舵角θrmaxから所定の転舵角θtyまで回転したとき、転舵の操作量は「最右転舵角θrmax−転舵角θtx」と「最右転舵角θrmax−転舵角θty」との和により与えられる。
【0064】
ステップS270では、ステップS260の肯定判定に基づいてグリップがない表示をする。すなわち、転舵輪3の転舵の全範囲においてアシストモータ23の電流Imbが判定値HA以上となるところがないとき、転舵輪3のグリップがない旨の表示をする。
【0065】
ステップS280では、ブレーキ信号Sblkがあること、グリップが検出されたこと、または転舵輪3の転舵の全範囲においてグリップが検出されなかったことのいずれかが成立するとき、転舵輪3の転舵を停止する。ステップS290では、第1シャフト11Aの固定を解除する。これにより、ステアリング2の操作が可能な状態に戻す。
【0066】
図5を参照して、自動操舵制御が実行されているときのアシストモータ23の電流Imbの推移について説明する。
時刻t0において、車両がスタックしたことに基づいてグリップ検出スイッチ49が押されたとき、自動操舵制御が実行される。このとき、転舵輪3が右回転方向に転舵する。このとき、転舵輪3にグリップがないため、アシストモータ23の電流Imbは、転舵輪3が路面等に接触しているときよりも小さい値となる。すなわち、アシストモータ23の電流Imbは判定値HAよりも小さい。
【0067】
時刻t1において、転舵角θtが最右転舵角θrmaxとなったとき、転舵方向を反転させる。その後、転舵輪3を左回転方向に転舵する。暫くの間、転舵輪3にグリップがないため、アシストモータ23の電流Imbは判定値HAよりも小さい。
【0068】
時刻t2において、転舵角θtが「0」となったとき、転舵輪3の方向は左側に向く。これ以降において暫くの間にわたって転舵輪3にグリップがないため、アシストモータ23の電流Imbは判定値HAよりも小さい。
【0069】
時刻t3において、転舵角θtが「所定角θtz」となったとき、転舵輪3に障害物があたることにより転舵輪3の回転のためにトルクが増大する。このため、アシストモータ23の電流Imbが増大し、電流Imbが判定値HAよりも大きくなる。このとき、転舵輪3の転舵が停止する。表示装置50にグリップがあった旨が表示される。
【0070】
(第1実施形態の効果)
本実施形態の電動パワーステアリング装置1の電子制御装置40によれば以下の効果が得られる。
【0071】
(1)本実施形態では、自動操舵制御により転舵輪3のグリップが発生した転舵角θtを検出する。この構成によれば、自動操舵制御により転舵輪3のグリップが発生した転舵角θtを検出するため、運転者が転舵輪3のグリップの発生を判断してスタックを解消するための動作を行なう構成と比較してスタックを解消するための動作が早期に開始される可能性が高くなる。すなわち、スタックの解消に対してより高く貢献することができる。
【0072】
(2)本実施形態では、転舵輪3のグリップが発生したとき自動操舵制御を停止する。
この構成によれば、転舵輪3のグリップが発生したとき自動操舵制御を停止するため、グリップのある転舵角θtで次の運転操作を行うことができる。このため、スタックの解消の可能性が高くなる。
【0073】
(3)本実施形態では、転舵輪3のグリップが発生したとき、転舵輪3のグリップが発生したことを報知する。このような報知がない場合は、運転者は次の運転操作をいつ開始すればよいか判断することができない。この点、上記構成によれば、転舵輪3のグリップのある旨を運転者に報知するため、スタックの解消に対し好適なタイミングで次の運転操作を行うことができる。
【0074】
(4)本実施形態では、自動操舵制御の実行中においてアシストモータ23の電流Imbが所定値以上のとき、転舵輪3のグリップが発生している旨を判定する。すなわち、転舵輪3のグリップの発生が反映されるアシストモータ23の電流Imbを用いてグリップのあるところを検出する。このため、転舵輪3のグリップを運転者のステアリング操作により検出する場合と比較して、グリップのあるところを精確に把握することができる。これにより、スタック解消の確度を高くすることができる。
【0075】
(5)本実施形態では、電動パワーステアリング装置1は、第1シャフト11Aに反力を付与する反力モータ21と、第2シャフト11Bにトルクを付与するアシストモータ23とを備える。この構成によれば、第1シャフト11Aの回転に対して独立して第2シャフト11Bを回転することが可能であるため、自動操舵制御中においてステアリング2を所定角度に維持することができる。
【0076】
(6)本実施形態では、転舵輪3のグリップが発生しているとき、反力モータ21の電流制御により第1シャフト11Aの操舵角θsと第2シャフト11Bの転舵角θt(すなわち、転舵輪3の転舵角θt)との差を小さくする。自動操舵制御によれば、第1シャフト11Aと第2シャフト11Bとが独立して回転するため、第1シャフト11Aの操舵角θsと第2シャフト11Bの転舵角θtとが一致しなくなる。このため、自動操舵制御により転舵輪3のグリップが生じるところを検出したときに車両を進行させると、運転者が予期しない方向に車両が進行する。この点、上記構成では、自動操舵制御により転舵輪3のグリップが生じるところを検出したとき、第1シャフト11Aの操舵角θsと第2シャフト11Bの転舵角θtとの差を小さくする。これにより、運転者が予期しない方向に車両が進行するといった事象を少なくすることができる。
【0077】
(7)本実施形態では、自動操舵制御の開始を要求するためのグリップ検出スイッチ49(自動制御要求装置)を備える。
スタックが生じたとき自動的に自動操舵制御を実行する構成としたとき、転舵輪3の転舵の開始は運転者にとっては不意な動作となる。この点、本発明では、自動操舵制御を開始するための自動操舵制御の開始操作を必要とする。すなわち、運転者の意思に基づいて自動操舵制御を開始する構成としているため、運転者に対して不意になる動作が少ない。
【0078】
(8)本実施形態では、自動操舵制御はブレーキ信号Sblkを検出したとき、転舵を停止し、その後、自動操舵制御を終了する。この構成によれば、運転者の意思により自動操舵制御を終了することができる。これにより、グリップが生じているか否かに拘わらず、転舵輪3の転舵を任意に止めることができる。
【0079】
<第2実施形態>
図6〜図8を参照して、第2実施形態について説明する。
本実施形態の電動パワーステアリング装置1は、一定の車速を維持する車速制御機能を備える車両に備えられる。そして、車速制御の実行中に自動操舵制御を行う。以下、第1実施形態の構成からの詳細な変更について説明する。なお、前記第1実施形態と共通する構成については同一の符合を付してその説明を省略する。
【0080】
車速制御について説明する。
車速制御は、アクセルペダルの操作に基づかずに車速を一定速度に維持する制御である。車両は一定速度で走行するため、運転者はステアリング操作のみに注力して車両を制御することができる。特に、舗装されていない道路を走行するとき、この車速制御が実行される。
【0081】
車速制御には、車速を一定速度に維持する定速度制御と、スタックを検出したときにスタックから脱出するための加速制御とが含まれる。
定速度制御は、車両の車速、加速度、および車両の姿勢等に基づいて、制御時よりも所定時間先の車速を推定し、スロットル開口度、噴射燃料、およびブレーキ操作を制御して車速を一定速度に維持する。
【0082】
加速制御は、定速度制御の実行中において、同制御における最大トルク以上のトルクが必要となるときに実行される。すなわち、舗装されていない道路を走行するとき、転舵輪3が雨水等により形成された窪みに嵌り込むことがある。このとき、定速度制御だけでは、スタックから脱出することは難しい。そこで、スタックを検出したときに、スタックが検出されなくなるまでの期間にわたって加速制御を実行して内燃機関の出力を増大する。これによって車両がスタックになったとき自動的にスタックを抜け出す。
【0083】
ところで、加速制御によってもスタックから抜け出せない場合がある。この場合、運転者が、ステアリング操作により転舵輪3のグリップのあるところを探し出す必要があるが、グリップのあるところを探し出すことは難しい。そこで、本実施形態では、車速制御中において、加速制御によっても脱出することのできないスタックにあるとき、本実施形態の自動操舵制御を実行する。
【0084】
図6を参照して、車速制御および自動操舵制御を実行するためのスイッチ類について説明する。これらスイッチ類の操作パネル110は、車両のシフトレバー210の横側に設けられている。
【0085】
操作パネル110には、車速制御の実行および停止を指令するための車速制御スイッチ120と、車速制御の車速を設定する車速制御ダイヤル130と、車速制御を停止した後に車速制御を再始動するための車速制御再始動スイッチ140と、自動操舵制御の実行および停止を指令するためのグリップ検出スイッチ150とが設けられている。操作パネル110には、これらのスイッチ類に加えて、グリップのありを示す第1表示装置160と、グリップのなしを示す第2表示装置170が設けられている。
【0086】
車速制御スイッチ120が押されることにより車速制御スイッチ120は「オン状態」に移行する。車速制御スイッチ120がオン状態にあるとき、同スイッチが押されたとき車速制御スイッチ120は「オフ状態」に移行する。
【0087】
図7を参照して、車両の制御装置が実行する「車速制御」の一例について説明する。なお同処理は、車速制御スイッチ120がオン状態になっている期間、電子制御装置40により所定の演算周期毎に繰り返し実行される。
【0088】
ステップS300において、車両がスタックしているか否かが判定される。
車両のスタックは、例えば、車速と転舵輪3の回転数との関係に基づいて判定する。
具体的には、転舵輪3の回転数に基づいて転舵輪3の回転数に対応する車速(以下、「演算車速」)を演算し、この演算車速と車速Vとの差が基準値よりも大きいとき、スタックと判定する。
【0089】
ステップS300においてスタックでない旨判定されるとき、定速度制御を維持する(ステップS301)。ステップS300においてスタックである旨判定されるとき、次のステップS310に移行する。ステップS310では定速度制御を停止する。
【0090】
ステップS311では、第1回目の加速制御が実行済みか否かを判定する。第1回目の加速制御済みではないとき、すなわちスタックを検出した後、加速制御を行っていないとき、ステップS312において加速制御を実行する。これにより、スタックからの脱出を試みる。一方、ステップS311において、第1回目の加速制御が実行済みである旨判定されたとき、次のステップS320に移行する。
【0091】
ステップS320において第2回目の加速制御が実行済みであるか否かを判定する。ここで否定判定されるとき、すなわち、第1回目の加速制御を実行したこと、かつスタックであるとき、ステップS321に移行する。
【0092】
ステップS321では、自動操舵制御を実行する。すなわち、転舵輪3を転舵して、グリップのあるところを探し出す。自動操舵制御により、グリップが検出されたとき(ステップS322:YES)、ステップS323に移行する。すなわち、グリップのあるところで加速制御を実行する。一方、自動操舵制御により、グリップが検出されなかったとき、同フローが終了する。
【0093】
一方、ステップS320において、肯定判定されるとき、すなわち、車両がスタックであり、かつ第2回目の加速制御を実行済みである旨判定されるとき、ステップS330に移行する。
【0094】
ステップ330では、第3回目の加速制御が実行済みであるか否かを判定する。ここで否定判定されるとき、すなわち、第2回目の加速制御を実行したこと、かつスタックであるとき、ステップS331に移行する。ステップS331〜ステップS333の処理は、ステップS321以降の処理と同様である。すなわち、自動操舵制御を実行し、グリップがあるときには加速制御を実行して、スタックからの脱出を試みる。
【0095】
ステップ330において、肯定判定されるとき、すなわち、第3回目の加速制御を実行したこと、かつスタックであるとき、ステップS334において操作パネル110のスタックである旨を表示する。これにより、加速制御および自動操舵制御によってもスタックから脱出することができない旨を運転者に報知する。
【0096】
図8を参照して、車速制御中において実行される「自動操舵制御」について説明する。
ステップS410において、車両制御装置200から車両がスタックにあるか否かの情報を取得して、スタックか否かを判定する。車両がスタックにないときは、同処理は終了する。
【0097】
ステップS420において、グリップ検出スイッチ150がオン状態か否かについて判定する。この判定処理は所定期間にわたって実行される。すなわち、車両制御装置200がスタックと判定してから運転者がグリップ検出スイッチ150を押すまでに所定時間を要するため、所定期間にわたって入力待機状態とすることにより、グリップ検出スイッチ150を押す機会を確保している。
【0098】
この判定が否定されるとき、すなわちグリップ検出スイッチ150が押されなかったとき、同処理は終了する。一方、グリップ検出スイッチ150が「オン状態」になっている旨判定されるとき、次のステップに移行する。
【0099】
ステップS430、すなわちグリップ検出スイッチ150が「オン状態」のとき、スロットル制御を禁止する旨のスロットル制御禁止信号を出力する。
ステップS440、すなわちスロットル制御禁止信号を出力したあと、「グリップ検出制御」を実行する。この「グリップ検出制御」は、第1実施形態と同様の「グリップ検出制御」である。ステップS450、すなわち「グリップ検出制御」の終了後、スロットル制御の禁止を解除する旨の信号を出力する。
【0100】
(第2実施形態の効果)
本実施形態の電動パワーステアリング装置1の電子制御装置40によれば、先の第1実施形態による前記(1)〜(8)の効果に加えて、さらに以下に示す効果を奏することができる。
【0101】
(9)本実施形態では、加速制御後にスタックにある旨判定されているとき、かつグリップ検出スイッチ150がオン状態にされているとき、自動操舵制御を実行する。
この構成によれば、車速制御の実行中において、(A)少なくとも1回、加速制御が実行された後において車両がスタックにあること、(B)グリップ検出スイッチ150がオン状態にされたことを条件として、自動操舵制御を実行する。すなわち、スタックが検出されたとき、自動操舵制御を実行する前に、加速制御によるスタックの解消が実行される。このため、スタックが検出された最初の時期に自動操舵制御を実行する場合と比べて、スタックの解消を迅速に行うことができる。
【0102】
(その他の実施形態)
本発明の実施態様は上記各実施形態に例示した態様に限られるものではなく、例えば以下のように変更することもできる。また以下の各変形例は、上記実施形態についてのみ適用されるものではなく、異なる変形例同士を互いに組み合わせて実施してもよい。
【0103】
・第1実施形態では、グリップ検出スイッチ49がオン状態になっているときグリップ検出制御を実行するが、これに代えて次の構成としてもよい。すなわち、スタックを検出したとき、運転者にグリップの検出の旨を報知し、その後、グリップ検出制御を自動的に実行する。この場合、グリップ検出スイッチ49を押す操作を行わなくてもグリップ検出制御が行われる。
【0104】
・第1実施形態では、自動操舵制御を実行するとき、スロットル制御を禁止するが、これに代えて、次の構成としてもよい。例えば、自動操舵制御を実行するとき、スロットルを所定開度までは制御可能とし、かつ所定開度以上にスロットルが開かないように制御する。これにより、自動操舵制御においても内燃機関の出力を所定値までは維持することができるため、傾斜しているところに車両があるとき車両の姿勢を安定することが可能となる。
【0105】
・第1実施形態では、スタックがあることを条件としてグリップ検出制御を実行しているが、このような条件を省略することもできる。すなわち、グリップ検出スイッチ49がオン状態になることのみを条件として、グリップ検出制御を実行する構成としてもよい。この場合、電子制御装置40によりスタックと判定されない状態のとき、運転者がスタックにあると判断する場合、例えば、転舵輪3のスリップが発生している状態において、自動操舵制御を実行することができる。
【0106】
・第1実施形態では、転舵輪3のグリップが発生しているか否かを判定するためのパラメータ(以下、「グリップパラメータ」)として、アシストモータ23の電流Imbを用いている。これに対し、グリップパラメータとして、例えば転舵輪3の回転速度の時間変化率、アシストモータ23の電圧、反力モータ21の電流Imaを用いることができる。これらのパラメータは、いずれも、転舵輪3が障害物にあたったとき転舵輪3の回転が制限されることにより、その値が変化するパラメータである。このため、このようなパラメータを採用することによっても、第1実施形態と同様の効果を得ることができる。
【0107】
・第1実施形態では、グリップの検出の有無を表示装置50(報知装置)により運転者に報知しているが、グリップの検出の結果を報知する手段はこれに限定されない。例えば、報知音、ステアリング2の振動等により、グリップの検出の有無を運転者に報知することができる。
【0108】
・第1実施形態では、グリップが検出されたとき転舵輪3の転舵を停止するが、これに代えて、転舵輪3の転舵を維持してもよい。例えば、グリップが解消されない程度のトルクが発生するように、アシストモータ23の電流Imbを制御する。この制御によれば、転舵輪3と障害物とを所定の力以上で接触し続けることにより転舵の停止に伴うグリップの低下を抑制することができるため、スタックの解消の可能性を高くすることができる。
【0109】
・第1実施形態では、ブレーキペダル48の操作により生じるブレーキ信号Sblkに基づいて転舵を停止し、その後、自動操舵制御を終了するが、これを次のように変更することもできる。例えば、ブレーキペダル48の操作に代えて、パーキングブレーキの操作に基づいて自動操舵制御を終了してもよい。すなわち、転舵輪3の回転速度を低下させる要求に基づいて転舵輪3の回転速度を低下させる装置(速度低下要求装置)であれば、これらの装置の動作信号に基づいて転舵を停止してもよく、上記(8)の効果と同様の効果を得ることができる。
【0110】
・第1実施形態では、反力モータ21と回転比変更機構30とを備える電動パワーステアリング装置1に自動操舵制御を適用しているが、自動操舵制御は他の形態の電動パワーステアリング装置にも適用することができる。例えば、反力モータ21のない電動パワーステアリング装置、ステアリング2の回転動力がワイヤを介して転舵輪3に伝達される所謂ステアバイワイヤ型の電動パワーステアリング装置に、自動操舵制御を適用することができる。
【0111】
・第2実施形態では、車速制御を備える車両について自動操舵制御を適用しているが、車速制御の制御フローは同実施形態に挙げたフローに限定されない。例えば、同実施形態のように所謂オフロードに適用される車速制御に対して自動操舵制御が適用されているが、高速運転時における車速制御を実行する車両に対しても自動操舵制御を適用することも可能である。
【符号の説明】
【0112】
1…電動パワーステアリング装置、2…ステアリング、3…転舵輪、10…操舵角伝達機構、11…ステアリングシャフト、12…ラックアンドピニオン機構、13…ラックシャフト、14…タイロッド、11A…第1シャフト、11B…第2シャフト、11C…第3シャフト、11D…第4シャフト、20…EPSアクチュエータ、21…反力モータ、22…ギア機構、23…アシストモータ、30…回転比変更機構、30A…遊星歯車機構、31…第1太陽歯車、32…第2太陽歯車、33…第1遊星軸、34…第2遊星軸、33A…第1遊星歯車、33B…第2遊星歯車、34A…第3遊星歯車、34B…第4遊星歯車、35…キャリア、35A…伝達ギア、40…電子制御装置、41…トルクセンサ、42…操舵角センサ、43…転舵角センサ、44…第1電流センサ、45…第2電流センサ、46…車速センサ、47…ヨーレートセンサ、48…ブレーキペダル、49…グリップ検出スイッチ、50…表示装置、110…操作パネル、120…車速制御スイッチ、130…車速制御ダイヤル、140…車速制御再始動スイッチ、150…グリップ検出スイッチ、160…第1表示装置、170…第2表示装置、200…車両制御装置、210…シフトレバー。
【特許請求の範囲】
【請求項1】
電動モータの電流制御により転舵輪の転舵角を変更する自動操舵制御を行なう電動パワーステアリング装置の制御装置において、
前記自動操舵制御により前記転舵輪のグリップが発生した転舵角を検出する
ことを特徴とする電動パワーステアリング装置の制御装置。
【請求項2】
請求項1に記載の電動パワーステアリング装置の制御装置において、
前記転舵輪のグリップが発生したとき、前記自動操舵制御を停止する
ことを特徴とする電動パワーステアリング装置の制御装置。
【請求項3】
請求項1または2に記載の電動パワーステアリング装置の制御装置において、
前記転舵輪のグリップが発生したとき、前記転舵輪のグリップが発生したことを報知するための報知装置を作動させる
ことを特徴とする電動パワーステアリング装置の制御装置。
【請求項4】
請求項1〜3のいずれか一項に記載される電動パワーステアリング装置の制御装置において、
前記転舵輪のグリップの発生が反映される前記電動モータのパラメータをグリップパラメータとして、
前記自動操舵制御の実行中かつ前記グリップパラメータが所定値以上のとき、前記転舵輪のグリップが発生している旨判定する
ことを特徴とする電動パワーステアリング装置の制御装置。
【請求項5】
請求項1〜4のいずれか一項に記載される電動パワーステアリング装置の制御装置において、
前記電動パワーステアリング装置は、ステアリングと一体的に回転する第1シャフトと、この第1シャフトに反力を付与する反力モータと、ラックシャフトに連動して回転する第2シャフトと、この第2シャフトにトルクを付与するアシストモータとしての前記電動モータとを含む
ことを特徴とする電動パワーステアリング装置の制御装置。
【請求項6】
請求項5に記載の電動パワーステアリング装置の制御装置において、
前記転舵輪のグリップが発生しているとき、前記反力モータの電流制御により前記第1シャフトの操舵角と前記転舵輪の転舵角との差を小さくする
ことを特徴とする電動パワーステアリング装置の制御装置。
【請求項7】
請求項1〜6のいずれか一項に記載される電動パワーステアリング装置の制御装置において、
前記自動操舵制御の開始を要求する自動制御要求装置を含む
ことを特徴とする電動パワーステアリング装置の制御装置。
【請求項8】
請求項1〜7のいずれか一項に記載される電動パワーステアリング装置の制御装置において、
前記自動操舵制御は、前記転舵輪の回転速度を低下させる要求を入力するための速度低下要求装置が操作されたことを示す操作信号を検出したとき、本制御を終了するものである
ことを特徴とする電動パワーステアリング装置の制御装置。
【請求項1】
電動モータの電流制御により転舵輪の転舵角を変更する自動操舵制御を行なう電動パワーステアリング装置の制御装置において、
前記自動操舵制御により前記転舵輪のグリップが発生した転舵角を検出する
ことを特徴とする電動パワーステアリング装置の制御装置。
【請求項2】
請求項1に記載の電動パワーステアリング装置の制御装置において、
前記転舵輪のグリップが発生したとき、前記自動操舵制御を停止する
ことを特徴とする電動パワーステアリング装置の制御装置。
【請求項3】
請求項1または2に記載の電動パワーステアリング装置の制御装置において、
前記転舵輪のグリップが発生したとき、前記転舵輪のグリップが発生したことを報知するための報知装置を作動させる
ことを特徴とする電動パワーステアリング装置の制御装置。
【請求項4】
請求項1〜3のいずれか一項に記載される電動パワーステアリング装置の制御装置において、
前記転舵輪のグリップの発生が反映される前記電動モータのパラメータをグリップパラメータとして、
前記自動操舵制御の実行中かつ前記グリップパラメータが所定値以上のとき、前記転舵輪のグリップが発生している旨判定する
ことを特徴とする電動パワーステアリング装置の制御装置。
【請求項5】
請求項1〜4のいずれか一項に記載される電動パワーステアリング装置の制御装置において、
前記電動パワーステアリング装置は、ステアリングと一体的に回転する第1シャフトと、この第1シャフトに反力を付与する反力モータと、ラックシャフトに連動して回転する第2シャフトと、この第2シャフトにトルクを付与するアシストモータとしての前記電動モータとを含む
ことを特徴とする電動パワーステアリング装置の制御装置。
【請求項6】
請求項5に記載の電動パワーステアリング装置の制御装置において、
前記転舵輪のグリップが発生しているとき、前記反力モータの電流制御により前記第1シャフトの操舵角と前記転舵輪の転舵角との差を小さくする
ことを特徴とする電動パワーステアリング装置の制御装置。
【請求項7】
請求項1〜6のいずれか一項に記載される電動パワーステアリング装置の制御装置において、
前記自動操舵制御の開始を要求する自動制御要求装置を含む
ことを特徴とする電動パワーステアリング装置の制御装置。
【請求項8】
請求項1〜7のいずれか一項に記載される電動パワーステアリング装置の制御装置において、
前記自動操舵制御は、前記転舵輪の回転速度を低下させる要求を入力するための速度低下要求装置が操作されたことを示す操作信号を検出したとき、本制御を終了するものである
ことを特徴とする電動パワーステアリング装置の制御装置。
【図1】



【図2】

【図3】

【図4】

【図5】

【図6】
【図7】
【図8】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2013−71470(P2013−71470A)
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願番号】特願2011−209549(P2011−209549)
【出願日】平成23年9月26日(2011.9.26)
【出願人】(000001247)株式会社ジェイテクト (7,053)
【出願人】(301065892)株式会社アドヴィックス (1,291)
【出願人】(000000011)アイシン精機株式会社 (5,421)
【Fターム(参考)】
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願日】平成23年9月26日(2011.9.26)
【出願人】(000001247)株式会社ジェイテクト (7,053)
【出願人】(301065892)株式会社アドヴィックス (1,291)
【出願人】(000000011)アイシン精機株式会社 (5,421)
【Fターム(参考)】
[ Back to top ]