
電動パワーステアリング装置
【課題】1シャント式電流検出回路でモータ各相電流の検出を行うと共に、電流検出回路の故障(異常)を簡易な構成で確実に行い、安全性を高めた電動パワーステアリング装置を提供する。
【解決手段】インバータに接続された1つのシャント抵抗と、シャント抵抗の両端に正方向に接続され、モータの相電流を検出してアシスト制御の制御用モータ電流検出値とする制御用モータ電流検出回路と、シャント抵抗の両端に逆方向に接続され、制御用モータ電流検出回路の故障を検出するための診断用モータ電流検出回路とを具備し、1シャント式でモータの各相電流を検出してアシスト制御を行うと共に、シャント抵抗の両端電圧を増幅する回路を2系統とする。
【解決手段】インバータに接続された1つのシャント抵抗と、シャント抵抗の両端に正方向に接続され、モータの相電流を検出してアシスト制御の制御用モータ電流検出値とする制御用モータ電流検出回路と、シャント抵抗の両端に逆方向に接続され、制御用モータ電流検出回路の故障を検出するための診断用モータ電流検出回路とを具備し、1シャント式でモータの各相電流を検出してアシスト制御を行うと共に、シャント抵抗の両端電圧を増幅する回路を2系統とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、PWMのデユーティ指令値で駆動制御される多相モータにより、車両の操舵系に操舵補助力を付与するようにした電動パワーステアリング装置に関し、特にPWM駆動する駆動部と電源(バッテリ)との間に単一の電流検出回路(1シャント式電流検出回路)を設けてアシスト制御すると共に、電流検出回路等の故障や異常を診断することにより安全性を高めた高機能な電動パワーステアリング装置に関する。
【背景技術】
【0002】
車両の操舵系をモータの回転力でアシスト制御する電動パワーステアリング装置は、モータの駆動力を減速機を介してギア又はベルト等の伝達機構により、ステアリングシャフト或いはラック軸に補助力を付勢するようになっている。そして、当該モータが所望のトルクを発生するようにモータに電流を供給するため、モータ駆動回路にインバータが用いられている。
【0003】
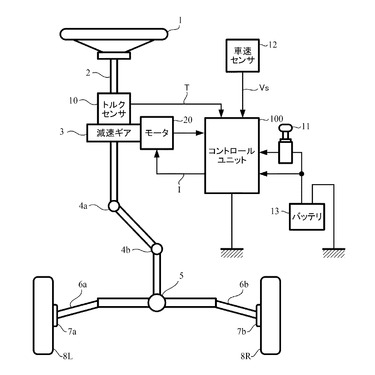
ここで、従来の電動パワーステアリング装置の一般的な構成を図1に示して説明すると、ハンドル1のコラム軸(ステアリングシャフト)2は減速ギア3、ユニバーサルジョイント4a及び4b、ピニオンラック機構5、タイロッド6a,6bを経て、更にハブユニット7a,7bを介して操向車輪8L,8Rに連結されている。また、コラム軸2には、ハンドル1の操舵トルクを検出するトルクセンサ10が設けられており、ハンドル1の操舵力を補助するモータ20が減速ギア3を介してコラム軸2に連結されている。電動パワーステアリング装置を制御するコントロールユニット(ECU)100には、バッテリ13から電力が供給されると共に、イグニションキー11を経てイグニションキー信号が入力される。コントロールユニット100は、トルクセンサ10で検出された操舵トルクTと車速センサ12で検出された車速Vsとに基づいてアシスト(操舵補助)指令の電流指令値の演算を行い、電流制御部で電流指令値に補償等を施した電圧指令値Eによってモータ20に供給する電流Iを制御する。なお、車速VsはCAN(Controller Area Network)等から受信することも可能である。
【0004】
コントロールユニット100は主としてCPU(MPU、MCUも含む)で構成されるが、そのCPU内部においてプログラムで実行される一般的な機能を示すと図2のようになる。
【0005】
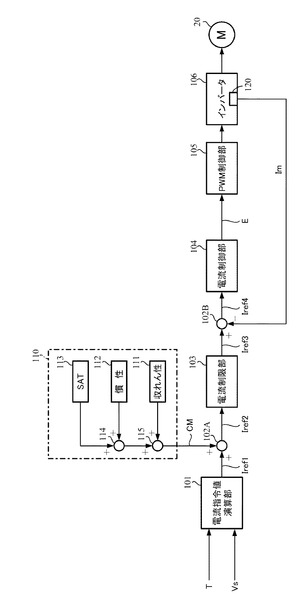
図2を参照してコントロールユニット100の機能及び動作を説明すると、トルクセンサ10で検出された操舵トルクT及び車速センサ12で検出された車速Vsは、電流指令値Iref1を演算する電流指令値演算部101に入力される。電流指令値演算部101は、入力された操舵トルクT及び車速Vsに基づいてアシストマップ等を用いて、例えば3相のモータ20に供給する電流の制御目標値である電流指令値Iref1を決定する。電流指令値Iref1は加算部102Aを経て電流指令値Iref2として電流制限部103に入力され、最大電流を制限された電流指令値Iref3が減算部102Bに入力され、フィードバックされているモータ電流値Imとの偏差Iref4(=Iref3−Im)が演算され、その偏差Iref4がPI制御等を行う電流制御部104に入力される。電流制御部104で特性改善された電圧指令値EがPWM制御部105に入力され、更に駆動部としてのインバータ106を介してモータ20がPWM駆動される。モータ20の電流値Imはインバータ106内の電流検出回路120で検出され、減算部102Bにフィードバックされる。インバータ106はスイッチング素子として一般的にFETが用いられ、FETのブリッジ回路で構成されている。
【0006】
また、加算部102Aには補償部110から補償信号CMが加算されており、補償信号CMの加算によってシステム系の補償を行い、収れん性や慣性特性等を改善するようようになっている。補償部110は、セルフアライニングトルク(SAT)113と慣性112を加算部114で加算し、その加算結果に更に収れん性111を加算部115で加算し、加算部115の加算結果を補償信号CMとしている。
【0007】
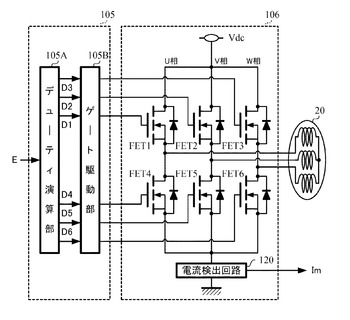
モータ20が3相(U,V,W)ブラシレスモータの場合、PWM制御部105及びインバータ106の詳細は例えば図3に示すような構成となっている。PWM制御部105は、電圧指令値Eを所定式に従って3相分のPWMデューティ指令値D1〜D6を演算するデューティ演算部105Aと、PWMデューティ指令値D1〜D6でFET1〜FET6の各ゲートを駆動してON/OFFするゲート駆動部105Bとで構成されており、インバータ106は、U相の上段FET1及び下段FET4で成る上下アームと、V相の上段FET2及び下段FET5で成る上下アームと、W相の上段FET3及び下段FET6で成る上下アームとで成る3相ブリッジで構成されており、PWMデューティ指令値D1〜D6でON/OFFされることによってモータ20を駆動する。
【0008】
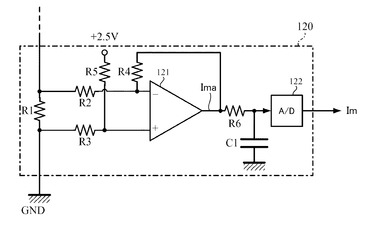
このような構成において、インバータ106の駆動電流ないしはモータ20のモータ電流を計測する必要があるが、コントロールユニット100のコンパクト化、軽量化、コストダウンの要求項目の1つとして、電流検出回路120の単一化(1シャント式電流検出回路)がある。電流検出回路の単一化として1シャント式電流検出回路が知られており、1シャント式の電流検出回路120の構成は例えば図4に示すようになっている(特開2009−131064号公報)。即ち、FETブリッジの底部アームと接地(GND)との間に1つのシャント抵抗R1が接続されており、FETブリッジに電流が流れたときのシャント抵抗R1による降下電圧を演算増幅器(差動増幅回路)121及び抵抗R2〜R4で電流値Imaに換算し、更に抵抗R6及びコンデンサC1で成るフィルタを経てA/D変換部122で所定のタイミングにA/D変換し、ディジタル値の電流値Imを出力するようになっている。なお、演算増幅器121の正端子入力には、抵抗R5を経て基準電圧となる2.5Vが接続されている。
【0009】
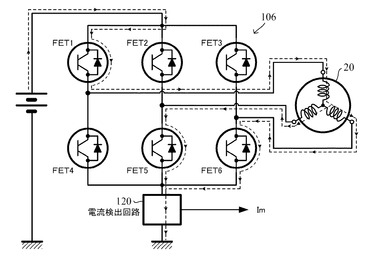
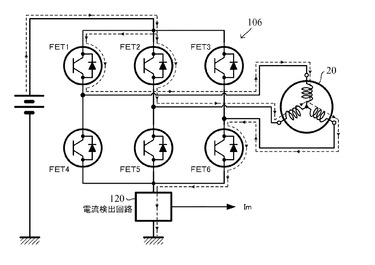
図5は電源(バッテリ)、インバータ106、電流検出回路120及びモータ20の結線図を示すと共に、U相の上段FET1がON(下段FET4はOFF)、V相の上段FET2がOFF(下段FET5はON)、W相の上段FET3がOFF(下段FET6はON)の状態時の電流経路(破線)を示している。また、図6は、U相の上段FET1がON(下段FET4はOFF)、V相の上段FET2がON(下段FET5はOFF)、W相の上段FET3がOFF(下段FET6はON)の状態時の電流経路(破線)を示している。これら図5及び図6の電流経路から分かるように、上段FETがONしている相の合計値が電流検出回路器120に検出電流として現れる。即ち、図5ではU相電流を検出することができ、図6ではU相及びV相電流を検出することができる。これは、電流検出回路120がインバータ106の上段アームと電源との間に接続されている場合も同様である。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開2009−131064号公報
【特許文献2】特開2009−232569号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
このように従来の装置(例えば特開2009−131064号公報)では電流検出回路が設けられているものの、電流検出回路が故障(異常を含む)したときの対策が施されていないため、操舵系の安全性向上の面から故障対策の実施が強く要請されている。
【0012】
また、一方では、インバータ内のFETの短絡故障による過電流故障を検出するために、電流検出回路の後段にダイオードを用いてピークホールドを行うような回路が提案されている(特開2009−232569号公報)。しかしながら、演算増幅器の出力電圧をダイオードを介して充放電用コンデンサに電荷を充電する場合、コンデンサへの充電電流が演算増幅器の負荷電流となるため、充電電流(負荷電流)が大きい場合、演算増幅器の応答性が低下してしまい、電流検出回路及びピークホールド回路の検出精度が悪化するという問題がある。
【0013】
本発明は上述のような事情からなされたものであり、本発明の目的は、1シャント式電流検出回路でモータ各相電流の検出を行うと共に、電流検出回路の故障や異常の診断を簡易な構成で確実に行い、安全性を一層高めた電動パワーステアリング装置を提供することにある。
【課題を解決するための手段】
【0014】
本発明は、操舵トルク及び車速に基づいて電流指令値を演算し、前記電流指令値に基づいてFETブリッジで成るインバータを介して多相のモータを駆動し、前記モータの駆動制御によって操舵系をアシスト制御する電動パワーステアリング装置に関し、本発明の上記目的は、前記インバータに接続された1つのシャント抵抗と、前記シャント抵抗の両端に正方向に接続され、前記モータの相電流を検出して前記アシスト制御の制御用モータ電流検出値とする制御用モータ電流検出回路と、前記シャント抵抗の両端に逆方向に接続され、前記制御用モータ電流検出回路の故障を検出するための診断用モータ電流検出回路とを具備し、1シャント式で前記モータの各相電流を検出して前記アシスト制御を行うと共に、前記シャント抵抗の両端電圧を増幅する回路を2系統とすることにより達成される。
【0015】
また、本発明の上記目的は、前記制御用モータ電流検出回路により検出された制御用モータ電流検出値と、前記診断用モータ電流検出回路により検出された診断用モータ電流検出値とを比較することにより、前記制御用モータ電流検出回路又は前記診断用モータ電流検出回路のいずれかが故障していることを検出することにより、或いは前記診断用モータ電流検出回路の後段に接続された最大電流検出回路を具備し、前記最大電流検出回路は、前記診断用モータ電流検出回路から出力される診断用モータ電流検出電圧のピークを一定時間ホールドするようになっていることにより、或いは前記最大電流検出回路を、ピークホールド用トランジスタと、充放電時定数を生成する抵抗及びコンデンサとで構成し、前記診断用モータ電流検出回路の出力を前記トランジスタのベースに入力し、前記トランジスタのエミッタと前記抵抗及びコンデンサとの間に充電抵抗を介挿することにより、或いは前記最大電流検出回路により検出された最大電流検出値と、前記制御用モータ電流検出回路により検出された制御用モータ電流検出値と、前記診断用モータ電流検出回路により検出された診断用モータ電流検出値とを比較することにより、前記制御用モータ電流検出回路、前記診断用モータ電流検出回路、前記最大電流検出回路のいずれかの故障、異常を診断するようになっていることにより、或いは前記診断用モータ電流検出回路は、前記診断用モータ電流検出回路の出力電圧が、前記シャント抵抗を流れる電流が0のときの電圧を基準として、電流が電源側から接地側に流れるときに、前記電流の大きさに応じて上昇するようになっていることにより、或いは前記制御用モータ電流検出回路は、前記制御用モータ電流検出回路の出力電圧が、前記シャント抵抗を流れる電流が0のときの電圧を基準として、電流が電源側から接地側に流れるときに、前記電流の大きさに応じて低下するようになっていることにより、或いは前記制御用モータ電流検出回路により検出された制御用モータ電流検出電圧と、前記診断用モータ電流検出回路で検出された診断用モータ電流検出電圧との和が、正常時には前記電流に関係なく一定電圧となっていることにより、より効果的に達成される。
【発明の効果】
【0016】
本発明によれば、安価な1シャント式電流検出回路(制御用モータ電流検出回路)を用いながら、診断用モータ電流検出回路は演算増幅器(差動増幅回路)で構成され、最大電流検出回路はピークホールド用トランジスタ、充放電時定数を生成する抵抗、コンデンサで構成され、診断用モータ電流検出回路の演算増幅器の出力をトランジスタのベースに入力し、充放電コンデンサを充電抵抗を介してトランジスタのエミッタに接続することにより、ダイオードを用いた場合(特許文献2)と同様のピークホールド機能を有しながら演算増幅器の負荷電流を小さくすることができ、演算増幅器の出力負荷電流による出力応答の低下を防止することができ、電流検出回路の精度悪化を防止することができる。
【0017】
また、本発明によれば、制御用モータ電流検出回路により検出された制御用モータ電流検出値と、診断用モータ電流検出回路により検出された診断用モータ電流検出値とを比較することにより、いずれかのモータ電流検出回路の故障であるかを検出することができる。診断用モータ電流検出回路の後段に、診断用モータ電流検出回路から出力される診断用モータ電流検出電圧のピークを一定時間ホールドする最大電流検出回路を接続しているので、最大電流検出値を監視することにより、例えばインバータ内のFET短絡故障等の過電流故障を検出することができる。更に本発明によれば、最大電流検出回路により検出された最大電流検出値と、制御用モータ電流検出値、診断用モータ電流検出値とを比較することにより、いずれかの回路が故障したことを検出することができるので、故障箇所の判定によってアシスト制御を継続することも可能である。
【図面の簡単な説明】
【0018】
【図1】一般的な電動パワーステアリング装置の構成例を示す図である。
【図2】コントロールユニットの一例を示すブロック構成図である。
【図3】PWM制御部及びインバータの構成例を示す結線図である。
【図4】1シャント式電流検出器の構成例を示す結線図である。
【図5】1シャント式電流検出器を備えたインバータの動作例を示す電流経路図である。
【図6】1シャント式電流検出器を備えたインバータの動作例を示す電流経路図である。
【図7】本発明の構成例を示す結線図である
【図8】本発明の動作例を示すフローチャートの一部である。
【図9】本発明の動作例を示すフローチャートの一部である。
【図10】他の異常検出方法を説明するための図である。
【発明を実施するための形態】
【0019】
本発明は、インバータと接地(GND)間に1個のシャント抵抗を接続し、シャント抵抗の両端電圧からモータ電流を検出する電流検出回路であり、シャント抵抗の両端電圧を増幅する回路は、モータ制御に使用する制御用モータ電流検出回路と、制御用モータ電流検出回路の故障(異常を含む)を検出するための診断用モータ電流検出回路の2回路で構成され、制御用モータ電流検出回路により検出された制御用モータ電流検出値と、診断用モータ電流検出回路により検出された診断用モータ電流検出値とを比較することにより、制御用モータ電流検出回路の故障を検出する。
【0020】
診断用モータ電流検出回路は、診断用モータ電流検出回路の出力電圧が、シャント抵抗を流れる電流が0の時の電圧を基準として、電流が電源側から接地(GND)側に流れるときに、その電流の大きさに応じて上昇するように構成し、更に診断用モータ電流検出回路の後段に、診断用モータ電流検出回路から出力される診断用モータ電流検出電圧のピークを一定時間ホールドする最大電流検出回路を接続し、その最大電流検出値を監視することにより、例えばインバータ内のFET短絡故障等の過電流故障を検出する。
【0021】
また、制御用モータ電流検出回路は、制御用モータ電流検出回路の出力電圧が、シャント抵抗を流れる電流が0の時の電圧を基準として、電流が電源側から接地側に流れるときに、その電流の大きさに応じて低下する構成とし、制御用モータ電流検出回路により検出された制御用モータ電流検出電圧と、診断用モータ電流検出回路により検出された診断用モータ電流検出電圧との和は、正常時には電流に関わらず一定電圧になるように構成し、制御用モータ電流検出電圧と診断用モータ電流検出電圧の和であるモータ電流検出電圧和を監視することで、制御用モータ電流検出電圧又は診断用モータ電流検出電圧が故障により、正常な電圧を出力できないなどの異常を検出する。
【0022】
また、本発明によれば、最大電流検出回路により検出された最大電流検出値と、制御用モータ電流検出値、診断用モータ電流検出値を比較することにより、いずれかの回路が故障したことを検出することができ、電動パワーステアリング装置の安全性を一層高めることができる。
【0023】
以下に、本発明の実施形態を図面を参照して詳細に説明する。
【0024】
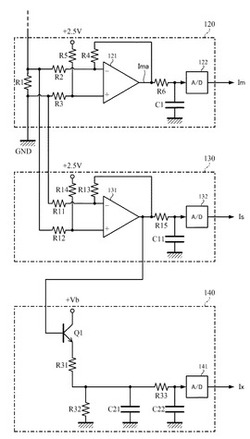
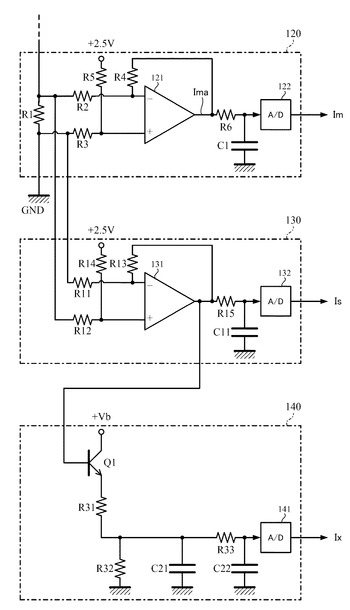
図7は本発明の構成例を図4に対応させて示しており、図4における電流検出回路120は、本発明では制御用モータ電流検出回路として機能し、シャント抵抗R1の両端には制御用モータ電流検出回路120が接続され、シャント抵抗R1の両端には更に診断用モータ電流検出回路130が接続され、診断用モータ電流検出回路130の後段には最大電流検出回路140が接続されている。
【0025】
制御用モータ電流検出回路120は演算増幅器(差動増幅回路)121で構成され、その出力電圧はシャント抵抗R1を流れる電流が0のときの電圧が2.5Vとなり、電流が電源側から接地側に流れるときを正電流とすると、正電流が流れた場合にその電流の大きさに応じて2.5Vから低下するようになっている。例えば正方向に100A流れた場合、出力電圧は、2.5V電圧に対して2V低下して0.5Vとなり、負方向に100A流れた場合、2.5Vに対して2V低下して0.5Vとなる。制御用モータ電流検出回路120により検出された制御用モータ電流検出電圧は、任意のタイミングでCPU(MCU等を含む)によりA/D変換部122によるA/D変換後に物理値Imに変換され、モータ電流を制御するために使用される。
【0026】
診断用モータ電流検出回路130は演算増幅器(差動増幅回路)131で構成され、その出力電圧(演算増幅器131の出力)はシャント抵抗R1を流れる電流が0のときの電圧が2.5Vとなり、電流が電源側から接地側に流れるときを正電流とすると、正電流が流れた場合にその電流の大きさに応じて2.5Vから上昇するようになっている。例えば正方向に100A流れた場合、出力電圧は、2.5V電圧に対して2V低下して0.5Vとなり、負方向に100A流れた場合、2.5Vに対して2V上昇して1.0Vとなる。診断用モータ電流検出回路130により検出された診断用モータ電流検出電圧は、任意のタイミングでCPU(MCU等を含む)によりA/D変換部132によるA/D変換後に物理値(Is)に変換され、制御用モータ電流検出値の異常を検出するために使用される。
【0027】
なお、制御用モータ電流検出回路120の演算増幅器121の負入力端子には、シャント抵抗R1の上部電圧が入力抵抗R2を経て入力され(正方向)、診断用モータ電流検出回路130の演算増幅器131の負入力端子には、シャント抵抗R1の下部電圧が入力抵抗R11を経て入力されている(逆方向)。
【0028】
最大電流検出回路140はトランジスタQ1、充放電用コンデンサC21、充電抵抗R31、放電抵抗R32で構成され、診断用モータ電流検出回路130の出力電圧(演算増幅器131の出力)に対し、トランジスタQ1のベース・エミッタ電圧Vbe低下した電圧よりも充放電用コンデンサC21の電圧が小さい場合(充電時)は、診断用モータ電流検出回路130の出力電圧に対し、トランジスタQ1のベース・エミッタ電圧Vbe低下した電圧となるように、充電抵抗R31と充放電用コンデンサC21の時定数に応じて、充放電用コンデンサC21に電荷が充電される。診断用モータ電流検出回路130の出力電圧に対し、トランジスタQ1のベース・エミッタ電圧Vbe低下した電圧よりも充放電用コンデンサC21の電圧が大きい場合(放電時)は、放電抵抗R32と充放電用コンデンC21の時定数に応じて、充放電用コンデンサC21から電荷が放電される。
【0029】
抵抗R33及びコンデンサC22はフィルタを構成しており、ノイズが除去された出力がA/D変換部141でA/D変換され、ディジタル値Ixとして出力される。
【0030】
特許文献2に示されているようなダイオードを用いたピークホールド回路の場合、演算増幅器の出力電圧をダイオードを介して充放電用コンデンサに電荷を充電する構成であるため、コンデンサへのmAオーダの充電電流が演算増幅器の負荷電流となり、演算増幅器の応答性が低下し、電流検出回路及びピークホールド回路の検出精度が悪化する可能性があるが、本発明のように演算増幅器の出力をトランジスタのベースで入力する構成の場合、負荷電流はμAオーダに低減できるため、演算増幅器の応答性への影響を回避できる。
【0031】
また、最大電流検出回路140は、診断用モータ電流検出回路130の出力電圧を放電抵抗R32及び充放電用コンデンC21でピークホールドする構成となっている。シャント抵抗R1に流れる電流がインバータの電源側から接地側に流れるときの正の電流をピークホールドする回路であるため、インバータのアーム短絡による過電流を検出するだけでなく、例えば下段FETが短絡故障し、上段FETが20KHzでPWM駆動している場合に発生する瞬間(50μs以下)かつ断続的(20KHz周期)な過電流のピークを一定時間ホールドする。ピークホールドされた電圧は、任意のタイミングでCPUによりA/D変換部141によるA/D変換後に物理値(Ix)に変換され、最大電流の異常診断や制御用モータ電流検出回路120及び診断用モータ電流検出回路130の故障診断のために使用される。
【0032】
抵抗R32及びコンデンサC21で生成される充放電時定数は上述のことを考慮してμsオーダが望ましく、放電時定数は50μs間は確実にピーク値をホールドできる200μs〜1msが望ましい。
【0033】
このような構成において、その動作例を図8及び図9のフローチャートを参照して説明する。
【0034】
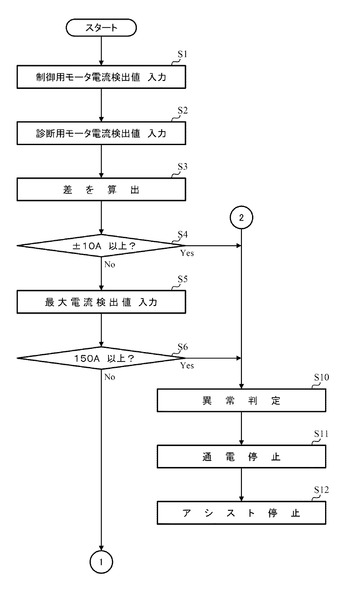
先ず制御用モータ電流検出値Imを入力し(ステップS1)、次いで診断用モータ電流検出値Isを入力する(ステップS2)。この入力の順番は逆であっても良い。制御用モータ電流検出値Imと診断用モータ電流検出値Isは、正常であれば同じ電流検出値を示すが、制御用モータ電流検出回路120又は診断用モータ電流検出回路130のオフセット電圧が変化するような故障や、ゲインが変化するような故障(異常を含む)が発生した場合は、制御用モータ電流検出値Imと診断用モータ電流検出値Isには差が発生する。そのため、制御用モータ電流検出値Imと診断用モータ電流検出値Isとの差を算出し(ステップS3)、差が所定値、例えば±10A以上であるか否かを判定し(ステップS4)、差が±10A以上であれば異常(故障を含む)と判定する(ステップS10)。
【0035】
異常と判定された場合はインバータへの通電を停止し(ステップS11)、アシスト制御を停止する(ステップS12)。
【0036】
一方、上記ステップS4において、差が±10Aより小さいと判定された場合には、更に最大電流検出回路140により検出された最大電流検出値Ixを入力して監視し(ステップS5)、最大電流検出値Ixが所定値、例えば150A以上であるか否かを判定する(ステップS6)。最大電流検出値Ixが150A以上である場合は、インバータの過電流故障(例えばFET短絡)が発生したと判定し、異常(故障を含む)を検出し(ステップS10)、上述と同様に電流通電を停止し(ステップS11)、アシストを停止させる(ステップS12)。
【0037】
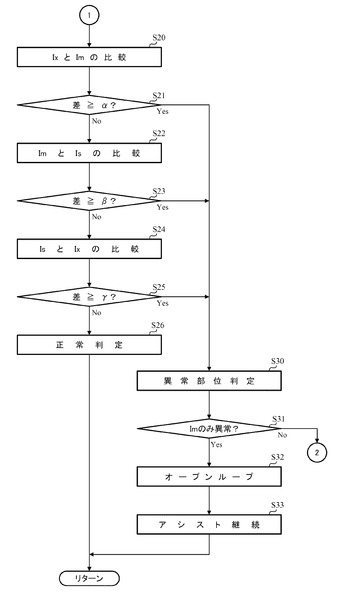
最大電流検出値Ixが150Aよりも小さい場合には、更に以下の診断を行う。即ち、最大電流検出値Ix、制御用モータ電流検出値Im、診断用モータ電流検出値Isはシャント抵抗R1に流れる電流を検出するということで互いに相関性があるため、各々の電流検出値を比較することで、どの電流検出回路が故障したかを診断することができる。具体的には、次のような比較の判定(a)〜(c)を行い、それぞれ一定値以上の差がある場合は異常、それ以外は正常と判定する。
(a)最大電流検出値Ixと制御用モータ電流検出値Imの比較、つまり最大電流検出値Ixと制御用モータ電流検出値Imの差を算出し(ステップS20)、その差が所定値α以上であるか否かを判定する(ステップS21)。
(b)制御用モータ電流検出値Imと診断用モータ電流検出値Isの比較、つまり制御用モータ電流検出値Imと診断用モータ電流検出値Isの差を算出し(ステップS22)、その差が所定値β以上であるか否かを判定する(ステップS23)。
(c)診断用モータ電流検出値Isと最大電流検出値Ixの比較、つまり診断用モータ電流検出値Isと最大電流検出値Ixの差を算出し(ステップS24)、その差が所定値γ以上であるか否かを判定する(ステップS25)。
上記判定(a)〜(c)において、各差が全てそれぞれの所定値よりも小さい場合には、全て正常と判定する(ステップS26)。
【0038】
そして、上記判定(a)〜(c)において、各差がそれぞれの所定値以上となった場合には、異常部位の判定を行う(ステップS30)。即ち、判定(a)が異常、判定(b)が異常、判定(c)が正常の場合には、制御用モータ電流検出値Imが異常と判定する。また、判定(a)が正常、判定(b)が異常、判定(c)が異常の場合には診断用モータ電流検出値Isが異常と判定し、判定(a)が異常、判定(b)が正常、判定(c)が異常の場合には最大電流検出値Ixが異常と判定する。最大電流検出回路140は診断用モータ電流検出回路130の後段に接続されているため、診断用モータ電流検出回路130が故障した場合は、最大電流検出値Ixも異常な出力となる場合がある。その場合には、判定(a)が異常、判定(b)が異常、判定(c)が異常となる。
【0039】
上記判定(a)〜(c)において、制御用モータ電流検出値Imのみが異常と判定される場合((a)異常、(b)異常、(c)正常)、モータの電流制御用に制御用モータ電流検出値Imを使用せず、バックアップ制御としてのオープンループで電流制御を継続し(ステップS32)、アシストを継続する(ステップS33)。それ以外の場合は、最大電流検出回路140が異常の可能性があり、インバータの故障を検出できなくなる可能性が高いため、上記ステップS10にリターンして電流制御を停止し(ステップS11)、アシストを停止させる(ステップS12)。
【0040】
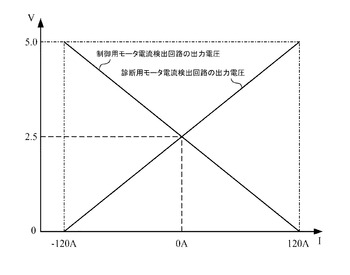
その他の異常検出方法としては、制御用モータ電流検出回路120の出力電圧と診断用モータ電流検出回路130の出力電圧の和は、図10に示すように正常時は一定値(5V)となるため、その和が例えば5.3V以上又は4.7V以下であれば異常と判定するようにしても良い。
【0041】
また、制御用モータ電流検出回路120、診断用モータ電流検出回路130、最大電流検出回路140はいずれも図7の構成に限定されるものではなく、同一の機能、作用を有する形態であれば良い。更に、上述では3相モータについて説明したが、本発明は2相その他のモータについても同様に適用することができる。また、上述では補償部が設けられた電動パワーステアリング装置を説明しているが、補償部は必ずしも必要なものではない。
【符号の説明】
【0042】
1 ハンドル
2 コラム軸(ステアリングシャフト)
10 トルクセンサ
12 車速センサ
20 モータ
100 コントロールユニット
101 電流指令値演算部
103 電流制限部
104 電流制御部
105 PWM制御部
106 インバータ
110 補償部
120 電流検出回路(制御用モータ電流検出回路)
121,131 演算増幅器(差動増幅回路)
122 A/D変換部
130 診断用モータ電流検出回路
140 最大電流検出回路
【技術分野】
【0001】
本発明は、PWMのデユーティ指令値で駆動制御される多相モータにより、車両の操舵系に操舵補助力を付与するようにした電動パワーステアリング装置に関し、特にPWM駆動する駆動部と電源(バッテリ)との間に単一の電流検出回路(1シャント式電流検出回路)を設けてアシスト制御すると共に、電流検出回路等の故障や異常を診断することにより安全性を高めた高機能な電動パワーステアリング装置に関する。
【背景技術】
【0002】
車両の操舵系をモータの回転力でアシスト制御する電動パワーステアリング装置は、モータの駆動力を減速機を介してギア又はベルト等の伝達機構により、ステアリングシャフト或いはラック軸に補助力を付勢するようになっている。そして、当該モータが所望のトルクを発生するようにモータに電流を供給するため、モータ駆動回路にインバータが用いられている。
【0003】
ここで、従来の電動パワーステアリング装置の一般的な構成を図1に示して説明すると、ハンドル1のコラム軸(ステアリングシャフト)2は減速ギア3、ユニバーサルジョイント4a及び4b、ピニオンラック機構5、タイロッド6a,6bを経て、更にハブユニット7a,7bを介して操向車輪8L,8Rに連結されている。また、コラム軸2には、ハンドル1の操舵トルクを検出するトルクセンサ10が設けられており、ハンドル1の操舵力を補助するモータ20が減速ギア3を介してコラム軸2に連結されている。電動パワーステアリング装置を制御するコントロールユニット(ECU)100には、バッテリ13から電力が供給されると共に、イグニションキー11を経てイグニションキー信号が入力される。コントロールユニット100は、トルクセンサ10で検出された操舵トルクTと車速センサ12で検出された車速Vsとに基づいてアシスト(操舵補助)指令の電流指令値の演算を行い、電流制御部で電流指令値に補償等を施した電圧指令値Eによってモータ20に供給する電流Iを制御する。なお、車速VsはCAN(Controller Area Network)等から受信することも可能である。
【0004】
コントロールユニット100は主としてCPU(MPU、MCUも含む)で構成されるが、そのCPU内部においてプログラムで実行される一般的な機能を示すと図2のようになる。
【0005】
図2を参照してコントロールユニット100の機能及び動作を説明すると、トルクセンサ10で検出された操舵トルクT及び車速センサ12で検出された車速Vsは、電流指令値Iref1を演算する電流指令値演算部101に入力される。電流指令値演算部101は、入力された操舵トルクT及び車速Vsに基づいてアシストマップ等を用いて、例えば3相のモータ20に供給する電流の制御目標値である電流指令値Iref1を決定する。電流指令値Iref1は加算部102Aを経て電流指令値Iref2として電流制限部103に入力され、最大電流を制限された電流指令値Iref3が減算部102Bに入力され、フィードバックされているモータ電流値Imとの偏差Iref4(=Iref3−Im)が演算され、その偏差Iref4がPI制御等を行う電流制御部104に入力される。電流制御部104で特性改善された電圧指令値EがPWM制御部105に入力され、更に駆動部としてのインバータ106を介してモータ20がPWM駆動される。モータ20の電流値Imはインバータ106内の電流検出回路120で検出され、減算部102Bにフィードバックされる。インバータ106はスイッチング素子として一般的にFETが用いられ、FETのブリッジ回路で構成されている。
【0006】
また、加算部102Aには補償部110から補償信号CMが加算されており、補償信号CMの加算によってシステム系の補償を行い、収れん性や慣性特性等を改善するようようになっている。補償部110は、セルフアライニングトルク(SAT)113と慣性112を加算部114で加算し、その加算結果に更に収れん性111を加算部115で加算し、加算部115の加算結果を補償信号CMとしている。
【0007】
モータ20が3相(U,V,W)ブラシレスモータの場合、PWM制御部105及びインバータ106の詳細は例えば図3に示すような構成となっている。PWM制御部105は、電圧指令値Eを所定式に従って3相分のPWMデューティ指令値D1〜D6を演算するデューティ演算部105Aと、PWMデューティ指令値D1〜D6でFET1〜FET6の各ゲートを駆動してON/OFFするゲート駆動部105Bとで構成されており、インバータ106は、U相の上段FET1及び下段FET4で成る上下アームと、V相の上段FET2及び下段FET5で成る上下アームと、W相の上段FET3及び下段FET6で成る上下アームとで成る3相ブリッジで構成されており、PWMデューティ指令値D1〜D6でON/OFFされることによってモータ20を駆動する。
【0008】
このような構成において、インバータ106の駆動電流ないしはモータ20のモータ電流を計測する必要があるが、コントロールユニット100のコンパクト化、軽量化、コストダウンの要求項目の1つとして、電流検出回路120の単一化(1シャント式電流検出回路)がある。電流検出回路の単一化として1シャント式電流検出回路が知られており、1シャント式の電流検出回路120の構成は例えば図4に示すようになっている(特開2009−131064号公報)。即ち、FETブリッジの底部アームと接地(GND)との間に1つのシャント抵抗R1が接続されており、FETブリッジに電流が流れたときのシャント抵抗R1による降下電圧を演算増幅器(差動増幅回路)121及び抵抗R2〜R4で電流値Imaに換算し、更に抵抗R6及びコンデンサC1で成るフィルタを経てA/D変換部122で所定のタイミングにA/D変換し、ディジタル値の電流値Imを出力するようになっている。なお、演算増幅器121の正端子入力には、抵抗R5を経て基準電圧となる2.5Vが接続されている。
【0009】
図5は電源(バッテリ)、インバータ106、電流検出回路120及びモータ20の結線図を示すと共に、U相の上段FET1がON(下段FET4はOFF)、V相の上段FET2がOFF(下段FET5はON)、W相の上段FET3がOFF(下段FET6はON)の状態時の電流経路(破線)を示している。また、図6は、U相の上段FET1がON(下段FET4はOFF)、V相の上段FET2がON(下段FET5はOFF)、W相の上段FET3がOFF(下段FET6はON)の状態時の電流経路(破線)を示している。これら図5及び図6の電流経路から分かるように、上段FETがONしている相の合計値が電流検出回路器120に検出電流として現れる。即ち、図5ではU相電流を検出することができ、図6ではU相及びV相電流を検出することができる。これは、電流検出回路120がインバータ106の上段アームと電源との間に接続されている場合も同様である。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開2009−131064号公報
【特許文献2】特開2009−232569号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
このように従来の装置(例えば特開2009−131064号公報)では電流検出回路が設けられているものの、電流検出回路が故障(異常を含む)したときの対策が施されていないため、操舵系の安全性向上の面から故障対策の実施が強く要請されている。
【0012】
また、一方では、インバータ内のFETの短絡故障による過電流故障を検出するために、電流検出回路の後段にダイオードを用いてピークホールドを行うような回路が提案されている(特開2009−232569号公報)。しかしながら、演算増幅器の出力電圧をダイオードを介して充放電用コンデンサに電荷を充電する場合、コンデンサへの充電電流が演算増幅器の負荷電流となるため、充電電流(負荷電流)が大きい場合、演算増幅器の応答性が低下してしまい、電流検出回路及びピークホールド回路の検出精度が悪化するという問題がある。
【0013】
本発明は上述のような事情からなされたものであり、本発明の目的は、1シャント式電流検出回路でモータ各相電流の検出を行うと共に、電流検出回路の故障や異常の診断を簡易な構成で確実に行い、安全性を一層高めた電動パワーステアリング装置を提供することにある。
【課題を解決するための手段】
【0014】
本発明は、操舵トルク及び車速に基づいて電流指令値を演算し、前記電流指令値に基づいてFETブリッジで成るインバータを介して多相のモータを駆動し、前記モータの駆動制御によって操舵系をアシスト制御する電動パワーステアリング装置に関し、本発明の上記目的は、前記インバータに接続された1つのシャント抵抗と、前記シャント抵抗の両端に正方向に接続され、前記モータの相電流を検出して前記アシスト制御の制御用モータ電流検出値とする制御用モータ電流検出回路と、前記シャント抵抗の両端に逆方向に接続され、前記制御用モータ電流検出回路の故障を検出するための診断用モータ電流検出回路とを具備し、1シャント式で前記モータの各相電流を検出して前記アシスト制御を行うと共に、前記シャント抵抗の両端電圧を増幅する回路を2系統とすることにより達成される。
【0015】
また、本発明の上記目的は、前記制御用モータ電流検出回路により検出された制御用モータ電流検出値と、前記診断用モータ電流検出回路により検出された診断用モータ電流検出値とを比較することにより、前記制御用モータ電流検出回路又は前記診断用モータ電流検出回路のいずれかが故障していることを検出することにより、或いは前記診断用モータ電流検出回路の後段に接続された最大電流検出回路を具備し、前記最大電流検出回路は、前記診断用モータ電流検出回路から出力される診断用モータ電流検出電圧のピークを一定時間ホールドするようになっていることにより、或いは前記最大電流検出回路を、ピークホールド用トランジスタと、充放電時定数を生成する抵抗及びコンデンサとで構成し、前記診断用モータ電流検出回路の出力を前記トランジスタのベースに入力し、前記トランジスタのエミッタと前記抵抗及びコンデンサとの間に充電抵抗を介挿することにより、或いは前記最大電流検出回路により検出された最大電流検出値と、前記制御用モータ電流検出回路により検出された制御用モータ電流検出値と、前記診断用モータ電流検出回路により検出された診断用モータ電流検出値とを比較することにより、前記制御用モータ電流検出回路、前記診断用モータ電流検出回路、前記最大電流検出回路のいずれかの故障、異常を診断するようになっていることにより、或いは前記診断用モータ電流検出回路は、前記診断用モータ電流検出回路の出力電圧が、前記シャント抵抗を流れる電流が0のときの電圧を基準として、電流が電源側から接地側に流れるときに、前記電流の大きさに応じて上昇するようになっていることにより、或いは前記制御用モータ電流検出回路は、前記制御用モータ電流検出回路の出力電圧が、前記シャント抵抗を流れる電流が0のときの電圧を基準として、電流が電源側から接地側に流れるときに、前記電流の大きさに応じて低下するようになっていることにより、或いは前記制御用モータ電流検出回路により検出された制御用モータ電流検出電圧と、前記診断用モータ電流検出回路で検出された診断用モータ電流検出電圧との和が、正常時には前記電流に関係なく一定電圧となっていることにより、より効果的に達成される。
【発明の効果】
【0016】
本発明によれば、安価な1シャント式電流検出回路(制御用モータ電流検出回路)を用いながら、診断用モータ電流検出回路は演算増幅器(差動増幅回路)で構成され、最大電流検出回路はピークホールド用トランジスタ、充放電時定数を生成する抵抗、コンデンサで構成され、診断用モータ電流検出回路の演算増幅器の出力をトランジスタのベースに入力し、充放電コンデンサを充電抵抗を介してトランジスタのエミッタに接続することにより、ダイオードを用いた場合(特許文献2)と同様のピークホールド機能を有しながら演算増幅器の負荷電流を小さくすることができ、演算増幅器の出力負荷電流による出力応答の低下を防止することができ、電流検出回路の精度悪化を防止することができる。
【0017】
また、本発明によれば、制御用モータ電流検出回路により検出された制御用モータ電流検出値と、診断用モータ電流検出回路により検出された診断用モータ電流検出値とを比較することにより、いずれかのモータ電流検出回路の故障であるかを検出することができる。診断用モータ電流検出回路の後段に、診断用モータ電流検出回路から出力される診断用モータ電流検出電圧のピークを一定時間ホールドする最大電流検出回路を接続しているので、最大電流検出値を監視することにより、例えばインバータ内のFET短絡故障等の過電流故障を検出することができる。更に本発明によれば、最大電流検出回路により検出された最大電流検出値と、制御用モータ電流検出値、診断用モータ電流検出値とを比較することにより、いずれかの回路が故障したことを検出することができるので、故障箇所の判定によってアシスト制御を継続することも可能である。
【図面の簡単な説明】
【0018】
【図1】一般的な電動パワーステアリング装置の構成例を示す図である。
【図2】コントロールユニットの一例を示すブロック構成図である。
【図3】PWM制御部及びインバータの構成例を示す結線図である。
【図4】1シャント式電流検出器の構成例を示す結線図である。
【図5】1シャント式電流検出器を備えたインバータの動作例を示す電流経路図である。
【図6】1シャント式電流検出器を備えたインバータの動作例を示す電流経路図である。
【図7】本発明の構成例を示す結線図である
【図8】本発明の動作例を示すフローチャートの一部である。
【図9】本発明の動作例を示すフローチャートの一部である。
【図10】他の異常検出方法を説明するための図である。
【発明を実施するための形態】
【0019】
本発明は、インバータと接地(GND)間に1個のシャント抵抗を接続し、シャント抵抗の両端電圧からモータ電流を検出する電流検出回路であり、シャント抵抗の両端電圧を増幅する回路は、モータ制御に使用する制御用モータ電流検出回路と、制御用モータ電流検出回路の故障(異常を含む)を検出するための診断用モータ電流検出回路の2回路で構成され、制御用モータ電流検出回路により検出された制御用モータ電流検出値と、診断用モータ電流検出回路により検出された診断用モータ電流検出値とを比較することにより、制御用モータ電流検出回路の故障を検出する。
【0020】
診断用モータ電流検出回路は、診断用モータ電流検出回路の出力電圧が、シャント抵抗を流れる電流が0の時の電圧を基準として、電流が電源側から接地(GND)側に流れるときに、その電流の大きさに応じて上昇するように構成し、更に診断用モータ電流検出回路の後段に、診断用モータ電流検出回路から出力される診断用モータ電流検出電圧のピークを一定時間ホールドする最大電流検出回路を接続し、その最大電流検出値を監視することにより、例えばインバータ内のFET短絡故障等の過電流故障を検出する。
【0021】
また、制御用モータ電流検出回路は、制御用モータ電流検出回路の出力電圧が、シャント抵抗を流れる電流が0の時の電圧を基準として、電流が電源側から接地側に流れるときに、その電流の大きさに応じて低下する構成とし、制御用モータ電流検出回路により検出された制御用モータ電流検出電圧と、診断用モータ電流検出回路により検出された診断用モータ電流検出電圧との和は、正常時には電流に関わらず一定電圧になるように構成し、制御用モータ電流検出電圧と診断用モータ電流検出電圧の和であるモータ電流検出電圧和を監視することで、制御用モータ電流検出電圧又は診断用モータ電流検出電圧が故障により、正常な電圧を出力できないなどの異常を検出する。
【0022】
また、本発明によれば、最大電流検出回路により検出された最大電流検出値と、制御用モータ電流検出値、診断用モータ電流検出値を比較することにより、いずれかの回路が故障したことを検出することができ、電動パワーステアリング装置の安全性を一層高めることができる。
【0023】
以下に、本発明の実施形態を図面を参照して詳細に説明する。
【0024】
図7は本発明の構成例を図4に対応させて示しており、図4における電流検出回路120は、本発明では制御用モータ電流検出回路として機能し、シャント抵抗R1の両端には制御用モータ電流検出回路120が接続され、シャント抵抗R1の両端には更に診断用モータ電流検出回路130が接続され、診断用モータ電流検出回路130の後段には最大電流検出回路140が接続されている。
【0025】
制御用モータ電流検出回路120は演算増幅器(差動増幅回路)121で構成され、その出力電圧はシャント抵抗R1を流れる電流が0のときの電圧が2.5Vとなり、電流が電源側から接地側に流れるときを正電流とすると、正電流が流れた場合にその電流の大きさに応じて2.5Vから低下するようになっている。例えば正方向に100A流れた場合、出力電圧は、2.5V電圧に対して2V低下して0.5Vとなり、負方向に100A流れた場合、2.5Vに対して2V低下して0.5Vとなる。制御用モータ電流検出回路120により検出された制御用モータ電流検出電圧は、任意のタイミングでCPU(MCU等を含む)によりA/D変換部122によるA/D変換後に物理値Imに変換され、モータ電流を制御するために使用される。
【0026】
診断用モータ電流検出回路130は演算増幅器(差動増幅回路)131で構成され、その出力電圧(演算増幅器131の出力)はシャント抵抗R1を流れる電流が0のときの電圧が2.5Vとなり、電流が電源側から接地側に流れるときを正電流とすると、正電流が流れた場合にその電流の大きさに応じて2.5Vから上昇するようになっている。例えば正方向に100A流れた場合、出力電圧は、2.5V電圧に対して2V低下して0.5Vとなり、負方向に100A流れた場合、2.5Vに対して2V上昇して1.0Vとなる。診断用モータ電流検出回路130により検出された診断用モータ電流検出電圧は、任意のタイミングでCPU(MCU等を含む)によりA/D変換部132によるA/D変換後に物理値(Is)に変換され、制御用モータ電流検出値の異常を検出するために使用される。
【0027】
なお、制御用モータ電流検出回路120の演算増幅器121の負入力端子には、シャント抵抗R1の上部電圧が入力抵抗R2を経て入力され(正方向)、診断用モータ電流検出回路130の演算増幅器131の負入力端子には、シャント抵抗R1の下部電圧が入力抵抗R11を経て入力されている(逆方向)。
【0028】
最大電流検出回路140はトランジスタQ1、充放電用コンデンサC21、充電抵抗R31、放電抵抗R32で構成され、診断用モータ電流検出回路130の出力電圧(演算増幅器131の出力)に対し、トランジスタQ1のベース・エミッタ電圧Vbe低下した電圧よりも充放電用コンデンサC21の電圧が小さい場合(充電時)は、診断用モータ電流検出回路130の出力電圧に対し、トランジスタQ1のベース・エミッタ電圧Vbe低下した電圧となるように、充電抵抗R31と充放電用コンデンサC21の時定数に応じて、充放電用コンデンサC21に電荷が充電される。診断用モータ電流検出回路130の出力電圧に対し、トランジスタQ1のベース・エミッタ電圧Vbe低下した電圧よりも充放電用コンデンサC21の電圧が大きい場合(放電時)は、放電抵抗R32と充放電用コンデンC21の時定数に応じて、充放電用コンデンサC21から電荷が放電される。
【0029】
抵抗R33及びコンデンサC22はフィルタを構成しており、ノイズが除去された出力がA/D変換部141でA/D変換され、ディジタル値Ixとして出力される。
【0030】
特許文献2に示されているようなダイオードを用いたピークホールド回路の場合、演算増幅器の出力電圧をダイオードを介して充放電用コンデンサに電荷を充電する構成であるため、コンデンサへのmAオーダの充電電流が演算増幅器の負荷電流となり、演算増幅器の応答性が低下し、電流検出回路及びピークホールド回路の検出精度が悪化する可能性があるが、本発明のように演算増幅器の出力をトランジスタのベースで入力する構成の場合、負荷電流はμAオーダに低減できるため、演算増幅器の応答性への影響を回避できる。
【0031】
また、最大電流検出回路140は、診断用モータ電流検出回路130の出力電圧を放電抵抗R32及び充放電用コンデンC21でピークホールドする構成となっている。シャント抵抗R1に流れる電流がインバータの電源側から接地側に流れるときの正の電流をピークホールドする回路であるため、インバータのアーム短絡による過電流を検出するだけでなく、例えば下段FETが短絡故障し、上段FETが20KHzでPWM駆動している場合に発生する瞬間(50μs以下)かつ断続的(20KHz周期)な過電流のピークを一定時間ホールドする。ピークホールドされた電圧は、任意のタイミングでCPUによりA/D変換部141によるA/D変換後に物理値(Ix)に変換され、最大電流の異常診断や制御用モータ電流検出回路120及び診断用モータ電流検出回路130の故障診断のために使用される。
【0032】
抵抗R32及びコンデンサC21で生成される充放電時定数は上述のことを考慮してμsオーダが望ましく、放電時定数は50μs間は確実にピーク値をホールドできる200μs〜1msが望ましい。
【0033】
このような構成において、その動作例を図8及び図9のフローチャートを参照して説明する。
【0034】
先ず制御用モータ電流検出値Imを入力し(ステップS1)、次いで診断用モータ電流検出値Isを入力する(ステップS2)。この入力の順番は逆であっても良い。制御用モータ電流検出値Imと診断用モータ電流検出値Isは、正常であれば同じ電流検出値を示すが、制御用モータ電流検出回路120又は診断用モータ電流検出回路130のオフセット電圧が変化するような故障や、ゲインが変化するような故障(異常を含む)が発生した場合は、制御用モータ電流検出値Imと診断用モータ電流検出値Isには差が発生する。そのため、制御用モータ電流検出値Imと診断用モータ電流検出値Isとの差を算出し(ステップS3)、差が所定値、例えば±10A以上であるか否かを判定し(ステップS4)、差が±10A以上であれば異常(故障を含む)と判定する(ステップS10)。
【0035】
異常と判定された場合はインバータへの通電を停止し(ステップS11)、アシスト制御を停止する(ステップS12)。
【0036】
一方、上記ステップS4において、差が±10Aより小さいと判定された場合には、更に最大電流検出回路140により検出された最大電流検出値Ixを入力して監視し(ステップS5)、最大電流検出値Ixが所定値、例えば150A以上であるか否かを判定する(ステップS6)。最大電流検出値Ixが150A以上である場合は、インバータの過電流故障(例えばFET短絡)が発生したと判定し、異常(故障を含む)を検出し(ステップS10)、上述と同様に電流通電を停止し(ステップS11)、アシストを停止させる(ステップS12)。
【0037】
最大電流検出値Ixが150Aよりも小さい場合には、更に以下の診断を行う。即ち、最大電流検出値Ix、制御用モータ電流検出値Im、診断用モータ電流検出値Isはシャント抵抗R1に流れる電流を検出するということで互いに相関性があるため、各々の電流検出値を比較することで、どの電流検出回路が故障したかを診断することができる。具体的には、次のような比較の判定(a)〜(c)を行い、それぞれ一定値以上の差がある場合は異常、それ以外は正常と判定する。
(a)最大電流検出値Ixと制御用モータ電流検出値Imの比較、つまり最大電流検出値Ixと制御用モータ電流検出値Imの差を算出し(ステップS20)、その差が所定値α以上であるか否かを判定する(ステップS21)。
(b)制御用モータ電流検出値Imと診断用モータ電流検出値Isの比較、つまり制御用モータ電流検出値Imと診断用モータ電流検出値Isの差を算出し(ステップS22)、その差が所定値β以上であるか否かを判定する(ステップS23)。
(c)診断用モータ電流検出値Isと最大電流検出値Ixの比較、つまり診断用モータ電流検出値Isと最大電流検出値Ixの差を算出し(ステップS24)、その差が所定値γ以上であるか否かを判定する(ステップS25)。
上記判定(a)〜(c)において、各差が全てそれぞれの所定値よりも小さい場合には、全て正常と判定する(ステップS26)。
【0038】
そして、上記判定(a)〜(c)において、各差がそれぞれの所定値以上となった場合には、異常部位の判定を行う(ステップS30)。即ち、判定(a)が異常、判定(b)が異常、判定(c)が正常の場合には、制御用モータ電流検出値Imが異常と判定する。また、判定(a)が正常、判定(b)が異常、判定(c)が異常の場合には診断用モータ電流検出値Isが異常と判定し、判定(a)が異常、判定(b)が正常、判定(c)が異常の場合には最大電流検出値Ixが異常と判定する。最大電流検出回路140は診断用モータ電流検出回路130の後段に接続されているため、診断用モータ電流検出回路130が故障した場合は、最大電流検出値Ixも異常な出力となる場合がある。その場合には、判定(a)が異常、判定(b)が異常、判定(c)が異常となる。
【0039】
上記判定(a)〜(c)において、制御用モータ電流検出値Imのみが異常と判定される場合((a)異常、(b)異常、(c)正常)、モータの電流制御用に制御用モータ電流検出値Imを使用せず、バックアップ制御としてのオープンループで電流制御を継続し(ステップS32)、アシストを継続する(ステップS33)。それ以外の場合は、最大電流検出回路140が異常の可能性があり、インバータの故障を検出できなくなる可能性が高いため、上記ステップS10にリターンして電流制御を停止し(ステップS11)、アシストを停止させる(ステップS12)。
【0040】
その他の異常検出方法としては、制御用モータ電流検出回路120の出力電圧と診断用モータ電流検出回路130の出力電圧の和は、図10に示すように正常時は一定値(5V)となるため、その和が例えば5.3V以上又は4.7V以下であれば異常と判定するようにしても良い。
【0041】
また、制御用モータ電流検出回路120、診断用モータ電流検出回路130、最大電流検出回路140はいずれも図7の構成に限定されるものではなく、同一の機能、作用を有する形態であれば良い。更に、上述では3相モータについて説明したが、本発明は2相その他のモータについても同様に適用することができる。また、上述では補償部が設けられた電動パワーステアリング装置を説明しているが、補償部は必ずしも必要なものではない。
【符号の説明】
【0042】
1 ハンドル
2 コラム軸(ステアリングシャフト)
10 トルクセンサ
12 車速センサ
20 モータ
100 コントロールユニット
101 電流指令値演算部
103 電流制限部
104 電流制御部
105 PWM制御部
106 インバータ
110 補償部
120 電流検出回路(制御用モータ電流検出回路)
121,131 演算増幅器(差動増幅回路)
122 A/D変換部
130 診断用モータ電流検出回路
140 最大電流検出回路
【特許請求の範囲】
【請求項1】
操舵トルク及び車速に基づいて電流指令値を演算し、前記電流指令値に基づいてFETブリッジで成るインバータを介して多相のモータを駆動し、前記モータの駆動制御によって操舵系をアシスト制御する電動パワーステアリング装置において、
前記インバータに接続された1つのシャント抵抗と、前記シャント抵抗の両端に正方向に接続され、前記モータの相電流を検出して前記アシスト制御の制御用モータ電流検出値とする制御用モータ電流検出回路と、前記シャント抵抗の両端に逆方向に接続され、前記制御用モータ電流検出回路の故障を検出するための診断用モータ電流検出回路とを具備し、
1シャント式で前記モータの各相電流を検出して前記アシスト制御を行うと共に、前記シャント抵抗の両端電圧を増幅する回路を2系統としたことを特徴とする電動パワーステアリング装置。
【請求項2】
前記制御用モータ電流検出回路により検出された制御用モータ電流検出値と、前記診断用モータ電流検出回路により検出された診断用モータ電流検出値とを比較することにより、前記制御用モータ電流検出回路又は前記診断用モータ電流検出回路のいずれかが故障していることを検出する請求項1に記載の電動パワーステアリング装置。
【請求項3】
前記診断用モータ電流検出回路の後段に接続された最大電流検出回路を具備し、前記最大電流検出回路は、前記診断用モータ電流検出回路から出力される診断用モータ電流検出電圧のピークを一定時間ホールドするようになっている請求項1又は2に記載の電動パワーステアリング装置。
【請求項4】
前記最大電流検出回路は、ピークホールド用トランジスタと、充放電時定数を生成する抵抗及びコンデンサとで構成され、前記診断用モータ電流検出回路の出力を前記トランジスタのベースに入力し、前記トランジスタのエミッタと前記抵抗及びコンデンサとの間に充電抵抗を介挿した請求項3に記載の電動パワーステアリング装置。
【請求項5】
前記最大電流検出回路により検出された最大電流検出値と、前記制御用モータ電流検出回路により検出された制御用モータ電流検出値と、前記診断用モータ電流検出回路により検出された診断用モータ電流検出値とを比較することにより、前記制御用モータ電流検出回路、前記診断用モータ電流検出回路、前記最大電流検出回路のいずれかの故障、異常を診断するようになっている請求項3又は4に記載の電動パワーステアリング装置。
【請求項6】
前記診断用モータ電流検出回路は、前記診断用モータ電流検出回路の出力電圧が、前記シャント抵抗を流れる電流が0のときの電圧を基準として、電流が電源側から接地側に流れるときに、前記電流の大きさに応じて上昇するようになっている請求項1乃至5のいずれかに記載の電動パワーステアリング装置。
【請求項7】
前記制御用モータ電流検出回路は、前記制御用モータ電流検出回路の出力電圧が、前記シャント抵抗を流れる電流が0のときの電圧を基準として、電流が電源側から接地側に流れるときに、前記電流の大きさに応じて低下するようになっている請求項1乃至6のいずれかに記載の電動パワーステアリング装置。
【請求項8】
前記制御用モータ電流検出回路により検出された制御用モータ電流検出電圧と、前記診断用モータ電流検出回路で検出された診断用モータ電流検出電圧との和が、正常時には前記電流に関係なく一定電圧となっている請求項7に記載の電動パワーステアリング装置。
【請求項1】
操舵トルク及び車速に基づいて電流指令値を演算し、前記電流指令値に基づいてFETブリッジで成るインバータを介して多相のモータを駆動し、前記モータの駆動制御によって操舵系をアシスト制御する電動パワーステアリング装置において、
前記インバータに接続された1つのシャント抵抗と、前記シャント抵抗の両端に正方向に接続され、前記モータの相電流を検出して前記アシスト制御の制御用モータ電流検出値とする制御用モータ電流検出回路と、前記シャント抵抗の両端に逆方向に接続され、前記制御用モータ電流検出回路の故障を検出するための診断用モータ電流検出回路とを具備し、
1シャント式で前記モータの各相電流を検出して前記アシスト制御を行うと共に、前記シャント抵抗の両端電圧を増幅する回路を2系統としたことを特徴とする電動パワーステアリング装置。
【請求項2】
前記制御用モータ電流検出回路により検出された制御用モータ電流検出値と、前記診断用モータ電流検出回路により検出された診断用モータ電流検出値とを比較することにより、前記制御用モータ電流検出回路又は前記診断用モータ電流検出回路のいずれかが故障していることを検出する請求項1に記載の電動パワーステアリング装置。
【請求項3】
前記診断用モータ電流検出回路の後段に接続された最大電流検出回路を具備し、前記最大電流検出回路は、前記診断用モータ電流検出回路から出力される診断用モータ電流検出電圧のピークを一定時間ホールドするようになっている請求項1又は2に記載の電動パワーステアリング装置。
【請求項4】
前記最大電流検出回路は、ピークホールド用トランジスタと、充放電時定数を生成する抵抗及びコンデンサとで構成され、前記診断用モータ電流検出回路の出力を前記トランジスタのベースに入力し、前記トランジスタのエミッタと前記抵抗及びコンデンサとの間に充電抵抗を介挿した請求項3に記載の電動パワーステアリング装置。
【請求項5】
前記最大電流検出回路により検出された最大電流検出値と、前記制御用モータ電流検出回路により検出された制御用モータ電流検出値と、前記診断用モータ電流検出回路により検出された診断用モータ電流検出値とを比較することにより、前記制御用モータ電流検出回路、前記診断用モータ電流検出回路、前記最大電流検出回路のいずれかの故障、異常を診断するようになっている請求項3又は4に記載の電動パワーステアリング装置。
【請求項6】
前記診断用モータ電流検出回路は、前記診断用モータ電流検出回路の出力電圧が、前記シャント抵抗を流れる電流が0のときの電圧を基準として、電流が電源側から接地側に流れるときに、前記電流の大きさに応じて上昇するようになっている請求項1乃至5のいずれかに記載の電動パワーステアリング装置。
【請求項7】
前記制御用モータ電流検出回路は、前記制御用モータ電流検出回路の出力電圧が、前記シャント抵抗を流れる電流が0のときの電圧を基準として、電流が電源側から接地側に流れるときに、前記電流の大きさに応じて低下するようになっている請求項1乃至6のいずれかに記載の電動パワーステアリング装置。
【請求項8】
前記制御用モータ電流検出回路により検出された制御用モータ電流検出電圧と、前記診断用モータ電流検出回路で検出された診断用モータ電流検出電圧との和が、正常時には前記電流に関係なく一定電圧となっている請求項7に記載の電動パワーステアリング装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2013−110864(P2013−110864A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2011−254232(P2011−254232)
【出願日】平成23年11月21日(2011.11.21)
【出願人】(000004204)日本精工株式会社 (8,378)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成23年11月21日(2011.11.21)
【出願人】(000004204)日本精工株式会社 (8,378)
【Fターム(参考)】
[ Back to top ]