
電動作業機
【課題】移動開始場所から移動終了場所まで移動し、移動終了場所での作業を終了した後に、移動終了場所から移動開始場所まで戻る必要がある場合において、戻る途中にバッテリの残量を切らさないようにすることができる電動作業機を提供することにある。
【解決手段】走行用の電動モータ6と、電動モータ6に電力を供給するバッテリ9とを備えた電動作業機であって、バッテリ9の電力の残量を検出する残量検出手段9Aと、移動走行の開始を示す開始信号を出力する開始信号出力手段45Aと、移動走行の終了を示す終了信号を出力する終了信号出力手段45Bと、開始信号から終了信号までの間で消費されたバッテリ9の電力を検出して記憶する記憶手段9B,44とを備え、終了信号が出力されてからにおいて、残量検出手段9Aの検出値と前記記憶手段9B,44に記憶された検出値とに基づいて作業終了時期を報知する報知手段を備えてある電動作業機とした。
【解決手段】走行用の電動モータ6と、電動モータ6に電力を供給するバッテリ9とを備えた電動作業機であって、バッテリ9の電力の残量を検出する残量検出手段9Aと、移動走行の開始を示す開始信号を出力する開始信号出力手段45Aと、移動走行の終了を示す終了信号を出力する終了信号出力手段45Bと、開始信号から終了信号までの間で消費されたバッテリ9の電力を検出して記憶する記憶手段9B,44とを備え、終了信号が出力されてからにおいて、残量検出手段9Aの検出値と前記記憶手段9B,44に記憶された検出値とに基づいて作業終了時期を報知する報知手段を備えてある電動作業機とした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、走行用の電動モータと、電動モータに電力を供給するバッテリとを備えた電動作業機に関する。
【背景技術】
【0002】
作業機において、バッテリと、バッテリの電力を受けて駆動する電動モータと、駆動輪とを備え、電動モータから出力される回転動力を駆動輪へ伝達して走行するように構成されている電動作業機がある。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2002−354611号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記構成の電動作業機で、移動開始場所(例えばバッテリの充電場所)から移動終了場所(例えば作業場所)まで移動し、移動終了場所にて作業を行ない、作業を終了した後に再び移動開始場所に戻る必要がある場合、戻るために必要な電力をバッテリに残しておかなければならない。
しかし、上記構成の電動作業機では、バッテリにどの程度の電力を残しておけば、移動開始場所までバッテリの電力を切らさずに戻れるのかがわからない。
そのため、電動作業機の使用者は、不正確な予想によって移動終了場所での作業を終了することになるため、作業をしすぎてバッテリの残量が足りなくなり、移動開始場所まで戻る途中に電動作業機がバッテリ切れで移動走行不能になる虞がある。
【0005】
本発明の目的は、移動終了場所での作業終了後に、移動終了場所から移動開始場所まで戻る必要がある場合において、戻る途中にバッテリの残量を切らさないようにすることができる電動作業機を提供することにある。
【課題を解決するための手段】
【0006】
[I]
(構成)
本発明の第1特徴は、電動作業機において次のように構成することにある。
走行用の電動モータと、前記電動モータに電力を供給するバッテリとを備え、
前記バッテリの電力の残量を検出する残量検出手段と、移動走行の開始を示す開始信号を出力する開始信号出力手段と、移動走行の終了を示す終了信号を出力する終了信号出力手段と、前記開始信号から前記終了信号までの間で消費された前記バッテリの電力を検出して記憶する記憶手段とを備え、
前記終了信号が出力されてからにおいて、前記残量検出手段の検出値と前記記憶手段に記憶された検出値とに基づいて作業終了時期を報知する報知手段を備えてある。
【0007】
(作用及び発明の効果)
請求項1に記載の、記憶手段によって記憶された検出値、即ち、前記開始信号から前記終了信号までの間で消費されたバッテリの電力(以下、移動消費電力と称する)は、移動走行の開始を示す開始信号が出力された場所(移動開始場所)から、移動走行の終了を示す終了信号が出力された場所(移動終了場所)まで移動走行するために必要な電力である。
なお、移動消費電力は、移動終了場所から移動開始場所まで戻るために必要な電力(以下、帰路必要電力と称する)でもある。
本発明の電動作業機は、残量検出手段の検出値(バッテリの残量)と、記憶手段に記憶された検出値(移動消費電力=帰路必要電力)とに基づいて作業終了時期を報知する報知手段を備えてある。
これによると、使用者は、報知手段が作業終了時期を報知することで、帰路必要電力を残すまでバッテリの電力が消費されたことを知り、その状態で作業を終了することができるので、移動開始場所まで戻る途中にバッテリの残量が切れ、電動作業機が移動走行不能になる虞を抑制することができる。
【0008】
[II]
(構成)
本発明の第2特徴は、本発明の第1特徴の電動作業機において次のように構成することにある。
前記残量検出手段の検出値を表示する表示手段を備えて、
前記記憶手段に記憶された検出値を前記表示手段に表示することにより前記作業終了時期を報知するように、前記報知手段を構成してある。
【0009】
(作用及び発明の効果)
本発明の第2特徴を備える電動作業機によると、使用者は、表示手段に表示された残量検出手段の検出値(バッテリの残量)と、記憶手段に記憶された検出値(移動消費電力=帰路必要電力)とを比較することができる。
そのため、使用者は、報知手段を構成する表示手段によって帰路必要電力をバッテリに残した状態で作業を終了することができるので、戻る途中にバッテリの残量が切れ、電動作業機が移動走行不能になる虞を抑制することができる。
【0010】
[III]
(構成)
本発明の第3特徴は、本発明の第1特徴の電動作業機において次のように構成することにある。
前記残量検出手段の検出値が前記記憶手段に記憶された検出値となったことを音声又は表示により報知することにより前記作業終了時期を報知するように、前記報知手段を構成してある。
【0011】
(作用及び発明の効果)
本発明の第3特徴を備える電動作業機によると、報知手段を構成する音声又は表示によって、残量検出手段の検出値(バッテリの残量)が記憶手段に記憶された検出値(移動消費電力=帰路必要電力)となった作業終了時期が報知される。
そのため、使用者は、音声又は表示によって作業終了時期が報知されることで、帰路必要電力を残すまでバッテリの電力が消費されたことを知り、その状態で作業を終了することができ、戻る途中にバッテリの残量が切れ、電動作業機が移動走行不能になる虞を抑制することができる。
【0012】
[IV]
(構成)
本発明の第4特徴は、本発明の第1から第3特徴の電動作業機のうちのいずれか一つにおいて次のように構成することにある。
機体に備えられた作業装置の停止状態で走行を開始したことに基づいて前記開始信号を出力するように、前記開始信号出力手段が構成され、
前記作業装置が作動状態となったことに基づいて前記終了信号を出力するように、前記終了信号出力手段が構成されている。
【0013】
(作用及び発明の効果)
本発明の第4特徴によると、使用者が移動開始場所から移動終了場所に移動して、移動終了場所にて作業を行なうとき、開始信号出力手段及び終了信号出力手段によって自動的に開始信号及び終了信号とが出力されるので、記憶手段にバッテリの移動消費電力(帰路必要電力)の検出と記憶とを行なわせる手順を簡略化することができる。
【図面の簡単な説明】
【0014】
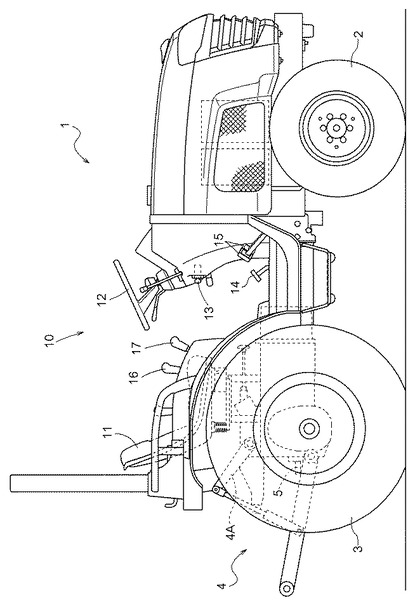
【図1】電動トラクタの全体を示す右側面図である。
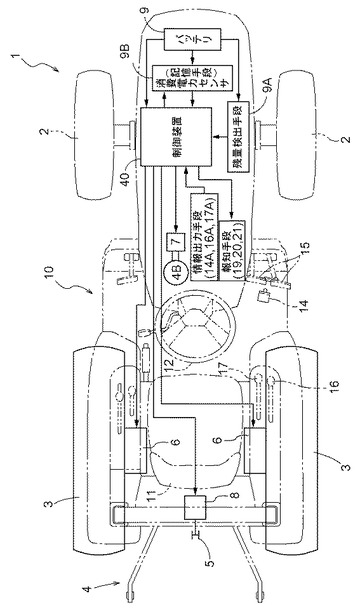
【図2】電動トラクタの制御構成を示す概略平面図である。
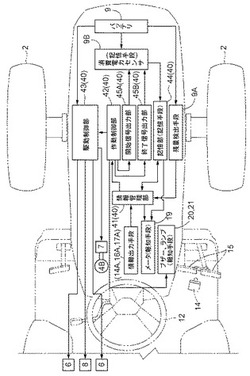
【図3】電動トラクタの制御構成を示す概略平面図である。
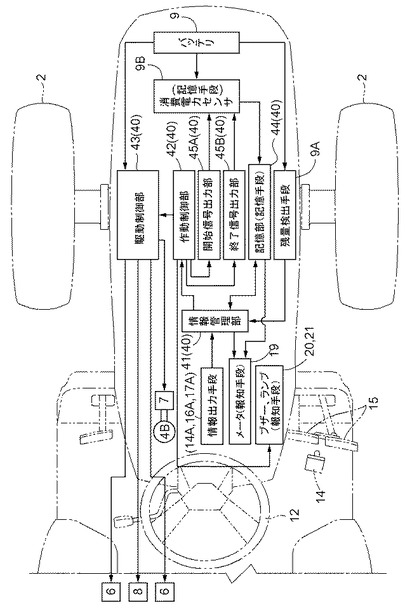
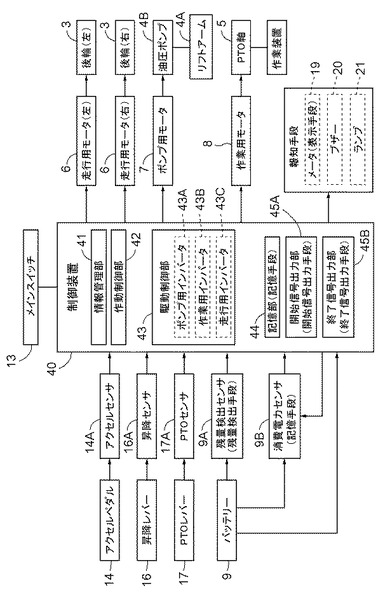
【図4】電動トラクタの制御構成を示すブロック図である。
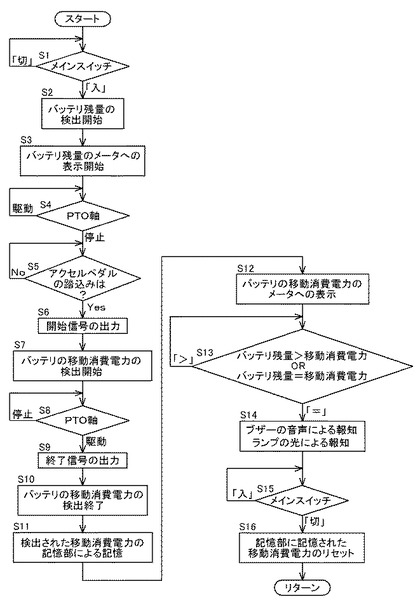
【図5】報知手段によって作業終了時期が報知されるまでの流れを示す図である。
【発明を実施するための形態】
【0015】
(電動作業機の全体構成)
図1,2に示すように、本実施形態で例示する電動作業機は、電動トラクタ1であり、操向輪としての左右一対の前輪2と、駆動輪としての左右一対の後輪3とが備えられている。
【0016】
電動トラクタ1の後部には、耕耘ロータリーやプラウなどのような駆動型の作業装置(図示しない)を昇降揺動可能に取り付けることができる連結装置4と、作業用の動力を外部へ供給可能なPTO軸5とが備えられてあり、連結装置4に取り付けられた作業装置は、PTO軸5に連結することで駆動させることができる。
【0017】
また、電動トラクタ1の後半部には、使用者が電動トラクタ1を操作するときに搭乗する運転部10が形成されてあり、運手部10は、使用者が座る運転座席11と、運転座席11の前方に設けられ、左右の前輪2を操向操作することのできるステアリングホイール12と、踏み込み操作量を変化させることで電動トラクタ1の走行速度を調整できるアクセルペダル14と、走行する電動トラクタ1を、踏み込み操作によって制動することができる左右一対のブレーキペダル15とが備えられている。
他にも、運転部10には、連結装置4のリフトアーム4Aを昇降させることで、連結装置4に連結した作業装置を昇降揺動自在に操作できる昇降レバー16と、PTO軸5を駆動及び停止自在に切り替え操作できるPTOレバー17などの操作具と、後述の制御装置40を起動及び停止自在なキー操作式のメインスイッチ13と、後述の報知手段とが備えられている。
【0018】
(電動モータ,バッテリ)
図1乃至図4に示すように、電動トラクタ1には、左右一対の後輪3を駆動する左右一対のインホイール型の電動モータ(以下、走行用モータ6と称する)と、リフトアーム4Aを昇降させる油圧式のリフトシリンダ(図示せず)にオイルを供給する油圧ポンプ4Bを駆動するポンプ用の電動モータ(以下、ポンプ用モータ7と称する)と、PTO軸5を駆動する電動モータ(以下、作業用モータ8と称する)とが備えられている。
また、各モータ6,7,8は、交流モータであり、電動トラクタ1には、各モータ6,7,8に電力を供給するバッテリ9が備えられている。
【0019】
(制御装置)
図2乃至図4に示すように、電動トラクタ1には、マイクロコンピュータなどを搭載した複数の電子制御ユニットなどで構成した制御装置40が搭載されてあり、制御装置40は、運転部10に備えられているキー操作式の前記メインスイッチ13を、「入」操作すると通電されて起動し、「切」操作すると通電されず停止するように構成されている。
【0020】
図2乃至図4に示すように、制御装置40には、情報出力手段である各種センサからの出力情報を管理し、その情報を後述の作動制御部42に出力する情報管理部41と、情報管理部41からの情報に適した制御指令を後述の駆動制御部43などに出力する作動制御部42と、作動制御部42からの制御指令に基づいて、バッテリ9から各モータ6,7,8に供給される電力量などを制御するインバータを有する駆動制御部43とが備えられている。
【0021】
(駆動制御部)
図4に示すように、駆動制御部43は、インバータとして、ポンプ用モータ7に供給される電力量などを制御するポンプ用インバータ43Aと、作業用モータ8に供給される電力量などを制御する作業用インバータ43Bと、走行用モータ6に供給される電力量などを制御する走行用インバータ43Cとを有し、図2乃至図4に示すように、各インバータ43A,43B,43Cによって各モータ6,7,8を適正に作動させるように構成されている。
【0022】
(情報出力手段:昇降センサ)
図1乃至図2に示すように、連結装置4(リフトアーム4A)を昇降操作可能な昇降レバー16は、前後移動操作可能に構成されている。
図2乃至図4に示すように、昇降レバー16には、昇降レバー16の操作位置を検出するポテンショメータからなる昇降センサ16Aが情報出力手段として備えられてあり、昇降センサ16Aは、検出した昇降レバー16の操作位置の情報を情報管理部41に出力する。その情報は、情報管理部41から作動制御部42に出力され、その情報に適した制御指令が作動制御部42から駆動制御部43のポンプ用インバータ43Aに出力される。そして、ポンプ用インバータ43Aは、その制御指令に基づいてバッテリ9から作業用モータ8に供給される電力量を制御し、その制御に適するようにポンプ用モータ7が駆動される。
つまり、上記のようにしてポンプ用モータ7が駆動されることにより、油圧ポンプ4Bからリフトシリンダにオイルが供給され、リフトシリンダの動きに連動して連結装置4(リフトアーム4A)が昇降レバー16の操作位置に対応した位置に上下揺動するようになっている。
【0023】
(情報出力手段:PTOセンサ)
図1乃至図2に示すように、PTOレバー17は、PTO軸5を駆動状態とする駆動位置及びPTO軸5を停止状態とする停止位置に亘って前後移動操作可能に構成されている。
PTOレバー17には、PTOレバー17の操作位置を検出するポテンショメータからなるPTOセンサ17Aが情報出力手段として備えられてあり、PTOセンサ17Aは、検出したPTOレバー17の操作位置の情報を情報管理部41に出力する。その情報は、情報管理部41から作動制御部42に出力され、その情報に適した制御指令が作動制御部42から駆動制御部43の作業用インバータ43Bに出力される。そして、作業用インバータ43Bは、その制御指令に基づいてバッテリ9から作業用モータ8に供給される電力量を制御し、その制御に適するように作業用モータ8が駆動及び停止される。
つまり、PTOレバー17が駆動位置及び停止位置に移動操作されることで、作業用モータ8が駆動及び停止され、作業用モータ8に連動してPTO軸17及び作業装置も駆動及び停止されるようになっている。
【0024】
(情報出力手段:アクセルセンサ)
図1乃至図3に示すように、アクセルペダル14は、踏み込み開始位置から踏み込み限界位置まで踏み込み操作可能であり、踏み込みを解除すると、踏み込み開始位置に自動復帰するように構成されている。
アクセルペダル14には、アクセルペダル14の踏み込み操作量を検出するポテンショメータからなるアクセルセンサ14Aが情報出力手段として備えられてあり、アクセルセンサ14Aは、検出したアクセルペダル14の踏み込み操作量の情報を情報管理部41に出力する。その情報は、情報管理部41から作動制御部42に出力され、その情報に適した制御指令が作動制御部42から駆動制御部43の走行用インバータ43Cに出力される。そして、走行用インバータ43Cが、その制御指令に基づいてバッテリ9から左右の走行用モータ6に供給される電力量を制御し、その制御に適するように左右の走行用モータ6が駆動される。
つまり、アクセルペダル14を踏み込み操作することで、左右の走行用モータ6が駆動し、走行用モータ6に連動して左右の後輪3も駆動するようになっている。具体的には、アクセルペダル14の踏み込み操作量が多いほど、左右の後輪3の回転速度も速くなるように構成されている。
【0025】
(制御装置)
図3,4に示すように、制御装置40には、情報管理部41、作動制御部42及び駆動制御部43の他にも、作動制御部42から出される制御指令に基づいて、電動トラクタ1の移動走行の開始を示す開始信号を出力する開始信号出力手段としての開始信号出力部45Aと、作動制御部42から出される制御指令に基づいて、電動トラクタ1の移動走行の終了を示す終了信号を出力する終了信号出力手段としての終了信号出力部45Bと、移動走行中に消費されたバッテリ9の電力を記憶する後述の記憶部44とが備えられている。
【0026】
(開始信号出力手段、終了信号出力手段)
具体的には、制御装置40は、PTOレバー17が停止位置にあるという情報がPTOセンサ17Aから情報管理部41に出力されている状態で、アクセルペダル14が踏み込み操作されたという情報がアクセルセンサ14Aから情報管理部41に出力されたとき、それらの情報が情報管理部41から作動制御部42に出力され、それらの情報を検知した作動制御部42が開始信号出力部45Aに開始信号の出力指令を出すように構成されている。
そして、上記のようにして開始信号の出力指令が作動制御部42から出されたときに、開始信号出力手段としての開始信号出力部45Aが開始信号を出力するようになっている。
【0027】
また、制御装置40は、開始信号が出力された後に、PTOレバー17が駆動位置にあるという情報がPTOセンサ17Aから情報管理部41に出力されたとき、その情報が情報管理部41から作動制御部42に出力され、その情報を検知した作動制御部42が終了信号出力部45Bに終了信号の出力指令を出すように構成されている。
そして、上記のようにして、終了信号の出力指令が出されたときに、終了信号出力手段としての終了信号出力部45Bが終了信号を出力するようになっている。
【0028】
つまり、作業装置(PTO軸5)が停止している状態で、アクセルペダル14が踏み込み操作され、電動トラクタ1が走行を開始したときに、開始信号が出力され、開始信号が出力された後に、作業装置(PTO軸5)が駆動されたときに、終了信号が出力される。
【0029】
(記憶手段)
図3,4に示すように、上記構成の電動トラクタ1は、消費されたバッテリ9の電力を検出し、その検出値を記憶する記憶手段が備えられている。
記憶手段は、消費されたバッテリ9の電力を検出するためにバッテリ9に備えられている消費電力センサ9Bと、消費電力センサ9Bから出力された検出値を記憶するために制御装置40に備えられている記憶部44とで構成されている。
【0030】
前記開始信号出力部45A及び前記終了信号出力部45Bから出力された開始信号及び終了信号は、消費電力センサ9Bに検知されるようになっている。
そして、消費電力センサ9Bは、開始信号を検知したときに、消費されるバッテリ9の電力の検出を開始し、終了信号を検知したときに、消費されるバッテリ9の電力の検出を終了し、記憶部44にその検出値を出力するようになっている。
即ち、記憶手段(消費電力センサ9B,記憶部44)は、開始信号から終了信号までの間で消費されたバッテリ9の電力(以下、移動消費電力と称する)を検出して記憶するようになっている。
【0031】
なお、記憶部44に記憶された移動消費電力は、終了信号が出力された移動走行の終了場所(以下、移動終了場所と称する)から開始信号が出力された移動走行の開始場所(以下、移動開始場所と称する)まで戻るために必要な電力(以下、帰路必要電力と称する)と言い換えることもできる。
【0032】
また、記憶部44に記憶されたバッテリ9の移動消費電力(帰路必要電力)は、メインスイッチ13が「切」操作され、制御装置40が停止されたときにリセットされるように構成されている。
【0033】
(残量検出手段)
図2乃至図4に示すように、上記構成の電動トラクタ1のバッテリ9には、バッテリ9の残量を検出する残量検出手段として、残量検出センサ9Aが備えられている。
残量検出センサ9Aによって検出された検出値(バッテリ9の残量)は、情報管理部41に出力され管理されるようになっている。
また、残量検出センサ9Aによるバッテリ9の残量の検出は、メインスイッチ13が「入」操作され、制御装置40が起動されたときに開始されるようになっている。
【0034】
(報知手段)
図2乃至図4に示すように、上記構成の電動トラクタ1には、残量検出センサ9Aに検出され、情報管理部41に管理されているバッテリ9の残量が、記憶部44に記憶されたバッテリ9の移動消費電力(帰路必要電力)となったとき(以下、作業終了時期と称する)、そのことを報知する報知手段が備えられている。
【0035】
(表示手段)
具体的には、報知手段は、情報管理部41から出力されるバッテリ9の残量の情報と、記憶部44から出力されるバッテリ9の移動消費電力(帰路必要電力)の情報とを検知して表示する表示手段としてのメータ19を、運転部10のステアリングホイール12の近傍に備え、使用者がバッテリ9の残量と移動消費電力(帰路必要電力)とを比較可能にすることで作業終了時期を報知するように構成されている。
【0036】
(ブザー,ランプ)
また、前記メータ19の他にも、報知手段は、情報管理部41に管理されているバッテリ9の残量が、記憶部44に記憶されたバッテリ9の移動消費電力(帰路必要電力)となったことを作動制御部42が検知したときに、作動制御部42からの制御指令に基づいて、そのことを音声を発して報知するブザー20と、そのことを光で表示して報知するランプ21とを、運転部10のメータ19の近傍に配備することで作業終了時期を報知するように構成されている。
【0037】
(報知手段によって作業終了時期が報知されるまでの流れ)
上記構成の電動トラクタ1で、移動開始場所から移動終了場所まで移動した後に、移動終了場所において作業をしている使用者に、報知手段(メータ19,ブザー20、ランプ21)が、作業終了時期を報知するまでの流れを図5に基づいて説明する。
【0038】
メインスイッチ13によって、制御装置40を起動及び停止操作する。(ステップS1)
メインスイッチ13が「入」操作されると制御装置40が起動され(ステップS1)、残量検出センサ9Aによるバッテリ9の残量の検出が開始される(ステップS2)。そして、検出されている現在のバッテリ9の残量が、情報管理部41に出力され、メータ19に表示され始める(ステップ3)。
【0039】
次に、PTO軸5が停止している状態、即ち、作業装置が停止している状態であるときに(ステップS4)、アクセルペダル14が踏み込み操作され、電動トラクタ1が走行を開始すると(ステップS5)、制御装置40の開始信号出力部45Aから消費電力センサ9Bに、移動走行の開始を示す開始信号が出力され(ステップS6)、消費電力センサ9Bによるバッテリ9の移動消費電力(帰路必要電力)の検出が開始される(ステップS7)。
なお、ステップS6にて開始信号が出力された場所が移動開始場所となる。
また、上述のように開始信号が出力された後においても、メータ19には、残量検出センサ9Aによって検出されている現在のバッテリ9の残量が表示されている。
【0040】
開始信号が出力された後、即ち、消費電力センサ9Bによるバッテリ9の移動消費電力(帰路必要電力)の検出が開始された後に、PTO軸5を駆動することで作業装置が駆動されたとき(ステップS7,S8)、制御装置40の終了信号出力部45Bから消費電力センサ9Bに移動走行の終了を示す終了信号が出力され(ステップS9)、消費電力センサ9Bによるバッテリ9の移動消費電力(帰路必要電力)の検出が終了され(ステップS10)、検出された移動消費電力が記憶部44に出力され記憶される(ステップS11)。
そして、記憶部44に記憶されたバッテリ9の移動消費電力(帰路必要電力)が、メータ19に検知され表示される(ステップS12)。
なお、ステップS9にて終了信号が出力された場所が移動終了場所となる。
【0041】
上記のようにして移動終了場所まで移動した後に、使用者が移動終了場所において作業をしているときにおいても、メータ19には、検出されている現在のバッテリ9の残量が表示されている。
そして、記憶部44に記憶され、メータ19に表示されている移動消費電力は、移動終了場所から移動開始場所まで戻るために必要な帰路必要電力でもある。
従って、使用者は、移動終了場所での作業中に、現在のバッテリ9の残量と、移動開始場所まで戻るために必要な帰路必要電力(移動消費電力)とを比較することができる(ステップS13)。
【0042】
以上のようにして、メータ19は、現在のバッテリ9の残量とバッテリ9の帰路必要電力とを表示して、使用者が両者を比較できるようにすることで、作業中の使用者にバッテリ9の残量が帰路必要電力となる作業終了時期を報知する(ステップS12,S13)。
また、ブザー20及びランプ21は、検出されている現在のバッテリ9の残量が記憶された帰路必要電力となったときに、音声及び光を発することで、作業中の使用者に作業終了時期を報知する(ステップS13、S14)。
【0043】
上記のようにして報知手段(メータ19,ブザー20、ランプ21)が作業終了時期を報知することで、使用者は、帰路必要電力を残すまでバッテリ9の電力が消費されたことを知り、その状態で作業を終了することができるので、移動開始場所まで戻る途中にバッテリ9の残量が切れ、電動トラクタ1が移動走行不能になる虞を抑制することができる。
【0044】
なお、移動終了場所から移動開始場所まで戻った電動トラクタ1は、メインスイッチ13を「切」操作して制御装置40を停止することで、記憶部44に記憶されたバッテリ9の移動消費電力(帰路必要電力)をリセットすることができる(ステップS15,S16)。
【0045】
〔別実施形態〕
〔1〕
本実施形態において、ブザー19が音声を発し、ランプ20が光を発するタイミングは、情報管理部41に管理されているバッテリ9の残量が、記憶部44に記憶された移動消費電力(帰路必要電力)となったときであるように構成されているが、前記タイミングを、情報管理部41に管理されているバッテリ9の残量が、記憶部44に記憶された移動消費電力(帰路必要電力)となるときの前後に調整可能であるように構成してもよい。
【0046】
〔2〕
本実施形態において、報知手段を構成する表示手段であるメータ19は、ステアリングホイール12の近傍に配備され、報知手段であるブザー19及びランプ20は、メータ19の近傍に配置されているが、報知手段を構成するこれらの配置箇所は、上記のように限定されるものではなく、運転部10に搭乗している使用者に報知可能な場所であればよい。
【0047】
〔3〕
本実施形態において、報知手段は、メータ19、ブザー20及びランプ21を用いて構成されているが、前記三者のうちの少なくとも一つによって報知手段が構成されていてもよい。
また、残量検出センサ9Aの検出値(バッテリ9の残量)と、記憶部44に記憶された検出値(移動消費電力=帰路必要電力)とに基づいて作業終了時期を報知する報知手段は、作業終了時期を報知可能であれば、上記メータ19、ブザー20及びランプ21に限られるものではない。
【0048】
〔4〕
情報管理部41に管理されているバッテリ9の残量が、記憶部44に記憶された移動消費電力(帰路必要電力)となったとき、本実施形態におけるメータ19には、「バッテリ9の残量が空になった」という旨を表示するように構成してもよい。
例えば、バッテリ9の残量は、メータ19に数値で表示されており、情報管理部41に管理されているバッテリ9の残量が、記憶部44に記憶された移動消費電力(帰路必要電力)となったとき、バッテリ9には帰路必要電力が残されているが、メータ19に表示されるバッテリ9の残量の数値は「0」となるように構成する。
【0049】
〔5〕
本実施形態において、消費電力センサ9Bによるバッテリ9の移動消費電力(帰路必要電力)の検出を開始させる開始信号及び終了させる終了信号は、制御装置40による開始信号出力部45A及び終了信号出力部45Bによって自動的に出力されるように構成されているが、電動トラクタ1に、開始信号出力部45Aから開始信号を出力させるスイッチや、終了信号出力部45Bから終了信号を出力させるスイッチなどを設け、手動で開始信号及び終了信号を出力するように構成してもよい。
【0050】
〔6〕
本実施形態において、記憶部44に記憶されたバッテリ9の移動消費電力(帰路必要電力)は、メインスイッチ13を「切」操作し、制御装置40を停止することでリセット可能なように構成されているが、記憶部44に記憶された移動消費電力(帰路必要電力)をリセットするリセット手段は上記構成に限定されるものではなく、メインスイッチ13以外のものによって構成してもよい。
【0051】
〔7〕
本実施形態において、PTOセンサ17Aは、PTOレバー17の操作位置を検出するように構成されているが、PTOセンサ17Aは、PTO軸5の駆動及び停止を検出するようにPTO軸5に備えられてもよい。
また、本実施形態において、電動トラクタ1の移動走行の開始は、アクセルペダル14の踏み込み操作量を検出するアクセルセンサ14Aによって検出するように構成してあるが、左右の後輪3の駆動及び停止を検出する別のセンサを左右の後輪3に備えることで、移動走行の開始を検出するように構成してもよい。
【0052】
〔8〕
本実施形態において、電動トラクタ1は、左右の後輪3を駆動輪とする二輪駆動仕様としてあるが、左右の前輪2も駆動輪とする四輪駆動仕様に構成してもよい。
【0053】
〔9〕
〔発明を実施するための形態〕、〔別実施形態〕の〔1〕乃至〔8〕においては、電動作業機が電動トラクタ1である例を示したが、上記構成は、他の電動作業機にも適用できる。
【産業上の利用可能性】
【0054】
本発明は、走行用の電動モータと、電動モータに電力を供給するバッテリとを備えた電動作業機に適用することができる。
【符号の説明】
【0055】
1 電動トラクタ
5 PTO軸
6 電動モータ(走行用モータ)
8 電動モータ(作業用モータ)
9 バッテリ
9A 残量検出手段(残量検出センサ)
9B 記憶手段(消費電力センサ)
13 メインスイッチ
14 アクセルペダル
14A 情報出力手段(アクセルセンサ)
17 PTOレバー
17A 情報出力手段(PTOセンサ)
19 表示手段,報知手段(メータ)
20 報知手段(ブザー)
21 報知手段(ランプ)
40 制御装置
44 記憶手段(記憶部)
45A 開始信号出力手段(開始信号出力部)
45B 終了信号出力手段(終了信号出力部)
【技術分野】
【0001】
本発明は、走行用の電動モータと、電動モータに電力を供給するバッテリとを備えた電動作業機に関する。
【背景技術】
【0002】
作業機において、バッテリと、バッテリの電力を受けて駆動する電動モータと、駆動輪とを備え、電動モータから出力される回転動力を駆動輪へ伝達して走行するように構成されている電動作業機がある。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2002−354611号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記構成の電動作業機で、移動開始場所(例えばバッテリの充電場所)から移動終了場所(例えば作業場所)まで移動し、移動終了場所にて作業を行ない、作業を終了した後に再び移動開始場所に戻る必要がある場合、戻るために必要な電力をバッテリに残しておかなければならない。
しかし、上記構成の電動作業機では、バッテリにどの程度の電力を残しておけば、移動開始場所までバッテリの電力を切らさずに戻れるのかがわからない。
そのため、電動作業機の使用者は、不正確な予想によって移動終了場所での作業を終了することになるため、作業をしすぎてバッテリの残量が足りなくなり、移動開始場所まで戻る途中に電動作業機がバッテリ切れで移動走行不能になる虞がある。
【0005】
本発明の目的は、移動終了場所での作業終了後に、移動終了場所から移動開始場所まで戻る必要がある場合において、戻る途中にバッテリの残量を切らさないようにすることができる電動作業機を提供することにある。
【課題を解決するための手段】
【0006】
[I]
(構成)
本発明の第1特徴は、電動作業機において次のように構成することにある。
走行用の電動モータと、前記電動モータに電力を供給するバッテリとを備え、
前記バッテリの電力の残量を検出する残量検出手段と、移動走行の開始を示す開始信号を出力する開始信号出力手段と、移動走行の終了を示す終了信号を出力する終了信号出力手段と、前記開始信号から前記終了信号までの間で消費された前記バッテリの電力を検出して記憶する記憶手段とを備え、
前記終了信号が出力されてからにおいて、前記残量検出手段の検出値と前記記憶手段に記憶された検出値とに基づいて作業終了時期を報知する報知手段を備えてある。
【0007】
(作用及び発明の効果)
請求項1に記載の、記憶手段によって記憶された検出値、即ち、前記開始信号から前記終了信号までの間で消費されたバッテリの電力(以下、移動消費電力と称する)は、移動走行の開始を示す開始信号が出力された場所(移動開始場所)から、移動走行の終了を示す終了信号が出力された場所(移動終了場所)まで移動走行するために必要な電力である。
なお、移動消費電力は、移動終了場所から移動開始場所まで戻るために必要な電力(以下、帰路必要電力と称する)でもある。
本発明の電動作業機は、残量検出手段の検出値(バッテリの残量)と、記憶手段に記憶された検出値(移動消費電力=帰路必要電力)とに基づいて作業終了時期を報知する報知手段を備えてある。
これによると、使用者は、報知手段が作業終了時期を報知することで、帰路必要電力を残すまでバッテリの電力が消費されたことを知り、その状態で作業を終了することができるので、移動開始場所まで戻る途中にバッテリの残量が切れ、電動作業機が移動走行不能になる虞を抑制することができる。
【0008】
[II]
(構成)
本発明の第2特徴は、本発明の第1特徴の電動作業機において次のように構成することにある。
前記残量検出手段の検出値を表示する表示手段を備えて、
前記記憶手段に記憶された検出値を前記表示手段に表示することにより前記作業終了時期を報知するように、前記報知手段を構成してある。
【0009】
(作用及び発明の効果)
本発明の第2特徴を備える電動作業機によると、使用者は、表示手段に表示された残量検出手段の検出値(バッテリの残量)と、記憶手段に記憶された検出値(移動消費電力=帰路必要電力)とを比較することができる。
そのため、使用者は、報知手段を構成する表示手段によって帰路必要電力をバッテリに残した状態で作業を終了することができるので、戻る途中にバッテリの残量が切れ、電動作業機が移動走行不能になる虞を抑制することができる。
【0010】
[III]
(構成)
本発明の第3特徴は、本発明の第1特徴の電動作業機において次のように構成することにある。
前記残量検出手段の検出値が前記記憶手段に記憶された検出値となったことを音声又は表示により報知することにより前記作業終了時期を報知するように、前記報知手段を構成してある。
【0011】
(作用及び発明の効果)
本発明の第3特徴を備える電動作業機によると、報知手段を構成する音声又は表示によって、残量検出手段の検出値(バッテリの残量)が記憶手段に記憶された検出値(移動消費電力=帰路必要電力)となった作業終了時期が報知される。
そのため、使用者は、音声又は表示によって作業終了時期が報知されることで、帰路必要電力を残すまでバッテリの電力が消費されたことを知り、その状態で作業を終了することができ、戻る途中にバッテリの残量が切れ、電動作業機が移動走行不能になる虞を抑制することができる。
【0012】
[IV]
(構成)
本発明の第4特徴は、本発明の第1から第3特徴の電動作業機のうちのいずれか一つにおいて次のように構成することにある。
機体に備えられた作業装置の停止状態で走行を開始したことに基づいて前記開始信号を出力するように、前記開始信号出力手段が構成され、
前記作業装置が作動状態となったことに基づいて前記終了信号を出力するように、前記終了信号出力手段が構成されている。
【0013】
(作用及び発明の効果)
本発明の第4特徴によると、使用者が移動開始場所から移動終了場所に移動して、移動終了場所にて作業を行なうとき、開始信号出力手段及び終了信号出力手段によって自動的に開始信号及び終了信号とが出力されるので、記憶手段にバッテリの移動消費電力(帰路必要電力)の検出と記憶とを行なわせる手順を簡略化することができる。
【図面の簡単な説明】
【0014】
【図1】電動トラクタの全体を示す右側面図である。
【図2】電動トラクタの制御構成を示す概略平面図である。
【図3】電動トラクタの制御構成を示す概略平面図である。
【図4】電動トラクタの制御構成を示すブロック図である。
【図5】報知手段によって作業終了時期が報知されるまでの流れを示す図である。
【発明を実施するための形態】
【0015】
(電動作業機の全体構成)
図1,2に示すように、本実施形態で例示する電動作業機は、電動トラクタ1であり、操向輪としての左右一対の前輪2と、駆動輪としての左右一対の後輪3とが備えられている。
【0016】
電動トラクタ1の後部には、耕耘ロータリーやプラウなどのような駆動型の作業装置(図示しない)を昇降揺動可能に取り付けることができる連結装置4と、作業用の動力を外部へ供給可能なPTO軸5とが備えられてあり、連結装置4に取り付けられた作業装置は、PTO軸5に連結することで駆動させることができる。
【0017】
また、電動トラクタ1の後半部には、使用者が電動トラクタ1を操作するときに搭乗する運転部10が形成されてあり、運手部10は、使用者が座る運転座席11と、運転座席11の前方に設けられ、左右の前輪2を操向操作することのできるステアリングホイール12と、踏み込み操作量を変化させることで電動トラクタ1の走行速度を調整できるアクセルペダル14と、走行する電動トラクタ1を、踏み込み操作によって制動することができる左右一対のブレーキペダル15とが備えられている。
他にも、運転部10には、連結装置4のリフトアーム4Aを昇降させることで、連結装置4に連結した作業装置を昇降揺動自在に操作できる昇降レバー16と、PTO軸5を駆動及び停止自在に切り替え操作できるPTOレバー17などの操作具と、後述の制御装置40を起動及び停止自在なキー操作式のメインスイッチ13と、後述の報知手段とが備えられている。
【0018】
(電動モータ,バッテリ)
図1乃至図4に示すように、電動トラクタ1には、左右一対の後輪3を駆動する左右一対のインホイール型の電動モータ(以下、走行用モータ6と称する)と、リフトアーム4Aを昇降させる油圧式のリフトシリンダ(図示せず)にオイルを供給する油圧ポンプ4Bを駆動するポンプ用の電動モータ(以下、ポンプ用モータ7と称する)と、PTO軸5を駆動する電動モータ(以下、作業用モータ8と称する)とが備えられている。
また、各モータ6,7,8は、交流モータであり、電動トラクタ1には、各モータ6,7,8に電力を供給するバッテリ9が備えられている。
【0019】
(制御装置)
図2乃至図4に示すように、電動トラクタ1には、マイクロコンピュータなどを搭載した複数の電子制御ユニットなどで構成した制御装置40が搭載されてあり、制御装置40は、運転部10に備えられているキー操作式の前記メインスイッチ13を、「入」操作すると通電されて起動し、「切」操作すると通電されず停止するように構成されている。
【0020】
図2乃至図4に示すように、制御装置40には、情報出力手段である各種センサからの出力情報を管理し、その情報を後述の作動制御部42に出力する情報管理部41と、情報管理部41からの情報に適した制御指令を後述の駆動制御部43などに出力する作動制御部42と、作動制御部42からの制御指令に基づいて、バッテリ9から各モータ6,7,8に供給される電力量などを制御するインバータを有する駆動制御部43とが備えられている。
【0021】
(駆動制御部)
図4に示すように、駆動制御部43は、インバータとして、ポンプ用モータ7に供給される電力量などを制御するポンプ用インバータ43Aと、作業用モータ8に供給される電力量などを制御する作業用インバータ43Bと、走行用モータ6に供給される電力量などを制御する走行用インバータ43Cとを有し、図2乃至図4に示すように、各インバータ43A,43B,43Cによって各モータ6,7,8を適正に作動させるように構成されている。
【0022】
(情報出力手段:昇降センサ)
図1乃至図2に示すように、連結装置4(リフトアーム4A)を昇降操作可能な昇降レバー16は、前後移動操作可能に構成されている。
図2乃至図4に示すように、昇降レバー16には、昇降レバー16の操作位置を検出するポテンショメータからなる昇降センサ16Aが情報出力手段として備えられてあり、昇降センサ16Aは、検出した昇降レバー16の操作位置の情報を情報管理部41に出力する。その情報は、情報管理部41から作動制御部42に出力され、その情報に適した制御指令が作動制御部42から駆動制御部43のポンプ用インバータ43Aに出力される。そして、ポンプ用インバータ43Aは、その制御指令に基づいてバッテリ9から作業用モータ8に供給される電力量を制御し、その制御に適するようにポンプ用モータ7が駆動される。
つまり、上記のようにしてポンプ用モータ7が駆動されることにより、油圧ポンプ4Bからリフトシリンダにオイルが供給され、リフトシリンダの動きに連動して連結装置4(リフトアーム4A)が昇降レバー16の操作位置に対応した位置に上下揺動するようになっている。
【0023】
(情報出力手段:PTOセンサ)
図1乃至図2に示すように、PTOレバー17は、PTO軸5を駆動状態とする駆動位置及びPTO軸5を停止状態とする停止位置に亘って前後移動操作可能に構成されている。
PTOレバー17には、PTOレバー17の操作位置を検出するポテンショメータからなるPTOセンサ17Aが情報出力手段として備えられてあり、PTOセンサ17Aは、検出したPTOレバー17の操作位置の情報を情報管理部41に出力する。その情報は、情報管理部41から作動制御部42に出力され、その情報に適した制御指令が作動制御部42から駆動制御部43の作業用インバータ43Bに出力される。そして、作業用インバータ43Bは、その制御指令に基づいてバッテリ9から作業用モータ8に供給される電力量を制御し、その制御に適するように作業用モータ8が駆動及び停止される。
つまり、PTOレバー17が駆動位置及び停止位置に移動操作されることで、作業用モータ8が駆動及び停止され、作業用モータ8に連動してPTO軸17及び作業装置も駆動及び停止されるようになっている。
【0024】
(情報出力手段:アクセルセンサ)
図1乃至図3に示すように、アクセルペダル14は、踏み込み開始位置から踏み込み限界位置まで踏み込み操作可能であり、踏み込みを解除すると、踏み込み開始位置に自動復帰するように構成されている。
アクセルペダル14には、アクセルペダル14の踏み込み操作量を検出するポテンショメータからなるアクセルセンサ14Aが情報出力手段として備えられてあり、アクセルセンサ14Aは、検出したアクセルペダル14の踏み込み操作量の情報を情報管理部41に出力する。その情報は、情報管理部41から作動制御部42に出力され、その情報に適した制御指令が作動制御部42から駆動制御部43の走行用インバータ43Cに出力される。そして、走行用インバータ43Cが、その制御指令に基づいてバッテリ9から左右の走行用モータ6に供給される電力量を制御し、その制御に適するように左右の走行用モータ6が駆動される。
つまり、アクセルペダル14を踏み込み操作することで、左右の走行用モータ6が駆動し、走行用モータ6に連動して左右の後輪3も駆動するようになっている。具体的には、アクセルペダル14の踏み込み操作量が多いほど、左右の後輪3の回転速度も速くなるように構成されている。
【0025】
(制御装置)
図3,4に示すように、制御装置40には、情報管理部41、作動制御部42及び駆動制御部43の他にも、作動制御部42から出される制御指令に基づいて、電動トラクタ1の移動走行の開始を示す開始信号を出力する開始信号出力手段としての開始信号出力部45Aと、作動制御部42から出される制御指令に基づいて、電動トラクタ1の移動走行の終了を示す終了信号を出力する終了信号出力手段としての終了信号出力部45Bと、移動走行中に消費されたバッテリ9の電力を記憶する後述の記憶部44とが備えられている。
【0026】
(開始信号出力手段、終了信号出力手段)
具体的には、制御装置40は、PTOレバー17が停止位置にあるという情報がPTOセンサ17Aから情報管理部41に出力されている状態で、アクセルペダル14が踏み込み操作されたという情報がアクセルセンサ14Aから情報管理部41に出力されたとき、それらの情報が情報管理部41から作動制御部42に出力され、それらの情報を検知した作動制御部42が開始信号出力部45Aに開始信号の出力指令を出すように構成されている。
そして、上記のようにして開始信号の出力指令が作動制御部42から出されたときに、開始信号出力手段としての開始信号出力部45Aが開始信号を出力するようになっている。
【0027】
また、制御装置40は、開始信号が出力された後に、PTOレバー17が駆動位置にあるという情報がPTOセンサ17Aから情報管理部41に出力されたとき、その情報が情報管理部41から作動制御部42に出力され、その情報を検知した作動制御部42が終了信号出力部45Bに終了信号の出力指令を出すように構成されている。
そして、上記のようにして、終了信号の出力指令が出されたときに、終了信号出力手段としての終了信号出力部45Bが終了信号を出力するようになっている。
【0028】
つまり、作業装置(PTO軸5)が停止している状態で、アクセルペダル14が踏み込み操作され、電動トラクタ1が走行を開始したときに、開始信号が出力され、開始信号が出力された後に、作業装置(PTO軸5)が駆動されたときに、終了信号が出力される。
【0029】
(記憶手段)
図3,4に示すように、上記構成の電動トラクタ1は、消費されたバッテリ9の電力を検出し、その検出値を記憶する記憶手段が備えられている。
記憶手段は、消費されたバッテリ9の電力を検出するためにバッテリ9に備えられている消費電力センサ9Bと、消費電力センサ9Bから出力された検出値を記憶するために制御装置40に備えられている記憶部44とで構成されている。
【0030】
前記開始信号出力部45A及び前記終了信号出力部45Bから出力された開始信号及び終了信号は、消費電力センサ9Bに検知されるようになっている。
そして、消費電力センサ9Bは、開始信号を検知したときに、消費されるバッテリ9の電力の検出を開始し、終了信号を検知したときに、消費されるバッテリ9の電力の検出を終了し、記憶部44にその検出値を出力するようになっている。
即ち、記憶手段(消費電力センサ9B,記憶部44)は、開始信号から終了信号までの間で消費されたバッテリ9の電力(以下、移動消費電力と称する)を検出して記憶するようになっている。
【0031】
なお、記憶部44に記憶された移動消費電力は、終了信号が出力された移動走行の終了場所(以下、移動終了場所と称する)から開始信号が出力された移動走行の開始場所(以下、移動開始場所と称する)まで戻るために必要な電力(以下、帰路必要電力と称する)と言い換えることもできる。
【0032】
また、記憶部44に記憶されたバッテリ9の移動消費電力(帰路必要電力)は、メインスイッチ13が「切」操作され、制御装置40が停止されたときにリセットされるように構成されている。
【0033】
(残量検出手段)
図2乃至図4に示すように、上記構成の電動トラクタ1のバッテリ9には、バッテリ9の残量を検出する残量検出手段として、残量検出センサ9Aが備えられている。
残量検出センサ9Aによって検出された検出値(バッテリ9の残量)は、情報管理部41に出力され管理されるようになっている。
また、残量検出センサ9Aによるバッテリ9の残量の検出は、メインスイッチ13が「入」操作され、制御装置40が起動されたときに開始されるようになっている。
【0034】
(報知手段)
図2乃至図4に示すように、上記構成の電動トラクタ1には、残量検出センサ9Aに検出され、情報管理部41に管理されているバッテリ9の残量が、記憶部44に記憶されたバッテリ9の移動消費電力(帰路必要電力)となったとき(以下、作業終了時期と称する)、そのことを報知する報知手段が備えられている。
【0035】
(表示手段)
具体的には、報知手段は、情報管理部41から出力されるバッテリ9の残量の情報と、記憶部44から出力されるバッテリ9の移動消費電力(帰路必要電力)の情報とを検知して表示する表示手段としてのメータ19を、運転部10のステアリングホイール12の近傍に備え、使用者がバッテリ9の残量と移動消費電力(帰路必要電力)とを比較可能にすることで作業終了時期を報知するように構成されている。
【0036】
(ブザー,ランプ)
また、前記メータ19の他にも、報知手段は、情報管理部41に管理されているバッテリ9の残量が、記憶部44に記憶されたバッテリ9の移動消費電力(帰路必要電力)となったことを作動制御部42が検知したときに、作動制御部42からの制御指令に基づいて、そのことを音声を発して報知するブザー20と、そのことを光で表示して報知するランプ21とを、運転部10のメータ19の近傍に配備することで作業終了時期を報知するように構成されている。
【0037】
(報知手段によって作業終了時期が報知されるまでの流れ)
上記構成の電動トラクタ1で、移動開始場所から移動終了場所まで移動した後に、移動終了場所において作業をしている使用者に、報知手段(メータ19,ブザー20、ランプ21)が、作業終了時期を報知するまでの流れを図5に基づいて説明する。
【0038】
メインスイッチ13によって、制御装置40を起動及び停止操作する。(ステップS1)
メインスイッチ13が「入」操作されると制御装置40が起動され(ステップS1)、残量検出センサ9Aによるバッテリ9の残量の検出が開始される(ステップS2)。そして、検出されている現在のバッテリ9の残量が、情報管理部41に出力され、メータ19に表示され始める(ステップ3)。
【0039】
次に、PTO軸5が停止している状態、即ち、作業装置が停止している状態であるときに(ステップS4)、アクセルペダル14が踏み込み操作され、電動トラクタ1が走行を開始すると(ステップS5)、制御装置40の開始信号出力部45Aから消費電力センサ9Bに、移動走行の開始を示す開始信号が出力され(ステップS6)、消費電力センサ9Bによるバッテリ9の移動消費電力(帰路必要電力)の検出が開始される(ステップS7)。
なお、ステップS6にて開始信号が出力された場所が移動開始場所となる。
また、上述のように開始信号が出力された後においても、メータ19には、残量検出センサ9Aによって検出されている現在のバッテリ9の残量が表示されている。
【0040】
開始信号が出力された後、即ち、消費電力センサ9Bによるバッテリ9の移動消費電力(帰路必要電力)の検出が開始された後に、PTO軸5を駆動することで作業装置が駆動されたとき(ステップS7,S8)、制御装置40の終了信号出力部45Bから消費電力センサ9Bに移動走行の終了を示す終了信号が出力され(ステップS9)、消費電力センサ9Bによるバッテリ9の移動消費電力(帰路必要電力)の検出が終了され(ステップS10)、検出された移動消費電力が記憶部44に出力され記憶される(ステップS11)。
そして、記憶部44に記憶されたバッテリ9の移動消費電力(帰路必要電力)が、メータ19に検知され表示される(ステップS12)。
なお、ステップS9にて終了信号が出力された場所が移動終了場所となる。
【0041】
上記のようにして移動終了場所まで移動した後に、使用者が移動終了場所において作業をしているときにおいても、メータ19には、検出されている現在のバッテリ9の残量が表示されている。
そして、記憶部44に記憶され、メータ19に表示されている移動消費電力は、移動終了場所から移動開始場所まで戻るために必要な帰路必要電力でもある。
従って、使用者は、移動終了場所での作業中に、現在のバッテリ9の残量と、移動開始場所まで戻るために必要な帰路必要電力(移動消費電力)とを比較することができる(ステップS13)。
【0042】
以上のようにして、メータ19は、現在のバッテリ9の残量とバッテリ9の帰路必要電力とを表示して、使用者が両者を比較できるようにすることで、作業中の使用者にバッテリ9の残量が帰路必要電力となる作業終了時期を報知する(ステップS12,S13)。
また、ブザー20及びランプ21は、検出されている現在のバッテリ9の残量が記憶された帰路必要電力となったときに、音声及び光を発することで、作業中の使用者に作業終了時期を報知する(ステップS13、S14)。
【0043】
上記のようにして報知手段(メータ19,ブザー20、ランプ21)が作業終了時期を報知することで、使用者は、帰路必要電力を残すまでバッテリ9の電力が消費されたことを知り、その状態で作業を終了することができるので、移動開始場所まで戻る途中にバッテリ9の残量が切れ、電動トラクタ1が移動走行不能になる虞を抑制することができる。
【0044】
なお、移動終了場所から移動開始場所まで戻った電動トラクタ1は、メインスイッチ13を「切」操作して制御装置40を停止することで、記憶部44に記憶されたバッテリ9の移動消費電力(帰路必要電力)をリセットすることができる(ステップS15,S16)。
【0045】
〔別実施形態〕
〔1〕
本実施形態において、ブザー19が音声を発し、ランプ20が光を発するタイミングは、情報管理部41に管理されているバッテリ9の残量が、記憶部44に記憶された移動消費電力(帰路必要電力)となったときであるように構成されているが、前記タイミングを、情報管理部41に管理されているバッテリ9の残量が、記憶部44に記憶された移動消費電力(帰路必要電力)となるときの前後に調整可能であるように構成してもよい。
【0046】
〔2〕
本実施形態において、報知手段を構成する表示手段であるメータ19は、ステアリングホイール12の近傍に配備され、報知手段であるブザー19及びランプ20は、メータ19の近傍に配置されているが、報知手段を構成するこれらの配置箇所は、上記のように限定されるものではなく、運転部10に搭乗している使用者に報知可能な場所であればよい。
【0047】
〔3〕
本実施形態において、報知手段は、メータ19、ブザー20及びランプ21を用いて構成されているが、前記三者のうちの少なくとも一つによって報知手段が構成されていてもよい。
また、残量検出センサ9Aの検出値(バッテリ9の残量)と、記憶部44に記憶された検出値(移動消費電力=帰路必要電力)とに基づいて作業終了時期を報知する報知手段は、作業終了時期を報知可能であれば、上記メータ19、ブザー20及びランプ21に限られるものではない。
【0048】
〔4〕
情報管理部41に管理されているバッテリ9の残量が、記憶部44に記憶された移動消費電力(帰路必要電力)となったとき、本実施形態におけるメータ19には、「バッテリ9の残量が空になった」という旨を表示するように構成してもよい。
例えば、バッテリ9の残量は、メータ19に数値で表示されており、情報管理部41に管理されているバッテリ9の残量が、記憶部44に記憶された移動消費電力(帰路必要電力)となったとき、バッテリ9には帰路必要電力が残されているが、メータ19に表示されるバッテリ9の残量の数値は「0」となるように構成する。
【0049】
〔5〕
本実施形態において、消費電力センサ9Bによるバッテリ9の移動消費電力(帰路必要電力)の検出を開始させる開始信号及び終了させる終了信号は、制御装置40による開始信号出力部45A及び終了信号出力部45Bによって自動的に出力されるように構成されているが、電動トラクタ1に、開始信号出力部45Aから開始信号を出力させるスイッチや、終了信号出力部45Bから終了信号を出力させるスイッチなどを設け、手動で開始信号及び終了信号を出力するように構成してもよい。
【0050】
〔6〕
本実施形態において、記憶部44に記憶されたバッテリ9の移動消費電力(帰路必要電力)は、メインスイッチ13を「切」操作し、制御装置40を停止することでリセット可能なように構成されているが、記憶部44に記憶された移動消費電力(帰路必要電力)をリセットするリセット手段は上記構成に限定されるものではなく、メインスイッチ13以外のものによって構成してもよい。
【0051】
〔7〕
本実施形態において、PTOセンサ17Aは、PTOレバー17の操作位置を検出するように構成されているが、PTOセンサ17Aは、PTO軸5の駆動及び停止を検出するようにPTO軸5に備えられてもよい。
また、本実施形態において、電動トラクタ1の移動走行の開始は、アクセルペダル14の踏み込み操作量を検出するアクセルセンサ14Aによって検出するように構成してあるが、左右の後輪3の駆動及び停止を検出する別のセンサを左右の後輪3に備えることで、移動走行の開始を検出するように構成してもよい。
【0052】
〔8〕
本実施形態において、電動トラクタ1は、左右の後輪3を駆動輪とする二輪駆動仕様としてあるが、左右の前輪2も駆動輪とする四輪駆動仕様に構成してもよい。
【0053】
〔9〕
〔発明を実施するための形態〕、〔別実施形態〕の〔1〕乃至〔8〕においては、電動作業機が電動トラクタ1である例を示したが、上記構成は、他の電動作業機にも適用できる。
【産業上の利用可能性】
【0054】
本発明は、走行用の電動モータと、電動モータに電力を供給するバッテリとを備えた電動作業機に適用することができる。
【符号の説明】
【0055】
1 電動トラクタ
5 PTO軸
6 電動モータ(走行用モータ)
8 電動モータ(作業用モータ)
9 バッテリ
9A 残量検出手段(残量検出センサ)
9B 記憶手段(消費電力センサ)
13 メインスイッチ
14 アクセルペダル
14A 情報出力手段(アクセルセンサ)
17 PTOレバー
17A 情報出力手段(PTOセンサ)
19 表示手段,報知手段(メータ)
20 報知手段(ブザー)
21 報知手段(ランプ)
40 制御装置
44 記憶手段(記憶部)
45A 開始信号出力手段(開始信号出力部)
45B 終了信号出力手段(終了信号出力部)
【特許請求の範囲】
【請求項1】
走行用の電動モータと、前記電動モータに電力を供給するバッテリとを備えた電動作業機であって、
前記バッテリの電力の残量を検出する残量検出手段と、移動走行の開始を示す開始信号を出力する開始信号出力手段と、移動走行の終了を示す終了信号を出力する終了信号出力手段と、前記開始信号から前記終了信号までの間で消費された前記バッテリの電力を検出して記憶する記憶手段とを備え、
前記終了信号が出力されてからにおいて、前記残量検出手段の検出値と前記記憶手段に記憶された検出値とに基づいて作業終了時期を報知する報知手段を備えてある電動作業機。
【請求項2】
前記残量検出手段の検出値を表示する表示手段を備えて、
前記記憶手段に記憶された検出値を前記表示手段に表示することにより前記作業終了時期を報知するように、前記報知手段を構成してある請求項1に記載の電動作業機。
【請求項3】
前記残量検出手段の検出値が前記記憶手段に記憶された検出値となったことを音声又は表示により報知することにより前記作業終了時期を報知するように、前記報知手段を構成してある請求項1に記載の電動作業機。
【請求項4】
機体に備えられた作業装置の停止状態で走行を開始したことに基づいて前記開始信号を出力するように、前記開始信号出力手段が構成され、
前記作業装置が作動状態となったことに基づいて前記終了信号を出力するように、前記終了信号出力手段が構成されている請求項1〜3のうちのいずれか一つに記載の電動作業機。
【請求項1】
走行用の電動モータと、前記電動モータに電力を供給するバッテリとを備えた電動作業機であって、
前記バッテリの電力の残量を検出する残量検出手段と、移動走行の開始を示す開始信号を出力する開始信号出力手段と、移動走行の終了を示す終了信号を出力する終了信号出力手段と、前記開始信号から前記終了信号までの間で消費された前記バッテリの電力を検出して記憶する記憶手段とを備え、
前記終了信号が出力されてからにおいて、前記残量検出手段の検出値と前記記憶手段に記憶された検出値とに基づいて作業終了時期を報知する報知手段を備えてある電動作業機。
【請求項2】
前記残量検出手段の検出値を表示する表示手段を備えて、
前記記憶手段に記憶された検出値を前記表示手段に表示することにより前記作業終了時期を報知するように、前記報知手段を構成してある請求項1に記載の電動作業機。
【請求項3】
前記残量検出手段の検出値が前記記憶手段に記憶された検出値となったことを音声又は表示により報知することにより前記作業終了時期を報知するように、前記報知手段を構成してある請求項1に記載の電動作業機。
【請求項4】
機体に備えられた作業装置の停止状態で走行を開始したことに基づいて前記開始信号を出力するように、前記開始信号出力手段が構成され、
前記作業装置が作動状態となったことに基づいて前記終了信号を出力するように、前記終了信号出力手段が構成されている請求項1〜3のうちのいずれか一つに記載の電動作業機。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−110893(P2013−110893A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2011−255337(P2011−255337)
【出願日】平成23年11月22日(2011.11.22)
【出願人】(000001052)株式会社クボタ (4,415)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成23年11月22日(2011.11.22)
【出願人】(000001052)株式会社クボタ (4,415)
【Fターム(参考)】
[ Back to top ]