
電動弁の診断装置及び診断方法
【課題】電動弁を開放することなく簡易に取付けることができ、しかも高精度で信頼性の高い診断結果を得ることができる電動弁の診断装置及び診断方法を提案する。
【解決手段】弁棒6の外部露出部位に対応するように電動弁1の外表面部分3に設けられて該外部露出部位3での計測により弁棒6の軸方向変位に関する情報を取得する弁棒移動情報取得手段X1を備え、該弁棒移動情報取得手段X1〜X7の取得情報に基づいて電動弁の機能に関する診断を行う。係る構成によれば、電動弁を開放することなく、弁棒移動情報取得手段X1を電動弁の外表面部分に設置でき、設置作業の簡易化及び迅速化が実現される。また、弁棒6の外部露出部位3において該弁棒6の軸方向変位に関する移動情報を検出することから、該移動情報を容易且つ迅速に取得できる。
【解決手段】弁棒6の外部露出部位に対応するように電動弁1の外表面部分3に設けられて該外部露出部位3での計測により弁棒6の軸方向変位に関する情報を取得する弁棒移動情報取得手段X1を備え、該弁棒移動情報取得手段X1〜X7の取得情報に基づいて電動弁の機能に関する診断を行う。係る構成によれば、電動弁を開放することなく、弁棒移動情報取得手段X1を電動弁の外表面部分に設置でき、設置作業の簡易化及び迅速化が実現される。また、弁棒6の外部露出部位3において該弁棒6の軸方向変位に関する移動情報を検出することから、該移動情報を容易且つ迅速に取得できる。
【発明の詳細な説明】
【技術分野】
【0001】
本願発明は、電動弁の弁棒の移動情報に基づいて電動弁の機能に関する診断を行う電動弁の診断装置及び診断方法に関するものである。
【背景技術】
【0002】
電動弁においては、該電動弁が保有する機能を維持し信頼性の高い作動を確保するために、定期的あるいは必要に応じて、その機能に関する診断を行うことが必要である。この電動弁の機能に関する診断項目は種々存在するが、その中でも、例えば、駆動力伝達系の磨耗状態とか、弁体の停止位置、あるいはリミットスイッチ類の作動位置等の電動弁の機能に関する事項の診断は、モータ側の回転力を弁体の開閉駆動力として伝達する弁棒の移動情報に基づいて診断することが可能である。このような電動弁の機能に関する診断を行う場合時の基礎データとしての「弁棒の移動情報」を取得するための手法として、測定棒式取得手法(特許文献1及び特許文献2参照)とかワイヤ式取得手法(特許文献3参照)が提案されている。
【0003】
測定棒式取得手法は、弁棒の頭頂部に、該弁棒の軸方向に移動可能に配置された測定棒の一端を接触させ、前記弁棒の移動情報(移動方向、移動速度、移動量等)を、該弁棒の動きに追従する前記測定棒の変位に基づいて取得する手法である。
【0004】
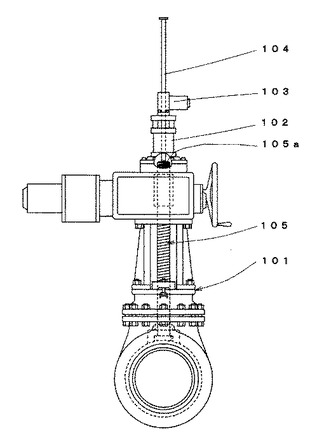
図21には、前記測定棒式の取得手法の基本的な構成を示している。この測定棒式の取得手法では、測定作業に際して、電動弁101の上端部を開放し、ここにセンサ取付台102を介してセンサ103と測定棒104を取り付けるとともに、該測定棒104の下端を弁棒105の頭頂部105に当接させ、該弁棒105の昇降動に追従してこれと一体的に前記測定棒104が昇降動するようにし、この測定棒104の動きを前記センサ103で検出し、所要の移動情報を取得するように構成している。
【0005】
ここで、特許文献1に示されるものでは、前記センサ103として摺動抵抗器を用い、弁棒105の変位に応じて測定棒104(摺動子)が動き、この抵抗変化に応じて電気信号を出力するようにしている。また、特許文献2に示されるものでは、前記測定棒104にラックを刻設し、このラックに噛合するピニオンの回転量をロータリエンコーダによって検出し、これを弁棒105の変位量に対応する信号として出力するように構成している。
【0006】
一方、特許文献3に示されるワイヤ式取得手法は、ワイヤの一端を弁棒の頭頂部に固定するとともに、他端を、弁棒カバーに取り付けたエンコーダのプーリーに連結し、弁棒の変位に追従する前記ワイヤの移動量を前記プーリーの回転量として前記エンコーダで検出し、この検出値を弁棒の変位量に対応する信号として出力するように構成している。
【0007】
【特許文献1】特開平7−4549号公報
【特許文献2】実開平6−82483号公報
【特許文献3】特開平2−307033号公報。
【発明の開示】
【発明が解決しようとする課題】
【0008】
ところが、前記測定棒式の取得手法においては、弁棒情報を取得するための測定作業に際し、電動弁101の一部を開放して前記測定棒104を設置する必要があることから、その設置作業には電動弁に関する専門技術をもった作業者を必要とし、測定棒104の設置作業そのものに制約がある。
【0009】
また、このように電動弁の一部を開放するとその開放によって電動弁の機能が停止されるため、該電動弁を備えた配管系の稼動の確保という観点から、測定作業に時期的な制約がある。
【0010】
さらに、弁棒105の頭頂部105aに測定棒104を設置した状態では、前記電動弁101の上端から上方へ前記測定棒104が大きく突出することから、該電動弁101の上方に、前記測定棒104の設置時には十分な作業スペースを、また、該測定棒104を用いた測定作業時には弁棒の動きに追従する前記測定棒104の動きを阻害しないような十分な作動スペースを、それぞれ確保することが必要であり、そのため、電動弁101の設置状況(周辺スペースとの関係等)によっては、測定棒104を用いた測定そのものが実施できないということも起こり得る。
また、前記弁棒105の周りには粘性抵抗の高いグリースが充填されているため、このグリースの粘性抵抗によって、前記弁棒105の動作時に前記測定棒104が弁棒105の頭頂部105aから浮き上がるなど、前記弁棒105に対する前記測定棒104の追従性が損なわれ、その結果、精度の良い測定が行えないこともある。
【0011】
一方、ワイヤ式の取得手法においては、前記測定棒式の取得手法の場合と同様に、電動弁の一部を開放した状態でワイヤを設置する必要があることから、その設置作業には専門技術をもった作業者を必要とするとともに、電動弁の一部を開放することで該電動弁の機能が停止されることから、ワイヤの設置作業及び該ワイヤを用いた測定作業に時期的な制約がある。
【0012】
また、ワイヤは、可撓性を有し、その軸方向への圧縮力に対しては弛みを生じ得るものであることから、特に弁棒の動きが早い電動弁の場合には、ワイヤが弁棒の動きに追従できず一時的に弛みを生じ、その結果、精度の良い測定ができないという場合もある。
【0013】
そこで、本願発明は電動弁の一部を開放することなく簡易に取付けることができ、しかも高精度で信頼性の高い診断結果を得ることができる電動弁の診断装置及び該診断装置を用いた診断方法を提案することを主たる目的としてなされたものである。
【課題を解決するための手段】
【0014】
本願発明では、前記課題を解決するために以下のような構成を採用している。
【0015】
本願の第1の発明(態様)では、弁棒に連結された弁体が開閉動可能に収納された弁体収納部と、回転駆動力が付与されたウォームの回転駆動力を利用して前記弁棒に螺合するステムナットを回転させることで前記弁棒を昇降駆動して前記弁体を開閉する弁体駆動部と、前記弁体収納部と前記弁体駆動部を連結するヨークとを備えてなる電動弁の機能に関する診断を行う診断装置において、前記弁棒の外部露出部位に対応するように電動弁の外表面部分に設けられて該外部露出部位での計測により前記弁棒の移動に関する情報を取得する弁棒移動情報取得手段と、該弁棒移動情報取得手段により取得された移動情報に基づいて前記電動弁の機能に関する診断を行う診断手段を備えたことを特徴としている。
ここで、「弁棒の移動情報」とは、弁棒の軸方向への移動に係る情報で、具体的には、弁棒の移動方向、移動量、移動速度、移動開始時点、移動停止時点、移動位置等の情報をいう。また、「電動弁の機能」とは、電動弁が本来的に備える機構上の働きとか作用であって、本願発明では、弁棒を介して弁体を駆動する駆動力伝達機能とか、弁体の開閉機能とか、弁体の作動及び停止機能等をいう。さらに、「機能に関する診断」とは、前記各機能が正常に働いているか否か、各機能が劣化しているか否か、等を診断することをいう。
【0016】
そして、本願の第1の発明は、これらの「機能に関する診断」を、弁体を駆動する弁棒の軸方向変位に係る「弁棒の移動情報」に基づいて診断するものである。
本願の第2の発明では、前記第1の発明に係る電動弁の診断装置において、前記弁棒移動情報取得手段を、前記弁棒の外部露出部位の表面に接触状態で、又は非接触状態での計測により前記弁棒の移動情報を取得する構成としたことを特徴としている。
本願の第3の発明では、前記第2の発明に係る電動弁の診断装置において、前記弁棒移動情報取得手段を、前記弁棒の外部露出部位の表面に接触して該弁棒の軸方向変位に追従して回転するローラと、該ローラの回転方向と回転量を検出する検出器を備え、該検出器により検出された回転方向と回転量に基づいて前記弁棒の移動情報を取得する構成とするとともに、前記ローラの回転半径と前記回転量に基づいて前記弁棒の移動量を算出するに際して前記ローラの回転半径を該ローラの撓み変形量に対応して補正する補正手段を備えたことを特徴としている。
【0017】
本願の第4の発明では、弁棒に連結された弁体が開閉動可能に収納された弁体収納部と、回転駆動力が付与されたウォームの回転駆動力を利用して前記弁棒に螺合するステムナットを回転させることで前記弁棒を昇降駆動して前記弁体を開閉する弁体駆動部と、前記弁体収納部と前記弁体駆動部を連結するヨークとを備えてなる電動弁の機能に関する診断方法において、前記弁棒の外部露出部位において該弁棒の移動に関する情報を取得し、取得された移動情報に基づいて電動弁の機能に関する診断を行うことを特徴としている。
【0018】
本願の第5の発明では、前記第4の発明に係る電動弁の診断方法において、前記ヨークの伸び又は縮みが復元した復元時点と、前記弁棒が実際に作動を開始する作動開始時点の少なくとも何れか一方を、前記弁棒の移動情報に基づいて取得し、前記ヨークの復元時点と前記弁棒の作動開始時点に基づいて前記弁棒のネジ部と前記ステムナットの間のクリアランスを求め、該クリアランスの大きさから前記ステムナットの磨耗状態を診断することを特徴としている。
【0019】
ここで、「ヨークの伸び又は縮みが復元した復元時点」としたのは、弁体の全閉状態からの開作動時には、ハンマブロー後にヨークの伸び復元現象が生じ、また弁体の全開状態からの閉作動時にはハンマブロー後にヨークの縮み復元現象が生じるためである。
また、「ヨークの伸び又は縮みが復元した復元時点と、前記弁棒が実際に作動を開始する作動開始時点の少なくとも何れか一方を、前記弁棒の移動情報に基づいて取得する」としたのは、これら「復元時点」と「作動開始時点」は、弁棒の移動情報に基づいて取得されるのに限らず、前記ヨークに作用する応力の変化に基づいても取得し得ることから、この第5の発明では、前記「復元時点」と「作動開始時点」の少なくとも何れか一方を弁棒の移動情報に基づいて取得することを特定したものである。
【0020】
本願の第6の発明では、前記第4の発明に係る電動弁の診断方法において、前記ヨークの伸び又は縮みの復元時点を、前記弁棒の移動情報、又は前記ヨークに発生する応力に関する情報に基づいて取得することを特徴としている。
【0021】
本願の第7の発明では、前記第4の発明に係る電動弁の診断方法において、前記弁棒の作動開始時点を、前記弁棒の移動情報、又は前記ヨークに発生する応力に関する情報に基づいて取得することを特徴としている。
【0022】
本願の第8の発明では、前記第4の発明に係る電動弁の診断方法において、前記ヨークの伸び又は縮みが復元した復元時点と、前記弁棒が実際に作動を開始する作動開始時点を、前記ヨークに発生する応力に関する情報に基づいて取得するとともに、前記弁棒の移動速度を前記弁棒の移動情報に基づいて取得し、これらの取得情報に基づいて前記弁棒のネジ部と前記ステムナットの間のクリアランスを求め、該クリアランスの大きさから前記ステムナットの磨耗状態を診断することを特徴としている。
【0023】
ここで、「弁棒の移動速度を弁棒の移動情報に基づいて取得する」としたのは、「弁棒の移動速度」は、計測によって取得される弁棒の移動時間と移動量に基づいて演算により取得される他に、例えば、電動弁の設計仕様によっても取得できるものであるところ、ここでは「弁棒の移動速度を弁棒の移動情報に基づいて取得する」ことを特定したものである。
【発明の効果】
【0024】
本願発明では次のような効果が得られる。
(a)本願の第1の発明に係る電動弁の診断装置では、前記弁棒の外部露出部位に対応するように電動弁の外表面部分に設けられて該外部露出部位での計測により前記弁棒の移動に関する情報を取得する弁棒移動情報取得手段と、該弁棒移動情報取得手段により取得された移動情報に基づいて前記電動弁の機能に関する診断を行う診断手段を備えている。
【0025】
従って、この発明の電動弁の診断装置によれば、
(a−1) 前記弁棒移動情報取得手段を前記電動弁の外表面部分に設置するものであって、その設置作業に際して電動弁の一部を開放する必要がないことから、その設置作業に電動弁に関する専門技術を必要とせず、且つ電動弁の一部の開放作業が無い分だけ設置に要する作業量も少なくなり、これらの相乗効果として、設置作業の簡易化及び迅速化が実現される、
(a−2) 電動弁の一部を開放することなく該電動弁の機能を維持したまま、弁棒の軸方向変位に関する移動情報を取得することができるので、移動情報の取得作業を、電動弁が備えられた配管系の稼動状況に左右されることなく、必要に応じて任意に行うことができ、延いては、電動弁の診断における時期的な要求に柔軟に対応できる、
(a−3) 前記弁棒の移動情報を、前記弁棒移動情報取得手段により該弁棒の外部露出部位での計測により取得するものであることから、例えば、従来の測定棒式の取得手段のように電動弁の内部に充填されたグリースの粘性抵抗によって測定精度が左右されるということがなく、精度の高い移動情報を簡易に取得することができる、
等の効果が得られる。
【0026】
(b)本願の第2の発明に係る電動弁の診断装置によれば、前記(a)に記載の効果に加えて次のような特有の効果が得られる。即ち、この発明では、前記弁棒移動情報取得検出手段を、前記弁棒の外部露出部位の表面に接触状態で、又は非接触状態での計測により前記弁棒の移動情報を取得する構成としているので、例えば、前記外部露出部位の表面に接触状態で計測する構成の場合にあっては、該弁棒の軸方向変位に追従してその移動方向と移動量が直接的に計測されることから、該弁棒の移動情報を高い精度をもって取得できる。また、前記外部露出部位の表面に非接触状態で計測する構成の場合にあっては、電動弁の運転中においても前記弁棒の作動に何等影響を与えることなくその作動状態を検出することができることから、診断作業に時期的な制約がなく、その任意性が向上する。
【0027】
(c)本願の第3の発明に係る電動弁の診断装置によれば、前記(b)に記載の効果に加えて次のような特有の効果が得られる。即ち、この発明では前記弁棒移動情報取得手段を、前記弁棒の外部露出部位の表面に接触して該弁棒の軸方向変位に追従して回転するローラと、該ローラの回転方向と回転量を検出する検出器を備え、該検出器により検出された回転方向と回転量に基づいて前記弁棒の移動情報を取得する構成とするとともに、前記ローラの回転半径と前記回転量に基づいて前記弁棒の移動量を算出するに際して前記ローラの回転半径を該ローラの撓み変形量に対応して補正する補正手段を備えているので、前記ローラの弾性変形量に影響されることなく、前記弁棒の移動量を正確に算出することができ、延いては、該弁棒の移動情報に基づく電動弁の機能に関する診断における診断精度及び診断結果の信頼性が共に向上することになる。
【0028】
(d)本願の第4の発明に係る電動弁の診断方法では、弁棒に連結された弁体が開閉動可能に収納された弁体収納部と、回転駆動力が付与されたウォームの回転駆動力を利用して前記弁棒に螺合するステムナットを回転させることで前記弁棒を昇降駆動して前記弁体を開閉する弁体駆動部と、前記弁体収納部と前記弁体駆動部を連結するヨークとを備えてなる電動弁の機能に関する診断方法において、前記弁棒の外部露出部位において該弁棒の移動に関する情報を取得し、取得された移動情報に基づいて電動弁の機能に関する診断を行ように構成したことを特徴としている。
【0029】
従って、この第4の発明に係る電動弁の診断方法によれば、前記弁棒の外部露出部位において該弁棒の軸方向変位に関する移動情報を検出するものであることから、例えば、電動弁の一部を開放して弁棒を露出させ、その軸方向変位に関する情報を取得する場合に比して、該情報を容易且つ迅速に取得でき、延いては該取得情報に基づく電動弁の機能に関する診断の作業性の向上及び診断コストの低減が可能となる。
【0030】
また、前記弁棒の移動情報を、該弁棒の外部露出部位での計測により取得するものであることから、例えば、従来の測定棒式の取得手段によって測定する場合のように電動弁の内部に充填されたグリースの粘性抵抗によってその測定精度が左右されるということがなく、精度の高い移動情報を簡易に取得することができる、
等の効果が得られる。
【0031】
(e)本願の第5の発明に係る電動弁の診断方法によれば、前記(d)に記載の効果に加えて次のような特有の効果が得られる。即ち、この発明では、前記ヨークの伸び又は縮みが復元した復元時点と、前記弁棒が実際に作動を開始する作動開始時点の少なくとも何れか一方を、前記弁棒の移動情報に基づいて取得し、前記ヨークの復元時点と前記弁棒の作動開始時点に基づいて前記弁棒のネジ部と前記ステムナットの間のクリアランスを求め、該クリアランスの大きさから前記ステムナットの磨耗状態を診断するもの、即ち、前記ステムナットの磨耗が直接的に反映される前記弁棒のネジ部と前記ステムナットの間のクリアランスに基づいて該ステムナットの磨耗状態を診断するものであることから、その診断が極めて精度良く行われ、信頼性の高い診断が実現される。
【0032】
また、前記ヨークの伸び又は縮みが復元した復元時点も、前記弁棒が実際に作動を開始する作動開始時点も、共に、弁棒の挙動の変化としてデータ上において如実に表れ且つその判断が容易であることから、これら復元時点と作動開始時点の少なくとも何れか一方を前記弁棒の移動情報に基づいて取得することで、これらの取得情報は信頼性の高い高精度のものとなり、延いては、これらの取得情報に基づいて行われる前記ステムナットの磨耗状態の診断の信頼性が担保される。
【0033】
さらに、この発明では、前記復元時点と作動開始時点の双方を前記弁棒の移動情報に基づいて取得することも含まれるが、係る構成とした場合には、前記効果がより一層顕著となるものである。
【0034】
(f)本願の第6の発明に係る電動弁の診断方法によれば、前記(d)に記載の効果に加えて次のような特有の効果が得られる。即ち、この発明では、前記ヨークの伸び又は縮みの復元時点を、前記弁棒の移動情報、又は前記ヨークに発生する応力に関する情報に基づいて取得するようにしている。この場合、前記復元時点は、前記弁棒の挙動の変化としても、また前記ヨークに発生する応力の変化としても、共に、データ上において如実に表れ且つその判断が容易であることから、前記復元時点を前記弁棒の移動情報に基づいて、又は前記ヨークに発生する応力に関する情報に基づいて取得することで、取得される前記復元時点に関する情報は信頼性の高い高精度のものとなり、延いては、この取得情報に基づいて行われる前記ステムナットの磨耗状態の診断の信頼性が担保される。
【0035】
(g)本願の第7の発明に係る電動弁の診断方法によれば、前記(d)に記載の効果に加えて次のような特有の効果が得られる。即ち、この発明では、前記弁棒の作動開始時点を、前記弁棒の移動情報、又は前記ヨークに発生する応力に関する情報に基づいて取得するようにしている。この場合、前記弁棒の作動開始時点は、前記弁棒の挙動の変化としても、また前記ヨークに発生する応力の変化としても、共に、データ上において如実に表れ且つその判断が容易であることから、前記作動開始時点を前記弁棒の移動情報に基づいて、又は前記ヨークに発生する応力に関する情報に基づいて取得することで、取得される前記作動開始時点に関する情報は信頼性の高い高精度のものとなり、延いては、この取得情報に基づいて行われる前記ステムナットの磨耗状態の診断の信頼性が担保される。
【0036】
(h)本願の第8の発明に係る電動弁の診断方法によれば、前記(d)に記載の効果に加えて次のような特有の効果が得られる。即ち、この発明では、前記ヨークの伸び又は縮みが復元した復元時点と、前記弁棒が実際に作動を開始する作動開始時点を、前記ヨークに発生する応力に関する情報に基づいて取得するとともに、前記弁棒の移動速度を前記弁棒の移動情報に基づいて取得し、これらの取得情報に基づいて前記弁棒のネジ部と前記ステムナットの間のクリアランスを求め、該クリアランスの大きさから前記ステムナットの磨耗状態を診断するようにしているので、前記弁棒の移動速度は、前記弁棒移動情報取得手段により取得される現在の弁棒の移動情報、即ち、実測データに基づいて取得されることとなり、例えば、弁棒の移動速度を電動弁の設計仕様に基づいて取得するような場合に比して、より実際的な診断が実現され、信頼性の高い診断結果が得られる。
【発明を実施するための最良の形態】
【0037】
以下、本願発明に係る電動弁の診断装置及びその診断方法を、幾つかの好適な実施形態(実施の形態)に基づいて具体的に説明する。
【0038】
「第1の実施形態」
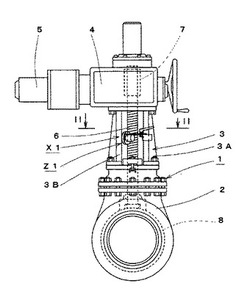
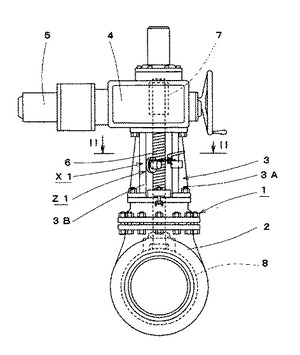
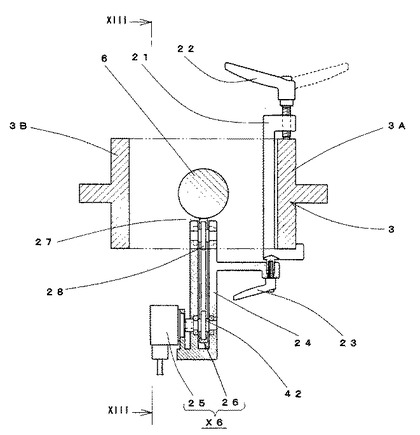
図1には、本願発明の第1の実施形態に係る診断装置Z1を備えた電動弁1を示しており、同図において符号2は弁体収納部、4は弁体駆動部であって、該弁体収納部2と弁体駆動部4はヨーク3を介して一体的に連結されている。前記弁体収納部2と弁体駆動部4の間には、弁棒6が配置されており、該弁棒6は、その下端に前記弁体8が連結されるとともに、その上端側には前記弁体駆動部4に設けたステムナット7が噛合されている。また、前記弁棒6は、前記ヨーク3部分においては、その左右一対の支柱部3A,3B間に露出状態で配設されている。
【0039】
そして、前記弁棒6は、前記弁体駆動部4に付設されたモータ5によって、図示しないウォーム及びウォームホイールを介して、前記ステムナット7を回転駆動させることで、その軸方向に昇降動して前記弁体8を開弁又は閉弁させる。
【0040】
ところで、電動弁1においては、その機能を維持し信頼性の高い作動を確保するために、定期的あるいは必要に応じて、その機能に関する診断を行うことが必要であること、及び、この電動弁1の機能に関する診断においては、例えば、駆動力伝達系の磨耗状態とか、弁体の停止位置、あるいはリミットスイッチ類の作動位置等の診断が行われるが、これらの診断項目については、前記弁棒6の軸方向の変位に関わる移動情報に基づいて診断することが可能であることは、既述の通りである。
【0041】
係る観点から、この実施形態においては、次述のように、前記弁棒6の軸方向変位に関する移動情報を取得する弁棒移動情報取得手段X1を主体とする診断装置Z1を前記電動弁1に取り付けて、該弁棒移動情報取得手段X1により取得される前記弁棒6の移動情報に基づいて電動弁1の診断を行うようにしている。
【0042】
そして、この場合、前記電動弁1への前記診断装置Z1の設置を、従来のように電動弁1の一部を開放することなく外部から容易に設置することができ、且つ前記電動弁1の設置状況下におけるスペース的な制約を受けないように、前記診断装置Z1の設置作業時及び設置後の診断時における所要スペースを狭小化すること等を考慮して、前記診断装置Z1を構成している。
以下、この実施形態に係る診断装置Z1を、図2〜図5を参照して、具体的に説明する。
【0043】
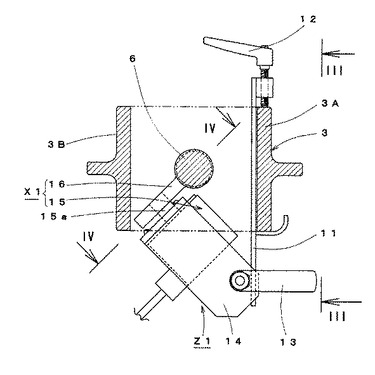
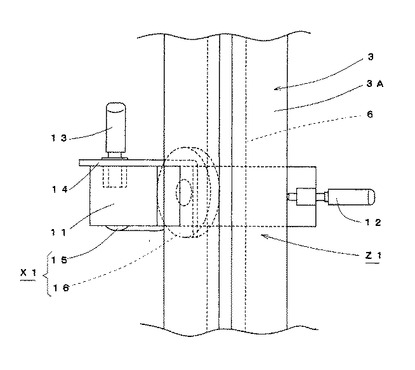
図2及び図3には、前記診断装置Z1の主体を成す弁棒移動情報取得手段X1を示している。尚、前記診断装置Z1は、前記弁棒移動情報取得手段X1の他に、該弁棒移動情報取得手段X1からの情報を受けて演算等によって各種の診断項目の診断を行う診断手段としての処理ユニットを備えて構成されるが、ここでは前記処理ユニットの図示を省略し、前記弁棒移動情報取得手段X1のみ図示している。
【0044】
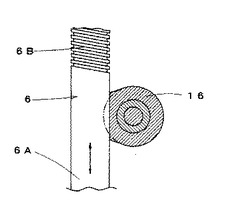
前記弁棒移動情報取得手段X1は、前記ヨーク3に取付けられて、電動弁診断の基礎情報となる前記弁棒6の移動情報、即ち、開弁側又は閉弁側への移動方向と移動量を取得するもので、次述のローラ16と検出器としてのロータリエンコーダ15を備えて構成される。
前記ローラ16は、前記弁棒6の外表面に接触し、該弁棒6の軸方向変位に追従して回転するものであって、ゴム素材に砥粒等の粒状物を混入させた混合材を用いて所定径のローラ状に成形され、適度の弾性変形性と耐磨耗性及び摩擦係数をもち、ロータリエンコーダ15の入力軸15aに取付けられている。
【0045】
また、前記ロータリエンコーダ15は、前記ローラ16と一体に回転する前記入力軸15aの回転に基づいて、その回転方向と回転量(回転角)を取得し、これら取得情報に対応する信号を処理ユニットに出力するもので、支持ブラケット14に取付けられている。また、この支持ブラケット14は、クランプ12によって前記ヨーク3の一方の支柱部3Aに固定された固定ブラッケット11に対して、クランプ13により回動位置調整可能に連結されており、該支持ブラケット14の回動位置の調整によって、前記ローラ16は前記ヨーク3の左右一対の支柱部3A,3B間に露出している前記弁棒6の外周面に所定の押圧力で当接される。
【0046】
この状態で、前記弁棒6が上昇(開弁作動方向)または降下(閉弁作動方向)すると、該弁棒6の外表面に当接した前記ローラ16が該外表面との間に作用する摩擦力によって回転し、このローラ16の回転が前記入力軸15aの回転として前記ロータリエンコーダ15に入力される。そして、前記ローラ16の回転方向から前記弁棒6の移動方向が直接的に取得される一方、前記ローラ16の回転角と前記ローラ16の径寸法から前記弁棒6の移動量が、さらに前記ローラ16の回転角と回転時間から前記弁棒6の移動速度が、それぞれ演算にて取得される。これら各取得情報が前記処理ユニットに入力され、これに基づいて電動弁1の各種の診断が行われる。尚、この処理ユニットにおける電動弁1の診断手法等については、後に纏めて説明する。
【0047】
ところで、この実施形態の診断装置Z1による診断の精度は、該診断装置Z1を構成する前記弁棒移動情報取得手段X1の情報取得精度に依存するところが大きく、さらにこの弁棒移動情報取得手段X1の情報取得精度は前記弁棒6の動きに対する前記ローラ16の追従性に依存するところが大きい。このため、この実施形態の弁棒移動情報取得手段X1では、上述のように、前記ローラ16を適度の弾性変形性と耐磨耗性及び摩擦係数を具備するものとするとともに、該ローラ16の前記弁棒6に対する押圧力を調整可能としたものである。
【0048】
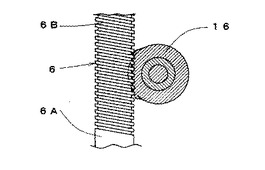
即ち、図4及び図5に示すように、前記ローラ16は、前記弁棒6の軸方向変位に伴って、該弁棒6の平滑面で構成される軸部6Aと凹凸面で構成されるネジ部6Bの双方に接触することになる。この場合、前記ローラ16を上述のように構成することで、該ローラ16が弁棒6の軸部6Aに接触するときは、図4に示すように、該ローラ16が弾性的な潰れ変形を生じ比較的大きな接触面積と面圧をもつことで、該ローラ16は前記弁棒6との間にスリップを生じることなく該弁棒6の動きに追従して回転することになる。また、前記ローラ16が弁棒6のネジ部6Bに接触するときは、図5に示すように、該ローラ16が弾性的な潰れ変形を生じねじ山間に進入して係止作用をもつことで、該ローラ16は前記弁棒6との間にスリップを生じることなく該弁棒6の動きに追従して回転することになる。
【0049】
このように、前記弁棒移動情報取得手段X1として前記ローラ16を用いることで、前記ローラ16が前記弁棒6の軸部6Aとネジ部6Bの何れに接触する場合においても、これら両者の表面状態の相違に拘わらず、前記ローラ16は常に弁棒6の動きに追従して回転することになる。この結果、前記弁棒移動情報取得手段X1の情報取得精度が高水準に維持され、延いては前記診断装置Z1の診断精度が向上するものである。
【0050】
ここで、万一の事態として、前記ローラ16が前記弁棒6の軸部6Aに接触している間においてスリップが生じた場合を想定し、その場合における補正手法を、図20を参照して説明する。
【0051】
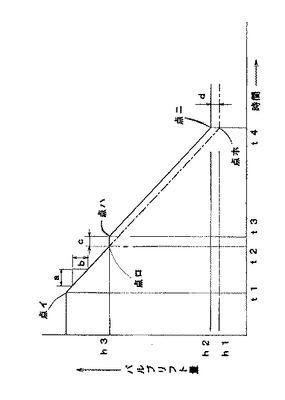
図20において、実線は、電動弁の閉作動の開始(点イ 時間t1)後、その作動途中において前記ローラ16にスリップが発生(点ロ 時間t2)し、時間の経過に拘わらずバルブリフトが変化しない領域(点ロ〜点ハ 時間c)が生じた後、スリップの収束によって再び閉作動を開始(点ハ 時間t3)し、最終的に、シートタッチによりバルブリフトの変化が停止(点ニ 時間t4)したときのバルブリフト線図を示している。
【0052】
この場合、バルブリフトの変化率「b/a」はその作動の全域を通して一定と見做すことができる。また、シートタッチ時点における実際のバルブリフト「h1」と計測上のバルブリフト「h2」の間には差分「d」が存在する。
【0053】
そこで、スリップ発生前におけるバルブリフト線図(点イ〜点ロの線分)をそのまま延長するとともに、差分「d」を「d=c×(b/a)」から演算により求め、前記延長線と前記バルブリフト「h1」の線分との交点を「点ホ」とし、「点ロ〜点ホ」の線分を補正後のバルブリフト線図とするものである。
【0054】
係る補正によって、例え前記ローラ16にスリップが生じたとしても、前記弁棒移動情報取得手段X1により取得される弁棒6の移動情報はスリップの影響が排除された信頼性の高い情報とされる。
【0055】
「第2の実施形態」
図6及び図7には、本願発明の第2の実施の形態に係る診断装置Z2を構成する弁棒移動情報取得手段X2を電動弁1のヨーク3部分に設置した状態を示している。
【0056】
この弁棒移動情報取得手段X2は、前記第1の実施形態に係る診断装置Z1の弁棒移動情報取得手段X1と同様に、弁棒6の外部露出部分の外表面に接触して該弁棒の移動に追従して回転するローラ16と、該ローラ16の回転に伴う情報を検出する検出器としてのロータリエンコーダ15を備えて構成される。しかし、前記第1の実施形態の弁棒移動情報取得手段X1においては、前記ローラ16が前記弁棒6の外表面に押し付けられることによる弾性変形量を前記ロータリエンコーダ15の検出値に反映させていなかったが、次述のように、この実施形態の弁棒移動情報取得手段X2では、前記ローラ16の弾性変形量を前記ロータリエンコーダ15の検出値に反映させることで、より一層精度の高い弁棒6の移動情報を取得するようにしている。
【0057】
即ち、前記ローラ16は、押圧力がかかっていない自然状態で半径「r0」であっても、これが前記弁棒6の外表面に押圧されると弾性変形して実質的な半径は弾性変形量だけ減少して半径「r」となる。一方、弁棒の移動量は、前記ロータリエンコーダ15の検出値(回転量)と前記ローラ16の回転半径との積として求められる。従って、このローラ16の回転半径を、自然状態での前記半径「r0」として計算したときと、弾性変形した後の前記半径「r」として計算したときでは、当然に異なった数値となる。この場合、前記半径「r0」と前記半径「r」の差分が小さく電動弁の診断上においてこれを無視できる場合(それほど厳密な診断でない場合)には問題ないが、この差分が電動弁の診断上において看過できないほどの影響があるような診断である場合には、これらの半径「r0」と半径「r」の差分の影響を前記ロータリエンコーダ15の検出値に反映させることが必要となる。これを実現するのがこの実施形態の弁棒移動情報取得手段X2であって、その具体的な構成は以下の通りである。
【0058】
この実施形態の弁棒移動情報取得手段X2では、前記ヨーク3に取付けられる固定ブラケット30の固定部30aにアーム部30bを一体的に延設し、このアーム部30bにリニアガイド35を介して可動ブラケット32を取付けている。そして、この可動ブラケット32の基部32aに前記ロータリエンコーダ15を取付けるとともに、該ロータリエンコーダ15の入力軸15aに取付けられた前記ローラ16を前記弁棒6の外表面に押圧接触させるようにしている。さらに、前記可動ブラケット32の延設部32bには、レーザセンサ31を取付けるとともに、該レーザセンサ31のレーザ照射部31aを前記アーム部30bの端部に設定した測定点36に対向させている。
【0059】
また、前記可動ブラケット32は、前記固定部30aのアーム部30bとの間に縮装したスプリング33のバネ力によって、常時前記ローラ16を前記弁棒6の外表面に押圧する方向に付勢されている。このスプリング33の付勢力は調整ネジ34によって増減調整ができるようになっている。
【0060】
ここで、前記ローラ16の厚さ方向中心と前記レーザセンサ31のレーザ照射部31aと前記測定点36の中心は、一直線上に位置している。そして、前記ローラ16の軸芯位置と前記レーザセンサ31のレーザ照射部31aの前記直線上の間隔「L」は一定に固定されているが、前記ローラ16の軸芯と前記弁棒6の外表面上の前記ローラ16の接触点との間隔「r」(即ち、前記ローラ16の弾性変形後における実質的な回転半径)と、前記レーザセンサ31のレーザ照射部31aと前記測定点36との間隔「s」は、前記ローラ16の弾性変形に対応して増減変化する。そして、この間隔「r」と間隔「s」の間には、「r+s=一定」という関係が成立し、前記ローラ16の弾性変形量が大きくなれば間隔「r」が減少すると同時に、間隔「s」は間隔「r」の減少分だけ増加することになる。
【0061】
従って、例えば、初期設定として、前記ローラ16を前記弁棒6の外表面に、弾性変形が生じない範囲で接触させたとき(即ち、前記ローラ16が半径「r0」で接触しているとき)、前記レーザセンサ31のレーザ照射部31aと前記測定点36との間隔「s0」を計測し、これら「r0」と「s0」をそれぞれ初期値として保有する。すると、これら二つの初期値「r0」、「s0」と、前記間隔「r」及び間隔「s」の間には、
「s+r=r0+s0」
「r=(s×s0)/r0=s×(s0/r0)」、
という関係が成立する。ここで、(s0/r0)は定数と考えることができるので、前記間隔「r」は、前記レーザセンサ31によって取得される前記間隔「s」から得ることができる。
【0062】
この結果、前記ロータリエンコーダ15の検出値に基づいて前記弁棒6の移動量を算出する際に、前記ローラ16の回転半径を前記初期値「r0」ではなく、前記間隔「s」を考慮して得られる前記間隔「r」として算出する(即ち、前記ローラ16の回転半径を前記初期値「r0」から前記間隔「r」に補正する)ことで、前記ローラ16の弾性変形量に影響されることなく、前記弁棒6の移動量を正確に算出することができることになり、延いては、これらの弁棒6の移動情報に基づく電動弁1の機能に関する診断の信頼性が確保されることになる。
【0063】
尚、この実施形態では、前記固定ブラケット30に対して前記リニアガイド35により移動可能に支持された前記可動ブラケット32と、該可動ブラケット32に取付けられた前記レーザセンサ31で特許請求の範囲中の補正手段が構成される。
【0064】
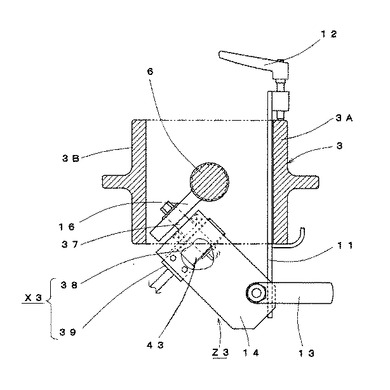
「第3の実施形態」
図8には、本願発明の第3の実施形態に係る診断装置Z3を構成する弁棒移動情報取得手段X3を、電動弁1のヨーク3部分に固定された固定ブラケット11と該固定ブラケット11に位置調整可能に連結された支持ブラケット14を介して、前記ヨーク3部分に設置した状態を示しており、同図において符号12及び13は、前記固定ブラケット11と前記支持ブラケット14にそれぞれ設けられたクランプである。
【0065】
前記弁棒移動情報取得手段X3は、電動弁診断の基礎情報となる前記弁棒6の移動情報を取得するもので、次述のローラ16と、検出器としての測定用ローラ38と磁気ヘッド39を備えて構成される。
【0066】
前記ローラ16は、前記弁棒6の外表面に接触し、該弁棒6の軸方向変位に追従して回転するものであって、ゴム素材に砥粒等の粒状物を混入させた混合材を用いて所定径のローラ状に成形され、適度の弾性変形性と耐磨耗性及び摩擦係数を兼備している。そして、このローラ16は、前記支持ブラケット14に回転自在に支承された回転軸37の一端側に固定されている。また、前記ローラ16は、前記支持ブラケット14の位置調整によって前記弁棒6の外表面に対して所定の押圧力で押圧接触され、該弁棒6の軸方向への移動に追従して回転される。
【0067】
前記測定用ローラ38は、所定径を有し、前記回転軸37の他端側に固定され、該回転軸37を介して前記ローラ16と一体的に回転される。この測定用ローラ38は、その外周面に所定の情報が磁気信号として記録された磁気テープ43が、その全周に亘って巻回され且つ固定されている。そして、この磁気テープ43に記録された情報は、前記磁気ヘッド39によって読み取られる。尚、この磁気ヘッド39は、前記測定用ローラ38の外周面に対してその径方向外方からこれに近接するように前記支持ブラケット14に取り付けられている。
【0068】
そして、この弁棒移動情報取得手段X3では、前記弁棒6が軸方向へ移動するとき、これに追従して前記ローラ16が回転し、このローラ16の回転が前記回転軸37を介して前記測定用ローラ38に伝達される。この測定用ローラ38が回転すると、これに設けられた前記磁気テープ43の情報が前記磁気ヘッド39によって読み取られ、該磁気ヘッド39から前記弁棒6の移動に関する情報が処理ユニット側へ出力される。
【0069】
このように、この弁棒移動情報取得手段X3では、前記弁棒6の移動に関する情報を前記磁気ヘッド39によって直接的に取得すものであり、且つ前記磁気ヘッド39がコンパクトであることから、該弁棒移動情報取得手段X3そのものの小型化が促進され、延いては該弁棒移動情報取得手段X3を備えて構成される前記診断装置Z3の小型化及び取扱性が向上することになる。
【0070】
尚、この実施形態の弁棒移動情報取得手段X3においても、前記第2の実施形態の弁棒移動情報取得手段X2と同様に、前記ローラ16の弾性変形量を前記磁気ヘッド39の検出値に反映させることで、より一層精度の高い弁棒6の移動情報を取得できることは勿論である。
【0071】
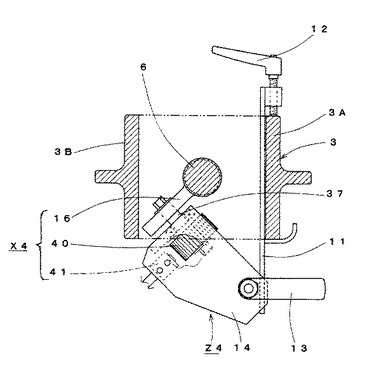
「第4の実施形態」
図9には、本願発明の第4の実施形態に係る診断装置Z4を構成する弁棒移動情報取得手段X4を、電動弁1のヨーク3部分に固定された固定ブラケット11と該固定ブラケット11に位置調整可能に連結された支持ブラケット14を介して、前記ヨーク3部分に設置した状態を示しており、同図において符号12及び13は、前記固定ブラケット11と前記支持ブラケット14にそれぞれ設けられたクランプである。
【0072】
前記弁棒移動情報取得手段X4は、電動弁診断の基礎情報となる前記弁棒6の移動情報を取得するもので、次述のローラ16と、検出器としての測定用ローラ40と光学式センサ41を備えて構成される。
【0073】
前記ローラ16は、前記弁棒6の外表面に接触し、該弁棒6の軸方向変位に追従して回転するものであって、ゴム素材に砥粒等の粒状物を混入させた混合材を用いて所定径のローラ状に成形され、適度の弾性変形性と耐磨耗性及び摩擦係数をもち、前記支持ブラケット14に回転自在に支承された回転軸37の一端側に固定されている。このローラ16は、前記支持ブラケット14の位置調整によって前記弁棒6の外表面に対して所定の押圧力で押圧接触され、該弁棒6の軸方向への移動に伴って回転される。
【0074】
前記測定用ローラ40は、所定径を有し、前記回転軸37の他端側に固定され、該回転軸37を介して前記ローラ16と一体的に回転される。この測定用ローラ40は、その外周面にその軸方向へ延びる多数の溝を周方向に所定間隔で形成している。尚、この溝は、次述する光学式センサ41による検出を容易とするためのものであり、従って、他の実施形態においては前記溝の形成に代えて、例えば、所定間隔で多数の直線を印刷等したテープを前記測定用ローラ40の外周面に貼設するようにしても良い。
【0075】
前記光学式センサ41は、例えば、画像処理用のCCDカメラで構成され、前記測定用ローラ40の外周面にその径方向外方から所定間隔をもって対向するようにして、前記支持ブラケット14に取付けられている。そして、この光学式センサ41は、前記測定用ローラ40の回転に伴うその外周面の模様の変化を撮像して画像データとして取り込み、これを処理ユニットに出力する。処理ユニットでは、光学式センサ41から入力された画像データを画像処理してその位置を特定して認識し、その特定位置がどの方向へ、どれぐらい移動したか(即ち、弁棒6の移動方向及び移動量)、等の情報を取得する。
【0076】
この場合、撮像の画像処理という手法を用いることから、撮像の変化が明確に判別できる場合、例えば、弁棒の停止状態からの移動開始時点とか、逆に、弁棒の移動状態からの停止時点の検出を高精度に行えるので、弁棒の移動距離、即ち、バルブストロークに関する情報の取得には特に有利である。
【0077】
また、このような画像処理方式のセンサ以外の光学式センサ41としては、例えば、光源から前記弁棒6の表面に光を照射し、該表面で反射した反射光を受けてこれを光電変換して位置信号として出力するとともに、この出力値に基づいてその座標上の位置を特定して認識し、該認識位置の変化から、前記弁棒6がどの方向へ、どれぐらい移動したか、を検出するもの等、種々のものが採用できる。
【0078】
この光学式センサ41を用いた弁棒移動情報取得手段X4は、該光学式センサ41が直接弁棒6に接触しない非接触形であることから、電動弁1の運転中でもその作動に何等の支障を及ぼすことなく計測でき、そのためる、診断時期が制約されないという、特有の利点がある。
【0079】
尚、この実施形態の弁棒移動情報取得手段X3においても、前記第2の実施形態の弁棒移動情報取得手段X2と同様に、前記ローラ16の弾性変形量を前記磁気ヘッド39の検出値に反映させることで、より一層精度の高い弁棒6の移動情報を取得できることは勿論である。
【0080】
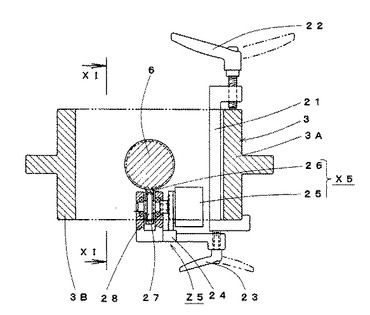
「第5の実施形態」
図10及び図11には、本願発明の第5の実施形態に係る診断装置Z5を前記電動弁1のヨーク3部分に取付けた状態を示している。この診断装置Z5は、弁棒移動情報取得手段X5を主体とするものであって、該弁棒移動情報取得手段X5によって、前記弁棒6のうち、前記ヨーク3の左右一対の支柱部3A,3B間に露出している部分においてその動きを計測し、電動弁診断の基礎情報となる前記弁棒6の開弁側又は閉弁側への移動方向と移動量を取得する。
【0081】
前記弁棒移動情報取得手段X5は、次述するクローラ26と検出器としてのロータリエンコーダ25を備えて構成される。前記クローラ26は、所定間隔をもって一列に配置された3個の走行ローラ28と該各走行ローラ28間にそれぞれ前後して2個ずつ配置された小径の押圧ローラ29を備えるとともに、これら各走行ローラ28及び押圧ローラ29を取り囲むようにして環状のベルト27を掛け回して構成される。
【0082】
尚、前記ベルト27の内周面にはその走行方向に所定間隔で突条(図示省略)が形成される一方、前記走行ローラ28の外周面には、前記ベルト27の突条に噛合する噛合歯が周方向に所定間隔で形成されており、これら突条と噛合歯を噛合させることで、前記ベルト27の走行に追従して前記走行ローラ28が回転される。前記押圧ローラ29は、前記ベルト27をバックアップしてその弛みを防止するものであって、該ベルト27との一体性は要求されないため、噛合歯は設けられていない。
【0083】
前記クローラ26の前記各走行ローラ28のうち、一端側に位置する走行ローラ28には、ロータリエンコーダ25が連結されている。また、このクローラ26と前記ロータリエンコーダ25は、一体的に支持ブラッケット24に支持されており、該走行ローラ28の回転が前記ロータリエンコーダ25に入力されるようになっている。
【0084】
また、前記ヨーク3の支柱部3Aには、クランプ22によって固定ブラッケット21が取付けられており、さらに、この固定ブラッケット21にはクランプ23によって前記支持ブラッケット24が連結されている。
【0085】
そして、前記クローラ26は、前記ベルト27の一側を前記弁棒6の表面に押し当てた状態で前記ヨーク3側に取付けられるが、その場合、前記クランプ23の締め込み量の調節によって、前記クローラ26の前記弁棒6に対する押圧力が調整されるようになっている。
【0086】
前記弁棒移動情報取得手段X5を前記ヨーク3側に取付けた状態において、前記弁棒6が上昇(開弁作動方向)または降下(閉弁作動方向)すると、該弁棒6の外表面に当接した前記クローラ26のベルト27が前記各走行ローラ28間で走行し、このベルト27の走行に追従して該各走行ローラ28が回転される。この走行ローラ28の回転が前記ロータリエンコーダ25に入力されることで、前記弁棒6の移動方向が直接的に取得される一方、前記走行ローラ28の回転角と径寸法から前記弁棒6の移動量が、前記走行ローラ28の回転角と回転時間から前記弁棒6の移動速度が、それぞれ演算にて取得される。そして、これら取得情報が前記処理ユニットに入力され、これに基づいて電動弁1の各種の診断が行われる。
【0087】
ところで、この実施形態の診断装置Z5においても、前記第1の状態の診断装置Z1の場合と同様に、該診断装置Z5による診断の精度は、これを構成する前記弁棒移動情報取得手段X2の情報取得精度に依存するところが大きく、さらにこの弁棒移動情報取得手段X2の情報取得精度は前記弁棒6の動きに対する前記クローラ26の追従性に依存するところが大きい。
【0088】
この場合、この実施形態の弁棒移動情報取得手段X5では、前記クローラ26の構造的な理由から、前記ベルト27の厚さ方向における弾性変形性が低く、例えば、該ベルト27が前記弁棒6のネジ部6Bに接したときでも、該ネジ部6Bのネジ山間には殆ど進入せず該ネジ部6Bとの間の係止作用は殆ど望めない。このため、この実施形態の弁棒移動情報取得手段X5では、前記クローラ26の長さ、即ち、前記ベルト27が前記弁棒6の表面に接する長さを比較的長くして前記弁棒6側との接触面積の拡大を図るとともに、該弁棒6側への押圧力を大きくすることで、前記弁棒6の表面との間に作用する摩擦力を高め、これによって前記弁棒6の移動に対する前記ベルト27の走行追従性を確保するようにしている。この結果、前記弁棒移動情報取得手段X5の前記弁棒6からの情報取得精度が良好に維持され、延いては前記診断装置Z2の診断精度が良好に維持される。
【0089】
そして、この実施形態のように前記クローラ26によって前記弁棒移動情報取得手段X5を構成した場合の最大の利点は、前記弁棒6の表面が前記ネジ部6のような凹凸面であっても、なんら支障なく、前記軸部6Aのような平滑面である場合と同様に、精度の高い情報取得が可能な点である。
【0090】
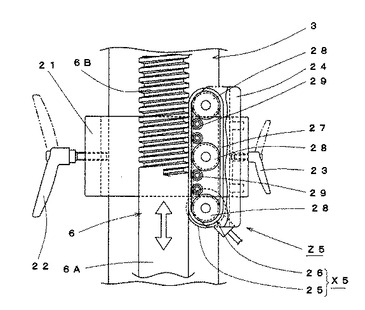
「第6の実施形態」
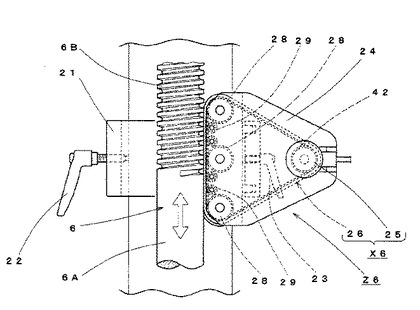
図12及び図13には、本願発明の第6の実施形態に係る診断装置Z6を前記電動弁1のヨーク3部分に取付けた状態を示している。この診断装置Z6は、前記第5の実施形態に係る診断装置Z5と基本構成を同じにするものであって、該診断装置Z5と異なる点は、前記クローラ26の検知信号の出力構造である。即ち、第5の実施形態に係る診断装置Z5においては、前記クローラ26の前記各走行ローラ28のうち、一端側に位置する走行ローラ28に前記ロータリエンコーダ25を連結し、該走行ローラ28の回転を該ロータリエンコーダ25に入力するようにしていたが、この実施形態の診断装置Z6では、図12及び図13に示すように、前記クローラ26に設けられる三個の走行ローラ28とは別に、前記ベルト27に噛合して該ベルト27の走行に追従して回転する検知ローラ42を設け、検知ローラ42の回転を前記ロータリエンコーダ25に入力するように構成している。
【0091】
このような構成とした場合には、前記検知ローラ42の回転は、前記ベルト27の走行状態のみに支配され、該ベルト27が接触する前記弁棒6の表面状況(例えば、これが平滑面であるか、凹凸面であるか等の状況)には何等の影響も受けず、該ベルト27の走行状態を忠実に反映したものとなり、より高精度で信頼性の高い情報取得が可能となる。尚、図12及び図13の各構成部材には、図10及び図11において各構成部材に付したと同じ符号を付すことで、ここでの説明を省略する。
【0092】
「第7の実施形態」
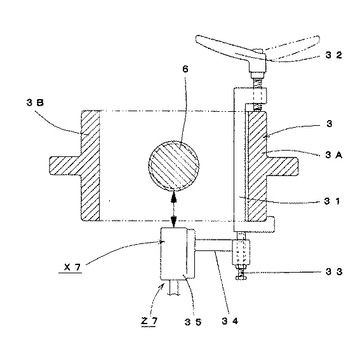
図14には、本願発明の第7の実施形態に係る診断装置Z7を前記電動弁1のヨーク3部分に取付けた状態を示している。この診断装置Z7は、弁棒移動情報取得手段X7を主体とするものであって、該弁棒移動情報取得手段X7によって、前記弁棒6のうち、前記ヨーク3の左右一対の支柱部3A,3B間に露出している部分においてその動きを計測し、電動弁診断の基礎情報となる前記弁棒6の作動状態、即ち、開弁側又は閉弁側への移動方向と移動量を取得する。
【0093】
前記弁棒移動情報取得手段X7は、前記ヨーク3の支柱部3Aにクランプ32によって固定した固定ブラッケット31に支持ブラッケット34を介して取り付けられた光学式センサ35で構成される。この場合、前記支持ブラッケット34を調整ネジ33によって前記固定ブラッケット31に連結し、前記光学式センサ35の前記弁棒6に対する設置位置を前記調整ネジ33のねじ込み量で調整できるようにしている。
【0094】
ここで、前記光学式センサ35は、前記弁棒6の前記ヨーク3における露出部位の変位を光学的に取得し、この取得情報基づいて前記弁棒の移動方向と移動量を取得するものであって、この実施形態では画像処理用のCCDカメラで構成している。このCCDカメラで構成された光学式センサ35においては、撮影された前記弁棒6の表面の模様等の撮像を画像データとして処理ユニットへ出力する。処理ユニットでは、光学式センサ35から入力された画像データを画像処理してその位置を特定して認識し、その特定位置がどの方向へ、どれぐらい移動したか、等の情報を取得する。
【0095】
この場合、撮像の画像処理という手法を用いることから、撮像の変化が明確に判別できる場合、例えば、弁棒の停止状態からの移動開始時点とか、逆に、弁棒の移動状態からの停止時点の検出は高精度に行えるので、弁棒の移動距離、即ち、バルブストロークに関する情報の取得には有利である。
【0096】
また、このような画像処理方式のセンサ以外の光学式センサ35としては、例えば、光源から前記弁棒6の表面に光を照射し、該表面で反射した反射光を受けてこれを光電変換して位置信号として出力するとともに、この出力値に基づいてその座標上に位置を特定して認識し、該認識位置の変化から前記弁棒6がどの方向へ、どれぐらい移動したか、を検出するもの等、種々のものが採用できる。
【0097】
この光学式センサ35を用いた弁棒移動情報取得手段X7は、該光学式センサ35が直接弁棒6に接触しない非接触形であることから、電動弁1の運転中でもその作動に何等の支障を及ぼすことなく計測できる、延いては診断時期が制約されないという、特有の利点がある。
【0098】
また、この実施形態の弁棒移動情報取得手段X7は、前記弁棒6の軸方向への移動状態を光学式センサ35によって非接触で取得するものであって、その取得精度は、弁棒6と光学式センサ35の対向間隔の変化によって影響を受けることはなく、例えば、前記弁棒6が曲がり変形を生じており、その軸方向移動に伴って該弁棒6弁棒6と光学式センサ35の対向間隔の変化するような場合であっても、該弁棒6の移動方向と移動量を高い精度で取得することができる。
【0099】
「各実施形態の診断装置に共通する作用効果」
ここで、前記各実施形態の診断装置Z1〜Z7に共通する作用効果について説明すると以下の通りである。
【0100】
前記各実施形態に係る各診断装置Z1〜Z7は、それぞれ前記弁棒移動情報取得手段X1〜X7を主体として構成されるものであるが、これら各弁棒移動情報取得手段X1〜X7が、前記電動弁1の前記ヨーク3部分に設置され、前記弁棒6のうち、前記ヨーク3部分において外部へ露出した部分の動きからその軸方向変位に関する移動情報を取得するものであることから、例えば、従来の測定棒式あるいはワイヤ式の取得手段のように、電動弁1への設置に際して該電動弁1の一部を開放して行う必要がない。
【0101】
この結果、電動弁1の一部を開放する場合のように、診断装置Z1〜Z7の設置作業に際して電動弁1に関する専門技術を必要とせず、且つ開放作業が無い分だけ設置に伴う作業量も少なく、これらの相乗効果として、設置作業の簡易化及び迅速化が促進される。
【0102】
また、電動弁の一部を開放することなく該電動弁の機能を維持したまま、弁棒の軸方向変位に関する移動情報を取得することができるので、移動情報の取得作業を、電動弁が備えられた配管系の稼動状況に左右されることなく、必要に応じて任意に行うことができ、延いては、電動弁の診断における時期的な要求に柔軟に対応できる。
【0103】
さらに、前記弁棒6の移動情報を、該弁棒6の前記ヨーク3部分における露出部位での計測により取得するものであることから、例えば、従来の測定棒式の取得手段のように電動弁1の内部に充填されたグリースの粘性抵抗によって測定精度が左右されるということがなく、精度の高い移動情報を簡易に取得することができる。
【0104】
また、前記各診断装置Z1〜Z7を構成する前記各弁棒移動情報取得手段X1〜X7を、前記弁棒6の一部が露出する前記ヨークヨーク3部分に取付けるように構成しているので、前記電動弁1に前記弁棒移動情報取得手段X1〜X7を設置した状態においても、該弁棒移動情報取得手段X1〜X7は前記電動弁1の高さ範囲内に納められ、例えば、従来の測定棒式取得手段のように測定棒が前記電動弁1の上方側に突出するようなことが無いことから、前記電動弁の設置状態においてその上方に十分な作業スペースを確保できないような場合であっても、前記各弁棒移動情報取得手段X1〜X7(即ち、前記各診断装置Z1〜Z7)を前記電動弁に対して容易に設置することができ、それだけ前記各診断装置Z1〜Z7の適用可能範囲が拡大され、延いては該診断装置Z1〜Z7の汎用性が向上することになる。
【0105】
「電動弁1の診断内容等」
続いて、前記各診断装置Z1〜Z7の何れかを用いて行われる前記電動弁1の診断内容等について説明する。
【0106】
前記弁棒6の移動情報に基づいて診断可能な項目としては、ステムナットの磨耗の診断、ロッキングナットの緩みの診断、弁体吊部の磨耗の診断、バルブストロークの診断、トルクスイッチの作動点の診断、
リミットスイッチの作動点の診断、ロータスイッチの作動点の診断、トルクバイパススイッチの作動点の診断がある。
【0107】
これらの診断項目のうち、ステムナットの磨耗の診断は本願発明がその目的の一つとするものである。ここでは、ステムナットの磨耗の診断を中心に、上記各診断項目のそれぞれを具体的に説明するが、これに先立って、これらの各診断の前提技術として、電動弁の作動に伴う各種センサの出力特性を、図19に示す特性図に基づいて説明する。
【0108】
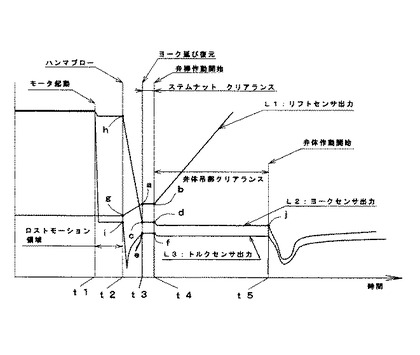
図19は、電動弁を全閉状態から開作動させた時における、リフトセンサの出力(特性線L1)と、ヨークセンサの出力(特性線L2)と、トルクセンサの出力(特性線L3)を示している。
【0109】
ここで、開作動時における弁棒等の挙動を簡単に説明する。モータが起動されると(時間t1)、ロストモーション領域を経て、ハンマブローが発生し、ステムナット側にモータの回転力が伝達され、弁棒の圧縮状態(全閉時の締切力による圧縮)が開放され(時間t2)、ヨークの伸びが復元される(時間t3)。ヨークの伸びが復元すると、その時点からステムナットが回転するが、ステムナットと弁棒のネジ部の間のクリアランス(以下、「ステムナットクリアランス」という)が消滅するまで、弁棒は作動せず停止状態を保持する。前記ステムナットクリアランスが消滅すると(時間t4)、その時点から弁棒の引き上げ方向の作動が開始される。しかし、弁棒の作動が開始されても、弁体吊部における弁棒とのクリアランス(以下、「弁体吊部クリアランス」という)が消滅するまでは弁体は停止状態とされ、該弁体吊部クリアランスが消滅した時点(時間t5)から、弁体の開方向への作動が開始される。このような弁棒等の挙動に対応して、前記各センサ出力が変化する。
【0110】
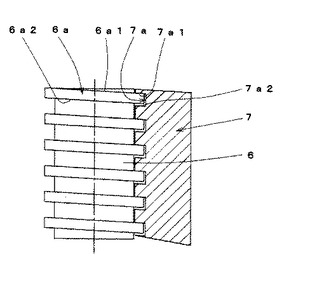
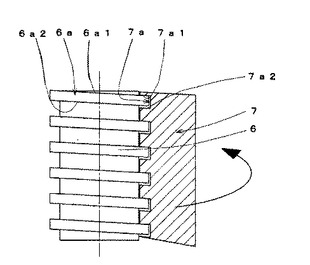
ここで、ハンマブローの発生から弁棒作動開始までの間における弁棒6とステムナット7の噛合状態の変化を、図15〜図18に示す模式図及び図19に示す作動特性図を参照して説明する。
【0111】
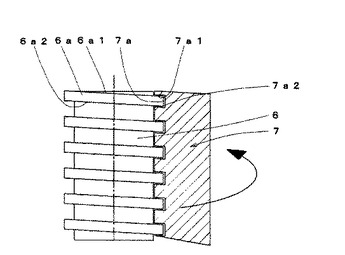
ハンマブローが生じた時点(図19の時間t2)では、図15示すように、前記ヨーク3の伸びによって、前記弁棒6のネジ山6aの上面6a1が前記ステムナット7のネジ溝7aの上面7a1に当接した状態となっている。この状態は、ヨーク伸びの復元時点(時間t3)まで維持され変化しない(図16参照)。即ち、この時間t2から時間t3の間は、前記弁棒6が前記ステムナット7と一体的に動いている状態で、これら両者間には軸方向における相対変位は生じない。
【0112】
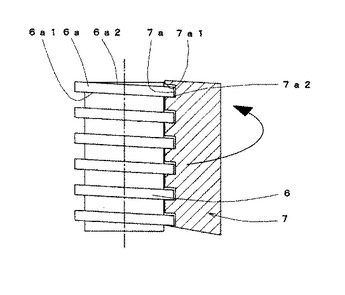
時間t3において、前記ヨーク3の伸びが復元すると、図17に示すように、前記弁棒6のねじ山6aの上面6a1は前記ステムナット7のネジ溝7aの上面7a1から離れるが、該ステムナット7のネジ溝7aと前記弁棒6のネジ山6aの間にステムナットクリアランスが存在するため、このステムナットクリアランスの分だけ前記弁棒6とステムナット7が軸方向へ相対変位するまでの間(時間t3〜時間t4の間)、前記弁棒6は移動しない。
【0113】
時間t4に達すると、図18に示すように、前記弁棒6のネジ山6aの下面6a2が前記ステムナット7のネジ溝7aの下面7a2に当接し、この時点から、前記ステムナット7の回転によって前記弁棒6が開弁方向へ作動を開始する。
【0114】
ここで、前記「リフトセンサ」は、前記弁棒6の移動情報を取得するものであって、本願発明における前記弁棒移動情報取得手段X1〜X7がこれに該当し、該記弁棒移動情報取得手段X1〜X7により取得される弁棒6の移動情報が図19における特性線L1として表れる。この特性線L1に示すように、リフトセンサの出力は、ハンマブローに伴うヨークの伸び(全閉時の締切力による伸び)の復元とともに僅かに上昇変化し、ヨークの伸びが完全に復元された時点(時間t3)に至って停止し、この停止状態はステムナットクリアランスが消滅するまで(時間t4)継続され、その後は略一定の増加率で上昇変化する。
【0115】
そして、このリフトセンサ出力には、ヨークの伸びの復元時点である「点a」(時間t3)と、弁棒の作動開始時点である「点b」(時間t4)の二点において顕著な変化点が表れるため、この二つの変化点を弁棒の移動情報として取得し、これを電動弁の機能に関する診断(例えば、ステムナットの磨耗の診断)に用いる。
【0116】
また、リフトセンサ出力は、弁棒の移動量と移動時間として表されるものであることから、取得されたリフトセンサの出力値に基づいて、弁棒6の移動速度を演算にて取得することができる。この弁棒6の移動速度は、後述のように、ステムナットの磨耗の診断において用いられる。
【0117】
前記「ヨークセンサ」は、電動弁の前記ヨーク3部分に装着されて該ヨーク3に発生する応力(即ち、電動弁の開作動時における圧縮力、閉作動時における引張力)を取得するためのものであって、該応力の変化が前記ヨークセンサ出力として表される。この、ヨークセンサ出力は、ハンマブローによって引張作用が開放されると(時間t2)、急速に低下し、ヨークの伸び復元時点(時間t3)で低下が停止され、その後、弁棒の作動が開始される時点(時間t4)まで変化せずに推移する。そして、時間t4において、弁棒の作動が開始されると、先ず低下側へ移行した後、所定の引張応力(即ち、弁棒の外周に備えられたシールパッキンの摺動抵抗による引張力)を保持したまま、弁体吊部クリアランスが消滅する時点(時間t4)まで推移し、弁体吊部クリアランスが消滅すると、弁体の引き抜きに伴って急激に低下した後、弁体移動中の負荷に対応した応力まで復帰してこれが持続される。
【0118】
そして、このヨークセンサ出力には、ヨークの伸びの復元時点である「点c」(時間t3)と、弁棒の作動開始時点である「点d」(時間t4)の二点において顕著な変化点が表れるため、この二つの変化点を弁棒の移動情報として取得し、これを電動弁の機能に関する診断(例えば、ステムナットの磨耗の診断)に用いるものである。
【0119】
この場合、リフトセンサ出力における「点a」と「点b」は、ヨークセンサ出力における「点c」と「点d」に時間的に合致する。従って、電動弁の診断に際して、リフトセンサ出力における変化点である「点a」、「点b」と、ヨークセンサ出力における変化点である「点c」、「点d」を、適宜選択して用いることができ、後述の診断例ではこれを適用している。
【0120】
一方、トルクセンサ出力は、例えば、電動弁に装備されたスプリングカートリッジ部分に取り付けられた内蔵式のトルクセンサによって取得されるものであって、ここでは前記リフトセンサ出力及びヨークセンサ出力との対比の意味で提示したものであり、電動弁の診断には用いていない。しかし、図19に示すように、このトルクセンサ出力は、ヨークの伸び復元時点以降においてはヨークセンサ出力と同様の変化を示し、ヨークセンサ出力における「点c」と「点d」に対応する「点e」と「点f」をもつことから、ヨークセンサ出力に代えて、このトルクセンサ出力を電動弁の診断に用いることは可能である。
【0121】
続いて、前記各診断項目のそれぞれについて、その具体的内容を説明する。
【0122】
「ステムナットの磨耗の診断」
ステムナットの磨耗の診断は、基本的には、現時点におけるステムナットクリアランスの大きさと、例えば、ステムナット交換直後におけるステムナットクリアランスの大きさの差分の大きさから、ステムナットの磨耗の進行状態とか、現在の磨耗の進行状態下におけるステムナットの機能の劣化状態の判断、あるいはステムナットの次回の交換時期の予測等を行うものである。
【0123】
ここで、ステムナットの磨耗の診断の基礎となる前記ステムナットクリアランスの取得は、以下のようにして行われる。即ち、ステムナットクリアランスは上述のように、図19における伸び復元時点(リフトセンサ出力における点a及びヨークセンサ出力における点cに対応する時間t3の時点)と、弁棒作動開始時点(リフトセンサ出力における点c、及びヨークセンサ出力における点dに対応する時間t4の時点)の差分「t4−t3」として表れる。また、この時間の差分としてのステムナットクリアランスは、その存在時間として観念的に求められたものであり、これを磨耗量(寸法)として定量的に求めるためには、前記時間「t4−t3」に弁棒6の移動速度をかけて演算により求めることが必要である。このような弁棒の移動情報の取得形態としては、大きく分けて以下の二つの手法がある。
【0124】
その一つの手法は、前記ヨークの伸び復元時点及び弁棒作動開始時点を、前記リフトセンサ出力又はヨークセンサ出力から取得するものとし、且つその際、これら伸び復元時点と弁棒作動開始時点の少なくとも何れか一方は前記リフトセンサ出力から取得する一方、前記弁棒の移動速度については、前記リフトセンサ出力の点b以降の領域で且つ出力値が安定した領域内において、時間と変化量の関係(即ち、前記特性線L1の傾き)として演算により求める(即ち、実測値として求める)か、例えば、設計仕様における弁棒の移動速度をそのまま用いるかを選択するものである。即ち、この手法においては、前記ヨークの伸び復元時点と弁棒作動開始時点の二つの情報の双方をヨークセンサ出力から取得するものは除外されており、また弁棒の移動速度をリフトセンサ出力に基づいて実測値として求めるもののみには限定していない。
【0125】
他の一つの手法は、前記ヨークの伸び復元時点及び弁棒作動開始時点を、共に前記ヨークセンサ出力から取得する一方、前記弁棒の移動速度は前記リフトセンサ出力に基づいて実測値として求めるものである。
【0126】
そして、ステムナットの磨耗量は、上述の如くして取得された現時点でのステムナットクリアランス量から、例えば、ステムナット交換直後(即ち、ステムナットが磨耗していないと認められる時点)におけるステムナットクリアランス量を差し引くことで求められる。この求められたステムナットの磨耗量の大きさから、ステムナットの磨耗の進行状態とか、現在の磨耗の進行状態下におけるステムナットの機能の劣化状態の判断、あるいはステムナットの次回の交換時期の予測等を行うものである。
【0127】
このステムナットの磨耗の診断においては、弁棒の移動情報を、前記二つの手法のうちの何れの手法を採用しても、得られる診断結果には殆ど差異は無く、何れにおいても高精度で信頼性の高い診断結果が得られる。
【0128】
「ロッキングナットの緩みの診断」
ロッキングナットは、ステムナットの上端側に配置されて該ステムナットの軸方向のガタツキを防止するためのものであって、その診断は、ロッキングナットが緩んでいるかどうかを判断するものである。このロッキングナットが緩むと、ステムナットに軸方向のガタツキが生じるため、このガタツキの大きさを取得し、この取得情報に基づいてロッキングナッとの緩みの有無を診断すれば良い。
【0129】
第1には、ロッキングナットが緩んでステムナットに軸方向のガタツキが生じると、正常時(ロッキングナットに緩みがない状態)に比して、ハンマブローの発生時点に遅れが生じる(所謂、ハンマブロー遅れ)。ここで、図19のリフトセンサ出力の特性線L1に示すように、ハンマブロー時点(時間t2)においては、該特性線L1が「点g」において顕著な変化を示す。従って、ハンマブローに伴う前記リフトセンサ出力の変化点である「点g」の出現時点が、正常時における出現時点に比して、許容範囲以上に遅れているかどうかを見れば、ロッキングナットの緩みの有無を判断することができる。
【0130】
第2には、ロッキングナットが緩んでステムナットに軸方向のガタツキが生じると、正常時に比して、弁棒作動開始時点に遅れが生じる(所謂、弁棒作動開始遅れ)。ここで、図19のリフトセンサ出力の特性線L1に示すように、弁棒作動開始時点(時間t4)においては、該特性線L1が「点b」において顕著な変化を示すことは既述の通りである。従って、このリフトセンサ出力の変化点である「点b」の出現時点が、正常時における出現時点に比して、許容範囲以上に遅れているかどうかを見れば、ロッキングナットの緩みの有無を判断することができる。
【0131】
尚、ここでは弁棒の移動情報を取得する前記リフトセンサの出力に基づいてロッキングナットの緩みの有無を診断する場合について説明したが、図19に示すように、ハンマブロー発生時点は、ヨークセンサ出力の特性線L2においては「点h」が、トルクセンサ出力の特性線L3においては「点i」が、それぞれ変化点として表れ、また弁棒作動開始時点は、ヨークセンサ出力の特性線L2においては「点d」が、トルクセンサ出力の特性線L3においては「点f」が、それぞれ変化点として表れることから、他の実施形態においては、ヨークセンサ出力あるいはトルクセンサ出力に基づいてロッキングナットの緩みの有無を診断することもできる。
【0132】
「弁体吊部の磨耗の診断」
弁体吊部の磨耗状態は、図19に示すように、ヨークセンサ出力に基づいて、弁棒作動開始時点(時間t4)から弁体作動開始時点(時間t5)までの時間で表される弁体吊部クリアランスを、正常時における弁体吊部クリアランスと比較することで診断できる。この場合、ヨークセンサ出力の特性線L2において弁棒作動開始時点である「点d」は、リフトセンサ出力の特性線L1において弁棒作動開始時点である「点d」と対応することから、上述のようにヨークセンサ出力のみに基づいて診断するのに代えて、ヨークセンサ出力とリフトセンサ出力の双方に基づいて診断することもできる。
【0133】
また、図19からも判るように、ヨークセンサ出力の特性線L2における「点d」及びリフトセンサ出力の特性線L1における「点d」は、ともに変化点であるものの、その変化量が小さいため、特性線上では読みづらい場合もある。このような場合には、変化量が大きい変化点であるヨークセンサ出力の特性線L2における「点c」から「点j」までの時間に弁棒の移動速度をかけて取得されるヨーク伸び復元時点からの弁棒の移動量を求め、この移動量から、上述のステムナットの磨耗量を差し引くことで弁体吊部の磨耗量を取得することもできる。従って、この場合には、前記リフトセンサ出力が必須となる。
【0134】
「バルブストロークの診断及びトルクスイッチの作動点の診断」
バルブストロークの診断とトルクスイッチの作動点の診断は、相互に関連するものである。即ち、バルブストロークの診断は、弁体の開作動あるいは閉作動においてトルクスイッチが作動した時点における弁棒位置(即ち、弁体位置)をリフトセンサによって測定して取得し、この取得位置が設計上の位置に対して許容範囲内にあるかどうかで、その適否を診断するものである。そして、トルクスイッチが作動した時点における弁棒位置が許容範囲内の適正位置でない場合には、トルクスイッチの作動点が適正でないと診断されるものでる。
【0135】
「リミットスイッチの作動点の診断」
リミットスイッチの作動点の診断は、弁体の開作動あるいは閉作動においてリミットスイッチが作動した時点における弁棒位置(即ち、弁体位置)をリフトセンサによって測定して取得し、この取得位置が設計上の位置に対して許容範囲内にあるかどうかで、その適否を診断するものである。そして、リミットスイッチが作動した時点における弁棒位置が許容範囲内の適正位置でない場合には、トルクスイッチの作動点が適正でないと診断されるものでる。
【0136】
「ロータスイッチの作動点の診断及びトルクバイパススイッチの作動点の診断」
ロータスイッチの作動点の診断及びトルクバイパススイッチの作動点の診断は相互に関連するもので、通常、トルクバイパススイッチとして、ロータスイッチが用いられている。このトルクバイパススイッチは、開作動時に最大トルクが発生する弁体引き抜き時に、トルクスイッチが作動して開作動が停止されるのを防ぐためにトルクスイッチをバイパスさせるものである。
【0137】
そして、トルクバイパススイッチが作動して弁体の開作動が停止されたときの弁棒位置(弁体位置)をリフトセンサによって測定し、そのときの弁棒位置が弁体引き抜き時点での弁棒位置よりも開側であるか否かによってトルクバイパススイッチの作動点の適否を診断し、これが適正でない場合はロータスイッチの作動点の設定が適正でないということであるため、該ロータスイッチの作動点を設定し直すものである。
【0138】
尚、以上の説明では、弁棒の移動情報に基づいて電動弁の機能に関する診断を行う場合の手法等を、電動弁の開作動時を例にとって説明したが、本願発明はこれに限定されるものではなく、電動弁の閉作動時においても適用できることは勿論である。
【図面の簡単な説明】
【0139】
【図1】本願発明の第1の実施形態に係る診断装置を備えた電動弁の全体図である。
【図2】図1のII−II矢視図である。
【図3】図2のIII−III矢視図である。
【図4】図2のIV−IV矢視図である。
【図5】図4に示した状態からの変化状態図である。
【図6】本願発明の第2の実施形態に係る診断装置を電動弁のヨーク部分に装着した状態を示す断面図である。
【図7】図6のVII−VII矢視図である。
【図8】本願発明の第3の実施形態に係る診断装置を電動弁のヨーク部分に装着した状態を示す断面図である。
【図9】本願発明の第4の実施形態に係る診断装置を電動弁のヨーク部分に装着した状態を示す断面図である。
【図10】本願発明の第5の実施形態に係る診断装置を電動弁のヨーク部分に装着した状態を示す断面図である。
【図11】図10のXI−XI矢視図である。
【図12】本願発明の第6の実施形態に係る診断装置を電動弁のヨーク部分に装着した状態を示す断面図である。
【図13】図12のXIII−XIII矢視図である。
【図14】本願発明の第7の実施形態に係る診断装置を電動弁のヨーク部分に装着した状態を示す断面図である。
【図15】弁棒とステムナットの第1の相対位置関係の説明図である。
【図16】弁棒とステムナットの第2の相対位置関係の説明図である。
【図17】弁棒とステムナットの第3の相対位置関係の説明図である。
【図18】弁棒とステムナットの第4の相対位置関係の説明図である。
【図19】電動弁の弁棒のリフト特性グラフである。
【図20】電動弁の閉作動時におけるスリップ発生時のバルブリフト特性図である。
【図21】従来の電動弁における弁棒位置の検出状態説明図である。
【符号の説明】
【0140】
1 電動弁
2 弁体収納部
3 ヨーク
4 弁体駆動部
5 モータ
6 弁棒
7 ステムナット
8 弁体
11 固定ブラッケット
12 クランプ
13 クランプ
14 支持ブラケット
15 ロータリエンコーダ
16 ローラ
21 固定ブラッケット
22 クランプ
23 クランプ
24 支持ブラッケット
25 ロータリエンコーダ
26 クローラ
27 ベルト
28 走行ローラ
29 押圧ローラ
30 固定ブラッケット
31 レーザセンサ
32 可動ブラッケット
33 スプリング
34 調整ネジ
35 リニアガイド
36 測定点
37 回転軸
38 測定用ローラ
39 磁気ヘッド
40 測定用ローラ
41 光学式センサ
42 検出用ローラ
43 磁気テープ
X1 弁棒移動情報取得手段
X2 弁棒移動情報取得手段
X3 弁棒移動情報取得手段
X4 弁棒移動情報取得手段
X5 弁棒移動情報取得手段
X6 弁棒移動情報取得手段
X7 弁棒移動情報取得手段
Z1 診断装置
Z2 診断装置
Z3 診断装置
Z4 診断装置
Z5 診断装置
Z6 診断装置
Z7 診断装置
【技術分野】
【0001】
本願発明は、電動弁の弁棒の移動情報に基づいて電動弁の機能に関する診断を行う電動弁の診断装置及び診断方法に関するものである。
【背景技術】
【0002】
電動弁においては、該電動弁が保有する機能を維持し信頼性の高い作動を確保するために、定期的あるいは必要に応じて、その機能に関する診断を行うことが必要である。この電動弁の機能に関する診断項目は種々存在するが、その中でも、例えば、駆動力伝達系の磨耗状態とか、弁体の停止位置、あるいはリミットスイッチ類の作動位置等の電動弁の機能に関する事項の診断は、モータ側の回転力を弁体の開閉駆動力として伝達する弁棒の移動情報に基づいて診断することが可能である。このような電動弁の機能に関する診断を行う場合時の基礎データとしての「弁棒の移動情報」を取得するための手法として、測定棒式取得手法(特許文献1及び特許文献2参照)とかワイヤ式取得手法(特許文献3参照)が提案されている。
【0003】
測定棒式取得手法は、弁棒の頭頂部に、該弁棒の軸方向に移動可能に配置された測定棒の一端を接触させ、前記弁棒の移動情報(移動方向、移動速度、移動量等)を、該弁棒の動きに追従する前記測定棒の変位に基づいて取得する手法である。
【0004】
図21には、前記測定棒式の取得手法の基本的な構成を示している。この測定棒式の取得手法では、測定作業に際して、電動弁101の上端部を開放し、ここにセンサ取付台102を介してセンサ103と測定棒104を取り付けるとともに、該測定棒104の下端を弁棒105の頭頂部105に当接させ、該弁棒105の昇降動に追従してこれと一体的に前記測定棒104が昇降動するようにし、この測定棒104の動きを前記センサ103で検出し、所要の移動情報を取得するように構成している。
【0005】
ここで、特許文献1に示されるものでは、前記センサ103として摺動抵抗器を用い、弁棒105の変位に応じて測定棒104(摺動子)が動き、この抵抗変化に応じて電気信号を出力するようにしている。また、特許文献2に示されるものでは、前記測定棒104にラックを刻設し、このラックに噛合するピニオンの回転量をロータリエンコーダによって検出し、これを弁棒105の変位量に対応する信号として出力するように構成している。
【0006】
一方、特許文献3に示されるワイヤ式取得手法は、ワイヤの一端を弁棒の頭頂部に固定するとともに、他端を、弁棒カバーに取り付けたエンコーダのプーリーに連結し、弁棒の変位に追従する前記ワイヤの移動量を前記プーリーの回転量として前記エンコーダで検出し、この検出値を弁棒の変位量に対応する信号として出力するように構成している。
【0007】
【特許文献1】特開平7−4549号公報
【特許文献2】実開平6−82483号公報
【特許文献3】特開平2−307033号公報。
【発明の開示】
【発明が解決しようとする課題】
【0008】
ところが、前記測定棒式の取得手法においては、弁棒情報を取得するための測定作業に際し、電動弁101の一部を開放して前記測定棒104を設置する必要があることから、その設置作業には電動弁に関する専門技術をもった作業者を必要とし、測定棒104の設置作業そのものに制約がある。
【0009】
また、このように電動弁の一部を開放するとその開放によって電動弁の機能が停止されるため、該電動弁を備えた配管系の稼動の確保という観点から、測定作業に時期的な制約がある。
【0010】
さらに、弁棒105の頭頂部105aに測定棒104を設置した状態では、前記電動弁101の上端から上方へ前記測定棒104が大きく突出することから、該電動弁101の上方に、前記測定棒104の設置時には十分な作業スペースを、また、該測定棒104を用いた測定作業時には弁棒の動きに追従する前記測定棒104の動きを阻害しないような十分な作動スペースを、それぞれ確保することが必要であり、そのため、電動弁101の設置状況(周辺スペースとの関係等)によっては、測定棒104を用いた測定そのものが実施できないということも起こり得る。
また、前記弁棒105の周りには粘性抵抗の高いグリースが充填されているため、このグリースの粘性抵抗によって、前記弁棒105の動作時に前記測定棒104が弁棒105の頭頂部105aから浮き上がるなど、前記弁棒105に対する前記測定棒104の追従性が損なわれ、その結果、精度の良い測定が行えないこともある。
【0011】
一方、ワイヤ式の取得手法においては、前記測定棒式の取得手法の場合と同様に、電動弁の一部を開放した状態でワイヤを設置する必要があることから、その設置作業には専門技術をもった作業者を必要とするとともに、電動弁の一部を開放することで該電動弁の機能が停止されることから、ワイヤの設置作業及び該ワイヤを用いた測定作業に時期的な制約がある。
【0012】
また、ワイヤは、可撓性を有し、その軸方向への圧縮力に対しては弛みを生じ得るものであることから、特に弁棒の動きが早い電動弁の場合には、ワイヤが弁棒の動きに追従できず一時的に弛みを生じ、その結果、精度の良い測定ができないという場合もある。
【0013】
そこで、本願発明は電動弁の一部を開放することなく簡易に取付けることができ、しかも高精度で信頼性の高い診断結果を得ることができる電動弁の診断装置及び該診断装置を用いた診断方法を提案することを主たる目的としてなされたものである。
【課題を解決するための手段】
【0014】
本願発明では、前記課題を解決するために以下のような構成を採用している。
【0015】
本願の第1の発明(態様)では、弁棒に連結された弁体が開閉動可能に収納された弁体収納部と、回転駆動力が付与されたウォームの回転駆動力を利用して前記弁棒に螺合するステムナットを回転させることで前記弁棒を昇降駆動して前記弁体を開閉する弁体駆動部と、前記弁体収納部と前記弁体駆動部を連結するヨークとを備えてなる電動弁の機能に関する診断を行う診断装置において、前記弁棒の外部露出部位に対応するように電動弁の外表面部分に設けられて該外部露出部位での計測により前記弁棒の移動に関する情報を取得する弁棒移動情報取得手段と、該弁棒移動情報取得手段により取得された移動情報に基づいて前記電動弁の機能に関する診断を行う診断手段を備えたことを特徴としている。
ここで、「弁棒の移動情報」とは、弁棒の軸方向への移動に係る情報で、具体的には、弁棒の移動方向、移動量、移動速度、移動開始時点、移動停止時点、移動位置等の情報をいう。また、「電動弁の機能」とは、電動弁が本来的に備える機構上の働きとか作用であって、本願発明では、弁棒を介して弁体を駆動する駆動力伝達機能とか、弁体の開閉機能とか、弁体の作動及び停止機能等をいう。さらに、「機能に関する診断」とは、前記各機能が正常に働いているか否か、各機能が劣化しているか否か、等を診断することをいう。
【0016】
そして、本願の第1の発明は、これらの「機能に関する診断」を、弁体を駆動する弁棒の軸方向変位に係る「弁棒の移動情報」に基づいて診断するものである。
本願の第2の発明では、前記第1の発明に係る電動弁の診断装置において、前記弁棒移動情報取得手段を、前記弁棒の外部露出部位の表面に接触状態で、又は非接触状態での計測により前記弁棒の移動情報を取得する構成としたことを特徴としている。
本願の第3の発明では、前記第2の発明に係る電動弁の診断装置において、前記弁棒移動情報取得手段を、前記弁棒の外部露出部位の表面に接触して該弁棒の軸方向変位に追従して回転するローラと、該ローラの回転方向と回転量を検出する検出器を備え、該検出器により検出された回転方向と回転量に基づいて前記弁棒の移動情報を取得する構成とするとともに、前記ローラの回転半径と前記回転量に基づいて前記弁棒の移動量を算出するに際して前記ローラの回転半径を該ローラの撓み変形量に対応して補正する補正手段を備えたことを特徴としている。
【0017】
本願の第4の発明では、弁棒に連結された弁体が開閉動可能に収納された弁体収納部と、回転駆動力が付与されたウォームの回転駆動力を利用して前記弁棒に螺合するステムナットを回転させることで前記弁棒を昇降駆動して前記弁体を開閉する弁体駆動部と、前記弁体収納部と前記弁体駆動部を連結するヨークとを備えてなる電動弁の機能に関する診断方法において、前記弁棒の外部露出部位において該弁棒の移動に関する情報を取得し、取得された移動情報に基づいて電動弁の機能に関する診断を行うことを特徴としている。
【0018】
本願の第5の発明では、前記第4の発明に係る電動弁の診断方法において、前記ヨークの伸び又は縮みが復元した復元時点と、前記弁棒が実際に作動を開始する作動開始時点の少なくとも何れか一方を、前記弁棒の移動情報に基づいて取得し、前記ヨークの復元時点と前記弁棒の作動開始時点に基づいて前記弁棒のネジ部と前記ステムナットの間のクリアランスを求め、該クリアランスの大きさから前記ステムナットの磨耗状態を診断することを特徴としている。
【0019】
ここで、「ヨークの伸び又は縮みが復元した復元時点」としたのは、弁体の全閉状態からの開作動時には、ハンマブロー後にヨークの伸び復元現象が生じ、また弁体の全開状態からの閉作動時にはハンマブロー後にヨークの縮み復元現象が生じるためである。
また、「ヨークの伸び又は縮みが復元した復元時点と、前記弁棒が実際に作動を開始する作動開始時点の少なくとも何れか一方を、前記弁棒の移動情報に基づいて取得する」としたのは、これら「復元時点」と「作動開始時点」は、弁棒の移動情報に基づいて取得されるのに限らず、前記ヨークに作用する応力の変化に基づいても取得し得ることから、この第5の発明では、前記「復元時点」と「作動開始時点」の少なくとも何れか一方を弁棒の移動情報に基づいて取得することを特定したものである。
【0020】
本願の第6の発明では、前記第4の発明に係る電動弁の診断方法において、前記ヨークの伸び又は縮みの復元時点を、前記弁棒の移動情報、又は前記ヨークに発生する応力に関する情報に基づいて取得することを特徴としている。
【0021】
本願の第7の発明では、前記第4の発明に係る電動弁の診断方法において、前記弁棒の作動開始時点を、前記弁棒の移動情報、又は前記ヨークに発生する応力に関する情報に基づいて取得することを特徴としている。
【0022】
本願の第8の発明では、前記第4の発明に係る電動弁の診断方法において、前記ヨークの伸び又は縮みが復元した復元時点と、前記弁棒が実際に作動を開始する作動開始時点を、前記ヨークに発生する応力に関する情報に基づいて取得するとともに、前記弁棒の移動速度を前記弁棒の移動情報に基づいて取得し、これらの取得情報に基づいて前記弁棒のネジ部と前記ステムナットの間のクリアランスを求め、該クリアランスの大きさから前記ステムナットの磨耗状態を診断することを特徴としている。
【0023】
ここで、「弁棒の移動速度を弁棒の移動情報に基づいて取得する」としたのは、「弁棒の移動速度」は、計測によって取得される弁棒の移動時間と移動量に基づいて演算により取得される他に、例えば、電動弁の設計仕様によっても取得できるものであるところ、ここでは「弁棒の移動速度を弁棒の移動情報に基づいて取得する」ことを特定したものである。
【発明の効果】
【0024】
本願発明では次のような効果が得られる。
(a)本願の第1の発明に係る電動弁の診断装置では、前記弁棒の外部露出部位に対応するように電動弁の外表面部分に設けられて該外部露出部位での計測により前記弁棒の移動に関する情報を取得する弁棒移動情報取得手段と、該弁棒移動情報取得手段により取得された移動情報に基づいて前記電動弁の機能に関する診断を行う診断手段を備えている。
【0025】
従って、この発明の電動弁の診断装置によれば、
(a−1) 前記弁棒移動情報取得手段を前記電動弁の外表面部分に設置するものであって、その設置作業に際して電動弁の一部を開放する必要がないことから、その設置作業に電動弁に関する専門技術を必要とせず、且つ電動弁の一部の開放作業が無い分だけ設置に要する作業量も少なくなり、これらの相乗効果として、設置作業の簡易化及び迅速化が実現される、
(a−2) 電動弁の一部を開放することなく該電動弁の機能を維持したまま、弁棒の軸方向変位に関する移動情報を取得することができるので、移動情報の取得作業を、電動弁が備えられた配管系の稼動状況に左右されることなく、必要に応じて任意に行うことができ、延いては、電動弁の診断における時期的な要求に柔軟に対応できる、
(a−3) 前記弁棒の移動情報を、前記弁棒移動情報取得手段により該弁棒の外部露出部位での計測により取得するものであることから、例えば、従来の測定棒式の取得手段のように電動弁の内部に充填されたグリースの粘性抵抗によって測定精度が左右されるということがなく、精度の高い移動情報を簡易に取得することができる、
等の効果が得られる。
【0026】
(b)本願の第2の発明に係る電動弁の診断装置によれば、前記(a)に記載の効果に加えて次のような特有の効果が得られる。即ち、この発明では、前記弁棒移動情報取得検出手段を、前記弁棒の外部露出部位の表面に接触状態で、又は非接触状態での計測により前記弁棒の移動情報を取得する構成としているので、例えば、前記外部露出部位の表面に接触状態で計測する構成の場合にあっては、該弁棒の軸方向変位に追従してその移動方向と移動量が直接的に計測されることから、該弁棒の移動情報を高い精度をもって取得できる。また、前記外部露出部位の表面に非接触状態で計測する構成の場合にあっては、電動弁の運転中においても前記弁棒の作動に何等影響を与えることなくその作動状態を検出することができることから、診断作業に時期的な制約がなく、その任意性が向上する。
【0027】
(c)本願の第3の発明に係る電動弁の診断装置によれば、前記(b)に記載の効果に加えて次のような特有の効果が得られる。即ち、この発明では前記弁棒移動情報取得手段を、前記弁棒の外部露出部位の表面に接触して該弁棒の軸方向変位に追従して回転するローラと、該ローラの回転方向と回転量を検出する検出器を備え、該検出器により検出された回転方向と回転量に基づいて前記弁棒の移動情報を取得する構成とするとともに、前記ローラの回転半径と前記回転量に基づいて前記弁棒の移動量を算出するに際して前記ローラの回転半径を該ローラの撓み変形量に対応して補正する補正手段を備えているので、前記ローラの弾性変形量に影響されることなく、前記弁棒の移動量を正確に算出することができ、延いては、該弁棒の移動情報に基づく電動弁の機能に関する診断における診断精度及び診断結果の信頼性が共に向上することになる。
【0028】
(d)本願の第4の発明に係る電動弁の診断方法では、弁棒に連結された弁体が開閉動可能に収納された弁体収納部と、回転駆動力が付与されたウォームの回転駆動力を利用して前記弁棒に螺合するステムナットを回転させることで前記弁棒を昇降駆動して前記弁体を開閉する弁体駆動部と、前記弁体収納部と前記弁体駆動部を連結するヨークとを備えてなる電動弁の機能に関する診断方法において、前記弁棒の外部露出部位において該弁棒の移動に関する情報を取得し、取得された移動情報に基づいて電動弁の機能に関する診断を行ように構成したことを特徴としている。
【0029】
従って、この第4の発明に係る電動弁の診断方法によれば、前記弁棒の外部露出部位において該弁棒の軸方向変位に関する移動情報を検出するものであることから、例えば、電動弁の一部を開放して弁棒を露出させ、その軸方向変位に関する情報を取得する場合に比して、該情報を容易且つ迅速に取得でき、延いては該取得情報に基づく電動弁の機能に関する診断の作業性の向上及び診断コストの低減が可能となる。
【0030】
また、前記弁棒の移動情報を、該弁棒の外部露出部位での計測により取得するものであることから、例えば、従来の測定棒式の取得手段によって測定する場合のように電動弁の内部に充填されたグリースの粘性抵抗によってその測定精度が左右されるということがなく、精度の高い移動情報を簡易に取得することができる、
等の効果が得られる。
【0031】
(e)本願の第5の発明に係る電動弁の診断方法によれば、前記(d)に記載の効果に加えて次のような特有の効果が得られる。即ち、この発明では、前記ヨークの伸び又は縮みが復元した復元時点と、前記弁棒が実際に作動を開始する作動開始時点の少なくとも何れか一方を、前記弁棒の移動情報に基づいて取得し、前記ヨークの復元時点と前記弁棒の作動開始時点に基づいて前記弁棒のネジ部と前記ステムナットの間のクリアランスを求め、該クリアランスの大きさから前記ステムナットの磨耗状態を診断するもの、即ち、前記ステムナットの磨耗が直接的に反映される前記弁棒のネジ部と前記ステムナットの間のクリアランスに基づいて該ステムナットの磨耗状態を診断するものであることから、その診断が極めて精度良く行われ、信頼性の高い診断が実現される。
【0032】
また、前記ヨークの伸び又は縮みが復元した復元時点も、前記弁棒が実際に作動を開始する作動開始時点も、共に、弁棒の挙動の変化としてデータ上において如実に表れ且つその判断が容易であることから、これら復元時点と作動開始時点の少なくとも何れか一方を前記弁棒の移動情報に基づいて取得することで、これらの取得情報は信頼性の高い高精度のものとなり、延いては、これらの取得情報に基づいて行われる前記ステムナットの磨耗状態の診断の信頼性が担保される。
【0033】
さらに、この発明では、前記復元時点と作動開始時点の双方を前記弁棒の移動情報に基づいて取得することも含まれるが、係る構成とした場合には、前記効果がより一層顕著となるものである。
【0034】
(f)本願の第6の発明に係る電動弁の診断方法によれば、前記(d)に記載の効果に加えて次のような特有の効果が得られる。即ち、この発明では、前記ヨークの伸び又は縮みの復元時点を、前記弁棒の移動情報、又は前記ヨークに発生する応力に関する情報に基づいて取得するようにしている。この場合、前記復元時点は、前記弁棒の挙動の変化としても、また前記ヨークに発生する応力の変化としても、共に、データ上において如実に表れ且つその判断が容易であることから、前記復元時点を前記弁棒の移動情報に基づいて、又は前記ヨークに発生する応力に関する情報に基づいて取得することで、取得される前記復元時点に関する情報は信頼性の高い高精度のものとなり、延いては、この取得情報に基づいて行われる前記ステムナットの磨耗状態の診断の信頼性が担保される。
【0035】
(g)本願の第7の発明に係る電動弁の診断方法によれば、前記(d)に記載の効果に加えて次のような特有の効果が得られる。即ち、この発明では、前記弁棒の作動開始時点を、前記弁棒の移動情報、又は前記ヨークに発生する応力に関する情報に基づいて取得するようにしている。この場合、前記弁棒の作動開始時点は、前記弁棒の挙動の変化としても、また前記ヨークに発生する応力の変化としても、共に、データ上において如実に表れ且つその判断が容易であることから、前記作動開始時点を前記弁棒の移動情報に基づいて、又は前記ヨークに発生する応力に関する情報に基づいて取得することで、取得される前記作動開始時点に関する情報は信頼性の高い高精度のものとなり、延いては、この取得情報に基づいて行われる前記ステムナットの磨耗状態の診断の信頼性が担保される。
【0036】
(h)本願の第8の発明に係る電動弁の診断方法によれば、前記(d)に記載の効果に加えて次のような特有の効果が得られる。即ち、この発明では、前記ヨークの伸び又は縮みが復元した復元時点と、前記弁棒が実際に作動を開始する作動開始時点を、前記ヨークに発生する応力に関する情報に基づいて取得するとともに、前記弁棒の移動速度を前記弁棒の移動情報に基づいて取得し、これらの取得情報に基づいて前記弁棒のネジ部と前記ステムナットの間のクリアランスを求め、該クリアランスの大きさから前記ステムナットの磨耗状態を診断するようにしているので、前記弁棒の移動速度は、前記弁棒移動情報取得手段により取得される現在の弁棒の移動情報、即ち、実測データに基づいて取得されることとなり、例えば、弁棒の移動速度を電動弁の設計仕様に基づいて取得するような場合に比して、より実際的な診断が実現され、信頼性の高い診断結果が得られる。
【発明を実施するための最良の形態】
【0037】
以下、本願発明に係る電動弁の診断装置及びその診断方法を、幾つかの好適な実施形態(実施の形態)に基づいて具体的に説明する。
【0038】
「第1の実施形態」
図1には、本願発明の第1の実施形態に係る診断装置Z1を備えた電動弁1を示しており、同図において符号2は弁体収納部、4は弁体駆動部であって、該弁体収納部2と弁体駆動部4はヨーク3を介して一体的に連結されている。前記弁体収納部2と弁体駆動部4の間には、弁棒6が配置されており、該弁棒6は、その下端に前記弁体8が連結されるとともに、その上端側には前記弁体駆動部4に設けたステムナット7が噛合されている。また、前記弁棒6は、前記ヨーク3部分においては、その左右一対の支柱部3A,3B間に露出状態で配設されている。
【0039】
そして、前記弁棒6は、前記弁体駆動部4に付設されたモータ5によって、図示しないウォーム及びウォームホイールを介して、前記ステムナット7を回転駆動させることで、その軸方向に昇降動して前記弁体8を開弁又は閉弁させる。
【0040】
ところで、電動弁1においては、その機能を維持し信頼性の高い作動を確保するために、定期的あるいは必要に応じて、その機能に関する診断を行うことが必要であること、及び、この電動弁1の機能に関する診断においては、例えば、駆動力伝達系の磨耗状態とか、弁体の停止位置、あるいはリミットスイッチ類の作動位置等の診断が行われるが、これらの診断項目については、前記弁棒6の軸方向の変位に関わる移動情報に基づいて診断することが可能であることは、既述の通りである。
【0041】
係る観点から、この実施形態においては、次述のように、前記弁棒6の軸方向変位に関する移動情報を取得する弁棒移動情報取得手段X1を主体とする診断装置Z1を前記電動弁1に取り付けて、該弁棒移動情報取得手段X1により取得される前記弁棒6の移動情報に基づいて電動弁1の診断を行うようにしている。
【0042】
そして、この場合、前記電動弁1への前記診断装置Z1の設置を、従来のように電動弁1の一部を開放することなく外部から容易に設置することができ、且つ前記電動弁1の設置状況下におけるスペース的な制約を受けないように、前記診断装置Z1の設置作業時及び設置後の診断時における所要スペースを狭小化すること等を考慮して、前記診断装置Z1を構成している。
以下、この実施形態に係る診断装置Z1を、図2〜図5を参照して、具体的に説明する。
【0043】
図2及び図3には、前記診断装置Z1の主体を成す弁棒移動情報取得手段X1を示している。尚、前記診断装置Z1は、前記弁棒移動情報取得手段X1の他に、該弁棒移動情報取得手段X1からの情報を受けて演算等によって各種の診断項目の診断を行う診断手段としての処理ユニットを備えて構成されるが、ここでは前記処理ユニットの図示を省略し、前記弁棒移動情報取得手段X1のみ図示している。
【0044】
前記弁棒移動情報取得手段X1は、前記ヨーク3に取付けられて、電動弁診断の基礎情報となる前記弁棒6の移動情報、即ち、開弁側又は閉弁側への移動方向と移動量を取得するもので、次述のローラ16と検出器としてのロータリエンコーダ15を備えて構成される。
前記ローラ16は、前記弁棒6の外表面に接触し、該弁棒6の軸方向変位に追従して回転するものであって、ゴム素材に砥粒等の粒状物を混入させた混合材を用いて所定径のローラ状に成形され、適度の弾性変形性と耐磨耗性及び摩擦係数をもち、ロータリエンコーダ15の入力軸15aに取付けられている。
【0045】
また、前記ロータリエンコーダ15は、前記ローラ16と一体に回転する前記入力軸15aの回転に基づいて、その回転方向と回転量(回転角)を取得し、これら取得情報に対応する信号を処理ユニットに出力するもので、支持ブラケット14に取付けられている。また、この支持ブラケット14は、クランプ12によって前記ヨーク3の一方の支柱部3Aに固定された固定ブラッケット11に対して、クランプ13により回動位置調整可能に連結されており、該支持ブラケット14の回動位置の調整によって、前記ローラ16は前記ヨーク3の左右一対の支柱部3A,3B間に露出している前記弁棒6の外周面に所定の押圧力で当接される。
【0046】
この状態で、前記弁棒6が上昇(開弁作動方向)または降下(閉弁作動方向)すると、該弁棒6の外表面に当接した前記ローラ16が該外表面との間に作用する摩擦力によって回転し、このローラ16の回転が前記入力軸15aの回転として前記ロータリエンコーダ15に入力される。そして、前記ローラ16の回転方向から前記弁棒6の移動方向が直接的に取得される一方、前記ローラ16の回転角と前記ローラ16の径寸法から前記弁棒6の移動量が、さらに前記ローラ16の回転角と回転時間から前記弁棒6の移動速度が、それぞれ演算にて取得される。これら各取得情報が前記処理ユニットに入力され、これに基づいて電動弁1の各種の診断が行われる。尚、この処理ユニットにおける電動弁1の診断手法等については、後に纏めて説明する。
【0047】
ところで、この実施形態の診断装置Z1による診断の精度は、該診断装置Z1を構成する前記弁棒移動情報取得手段X1の情報取得精度に依存するところが大きく、さらにこの弁棒移動情報取得手段X1の情報取得精度は前記弁棒6の動きに対する前記ローラ16の追従性に依存するところが大きい。このため、この実施形態の弁棒移動情報取得手段X1では、上述のように、前記ローラ16を適度の弾性変形性と耐磨耗性及び摩擦係数を具備するものとするとともに、該ローラ16の前記弁棒6に対する押圧力を調整可能としたものである。
【0048】
即ち、図4及び図5に示すように、前記ローラ16は、前記弁棒6の軸方向変位に伴って、該弁棒6の平滑面で構成される軸部6Aと凹凸面で構成されるネジ部6Bの双方に接触することになる。この場合、前記ローラ16を上述のように構成することで、該ローラ16が弁棒6の軸部6Aに接触するときは、図4に示すように、該ローラ16が弾性的な潰れ変形を生じ比較的大きな接触面積と面圧をもつことで、該ローラ16は前記弁棒6との間にスリップを生じることなく該弁棒6の動きに追従して回転することになる。また、前記ローラ16が弁棒6のネジ部6Bに接触するときは、図5に示すように、該ローラ16が弾性的な潰れ変形を生じねじ山間に進入して係止作用をもつことで、該ローラ16は前記弁棒6との間にスリップを生じることなく該弁棒6の動きに追従して回転することになる。
【0049】
このように、前記弁棒移動情報取得手段X1として前記ローラ16を用いることで、前記ローラ16が前記弁棒6の軸部6Aとネジ部6Bの何れに接触する場合においても、これら両者の表面状態の相違に拘わらず、前記ローラ16は常に弁棒6の動きに追従して回転することになる。この結果、前記弁棒移動情報取得手段X1の情報取得精度が高水準に維持され、延いては前記診断装置Z1の診断精度が向上するものである。
【0050】
ここで、万一の事態として、前記ローラ16が前記弁棒6の軸部6Aに接触している間においてスリップが生じた場合を想定し、その場合における補正手法を、図20を参照して説明する。
【0051】
図20において、実線は、電動弁の閉作動の開始(点イ 時間t1)後、その作動途中において前記ローラ16にスリップが発生(点ロ 時間t2)し、時間の経過に拘わらずバルブリフトが変化しない領域(点ロ〜点ハ 時間c)が生じた後、スリップの収束によって再び閉作動を開始(点ハ 時間t3)し、最終的に、シートタッチによりバルブリフトの変化が停止(点ニ 時間t4)したときのバルブリフト線図を示している。
【0052】
この場合、バルブリフトの変化率「b/a」はその作動の全域を通して一定と見做すことができる。また、シートタッチ時点における実際のバルブリフト「h1」と計測上のバルブリフト「h2」の間には差分「d」が存在する。
【0053】
そこで、スリップ発生前におけるバルブリフト線図(点イ〜点ロの線分)をそのまま延長するとともに、差分「d」を「d=c×(b/a)」から演算により求め、前記延長線と前記バルブリフト「h1」の線分との交点を「点ホ」とし、「点ロ〜点ホ」の線分を補正後のバルブリフト線図とするものである。
【0054】
係る補正によって、例え前記ローラ16にスリップが生じたとしても、前記弁棒移動情報取得手段X1により取得される弁棒6の移動情報はスリップの影響が排除された信頼性の高い情報とされる。
【0055】
「第2の実施形態」
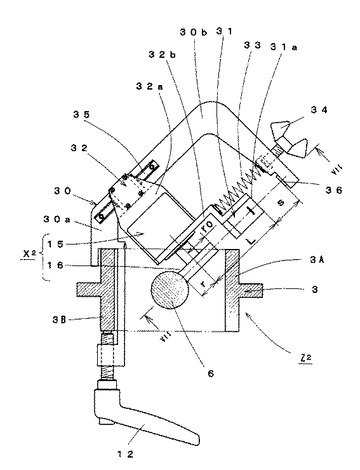
図6及び図7には、本願発明の第2の実施の形態に係る診断装置Z2を構成する弁棒移動情報取得手段X2を電動弁1のヨーク3部分に設置した状態を示している。
【0056】
この弁棒移動情報取得手段X2は、前記第1の実施形態に係る診断装置Z1の弁棒移動情報取得手段X1と同様に、弁棒6の外部露出部分の外表面に接触して該弁棒の移動に追従して回転するローラ16と、該ローラ16の回転に伴う情報を検出する検出器としてのロータリエンコーダ15を備えて構成される。しかし、前記第1の実施形態の弁棒移動情報取得手段X1においては、前記ローラ16が前記弁棒6の外表面に押し付けられることによる弾性変形量を前記ロータリエンコーダ15の検出値に反映させていなかったが、次述のように、この実施形態の弁棒移動情報取得手段X2では、前記ローラ16の弾性変形量を前記ロータリエンコーダ15の検出値に反映させることで、より一層精度の高い弁棒6の移動情報を取得するようにしている。
【0057】
即ち、前記ローラ16は、押圧力がかかっていない自然状態で半径「r0」であっても、これが前記弁棒6の外表面に押圧されると弾性変形して実質的な半径は弾性変形量だけ減少して半径「r」となる。一方、弁棒の移動量は、前記ロータリエンコーダ15の検出値(回転量)と前記ローラ16の回転半径との積として求められる。従って、このローラ16の回転半径を、自然状態での前記半径「r0」として計算したときと、弾性変形した後の前記半径「r」として計算したときでは、当然に異なった数値となる。この場合、前記半径「r0」と前記半径「r」の差分が小さく電動弁の診断上においてこれを無視できる場合(それほど厳密な診断でない場合)には問題ないが、この差分が電動弁の診断上において看過できないほどの影響があるような診断である場合には、これらの半径「r0」と半径「r」の差分の影響を前記ロータリエンコーダ15の検出値に反映させることが必要となる。これを実現するのがこの実施形態の弁棒移動情報取得手段X2であって、その具体的な構成は以下の通りである。
【0058】
この実施形態の弁棒移動情報取得手段X2では、前記ヨーク3に取付けられる固定ブラケット30の固定部30aにアーム部30bを一体的に延設し、このアーム部30bにリニアガイド35を介して可動ブラケット32を取付けている。そして、この可動ブラケット32の基部32aに前記ロータリエンコーダ15を取付けるとともに、該ロータリエンコーダ15の入力軸15aに取付けられた前記ローラ16を前記弁棒6の外表面に押圧接触させるようにしている。さらに、前記可動ブラケット32の延設部32bには、レーザセンサ31を取付けるとともに、該レーザセンサ31のレーザ照射部31aを前記アーム部30bの端部に設定した測定点36に対向させている。
【0059】
また、前記可動ブラケット32は、前記固定部30aのアーム部30bとの間に縮装したスプリング33のバネ力によって、常時前記ローラ16を前記弁棒6の外表面に押圧する方向に付勢されている。このスプリング33の付勢力は調整ネジ34によって増減調整ができるようになっている。
【0060】
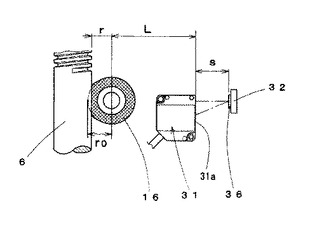
ここで、前記ローラ16の厚さ方向中心と前記レーザセンサ31のレーザ照射部31aと前記測定点36の中心は、一直線上に位置している。そして、前記ローラ16の軸芯位置と前記レーザセンサ31のレーザ照射部31aの前記直線上の間隔「L」は一定に固定されているが、前記ローラ16の軸芯と前記弁棒6の外表面上の前記ローラ16の接触点との間隔「r」(即ち、前記ローラ16の弾性変形後における実質的な回転半径)と、前記レーザセンサ31のレーザ照射部31aと前記測定点36との間隔「s」は、前記ローラ16の弾性変形に対応して増減変化する。そして、この間隔「r」と間隔「s」の間には、「r+s=一定」という関係が成立し、前記ローラ16の弾性変形量が大きくなれば間隔「r」が減少すると同時に、間隔「s」は間隔「r」の減少分だけ増加することになる。
【0061】
従って、例えば、初期設定として、前記ローラ16を前記弁棒6の外表面に、弾性変形が生じない範囲で接触させたとき(即ち、前記ローラ16が半径「r0」で接触しているとき)、前記レーザセンサ31のレーザ照射部31aと前記測定点36との間隔「s0」を計測し、これら「r0」と「s0」をそれぞれ初期値として保有する。すると、これら二つの初期値「r0」、「s0」と、前記間隔「r」及び間隔「s」の間には、
「s+r=r0+s0」
「r=(s×s0)/r0=s×(s0/r0)」、
という関係が成立する。ここで、(s0/r0)は定数と考えることができるので、前記間隔「r」は、前記レーザセンサ31によって取得される前記間隔「s」から得ることができる。
【0062】
この結果、前記ロータリエンコーダ15の検出値に基づいて前記弁棒6の移動量を算出する際に、前記ローラ16の回転半径を前記初期値「r0」ではなく、前記間隔「s」を考慮して得られる前記間隔「r」として算出する(即ち、前記ローラ16の回転半径を前記初期値「r0」から前記間隔「r」に補正する)ことで、前記ローラ16の弾性変形量に影響されることなく、前記弁棒6の移動量を正確に算出することができることになり、延いては、これらの弁棒6の移動情報に基づく電動弁1の機能に関する診断の信頼性が確保されることになる。
【0063】
尚、この実施形態では、前記固定ブラケット30に対して前記リニアガイド35により移動可能に支持された前記可動ブラケット32と、該可動ブラケット32に取付けられた前記レーザセンサ31で特許請求の範囲中の補正手段が構成される。
【0064】
「第3の実施形態」
図8には、本願発明の第3の実施形態に係る診断装置Z3を構成する弁棒移動情報取得手段X3を、電動弁1のヨーク3部分に固定された固定ブラケット11と該固定ブラケット11に位置調整可能に連結された支持ブラケット14を介して、前記ヨーク3部分に設置した状態を示しており、同図において符号12及び13は、前記固定ブラケット11と前記支持ブラケット14にそれぞれ設けられたクランプである。
【0065】
前記弁棒移動情報取得手段X3は、電動弁診断の基礎情報となる前記弁棒6の移動情報を取得するもので、次述のローラ16と、検出器としての測定用ローラ38と磁気ヘッド39を備えて構成される。
【0066】
前記ローラ16は、前記弁棒6の外表面に接触し、該弁棒6の軸方向変位に追従して回転するものであって、ゴム素材に砥粒等の粒状物を混入させた混合材を用いて所定径のローラ状に成形され、適度の弾性変形性と耐磨耗性及び摩擦係数を兼備している。そして、このローラ16は、前記支持ブラケット14に回転自在に支承された回転軸37の一端側に固定されている。また、前記ローラ16は、前記支持ブラケット14の位置調整によって前記弁棒6の外表面に対して所定の押圧力で押圧接触され、該弁棒6の軸方向への移動に追従して回転される。
【0067】
前記測定用ローラ38は、所定径を有し、前記回転軸37の他端側に固定され、該回転軸37を介して前記ローラ16と一体的に回転される。この測定用ローラ38は、その外周面に所定の情報が磁気信号として記録された磁気テープ43が、その全周に亘って巻回され且つ固定されている。そして、この磁気テープ43に記録された情報は、前記磁気ヘッド39によって読み取られる。尚、この磁気ヘッド39は、前記測定用ローラ38の外周面に対してその径方向外方からこれに近接するように前記支持ブラケット14に取り付けられている。
【0068】
そして、この弁棒移動情報取得手段X3では、前記弁棒6が軸方向へ移動するとき、これに追従して前記ローラ16が回転し、このローラ16の回転が前記回転軸37を介して前記測定用ローラ38に伝達される。この測定用ローラ38が回転すると、これに設けられた前記磁気テープ43の情報が前記磁気ヘッド39によって読み取られ、該磁気ヘッド39から前記弁棒6の移動に関する情報が処理ユニット側へ出力される。
【0069】
このように、この弁棒移動情報取得手段X3では、前記弁棒6の移動に関する情報を前記磁気ヘッド39によって直接的に取得すものであり、且つ前記磁気ヘッド39がコンパクトであることから、該弁棒移動情報取得手段X3そのものの小型化が促進され、延いては該弁棒移動情報取得手段X3を備えて構成される前記診断装置Z3の小型化及び取扱性が向上することになる。
【0070】
尚、この実施形態の弁棒移動情報取得手段X3においても、前記第2の実施形態の弁棒移動情報取得手段X2と同様に、前記ローラ16の弾性変形量を前記磁気ヘッド39の検出値に反映させることで、より一層精度の高い弁棒6の移動情報を取得できることは勿論である。
【0071】
「第4の実施形態」
図9には、本願発明の第4の実施形態に係る診断装置Z4を構成する弁棒移動情報取得手段X4を、電動弁1のヨーク3部分に固定された固定ブラケット11と該固定ブラケット11に位置調整可能に連結された支持ブラケット14を介して、前記ヨーク3部分に設置した状態を示しており、同図において符号12及び13は、前記固定ブラケット11と前記支持ブラケット14にそれぞれ設けられたクランプである。
【0072】
前記弁棒移動情報取得手段X4は、電動弁診断の基礎情報となる前記弁棒6の移動情報を取得するもので、次述のローラ16と、検出器としての測定用ローラ40と光学式センサ41を備えて構成される。
【0073】
前記ローラ16は、前記弁棒6の外表面に接触し、該弁棒6の軸方向変位に追従して回転するものであって、ゴム素材に砥粒等の粒状物を混入させた混合材を用いて所定径のローラ状に成形され、適度の弾性変形性と耐磨耗性及び摩擦係数をもち、前記支持ブラケット14に回転自在に支承された回転軸37の一端側に固定されている。このローラ16は、前記支持ブラケット14の位置調整によって前記弁棒6の外表面に対して所定の押圧力で押圧接触され、該弁棒6の軸方向への移動に伴って回転される。
【0074】
前記測定用ローラ40は、所定径を有し、前記回転軸37の他端側に固定され、該回転軸37を介して前記ローラ16と一体的に回転される。この測定用ローラ40は、その外周面にその軸方向へ延びる多数の溝を周方向に所定間隔で形成している。尚、この溝は、次述する光学式センサ41による検出を容易とするためのものであり、従って、他の実施形態においては前記溝の形成に代えて、例えば、所定間隔で多数の直線を印刷等したテープを前記測定用ローラ40の外周面に貼設するようにしても良い。
【0075】
前記光学式センサ41は、例えば、画像処理用のCCDカメラで構成され、前記測定用ローラ40の外周面にその径方向外方から所定間隔をもって対向するようにして、前記支持ブラケット14に取付けられている。そして、この光学式センサ41は、前記測定用ローラ40の回転に伴うその外周面の模様の変化を撮像して画像データとして取り込み、これを処理ユニットに出力する。処理ユニットでは、光学式センサ41から入力された画像データを画像処理してその位置を特定して認識し、その特定位置がどの方向へ、どれぐらい移動したか(即ち、弁棒6の移動方向及び移動量)、等の情報を取得する。
【0076】
この場合、撮像の画像処理という手法を用いることから、撮像の変化が明確に判別できる場合、例えば、弁棒の停止状態からの移動開始時点とか、逆に、弁棒の移動状態からの停止時点の検出を高精度に行えるので、弁棒の移動距離、即ち、バルブストロークに関する情報の取得には特に有利である。
【0077】
また、このような画像処理方式のセンサ以外の光学式センサ41としては、例えば、光源から前記弁棒6の表面に光を照射し、該表面で反射した反射光を受けてこれを光電変換して位置信号として出力するとともに、この出力値に基づいてその座標上の位置を特定して認識し、該認識位置の変化から、前記弁棒6がどの方向へ、どれぐらい移動したか、を検出するもの等、種々のものが採用できる。
【0078】
この光学式センサ41を用いた弁棒移動情報取得手段X4は、該光学式センサ41が直接弁棒6に接触しない非接触形であることから、電動弁1の運転中でもその作動に何等の支障を及ぼすことなく計測でき、そのためる、診断時期が制約されないという、特有の利点がある。
【0079】
尚、この実施形態の弁棒移動情報取得手段X3においても、前記第2の実施形態の弁棒移動情報取得手段X2と同様に、前記ローラ16の弾性変形量を前記磁気ヘッド39の検出値に反映させることで、より一層精度の高い弁棒6の移動情報を取得できることは勿論である。
【0080】
「第5の実施形態」
図10及び図11には、本願発明の第5の実施形態に係る診断装置Z5を前記電動弁1のヨーク3部分に取付けた状態を示している。この診断装置Z5は、弁棒移動情報取得手段X5を主体とするものであって、該弁棒移動情報取得手段X5によって、前記弁棒6のうち、前記ヨーク3の左右一対の支柱部3A,3B間に露出している部分においてその動きを計測し、電動弁診断の基礎情報となる前記弁棒6の開弁側又は閉弁側への移動方向と移動量を取得する。
【0081】
前記弁棒移動情報取得手段X5は、次述するクローラ26と検出器としてのロータリエンコーダ25を備えて構成される。前記クローラ26は、所定間隔をもって一列に配置された3個の走行ローラ28と該各走行ローラ28間にそれぞれ前後して2個ずつ配置された小径の押圧ローラ29を備えるとともに、これら各走行ローラ28及び押圧ローラ29を取り囲むようにして環状のベルト27を掛け回して構成される。
【0082】
尚、前記ベルト27の内周面にはその走行方向に所定間隔で突条(図示省略)が形成される一方、前記走行ローラ28の外周面には、前記ベルト27の突条に噛合する噛合歯が周方向に所定間隔で形成されており、これら突条と噛合歯を噛合させることで、前記ベルト27の走行に追従して前記走行ローラ28が回転される。前記押圧ローラ29は、前記ベルト27をバックアップしてその弛みを防止するものであって、該ベルト27との一体性は要求されないため、噛合歯は設けられていない。
【0083】
前記クローラ26の前記各走行ローラ28のうち、一端側に位置する走行ローラ28には、ロータリエンコーダ25が連結されている。また、このクローラ26と前記ロータリエンコーダ25は、一体的に支持ブラッケット24に支持されており、該走行ローラ28の回転が前記ロータリエンコーダ25に入力されるようになっている。
【0084】
また、前記ヨーク3の支柱部3Aには、クランプ22によって固定ブラッケット21が取付けられており、さらに、この固定ブラッケット21にはクランプ23によって前記支持ブラッケット24が連結されている。
【0085】
そして、前記クローラ26は、前記ベルト27の一側を前記弁棒6の表面に押し当てた状態で前記ヨーク3側に取付けられるが、その場合、前記クランプ23の締め込み量の調節によって、前記クローラ26の前記弁棒6に対する押圧力が調整されるようになっている。
【0086】
前記弁棒移動情報取得手段X5を前記ヨーク3側に取付けた状態において、前記弁棒6が上昇(開弁作動方向)または降下(閉弁作動方向)すると、該弁棒6の外表面に当接した前記クローラ26のベルト27が前記各走行ローラ28間で走行し、このベルト27の走行に追従して該各走行ローラ28が回転される。この走行ローラ28の回転が前記ロータリエンコーダ25に入力されることで、前記弁棒6の移動方向が直接的に取得される一方、前記走行ローラ28の回転角と径寸法から前記弁棒6の移動量が、前記走行ローラ28の回転角と回転時間から前記弁棒6の移動速度が、それぞれ演算にて取得される。そして、これら取得情報が前記処理ユニットに入力され、これに基づいて電動弁1の各種の診断が行われる。
【0087】
ところで、この実施形態の診断装置Z5においても、前記第1の状態の診断装置Z1の場合と同様に、該診断装置Z5による診断の精度は、これを構成する前記弁棒移動情報取得手段X2の情報取得精度に依存するところが大きく、さらにこの弁棒移動情報取得手段X2の情報取得精度は前記弁棒6の動きに対する前記クローラ26の追従性に依存するところが大きい。
【0088】
この場合、この実施形態の弁棒移動情報取得手段X5では、前記クローラ26の構造的な理由から、前記ベルト27の厚さ方向における弾性変形性が低く、例えば、該ベルト27が前記弁棒6のネジ部6Bに接したときでも、該ネジ部6Bのネジ山間には殆ど進入せず該ネジ部6Bとの間の係止作用は殆ど望めない。このため、この実施形態の弁棒移動情報取得手段X5では、前記クローラ26の長さ、即ち、前記ベルト27が前記弁棒6の表面に接する長さを比較的長くして前記弁棒6側との接触面積の拡大を図るとともに、該弁棒6側への押圧力を大きくすることで、前記弁棒6の表面との間に作用する摩擦力を高め、これによって前記弁棒6の移動に対する前記ベルト27の走行追従性を確保するようにしている。この結果、前記弁棒移動情報取得手段X5の前記弁棒6からの情報取得精度が良好に維持され、延いては前記診断装置Z2の診断精度が良好に維持される。
【0089】
そして、この実施形態のように前記クローラ26によって前記弁棒移動情報取得手段X5を構成した場合の最大の利点は、前記弁棒6の表面が前記ネジ部6のような凹凸面であっても、なんら支障なく、前記軸部6Aのような平滑面である場合と同様に、精度の高い情報取得が可能な点である。
【0090】
「第6の実施形態」
図12及び図13には、本願発明の第6の実施形態に係る診断装置Z6を前記電動弁1のヨーク3部分に取付けた状態を示している。この診断装置Z6は、前記第5の実施形態に係る診断装置Z5と基本構成を同じにするものであって、該診断装置Z5と異なる点は、前記クローラ26の検知信号の出力構造である。即ち、第5の実施形態に係る診断装置Z5においては、前記クローラ26の前記各走行ローラ28のうち、一端側に位置する走行ローラ28に前記ロータリエンコーダ25を連結し、該走行ローラ28の回転を該ロータリエンコーダ25に入力するようにしていたが、この実施形態の診断装置Z6では、図12及び図13に示すように、前記クローラ26に設けられる三個の走行ローラ28とは別に、前記ベルト27に噛合して該ベルト27の走行に追従して回転する検知ローラ42を設け、検知ローラ42の回転を前記ロータリエンコーダ25に入力するように構成している。
【0091】
このような構成とした場合には、前記検知ローラ42の回転は、前記ベルト27の走行状態のみに支配され、該ベルト27が接触する前記弁棒6の表面状況(例えば、これが平滑面であるか、凹凸面であるか等の状況)には何等の影響も受けず、該ベルト27の走行状態を忠実に反映したものとなり、より高精度で信頼性の高い情報取得が可能となる。尚、図12及び図13の各構成部材には、図10及び図11において各構成部材に付したと同じ符号を付すことで、ここでの説明を省略する。
【0092】
「第7の実施形態」
図14には、本願発明の第7の実施形態に係る診断装置Z7を前記電動弁1のヨーク3部分に取付けた状態を示している。この診断装置Z7は、弁棒移動情報取得手段X7を主体とするものであって、該弁棒移動情報取得手段X7によって、前記弁棒6のうち、前記ヨーク3の左右一対の支柱部3A,3B間に露出している部分においてその動きを計測し、電動弁診断の基礎情報となる前記弁棒6の作動状態、即ち、開弁側又は閉弁側への移動方向と移動量を取得する。
【0093】
前記弁棒移動情報取得手段X7は、前記ヨーク3の支柱部3Aにクランプ32によって固定した固定ブラッケット31に支持ブラッケット34を介して取り付けられた光学式センサ35で構成される。この場合、前記支持ブラッケット34を調整ネジ33によって前記固定ブラッケット31に連結し、前記光学式センサ35の前記弁棒6に対する設置位置を前記調整ネジ33のねじ込み量で調整できるようにしている。
【0094】
ここで、前記光学式センサ35は、前記弁棒6の前記ヨーク3における露出部位の変位を光学的に取得し、この取得情報基づいて前記弁棒の移動方向と移動量を取得するものであって、この実施形態では画像処理用のCCDカメラで構成している。このCCDカメラで構成された光学式センサ35においては、撮影された前記弁棒6の表面の模様等の撮像を画像データとして処理ユニットへ出力する。処理ユニットでは、光学式センサ35から入力された画像データを画像処理してその位置を特定して認識し、その特定位置がどの方向へ、どれぐらい移動したか、等の情報を取得する。
【0095】
この場合、撮像の画像処理という手法を用いることから、撮像の変化が明確に判別できる場合、例えば、弁棒の停止状態からの移動開始時点とか、逆に、弁棒の移動状態からの停止時点の検出は高精度に行えるので、弁棒の移動距離、即ち、バルブストロークに関する情報の取得には有利である。
【0096】
また、このような画像処理方式のセンサ以外の光学式センサ35としては、例えば、光源から前記弁棒6の表面に光を照射し、該表面で反射した反射光を受けてこれを光電変換して位置信号として出力するとともに、この出力値に基づいてその座標上に位置を特定して認識し、該認識位置の変化から前記弁棒6がどの方向へ、どれぐらい移動したか、を検出するもの等、種々のものが採用できる。
【0097】
この光学式センサ35を用いた弁棒移動情報取得手段X7は、該光学式センサ35が直接弁棒6に接触しない非接触形であることから、電動弁1の運転中でもその作動に何等の支障を及ぼすことなく計測できる、延いては診断時期が制約されないという、特有の利点がある。
【0098】
また、この実施形態の弁棒移動情報取得手段X7は、前記弁棒6の軸方向への移動状態を光学式センサ35によって非接触で取得するものであって、その取得精度は、弁棒6と光学式センサ35の対向間隔の変化によって影響を受けることはなく、例えば、前記弁棒6が曲がり変形を生じており、その軸方向移動に伴って該弁棒6弁棒6と光学式センサ35の対向間隔の変化するような場合であっても、該弁棒6の移動方向と移動量を高い精度で取得することができる。
【0099】
「各実施形態の診断装置に共通する作用効果」
ここで、前記各実施形態の診断装置Z1〜Z7に共通する作用効果について説明すると以下の通りである。
【0100】
前記各実施形態に係る各診断装置Z1〜Z7は、それぞれ前記弁棒移動情報取得手段X1〜X7を主体として構成されるものであるが、これら各弁棒移動情報取得手段X1〜X7が、前記電動弁1の前記ヨーク3部分に設置され、前記弁棒6のうち、前記ヨーク3部分において外部へ露出した部分の動きからその軸方向変位に関する移動情報を取得するものであることから、例えば、従来の測定棒式あるいはワイヤ式の取得手段のように、電動弁1への設置に際して該電動弁1の一部を開放して行う必要がない。
【0101】
この結果、電動弁1の一部を開放する場合のように、診断装置Z1〜Z7の設置作業に際して電動弁1に関する専門技術を必要とせず、且つ開放作業が無い分だけ設置に伴う作業量も少なく、これらの相乗効果として、設置作業の簡易化及び迅速化が促進される。
【0102】
また、電動弁の一部を開放することなく該電動弁の機能を維持したまま、弁棒の軸方向変位に関する移動情報を取得することができるので、移動情報の取得作業を、電動弁が備えられた配管系の稼動状況に左右されることなく、必要に応じて任意に行うことができ、延いては、電動弁の診断における時期的な要求に柔軟に対応できる。
【0103】
さらに、前記弁棒6の移動情報を、該弁棒6の前記ヨーク3部分における露出部位での計測により取得するものであることから、例えば、従来の測定棒式の取得手段のように電動弁1の内部に充填されたグリースの粘性抵抗によって測定精度が左右されるということがなく、精度の高い移動情報を簡易に取得することができる。
【0104】
また、前記各診断装置Z1〜Z7を構成する前記各弁棒移動情報取得手段X1〜X7を、前記弁棒6の一部が露出する前記ヨークヨーク3部分に取付けるように構成しているので、前記電動弁1に前記弁棒移動情報取得手段X1〜X7を設置した状態においても、該弁棒移動情報取得手段X1〜X7は前記電動弁1の高さ範囲内に納められ、例えば、従来の測定棒式取得手段のように測定棒が前記電動弁1の上方側に突出するようなことが無いことから、前記電動弁の設置状態においてその上方に十分な作業スペースを確保できないような場合であっても、前記各弁棒移動情報取得手段X1〜X7(即ち、前記各診断装置Z1〜Z7)を前記電動弁に対して容易に設置することができ、それだけ前記各診断装置Z1〜Z7の適用可能範囲が拡大され、延いては該診断装置Z1〜Z7の汎用性が向上することになる。
【0105】
「電動弁1の診断内容等」
続いて、前記各診断装置Z1〜Z7の何れかを用いて行われる前記電動弁1の診断内容等について説明する。
【0106】
前記弁棒6の移動情報に基づいて診断可能な項目としては、ステムナットの磨耗の診断、ロッキングナットの緩みの診断、弁体吊部の磨耗の診断、バルブストロークの診断、トルクスイッチの作動点の診断、
リミットスイッチの作動点の診断、ロータスイッチの作動点の診断、トルクバイパススイッチの作動点の診断がある。
【0107】
これらの診断項目のうち、ステムナットの磨耗の診断は本願発明がその目的の一つとするものである。ここでは、ステムナットの磨耗の診断を中心に、上記各診断項目のそれぞれを具体的に説明するが、これに先立って、これらの各診断の前提技術として、電動弁の作動に伴う各種センサの出力特性を、図19に示す特性図に基づいて説明する。
【0108】
図19は、電動弁を全閉状態から開作動させた時における、リフトセンサの出力(特性線L1)と、ヨークセンサの出力(特性線L2)と、トルクセンサの出力(特性線L3)を示している。
【0109】
ここで、開作動時における弁棒等の挙動を簡単に説明する。モータが起動されると(時間t1)、ロストモーション領域を経て、ハンマブローが発生し、ステムナット側にモータの回転力が伝達され、弁棒の圧縮状態(全閉時の締切力による圧縮)が開放され(時間t2)、ヨークの伸びが復元される(時間t3)。ヨークの伸びが復元すると、その時点からステムナットが回転するが、ステムナットと弁棒のネジ部の間のクリアランス(以下、「ステムナットクリアランス」という)が消滅するまで、弁棒は作動せず停止状態を保持する。前記ステムナットクリアランスが消滅すると(時間t4)、その時点から弁棒の引き上げ方向の作動が開始される。しかし、弁棒の作動が開始されても、弁体吊部における弁棒とのクリアランス(以下、「弁体吊部クリアランス」という)が消滅するまでは弁体は停止状態とされ、該弁体吊部クリアランスが消滅した時点(時間t5)から、弁体の開方向への作動が開始される。このような弁棒等の挙動に対応して、前記各センサ出力が変化する。
【0110】
ここで、ハンマブローの発生から弁棒作動開始までの間における弁棒6とステムナット7の噛合状態の変化を、図15〜図18に示す模式図及び図19に示す作動特性図を参照して説明する。
【0111】
ハンマブローが生じた時点(図19の時間t2)では、図15示すように、前記ヨーク3の伸びによって、前記弁棒6のネジ山6aの上面6a1が前記ステムナット7のネジ溝7aの上面7a1に当接した状態となっている。この状態は、ヨーク伸びの復元時点(時間t3)まで維持され変化しない(図16参照)。即ち、この時間t2から時間t3の間は、前記弁棒6が前記ステムナット7と一体的に動いている状態で、これら両者間には軸方向における相対変位は生じない。
【0112】
時間t3において、前記ヨーク3の伸びが復元すると、図17に示すように、前記弁棒6のねじ山6aの上面6a1は前記ステムナット7のネジ溝7aの上面7a1から離れるが、該ステムナット7のネジ溝7aと前記弁棒6のネジ山6aの間にステムナットクリアランスが存在するため、このステムナットクリアランスの分だけ前記弁棒6とステムナット7が軸方向へ相対変位するまでの間(時間t3〜時間t4の間)、前記弁棒6は移動しない。
【0113】
時間t4に達すると、図18に示すように、前記弁棒6のネジ山6aの下面6a2が前記ステムナット7のネジ溝7aの下面7a2に当接し、この時点から、前記ステムナット7の回転によって前記弁棒6が開弁方向へ作動を開始する。
【0114】
ここで、前記「リフトセンサ」は、前記弁棒6の移動情報を取得するものであって、本願発明における前記弁棒移動情報取得手段X1〜X7がこれに該当し、該記弁棒移動情報取得手段X1〜X7により取得される弁棒6の移動情報が図19における特性線L1として表れる。この特性線L1に示すように、リフトセンサの出力は、ハンマブローに伴うヨークの伸び(全閉時の締切力による伸び)の復元とともに僅かに上昇変化し、ヨークの伸びが完全に復元された時点(時間t3)に至って停止し、この停止状態はステムナットクリアランスが消滅するまで(時間t4)継続され、その後は略一定の増加率で上昇変化する。
【0115】
そして、このリフトセンサ出力には、ヨークの伸びの復元時点である「点a」(時間t3)と、弁棒の作動開始時点である「点b」(時間t4)の二点において顕著な変化点が表れるため、この二つの変化点を弁棒の移動情報として取得し、これを電動弁の機能に関する診断(例えば、ステムナットの磨耗の診断)に用いる。
【0116】
また、リフトセンサ出力は、弁棒の移動量と移動時間として表されるものであることから、取得されたリフトセンサの出力値に基づいて、弁棒6の移動速度を演算にて取得することができる。この弁棒6の移動速度は、後述のように、ステムナットの磨耗の診断において用いられる。
【0117】
前記「ヨークセンサ」は、電動弁の前記ヨーク3部分に装着されて該ヨーク3に発生する応力(即ち、電動弁の開作動時における圧縮力、閉作動時における引張力)を取得するためのものであって、該応力の変化が前記ヨークセンサ出力として表される。この、ヨークセンサ出力は、ハンマブローによって引張作用が開放されると(時間t2)、急速に低下し、ヨークの伸び復元時点(時間t3)で低下が停止され、その後、弁棒の作動が開始される時点(時間t4)まで変化せずに推移する。そして、時間t4において、弁棒の作動が開始されると、先ず低下側へ移行した後、所定の引張応力(即ち、弁棒の外周に備えられたシールパッキンの摺動抵抗による引張力)を保持したまま、弁体吊部クリアランスが消滅する時点(時間t4)まで推移し、弁体吊部クリアランスが消滅すると、弁体の引き抜きに伴って急激に低下した後、弁体移動中の負荷に対応した応力まで復帰してこれが持続される。
【0118】
そして、このヨークセンサ出力には、ヨークの伸びの復元時点である「点c」(時間t3)と、弁棒の作動開始時点である「点d」(時間t4)の二点において顕著な変化点が表れるため、この二つの変化点を弁棒の移動情報として取得し、これを電動弁の機能に関する診断(例えば、ステムナットの磨耗の診断)に用いるものである。
【0119】
この場合、リフトセンサ出力における「点a」と「点b」は、ヨークセンサ出力における「点c」と「点d」に時間的に合致する。従って、電動弁の診断に際して、リフトセンサ出力における変化点である「点a」、「点b」と、ヨークセンサ出力における変化点である「点c」、「点d」を、適宜選択して用いることができ、後述の診断例ではこれを適用している。
【0120】
一方、トルクセンサ出力は、例えば、電動弁に装備されたスプリングカートリッジ部分に取り付けられた内蔵式のトルクセンサによって取得されるものであって、ここでは前記リフトセンサ出力及びヨークセンサ出力との対比の意味で提示したものであり、電動弁の診断には用いていない。しかし、図19に示すように、このトルクセンサ出力は、ヨークの伸び復元時点以降においてはヨークセンサ出力と同様の変化を示し、ヨークセンサ出力における「点c」と「点d」に対応する「点e」と「点f」をもつことから、ヨークセンサ出力に代えて、このトルクセンサ出力を電動弁の診断に用いることは可能である。
【0121】
続いて、前記各診断項目のそれぞれについて、その具体的内容を説明する。
【0122】
「ステムナットの磨耗の診断」
ステムナットの磨耗の診断は、基本的には、現時点におけるステムナットクリアランスの大きさと、例えば、ステムナット交換直後におけるステムナットクリアランスの大きさの差分の大きさから、ステムナットの磨耗の進行状態とか、現在の磨耗の進行状態下におけるステムナットの機能の劣化状態の判断、あるいはステムナットの次回の交換時期の予測等を行うものである。
【0123】
ここで、ステムナットの磨耗の診断の基礎となる前記ステムナットクリアランスの取得は、以下のようにして行われる。即ち、ステムナットクリアランスは上述のように、図19における伸び復元時点(リフトセンサ出力における点a及びヨークセンサ出力における点cに対応する時間t3の時点)と、弁棒作動開始時点(リフトセンサ出力における点c、及びヨークセンサ出力における点dに対応する時間t4の時点)の差分「t4−t3」として表れる。また、この時間の差分としてのステムナットクリアランスは、その存在時間として観念的に求められたものであり、これを磨耗量(寸法)として定量的に求めるためには、前記時間「t4−t3」に弁棒6の移動速度をかけて演算により求めることが必要である。このような弁棒の移動情報の取得形態としては、大きく分けて以下の二つの手法がある。
【0124】
その一つの手法は、前記ヨークの伸び復元時点及び弁棒作動開始時点を、前記リフトセンサ出力又はヨークセンサ出力から取得するものとし、且つその際、これら伸び復元時点と弁棒作動開始時点の少なくとも何れか一方は前記リフトセンサ出力から取得する一方、前記弁棒の移動速度については、前記リフトセンサ出力の点b以降の領域で且つ出力値が安定した領域内において、時間と変化量の関係(即ち、前記特性線L1の傾き)として演算により求める(即ち、実測値として求める)か、例えば、設計仕様における弁棒の移動速度をそのまま用いるかを選択するものである。即ち、この手法においては、前記ヨークの伸び復元時点と弁棒作動開始時点の二つの情報の双方をヨークセンサ出力から取得するものは除外されており、また弁棒の移動速度をリフトセンサ出力に基づいて実測値として求めるもののみには限定していない。
【0125】
他の一つの手法は、前記ヨークの伸び復元時点及び弁棒作動開始時点を、共に前記ヨークセンサ出力から取得する一方、前記弁棒の移動速度は前記リフトセンサ出力に基づいて実測値として求めるものである。
【0126】
そして、ステムナットの磨耗量は、上述の如くして取得された現時点でのステムナットクリアランス量から、例えば、ステムナット交換直後(即ち、ステムナットが磨耗していないと認められる時点)におけるステムナットクリアランス量を差し引くことで求められる。この求められたステムナットの磨耗量の大きさから、ステムナットの磨耗の進行状態とか、現在の磨耗の進行状態下におけるステムナットの機能の劣化状態の判断、あるいはステムナットの次回の交換時期の予測等を行うものである。
【0127】
このステムナットの磨耗の診断においては、弁棒の移動情報を、前記二つの手法のうちの何れの手法を採用しても、得られる診断結果には殆ど差異は無く、何れにおいても高精度で信頼性の高い診断結果が得られる。
【0128】
「ロッキングナットの緩みの診断」
ロッキングナットは、ステムナットの上端側に配置されて該ステムナットの軸方向のガタツキを防止するためのものであって、その診断は、ロッキングナットが緩んでいるかどうかを判断するものである。このロッキングナットが緩むと、ステムナットに軸方向のガタツキが生じるため、このガタツキの大きさを取得し、この取得情報に基づいてロッキングナッとの緩みの有無を診断すれば良い。
【0129】
第1には、ロッキングナットが緩んでステムナットに軸方向のガタツキが生じると、正常時(ロッキングナットに緩みがない状態)に比して、ハンマブローの発生時点に遅れが生じる(所謂、ハンマブロー遅れ)。ここで、図19のリフトセンサ出力の特性線L1に示すように、ハンマブロー時点(時間t2)においては、該特性線L1が「点g」において顕著な変化を示す。従って、ハンマブローに伴う前記リフトセンサ出力の変化点である「点g」の出現時点が、正常時における出現時点に比して、許容範囲以上に遅れているかどうかを見れば、ロッキングナットの緩みの有無を判断することができる。
【0130】
第2には、ロッキングナットが緩んでステムナットに軸方向のガタツキが生じると、正常時に比して、弁棒作動開始時点に遅れが生じる(所謂、弁棒作動開始遅れ)。ここで、図19のリフトセンサ出力の特性線L1に示すように、弁棒作動開始時点(時間t4)においては、該特性線L1が「点b」において顕著な変化を示すことは既述の通りである。従って、このリフトセンサ出力の変化点である「点b」の出現時点が、正常時における出現時点に比して、許容範囲以上に遅れているかどうかを見れば、ロッキングナットの緩みの有無を判断することができる。
【0131】
尚、ここでは弁棒の移動情報を取得する前記リフトセンサの出力に基づいてロッキングナットの緩みの有無を診断する場合について説明したが、図19に示すように、ハンマブロー発生時点は、ヨークセンサ出力の特性線L2においては「点h」が、トルクセンサ出力の特性線L3においては「点i」が、それぞれ変化点として表れ、また弁棒作動開始時点は、ヨークセンサ出力の特性線L2においては「点d」が、トルクセンサ出力の特性線L3においては「点f」が、それぞれ変化点として表れることから、他の実施形態においては、ヨークセンサ出力あるいはトルクセンサ出力に基づいてロッキングナットの緩みの有無を診断することもできる。
【0132】
「弁体吊部の磨耗の診断」
弁体吊部の磨耗状態は、図19に示すように、ヨークセンサ出力に基づいて、弁棒作動開始時点(時間t4)から弁体作動開始時点(時間t5)までの時間で表される弁体吊部クリアランスを、正常時における弁体吊部クリアランスと比較することで診断できる。この場合、ヨークセンサ出力の特性線L2において弁棒作動開始時点である「点d」は、リフトセンサ出力の特性線L1において弁棒作動開始時点である「点d」と対応することから、上述のようにヨークセンサ出力のみに基づいて診断するのに代えて、ヨークセンサ出力とリフトセンサ出力の双方に基づいて診断することもできる。
【0133】
また、図19からも判るように、ヨークセンサ出力の特性線L2における「点d」及びリフトセンサ出力の特性線L1における「点d」は、ともに変化点であるものの、その変化量が小さいため、特性線上では読みづらい場合もある。このような場合には、変化量が大きい変化点であるヨークセンサ出力の特性線L2における「点c」から「点j」までの時間に弁棒の移動速度をかけて取得されるヨーク伸び復元時点からの弁棒の移動量を求め、この移動量から、上述のステムナットの磨耗量を差し引くことで弁体吊部の磨耗量を取得することもできる。従って、この場合には、前記リフトセンサ出力が必須となる。
【0134】
「バルブストロークの診断及びトルクスイッチの作動点の診断」
バルブストロークの診断とトルクスイッチの作動点の診断は、相互に関連するものである。即ち、バルブストロークの診断は、弁体の開作動あるいは閉作動においてトルクスイッチが作動した時点における弁棒位置(即ち、弁体位置)をリフトセンサによって測定して取得し、この取得位置が設計上の位置に対して許容範囲内にあるかどうかで、その適否を診断するものである。そして、トルクスイッチが作動した時点における弁棒位置が許容範囲内の適正位置でない場合には、トルクスイッチの作動点が適正でないと診断されるものでる。
【0135】
「リミットスイッチの作動点の診断」
リミットスイッチの作動点の診断は、弁体の開作動あるいは閉作動においてリミットスイッチが作動した時点における弁棒位置(即ち、弁体位置)をリフトセンサによって測定して取得し、この取得位置が設計上の位置に対して許容範囲内にあるかどうかで、その適否を診断するものである。そして、リミットスイッチが作動した時点における弁棒位置が許容範囲内の適正位置でない場合には、トルクスイッチの作動点が適正でないと診断されるものでる。
【0136】
「ロータスイッチの作動点の診断及びトルクバイパススイッチの作動点の診断」
ロータスイッチの作動点の診断及びトルクバイパススイッチの作動点の診断は相互に関連するもので、通常、トルクバイパススイッチとして、ロータスイッチが用いられている。このトルクバイパススイッチは、開作動時に最大トルクが発生する弁体引き抜き時に、トルクスイッチが作動して開作動が停止されるのを防ぐためにトルクスイッチをバイパスさせるものである。
【0137】
そして、トルクバイパススイッチが作動して弁体の開作動が停止されたときの弁棒位置(弁体位置)をリフトセンサによって測定し、そのときの弁棒位置が弁体引き抜き時点での弁棒位置よりも開側であるか否かによってトルクバイパススイッチの作動点の適否を診断し、これが適正でない場合はロータスイッチの作動点の設定が適正でないということであるため、該ロータスイッチの作動点を設定し直すものである。
【0138】
尚、以上の説明では、弁棒の移動情報に基づいて電動弁の機能に関する診断を行う場合の手法等を、電動弁の開作動時を例にとって説明したが、本願発明はこれに限定されるものではなく、電動弁の閉作動時においても適用できることは勿論である。
【図面の簡単な説明】
【0139】
【図1】本願発明の第1の実施形態に係る診断装置を備えた電動弁の全体図である。
【図2】図1のII−II矢視図である。
【図3】図2のIII−III矢視図である。
【図4】図2のIV−IV矢視図である。
【図5】図4に示した状態からの変化状態図である。
【図6】本願発明の第2の実施形態に係る診断装置を電動弁のヨーク部分に装着した状態を示す断面図である。
【図7】図6のVII−VII矢視図である。
【図8】本願発明の第3の実施形態に係る診断装置を電動弁のヨーク部分に装着した状態を示す断面図である。
【図9】本願発明の第4の実施形態に係る診断装置を電動弁のヨーク部分に装着した状態を示す断面図である。
【図10】本願発明の第5の実施形態に係る診断装置を電動弁のヨーク部分に装着した状態を示す断面図である。
【図11】図10のXI−XI矢視図である。
【図12】本願発明の第6の実施形態に係る診断装置を電動弁のヨーク部分に装着した状態を示す断面図である。
【図13】図12のXIII−XIII矢視図である。
【図14】本願発明の第7の実施形態に係る診断装置を電動弁のヨーク部分に装着した状態を示す断面図である。
【図15】弁棒とステムナットの第1の相対位置関係の説明図である。
【図16】弁棒とステムナットの第2の相対位置関係の説明図である。
【図17】弁棒とステムナットの第3の相対位置関係の説明図である。
【図18】弁棒とステムナットの第4の相対位置関係の説明図である。
【図19】電動弁の弁棒のリフト特性グラフである。
【図20】電動弁の閉作動時におけるスリップ発生時のバルブリフト特性図である。
【図21】従来の電動弁における弁棒位置の検出状態説明図である。
【符号の説明】
【0140】
1 電動弁
2 弁体収納部
3 ヨーク
4 弁体駆動部
5 モータ
6 弁棒
7 ステムナット
8 弁体
11 固定ブラッケット
12 クランプ
13 クランプ
14 支持ブラケット
15 ロータリエンコーダ
16 ローラ
21 固定ブラッケット
22 クランプ
23 クランプ
24 支持ブラッケット
25 ロータリエンコーダ
26 クローラ
27 ベルト
28 走行ローラ
29 押圧ローラ
30 固定ブラッケット
31 レーザセンサ
32 可動ブラッケット
33 スプリング
34 調整ネジ
35 リニアガイド
36 測定点
37 回転軸
38 測定用ローラ
39 磁気ヘッド
40 測定用ローラ
41 光学式センサ
42 検出用ローラ
43 磁気テープ
X1 弁棒移動情報取得手段
X2 弁棒移動情報取得手段
X3 弁棒移動情報取得手段
X4 弁棒移動情報取得手段
X5 弁棒移動情報取得手段
X6 弁棒移動情報取得手段
X7 弁棒移動情報取得手段
Z1 診断装置
Z2 診断装置
Z3 診断装置
Z4 診断装置
Z5 診断装置
Z6 診断装置
Z7 診断装置
【特許請求の範囲】
【請求項1】
弁棒に連結された弁体が開閉動可能に収納された弁体収納部と、回転駆動力が付与されたウォームの回転駆動力を利用して前記弁棒に螺合するステムナットを回転させることで前記弁棒を昇降駆動して前記弁体を開閉する弁体駆動部と、前記弁体収納部と前記弁体駆動部を連結するヨークとを備えてなる電動弁の機能に関する診断を行う診断装置であって、
前記弁棒の外部露出部位に対応するように電動弁の外表面部分に設けられて該外部露出部位での計測により前記弁棒の移動に関する情報を取得する弁棒移動情報取得手段と、該弁棒移動情報取得手段により取得された移動情報に基づいて前記電動弁の機能に関する診断を行う診断手段を備えたことを特徴とする電動弁の診断装置。
【請求項2】
請求項1において、
前記弁棒移動情報取得手段が、前記弁棒の外部露出部位の表面に接触状態で、又は非接触状態での計測により前記弁棒の移動情報を取得する構成であることを特徴とする電動弁の診断装置。
【請求項3】
請求項2において、
前記弁棒移動情報取得手段が、前記弁棒の外部露出部位の表面に接触して該弁棒の軸方向変位に追従して回転するローラと、該ローラの回転方向と回転量を検出する検出器を備え、該検出器により検出された回転方向と回転量に基づいて前記弁棒の移動情報を取得する構成であって、前記ローラの回転半径と前記回転量に基づいて前記弁棒の移動量を算出するに際して前記ローラの回転半径を該ローラの撓み変形量に対応して補正する補正手段を備えたことを特徴とする電動弁の診断装置。
【請求項4】
弁棒に連結された弁体が開閉動可能に収納された弁体収納部と、回転駆動力が付与されたウォームの回転駆動力を利用して前記弁棒に螺合するステムナットを回転させることで前記弁棒を昇降駆動して前記弁体を開閉する弁体駆動部と、前記弁体収納部と前記弁体駆動部を連結するヨークとを備えてなる電動弁の機能に関する診断方法であって、
前記弁棒の外部露出部位において該弁棒の移動に関する情報を取得し、該取得された移動情報に基づいて電動弁の機能に関する診断を行うことを特徴とする電動弁の診断方法。
【請求項5】
請求項4において、
前記ヨークの伸び又は縮みが復元した復元時点と、前記弁棒が実際に作動を開始する作動開始時点の少なくとも何れか一方を、前記弁棒の移動情報に基づいて取得し、
前記ヨークの復元時点と前記弁棒の作動開始時点に基づいて前記弁棒のネジ部と前記ステムナットの間のクリアランスを求め、該クリアランスの大きさから前記ステムナットの磨耗状態を診断することを特徴とする電動弁の診断方法。
【請求項6】
請求項4において、
前記ヨークの伸び又は縮みの復元時点を、前記弁棒の移動情報、又は前記ヨークに発生する応力に関する情報に基づいて取得することを特徴とする電動弁の診断方法。
【請求項7】
請求項4において、
前記弁棒の作動開始時点を、前記弁棒の移動情報、又は前記ヨークに発生する応力に関する情報に基づいて取得することを特徴とする電動弁の診断方法。
【請求項8】
請求項4において、
前記ヨークの伸び又は縮みが復元した復元時点と、前記弁棒が実際に作動を開始する作動開始時点を、前記ヨークに発生する応力に関する情報に基づいて取得するとともに、前記弁棒の移動速度を前記弁棒の移動情報に基づいて取得し、
これらの取得情報に基づいて前記弁棒のネジ部と前記ステムナットの間のクリアランスを求め、該クリアランスの大きさから前記ステムナットの磨耗状態を診断することを特徴とする電動弁の診断方法。
【請求項1】
弁棒に連結された弁体が開閉動可能に収納された弁体収納部と、回転駆動力が付与されたウォームの回転駆動力を利用して前記弁棒に螺合するステムナットを回転させることで前記弁棒を昇降駆動して前記弁体を開閉する弁体駆動部と、前記弁体収納部と前記弁体駆動部を連結するヨークとを備えてなる電動弁の機能に関する診断を行う診断装置であって、
前記弁棒の外部露出部位に対応するように電動弁の外表面部分に設けられて該外部露出部位での計測により前記弁棒の移動に関する情報を取得する弁棒移動情報取得手段と、該弁棒移動情報取得手段により取得された移動情報に基づいて前記電動弁の機能に関する診断を行う診断手段を備えたことを特徴とする電動弁の診断装置。
【請求項2】
請求項1において、
前記弁棒移動情報取得手段が、前記弁棒の外部露出部位の表面に接触状態で、又は非接触状態での計測により前記弁棒の移動情報を取得する構成であることを特徴とする電動弁の診断装置。
【請求項3】
請求項2において、
前記弁棒移動情報取得手段が、前記弁棒の外部露出部位の表面に接触して該弁棒の軸方向変位に追従して回転するローラと、該ローラの回転方向と回転量を検出する検出器を備え、該検出器により検出された回転方向と回転量に基づいて前記弁棒の移動情報を取得する構成であって、前記ローラの回転半径と前記回転量に基づいて前記弁棒の移動量を算出するに際して前記ローラの回転半径を該ローラの撓み変形量に対応して補正する補正手段を備えたことを特徴とする電動弁の診断装置。
【請求項4】
弁棒に連結された弁体が開閉動可能に収納された弁体収納部と、回転駆動力が付与されたウォームの回転駆動力を利用して前記弁棒に螺合するステムナットを回転させることで前記弁棒を昇降駆動して前記弁体を開閉する弁体駆動部と、前記弁体収納部と前記弁体駆動部を連結するヨークとを備えてなる電動弁の機能に関する診断方法であって、
前記弁棒の外部露出部位において該弁棒の移動に関する情報を取得し、該取得された移動情報に基づいて電動弁の機能に関する診断を行うことを特徴とする電動弁の診断方法。
【請求項5】
請求項4において、
前記ヨークの伸び又は縮みが復元した復元時点と、前記弁棒が実際に作動を開始する作動開始時点の少なくとも何れか一方を、前記弁棒の移動情報に基づいて取得し、
前記ヨークの復元時点と前記弁棒の作動開始時点に基づいて前記弁棒のネジ部と前記ステムナットの間のクリアランスを求め、該クリアランスの大きさから前記ステムナットの磨耗状態を診断することを特徴とする電動弁の診断方法。
【請求項6】
請求項4において、
前記ヨークの伸び又は縮みの復元時点を、前記弁棒の移動情報、又は前記ヨークに発生する応力に関する情報に基づいて取得することを特徴とする電動弁の診断方法。
【請求項7】
請求項4において、
前記弁棒の作動開始時点を、前記弁棒の移動情報、又は前記ヨークに発生する応力に関する情報に基づいて取得することを特徴とする電動弁の診断方法。
【請求項8】
請求項4において、
前記ヨークの伸び又は縮みが復元した復元時点と、前記弁棒が実際に作動を開始する作動開始時点を、前記ヨークに発生する応力に関する情報に基づいて取得するとともに、前記弁棒の移動速度を前記弁棒の移動情報に基づいて取得し、
これらの取得情報に基づいて前記弁棒のネジ部と前記ステムナットの間のクリアランスを求め、該クリアランスの大きさから前記ステムナットの磨耗状態を診断することを特徴とする電動弁の診断方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【公開番号】特開2007−121113(P2007−121113A)
【公開日】平成19年5月17日(2007.5.17)
【国際特許分類】
【出願番号】特願2005−313612(P2005−313612)
【出願日】平成17年10月28日(2005.10.28)
【出願人】(000144991)株式会社四国総合研究所 (116)
【Fターム(参考)】
【公開日】平成19年5月17日(2007.5.17)
【国際特許分類】
【出願日】平成17年10月28日(2005.10.28)
【出願人】(000144991)株式会社四国総合研究所 (116)
【Fターム(参考)】
[ Back to top ]