
電動式ドアの開閉制御装置
【課題】戸挟み発生時に障害物を確実に除去し、しかもドアの必要以上の押し戻しによる乗り込み等を予防して安全確保や電車の円滑運行を可能にした開閉制御装置を提供する。
【解決手段】電動機により閉方向に駆動されるドアに障害物が挟まれて戸挟みが発生したことを検出し、ドアの推力に時系列的な強弱を持たせた推力指令値を生成してこの推力指令値に基づきドアを駆動する電動式ドアの開閉制御装置において、ドアの位置を検出する位置検出器5と、この位置検出器5による位置検出値、及び、ドアを開方向に移動させるときの押し戻し許容量が記憶されるメモリ8と、戸挟み検出時のドアの位置を戸挟み開始位置として、ドアの閉動作中に開方向に押し戻されたドアの位置検出値が、前記戸挟み開始位置に前記押し戻し許容量を加えた値を超えたときに、ドアを閉方向に移動させる推力を強くするような推力指令値を生成する戸挟み判定・指令生成器7と、を備える。
【解決手段】電動機により閉方向に駆動されるドアに障害物が挟まれて戸挟みが発生したことを検出し、ドアの推力に時系列的な強弱を持たせた推力指令値を生成してこの推力指令値に基づきドアを駆動する電動式ドアの開閉制御装置において、ドアの位置を検出する位置検出器5と、この位置検出器5による位置検出値、及び、ドアを開方向に移動させるときの押し戻し許容量が記憶されるメモリ8と、戸挟み検出時のドアの位置を戸挟み開始位置として、ドアの閉動作中に開方向に押し戻されたドアの位置検出値が、前記戸挟み開始位置に前記押し戻し許容量を加えた値を超えたときに、ドアを閉方向に移動させる推力を強くするような推力指令値を生成する戸挟み判定・指令生成器7と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば電車用ドア等の電動式ドアの開閉制御装置に関し、詳しくは、電動機により駆動されるドアの閉動作時に人体の一部や荷物等(以下、これらをまとめて障害物という)が挟まれた場合にこれらの障害物を安全に除去可能とした開閉制御装置に関するものである。
【背景技術】
【0002】
電動式ドアの閉動作時に障害物が挟まれた場合(以下、この状態を「戸挟み」という)、これをセンサにより検出してドアの推力を制御することにより、障害物の除去を容易にする動作が安全確保上、重要である。
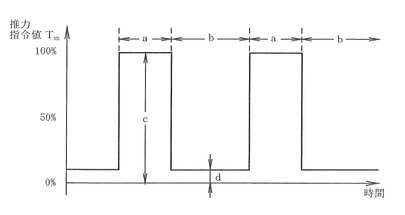
例えば、従来の電動式ドアの開閉制御装置では、戸挟みの発生時に、図8に示すようにドアの推力の強弱が周期的に繰り返される推力指令値をドア駆動用の電動機に与えており、推力が弱まったタイミングで人為的にドアを押し戻せるようにして障害物の除去を容易にしている。
【0003】
図8において、推力の強弱を繰り返すためのパラメータには、強推力期間a、弱推力期間b、強推力c、弱推力dの4つがあり、図8の例では、a=1〔sec〕、b=1.5〔sec〕、c=100〔%〕、d=10〔%〕とした推力指令値を戸挟みが解消されるまで周期的に生成している。
なお、戸挟み発生時に図8と同様の推力指令値を用いてドアを開閉制御する従来技術としては、特許文献1に係る「車両用ドアの開閉装置の制御方法」が知られている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−242499号公報(段落[0046]〜[0049]、図8等)
【発明の概要】
【発明が解決しようとする課題】
【0005】
図8に示した推力指令値に従ってドアを駆動する場合、弱推力期間b(=1.5〔sec〕)ではドアの推力が弱いためにドアを必要以上に押し戻すことも可能である。このため、ドアを大きく押し戻した場合などはドアが再び閉まるまでに多くの時間がかかってしまい、電車の発車が遅れるなど運行に支障をきたすこともある。
また、弱推力期間bには、閉まりかかったドアを乗客が無理やり開けて強引に乗り込むことも不可能ではない。従って、図8のように、強推力期間aと弱推力期間bとを単に周期的に繰り返す方法は、電車の円滑運行や安全確保の観点からは弱点を持った制御方法であると言わざるを得ない。
【0006】
仮に、弱推力期間bを0.2〔sec〕のように極力短くすれば、ドアを必要以上に押し戻す行為を防ぐことができるが、本来の目的である、ドアに挟まれた障害物を確実に除去することが難しくなる。
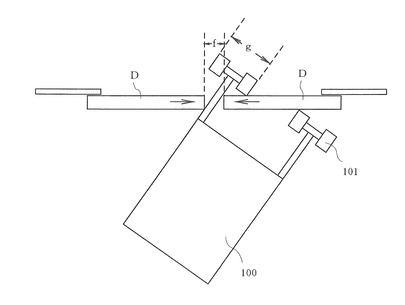
更に、図7に示すように、ドアDにベビーカー100の車輪101が挟まって簡単に引き抜けない場合など、障害物を除去するために十分長い時間が必要な場合には、弱推力期間bを例えば1〔sec〕程度確保してドアDを開方向へ大きく押し戻すことが望まれる。なお、図7において、fは戸挟みの幅(ドアDの開空間の幅)、gは車輪101の幅を示す。
以上の説明からわかるように、弱推力期間bを単純に短くするといった方法は採用することができない。
【0007】
そこで、本発明の解決課題は、戸挟みの発生時に障害物を確実に除去することができ、しかもドアの必要以上の押し戻しによる無理な乗り込み等を予防して安全の確保や電車の円滑運行を可能にした電動式ドアの開閉制御装置を提供することにある。
【課題を解決するための手段】
【0008】
上記課題を解決するため、請求項1に係る発明は、電動機により閉方向に駆動されるドアに障害物が挟まれて戸挟みが発生したことを検出し、ドアの推力に時系列的な強弱を持たせた推力指令値を生成してこの推力指令値に基づきドアを駆動する電動式ドアの開閉制御装置において、
ドアの位置を検出する位置検出手段と、
前記位置検出手段による位置検出値、及び、ドアを開方向に移動させるときの押し戻し許容量が記憶される記憶手段と、
前記戸挟みを検出したときのドアの位置を戸挟み開始位置として、ドアの閉動作中に開方向に押し戻されたドアの位置検出値が、前記戸挟み開始位置に前記押し戻し許容量を加えた値を超えたときに、ドアを閉方向に移動させる推力を強くするような推力指令値を生成する推力指令生成手段と、を備えたものである。
【0009】
請求項2に係る発明は、請求項1に記載した電動式ドアの開閉制御装置において、前記推力指令生成手段は、前記推力指令値の推力を強くするタイミングにおけるドアの位置検出値を、前記戸挟み開始位置として前記記憶手段に再度記憶させるものである。
【0010】
請求項3に係る発明は、請求項1に記載した電動式ドアの開閉制御装置において、前記推力指令生成手段は、前記戸挟みの発生回数を計測し、その発生回数に応じて前記押し戻し許容量を増加させるものである。
【発明の効果】
【0011】
本発明によれば、戸挟み発生時の障害物の除去、及び、ドアの必要以上の押し戻し防止という目的を同時に達成することができる。特に、複雑な形状・構造の障害物がドアに挟まれた場合にも、この障害物を迅速かつ安全、確実に除去することが可能であり、電車等の運行の円滑化にも寄与するものである。
【図面の簡単な説明】
【0012】
【図1】本発明の実施形態に係る開閉制御装置のブロック図である。
【図2】実施例1における位置検出値と推力指令値との時間的変化を示す波形図である。
【図3】実施例2における位置検出値と推力指令値との時間的変化を示す波形図である。
【図4】実施例3における位置検出値と推力指令値との時間的変化を示す波形図である。
【図5】実施例3の課題を説明するための波形図である。
【図6】実施例4における位置検出値と推力指令値との時間的変化を示す波形図である。
【図7】ベビーカーの車輪がドアに挟まった状態を示す平面図である。
【図8】戸挟み発生時における従来の推力指令値を示す波形図である。
【発明を実施するための形態】
【0013】
以下、図に沿って本発明の実施形態を説明する。
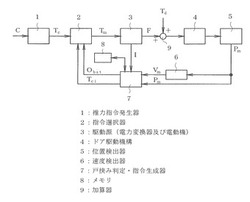
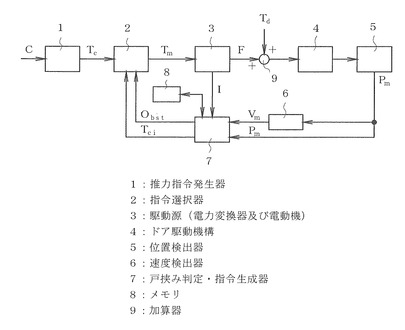
まず、図1は、この実施形態に係る開閉制御装置のブロック図である。
図1において、推力指令発生器1は、入力された開閉動作指令値Cからドア駆動用リニアモータ等の電動機に対する開閉動作時推力指令値Tcを生成して出力する。指令選択器2は、通常時は開閉動作時推力指令値Tcを、また、後述する戸挟み判定・指令生成器7から戸挟み判定信号Obstが入力されたときは同じく戸挟み判定・指令生成器7からの戸挟み時推力指令値Tciを選択し、その選択した指令値TcまたはTciを推力指令値Tmとして出力する。
【0014】
駆動源3は、電力変換器と電動機とから構成されており、推力指令値Tmに従ってドアを開閉するための推力Fを発生し、ドア駆動機構4に与える。このドア駆動機構4は、上記推力をドアに伝達するための周知の機械要素及びドアからなっている。なお、9は外乱Tdを推力Fに加算するための加算器である。
【0015】
ドア駆動機構4に取り付けられた位置検出器5はドアの位置(電動機による駆動位置に相当)を検出し、戸挟み判定・指令生成器7に位置検出値Pmを出力する。ここで、戸挟み判定・指令生成器7は、請求項における推力指令生成手段に相当している。
速度検出器6は、位置検出値Pmからドアの速度(電動機の速度に相当)を演算し、速度検出値Vmとして出力する。
【0016】
戸挟み判定・指令生成器7は、電動機の駆動電流値Iが一定値を超える、あるいは、速度検出値Vmが一定値以下になる、位置検出値Pmがドアの開状態、閉状態の間で変化していな、などの情報から、障害物がドアに挟まって戸挟みが発生したことを検出し、戸挟み判定信号Obstを出力すると共に、戸挟み時推力指令値Tciを演算して出力する。なお、戸挟み判定信号Obstが出力されたときの位置検出値Pmは、戸挟み開始位置としてメモリ8に記憶されると共に、このメモリ8には、後述する押し戻し許容量eも予め記憶されている。
【0017】
次に、この実施形態の動作を図2〜図6を参照しつつ説明する。これらの動作では、指令選択器2から出力される推力指令値Tmがそれぞれ異なっており、以下では実施例1〜実施例4として説明する。
【実施例1】
【0018】
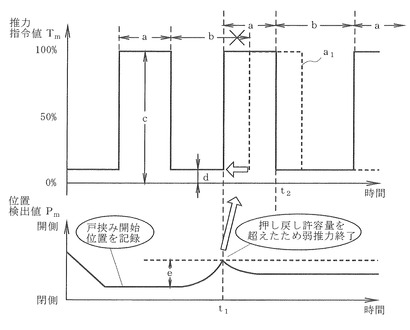
図2は、実施例1における位置検出値Pmとこれに応じた推力指令値Tmとの時間的変化を示す波形図であり、請求項1に係る発明に相当する。
ドアの閉動作中に、戸挟み判定・指令生成器7が駆動電流値Iや速度検出値Vm等に基づいて戸挟みを検出すると、戸挟み判定信号Obstを指令選択器2に出力すると共に、そのときの位置検出値Pmをメモリ8に記録し、予め設定されたパターンに従って戸挟み時推力指令値Tciを出力する。この戸挟み時推力指令値Tciは、図8に示したように強推力期間a、弱推力期間b、強推力c、弱推力dをパラメータに持つ推力指令値Tmとして、駆動源3に与えられる。
【0019】
いま、図2の弱推力時間bにおいて、時刻t1でドアの位置検出値Pmがメモリ8内の戸挟み開始位置と押し戻し許容量eとの和を超えると、戸挟み判定・指令生成器7は、ドアが障害物の除去に必要な距離以上に押し戻されたと判断して弱推力期間bを強制的に終了させ、直ちに強推力期間aに移行させるような戸挟み時推力指令値Tciを生成する。このため、時刻t1以後は、本来の弱推力期間bが短縮されて瞬時に強推力期間aに移るような推力指令値Tciが生成され、この推力指令値Tciは、指令選択器2を介し推力指令値Tmとして出力される。
図2に示す如く、時刻t1以後の強推力期間a内に位置検出値Pmが戸挟み開始位置と押し戻し許容量eとの和より小さくなれば、強推力期間aが終了した時刻t2から再び弱推力期間bが開始される。
なお、図2の推力指令値Tmに破線で示した部分a1は、図8における本来の強推力期間aに相当する部分である。
【0020】
実施例1によれば、推力指令値Tmの弱推力期間b内に押し戻し許容量eを超える押し戻しが発生したときには瞬時に強推力期間aに移行させることにより、戸挟み以外の状況でドアを無理に開けて乗り込むような動作を禁止させることができる。なお、押し戻し許容量eは、少なくとも戸挟み状態で障害物を除去するために必要な移動距離に相当する。
【0021】
この実施例1は、現時点が弱推力期間bである場合にドアの位置(移動距離)が戸挟み開始位置と押し戻し許容量eとの和を超えたか否かを検出する機能を追加して新たな推力指令値を生成するという原理に基づいているため、制御装置としての実現も容易である。また、ドアの位置が押し戻し許容量eを超えない限り、従来と同様にドアの押し戻しによる障害物の除去が可能である。
【実施例2】
【0022】
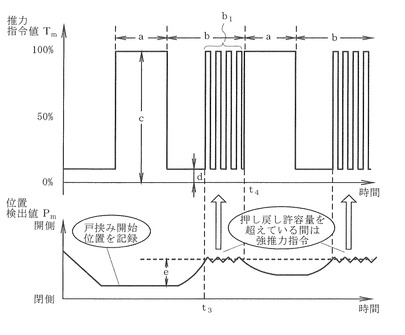
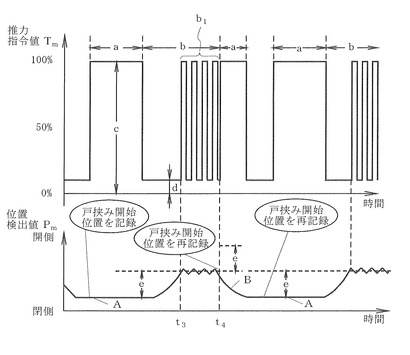
図3は、実施例2における位置検出値Pmと推力指令値Tmとの時間的変化を示す波形図であり、この実施例2も請求項1に係る発明に相当する。
実施例2では、戸挟み判定・指令生成器7が、図3の弱推力時間bにおける時刻t3以後の部分b1のように、位置検出値Pmが戸挟み開始位置と押し戻し許容量eとの和を超えるたびに弱推力期間bを強制的に終了させて直ちに強推力期間aに移行させるような戸挟み時推力指令値Tciを生成し、この推力指令値Tciを指令選択器2を介し推力指令値Tmとして出力する。そして、時刻t4以後は、本来の強推力期間aに移行させる。
【0023】
実施例2によれば、時刻t3で位置検出値Pmが戸挟み開始位置と押し戻し許容量eとの和を超えて強推力cが働いたとしても、その後に位置検出値Pmが前記の和を下回れば弱推力dに復帰する動作が繰り返されるので、この弱推力dの期間にドアを軽く押し戻すことができ、その間に障害物を除去することができる。
なお、時刻t3以後に位置検出値Pmが戸挟み開始位置と押し戻し許容量eとの和を上回り続けている場合には、強推力cの期間が持続するので、実施例1と同様にドアを無理に開けて乗り込むような動作を禁止させることができる。
【0024】
この実施例2において、図3の部分b1のごとく推力指令値Tmを急激に変化させる場合には、図1の駆動源3、ドア駆動機構4の応答特性により振動等が発生することが想定されるが、戸挟み時推力指令値Tciをローパスフィルタに通したものを推力指令値Tmとする等の方法により、改善が可能である。
【実施例3】
【0025】
実施例1,2において、図7に示したベビーカー100の車輪101のように引き抜きの難しい形状・構造の障害物が挟まれた場合、この障害物を除去するために必要なドアの押し戻し量(車輪の幅g−戸挟みの幅f)が押し戻し許容量eより大きい場合、障害物を除去することが不可能となる。
基本的には、図7の車輪101等の除去が困難な形状・構造を考慮して押し戻し許容量eを予め決定することとなるが、どのような形状・構造のものが挟まるかは想定が難しく、ある程度の余裕を持たせて押し戻し許容量eを大きく設定してしまうと、不要な押し戻しを禁止できなくなる。
そこで、実施例3は上記の問題を解決するためのものである。
【0026】
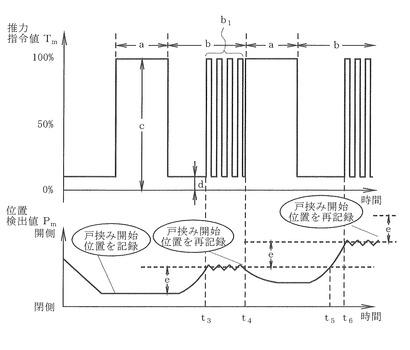
図4は、実施例3における位置検出値Pmと推力指令値Tmとの時間的変化を示す波形図であり、請求項2に係る発明に相当する。ここでは、実施例2における上記問題点の改善例を示しているが、実施例1にも適用可能である。
すなわち、実施例1,2では最初に戸挟みを検出した戸挟み開始位置を基準値として押し戻し許容量eを規定しているが、実施例3では、図4に示すように、弱推力期間b内に位置検出値Pmが戸挟み開始位置と押し戻し許容量eとの和を超えてからその後に到来する本来の強推力期間aの開始時(時刻t4)に、戸挟み判定・指令生成器7が戸挟み開始位置をメモリ8に再度、記憶させる。
【0027】
この場合、図3と図4との比較から明らかなように、時刻t4以後に位置検出値Pmが戸挟み開始位置と押し戻し許容量eとの和を下回り、その後の時刻t5において再び前記の和を上回った場合に、許容量eの基準値が(最初の戸挟み開始位置+押し戻し許容量e)となり、言い換えれば、ドアの開方向に向けて(最初の戸挟み開始位置+n×押し戻し許容量e)だけドアの移動が許容されることになる。ここで、nは複数である。
従って、図7に示したように複雑な形状・構造の障害物がドアに挟まれて引き抜きが困難な場合でも、複数回にわたって到来する弱推力dの期間に、例えば車輪の幅g以上にドアを押し戻すことが可能になり、実施例1,2における問題点を解消することができる。
【0028】
また、実施例3によれば、押し戻し許容量eを小さく設定したとしても、その複数倍の距離を当初の戸挟み開始位置に加算した距離までドアを移動させることが可能である。すなわち、押し戻し許容量eを小さく設定することで不要な押し戻しを防止できると同時に、弱推力dをより小さい値に設定しても差し支えないため、戸挟みが発生した際にドアの押し戻しに要する力が少なくて済む。このため、ベビーカー100等の障害物が挟まれて緊急を要する場合でも、わずかな力でドアを押し戻して障害物を除去することが可能であり、安全性の向上や電車の円滑な運行に寄与することができる。
【実施例4】
【0029】
この実施例4は、上述した実施例3を更に改善したものであり、請求項3に係る発明に相当する。
実施例3によれば、理論的には(最初の戸挟み開始位置+n×押し戻し許容量e)だけドアの移動が許容されるが、発明者の実験によれば、以下に述べるような課題が存在する。
すなわち、図5において、時刻t3以前にベビーカー100等の障害物が戸挟み状態となり(この状態の位置検出値PmをAにて示す)、その後、時刻t4までドアを押し戻したとしても、時刻t4から強推力期間aが再開するため、強推力cに抗しきれずにドアが閉方向に移動してしまい(この状態の位置検出値PmをBにて示す)、障害物が挟まったままの状態で位置検出値Pmが当初のAに戻ってしまう。
【0030】
この状態で、戸挟み判定・指令生成器7が駆動電流値Imや速度検出値Vm等に基づいて戸挟みの発生を検出すると、その時の位置検出値Pm(図7のようにベビーカー100が挟まった場合には、戸挟みの幅fが残った状態のドアの位置)、すなわち当初のAが戸挟み開始位置としてメモリ8に再記録されることになる。よって、その後は、上記Aを基準値として更に押し戻し許容量eを加算しても、ドアの十分な移動量が確保されなくなり、ベビーカー100等の障害物を除去できないおそれがある。
そこで、実施例4は上記の問題を解決するためのものである。
【0031】
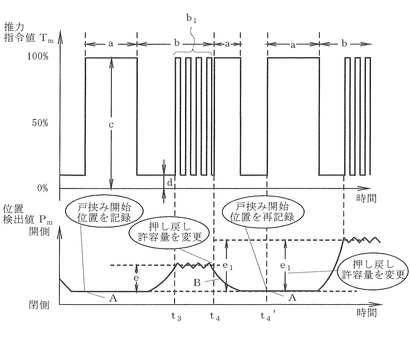
図6は、実施例4における位置検出値と推力指令値との時間的変化を示す波形図である。
この図6において、時刻t4以前の動作は図3〜図5と同様であり、位置検出値Pmが戸挟み開始位置と当初の押し戻し許容量eとの和を超えるような押し戻しを検出している間は推力指令値Tmを強推力cにすることで、無理な押し戻しを禁止させる。
【0032】
更に本実施例では、戸挟みの開始や強推力cの開始などのタイミングにより、戸挟み判定・指令生成器7が戸挟み発生回数をカウントし、メモリ8に記録する。そして、カウントした戸挟み発生回数が予め設定した閾値を超えた場合には、例えば図6における時刻t4やt4’において、押し戻し許容量を当初のeからe1に変更する(ここで、e<e1である)。
このように押し戻し許容量を変更すれば、実質的に図4と同様の作用によりドアの移動可能距離を長く確保することができ、ベビーカー100の車輪101等の障害物が挟まれた場合でも、弱推力期間bの間にドアを押し戻すことによって障害物を除去することが可能になる。
【0033】
なお、戸挟み発生回数と変更後の押し戻し許容量e1との関係は、戸挟み発生回数に比例させて押し戻し許容量を増加させる、または、戸挟み発生回数が一定値を超えた場合に押し戻し許容量を増加させるなど、いくつかのパターンが考えられるが、障害物によって適切なパターンが異なるため、特に限定されるものではない。
【産業上の利用可能性】
【0034】
本発明は、電車用ドアだけでなく、エレベータ用ドア等の建物内の自動ドアの開閉制御装置としても利用可能である。
【符号の説明】
【0035】
1:推力指令発生器
2:指令選択器
3:駆動源(電力変換器及び電動機)
4:ドア駆動機構
5:位置検出器
6:速度検出器
7:戸挟み判定・指令生成器
8:メモリ
9:加算器
100:ベビーカー
101:車輪
D:ドア
【技術分野】
【0001】
本発明は、例えば電車用ドア等の電動式ドアの開閉制御装置に関し、詳しくは、電動機により駆動されるドアの閉動作時に人体の一部や荷物等(以下、これらをまとめて障害物という)が挟まれた場合にこれらの障害物を安全に除去可能とした開閉制御装置に関するものである。
【背景技術】
【0002】
電動式ドアの閉動作時に障害物が挟まれた場合(以下、この状態を「戸挟み」という)、これをセンサにより検出してドアの推力を制御することにより、障害物の除去を容易にする動作が安全確保上、重要である。
例えば、従来の電動式ドアの開閉制御装置では、戸挟みの発生時に、図8に示すようにドアの推力の強弱が周期的に繰り返される推力指令値をドア駆動用の電動機に与えており、推力が弱まったタイミングで人為的にドアを押し戻せるようにして障害物の除去を容易にしている。
【0003】
図8において、推力の強弱を繰り返すためのパラメータには、強推力期間a、弱推力期間b、強推力c、弱推力dの4つがあり、図8の例では、a=1〔sec〕、b=1.5〔sec〕、c=100〔%〕、d=10〔%〕とした推力指令値を戸挟みが解消されるまで周期的に生成している。
なお、戸挟み発生時に図8と同様の推力指令値を用いてドアを開閉制御する従来技術としては、特許文献1に係る「車両用ドアの開閉装置の制御方法」が知られている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−242499号公報(段落[0046]〜[0049]、図8等)
【発明の概要】
【発明が解決しようとする課題】
【0005】
図8に示した推力指令値に従ってドアを駆動する場合、弱推力期間b(=1.5〔sec〕)ではドアの推力が弱いためにドアを必要以上に押し戻すことも可能である。このため、ドアを大きく押し戻した場合などはドアが再び閉まるまでに多くの時間がかかってしまい、電車の発車が遅れるなど運行に支障をきたすこともある。
また、弱推力期間bには、閉まりかかったドアを乗客が無理やり開けて強引に乗り込むことも不可能ではない。従って、図8のように、強推力期間aと弱推力期間bとを単に周期的に繰り返す方法は、電車の円滑運行や安全確保の観点からは弱点を持った制御方法であると言わざるを得ない。
【0006】
仮に、弱推力期間bを0.2〔sec〕のように極力短くすれば、ドアを必要以上に押し戻す行為を防ぐことができるが、本来の目的である、ドアに挟まれた障害物を確実に除去することが難しくなる。
更に、図7に示すように、ドアDにベビーカー100の車輪101が挟まって簡単に引き抜けない場合など、障害物を除去するために十分長い時間が必要な場合には、弱推力期間bを例えば1〔sec〕程度確保してドアDを開方向へ大きく押し戻すことが望まれる。なお、図7において、fは戸挟みの幅(ドアDの開空間の幅)、gは車輪101の幅を示す。
以上の説明からわかるように、弱推力期間bを単純に短くするといった方法は採用することができない。
【0007】
そこで、本発明の解決課題は、戸挟みの発生時に障害物を確実に除去することができ、しかもドアの必要以上の押し戻しによる無理な乗り込み等を予防して安全の確保や電車の円滑運行を可能にした電動式ドアの開閉制御装置を提供することにある。
【課題を解決するための手段】
【0008】
上記課題を解決するため、請求項1に係る発明は、電動機により閉方向に駆動されるドアに障害物が挟まれて戸挟みが発生したことを検出し、ドアの推力に時系列的な強弱を持たせた推力指令値を生成してこの推力指令値に基づきドアを駆動する電動式ドアの開閉制御装置において、
ドアの位置を検出する位置検出手段と、
前記位置検出手段による位置検出値、及び、ドアを開方向に移動させるときの押し戻し許容量が記憶される記憶手段と、
前記戸挟みを検出したときのドアの位置を戸挟み開始位置として、ドアの閉動作中に開方向に押し戻されたドアの位置検出値が、前記戸挟み開始位置に前記押し戻し許容量を加えた値を超えたときに、ドアを閉方向に移動させる推力を強くするような推力指令値を生成する推力指令生成手段と、を備えたものである。
【0009】
請求項2に係る発明は、請求項1に記載した電動式ドアの開閉制御装置において、前記推力指令生成手段は、前記推力指令値の推力を強くするタイミングにおけるドアの位置検出値を、前記戸挟み開始位置として前記記憶手段に再度記憶させるものである。
【0010】
請求項3に係る発明は、請求項1に記載した電動式ドアの開閉制御装置において、前記推力指令生成手段は、前記戸挟みの発生回数を計測し、その発生回数に応じて前記押し戻し許容量を増加させるものである。
【発明の効果】
【0011】
本発明によれば、戸挟み発生時の障害物の除去、及び、ドアの必要以上の押し戻し防止という目的を同時に達成することができる。特に、複雑な形状・構造の障害物がドアに挟まれた場合にも、この障害物を迅速かつ安全、確実に除去することが可能であり、電車等の運行の円滑化にも寄与するものである。
【図面の簡単な説明】
【0012】
【図1】本発明の実施形態に係る開閉制御装置のブロック図である。
【図2】実施例1における位置検出値と推力指令値との時間的変化を示す波形図である。
【図3】実施例2における位置検出値と推力指令値との時間的変化を示す波形図である。
【図4】実施例3における位置検出値と推力指令値との時間的変化を示す波形図である。
【図5】実施例3の課題を説明するための波形図である。
【図6】実施例4における位置検出値と推力指令値との時間的変化を示す波形図である。
【図7】ベビーカーの車輪がドアに挟まった状態を示す平面図である。
【図8】戸挟み発生時における従来の推力指令値を示す波形図である。
【発明を実施するための形態】
【0013】
以下、図に沿って本発明の実施形態を説明する。
まず、図1は、この実施形態に係る開閉制御装置のブロック図である。
図1において、推力指令発生器1は、入力された開閉動作指令値Cからドア駆動用リニアモータ等の電動機に対する開閉動作時推力指令値Tcを生成して出力する。指令選択器2は、通常時は開閉動作時推力指令値Tcを、また、後述する戸挟み判定・指令生成器7から戸挟み判定信号Obstが入力されたときは同じく戸挟み判定・指令生成器7からの戸挟み時推力指令値Tciを選択し、その選択した指令値TcまたはTciを推力指令値Tmとして出力する。
【0014】
駆動源3は、電力変換器と電動機とから構成されており、推力指令値Tmに従ってドアを開閉するための推力Fを発生し、ドア駆動機構4に与える。このドア駆動機構4は、上記推力をドアに伝達するための周知の機械要素及びドアからなっている。なお、9は外乱Tdを推力Fに加算するための加算器である。
【0015】
ドア駆動機構4に取り付けられた位置検出器5はドアの位置(電動機による駆動位置に相当)を検出し、戸挟み判定・指令生成器7に位置検出値Pmを出力する。ここで、戸挟み判定・指令生成器7は、請求項における推力指令生成手段に相当している。
速度検出器6は、位置検出値Pmからドアの速度(電動機の速度に相当)を演算し、速度検出値Vmとして出力する。
【0016】
戸挟み判定・指令生成器7は、電動機の駆動電流値Iが一定値を超える、あるいは、速度検出値Vmが一定値以下になる、位置検出値Pmがドアの開状態、閉状態の間で変化していな、などの情報から、障害物がドアに挟まって戸挟みが発生したことを検出し、戸挟み判定信号Obstを出力すると共に、戸挟み時推力指令値Tciを演算して出力する。なお、戸挟み判定信号Obstが出力されたときの位置検出値Pmは、戸挟み開始位置としてメモリ8に記憶されると共に、このメモリ8には、後述する押し戻し許容量eも予め記憶されている。
【0017】
次に、この実施形態の動作を図2〜図6を参照しつつ説明する。これらの動作では、指令選択器2から出力される推力指令値Tmがそれぞれ異なっており、以下では実施例1〜実施例4として説明する。
【実施例1】
【0018】
図2は、実施例1における位置検出値Pmとこれに応じた推力指令値Tmとの時間的変化を示す波形図であり、請求項1に係る発明に相当する。
ドアの閉動作中に、戸挟み判定・指令生成器7が駆動電流値Iや速度検出値Vm等に基づいて戸挟みを検出すると、戸挟み判定信号Obstを指令選択器2に出力すると共に、そのときの位置検出値Pmをメモリ8に記録し、予め設定されたパターンに従って戸挟み時推力指令値Tciを出力する。この戸挟み時推力指令値Tciは、図8に示したように強推力期間a、弱推力期間b、強推力c、弱推力dをパラメータに持つ推力指令値Tmとして、駆動源3に与えられる。
【0019】
いま、図2の弱推力時間bにおいて、時刻t1でドアの位置検出値Pmがメモリ8内の戸挟み開始位置と押し戻し許容量eとの和を超えると、戸挟み判定・指令生成器7は、ドアが障害物の除去に必要な距離以上に押し戻されたと判断して弱推力期間bを強制的に終了させ、直ちに強推力期間aに移行させるような戸挟み時推力指令値Tciを生成する。このため、時刻t1以後は、本来の弱推力期間bが短縮されて瞬時に強推力期間aに移るような推力指令値Tciが生成され、この推力指令値Tciは、指令選択器2を介し推力指令値Tmとして出力される。
図2に示す如く、時刻t1以後の強推力期間a内に位置検出値Pmが戸挟み開始位置と押し戻し許容量eとの和より小さくなれば、強推力期間aが終了した時刻t2から再び弱推力期間bが開始される。
なお、図2の推力指令値Tmに破線で示した部分a1は、図8における本来の強推力期間aに相当する部分である。
【0020】
実施例1によれば、推力指令値Tmの弱推力期間b内に押し戻し許容量eを超える押し戻しが発生したときには瞬時に強推力期間aに移行させることにより、戸挟み以外の状況でドアを無理に開けて乗り込むような動作を禁止させることができる。なお、押し戻し許容量eは、少なくとも戸挟み状態で障害物を除去するために必要な移動距離に相当する。
【0021】
この実施例1は、現時点が弱推力期間bである場合にドアの位置(移動距離)が戸挟み開始位置と押し戻し許容量eとの和を超えたか否かを検出する機能を追加して新たな推力指令値を生成するという原理に基づいているため、制御装置としての実現も容易である。また、ドアの位置が押し戻し許容量eを超えない限り、従来と同様にドアの押し戻しによる障害物の除去が可能である。
【実施例2】
【0022】
図3は、実施例2における位置検出値Pmと推力指令値Tmとの時間的変化を示す波形図であり、この実施例2も請求項1に係る発明に相当する。
実施例2では、戸挟み判定・指令生成器7が、図3の弱推力時間bにおける時刻t3以後の部分b1のように、位置検出値Pmが戸挟み開始位置と押し戻し許容量eとの和を超えるたびに弱推力期間bを強制的に終了させて直ちに強推力期間aに移行させるような戸挟み時推力指令値Tciを生成し、この推力指令値Tciを指令選択器2を介し推力指令値Tmとして出力する。そして、時刻t4以後は、本来の強推力期間aに移行させる。
【0023】
実施例2によれば、時刻t3で位置検出値Pmが戸挟み開始位置と押し戻し許容量eとの和を超えて強推力cが働いたとしても、その後に位置検出値Pmが前記の和を下回れば弱推力dに復帰する動作が繰り返されるので、この弱推力dの期間にドアを軽く押し戻すことができ、その間に障害物を除去することができる。
なお、時刻t3以後に位置検出値Pmが戸挟み開始位置と押し戻し許容量eとの和を上回り続けている場合には、強推力cの期間が持続するので、実施例1と同様にドアを無理に開けて乗り込むような動作を禁止させることができる。
【0024】
この実施例2において、図3の部分b1のごとく推力指令値Tmを急激に変化させる場合には、図1の駆動源3、ドア駆動機構4の応答特性により振動等が発生することが想定されるが、戸挟み時推力指令値Tciをローパスフィルタに通したものを推力指令値Tmとする等の方法により、改善が可能である。
【実施例3】
【0025】
実施例1,2において、図7に示したベビーカー100の車輪101のように引き抜きの難しい形状・構造の障害物が挟まれた場合、この障害物を除去するために必要なドアの押し戻し量(車輪の幅g−戸挟みの幅f)が押し戻し許容量eより大きい場合、障害物を除去することが不可能となる。
基本的には、図7の車輪101等の除去が困難な形状・構造を考慮して押し戻し許容量eを予め決定することとなるが、どのような形状・構造のものが挟まるかは想定が難しく、ある程度の余裕を持たせて押し戻し許容量eを大きく設定してしまうと、不要な押し戻しを禁止できなくなる。
そこで、実施例3は上記の問題を解決するためのものである。
【0026】
図4は、実施例3における位置検出値Pmと推力指令値Tmとの時間的変化を示す波形図であり、請求項2に係る発明に相当する。ここでは、実施例2における上記問題点の改善例を示しているが、実施例1にも適用可能である。
すなわち、実施例1,2では最初に戸挟みを検出した戸挟み開始位置を基準値として押し戻し許容量eを規定しているが、実施例3では、図4に示すように、弱推力期間b内に位置検出値Pmが戸挟み開始位置と押し戻し許容量eとの和を超えてからその後に到来する本来の強推力期間aの開始時(時刻t4)に、戸挟み判定・指令生成器7が戸挟み開始位置をメモリ8に再度、記憶させる。
【0027】
この場合、図3と図4との比較から明らかなように、時刻t4以後に位置検出値Pmが戸挟み開始位置と押し戻し許容量eとの和を下回り、その後の時刻t5において再び前記の和を上回った場合に、許容量eの基準値が(最初の戸挟み開始位置+押し戻し許容量e)となり、言い換えれば、ドアの開方向に向けて(最初の戸挟み開始位置+n×押し戻し許容量e)だけドアの移動が許容されることになる。ここで、nは複数である。
従って、図7に示したように複雑な形状・構造の障害物がドアに挟まれて引き抜きが困難な場合でも、複数回にわたって到来する弱推力dの期間に、例えば車輪の幅g以上にドアを押し戻すことが可能になり、実施例1,2における問題点を解消することができる。
【0028】
また、実施例3によれば、押し戻し許容量eを小さく設定したとしても、その複数倍の距離を当初の戸挟み開始位置に加算した距離までドアを移動させることが可能である。すなわち、押し戻し許容量eを小さく設定することで不要な押し戻しを防止できると同時に、弱推力dをより小さい値に設定しても差し支えないため、戸挟みが発生した際にドアの押し戻しに要する力が少なくて済む。このため、ベビーカー100等の障害物が挟まれて緊急を要する場合でも、わずかな力でドアを押し戻して障害物を除去することが可能であり、安全性の向上や電車の円滑な運行に寄与することができる。
【実施例4】
【0029】
この実施例4は、上述した実施例3を更に改善したものであり、請求項3に係る発明に相当する。
実施例3によれば、理論的には(最初の戸挟み開始位置+n×押し戻し許容量e)だけドアの移動が許容されるが、発明者の実験によれば、以下に述べるような課題が存在する。
すなわち、図5において、時刻t3以前にベビーカー100等の障害物が戸挟み状態となり(この状態の位置検出値PmをAにて示す)、その後、時刻t4までドアを押し戻したとしても、時刻t4から強推力期間aが再開するため、強推力cに抗しきれずにドアが閉方向に移動してしまい(この状態の位置検出値PmをBにて示す)、障害物が挟まったままの状態で位置検出値Pmが当初のAに戻ってしまう。
【0030】
この状態で、戸挟み判定・指令生成器7が駆動電流値Imや速度検出値Vm等に基づいて戸挟みの発生を検出すると、その時の位置検出値Pm(図7のようにベビーカー100が挟まった場合には、戸挟みの幅fが残った状態のドアの位置)、すなわち当初のAが戸挟み開始位置としてメモリ8に再記録されることになる。よって、その後は、上記Aを基準値として更に押し戻し許容量eを加算しても、ドアの十分な移動量が確保されなくなり、ベビーカー100等の障害物を除去できないおそれがある。
そこで、実施例4は上記の問題を解決するためのものである。
【0031】
図6は、実施例4における位置検出値と推力指令値との時間的変化を示す波形図である。
この図6において、時刻t4以前の動作は図3〜図5と同様であり、位置検出値Pmが戸挟み開始位置と当初の押し戻し許容量eとの和を超えるような押し戻しを検出している間は推力指令値Tmを強推力cにすることで、無理な押し戻しを禁止させる。
【0032】
更に本実施例では、戸挟みの開始や強推力cの開始などのタイミングにより、戸挟み判定・指令生成器7が戸挟み発生回数をカウントし、メモリ8に記録する。そして、カウントした戸挟み発生回数が予め設定した閾値を超えた場合には、例えば図6における時刻t4やt4’において、押し戻し許容量を当初のeからe1に変更する(ここで、e<e1である)。
このように押し戻し許容量を変更すれば、実質的に図4と同様の作用によりドアの移動可能距離を長く確保することができ、ベビーカー100の車輪101等の障害物が挟まれた場合でも、弱推力期間bの間にドアを押し戻すことによって障害物を除去することが可能になる。
【0033】
なお、戸挟み発生回数と変更後の押し戻し許容量e1との関係は、戸挟み発生回数に比例させて押し戻し許容量を増加させる、または、戸挟み発生回数が一定値を超えた場合に押し戻し許容量を増加させるなど、いくつかのパターンが考えられるが、障害物によって適切なパターンが異なるため、特に限定されるものではない。
【産業上の利用可能性】
【0034】
本発明は、電車用ドアだけでなく、エレベータ用ドア等の建物内の自動ドアの開閉制御装置としても利用可能である。
【符号の説明】
【0035】
1:推力指令発生器
2:指令選択器
3:駆動源(電力変換器及び電動機)
4:ドア駆動機構
5:位置検出器
6:速度検出器
7:戸挟み判定・指令生成器
8:メモリ
9:加算器
100:ベビーカー
101:車輪
D:ドア
【特許請求の範囲】
【請求項1】
電動機により閉方向に駆動されるドアに障害物が挟まれて戸挟みが発生したことを検出し、ドアの推力に時系列的な強弱を持たせた推力指令値を生成してこの推力指令値に基づきドアを駆動する電動式ドアの開閉制御装置において、
ドアの位置を検出する位置検出手段と、
前記位置検出手段による位置検出値、及び、ドアを開方向に移動させるときの押し戻し許容量が記憶される記憶手段と、
前記戸挟みを検出したときのドアの位置を戸挟み開始位置として、ドアの閉動作中に開方向に押し戻されたドアの位置検出値が、前記戸挟み開始位置に前記押し戻し許容量を加えた値を超えたときに、ドアを閉方向に移動させる推力を強くするような推力指令値を生成する推力指令生成手段と、
を備えたことを特徴とする電動式ドアの開閉制御装置。
【請求項2】
請求項1に記載した電動式ドアの開閉制御装置において、
前記推力指令生成手段は、前記推力指令値の推力を強くするタイミングにおけるドアの位置検出値を、前記戸挟み開始位置として前記記憶手段に再度記憶させることを特徴とする電動式ドアの開閉制御装置。
【請求項3】
請求項1に記載した電動式ドアの開閉制御装置において、
前記推力指令生成手段は、前記戸挟みの発生回数を計測し、その発生回数に応じて前記押し戻し許容量を増加させることを特徴とする電動式ドアの開閉制御装置。
【請求項1】
電動機により閉方向に駆動されるドアに障害物が挟まれて戸挟みが発生したことを検出し、ドアの推力に時系列的な強弱を持たせた推力指令値を生成してこの推力指令値に基づきドアを駆動する電動式ドアの開閉制御装置において、
ドアの位置を検出する位置検出手段と、
前記位置検出手段による位置検出値、及び、ドアを開方向に移動させるときの押し戻し許容量が記憶される記憶手段と、
前記戸挟みを検出したときのドアの位置を戸挟み開始位置として、ドアの閉動作中に開方向に押し戻されたドアの位置検出値が、前記戸挟み開始位置に前記押し戻し許容量を加えた値を超えたときに、ドアを閉方向に移動させる推力を強くするような推力指令値を生成する推力指令生成手段と、
を備えたことを特徴とする電動式ドアの開閉制御装置。
【請求項2】
請求項1に記載した電動式ドアの開閉制御装置において、
前記推力指令生成手段は、前記推力指令値の推力を強くするタイミングにおけるドアの位置検出値を、前記戸挟み開始位置として前記記憶手段に再度記憶させることを特徴とする電動式ドアの開閉制御装置。
【請求項3】
請求項1に記載した電動式ドアの開閉制御装置において、
前記推力指令生成手段は、前記戸挟みの発生回数を計測し、その発生回数に応じて前記押し戻し許容量を増加させることを特徴とする電動式ドアの開閉制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2012−7432(P2012−7432A)
【公開日】平成24年1月12日(2012.1.12)
【国際特許分類】
【出願番号】特願2010−145980(P2010−145980)
【出願日】平成22年6月28日(2010.6.28)
【出願人】(000005234)富士電機株式会社 (3,146)
【Fターム(参考)】
【公開日】平成24年1月12日(2012.1.12)
【国際特許分類】
【出願日】平成22年6月28日(2010.6.28)
【出願人】(000005234)富士電機株式会社 (3,146)
【Fターム(参考)】
[ Back to top ]