
電動式移動棚
【課題】構成が簡単で、迅速に順次駆動が行われる電動式移動棚を得る。
【解決手段】複数の移動棚がモータ14の駆動力により移動可能に並べられてなる電動式移動棚システムを構成する個々の電動式移動棚が、駆動源であるモータ14と、モータ14の正逆回転および停止を制御する制御回路10と、を有し、個々の移動棚における制御回路10は、目標とする駆動デューティと現在の駆動デューティを比較するデューティ比較部102を有し、個々の移動棚は、デューティ比較部102による比較結果が現在の駆動デューティより目標とする駆動デューティが大きい場合にモータ14を駆動するモータ駆動回路部13を有してなる。
【解決手段】複数の移動棚がモータ14の駆動力により移動可能に並べられてなる電動式移動棚システムを構成する個々の電動式移動棚が、駆動源であるモータ14と、モータ14の正逆回転および停止を制御する制御回路10と、を有し、個々の移動棚における制御回路10は、目標とする駆動デューティと現在の駆動デューティを比較するデューティ比較部102を有し、個々の移動棚は、デューティ比較部102による比較結果が現在の駆動デューティより目標とする駆動デューティが大きい場合にモータ14を駆動するモータ駆動回路部13を有してなる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、より迅速に通路を形成することができる電動式移動棚に関するものである。
【背景技術】
【0002】
電動式移動棚は、モータを駆動源として走行可能な棚である。電動式移動棚は、これを複数並べて使用され、複数の電動式移動棚を互いに接近させて収束した状態にすることができるとともに、任意の移動棚間に空間を形成してこれを作業用の通路とすることができる。電動式移動棚の駆動方式を大きく分けると、同時駆動方式と順次駆動方式がある。指定された棚と棚との間に作業通路を形成するために複数の棚を移動させる必要がある場合、同時駆動方式は、移動させる必要がある上記複数の棚を同時に駆動する方式であり、順次駆動方式は、移動させる必要がある上記複数の棚を順番に起動していく方式である。
【0003】
同時駆動方式は、所望の移動棚間に作業通路を形成するために駆動スイッチが操作されると、走行すべき移動棚が全て同時に起動されるようにした駆動方式で、単通路方式の電動式移動棚に多く採用されている。作業通路を同時に複数箇所に形成することができる多通路方式の電動式移動棚の多くは、順次駆動方式である。
【0004】
順次駆動方式の電動式移動棚の例として、複数台の移動棚を走行させるとき、走行方向先頭の移動棚を起動した後、後続の移動棚を所定の設定時間をおいて順番に起動し、停止位置での停止は、各棚の間隔が密になるように各棚を制御するものがある(特許文献1参照)。
【0005】
順次駆動方式の電動式移動棚の別の例として、移動対象となる複数の移動棚を、走行方向の最も後ろ側にある移動棚を最初に起動した後、この棚から走行方向前側にある棚を、時間差をあけて順次走行させるように各棚を制御するものがある(特許文献2参照)。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2002−274619号公報
【特許文献2】特開2009−23784号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
順次駆動方式の電動式移動棚は、移動すべき棚が順に起動されるため、棚の移動開始から全ての棚の停止までに要する時間が長くなる難点がある。移動すべき棚の数が多くなればなるほど、棚の移動開始から全ての棚の停止までの所要時間が長くなる。
【0008】
本発明は、従来の順次駆動方式の電動式移動棚に見られるような問題点を解消すること、すなわち、移動すべき移動棚が迅速に起動され、棚の移動開始から全ての棚の停止までの所要時間を短縮することができる電動式移動棚を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明は、
複数の移動棚がモータの駆動力により移動可能に並べられてなる電動式移動棚システムを構成する個々の電動式移動棚が、駆動源であるモータと、このモータの正逆回転および停止を制御する制御回路と、を有し、
個々の移動棚における上記制御回路は、目標とする駆動デューティと現在の駆動デューティを比較するデューティ比較部を有し、
上記個々の移動棚は、上記デューティ比較部による比較結果が現在の駆動デューティより目標とする駆動デューティが大きい場合に上記モータを駆動するモータ駆動回路部を有してなることを最も主要な特徴とする。
【発明の効果】
【0010】
個々の電動式移動棚において、現在の駆動デューティより目標とする駆動デューティが大きい場合にその移動棚のモータを駆動してその移動棚を起動する。移動すべき移動棚は瞬時に移動を開始し、従来の順次駆動式移動棚のように、隣接移動棚が離間するに必要な一定の時間間隔を置いて順に起動するものと比較すると、より迅速に通路を形成することができる。
【図面の簡単な説明】
【0011】
【図1】本発明に係る電動式移動棚の実施例の外観であって複数の移動棚が配置されて例を示す外観側面図である。
【図2】上記実施例における各移動棚の動作例を示すタイミングチャートである。
【図3】上記実施例における各移動棚の機能ブロック図である。
【図4】上記実施例全体の動作例を示すフローチャートである。
【図5】上記実施例の通路形成動作の例を示すフローチャートである。
【図6】上記実施例において複数の移動棚が図1に示す配置とは異なった配置にある状態から所望の位置に通路を形成する場合の動作を順に示す外観側面図である。
【図7】図6に示す配置例において所望の位置に通路を形成する場合の動作を示すタイミングチャートである。
【発明を実施するための形態】
【0012】
以下、本発明に係る電動式移動棚の実施例を、図面を参照しながら説明する。
【実施例】
【0013】
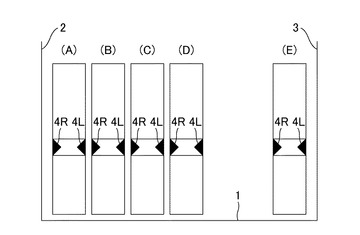
まず、本発明に係る電動式移動棚の実施例の概要を説明する。図1は、5台の電動式移動棚A,B,C,D,Eが床1上に並べられ、これらの移動棚が、床1から互いに平行に立ち上がった壁2,3間に配置されている例を示している。図1は各移動棚の側面を示しており、各移動棚の正面すなわち収納物を出し入れする間口面は図1の紙面に直交する面方向に広がっている。各移動棚は駆動源として直流モータを備えていて、直流モータが駆動されると、図1の紙面と平行な方向でありかつ水平方向に移動して、移動方向前後に隣り合う移動棚が互いに近接しまた離間することができるようになっている。各移動棚の側面の左右両側縁部には、人が立った姿勢で操作しやすい高さ位置に、右側に向かって押圧操作することができる右行き駆動スイッチ4Rと、左側に向かって押圧操作することができる左行き駆動スイッチ4Lが取り付けられている。
【0014】
右行き駆動スイッチ4Rは各移動棚の側面の左側縁部に取り付けられ、この右行き駆動スイッチ4Rが右側に向かって押圧操作されている間は、右側に移行余裕があれば、上記直流モータが駆動されてその移動棚が右側に向かって移動し、右行き駆動スイッチ4Rの押圧を解除することによって上記移動棚が停止するようになっている。左行き駆動スイッチ4Lは各移動棚の側面の右側縁部に取り付けられ、この左行き駆動スイッチ4Lが左側に向かって押圧操作されている間は、左側に移行余裕があれば、上記直流モータが上記駆動の向きとは逆向きに駆動されてその移動棚が左側に向かって移動し、左行き駆動スイッチ4Lの押圧を解除することによって上記移動棚が停止するようになっている。
【0015】
上に述べたような駆動方式の移動棚によれば、操作者の判断によって移動させるべき移動棚と移動方向を決めて操作すればよく、複雑な制御回路を必要とせず、移動棚相互を結ぶケーブルの類を削減することができるため、構成が簡単でローコストの電動式移動棚を得ることができる。本発明の実施例は、上記駆動方式の電動式移動棚において、所望の棚間に作業通路を形成する際の駆動方式に特徴があり、これによって迅速な通路形成動作を可能にしている。
【0016】
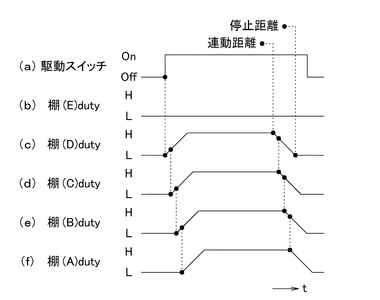
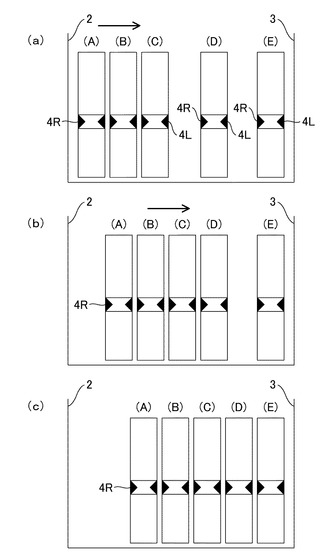
図2は、図1に示すように4台の移動棚A,B,C,Dが左側の壁2の方に向かって収束し、右端の移動棚Eのみが右側の壁3に近接して、移動棚D,E間に作業通路が形成されている状態において、左側の壁2と移動棚A間に作業通路を形成すべく移動棚Aの駆動スイッチ4Rが右に向かって押圧操作されたときの動作を示している。図2(a)は、各移動棚において上記右行き駆動スイッチ4Rの操作によってスイッチがオンし、所望の通路が形成されるまで上記駆動スイッチ4Rが押圧された場合を示している。図2の(b)乃至(f)は各棚の直流モータの駆動状況を示している。
【0017】
各移動棚の直流モータは、モータ駆動回路部によって駆動されるとともに、それぞれの棚の負荷に応じたデューティで駆動され、最大負荷がかかっている棚は「100」近いデューティでその直流モータが駆動される。本願でいう「デューティ」とは、各移動棚においてその時々にモータが発揮すべき能力ないしは出力という意味で、モータがその時々で必要な最大の能力を発揮していれば、そのときのデューティは「100」と定義する。図2の(b)(c)(d)(e)(f)はそれぞれ棚E、棚D、棚C、棚B、棚Aにおける直流モータ駆動のデューティの変化を示している。それぞれのチャートで「H」は、そのときの駆動条件において必要な最大デューティを示しており、モータが備えている最大の能力を発揮しているというわけではない。上記の作業通路形成動作では棚Eは駆動されないので、デューティは「L」のままで変化しない。
【0018】
上記のように、移動棚Aの右行き駆動スイッチ4Rが右に向かって押圧操作されると、全ての棚が駆動状態になり、全ての棚において目標デューティと現在のデューティを比較する。いま、個々の移動棚において、デューティの目標値をDt、移動すべき方向前方の棚との通路幅をWf、停止距離をSd、移動方向前方の棚のデューティをDf、係数をkとすると、デューティの目標値Dtを、以下の式1で求める。
式1
Dt=(Wf−Sd)×k+Df
【0019】
なお、式1に具体的な数値をあてはめると、デューティの目標値Dtが100以上になることがある。例えば、Wf=600、Sd=200、k=0.5、Df=0とすると、
Dt=(600−200)×0.5+0=200
となる。このように、Dtが100以上になる場合は、Dtを「100」とする。
【0020】
次に、デューティの目標値Dtと現在の自己の駆動デューティDiを比較し、
Dt>Di
なら駆動モードに入る。上記「停止距離」とは、棚が移動限界近くに達することによりモータの駆動を停止するときの位置から最終的な停止位置までの距離をいう。棚は駆動停止後慣性で移動して停止位置で停止するので、慣性で移動する距離を見込んで「停止距離」が決められる。
【0021】
図1、図2に示す例で、右の方に十分なスペースがある棚Dの目標デューティは100になるため、Dt>Diとなり、棚Dが駆動モードになって右方に移動を開始する。棚C,B,Aにおいては、移動方向前方の棚のデューティDfが上昇することによりDt>Diとなり、棚C,B,Aはそれぞれ駆動モードとなって右方に移動を開始する。このようにして、移動方向前方の棚のデューティに追随して後続の棚のデューティが上昇し、後続の棚が前方の棚に追随して移動する。
【0022】
このように、電気的な制御動作から見れば、移動すべき方向先頭の棚から順次駆動デューティが上がることによって順次駆動されていくイメージであるが、この駆動制御は瞬時に行われる。このような各移動棚における駆動制御は、各移動棚が備えている制御回路によって行われる。また、上記制御は、移動方向前側の棚の駆動デューティとの関係で一定の条件が成立した時点で行われるようになっていて、この点が本発明の特徴の一つとなっている。
【0023】
図2に示す配置例では、棚Aの右行き駆動スイッチ4Rが操作されることにより、移動すべき棚のうち先頭の棚Dの駆動デューティが図2(c)のように上昇し始めて棚Dの駆動が開始され、最大デューティに達すると、以後最大デューティで駆動される。棚Dの移動方向後ろの棚Cでは、図2(d)のように棚Dの駆動デューティの上昇中に、上記の条件Dt>Diが成立した時点で駆動デューティが上昇し始めて棚Cの駆動が開始され、最大デューティに達した後は継続して最大デューティで駆動される。以下、棚B、Aについても上記の条件Dt>Diが成立した時点で駆動デューティが上昇し始めて駆動が開始され、最大デューティに達した後は継続して最大デューティで駆動される。
【0024】
図2からわかるように、右行き駆動スイッチ4R(または左行き駆動スイッチ4L)が操作されると、移動すべき棚は駆動デューティが上昇しながら駆動されるため、いわゆるスロースタートによって円滑に移動が開始され、収納物に衝撃を与えるようなことはない。
【0025】
上記のように群をなして移動している棚A,B,C,Dのうち先頭の棚Dが、停止している棚Eに一定距離まで接近すると、棚Dの制御回路が駆動デューティを下げ始め、棚Dは制動モードに入る。制動モードに入るときの上記一定距離を図2では「連動距離」として表している。制動モードに入った棚Dは連続的に減速され、前述の停止距離に達すると駆動デューティが「L」(=0)になり、駆動が停止する。棚Dは慣性で移動し、所定の停止位置で停止する。
【0026】
前記目標値Dtと現在の自己の駆動デューティDiの対比は常時行われる。上記のように棚Dの駆動デューティが下がり始めると、その後ろの棚Cの目標デューティDtが下がり、Dt<Diの関係になる。この時点で棚Cも制動モードに入る。同様にして棚Cと棚Bとの関係、棚Bと棚Aとの関係でもDt<Diの関係になり、それぞれの時点で棚B,棚Aの順に制動モードに入る。棚C,棚B,棚Aでは上記棚Dの動作と同様に、停止距離に達することにより駆動が停止され、所定の停止位置で停止する。このように、各棚は停止する際もいわゆるスローストップし、円滑に停止する。
【0027】
上記停止動作は、棚Dが棚Eに接近することによって停止するまで移動棚Aの右行き駆動スイッチ4Rが右に向かって押圧操作され続けた場合の停止動作である。棚Dが棚Eに接近しないうちに棚Aの右行き駆動スイッチ4Rの押圧操作を止めると、まず棚Dが上記のように制動モードに入って停止し、棚C,B,Aも、上記のようにDt<Diの関係になることによって減速し、停止する。各棚D,C,B,Aの減速および停止動作は、見た目にはほとんど同時で、迅速に停止する。こうして各棚の移動が停止した状態では、棚A,Bの間と、棚D,E間に作業通路が形成される。
【0028】
以上の説明からわかるとおり、移動方向先頭の移動棚に移行余裕がなくなって停止するまで駆動スイッチを操作続けてもよいし、複数個所に作業通路を形成しようとする場合は、移動方向先頭の移動棚に移行余裕がなくなる前に駆動スイッチの操作を解除すればよい。したがって、任意の1か所に作業通路を形成することもできるし、任意の複数個所に作業通路を形成することもできる。このように、移動棚相互間で複雑な信号のやり取りを行わなくても、複数個所に作業通路を形成することが可能であり、多通路の形成が可能な電動式移動棚システムを簡単な構成で得ることができる。
【0029】
以上説明した実施例の動作によれば、電気的にはいわゆる順次駆動のような制御が行われるが、個々の移動棚において、進行方向前側の棚の駆動デューティと自己の棚の駆動デューティとを比較しながら制御されるため、移動すべき移動棚は瞬時に移動を開始し、同時駆動と変わりがない。よって、従来の順次駆動方式の電動式移動棚よりも迅速な通路形成が可能になる。
【0030】
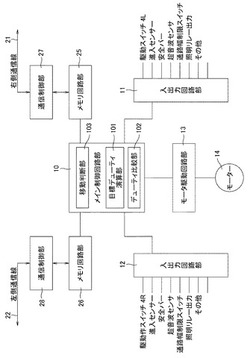
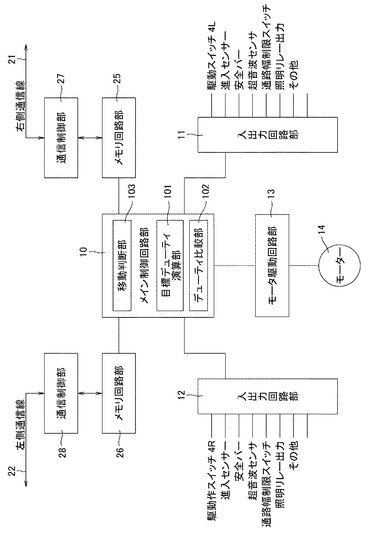
以上説明したような動作を行わせるための制御系統の例を図3に示す。図3において、符号10は各移動棚が備えているメイン制御回路部を示している。メイン制御回路部10はマイクロコンピュータなどからなる。メイン制御回路部10は、前述の式によって目標デューティを演算する目標デューティ演算部101、目標デューティと現在の駆動デューティを比較するデューティ比較部102を有している。各移動棚は、メイン制御回路部10のほか、モータ駆動回路部13と個々の移動棚を駆動するモータ14を有している。モータ駆動回路13は、メイン制御回路部10からの指令によりモータ14を正逆回転制御または停止制御を行い、かつ、回転制御時は指令されたデューティでモータ14を駆動する。本明細書では、「制御回路」という場合、メイン制御回路部10とモータ駆動回路部13を含むものとする。
【0031】
各移動棚は左右の入出力回路部11,12を有している。右側の入出力回路部11は、左行き駆動スイッチ4L、進入センサ、安全バー、超音波センサ、通路幅制限スイッチ、照明リレー出力、その他からの信号を中継してメイン制御回路部10に入力する。同様に、左側の入出力回路部12は、右行き駆動スイッチ4R、進入センサ、安全バー、超音波センサ、通路幅制限スイッチ、照明リレー出力、その他からの信号を中継してメイン制御回路部10に入出力する。
【0032】
上記進入センサとは、移動棚間に形成されている空間に作業者その他が進入していることを検出するセンサである。上記安全バーとは、各移動棚の間口面に、棚板などの前面に沿って設置されていて、作業者などが接触することによって作動するセンサである。上記超音波センサとは、隣の移動棚との離間距離を常時計測する距離センサである。上記通路幅制限装置とは、隣の移動棚との間に形成される通路幅が一定の幅以上にならないように制限する装置である。上記照明リレー出力とは、隣の移動棚との間に所定の幅以上の作業通路が形成されることによって上記作業通路の照明ランプを点灯するためのリレーである。
【0033】
メイン制御回路部10は、このメイン制御回路部10を有している移動棚のモータ14の駆動デューティを検出する機能を備えている。検出された駆動デューティ信号は、両隣の移動棚に向けて出力され、両隣の移動棚からはそれぞれの移動棚で検出された駆動デューティ信号が入力されるようになっている。
【0034】
各移動棚は、右隣の移動棚と通信制御部27を通して信号をやり取りする右側通信線21と、左隣の移動棚と通信制御部28を通して信号をやり取りする左側通信線22を有している。右側の通信制御部27は、メイン制御回路部10からの指令信号によりメモリ回路部25を経て制御される。左側の通信制御部28は、メイン制御回路部10からの指令信号によりメモリ回路部26を経て制御される。メモリ回路部25、26は、各種設定値、時間の経過とともに変化する各種データなどを記憶する。
【0035】
各移動棚に設けられている前記右行き駆動スイッチ4R、左行き駆動スイッチ4Lのオン/オフ信号は、入出力回路部11,12を介してメイン制御回路部10に入力される。メイン制御回路部10は、右行き駆動スイッチ4Rのオンによって右行き信号を生成し、右側信号線21を経て右隣の移動棚に向けて出力する。また、左行き駆動スイッチ4Lのオンによって左行き信号を生成し、左側信号線22を経て左隣の移動棚に向けて出力する。メイン制御回路部10にはまた、左側信号線22を経て左隣の移動棚から出力される右行き信号が入力され、右側信号線21を経て右隣の移動棚から出力される左行き信号が入力されるように構成されている。メイン制御回路部10は、このメイン制御回路部10を有する移動棚が移動すべきか否かを判断する移動判断部103を備えている。この移動判断部103は、移動判断部103が設けられている移動棚の駆動スイッチが操作された場合、または、隣接棚が一定の距離まで接近してきた場合に、その移動棚が移動すべきであると判断する。
【0036】
各移動棚は、左隣の移動棚との距離を常時検出する前記超音波センサと、右隣の移動棚との距離を常時検出する前記超音波センサを備えていて、各超音波センサの検出信号すなわち距離信号はメイン制御回路部10内の移動判断部103に入力されるように構成されている。上記各超音波センサは、例えば、一定の時間間隔で隣の移動棚に向けて超音波を発射し、隣の移動棚で反射されて返ってくる時間を計測することによって隣の移動棚との離間距離を計測する距離計を構成している。上記超音波センサの検出信号は、上記移動判断部103に入力され、その移動棚が移動すべきか否かの判断に供される。
【0037】
超音波センサを用いた距離計に代えてレーダー式距離計などを用いてもよい。図3に示す例では、左右それぞれに超音波距離センサを備えているが、互いに隣り合う二つの棚間の距離を測定する一つの距離センサの検出信号を上記二つの棚で共有するようにすれば、一つの移動棚に一つの距離センサを配置することで足りる。その場合、隣り合う二つの移動棚間を結ぶケーブルを付加する必要がある。
【0038】
各移動棚には、モータ駆動用の電源と制御回路を動作させるための電源が供給される。
【0039】
以上説明した実施例の動作を説明する。それぞれのフローチャートにおいて、各動作ステップをS1、S2、S3・・・のように表す。
【0040】
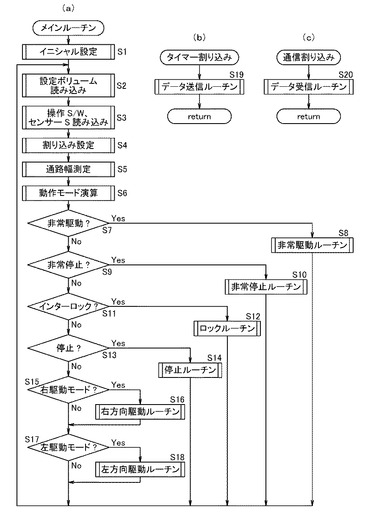
図4は本実施例に係る電動式移動棚全体の動作の概略を示す。図4(a)はメインルーチンを示す。図4(a)に示すように、メインルーチンにおいては先ずイニシャル設定が行われる(S1)。イニシャル設定とは、各種係数、停止距離、その他所定のデータを、動作開始に先駆けて設定することである。次に、設定ボリウム読み込み(S2)、駆動スイッチ、センサ読み込み(S3)、割り込み設定(S4)、通路幅測定(S5)、動作モード演算(S6)の順に進む。上記割り込み設定(S4)には、タイマー割り込みと通信割り込みがある。タイマー割り込みでは、図4(b)に示すようにデータ送信ルーチン(S19)が実行され、通信割り込みでは、図4(c)に示すようにデータ受信ルーチンが実行される。上記通路幅測定(S5)では、前記超音波センサにより隣の移動棚との離間距離が測定される。上記動作モード演算(S6)では、加速モードか、一定速度モードか、制動モードか、等々を判別する演算が行われる。
【0041】
次に、非常駆動かどうかの判断が行われ(S7)、非常駆動であれば非常駆動ルーチン(S8)が実行される。非常駆動とは、次に説明する非常停止などによって移動棚が停止してしまった場合に、通常の動作を行わせる場合とは異なった操作によって強制的に移動棚を駆動することをいう。非常駆動でなければ非常停止かどうかを判断し(S9)、非常停止であれば非常停止ルーチン(S10)を実行する。非常停止とは、例えば、前記安全バーが動作した場合に移動棚の移動を緊急停止させることをいう。
【0042】
非常停止かどうかの判断ステップ(S9)で、非常停止でなければ、次にインターロックか否かの判断ステップ(S11)に行く。インターロックとは、通常の作業通路形成動作による通路形成動作が完了したときなどに、別の場所に通路を形成する操作が行われても、移動棚が移動することができないように回路的にロックすることである。インターロックがかかると、これを解除する操作が行われるまでインターロックが維持される。インターロックがかけられていれば、インターロックルーチン(S12)が実行される。
【0043】
インターロックがかけられていないときは、停止か否かの判断ステップ(S13)に行く。停止か否かとは、移動棚が停止すべき位置まで走行したか否かということであって、停止と判断された場合は停止ルーチン(S14)が実行される。上記ステップS13で停止でないと判断された場合は、右駆動モードか否か(S15)を判断し、右駆動モードでなければ左駆動モードか否か(S17)を判断する。ステップS15で右駆動モードと判断されると右方向駆動ルーチン(S16)が実行され、ステップS16で左駆動モードと判断されると左方向駆動ルーチン(S18)が実行される。
【0044】
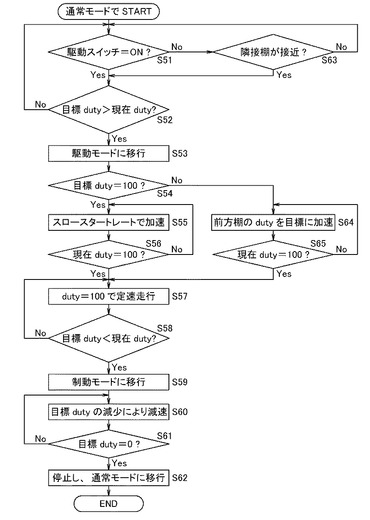
本発明の実施例は、個々の電動式移動棚において、上記右駆動モードあるいは左駆動モードでの起動時の動作、さらには停止時の動作に、図2とともに説明したような特徴がある。図5は、この特徴ある通常モードでの動作を示す。上記起動時の動作、さらには停止時の動作の特徴は、右駆動モードかまたは左駆動モードかには無関係であるから、図5では右駆動モードと左駆動モードの区別はしていない。本発明の一つの特徴は、個々の移動棚において個別に移動すべきか否か、どの向きに移動すべきかを判断し、この判断のもとに移動、停止を制御する点にある。以下に説明する図5の動作は、個々の移動棚において個別に行われる。
【0045】
図5において、まず、駆動スイッチがオンか否かを判断する(S51)。駆動スイッチとは、図3に示す左右の駆動スイッチ4R,4Lのことである。駆動スイッチすなわち左右の駆動スイッチ4R,4Lの何れかが操作されていると、「目標デューティ>現在デューティか否か」、すなわちDt>Diか否かの判断ステップ(S52)に進む。ステップS51で駆動スイッチすなわち左右の駆動スイッチ4R,4Lの何れも操作されていない場合は、隣接棚が接近しているか否かの判断ステップ(S63)に進む。このステップS63で隣接棚が接近していないと判断されると、ステップS51に戻る。ステップS63で隣接棚が接近していると判断された場合は、上記「目標デューティ>現在デューティか否か」の判断ステップ(S52)に進む。上記ステップS63で隣接棚が接近していると判断される場合の動作については後で具体的な例を挙げて説明する。
【0046】
ステップS52の「目標デューティ>現在デューティ」が成立するのは、移動すべき方向前方に停止距離よりも長い(広い)通路がある場合、または、前方の移動棚が連動距離内にありかつこの前方の移動棚が移動することができる状態にある場合である。ステップS52において「目標デューティ>現在デューティ」であれば、図2について説明した通り、駆動モードに移行し(S53)、前記モータ駆動回路部13によってモータ14を駆動する。駆動モードに移行した後「目標デューティ=100か否か」の判断ステップ(S54)に進む。「目標デューティ=100」とは、図2について説明した通り、目標デューティが最大デューティであるということである。「目標デューティ=100」であれば、次の「スロースタートで加速」ステップ(S55)に進み、当初低い駆動デューティでモータ14を起動し、駆動デューティを順次高めることによってモータ14の回転速度を上げていく。
【0047】
次に、「現在デューティ=100か否か」の判断ステップ(S56)に進む。「現在デューティ=100」であれば、デューティ100で定速走行し(S57)、「現在デューティ=100」でなければ、「スロースタートで加速」ステップ(S55)に戻り、加速し続ける。
【0048】
ステップS54で「目標デューティ=100」ではないと判断された場合は、前方の移動棚のデューティを目標に加速し(S64)、「現在デューティ=100か否かを判断する(S65)。「現在デューティ=100」であれば、ステップS57に進んでデューティ100を維持して定速走行する。
【0049】
ステップS57で定速走行しているとき、「目標デューティ<現在デューティか否か」を判断する(S58)。「目標デューティ<現在デューティ」が成立しない場合は、デューティ100で定速走行(S57)を続行する。「目標デューティ<現在デューティ」が成立するのは、移動方向前方に隣り合う移動棚のデューティが下がることに倣ってデューティが下がることによる。デューティが下がり、「目標デューティ<現在デューティ」が成立すると制動モードに移行する(S59)。
【0050】
制動モードに移行した後は、目標デューティの減少に伴って減速される(S60)。この減速動作は、駆動デューティが「0」になって、移動棚が停止するまで実行される。すなわち、上記減速動作を実行して、「目標デューティ=0か否か」を判断し(S61)、「目標デューティ=0」であれば、一連の動作を停止して通常モードに移行し(S62)、「目標デューティ=0」でなければ、目標デューティの減少に伴う減速動作(S60)を続行する。前方の移動棚が停止位置に近づくにしたがい目標デューティが減少し、前方の移動棚が停止距離に達して停止した場合に「目標デューティ=0」が成立する。本実施例では、制動モードに移行後、ステップS60で「目標デューティの減少により減速」しているが、予め定められている「スローストップレート」で減速するようにしてもよい。
【0051】
以上のように制御される電動式移動棚によれば、個々の移動棚において、駆動スイッチすなわち左右の駆動スイッチ4R,4Lの何れかが操作され、右または左に移動スペースがあると右または左に移動する。移動スペースがなくなれば移動を停止する。このようにして、任意の移動棚で右行きまたは左行き駆動スイッチが操作されると、移動すべきか否か、移動している場合どこで停止するかの判断は個々の移動棚によって行うため、移動棚相互間で交換する制御信号が単純で、移動棚相互間をつなぐワイヤの類を少なくすることができる利点がある。
【0052】
また、図示した実施例に係る電動式移動棚によれば、移動方向前方の移動棚の駆動デューティが上昇すると、これに倣って移動方向後方の移動棚の駆動デューティも上昇する。この駆動デューティが予め設定した値を超えると、上記前方の移動棚に続く後方の移動棚のモータ14にも給電されてモータ14を駆動するとともに、モータ14の駆動デューティを連続的に上昇させる。このような駆動デューティを連続的に変化させることによる移動棚の速度制御は、移動させるべきすべての移動棚において個別に行われる。しかしながら、移動すべき移動棚はほとんど同時に一群となって移動するため、所定位置への作業通路の形成が迅速に行われる。
【0053】
次に、図5のステップS63の隣接棚が接近してきたか否かの判断動作について、具体的な例を挙げて説明する。この動作が有効になるのは図6に示すように複数の通路が形成されている場合において、いずれかの棚の駆動スイッチが操作された場合である。いま、図6(a)に示すように、相対向する左右の壁2,3間に5台の移動棚A,B,C,D,Eが並べられ、棚CとDの間および棚DとEの間にそれぞれ通路が形成されている状態にあるものとする。すなわち、棚A、B間および棚B、C間にはごく僅かなスペースが、棚C、D間および棚D、E間には大きなスペースが、壁2と棚A間および壁3と棚E間にはごく僅かなスペースが形成されているものとする。この状態で、左端の棚Aと壁2との間に通路を形成するために棚Aの駆動スイッチ4Rを右方に押したとする。
【0054】
上記駆動スイッチ4Rが押されると、棚A,B,Cが駆動状態になり、右の方に十分なスペースがある棚Cの目標デューティが100になり、Dt>Diとなることによって、棚Cが駆動モードになり右方に移動を開始する。このときの各棚の駆動デューティは以下のとおりである。
【0055】
<棚Cの駆動デューティ>
棚Cの目標デューティDtは前述のように100である。これを前記式1にあてはめると、
(Wf−Sd)×k+Df≧100
であるから、前述のように、
Dt=100
とする。
【0056】
<棚Bの駆動デューティ>
Wf−Sd=0
である。これを前記式1にあてはめると、
Dt=Df
となる。このときのDfは、棚Cのデューティであるから、棚Bのデューティも棚CのデューティDfに倣って100になる。
【0057】
<棚Aの駆動デューティ>
Wf−Sd=0
である。これを前記式1にあてはめると、
Dt=Df
このときのDfは、棚Bのデューティであるから、棚Aのデューティも棚BのデューティDfに倣って100になる。
【0058】
<棚D・Eの駆動デューティ>
棚Dおよび棚Eは駆動信号を受け取っていないため、Dt=0である。
【0059】
上記のように、棚B,Aにおいては、移動方向前方の棚CのデューティDfが大きくなることによりDt>Diとなり、棚B,Aが駆動モードとなって右方に移動を開始する。このようにして、移動方向前方の棚Cのデューティに追随して後続の棚B,Aのデューティが大きくなり、後続の棚B,Aが前方の棚Cに追随して移動する。
【0060】
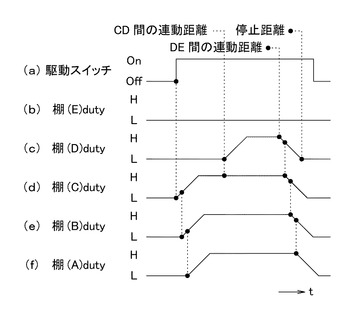
棚C,B,Aの移動により、図6(b)に示すように棚Cが棚Dに一定距離まで接近すると、棚Dでは、図5に示すステップS63において棚Cの接近を検出し、図5に示すステップS52に進む。上記棚Cが棚Dに「一定距離まで接近」という場合の「一定距離」とは、図7に示すように、棚C、D間の「連動距離」のことである。棚Cが棚Dに連動距離まで接近すると、棚Dの右側には十分なスペースがあるため、棚Dの目標デューティが100になり、Dt>Diとなることによって、棚Dが駆動モードになり右方に移動を開始する。このようにして、棚Aから棚Dまでが一塊となって右方にデューティ100で定速走行する。
【0061】
棚Dが棚Eに接近すると、棚Eは右側に移動スペースがなく右側に移動することができないため、棚Eの駆動デューティは0のままであり、棚Eに所定の連動距離以下に接近した棚Dの駆動デューティの目標値Dtが下がる。これを前記式1
Dt=(Wf−Sd)×k+Df
にあてはめると、Df=0であるから、棚Dにおいて「Dt<Di」が成立するまでは、すなわち、「Dt>Di」の間は、
(Wf−Sd)×k≧0
であり、棚Dでは棚Eとの距離を見ながら駆動デューティの目標値Dtが小さくなっていく。そして、棚Dにおいて「Dt<Di」が成立すると、図5にステップS59で示す制動モードに移行して、スローストップレートで減速し(S60)、目標デューティが0になると(S62のYes)走行を停止する(S62)。
【0062】
棚Dの上記デューティの降下、制動モードへの移行、スローストップレートでの減速、停止という動作が、棚Dに追随して走行している棚C,B,Aにおいても同様に行われ、図6(c)に示すように、すべての棚A乃至Eが右方に収束し、棚Aと壁2との間に作業通路が形成されて一連の動作を終わる。
【0063】
本発明の実施例によれば、使用者の意図に応じて複数個所に作業通路を形成することができる電動式移動棚システムを簡単な構成で実現することができとともに、多通路形成時において別の位置に作業通路を形成しようとする場合の動作の迅速化を図ることができる。
【産業上の利用可能性】
【0064】
本発明に係る電動式移動棚は、小規模の移動棚装置から大規模の移動棚装置まで、あらゆる規模の移動棚装置に適用可能である。
本発明に係る電動式移動棚によれば、作業者の意図によって、単通路方式の移動棚としても、多通路方式の移動棚としても使用可能であり、多通路を可能にするための特別な構成を付加する必要はない。
【符号の説明】
【0065】
4R 駆動スイッチ
4L 駆動スイッチ
10 メイン制御回路部
12 入出力回路部
13 モータ駆動回路部
14 モータ
【技術分野】
【0001】
本発明は、より迅速に通路を形成することができる電動式移動棚に関するものである。
【背景技術】
【0002】
電動式移動棚は、モータを駆動源として走行可能な棚である。電動式移動棚は、これを複数並べて使用され、複数の電動式移動棚を互いに接近させて収束した状態にすることができるとともに、任意の移動棚間に空間を形成してこれを作業用の通路とすることができる。電動式移動棚の駆動方式を大きく分けると、同時駆動方式と順次駆動方式がある。指定された棚と棚との間に作業通路を形成するために複数の棚を移動させる必要がある場合、同時駆動方式は、移動させる必要がある上記複数の棚を同時に駆動する方式であり、順次駆動方式は、移動させる必要がある上記複数の棚を順番に起動していく方式である。
【0003】
同時駆動方式は、所望の移動棚間に作業通路を形成するために駆動スイッチが操作されると、走行すべき移動棚が全て同時に起動されるようにした駆動方式で、単通路方式の電動式移動棚に多く採用されている。作業通路を同時に複数箇所に形成することができる多通路方式の電動式移動棚の多くは、順次駆動方式である。
【0004】
順次駆動方式の電動式移動棚の例として、複数台の移動棚を走行させるとき、走行方向先頭の移動棚を起動した後、後続の移動棚を所定の設定時間をおいて順番に起動し、停止位置での停止は、各棚の間隔が密になるように各棚を制御するものがある(特許文献1参照)。
【0005】
順次駆動方式の電動式移動棚の別の例として、移動対象となる複数の移動棚を、走行方向の最も後ろ側にある移動棚を最初に起動した後、この棚から走行方向前側にある棚を、時間差をあけて順次走行させるように各棚を制御するものがある(特許文献2参照)。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2002−274619号公報
【特許文献2】特開2009−23784号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
順次駆動方式の電動式移動棚は、移動すべき棚が順に起動されるため、棚の移動開始から全ての棚の停止までに要する時間が長くなる難点がある。移動すべき棚の数が多くなればなるほど、棚の移動開始から全ての棚の停止までの所要時間が長くなる。
【0008】
本発明は、従来の順次駆動方式の電動式移動棚に見られるような問題点を解消すること、すなわち、移動すべき移動棚が迅速に起動され、棚の移動開始から全ての棚の停止までの所要時間を短縮することができる電動式移動棚を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明は、
複数の移動棚がモータの駆動力により移動可能に並べられてなる電動式移動棚システムを構成する個々の電動式移動棚が、駆動源であるモータと、このモータの正逆回転および停止を制御する制御回路と、を有し、
個々の移動棚における上記制御回路は、目標とする駆動デューティと現在の駆動デューティを比較するデューティ比較部を有し、
上記個々の移動棚は、上記デューティ比較部による比較結果が現在の駆動デューティより目標とする駆動デューティが大きい場合に上記モータを駆動するモータ駆動回路部を有してなることを最も主要な特徴とする。
【発明の効果】
【0010】
個々の電動式移動棚において、現在の駆動デューティより目標とする駆動デューティが大きい場合にその移動棚のモータを駆動してその移動棚を起動する。移動すべき移動棚は瞬時に移動を開始し、従来の順次駆動式移動棚のように、隣接移動棚が離間するに必要な一定の時間間隔を置いて順に起動するものと比較すると、より迅速に通路を形成することができる。
【図面の簡単な説明】
【0011】
【図1】本発明に係る電動式移動棚の実施例の外観であって複数の移動棚が配置されて例を示す外観側面図である。
【図2】上記実施例における各移動棚の動作例を示すタイミングチャートである。
【図3】上記実施例における各移動棚の機能ブロック図である。
【図4】上記実施例全体の動作例を示すフローチャートである。
【図5】上記実施例の通路形成動作の例を示すフローチャートである。
【図6】上記実施例において複数の移動棚が図1に示す配置とは異なった配置にある状態から所望の位置に通路を形成する場合の動作を順に示す外観側面図である。
【図7】図6に示す配置例において所望の位置に通路を形成する場合の動作を示すタイミングチャートである。
【発明を実施するための形態】
【0012】
以下、本発明に係る電動式移動棚の実施例を、図面を参照しながら説明する。
【実施例】
【0013】
まず、本発明に係る電動式移動棚の実施例の概要を説明する。図1は、5台の電動式移動棚A,B,C,D,Eが床1上に並べられ、これらの移動棚が、床1から互いに平行に立ち上がった壁2,3間に配置されている例を示している。図1は各移動棚の側面を示しており、各移動棚の正面すなわち収納物を出し入れする間口面は図1の紙面に直交する面方向に広がっている。各移動棚は駆動源として直流モータを備えていて、直流モータが駆動されると、図1の紙面と平行な方向でありかつ水平方向に移動して、移動方向前後に隣り合う移動棚が互いに近接しまた離間することができるようになっている。各移動棚の側面の左右両側縁部には、人が立った姿勢で操作しやすい高さ位置に、右側に向かって押圧操作することができる右行き駆動スイッチ4Rと、左側に向かって押圧操作することができる左行き駆動スイッチ4Lが取り付けられている。
【0014】
右行き駆動スイッチ4Rは各移動棚の側面の左側縁部に取り付けられ、この右行き駆動スイッチ4Rが右側に向かって押圧操作されている間は、右側に移行余裕があれば、上記直流モータが駆動されてその移動棚が右側に向かって移動し、右行き駆動スイッチ4Rの押圧を解除することによって上記移動棚が停止するようになっている。左行き駆動スイッチ4Lは各移動棚の側面の右側縁部に取り付けられ、この左行き駆動スイッチ4Lが左側に向かって押圧操作されている間は、左側に移行余裕があれば、上記直流モータが上記駆動の向きとは逆向きに駆動されてその移動棚が左側に向かって移動し、左行き駆動スイッチ4Lの押圧を解除することによって上記移動棚が停止するようになっている。
【0015】
上に述べたような駆動方式の移動棚によれば、操作者の判断によって移動させるべき移動棚と移動方向を決めて操作すればよく、複雑な制御回路を必要とせず、移動棚相互を結ぶケーブルの類を削減することができるため、構成が簡単でローコストの電動式移動棚を得ることができる。本発明の実施例は、上記駆動方式の電動式移動棚において、所望の棚間に作業通路を形成する際の駆動方式に特徴があり、これによって迅速な通路形成動作を可能にしている。
【0016】
図2は、図1に示すように4台の移動棚A,B,C,Dが左側の壁2の方に向かって収束し、右端の移動棚Eのみが右側の壁3に近接して、移動棚D,E間に作業通路が形成されている状態において、左側の壁2と移動棚A間に作業通路を形成すべく移動棚Aの駆動スイッチ4Rが右に向かって押圧操作されたときの動作を示している。図2(a)は、各移動棚において上記右行き駆動スイッチ4Rの操作によってスイッチがオンし、所望の通路が形成されるまで上記駆動スイッチ4Rが押圧された場合を示している。図2の(b)乃至(f)は各棚の直流モータの駆動状況を示している。
【0017】
各移動棚の直流モータは、モータ駆動回路部によって駆動されるとともに、それぞれの棚の負荷に応じたデューティで駆動され、最大負荷がかかっている棚は「100」近いデューティでその直流モータが駆動される。本願でいう「デューティ」とは、各移動棚においてその時々にモータが発揮すべき能力ないしは出力という意味で、モータがその時々で必要な最大の能力を発揮していれば、そのときのデューティは「100」と定義する。図2の(b)(c)(d)(e)(f)はそれぞれ棚E、棚D、棚C、棚B、棚Aにおける直流モータ駆動のデューティの変化を示している。それぞれのチャートで「H」は、そのときの駆動条件において必要な最大デューティを示しており、モータが備えている最大の能力を発揮しているというわけではない。上記の作業通路形成動作では棚Eは駆動されないので、デューティは「L」のままで変化しない。
【0018】
上記のように、移動棚Aの右行き駆動スイッチ4Rが右に向かって押圧操作されると、全ての棚が駆動状態になり、全ての棚において目標デューティと現在のデューティを比較する。いま、個々の移動棚において、デューティの目標値をDt、移動すべき方向前方の棚との通路幅をWf、停止距離をSd、移動方向前方の棚のデューティをDf、係数をkとすると、デューティの目標値Dtを、以下の式1で求める。
式1
Dt=(Wf−Sd)×k+Df
【0019】
なお、式1に具体的な数値をあてはめると、デューティの目標値Dtが100以上になることがある。例えば、Wf=600、Sd=200、k=0.5、Df=0とすると、
Dt=(600−200)×0.5+0=200
となる。このように、Dtが100以上になる場合は、Dtを「100」とする。
【0020】
次に、デューティの目標値Dtと現在の自己の駆動デューティDiを比較し、
Dt>Di
なら駆動モードに入る。上記「停止距離」とは、棚が移動限界近くに達することによりモータの駆動を停止するときの位置から最終的な停止位置までの距離をいう。棚は駆動停止後慣性で移動して停止位置で停止するので、慣性で移動する距離を見込んで「停止距離」が決められる。
【0021】
図1、図2に示す例で、右の方に十分なスペースがある棚Dの目標デューティは100になるため、Dt>Diとなり、棚Dが駆動モードになって右方に移動を開始する。棚C,B,Aにおいては、移動方向前方の棚のデューティDfが上昇することによりDt>Diとなり、棚C,B,Aはそれぞれ駆動モードとなって右方に移動を開始する。このようにして、移動方向前方の棚のデューティに追随して後続の棚のデューティが上昇し、後続の棚が前方の棚に追随して移動する。
【0022】
このように、電気的な制御動作から見れば、移動すべき方向先頭の棚から順次駆動デューティが上がることによって順次駆動されていくイメージであるが、この駆動制御は瞬時に行われる。このような各移動棚における駆動制御は、各移動棚が備えている制御回路によって行われる。また、上記制御は、移動方向前側の棚の駆動デューティとの関係で一定の条件が成立した時点で行われるようになっていて、この点が本発明の特徴の一つとなっている。
【0023】
図2に示す配置例では、棚Aの右行き駆動スイッチ4Rが操作されることにより、移動すべき棚のうち先頭の棚Dの駆動デューティが図2(c)のように上昇し始めて棚Dの駆動が開始され、最大デューティに達すると、以後最大デューティで駆動される。棚Dの移動方向後ろの棚Cでは、図2(d)のように棚Dの駆動デューティの上昇中に、上記の条件Dt>Diが成立した時点で駆動デューティが上昇し始めて棚Cの駆動が開始され、最大デューティに達した後は継続して最大デューティで駆動される。以下、棚B、Aについても上記の条件Dt>Diが成立した時点で駆動デューティが上昇し始めて駆動が開始され、最大デューティに達した後は継続して最大デューティで駆動される。
【0024】
図2からわかるように、右行き駆動スイッチ4R(または左行き駆動スイッチ4L)が操作されると、移動すべき棚は駆動デューティが上昇しながら駆動されるため、いわゆるスロースタートによって円滑に移動が開始され、収納物に衝撃を与えるようなことはない。
【0025】
上記のように群をなして移動している棚A,B,C,Dのうち先頭の棚Dが、停止している棚Eに一定距離まで接近すると、棚Dの制御回路が駆動デューティを下げ始め、棚Dは制動モードに入る。制動モードに入るときの上記一定距離を図2では「連動距離」として表している。制動モードに入った棚Dは連続的に減速され、前述の停止距離に達すると駆動デューティが「L」(=0)になり、駆動が停止する。棚Dは慣性で移動し、所定の停止位置で停止する。
【0026】
前記目標値Dtと現在の自己の駆動デューティDiの対比は常時行われる。上記のように棚Dの駆動デューティが下がり始めると、その後ろの棚Cの目標デューティDtが下がり、Dt<Diの関係になる。この時点で棚Cも制動モードに入る。同様にして棚Cと棚Bとの関係、棚Bと棚Aとの関係でもDt<Diの関係になり、それぞれの時点で棚B,棚Aの順に制動モードに入る。棚C,棚B,棚Aでは上記棚Dの動作と同様に、停止距離に達することにより駆動が停止され、所定の停止位置で停止する。このように、各棚は停止する際もいわゆるスローストップし、円滑に停止する。
【0027】
上記停止動作は、棚Dが棚Eに接近することによって停止するまで移動棚Aの右行き駆動スイッチ4Rが右に向かって押圧操作され続けた場合の停止動作である。棚Dが棚Eに接近しないうちに棚Aの右行き駆動スイッチ4Rの押圧操作を止めると、まず棚Dが上記のように制動モードに入って停止し、棚C,B,Aも、上記のようにDt<Diの関係になることによって減速し、停止する。各棚D,C,B,Aの減速および停止動作は、見た目にはほとんど同時で、迅速に停止する。こうして各棚の移動が停止した状態では、棚A,Bの間と、棚D,E間に作業通路が形成される。
【0028】
以上の説明からわかるとおり、移動方向先頭の移動棚に移行余裕がなくなって停止するまで駆動スイッチを操作続けてもよいし、複数個所に作業通路を形成しようとする場合は、移動方向先頭の移動棚に移行余裕がなくなる前に駆動スイッチの操作を解除すればよい。したがって、任意の1か所に作業通路を形成することもできるし、任意の複数個所に作業通路を形成することもできる。このように、移動棚相互間で複雑な信号のやり取りを行わなくても、複数個所に作業通路を形成することが可能であり、多通路の形成が可能な電動式移動棚システムを簡単な構成で得ることができる。
【0029】
以上説明した実施例の動作によれば、電気的にはいわゆる順次駆動のような制御が行われるが、個々の移動棚において、進行方向前側の棚の駆動デューティと自己の棚の駆動デューティとを比較しながら制御されるため、移動すべき移動棚は瞬時に移動を開始し、同時駆動と変わりがない。よって、従来の順次駆動方式の電動式移動棚よりも迅速な通路形成が可能になる。
【0030】
以上説明したような動作を行わせるための制御系統の例を図3に示す。図3において、符号10は各移動棚が備えているメイン制御回路部を示している。メイン制御回路部10はマイクロコンピュータなどからなる。メイン制御回路部10は、前述の式によって目標デューティを演算する目標デューティ演算部101、目標デューティと現在の駆動デューティを比較するデューティ比較部102を有している。各移動棚は、メイン制御回路部10のほか、モータ駆動回路部13と個々の移動棚を駆動するモータ14を有している。モータ駆動回路13は、メイン制御回路部10からの指令によりモータ14を正逆回転制御または停止制御を行い、かつ、回転制御時は指令されたデューティでモータ14を駆動する。本明細書では、「制御回路」という場合、メイン制御回路部10とモータ駆動回路部13を含むものとする。
【0031】
各移動棚は左右の入出力回路部11,12を有している。右側の入出力回路部11は、左行き駆動スイッチ4L、進入センサ、安全バー、超音波センサ、通路幅制限スイッチ、照明リレー出力、その他からの信号を中継してメイン制御回路部10に入力する。同様に、左側の入出力回路部12は、右行き駆動スイッチ4R、進入センサ、安全バー、超音波センサ、通路幅制限スイッチ、照明リレー出力、その他からの信号を中継してメイン制御回路部10に入出力する。
【0032】
上記進入センサとは、移動棚間に形成されている空間に作業者その他が進入していることを検出するセンサである。上記安全バーとは、各移動棚の間口面に、棚板などの前面に沿って設置されていて、作業者などが接触することによって作動するセンサである。上記超音波センサとは、隣の移動棚との離間距離を常時計測する距離センサである。上記通路幅制限装置とは、隣の移動棚との間に形成される通路幅が一定の幅以上にならないように制限する装置である。上記照明リレー出力とは、隣の移動棚との間に所定の幅以上の作業通路が形成されることによって上記作業通路の照明ランプを点灯するためのリレーである。
【0033】
メイン制御回路部10は、このメイン制御回路部10を有している移動棚のモータ14の駆動デューティを検出する機能を備えている。検出された駆動デューティ信号は、両隣の移動棚に向けて出力され、両隣の移動棚からはそれぞれの移動棚で検出された駆動デューティ信号が入力されるようになっている。
【0034】
各移動棚は、右隣の移動棚と通信制御部27を通して信号をやり取りする右側通信線21と、左隣の移動棚と通信制御部28を通して信号をやり取りする左側通信線22を有している。右側の通信制御部27は、メイン制御回路部10からの指令信号によりメモリ回路部25を経て制御される。左側の通信制御部28は、メイン制御回路部10からの指令信号によりメモリ回路部26を経て制御される。メモリ回路部25、26は、各種設定値、時間の経過とともに変化する各種データなどを記憶する。
【0035】
各移動棚に設けられている前記右行き駆動スイッチ4R、左行き駆動スイッチ4Lのオン/オフ信号は、入出力回路部11,12を介してメイン制御回路部10に入力される。メイン制御回路部10は、右行き駆動スイッチ4Rのオンによって右行き信号を生成し、右側信号線21を経て右隣の移動棚に向けて出力する。また、左行き駆動スイッチ4Lのオンによって左行き信号を生成し、左側信号線22を経て左隣の移動棚に向けて出力する。メイン制御回路部10にはまた、左側信号線22を経て左隣の移動棚から出力される右行き信号が入力され、右側信号線21を経て右隣の移動棚から出力される左行き信号が入力されるように構成されている。メイン制御回路部10は、このメイン制御回路部10を有する移動棚が移動すべきか否かを判断する移動判断部103を備えている。この移動判断部103は、移動判断部103が設けられている移動棚の駆動スイッチが操作された場合、または、隣接棚が一定の距離まで接近してきた場合に、その移動棚が移動すべきであると判断する。
【0036】
各移動棚は、左隣の移動棚との距離を常時検出する前記超音波センサと、右隣の移動棚との距離を常時検出する前記超音波センサを備えていて、各超音波センサの検出信号すなわち距離信号はメイン制御回路部10内の移動判断部103に入力されるように構成されている。上記各超音波センサは、例えば、一定の時間間隔で隣の移動棚に向けて超音波を発射し、隣の移動棚で反射されて返ってくる時間を計測することによって隣の移動棚との離間距離を計測する距離計を構成している。上記超音波センサの検出信号は、上記移動判断部103に入力され、その移動棚が移動すべきか否かの判断に供される。
【0037】
超音波センサを用いた距離計に代えてレーダー式距離計などを用いてもよい。図3に示す例では、左右それぞれに超音波距離センサを備えているが、互いに隣り合う二つの棚間の距離を測定する一つの距離センサの検出信号を上記二つの棚で共有するようにすれば、一つの移動棚に一つの距離センサを配置することで足りる。その場合、隣り合う二つの移動棚間を結ぶケーブルを付加する必要がある。
【0038】
各移動棚には、モータ駆動用の電源と制御回路を動作させるための電源が供給される。
【0039】
以上説明した実施例の動作を説明する。それぞれのフローチャートにおいて、各動作ステップをS1、S2、S3・・・のように表す。
【0040】
図4は本実施例に係る電動式移動棚全体の動作の概略を示す。図4(a)はメインルーチンを示す。図4(a)に示すように、メインルーチンにおいては先ずイニシャル設定が行われる(S1)。イニシャル設定とは、各種係数、停止距離、その他所定のデータを、動作開始に先駆けて設定することである。次に、設定ボリウム読み込み(S2)、駆動スイッチ、センサ読み込み(S3)、割り込み設定(S4)、通路幅測定(S5)、動作モード演算(S6)の順に進む。上記割り込み設定(S4)には、タイマー割り込みと通信割り込みがある。タイマー割り込みでは、図4(b)に示すようにデータ送信ルーチン(S19)が実行され、通信割り込みでは、図4(c)に示すようにデータ受信ルーチンが実行される。上記通路幅測定(S5)では、前記超音波センサにより隣の移動棚との離間距離が測定される。上記動作モード演算(S6)では、加速モードか、一定速度モードか、制動モードか、等々を判別する演算が行われる。
【0041】
次に、非常駆動かどうかの判断が行われ(S7)、非常駆動であれば非常駆動ルーチン(S8)が実行される。非常駆動とは、次に説明する非常停止などによって移動棚が停止してしまった場合に、通常の動作を行わせる場合とは異なった操作によって強制的に移動棚を駆動することをいう。非常駆動でなければ非常停止かどうかを判断し(S9)、非常停止であれば非常停止ルーチン(S10)を実行する。非常停止とは、例えば、前記安全バーが動作した場合に移動棚の移動を緊急停止させることをいう。
【0042】
非常停止かどうかの判断ステップ(S9)で、非常停止でなければ、次にインターロックか否かの判断ステップ(S11)に行く。インターロックとは、通常の作業通路形成動作による通路形成動作が完了したときなどに、別の場所に通路を形成する操作が行われても、移動棚が移動することができないように回路的にロックすることである。インターロックがかかると、これを解除する操作が行われるまでインターロックが維持される。インターロックがかけられていれば、インターロックルーチン(S12)が実行される。
【0043】
インターロックがかけられていないときは、停止か否かの判断ステップ(S13)に行く。停止か否かとは、移動棚が停止すべき位置まで走行したか否かということであって、停止と判断された場合は停止ルーチン(S14)が実行される。上記ステップS13で停止でないと判断された場合は、右駆動モードか否か(S15)を判断し、右駆動モードでなければ左駆動モードか否か(S17)を判断する。ステップS15で右駆動モードと判断されると右方向駆動ルーチン(S16)が実行され、ステップS16で左駆動モードと判断されると左方向駆動ルーチン(S18)が実行される。
【0044】
本発明の実施例は、個々の電動式移動棚において、上記右駆動モードあるいは左駆動モードでの起動時の動作、さらには停止時の動作に、図2とともに説明したような特徴がある。図5は、この特徴ある通常モードでの動作を示す。上記起動時の動作、さらには停止時の動作の特徴は、右駆動モードかまたは左駆動モードかには無関係であるから、図5では右駆動モードと左駆動モードの区別はしていない。本発明の一つの特徴は、個々の移動棚において個別に移動すべきか否か、どの向きに移動すべきかを判断し、この判断のもとに移動、停止を制御する点にある。以下に説明する図5の動作は、個々の移動棚において個別に行われる。
【0045】
図5において、まず、駆動スイッチがオンか否かを判断する(S51)。駆動スイッチとは、図3に示す左右の駆動スイッチ4R,4Lのことである。駆動スイッチすなわち左右の駆動スイッチ4R,4Lの何れかが操作されていると、「目標デューティ>現在デューティか否か」、すなわちDt>Diか否かの判断ステップ(S52)に進む。ステップS51で駆動スイッチすなわち左右の駆動スイッチ4R,4Lの何れも操作されていない場合は、隣接棚が接近しているか否かの判断ステップ(S63)に進む。このステップS63で隣接棚が接近していないと判断されると、ステップS51に戻る。ステップS63で隣接棚が接近していると判断された場合は、上記「目標デューティ>現在デューティか否か」の判断ステップ(S52)に進む。上記ステップS63で隣接棚が接近していると判断される場合の動作については後で具体的な例を挙げて説明する。
【0046】
ステップS52の「目標デューティ>現在デューティ」が成立するのは、移動すべき方向前方に停止距離よりも長い(広い)通路がある場合、または、前方の移動棚が連動距離内にありかつこの前方の移動棚が移動することができる状態にある場合である。ステップS52において「目標デューティ>現在デューティ」であれば、図2について説明した通り、駆動モードに移行し(S53)、前記モータ駆動回路部13によってモータ14を駆動する。駆動モードに移行した後「目標デューティ=100か否か」の判断ステップ(S54)に進む。「目標デューティ=100」とは、図2について説明した通り、目標デューティが最大デューティであるということである。「目標デューティ=100」であれば、次の「スロースタートで加速」ステップ(S55)に進み、当初低い駆動デューティでモータ14を起動し、駆動デューティを順次高めることによってモータ14の回転速度を上げていく。
【0047】
次に、「現在デューティ=100か否か」の判断ステップ(S56)に進む。「現在デューティ=100」であれば、デューティ100で定速走行し(S57)、「現在デューティ=100」でなければ、「スロースタートで加速」ステップ(S55)に戻り、加速し続ける。
【0048】
ステップS54で「目標デューティ=100」ではないと判断された場合は、前方の移動棚のデューティを目標に加速し(S64)、「現在デューティ=100か否かを判断する(S65)。「現在デューティ=100」であれば、ステップS57に進んでデューティ100を維持して定速走行する。
【0049】
ステップS57で定速走行しているとき、「目標デューティ<現在デューティか否か」を判断する(S58)。「目標デューティ<現在デューティ」が成立しない場合は、デューティ100で定速走行(S57)を続行する。「目標デューティ<現在デューティ」が成立するのは、移動方向前方に隣り合う移動棚のデューティが下がることに倣ってデューティが下がることによる。デューティが下がり、「目標デューティ<現在デューティ」が成立すると制動モードに移行する(S59)。
【0050】
制動モードに移行した後は、目標デューティの減少に伴って減速される(S60)。この減速動作は、駆動デューティが「0」になって、移動棚が停止するまで実行される。すなわち、上記減速動作を実行して、「目標デューティ=0か否か」を判断し(S61)、「目標デューティ=0」であれば、一連の動作を停止して通常モードに移行し(S62)、「目標デューティ=0」でなければ、目標デューティの減少に伴う減速動作(S60)を続行する。前方の移動棚が停止位置に近づくにしたがい目標デューティが減少し、前方の移動棚が停止距離に達して停止した場合に「目標デューティ=0」が成立する。本実施例では、制動モードに移行後、ステップS60で「目標デューティの減少により減速」しているが、予め定められている「スローストップレート」で減速するようにしてもよい。
【0051】
以上のように制御される電動式移動棚によれば、個々の移動棚において、駆動スイッチすなわち左右の駆動スイッチ4R,4Lの何れかが操作され、右または左に移動スペースがあると右または左に移動する。移動スペースがなくなれば移動を停止する。このようにして、任意の移動棚で右行きまたは左行き駆動スイッチが操作されると、移動すべきか否か、移動している場合どこで停止するかの判断は個々の移動棚によって行うため、移動棚相互間で交換する制御信号が単純で、移動棚相互間をつなぐワイヤの類を少なくすることができる利点がある。
【0052】
また、図示した実施例に係る電動式移動棚によれば、移動方向前方の移動棚の駆動デューティが上昇すると、これに倣って移動方向後方の移動棚の駆動デューティも上昇する。この駆動デューティが予め設定した値を超えると、上記前方の移動棚に続く後方の移動棚のモータ14にも給電されてモータ14を駆動するとともに、モータ14の駆動デューティを連続的に上昇させる。このような駆動デューティを連続的に変化させることによる移動棚の速度制御は、移動させるべきすべての移動棚において個別に行われる。しかしながら、移動すべき移動棚はほとんど同時に一群となって移動するため、所定位置への作業通路の形成が迅速に行われる。
【0053】
次に、図5のステップS63の隣接棚が接近してきたか否かの判断動作について、具体的な例を挙げて説明する。この動作が有効になるのは図6に示すように複数の通路が形成されている場合において、いずれかの棚の駆動スイッチが操作された場合である。いま、図6(a)に示すように、相対向する左右の壁2,3間に5台の移動棚A,B,C,D,Eが並べられ、棚CとDの間および棚DとEの間にそれぞれ通路が形成されている状態にあるものとする。すなわち、棚A、B間および棚B、C間にはごく僅かなスペースが、棚C、D間および棚D、E間には大きなスペースが、壁2と棚A間および壁3と棚E間にはごく僅かなスペースが形成されているものとする。この状態で、左端の棚Aと壁2との間に通路を形成するために棚Aの駆動スイッチ4Rを右方に押したとする。
【0054】
上記駆動スイッチ4Rが押されると、棚A,B,Cが駆動状態になり、右の方に十分なスペースがある棚Cの目標デューティが100になり、Dt>Diとなることによって、棚Cが駆動モードになり右方に移動を開始する。このときの各棚の駆動デューティは以下のとおりである。
【0055】
<棚Cの駆動デューティ>
棚Cの目標デューティDtは前述のように100である。これを前記式1にあてはめると、
(Wf−Sd)×k+Df≧100
であるから、前述のように、
Dt=100
とする。
【0056】
<棚Bの駆動デューティ>
Wf−Sd=0
である。これを前記式1にあてはめると、
Dt=Df
となる。このときのDfは、棚Cのデューティであるから、棚Bのデューティも棚CのデューティDfに倣って100になる。
【0057】
<棚Aの駆動デューティ>
Wf−Sd=0
である。これを前記式1にあてはめると、
Dt=Df
このときのDfは、棚Bのデューティであるから、棚Aのデューティも棚BのデューティDfに倣って100になる。
【0058】
<棚D・Eの駆動デューティ>
棚Dおよび棚Eは駆動信号を受け取っていないため、Dt=0である。
【0059】
上記のように、棚B,Aにおいては、移動方向前方の棚CのデューティDfが大きくなることによりDt>Diとなり、棚B,Aが駆動モードとなって右方に移動を開始する。このようにして、移動方向前方の棚Cのデューティに追随して後続の棚B,Aのデューティが大きくなり、後続の棚B,Aが前方の棚Cに追随して移動する。
【0060】
棚C,B,Aの移動により、図6(b)に示すように棚Cが棚Dに一定距離まで接近すると、棚Dでは、図5に示すステップS63において棚Cの接近を検出し、図5に示すステップS52に進む。上記棚Cが棚Dに「一定距離まで接近」という場合の「一定距離」とは、図7に示すように、棚C、D間の「連動距離」のことである。棚Cが棚Dに連動距離まで接近すると、棚Dの右側には十分なスペースがあるため、棚Dの目標デューティが100になり、Dt>Diとなることによって、棚Dが駆動モードになり右方に移動を開始する。このようにして、棚Aから棚Dまでが一塊となって右方にデューティ100で定速走行する。
【0061】
棚Dが棚Eに接近すると、棚Eは右側に移動スペースがなく右側に移動することができないため、棚Eの駆動デューティは0のままであり、棚Eに所定の連動距離以下に接近した棚Dの駆動デューティの目標値Dtが下がる。これを前記式1
Dt=(Wf−Sd)×k+Df
にあてはめると、Df=0であるから、棚Dにおいて「Dt<Di」が成立するまでは、すなわち、「Dt>Di」の間は、
(Wf−Sd)×k≧0
であり、棚Dでは棚Eとの距離を見ながら駆動デューティの目標値Dtが小さくなっていく。そして、棚Dにおいて「Dt<Di」が成立すると、図5にステップS59で示す制動モードに移行して、スローストップレートで減速し(S60)、目標デューティが0になると(S62のYes)走行を停止する(S62)。
【0062】
棚Dの上記デューティの降下、制動モードへの移行、スローストップレートでの減速、停止という動作が、棚Dに追随して走行している棚C,B,Aにおいても同様に行われ、図6(c)に示すように、すべての棚A乃至Eが右方に収束し、棚Aと壁2との間に作業通路が形成されて一連の動作を終わる。
【0063】
本発明の実施例によれば、使用者の意図に応じて複数個所に作業通路を形成することができる電動式移動棚システムを簡単な構成で実現することができとともに、多通路形成時において別の位置に作業通路を形成しようとする場合の動作の迅速化を図ることができる。
【産業上の利用可能性】
【0064】
本発明に係る電動式移動棚は、小規模の移動棚装置から大規模の移動棚装置まで、あらゆる規模の移動棚装置に適用可能である。
本発明に係る電動式移動棚によれば、作業者の意図によって、単通路方式の移動棚としても、多通路方式の移動棚としても使用可能であり、多通路を可能にするための特別な構成を付加する必要はない。
【符号の説明】
【0065】
4R 駆動スイッチ
4L 駆動スイッチ
10 メイン制御回路部
12 入出力回路部
13 モータ駆動回路部
14 モータ
【特許請求の範囲】
【請求項1】
複数の移動棚がモータの駆動力により移動可能に並べられてなる電動式移動棚システムを構成する個々の電動式移動棚が、駆動源であるモータと、このモータの正逆回転および停止を制御する制御回路と、を有し、
個々の移動棚における上記制御回路は、目標とする駆動デューティと現在の駆動デューティを比較するデューティ比較部を有し、
上記個々の移動棚は、上記デューティ比較部による比較結果が現在の駆動デューティより目標とする駆動デューティが大きい場合に上記モータを駆動するモータ駆動回路部を有してなる電動式移動棚。
【請求項2】
個々の移動棚におけるモータ駆動回路部は、デューティ比較部による比較の結果、現在の駆動デューティよりも目標とする駆動デューティが小さくなった場合、目標とする駆動デューティがゼロになるまで駆動デューティを連続的に低くしながら上記モータを駆動して移動棚を減速させる請求項1記載の電動式移動棚。
【請求項3】
個々の移動棚における制御回路は、各移動棚における移動方向前方の棚との通路幅をWf、停止距離をSd、移動方向前方の棚のデューティをDf、係数をk、現在の自己の駆動デューティをDiとすると、目標とする駆動デューティの目標値Dtを、
Dt=(Wf−Sd)×k+Df
の式で求める目標デューティ演算部を有し、
モータ駆動回路部は、デューティ比較部による比較結果がDt>Diの場合に駆動モードに入る請求項1または2記載の電動式移動棚。
【請求項4】
個々の移動棚における制御回路は、それぞれの移動棚の駆動スイッチが操作されることによってその移動棚のモータ駆動回路部によりモータを駆動する請求項1乃至3のいずれかに記載の電動式移動棚。
【請求項5】
個々の移動棚における制御回路は、隣接棚が接近し、かつ、デューティ比較部による比較結果が現在の駆動デューティより目標とする駆動デューティが大きい場合に、上記隣接棚の移動の向きと同じ向きにその移動棚が移動するように、モータ駆動回路部によりモータを駆動する請求項1乃至3のいずれかに記載の電動式移動棚。
【請求項6】
個々の移動棚におけるモータ駆動回路部は、駆動デューティが最大デューティに達すると、デューティ比較部による比較結果がDt<Diになるまで最大デューティによってモータを駆動する請求項1乃至5のいずれかに記載の電動式移動棚。
【請求項1】
複数の移動棚がモータの駆動力により移動可能に並べられてなる電動式移動棚システムを構成する個々の電動式移動棚が、駆動源であるモータと、このモータの正逆回転および停止を制御する制御回路と、を有し、
個々の移動棚における上記制御回路は、目標とする駆動デューティと現在の駆動デューティを比較するデューティ比較部を有し、
上記個々の移動棚は、上記デューティ比較部による比較結果が現在の駆動デューティより目標とする駆動デューティが大きい場合に上記モータを駆動するモータ駆動回路部を有してなる電動式移動棚。
【請求項2】
個々の移動棚におけるモータ駆動回路部は、デューティ比較部による比較の結果、現在の駆動デューティよりも目標とする駆動デューティが小さくなった場合、目標とする駆動デューティがゼロになるまで駆動デューティを連続的に低くしながら上記モータを駆動して移動棚を減速させる請求項1記載の電動式移動棚。
【請求項3】
個々の移動棚における制御回路は、各移動棚における移動方向前方の棚との通路幅をWf、停止距離をSd、移動方向前方の棚のデューティをDf、係数をk、現在の自己の駆動デューティをDiとすると、目標とする駆動デューティの目標値Dtを、
Dt=(Wf−Sd)×k+Df
の式で求める目標デューティ演算部を有し、
モータ駆動回路部は、デューティ比較部による比較結果がDt>Diの場合に駆動モードに入る請求項1または2記載の電動式移動棚。
【請求項4】
個々の移動棚における制御回路は、それぞれの移動棚の駆動スイッチが操作されることによってその移動棚のモータ駆動回路部によりモータを駆動する請求項1乃至3のいずれかに記載の電動式移動棚。
【請求項5】
個々の移動棚における制御回路は、隣接棚が接近し、かつ、デューティ比較部による比較結果が現在の駆動デューティより目標とする駆動デューティが大きい場合に、上記隣接棚の移動の向きと同じ向きにその移動棚が移動するように、モータ駆動回路部によりモータを駆動する請求項1乃至3のいずれかに記載の電動式移動棚。
【請求項6】
個々の移動棚におけるモータ駆動回路部は、駆動デューティが最大デューティに達すると、デューティ比較部による比較結果がDt<Diになるまで最大デューティによってモータを駆動する請求項1乃至5のいずれかに記載の電動式移動棚。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−112455(P2013−112455A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−259053(P2011−259053)
【出願日】平成23年11月28日(2011.11.28)
【出願人】(000163833)金剛株式会社 (31)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月28日(2011.11.28)
【出願人】(000163833)金剛株式会社 (31)
【Fターム(参考)】
[ Back to top ]