
電動機の位置制御装置
【課題】位置指令と位置検出の差演算に基づいて位置制御すると、任意の回転方向を指定しての位置制御ができず、また検出器の分解能によっては安定に位置制御ができない。
【解決手段】位置指令と1サンプリング分遅延させた信号との偏差信号を求め、この偏差信号と回転方向を設定する信号を入力して回転方向に対応して補正された信号を出力する回転方向指定指令補正部を設ける。回転方向指定指令補正
部により補正された信号と位置検出との偏差信号を求めて位置制御信号とする。
また、位置検出器の出力側に位置座標系変換部を設けることで、任意の座標系で位置制御を可能とする。さらに、分解能補正処理部を設けることにより安定性を向上することを可能としたものである。
【解決手段】位置指令と1サンプリング分遅延させた信号との偏差信号を求め、この偏差信号と回転方向を設定する信号を入力して回転方向に対応して補正された信号を出力する回転方向指定指令補正部を設ける。回転方向指定指令補正
部により補正された信号と位置検出との偏差信号を求めて位置制御信号とする。
また、位置検出器の出力側に位置座標系変換部を設けることで、任意の座標系で位置制御を可能とする。さらに、分解能補正処理部を設けることにより安定性を向上することを可能としたものである。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電動機の位置制御装置に関するものである。
【背景技術】
【0002】
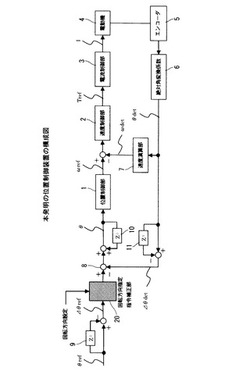
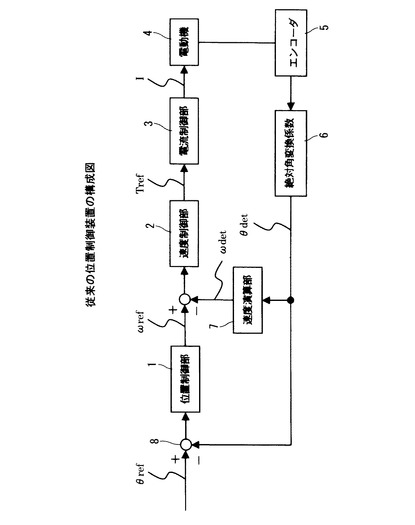
図9は位置制御装置の構成図を示したもので、位置指令θrefと電動機の位置検出θdetとの偏差信号を位置制御部1に入力して速度指令ωrefを生成する。速度制御部2は、生成した速度指令ωrefと速度演算部7により算出された速度検出ωdetの偏差信号を入力してトルク電流指令Trefを生成し、このトルク電流指令Trefに基づいて電流制御部3を介して電動機4を制御する。位置検出器(以下エンコーダという)5はそのときにおける角速度を検出し、絶対角変換係数部6により変換して位置検出θdetとして減算部8と速度演算部7に出力する。
【0003】
図9で示す位置制御は、電流制御、速度制御をマイナーループに持ち、位置制御をメジャーループとして電動機の位置を制御するもので、電動機のある点を0度とした位置(0度から360度未満の絶対角度として)指令θrefと位置検出θdetとの偏差から位置制御により速度指令ωrefを生成するものである。
【0004】
上記のように位置制御を行うものとしては、特許文献1などによって公知となっている。この、特許文献1には、機械系の共振・反共振周波数のパラメータが不明瞭の場合でも、機械系の振動を抑制するための振動抑制補償器を設け、演算によって求めた速度指令と速度検出信号との偏差分を振動抑制補償器に入力して速度指令補償信号を生成し、この補償信号と速度指令基本信号との和を速度信号とすることが記載されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2003−325473
【発明の概要】
【発明が解決しようとする課題】
【0006】
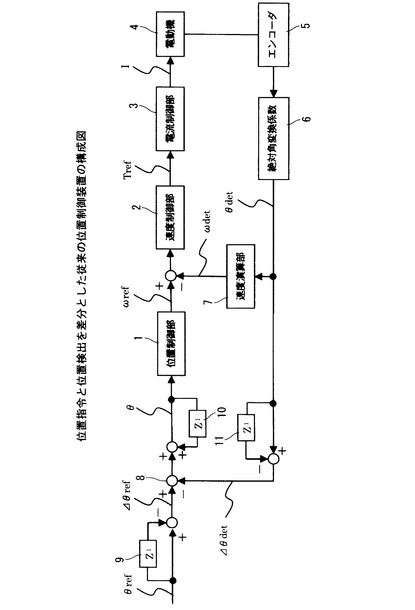
図9のような位置制御装置を用いて位置指令と位置検出をZ-1の差分とした位置制御を実行しようとすると図10のようになる。すなわち、9,10,11はそれぞれ離散時間演算子Z-1として1サンプリング周期遅延する遅延回路を設けた構成となる。減算部8では、位置指令の偏差信号Δθrefと遅延回路11において1サンプリング周期遅延させた位置検出θdetとの偏差信号Δθdetを求め、さらに、その偏差信号Δθdetに遅延回路10で1サンプリング周期遅延させた偏差信号を加算して位置偏差θとし、位置制御部1に入力する。
【0007】
ところで、制御対象物である電動機4をダイナモメータとした場合、自動車等の供試体においては、ギヤ歯を常時一定方向に接触させたいなどの理由により、位置制御モードとして正転・逆転モード、1周内偏差分モード、及び180度判別モードなどの方式が適用されている。
【0008】
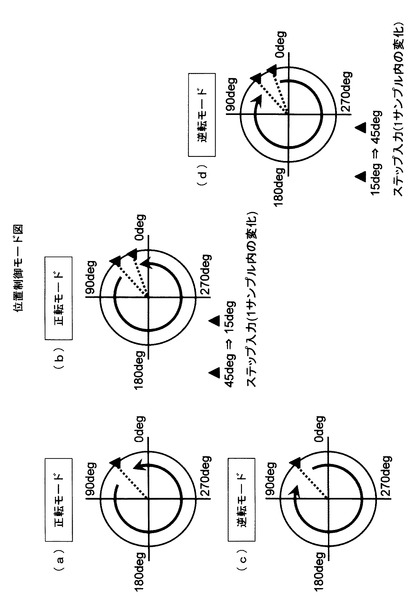
図11は、図10における位置検出θdetをサンプリングするとき、1サンプル250μsecとした場合の正転・逆転モードの説明図で、機械系の現在位置A点を原点(ゼロ基準点)とし、その原点が45度の位置にあるとしたき、正転モードの場合には45度の位置を原点としてスタートし、(a)図から(b)図のように正転方向のみ動作する。このため、1サンプル毎に逆転方向の指令が来ると正転に多回転することになって指令値にデータセット信号が必要となり、15度までの回転となる。
【0009】
逆転モードの場合には、(c)図,(d)図で示すように、逆転方向のみ動作するため、1サンプル毎に正転方向の指令が来ると逆転に多回転することになって指令値にデータセット信号が必要となり、1サンプル内の変化は15度から45度までの位置制御となる。
【0010】
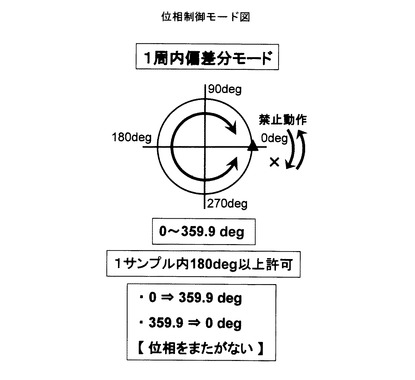
図12は位相(0度位置)をまたがない位置へ回転し、その角度は0〜360度未満の位置制御となる。
【0011】
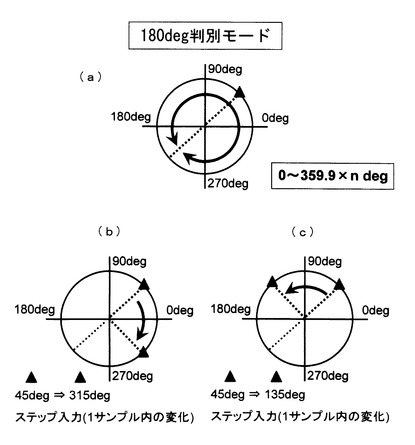
図13は180度判別モードの説明図で、この方式は1サンプル180度以内の範囲で現在位置から偏差分0〜360度未満×n度の位置制御で、(b)図で示すように1サンプル内の変化は45度から315度までの回転位置と、(c)図で示すように1サンプル内の変化は45度から135度までの位置制御となる。
【0012】
したがって、図10で示すような位置制御装置によって、図11のような方式での位置制御を実行すると、次のような問題が生じる。
(1)角度による位置指令、及び位置検出の1サンプリング周期遅延による単純偏差演算では、偏差演算結果、すなわち、位置制御部1への正の値(指令位置>制御前検出位置)であれば正方向、負の値(指令位置<制御前検出位置)であれば逆転方向に指令位置まで駆動する。そのため、任意の回転方向を指定して指令位置まで駆動させることができない。
(2)特に、制御対象物がダイナモメータとした場合などのように、負荷(供試体等の回転体)が取付けられた場合、位置検出は検出器における固有の点(原点)を0度として出力されるが、位置検出器の取付けにより必ずしも負荷側の0度とダイナモメータの0度が一致しない。そのため、負荷側の持つ位置座標により入力された位置指令では、0度が不一致(原点不一致)となり、意図した位置へ制御することが出来ない。
(3)位置指令の分解能と位置検出の分解能が異なる場合、偏差演算結果には常に分解能差分の値が残ってしまう。分解能差分の値が残ると、位置制御出力の速度指令が変動し、速度やトルクに脈動を生じる原因となり安定しないことがある。
【0013】
本発明が目的とするとこは、上記(1)〜(3)の問題点を解決した電動機の位置制御装置を提供することにある。
【課題を解決するための手段】
【0014】
本発明の請求項1は、制御対象物の位置指令とこの位置指令から1サンプル周期遅延させた位置指令の偏差信号Δθrefと、位置検出器を介して検出された電動機の位置検出とこの位置検出から1サンプル周期遅延させた位置検出の偏差信号Δθdetとの位置偏差θを求め、位置偏差θに応じた速度指令ωrefと位置検出θdetに応じた位置速度検出ωdetの偏差によってトルク電流指令を生成し、トルク電流指令によって電流制御部を介して制御対象物の位置を制御するものにおいて、
前記位置指令の偏差信号Δθrefと回転方向設定を入力して回転方向に対応して補正された偏差信号Δθrefを出力する回転方向指定指令補正部を設け、この回転方向指定指令補正部で補正された偏差信号Δθrefと前記偏差信号Δθdetとの位置偏差θを求めるよう構成したことを特徴としたものである。
【0015】
本発明の請求項2は、前記回転方向指定指令補正部は、回転方向設定が正転方向時に入力された偏差信号Δθrefの値が[Δθref<0]のときに360度−|Δθref|の位置の補正信号を出力し、[Δθref<0]以外のときに入力された偏差信号Δθrefを出力すると共に、回転方向設定が逆転方向時に入力された偏差信号Δθrefの値が[Δθref>0]のときに[Δθref−360度]の位置の補正信号を出力し、[Δθref>0]以外のときに入力された偏差信号Δθrefを出力する構成したことを特徴としたものである。
【0016】
本発明の請求項3は、制御対象物の位置指令とこの位置指令から1サンプル周期遅延させた位置指令の偏差信号Δθrefと、位置検出器を介して検出された電動機の位置検出とこの位置検出から1サンプル周期遅延させた位置検出の偏差信号Δθdetとの位置偏差θを求め、位置偏差θに応じた速度指令ωrefと位置検出θdetに応じた位置速度検出ωdetの偏差によってトルク電流指令を生成し、トルク電流指令によって電流制御部を介して制御対象物の位置を制御するものにおいて、
前記位置指令の偏差信号Δθrefを入力し、前回の回転指令と今回の回転指令の偏差が180度以内となる方向へ駆動するよう位置指令の偏差信号Δθrefを補正する回転方向指定指令補正部を設けたことを特徴としたものである。
【0017】
本発明の請求項4は、前記回転方向指定指令補正部は、前回位置指令と今回位置指令との関係で、0度<|Δθref|<180度のときにΔθrefの信号を出力し、[180度<|Δθref|<360度]のときに[|Δθref|−360度]の補正信号を出力し、且つ位置指令が180度のときに任意の方向への駆動信号を出力するよう構成したことを特徴としたものである。
【0018】
本発明の請求項5は、制御対象物の位置指令とこの位置指令から1サンプル周期遅延させた位置指令の偏差信号Δθrefと、位置検出器を介して検出された電動機の位置検出とこの位置検出から1サンプル周期遅延させた位置検出の偏差信号Δθdetとの位置偏差θを求め、位置偏差θに応じた速度指令ωrefと位置検出θdetに応じた位置速度検出ωdetの偏差によってトルク電流指令を生成し、トルク電流指令によって電流制御部を介して制御対象物の位置を制御するものにおいて、
前記位置検出器の出力側に位置座標系変換部を設け、この位置座標系変換部によって制御対象物の任意検出θdetを記憶し、記憶した任意の位置(記憶位置)を0度とした新たな座標系における0〜360度未満の絶対角に変換して、前記位置偏差θを算出するよう構成したことを特徴としたものである。
【0019】
本発明の請求項6は、前記位置座標系変換部は、前記記憶位置と前記位置検出器からの位置検出θdetの関係が[θdet≧記憶位置]のときに[θ´det=θdet−記憶位置]の変換信号を出力し、[θdet<記憶位置]のときに[θ´det=360−記憶位置+θdet]の変換信号を出力することを特徴としたものである。
【0020】
本発明の請求項7は、制御対象物の位置指令とこの位置指令から1サンプル周期遅延させた位置指令の偏差信号Δθrefと、位置検出器を介して検出された電動機の位置検出とこの位置検出から1サンプル周期遅延させた位置検出の偏差信号Δθdetとの位置偏差θを求め、位置偏差θに応じた速度指令ωrefと位置検出θdetに応じた位置速度検出ωdetの偏差によってトルク電流指令を生成し、トルク電流指令によって電流制御部を介して制御対象物の位置を制御するものにおいて、
前記位置検出器の出力側に位置座標系変換部を設け、この位置座標系変換部によって制御対象物の任意検出θdetを記憶し、記憶した任意の位置(記憶位置)を0度とした新たな座標系における0〜360度未満の絶対角に変換し、この変換信号を制御系外部のインターフェースに出力すると共に、
前記ダイナモメータの位置指令の制御系外に位置座標系逆変換部を設け、この位置座標系逆変換部によってイベント発生時の制御対象物位置を記憶し、記憶した任意位置を0度として前記位置検出器の座標系位置指令θrefに変換し、前記制御対象物の位置指令とすることを特徴としたものである。
【0021】
本発明の請求項8は、制御対象物の位置指令とこの位置指令から1サンプル周期遅延させた位置指令の偏差信号Δθrefと、位置検出器を介して検出された電動機の位置検出とこの位置検出から1サンプル周期遅延させた位置検出の偏差信号Δθdetとの位置偏差θを求め、位置偏差θに応じた速度指令ωrefと位置検出θdetに応じた位置速度検出ωdetの偏差によってトルク電流指令を生成し、トルク電流指令によって電流制御部を介して制御対象物の位置を制御するものにおいて、
前記制御対象物の位置指令の制御系外に分解能補正処理部を設け、この分解能補正処理部により、制御系外より入力されるインターフェースからの位置指令に依存する角度データが持つ分解能を、前記位置検出器の位置検出分解能相当に補正することを特徴としたものである。
【0022】
本発明の請求項9は、前記分解能補正処理部は、入力されたインターフェースからの位置指令をθ´refとしたとき、[(位置検出器の1回転出力/θ´ref分解能出力)×絶対角変換係数]の演算で制御対象物の位置指令θrefを求めることを特徴としたものである。
【発明の効果】
【0023】
以上のとおり、本発明によれば、制御対象物の停止角度位置が如何なる位置であっても、停止から正転方向,或いは逆転方向への回転でも、任意の指定位置にまで精度良く制御が可能となり、制御対象物と試供体の位置の不一致が解消できるものである。また、一制御装置の制御系外からインターフェースを介して位置制御する場合でも、分解能誤差を生じることなく安定した位置制御が可能となるものである。
【図面の簡単な説明】
【0024】
【図1】本発明の実施例を示す位置制御装置の構成図。
【図2】本発明の回転方向指定指令補正部の位置指令補正のフロー図。
【図3】本発明の他の実施例を示す位置制御装置の構成図。
【図4】本発明の他の実施例を示す位置制御装置の構成図。
【図5】本発明の位置座標系変換部の座標変換処理フロー図。
【図6】本発明の他の実施例を示す位置制御装置の構成図。
【図7】本発明の他の実施例を示す位置制御装置の構成図。
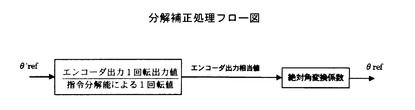
【図8】本発明の分解能補正処理部の補正処理フロー図。
【図9】従来の位置制御装置の構成図。
【図10】位置指令と位置検出を差分とした従来の位置制御装置の構成図。
【図11】位置制御モード(正逆モード)の説明図。
【図12】位置制御モード(1周内偏差分モード)の説明図。
【図13】位置制御モード(180度モード)の説明図。
【発明を実施するための形態】
【0025】
本発明は、制御対象物の位置指令系統に回転方向の指定と指令を補正する手段を設けることで、制御対象物の任意の回転方向を指定し、指令位置までの制御対象物の駆動を行う。また、位置検出器の出力側に位置座標系変換部を設けることで、制御対象物と供試体の原点不一致の解消と位置制御系の外部よりの位置制御を可能とすると共に、分解能補正処理部を設けることで、位置指令の系統外からの位置制御を可能とするものである。以下図に基づいて本発明の実施例を詳述する。
【実施例1】
【0026】
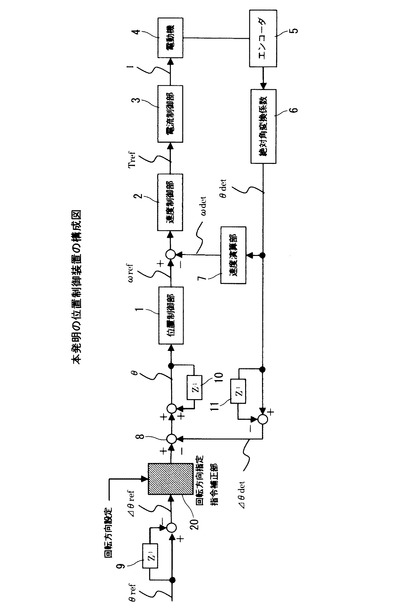
図1は、本発明の第1の実施例を示す構成図で、図9,図10と同一部分、若しくは相当する部分に同一符号を付してその説明を省略する。
20は本発明による回転方向指定指令補正部で、位置指令θrefと遅延回路9によって1サンプル周期遅延させた位置指令の偏差信号Δθrefが入力される。
【0027】
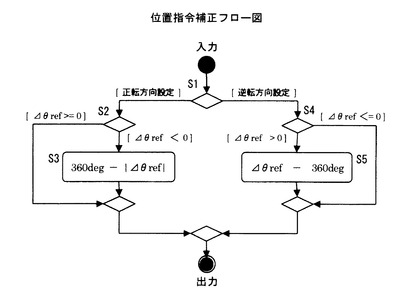
図2は回転方向指定指令補正部20による位置指令補正のためのフロー図で、回転方向設定信号が入力されると、ステップS1で正転方向設定か逆転方向設定かを判断し、正転方向設定の場合には、ステップS2でΔθref≧0か又はΔθref<0かを判断する。Δθref≧0の場合には偏差信号Δθrefをそのまま減算部8に出力するが、Δθref<0の場合には、S3で360度−|Δθref|を演算してその差信号を求める。この差信号を補正した位置指令の偏差信号Δθrefとして減算部8に出力する。
【0028】
一方、ステップS1で位置指令が逆転方向設定と判断したときには、ステップS4でΔθref≦0か又はΔθref>0かを判断する。Δθref≦0のときは偏差信号Δθrefをそのまま減算部8に出力するが、Δθref>0の場合にはステップS5でΔθref−360度の演算を実行し、その偏差を補正した位置指令の偏差信号Δθrefとして減算部8に出力する。
【0029】
つまり、回転方向指定指令補正部20は、位置指令入力が確定する毎に回転方向設定を参照し、設定された正転、又は逆転方向への指令位置で停止するよう位置指令の偏差信号Δθrefを補正して減算部8に出力する。減算部8は、入力された偏差信号Δθrefと遅延回路11により1サンプリング周期遅延させた位置検出の偏差信号Δθdetの差演算を実行し、さらに、その差信号に遅延回路10で積算(1サンプリング周期遅延させた信号を加算)して位置偏差θとし、位置制御部1に入力して速度指令ωrefを生成する。
【0030】
速度制御部2では、速度指令ωrefと速度演算部7により算出された速度検出ωdetの偏差信号を入力してトルク電流指令Trefを演算し、このトルク電流指令Trefに基づいて電流制御部3を介して電動機4を制御する。これにより、
電流制御部3が出力する電流Iは、回転方向指定指令生成部20による位置指令入力が確定する毎に、回転方向設定を参照しながら設定回転方向に対応して補正(又は補正しないで)された位置指令に基づくため、指令設定された回転位置に停止できる。
【0031】
したがって、この実施例によれば、回転方向指定指令補正部20を設け、任意の位置にまで制御対象物である電動機を回転させるとき、回転方向指定指令補正部20に位置指令入力と共に回転方向を指定する信号を入力し、回転方向に応じて偏差信号Δθrefを補正するものである。これにより、前述した課題の(1)が解決でき、任意の回転方向を指定しながら指令位置までの電動機駆動時における機能向上が可能となるものである。
【実施例2】
【0032】
図3は本発明の第2の実施例を示す構成図で、回転方向指定指令補正部20a
は、前回の回転指令と今回の回転指令の偏差が180度以内となる方向へ駆動するよう位置指令の偏差信号Δθrefを補正するものである。そのために、図11等で示す任意の位置A点で停止中の電動機に対して、回転方向指定指令補正部20aは、次のように判断しながら、偏差信号Δθrefを出力する。
(a) 0度<|Δθref|<180度………→Δθrefを出力。
(b) 180度<|Δθref|<360度…→|Δθref|−360度を出力。
(c) 位置指令θrefが180度のとき……→任意の方向へ駆動する。
他は、図1で示す実施例1と同様である。
【0033】
したがって、第2の実施例によれば、位置制御において任意の位置まで電動機を回転させるとき、任意の回転方向に前回の位置指令との偏差180度以内となるよう、入力する指令を分割するものである。これにより、前述した課題の(1)が解決でき、任意の回転方向を指定しながら指令位置までの電動機駆動時における機能向上が可能となるものである。
【実施例3】
【0034】
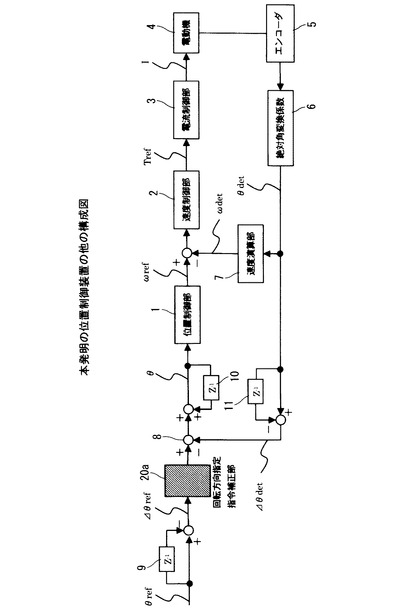
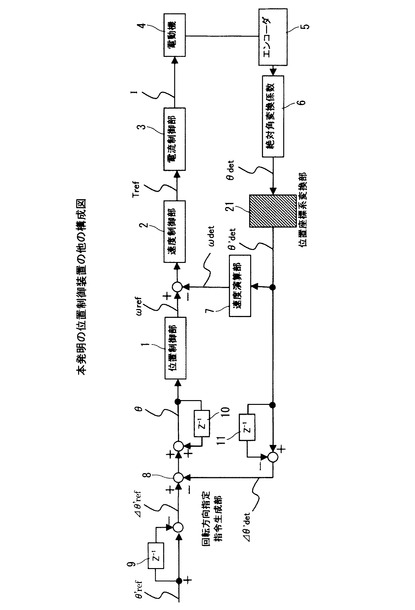
図4は本発明の第3の実施例を示す構成図で、この実施例は位置検出系に位置座標系変換部21を設けて任意の座標系で位置制御を行うことを可能としたものである。すなわち、電動機4の角速度はエンコーダ5によって検出され、絶対角変換係数部6によって位置検出θdetに変換されて位置座標系変換部21に入力される。位置座標系変換部21は記憶部を備えており、電動機4(ダイナモメータ)が停止している現在の位置を記憶し、その記憶した位置を0度とする座標系が構築されている。
【0035】
ここで、「θ」はエンコーダ5が持つ座標系(ダイナモシステムの座標系)における0〜360度未満の絶対角を示し、「θ´」は任意の位置を0度として構築した座標系における0〜360度未満の絶対角を示す。位置座標系変換部21は、エンコーダ5の出力(絶対角変換係数部6の出力)に対して位置座標系変換を行うことで、制御自体を任意の座標系で行うものである。これにより、制御系外とのインターフェースで用いる座標系は、任意の座標系による絶対角を用いることを可能としたものである。したがって、制御系に入力される位置指令θ´refは、制御系外からの位置指令で、他は図10と同様である。
【0036】
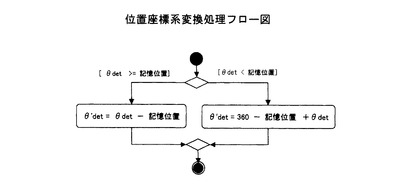
図5は位置座標系変換部21による位置座標系変換処理フロー図を示したものである。
位置座標系変換部21に位置検出θdetが入力されると、ステップS11で位置検出θdetと記憶位置を比較する。その結果、θdet≧記憶位置のときにはステップS12で、[θ´det=θdet−記憶位置]を演算して新座標系位置θ´detに変換し、遅延回路11を介して位置制御系へフィードバックされると共に、速度演算部7に入力される。
【0037】
一方、ステップS11でθdet<記憶位置のときにはステップS13で
[θ´det=360度−記憶位置+θdet]を演算して新座標系位置θ´detに変換する。
【0038】
第3の実施例によれば、任意の位置をゼロ度とした座標系を構築した位置座標系変換部21を設け、エンコーダ5で検出した位置を座標変換することで、任意の座標系で位置制御が可能となるものである。これにより、前述した課題の(2)で述べたダイナモメータと負荷側の0度の不一致(原点不一致)が解消でき、ダイナモメータ駆動時における機能向上と制御性能の向上が可能となるものである。
【実施例4】
【0039】
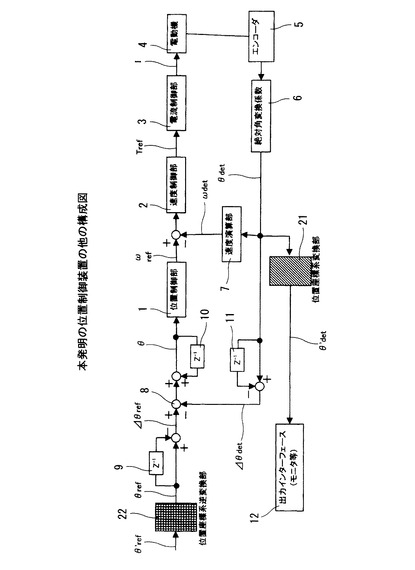
図6は本発明の第4の実施例を示す構成図で、この実施例は位置制御系のフィードバックループ外に位置座標系変換部21を設けると共に、位置指令の入力側に位置座標系逆変換部22を設けたもので、他は図4と同様である。
位置座標系逆変換部22には、制御系外から入力される電動機制御系(ダイナモシステム)に依存しない任意の座標系による0〜360度未満の絶対角の位置指令θ´refが入力される。
【0040】
すなわち、位置座標系逆変換部22は、位置記憶信号などによるイベントの発生を受けてダイナモメータの位置を記憶し、記憶した位置を0度とする新座標系を構築する。新座標系の構築後に、入力された位置指令θ´refは位置座標系逆変換部22においてエンコーダ座標系の位置指令θrefに変換され、以下、図10と同様に位置制御される。
【0041】
一方、位置制御系のフィードバックループ外に設けられた位置座標系変換部21は、位置検出θdetを入力し、図5で示す処理フローにしたがって新座標系位置θ´detに変換するが、θ´detは、モニタ等の外部出力用インターフェース12に出力される。これにより、ダイナモメータ外部からは任意の点を0度とした座標系による制御が可能となる。
【0042】
したがって、第4の実施例によれば、任意の位置を0度とした新座標系を構築し、新座標系により入力された位置指令をエンコーダ検出座標系へ変換すると共に、外部出力用インターフェースにおいてエンコーダ検出座標系による位置検出を新座標系へ変換したものである。これにより、ダイナモメータがあたかも任意の位置を0度として位置制御を行っているとみなすことが可能となり、前述した課題の(2)で述べたダイナモメータと負荷側の0度の不一致(原点不一致)が解消でき、ダイナモメータ駆動時における機能向上が可能となるものである。
【実施例5】
【0043】
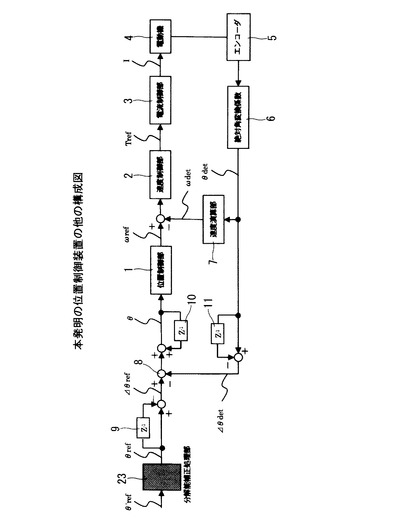
図7は本発明の第5の実施例を示す構成図で、制御系の入力側に分解能補正処理部23を設けたものである。他は図10と同様に構成される。
図7で示す「θ」と「θ´」はそれぞれの角度データが持つ分解能を基準としたもので、「θ」はエンコーダ5が持つ分解能(パルス数等に依存)の機械角データを示し、また、「θ´」は入力された制御指令が持つ分解能(制御系外とのインターフェースのデータ幅に依存)の機械角データを示す。
【0044】
分解能補正処理部23は、制御系外から位置指令θ´refが入力すると検出に用いられるエンコーダ5のパルス換算値相当に変換する。ここで、エンコーダ5のパルス換算値相当とは、電動機4が0から指令位置にまで正転した時のエンコーダ出力値をパルス変換した値である。例えば、256歯のギヤを持つインクリメンタルエンコーダを用いたとき、180度の位置指令は512pp(256歯×4逓倍×(180度/360度))相当となる。このエンコーダパルス換算値に対して、検出部で用いるエンコーダ出力値から絶対角への絶対角変換係数と同様の係数を用いて再度絶対角を求めることで位置指令θrefと位置検出θdetの分解能を同じものとする。図8は、分解能補正処理部23によるフロー図である。
【0045】
第5の実施例によれば、位置指令と位置検出が異なる分解能であるとき、位置指令に対してエンコーダ出力値相当に変換し、さらに位置検出と同様の係数を用いて絶対角へ再度変換することで、位置指令と位置検出分解能差を無くするものである。これにより、前述した課題の(3)で述べた分解能差分値が残ることにより発生する位置制御出力の速度指令の脈動が抑えられ、安定した位置制御が可能となるものである。
【符号の説明】
【0046】
1… 位置制御部
2… 速度制御部
3… 電流制御部
4… 電動機(ダイナモメータ)
5… 位置検出器(エンコーダ)
6… 絶対角変換係数
7… 速度演算部
20…回転方向指定指令補正部
21…位置座標系変換部
22…位置座標系逆変換部
23…分解能補正処理部
【技術分野】
【0001】
本発明は、電動機の位置制御装置に関するものである。
【背景技術】
【0002】
図9は位置制御装置の構成図を示したもので、位置指令θrefと電動機の位置検出θdetとの偏差信号を位置制御部1に入力して速度指令ωrefを生成する。速度制御部2は、生成した速度指令ωrefと速度演算部7により算出された速度検出ωdetの偏差信号を入力してトルク電流指令Trefを生成し、このトルク電流指令Trefに基づいて電流制御部3を介して電動機4を制御する。位置検出器(以下エンコーダという)5はそのときにおける角速度を検出し、絶対角変換係数部6により変換して位置検出θdetとして減算部8と速度演算部7に出力する。
【0003】
図9で示す位置制御は、電流制御、速度制御をマイナーループに持ち、位置制御をメジャーループとして電動機の位置を制御するもので、電動機のある点を0度とした位置(0度から360度未満の絶対角度として)指令θrefと位置検出θdetとの偏差から位置制御により速度指令ωrefを生成するものである。
【0004】
上記のように位置制御を行うものとしては、特許文献1などによって公知となっている。この、特許文献1には、機械系の共振・反共振周波数のパラメータが不明瞭の場合でも、機械系の振動を抑制するための振動抑制補償器を設け、演算によって求めた速度指令と速度検出信号との偏差分を振動抑制補償器に入力して速度指令補償信号を生成し、この補償信号と速度指令基本信号との和を速度信号とすることが記載されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2003−325473
【発明の概要】
【発明が解決しようとする課題】
【0006】
図9のような位置制御装置を用いて位置指令と位置検出をZ-1の差分とした位置制御を実行しようとすると図10のようになる。すなわち、9,10,11はそれぞれ離散時間演算子Z-1として1サンプリング周期遅延する遅延回路を設けた構成となる。減算部8では、位置指令の偏差信号Δθrefと遅延回路11において1サンプリング周期遅延させた位置検出θdetとの偏差信号Δθdetを求め、さらに、その偏差信号Δθdetに遅延回路10で1サンプリング周期遅延させた偏差信号を加算して位置偏差θとし、位置制御部1に入力する。
【0007】
ところで、制御対象物である電動機4をダイナモメータとした場合、自動車等の供試体においては、ギヤ歯を常時一定方向に接触させたいなどの理由により、位置制御モードとして正転・逆転モード、1周内偏差分モード、及び180度判別モードなどの方式が適用されている。
【0008】
図11は、図10における位置検出θdetをサンプリングするとき、1サンプル250μsecとした場合の正転・逆転モードの説明図で、機械系の現在位置A点を原点(ゼロ基準点)とし、その原点が45度の位置にあるとしたき、正転モードの場合には45度の位置を原点としてスタートし、(a)図から(b)図のように正転方向のみ動作する。このため、1サンプル毎に逆転方向の指令が来ると正転に多回転することになって指令値にデータセット信号が必要となり、15度までの回転となる。
【0009】
逆転モードの場合には、(c)図,(d)図で示すように、逆転方向のみ動作するため、1サンプル毎に正転方向の指令が来ると逆転に多回転することになって指令値にデータセット信号が必要となり、1サンプル内の変化は15度から45度までの位置制御となる。
【0010】
図12は位相(0度位置)をまたがない位置へ回転し、その角度は0〜360度未満の位置制御となる。
【0011】
図13は180度判別モードの説明図で、この方式は1サンプル180度以内の範囲で現在位置から偏差分0〜360度未満×n度の位置制御で、(b)図で示すように1サンプル内の変化は45度から315度までの回転位置と、(c)図で示すように1サンプル内の変化は45度から135度までの位置制御となる。
【0012】
したがって、図10で示すような位置制御装置によって、図11のような方式での位置制御を実行すると、次のような問題が生じる。
(1)角度による位置指令、及び位置検出の1サンプリング周期遅延による単純偏差演算では、偏差演算結果、すなわち、位置制御部1への正の値(指令位置>制御前検出位置)であれば正方向、負の値(指令位置<制御前検出位置)であれば逆転方向に指令位置まで駆動する。そのため、任意の回転方向を指定して指令位置まで駆動させることができない。
(2)特に、制御対象物がダイナモメータとした場合などのように、負荷(供試体等の回転体)が取付けられた場合、位置検出は検出器における固有の点(原点)を0度として出力されるが、位置検出器の取付けにより必ずしも負荷側の0度とダイナモメータの0度が一致しない。そのため、負荷側の持つ位置座標により入力された位置指令では、0度が不一致(原点不一致)となり、意図した位置へ制御することが出来ない。
(3)位置指令の分解能と位置検出の分解能が異なる場合、偏差演算結果には常に分解能差分の値が残ってしまう。分解能差分の値が残ると、位置制御出力の速度指令が変動し、速度やトルクに脈動を生じる原因となり安定しないことがある。
【0013】
本発明が目的とするとこは、上記(1)〜(3)の問題点を解決した電動機の位置制御装置を提供することにある。
【課題を解決するための手段】
【0014】
本発明の請求項1は、制御対象物の位置指令とこの位置指令から1サンプル周期遅延させた位置指令の偏差信号Δθrefと、位置検出器を介して検出された電動機の位置検出とこの位置検出から1サンプル周期遅延させた位置検出の偏差信号Δθdetとの位置偏差θを求め、位置偏差θに応じた速度指令ωrefと位置検出θdetに応じた位置速度検出ωdetの偏差によってトルク電流指令を生成し、トルク電流指令によって電流制御部を介して制御対象物の位置を制御するものにおいて、
前記位置指令の偏差信号Δθrefと回転方向設定を入力して回転方向に対応して補正された偏差信号Δθrefを出力する回転方向指定指令補正部を設け、この回転方向指定指令補正部で補正された偏差信号Δθrefと前記偏差信号Δθdetとの位置偏差θを求めるよう構成したことを特徴としたものである。
【0015】
本発明の請求項2は、前記回転方向指定指令補正部は、回転方向設定が正転方向時に入力された偏差信号Δθrefの値が[Δθref<0]のときに360度−|Δθref|の位置の補正信号を出力し、[Δθref<0]以外のときに入力された偏差信号Δθrefを出力すると共に、回転方向設定が逆転方向時に入力された偏差信号Δθrefの値が[Δθref>0]のときに[Δθref−360度]の位置の補正信号を出力し、[Δθref>0]以外のときに入力された偏差信号Δθrefを出力する構成したことを特徴としたものである。
【0016】
本発明の請求項3は、制御対象物の位置指令とこの位置指令から1サンプル周期遅延させた位置指令の偏差信号Δθrefと、位置検出器を介して検出された電動機の位置検出とこの位置検出から1サンプル周期遅延させた位置検出の偏差信号Δθdetとの位置偏差θを求め、位置偏差θに応じた速度指令ωrefと位置検出θdetに応じた位置速度検出ωdetの偏差によってトルク電流指令を生成し、トルク電流指令によって電流制御部を介して制御対象物の位置を制御するものにおいて、
前記位置指令の偏差信号Δθrefを入力し、前回の回転指令と今回の回転指令の偏差が180度以内となる方向へ駆動するよう位置指令の偏差信号Δθrefを補正する回転方向指定指令補正部を設けたことを特徴としたものである。
【0017】
本発明の請求項4は、前記回転方向指定指令補正部は、前回位置指令と今回位置指令との関係で、0度<|Δθref|<180度のときにΔθrefの信号を出力し、[180度<|Δθref|<360度]のときに[|Δθref|−360度]の補正信号を出力し、且つ位置指令が180度のときに任意の方向への駆動信号を出力するよう構成したことを特徴としたものである。
【0018】
本発明の請求項5は、制御対象物の位置指令とこの位置指令から1サンプル周期遅延させた位置指令の偏差信号Δθrefと、位置検出器を介して検出された電動機の位置検出とこの位置検出から1サンプル周期遅延させた位置検出の偏差信号Δθdetとの位置偏差θを求め、位置偏差θに応じた速度指令ωrefと位置検出θdetに応じた位置速度検出ωdetの偏差によってトルク電流指令を生成し、トルク電流指令によって電流制御部を介して制御対象物の位置を制御するものにおいて、
前記位置検出器の出力側に位置座標系変換部を設け、この位置座標系変換部によって制御対象物の任意検出θdetを記憶し、記憶した任意の位置(記憶位置)を0度とした新たな座標系における0〜360度未満の絶対角に変換して、前記位置偏差θを算出するよう構成したことを特徴としたものである。
【0019】
本発明の請求項6は、前記位置座標系変換部は、前記記憶位置と前記位置検出器からの位置検出θdetの関係が[θdet≧記憶位置]のときに[θ´det=θdet−記憶位置]の変換信号を出力し、[θdet<記憶位置]のときに[θ´det=360−記憶位置+θdet]の変換信号を出力することを特徴としたものである。
【0020】
本発明の請求項7は、制御対象物の位置指令とこの位置指令から1サンプル周期遅延させた位置指令の偏差信号Δθrefと、位置検出器を介して検出された電動機の位置検出とこの位置検出から1サンプル周期遅延させた位置検出の偏差信号Δθdetとの位置偏差θを求め、位置偏差θに応じた速度指令ωrefと位置検出θdetに応じた位置速度検出ωdetの偏差によってトルク電流指令を生成し、トルク電流指令によって電流制御部を介して制御対象物の位置を制御するものにおいて、
前記位置検出器の出力側に位置座標系変換部を設け、この位置座標系変換部によって制御対象物の任意検出θdetを記憶し、記憶した任意の位置(記憶位置)を0度とした新たな座標系における0〜360度未満の絶対角に変換し、この変換信号を制御系外部のインターフェースに出力すると共に、
前記ダイナモメータの位置指令の制御系外に位置座標系逆変換部を設け、この位置座標系逆変換部によってイベント発生時の制御対象物位置を記憶し、記憶した任意位置を0度として前記位置検出器の座標系位置指令θrefに変換し、前記制御対象物の位置指令とすることを特徴としたものである。
【0021】
本発明の請求項8は、制御対象物の位置指令とこの位置指令から1サンプル周期遅延させた位置指令の偏差信号Δθrefと、位置検出器を介して検出された電動機の位置検出とこの位置検出から1サンプル周期遅延させた位置検出の偏差信号Δθdetとの位置偏差θを求め、位置偏差θに応じた速度指令ωrefと位置検出θdetに応じた位置速度検出ωdetの偏差によってトルク電流指令を生成し、トルク電流指令によって電流制御部を介して制御対象物の位置を制御するものにおいて、
前記制御対象物の位置指令の制御系外に分解能補正処理部を設け、この分解能補正処理部により、制御系外より入力されるインターフェースからの位置指令に依存する角度データが持つ分解能を、前記位置検出器の位置検出分解能相当に補正することを特徴としたものである。
【0022】
本発明の請求項9は、前記分解能補正処理部は、入力されたインターフェースからの位置指令をθ´refとしたとき、[(位置検出器の1回転出力/θ´ref分解能出力)×絶対角変換係数]の演算で制御対象物の位置指令θrefを求めることを特徴としたものである。
【発明の効果】
【0023】
以上のとおり、本発明によれば、制御対象物の停止角度位置が如何なる位置であっても、停止から正転方向,或いは逆転方向への回転でも、任意の指定位置にまで精度良く制御が可能となり、制御対象物と試供体の位置の不一致が解消できるものである。また、一制御装置の制御系外からインターフェースを介して位置制御する場合でも、分解能誤差を生じることなく安定した位置制御が可能となるものである。
【図面の簡単な説明】
【0024】
【図1】本発明の実施例を示す位置制御装置の構成図。
【図2】本発明の回転方向指定指令補正部の位置指令補正のフロー図。
【図3】本発明の他の実施例を示す位置制御装置の構成図。
【図4】本発明の他の実施例を示す位置制御装置の構成図。
【図5】本発明の位置座標系変換部の座標変換処理フロー図。
【図6】本発明の他の実施例を示す位置制御装置の構成図。
【図7】本発明の他の実施例を示す位置制御装置の構成図。
【図8】本発明の分解能補正処理部の補正処理フロー図。
【図9】従来の位置制御装置の構成図。
【図10】位置指令と位置検出を差分とした従来の位置制御装置の構成図。
【図11】位置制御モード(正逆モード)の説明図。
【図12】位置制御モード(1周内偏差分モード)の説明図。
【図13】位置制御モード(180度モード)の説明図。
【発明を実施するための形態】
【0025】
本発明は、制御対象物の位置指令系統に回転方向の指定と指令を補正する手段を設けることで、制御対象物の任意の回転方向を指定し、指令位置までの制御対象物の駆動を行う。また、位置検出器の出力側に位置座標系変換部を設けることで、制御対象物と供試体の原点不一致の解消と位置制御系の外部よりの位置制御を可能とすると共に、分解能補正処理部を設けることで、位置指令の系統外からの位置制御を可能とするものである。以下図に基づいて本発明の実施例を詳述する。
【実施例1】
【0026】
図1は、本発明の第1の実施例を示す構成図で、図9,図10と同一部分、若しくは相当する部分に同一符号を付してその説明を省略する。
20は本発明による回転方向指定指令補正部で、位置指令θrefと遅延回路9によって1サンプル周期遅延させた位置指令の偏差信号Δθrefが入力される。
【0027】
図2は回転方向指定指令補正部20による位置指令補正のためのフロー図で、回転方向設定信号が入力されると、ステップS1で正転方向設定か逆転方向設定かを判断し、正転方向設定の場合には、ステップS2でΔθref≧0か又はΔθref<0かを判断する。Δθref≧0の場合には偏差信号Δθrefをそのまま減算部8に出力するが、Δθref<0の場合には、S3で360度−|Δθref|を演算してその差信号を求める。この差信号を補正した位置指令の偏差信号Δθrefとして減算部8に出力する。
【0028】
一方、ステップS1で位置指令が逆転方向設定と判断したときには、ステップS4でΔθref≦0か又はΔθref>0かを判断する。Δθref≦0のときは偏差信号Δθrefをそのまま減算部8に出力するが、Δθref>0の場合にはステップS5でΔθref−360度の演算を実行し、その偏差を補正した位置指令の偏差信号Δθrefとして減算部8に出力する。
【0029】
つまり、回転方向指定指令補正部20は、位置指令入力が確定する毎に回転方向設定を参照し、設定された正転、又は逆転方向への指令位置で停止するよう位置指令の偏差信号Δθrefを補正して減算部8に出力する。減算部8は、入力された偏差信号Δθrefと遅延回路11により1サンプリング周期遅延させた位置検出の偏差信号Δθdetの差演算を実行し、さらに、その差信号に遅延回路10で積算(1サンプリング周期遅延させた信号を加算)して位置偏差θとし、位置制御部1に入力して速度指令ωrefを生成する。
【0030】
速度制御部2では、速度指令ωrefと速度演算部7により算出された速度検出ωdetの偏差信号を入力してトルク電流指令Trefを演算し、このトルク電流指令Trefに基づいて電流制御部3を介して電動機4を制御する。これにより、
電流制御部3が出力する電流Iは、回転方向指定指令生成部20による位置指令入力が確定する毎に、回転方向設定を参照しながら設定回転方向に対応して補正(又は補正しないで)された位置指令に基づくため、指令設定された回転位置に停止できる。
【0031】
したがって、この実施例によれば、回転方向指定指令補正部20を設け、任意の位置にまで制御対象物である電動機を回転させるとき、回転方向指定指令補正部20に位置指令入力と共に回転方向を指定する信号を入力し、回転方向に応じて偏差信号Δθrefを補正するものである。これにより、前述した課題の(1)が解決でき、任意の回転方向を指定しながら指令位置までの電動機駆動時における機能向上が可能となるものである。
【実施例2】
【0032】
図3は本発明の第2の実施例を示す構成図で、回転方向指定指令補正部20a
は、前回の回転指令と今回の回転指令の偏差が180度以内となる方向へ駆動するよう位置指令の偏差信号Δθrefを補正するものである。そのために、図11等で示す任意の位置A点で停止中の電動機に対して、回転方向指定指令補正部20aは、次のように判断しながら、偏差信号Δθrefを出力する。
(a) 0度<|Δθref|<180度………→Δθrefを出力。
(b) 180度<|Δθref|<360度…→|Δθref|−360度を出力。
(c) 位置指令θrefが180度のとき……→任意の方向へ駆動する。
他は、図1で示す実施例1と同様である。
【0033】
したがって、第2の実施例によれば、位置制御において任意の位置まで電動機を回転させるとき、任意の回転方向に前回の位置指令との偏差180度以内となるよう、入力する指令を分割するものである。これにより、前述した課題の(1)が解決でき、任意の回転方向を指定しながら指令位置までの電動機駆動時における機能向上が可能となるものである。
【実施例3】
【0034】
図4は本発明の第3の実施例を示す構成図で、この実施例は位置検出系に位置座標系変換部21を設けて任意の座標系で位置制御を行うことを可能としたものである。すなわち、電動機4の角速度はエンコーダ5によって検出され、絶対角変換係数部6によって位置検出θdetに変換されて位置座標系変換部21に入力される。位置座標系変換部21は記憶部を備えており、電動機4(ダイナモメータ)が停止している現在の位置を記憶し、その記憶した位置を0度とする座標系が構築されている。
【0035】
ここで、「θ」はエンコーダ5が持つ座標系(ダイナモシステムの座標系)における0〜360度未満の絶対角を示し、「θ´」は任意の位置を0度として構築した座標系における0〜360度未満の絶対角を示す。位置座標系変換部21は、エンコーダ5の出力(絶対角変換係数部6の出力)に対して位置座標系変換を行うことで、制御自体を任意の座標系で行うものである。これにより、制御系外とのインターフェースで用いる座標系は、任意の座標系による絶対角を用いることを可能としたものである。したがって、制御系に入力される位置指令θ´refは、制御系外からの位置指令で、他は図10と同様である。
【0036】
図5は位置座標系変換部21による位置座標系変換処理フロー図を示したものである。
位置座標系変換部21に位置検出θdetが入力されると、ステップS11で位置検出θdetと記憶位置を比較する。その結果、θdet≧記憶位置のときにはステップS12で、[θ´det=θdet−記憶位置]を演算して新座標系位置θ´detに変換し、遅延回路11を介して位置制御系へフィードバックされると共に、速度演算部7に入力される。
【0037】
一方、ステップS11でθdet<記憶位置のときにはステップS13で
[θ´det=360度−記憶位置+θdet]を演算して新座標系位置θ´detに変換する。
【0038】
第3の実施例によれば、任意の位置をゼロ度とした座標系を構築した位置座標系変換部21を設け、エンコーダ5で検出した位置を座標変換することで、任意の座標系で位置制御が可能となるものである。これにより、前述した課題の(2)で述べたダイナモメータと負荷側の0度の不一致(原点不一致)が解消でき、ダイナモメータ駆動時における機能向上と制御性能の向上が可能となるものである。
【実施例4】
【0039】
図6は本発明の第4の実施例を示す構成図で、この実施例は位置制御系のフィードバックループ外に位置座標系変換部21を設けると共に、位置指令の入力側に位置座標系逆変換部22を設けたもので、他は図4と同様である。
位置座標系逆変換部22には、制御系外から入力される電動機制御系(ダイナモシステム)に依存しない任意の座標系による0〜360度未満の絶対角の位置指令θ´refが入力される。
【0040】
すなわち、位置座標系逆変換部22は、位置記憶信号などによるイベントの発生を受けてダイナモメータの位置を記憶し、記憶した位置を0度とする新座標系を構築する。新座標系の構築後に、入力された位置指令θ´refは位置座標系逆変換部22においてエンコーダ座標系の位置指令θrefに変換され、以下、図10と同様に位置制御される。
【0041】
一方、位置制御系のフィードバックループ外に設けられた位置座標系変換部21は、位置検出θdetを入力し、図5で示す処理フローにしたがって新座標系位置θ´detに変換するが、θ´detは、モニタ等の外部出力用インターフェース12に出力される。これにより、ダイナモメータ外部からは任意の点を0度とした座標系による制御が可能となる。
【0042】
したがって、第4の実施例によれば、任意の位置を0度とした新座標系を構築し、新座標系により入力された位置指令をエンコーダ検出座標系へ変換すると共に、外部出力用インターフェースにおいてエンコーダ検出座標系による位置検出を新座標系へ変換したものである。これにより、ダイナモメータがあたかも任意の位置を0度として位置制御を行っているとみなすことが可能となり、前述した課題の(2)で述べたダイナモメータと負荷側の0度の不一致(原点不一致)が解消でき、ダイナモメータ駆動時における機能向上が可能となるものである。
【実施例5】
【0043】
図7は本発明の第5の実施例を示す構成図で、制御系の入力側に分解能補正処理部23を設けたものである。他は図10と同様に構成される。
図7で示す「θ」と「θ´」はそれぞれの角度データが持つ分解能を基準としたもので、「θ」はエンコーダ5が持つ分解能(パルス数等に依存)の機械角データを示し、また、「θ´」は入力された制御指令が持つ分解能(制御系外とのインターフェースのデータ幅に依存)の機械角データを示す。
【0044】
分解能補正処理部23は、制御系外から位置指令θ´refが入力すると検出に用いられるエンコーダ5のパルス換算値相当に変換する。ここで、エンコーダ5のパルス換算値相当とは、電動機4が0から指令位置にまで正転した時のエンコーダ出力値をパルス変換した値である。例えば、256歯のギヤを持つインクリメンタルエンコーダを用いたとき、180度の位置指令は512pp(256歯×4逓倍×(180度/360度))相当となる。このエンコーダパルス換算値に対して、検出部で用いるエンコーダ出力値から絶対角への絶対角変換係数と同様の係数を用いて再度絶対角を求めることで位置指令θrefと位置検出θdetの分解能を同じものとする。図8は、分解能補正処理部23によるフロー図である。
【0045】
第5の実施例によれば、位置指令と位置検出が異なる分解能であるとき、位置指令に対してエンコーダ出力値相当に変換し、さらに位置検出と同様の係数を用いて絶対角へ再度変換することで、位置指令と位置検出分解能差を無くするものである。これにより、前述した課題の(3)で述べた分解能差分値が残ることにより発生する位置制御出力の速度指令の脈動が抑えられ、安定した位置制御が可能となるものである。
【符号の説明】
【0046】
1… 位置制御部
2… 速度制御部
3… 電流制御部
4… 電動機(ダイナモメータ)
5… 位置検出器(エンコーダ)
6… 絶対角変換係数
7… 速度演算部
20…回転方向指定指令補正部
21…位置座標系変換部
22…位置座標系逆変換部
23…分解能補正処理部
【特許請求の範囲】
【請求項1】
制御対象の位置指令とこの位置指令から1サンプル周期遅延させた位置指令の偏差信号Δθrefと、位置検出器を介して検出された電動機の位置検出とこの位置検出から1サンプル周期遅延させた位置検出の偏差信号Δθdetとの位置偏差θを求め、位置偏差θに応じた速度指令ωrefと位置検出θdetに応じた位置速度検出ωdetの偏差によってトルク電流指令を生成し、トルク電流指令によって電流制御部を介して制御対象の位置を制御するものにおいて、
前記位置指令の偏差信号Δθrefと回転方向設定を入力して回転方向に対応して補正された偏差信号Δθrefを出力する回転方向指定指令補正部を設け、この回転方向指定指令補正部で補正された偏差信号Δθrefと前記偏差信号Δθdetとの位置偏差θを求めるよう構成したことを特徴とした電動機の位置制御装置。
【請求項2】
前記回転方向指定指令補正部は、回転方向設定が正転方向時に入力された偏差信号Δθrefの値が[Δθref<0]のときに360度−|Δθref|の位置の補正信号を出力し、[Δθref<0]以外のときに入力された偏差信号Δθrefを出力すると共に、回転方向設定が逆転方向時に入力された偏差信号Δθrefの値が[Δθref>0]のときに[Δθref−360度]の位置の補正信号を出力し、[Δθref>0]以外のときに入力された偏差信号Δθrefを出力する構成したことを特徴とした請求項1記載の電動機の位置制御装置。
【請求項3】
制御対象の位置指令とこの位置指令から1サンプル周期遅延させた位置指令の偏差信号Δθrefと、位置検出器を介して検出された電動機の位置検出とこの位置検出から1サンプル周期遅延させた位置検出の偏差信号Δθdetとの位置偏差θを求め、位置偏差θに応じた速度指令ωrefと位置検出θdetに応じた位置速度検出ωdetの偏差によってトルク電流指令を生成し、トルク電流指令によって電流制御部を介して制御対象の位置を制御するものにおいて、
前記位置指令の偏差信号Δθrefを入力し、前回の回転指令と今回の回転指令の偏差が180度以内となる方向へ駆動するよう位置指令の偏差信号Δθrefを補正する回転方向指定指令補正部を設けたことを特徴とした電動機の位置制御装置。
【請求項4】
前記回転方向指定指令補正部は、前回位置指令と今回位置指令との関係で、0度<|Δθref|<180度のときにΔθrefの信号を出力し、[180度<|Δθref|<360度]のときに[|Δθref|−360度]の補正信号を出力し、且つ位置指令が180度のときに任意の方向への駆動信号を出力するよう構成したことを特徴とした請求項3記載の電動機の位置制御装置。
【請求項5】
制御対象の位置指令とこの位置指令から1サンプル周期遅延させた位置指令の偏差信号Δθrefと、位置検出器を介して検出された電動機の位置検出とこの位置検出から1サンプル周期遅延させた位置検出の偏差信号Δθdetとの位置偏差θを求め、位置偏差θに応じた速度指令ωrefと位置検出θdetに応じた位置速度検出ωdetの偏差によってトルク電流指令を生成し、トルク電流指令によって電流制御部を介して制御対象の位置を制御するものにおいて、
前記位置検出器の出力側に位置座標系変換部を設け、この位置座標系変換部によって制御対象電動機の任意検出θdetを記憶し、記憶した任意の位置(記憶位置)を0度とした新たな座標系における0〜360度未満の絶対角に変換して、前記位置偏差θを算出するよう構成したことを特徴とした電動機の位置制御装置。
【請求項6】
前記位置座標系変換部は、前記記憶位置と前記位置検出器からの位置検出θdetの関係が[θdet≧記憶位置]のときに[θ´det=θdet−記憶位置]の変換信号を出力し、[θdet<記憶位置]のときに[θ´det=360度−記憶位置+θdet]の変換信号を出力することを特徴とした請求項5記載の電動機の位置制御装置。
【請求項7】
制御対象の位置指令とこの位置指令から1サンプル周期遅延させた位置指令の偏差信号Δθrefと、位置検出器を介して検出された制御対象の位置検出とこの位置検出から1サンプル周期遅延させた位置検出の偏差信号Δθdetとの位置偏差θを求め、位置偏差θに応じた速度指令ωrefと位置検出θdetに応じた位置速度検出ωdetの偏差によってトルク電流指令を生成し、トルク電流指令によって電流制御部を介して制御対象の位置を制御するものにおいて、
前記位置検出器の出力側に位置座標系変換部を設け、この位置座標系変換部によって制御対象の任意検出θdetを記憶し、記憶した任意の位置(記憶位置)を0度とした新たな座標系における0〜360度未満の絶対角に変換し、この変換信号を制御系外部のインターフェースに出力すると共に、
前記制御対象の位置指令の制御系外に位置座標系逆変換部を設け、この位置座標系逆変換部によってイベント発生時の制御対象位置を記憶し、記憶した任意位置を0度として前記位置検出器の座標系位置指令θrefに変換し、前記制御対象の位置指令とすることを特徴とした電動機の位置制御装置。
【請求項8】
制御対象の位置指令とこの位置指令から1サンプル周期遅延させた位置指令の偏差信号Δθrefと、位置検出器を介して検出された制御対象の位置検出とこの位置検出から1サンプル周期遅延させた位置検出の偏差信号Δθdetとの位置偏差θを求め、位置偏差θに応じた速度指令ωrefと位置検出θdetに応じた位置速度検出ωdetの偏差によってトルク電流指令を生成し、トルク電流指令によって電流制御部を介して制御対象の位置を制御するものにおいて、
前記制御対象の位置指令の制御系外に分解能補正処理部を設け、この分解能補正処理部により、制御系外より入力されるインターフェースからの位置指令に依存する角度データが持つ分解能を、前記位置検出器の位置検出分解能相当に補正することを特徴とした電動機の位置制御装置。
【請求項9】
前記分解能補正処理部は、入力されたインターフェースからの位置指令をθ´refとしたとき、[(位置検出器の1回転出力/θ´ref分解能出力)×絶対角変換係数]の演算で制御対象の位置指令θrefを求めることを特徴とした請求項8記載の電動機の位置制御装置。
【請求項1】
制御対象の位置指令とこの位置指令から1サンプル周期遅延させた位置指令の偏差信号Δθrefと、位置検出器を介して検出された電動機の位置検出とこの位置検出から1サンプル周期遅延させた位置検出の偏差信号Δθdetとの位置偏差θを求め、位置偏差θに応じた速度指令ωrefと位置検出θdetに応じた位置速度検出ωdetの偏差によってトルク電流指令を生成し、トルク電流指令によって電流制御部を介して制御対象の位置を制御するものにおいて、
前記位置指令の偏差信号Δθrefと回転方向設定を入力して回転方向に対応して補正された偏差信号Δθrefを出力する回転方向指定指令補正部を設け、この回転方向指定指令補正部で補正された偏差信号Δθrefと前記偏差信号Δθdetとの位置偏差θを求めるよう構成したことを特徴とした電動機の位置制御装置。
【請求項2】
前記回転方向指定指令補正部は、回転方向設定が正転方向時に入力された偏差信号Δθrefの値が[Δθref<0]のときに360度−|Δθref|の位置の補正信号を出力し、[Δθref<0]以外のときに入力された偏差信号Δθrefを出力すると共に、回転方向設定が逆転方向時に入力された偏差信号Δθrefの値が[Δθref>0]のときに[Δθref−360度]の位置の補正信号を出力し、[Δθref>0]以外のときに入力された偏差信号Δθrefを出力する構成したことを特徴とした請求項1記載の電動機の位置制御装置。
【請求項3】
制御対象の位置指令とこの位置指令から1サンプル周期遅延させた位置指令の偏差信号Δθrefと、位置検出器を介して検出された電動機の位置検出とこの位置検出から1サンプル周期遅延させた位置検出の偏差信号Δθdetとの位置偏差θを求め、位置偏差θに応じた速度指令ωrefと位置検出θdetに応じた位置速度検出ωdetの偏差によってトルク電流指令を生成し、トルク電流指令によって電流制御部を介して制御対象の位置を制御するものにおいて、
前記位置指令の偏差信号Δθrefを入力し、前回の回転指令と今回の回転指令の偏差が180度以内となる方向へ駆動するよう位置指令の偏差信号Δθrefを補正する回転方向指定指令補正部を設けたことを特徴とした電動機の位置制御装置。
【請求項4】
前記回転方向指定指令補正部は、前回位置指令と今回位置指令との関係で、0度<|Δθref|<180度のときにΔθrefの信号を出力し、[180度<|Δθref|<360度]のときに[|Δθref|−360度]の補正信号を出力し、且つ位置指令が180度のときに任意の方向への駆動信号を出力するよう構成したことを特徴とした請求項3記載の電動機の位置制御装置。
【請求項5】
制御対象の位置指令とこの位置指令から1サンプル周期遅延させた位置指令の偏差信号Δθrefと、位置検出器を介して検出された電動機の位置検出とこの位置検出から1サンプル周期遅延させた位置検出の偏差信号Δθdetとの位置偏差θを求め、位置偏差θに応じた速度指令ωrefと位置検出θdetに応じた位置速度検出ωdetの偏差によってトルク電流指令を生成し、トルク電流指令によって電流制御部を介して制御対象の位置を制御するものにおいて、
前記位置検出器の出力側に位置座標系変換部を設け、この位置座標系変換部によって制御対象電動機の任意検出θdetを記憶し、記憶した任意の位置(記憶位置)を0度とした新たな座標系における0〜360度未満の絶対角に変換して、前記位置偏差θを算出するよう構成したことを特徴とした電動機の位置制御装置。
【請求項6】
前記位置座標系変換部は、前記記憶位置と前記位置検出器からの位置検出θdetの関係が[θdet≧記憶位置]のときに[θ´det=θdet−記憶位置]の変換信号を出力し、[θdet<記憶位置]のときに[θ´det=360度−記憶位置+θdet]の変換信号を出力することを特徴とした請求項5記載の電動機の位置制御装置。
【請求項7】
制御対象の位置指令とこの位置指令から1サンプル周期遅延させた位置指令の偏差信号Δθrefと、位置検出器を介して検出された制御対象の位置検出とこの位置検出から1サンプル周期遅延させた位置検出の偏差信号Δθdetとの位置偏差θを求め、位置偏差θに応じた速度指令ωrefと位置検出θdetに応じた位置速度検出ωdetの偏差によってトルク電流指令を生成し、トルク電流指令によって電流制御部を介して制御対象の位置を制御するものにおいて、
前記位置検出器の出力側に位置座標系変換部を設け、この位置座標系変換部によって制御対象の任意検出θdetを記憶し、記憶した任意の位置(記憶位置)を0度とした新たな座標系における0〜360度未満の絶対角に変換し、この変換信号を制御系外部のインターフェースに出力すると共に、
前記制御対象の位置指令の制御系外に位置座標系逆変換部を設け、この位置座標系逆変換部によってイベント発生時の制御対象位置を記憶し、記憶した任意位置を0度として前記位置検出器の座標系位置指令θrefに変換し、前記制御対象の位置指令とすることを特徴とした電動機の位置制御装置。
【請求項8】
制御対象の位置指令とこの位置指令から1サンプル周期遅延させた位置指令の偏差信号Δθrefと、位置検出器を介して検出された制御対象の位置検出とこの位置検出から1サンプル周期遅延させた位置検出の偏差信号Δθdetとの位置偏差θを求め、位置偏差θに応じた速度指令ωrefと位置検出θdetに応じた位置速度検出ωdetの偏差によってトルク電流指令を生成し、トルク電流指令によって電流制御部を介して制御対象の位置を制御するものにおいて、
前記制御対象の位置指令の制御系外に分解能補正処理部を設け、この分解能補正処理部により、制御系外より入力されるインターフェースからの位置指令に依存する角度データが持つ分解能を、前記位置検出器の位置検出分解能相当に補正することを特徴とした電動機の位置制御装置。
【請求項9】
前記分解能補正処理部は、入力されたインターフェースからの位置指令をθ´refとしたとき、[(位置検出器の1回転出力/θ´ref分解能出力)×絶対角変換係数]の演算で制御対象の位置指令θrefを求めることを特徴とした請求項8記載の電動機の位置制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2013−106422(P2013−106422A)
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願番号】特願2011−248138(P2011−248138)
【出願日】平成23年11月14日(2011.11.14)
【出願人】(000006105)株式会社明電舎 (1,739)
【Fターム(参考)】
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願日】平成23年11月14日(2011.11.14)
【出願人】(000006105)株式会社明電舎 (1,739)
【Fターム(参考)】
[ Back to top ]