
電動機の駆動制御方法
【課題】モータが負荷保持停止位置で停止する時間を各相コイルで均一になるように駆動制御することで、各相コイルの発熱温度を均一化させた電動機の駆動制御方法を提供する。
【解決手段】制御回路7はモータコイル3に通電状態で、かつロータ2が負荷保持状態で回転停止させたロータ2の回転停止位置である負荷保持停止位置を、前回ロータ2が回転停止した負荷保持停止位置に対して電気角で((180/n)°;nは相数であり、2以上の整数)だけ所定回転方向にロータ2を回転させた位置で停止させる。
【解決手段】制御回路7はモータコイル3に通電状態で、かつロータ2が負荷保持状態で回転停止させたロータ2の回転停止位置である負荷保持停止位置を、前回ロータ2が回転停止した負荷保持停止位置に対して電気角で((180/n)°;nは相数であり、2以上の整数)だけ所定回転方向にロータ2を回転させた位置で停止させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電動機の駆動制御方法に関する。
【背景技術】
【0002】
電動機にはロータとステータが設けられている。ステータには、モータコイルがインシュレータを介してティース部に巻きつけられるステータコアが設けられている。
例えば車両用に用いられる電動機は、クラッチやブレーキなどに用いられておりモータの回転運動を負荷に対する直線運動に変換して伝達するようになっている。
【0003】
例えば、クラッチの踏み込み量に応じて電動モータを駆動してアシスト部材を進退動させてクラッチ板を押し当ててクラッチを接続したりあるいはクラッチの接続を解除したりするクラッチ機構や、ブレーキペダルの踏み込み量に応じて電動モータを駆動することでアシスト部材を進退動させてマスタシリンダにブレーキ液圧を作用させるブレーキ機構などが提案されている。
【0004】
上記クラッチシステムやブレーキシステムにおいては、ペダルを押し込んだ状態、例えば3相の電動モータのモータコイルに通電したままの状態(負荷保持状態)で回転停止状態を維持することがあり、各相電流のうち特定の1相だけ通電電流が大きくなるおそれがある。このような電動モータの温度上昇をサーミスタ等の温度センサを1個設けて、各相コイルの温度を演算により推定し、特定の相のコイル温度が所定値より上がりすぎた場合には最も大きな電流が流れる相の電流値(絶対値)をピーク値より外れるように回転位置を移動するように駆動制御する。具体的には、例えばモータ停止状態でW相に大電流が流れる場合、W相のピーク値より低下したV相と同等の電流値となりU相電流が零となる位置まで更に回転させることでW相のコイルの温度上昇を防ぐことができる(特許文献1参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2009−220807号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
上述したモータ駆動装置においては、負荷保持するためモータを停止すると各相コイル温度が異なる可能性が高い。したがって、熱劣化により製品寿命が短くなる可能性が高い。また、モータハウジングに設けた温度センサよりコイル間の熱伝達特性を利用して温度検出を行なっているが、熱伝達のばらつきにより温度の検出誤差が発生し易い。また、温度センサの検出温度により各相コイルの温度を演算により推定する温度推定処理を行なっており、複雑な演算処理が必要になり制御動作が複雑になるうえに、温度センサを設ける分だけ部品コストも嵩む。
【0007】
本発明はこれらの課題を解決すべくなされたものであり、その目的とするところは、モータが負荷保持停止位置で停止する時間を各相コイルで均一になるように駆動制御することで、各相コイルの発熱温度を均一化させた電動機の駆動制御方法を提供することにある。
【課題を解決するための手段】
【0008】
本発明は上記目的を達成するため、次の構成を備える。
多相モータをアシスト機構の駆動源として用いる電動機の駆動制御方法であって、前記多相モータとそのモータ駆動回路を含む制御回路を具備し、前記制御回路はモータコイルに通電状態で、かつロータが負荷保持状態で回転停止させたロータの回転停止位置である負荷保持停止位置を、前回ロータが回転停止した負荷保持停止位置に対して電気角で((180/n)°;nは相数であり、2以上の整数)だけ所定回転方向にロータを回転させた位置で停止させることを特徴とする。
【0009】
また、特定の負荷保持停止位置からロータを所定回転させて前記特定の負荷保持停止位置に戻るまでを1サイクルとして、そのサイクルを1回若しくは複数回繰り返す間の、各相コイルへの通電時間の総和が同一になるよう駆動制御することを特徴とする。
【0010】
また、前記負荷保持停止位置は、いずれかの相が最大電流となる電気角に対応するロータ回転停止位置であることを特徴とする。
【0011】
また、前記制御回路は、位置センサによって検出したモータの直前停止位置を基準として、回転センサにより検出したロータ位置に応じてモータ駆動回路を通じて通電制御することで、直前停止位置に対してモータを所定角度回転させて停止するように制御することを特徴とする。
【発明の効果】
【0012】
上述した電動機の駆動制御方法を用いれば、直前停止位置に対して電気角で(180/n;nは相数であり、2以上の整数)だけ回転方向に回転させた負荷保持停止位置で停止させることで、特定の負荷保持停止位置からロータを所定回転させて、その特定の負荷保持停止位置に戻るまでを1サイクルとして、その1サイクル間の通電範囲内でロータが停止する負荷保持停止位置において各相コイルへの通電時間の総和が同一になるように駆動制御するので、特定相のモータコイルが温度上昇することを簡易な構成で回避することができ、温度センサを設けなくても温度制御可能になるのでシステムの簡素化、制御動作の簡素化を図ることができ、温度センサが不要であるので熱伝達特性のばらつきの影響も受けないので、使用環境にも影響されない。
【図面の簡単な説明】
【0013】
【図1】電動機の駆動制御回路のブロック構成図である。
【図2】電動機の負荷保持停止動作パターンを示すタイムチャート図である。
【図3】電動機の負荷保持状態における電気角ごとのサイクル数を示す表図である。
【図4】他例に係る電動機の負荷保持停止動作パターンを示すタイムチャート図である。
【図5】他例に係る電動機の負荷保持状態における電気角ごとのサイクル数を示す表図である。
【図6】U相コイルの温度上昇試験結果を示すグラフ図である。
【図7】各相コイルの電流波形と電気角との関係を示すグラフ図である。
【図8】比較例に係る電動機の負荷保持停止動作パターンを示すタイムチャート図である。
【図9】比較例に係る電動機の負荷保持状態における電気角ごとのサイクル数を示す表図である。
【図10】特定の負荷保持位置のコイルの温度上昇を示すグラフ図である。
【発明を実施するための形態】
【0014】
以下、本発明に係る電動機駆動制御方法の実施形態について、添付図面を参照しながら説明する。本実施形態では、電動機として車載用の三相DCブラシレスモータを用いた駆動制御方法について例示する。
【0015】
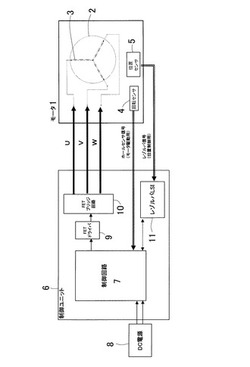
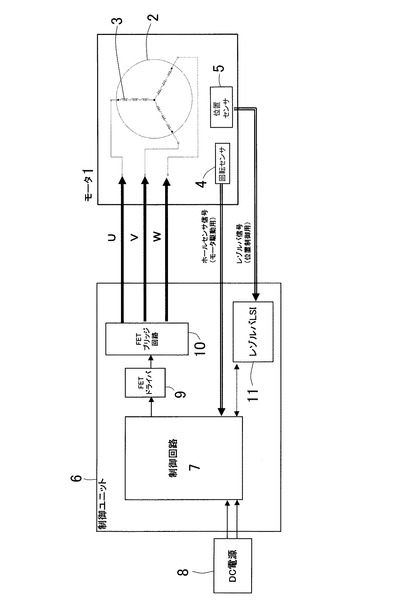
図1のブロック図を参照して、電動機の概略構成について説明する。
電動モータ1は、クラッチペダルの踏み込み力をアシストする動力を発生させる。クラッチペダルの踏み込み動作及び戻り動作に応じて電動モータ1が正逆回転駆動することで、アシスト機構を構成するボールねじを介してクラッチ板どうしを接離動させる回転‐直線運動に変換することによりクラッチの接続・接続解除が行われる。このクラッチペダルを踏み込んで電動モータ1に通電したまま停止状態となる(負荷保持停止状態)ことで、特定相のモータコイル3に最大電流が流れて加熱損傷するおそれがある。
【0016】
ロータ2は、図示しないシャフトにロータマグネットが一体に組み付けられて回転可能に軸支されている。ロータマグネットはシャフトの中途部に一体に組み付けられ、両側を軸受部(ボールベアリング)により回転可能に支持されている。
【0017】
図示しないロータマグネットと対向配置されたステータコアには、三相(U相,V相,W相)のモータコイル3が巻き付けられている。各相モータコイル3は、後述する制御回路により所定のタイミングでモータ電流が流れる。本実施例では、各相モータコイル3はY結線されている。尚、モータコイル3の結線方法はY結線に限定されるものではなく、デルタ結線でも本発明を実施できることは言うまでもない。
【0018】
ロータマグネットの磁極位置を回転センサ(ホールセンサ)4により検出することによりロータ2の回転位置が検出される。また、電動モータ1の回転変位から、車体に対するクラッチ板の絶対変位を検出する位置センサ(レゾルバ)5が設けられている。
【0019】
上記回転センサ4及び位置センサ5は制御ユニット6(車載用ECU)に接続されている。制御ユニット6は、CPU,ROM,RAMなどの各種制御素子を備えた制御回路7により電動モータ1の駆動を制御する。制御回路7は、バッテリーなどの直流電源8より直流電源電圧が供給されて動作する。
回転センサ4で検出された検出信号は制御回路7に供給される。制御回路7は、ロータ回転位置に応じて、FETドライバ9を通じてFETブリッジ回路10を通じて各相モータコイル3のうちいずれか2相に電流方向を変えて流すことにより、ロータ2の回転を付勢するように通電制御する。
【0020】
また、レゾルバLSI(大規模集積回路)11は、位置センサ5の検出信号から、駆動停止した電動モータ1の回転角を検出する。このレゾルバLSI11によって検出した回転角位置を基準として、制御回路7はFETドライバ9を通じてFETブリッジ回路10を通じてロータ2の回転位置が所定位置になるように回転制御する。
【0021】
具体的には、三相モータの各相モータコイル3に通電状態でロータ2の回転が負荷保持状態で停止したときに、当該各相モータコイル3に供給される各相電流が、任意の直前停止位置に対して電気角で60°(180/n;nは相数であって、2以上の整数)だけ所定回転方向(正転若しくは逆転方向)に回転させて停止させるように制御する。
【0022】
これにより特定の負荷保持停止位置からロータ2を所定回転させて、その特定の負荷保持停止位置に戻るまでを1サイクルとして、その1サイクル間の通電範囲内で各停止位置において停止する時間の総和が同一になるように駆動制御する。尚、1サイクルに限らず、複数サイクル間に停止する時間の総和が同一になるように駆動制御するものでも良い。
U,V,Wの各相コイルの発熱量Qは、抵抗値R,電流値I,通電時間tとすると、Q=0.24×I2Rtで与えられる。
【0023】
よって、上述した1サイクル若しくは複数サイクル間の通電範囲内で各停止位置における停止時間tが同一であれば、U,V,Wの各相コイルに流れる電流が順番に最大となり発熱量Qが平均化される。よって、基準位置は不問であり、任意の直前停止位置に対して三相の場合、可変電気角を60°×N(Nは整数であって3の倍数を除く)とすることで、発熱量Qを平均化することができる。
【0024】
尚、可変電気角を60°×3N(Nは整数)では、同相コイルに流れる電流の向きが変わるだけで同じ電流値が流れたまま停止するため特定相のモータコイル3の発熱量Qが増大する。
【0025】
以下、通電動作パターン例について図2乃至図6を参照して説明する。
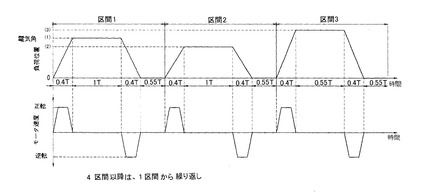
図2は、三相モータコイル3において、1サイクル回転する間に停止する負荷保持停止位置(1)〜(3)についての停止時間を示すタイミングチャートである。尚、1サイクルとは例えば負荷保持停止位置(1)からロータを所定回転させて、再び負荷保持停止位置(1)に戻るまでをいう。もちろん負荷保持停止位置(2)や(3)をサイクル開始・終了としても良い。
クラッチペダルの踏み込み動作と戻り動作が繰り返し行われるため、踏み込み時を正回転とすると戻り時には逆回転となる。
【0026】
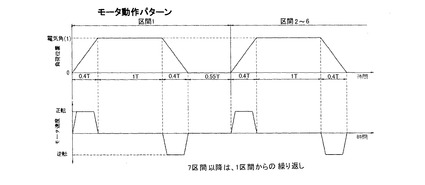
例えば電気角(1)〜(3)はロータ停止位置が電気角で60°ずつ位置ずれした負荷保持停止位置とすると、図2の通電動作パターンは、三相モータの場合は電気角で60°回転するごとに通電パターンが切り替わる6パターンあり、Tを所定の時間単位とすると、1回目の負荷保持停止位置はU相コイルに通電状態で1T停止し、2回目の負荷保持停止位置はV相コイルに通電状態で1T停止し、3回目の負荷保持停止位置はW相コイルに通電状態で1T停止する通電パターンを繰り返す場合を示す。
【0027】
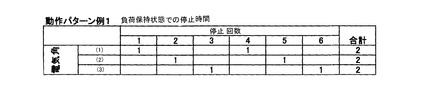
図3は2サイクル間の通電範囲内で、各相の負荷保持停止位置に停止した回数を示す表図である。各相の負荷保持停止位置に停止した回数は2回と等しく、各相コイルの発熱量も均一化することができる。
【0028】
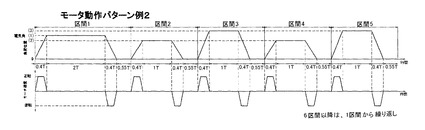
図4は、他例に係る三相モータコイル3において、1サイクル間に停止する負荷保持停止位置(1)〜(3)についての停止時間を示すタイミングチャートである。
クラッチペダルの踏み込み動作と戻り動作が繰り返し行われるため、踏み込み時を正回転とすると戻り時には逆回転となるのは同様である。
【0029】
例えば電気角(1)〜(3)をロータ停止位置が電気角で60°ずつ位置ずれした負荷保持停止位置とすると、図4の通電動作パターンは、1回目の負荷保持停止位置はU相コイルに通電状態で2T停止し、2回目の負荷保持停止位置はV相コイルに通電状態で1T停止し、3回目の負荷保持停止位置はW相コイルに通電状態で1T停止し、4回目の負荷保持停止位置はV相コイルに通電状態で1T停止し、5回目の負荷保持停止位置はW相コイルに通電状態で1T停止するパターンを繰り返す場合を示す。
【0030】
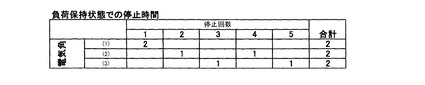
図5は電気角で1サイクル間の通電範囲内で、各相の負荷保持停止位置に停止した回数を示す表図である。各相の負荷保持停止位置に停止した回数は2回と等しく、各相コイルの発熱量も均一化することができる。
車両運転手らの操作(クラッチペダルの踏み込み動作・戻り動作など)により、必ずしも電気角(1)〜(3)に対応する負荷保持停止位置に同じ時間停止(電流を通電)するとは限らないが、この実施例のように電気角(1)の通電時間が長いならば、電気角(1)に対応する負荷保持停止位置を一度通過するようにして、他の電気角の停止回数(停止時間)を増やすよう制御し、結果として1サイクル中での各相の負荷保持停止位置に停止した回数は2回と等しくして、各相コイルの発熱量も均一化することができる。
また、車両運転手らの操作の回数が増すほど、電気角(1)〜(3)に対応する負荷保持停止位置に停止する回数が増えることから、確率的に各相コイルの発熱量は均一化されることになる。
【0031】
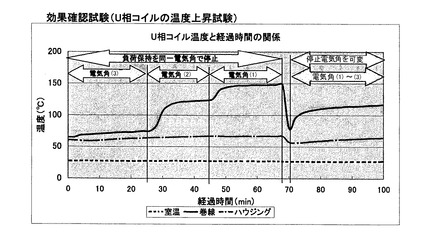
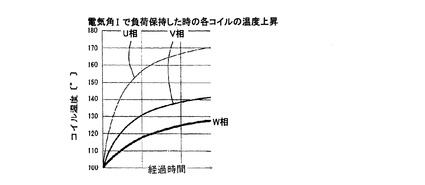
図6はU相コイルの温度上昇試験を行なった結果を示すグラフ図である。
左半図は電気角(3)から(1)に対応する負荷保持停止位置を維持した場合のU相コイルの温度上昇の経時変化を示す。なお、各負荷保持停止位置を維持して、温度上昇がある程度収まってから次の負荷保持停止位置に回転させて停止するようにしている。時間経過とともに、U相コイルの温度上昇が増大することが分かる。これに対して、右半図の本願発明のように基準位置を決めないで直前停止位置から所定時間で順次所定量だけ回転させた負荷保持停止位置において可変停止する場合には、負荷保持停止位置が変わることで各相コイルにおけるトータルの通電時間が均一になるため、U相の温度上昇が抑えられることが分かる。尚、ここでは実験のため、車両運転手らの操作動作ではなくプログラム的に一定時間で負荷保持停止位置を回転させている。
【0032】
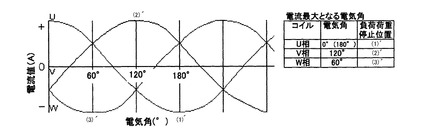
これまで説明してきた電気角(1)〜(3)は任意の電気角であり、それぞれが(180/n)°(nは相数であって、2以上の整数)ずつ回転していればどこで停止させてもよいが、図7のように電気角(1)´〜(3)´でも良い。
図7は三相コイルにおいて最大電流となる電気角を示す波形図である。U相の電気角(1)´を0°とすると、V相の電気角(2)´は電気角で120°回転した位置、W相の電気角(3)´は電気角で60°回転した位置となる。この電気角(1)´〜(3)´に対応する負荷保持停止位置を用いて図2〜図5において説明した制御を行っても良い。
【0033】
一方、図8乃至図10は、本願発明の対比例を示すもので、特定相のコイルに負荷保持停止状態を決めたときの各相コイルの経時的な温度変化を説明する対比図である。
図8はU相コイルを負荷保持停止位置に決めた場合の、6サイクル間に負荷保持停止位置(1)における停止時間を示すタイミングチャートである。
図8の通電動作パターンは、1回目の負荷保持停止位置はU相コイルに通電状態で1T停止し、その後ロータ回転位置に応じてV相コイル乃至W相コイルに通電している時でもU相コイルへ通電する負荷保持停止位置(1)まで回転して停止するため以降はこのパターンを繰り返すことになる。
【0034】
図9は6サイクル間の通電範囲内で、U相の負荷保持停止位置に停止した回数を示す表図である。通電パターンが異なる1〜6のサイクルにおいていずれもU相の負荷保持停止位置(1)に停止するため、停止回数は6回となる。
【0035】
このため、負荷保持停止位置(1)がU相コイルのみに偏っているため、図10に示す各相コイルの発熱量は、U相コイルの温度上昇が他相コイルよりも増大してしまう。
【0036】
上述した負荷保持停止位置における各相コイルへの通電時間や通電パターンは任意であり、変更することが可能である。
また、本実施例では三相モータについて説明したが、二相モータ、四相モータ等であっても良い。
また、電動モータは、インナーロータ型のDCブラシレスモータであってもアウターロータ型のDCブラシレスモータであってもいずれでもよい。
【符号の説明】
【0037】
1 電動モータ
2 ロータ
3 モータコイル
4 回転センサ
5 位置センサ
6 制御ユニット
7 制御回路
8 直流電源
9 FETドライバ
10 FETブリッジ回路
11 レゾルバLSI
【技術分野】
【0001】
本発明は、電動機の駆動制御方法に関する。
【背景技術】
【0002】
電動機にはロータとステータが設けられている。ステータには、モータコイルがインシュレータを介してティース部に巻きつけられるステータコアが設けられている。
例えば車両用に用いられる電動機は、クラッチやブレーキなどに用いられておりモータの回転運動を負荷に対する直線運動に変換して伝達するようになっている。
【0003】
例えば、クラッチの踏み込み量に応じて電動モータを駆動してアシスト部材を進退動させてクラッチ板を押し当ててクラッチを接続したりあるいはクラッチの接続を解除したりするクラッチ機構や、ブレーキペダルの踏み込み量に応じて電動モータを駆動することでアシスト部材を進退動させてマスタシリンダにブレーキ液圧を作用させるブレーキ機構などが提案されている。
【0004】
上記クラッチシステムやブレーキシステムにおいては、ペダルを押し込んだ状態、例えば3相の電動モータのモータコイルに通電したままの状態(負荷保持状態)で回転停止状態を維持することがあり、各相電流のうち特定の1相だけ通電電流が大きくなるおそれがある。このような電動モータの温度上昇をサーミスタ等の温度センサを1個設けて、各相コイルの温度を演算により推定し、特定の相のコイル温度が所定値より上がりすぎた場合には最も大きな電流が流れる相の電流値(絶対値)をピーク値より外れるように回転位置を移動するように駆動制御する。具体的には、例えばモータ停止状態でW相に大電流が流れる場合、W相のピーク値より低下したV相と同等の電流値となりU相電流が零となる位置まで更に回転させることでW相のコイルの温度上昇を防ぐことができる(特許文献1参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2009−220807号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
上述したモータ駆動装置においては、負荷保持するためモータを停止すると各相コイル温度が異なる可能性が高い。したがって、熱劣化により製品寿命が短くなる可能性が高い。また、モータハウジングに設けた温度センサよりコイル間の熱伝達特性を利用して温度検出を行なっているが、熱伝達のばらつきにより温度の検出誤差が発生し易い。また、温度センサの検出温度により各相コイルの温度を演算により推定する温度推定処理を行なっており、複雑な演算処理が必要になり制御動作が複雑になるうえに、温度センサを設ける分だけ部品コストも嵩む。
【0007】
本発明はこれらの課題を解決すべくなされたものであり、その目的とするところは、モータが負荷保持停止位置で停止する時間を各相コイルで均一になるように駆動制御することで、各相コイルの発熱温度を均一化させた電動機の駆動制御方法を提供することにある。
【課題を解決するための手段】
【0008】
本発明は上記目的を達成するため、次の構成を備える。
多相モータをアシスト機構の駆動源として用いる電動機の駆動制御方法であって、前記多相モータとそのモータ駆動回路を含む制御回路を具備し、前記制御回路はモータコイルに通電状態で、かつロータが負荷保持状態で回転停止させたロータの回転停止位置である負荷保持停止位置を、前回ロータが回転停止した負荷保持停止位置に対して電気角で((180/n)°;nは相数であり、2以上の整数)だけ所定回転方向にロータを回転させた位置で停止させることを特徴とする。
【0009】
また、特定の負荷保持停止位置からロータを所定回転させて前記特定の負荷保持停止位置に戻るまでを1サイクルとして、そのサイクルを1回若しくは複数回繰り返す間の、各相コイルへの通電時間の総和が同一になるよう駆動制御することを特徴とする。
【0010】
また、前記負荷保持停止位置は、いずれかの相が最大電流となる電気角に対応するロータ回転停止位置であることを特徴とする。
【0011】
また、前記制御回路は、位置センサによって検出したモータの直前停止位置を基準として、回転センサにより検出したロータ位置に応じてモータ駆動回路を通じて通電制御することで、直前停止位置に対してモータを所定角度回転させて停止するように制御することを特徴とする。
【発明の効果】
【0012】
上述した電動機の駆動制御方法を用いれば、直前停止位置に対して電気角で(180/n;nは相数であり、2以上の整数)だけ回転方向に回転させた負荷保持停止位置で停止させることで、特定の負荷保持停止位置からロータを所定回転させて、その特定の負荷保持停止位置に戻るまでを1サイクルとして、その1サイクル間の通電範囲内でロータが停止する負荷保持停止位置において各相コイルへの通電時間の総和が同一になるように駆動制御するので、特定相のモータコイルが温度上昇することを簡易な構成で回避することができ、温度センサを設けなくても温度制御可能になるのでシステムの簡素化、制御動作の簡素化を図ることができ、温度センサが不要であるので熱伝達特性のばらつきの影響も受けないので、使用環境にも影響されない。
【図面の簡単な説明】
【0013】
【図1】電動機の駆動制御回路のブロック構成図である。
【図2】電動機の負荷保持停止動作パターンを示すタイムチャート図である。
【図3】電動機の負荷保持状態における電気角ごとのサイクル数を示す表図である。
【図4】他例に係る電動機の負荷保持停止動作パターンを示すタイムチャート図である。
【図5】他例に係る電動機の負荷保持状態における電気角ごとのサイクル数を示す表図である。
【図6】U相コイルの温度上昇試験結果を示すグラフ図である。
【図7】各相コイルの電流波形と電気角との関係を示すグラフ図である。
【図8】比較例に係る電動機の負荷保持停止動作パターンを示すタイムチャート図である。
【図9】比較例に係る電動機の負荷保持状態における電気角ごとのサイクル数を示す表図である。
【図10】特定の負荷保持位置のコイルの温度上昇を示すグラフ図である。
【発明を実施するための形態】
【0014】
以下、本発明に係る電動機駆動制御方法の実施形態について、添付図面を参照しながら説明する。本実施形態では、電動機として車載用の三相DCブラシレスモータを用いた駆動制御方法について例示する。
【0015】
図1のブロック図を参照して、電動機の概略構成について説明する。
電動モータ1は、クラッチペダルの踏み込み力をアシストする動力を発生させる。クラッチペダルの踏み込み動作及び戻り動作に応じて電動モータ1が正逆回転駆動することで、アシスト機構を構成するボールねじを介してクラッチ板どうしを接離動させる回転‐直線運動に変換することによりクラッチの接続・接続解除が行われる。このクラッチペダルを踏み込んで電動モータ1に通電したまま停止状態となる(負荷保持停止状態)ことで、特定相のモータコイル3に最大電流が流れて加熱損傷するおそれがある。
【0016】
ロータ2は、図示しないシャフトにロータマグネットが一体に組み付けられて回転可能に軸支されている。ロータマグネットはシャフトの中途部に一体に組み付けられ、両側を軸受部(ボールベアリング)により回転可能に支持されている。
【0017】
図示しないロータマグネットと対向配置されたステータコアには、三相(U相,V相,W相)のモータコイル3が巻き付けられている。各相モータコイル3は、後述する制御回路により所定のタイミングでモータ電流が流れる。本実施例では、各相モータコイル3はY結線されている。尚、モータコイル3の結線方法はY結線に限定されるものではなく、デルタ結線でも本発明を実施できることは言うまでもない。
【0018】
ロータマグネットの磁極位置を回転センサ(ホールセンサ)4により検出することによりロータ2の回転位置が検出される。また、電動モータ1の回転変位から、車体に対するクラッチ板の絶対変位を検出する位置センサ(レゾルバ)5が設けられている。
【0019】
上記回転センサ4及び位置センサ5は制御ユニット6(車載用ECU)に接続されている。制御ユニット6は、CPU,ROM,RAMなどの各種制御素子を備えた制御回路7により電動モータ1の駆動を制御する。制御回路7は、バッテリーなどの直流電源8より直流電源電圧が供給されて動作する。
回転センサ4で検出された検出信号は制御回路7に供給される。制御回路7は、ロータ回転位置に応じて、FETドライバ9を通じてFETブリッジ回路10を通じて各相モータコイル3のうちいずれか2相に電流方向を変えて流すことにより、ロータ2の回転を付勢するように通電制御する。
【0020】
また、レゾルバLSI(大規模集積回路)11は、位置センサ5の検出信号から、駆動停止した電動モータ1の回転角を検出する。このレゾルバLSI11によって検出した回転角位置を基準として、制御回路7はFETドライバ9を通じてFETブリッジ回路10を通じてロータ2の回転位置が所定位置になるように回転制御する。
【0021】
具体的には、三相モータの各相モータコイル3に通電状態でロータ2の回転が負荷保持状態で停止したときに、当該各相モータコイル3に供給される各相電流が、任意の直前停止位置に対して電気角で60°(180/n;nは相数であって、2以上の整数)だけ所定回転方向(正転若しくは逆転方向)に回転させて停止させるように制御する。
【0022】
これにより特定の負荷保持停止位置からロータ2を所定回転させて、その特定の負荷保持停止位置に戻るまでを1サイクルとして、その1サイクル間の通電範囲内で各停止位置において停止する時間の総和が同一になるように駆動制御する。尚、1サイクルに限らず、複数サイクル間に停止する時間の総和が同一になるように駆動制御するものでも良い。
U,V,Wの各相コイルの発熱量Qは、抵抗値R,電流値I,通電時間tとすると、Q=0.24×I2Rtで与えられる。
【0023】
よって、上述した1サイクル若しくは複数サイクル間の通電範囲内で各停止位置における停止時間tが同一であれば、U,V,Wの各相コイルに流れる電流が順番に最大となり発熱量Qが平均化される。よって、基準位置は不問であり、任意の直前停止位置に対して三相の場合、可変電気角を60°×N(Nは整数であって3の倍数を除く)とすることで、発熱量Qを平均化することができる。
【0024】
尚、可変電気角を60°×3N(Nは整数)では、同相コイルに流れる電流の向きが変わるだけで同じ電流値が流れたまま停止するため特定相のモータコイル3の発熱量Qが増大する。
【0025】
以下、通電動作パターン例について図2乃至図6を参照して説明する。
図2は、三相モータコイル3において、1サイクル回転する間に停止する負荷保持停止位置(1)〜(3)についての停止時間を示すタイミングチャートである。尚、1サイクルとは例えば負荷保持停止位置(1)からロータを所定回転させて、再び負荷保持停止位置(1)に戻るまでをいう。もちろん負荷保持停止位置(2)や(3)をサイクル開始・終了としても良い。
クラッチペダルの踏み込み動作と戻り動作が繰り返し行われるため、踏み込み時を正回転とすると戻り時には逆回転となる。
【0026】
例えば電気角(1)〜(3)はロータ停止位置が電気角で60°ずつ位置ずれした負荷保持停止位置とすると、図2の通電動作パターンは、三相モータの場合は電気角で60°回転するごとに通電パターンが切り替わる6パターンあり、Tを所定の時間単位とすると、1回目の負荷保持停止位置はU相コイルに通電状態で1T停止し、2回目の負荷保持停止位置はV相コイルに通電状態で1T停止し、3回目の負荷保持停止位置はW相コイルに通電状態で1T停止する通電パターンを繰り返す場合を示す。
【0027】
図3は2サイクル間の通電範囲内で、各相の負荷保持停止位置に停止した回数を示す表図である。各相の負荷保持停止位置に停止した回数は2回と等しく、各相コイルの発熱量も均一化することができる。
【0028】
図4は、他例に係る三相モータコイル3において、1サイクル間に停止する負荷保持停止位置(1)〜(3)についての停止時間を示すタイミングチャートである。
クラッチペダルの踏み込み動作と戻り動作が繰り返し行われるため、踏み込み時を正回転とすると戻り時には逆回転となるのは同様である。
【0029】
例えば電気角(1)〜(3)をロータ停止位置が電気角で60°ずつ位置ずれした負荷保持停止位置とすると、図4の通電動作パターンは、1回目の負荷保持停止位置はU相コイルに通電状態で2T停止し、2回目の負荷保持停止位置はV相コイルに通電状態で1T停止し、3回目の負荷保持停止位置はW相コイルに通電状態で1T停止し、4回目の負荷保持停止位置はV相コイルに通電状態で1T停止し、5回目の負荷保持停止位置はW相コイルに通電状態で1T停止するパターンを繰り返す場合を示す。
【0030】
図5は電気角で1サイクル間の通電範囲内で、各相の負荷保持停止位置に停止した回数を示す表図である。各相の負荷保持停止位置に停止した回数は2回と等しく、各相コイルの発熱量も均一化することができる。
車両運転手らの操作(クラッチペダルの踏み込み動作・戻り動作など)により、必ずしも電気角(1)〜(3)に対応する負荷保持停止位置に同じ時間停止(電流を通電)するとは限らないが、この実施例のように電気角(1)の通電時間が長いならば、電気角(1)に対応する負荷保持停止位置を一度通過するようにして、他の電気角の停止回数(停止時間)を増やすよう制御し、結果として1サイクル中での各相の負荷保持停止位置に停止した回数は2回と等しくして、各相コイルの発熱量も均一化することができる。
また、車両運転手らの操作の回数が増すほど、電気角(1)〜(3)に対応する負荷保持停止位置に停止する回数が増えることから、確率的に各相コイルの発熱量は均一化されることになる。
【0031】
図6はU相コイルの温度上昇試験を行なった結果を示すグラフ図である。
左半図は電気角(3)から(1)に対応する負荷保持停止位置を維持した場合のU相コイルの温度上昇の経時変化を示す。なお、各負荷保持停止位置を維持して、温度上昇がある程度収まってから次の負荷保持停止位置に回転させて停止するようにしている。時間経過とともに、U相コイルの温度上昇が増大することが分かる。これに対して、右半図の本願発明のように基準位置を決めないで直前停止位置から所定時間で順次所定量だけ回転させた負荷保持停止位置において可変停止する場合には、負荷保持停止位置が変わることで各相コイルにおけるトータルの通電時間が均一になるため、U相の温度上昇が抑えられることが分かる。尚、ここでは実験のため、車両運転手らの操作動作ではなくプログラム的に一定時間で負荷保持停止位置を回転させている。
【0032】
これまで説明してきた電気角(1)〜(3)は任意の電気角であり、それぞれが(180/n)°(nは相数であって、2以上の整数)ずつ回転していればどこで停止させてもよいが、図7のように電気角(1)´〜(3)´でも良い。
図7は三相コイルにおいて最大電流となる電気角を示す波形図である。U相の電気角(1)´を0°とすると、V相の電気角(2)´は電気角で120°回転した位置、W相の電気角(3)´は電気角で60°回転した位置となる。この電気角(1)´〜(3)´に対応する負荷保持停止位置を用いて図2〜図5において説明した制御を行っても良い。
【0033】
一方、図8乃至図10は、本願発明の対比例を示すもので、特定相のコイルに負荷保持停止状態を決めたときの各相コイルの経時的な温度変化を説明する対比図である。
図8はU相コイルを負荷保持停止位置に決めた場合の、6サイクル間に負荷保持停止位置(1)における停止時間を示すタイミングチャートである。
図8の通電動作パターンは、1回目の負荷保持停止位置はU相コイルに通電状態で1T停止し、その後ロータ回転位置に応じてV相コイル乃至W相コイルに通電している時でもU相コイルへ通電する負荷保持停止位置(1)まで回転して停止するため以降はこのパターンを繰り返すことになる。
【0034】
図9は6サイクル間の通電範囲内で、U相の負荷保持停止位置に停止した回数を示す表図である。通電パターンが異なる1〜6のサイクルにおいていずれもU相の負荷保持停止位置(1)に停止するため、停止回数は6回となる。
【0035】
このため、負荷保持停止位置(1)がU相コイルのみに偏っているため、図10に示す各相コイルの発熱量は、U相コイルの温度上昇が他相コイルよりも増大してしまう。
【0036】
上述した負荷保持停止位置における各相コイルへの通電時間や通電パターンは任意であり、変更することが可能である。
また、本実施例では三相モータについて説明したが、二相モータ、四相モータ等であっても良い。
また、電動モータは、インナーロータ型のDCブラシレスモータであってもアウターロータ型のDCブラシレスモータであってもいずれでもよい。
【符号の説明】
【0037】
1 電動モータ
2 ロータ
3 モータコイル
4 回転センサ
5 位置センサ
6 制御ユニット
7 制御回路
8 直流電源
9 FETドライバ
10 FETブリッジ回路
11 レゾルバLSI
【特許請求の範囲】
【請求項1】
多相モータをアシスト機構の駆動源として用いる電動機の駆動制御方法であって、
前記多相モータとそのモータ駆動回路を含む制御回路を具備し、前記制御回路はモータコイルに通電状態で、かつロータが負荷保持状態で回転停止させたロータの回転停止位置である負荷保持停止位置を、前回ロータが回転停止した負荷保持停止位置に対して電気角で((180/n)°;nは相数であり、2以上の整数)だけ所定回転方向にロータを回転させた位置で停止させることを特徴とする電動機の駆動制御方法。
【請求項2】
特定の負荷保持停止位置からロータを所定回転させて前記特定の負荷保持停止位置に戻るまでを1サイクルとして、そのサイクルを1回若しくは複数回繰り返す間の、各相コイルへの通電時間の総和が同一になるよう駆動制御する請求項1記載の電動機の駆動制御方法。
【請求項3】
前記負荷保持停止位置は、いずれかの相が最大電流となる電気角に対応するロータ回転停止位置であることを特徴とする請求項1又は2記載の電動機の駆動制御方法。
【請求項4】
前記制御回路は、位置センサによって検出したモータの直前停止位置を基準として、回転センサにより検出したロータ位置に応じてモータ駆動回路を通じて通電制御することで、直前停止位置に対してモータを所定角度回転させて停止するように制御する請求項1乃至3のいずれか1項記載の電動機の駆動制御方法。
【請求項1】
多相モータをアシスト機構の駆動源として用いる電動機の駆動制御方法であって、
前記多相モータとそのモータ駆動回路を含む制御回路を具備し、前記制御回路はモータコイルに通電状態で、かつロータが負荷保持状態で回転停止させたロータの回転停止位置である負荷保持停止位置を、前回ロータが回転停止した負荷保持停止位置に対して電気角で((180/n)°;nは相数であり、2以上の整数)だけ所定回転方向にロータを回転させた位置で停止させることを特徴とする電動機の駆動制御方法。
【請求項2】
特定の負荷保持停止位置からロータを所定回転させて前記特定の負荷保持停止位置に戻るまでを1サイクルとして、そのサイクルを1回若しくは複数回繰り返す間の、各相コイルへの通電時間の総和が同一になるよう駆動制御する請求項1記載の電動機の駆動制御方法。
【請求項3】
前記負荷保持停止位置は、いずれかの相が最大電流となる電気角に対応するロータ回転停止位置であることを特徴とする請求項1又は2記載の電動機の駆動制御方法。
【請求項4】
前記制御回路は、位置センサによって検出したモータの直前停止位置を基準として、回転センサにより検出したロータ位置に応じてモータ駆動回路を通じて通電制御することで、直前停止位置に対してモータを所定角度回転させて停止するように制御する請求項1乃至3のいずれか1項記載の電動機の駆動制御方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】

【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2012−10557(P2012−10557A)
【公開日】平成24年1月12日(2012.1.12)
【国際特許分類】
【出願番号】特願2010−146543(P2010−146543)
【出願日】平成22年6月28日(2010.6.28)
【出願人】(000106944)シナノケンシ株式会社 (316)
【Fターム(参考)】
【公開日】平成24年1月12日(2012.1.12)
【国際特許分類】
【出願日】平成22年6月28日(2010.6.28)
【出願人】(000106944)シナノケンシ株式会社 (316)
【Fターム(参考)】
[ Back to top ]