
電動機の駆動方法および駆動装置
【課題】電動機の損失を最小化することができる電動機の駆動方法および駆動装置を提供する。
【解決手段】第1時刻から所定時間経過した第2時刻において目標回転速度ω*となるように電動機を駆動させる電動機の駆動方法であって、目標回転速度ω*を設定する目標設定ステップ(S1)と、電動機の入出力特性から得られたマップにおいて、第1時刻の動作点と、第2時刻の動作点と、第1時刻と第2時刻の間の時刻における複数の動作点とで構成された初期軌道L1を決定する初期軌道決定ステップ(S2、S3)と、初期軌道L1を構成する全動作点における損失の和が最小(または効率の和が最大)となるように、マップに基づいて最適化を行って目標軌道L2を導出する目標軌道導出ステップ(S4〜S7)と、目標軌道L2に従ってトルクおよび回転速度を制御する制御ステップと、を含むことを特徴とする。
【解決手段】第1時刻から所定時間経過した第2時刻において目標回転速度ω*となるように電動機を駆動させる電動機の駆動方法であって、目標回転速度ω*を設定する目標設定ステップ(S1)と、電動機の入出力特性から得られたマップにおいて、第1時刻の動作点と、第2時刻の動作点と、第1時刻と第2時刻の間の時刻における複数の動作点とで構成された初期軌道L1を決定する初期軌道決定ステップ(S2、S3)と、初期軌道L1を構成する全動作点における損失の和が最小(または効率の和が最大)となるように、マップに基づいて最適化を行って目標軌道L2を導出する目標軌道導出ステップ(S4〜S7)と、目標軌道L2に従ってトルクおよび回転速度を制御する制御ステップと、を含むことを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電動機の駆動方法および駆動装置に関し、特に、定められた時刻に目標回転速度となることが要求される電動機の駆動方法および駆動装置に関する。
【背景技術】
【0002】
一般に、電動機を備えた搬送車やリフトでは、積荷に対する影響から急峻な速度応答性は必要とされず、定められた時刻に目標回転速度となることが要求される。かかる用途に用いられる電動機を駆動する場合、その時刻に至るまでの回転速度や電動機が発生するトルクの変化のさせ方によって、電動機の損失が変化することが知られている。このため、電動機の損失が最小となるような電動機の駆動方法および駆動装置が必要とされる。
【0003】
従来の電動機(特に、誘導電動機)の駆動方法として、回生時における電動機の損失が最小となるように、すなわち回生電力量が最大となるように、変分法により導出した最適トルクで電動機を駆動させる駆動方法が知られている(例えば、非特許文献1参照)。この従来の駆動方法では、最適トルクを導出するために、まず、ベクトル制御された電動機の内部損失等を求めて回生電力を定式化するステップが実行される。
【0004】
このステップでは、電動機の回転子の運動方程式を、慣性モーメントJ、減衰係数ξ、回転角速度ω、トルクTを用いて次式で表わす。
【数1】

ただし、トルクTは力行時を正、回生時を負とする。回転角速度ωは正の場合のみとし、回生時に逆回転することはないものとする。
また、ベクトル制御された電動機の内部損失Plossを、一次(固定子)銅損と二次(回転子)銅損との和によって、次式のように定義する。
【数2】
なお、a、bは、相互インダクタンス、二次巻線インダクタンス、一次抵抗、二次抵抗、極対数、二次磁束のγ軸成分等によって算出される定数である。
【0005】
電動機が発電機として働く場合、回転角速度ω>0に対してトルクT<0となるので、発電される電力Wgは、次式で与えられる。
【数3】
【0006】
回生電力Wrgは、発電される電力Wgから内部損失Plossを減じたものであるので、上記(2)式および上記(3)式により、次式で与えられる。
【数4】
さらに、上記(1)式を用いることで、回生電力Wrgは、
【数5】
となる。
【0007】
続いて、従来の駆動方法では、上記(5)式を用いて最適トルクを導出するステップが実行される。
【0008】
ここで、制約条件として、第1時刻t0から第2時刻tn(>t0)において回転角速度ωをω0からωnまで減速させるものとする。そして、第1時刻t0から第2時刻tnまで回生させたときの回生電力量Irgを、次式のように定義する。
【数6】
従来の駆動方法の目的は、回生電力量Irgが最大となるようなトルクT(最適トルク)を導出することにあるので、上記(6)式から回生電力量Irgが最大となる回転角速度ωの時間波形を導出する。
回転角速度ωの時間波形を導出する方法として、最適化手法の一つである変分法が用いられる。そして、変分法により得られた回転角速度ωの時間波形および上記(1)式から、回生電力量Irgが最大となる最適トルクを導出する。
なお、加速(力行)時の場合も同様に、変分法を用いて力行電力量が最小となる最適トルクを導出することができる。
【0009】
従来の駆動方法によれば、上記のようにして導出された最適トルクに従って電動機を制御することで、電動機の損失を低減させることができる。
【先行技術文献】
【非特許文献】
【0010】
【非特許文献1】井上馨、小方健司、加藤利次、「変分法による最適トルクを用いた誘導電動機の高効率電力回生・駆動法」、電気学会論文誌D、2008年、128巻9号、p.1098−1105
【発明の概要】
【発明が解決しようとする課題】
【0011】
しかしながら、従来の駆動方法では、上記(2)式から分かるように、電動機の損失を一次銅損と二次銅損の和によって定義しているので、上記(2)式に含まれていない損失(例えば、ヒステリシス損等の鉄損)については何ら考慮されていない。このため、従来の駆動方法では、導出した最適トルクに従って電動機を制御しても、電動機の損失を最小化することができない場合があった。
【0012】
本発明は上記事情に鑑みてなされたものであって、その課題とするところは、電動機の損失を最小化することができる電動機の駆動方法および駆動装置を提供することにある。
【課題を解決するための手段】
【0013】
上記課題を解決するために、本発明に係る電動機の駆動方法は、電動機の回転速度を変化させ、第1時刻から所定時間経過した第2時刻において目標回転速度となるように電動機を駆動させる電動機の駆動方法であって、
目標回転速度を設定する目標設定ステップと、
電動機の入出力特性から得られた該電動機の回転速度と、トルクと、損失または効率との相互関係により規定されたマップにおいて、第1時刻の動作点と第2時刻の動作点とを設定するとともに、第1時刻の動作点と、第2時刻の動作点と、第1時刻と第2時刻の間の時刻における複数の動作点とで構成された初期軌道を決定する初期軌道決定ステップと、
初期軌道を構成する全動作点における損失の和が最小となるように、または初期軌道を構成する全動作点における効率の和が最大となるように、マップに基づいて初期軌道を構成する動作点を修正する最適化を行って目標軌道を導出する目標軌道導出ステップと、
目標軌道に従って電動機のトルクおよび回転速度を制御する制御ステップと、を含むことを特徴とする。
【0014】
この構成によれば、電動機の入出力特性から得られた該電動機の回転速度と、トルクと、損失または効率との相互関係により規定されたマップに基づいて、トルクおよび回転速度の変化のさせ方に相当する目標軌道を導出しているので、電動機に存在するすべての損失が考慮された最適なトルクおよび回転速度を導出することができる。したがって、この構成によれば、電動機の損失を最小化(効率を最大化)することができる。
【0015】
また、上記駆動方法では、目標軌道導出ステップにおいて、初期軌道を構成する動作点のうち、第1時刻の動作点以外のすべての動作点について最適化を行ってもよい。
【0016】
さらに、上記目標軌道導出ステップは、損失の和または効率の和を、電動機の回転速度およびトルクを変数とした評価関数で表し、該評価関数の値をマップに基づいて最適化することにより、初期軌道の最適化を行うことが好ましい。
【0017】
また、上記課題を解決するために、本発明に係る駆動装置は、電動機の回転速度を変化させ、第1時刻から所定時間経過した第2時刻において目標回転速度となるように電動機を駆動させる駆動装置であって、
目標回転速度を設定する目標設定部と、
電動機の入出力特性から得られた該電動機の回転速度と、トルクと、損失または効率との相互関係により規定された複数の動作点を含むマップが格納された記憶部と、
記憶部に格納されているマップにおいて、第1時刻の動作点と第2時刻の動作点とを設定するとともに、第1時刻の動作点と、第2時刻の動作点と、第1時刻と第2時刻の間の時刻における複数の動作点とで構成された初期軌道を決定する初期軌道決定部と、
初期軌道を構成する全動作点における損失の和が最小となるように、または初期軌道を構成する全動作点における効率の和が最大となるように、マップに基づいて初期軌道を構成する動作点を修正する最適化を行って目標軌道を導出する目標軌道導出部と、
目標軌道に従って電動機のトルクおよび回転速度を制御する制御部と、を備えたことを特徴とする。
【0018】
この構成によれば、電動機の入出力特性から得られた該電動機の回転速度と、トルクと、損失または効率との相互関係により規定されたマップに基づいて、トルクおよび回転速度の変化のさせ方に相当する目標軌道を導出するので、電動機に存在するすべての損失が考慮された最適なトルクおよび回転速度を導出することができ、電動機の損失を最小化(効率を最大化)することができる。
【発明の効果】
【0019】
本発明によれば、電動機の損失を最小化することができる電動機の駆動方法および駆動装置を提供することができる。
【図面の簡単な説明】
【0020】
【図1】本発明に係る駆動装置を備えた電動機駆動システムのブロック図である。
【図2】電動機の回転角速度、トルクおよび損失により規定されたマップの一例である。
【図3】電動機の回転角速度、トルクおよび効率により規定されたマップの一例である。
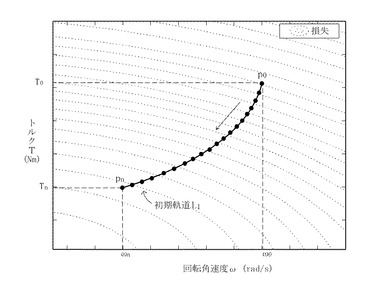
【図4】初期軌道が決定されたマップの一例である。
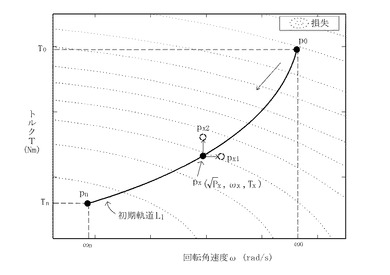
【図5】初期軌道の最適化を説明するため図である。
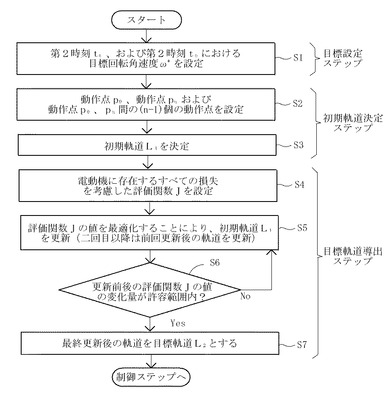
【図6】本発明に係る電動機の駆動方法のフローチャートである。
【発明を実施するための形態】
【0021】
以下、添付図面を参照して、本発明に係る電動機の駆動方法および駆動装置の好ましい実施形態について説明する。
なお、以下では、電動機の一例として三相交流電圧で駆動される誘導電動機を用いて説明しているが、これに限らず、直流電動機や単相電動機等の電動機を用いてもよい。
【0022】
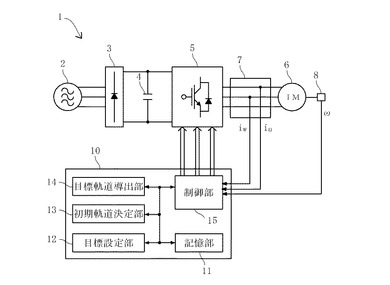
[駆動装置]
図1に、本発明の一実施形態に係る駆動装置10を備えた電動機駆動システム1のブロック図を示す。同図に示すように、電動機駆動システム1は、駆動装置10の他に、三相交流電源2から供給される三相交流電圧を整流・平滑して直流電圧を出力する整流部3および平滑コンデンサ4と、整流・平滑された直流電圧を駆動装置10の制御下で可変電圧かつ可変周波数の三相交流電圧に変換するインバータ部5と、インバータ部5から出力された三相交流電圧で駆動される電動機(誘導電動機)6と、電動機6の各相に流れる三相交流電流iU、iWを検出する電流センサ7と、電動機6の回転角速度ω(本発明の「回転速度」に相当)を検出するエンコーダ8とを備えている。
電流センサ7で検出された三相交流電流iU、iW、およびエンコーダ8で検出された回転角速度ωは、駆動装置10にフィードバックされる。
【0023】
駆動装置10は、後述するマップ(NTマップ)が格納されている記憶部11と、電動機6の目標回転角速度ω*(本発明の「目標回転速度」に相当)等を設定する目標設定部12と、回転角速度ωおよびトルクTの変化のさせ方を仮決めした初期軌道を決定する初期軌道決定部13と、初期軌道を最適化して目標軌道を導出する目標軌道導出部14と、目標軌道に従ってトルクTおよび回転角速度ωを制御する制御部15とを備えている。
【0024】
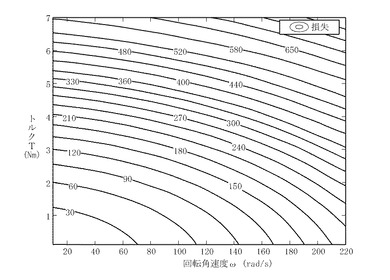
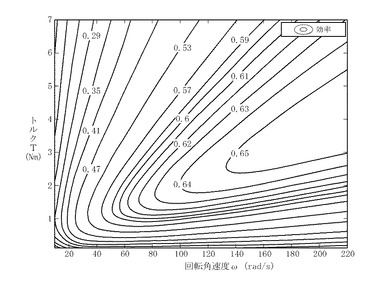
記憶部11には、電動機6の回転角速度ω、トルクT、損失または効率の相互関係により規定された二次元のマップ(図2、図3参照)が格納されている。
これらのマップは、駆動装置10により電動機6を駆動させる前に、電動機6の入出力特性に基づいて作成されたものであり、電動機6に存在するすべての損失を含んでいる。具体的には、損失および効率は、電動機6に対する入力電力と出力電力の実測値に基づいて算出され、そのときの回転角速度ωおよびトルクTは、エンコーダ8およびトルクセンサにより検出される。上記損失の算出等は、電動機6に接続した負荷の大きさを変えながら行われる。これにより、電動機6の仕事量を任意に変更させることができるので、電動機6の任意の測定点における回転角速度ω、トルクT、損失および効率を得ることができる。
このようにして得られた複数の測定点のうち、損失が同じになる測定点同士を結んだものが図2に示すマップであり、効率が同じになる測定点同士を結んだものが図3に示すマップである。
【0025】
目標設定部12は、加速または減速開始時の第1時刻t0から所定時間経過した加速または減速終了時の第2時刻tnと、第2時刻tnにおける電動機6の目標回転角速度ω*とを外部からの指令信号に基づいて設定する。
また、目標設定部12は、アクセル操作等により加速または減速中に指令信号を受信した場合、受信時を第1時刻t0として、新たに第2時刻tnおよび第2時刻tnにおける目標回転角速度ω*を設定する。
【0026】
初期軌道決定部13は、記憶部11に格納されているマップにおいて、第1時刻t0における動作点p0と、第2時刻tnにおける動作点pnと、第1時刻t0と第2時刻tnの間の時刻における複数(n−1個)の動作点とを設定する。これにより、動作点p0、動作点pn、および動作点p0と動作点pnの間の動作点で構成された初期軌道L1が決定される(図4参照)。
具体的には、まず、目標設定部12が指令信号を受信した後にエンコーダ8により検出された回転角速度ω0と、電流センサ7で検出された三相交流電流iU、iWから算出したトルクT0とに基づいて第1時刻t0における動作点p0がマップ上に設定される。
続いて、目標回転角速度ω*等に応じて仮決めした第2時刻tnにおける回転角速度ωnと、トルクT0から一定の割合で変化させる等して仮決めした第2時刻tnにおけるトルクTnとに基づいて第2時刻tnにおける動作点pnがマップ上に設定される。
そして、第1時刻t0と第2時刻tnの間で時間的にn等分されたn−1個の動作点がマップ上に設定され、初期軌道L1が決定される。
この初期軌道L1は、回転角速度ωおよびトルクTの変化のさせ方を仮決めしたものであり、該初期軌道L1を構成する全動作点p0〜pnにおける損失(または効率)の和が、第1時刻t0から第2時刻tnにおいて回転角速度ωをω0からωnまで変化させた際に発生する電動機6の損失(または効率)となる。
【0027】
目標軌道導出部14は、初期軌道L1を構成する全動作点p0〜pnにおける損失の和が最小(または効率の和が最大)となるように、全動作点p0〜pnのうち動作点p0以外のn個の動作点について最適化を行って目標軌道L2を導出する。
具体的には、目標軌道導出部14は、マップに基づいて損失の和が小さく(または効率の和が大きく)なるように、動作点毎に回転角速度ωおよびトルクTを微小変化させ、初期軌道L1を構成する動作点を修正して初期軌道L1を更新する。そして、更新後の軌道と更新直前の軌道との損失(または効率)の和の変化量が、求められる精度と計算時間との兼ね合いにより定められた許容範囲内に収まるまで更新を繰り返し、最終的に得られた軌道を目標軌道L2とする。なお、目標軌道L2では、ωn=ω*となる。
【0028】
制御部15は、目標軌道L2に従って回転角速度ωをω0からωn(=ω*)まで変化させるために、インバータ部5を制御して、電動機6のトルクTおよび回転角速度ωを制御する。
具体的には、制御部15は、エンコーダ8で検出された回転角速度ωと、電流センサ7で検出された三相交流電流iU、iWから算出したトルクTとが目標軌道L2に従って変化するように、インバータ部5を制御する。なお、トルクTは、電流センサ7で検出された三相交流電流iU、iWから算出する替わりに、トルクセンサを設け、該トルクセンサにより検出してもよい。
【0029】
上記のように、本実施形態に係る駆動装置10によれば、電動機6の入出力特性から得られた該電動機6の回転角速度ωと、トルクTと、損失または効率との相互関係により規定されたマップに基づいて、トルクTおよび回転角速度ωの変化のさせ方に相当する目標軌道L2が導出されるので、電動機6に存在するすべての損失が考慮された最適なトルクTおよび回転角速度ωを導出することができ、電動機6の損失を最小化(効率を最大化)することができる。
【0030】
[駆動方法]
次に、本実施形態に係る電動機の駆動方法について具体的に説明する。
なお、以下の説明では、減速開始時の第1時刻t0から所定時間経過した減速終了時の第2時刻tnまでに、回転角速度ωをω0からωn(=ω*)まで減速させることとする(以下の計算式では、ωi=ω[i](ただし、i=0、1、・・・、n)とする)。
また、記憶部11には図2に示すように回転角速度ω、トルクTおよび損失の相互関係により規定されたマップが予め格納されていることとする。
【0031】
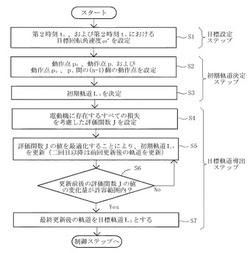
本実施形態に係る駆動方法は、図6に示すように、目標設定ステップ(S1)と、初期軌道決定ステップ(S2、S3)と、目標軌道導出ステップ(S4〜S7)と、制御ステップとに大別できる。
【0032】
まず、目標設定ステップでは、目標設定部12により第2時刻tnと、第2時刻tnにおける目標回転角速度ω*とが外部からの指令信号に基づいて設定される(S1)。
【0033】
続いて、初期軌道決定ステップでは、初期軌道決定部13により、第1時刻t0における動作点p0と、第2時刻tnにおける動作点pnと、第1時刻t0と第2時刻tnの間の時刻におけるn−1個の動作点とが設定される(S2)。そして、図4に示すように、記憶部11に格納されているマップ上に初期軌道L1が描かれる(S3)。
【0034】
続いて、目標軌道導出ステップでは、目標軌道導出部14により、後述する評価関数Jの値が小さくなるように回転角速度ωおよびトルクTを微小変化させて初期軌道L1を構成する動作点を修正する最適化が行われる。
【0035】
一般に、評価関数Jは、nステップからなるトルクの目標値信号列ベクトルT*↑(文字の後に「↑」の記号を付した場合はベクトル表示であることを表す。以下同様。)
【数7】
と回転角速度の目標値信号列ベクトルy*↑
【数8】
を用いて次式で定義することができる。
なお、目標値信号列ベクトルT*↑は、最適化して求める各動作点における最適トルクを表しており、目標値信号列ベクトルy*↑は、最適化して求める動作点p0以外のすべての動作点における最適回転角速度を表している。
【数9】
上記(9)式において、J1は第2時刻tnにおいて目標回転角速度ω[n]*(=ω*)に到達するという制約条件を表したものであり、J2、J3は、それぞれ電動機6の電気的損失、機械的損失を表したものである。また、w1↓、w2↓(文字の後に「↓」の記号を付した場合は行列表示であることを表す。以下同様。)は、ともに重み関数(重み行列)である。
【0036】
本実施形態に係る電動機の駆動方法は、トルクTおよび損失の相互関係により規定されたマップに基づいて算出した電動機6の損失J4(J4については後述する。)を、上記(9)式のJ2およびJ3の代わりに用いて評価関数Jの値が小さくなるように最適化することで、電動機6に存在するすべての損失が考慮された最適なトルクTおよび回転角速度ωを導出しようとするものである。
【0037】
ここで、初期軌道L1を構成する任意の動作点pxにおける損失Pxは、次式で表わすことができる。
【数10】
また、動作点pxにおける回転角速度ωxおよびトルクTxを微小変化させた場合の損失は、次式のように、動作点pxの損失に関する項と、損失を回転角速度ωで偏微分した項と、損失をトルクTで偏微分した項で表わすことができる。
【数11】
さらに、上記(11)式は、回転角速度ωおよびトルクTの関数として次式で表わすことができる。
【数12】
上記(12)式において、回転角速度ωとトルクTに関する微分値は、記憶部11に格納されているマップに含まれている複数の測定点(線形補間等により回転角速度ω、トルクTおよび損失を導出した測定点間の点も含む。)に基づいて算出される。すなわち、上記(12)式の定数項F、G、hは、記憶部11に格納されているマップに含まれている複数の測定点に基づいて導出することができる。
上記(12)式では、図5に示すように、回転角速度ωおよびトルクTが変化する際(例えば、px→px1またはpx2)にどれだけ損失が変化するかの割合を求めている。
【0038】
上記(12)式から、初期軌道L1を構成する全動作点p0〜pnに対する損失Pは、次式で表わすことができる。
【数13】
また、以下に定義するベクトルα↑、行列β↓を用いて、回転角速度の目標値信号列ベクトルy*↑は次式で表わすことができる。
【数14】
上記(14)式において、a、bにおけるΔTSは、第1時刻t0から第2時刻tnを分割したときの各動作点の時間区間を表している。
上記(14)式を用いて、上記(13)式は次式で表わすことができる。
【数15】
したがって、損失Pは次式で表わすことができる。
【数16】
上記(16)式において、w3↓は重み関数(重み行列)である。
【0039】
上記(16)式で定義したJ4を上記(9)式のJ2およびJ3の代わりに用いて、評価関数Jは次式で表わすことができる。
【数17】
【0040】
上記(17)式のように評価関数Jが設定されると(S4)、続いて、該評価関数Jの値が小さくなるように評価関数Jの値の最適化が行われる(S5)。
ステップS5では、初期軌道L1を構成する動作点p0以外のn個の動作点に対して、損失の変化量が最も小さくなる測定点(線形補間等により回転角速度ω、トルクTおよび損失を導出した点も含む。)を導出し、上記(17)式の評価関数Jの値が小さくなるように、いくつかまたは全部の動作点を導出した測定点の位置に移動させる。これにより、動作点p0以外の初期軌道L1を構成するn個の動作点が修正され、初期軌道L1が更新される。
より具体的には、本実施形態に係る電動機の駆動方法では、上記(17)式における評価関数JにSchur Complimentを用いることで、最適化手法の一つであるLMI(線形行列不等式)最適化問題に帰着させ、それを解くことにより最適化を自動的に実行している。
【0041】
初期軌道L1の更新は、更新後の新たな軌道における評価関数Jの値と更新直前の軌道における評価関数Jの値との変化量が、許容範囲内に収まるまで繰り返し実行される(S6)すなわち、ステップS6では、これ以上更新しても、評価関数Jの値が変化しなくなるまで繰り返し実行される。
評価関数Jの値の変化量が許容範囲内に収まると(S6でYes)、そのときの軌道が目標軌道L2となる(S7)。なお、目標軌道L2では、ωn=ω*となる。
【0042】
続いて、制御ステップでは、制御部15により、エンコーダ8で検出された回転角速度ωと、電流センサ7で検出された三相交流電流iU、iWから算出したトルクTが目標軌道L2に従って変化するように、インバータ部5が制御される。これにより、電動機6の回転角速度ωが目標軌道L2に従ってω0からω*まで減速される。
【0043】
上記のように、本実施形態に係る電動機の駆動方法によれば、電動機6の入出力特性から得られた該電動機6の回転角速度ωと、トルクTと、損失との相互関係により規定されたマップに基づいて、評価関数Jの値が最小となるような目標軌道L2が導出されるので、電動機6に存在するすべての損失が考慮された最適なトルクTおよび回転角速度ωが導出される。したがって、本実施形態に係る電動機の駆動方法によれば、目標軌道L2に従ってトルクTおよび回転角速度ωを制御することで電動機6の損失を最小化することができる。
【0044】
以上、本発明に係る電動機の駆動方法および駆動装置の好ましい実施形態について説明したが、本発明は上記実施形態の構成に限定されるものではない。
【0045】
例えば、上記実施形態に係る駆動方法では、評価関数Jの値を最小化するための最適化手法としてLMIを用いているが、これに限らず任意の最適化手法を用いることができる。
【0046】
また、上記実施形態に係る駆動方法では、評価関数Jの値の変化量が許容範囲内に収まったときの軌道を目標軌道L2としているが、評価関数Jの値の変化量が大きくなった場合には、更新直前の軌道を目標軌道L2としてもよい。
【0047】
さらに、上記実施形態に係る駆動方法では、損失を表す評価関数Jを設定し、該電動機6の回転角速度ω、トルクTおよび損失の相互関係により規定されたマップ(図2参照)に基づいて評価関数Jの値を最適化しているが、効率を表す評価関数を設定し、回転角速度ω、トルクTおよび効率の相互関係により規定されたマップ(図3参照)に基づいて効率を表す評価関数の値を最適化してもよい。効率を表す評価関数の場合、該評価関数の値が最大となるように最適化を行うことで、目標軌道L2を導出することができる。
【0048】
また、上記実施形態に係る駆動方法および駆動装置では、回転角速度ω、トルクT、損失または効率の相互関係により規定されたマップに基づいて、最適な回転角速度ωを導出しているが、回転角速度ωを回転速度や回転数で表わしたマップに基づいて、最適な回転速度や回転数を導出してもよい。なお、回転速度や回転数も本発明の「回転速度」に含まれる。
【0049】
さらに、上記実施形態に係る駆動方法および駆動装置では、第1時刻t0と第2時刻tnの間で時間的にn等分されたn−1個の動作点がマップ上に設定し、初期軌道L1を決定しているが、マップ上で動作点間の距離が離れているところは、線形補間等により導出した点を動作点として追加して初期軌道L1を決定してもよい。
【0050】
さらに、上記実施形態に係る駆動方法および駆動装置では、電動機6として三相交流電圧で駆動される誘導電動機6を用いているため三相交流電源2およびインバータ部5が必要になるが、電動機6として直流電動機や単相電動機を用いる場合は、三相交流電源2およびインバータ部5に替えて所望の直流電圧や単相交流電圧を生成する電源部が必要になる。
【符号の説明】
【0051】
1 電動機駆動システム
2 三相交流電源
3 整流部
4 平滑コンデンサ
5 インバータ部
6 電動機
7 電流センサ
8 トルクセンサ
9 エンコーダ
10 駆動装置
11 記憶部
12 目標設定部
13 初期軌道決定部
14 目標軌道導出部
15 制御部
【技術分野】
【0001】
本発明は、電動機の駆動方法および駆動装置に関し、特に、定められた時刻に目標回転速度となることが要求される電動機の駆動方法および駆動装置に関する。
【背景技術】
【0002】
一般に、電動機を備えた搬送車やリフトでは、積荷に対する影響から急峻な速度応答性は必要とされず、定められた時刻に目標回転速度となることが要求される。かかる用途に用いられる電動機を駆動する場合、その時刻に至るまでの回転速度や電動機が発生するトルクの変化のさせ方によって、電動機の損失が変化することが知られている。このため、電動機の損失が最小となるような電動機の駆動方法および駆動装置が必要とされる。
【0003】
従来の電動機(特に、誘導電動機)の駆動方法として、回生時における電動機の損失が最小となるように、すなわち回生電力量が最大となるように、変分法により導出した最適トルクで電動機を駆動させる駆動方法が知られている(例えば、非特許文献1参照)。この従来の駆動方法では、最適トルクを導出するために、まず、ベクトル制御された電動機の内部損失等を求めて回生電力を定式化するステップが実行される。
【0004】
このステップでは、電動機の回転子の運動方程式を、慣性モーメントJ、減衰係数ξ、回転角速度ω、トルクTを用いて次式で表わす。
【数1】
ただし、トルクTは力行時を正、回生時を負とする。回転角速度ωは正の場合のみとし、回生時に逆回転することはないものとする。
また、ベクトル制御された電動機の内部損失Plossを、一次(固定子)銅損と二次(回転子)銅損との和によって、次式のように定義する。
【数2】
なお、a、bは、相互インダクタンス、二次巻線インダクタンス、一次抵抗、二次抵抗、極対数、二次磁束のγ軸成分等によって算出される定数である。
【0005】
電動機が発電機として働く場合、回転角速度ω>0に対してトルクT<0となるので、発電される電力Wgは、次式で与えられる。
【数3】
【0006】
回生電力Wrgは、発電される電力Wgから内部損失Plossを減じたものであるので、上記(2)式および上記(3)式により、次式で与えられる。
【数4】
さらに、上記(1)式を用いることで、回生電力Wrgは、
【数5】
となる。
【0007】
続いて、従来の駆動方法では、上記(5)式を用いて最適トルクを導出するステップが実行される。
【0008】
ここで、制約条件として、第1時刻t0から第2時刻tn(>t0)において回転角速度ωをω0からωnまで減速させるものとする。そして、第1時刻t0から第2時刻tnまで回生させたときの回生電力量Irgを、次式のように定義する。
【数6】
従来の駆動方法の目的は、回生電力量Irgが最大となるようなトルクT(最適トルク)を導出することにあるので、上記(6)式から回生電力量Irgが最大となる回転角速度ωの時間波形を導出する。
回転角速度ωの時間波形を導出する方法として、最適化手法の一つである変分法が用いられる。そして、変分法により得られた回転角速度ωの時間波形および上記(1)式から、回生電力量Irgが最大となる最適トルクを導出する。
なお、加速(力行)時の場合も同様に、変分法を用いて力行電力量が最小となる最適トルクを導出することができる。
【0009】
従来の駆動方法によれば、上記のようにして導出された最適トルクに従って電動機を制御することで、電動機の損失を低減させることができる。
【先行技術文献】
【非特許文献】
【0010】
【非特許文献1】井上馨、小方健司、加藤利次、「変分法による最適トルクを用いた誘導電動機の高効率電力回生・駆動法」、電気学会論文誌D、2008年、128巻9号、p.1098−1105
【発明の概要】
【発明が解決しようとする課題】
【0011】
しかしながら、従来の駆動方法では、上記(2)式から分かるように、電動機の損失を一次銅損と二次銅損の和によって定義しているので、上記(2)式に含まれていない損失(例えば、ヒステリシス損等の鉄損)については何ら考慮されていない。このため、従来の駆動方法では、導出した最適トルクに従って電動機を制御しても、電動機の損失を最小化することができない場合があった。
【0012】
本発明は上記事情に鑑みてなされたものであって、その課題とするところは、電動機の損失を最小化することができる電動機の駆動方法および駆動装置を提供することにある。
【課題を解決するための手段】
【0013】
上記課題を解決するために、本発明に係る電動機の駆動方法は、電動機の回転速度を変化させ、第1時刻から所定時間経過した第2時刻において目標回転速度となるように電動機を駆動させる電動機の駆動方法であって、
目標回転速度を設定する目標設定ステップと、
電動機の入出力特性から得られた該電動機の回転速度と、トルクと、損失または効率との相互関係により規定されたマップにおいて、第1時刻の動作点と第2時刻の動作点とを設定するとともに、第1時刻の動作点と、第2時刻の動作点と、第1時刻と第2時刻の間の時刻における複数の動作点とで構成された初期軌道を決定する初期軌道決定ステップと、
初期軌道を構成する全動作点における損失の和が最小となるように、または初期軌道を構成する全動作点における効率の和が最大となるように、マップに基づいて初期軌道を構成する動作点を修正する最適化を行って目標軌道を導出する目標軌道導出ステップと、
目標軌道に従って電動機のトルクおよび回転速度を制御する制御ステップと、を含むことを特徴とする。
【0014】
この構成によれば、電動機の入出力特性から得られた該電動機の回転速度と、トルクと、損失または効率との相互関係により規定されたマップに基づいて、トルクおよび回転速度の変化のさせ方に相当する目標軌道を導出しているので、電動機に存在するすべての損失が考慮された最適なトルクおよび回転速度を導出することができる。したがって、この構成によれば、電動機の損失を最小化(効率を最大化)することができる。
【0015】
また、上記駆動方法では、目標軌道導出ステップにおいて、初期軌道を構成する動作点のうち、第1時刻の動作点以外のすべての動作点について最適化を行ってもよい。
【0016】
さらに、上記目標軌道導出ステップは、損失の和または効率の和を、電動機の回転速度およびトルクを変数とした評価関数で表し、該評価関数の値をマップに基づいて最適化することにより、初期軌道の最適化を行うことが好ましい。
【0017】
また、上記課題を解決するために、本発明に係る駆動装置は、電動機の回転速度を変化させ、第1時刻から所定時間経過した第2時刻において目標回転速度となるように電動機を駆動させる駆動装置であって、
目標回転速度を設定する目標設定部と、
電動機の入出力特性から得られた該電動機の回転速度と、トルクと、損失または効率との相互関係により規定された複数の動作点を含むマップが格納された記憶部と、
記憶部に格納されているマップにおいて、第1時刻の動作点と第2時刻の動作点とを設定するとともに、第1時刻の動作点と、第2時刻の動作点と、第1時刻と第2時刻の間の時刻における複数の動作点とで構成された初期軌道を決定する初期軌道決定部と、
初期軌道を構成する全動作点における損失の和が最小となるように、または初期軌道を構成する全動作点における効率の和が最大となるように、マップに基づいて初期軌道を構成する動作点を修正する最適化を行って目標軌道を導出する目標軌道導出部と、
目標軌道に従って電動機のトルクおよび回転速度を制御する制御部と、を備えたことを特徴とする。
【0018】
この構成によれば、電動機の入出力特性から得られた該電動機の回転速度と、トルクと、損失または効率との相互関係により規定されたマップに基づいて、トルクおよび回転速度の変化のさせ方に相当する目標軌道を導出するので、電動機に存在するすべての損失が考慮された最適なトルクおよび回転速度を導出することができ、電動機の損失を最小化(効率を最大化)することができる。
【発明の効果】
【0019】
本発明によれば、電動機の損失を最小化することができる電動機の駆動方法および駆動装置を提供することができる。
【図面の簡単な説明】
【0020】
【図1】本発明に係る駆動装置を備えた電動機駆動システムのブロック図である。
【図2】電動機の回転角速度、トルクおよび損失により規定されたマップの一例である。
【図3】電動機の回転角速度、トルクおよび効率により規定されたマップの一例である。
【図4】初期軌道が決定されたマップの一例である。
【図5】初期軌道の最適化を説明するため図である。
【図6】本発明に係る電動機の駆動方法のフローチャートである。
【発明を実施するための形態】
【0021】
以下、添付図面を参照して、本発明に係る電動機の駆動方法および駆動装置の好ましい実施形態について説明する。
なお、以下では、電動機の一例として三相交流電圧で駆動される誘導電動機を用いて説明しているが、これに限らず、直流電動機や単相電動機等の電動機を用いてもよい。
【0022】
[駆動装置]
図1に、本発明の一実施形態に係る駆動装置10を備えた電動機駆動システム1のブロック図を示す。同図に示すように、電動機駆動システム1は、駆動装置10の他に、三相交流電源2から供給される三相交流電圧を整流・平滑して直流電圧を出力する整流部3および平滑コンデンサ4と、整流・平滑された直流電圧を駆動装置10の制御下で可変電圧かつ可変周波数の三相交流電圧に変換するインバータ部5と、インバータ部5から出力された三相交流電圧で駆動される電動機(誘導電動機)6と、電動機6の各相に流れる三相交流電流iU、iWを検出する電流センサ7と、電動機6の回転角速度ω(本発明の「回転速度」に相当)を検出するエンコーダ8とを備えている。
電流センサ7で検出された三相交流電流iU、iW、およびエンコーダ8で検出された回転角速度ωは、駆動装置10にフィードバックされる。
【0023】
駆動装置10は、後述するマップ(NTマップ)が格納されている記憶部11と、電動機6の目標回転角速度ω*(本発明の「目標回転速度」に相当)等を設定する目標設定部12と、回転角速度ωおよびトルクTの変化のさせ方を仮決めした初期軌道を決定する初期軌道決定部13と、初期軌道を最適化して目標軌道を導出する目標軌道導出部14と、目標軌道に従ってトルクTおよび回転角速度ωを制御する制御部15とを備えている。
【0024】
記憶部11には、電動機6の回転角速度ω、トルクT、損失または効率の相互関係により規定された二次元のマップ(図2、図3参照)が格納されている。
これらのマップは、駆動装置10により電動機6を駆動させる前に、電動機6の入出力特性に基づいて作成されたものであり、電動機6に存在するすべての損失を含んでいる。具体的には、損失および効率は、電動機6に対する入力電力と出力電力の実測値に基づいて算出され、そのときの回転角速度ωおよびトルクTは、エンコーダ8およびトルクセンサにより検出される。上記損失の算出等は、電動機6に接続した負荷の大きさを変えながら行われる。これにより、電動機6の仕事量を任意に変更させることができるので、電動機6の任意の測定点における回転角速度ω、トルクT、損失および効率を得ることができる。
このようにして得られた複数の測定点のうち、損失が同じになる測定点同士を結んだものが図2に示すマップであり、効率が同じになる測定点同士を結んだものが図3に示すマップである。
【0025】
目標設定部12は、加速または減速開始時の第1時刻t0から所定時間経過した加速または減速終了時の第2時刻tnと、第2時刻tnにおける電動機6の目標回転角速度ω*とを外部からの指令信号に基づいて設定する。
また、目標設定部12は、アクセル操作等により加速または減速中に指令信号を受信した場合、受信時を第1時刻t0として、新たに第2時刻tnおよび第2時刻tnにおける目標回転角速度ω*を設定する。
【0026】
初期軌道決定部13は、記憶部11に格納されているマップにおいて、第1時刻t0における動作点p0と、第2時刻tnにおける動作点pnと、第1時刻t0と第2時刻tnの間の時刻における複数(n−1個)の動作点とを設定する。これにより、動作点p0、動作点pn、および動作点p0と動作点pnの間の動作点で構成された初期軌道L1が決定される(図4参照)。
具体的には、まず、目標設定部12が指令信号を受信した後にエンコーダ8により検出された回転角速度ω0と、電流センサ7で検出された三相交流電流iU、iWから算出したトルクT0とに基づいて第1時刻t0における動作点p0がマップ上に設定される。
続いて、目標回転角速度ω*等に応じて仮決めした第2時刻tnにおける回転角速度ωnと、トルクT0から一定の割合で変化させる等して仮決めした第2時刻tnにおけるトルクTnとに基づいて第2時刻tnにおける動作点pnがマップ上に設定される。
そして、第1時刻t0と第2時刻tnの間で時間的にn等分されたn−1個の動作点がマップ上に設定され、初期軌道L1が決定される。
この初期軌道L1は、回転角速度ωおよびトルクTの変化のさせ方を仮決めしたものであり、該初期軌道L1を構成する全動作点p0〜pnにおける損失(または効率)の和が、第1時刻t0から第2時刻tnにおいて回転角速度ωをω0からωnまで変化させた際に発生する電動機6の損失(または効率)となる。
【0027】
目標軌道導出部14は、初期軌道L1を構成する全動作点p0〜pnにおける損失の和が最小(または効率の和が最大)となるように、全動作点p0〜pnのうち動作点p0以外のn個の動作点について最適化を行って目標軌道L2を導出する。
具体的には、目標軌道導出部14は、マップに基づいて損失の和が小さく(または効率の和が大きく)なるように、動作点毎に回転角速度ωおよびトルクTを微小変化させ、初期軌道L1を構成する動作点を修正して初期軌道L1を更新する。そして、更新後の軌道と更新直前の軌道との損失(または効率)の和の変化量が、求められる精度と計算時間との兼ね合いにより定められた許容範囲内に収まるまで更新を繰り返し、最終的に得られた軌道を目標軌道L2とする。なお、目標軌道L2では、ωn=ω*となる。
【0028】
制御部15は、目標軌道L2に従って回転角速度ωをω0からωn(=ω*)まで変化させるために、インバータ部5を制御して、電動機6のトルクTおよび回転角速度ωを制御する。
具体的には、制御部15は、エンコーダ8で検出された回転角速度ωと、電流センサ7で検出された三相交流電流iU、iWから算出したトルクTとが目標軌道L2に従って変化するように、インバータ部5を制御する。なお、トルクTは、電流センサ7で検出された三相交流電流iU、iWから算出する替わりに、トルクセンサを設け、該トルクセンサにより検出してもよい。
【0029】
上記のように、本実施形態に係る駆動装置10によれば、電動機6の入出力特性から得られた該電動機6の回転角速度ωと、トルクTと、損失または効率との相互関係により規定されたマップに基づいて、トルクTおよび回転角速度ωの変化のさせ方に相当する目標軌道L2が導出されるので、電動機6に存在するすべての損失が考慮された最適なトルクTおよび回転角速度ωを導出することができ、電動機6の損失を最小化(効率を最大化)することができる。
【0030】
[駆動方法]
次に、本実施形態に係る電動機の駆動方法について具体的に説明する。
なお、以下の説明では、減速開始時の第1時刻t0から所定時間経過した減速終了時の第2時刻tnまでに、回転角速度ωをω0からωn(=ω*)まで減速させることとする(以下の計算式では、ωi=ω[i](ただし、i=0、1、・・・、n)とする)。
また、記憶部11には図2に示すように回転角速度ω、トルクTおよび損失の相互関係により規定されたマップが予め格納されていることとする。
【0031】
本実施形態に係る駆動方法は、図6に示すように、目標設定ステップ(S1)と、初期軌道決定ステップ(S2、S3)と、目標軌道導出ステップ(S4〜S7)と、制御ステップとに大別できる。
【0032】
まず、目標設定ステップでは、目標設定部12により第2時刻tnと、第2時刻tnにおける目標回転角速度ω*とが外部からの指令信号に基づいて設定される(S1)。
【0033】
続いて、初期軌道決定ステップでは、初期軌道決定部13により、第1時刻t0における動作点p0と、第2時刻tnにおける動作点pnと、第1時刻t0と第2時刻tnの間の時刻におけるn−1個の動作点とが設定される(S2)。そして、図4に示すように、記憶部11に格納されているマップ上に初期軌道L1が描かれる(S3)。
【0034】
続いて、目標軌道導出ステップでは、目標軌道導出部14により、後述する評価関数Jの値が小さくなるように回転角速度ωおよびトルクTを微小変化させて初期軌道L1を構成する動作点を修正する最適化が行われる。
【0035】
一般に、評価関数Jは、nステップからなるトルクの目標値信号列ベクトルT*↑(文字の後に「↑」の記号を付した場合はベクトル表示であることを表す。以下同様。)
【数7】
と回転角速度の目標値信号列ベクトルy*↑
【数8】
を用いて次式で定義することができる。
なお、目標値信号列ベクトルT*↑は、最適化して求める各動作点における最適トルクを表しており、目標値信号列ベクトルy*↑は、最適化して求める動作点p0以外のすべての動作点における最適回転角速度を表している。
【数9】
上記(9)式において、J1は第2時刻tnにおいて目標回転角速度ω[n]*(=ω*)に到達するという制約条件を表したものであり、J2、J3は、それぞれ電動機6の電気的損失、機械的損失を表したものである。また、w1↓、w2↓(文字の後に「↓」の記号を付した場合は行列表示であることを表す。以下同様。)は、ともに重み関数(重み行列)である。
【0036】
本実施形態に係る電動機の駆動方法は、トルクTおよび損失の相互関係により規定されたマップに基づいて算出した電動機6の損失J4(J4については後述する。)を、上記(9)式のJ2およびJ3の代わりに用いて評価関数Jの値が小さくなるように最適化することで、電動機6に存在するすべての損失が考慮された最適なトルクTおよび回転角速度ωを導出しようとするものである。
【0037】
ここで、初期軌道L1を構成する任意の動作点pxにおける損失Pxは、次式で表わすことができる。
【数10】
また、動作点pxにおける回転角速度ωxおよびトルクTxを微小変化させた場合の損失は、次式のように、動作点pxの損失に関する項と、損失を回転角速度ωで偏微分した項と、損失をトルクTで偏微分した項で表わすことができる。
【数11】
さらに、上記(11)式は、回転角速度ωおよびトルクTの関数として次式で表わすことができる。
【数12】
上記(12)式において、回転角速度ωとトルクTに関する微分値は、記憶部11に格納されているマップに含まれている複数の測定点(線形補間等により回転角速度ω、トルクTおよび損失を導出した測定点間の点も含む。)に基づいて算出される。すなわち、上記(12)式の定数項F、G、hは、記憶部11に格納されているマップに含まれている複数の測定点に基づいて導出することができる。
上記(12)式では、図5に示すように、回転角速度ωおよびトルクTが変化する際(例えば、px→px1またはpx2)にどれだけ損失が変化するかの割合を求めている。
【0038】
上記(12)式から、初期軌道L1を構成する全動作点p0〜pnに対する損失Pは、次式で表わすことができる。
【数13】
また、以下に定義するベクトルα↑、行列β↓を用いて、回転角速度の目標値信号列ベクトルy*↑は次式で表わすことができる。
【数14】
上記(14)式において、a、bにおけるΔTSは、第1時刻t0から第2時刻tnを分割したときの各動作点の時間区間を表している。
上記(14)式を用いて、上記(13)式は次式で表わすことができる。
【数15】
したがって、損失Pは次式で表わすことができる。
【数16】
上記(16)式において、w3↓は重み関数(重み行列)である。
【0039】
上記(16)式で定義したJ4を上記(9)式のJ2およびJ3の代わりに用いて、評価関数Jは次式で表わすことができる。
【数17】
【0040】
上記(17)式のように評価関数Jが設定されると(S4)、続いて、該評価関数Jの値が小さくなるように評価関数Jの値の最適化が行われる(S5)。
ステップS5では、初期軌道L1を構成する動作点p0以外のn個の動作点に対して、損失の変化量が最も小さくなる測定点(線形補間等により回転角速度ω、トルクTおよび損失を導出した点も含む。)を導出し、上記(17)式の評価関数Jの値が小さくなるように、いくつかまたは全部の動作点を導出した測定点の位置に移動させる。これにより、動作点p0以外の初期軌道L1を構成するn個の動作点が修正され、初期軌道L1が更新される。
より具体的には、本実施形態に係る電動機の駆動方法では、上記(17)式における評価関数JにSchur Complimentを用いることで、最適化手法の一つであるLMI(線形行列不等式)最適化問題に帰着させ、それを解くことにより最適化を自動的に実行している。
【0041】
初期軌道L1の更新は、更新後の新たな軌道における評価関数Jの値と更新直前の軌道における評価関数Jの値との変化量が、許容範囲内に収まるまで繰り返し実行される(S6)すなわち、ステップS6では、これ以上更新しても、評価関数Jの値が変化しなくなるまで繰り返し実行される。
評価関数Jの値の変化量が許容範囲内に収まると(S6でYes)、そのときの軌道が目標軌道L2となる(S7)。なお、目標軌道L2では、ωn=ω*となる。
【0042】
続いて、制御ステップでは、制御部15により、エンコーダ8で検出された回転角速度ωと、電流センサ7で検出された三相交流電流iU、iWから算出したトルクTが目標軌道L2に従って変化するように、インバータ部5が制御される。これにより、電動機6の回転角速度ωが目標軌道L2に従ってω0からω*まで減速される。
【0043】
上記のように、本実施形態に係る電動機の駆動方法によれば、電動機6の入出力特性から得られた該電動機6の回転角速度ωと、トルクTと、損失との相互関係により規定されたマップに基づいて、評価関数Jの値が最小となるような目標軌道L2が導出されるので、電動機6に存在するすべての損失が考慮された最適なトルクTおよび回転角速度ωが導出される。したがって、本実施形態に係る電動機の駆動方法によれば、目標軌道L2に従ってトルクTおよび回転角速度ωを制御することで電動機6の損失を最小化することができる。
【0044】
以上、本発明に係る電動機の駆動方法および駆動装置の好ましい実施形態について説明したが、本発明は上記実施形態の構成に限定されるものではない。
【0045】
例えば、上記実施形態に係る駆動方法では、評価関数Jの値を最小化するための最適化手法としてLMIを用いているが、これに限らず任意の最適化手法を用いることができる。
【0046】
また、上記実施形態に係る駆動方法では、評価関数Jの値の変化量が許容範囲内に収まったときの軌道を目標軌道L2としているが、評価関数Jの値の変化量が大きくなった場合には、更新直前の軌道を目標軌道L2としてもよい。
【0047】
さらに、上記実施形態に係る駆動方法では、損失を表す評価関数Jを設定し、該電動機6の回転角速度ω、トルクTおよび損失の相互関係により規定されたマップ(図2参照)に基づいて評価関数Jの値を最適化しているが、効率を表す評価関数を設定し、回転角速度ω、トルクTおよび効率の相互関係により規定されたマップ(図3参照)に基づいて効率を表す評価関数の値を最適化してもよい。効率を表す評価関数の場合、該評価関数の値が最大となるように最適化を行うことで、目標軌道L2を導出することができる。
【0048】
また、上記実施形態に係る駆動方法および駆動装置では、回転角速度ω、トルクT、損失または効率の相互関係により規定されたマップに基づいて、最適な回転角速度ωを導出しているが、回転角速度ωを回転速度や回転数で表わしたマップに基づいて、最適な回転速度や回転数を導出してもよい。なお、回転速度や回転数も本発明の「回転速度」に含まれる。
【0049】
さらに、上記実施形態に係る駆動方法および駆動装置では、第1時刻t0と第2時刻tnの間で時間的にn等分されたn−1個の動作点がマップ上に設定し、初期軌道L1を決定しているが、マップ上で動作点間の距離が離れているところは、線形補間等により導出した点を動作点として追加して初期軌道L1を決定してもよい。
【0050】
さらに、上記実施形態に係る駆動方法および駆動装置では、電動機6として三相交流電圧で駆動される誘導電動機6を用いているため三相交流電源2およびインバータ部5が必要になるが、電動機6として直流電動機や単相電動機を用いる場合は、三相交流電源2およびインバータ部5に替えて所望の直流電圧や単相交流電圧を生成する電源部が必要になる。
【符号の説明】
【0051】
1 電動機駆動システム
2 三相交流電源
3 整流部
4 平滑コンデンサ
5 インバータ部
6 電動機
7 電流センサ
8 トルクセンサ
9 エンコーダ
10 駆動装置
11 記憶部
12 目標設定部
13 初期軌道決定部
14 目標軌道導出部
15 制御部
【特許請求の範囲】
【請求項1】
電動機の回転速度を変化させ、第1時刻から所定時間経過した第2時刻において目標回転速度となるように前記電動機を駆動させる電動機の駆動方法であって、
前記目標回転速度を設定する目標設定ステップと、
前記電動機の入出力特性から得られた該電動機の回転速度と、トルクと、損失または効率との相互関係により規定されたマップにおいて、前記第1時刻の動作点と前記第2時刻の動作点とを設定するとともに、前記第1時刻の動作点と、前記第2時刻の動作点と、前記第1時刻と前記第2時刻の間の時刻における複数の動作点とで構成された初期軌道を決定する初期軌道決定ステップと、
前記初期軌道を構成する全動作点における前記損失の和が最小となるように、または前記初期軌道を構成する全動作点における前記効率の和が最大となるように、前記マップに基づいて前記初期軌道を構成する動作点を修正する最適化を行って目標軌道を導出する目標軌道導出ステップと、
前記目標軌道に従って前記電動機のトルクおよび回転速度を制御する制御ステップと、
を含むことを特徴とする電動機の駆動方法。
【請求項2】
前記目標軌道導出ステップは、
前記初期軌道を構成する動作点のうち、前記第1時刻の動作点以外のすべての動作点について最適化を行うことを特徴とする請求項1に記載の電動機の駆動方法。
【請求項3】
前記目標軌道導出ステップは、
前記損失の和または前記効率の和を、前記電動機の回転速度およびトルクを変数とした評価関数で表し、該評価関数の値を前記マップに基づいて最適化することにより、前記初期軌道の最適化を行うことを特徴とする請求項1または2に記載の電動機の駆動方法。
【請求項4】
電動機の回転速度を変化させ、第1時刻から所定時間経過した第2時刻において目標回転速度となるように前記電動機を駆動させる駆動装置であって、
前記目標回転速度を設定する目標設定部と、
前記電動機の入出力特性から得られた該電動機の回転速度と、トルクと、損失または効率との相互関係により規定された複数の動作点を含むマップが格納された記憶部と、
前記記憶部に格納されている前記マップにおいて、前記第1時刻の動作点と前記第2時刻の動作点とを設定するとともに、前記第1時刻の動作点と、前記第2時刻の動作点と、前記第1時刻と前記第2時刻の間の時刻における複数の動作点とで構成された初期軌道を決定する初期軌道決定部と、
前記初期軌道を構成する全動作点における前記損失の和が最小となるように、または前記初期軌道を構成する全動作点における前記効率の和が最大となるように、前記マップに基づいて前記初期軌道を構成する動作点を修正する最適化を行って目標軌道を導出する目標軌道導出部と、
前記目標軌道に従って前記電動機のトルクおよび回転速度を制御する制御部と、
を備えたことを特徴とする駆動装置。
【請求項1】
電動機の回転速度を変化させ、第1時刻から所定時間経過した第2時刻において目標回転速度となるように前記電動機を駆動させる電動機の駆動方法であって、
前記目標回転速度を設定する目標設定ステップと、
前記電動機の入出力特性から得られた該電動機の回転速度と、トルクと、損失または効率との相互関係により規定されたマップにおいて、前記第1時刻の動作点と前記第2時刻の動作点とを設定するとともに、前記第1時刻の動作点と、前記第2時刻の動作点と、前記第1時刻と前記第2時刻の間の時刻における複数の動作点とで構成された初期軌道を決定する初期軌道決定ステップと、
前記初期軌道を構成する全動作点における前記損失の和が最小となるように、または前記初期軌道を構成する全動作点における前記効率の和が最大となるように、前記マップに基づいて前記初期軌道を構成する動作点を修正する最適化を行って目標軌道を導出する目標軌道導出ステップと、
前記目標軌道に従って前記電動機のトルクおよび回転速度を制御する制御ステップと、
を含むことを特徴とする電動機の駆動方法。
【請求項2】
前記目標軌道導出ステップは、
前記初期軌道を構成する動作点のうち、前記第1時刻の動作点以外のすべての動作点について最適化を行うことを特徴とする請求項1に記載の電動機の駆動方法。
【請求項3】
前記目標軌道導出ステップは、
前記損失の和または前記効率の和を、前記電動機の回転速度およびトルクを変数とした評価関数で表し、該評価関数の値を前記マップに基づいて最適化することにより、前記初期軌道の最適化を行うことを特徴とする請求項1または2に記載の電動機の駆動方法。
【請求項4】
電動機の回転速度を変化させ、第1時刻から所定時間経過した第2時刻において目標回転速度となるように前記電動機を駆動させる駆動装置であって、
前記目標回転速度を設定する目標設定部と、
前記電動機の入出力特性から得られた該電動機の回転速度と、トルクと、損失または効率との相互関係により規定された複数の動作点を含むマップが格納された記憶部と、
前記記憶部に格納されている前記マップにおいて、前記第1時刻の動作点と前記第2時刻の動作点とを設定するとともに、前記第1時刻の動作点と、前記第2時刻の動作点と、前記第1時刻と前記第2時刻の間の時刻における複数の動作点とで構成された初期軌道を決定する初期軌道決定部と、
前記初期軌道を構成する全動作点における前記損失の和が最小となるように、または前記初期軌道を構成する全動作点における前記効率の和が最大となるように、前記マップに基づいて前記初期軌道を構成する動作点を修正する最適化を行って目標軌道を導出する目標軌道導出部と、
前記目標軌道に従って前記電動機のトルクおよび回転速度を制御する制御部と、
を備えたことを特徴とする駆動装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−93986(P2013−93986A)
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願番号】特願2011−234854(P2011−234854)
【出願日】平成23年10月26日(2011.10.26)
【出願人】(503027931)学校法人同志社 (346)
【Fターム(参考)】
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願日】平成23年10月26日(2011.10.26)
【出願人】(503027931)学校法人同志社 (346)
【Fターム(参考)】
[ Back to top ]