
電動歯ブラシ
【課題】接触型センサ部である操作部を有する電動歯ブラシにおいて意図した入力かどうかを区別して動作制御する。
【解決手段】電動歯ブラシ1は、使用者により一部が把持される本体部2と、本体部に交換可能に取付けられるブラシ部品21と、を備え、本体部は、把持される部分を除いた部分に配置され、且つ外部からの操作を受付けるための接触型センサ部のスイッチSWと、接触型センサ部により受付けた操作に従って電動歯ブラシの動作を制御するための制御部と、を含み、制御部は、接触型センサ部により第1操作を受付けた場合に、一定時間、操作受付け可能である旨を出力し、接触型センサ部により一定時間において受付けた第2操作が所定パターンの操作である場合に、当該第2操作に従って動作を制御する。
【解決手段】電動歯ブラシ1は、使用者により一部が把持される本体部2と、本体部に交換可能に取付けられるブラシ部品21と、を備え、本体部は、把持される部分を除いた部分に配置され、且つ外部からの操作を受付けるための接触型センサ部のスイッチSWと、接触型センサ部により受付けた操作に従って電動歯ブラシの動作を制御するための制御部と、を含み、制御部は、接触型センサ部により第1操作を受付けた場合に、一定時間、操作受付け可能である旨を出力し、接触型センサ部により一定時間において受付けた第2操作が所定パターンの操作である場合に、当該第2操作に従って動作を制御する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は電動歯ブラシに関し、特に、ユーザ操作を受付ける接触型センサ部を備える電動歯ブラシに関する。
【背景技術】
【0002】
一般に電動歯ブラシには、ユーザ操作を受付ける入力装置として電動歯ブラシの筐体に機械式スイッチなどを用いたものが多い。しかし、機械式スイッチの場合、スイッチ部と筐体の間に隙間が出来るため、その部分に汚れが溜まり、清掃もしにくく、また、機械式スイッチを配置する空間が必要なため、筐体の細い箇所や他部品が配置される箇所にはスイッチを配置することが困難である。
【0003】
このような課題を解決するために、入力装置として静電容量方式であるタッチスイッチなどを用いるものがある。この方式は、電極を筐体内部に設けることで筐体の外部と内部とを分離できるため防水性が良く、加工や追加機械部品が不要なためコストがかからない。
【0004】
静電容量方式の入力装置を手持ち型機器に適用したものとしては、特許文献1(特開昭60−114206号公報)の電子メロディー発生器付き歯ブラシ、特許文献2(特表2006−520212号公報)の手持ち式器具、特許文献3(特開平5−235733号公報)の容量性オン/オフスイッチを有するパーソナルケア装置がある。
【0005】
静電容量方式の入力装置では、静電容量の変化を入力として用いるから、手持ち型機器の場合には筐体部分を持ち替える際に意図せずに入力装置にタッチしてしまい、誤動作の原因となる。
【0006】
意図しないタッチによる誤動作を回避する方法として、ある部位の入力を別の部位の入力に基づき拒否または認識する方法が、たとえば特許文献4(特開2009−217814号公報)によるタッチ表面の端部領域におけるタッチ接触の選択的拒否の方法、特許文献5(特開2010−266133号公報)による加熱調理器により提案されている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開昭60−114206号公報
【特許文献2】特表2006−520212号公報
【特許文献3】特開平5−235733号公報
【特許文献4】特開2009−217814号公報
【特許文献5】特開2010−266133号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
意図しないタッチによる誤動作を回避するための上述の方法を電動歯ブラシに適用する場合、ユーザは入力装置を目視しながら特定の部位を選択する必要がある。しかし、電動歯ブラシでは入力装置は柄部に設けられるのが一般的であるから、歯磨き動作中は、ユーザは柄部を手で把持し、かつ柄部が顔に近接している状態であるため、入力装置を目視するのは困難である。したがって、電動歯ブラシに、意図しないタッチによる誤動作を回避するための上述の方法を適用することは困難である。
【0009】
それゆえに、本発明の目的は、接触型センサ部を操作部として備える電動歯ブラシにおいて意図した入力かどうかを区別して動作制御する電動歯ブラシを提供することである。
【課題を解決するための手段】
【0010】
この発明に係る電動歯ブラシは、使用者により一部が把持される本体部と、本体部に交換可能に取付けられるブラシ部と、を備える。
【0011】
本体部は、本体部の把持される部分を除いた部分に配置され、且つ外部からの操作を受付けるための接触型センサ部と、接触型センサ部により受付けた操作に従って電動歯ブラシの動作を制御するための制御部と、を含む。
【0012】
制御部は、接触型センサ部により第1操作を受付けた場合に、一定時間、操作受付け可能である旨を出力し、接触型センサ部により一定時間において受付けた第2操作が所定パターンの操作である場合に、当該第2操作に従って動作を制御する。
【発明の効果】
【0013】
本発明によれば、電動歯ブラシは、外部からの操作を受付けるための接触型センサ部を備え、接触型センサ部を介した操作が意図した入力操作かどうかを区別して動作を制御する。
【図面の簡単な説明】
【0014】
【図1】本実施の形態に係る電動歯ブラシの内部構成例を示す断面図である。
【図2】本実施の形態に係る電動歯ブラシを含むシステムのブロック図である。
【図3】本実施の形態に係るスイッチの構成を説明する図である。
【図4】本実施の形態に係るスイッチと出力部の本体部の筐体における配置例を示す図である。
【図5】本実施の形態に係るスイッチ操作に従う電動歯ブラシ制御のための機能構成図である。
【図6】本実施の形態に係る処理のフローチャートである。
【図7】本実施の形態に係る処理のフローチャートである。
【図8】本実施の形態に係る電極部への接触態様を説明する図である。
【図9】本実施の形態に係る電極部への接触態様を説明する図である。
【図10】本実施の形態に係るスイッチにおける電極の配置例を示す図である。
【図11】本実施の形態に係る筐体の電極に対応する部分の形状を示す図である。
【図12】本実施の形態に係る筐体の電極に対応する部分の形状を示す図である。
【図13】本実施の形態に係る筐体の電極に対応する部分の形状を示す図である。
【図14】本実施の形態に係る筐体の電極に対応する部分の形状を示す図である。
【図15】本実施の形態に係る筐体の電極に対応する部分の形状を示す図である。
【図16】本実施の形態に係る基板に関連付けて電極の配置例を示す図である。
【図17】本実施の形態に係る基板に関連付けて電極の配置例を示す図である。
【図18】本実施の形態に係る基板に関連付けて電極の配置例を示す図である。
【図19】本実施の形態に係る基板に関連付けて電極の配置例を示す図である。
【図20】本実施の形態に係る並列した入力電極の静電容量値の変化に基づく操作種類の検出例を示す図である。
【図21】本実施の形態に係る並列した入力電極の静電容量値の変化に基づく操作種類の検出例を示す図である。
【図22】本実施の形態に係る並列した入力電極の静電容量値の変化に基づく操作種類の検出例を示す図である。
【図23】本実施の形態に係る入力電極を並列させる態様を示す図である。
【図24】本実施の形態に係る入力電極を並列させる他の態様を示す図である。
【図25】本実施の形態に係る電極部に対する被水による影響を防止する機能を説明する図である。
【図26】本実施の形態に係る電極部に対する被水による影響を防止する機能を説明する図である。
【発明を実施するための形態】
【0015】
以下、この発明の実施の形態について図面を参照しながら説明する。なお、各図中、同一符号は同一または相当部分を指す。
【0016】
本実施の形態では、筐体表面に植毛されたブラシを有する電動歯ブラシを説明するが、実施の形態の構成は、口腔ケア(歯の洗浄・ブラッシング・歯茎マッサージなど)に用いることが可能な装置一般に適用することができる。具体的には、口腔ケアに用いる材料としては、歯ブラシに代替してスポンジ、ゴム、エラストマなどの樹脂部品またはブラシとこれら樹脂部品が複合された口腔ケア部材を用いた装置に適用することができる。
【0017】
<構成について>
図1〜図3を参照して、電動歯ブラシの構成を説明する。
【0018】
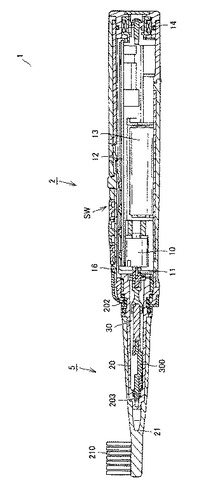
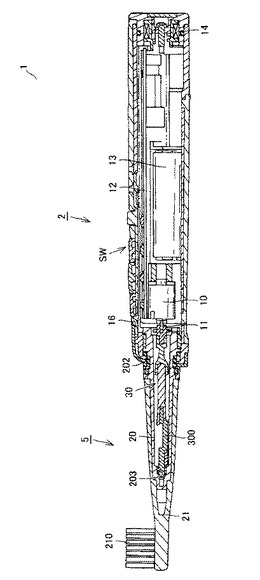
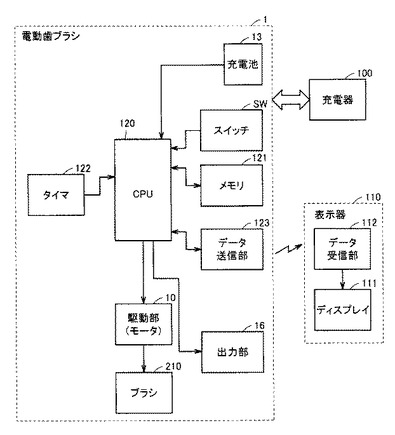
図1は、電動歯ブラシの内部構成例を示す断面図であり、図2は、電動歯ブラシを含むシステムのブロック図であり、図3は、電動歯ブラシのスイッチSWを周辺部と関連付けて説明するための図である。
【0019】
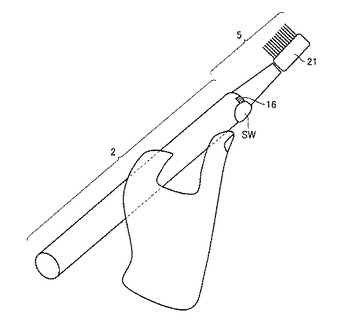
電動歯ブラシ1は、駆動源であるモータ10を内蔵する本体部2と、モータ10の駆動により振動する振動部材5とを備える。したがって、モータ10の回転数は、電動歯ブラシ本体の振動数に対応する。本体部2は、概ね円柱形状の筐体を有し、筐体の一部は歯を磨く際に使用者が把持する、すなわち手で握るためのハンドル部を兼ねる。
【0020】
さらに、電動歯ブラシ1に関連して、本体部2が載置されて、載置された電動歯ブラシ1を充電するための充電器100と、ブラッシング結果など各種情報を出力するための表示器110とが設けられる。
【0021】
本体部2の筐体には、電源のオン/オフおよび後述のモータ10の動作モードの切替えなどを指示するための外部からの操作を受付けるためのスイッチSWが設けられる。また本体部2は筐体内部において、モータ10(たとえば、直流モータ)、駆動回路12、各部に電力を供給するための定格出力2.4Vの電源である充電池13、充電用のコイル14などを有する。充電池13は、充電器100に本体部2を載置するだけで、電磁誘導により非接触で充電される。駆動回路12は、図示されない基板に搭載された各種演算および制御を実行するCPU(Central Processing Unit)120、プログラムおよび各種設定値が格納されるメモリ121、タイマ122、データ送信部123などを有する。データ送信部123は、表示器110のデータ受信部112との間で無線通信を行なう。表示器110は、データ受信部112で受信したブラッシング結果などのデータを出力するためのディスプレイ111を備える。
【0022】
また、本体部2は、スイッチSWが操作受付け可能である旨を出力するために出力部16を一体的に備える。出力部16は、音声出力部(ブザー、スピーカ)、ライト(LED(Light Emitting Diode)など)などを含む。
【0023】
振動部材5は、本体部2側に固定されているステム部20と、このステム部20に装着されるブラシ部品21とを備える。ブラシ部品21の先端にはブラシ210が植毛されている。ブラシ部品21は消耗部品ゆえ、新品に交換できるよう、ステム部20に対して着脱自在な構成となっている。
【0024】
振動部材5のブラシ部品21は、ブラシ210が配置されたブラシ部、および、本体部2側に位置する柄部を含む。なお、柄部の全てまたは一部は、本体に含まれる構成であってもよい。
【0025】
ステム部20は、樹脂材からなる。ステム部20は、エラストマからなる弾性部材202を介して本体部2に取り付けられている。ステム部20は、先端(ブラシ側の端部)が閉じた筒状の部材であり、筒の内部の先端に軸受203を有している。モータ10の回転軸11に連結された偏心軸30の先端が、ステム部20の軸受203に挿入される。この偏心軸30は、軸受203の近傍に重り300を有しており、偏心軸30の重心はその回転中心からずれている。なお、偏心軸30の先端と軸受203の間には微小なクリアランスが設けられている。
【0026】
動作においては、CPU120は動作モードに応じた駆動信号(たとえばPWM(Pulse Width Modulation)信号)をモータ10に供給することにより、モータ10が回転し、連動して回転軸11が回転する。回転軸11の回転に伴って偏心軸30も回転するが、偏心軸30は重心がずれているために回転中心の回りに旋回するような運動を行なう。よって、偏心軸30の先端の動きが軸受203の内壁に伝わり、ステム部20とそれに装着されたブラシ部品21とを高速に振動(運動)させることができる。
【0027】
使用者は、本体部2をの筐体の一部を把持しながら振動するブラシ210を歯に当てることで、ブラッシングを行なう。
【0028】
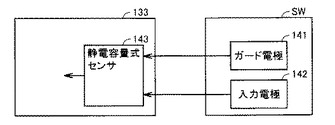
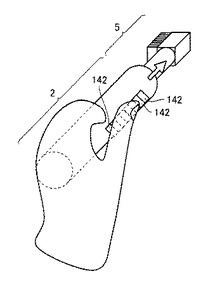
図3を参照して、スイッチSWの構成を説明する。スイッチSWは接触型センサであって、スイッチSWは電極部を有する。電動歯ブラシ1は電極部の静電容量値を測定するための静電容量式センサ143を有する。電極部は、ガード電極141および入力電極142を有する。ガード電極141は、入力電極142の周囲に配置される。
【0029】
静電容量式センサ143は後述する操作受付部133の1つの機能として設けられる。動作において、各電極に人体などの導体が接触(タッチ)すると導体と電極との間における静電容量は、静電容量式センサ143によって測定される。その測定値によって、接触の有無が判定される。
【0030】
本実施の形態では、操作の判別精度を高めるために電極部はガード電極141と入力電極142の両方を備えるとしているが、電極部は入力電極142のみからなるとしてもよい。
【0031】
図4には、スイッチSWと出力部16の本体部2の筐体における配置例が示される。本実施の形態では、スイッチSWは本体部2の筐体の歯ブラシ時に把持される部分を除いた部分に配置される。また、出力部16が音声,ライトによる場合には、出力部16も、本体部2の把持される部分を除いた部分に設けられる。
【0032】
図4では、本体部2の柱状筐体の表面において、本体部2と振動部材5との接合側の端部に配置されるので、スイッチSWを操作するには、使用者は歯ブラシ時に本体部2を握る指を意図的に伸ばす必要があり、スイッチSWに対する意図しない接触を回避することができる。また、スイッチSWは本体部2側に設けられるので、操作によって振動部材5の振動が妨げられることはない。
【0033】
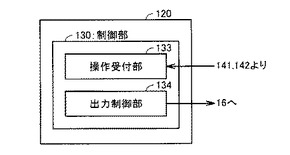
図5には、本実施の形態によるスイッチSWの操作に従う電動歯ブラシ制御のための機能構成図である。図5を参照してCPU120は、スイッチSWがタッチされることにより受付けた操作内容に従って電動歯ブラシ1の動作を制御するための制御部130を含む。制御部130は、スイッチSWが操作を受付けた場合に、一定時間、操作受付け可能である旨を出力部16を制御して出力させるための出力制御部134を有する。出力制御部134は、出力部16による音声の出力、またはライトの点滅,点灯などを制御する。
【0034】
ここでは出力制御部134は出力部16の動作を制御するとしているが、モータ10の回転を制御して、ブラシ部品21の振動(運動)モードを変更させるとしてもよい。
【0035】
図5の機能は、CPU120が実行するプログラムと回路の組合せにより提供されるとしているが、プログラムのみ、または回路部品のみにより提供されるとしてもよい。
【0036】
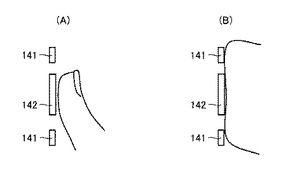
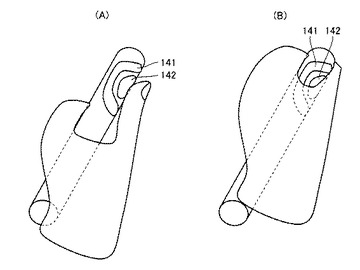
図6と図7には、本実施の形態に係る処理のフローチャートが示される。これらフローチャートは予めプログラムとしてメモリ121に格納されており、CPU120がプログラムをメモリ121から読出し、実行する。図8と図9には、スイッチSWに対する指の接触態様が例示される。
【0037】
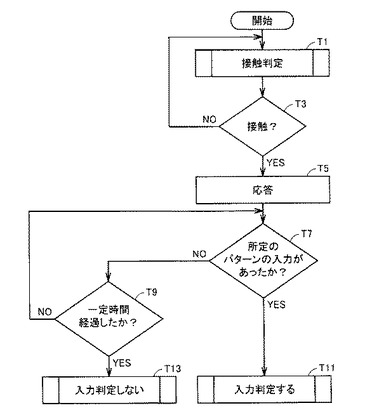
図6を参照して、操作受付部133によりスイッチSWに指(導体)が接触したか否かの接触判定が行われる(ステップT1)。制御部130は、判定により“非接触”が出力される場合には(ステップT3でNO)、ステップT1の処理を繰返すが、“接触”が出力される場合には(ステップT3でYES)、処理をステップT5に移行させる。
【0038】
“接触”が出力された場合には、出力制御部134は、出力部16を制御して音声、光などを所定の態様で一定時間出力する(ステップT5)。これにより、使用者に対して一定時間内にスイッチSWを操作すれば操作受付けされることをが報知される。
【0039】
なお、報知態様はこれに限定されず、ステップT5では、制御部130は、電動歯ブラシ1が有する複数種類の動作モードについて、“接触”と判定された第1操作を受付けたときは、操作を受付ける前の動作モードを、一定時間、他の種類の動作モードに切替えることで、報知してもよい。より具体的には、上述のように、モータ10に供給する駆動信号を切替え後の動作モードに応じた周波数に変化させることで、ブラシ部21の振動周波数を変化させて報知する。
【0040】
操作受付部133は、静電容量式センサ143からの上記の一定時間内における出力パターンが、所定パターンに一致するか否かを判定する(ステップT7、ステップT9でNO)。たとえば、静電容量式センサ143の出力が示す入力電極142の静電容量値の変化パターンを検出し、検出した変化パターンと所定操作の変化パターンとを比較し、比較結果に基づき所定操作がされたか否かを判定する。ここでは、所定操作は、1回タップ、2回タップ、スライド操作などを含み、所定操作の判定については後述する。
【0041】
一定時間内に所定操作がされたと判定すると(ステップT7でYES)、操作受付部133が当該所定操作を解析して、解析結果に基づき操作指示を出力する(ステップT11)。これにより、入力判定がされる。つまり、操作受付部133が受付た操作内容に従って電動歯ブラシ1の動作(モータ10の回転数など)を制御するための操作指示が使用者によって入力されたと判定される。
【0042】
一方、一定時間内に所定パターンの操作がされないと判定すると(ステップT7でNO、ステップT9でYES)、操作受付部133による入力判定はされない(ステップT13)。
【0043】
なお、一定時間が経過すると、音声の出力は停止し、ライトは消灯し、動作モードは元の動作モード(切り替え前の動作モード)に戻される。
【0044】
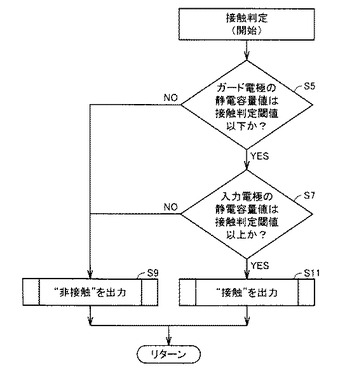
図7を参照して、図6の接触判定処理(ステップT1)について説明する。
まず、操作受付部133は静電容量式センサ143からの出力に含まれるガード電極141の静電容量値と、接触判定のための第1閾値とを比較し、比較結果に基づきガード電極141に導体が接触しているか否かを判定する(ステップS5)。具体的には、比較結果に基づき(静電容量値≦第1閾値)の条件が成立すると判定すると(ステップS5でYES)、後述するステップS7の処理に移行するが、当該条件は成立しないと判定すると(ステップS5でNO)、“非接触”を出力する(ステップS9)。
【0045】
スイッチSWの電極部が入力電極142のみからなる場合には、ステップS5では、入力電極142の静電容量値を用いて判定される。
【0046】
ステップS7では、操作受付部133は静電容量式センサ143からの出力に含まれる入力電極142の静電容量値と、接触判定のための第2閾値とを比較し、比較結果に基づき入力電極142に導体が接触しているか否かを判定する(ステップS7)。具体的には、比較結果に基づき(静電容量値≧第2閾値)の条件が成立すると判定すると(ステップS7でYES)、“接触”を出力する(ステップS11)。条件が成立しないと判定すると(ステップS7でNO)、“非接触”を出力する(ステップS9)。
【0047】
なお、第1および第2閾値は、メモリ121の所定領域に予め格納されていると想定するが、判定基準は測定された静電容量値に限定されず、単位時間あたりの静電容量値の変化値(たとえば、+10pf/sec)であってよく、または、それらを組合わせたものであってもよい。
【0048】
図6および図7の処理によれば、図8の(A)と図9の(A)のように意図的に入力電極142のみに指が接触している場合には、ガード電極141で接触していないと判定されて入力電極142について“接触”と判定されて第1操作が受付けされる。この場合には図6のステップT5以降の入力の判定を行なうにすることで、スイッチSWの意図的な操作(一定時間内の所定パターンによる第2操作)は受付されて、操作内容による電動歯ブラシ1の動作制御が可能となる。一方、図8の(B)と図9の(B)のように意図せずにスイッチSWに指または掌が接触するような場合には、ガード電極141で接触していると判定があっても入力電極142について“非接触”と判定されることになり、図6のステップT5以降の入力判定は行なわなれない。これにより、使用者が意図せずにスイッチSWにタッチした場合などの誤動作を防止できる。
【0049】
<電極の配置について>
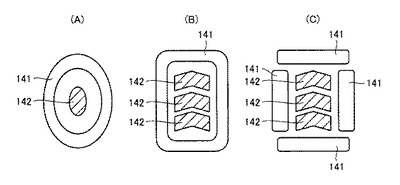
実施の形態に係るスイッチSWにおいては、第1電極である入力電極142の周囲に第2電極であるガード電極141が配置される。
【0050】
図10には、スイッチSWにおける電極の配置例が示される。図10の(A)によれば、入力電極142の周囲を、円形状の1個のガード電極141が入力電極142を囲むように配置される。
【0051】
図10の(B)では、並列する複数の入力電極142の周囲を、矩形状の1個のガード電極141が入力電極142を囲むように配置される。上述した第2操作の1種であるスライド操作は、並列配置される入力電極142の列が延びる方向と同一方向に指を滑らせる操作を指す。
【0052】
図10の(B)の矩形状のガード電極141は、図10の(C)に示すように、矩形の各辺に対応してガード電極141を個別に配置するとしてもよい。図10の(C)では、各辺に対応したガード電極141の形状・サイズ(電極面積)は同じであり、また各入力電極142も形状・サイズ(電極面積)は同じとしている。これにより、電極表面における導体の接触面積が同じであれば各電極における静電容量値は一致するから、接触判定が容易となる。
【0053】
<筐体の電極に対応する部分の形状>
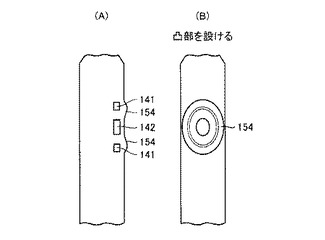
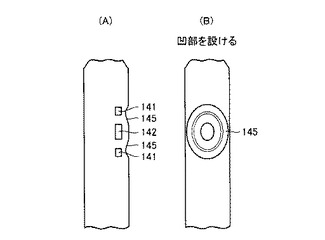
歯ブラシ時に本体部2を把持した使用者が、歯ブラシしながら指をスイッチSWに接触させる際に、指の触感で入力電極142とガード電極141を容易に判別できるように、筐体のガード電極141および入力電極142に対応する部分の形状を、図11〜図15に示すように異ならせる。
【0054】
図11〜図15の各図の(A)は、ガード電極141と入力電極142が配置された筐体部分の、本体部2の長手方向に延びる断面形状を模式的に示し、各図の(B)は当該図の(A)に対応した筐体部分の表面を模式的に示す。
【0055】
図11では、筐体表面のガード電極141に対応する部分に樹脂材料により凸部154形成し、図12で凹部145が形成される。これにより、ガード電極141と入力電極142の位置を指で触って判別することができる。
【0056】
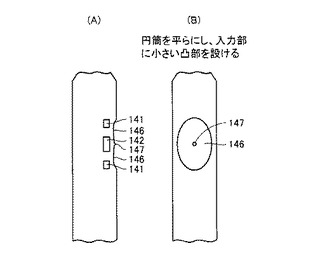
筐体の表面においてスイッチSWが設けられる面は曲面であるが、図13のように、スイッチSWが設けられる部分のみを平面146に形成し、その平面146の入力電極142に対応する部分には小さな凸部147を形成する。これにより、スイッチSWの位置と、スイッチSWにおける入力電極142の位置とを指で触って判別することができる。
【0057】
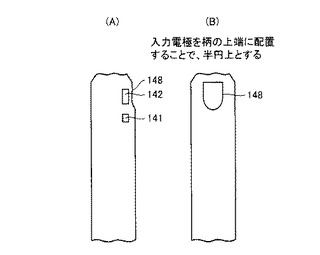
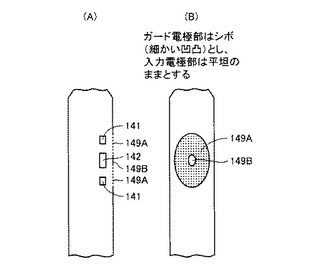
図14では、入力電極142を本体部2の端に配置し、筐体表面の入力電極142が設けられる部分のみ平面148に形成する。平面148は端部で半分となった半円形状を有する。図15では、筐体表面のガード電極141に対応する部分にシボ加工により細かい凸凹模様149Aを形成し、入力電極142に対応する部分は平面149Bに形成する。
【0058】
図14と図15の形状であれば、本体部2の筐体を形成する工程でにおいて、円筒型からそのまま型抜きすればよく、金型および成形にかかるコストを節約することができる。
【0059】
<電極の配置例>
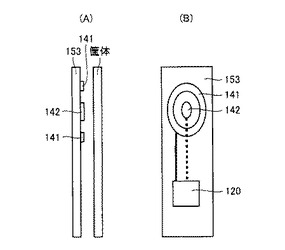
図16〜図19にはスイッチSWの電極の配置例が示される。図16の(A)は、ガード電極141と入力電極142が配置された筐体部分の、本体部2の長手方向に延びる断面形状を模式的に示す。図16の(B)は図16の(A)の基板153上における電極とCPU120間の配線パターンを示す。
【0060】
図16の(A)を参照して、筐体内部に収容されるCPU120など搭載した基板153の主面には、ガード電極141と入力電極142の電極パターンが形成される。基板153は、主面が筐体の内側面と対向するようにして収容される。この場合、電極パターンと筐体との間の空間(距離)に起因して精度よく静電容量を測定することが困難となる。
【0061】
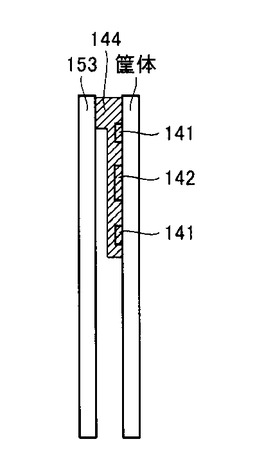
静電容量の測定精度を得るために、図17と図18に他の配置例を示す。図17では、電極パターンを基板153に代替して、筐体内側面に配置する。具体的には、透明電極膜として使用されるITO(Indium Tin Oxide)膜を用いてガード電極141と入力電極142の電極パターンが形成された導電性のシール144を、筐体内側面に貼り付ける。筐体内側面に貼り付けたシール144の一部は延伸し、基板153の主面上の配線パターンと接続される。この場合、電極パターンは直接に筐体内側面に形成されるから、精度よく静電容量を測定することが困難となる。
【0062】
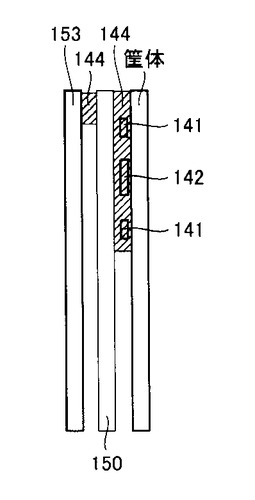
図18では、筐体内部において基板153が導電性のシャーシ150を用いて他の回路部と区分して収納される。基板153の主面はシャーシ150を介在させた状態で筐体内側面と対向する。シャーシ150の筐体内面側と対向する表面上には、ガード電極141と入力電極142の電極パターンが形成された導電性のシール144が貼り付けられる。そして、シャーシ150の裏面(すなわち、基板153の主面と対向する面)に貼付けられたシール144は基板153の主面上の配線パターンと接続される。これにより、ガード電極141と入力電極142は、シール144およびシャーシ150を介して基板153上の配線パターンと電気的に導通可能となる。
【0063】
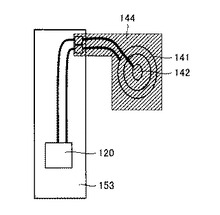
図19には、図17と図18において、ガード電極141と入力電極142の電極パターンが形成されたシール144を用いて、電極(ガード電極141,入力電極142)と基板153の主面上のCPU120との間を電気的に導通させるための配線パターンが例示される。
【0064】
<操作のパターン検出>
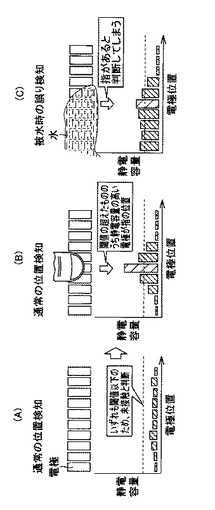
図20〜図22には、並列した各入力電極142の静電容量値の変化に基づき、第2操作の種類である操作パターンを検出する例が示される。各図では、上段に1列に並んだ入力電極142の列が模式的に示され、下段には静電容量値のグラフが示される。グラフの横軸には、上段の各入力電極142に対応して当該電極の列における位置がとられ、縦軸には測定される静電容量値が示される。
【0065】
操作受付部133は、静電容量式センサ143からの出力に基づき、スイッチSWの並列した各入力電極142の静電容量値の変化パターンに基づき、操作の種類を検出する。検出動作を、図20〜図22を参照し説明する。
【0066】
なお、ここでは、各入力電極142と静電容量式センサ143との間には個別に配線パターンが形成されて、静電容量式センサ143は各配線について当該配線が接続される入力ポートを有する。したがって、静電容量式センサ143は入力ポートの電位の変化に基づきポート番号を判別する。ポート番号を判別することにより、対応する入力電極142の列における位置を一意に判別する。
【0067】
まず、図20を参照して、入力電極142の列において操作された位置を検出する場合を説明する。
【0068】
図20の(A)では、1列に並んだ入力電極142のいずれも測定される静電容量値は上述の第2閾値(グラフ中の破線の値)未満であることから入力判定はされないが、図20の(B)のように1列に並んだ入力電極142の1つについて静電容量値が第2閾値以上である場合には、入力判定がされる。この入力判定では、静電容量式センサ143は各入力ポートの番号と当該ポートを介して測定した静電容量値を出力する。したがって、操作受付部133は、第2閾値以上である静電容量値が測定されたポート番号を判別する。判別した同一ポート番号の入力ポートの静電容量値の時間的変化パターンに基づき、当該変化パターンは1回タップまたは2回タップのパターンであるか否かを判別する。
【0069】
これに対し、図20の(C)のように、被水などして1列に並んだ入力電極142の複数個について静電容量値が第2閾値以上となるような場合には、入力判定はされない。
【0070】
これにより、入力電極142の列における1回タップまたは2回タップに応じた操作指示を生成し、生成した操作指示に従って、電動歯ブラシ1の動作を制御することができる。
【0071】
なお、1回のタップ操作と2回のタップ操作は次のように判別する。つまり、一定時間内に1回目のタップが検出されると、第2操作は“1回タップ操作”であると判定し、1回目のタップ操作後の所定時間内に2回目のタップ操作が判定されると、第2操作は“2回タップ操作”であると判定し直す。なお、1回目のタップが一定時間内の終了直前でなされた場合には2回目タップは一定時間外で検出されることになるが、本実施の形態では、この場合でも第2操作は“2回タップ操作”と判定する。つまり、1回目のタップが一定時間内に検出され、且つ2回目タップが1回目タップ後から所定時間内に検出されれば“2回のタップ操作”と判定する。
【0072】
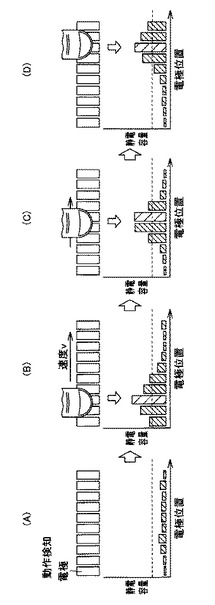
次に、図21を参照して、スライド操作について説明する。入力電極142の列における指のスライド移動の速度に基づきスライド操作を検出する。
【0073】
図21の(A)では、図20の(A)と同様に入力判定はされないケースが示される。図21の(B)〜(D)では、スライド操作による指の移動に連動した、静電容量値のピーク値の移動が示される。スライド操作がされると、静電容量値の変化については必ず隣接した入力電極142間で静電容量値のピーク値が移動し、且つピーク値の移動速度は一定以上となる。
【0074】
操作受付部133は、ピーク値が測定されるポート番号の変化速度を検出し、検出した移動速度が一定速度以上であると判定すると、スライド操作されたと判定し、スライド操作に対応した操作指示を出力する。
【0075】
ここでは、列の各入力電極142に対応したポート番号の数値は、当該列の入力電極142の並びに対応して順次に増加する(たとえば、1,2,3,4,5・・・と昇順に増加する)と想定する。したがって、ピーク値が測定されるポート番号を表す数値の単位時間当たりの増加量に基づき、単位時間当たりの移動量(距離)を算出し、ピーク値の移動速度を算出することができる。移動速度が一定速度以上であると判定すると、スライド操作されたと判定する。
【0076】
なお、同じスライド操作であっても、そのピーク値の移動速度に応じて、動作モードを切替える操作指示の種類を異ならせる、または、同じスライド操作であっても、そのピーク値の移動方向に応じて、動作モードを切替える操作指示の種類を異ならせる、または移動速度と方向の組合わせで操作指示の種類を異ならせるようにしてよい。
【0077】
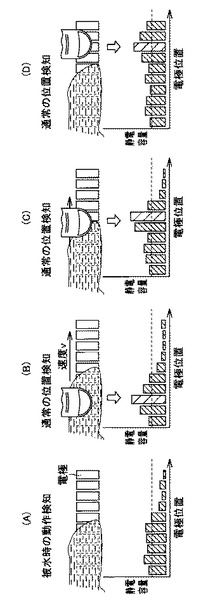
また、図22に示すように、入力電極142の列が被水した場合であっても、ピーク値移動速度の検出は可能である。つまり、電動歯ブラシ1は洗面所など被水しやすい環境で使用するために、スイッチSWが被水し易い。たとえば、図22の(A)〜(D)のように、入力電極142の列に水がかかる場合がある。この場合であっても、入力電極142にかかる水よりも接触する指の方が体積が大きいために、測定される静電容量値は水より指の方が大きくなり、指の接触による静電容量値のピーク値検出が可能となる。ピーク値が検出できることから操作位置の検出が可能であり、ピーク値の移動速度も測定できる。したがって、スライド操作の有無も判定することができる。
【0078】
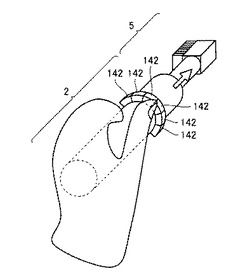
入力電極142を1列に並列させる態様としては、たとえば、図23のように本体部2の矢印の長手方向と同一方行に1列に並列させる態様、図24のように長手方向と交差(直交を含む)する方向に延びるように本体部2の円柱に周囲に沿って1列に並列させる態様とがある。
【0079】
<被水の影響を防止する機能>
図25と図26を参照して、本実施の形態におけるスイッチSWの電極部に対する被水による影響を防止する機能を説明する。
【0080】
図25の(A)には、本体部2の筐体表面にスイッチSWが配置される部分を被覆部材170で覆った状態が示され、図25の(B)には被覆部材170で覆った部分を、本体部2の長手方向と直交する方向に沿った断面が示される。電極部は、図16の(A)に示すように筐体と近接するよに基板153の筐体内面に近い端部に配置される。
【0081】
スイッチSWの電極部に対し被水があったとしても、静電容量の測定精度を維持できるようにガード電極141,入力電極142を含む電極部を可塑性(変形させていた外力を取り除くと元の形に戻ってしまう性質)の樹脂材料、たとえばスポンジ170Bとフィルム170Aとで覆う。これにより水が掛かっても水と電極部の距離がスポンジ170Bの厚み分だけ大きくなるため、静電容量の変化を小さくでき被水の影響を小さくすることができる(図26の(B)参照)。
【0082】
水の場合はスポンジ170Bを潰すほどの押圧力は生じないが、指の場合は押圧力によってスポンジ170Bは潰される(圧縮される)。そのためスポンジ170Bが介在するとしても指と筐体内部の基板153上の電極部との距離を接近させることができ操作の種類を判別するための静電容量値を測定できる(図26の(A)参照)。
【0083】
また、被水の影響をさらに小さくするために、可塑性のフィルム170Aに撥水性を付与するようにしてもよい。
【0084】
このように、本実施の形態に係る電動歯ブラシ1は、使用者により一部が把持される本体部2と、本体部に交換可能に取付けられるブラシ部品21と、を備え、本体部2は、本体部2の把持される部分を除いた部分に配置され、且つ外部からの操作を受付けるためのスイッチSWの接触型センサ部と、接触型センサ部により受付けた操作に従って電動歯ブラシ1の動作を制御するための制御部130と、を含む。制御部130は、接触型センサ部によって第1操作を受付けた場合に、一定時間、操作受付け可能である旨を出力する。そして、一定時間において受付けた第2操作が所定パターンの操作である場合に、当該第2操作に従って電動歯ブラシ1の動作を制御する。
【0085】
今回開示された実施の形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上記した説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。
【符号の説明】
【0086】
1 電動歯ブラシ、2 本体部、10 モータ、16 出力部、21 ブラシ部品、130 制御部、133 操作受付部、134 出力制御部、141 ガード電極、142 入力電極、143 静電容量式センサ、144 シール、145 凹部、146,148,149B 平面、147,154 凸部、149A 凸凹模様、150 シャーシ、153 基板、170 被覆部材、170A フィルム、170B スポンジ、SW スイッチ。
【技術分野】
【0001】
この発明は電動歯ブラシに関し、特に、ユーザ操作を受付ける接触型センサ部を備える電動歯ブラシに関する。
【背景技術】
【0002】
一般に電動歯ブラシには、ユーザ操作を受付ける入力装置として電動歯ブラシの筐体に機械式スイッチなどを用いたものが多い。しかし、機械式スイッチの場合、スイッチ部と筐体の間に隙間が出来るため、その部分に汚れが溜まり、清掃もしにくく、また、機械式スイッチを配置する空間が必要なため、筐体の細い箇所や他部品が配置される箇所にはスイッチを配置することが困難である。
【0003】
このような課題を解決するために、入力装置として静電容量方式であるタッチスイッチなどを用いるものがある。この方式は、電極を筐体内部に設けることで筐体の外部と内部とを分離できるため防水性が良く、加工や追加機械部品が不要なためコストがかからない。
【0004】
静電容量方式の入力装置を手持ち型機器に適用したものとしては、特許文献1(特開昭60−114206号公報)の電子メロディー発生器付き歯ブラシ、特許文献2(特表2006−520212号公報)の手持ち式器具、特許文献3(特開平5−235733号公報)の容量性オン/オフスイッチを有するパーソナルケア装置がある。
【0005】
静電容量方式の入力装置では、静電容量の変化を入力として用いるから、手持ち型機器の場合には筐体部分を持ち替える際に意図せずに入力装置にタッチしてしまい、誤動作の原因となる。
【0006】
意図しないタッチによる誤動作を回避する方法として、ある部位の入力を別の部位の入力に基づき拒否または認識する方法が、たとえば特許文献4(特開2009−217814号公報)によるタッチ表面の端部領域におけるタッチ接触の選択的拒否の方法、特許文献5(特開2010−266133号公報)による加熱調理器により提案されている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開昭60−114206号公報
【特許文献2】特表2006−520212号公報
【特許文献3】特開平5−235733号公報
【特許文献4】特開2009−217814号公報
【特許文献5】特開2010−266133号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
意図しないタッチによる誤動作を回避するための上述の方法を電動歯ブラシに適用する場合、ユーザは入力装置を目視しながら特定の部位を選択する必要がある。しかし、電動歯ブラシでは入力装置は柄部に設けられるのが一般的であるから、歯磨き動作中は、ユーザは柄部を手で把持し、かつ柄部が顔に近接している状態であるため、入力装置を目視するのは困難である。したがって、電動歯ブラシに、意図しないタッチによる誤動作を回避するための上述の方法を適用することは困難である。
【0009】
それゆえに、本発明の目的は、接触型センサ部を操作部として備える電動歯ブラシにおいて意図した入力かどうかを区別して動作制御する電動歯ブラシを提供することである。
【課題を解決するための手段】
【0010】
この発明に係る電動歯ブラシは、使用者により一部が把持される本体部と、本体部に交換可能に取付けられるブラシ部と、を備える。
【0011】
本体部は、本体部の把持される部分を除いた部分に配置され、且つ外部からの操作を受付けるための接触型センサ部と、接触型センサ部により受付けた操作に従って電動歯ブラシの動作を制御するための制御部と、を含む。
【0012】
制御部は、接触型センサ部により第1操作を受付けた場合に、一定時間、操作受付け可能である旨を出力し、接触型センサ部により一定時間において受付けた第2操作が所定パターンの操作である場合に、当該第2操作に従って動作を制御する。
【発明の効果】
【0013】
本発明によれば、電動歯ブラシは、外部からの操作を受付けるための接触型センサ部を備え、接触型センサ部を介した操作が意図した入力操作かどうかを区別して動作を制御する。
【図面の簡単な説明】
【0014】
【図1】本実施の形態に係る電動歯ブラシの内部構成例を示す断面図である。
【図2】本実施の形態に係る電動歯ブラシを含むシステムのブロック図である。
【図3】本実施の形態に係るスイッチの構成を説明する図である。
【図4】本実施の形態に係るスイッチと出力部の本体部の筐体における配置例を示す図である。
【図5】本実施の形態に係るスイッチ操作に従う電動歯ブラシ制御のための機能構成図である。
【図6】本実施の形態に係る処理のフローチャートである。
【図7】本実施の形態に係る処理のフローチャートである。
【図8】本実施の形態に係る電極部への接触態様を説明する図である。
【図9】本実施の形態に係る電極部への接触態様を説明する図である。
【図10】本実施の形態に係るスイッチにおける電極の配置例を示す図である。
【図11】本実施の形態に係る筐体の電極に対応する部分の形状を示す図である。
【図12】本実施の形態に係る筐体の電極に対応する部分の形状を示す図である。
【図13】本実施の形態に係る筐体の電極に対応する部分の形状を示す図である。
【図14】本実施の形態に係る筐体の電極に対応する部分の形状を示す図である。
【図15】本実施の形態に係る筐体の電極に対応する部分の形状を示す図である。
【図16】本実施の形態に係る基板に関連付けて電極の配置例を示す図である。
【図17】本実施の形態に係る基板に関連付けて電極の配置例を示す図である。
【図18】本実施の形態に係る基板に関連付けて電極の配置例を示す図である。
【図19】本実施の形態に係る基板に関連付けて電極の配置例を示す図である。
【図20】本実施の形態に係る並列した入力電極の静電容量値の変化に基づく操作種類の検出例を示す図である。
【図21】本実施の形態に係る並列した入力電極の静電容量値の変化に基づく操作種類の検出例を示す図である。
【図22】本実施の形態に係る並列した入力電極の静電容量値の変化に基づく操作種類の検出例を示す図である。
【図23】本実施の形態に係る入力電極を並列させる態様を示す図である。
【図24】本実施の形態に係る入力電極を並列させる他の態様を示す図である。
【図25】本実施の形態に係る電極部に対する被水による影響を防止する機能を説明する図である。
【図26】本実施の形態に係る電極部に対する被水による影響を防止する機能を説明する図である。
【発明を実施するための形態】
【0015】
以下、この発明の実施の形態について図面を参照しながら説明する。なお、各図中、同一符号は同一または相当部分を指す。
【0016】
本実施の形態では、筐体表面に植毛されたブラシを有する電動歯ブラシを説明するが、実施の形態の構成は、口腔ケア(歯の洗浄・ブラッシング・歯茎マッサージなど)に用いることが可能な装置一般に適用することができる。具体的には、口腔ケアに用いる材料としては、歯ブラシに代替してスポンジ、ゴム、エラストマなどの樹脂部品またはブラシとこれら樹脂部品が複合された口腔ケア部材を用いた装置に適用することができる。
【0017】
<構成について>
図1〜図3を参照して、電動歯ブラシの構成を説明する。
【0018】
図1は、電動歯ブラシの内部構成例を示す断面図であり、図2は、電動歯ブラシを含むシステムのブロック図であり、図3は、電動歯ブラシのスイッチSWを周辺部と関連付けて説明するための図である。
【0019】
電動歯ブラシ1は、駆動源であるモータ10を内蔵する本体部2と、モータ10の駆動により振動する振動部材5とを備える。したがって、モータ10の回転数は、電動歯ブラシ本体の振動数に対応する。本体部2は、概ね円柱形状の筐体を有し、筐体の一部は歯を磨く際に使用者が把持する、すなわち手で握るためのハンドル部を兼ねる。
【0020】
さらに、電動歯ブラシ1に関連して、本体部2が載置されて、載置された電動歯ブラシ1を充電するための充電器100と、ブラッシング結果など各種情報を出力するための表示器110とが設けられる。
【0021】
本体部2の筐体には、電源のオン/オフおよび後述のモータ10の動作モードの切替えなどを指示するための外部からの操作を受付けるためのスイッチSWが設けられる。また本体部2は筐体内部において、モータ10(たとえば、直流モータ)、駆動回路12、各部に電力を供給するための定格出力2.4Vの電源である充電池13、充電用のコイル14などを有する。充電池13は、充電器100に本体部2を載置するだけで、電磁誘導により非接触で充電される。駆動回路12は、図示されない基板に搭載された各種演算および制御を実行するCPU(Central Processing Unit)120、プログラムおよび各種設定値が格納されるメモリ121、タイマ122、データ送信部123などを有する。データ送信部123は、表示器110のデータ受信部112との間で無線通信を行なう。表示器110は、データ受信部112で受信したブラッシング結果などのデータを出力するためのディスプレイ111を備える。
【0022】
また、本体部2は、スイッチSWが操作受付け可能である旨を出力するために出力部16を一体的に備える。出力部16は、音声出力部(ブザー、スピーカ)、ライト(LED(Light Emitting Diode)など)などを含む。
【0023】
振動部材5は、本体部2側に固定されているステム部20と、このステム部20に装着されるブラシ部品21とを備える。ブラシ部品21の先端にはブラシ210が植毛されている。ブラシ部品21は消耗部品ゆえ、新品に交換できるよう、ステム部20に対して着脱自在な構成となっている。
【0024】
振動部材5のブラシ部品21は、ブラシ210が配置されたブラシ部、および、本体部2側に位置する柄部を含む。なお、柄部の全てまたは一部は、本体に含まれる構成であってもよい。
【0025】
ステム部20は、樹脂材からなる。ステム部20は、エラストマからなる弾性部材202を介して本体部2に取り付けられている。ステム部20は、先端(ブラシ側の端部)が閉じた筒状の部材であり、筒の内部の先端に軸受203を有している。モータ10の回転軸11に連結された偏心軸30の先端が、ステム部20の軸受203に挿入される。この偏心軸30は、軸受203の近傍に重り300を有しており、偏心軸30の重心はその回転中心からずれている。なお、偏心軸30の先端と軸受203の間には微小なクリアランスが設けられている。
【0026】
動作においては、CPU120は動作モードに応じた駆動信号(たとえばPWM(Pulse Width Modulation)信号)をモータ10に供給することにより、モータ10が回転し、連動して回転軸11が回転する。回転軸11の回転に伴って偏心軸30も回転するが、偏心軸30は重心がずれているために回転中心の回りに旋回するような運動を行なう。よって、偏心軸30の先端の動きが軸受203の内壁に伝わり、ステム部20とそれに装着されたブラシ部品21とを高速に振動(運動)させることができる。
【0027】
使用者は、本体部2をの筐体の一部を把持しながら振動するブラシ210を歯に当てることで、ブラッシングを行なう。
【0028】
図3を参照して、スイッチSWの構成を説明する。スイッチSWは接触型センサであって、スイッチSWは電極部を有する。電動歯ブラシ1は電極部の静電容量値を測定するための静電容量式センサ143を有する。電極部は、ガード電極141および入力電極142を有する。ガード電極141は、入力電極142の周囲に配置される。
【0029】
静電容量式センサ143は後述する操作受付部133の1つの機能として設けられる。動作において、各電極に人体などの導体が接触(タッチ)すると導体と電極との間における静電容量は、静電容量式センサ143によって測定される。その測定値によって、接触の有無が判定される。
【0030】
本実施の形態では、操作の判別精度を高めるために電極部はガード電極141と入力電極142の両方を備えるとしているが、電極部は入力電極142のみからなるとしてもよい。
【0031】
図4には、スイッチSWと出力部16の本体部2の筐体における配置例が示される。本実施の形態では、スイッチSWは本体部2の筐体の歯ブラシ時に把持される部分を除いた部分に配置される。また、出力部16が音声,ライトによる場合には、出力部16も、本体部2の把持される部分を除いた部分に設けられる。
【0032】
図4では、本体部2の柱状筐体の表面において、本体部2と振動部材5との接合側の端部に配置されるので、スイッチSWを操作するには、使用者は歯ブラシ時に本体部2を握る指を意図的に伸ばす必要があり、スイッチSWに対する意図しない接触を回避することができる。また、スイッチSWは本体部2側に設けられるので、操作によって振動部材5の振動が妨げられることはない。
【0033】
図5には、本実施の形態によるスイッチSWの操作に従う電動歯ブラシ制御のための機能構成図である。図5を参照してCPU120は、スイッチSWがタッチされることにより受付けた操作内容に従って電動歯ブラシ1の動作を制御するための制御部130を含む。制御部130は、スイッチSWが操作を受付けた場合に、一定時間、操作受付け可能である旨を出力部16を制御して出力させるための出力制御部134を有する。出力制御部134は、出力部16による音声の出力、またはライトの点滅,点灯などを制御する。
【0034】
ここでは出力制御部134は出力部16の動作を制御するとしているが、モータ10の回転を制御して、ブラシ部品21の振動(運動)モードを変更させるとしてもよい。
【0035】
図5の機能は、CPU120が実行するプログラムと回路の組合せにより提供されるとしているが、プログラムのみ、または回路部品のみにより提供されるとしてもよい。
【0036】
図6と図7には、本実施の形態に係る処理のフローチャートが示される。これらフローチャートは予めプログラムとしてメモリ121に格納されており、CPU120がプログラムをメモリ121から読出し、実行する。図8と図9には、スイッチSWに対する指の接触態様が例示される。
【0037】
図6を参照して、操作受付部133によりスイッチSWに指(導体)が接触したか否かの接触判定が行われる(ステップT1)。制御部130は、判定により“非接触”が出力される場合には(ステップT3でNO)、ステップT1の処理を繰返すが、“接触”が出力される場合には(ステップT3でYES)、処理をステップT5に移行させる。
【0038】
“接触”が出力された場合には、出力制御部134は、出力部16を制御して音声、光などを所定の態様で一定時間出力する(ステップT5)。これにより、使用者に対して一定時間内にスイッチSWを操作すれば操作受付けされることをが報知される。
【0039】
なお、報知態様はこれに限定されず、ステップT5では、制御部130は、電動歯ブラシ1が有する複数種類の動作モードについて、“接触”と判定された第1操作を受付けたときは、操作を受付ける前の動作モードを、一定時間、他の種類の動作モードに切替えることで、報知してもよい。より具体的には、上述のように、モータ10に供給する駆動信号を切替え後の動作モードに応じた周波数に変化させることで、ブラシ部21の振動周波数を変化させて報知する。
【0040】
操作受付部133は、静電容量式センサ143からの上記の一定時間内における出力パターンが、所定パターンに一致するか否かを判定する(ステップT7、ステップT9でNO)。たとえば、静電容量式センサ143の出力が示す入力電極142の静電容量値の変化パターンを検出し、検出した変化パターンと所定操作の変化パターンとを比較し、比較結果に基づき所定操作がされたか否かを判定する。ここでは、所定操作は、1回タップ、2回タップ、スライド操作などを含み、所定操作の判定については後述する。
【0041】
一定時間内に所定操作がされたと判定すると(ステップT7でYES)、操作受付部133が当該所定操作を解析して、解析結果に基づき操作指示を出力する(ステップT11)。これにより、入力判定がされる。つまり、操作受付部133が受付た操作内容に従って電動歯ブラシ1の動作(モータ10の回転数など)を制御するための操作指示が使用者によって入力されたと判定される。
【0042】
一方、一定時間内に所定パターンの操作がされないと判定すると(ステップT7でNO、ステップT9でYES)、操作受付部133による入力判定はされない(ステップT13)。
【0043】
なお、一定時間が経過すると、音声の出力は停止し、ライトは消灯し、動作モードは元の動作モード(切り替え前の動作モード)に戻される。
【0044】
図7を参照して、図6の接触判定処理(ステップT1)について説明する。
まず、操作受付部133は静電容量式センサ143からの出力に含まれるガード電極141の静電容量値と、接触判定のための第1閾値とを比較し、比較結果に基づきガード電極141に導体が接触しているか否かを判定する(ステップS5)。具体的には、比較結果に基づき(静電容量値≦第1閾値)の条件が成立すると判定すると(ステップS5でYES)、後述するステップS7の処理に移行するが、当該条件は成立しないと判定すると(ステップS5でNO)、“非接触”を出力する(ステップS9)。
【0045】
スイッチSWの電極部が入力電極142のみからなる場合には、ステップS5では、入力電極142の静電容量値を用いて判定される。
【0046】
ステップS7では、操作受付部133は静電容量式センサ143からの出力に含まれる入力電極142の静電容量値と、接触判定のための第2閾値とを比較し、比較結果に基づき入力電極142に導体が接触しているか否かを判定する(ステップS7)。具体的には、比較結果に基づき(静電容量値≧第2閾値)の条件が成立すると判定すると(ステップS7でYES)、“接触”を出力する(ステップS11)。条件が成立しないと判定すると(ステップS7でNO)、“非接触”を出力する(ステップS9)。
【0047】
なお、第1および第2閾値は、メモリ121の所定領域に予め格納されていると想定するが、判定基準は測定された静電容量値に限定されず、単位時間あたりの静電容量値の変化値(たとえば、+10pf/sec)であってよく、または、それらを組合わせたものであってもよい。
【0048】
図6および図7の処理によれば、図8の(A)と図9の(A)のように意図的に入力電極142のみに指が接触している場合には、ガード電極141で接触していないと判定されて入力電極142について“接触”と判定されて第1操作が受付けされる。この場合には図6のステップT5以降の入力の判定を行なうにすることで、スイッチSWの意図的な操作(一定時間内の所定パターンによる第2操作)は受付されて、操作内容による電動歯ブラシ1の動作制御が可能となる。一方、図8の(B)と図9の(B)のように意図せずにスイッチSWに指または掌が接触するような場合には、ガード電極141で接触していると判定があっても入力電極142について“非接触”と判定されることになり、図6のステップT5以降の入力判定は行なわなれない。これにより、使用者が意図せずにスイッチSWにタッチした場合などの誤動作を防止できる。
【0049】
<電極の配置について>
実施の形態に係るスイッチSWにおいては、第1電極である入力電極142の周囲に第2電極であるガード電極141が配置される。
【0050】
図10には、スイッチSWにおける電極の配置例が示される。図10の(A)によれば、入力電極142の周囲を、円形状の1個のガード電極141が入力電極142を囲むように配置される。
【0051】
図10の(B)では、並列する複数の入力電極142の周囲を、矩形状の1個のガード電極141が入力電極142を囲むように配置される。上述した第2操作の1種であるスライド操作は、並列配置される入力電極142の列が延びる方向と同一方向に指を滑らせる操作を指す。
【0052】
図10の(B)の矩形状のガード電極141は、図10の(C)に示すように、矩形の各辺に対応してガード電極141を個別に配置するとしてもよい。図10の(C)では、各辺に対応したガード電極141の形状・サイズ(電極面積)は同じであり、また各入力電極142も形状・サイズ(電極面積)は同じとしている。これにより、電極表面における導体の接触面積が同じであれば各電極における静電容量値は一致するから、接触判定が容易となる。
【0053】
<筐体の電極に対応する部分の形状>
歯ブラシ時に本体部2を把持した使用者が、歯ブラシしながら指をスイッチSWに接触させる際に、指の触感で入力電極142とガード電極141を容易に判別できるように、筐体のガード電極141および入力電極142に対応する部分の形状を、図11〜図15に示すように異ならせる。
【0054】
図11〜図15の各図の(A)は、ガード電極141と入力電極142が配置された筐体部分の、本体部2の長手方向に延びる断面形状を模式的に示し、各図の(B)は当該図の(A)に対応した筐体部分の表面を模式的に示す。
【0055】
図11では、筐体表面のガード電極141に対応する部分に樹脂材料により凸部154形成し、図12で凹部145が形成される。これにより、ガード電極141と入力電極142の位置を指で触って判別することができる。
【0056】
筐体の表面においてスイッチSWが設けられる面は曲面であるが、図13のように、スイッチSWが設けられる部分のみを平面146に形成し、その平面146の入力電極142に対応する部分には小さな凸部147を形成する。これにより、スイッチSWの位置と、スイッチSWにおける入力電極142の位置とを指で触って判別することができる。
【0057】
図14では、入力電極142を本体部2の端に配置し、筐体表面の入力電極142が設けられる部分のみ平面148に形成する。平面148は端部で半分となった半円形状を有する。図15では、筐体表面のガード電極141に対応する部分にシボ加工により細かい凸凹模様149Aを形成し、入力電極142に対応する部分は平面149Bに形成する。
【0058】
図14と図15の形状であれば、本体部2の筐体を形成する工程でにおいて、円筒型からそのまま型抜きすればよく、金型および成形にかかるコストを節約することができる。
【0059】
<電極の配置例>
図16〜図19にはスイッチSWの電極の配置例が示される。図16の(A)は、ガード電極141と入力電極142が配置された筐体部分の、本体部2の長手方向に延びる断面形状を模式的に示す。図16の(B)は図16の(A)の基板153上における電極とCPU120間の配線パターンを示す。
【0060】
図16の(A)を参照して、筐体内部に収容されるCPU120など搭載した基板153の主面には、ガード電極141と入力電極142の電極パターンが形成される。基板153は、主面が筐体の内側面と対向するようにして収容される。この場合、電極パターンと筐体との間の空間(距離)に起因して精度よく静電容量を測定することが困難となる。
【0061】
静電容量の測定精度を得るために、図17と図18に他の配置例を示す。図17では、電極パターンを基板153に代替して、筐体内側面に配置する。具体的には、透明電極膜として使用されるITO(Indium Tin Oxide)膜を用いてガード電極141と入力電極142の電極パターンが形成された導電性のシール144を、筐体内側面に貼り付ける。筐体内側面に貼り付けたシール144の一部は延伸し、基板153の主面上の配線パターンと接続される。この場合、電極パターンは直接に筐体内側面に形成されるから、精度よく静電容量を測定することが困難となる。
【0062】
図18では、筐体内部において基板153が導電性のシャーシ150を用いて他の回路部と区分して収納される。基板153の主面はシャーシ150を介在させた状態で筐体内側面と対向する。シャーシ150の筐体内面側と対向する表面上には、ガード電極141と入力電極142の電極パターンが形成された導電性のシール144が貼り付けられる。そして、シャーシ150の裏面(すなわち、基板153の主面と対向する面)に貼付けられたシール144は基板153の主面上の配線パターンと接続される。これにより、ガード電極141と入力電極142は、シール144およびシャーシ150を介して基板153上の配線パターンと電気的に導通可能となる。
【0063】
図19には、図17と図18において、ガード電極141と入力電極142の電極パターンが形成されたシール144を用いて、電極(ガード電極141,入力電極142)と基板153の主面上のCPU120との間を電気的に導通させるための配線パターンが例示される。
【0064】
<操作のパターン検出>
図20〜図22には、並列した各入力電極142の静電容量値の変化に基づき、第2操作の種類である操作パターンを検出する例が示される。各図では、上段に1列に並んだ入力電極142の列が模式的に示され、下段には静電容量値のグラフが示される。グラフの横軸には、上段の各入力電極142に対応して当該電極の列における位置がとられ、縦軸には測定される静電容量値が示される。
【0065】
操作受付部133は、静電容量式センサ143からの出力に基づき、スイッチSWの並列した各入力電極142の静電容量値の変化パターンに基づき、操作の種類を検出する。検出動作を、図20〜図22を参照し説明する。
【0066】
なお、ここでは、各入力電極142と静電容量式センサ143との間には個別に配線パターンが形成されて、静電容量式センサ143は各配線について当該配線が接続される入力ポートを有する。したがって、静電容量式センサ143は入力ポートの電位の変化に基づきポート番号を判別する。ポート番号を判別することにより、対応する入力電極142の列における位置を一意に判別する。
【0067】
まず、図20を参照して、入力電極142の列において操作された位置を検出する場合を説明する。
【0068】
図20の(A)では、1列に並んだ入力電極142のいずれも測定される静電容量値は上述の第2閾値(グラフ中の破線の値)未満であることから入力判定はされないが、図20の(B)のように1列に並んだ入力電極142の1つについて静電容量値が第2閾値以上である場合には、入力判定がされる。この入力判定では、静電容量式センサ143は各入力ポートの番号と当該ポートを介して測定した静電容量値を出力する。したがって、操作受付部133は、第2閾値以上である静電容量値が測定されたポート番号を判別する。判別した同一ポート番号の入力ポートの静電容量値の時間的変化パターンに基づき、当該変化パターンは1回タップまたは2回タップのパターンであるか否かを判別する。
【0069】
これに対し、図20の(C)のように、被水などして1列に並んだ入力電極142の複数個について静電容量値が第2閾値以上となるような場合には、入力判定はされない。
【0070】
これにより、入力電極142の列における1回タップまたは2回タップに応じた操作指示を生成し、生成した操作指示に従って、電動歯ブラシ1の動作を制御することができる。
【0071】
なお、1回のタップ操作と2回のタップ操作は次のように判別する。つまり、一定時間内に1回目のタップが検出されると、第2操作は“1回タップ操作”であると判定し、1回目のタップ操作後の所定時間内に2回目のタップ操作が判定されると、第2操作は“2回タップ操作”であると判定し直す。なお、1回目のタップが一定時間内の終了直前でなされた場合には2回目タップは一定時間外で検出されることになるが、本実施の形態では、この場合でも第2操作は“2回タップ操作”と判定する。つまり、1回目のタップが一定時間内に検出され、且つ2回目タップが1回目タップ後から所定時間内に検出されれば“2回のタップ操作”と判定する。
【0072】
次に、図21を参照して、スライド操作について説明する。入力電極142の列における指のスライド移動の速度に基づきスライド操作を検出する。
【0073】
図21の(A)では、図20の(A)と同様に入力判定はされないケースが示される。図21の(B)〜(D)では、スライド操作による指の移動に連動した、静電容量値のピーク値の移動が示される。スライド操作がされると、静電容量値の変化については必ず隣接した入力電極142間で静電容量値のピーク値が移動し、且つピーク値の移動速度は一定以上となる。
【0074】
操作受付部133は、ピーク値が測定されるポート番号の変化速度を検出し、検出した移動速度が一定速度以上であると判定すると、スライド操作されたと判定し、スライド操作に対応した操作指示を出力する。
【0075】
ここでは、列の各入力電極142に対応したポート番号の数値は、当該列の入力電極142の並びに対応して順次に増加する(たとえば、1,2,3,4,5・・・と昇順に増加する)と想定する。したがって、ピーク値が測定されるポート番号を表す数値の単位時間当たりの増加量に基づき、単位時間当たりの移動量(距離)を算出し、ピーク値の移動速度を算出することができる。移動速度が一定速度以上であると判定すると、スライド操作されたと判定する。
【0076】
なお、同じスライド操作であっても、そのピーク値の移動速度に応じて、動作モードを切替える操作指示の種類を異ならせる、または、同じスライド操作であっても、そのピーク値の移動方向に応じて、動作モードを切替える操作指示の種類を異ならせる、または移動速度と方向の組合わせで操作指示の種類を異ならせるようにしてよい。
【0077】
また、図22に示すように、入力電極142の列が被水した場合であっても、ピーク値移動速度の検出は可能である。つまり、電動歯ブラシ1は洗面所など被水しやすい環境で使用するために、スイッチSWが被水し易い。たとえば、図22の(A)〜(D)のように、入力電極142の列に水がかかる場合がある。この場合であっても、入力電極142にかかる水よりも接触する指の方が体積が大きいために、測定される静電容量値は水より指の方が大きくなり、指の接触による静電容量値のピーク値検出が可能となる。ピーク値が検出できることから操作位置の検出が可能であり、ピーク値の移動速度も測定できる。したがって、スライド操作の有無も判定することができる。
【0078】
入力電極142を1列に並列させる態様としては、たとえば、図23のように本体部2の矢印の長手方向と同一方行に1列に並列させる態様、図24のように長手方向と交差(直交を含む)する方向に延びるように本体部2の円柱に周囲に沿って1列に並列させる態様とがある。
【0079】
<被水の影響を防止する機能>
図25と図26を参照して、本実施の形態におけるスイッチSWの電極部に対する被水による影響を防止する機能を説明する。
【0080】
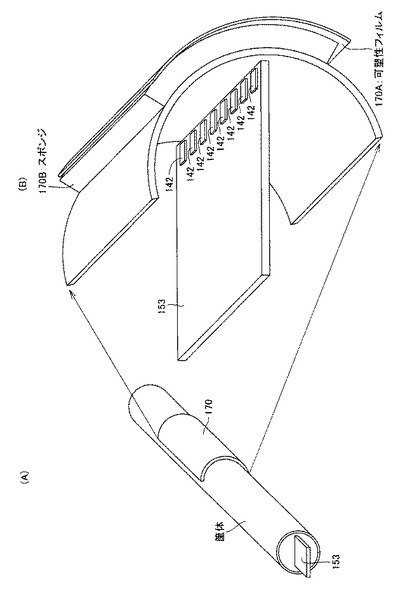
図25の(A)には、本体部2の筐体表面にスイッチSWが配置される部分を被覆部材170で覆った状態が示され、図25の(B)には被覆部材170で覆った部分を、本体部2の長手方向と直交する方向に沿った断面が示される。電極部は、図16の(A)に示すように筐体と近接するよに基板153の筐体内面に近い端部に配置される。
【0081】
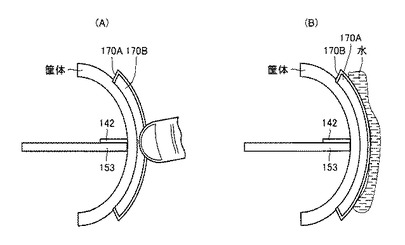
スイッチSWの電極部に対し被水があったとしても、静電容量の測定精度を維持できるようにガード電極141,入力電極142を含む電極部を可塑性(変形させていた外力を取り除くと元の形に戻ってしまう性質)の樹脂材料、たとえばスポンジ170Bとフィルム170Aとで覆う。これにより水が掛かっても水と電極部の距離がスポンジ170Bの厚み分だけ大きくなるため、静電容量の変化を小さくでき被水の影響を小さくすることができる(図26の(B)参照)。
【0082】
水の場合はスポンジ170Bを潰すほどの押圧力は生じないが、指の場合は押圧力によってスポンジ170Bは潰される(圧縮される)。そのためスポンジ170Bが介在するとしても指と筐体内部の基板153上の電極部との距離を接近させることができ操作の種類を判別するための静電容量値を測定できる(図26の(A)参照)。
【0083】
また、被水の影響をさらに小さくするために、可塑性のフィルム170Aに撥水性を付与するようにしてもよい。
【0084】
このように、本実施の形態に係る電動歯ブラシ1は、使用者により一部が把持される本体部2と、本体部に交換可能に取付けられるブラシ部品21と、を備え、本体部2は、本体部2の把持される部分を除いた部分に配置され、且つ外部からの操作を受付けるためのスイッチSWの接触型センサ部と、接触型センサ部により受付けた操作に従って電動歯ブラシ1の動作を制御するための制御部130と、を含む。制御部130は、接触型センサ部によって第1操作を受付けた場合に、一定時間、操作受付け可能である旨を出力する。そして、一定時間において受付けた第2操作が所定パターンの操作である場合に、当該第2操作に従って電動歯ブラシ1の動作を制御する。
【0085】
今回開示された実施の形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上記した説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。
【符号の説明】
【0086】
1 電動歯ブラシ、2 本体部、10 モータ、16 出力部、21 ブラシ部品、130 制御部、133 操作受付部、134 出力制御部、141 ガード電極、142 入力電極、143 静電容量式センサ、144 シール、145 凹部、146,148,149B 平面、147,154 凸部、149A 凸凹模様、150 シャーシ、153 基板、170 被覆部材、170A フィルム、170B スポンジ、SW スイッチ。
【特許請求の範囲】
【請求項1】
電動歯ブラシであって、
使用者により一部が把持される本体部と、
前記本体部に交換可能に取付けられるブラシ部と、を備え、
前記本体部は、
前記本体部の把持される部分を除いた部分に配置され、且つ外部からの操作を受付けるための接触型センサ部と、
前記接触型センサ部により受付けた操作に従って前記電動歯ブラシの動作を制御するための制御部と、を含み、
前記制御部は、
前記接触型センサ部により第1操作を受付けた場合に、一定時間、操作受付け可能である旨を出力し、
前記接触型センサ部により前記一定時間において受付けた第2操作が所定パターンの操作である場合に、当該第2操作に従って前記動作を制御する、電動歯ブラシ。
【請求項2】
前記本体部は、柱状の形状を有し、
前記把持される部分を除いた部分は、前記本体部の柱状の長手方向の端部である、請求項1に記載の電動歯ブラシ。
【請求項3】
前記所定パターンの操作は、異なる種類の操作を含み、
前記制御部は、
前記接触型センサ部によって前記一定時間において受付け第2操作の種類を判別し、判別した操作の種類に従って前記動作を制御する、請求項1または2に記載の電動歯ブラシ。
【請求項4】
前記電動歯ブラシは複数種類の動作モードを有し、
前記制御部は、
前記第1操作を受付けたとき、動作モードを切替えることで操作受付け可能である旨を出力する、請求項1から3のいずれかに記載の電動歯ブラシ。
【請求項5】
前記所定パターンの操作には、スライド操作が含まれ、
前記制御部は、操作受付部を含み、
前記操作受付部は、
前記接触型センサ部の出力の変化パターンに基づき、前記一定時間において受付けた前記第2操作が所定パターンの操作であるか否かを判定する、請求項1から4のいずれかに記載の電動歯ブラシ。
【請求項6】
前記接触型センサ部は、電極部を含み、
前記操作受付部は、
前記電極部の静電容量値を測定する静電容量センサを含み、
前記静電容量センサによって測定される静電容量値と第1閾値とを比較し、比較結果に基づき、外部からの操作は前記第1操作であるか否かを判定する、請求項5に記載の電動歯ブラシ。
【請求項7】
前記操作受付部は、
前記静電容量センサによって測定される前記電極部の静電容量値と第2閾値とを比較し、比較結果に基づき、外部からの操作は前記第2操作であるか否かを判定する、請求項6に記載の電動歯ブラシ。
【請求項8】
前記電極部は入力電極と、前記入力電極の周囲に配置されるガード電極とを含み、
前記入力電極は、1列に並列した複数の電極であって、
前記第2操作は、前記並列した複数の電極それぞれについて測定される静電容量値の時間的な変化パターンを指す、請求項7に記載の電動歯ブラシ。
【請求項9】
前記接触型センサ部は、前記本体部の筐体の内部に収容され、
前記筐体の外部表面のうち、筐体内部に配置された前記電極部に対応する部分において、当該部分を覆う可塑性部材からなる被覆部を有する、請求項6から8のいずれかに記載の電動歯ブラシ。
【請求項1】
電動歯ブラシであって、
使用者により一部が把持される本体部と、
前記本体部に交換可能に取付けられるブラシ部と、を備え、
前記本体部は、
前記本体部の把持される部分を除いた部分に配置され、且つ外部からの操作を受付けるための接触型センサ部と、
前記接触型センサ部により受付けた操作に従って前記電動歯ブラシの動作を制御するための制御部と、を含み、
前記制御部は、
前記接触型センサ部により第1操作を受付けた場合に、一定時間、操作受付け可能である旨を出力し、
前記接触型センサ部により前記一定時間において受付けた第2操作が所定パターンの操作である場合に、当該第2操作に従って前記動作を制御する、電動歯ブラシ。
【請求項2】
前記本体部は、柱状の形状を有し、
前記把持される部分を除いた部分は、前記本体部の柱状の長手方向の端部である、請求項1に記載の電動歯ブラシ。
【請求項3】
前記所定パターンの操作は、異なる種類の操作を含み、
前記制御部は、
前記接触型センサ部によって前記一定時間において受付け第2操作の種類を判別し、判別した操作の種類に従って前記動作を制御する、請求項1または2に記載の電動歯ブラシ。
【請求項4】
前記電動歯ブラシは複数種類の動作モードを有し、
前記制御部は、
前記第1操作を受付けたとき、動作モードを切替えることで操作受付け可能である旨を出力する、請求項1から3のいずれかに記載の電動歯ブラシ。
【請求項5】
前記所定パターンの操作には、スライド操作が含まれ、
前記制御部は、操作受付部を含み、
前記操作受付部は、
前記接触型センサ部の出力の変化パターンに基づき、前記一定時間において受付けた前記第2操作が所定パターンの操作であるか否かを判定する、請求項1から4のいずれかに記載の電動歯ブラシ。
【請求項6】
前記接触型センサ部は、電極部を含み、
前記操作受付部は、
前記電極部の静電容量値を測定する静電容量センサを含み、
前記静電容量センサによって測定される静電容量値と第1閾値とを比較し、比較結果に基づき、外部からの操作は前記第1操作であるか否かを判定する、請求項5に記載の電動歯ブラシ。
【請求項7】
前記操作受付部は、
前記静電容量センサによって測定される前記電極部の静電容量値と第2閾値とを比較し、比較結果に基づき、外部からの操作は前記第2操作であるか否かを判定する、請求項6に記載の電動歯ブラシ。
【請求項8】
前記電極部は入力電極と、前記入力電極の周囲に配置されるガード電極とを含み、
前記入力電極は、1列に並列した複数の電極であって、
前記第2操作は、前記並列した複数の電極それぞれについて測定される静電容量値の時間的な変化パターンを指す、請求項7に記載の電動歯ブラシ。
【請求項9】
前記接触型センサ部は、前記本体部の筐体の内部に収容され、
前記筐体の外部表面のうち、筐体内部に配置された前記電極部に対応する部分において、当該部分を覆う可塑性部材からなる被覆部を有する、請求項6から8のいずれかに記載の電動歯ブラシ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【公開番号】特開2013−34636(P2013−34636A)
【公開日】平成25年2月21日(2013.2.21)
【国際特許分類】
【出願番号】特願2011−172623(P2011−172623)
【出願日】平成23年8月8日(2011.8.8)
【出願人】(503246015)オムロンヘルスケア株式会社 (584)
【Fターム(参考)】
【公開日】平成25年2月21日(2013.2.21)
【国際特許分類】
【出願日】平成23年8月8日(2011.8.8)
【出願人】(503246015)オムロンヘルスケア株式会社 (584)
【Fターム(参考)】
[ Back to top ]