
電動車両の充電制御システム
【課題】太陽電池を搭載した電動車両における、バッテリに対する外部電源からの充電量を必要最小限に抑えることができ、充電コスト及び充電時間の節約を図る。
【解決手段】ユーザが遠隔操作デバイス26を操作して翌日の走行予定データを入力すると、制御装置2は、走行経路を算出し、必要と予測されるバッテリ3の必要電力量を計算する。制御装置2は、外部ネットワーク20からその走行時間帯における走行経路付近の天候情報及び信頼度を取得し、太陽電池5の発電電力量を予測する。制御装置2は、バッテリ3の残存電力量及び太陽電池5の発電電力量から、バッテリ3の必要電力量を得るために要する充電電力量を求め、例えば夜間電力を用いてバッテリ3に対する充電を実行させる。制御装置2は、実際の電動車両の走行時において、必要電力量及び発電電力量に関して変動がないかどうかを常に監視する。
【解決手段】ユーザが遠隔操作デバイス26を操作して翌日の走行予定データを入力すると、制御装置2は、走行経路を算出し、必要と予測されるバッテリ3の必要電力量を計算する。制御装置2は、外部ネットワーク20からその走行時間帯における走行経路付近の天候情報及び信頼度を取得し、太陽電池5の発電電力量を予測する。制御装置2は、バッテリ3の残存電力量及び太陽電池5の発電電力量から、バッテリ3の必要電力量を得るために要する充電電力量を求め、例えば夜間電力を用いてバッテリ3に対する充電を実行させる。制御装置2は、実際の電動車両の走行時において、必要電力量及び発電電力量に関して変動がないかどうかを常に監視する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、走行用モータと、充電可能なバッテリと、太陽電池とを備える電動車両における、前記バッテリの充電を制御する電動車両の充電制御システムに関する。
【背景技術】
【0002】
近年、環境・エネルギ問題の解決に寄与するものとして、バッテリ(二次電池)を電源として駆動する走行用モータを備えた電気自動車や、いわゆるプラグインタイプのハイブリッド車(電動車両と総称する)の普及が進んできている。これら電動車両は、外部電源によるバッテリの充電が可能に構成され、例えば充電設備を備えた充電ステーションや駐車場等でバッテリの充電を行うことは勿論、家庭用電源を用いて自宅でバッテリの充電を行うことも可能とされている。
【0003】
家庭用電源を用いて自宅でバッテリの充電を行う場合、電力料金の安い深夜電力を用いて充電することが望ましい。そこで、従来では、ユーザが充電開始時刻を設定できる、即ち、充電予約を可能としたものが考えられている(例えば特許文献1参照)。これによれば、例えば翌日の電動車両の走行に備えて、前日の夜間等に、安価な深夜電力でバッテリの充電を行うことができる。
【0004】
尚、ハイブリッド車においては、例えば車両の屋根部分に、太陽光エネルギを電力に変換する太陽電池(太陽光発電パネル)を搭載して、太陽電池の発電電力をバッテリに充電できるようにすることも考えられている(例えば特許文献2参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2009−60728号公報
【特許文献2】特開2000−125407号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、上記特許文献1においては、予約された時刻にバッテリに対する充電を開始した後、バッテリの電力量が所定値(満充電の80%)に達したときに、自動で充電を終了させるようにしている。ところが、そのように、常に一定電力量に達するまでバッテリの充電を行うものでは、必ずしも適切な充電が行えるとは限らず、例えばコスト面や充電時間の面で、必要量を越えて余分な充電を行ってしまうこともあり得る。特に、特許文献2に示されたような太陽電池を搭載した電動車両では、昼間の走行時の太陽電池による発電電力をバッテリの充電に利用することを考慮すれば、その分、外部電力によるバッテリの充電量を少なく済ませることができるものと考えられる。
【0007】
本発明は上記事情に鑑みてなされたもので、その目的は、太陽電池を搭載した電動車両における走行用モータの電源となるバッテリを充電するに際し、前記バッテリに対する外部電源からの充電量を必要最小限に抑えることができ、充電コスト及び充電時間の節約を図ることが可能な電動車両の充電制御システムを提供するにある。
【課題を解決するための手段】
【0008】
上記目的を達成するために、本発明の電動車両の充電制御システムは、走行用モータと、この走行用モータの電源となる充電可能なバッテリと、走行中における発電が可能な太陽電池とを備える電動車両における、前記バッテリに対する外部電源による充電及び前記太陽電池の発電電力による充電を制御するものであって、ユーザが入力した前記電動車両を走行させる予定の日時及び目的地を含んだ走行予定データを取得する走行予定取得手段と、前記走行予定データにおける目的地までの走行経路を取得する経路情報取得手段と、前記走行経路を走行する際に必要と予測される前記バッテリの必要電力量aを計算する必要電力計算手段と、前記走行予定データの走行時間帯における前記走行経路付近の天候情報を取得する天候情報取得手段と、前記走行時間帯に前記走行経路を走行した際の前記太陽電池の発電電力量bを前記天候情報に応じた発電効率を用いて予測する発電量予測手段と、前記バッテリの残存電力量c及び前記太陽電池の発電電力量bから前記バッテリの必要電力量aを得るために要する充電電力量dを求め前記走行予定の日時に至る前までに前記外部電源から充電させる充電実行手段とを備えるところに特徴を有する(請求項1の発明)。
【0009】
上記構成によれば、車載操作装置や、パソコン、携帯端末等を用いてユーザが入力した翌日或いは翌日以降の走行予定データが、走行予定取得手段により取得されると、経路情報取得手段により、目的地までの走行経路が得られる。目的地までの走行経路が得られたならば、必要電力計算手段により、その走行経路を走行する際に必要と予測されるバッテリの必要電力量aを計算することができる。更に、天候情報取得手段により、走行予定の時間帯における走行経路付近の天候情報が取得され、発電量予測手段により、前記時間帯に走行経路を走行した際の太陽電池の発電電力量bを、前記天候情報に応じた発電効率を用いて予測することができる。
【0010】
そして、充電実行手段により、バッテリの残存電力量c及び前記発電電力量bから、前記必要電力量aを得るために要する充電電力量dが求められ、走行予定の日時に至る前までに外部電源からバッテリに対する充電が行われる。従って、この場合、バッテリに対し、太陽電池の発電による充電電力量を考慮した、外部電源からの必要最小限の充電を実行すれば済むので、充電コスト及び充電時間の節約を図ることができる。このとき、予定する走行経路が判明していることにより、必要電力量aの予測を、十分な確かさで行うことができると共に、天候情報を用いることにより、太陽電池の発電電力量bの予測を、現実に即して、十分な確かさで行うことができる。
【0011】
本発明においては、前記天候情報取得手段を、前記天候情報と共に当該天候情報の信頼度を取得するように構成すると共に、前記発電量予測手段を、前記太陽電池の発電電力量bを、前記天候情報の信頼度を考慮して予測するように構成することができる(請求項2の発明)。これにより、予想された天候と実際の天候とが異なっていた場合における、太陽電池の予測した発電電力量bと実際の発電電力量との誤差を小さくして、より堅実性の高い予測を行うことができる。
【0012】
ところで、バッテリの電力は、走行に要する(走行用モータの駆動に係る)ものだけではなく、他の車載機器例えばカーエアコンやカーオーディオ等においても、消費される。この場合、ユーザの嗜好に応じて車載機器の電力消費量は変動する。本発明においては、前記必要電力計算手段を、ユーザが嗜好する車載機器の使用態様に基づき、当該車載機器において消費すると予測されるバッテリの電力を加味して、バッテリの必要電力量aを計算するように構成することができる(請求項3の発明)。これによれば、バッテリの必要電力量aの計算を、より緻密に行うことができる。
【0013】
また、上記のような走行予定に基づく必要電力量a及び発電電力量bの予測については、十分な確かさで予測できるとは言うものの、実際の走行時にあって、走行経路において渋滞が発生していたり、天候の予期しない変動があったりして、予測と実際とが一致しなくなる虞がある。
【0014】
そこで、本発明においては、前記走行予定に基づく実際の電動車両の走行時において、前記必要電力量aの予測及び前記発電電力量bの予測の一方又は双方に関して変動がないかどうかを常に監視する監視手段を設けることができる(請求項4の発明)。これによれば、実際の電動車両の走行時において、監視手段により、実際のバッテリの必要電力量a及び/又は太陽電池の発電電力量bが、予測からどの程度変動しているかを監視することができる。
【0015】
より具体的には、前記監視手段を、前記走行経路の実際の渋滞情報に基づいて、前記バッテリの必要電力量aを再計算する、及び/又は、前記走行経路に沿う実際の天候情報に基づいて、前記太陽電池の発電電力量bを再計算するように構成することができる(請求項5の発明)。これにより、より実情に即したバッテリの必要電力量a及び/又は太陽電池の発電電力量bの監視を行うことができる。
【0016】
このとき、前記走行経路を先行する他車両からのプローブ情報を取得するプローブ情報取得手段を設け、前記監視手段を、前記プローブ情報に基づいて、前記走行経路の実際の渋滞情報及び/又は前記走行経路に沿う実際の天候情報を補完するように構成しても良い(請求項6の発明)。これによれば、バッテリの必要電力量a及び/又は太陽電池の発電電力量bの計算をより緻密に行うことができる。
【0017】
更に、前記走行予定に基づく実際の電動車両の走行時において、目的地に到達するまでに前記バッテリの電力量が不足するかどうかを判断する判断手段と、この判断手段が電力量の不足が発生すると判断したときに、ユーザに対して車載機器の電力消費量を抑えるような調整操作を促す報知手段とを設けることができる(請求項7の発明)。報知手段による報知を受けてユーザが車載機器を調整することにより、その後のバッテリの電力消費を少なく抑えることができ、バッテリの電力量が不足してしまうといった事態を回避することが可能となる。
【0018】
或いは、前記走行経路に沿う或いは近傍の充電可能な充電設備を探索する充電設備探索手段と、前記走行予定に基づく実際の電動車両の走行時において、目的地に到達するまでに前記バッテリの電力量が不足するかどうかを判断する判断手段と、この判断手段が電力量の不足が発生すると判断したときに、前記充電設備探索手段により探索された充電設備に向うように案内する案内手段とを設けることができる(請求項8の発明)。これにより、目的地までの走行途中にバッテリの電力量が不足してしまう虞がある場合には、ユーザは容易に充電設備に立ち寄って自車の充電を行うことができるので、バッテリ切れといった不測の事態に備えることができる。
【図面の簡単な説明】
【0019】
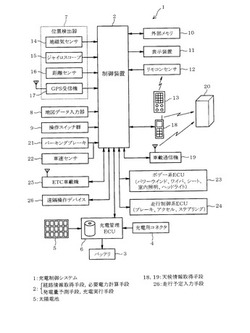
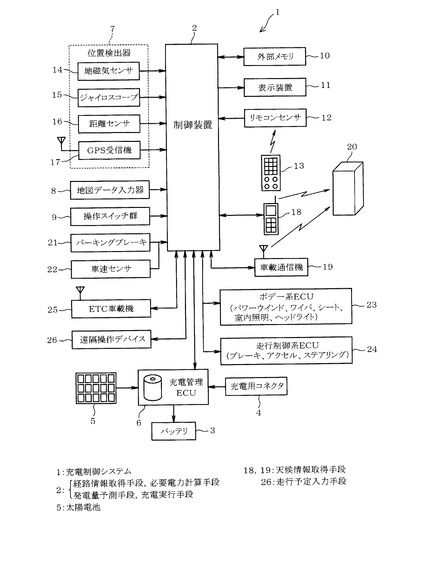
【図1】本発明の第1の実施例を示すもので、充電制御システムの電気的構成を概略的に示すブロック図
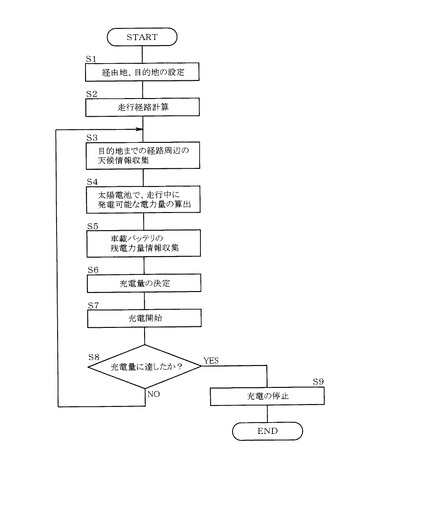
【図2】制御装置の実行する充電予約時における処理手順を示すフローチャート
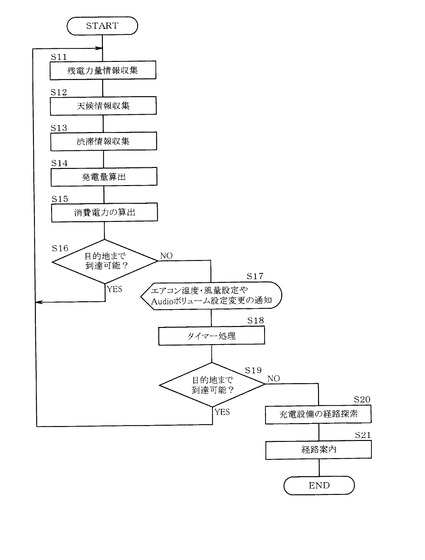
【図3】制御装置の実行する走行時における処理手順を示すフローチャート
【図4】本発明の第2の実施例を示す図3相当図
【発明を実施するための形態】
【0020】
以下、本発明を電気自動車に適用した第1の実施例について、図1ないし図3を参照しながら説明する。図1は、電気自動車に搭載される本実施例に係る充電制御システム1の全体構成を概略的に示している。本実施例では、充電制御システム1は、車載ナビゲーションシステムを含んで(兼用して)構成されており、システム全体を制御する制御装置2を共用化した形態で備えている。この制御装置2は、CPU、ROM、RAM、I/O、それらを相互に接続するバスラインを含むコンピュータを主体として構成され、後述するように、ナビゲーションやバッテリの充電制御に関する各種処理を実行する。
【0021】
ここで、詳しく図示はしないが、電動車両としての電気自動車は、車輪を回転駆動する動力源として走行用モータを備えると共に、その走行用モータの電源となる例えばリチウムイオン二次電池等のバッテリ3を備えている。尚、本発明における「バッテリ」とは、繰返しの充放電が可能なキャパシタも含む概念である。また、電気自動車には、他にもカーエアコンやカーオーディオ等の車載機器が設けられ、前記バッテリ3は、それら他の車載機器の電源となる。
【0022】
このとき、図1に一部に示すように、電気自動車のボディの例えば側壁には、充電コネクタ4(充電口)が設けられている。この充電コネクタ4には、充電用ケーブルを介して外部電源である充電設備が着脱自在に接続される。前記充電設備としては、例えば家庭用電源コンセントや、充電ステーションや駐車場等に設けられた外部充電設備等があり、ユーザは、自宅でバッテリ3の充電を行ったり、公共の外部充電設備でバッテリ3の充電を行ったりすることができる。
【0023】
そして、これも図1にのみ示すように、電気自動車のボディの屋根部分には、太陽電池(太陽光発電パネル)5が搭載されている。この太陽電池5は、周知のように、太陽光等の光エネルギを電気エネルギに変換するものであり、照射された光エネルギ量に応じた電力を発電する。本実施例では、後述するように、太陽電池5の発電電力により、前記バッテリ3に対する充電を行うことが可能に構成されている。充電制御システム1には、前記バッテリ3に対する充電を制御(実行)する充電管理ECU6が設けられる。
【0024】
図1に示すように、充電制御システム(車載ナビゲーションシステム)1の制御装置2には、自車の位置を検出するための自車位置検出手段としての位置検出器7、地図データを入力する地図データ入力器8、操作スイッチ群9、例えばハードディスク装置等の外部メモリ10、例えばフルカラー液晶ディスプレイからなる表示装置11、リモコンセンサ12が接続されている。前記リモコンセンサ12は、リモートコントロール端末13(以下「リモコン端末13」という)からの信号を受信する。
【0025】
前記位置検出器7は、いずれも周知の、地磁気センサ14、ジャイロスコープ15、距離センサ16、並びに、GPS用の人工衛星からの送信電波に基づいて自車の位置を検出(測位)するGPS(Global Positioning System )のためのGPS受信機17を含んでいる。前記制御装置2は、前記位置検出器7を構成する各センサ14〜17からの入力に基づいて、自車の現在位置(絶対位置)、進行方向、速度や走行距離、現在時刻等を高精度で検出する。尚、位置検出器7としては、精度によっては、上述のうちの一部で構成しても良く、更に、ステアリングの回転センサ、各転動輪の車輪センサ等を用いても良い。
【0026】
前記地図データ入力器8は、位置検出の精度向上のためのいわゆるマップマッチング用データ、地図データ及び目印データを含む各種データを入力する。媒体としては、そのデータ量からDVD−ROM(又はCD−ROM)を用いるのが一般的であるが、ハードディスクやメモリカード等の媒体を用いても良い。前記表示装置11の画面には、位置検出器7により検出された車両の現在位置と、地図データ入力器8から入力された地図データと、さらに誘導経路などの付加データとを重ねて表示することができる。
【0027】
前記地図データは、例えば日本全土の地図上の道路を線で表現した道路ネットワークからなり、交差点、分岐点等をノードとして複数の部分に分割し、各ノード間の部分をリンクとして規定したリンクデータとして与えられる。このリンクデータは、リンク固有のリンクID(識別子)、リンク長、リンクの始点,終点(ノード)の位置データ(経度,緯度)、角度(方向)データ、道路幅、道路種別などのデータを含んで構成される。
【0028】
前記操作スイッチ群9は、表示装置11の画面上に設けられたタッチパネルや表示装置11の周囲に設けられたメカスイッチを含んでおり、ユーザは、目的地の設定などの各種の入力や選択設定を行うことができる。前記リモコン端末13の操作によっても、同様に目的地の設定などを行うことができる。制御装置2は、経路探索、案内プログラムの実行により、出発地(現在地)から、例えばユーザの操作スイッチ群9等の操作によって設定された目的地までの推奨する経路を演算により求め、その推奨する経路を案内するルートガイダンス機能を実行する。従って、本実施例では、制御装置2が経路情報取得手段として機能する。
【0029】
上記した経路探索には、例えば、周知のダイクストラ法が用いられ、地図データ入力器8により入力される地図データ(リンク、ノードのデータ)を用いて、出発地(現在地)から目的地へ向けて、次に到達できる交差点(ノード)までの道路(リンク)の探索及びそのコスト(評価値)の計算を順次行っていき、目的地までが最小コストとなるつながったルート(リンク列)を求めることにより行われる。また、この経路探索において、外部から通信により得られた道路交通情報や気象情報等を加味することもできる。経路案内は、周知のように、表示装置11の画面に、道路地図上の走行すべきルートを例えば他の道路と異なる色で表示すると共に、自車の現在位置が所定のポイントに至ったときに、図示しない音声出力装置により案内音声を出力することによって行われる。
【0030】
そして、前記制御装置2には、外部との間で無線通信を行うための携帯電話機18や車載通信機19が接続され、これらにより、外部ネットワーク20(インターネットや専用の情報センタ)との接続が可能とされている。このとき、例えば、道路交通情報センタから提供される最新の道路交通情報(渋滞、事故、工事、車線規制、交通規制などの情報)を受信したり、気象庁から提供される最新の気象情報(天候、風向き等)を受信したりすることが可能とされている。本実施例では、後述するように、制御装置2は外部ネットワーク20を介して、予定される走行時間帯における自車の走行経路付近の天候情報並びにその天候情報の信頼度を取得するようになっており、従って、携帯電話機18及び車載通信機19が、天候情報取得手段として機能する。
【0031】
また、前記制御装置2には、パーキングブレーキ21や車速センサ22からの信号も入力されるようになっている。さらに、制御装置2は、例えばCAN(Controller Area Network)等の図示しない車内LANを介して、ボデー系EUC23や走行制御系ECU24、ETC車載器25、遠隔操作デバイス26、前記充電管理ECU6と相互に接続されている。前記遠隔操作デバイス26は、ナビゲーションや他の車載機器に対する各種の入力や設定操作、バッテリ3に対する外部電源による充電の指示(予約)等を行うためのものであり、例えば運転席の側部(センターコンソール部分)に設けられ、ジョイスティックや複数個の操作スイッチを備えて構成されている。
【0032】
さて、本実施例では、前記制御装置2は、充電管理ECU6を介してバッテリ3に対する外部電源による充電を実行、制御する。また、充電管理ECU6は、バッテリ3に対する太陽電池5の発電電力による充電を実行する。尚、充電管理ECU6は、バッテリ3の出力電圧や出力電流などを監視して残存容量(SOC)を常時検出し、例えばメータ部の所定欄に表示するように構成されている。
【0033】
上記のように、ユーザは、前記遠隔操作デバイス26を操作することにより、バッテリ3の充電に関する指示入力を行うことができる。この場合、前記バッテリ3に対するリアルタイムでの充電実行(開始)や停止(終了)を指示することができることは勿論、バッテリ3の充電予約(充電開始(終了)時刻の指定)を行うことができる。これにより、ユーザの自宅で家庭用電源からバッテリ3を充電する場合、安価な深夜電力を用いて充電するよう、予約を行うことができる。この際、ユーザが、例えば前日において、翌日の行き先や出発時刻(時間帯)が判っている場合には、その走行予定データを入力することによって、制御装置2は次のような制御を行う。
【0034】
即ち、後の作用説明(フローチャート説明)でも述べるように、ユーザが、遠隔操作デバイス26を操作して、走行予定の日時及び目的地からなる走行予定データを入力すると、まず、制御装置2は、その走行予定データを取得して出発地(自宅)から目的地までの推奨する走行経路を算出(取得)する。これと共に、制御装置2は、その走行経路を走行する際に必要と予測されるバッテリ3の必要電力量aを計算する。そして、制御装置2は、外部ネットワーク20から前記走行予定データの走行時間帯における走行経路付近の天候情報(及び信頼度)を取得し、その走行時間帯に走行経路を走行した際の太陽電池5の発電電力量bを、前記天候情報(及び信頼度)に応じた発電効率を用いて予測する。
【0035】
この後、制御装置2は、バッテリ3の残存電力量c及び太陽電池5の発電電力量bから、前記バッテリ3の必要電力量aを得るために要する充電電力量dを求め、充電管理ECU6により走行予定の日時に至る前までにバッテリ3に対するその充電電力量dの充電を実行させる。
【0036】
従って、前記遠隔操作デバイス26が走行予定データを入力する手段として機能する。また、制御装置2は、走行予定取得手段、経路情報取得手段、必要電力計算手段、発電量予測手段として機能すると共に、携帯電話機18及び車載通信機19と共に天候情報取得手段として機能する。さらに、制御装置2は、充電管理ECU6と共に充電実行手段として機能する。尚、ユーザが走行予定データを入力する手段としては、遠隔操作デバイス26に限らず、他の車載操作装置や、外部のパソコンや携帯端末(携帯電話機18)を用いるようにしても良い。外部の入力手段を用いる場合には、通信により、制御装置2が走行予定データを取得できるように構成することができる。
【0037】
そして、本実施例では、制御装置2は、走行予定に基づく実際の電気自動車の走行時において、前記必要電力量aの予測及び前記発電電力量bの予測の双方に関して変動がないかどうかを常に監視する。具体的には、走行経路の実際の渋滞情報を外部ネットワーク20から取得することに基づいて、バッテリ3の必要電力量aを再計算し、前記走行経路に沿う実際の天候情報を外部ネットワーク20から取得することに基づいて、太陽電池5の発電電力量bを再計算するようになっている。
【0038】
さらに、制御装置2は、それら再計算の結果に基づいて、目的地に到達するまでにバッテリ3の電力量が不足するかどうかを判断する。電力量の不足が発生すると判断したときには、制御装置2は、例えば表示装置11の表示や音声出力により、ユーザに対して車載機器の電力消費量を抑えるような調整操作を促す報知を行う。具体的には、カーエアコンがオンされている場合には、温度や風量を抑えるように促したり、カーオーディオを楽しんでいる場合には、ボリュームを小さくするように促したりする報知を行う。
【0039】
この報知の後、バッテリ3の電力量について改善があったかどうかが判断され、改善があった場合には、目的地に到達するまでにバッテリ3の電力量が不足するかどうかの判断を再度行うようになっている。これに対し、バッテリ3の電力量について改善がみられなかった場合には、制御装置2は、走行経路に沿う或いは近傍の充電可能な充電設備を探索し、当該充電設備に向うように案内する。従って、制御装置2は、監視手段としても機能すると共に、判断手段、報知手段、案内手段として機能する。
【0040】
次に、上記構成の作用について、図2及び図3も参照して説明する。図2のフローチャートは、前日において、走行予定データの入力に基づき自宅で家庭用電源を用いてバッテリ3の充電(予約充電)を行う場合に、制御装置2(及び充電管理ECU6)が実行する処理手順を示している。また、図3のフローチャートは、前記走行予定に基づく実際の走行時において、制御装置2が実行するバッテリ3の充電制御に関する処理手順を示している。
【0041】
即ち、まず図2において、ステップS1では、ユーザの遠隔操作デバイス26の操作により、翌日の走行予定、即ち、目的地(経由地を含む)や出発予定時刻(あるいは到着希望時刻)からなる走行予定データが入力される。ステップS2では、出発地(自宅)から入力された目的地までの推奨する走行経路が算出される。ステップS3では、前記携帯電話機18或いは車載通信機19を用いた外部ネットワーク20との通信により、予定の走行時間帯における前記走行経路付近の天候情報が収集される。
【0042】
この場合、走行経路が長い(広範囲にわたる)場合には、走行経路を複数の走行行程に分け、各行程の通過時間を考慮しながら、天候情報が収集される。また、気象庁から発表される天気予報の信頼度のデータ(信頼度が高い方から順にA、B、Cと区分される)も併せて取得される。次のステップS4では、車両が前記走行予定の時間帯に前記走行経路を走行した際に太陽電池5により発電可能な発電電力量bの予測が行なわれる。
【0043】
この発電電力量bの予測は、例えば、基準となるバッテリ3の単位時間当たりの発電量に、各走行行程毎の天候により決まる発電効率及び当該走行行程における走行時間を乗算したものを、全行程に関して加算することにより求めることができる。このとき、晴れの場合には、発電効率を100%とし、曇りの場合には、発電効率を50%とし、雨の場合には、発電効率を10%として計算する。また、信頼度のデータがある場合には、上記発電効率に対し更に信頼度に応じた数値(例えば、信頼度Aでは80%、信頼度Bでは70%、信頼度Cでは50%)を乗算することができる。
【0044】
このようにして発電電力量bの予測がなされると、次のステップS5では、バッテリ3の残存電力量cの情報が取得される。そして、ステップS6にて、バッテリ3に対して充電すべき充電電力量dが決定される。この充電電力量dは、上記走行経路のデータ等から、走行予定データに基づく翌日の走行に必要なバッテリ3の必要電力量aを計算(予測)し、その必要電力量aから、上記発電電力量b及び残存電力量cを減算することにより求められる。
【0045】
なお、充電電力量dの計算では上記のように必要電力量aから、上記発電電力量b及び残存電力量cを減算し、さらに安全のためにマージン電力量eを加算したものとしてもよい。これは予期しないバッテリ切れの可能性をなるべく低減するためのものである。ただし、必要以上にマージン電力量eを加算しては無駄となりかねないため、この量は予め定められた少量の値である。たとえば、バッテリの満充電量(総充電量)に係数(0.01など)を乗じた値とすることができる。
【0046】
この後、充電開始が指示される(或いは充電予約がなされた時刻になる)と、ステップS7にて、バッテリ3に対する充電が開始される。この場合、ユーザが、例えば深夜帯の充電予約を行うことにより、充電時に立ち会わなくても、安価な深夜電力を利用してバッテリ3の充電を行うことが可能となる。尚、予約を行った場合には、ユーザが、充電用コネクタ4に対する充電ケーブルの接続など、充電に必要な準備作業を予め行っておくことは勿論である。
【0047】
ステップS8では、必要な充電量に達したか、つまり上記した充電電力量dに関する充電が完了したかどうかが判断される。必要な充電量に達していない場合には(ステップS8にてNo)、ステップS3に戻り、天候情報の収集からの処理が繰返される。これは充電中において、天候情報の変更が発生する可能性があるからであり、天候情報が変更された場合には、発電電力量bひいては充電電力量dにも変更が発生するケースがある。バッテリ3に対する必要な充電が完了すると(ステップS8にてYes)、ステップS9にて充電が停止され、処理が終了する。
【0048】
これにより、翌日の走行予定のデータが入力されることに伴い、予定される走行経路を走行する際に必要となるバッテリ3の必要電力量aを予測すると共に、走行経路を走行した際の太陽電池5の発電電力量bを予測することができる。そして、バッテリ3の残存電力量c及び前記発電電力量bから、前記必要電力量aを得るために要する充電電力量dが求められ、走行予定の前日に家庭用電源から安価な深夜電力を用いてバッテリ3に対する充電を行うことができる。この場合、バッテリ3に対し、当日走行時における太陽電池5の発電による充電電力量を考慮した、外部電源からの必要最小限の充電を実行すれば済み、充電コスト及び充電時間の節約を図ることができる。
【0049】
次に、実際の走行時に制御装置2が実行する処理手順を示す図3のフローチャートにおいて、まずステップS11では、バッテリ3の現在の残存電力量の情報が収集される。ステップS12では、前記携帯電話機18或いは車載通信機19を用いた外部ネットワーク20との通信により、車両の現在位置から先の予定する走行経路付近に関する天候情報が収集される。ステップS13では、前記携帯電話機18或いは車載通信機19を用いた外部ネットワーク20との通信により、車両の現在位置から先の予定する走行経路付近に関する渋滞情報(道路交通情報)が収集される。
【0050】
次のステップS14では、上記ステップS12で収集した天候情報に基づいて、自車の現在位置から目的地までに関する太陽電池5の発電電力量bの計算(予測)が行なわれる。ステップS15では、上記ステップS13で収集した渋滞情報(道路交通情報)に基づいて、自車の現在位置から目的地に到達するまでに必要と予測される必要電力量aの計算(予測)が行なわれる。そして、ステップS16では、現在のバッテリ3の電力量で、目的地まで到達可能であるかどうか、つまり不足が生じないかどうかが判断される。
【0051】
ここで、前日に算出された太陽電池5の発電電力量b及びバッテリ3の必要電力量aは、予測であって、その後の状況(天候や道路状況)の変化によって変動することが起り得る。例えば、前日においては晴れの予報であったものが、天候情報が曇り或いは雨に変わっていると、太陽電池5の発電電力量bが前日の予測よりも減少することになり、また、実際の走行時に道路に渋滞が発生していると、目的地に到着するまでの時間が前日の予測よりも長くかかり、消費する必要電力量aが多くなってしまうことになる。そのような事態が生じた場合、電力が不足して目的地まで到達できなくなる虞が考えられる。
【0052】
太陽電池5の発電電力量bの予測、及び、バッテリ3の必要電力量aの予測にさほどの変動がない場合には、目的地まで到達可能である(電力不足が生ずることはない)と判断され(ステップS16にてYes)、ステップS11からの処理が繰返される。これに対し、太陽電池5の発電電力量bが前日の予測よりも大幅に少なくなる、及び/又は、渋滞等によって消費する必要電力量aが前日の予測よりも大幅に多くなる虞が考えられる場合には、目的地まで到達できない(電力不足が生ずる)と判断される(ステップS16にてNo)。
【0053】
この判断には例えば基準となる閾値を設け、発電電力量bが前日の予測よりも第1閾値以上少なくなるか、また、必要電力量aが前日の予測よりも第2閾値以上多くなるかにより判断すればよい。ここで第1閾値と第2閾値とは同じ値にしてもよいし、別の値にしてもよい。また第2閾値を第1閾値よりも大きくしてもよい。これはたとえば必要電力量aの算出に、上述のマージン電力量eを採用している場合に特に適用できる。つまり、マージンの分、第2閾値を大きくとるようにするのである。こうすれば、後述するユーザへの警告、注意喚起などの頻度が減り、ユーザのわずらわしさを低減することができる。
【0054】
このときには、まずステップS17にて、ユーザに対して、車載機器この場合カーエアコンやカーオーディオにおける電力消費を抑えるための調整操作を促す報知がなされる。ここでは、例えば、エアコンの設定温度を省エネの方向に変更したり、風量を下げたり、オーディオのボリュームを下げたりすることを促すための報知(表示装置11の表示)がなされる。ステップS18ではタイマー処理がなされる。これは、上記ステップS17の報知の後、ユーザにより車載機器の調整(設定変更)がなさることを所定時間(例えば5分)だけ待つものである。
【0055】
この後、ステップS19にて、再度、現在のバッテリ3の電力量で、目的地まで到達可能であるかどうか、つまり不足が生じないかどうかが判断される。このとき、上記ステップS17の報知に伴い、ユーザによって車載機器の調整がなされ、今後のバッテリ3の電力消費が抑えられると予測される場合がある。そのようにバッテリ3の電力消費が抑えられる結果、目的地まで到達可能となると判断できたならば(ステップS19にてYes)、ステップS11からの処理が繰返される。
【0056】
これに対し、依然として、目的地まで到達できない(バッテリ3の電力不足が生ずる)と判断された場合には(ステップS19にてNo)、ステップS20にて、自車の現在位置から目的地までの走行経路に沿う、或いは、当該走行経路の近傍において、バッテリ3の充電が可能な充電設備が検索される。そして、ステップS21にて、検索された充電設備に立ち寄ってバッテリ3の充電を行うように、ユーザに対する案内が行われる。
【0057】
これにより、前日において、走行予定に基づく必要電力量a及び発電電力量bの予測が行なわれ、バッテリ3に対する必要な充電が行なわれているとは言うものの、実際の走行時にあって、走行経路において渋滞が発生していたり、天候の予期しない変動があったりしても、実際の走行時におけるバッテリ3の必要電力量a、及び、太陽電池5の発電電力量bが、予測からどの程度変動しているかを監視することができる。
【0058】
そして、もし、バッテリ3の電力が不足する虞が生じた場合でも、次の2段階で対応することができる。車載機器の調整によってバッテリ3の電力消費を少なく抑えて電力不足を回避できる場合もあるので、対応の第1段階では、車載機器を調整する旨が報知される。これにて、例えば充電設備に立ち寄って充電を行なわずとも、バッテリ3の電力不足を回避することが可能となる。その程度では電力不足が解消されない場合には、第2段階として、最寄りの充電設備を検索してユーザに対する案内が行われる。従って、ユーザは容易に充電設備に立ち寄って自車のバッテリ3の充電を行うことができる。
【0059】
このように本実施例の充電制御システム1によれば、ユーザが翌日の走行予定のデータを入力することにより、目的地までの走行経路情報を取得すると共に外部ネットワーク20から天候情報(及び信頼度)を取得し、バッテリ3の必要電力量a及び太陽電池5の発電電力量bを十分な確かさで予測して、充電電力量dを求め、バッテリ3に対する外部電源からの充電を実行する。このとき、バッテリ3に対し、太陽電池5の発電による充電電力量を考慮した、外部電源からの必要最小限の充電を実行すれば済むので、充電コスト及び充電時間の節約を図ることが可能となる。
【0060】
また、特に本実施例では、実際の電気自動車の走行時に、必要電力量aの予測及び前記発電電力量bの予測に関して変動がないかどうかを常に監視するようにした。このとき、目的地に到達するまでにバッテリ3の電力量が不足するかどうかを判断し、電力量の不足が発生すると判断したときには、ユーザに対して車載機器の電力消費量を抑えるような調整操作を促す報知を行うようにしたり、充電設備を探索して案内したりするようにしたので、適切な対処を行なうことができ、バッテリ3の電力量が不足してしまうといった事態を回避することが可能となる。
【0061】
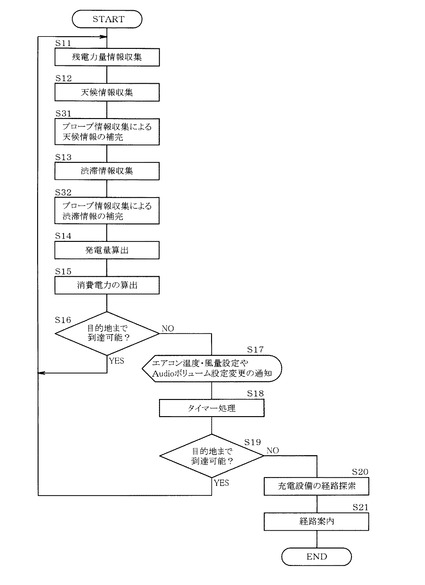
図4は、本発明の第2の実施例を示すものであり、走行予定に基づく実際の電気自動車の走行時において制御装置2が実行する処理手順を示すフローチャートである。この第2の実施例においては、予定の走行経路を先行する他車両からのプローブ情報を取得するプローブ情報取得手段を設け、前記監視手段を、前記プローブ情報に基づいて、走行経路の実際の渋滞情報及び走行経路に沿う実際の天候情報を補完するように構成している。尚、走行予定の前日の予約充電の処理等については、上記第1の実施例と同様に実行されるようになっており、以下、第1の実施例と異なる点について説明する。
【0062】
図示はしないが、外部ネットワーク20には情報センタが接続されており、この情報センタは、多数の車両から送信されるプローブ情報を受信し、蓄積記憶(更新)するようになっている。このとき、多数の車両から送信されるプローブ情報には、例えば各車両の位置や時刻のデータと共に、その地点における最新の交通情報(渋滞、事故、工事、車線規制、交通規制などの情報)や最新の天候情報(天候、風向き、路面状況などの情報)のデータを含んでいる。従って、制御装置2が、携帯電話機18及び車載通信機19などと共に、プローブ情報取得手段として機能を果たす。尚、制御装置2は、情報センタに対してプローブ情報を送信する機能も有する。
【0063】
本実施例では、走行予定に基づく自車の実際の走行時において、制御装置2は、携帯電話機18又は車載通信機19を用いた通信により、外部ネットワーク20を介して前記情報センタから、必要なプローブ情報を収集する。この場合、プローブ情報として、予定の走行経路を先行する他車両(自車の現在位置から例えば1km先、3km先、5km先、10km先など)から、走行経路に関する渋滞情報(各車両の速度や、渋滞距離、渋滞通過時間などの情報)及び走行経路に沿う天候情報(各車両のワイパの作動状態や、雨滴センサ、日射センサ等の出力などの情報)が取得される。
【0064】
そして、制御装置2は、必要電力量aの予測及び発電電力量bの予測に関して変動がないかどうかを監視するにあたって、取得したプローブ情報により、実際の渋滞情報及び実際の天候情報の補完を行うように構成されている。即ち、図4のフローチャートに示すように、バッテリ3の現在の残存電力量の情報が収集され(ステップS11)、予定する走行経路付近に関する気象庁等からの天候情報が収集された(ステップS12)後、ステップS31にて、天候に関するプローブ情報が収集されて天候情報の補完が行なわれる。
【0065】
そして、道路交通情報センタから予定する走行経路に関する渋滞情報が収集された(ステップS13)後、ステップS32にて、渋滞に関するプローブ情報が収集されて渋滞情報の補完が行なわれる。この後、ステップS14にて、上記ステップS31で補完した天候情報に基づいて、車両の現在位置から目的地までに関する太陽電池5の発電電力量bの計算(予測)が行なわれる。ステップS15では、上記ステップS32で補完した渋滞情報(道路交通情報)に基づいて、車両の現在位置から目的地に到達するまでに必要と予測される必要電力量aの計算(予測)が行なわれる。
【0066】
この場合、ステップS31にて、プローブ情報により天候情報を補完することによって、突然雨が降ってきたがすぐに止むいわゆる通り雨など、短時間で天気が変化するような場合にも容易に対応できることは勿論、気象庁ではカバーしきれない細かな限定地域にも対応することができる。例えば、数km四方程度のスポット的な地域で、短時間で天候が変りやすいところや、天気の切れ目が存在しやすい傾向にある地域などにあっては、信頼度のランクを下げる等によって対応することができる。
【0067】
また、ステップS32にて、プローブ情報により渋滞情報を補完することによって、より現実に対応した渋滞情報を得ることができ、渋滞の距離(区間)やその区間の通過に要する時間等に関する高精度の情報を得ることができる。この結果、ステップS14における太陽電池5の発電電力量bの予測、及び、ステップS15における必要電力量aの予測を、現実に即したより緻密な計算によって行うことができ、それらの計算により高い信頼性が得られる。尚、ステップS16以降の処理は、上記第1の実施例(図3)と同様であるため、説明を省略する。
【0068】
このような第2の実施例によれば、上記第1の実施例と同様に、太陽電池5を搭載した電気自動車における走行用モータの電源となるバッテリ3を充電するに際し、バッテリ3に対する外部電源からの充電量を必要最小限に抑えることができ、充電コスト及び充電時間の節約を図ることができるという優れた効果を得ることができる。そして、実際の電気自動車の走行時に、必要電力量aの予測及び発電電力量bの予測に関して変動がないかどうかを常に監視するにあたり、プローブ情報に基づいて、渋滞情報及び天候情報を補完するようにしたので、必要電力量a及び発電電力量bの計算をより緻密に行うことができるというメリットを得ることができる。
【0069】
なお、上記ステップ31においては、天候が不安定な限定地域が判明した場合、その地域の天候信頼度のランクをさらに下げるようにしていたが、さらにステップ32を設けたために、次のような天候情報の補完を行うようにすることもできる。
【0070】
たとえば、天候が変わりやすい限定地域に、渋滞などによって長期間(所定時間以上)留まらざるを得ないことが事前にわかった場合には天候の信頼度のランクを下げるが、逆に、その限定地域を比較的短時間で通過できるとわかった場合にはあえて天候の信頼度のランクを下げずに維持するようにしてもよい。つまり、天候が不安定な場所に長期間滞在可能性が高いことが事前にあきらかになれば、その間の発電電力量の予測は重要である。ここで発電電力量を万一誤って実際より多く見積もってしまえば、必要電力量が増加した場合に予期しないバッテリ切れをきたす恐れもある。そこで、信頼度のランクを下げることで、こうした事態を回避することができる。
【0071】
一方、天候が不安定な場所であっても短時間で通過できる場合には、その間の発電電力量の予測はある程度精度が下がったとしても大きな影響はない。そこで、信頼度のランクを下げないのである。煩雑な計算処理を少しでも低減でき、システムの高速化、簡素化につながる。すなわち、天候が不安定な限定地域を走行する場合に、渋滞情報を加味し、その限定地域での滞在時間の長さに応じ、天候の信頼度を設定するようにしてもよい。このようにすれば、煩雑な計算処理をなるべく低減しつつ、必要な電力量を精度よく予測できるようになる。
【0072】
尚、上記各実施例では特に説明しなかったが、本発明においては、走行経路を走行する際に必要と予測されるバッテリ3の必要電力量aを計算するにあたり、ユーザが嗜好する車載機器の使用態様に基づき、当該車載機器において消費すると予測されるバッテリ3の電力を加味して計算を行うことができる。これには普段のユーザの車載機器の使用状態をその消費電力量とともに記憶し、活用するようにすればよい。つまりたとえば、そのときの気温、天候、時間帯、混雑度合いなどの環境により、車載機器(エアコン、オーディオなど)の使用状況すなわち消費電力量は異なるので、それら環境と消費電力量の実績を紐付けて記憶しておく。そして、それら過去の環境と、現在の環境を比較し、類似の環境における過去の消費電力量を予測に使用するのである。これによれば、バッテリ3の必要電力量aの計算を、より緻密に行うことができる。これに加えて、特にユーザの嗜好が車載機器の電力消費量が多いものである場合には、車載機器の設定に関する調整により、電力消費量を抑える効果が大きいものとなる。
【0073】
また、上記各実施例では、走行予定に基づく実際の電動車両の走行時において、バッテリ3の必要電力量a及び太陽電池5の発電電力量bの双方について変動がないかどうかを監視するように構成したが、いずれか一方について監視を行う構成であっても良い。上記各実施例では、バッテリ3の電力不足により目的地まで到達できないと判断された場合に、最寄の充電設備を探索するようにしたが(ステップS20)、予め走行経路又はその近傍の充電設備を探索し、記憶しておき、目的地まで到達できないと判断された際に、到達可能な充電設備を案内するような構成としても良い。
【0074】
さらには、上記各実施例では、目的地までの推奨する走行経路を、制御装置2が計算するように構成したが、外部の経路計算センタにおいて経路計算を行い、そのデータを通信によって取得するようにしたいわゆるセンタ計算型のナビゲーションシステムであっても良い。上記したように、ユーザが、車載操作装置でなく、外部のパソコンや携帯端末を用いて走行予定を入力し、その走行予定のデータを通信により取得するように構成することもできる。その他、本発明は、電気自動車に限らず、外部電源からのバッテリへの充電が可能ないわゆるプラグインハイブリッド車にも適用することができる等、要旨を逸脱しない範囲内で適宜変更して実施し得るものである。
【符号の説明】
【0075】
図面中、1は充電制御システム、2は制御装置(経路情報取得手段、必要電力計算手段、発電量予測手段、充電実行手段、監視手段、判断手段、充電設備探索手段)、3はバッテリ、4は充電用コネクタ、5は太陽電池、6は充電管理ECU、9は操作スイッチ群、11は表示装置(報知手段、案内手段)、18は携帯電話機(天候情報取得手段、プローブ情報取得手段)、19は車載通信機(天候情報取得手段、プローブ情報取得手段)、20は外部ネットワーク、26は遠隔操作デバイス(走行予定取得手段)を示す。
【技術分野】
【0001】
本発明は、走行用モータと、充電可能なバッテリと、太陽電池とを備える電動車両における、前記バッテリの充電を制御する電動車両の充電制御システムに関する。
【背景技術】
【0002】
近年、環境・エネルギ問題の解決に寄与するものとして、バッテリ(二次電池)を電源として駆動する走行用モータを備えた電気自動車や、いわゆるプラグインタイプのハイブリッド車(電動車両と総称する)の普及が進んできている。これら電動車両は、外部電源によるバッテリの充電が可能に構成され、例えば充電設備を備えた充電ステーションや駐車場等でバッテリの充電を行うことは勿論、家庭用電源を用いて自宅でバッテリの充電を行うことも可能とされている。
【0003】
家庭用電源を用いて自宅でバッテリの充電を行う場合、電力料金の安い深夜電力を用いて充電することが望ましい。そこで、従来では、ユーザが充電開始時刻を設定できる、即ち、充電予約を可能としたものが考えられている(例えば特許文献1参照)。これによれば、例えば翌日の電動車両の走行に備えて、前日の夜間等に、安価な深夜電力でバッテリの充電を行うことができる。
【0004】
尚、ハイブリッド車においては、例えば車両の屋根部分に、太陽光エネルギを電力に変換する太陽電池(太陽光発電パネル)を搭載して、太陽電池の発電電力をバッテリに充電できるようにすることも考えられている(例えば特許文献2参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2009−60728号公報
【特許文献2】特開2000−125407号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、上記特許文献1においては、予約された時刻にバッテリに対する充電を開始した後、バッテリの電力量が所定値(満充電の80%)に達したときに、自動で充電を終了させるようにしている。ところが、そのように、常に一定電力量に達するまでバッテリの充電を行うものでは、必ずしも適切な充電が行えるとは限らず、例えばコスト面や充電時間の面で、必要量を越えて余分な充電を行ってしまうこともあり得る。特に、特許文献2に示されたような太陽電池を搭載した電動車両では、昼間の走行時の太陽電池による発電電力をバッテリの充電に利用することを考慮すれば、その分、外部電力によるバッテリの充電量を少なく済ませることができるものと考えられる。
【0007】
本発明は上記事情に鑑みてなされたもので、その目的は、太陽電池を搭載した電動車両における走行用モータの電源となるバッテリを充電するに際し、前記バッテリに対する外部電源からの充電量を必要最小限に抑えることができ、充電コスト及び充電時間の節約を図ることが可能な電動車両の充電制御システムを提供するにある。
【課題を解決するための手段】
【0008】
上記目的を達成するために、本発明の電動車両の充電制御システムは、走行用モータと、この走行用モータの電源となる充電可能なバッテリと、走行中における発電が可能な太陽電池とを備える電動車両における、前記バッテリに対する外部電源による充電及び前記太陽電池の発電電力による充電を制御するものであって、ユーザが入力した前記電動車両を走行させる予定の日時及び目的地を含んだ走行予定データを取得する走行予定取得手段と、前記走行予定データにおける目的地までの走行経路を取得する経路情報取得手段と、前記走行経路を走行する際に必要と予測される前記バッテリの必要電力量aを計算する必要電力計算手段と、前記走行予定データの走行時間帯における前記走行経路付近の天候情報を取得する天候情報取得手段と、前記走行時間帯に前記走行経路を走行した際の前記太陽電池の発電電力量bを前記天候情報に応じた発電効率を用いて予測する発電量予測手段と、前記バッテリの残存電力量c及び前記太陽電池の発電電力量bから前記バッテリの必要電力量aを得るために要する充電電力量dを求め前記走行予定の日時に至る前までに前記外部電源から充電させる充電実行手段とを備えるところに特徴を有する(請求項1の発明)。
【0009】
上記構成によれば、車載操作装置や、パソコン、携帯端末等を用いてユーザが入力した翌日或いは翌日以降の走行予定データが、走行予定取得手段により取得されると、経路情報取得手段により、目的地までの走行経路が得られる。目的地までの走行経路が得られたならば、必要電力計算手段により、その走行経路を走行する際に必要と予測されるバッテリの必要電力量aを計算することができる。更に、天候情報取得手段により、走行予定の時間帯における走行経路付近の天候情報が取得され、発電量予測手段により、前記時間帯に走行経路を走行した際の太陽電池の発電電力量bを、前記天候情報に応じた発電効率を用いて予測することができる。
【0010】
そして、充電実行手段により、バッテリの残存電力量c及び前記発電電力量bから、前記必要電力量aを得るために要する充電電力量dが求められ、走行予定の日時に至る前までに外部電源からバッテリに対する充電が行われる。従って、この場合、バッテリに対し、太陽電池の発電による充電電力量を考慮した、外部電源からの必要最小限の充電を実行すれば済むので、充電コスト及び充電時間の節約を図ることができる。このとき、予定する走行経路が判明していることにより、必要電力量aの予測を、十分な確かさで行うことができると共に、天候情報を用いることにより、太陽電池の発電電力量bの予測を、現実に即して、十分な確かさで行うことができる。
【0011】
本発明においては、前記天候情報取得手段を、前記天候情報と共に当該天候情報の信頼度を取得するように構成すると共に、前記発電量予測手段を、前記太陽電池の発電電力量bを、前記天候情報の信頼度を考慮して予測するように構成することができる(請求項2の発明)。これにより、予想された天候と実際の天候とが異なっていた場合における、太陽電池の予測した発電電力量bと実際の発電電力量との誤差を小さくして、より堅実性の高い予測を行うことができる。
【0012】
ところで、バッテリの電力は、走行に要する(走行用モータの駆動に係る)ものだけではなく、他の車載機器例えばカーエアコンやカーオーディオ等においても、消費される。この場合、ユーザの嗜好に応じて車載機器の電力消費量は変動する。本発明においては、前記必要電力計算手段を、ユーザが嗜好する車載機器の使用態様に基づき、当該車載機器において消費すると予測されるバッテリの電力を加味して、バッテリの必要電力量aを計算するように構成することができる(請求項3の発明)。これによれば、バッテリの必要電力量aの計算を、より緻密に行うことができる。
【0013】
また、上記のような走行予定に基づく必要電力量a及び発電電力量bの予測については、十分な確かさで予測できるとは言うものの、実際の走行時にあって、走行経路において渋滞が発生していたり、天候の予期しない変動があったりして、予測と実際とが一致しなくなる虞がある。
【0014】
そこで、本発明においては、前記走行予定に基づく実際の電動車両の走行時において、前記必要電力量aの予測及び前記発電電力量bの予測の一方又は双方に関して変動がないかどうかを常に監視する監視手段を設けることができる(請求項4の発明)。これによれば、実際の電動車両の走行時において、監視手段により、実際のバッテリの必要電力量a及び/又は太陽電池の発電電力量bが、予測からどの程度変動しているかを監視することができる。
【0015】
より具体的には、前記監視手段を、前記走行経路の実際の渋滞情報に基づいて、前記バッテリの必要電力量aを再計算する、及び/又は、前記走行経路に沿う実際の天候情報に基づいて、前記太陽電池の発電電力量bを再計算するように構成することができる(請求項5の発明)。これにより、より実情に即したバッテリの必要電力量a及び/又は太陽電池の発電電力量bの監視を行うことができる。
【0016】
このとき、前記走行経路を先行する他車両からのプローブ情報を取得するプローブ情報取得手段を設け、前記監視手段を、前記プローブ情報に基づいて、前記走行経路の実際の渋滞情報及び/又は前記走行経路に沿う実際の天候情報を補完するように構成しても良い(請求項6の発明)。これによれば、バッテリの必要電力量a及び/又は太陽電池の発電電力量bの計算をより緻密に行うことができる。
【0017】
更に、前記走行予定に基づく実際の電動車両の走行時において、目的地に到達するまでに前記バッテリの電力量が不足するかどうかを判断する判断手段と、この判断手段が電力量の不足が発生すると判断したときに、ユーザに対して車載機器の電力消費量を抑えるような調整操作を促す報知手段とを設けることができる(請求項7の発明)。報知手段による報知を受けてユーザが車載機器を調整することにより、その後のバッテリの電力消費を少なく抑えることができ、バッテリの電力量が不足してしまうといった事態を回避することが可能となる。
【0018】
或いは、前記走行経路に沿う或いは近傍の充電可能な充電設備を探索する充電設備探索手段と、前記走行予定に基づく実際の電動車両の走行時において、目的地に到達するまでに前記バッテリの電力量が不足するかどうかを判断する判断手段と、この判断手段が電力量の不足が発生すると判断したときに、前記充電設備探索手段により探索された充電設備に向うように案内する案内手段とを設けることができる(請求項8の発明)。これにより、目的地までの走行途中にバッテリの電力量が不足してしまう虞がある場合には、ユーザは容易に充電設備に立ち寄って自車の充電を行うことができるので、バッテリ切れといった不測の事態に備えることができる。
【図面の簡単な説明】
【0019】
【図1】本発明の第1の実施例を示すもので、充電制御システムの電気的構成を概略的に示すブロック図
【図2】制御装置の実行する充電予約時における処理手順を示すフローチャート
【図3】制御装置の実行する走行時における処理手順を示すフローチャート
【図4】本発明の第2の実施例を示す図3相当図
【発明を実施するための形態】
【0020】
以下、本発明を電気自動車に適用した第1の実施例について、図1ないし図3を参照しながら説明する。図1は、電気自動車に搭載される本実施例に係る充電制御システム1の全体構成を概略的に示している。本実施例では、充電制御システム1は、車載ナビゲーションシステムを含んで(兼用して)構成されており、システム全体を制御する制御装置2を共用化した形態で備えている。この制御装置2は、CPU、ROM、RAM、I/O、それらを相互に接続するバスラインを含むコンピュータを主体として構成され、後述するように、ナビゲーションやバッテリの充電制御に関する各種処理を実行する。
【0021】
ここで、詳しく図示はしないが、電動車両としての電気自動車は、車輪を回転駆動する動力源として走行用モータを備えると共に、その走行用モータの電源となる例えばリチウムイオン二次電池等のバッテリ3を備えている。尚、本発明における「バッテリ」とは、繰返しの充放電が可能なキャパシタも含む概念である。また、電気自動車には、他にもカーエアコンやカーオーディオ等の車載機器が設けられ、前記バッテリ3は、それら他の車載機器の電源となる。
【0022】
このとき、図1に一部に示すように、電気自動車のボディの例えば側壁には、充電コネクタ4(充電口)が設けられている。この充電コネクタ4には、充電用ケーブルを介して外部電源である充電設備が着脱自在に接続される。前記充電設備としては、例えば家庭用電源コンセントや、充電ステーションや駐車場等に設けられた外部充電設備等があり、ユーザは、自宅でバッテリ3の充電を行ったり、公共の外部充電設備でバッテリ3の充電を行ったりすることができる。
【0023】
そして、これも図1にのみ示すように、電気自動車のボディの屋根部分には、太陽電池(太陽光発電パネル)5が搭載されている。この太陽電池5は、周知のように、太陽光等の光エネルギを電気エネルギに変換するものであり、照射された光エネルギ量に応じた電力を発電する。本実施例では、後述するように、太陽電池5の発電電力により、前記バッテリ3に対する充電を行うことが可能に構成されている。充電制御システム1には、前記バッテリ3に対する充電を制御(実行)する充電管理ECU6が設けられる。
【0024】
図1に示すように、充電制御システム(車載ナビゲーションシステム)1の制御装置2には、自車の位置を検出するための自車位置検出手段としての位置検出器7、地図データを入力する地図データ入力器8、操作スイッチ群9、例えばハードディスク装置等の外部メモリ10、例えばフルカラー液晶ディスプレイからなる表示装置11、リモコンセンサ12が接続されている。前記リモコンセンサ12は、リモートコントロール端末13(以下「リモコン端末13」という)からの信号を受信する。
【0025】
前記位置検出器7は、いずれも周知の、地磁気センサ14、ジャイロスコープ15、距離センサ16、並びに、GPS用の人工衛星からの送信電波に基づいて自車の位置を検出(測位)するGPS(Global Positioning System )のためのGPS受信機17を含んでいる。前記制御装置2は、前記位置検出器7を構成する各センサ14〜17からの入力に基づいて、自車の現在位置(絶対位置)、進行方向、速度や走行距離、現在時刻等を高精度で検出する。尚、位置検出器7としては、精度によっては、上述のうちの一部で構成しても良く、更に、ステアリングの回転センサ、各転動輪の車輪センサ等を用いても良い。
【0026】
前記地図データ入力器8は、位置検出の精度向上のためのいわゆるマップマッチング用データ、地図データ及び目印データを含む各種データを入力する。媒体としては、そのデータ量からDVD−ROM(又はCD−ROM)を用いるのが一般的であるが、ハードディスクやメモリカード等の媒体を用いても良い。前記表示装置11の画面には、位置検出器7により検出された車両の現在位置と、地図データ入力器8から入力された地図データと、さらに誘導経路などの付加データとを重ねて表示することができる。
【0027】
前記地図データは、例えば日本全土の地図上の道路を線で表現した道路ネットワークからなり、交差点、分岐点等をノードとして複数の部分に分割し、各ノード間の部分をリンクとして規定したリンクデータとして与えられる。このリンクデータは、リンク固有のリンクID(識別子)、リンク長、リンクの始点,終点(ノード)の位置データ(経度,緯度)、角度(方向)データ、道路幅、道路種別などのデータを含んで構成される。
【0028】
前記操作スイッチ群9は、表示装置11の画面上に設けられたタッチパネルや表示装置11の周囲に設けられたメカスイッチを含んでおり、ユーザは、目的地の設定などの各種の入力や選択設定を行うことができる。前記リモコン端末13の操作によっても、同様に目的地の設定などを行うことができる。制御装置2は、経路探索、案内プログラムの実行により、出発地(現在地)から、例えばユーザの操作スイッチ群9等の操作によって設定された目的地までの推奨する経路を演算により求め、その推奨する経路を案内するルートガイダンス機能を実行する。従って、本実施例では、制御装置2が経路情報取得手段として機能する。
【0029】
上記した経路探索には、例えば、周知のダイクストラ法が用いられ、地図データ入力器8により入力される地図データ(リンク、ノードのデータ)を用いて、出発地(現在地)から目的地へ向けて、次に到達できる交差点(ノード)までの道路(リンク)の探索及びそのコスト(評価値)の計算を順次行っていき、目的地までが最小コストとなるつながったルート(リンク列)を求めることにより行われる。また、この経路探索において、外部から通信により得られた道路交通情報や気象情報等を加味することもできる。経路案内は、周知のように、表示装置11の画面に、道路地図上の走行すべきルートを例えば他の道路と異なる色で表示すると共に、自車の現在位置が所定のポイントに至ったときに、図示しない音声出力装置により案内音声を出力することによって行われる。
【0030】
そして、前記制御装置2には、外部との間で無線通信を行うための携帯電話機18や車載通信機19が接続され、これらにより、外部ネットワーク20(インターネットや専用の情報センタ)との接続が可能とされている。このとき、例えば、道路交通情報センタから提供される最新の道路交通情報(渋滞、事故、工事、車線規制、交通規制などの情報)を受信したり、気象庁から提供される最新の気象情報(天候、風向き等)を受信したりすることが可能とされている。本実施例では、後述するように、制御装置2は外部ネットワーク20を介して、予定される走行時間帯における自車の走行経路付近の天候情報並びにその天候情報の信頼度を取得するようになっており、従って、携帯電話機18及び車載通信機19が、天候情報取得手段として機能する。
【0031】
また、前記制御装置2には、パーキングブレーキ21や車速センサ22からの信号も入力されるようになっている。さらに、制御装置2は、例えばCAN(Controller Area Network)等の図示しない車内LANを介して、ボデー系EUC23や走行制御系ECU24、ETC車載器25、遠隔操作デバイス26、前記充電管理ECU6と相互に接続されている。前記遠隔操作デバイス26は、ナビゲーションや他の車載機器に対する各種の入力や設定操作、バッテリ3に対する外部電源による充電の指示(予約)等を行うためのものであり、例えば運転席の側部(センターコンソール部分)に設けられ、ジョイスティックや複数個の操作スイッチを備えて構成されている。
【0032】
さて、本実施例では、前記制御装置2は、充電管理ECU6を介してバッテリ3に対する外部電源による充電を実行、制御する。また、充電管理ECU6は、バッテリ3に対する太陽電池5の発電電力による充電を実行する。尚、充電管理ECU6は、バッテリ3の出力電圧や出力電流などを監視して残存容量(SOC)を常時検出し、例えばメータ部の所定欄に表示するように構成されている。
【0033】
上記のように、ユーザは、前記遠隔操作デバイス26を操作することにより、バッテリ3の充電に関する指示入力を行うことができる。この場合、前記バッテリ3に対するリアルタイムでの充電実行(開始)や停止(終了)を指示することができることは勿論、バッテリ3の充電予約(充電開始(終了)時刻の指定)を行うことができる。これにより、ユーザの自宅で家庭用電源からバッテリ3を充電する場合、安価な深夜電力を用いて充電するよう、予約を行うことができる。この際、ユーザが、例えば前日において、翌日の行き先や出発時刻(時間帯)が判っている場合には、その走行予定データを入力することによって、制御装置2は次のような制御を行う。
【0034】
即ち、後の作用説明(フローチャート説明)でも述べるように、ユーザが、遠隔操作デバイス26を操作して、走行予定の日時及び目的地からなる走行予定データを入力すると、まず、制御装置2は、その走行予定データを取得して出発地(自宅)から目的地までの推奨する走行経路を算出(取得)する。これと共に、制御装置2は、その走行経路を走行する際に必要と予測されるバッテリ3の必要電力量aを計算する。そして、制御装置2は、外部ネットワーク20から前記走行予定データの走行時間帯における走行経路付近の天候情報(及び信頼度)を取得し、その走行時間帯に走行経路を走行した際の太陽電池5の発電電力量bを、前記天候情報(及び信頼度)に応じた発電効率を用いて予測する。
【0035】
この後、制御装置2は、バッテリ3の残存電力量c及び太陽電池5の発電電力量bから、前記バッテリ3の必要電力量aを得るために要する充電電力量dを求め、充電管理ECU6により走行予定の日時に至る前までにバッテリ3に対するその充電電力量dの充電を実行させる。
【0036】
従って、前記遠隔操作デバイス26が走行予定データを入力する手段として機能する。また、制御装置2は、走行予定取得手段、経路情報取得手段、必要電力計算手段、発電量予測手段として機能すると共に、携帯電話機18及び車載通信機19と共に天候情報取得手段として機能する。さらに、制御装置2は、充電管理ECU6と共に充電実行手段として機能する。尚、ユーザが走行予定データを入力する手段としては、遠隔操作デバイス26に限らず、他の車載操作装置や、外部のパソコンや携帯端末(携帯電話機18)を用いるようにしても良い。外部の入力手段を用いる場合には、通信により、制御装置2が走行予定データを取得できるように構成することができる。
【0037】
そして、本実施例では、制御装置2は、走行予定に基づく実際の電気自動車の走行時において、前記必要電力量aの予測及び前記発電電力量bの予測の双方に関して変動がないかどうかを常に監視する。具体的には、走行経路の実際の渋滞情報を外部ネットワーク20から取得することに基づいて、バッテリ3の必要電力量aを再計算し、前記走行経路に沿う実際の天候情報を外部ネットワーク20から取得することに基づいて、太陽電池5の発電電力量bを再計算するようになっている。
【0038】
さらに、制御装置2は、それら再計算の結果に基づいて、目的地に到達するまでにバッテリ3の電力量が不足するかどうかを判断する。電力量の不足が発生すると判断したときには、制御装置2は、例えば表示装置11の表示や音声出力により、ユーザに対して車載機器の電力消費量を抑えるような調整操作を促す報知を行う。具体的には、カーエアコンがオンされている場合には、温度や風量を抑えるように促したり、カーオーディオを楽しんでいる場合には、ボリュームを小さくするように促したりする報知を行う。
【0039】
この報知の後、バッテリ3の電力量について改善があったかどうかが判断され、改善があった場合には、目的地に到達するまでにバッテリ3の電力量が不足するかどうかの判断を再度行うようになっている。これに対し、バッテリ3の電力量について改善がみられなかった場合には、制御装置2は、走行経路に沿う或いは近傍の充電可能な充電設備を探索し、当該充電設備に向うように案内する。従って、制御装置2は、監視手段としても機能すると共に、判断手段、報知手段、案内手段として機能する。
【0040】
次に、上記構成の作用について、図2及び図3も参照して説明する。図2のフローチャートは、前日において、走行予定データの入力に基づき自宅で家庭用電源を用いてバッテリ3の充電(予約充電)を行う場合に、制御装置2(及び充電管理ECU6)が実行する処理手順を示している。また、図3のフローチャートは、前記走行予定に基づく実際の走行時において、制御装置2が実行するバッテリ3の充電制御に関する処理手順を示している。
【0041】
即ち、まず図2において、ステップS1では、ユーザの遠隔操作デバイス26の操作により、翌日の走行予定、即ち、目的地(経由地を含む)や出発予定時刻(あるいは到着希望時刻)からなる走行予定データが入力される。ステップS2では、出発地(自宅)から入力された目的地までの推奨する走行経路が算出される。ステップS3では、前記携帯電話機18或いは車載通信機19を用いた外部ネットワーク20との通信により、予定の走行時間帯における前記走行経路付近の天候情報が収集される。
【0042】
この場合、走行経路が長い(広範囲にわたる)場合には、走行経路を複数の走行行程に分け、各行程の通過時間を考慮しながら、天候情報が収集される。また、気象庁から発表される天気予報の信頼度のデータ(信頼度が高い方から順にA、B、Cと区分される)も併せて取得される。次のステップS4では、車両が前記走行予定の時間帯に前記走行経路を走行した際に太陽電池5により発電可能な発電電力量bの予測が行なわれる。
【0043】
この発電電力量bの予測は、例えば、基準となるバッテリ3の単位時間当たりの発電量に、各走行行程毎の天候により決まる発電効率及び当該走行行程における走行時間を乗算したものを、全行程に関して加算することにより求めることができる。このとき、晴れの場合には、発電効率を100%とし、曇りの場合には、発電効率を50%とし、雨の場合には、発電効率を10%として計算する。また、信頼度のデータがある場合には、上記発電効率に対し更に信頼度に応じた数値(例えば、信頼度Aでは80%、信頼度Bでは70%、信頼度Cでは50%)を乗算することができる。
【0044】
このようにして発電電力量bの予測がなされると、次のステップS5では、バッテリ3の残存電力量cの情報が取得される。そして、ステップS6にて、バッテリ3に対して充電すべき充電電力量dが決定される。この充電電力量dは、上記走行経路のデータ等から、走行予定データに基づく翌日の走行に必要なバッテリ3の必要電力量aを計算(予測)し、その必要電力量aから、上記発電電力量b及び残存電力量cを減算することにより求められる。
【0045】
なお、充電電力量dの計算では上記のように必要電力量aから、上記発電電力量b及び残存電力量cを減算し、さらに安全のためにマージン電力量eを加算したものとしてもよい。これは予期しないバッテリ切れの可能性をなるべく低減するためのものである。ただし、必要以上にマージン電力量eを加算しては無駄となりかねないため、この量は予め定められた少量の値である。たとえば、バッテリの満充電量(総充電量)に係数(0.01など)を乗じた値とすることができる。
【0046】
この後、充電開始が指示される(或いは充電予約がなされた時刻になる)と、ステップS7にて、バッテリ3に対する充電が開始される。この場合、ユーザが、例えば深夜帯の充電予約を行うことにより、充電時に立ち会わなくても、安価な深夜電力を利用してバッテリ3の充電を行うことが可能となる。尚、予約を行った場合には、ユーザが、充電用コネクタ4に対する充電ケーブルの接続など、充電に必要な準備作業を予め行っておくことは勿論である。
【0047】
ステップS8では、必要な充電量に達したか、つまり上記した充電電力量dに関する充電が完了したかどうかが判断される。必要な充電量に達していない場合には(ステップS8にてNo)、ステップS3に戻り、天候情報の収集からの処理が繰返される。これは充電中において、天候情報の変更が発生する可能性があるからであり、天候情報が変更された場合には、発電電力量bひいては充電電力量dにも変更が発生するケースがある。バッテリ3に対する必要な充電が完了すると(ステップS8にてYes)、ステップS9にて充電が停止され、処理が終了する。
【0048】
これにより、翌日の走行予定のデータが入力されることに伴い、予定される走行経路を走行する際に必要となるバッテリ3の必要電力量aを予測すると共に、走行経路を走行した際の太陽電池5の発電電力量bを予測することができる。そして、バッテリ3の残存電力量c及び前記発電電力量bから、前記必要電力量aを得るために要する充電電力量dが求められ、走行予定の前日に家庭用電源から安価な深夜電力を用いてバッテリ3に対する充電を行うことができる。この場合、バッテリ3に対し、当日走行時における太陽電池5の発電による充電電力量を考慮した、外部電源からの必要最小限の充電を実行すれば済み、充電コスト及び充電時間の節約を図ることができる。
【0049】
次に、実際の走行時に制御装置2が実行する処理手順を示す図3のフローチャートにおいて、まずステップS11では、バッテリ3の現在の残存電力量の情報が収集される。ステップS12では、前記携帯電話機18或いは車載通信機19を用いた外部ネットワーク20との通信により、車両の現在位置から先の予定する走行経路付近に関する天候情報が収集される。ステップS13では、前記携帯電話機18或いは車載通信機19を用いた外部ネットワーク20との通信により、車両の現在位置から先の予定する走行経路付近に関する渋滞情報(道路交通情報)が収集される。
【0050】
次のステップS14では、上記ステップS12で収集した天候情報に基づいて、自車の現在位置から目的地までに関する太陽電池5の発電電力量bの計算(予測)が行なわれる。ステップS15では、上記ステップS13で収集した渋滞情報(道路交通情報)に基づいて、自車の現在位置から目的地に到達するまでに必要と予測される必要電力量aの計算(予測)が行なわれる。そして、ステップS16では、現在のバッテリ3の電力量で、目的地まで到達可能であるかどうか、つまり不足が生じないかどうかが判断される。
【0051】
ここで、前日に算出された太陽電池5の発電電力量b及びバッテリ3の必要電力量aは、予測であって、その後の状況(天候や道路状況)の変化によって変動することが起り得る。例えば、前日においては晴れの予報であったものが、天候情報が曇り或いは雨に変わっていると、太陽電池5の発電電力量bが前日の予測よりも減少することになり、また、実際の走行時に道路に渋滞が発生していると、目的地に到着するまでの時間が前日の予測よりも長くかかり、消費する必要電力量aが多くなってしまうことになる。そのような事態が生じた場合、電力が不足して目的地まで到達できなくなる虞が考えられる。
【0052】
太陽電池5の発電電力量bの予測、及び、バッテリ3の必要電力量aの予測にさほどの変動がない場合には、目的地まで到達可能である(電力不足が生ずることはない)と判断され(ステップS16にてYes)、ステップS11からの処理が繰返される。これに対し、太陽電池5の発電電力量bが前日の予測よりも大幅に少なくなる、及び/又は、渋滞等によって消費する必要電力量aが前日の予測よりも大幅に多くなる虞が考えられる場合には、目的地まで到達できない(電力不足が生ずる)と判断される(ステップS16にてNo)。
【0053】
この判断には例えば基準となる閾値を設け、発電電力量bが前日の予測よりも第1閾値以上少なくなるか、また、必要電力量aが前日の予測よりも第2閾値以上多くなるかにより判断すればよい。ここで第1閾値と第2閾値とは同じ値にしてもよいし、別の値にしてもよい。また第2閾値を第1閾値よりも大きくしてもよい。これはたとえば必要電力量aの算出に、上述のマージン電力量eを採用している場合に特に適用できる。つまり、マージンの分、第2閾値を大きくとるようにするのである。こうすれば、後述するユーザへの警告、注意喚起などの頻度が減り、ユーザのわずらわしさを低減することができる。
【0054】
このときには、まずステップS17にて、ユーザに対して、車載機器この場合カーエアコンやカーオーディオにおける電力消費を抑えるための調整操作を促す報知がなされる。ここでは、例えば、エアコンの設定温度を省エネの方向に変更したり、風量を下げたり、オーディオのボリュームを下げたりすることを促すための報知(表示装置11の表示)がなされる。ステップS18ではタイマー処理がなされる。これは、上記ステップS17の報知の後、ユーザにより車載機器の調整(設定変更)がなさることを所定時間(例えば5分)だけ待つものである。
【0055】
この後、ステップS19にて、再度、現在のバッテリ3の電力量で、目的地まで到達可能であるかどうか、つまり不足が生じないかどうかが判断される。このとき、上記ステップS17の報知に伴い、ユーザによって車載機器の調整がなされ、今後のバッテリ3の電力消費が抑えられると予測される場合がある。そのようにバッテリ3の電力消費が抑えられる結果、目的地まで到達可能となると判断できたならば(ステップS19にてYes)、ステップS11からの処理が繰返される。
【0056】
これに対し、依然として、目的地まで到達できない(バッテリ3の電力不足が生ずる)と判断された場合には(ステップS19にてNo)、ステップS20にて、自車の現在位置から目的地までの走行経路に沿う、或いは、当該走行経路の近傍において、バッテリ3の充電が可能な充電設備が検索される。そして、ステップS21にて、検索された充電設備に立ち寄ってバッテリ3の充電を行うように、ユーザに対する案内が行われる。
【0057】
これにより、前日において、走行予定に基づく必要電力量a及び発電電力量bの予測が行なわれ、バッテリ3に対する必要な充電が行なわれているとは言うものの、実際の走行時にあって、走行経路において渋滞が発生していたり、天候の予期しない変動があったりしても、実際の走行時におけるバッテリ3の必要電力量a、及び、太陽電池5の発電電力量bが、予測からどの程度変動しているかを監視することができる。
【0058】
そして、もし、バッテリ3の電力が不足する虞が生じた場合でも、次の2段階で対応することができる。車載機器の調整によってバッテリ3の電力消費を少なく抑えて電力不足を回避できる場合もあるので、対応の第1段階では、車載機器を調整する旨が報知される。これにて、例えば充電設備に立ち寄って充電を行なわずとも、バッテリ3の電力不足を回避することが可能となる。その程度では電力不足が解消されない場合には、第2段階として、最寄りの充電設備を検索してユーザに対する案内が行われる。従って、ユーザは容易に充電設備に立ち寄って自車のバッテリ3の充電を行うことができる。
【0059】
このように本実施例の充電制御システム1によれば、ユーザが翌日の走行予定のデータを入力することにより、目的地までの走行経路情報を取得すると共に外部ネットワーク20から天候情報(及び信頼度)を取得し、バッテリ3の必要電力量a及び太陽電池5の発電電力量bを十分な確かさで予測して、充電電力量dを求め、バッテリ3に対する外部電源からの充電を実行する。このとき、バッテリ3に対し、太陽電池5の発電による充電電力量を考慮した、外部電源からの必要最小限の充電を実行すれば済むので、充電コスト及び充電時間の節約を図ることが可能となる。
【0060】
また、特に本実施例では、実際の電気自動車の走行時に、必要電力量aの予測及び前記発電電力量bの予測に関して変動がないかどうかを常に監視するようにした。このとき、目的地に到達するまでにバッテリ3の電力量が不足するかどうかを判断し、電力量の不足が発生すると判断したときには、ユーザに対して車載機器の電力消費量を抑えるような調整操作を促す報知を行うようにしたり、充電設備を探索して案内したりするようにしたので、適切な対処を行なうことができ、バッテリ3の電力量が不足してしまうといった事態を回避することが可能となる。
【0061】
図4は、本発明の第2の実施例を示すものであり、走行予定に基づく実際の電気自動車の走行時において制御装置2が実行する処理手順を示すフローチャートである。この第2の実施例においては、予定の走行経路を先行する他車両からのプローブ情報を取得するプローブ情報取得手段を設け、前記監視手段を、前記プローブ情報に基づいて、走行経路の実際の渋滞情報及び走行経路に沿う実際の天候情報を補完するように構成している。尚、走行予定の前日の予約充電の処理等については、上記第1の実施例と同様に実行されるようになっており、以下、第1の実施例と異なる点について説明する。
【0062】
図示はしないが、外部ネットワーク20には情報センタが接続されており、この情報センタは、多数の車両から送信されるプローブ情報を受信し、蓄積記憶(更新)するようになっている。このとき、多数の車両から送信されるプローブ情報には、例えば各車両の位置や時刻のデータと共に、その地点における最新の交通情報(渋滞、事故、工事、車線規制、交通規制などの情報)や最新の天候情報(天候、風向き、路面状況などの情報)のデータを含んでいる。従って、制御装置2が、携帯電話機18及び車載通信機19などと共に、プローブ情報取得手段として機能を果たす。尚、制御装置2は、情報センタに対してプローブ情報を送信する機能も有する。
【0063】
本実施例では、走行予定に基づく自車の実際の走行時において、制御装置2は、携帯電話機18又は車載通信機19を用いた通信により、外部ネットワーク20を介して前記情報センタから、必要なプローブ情報を収集する。この場合、プローブ情報として、予定の走行経路を先行する他車両(自車の現在位置から例えば1km先、3km先、5km先、10km先など)から、走行経路に関する渋滞情報(各車両の速度や、渋滞距離、渋滞通過時間などの情報)及び走行経路に沿う天候情報(各車両のワイパの作動状態や、雨滴センサ、日射センサ等の出力などの情報)が取得される。
【0064】
そして、制御装置2は、必要電力量aの予測及び発電電力量bの予測に関して変動がないかどうかを監視するにあたって、取得したプローブ情報により、実際の渋滞情報及び実際の天候情報の補完を行うように構成されている。即ち、図4のフローチャートに示すように、バッテリ3の現在の残存電力量の情報が収集され(ステップS11)、予定する走行経路付近に関する気象庁等からの天候情報が収集された(ステップS12)後、ステップS31にて、天候に関するプローブ情報が収集されて天候情報の補完が行なわれる。
【0065】
そして、道路交通情報センタから予定する走行経路に関する渋滞情報が収集された(ステップS13)後、ステップS32にて、渋滞に関するプローブ情報が収集されて渋滞情報の補完が行なわれる。この後、ステップS14にて、上記ステップS31で補完した天候情報に基づいて、車両の現在位置から目的地までに関する太陽電池5の発電電力量bの計算(予測)が行なわれる。ステップS15では、上記ステップS32で補完した渋滞情報(道路交通情報)に基づいて、車両の現在位置から目的地に到達するまでに必要と予測される必要電力量aの計算(予測)が行なわれる。
【0066】
この場合、ステップS31にて、プローブ情報により天候情報を補完することによって、突然雨が降ってきたがすぐに止むいわゆる通り雨など、短時間で天気が変化するような場合にも容易に対応できることは勿論、気象庁ではカバーしきれない細かな限定地域にも対応することができる。例えば、数km四方程度のスポット的な地域で、短時間で天候が変りやすいところや、天気の切れ目が存在しやすい傾向にある地域などにあっては、信頼度のランクを下げる等によって対応することができる。
【0067】
また、ステップS32にて、プローブ情報により渋滞情報を補完することによって、より現実に対応した渋滞情報を得ることができ、渋滞の距離(区間)やその区間の通過に要する時間等に関する高精度の情報を得ることができる。この結果、ステップS14における太陽電池5の発電電力量bの予測、及び、ステップS15における必要電力量aの予測を、現実に即したより緻密な計算によって行うことができ、それらの計算により高い信頼性が得られる。尚、ステップS16以降の処理は、上記第1の実施例(図3)と同様であるため、説明を省略する。
【0068】
このような第2の実施例によれば、上記第1の実施例と同様に、太陽電池5を搭載した電気自動車における走行用モータの電源となるバッテリ3を充電するに際し、バッテリ3に対する外部電源からの充電量を必要最小限に抑えることができ、充電コスト及び充電時間の節約を図ることができるという優れた効果を得ることができる。そして、実際の電気自動車の走行時に、必要電力量aの予測及び発電電力量bの予測に関して変動がないかどうかを常に監視するにあたり、プローブ情報に基づいて、渋滞情報及び天候情報を補完するようにしたので、必要電力量a及び発電電力量bの計算をより緻密に行うことができるというメリットを得ることができる。
【0069】
なお、上記ステップ31においては、天候が不安定な限定地域が判明した場合、その地域の天候信頼度のランクをさらに下げるようにしていたが、さらにステップ32を設けたために、次のような天候情報の補完を行うようにすることもできる。
【0070】
たとえば、天候が変わりやすい限定地域に、渋滞などによって長期間(所定時間以上)留まらざるを得ないことが事前にわかった場合には天候の信頼度のランクを下げるが、逆に、その限定地域を比較的短時間で通過できるとわかった場合にはあえて天候の信頼度のランクを下げずに維持するようにしてもよい。つまり、天候が不安定な場所に長期間滞在可能性が高いことが事前にあきらかになれば、その間の発電電力量の予測は重要である。ここで発電電力量を万一誤って実際より多く見積もってしまえば、必要電力量が増加した場合に予期しないバッテリ切れをきたす恐れもある。そこで、信頼度のランクを下げることで、こうした事態を回避することができる。
【0071】
一方、天候が不安定な場所であっても短時間で通過できる場合には、その間の発電電力量の予測はある程度精度が下がったとしても大きな影響はない。そこで、信頼度のランクを下げないのである。煩雑な計算処理を少しでも低減でき、システムの高速化、簡素化につながる。すなわち、天候が不安定な限定地域を走行する場合に、渋滞情報を加味し、その限定地域での滞在時間の長さに応じ、天候の信頼度を設定するようにしてもよい。このようにすれば、煩雑な計算処理をなるべく低減しつつ、必要な電力量を精度よく予測できるようになる。
【0072】
尚、上記各実施例では特に説明しなかったが、本発明においては、走行経路を走行する際に必要と予測されるバッテリ3の必要電力量aを計算するにあたり、ユーザが嗜好する車載機器の使用態様に基づき、当該車載機器において消費すると予測されるバッテリ3の電力を加味して計算を行うことができる。これには普段のユーザの車載機器の使用状態をその消費電力量とともに記憶し、活用するようにすればよい。つまりたとえば、そのときの気温、天候、時間帯、混雑度合いなどの環境により、車載機器(エアコン、オーディオなど)の使用状況すなわち消費電力量は異なるので、それら環境と消費電力量の実績を紐付けて記憶しておく。そして、それら過去の環境と、現在の環境を比較し、類似の環境における過去の消費電力量を予測に使用するのである。これによれば、バッテリ3の必要電力量aの計算を、より緻密に行うことができる。これに加えて、特にユーザの嗜好が車載機器の電力消費量が多いものである場合には、車載機器の設定に関する調整により、電力消費量を抑える効果が大きいものとなる。
【0073】
また、上記各実施例では、走行予定に基づく実際の電動車両の走行時において、バッテリ3の必要電力量a及び太陽電池5の発電電力量bの双方について変動がないかどうかを監視するように構成したが、いずれか一方について監視を行う構成であっても良い。上記各実施例では、バッテリ3の電力不足により目的地まで到達できないと判断された場合に、最寄の充電設備を探索するようにしたが(ステップS20)、予め走行経路又はその近傍の充電設備を探索し、記憶しておき、目的地まで到達できないと判断された際に、到達可能な充電設備を案内するような構成としても良い。
【0074】
さらには、上記各実施例では、目的地までの推奨する走行経路を、制御装置2が計算するように構成したが、外部の経路計算センタにおいて経路計算を行い、そのデータを通信によって取得するようにしたいわゆるセンタ計算型のナビゲーションシステムであっても良い。上記したように、ユーザが、車載操作装置でなく、外部のパソコンや携帯端末を用いて走行予定を入力し、その走行予定のデータを通信により取得するように構成することもできる。その他、本発明は、電気自動車に限らず、外部電源からのバッテリへの充電が可能ないわゆるプラグインハイブリッド車にも適用することができる等、要旨を逸脱しない範囲内で適宜変更して実施し得るものである。
【符号の説明】
【0075】
図面中、1は充電制御システム、2は制御装置(経路情報取得手段、必要電力計算手段、発電量予測手段、充電実行手段、監視手段、判断手段、充電設備探索手段)、3はバッテリ、4は充電用コネクタ、5は太陽電池、6は充電管理ECU、9は操作スイッチ群、11は表示装置(報知手段、案内手段)、18は携帯電話機(天候情報取得手段、プローブ情報取得手段)、19は車載通信機(天候情報取得手段、プローブ情報取得手段)、20は外部ネットワーク、26は遠隔操作デバイス(走行予定取得手段)を示す。
【特許請求の範囲】
【請求項1】
走行用モータと、この走行用モータの電源となる充電可能なバッテリと、走行中における発電が可能な太陽電池とを備える電動車両における、前記バッテリに対する外部電源による充電及び前記太陽電池の発電電力による充電を制御する電動車両の充電制御システムであって、
ユーザが入力した前記電動車両を走行させる予定の日時及び目的地を含んだ走行予定データを取得する走行予定取得手段と、
前記走行予定データにおける目的地までの走行経路を取得する経路情報取得手段と、
前記走行経路を走行する際に必要と予測される前記バッテリの必要電力量aを計算する必要電力計算手段と、
前記走行予定データの走行時間帯における前記走行経路付近の天候情報を取得する天候情報取得手段と、
前記走行時間帯に前記走行経路を走行した際の前記太陽電池の発電電力量bを、前記天候情報に応じた発電効率を用いて予測する発電量予測手段と、
前記バッテリの残存電力量c及び前記太陽電池の発電電力量bから、前記バッテリの必要電力量aを得るために要する充電電力量dを求め、前記走行予定の日時に至る前までに前記外部電源から充電させる充電実行手段とを備えることを特徴とする電動車両の充電制御システム。
【請求項2】
前記天候情報取得手段は、前記天候情報と共に当該天候情報の信頼度を取得し、
前記発電量予測手段は、前記太陽電池の発電電力量bを、前記天候情報の信頼度を考慮して予測することを特徴とする請求項1記載の電動車両の充電制御システム。
【請求項3】
前記必要電力計算手段は、ユーザが嗜好する車載機器の使用態様に基づき、当該車載機器において消費すると予測される前記バッテリの電力を加味して、前記バッテリの必要電力量aを計算することを特徴とする請求項1又は2記載の電動車両の充電制御システム。
【請求項4】
前記走行予定に基づく実際の電動車両の走行時において、前記必要電力量aの予測及び前記発電電力量bの予測の一方又は双方に関して変動がないかどうかを常に監視する監視手段を備えることを特徴とする請求項1ないし3のいずれかに記載の電動車両の充電制御システム。
【請求項5】
前記監視手段は、前記走行経路の実際の渋滞情報に基づいて、前記バッテリの必要電力量aを再計算する、及び/又は、前記走行経路に沿う実際の天候情報に基づいて、前記太陽電池の発電電力量bを再計算することを特徴とする請求項4記載の電動車両の充電制御システム。
【請求項6】
前記走行経路を先行する他車両からのプローブ情報を取得するプローブ情報取得手段を備え、
前記監視手段は、前記プローブ情報に基づいて、前記走行経路の実際の渋滞情報及び/又は前記走行経路に沿う実際の天候情報を補完することを特徴とする請求項5記載の電動車両の充電制御システム。
【請求項7】
前記走行予定に基づく実際の電動車両の走行時において、目的地に到達するまでに前記バッテリの電力量が不足するかどうかを判断する判断手段と、
この判断手段が電力量の不足が発生すると判断したときに、ユーザに対して車載機器の電力消費量を抑えるような調整操作を促す報知手段とを備えることを特徴とする請求項4ないし6のいずれかに記載の電動車両の充電制御システム。
【請求項8】
前記走行経路に沿う或いは近傍の充電可能な充電設備を探索する充電設備探索手段と、
前記走行予定に基づく実際の電動車両の走行時において、目的地に到達するまでに前記バッテリの電力量が不足するかどうかを判断する判断手段と、
この判断手段が電力量の不足が発生すると判断したときに、前記充電設備探索手段により探索された充電設備に向うように案内する案内手段とを備えることを特徴とする請求項4ないし7のいずれかに記載の電動車両の充電制御システム。
【請求項1】
走行用モータと、この走行用モータの電源となる充電可能なバッテリと、走行中における発電が可能な太陽電池とを備える電動車両における、前記バッテリに対する外部電源による充電及び前記太陽電池の発電電力による充電を制御する電動車両の充電制御システムであって、
ユーザが入力した前記電動車両を走行させる予定の日時及び目的地を含んだ走行予定データを取得する走行予定取得手段と、
前記走行予定データにおける目的地までの走行経路を取得する経路情報取得手段と、
前記走行経路を走行する際に必要と予測される前記バッテリの必要電力量aを計算する必要電力計算手段と、
前記走行予定データの走行時間帯における前記走行経路付近の天候情報を取得する天候情報取得手段と、
前記走行時間帯に前記走行経路を走行した際の前記太陽電池の発電電力量bを、前記天候情報に応じた発電効率を用いて予測する発電量予測手段と、
前記バッテリの残存電力量c及び前記太陽電池の発電電力量bから、前記バッテリの必要電力量aを得るために要する充電電力量dを求め、前記走行予定の日時に至る前までに前記外部電源から充電させる充電実行手段とを備えることを特徴とする電動車両の充電制御システム。
【請求項2】
前記天候情報取得手段は、前記天候情報と共に当該天候情報の信頼度を取得し、
前記発電量予測手段は、前記太陽電池の発電電力量bを、前記天候情報の信頼度を考慮して予測することを特徴とする請求項1記載の電動車両の充電制御システム。
【請求項3】
前記必要電力計算手段は、ユーザが嗜好する車載機器の使用態様に基づき、当該車載機器において消費すると予測される前記バッテリの電力を加味して、前記バッテリの必要電力量aを計算することを特徴とする請求項1又は2記載の電動車両の充電制御システム。
【請求項4】
前記走行予定に基づく実際の電動車両の走行時において、前記必要電力量aの予測及び前記発電電力量bの予測の一方又は双方に関して変動がないかどうかを常に監視する監視手段を備えることを特徴とする請求項1ないし3のいずれかに記載の電動車両の充電制御システム。
【請求項5】
前記監視手段は、前記走行経路の実際の渋滞情報に基づいて、前記バッテリの必要電力量aを再計算する、及び/又は、前記走行経路に沿う実際の天候情報に基づいて、前記太陽電池の発電電力量bを再計算することを特徴とする請求項4記載の電動車両の充電制御システム。
【請求項6】
前記走行経路を先行する他車両からのプローブ情報を取得するプローブ情報取得手段を備え、
前記監視手段は、前記プローブ情報に基づいて、前記走行経路の実際の渋滞情報及び/又は前記走行経路に沿う実際の天候情報を補完することを特徴とする請求項5記載の電動車両の充電制御システム。
【請求項7】
前記走行予定に基づく実際の電動車両の走行時において、目的地に到達するまでに前記バッテリの電力量が不足するかどうかを判断する判断手段と、
この判断手段が電力量の不足が発生すると判断したときに、ユーザに対して車載機器の電力消費量を抑えるような調整操作を促す報知手段とを備えることを特徴とする請求項4ないし6のいずれかに記載の電動車両の充電制御システム。
【請求項8】
前記走行経路に沿う或いは近傍の充電可能な充電設備を探索する充電設備探索手段と、
前記走行予定に基づく実際の電動車両の走行時において、目的地に到達するまでに前記バッテリの電力量が不足するかどうかを判断する判断手段と、
この判断手段が電力量の不足が発生すると判断したときに、前記充電設備探索手段により探索された充電設備に向うように案内する案内手段とを備えることを特徴とする請求項4ないし7のいずれかに記載の電動車両の充電制御システム。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2013−46494(P2013−46494A)
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願番号】特願2011−182639(P2011−182639)
【出願日】平成23年8月24日(2011.8.24)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願日】平成23年8月24日(2011.8.24)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]