
電動車両の駆動システムの制御装置および制御方法
【課題】複数の駆動輪とモータユニットを備え、1つのモータユニットで異常が生じても、複数の駆動輪の各々の動作状態を一致させて電動車両の挙動を安定化させる。
【解決手段】電動車両の駆動システムの制御装置は、複数の駆動モータ31の各目標トルク指令値を運転者操作と車両挙動に応じて演算する目標トルク演算手段32、目標トルク演算手段から出力された各指令値に基づいて複数の駆動モータの各々を制御するモータ制御手段33、複数の駆動モータあるいは複数の駆動モータの駆動経路のうち少なくともいずれか1つに異常が発生したときに異常を検知する異常検知手段34、検知された駆動モータあるいは駆動モータの駆動経路に対応する駆動モータの動作状態を判別する動作状態判別手段35、動作状態判別手段により判別された駆動モータの動作状態に合わせて他の駆動モータの動作状態を制御する同期制御手段36とを備える。
【解決手段】電動車両の駆動システムの制御装置は、複数の駆動モータ31の各目標トルク指令値を運転者操作と車両挙動に応じて演算する目標トルク演算手段32、目標トルク演算手段から出力された各指令値に基づいて複数の駆動モータの各々を制御するモータ制御手段33、複数の駆動モータあるいは複数の駆動モータの駆動経路のうち少なくともいずれか1つに異常が発生したときに異常を検知する異常検知手段34、検知された駆動モータあるいは駆動モータの駆動経路に対応する駆動モータの動作状態を判別する動作状態判別手段35、動作状態判別手段により判別された駆動モータの動作状態に合わせて他の駆動モータの動作状態を制御する同期制御手段36とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電動車両の駆動システムの制御装置および制御方法に関し、特に、複数のモータユニットを備えた電動車両において当該電動車両を駆動する駆動システムで不具合が生じたときに車両の挙動を安定化する適切な制御を行う電動車両の駆動システムの制御装置および制御方法に関する。
【背景技術】
【0002】
複数のモータユニットを備えた電動車両においていずれかのモータユニットが故障したときにも走行安定性を保つ技術が知られている(特許文献1)。特許文献1に記載された電気自動車では2以上の駆動用車輪の各々にモータユニットを装備している。各モータユニットは、通常、駆動用のモータ(電動機)と、当該駆動モータを駆動する電力用電気機器(パワーデバイス等)と、当該電力用電気機器の動作を制御するコントローラとから構成されている。電力用電気機器とコントローラは、駆動モータに対しては、ドライブユニットを形成している。
【0003】
特許文献1に記載された電気自動車の駆動制御装置によれば、左右の駆動輪のそれぞれをモータユニット(駆動モータとドライブユニット)によって独立に駆動する電気自動車において、2つのモータユニットのいずれか一方に不具合(または異常)が生じたとき、不具合が生じていない他方のモータユニットにおける駆動モータの出力を低下させるように制御を行う。
【特許文献1】特開2006−333603号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
上記従来技術の電気自動車の駆動制御装置では、例えば対になった左右の駆動輪の各々の駆動モータのためのドライブユニット等のうちの一方が故障であると判定されたとしても、故障の原因によっては故障している側の駆動モータは一定のトルクを発生して回転し続けている可能性がある。この場合に、他方の故障していない側の駆動モータの出力トルクを例えば0に近い値に低下させると、左右の駆動輪の回転数やトルクが異なってしまうので、車両の挙動が不安定になり、運転者の操作に違和感を与えるおそれがある。
【0005】
また複数のモータユニットを用いて電動車両を駆動する駆動システムでは、一般的に、車両の挙動(例えばヨーレートセンサ等)、操舵装置からの入力(例えばステアリング舵角等)、他の車両制御ユニット(ABSやTCS等)からの入力に応じて、それぞれのモータユニットに適切な出力を指示する車両制御装置を用いる。実際、上記従来技術でも、当該車両制御装置がトルク指示値をモータユニットのドライブユニットへ出力している。すなわち、車両の挙動を決めているのは車両制御装置である。しかしながら、従来技術では、当該車両制御装置の異常時においてどのように対応するかという点については言及されていない。従って、車両制御装置で異常が生じた場合には、車両が安定な状態を保ったまま駆動システムを停止し、運転者の操作良好性を維持し、かつ乗員の安全性を確保することが望まれる。
【0006】
本発明の目的は、上記の課題に鑑み、複数の駆動輪とこれらの駆動輪の動作を独立に制御する複数のモータユニットを備えた電動車両において、当該電動車両を駆動する駆動システムで、1つのモータユニットで異常が生じても、複数の駆動輪の各々の動作状態を一致させて電動車両の挙動を安定化させることができる電動車両の駆動システムの制御装置および制御方法を提供することにある。
【0007】
さらに本発明の他の目的は、モータユニットに含まれるコントローラの目標トルク演算部に異常が発生した場合には、目標トルク演算部から出力される目標トルク指令値の今回値を破棄し、目標トルク指令値の前回値に基づいて駆動モータを制御し、電動車両の挙動を安定化させることができる電動車両の駆動システムの制御装置および制御方法を提供することにある。
【課題を解決するための手段】
【0008】
本発明に係る電動車両の駆動システムの制御装置および制御方法は、上記目的を達成するために、次のように構成される。
【0009】
請求項1に係る電動車両の駆動システムの制御装置は、走行用の複数の駆動モータの各々の目標トルク指令値を、運転者操作と車両挙動のうちの少なくとも一方に応じて所定時間毎に演算する目標トルク演算手段と、目標トルク演算手段から出力された複数の目標トルク指令値に基づいて複数の駆動モータの各々を制御するモータ制御手段とを備え、複数の駆動モータの各々の出力を個別に調整して走行する電動車両の駆動システムであり、複数の駆動モータあるいは複数の駆動モータの駆動経路のうち、少なくともいずれか1つに異常が発生したときに、その異常を検知する異常検知手段と、異常検知手段により検知された駆動モータあるいは駆動モータの駆動経路に対応する駆動モータの動作状態を判別する動作状態判別手段と、動作状態判別手段により判別された駆動モータの動作状態に合わせて他の駆動モータの動作状態を制御する同期制御手段とを備えることを特徴する。
【0010】
請求項2に係る電動車両の駆動システムの制御装置は、上記の構成において、同期制御手段は、動作状態判別手段により判別された駆動モータの動作状態に一致するように他の駆動モータを制御することを特徴とする。
【0011】
請求項3に係る電動車両の駆動システムの制御装置は、上記の構成において、同期制御手段は、複数の駆動モータの各々の回転位相を検出する回転位相検出手段を備え、同期制御手段は、動作状態判別手段により判別された駆動モータに流れる電流を遮断し、その時に電流を遮断した駆動モータに発生するコギングトルクを回転位相検出手段で検出し、他の駆動モータをコギングトルクの位相と一致するように他の駆動モータを制御することを特徴とする。
【0012】
請求項4に係る電動車両の駆動システムの制御装置は、上記の構成において、同期制御手段は、複数の駆動モータの各々の回転位相を検出する回転位相検出手段を備え、複数の駆動モータは前輪を駆動する駆動モータと後輪を駆動する駆動モータとに分け、動作状態判別手段により判別された前記駆動モータに流れる電流を遮断し、その時に電流を遮断した駆動モータに発生するコギングトルクを回転位相検出手段で検出し、前輪を駆動する駆動モータと後輪を駆動する駆動モータのうち、電流を遮断した駆動モータが駆動する車輪と反対側の車輪を駆動する駆動モータをコギングトルクの位相を打ち消すように駆動制御することを特徴とする。
【0013】
請求項5に係る電動車両の駆動システムの制御装置は、上記の構成において、走行用の複数の駆動モータの各々の目標トルク指令値を、運転者操作と車両挙動のうちの少なくとも一方に応じて所定時間毎に演算する目標トルク演算手段と、目標トルク演算手段から出力された複数の目標トルク指令値に基づいて複数の駆動モータの各々を制御するモータ制御手段とを備え、複数の駆動モータの各々の出力を個別に調整して走行する電動車両の駆動システムデあり、さらに、目標トルク演算手段に異常が発生したとき、モータ制御手段に所定時間毎に入力される複数の駆動モータの各々の目標トルク指令値の今回値を破棄し、目標トルク指令値の前回値に基づいて所定時間だけ複数の駆動モータの動作状態を制御する同期制御手段を備えることを特徴する。
【0014】
請求項6に係る電動車両の駆動システムの制御方法は、走行用の複数の駆動モータの各々の目標トルク指令値を、運転者操作と車両挙動のうちの少なくとも一方に応じて所定時間毎に演算する目標トルク演算手段と、目標トルク演算手段から出力された複数の目標トルク指令値に基づいて複数の駆動モータの各々を制御するモータ制御手段とを備え、複数の駆動モータの各々の出力を個別に調整して走行する電動車両の駆動システムに適用され、複数の駆動モータあるいは複数の駆動モータの駆動経路のうち、少なくともいずれか1つに異常が発生したときに、その異常を検知する異常検知ステップと、異常検知ステップにより検知された駆動モータあるいは駆動モータの駆動経路に対応する駆動モータの動作状態を判別する判別ステップと、判別ステップにより判別された駆動モータの動作状態に合わせて他の駆動モータの動作状態を制御するステップとを有する。
【0015】
請求項7に係る電動車両の駆動システムの制御方法は、走行用の複数の駆動モータの各々の目標トルク指令値を、運転者操作と車両挙動のうちの少なくとも一方に応じて所定時間毎に演算する目標トルク演算手段と、目標トルク演算手段から出力された複数の目標トルク指令値に基づいて複数の駆動モータの各々を制御するモータ制御手段とを備え、複数の駆動モータの各々の出力を個別に調整して走行する電動車両の駆動システムに適用され、目標トルク演算手段が異常であるか否かを判定するステップと、目標トルク演算手段に異常が発生したとき、モータ制御手段に所定時間画毎に入力される複数の駆動モータの各々の目標トルク指令値の今回値を破棄し、目標トルク指令値の前回値に基づいて所定時間だけ複数の駆動モータの動作状態を同期させる制御信号を生成するステップと、制御信号によりモータ制御手段を制御するステップと、を有することを特徴する。
【発明の効果】
【0016】
本発明によれば、次の効果を奏する。
【0017】
請求項1または請求項6に係る本発明によれば、異常が発生した駆動モータあるいは異常が発生した駆動経路に対応する駆動モータの動作状態に合わせて他の駆動モータを制御することにより、異常時においても車両の挙動を安定化させることができ、運転者の操作に違和感を与えないという効果が発揮される。
【0018】
請求項2に係る本発明によれば、駆動輪を駆動するモータを制御するモータ制御部のうち異常が発生した1つのモータ制御部に駆動されるモータの駆動状態に合わせて他のモータを駆動制御する。これにより、異常時においても各駆動輪の駆動状態が一致し、車両の挙動を安定化させることができ、運転者の操作に違和感を与えないという効果が発揮される。
【0019】
請求項3に係る本発明によれば、電流を遮断することにより、異常が発生した方のモータが異常な挙動を起こすのを防止することができると共に、電流を遮断したときに発生するコギングトルクの位相に正常な方のモータの回転位相を一致させることで、車両の挙動を安定化させることができ、運転者の操作に違和感を与えないという効果が発揮される。
【0020】
請求項4に係る本発明によれば、異常時においてもコギングトルクを打ち消すことにより車両の前後方向の挙動を安定させることができるため、一層運転者の操作に違和感を与えないという効果がある。
【0021】
請求項5または請求項7に係る本発明によれば、目標トルク演算部に異常が発生した時に出力される目標トルク指令値(今回値)を破棄して、前回値を用いて各モータを制御することにより、異常な値を含む可能性のある今回値を入力として用いることがないため、目標トルク演算部に異常が発生して正常な出力を行えない場合においても、車両の挙動を安定化させることができ、運転者の操作に違和感を与えないという効果が発揮される。
【発明を実施するための最良の形態】
【0022】
以下に、本発明の好適な実施形態(実施例)を添付図面に基づいて説明する。
【0023】
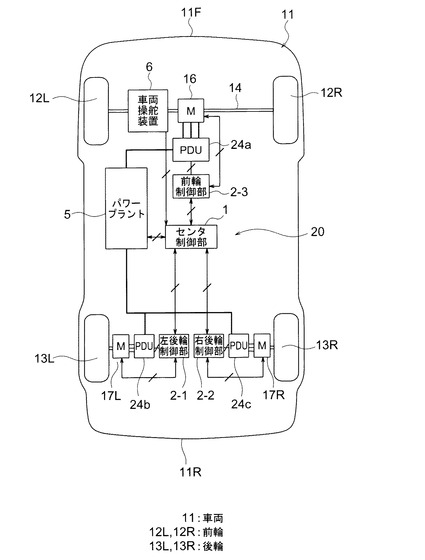
図1に、本発明に係る制御装置が適用される電動車両の駆動システムの模式図を示す。長方形のブロック11は乗用自動車等の車両を示し、図1中で上側部分11Fが車両前部、下側部分11Rが車両後部である。車両11の前部11F側には左右の前輪12L,12Rが設けられ、かつ後部11R側には左右の後輪13L,13Rが設けられている。この車両11は、前輪および後輪の駆動装置として、主に電気モータ(電動機)が用いられる電動車両である。本実施形態に係る電動車両の駆動システムは3モータ車両駆動システムである。
【0024】
制御装置20としては、センタ制御部1、左後輪制御部2−1、右後輪制御部2ー2、前輪制御部2−3が備えられている。電気モータに用いられる制御部としては3つ設けた例を示したが、モータ制御手段の個数は任意の数でもよく、また1つであってもよい。
【0025】
また車両11において、車体のほぼ中央部にパワープラント5と、前輪側に車両操舵装置6とが装備されている。
【0026】
左右の前輪12L,12Rは転舵輪であると共に駆動輪である。前輪の車軸14に対しては上記車両操舵装置6が設けられている。車両操舵装置6は、運転者によって操作される図示しないハンドル等(ステアリングホイール等)の作動状態に応じて、左右の前輪12L,12Rを転舵させる装置である。また前輪12L,12Rに対して、前輪の車軸14上に、前輪に駆動トルクを与えるモータ16が配置されている。左右の前輪12L,12Rは1台の共通のモータ16によって回転駆動される構成となっている。なお図1中、モータ16から前輪12L,12Rへ駆動トルクを伝達するギヤ機構の図示は省略されている。
【0027】
左右の後輪13L,13Rは駆動輪として機能する。左右の後輪13L,13Rの各々には、個別に、駆動用モータ17L,17Rが設けられている。モータ17L,17Rから出力される駆動トルクは、図示しないギヤ機構を介して左右の後輪13L,13Rのそれぞれに与えられる。左右の後輪13L,13Rの各々は独立して設けられたモータ17L,17Rによって回転駆動されるように構成されている。
【0028】
以下の説明では、前輪駆動用モータ16のことを「前モータ16」と記し、左側後輪用モータ17Lのことを「左後モータ17L」と記し、右側後輪用モータ17Rのことを「右後モータ17R」と記す。
【0029】
上記の車両11に設けられた3つのモータ16,17L,17Rに対してこれらのモータの動作を制御する制御装置20が備えられる。制御装置20は、上記のごとく、センタ制御部1と、前モータ16用の前輪制御部2−3と、左後モータ17L用の左後輪制御部2−1と、右後ろモータ17R用の右後輪制御部2−2とから構成されている。これらの制御部1,2−1,2−2,2−3はそれぞれECUで構成されている。
【0030】
センタ制御部1は、車両操舵装置6から出力される前輪の舵角に係る信号、前輪制御部2−3と左後輪制御部2−1と右後輪制御部2−2から出力される車輪の回転速度に係る信号を入力し、これらの信号に基づいて各制御部へのトルク指示値を演算し、前輪制御部2−3、左後輪制御部2−1、右後輪制御部2−3の各々にトルク指示信号を与える。前輪制御部2−3、左後輪制御部2ー1、右後輪制御部2−3の各々は、与えられたトルク指示値を目標値として、各々に接続されているパワーデバイスユニット(PDU)24a,24b,24cに備えられている電流センサの検出値より相電流を取得し、電流フィードバック制御を行う。
【0031】
車両11に設けられた3つのモータ16,17L,17Rの各々と対応する各パワーデバイスユニット24a,24b,24cとを接続する電力線(3相線)には、後述するような構成に基づき接点(コンタクタ)が設けられている。
【0032】
また前モータ16、左後モータ17L、右後モータ17Rの各々には、回転角を検出する回転角センサ(レゾルバ等)が内蔵されており、各モータの制御部2−1,2−1,2−3は当該回転角センサでモータの回転角の計測し、回転角情報を取得している。制御部2−1,2−2,2−3は、一定時間における回転角の変化によりモータの回転角を取得している。
【0033】
また図1に示したパワープラント5は、車両11を動かすエネルギーを貯蔵または生成する装置であり、例えば電池や燃料電池等の電力供給装置である。パワープラント5の出力する電力は直流である。パワープラント5は、3つのパワーデバイスユニット24a,24b,24cの各々に対して電力線を経由して所要の直流電流を供給する。またパワープラント5は、パワーデバイスユニット24a,24b,24cの各々との間の電力線で流れる直流電流の電流値および電圧値を電流センサおよび電圧センサで検出し、センタ制御部21に提供するように構成されている。
【0034】
上記構造を有する電動車両11の駆動システムおよびその制御装置20において、前モータ16と前輪制御部2−3とパワーデバイスユニット24aの組合せ、左後モータ17Lと左後輪制御部2−1とパワーデバイスユニット24bの組合せ、右後モータ17Rと右後輪制御部2−2とパワーデバイス24cの組合せは、それぞれ、「モータユニット」を構成する。
【0035】
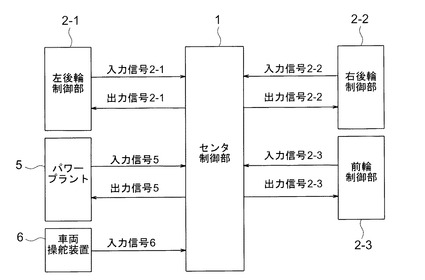
次に、図2を参照して上記制御装置20での信号の送受関係(入力/出力の信号関係:以下「I/O」と記す)について説明する。ここでのI/Oの関係は、センタ制御部1と、前輪制御部2−3、左後輪制御部2−1、右後輪制御部2−2、パワープラント5、車両操舵装置6の各々との間の関係である。
【0036】
センタ制御部1は、通常、車両11の挙動制御を行っている。このとき、例えば左後輪制御部2−1に関する入力信号2−1および出力信号2−1の内容は下記の(表1)に示され、パワープラント5に関する入力信号5および出力信号5の内容は(表2)に示され、車両操舵装置6に関する入力信号6に関する入力信号6の内容は(表3)に示される。右後輪制御2−2および前輪制御部2−3に関する入力信号2−2,2−3、および出力信号2−2,2−3については(表1)で示された内容と同じである。
【0037】
【表1】

【0038】
【表2】
【0039】
【表3】
【0040】
上記の(表1)〜(表3)の各々において「信号の分類」と「信号名」と「説明」が記載されている。センタ制御部1は、例えば(表3)に示すごとく車両操舵装置6よりステアリング装置の舵角(信号名6−i)を入力し、さらに左後輪制御部2−1、右後輪制御部2−2、前輪制御部2−3からモータ回転速(2−1−i等)を入力し、各モータユニットに対して適切なトルク指示値を与える。
【0041】
また上記の表から明らかなように、左後輪制御部2−1、右後輪制御部2−2、前輪制御部2−3、パワープラント5、車両操舵装置6のうちの何かのユニットで異常を検出した場合には、センタ制御部1は、異常を起こしたユニットから「異常通知」を入力し、当該異常を他のユニットに知らせるという機能を有している。
【0042】
次に、前述した「モータユニット」について詳述する。
【0043】
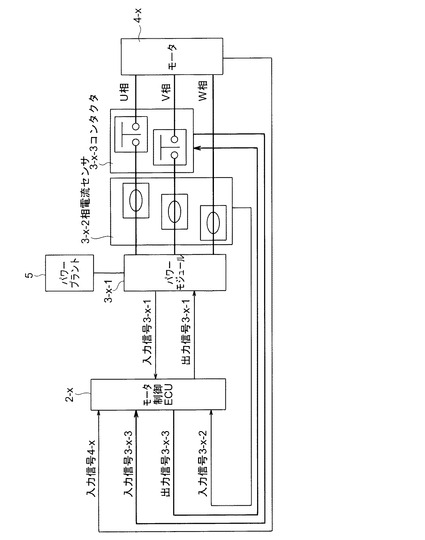
モータユニットは、制御部(モータ制御ECU)を備えたモータ制御ユニットである。図3はモータユニットの一構成例を示している。図3で、ブロック(2−x)はモータ制御ECUであって「x=1,2,3」であり、前述した左後輪制御部2−1、右後輪制御部2−2、前輪制御部2−3のうちのいずれか1つに相当する。またブロック(3−x−1)はパワーモジュールを意味し、ブロック(4−x)はモータを意味している。パワーモジュール(3−x−1)は前述したパワーデバイスユニット24a,24b,24cのうちのいずれか1つに相当し、モータ(4−x)は前述したモータ16,17L,17Rのうちのいずれか1つに相当する。モータ(4−x)は例えば3相同期モータである。モータ制御ECU(2−x)は、モータ(4−x)に対して制御信号(PWM信号)を与える。パワーモジュール(3−x−1)とモータ(4−x)との間には、相電流センサ(3−x−2)とコンタクタ(3−x−3)が配置されている。コンタクタ(3−x−3)はU相とV相のラインに配置されている。
【0044】
図3に示されたモータユニットの構成例では、電流フィードバック制御によりモータを駆動制御している。モータ制御ECU(2−x)には入力信号4−x,3−x−3,3−x−2が入力され、モータ制御ECU(2−x)からコンタクタ(3−x−3)に対して出力信号3−x−3が出力される。またモータ制御ECU(2−x)とパワーモジュール(3−x−1)との間には入力信号3−x−1と出力信号3−x−1が送受される。
【0045】
入力信号3−x−1と出力信号3−x−1の内容は下記の(表4)に示され、入力信号3−x−2の内容は(表5)に示され、入力信号3−x−3と出力信号3−x−3の内容は(表6)に示され、入力信号4−xの内容は(表7)に示されている。
【0046】
【表4】
【0047】
【表5】
【0048】
【表6】
【0049】
【表7】
【0050】
モータ電流ECU(2−x)は、相電流(3−x−2−i,3−x−2−ii,3−x−3−iii)を相電流センサから入力し、ロータの位相(4−x−iを基にモータ制御ECU(2−x)で求める)を回転角センサから入力し、PWM信号(3−x−1−iii)をパワーモジュール(3−x−1)に出力する。パワーモジュール(3−x−1)は、PWM信号に基づきパワープラント5から得た直流を交流に変換して相電流を出力する。パワーモジュール(3−x−1)は、自己の異常診断も行っており、異常が発生したときモータ制御ECU(2−x)に通知(3−x−1−i)する。また相電流が流れる電線のうちU相、V相にはコンタクタ(3−x−3)が挿入されていて、任意にモータ制御ECU(2−x)により任意に切断することが可能である。
【0051】
ここで、以上に説明した車両11の駆動システムにおいて、これを構成するユニットの異常がどのように車両11の挙動に問題を生じるについて説明する。
【0052】
下記の(表8)は、ユニット(前述した数字1,2−1,2−2,2−3,3−1,3−2,3−3,4−1,4−2,4−3,5で示された構成要素)で異常が生じたときの車両11の挙動を示している。車両11の挙動は、「通常走行時に対して異なったヨーが発生するか否か」という観点(Yaw)と、「ブレーキをかけたときと同様な挙動を示すか」という観点(Break)で示されている。表8において、記号「○」は影響大を意味し、記号「×」は影響小を意味し、記号「△」は「どちらとも言える」を意味している。
【0053】
【表8】
【0054】
上記の(表8)に従えば、車両11の挙動に関する問題(第1の課題)として次の点を指摘できる。
【0055】
(1)車両制御装置は車両の挙動を制御するユニットであるため、これが故障を起こすと、車両挙動に影響が生じる。
(2)後輪を駆動するモータユニットの片側が異常になると、重心周りに予期しないモーメントが発生しヨーが変化する。
(3)前輪を駆動するモータユニットが故障すると、前輪のみでブレーキをかけることと同等の車両挙動を示す。直進時は、車両に対して進行方向と同軸に力が働き、旋回時は加えてヨーにも影響が出る。
(4)パワープラントが異常になると、すぐに電力の供給を停止する。そのため、ブレーキをかけたのと同等の挙動を示す。
【0056】
また、異常の状態の可観測性に関する問題(第2の課題)も提起される。本実施形態に基づく対象とする各輪の出力を任意に可変にできる駆動システムの構成では、モータユニットでなく、親装置として機能するセンタ制御部1に異常が生じると、それに対する安全策を講じることが難しいという問題がある。
【0057】
そこで、本実施形態に係る車両の駆動システムにおける制御装置20では、前述した3組のモータユニットの各制御部、すなわち左後輪制御部2−1と右後輪制御部2−2と前輪制御部2−3の各々の制御ロジックを以下のごとくし、上記の第1の課題を解決している。
【0058】
図4〜図6を参照して上記制御ロジックを説明する。
ここで、図4は左後輪制御部2−1の制御ロジックを示し、左後モータ17Lのトルクの制御を示すフローチャートである。図5は右後輪制御部2−2の制御ロジックを示し、右後モータ17Rのトルクの制御を示すフローチャートである。図6は前輪制御部2−3の制御ロジックを示し、前モータ16のトルクの制御を示すフローチャートである。
【0059】
なお、上記で図4のフローチャートと図5のフローチャートは、左右の後輪用の違いだけであって、制御ロジックそのものは同じである。
【0060】
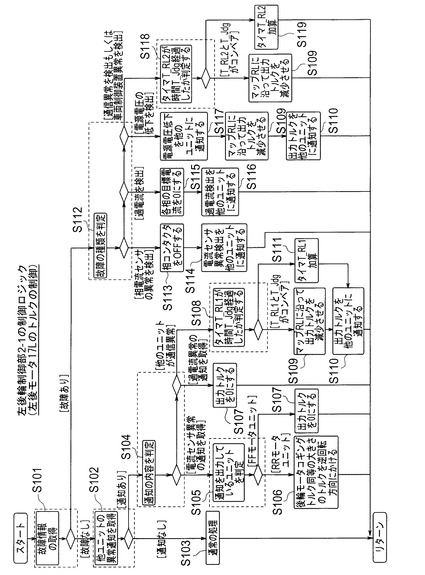
図4に示した左後輪制御部2−1に関する制御ロジックを説明する。この制御ロジックの説明では、第1に「異常を検出した場合」、第2に「他のユニットの異常通知を取得した場合」を、それぞれ、基本的な処理の手順に即して説明する。
【0061】
[異常を検出した場合]
手順(1):
左後輪制御部2−1が異常(故障情報)を検出した場合には(ステップS101)には、異常の種類を判定しかつ異常に合わせて異常の情報を他のモータユニットに通知し(ステップS112)、各モータユニットの出力トルクを変化させる。
手順(2):
左後輪制御部2−1が相電流センサ異常を検出した場合には、相コンタクタをOFFし(ステップS113)、電流センサ異常を他のモータユニットに通知する(ステップS114)。この場合、後輪車軸にかかるトルクは相コンタクタをOFFする直前に対して左後モータ17Lのコギングトルクと同等の大きさ分減じる。
手順(3):
左後輪制御部2−1が過電流を検出した場合には、各相を流れる電流を0にし(ステップS115)、他のモータユニットに過電流異常を通知する(ステップS116)。各相に流れる電流を0にすることにより、左後モータ17Lの出力トルクは0になる。
手順(4):
左後輪制御部2−1が電源電圧の低下を検出した場合には、電源電圧の低下を他のモータユニットに通知し(ステップS117)、トルク係数マップRLに沿って出力トルクを減少させ(ステップS109)、その出力トルクを他のモータユニットに通知する(ステップS110)。
手順(5):
左後輪制御部2−1が自身とセンタ制御部1(車両制御装置)との間に通信異常を検出したか、またはセンタ制御部1の異常を検出した場合には、時間T_Jdg待った後に(ステップS118)、トルク係数マップRLに沿って出力を減少させる(ステップS109)。ここで、時間T_Jdg待つ理由は、他のモータユニットと整合をとるためである。なお、この処理手順では、タイマT_RL2を加算するステップS119が設けられている。
【0062】
[他のユニットの異常通知を取得した場合]
手順(11):
左後輪制御部2−1が他のモータユニットの電流センサ異常の通知を受けた場合(ステップS102)、通知を出力しているモータユニットを判定する(ステップS104)。
通知を出しているのが、自身と対になっている後輪のモータユニットからの通知である場合(ステップS105)、後輪モータのコギングトルクと同等の大きさのトルクをモータの回転方向と反対に出力し(ステップS106)、自身に対になっているモータユニットが相コンタクタを切断したことにより発生したヨーを減少させる。通知を出しているのが前輪のモータユニットである場合には出力トルクを0にし(ステップS107)、後輪モータの出力によって車両挙動に影響が出ないようにする。なお代わりに、ブレーキがかかるようにトルクを出力し、車両を意図的にアンダーステア状態にしてもよい。
手順(12):
左後輪制御部2−1が他のモータユニットの過電流異常の通知を受けた場合には(ステップS104)、出力トルクを0にし(ステップS107)、後輪モータの出力によって車両挙動に影響が出ないようにしている。
手順(13):
左後輪制御部2−1が他のモータユニットの通信異常を受けた場合には、時間T_Jdg待った後に(ステップS108)、トルク係数マップRLに沿って出力を減少させる(ステップS109)。ここで、時間T_Jdg待つ理由は、他のモータユニットと整合をとるためである。なお、この処理手順では、タイマT_RL1を加算するステップS111が設けられている。また出力トルクを他のモータユニットに通知するステップS110を有している。
【0063】
上記において、ステップS102で「通知なし」と判定された場合には通常の処理(ステップS103)が実行される。
【0064】
なお図4で示したフローチャートで、ステップS107,S109,S110については同じ処理内容に関して複数箇所で用いている。
【0065】
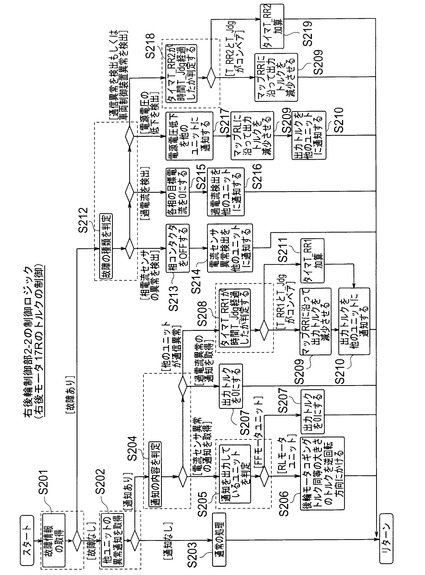
図4では左後輪制御部2−1に関する制御ロジックを説明したが、図5に示した右後輪制御部2−2に関する制御ロジックもまったく同じである。図5のフローチャートにおいて、ステップS201〜S219は前述のステップS101〜S219にそれぞれ対応している。
【0066】
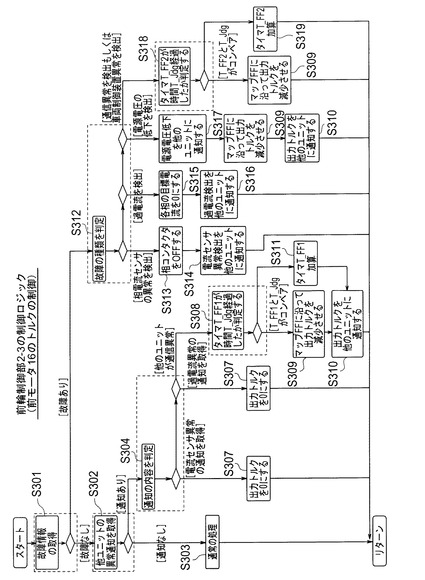
次に、図6を参照して前輪制御部2−3に関する制御ロジックを説明する。この制御ロジックの説明でも、第1に「異常を検出した場合」、第2に「他のユニットの異常通知を取得した場合」を、それぞれ、基本的な処理の手順に即して説明する。
【0067】
[異常を検出した場合]
手順(31):
前輪制御部2−3が異常(故障情報)を検出した場合には(ステップS301)には、異常の種類を判定しかつ異常に合わせて異常の情報を他のモータユニットに通知し(ステップS312)、各モータユニットの出力トルクを変化させる。
手順(32):
前輪制御部2−3が相電流センサ異常を検出した場合には、相コンタクタをOFFし(ステップS313)、電流センサ異常を他のモータユニットに通知する(ステップS314)。この場合、前輪車軸にかかるトルクは相コンタクタをOFFする直前に対して前モータ16のコギングトルクと同等の大きさ分減じる。
手順(33):
前輪制御部2−3が過電流を検出した場合には、各相を流れる電流を0にし(ステップS315)、他のモータユニットに過電流異常を通知する(ステップS316)。各相に流れる電流を0にすることにより、前モータ16の出力トルクは0になる。
手順(34):
前輪制御部2−3が電源電圧の低下を検出した場合には、電源電圧の低下を他のモータユニットに通知し(ステップS317)、トルク係数マップFFに沿って出力トルクを減少させ(ステップS309)、その出力トルクを他のモータユニットに通知する(ステップS310)。
手順(35):
前輪制御部2−3が自身とセンタ制御部1(車両制御装置)との間に通信異常を検出したか、またはセンタ制御部1の異常を検出した場合には、時間T_Jdg待った後に(ステップS318)、トルク係数マップFFに沿って出力を減少させる(ステップS309)。ここで、時間T_Jdg待つ理由は、他のモータユニットと整合をとるためである。なお、この処理手順では、タイマT_FF2を加算するステップS319が設けられている。
【0068】
[他のユニットの異常通知を取得した場合]
手順(41):
前輪制御部2−3が他のモータユニットの電流センサ異常の通知を受けた場合(ステップS302、ステップS304)、出力トルクを0にする(ステップS307)。これによって前モータ16の出力によって車両挙動に影響が出ないようにする。なお代わりに、一定時間加速方向にトルクを出力し、車両を意図的にアンダーステア状態にしてもよい。
手順(42):
前輪制御部2−3が他のモータユニットの過電流異常の通知を受けた場合には(ステップS304)、出力トルクを0にし(ステップS307)、前モータ16の出力によって車両挙動に影響が出ないようにしている。
手順(43):
前輪制御部2−3が他のモータユニットの通信異常を受けた場合には、時間T_Jdg待った後に(ステップS108)、トルク係数マップFFに沿って出力を減少させる(ステップS309)。ここで、時間T_Jdg待つ理由は、他のモータユニットと整合をとるためである。なお、この処理手順では、タイマT_FF1を加算するステップS311が設けられている。また出力トルクを他のモータユニットに通知するステップS310を有している。
【0069】
上記において、ステップS302で「通知なし」と判定された場合には通常の処理(ステップS303)が実行される。
【0070】
なお図6で示したフローチャートで、ステップS307,S309,S310については同じ処理内容に関して複数箇所で用いている。
【0071】
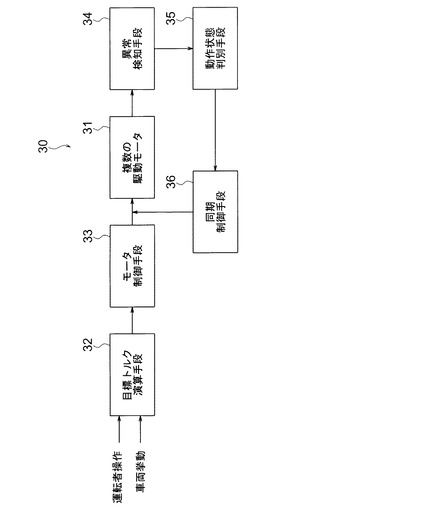
図4〜図6を参照して説明された上記の各フローチャートに基づく制御ロジックを含む装置の基本的構成を図7に示す。この構成は、電動車両の駆動システムの制御装置を構築している。
【0072】
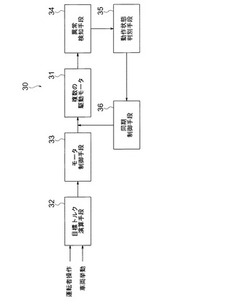
この電動車両の駆動システムの制御装置30は、走行用の複数の駆動モータ31の各々の目標トルク指令値を、運転者操作と車両挙動のうちの少なくとも一方に応じて所定時間毎に演算する目標トルク演算手段32と、この目標トルク演算手段32から出力された複数の目標トルク指令値に基づいて複数の駆動モータ31の各々を制御するモータ制御手段33とを備え、複数の駆動モータ31の各々の出力を個別に調整して走行する電動車両の駆動システムに適用される。上記の複数の駆動モータ31は、前述した前モータ16、左後モータ17L、右後モータ17Rを含む。また上記のモータ制御手段33は、例えば前述した左後輪制御部2−1、右後輪制御部2−2、前輪制御部2−3を含む。さらに制御装置30は、さらに、複数の駆動モータ31あるいは複数の駆動モータの駆動経路のうち、少なくともいずれか1つに異常が発生したときに、その異常を検知する異常検知手段34と、異常検知手段34により検知された駆動モータあるいは駆動モータの駆動経路に対応する駆動モータの動作状態を判別する動作状態判別手段35と、動作状態判別手段35により判別された駆動モータの動作状態に合わせて他の駆動モータの動作状態を制御する同期制御手段36とを備える。
【0073】
上記において、動作状態判別手段35で判別しかつ同期制御手段36で制御する駆動モータ31の動作状態は、例えば、モータの出力トルク、回転数、回転位相、モータに入力される電流値、電圧値等のいずれかにより定められる。また駆動モータの駆動経路としては、電池や燃料電池等のパワープラント5からの電流供給経路、またパワープラント5からの電流および電圧値を計測するセンサ、モータに出力される電流を検知する電流センサや、モータの回転角を検出する回転角センサ、そしてそれらの情報を伝達する通信線が含まれる。
【0074】
図7に示された構成において、モータ制御手段33の個数は複数であっても、1つであってもよい。さらに、異常検知手段34、動作状態判別手段35、同期制御手段36は、モータ制御手段33を構成する装置に含まれてもよく、または各々を独立の装置として設けることもできる。
【0075】
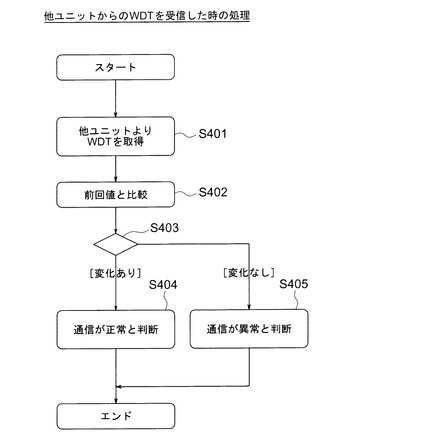
次に、図8を参照して、各モータユニットからのウォッチドッグタイマ(WDT)を受信したときの処理内容を説明する。この処理内容は、車両制御装置(センタ制御部1等)の異常、通信異常を検出する手法を提供し前述の第2の課題を解決しようとするものである。
【0076】
図8のフローチャートで、通信異常を検出するロジックは、常に定期的に実行されるため、なるべく簡単な方法が採用される。
【0077】
各モータユニットはWDTを定期的に他のモータユニットに向けて送信する。従って、他のモータユニットは、WDTの値を定期的に取得し(ステップS401)、今回値を前回値と比較する(ステップS402)。判定ステップS403ではWDTの値の変化が判定され、変化があれば通信が正常と判断され(ステップS404)、変化がなければ通信が異常と判定される(ステップS405)。つまり、WDTの更新が止まったことを条件にモータユニットが通信異常になっていることを検出する。各モータユニットは、通信異常を検出したとき、前述した通りの処理ステップを実行する。
【0078】
前述の実施形態で説明した「トルク係数マップ」は実験的に求められる。決め方の一例は次の通りである。
【0079】
第1に、車両挙動の物理値(ヨーなど)の許容できる大きさを決める。第2に、一定条件下で走行中に任意のMCU(Motor Control Unit)の出力を任意のパターンで減少させる。第3に、物理値が許容範囲内に入っているうち、最もトルクの減少が早いパターンを正規化したものをトルク係数マップとする。
【0080】
以上の実施形態で説明された構成、形状、大きさおよび配置関係については本発明が理解・実施できる程度に概略的に示したものにすぎず、また数値および各構成の組成(材質)については例示にすぎない。従って本発明は、説明された実施形態に限定されるものではなく、特許請求の範囲に示される技術的思想の範囲を逸脱しない限り様々な形態に変更することができる。
【産業上の利用可能性】
【0081】
本発明は、例えば3つのモータを備えて走行駆動される電動乗用自動車等において1つのモータまたはモータ駆動装置が異常状態であっても他のモータの駆動状態を一致させて車両の挙動を安定化させるのに利用される。
【図面の簡単な説明】
【0082】
【図1】本発明に係る制御装置が適用される電動車両の駆動システムの平面的な模式図である。
【図2】車両制御装置での信号の送受関係(入力/出力の信号関係:I/O関係)を示すブロック図である。
【図3】制御部(モータ制御ECU)を備えたモータユニットの一構成例を示すブロック図である。
【図4】左後輪制御部の制御ロジックを示し、左後モータのトルクの制御を示すフローチャートである。
【図5】右後輪制御部の制御ロジックを示し、右後モータのトルクの制御を示すフローチャートである。
【図6】前輪制御部の制御ロジックを示し、前モータのトルクの制御を示すフローチャートである。
【図7】本実施形態に係る電動車両の駆動システムの制御装置の構成を示すブロック図である。
【図8】各モータユニットからのWDTを受信したときの処理内容を示すフローチャートである。
【符号の説明】
【0083】
1 センタ制御部
2−1,2−2 後輪制御部
2−3 前輪制御部
5 パワープラント
11 車両(電動車両)
12L,12R 前輪
13L,13R 後輪
15 車両操舵装置
16 前モータ
17L,17R 後モータ
24a〜24c パワーデバイスユニット
【技術分野】
【0001】
本発明は、電動車両の駆動システムの制御装置および制御方法に関し、特に、複数のモータユニットを備えた電動車両において当該電動車両を駆動する駆動システムで不具合が生じたときに車両の挙動を安定化する適切な制御を行う電動車両の駆動システムの制御装置および制御方法に関する。
【背景技術】
【0002】
複数のモータユニットを備えた電動車両においていずれかのモータユニットが故障したときにも走行安定性を保つ技術が知られている(特許文献1)。特許文献1に記載された電気自動車では2以上の駆動用車輪の各々にモータユニットを装備している。各モータユニットは、通常、駆動用のモータ(電動機)と、当該駆動モータを駆動する電力用電気機器(パワーデバイス等)と、当該電力用電気機器の動作を制御するコントローラとから構成されている。電力用電気機器とコントローラは、駆動モータに対しては、ドライブユニットを形成している。
【0003】
特許文献1に記載された電気自動車の駆動制御装置によれば、左右の駆動輪のそれぞれをモータユニット(駆動モータとドライブユニット)によって独立に駆動する電気自動車において、2つのモータユニットのいずれか一方に不具合(または異常)が生じたとき、不具合が生じていない他方のモータユニットにおける駆動モータの出力を低下させるように制御を行う。
【特許文献1】特開2006−333603号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
上記従来技術の電気自動車の駆動制御装置では、例えば対になった左右の駆動輪の各々の駆動モータのためのドライブユニット等のうちの一方が故障であると判定されたとしても、故障の原因によっては故障している側の駆動モータは一定のトルクを発生して回転し続けている可能性がある。この場合に、他方の故障していない側の駆動モータの出力トルクを例えば0に近い値に低下させると、左右の駆動輪の回転数やトルクが異なってしまうので、車両の挙動が不安定になり、運転者の操作に違和感を与えるおそれがある。
【0005】
また複数のモータユニットを用いて電動車両を駆動する駆動システムでは、一般的に、車両の挙動(例えばヨーレートセンサ等)、操舵装置からの入力(例えばステアリング舵角等)、他の車両制御ユニット(ABSやTCS等)からの入力に応じて、それぞれのモータユニットに適切な出力を指示する車両制御装置を用いる。実際、上記従来技術でも、当該車両制御装置がトルク指示値をモータユニットのドライブユニットへ出力している。すなわち、車両の挙動を決めているのは車両制御装置である。しかしながら、従来技術では、当該車両制御装置の異常時においてどのように対応するかという点については言及されていない。従って、車両制御装置で異常が生じた場合には、車両が安定な状態を保ったまま駆動システムを停止し、運転者の操作良好性を維持し、かつ乗員の安全性を確保することが望まれる。
【0006】
本発明の目的は、上記の課題に鑑み、複数の駆動輪とこれらの駆動輪の動作を独立に制御する複数のモータユニットを備えた電動車両において、当該電動車両を駆動する駆動システムで、1つのモータユニットで異常が生じても、複数の駆動輪の各々の動作状態を一致させて電動車両の挙動を安定化させることができる電動車両の駆動システムの制御装置および制御方法を提供することにある。
【0007】
さらに本発明の他の目的は、モータユニットに含まれるコントローラの目標トルク演算部に異常が発生した場合には、目標トルク演算部から出力される目標トルク指令値の今回値を破棄し、目標トルク指令値の前回値に基づいて駆動モータを制御し、電動車両の挙動を安定化させることができる電動車両の駆動システムの制御装置および制御方法を提供することにある。
【課題を解決するための手段】
【0008】
本発明に係る電動車両の駆動システムの制御装置および制御方法は、上記目的を達成するために、次のように構成される。
【0009】
請求項1に係る電動車両の駆動システムの制御装置は、走行用の複数の駆動モータの各々の目標トルク指令値を、運転者操作と車両挙動のうちの少なくとも一方に応じて所定時間毎に演算する目標トルク演算手段と、目標トルク演算手段から出力された複数の目標トルク指令値に基づいて複数の駆動モータの各々を制御するモータ制御手段とを備え、複数の駆動モータの各々の出力を個別に調整して走行する電動車両の駆動システムであり、複数の駆動モータあるいは複数の駆動モータの駆動経路のうち、少なくともいずれか1つに異常が発生したときに、その異常を検知する異常検知手段と、異常検知手段により検知された駆動モータあるいは駆動モータの駆動経路に対応する駆動モータの動作状態を判別する動作状態判別手段と、動作状態判別手段により判別された駆動モータの動作状態に合わせて他の駆動モータの動作状態を制御する同期制御手段とを備えることを特徴する。
【0010】
請求項2に係る電動車両の駆動システムの制御装置は、上記の構成において、同期制御手段は、動作状態判別手段により判別された駆動モータの動作状態に一致するように他の駆動モータを制御することを特徴とする。
【0011】
請求項3に係る電動車両の駆動システムの制御装置は、上記の構成において、同期制御手段は、複数の駆動モータの各々の回転位相を検出する回転位相検出手段を備え、同期制御手段は、動作状態判別手段により判別された駆動モータに流れる電流を遮断し、その時に電流を遮断した駆動モータに発生するコギングトルクを回転位相検出手段で検出し、他の駆動モータをコギングトルクの位相と一致するように他の駆動モータを制御することを特徴とする。
【0012】
請求項4に係る電動車両の駆動システムの制御装置は、上記の構成において、同期制御手段は、複数の駆動モータの各々の回転位相を検出する回転位相検出手段を備え、複数の駆動モータは前輪を駆動する駆動モータと後輪を駆動する駆動モータとに分け、動作状態判別手段により判別された前記駆動モータに流れる電流を遮断し、その時に電流を遮断した駆動モータに発生するコギングトルクを回転位相検出手段で検出し、前輪を駆動する駆動モータと後輪を駆動する駆動モータのうち、電流を遮断した駆動モータが駆動する車輪と反対側の車輪を駆動する駆動モータをコギングトルクの位相を打ち消すように駆動制御することを特徴とする。
【0013】
請求項5に係る電動車両の駆動システムの制御装置は、上記の構成において、走行用の複数の駆動モータの各々の目標トルク指令値を、運転者操作と車両挙動のうちの少なくとも一方に応じて所定時間毎に演算する目標トルク演算手段と、目標トルク演算手段から出力された複数の目標トルク指令値に基づいて複数の駆動モータの各々を制御するモータ制御手段とを備え、複数の駆動モータの各々の出力を個別に調整して走行する電動車両の駆動システムデあり、さらに、目標トルク演算手段に異常が発生したとき、モータ制御手段に所定時間毎に入力される複数の駆動モータの各々の目標トルク指令値の今回値を破棄し、目標トルク指令値の前回値に基づいて所定時間だけ複数の駆動モータの動作状態を制御する同期制御手段を備えることを特徴する。
【0014】
請求項6に係る電動車両の駆動システムの制御方法は、走行用の複数の駆動モータの各々の目標トルク指令値を、運転者操作と車両挙動のうちの少なくとも一方に応じて所定時間毎に演算する目標トルク演算手段と、目標トルク演算手段から出力された複数の目標トルク指令値に基づいて複数の駆動モータの各々を制御するモータ制御手段とを備え、複数の駆動モータの各々の出力を個別に調整して走行する電動車両の駆動システムに適用され、複数の駆動モータあるいは複数の駆動モータの駆動経路のうち、少なくともいずれか1つに異常が発生したときに、その異常を検知する異常検知ステップと、異常検知ステップにより検知された駆動モータあるいは駆動モータの駆動経路に対応する駆動モータの動作状態を判別する判別ステップと、判別ステップにより判別された駆動モータの動作状態に合わせて他の駆動モータの動作状態を制御するステップとを有する。
【0015】
請求項7に係る電動車両の駆動システムの制御方法は、走行用の複数の駆動モータの各々の目標トルク指令値を、運転者操作と車両挙動のうちの少なくとも一方に応じて所定時間毎に演算する目標トルク演算手段と、目標トルク演算手段から出力された複数の目標トルク指令値に基づいて複数の駆動モータの各々を制御するモータ制御手段とを備え、複数の駆動モータの各々の出力を個別に調整して走行する電動車両の駆動システムに適用され、目標トルク演算手段が異常であるか否かを判定するステップと、目標トルク演算手段に異常が発生したとき、モータ制御手段に所定時間画毎に入力される複数の駆動モータの各々の目標トルク指令値の今回値を破棄し、目標トルク指令値の前回値に基づいて所定時間だけ複数の駆動モータの動作状態を同期させる制御信号を生成するステップと、制御信号によりモータ制御手段を制御するステップと、を有することを特徴する。
【発明の効果】
【0016】
本発明によれば、次の効果を奏する。
【0017】
請求項1または請求項6に係る本発明によれば、異常が発生した駆動モータあるいは異常が発生した駆動経路に対応する駆動モータの動作状態に合わせて他の駆動モータを制御することにより、異常時においても車両の挙動を安定化させることができ、運転者の操作に違和感を与えないという効果が発揮される。
【0018】
請求項2に係る本発明によれば、駆動輪を駆動するモータを制御するモータ制御部のうち異常が発生した1つのモータ制御部に駆動されるモータの駆動状態に合わせて他のモータを駆動制御する。これにより、異常時においても各駆動輪の駆動状態が一致し、車両の挙動を安定化させることができ、運転者の操作に違和感を与えないという効果が発揮される。
【0019】
請求項3に係る本発明によれば、電流を遮断することにより、異常が発生した方のモータが異常な挙動を起こすのを防止することができると共に、電流を遮断したときに発生するコギングトルクの位相に正常な方のモータの回転位相を一致させることで、車両の挙動を安定化させることができ、運転者の操作に違和感を与えないという効果が発揮される。
【0020】
請求項4に係る本発明によれば、異常時においてもコギングトルクを打ち消すことにより車両の前後方向の挙動を安定させることができるため、一層運転者の操作に違和感を与えないという効果がある。
【0021】
請求項5または請求項7に係る本発明によれば、目標トルク演算部に異常が発生した時に出力される目標トルク指令値(今回値)を破棄して、前回値を用いて各モータを制御することにより、異常な値を含む可能性のある今回値を入力として用いることがないため、目標トルク演算部に異常が発生して正常な出力を行えない場合においても、車両の挙動を安定化させることができ、運転者の操作に違和感を与えないという効果が発揮される。
【発明を実施するための最良の形態】
【0022】
以下に、本発明の好適な実施形態(実施例)を添付図面に基づいて説明する。
【0023】
図1に、本発明に係る制御装置が適用される電動車両の駆動システムの模式図を示す。長方形のブロック11は乗用自動車等の車両を示し、図1中で上側部分11Fが車両前部、下側部分11Rが車両後部である。車両11の前部11F側には左右の前輪12L,12Rが設けられ、かつ後部11R側には左右の後輪13L,13Rが設けられている。この車両11は、前輪および後輪の駆動装置として、主に電気モータ(電動機)が用いられる電動車両である。本実施形態に係る電動車両の駆動システムは3モータ車両駆動システムである。
【0024】
制御装置20としては、センタ制御部1、左後輪制御部2−1、右後輪制御部2ー2、前輪制御部2−3が備えられている。電気モータに用いられる制御部としては3つ設けた例を示したが、モータ制御手段の個数は任意の数でもよく、また1つであってもよい。
【0025】
また車両11において、車体のほぼ中央部にパワープラント5と、前輪側に車両操舵装置6とが装備されている。
【0026】
左右の前輪12L,12Rは転舵輪であると共に駆動輪である。前輪の車軸14に対しては上記車両操舵装置6が設けられている。車両操舵装置6は、運転者によって操作される図示しないハンドル等(ステアリングホイール等)の作動状態に応じて、左右の前輪12L,12Rを転舵させる装置である。また前輪12L,12Rに対して、前輪の車軸14上に、前輪に駆動トルクを与えるモータ16が配置されている。左右の前輪12L,12Rは1台の共通のモータ16によって回転駆動される構成となっている。なお図1中、モータ16から前輪12L,12Rへ駆動トルクを伝達するギヤ機構の図示は省略されている。
【0027】
左右の後輪13L,13Rは駆動輪として機能する。左右の後輪13L,13Rの各々には、個別に、駆動用モータ17L,17Rが設けられている。モータ17L,17Rから出力される駆動トルクは、図示しないギヤ機構を介して左右の後輪13L,13Rのそれぞれに与えられる。左右の後輪13L,13Rの各々は独立して設けられたモータ17L,17Rによって回転駆動されるように構成されている。
【0028】
以下の説明では、前輪駆動用モータ16のことを「前モータ16」と記し、左側後輪用モータ17Lのことを「左後モータ17L」と記し、右側後輪用モータ17Rのことを「右後モータ17R」と記す。
【0029】
上記の車両11に設けられた3つのモータ16,17L,17Rに対してこれらのモータの動作を制御する制御装置20が備えられる。制御装置20は、上記のごとく、センタ制御部1と、前モータ16用の前輪制御部2−3と、左後モータ17L用の左後輪制御部2−1と、右後ろモータ17R用の右後輪制御部2−2とから構成されている。これらの制御部1,2−1,2−2,2−3はそれぞれECUで構成されている。
【0030】
センタ制御部1は、車両操舵装置6から出力される前輪の舵角に係る信号、前輪制御部2−3と左後輪制御部2−1と右後輪制御部2−2から出力される車輪の回転速度に係る信号を入力し、これらの信号に基づいて各制御部へのトルク指示値を演算し、前輪制御部2−3、左後輪制御部2−1、右後輪制御部2−3の各々にトルク指示信号を与える。前輪制御部2−3、左後輪制御部2ー1、右後輪制御部2−3の各々は、与えられたトルク指示値を目標値として、各々に接続されているパワーデバイスユニット(PDU)24a,24b,24cに備えられている電流センサの検出値より相電流を取得し、電流フィードバック制御を行う。
【0031】
車両11に設けられた3つのモータ16,17L,17Rの各々と対応する各パワーデバイスユニット24a,24b,24cとを接続する電力線(3相線)には、後述するような構成に基づき接点(コンタクタ)が設けられている。
【0032】
また前モータ16、左後モータ17L、右後モータ17Rの各々には、回転角を検出する回転角センサ(レゾルバ等)が内蔵されており、各モータの制御部2−1,2−1,2−3は当該回転角センサでモータの回転角の計測し、回転角情報を取得している。制御部2−1,2−2,2−3は、一定時間における回転角の変化によりモータの回転角を取得している。
【0033】
また図1に示したパワープラント5は、車両11を動かすエネルギーを貯蔵または生成する装置であり、例えば電池や燃料電池等の電力供給装置である。パワープラント5の出力する電力は直流である。パワープラント5は、3つのパワーデバイスユニット24a,24b,24cの各々に対して電力線を経由して所要の直流電流を供給する。またパワープラント5は、パワーデバイスユニット24a,24b,24cの各々との間の電力線で流れる直流電流の電流値および電圧値を電流センサおよび電圧センサで検出し、センタ制御部21に提供するように構成されている。
【0034】
上記構造を有する電動車両11の駆動システムおよびその制御装置20において、前モータ16と前輪制御部2−3とパワーデバイスユニット24aの組合せ、左後モータ17Lと左後輪制御部2−1とパワーデバイスユニット24bの組合せ、右後モータ17Rと右後輪制御部2−2とパワーデバイス24cの組合せは、それぞれ、「モータユニット」を構成する。
【0035】
次に、図2を参照して上記制御装置20での信号の送受関係(入力/出力の信号関係:以下「I/O」と記す)について説明する。ここでのI/Oの関係は、センタ制御部1と、前輪制御部2−3、左後輪制御部2−1、右後輪制御部2−2、パワープラント5、車両操舵装置6の各々との間の関係である。
【0036】
センタ制御部1は、通常、車両11の挙動制御を行っている。このとき、例えば左後輪制御部2−1に関する入力信号2−1および出力信号2−1の内容は下記の(表1)に示され、パワープラント5に関する入力信号5および出力信号5の内容は(表2)に示され、車両操舵装置6に関する入力信号6に関する入力信号6の内容は(表3)に示される。右後輪制御2−2および前輪制御部2−3に関する入力信号2−2,2−3、および出力信号2−2,2−3については(表1)で示された内容と同じである。
【0037】
【表1】
【0038】
【表2】
【0039】
【表3】
【0040】
上記の(表1)〜(表3)の各々において「信号の分類」と「信号名」と「説明」が記載されている。センタ制御部1は、例えば(表3)に示すごとく車両操舵装置6よりステアリング装置の舵角(信号名6−i)を入力し、さらに左後輪制御部2−1、右後輪制御部2−2、前輪制御部2−3からモータ回転速(2−1−i等)を入力し、各モータユニットに対して適切なトルク指示値を与える。
【0041】
また上記の表から明らかなように、左後輪制御部2−1、右後輪制御部2−2、前輪制御部2−3、パワープラント5、車両操舵装置6のうちの何かのユニットで異常を検出した場合には、センタ制御部1は、異常を起こしたユニットから「異常通知」を入力し、当該異常を他のユニットに知らせるという機能を有している。
【0042】
次に、前述した「モータユニット」について詳述する。
【0043】
モータユニットは、制御部(モータ制御ECU)を備えたモータ制御ユニットである。図3はモータユニットの一構成例を示している。図3で、ブロック(2−x)はモータ制御ECUであって「x=1,2,3」であり、前述した左後輪制御部2−1、右後輪制御部2−2、前輪制御部2−3のうちのいずれか1つに相当する。またブロック(3−x−1)はパワーモジュールを意味し、ブロック(4−x)はモータを意味している。パワーモジュール(3−x−1)は前述したパワーデバイスユニット24a,24b,24cのうちのいずれか1つに相当し、モータ(4−x)は前述したモータ16,17L,17Rのうちのいずれか1つに相当する。モータ(4−x)は例えば3相同期モータである。モータ制御ECU(2−x)は、モータ(4−x)に対して制御信号(PWM信号)を与える。パワーモジュール(3−x−1)とモータ(4−x)との間には、相電流センサ(3−x−2)とコンタクタ(3−x−3)が配置されている。コンタクタ(3−x−3)はU相とV相のラインに配置されている。
【0044】
図3に示されたモータユニットの構成例では、電流フィードバック制御によりモータを駆動制御している。モータ制御ECU(2−x)には入力信号4−x,3−x−3,3−x−2が入力され、モータ制御ECU(2−x)からコンタクタ(3−x−3)に対して出力信号3−x−3が出力される。またモータ制御ECU(2−x)とパワーモジュール(3−x−1)との間には入力信号3−x−1と出力信号3−x−1が送受される。
【0045】
入力信号3−x−1と出力信号3−x−1の内容は下記の(表4)に示され、入力信号3−x−2の内容は(表5)に示され、入力信号3−x−3と出力信号3−x−3の内容は(表6)に示され、入力信号4−xの内容は(表7)に示されている。
【0046】
【表4】
【0047】
【表5】
【0048】
【表6】
【0049】
【表7】
【0050】
モータ電流ECU(2−x)は、相電流(3−x−2−i,3−x−2−ii,3−x−3−iii)を相電流センサから入力し、ロータの位相(4−x−iを基にモータ制御ECU(2−x)で求める)を回転角センサから入力し、PWM信号(3−x−1−iii)をパワーモジュール(3−x−1)に出力する。パワーモジュール(3−x−1)は、PWM信号に基づきパワープラント5から得た直流を交流に変換して相電流を出力する。パワーモジュール(3−x−1)は、自己の異常診断も行っており、異常が発生したときモータ制御ECU(2−x)に通知(3−x−1−i)する。また相電流が流れる電線のうちU相、V相にはコンタクタ(3−x−3)が挿入されていて、任意にモータ制御ECU(2−x)により任意に切断することが可能である。
【0051】
ここで、以上に説明した車両11の駆動システムにおいて、これを構成するユニットの異常がどのように車両11の挙動に問題を生じるについて説明する。
【0052】
下記の(表8)は、ユニット(前述した数字1,2−1,2−2,2−3,3−1,3−2,3−3,4−1,4−2,4−3,5で示された構成要素)で異常が生じたときの車両11の挙動を示している。車両11の挙動は、「通常走行時に対して異なったヨーが発生するか否か」という観点(Yaw)と、「ブレーキをかけたときと同様な挙動を示すか」という観点(Break)で示されている。表8において、記号「○」は影響大を意味し、記号「×」は影響小を意味し、記号「△」は「どちらとも言える」を意味している。
【0053】
【表8】
【0054】
上記の(表8)に従えば、車両11の挙動に関する問題(第1の課題)として次の点を指摘できる。
【0055】
(1)車両制御装置は車両の挙動を制御するユニットであるため、これが故障を起こすと、車両挙動に影響が生じる。
(2)後輪を駆動するモータユニットの片側が異常になると、重心周りに予期しないモーメントが発生しヨーが変化する。
(3)前輪を駆動するモータユニットが故障すると、前輪のみでブレーキをかけることと同等の車両挙動を示す。直進時は、車両に対して進行方向と同軸に力が働き、旋回時は加えてヨーにも影響が出る。
(4)パワープラントが異常になると、すぐに電力の供給を停止する。そのため、ブレーキをかけたのと同等の挙動を示す。
【0056】
また、異常の状態の可観測性に関する問題(第2の課題)も提起される。本実施形態に基づく対象とする各輪の出力を任意に可変にできる駆動システムの構成では、モータユニットでなく、親装置として機能するセンタ制御部1に異常が生じると、それに対する安全策を講じることが難しいという問題がある。
【0057】
そこで、本実施形態に係る車両の駆動システムにおける制御装置20では、前述した3組のモータユニットの各制御部、すなわち左後輪制御部2−1と右後輪制御部2−2と前輪制御部2−3の各々の制御ロジックを以下のごとくし、上記の第1の課題を解決している。
【0058】
図4〜図6を参照して上記制御ロジックを説明する。
ここで、図4は左後輪制御部2−1の制御ロジックを示し、左後モータ17Lのトルクの制御を示すフローチャートである。図5は右後輪制御部2−2の制御ロジックを示し、右後モータ17Rのトルクの制御を示すフローチャートである。図6は前輪制御部2−3の制御ロジックを示し、前モータ16のトルクの制御を示すフローチャートである。
【0059】
なお、上記で図4のフローチャートと図5のフローチャートは、左右の後輪用の違いだけであって、制御ロジックそのものは同じである。
【0060】
図4に示した左後輪制御部2−1に関する制御ロジックを説明する。この制御ロジックの説明では、第1に「異常を検出した場合」、第2に「他のユニットの異常通知を取得した場合」を、それぞれ、基本的な処理の手順に即して説明する。
【0061】
[異常を検出した場合]
手順(1):
左後輪制御部2−1が異常(故障情報)を検出した場合には(ステップS101)には、異常の種類を判定しかつ異常に合わせて異常の情報を他のモータユニットに通知し(ステップS112)、各モータユニットの出力トルクを変化させる。
手順(2):
左後輪制御部2−1が相電流センサ異常を検出した場合には、相コンタクタをOFFし(ステップS113)、電流センサ異常を他のモータユニットに通知する(ステップS114)。この場合、後輪車軸にかかるトルクは相コンタクタをOFFする直前に対して左後モータ17Lのコギングトルクと同等の大きさ分減じる。
手順(3):
左後輪制御部2−1が過電流を検出した場合には、各相を流れる電流を0にし(ステップS115)、他のモータユニットに過電流異常を通知する(ステップS116)。各相に流れる電流を0にすることにより、左後モータ17Lの出力トルクは0になる。
手順(4):
左後輪制御部2−1が電源電圧の低下を検出した場合には、電源電圧の低下を他のモータユニットに通知し(ステップS117)、トルク係数マップRLに沿って出力トルクを減少させ(ステップS109)、その出力トルクを他のモータユニットに通知する(ステップS110)。
手順(5):
左後輪制御部2−1が自身とセンタ制御部1(車両制御装置)との間に通信異常を検出したか、またはセンタ制御部1の異常を検出した場合には、時間T_Jdg待った後に(ステップS118)、トルク係数マップRLに沿って出力を減少させる(ステップS109)。ここで、時間T_Jdg待つ理由は、他のモータユニットと整合をとるためである。なお、この処理手順では、タイマT_RL2を加算するステップS119が設けられている。
【0062】
[他のユニットの異常通知を取得した場合]
手順(11):
左後輪制御部2−1が他のモータユニットの電流センサ異常の通知を受けた場合(ステップS102)、通知を出力しているモータユニットを判定する(ステップS104)。
通知を出しているのが、自身と対になっている後輪のモータユニットからの通知である場合(ステップS105)、後輪モータのコギングトルクと同等の大きさのトルクをモータの回転方向と反対に出力し(ステップS106)、自身に対になっているモータユニットが相コンタクタを切断したことにより発生したヨーを減少させる。通知を出しているのが前輪のモータユニットである場合には出力トルクを0にし(ステップS107)、後輪モータの出力によって車両挙動に影響が出ないようにする。なお代わりに、ブレーキがかかるようにトルクを出力し、車両を意図的にアンダーステア状態にしてもよい。
手順(12):
左後輪制御部2−1が他のモータユニットの過電流異常の通知を受けた場合には(ステップS104)、出力トルクを0にし(ステップS107)、後輪モータの出力によって車両挙動に影響が出ないようにしている。
手順(13):
左後輪制御部2−1が他のモータユニットの通信異常を受けた場合には、時間T_Jdg待った後に(ステップS108)、トルク係数マップRLに沿って出力を減少させる(ステップS109)。ここで、時間T_Jdg待つ理由は、他のモータユニットと整合をとるためである。なお、この処理手順では、タイマT_RL1を加算するステップS111が設けられている。また出力トルクを他のモータユニットに通知するステップS110を有している。
【0063】
上記において、ステップS102で「通知なし」と判定された場合には通常の処理(ステップS103)が実行される。
【0064】
なお図4で示したフローチャートで、ステップS107,S109,S110については同じ処理内容に関して複数箇所で用いている。
【0065】
図4では左後輪制御部2−1に関する制御ロジックを説明したが、図5に示した右後輪制御部2−2に関する制御ロジックもまったく同じである。図5のフローチャートにおいて、ステップS201〜S219は前述のステップS101〜S219にそれぞれ対応している。
【0066】
次に、図6を参照して前輪制御部2−3に関する制御ロジックを説明する。この制御ロジックの説明でも、第1に「異常を検出した場合」、第2に「他のユニットの異常通知を取得した場合」を、それぞれ、基本的な処理の手順に即して説明する。
【0067】
[異常を検出した場合]
手順(31):
前輪制御部2−3が異常(故障情報)を検出した場合には(ステップS301)には、異常の種類を判定しかつ異常に合わせて異常の情報を他のモータユニットに通知し(ステップS312)、各モータユニットの出力トルクを変化させる。
手順(32):
前輪制御部2−3が相電流センサ異常を検出した場合には、相コンタクタをOFFし(ステップS313)、電流センサ異常を他のモータユニットに通知する(ステップS314)。この場合、前輪車軸にかかるトルクは相コンタクタをOFFする直前に対して前モータ16のコギングトルクと同等の大きさ分減じる。
手順(33):
前輪制御部2−3が過電流を検出した場合には、各相を流れる電流を0にし(ステップS315)、他のモータユニットに過電流異常を通知する(ステップS316)。各相に流れる電流を0にすることにより、前モータ16の出力トルクは0になる。
手順(34):
前輪制御部2−3が電源電圧の低下を検出した場合には、電源電圧の低下を他のモータユニットに通知し(ステップS317)、トルク係数マップFFに沿って出力トルクを減少させ(ステップS309)、その出力トルクを他のモータユニットに通知する(ステップS310)。
手順(35):
前輪制御部2−3が自身とセンタ制御部1(車両制御装置)との間に通信異常を検出したか、またはセンタ制御部1の異常を検出した場合には、時間T_Jdg待った後に(ステップS318)、トルク係数マップFFに沿って出力を減少させる(ステップS309)。ここで、時間T_Jdg待つ理由は、他のモータユニットと整合をとるためである。なお、この処理手順では、タイマT_FF2を加算するステップS319が設けられている。
【0068】
[他のユニットの異常通知を取得した場合]
手順(41):
前輪制御部2−3が他のモータユニットの電流センサ異常の通知を受けた場合(ステップS302、ステップS304)、出力トルクを0にする(ステップS307)。これによって前モータ16の出力によって車両挙動に影響が出ないようにする。なお代わりに、一定時間加速方向にトルクを出力し、車両を意図的にアンダーステア状態にしてもよい。
手順(42):
前輪制御部2−3が他のモータユニットの過電流異常の通知を受けた場合には(ステップS304)、出力トルクを0にし(ステップS307)、前モータ16の出力によって車両挙動に影響が出ないようにしている。
手順(43):
前輪制御部2−3が他のモータユニットの通信異常を受けた場合には、時間T_Jdg待った後に(ステップS108)、トルク係数マップFFに沿って出力を減少させる(ステップS309)。ここで、時間T_Jdg待つ理由は、他のモータユニットと整合をとるためである。なお、この処理手順では、タイマT_FF1を加算するステップS311が設けられている。また出力トルクを他のモータユニットに通知するステップS310を有している。
【0069】
上記において、ステップS302で「通知なし」と判定された場合には通常の処理(ステップS303)が実行される。
【0070】
なお図6で示したフローチャートで、ステップS307,S309,S310については同じ処理内容に関して複数箇所で用いている。
【0071】
図4〜図6を参照して説明された上記の各フローチャートに基づく制御ロジックを含む装置の基本的構成を図7に示す。この構成は、電動車両の駆動システムの制御装置を構築している。
【0072】
この電動車両の駆動システムの制御装置30は、走行用の複数の駆動モータ31の各々の目標トルク指令値を、運転者操作と車両挙動のうちの少なくとも一方に応じて所定時間毎に演算する目標トルク演算手段32と、この目標トルク演算手段32から出力された複数の目標トルク指令値に基づいて複数の駆動モータ31の各々を制御するモータ制御手段33とを備え、複数の駆動モータ31の各々の出力を個別に調整して走行する電動車両の駆動システムに適用される。上記の複数の駆動モータ31は、前述した前モータ16、左後モータ17L、右後モータ17Rを含む。また上記のモータ制御手段33は、例えば前述した左後輪制御部2−1、右後輪制御部2−2、前輪制御部2−3を含む。さらに制御装置30は、さらに、複数の駆動モータ31あるいは複数の駆動モータの駆動経路のうち、少なくともいずれか1つに異常が発生したときに、その異常を検知する異常検知手段34と、異常検知手段34により検知された駆動モータあるいは駆動モータの駆動経路に対応する駆動モータの動作状態を判別する動作状態判別手段35と、動作状態判別手段35により判別された駆動モータの動作状態に合わせて他の駆動モータの動作状態を制御する同期制御手段36とを備える。
【0073】
上記において、動作状態判別手段35で判別しかつ同期制御手段36で制御する駆動モータ31の動作状態は、例えば、モータの出力トルク、回転数、回転位相、モータに入力される電流値、電圧値等のいずれかにより定められる。また駆動モータの駆動経路としては、電池や燃料電池等のパワープラント5からの電流供給経路、またパワープラント5からの電流および電圧値を計測するセンサ、モータに出力される電流を検知する電流センサや、モータの回転角を検出する回転角センサ、そしてそれらの情報を伝達する通信線が含まれる。
【0074】
図7に示された構成において、モータ制御手段33の個数は複数であっても、1つであってもよい。さらに、異常検知手段34、動作状態判別手段35、同期制御手段36は、モータ制御手段33を構成する装置に含まれてもよく、または各々を独立の装置として設けることもできる。
【0075】
次に、図8を参照して、各モータユニットからのウォッチドッグタイマ(WDT)を受信したときの処理内容を説明する。この処理内容は、車両制御装置(センタ制御部1等)の異常、通信異常を検出する手法を提供し前述の第2の課題を解決しようとするものである。
【0076】
図8のフローチャートで、通信異常を検出するロジックは、常に定期的に実行されるため、なるべく簡単な方法が採用される。
【0077】
各モータユニットはWDTを定期的に他のモータユニットに向けて送信する。従って、他のモータユニットは、WDTの値を定期的に取得し(ステップS401)、今回値を前回値と比較する(ステップS402)。判定ステップS403ではWDTの値の変化が判定され、変化があれば通信が正常と判断され(ステップS404)、変化がなければ通信が異常と判定される(ステップS405)。つまり、WDTの更新が止まったことを条件にモータユニットが通信異常になっていることを検出する。各モータユニットは、通信異常を検出したとき、前述した通りの処理ステップを実行する。
【0078】
前述の実施形態で説明した「トルク係数マップ」は実験的に求められる。決め方の一例は次の通りである。
【0079】
第1に、車両挙動の物理値(ヨーなど)の許容できる大きさを決める。第2に、一定条件下で走行中に任意のMCU(Motor Control Unit)の出力を任意のパターンで減少させる。第3に、物理値が許容範囲内に入っているうち、最もトルクの減少が早いパターンを正規化したものをトルク係数マップとする。
【0080】
以上の実施形態で説明された構成、形状、大きさおよび配置関係については本発明が理解・実施できる程度に概略的に示したものにすぎず、また数値および各構成の組成(材質)については例示にすぎない。従って本発明は、説明された実施形態に限定されるものではなく、特許請求の範囲に示される技術的思想の範囲を逸脱しない限り様々な形態に変更することができる。
【産業上の利用可能性】
【0081】
本発明は、例えば3つのモータを備えて走行駆動される電動乗用自動車等において1つのモータまたはモータ駆動装置が異常状態であっても他のモータの駆動状態を一致させて車両の挙動を安定化させるのに利用される。
【図面の簡単な説明】
【0082】
【図1】本発明に係る制御装置が適用される電動車両の駆動システムの平面的な模式図である。
【図2】車両制御装置での信号の送受関係(入力/出力の信号関係:I/O関係)を示すブロック図である。
【図3】制御部(モータ制御ECU)を備えたモータユニットの一構成例を示すブロック図である。
【図4】左後輪制御部の制御ロジックを示し、左後モータのトルクの制御を示すフローチャートである。
【図5】右後輪制御部の制御ロジックを示し、右後モータのトルクの制御を示すフローチャートである。
【図6】前輪制御部の制御ロジックを示し、前モータのトルクの制御を示すフローチャートである。
【図7】本実施形態に係る電動車両の駆動システムの制御装置の構成を示すブロック図である。
【図8】各モータユニットからのWDTを受信したときの処理内容を示すフローチャートである。
【符号の説明】
【0083】
1 センタ制御部
2−1,2−2 後輪制御部
2−3 前輪制御部
5 パワープラント
11 車両(電動車両)
12L,12R 前輪
13L,13R 後輪
15 車両操舵装置
16 前モータ
17L,17R 後モータ
24a〜24c パワーデバイスユニット
【特許請求の範囲】
【請求項1】
走行用の複数の駆動モータの各々の目標トルク指令値を、運転者操作と車両挙動のうちの少なくとも一方に応じて所定時間毎に演算する目標トルク演算手段と、
前記目標トルク演算手段から出力された複数の前記目標トルク指令値に基づいて前記複数の駆動モータの各々を制御するモータ制御手段とを備え、
前記複数の駆動モータの各々の出力を個別に調整して走行する電動車両の駆動システムにおいて、
前記複数の駆動モータあるいは前記複数の駆動モータの駆動経路のうち、少なくともいずれか1つに異常が発生したときに、その異常を検知する異常検知手段と、
前記異常検知手段により検知された前記駆動モータあるいは前記駆動モータの駆動経路に対応する前記駆動モータの動作状態を判別する動作状態判別手段と、
前記動作状態判別手段により判別された前記駆動モータの動作状態に合わせて他の前記駆動モータの動作状態を制御する同期制御手段と、
を備えることを特徴する電動車両の駆動システムの制御装置。
【請求項2】
前記同期制御手段は、前記動作状態判別手段により判別された前記駆動モータの動作状態に一致するように他の前記駆動モータを制御することを特徴とする請求項1記載の電動車両の駆動システムの制御装置。
【請求項3】
前記同期制御手段は、前記複数の駆動モータの各々の回転位相を検出する回転位相検出手段を備え、
前記同期制御手段は、前記動作状態判別手段により判別された前記駆動モータに流れる電流を遮断し、その時に前記電流を遮断した前記駆動モータに発生するコギングトルクを前記回転位相検出手段で検出し、他の前記駆動モータを前記コギングトルクの位相と一致するように他の前記駆動モータを制御することを特徴とする請求項2記載の電動車両の駆動システムの制御装置。
【請求項4】
前記同期制御手段は、前記複数の駆動モータの各々の回転位相を検出する回転位相検出手段を備え、
前記複数の駆動モータは前輪を駆動する駆動モータと後輪を駆動する駆動モータとに分け、
前記動作状態判別手段により判別された前記駆動モータに流れる電流を遮断し、その時に前記電流を遮断した前記駆動モータに発生するコギングトルクを前記回転位相検出手段で検出し、
前記前輪を駆動する前記駆動モータと前記後輪を駆動する前記駆動モータのうち、前記電流を遮断した駆動モータが駆動する車輪と反対側の車輪を駆動する前記駆動モータを前記コギングトルクの位相を打ち消すように駆動制御することを特徴とする請求項1記載の電動車両の駆動システムの制御装置。
【請求項5】
走行用の複数の駆動モータの各々の目標トルク指令値を、運転者操作と車両挙動のうちの少なくとも一方に応じて所定時間毎に演算する目標トルク演算手段と、
前記目標トルク演算手段から出力された複数の前記目標トルク指令値に基づいて前記複数の駆動モータの各々を制御するモータ制御手段とを備え、
前記複数の駆動モータの各々の出力を個別に調整して走行する電動車両の駆動システムにおいて、
前記目標トルク演算手段に異常が発生したとき、前記モータ制御手段に所定時間毎に入力される前記複数の駆動モータの各々の前記目標トルク指令値の今回値を破棄し、前記目標トルク指令値の前回値に基づいて前記所定時間だけ前記複数の駆動モータの動作状態を制御する同期制御手段を備えることを特徴する電動車両の駆動システムの制御装置。
【請求項6】
走行用の複数の駆動モータの各々の目標トルク指令値を、運転者操作と車両挙動のうちの少なくとも一方に応じて所定時間毎に演算する目標トルク演算手段と、
前記目標トルク演算手段から出力された複数の前記目標トルク指令値に基づいて前記複数の駆動モータの各々を制御するモータ制御手段とを備え、
前記複数の駆動モータの各々の出力を個別に調整して走行する電動車両の駆動システムに適用される制御方法であり、
前記複数の駆動モータあるいは前記複数の駆動モータの駆動経路のうち、少なくともいずれか1つに異常が発生したときに、その異常を検知する異常検知ステップと、
前記異常検知ステップにより検知された前記駆動モータあるいは前記駆動モータの駆動経路に対応する前記駆動モータの動作状態を判別する判別ステップと、
前記判別ステップにより判別された前記駆動モータの動作状態に合わせて他の前記駆動モータの動作状態を制御するステップと、
を有することを特徴する電動車両の駆動システムの制御方法。
【請求項7】
走行用の複数の駆動モータの各々の目標トルク指令値を、運転者操作と車両挙動のうちの少なくとも一方に応じて所定時間毎に演算する目標トルク演算手段と、
前記目標トルク演算手段から出力された複数の前記目標トルク指令値に基づいて前記複数の駆動モータの各々を制御するモータ制御手段とを備え、
前記複数の駆動モータの各々の出力を個別に調整して走行する電動車両の駆動システムに適用される制御方法であり、
前記目標トルク演算手段が異常であるか否かを判定するステップと、
前記目標トルク演算手段に異常が発生したとき、前記モータ制御手段に所定時間画毎に入力される前記複数の駆動モータの各々の前記目標トルク指令値の今回値を破棄し、前記目標トルク指令値の前回値に基づいて前記所定時間だけ前記複数の駆動モータの動作状態を同期させる制御信号を生成するステップと、
前記制御信号により前記モータ制御手段を制御するステップと、
を有することを特徴する電動車両の駆動システムの制御方法。
【請求項1】
走行用の複数の駆動モータの各々の目標トルク指令値を、運転者操作と車両挙動のうちの少なくとも一方に応じて所定時間毎に演算する目標トルク演算手段と、
前記目標トルク演算手段から出力された複数の前記目標トルク指令値に基づいて前記複数の駆動モータの各々を制御するモータ制御手段とを備え、
前記複数の駆動モータの各々の出力を個別に調整して走行する電動車両の駆動システムにおいて、
前記複数の駆動モータあるいは前記複数の駆動モータの駆動経路のうち、少なくともいずれか1つに異常が発生したときに、その異常を検知する異常検知手段と、
前記異常検知手段により検知された前記駆動モータあるいは前記駆動モータの駆動経路に対応する前記駆動モータの動作状態を判別する動作状態判別手段と、
前記動作状態判別手段により判別された前記駆動モータの動作状態に合わせて他の前記駆動モータの動作状態を制御する同期制御手段と、
を備えることを特徴する電動車両の駆動システムの制御装置。
【請求項2】
前記同期制御手段は、前記動作状態判別手段により判別された前記駆動モータの動作状態に一致するように他の前記駆動モータを制御することを特徴とする請求項1記載の電動車両の駆動システムの制御装置。
【請求項3】
前記同期制御手段は、前記複数の駆動モータの各々の回転位相を検出する回転位相検出手段を備え、
前記同期制御手段は、前記動作状態判別手段により判別された前記駆動モータに流れる電流を遮断し、その時に前記電流を遮断した前記駆動モータに発生するコギングトルクを前記回転位相検出手段で検出し、他の前記駆動モータを前記コギングトルクの位相と一致するように他の前記駆動モータを制御することを特徴とする請求項2記載の電動車両の駆動システムの制御装置。
【請求項4】
前記同期制御手段は、前記複数の駆動モータの各々の回転位相を検出する回転位相検出手段を備え、
前記複数の駆動モータは前輪を駆動する駆動モータと後輪を駆動する駆動モータとに分け、
前記動作状態判別手段により判別された前記駆動モータに流れる電流を遮断し、その時に前記電流を遮断した前記駆動モータに発生するコギングトルクを前記回転位相検出手段で検出し、
前記前輪を駆動する前記駆動モータと前記後輪を駆動する前記駆動モータのうち、前記電流を遮断した駆動モータが駆動する車輪と反対側の車輪を駆動する前記駆動モータを前記コギングトルクの位相を打ち消すように駆動制御することを特徴とする請求項1記載の電動車両の駆動システムの制御装置。
【請求項5】
走行用の複数の駆動モータの各々の目標トルク指令値を、運転者操作と車両挙動のうちの少なくとも一方に応じて所定時間毎に演算する目標トルク演算手段と、
前記目標トルク演算手段から出力された複数の前記目標トルク指令値に基づいて前記複数の駆動モータの各々を制御するモータ制御手段とを備え、
前記複数の駆動モータの各々の出力を個別に調整して走行する電動車両の駆動システムにおいて、
前記目標トルク演算手段に異常が発生したとき、前記モータ制御手段に所定時間毎に入力される前記複数の駆動モータの各々の前記目標トルク指令値の今回値を破棄し、前記目標トルク指令値の前回値に基づいて前記所定時間だけ前記複数の駆動モータの動作状態を制御する同期制御手段を備えることを特徴する電動車両の駆動システムの制御装置。
【請求項6】
走行用の複数の駆動モータの各々の目標トルク指令値を、運転者操作と車両挙動のうちの少なくとも一方に応じて所定時間毎に演算する目標トルク演算手段と、
前記目標トルク演算手段から出力された複数の前記目標トルク指令値に基づいて前記複数の駆動モータの各々を制御するモータ制御手段とを備え、
前記複数の駆動モータの各々の出力を個別に調整して走行する電動車両の駆動システムに適用される制御方法であり、
前記複数の駆動モータあるいは前記複数の駆動モータの駆動経路のうち、少なくともいずれか1つに異常が発生したときに、その異常を検知する異常検知ステップと、
前記異常検知ステップにより検知された前記駆動モータあるいは前記駆動モータの駆動経路に対応する前記駆動モータの動作状態を判別する判別ステップと、
前記判別ステップにより判別された前記駆動モータの動作状態に合わせて他の前記駆動モータの動作状態を制御するステップと、
を有することを特徴する電動車両の駆動システムの制御方法。
【請求項7】
走行用の複数の駆動モータの各々の目標トルク指令値を、運転者操作と車両挙動のうちの少なくとも一方に応じて所定時間毎に演算する目標トルク演算手段と、
前記目標トルク演算手段から出力された複数の前記目標トルク指令値に基づいて前記複数の駆動モータの各々を制御するモータ制御手段とを備え、
前記複数の駆動モータの各々の出力を個別に調整して走行する電動車両の駆動システムに適用される制御方法であり、
前記目標トルク演算手段が異常であるか否かを判定するステップと、
前記目標トルク演算手段に異常が発生したとき、前記モータ制御手段に所定時間画毎に入力される前記複数の駆動モータの各々の前記目標トルク指令値の今回値を破棄し、前記目標トルク指令値の前回値に基づいて前記所定時間だけ前記複数の駆動モータの動作状態を同期させる制御信号を生成するステップと、
前記制御信号により前記モータ制御手段を制御するステップと、
を有することを特徴する電動車両の駆動システムの制御方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2009−81919(P2009−81919A)
【公開日】平成21年4月16日(2009.4.16)
【国際特許分類】
【出願番号】特願2007−247918(P2007−247918)
【出願日】平成19年9月25日(2007.9.25)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
【公開日】平成21年4月16日(2009.4.16)
【国際特許分類】
【出願日】平成19年9月25日(2007.9.25)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
[ Back to top ]