
電動車両

【課題】EV走行中の加速要求に十分に応えることができる電動車両を提供する。
【解決手段】モータジェネレータ20は、蓄電装置12から電力を受け、要求された走行パワーを発生する。ECU24は、モータジェネレータ20を制御する。ECU24は、モータジェネレータ20の最大出力値である最大パワーよりも小さく、かつ、モータジェネレータ20の定常的な出力上限として、定常パワーを設定する。ここで、ECU24は、走行速度が低いほど定常パワーを小さくする。
【解決手段】モータジェネレータ20は、蓄電装置12から電力を受け、要求された走行パワーを発生する。ECU24は、モータジェネレータ20を制御する。ECU24は、モータジェネレータ20の最大出力値である最大パワーよりも小さく、かつ、モータジェネレータ20の定常的な出力上限として、定常パワーを設定する。ここで、ECU24は、走行速度が低いほど定常パワーを小さくする。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、電動車両に関し、特に、電動機によって走行する電動車両に関する。
【背景技術】
【0002】
近年、環境に配慮した車両として、電気自動車(Electric Vehicle)やハイブリッド車両(Hybrid Vehicle)等、電動機によって走行する電動車両が注目されている。電気自動車は、直流電源と電動機とを走行用の動力源として搭載する。ハイブリッド車両は、従来の内燃機関に加えて走行用の動力源として電動機を搭載した車両や、直流電源に加えて燃料電池をエネルギー源として搭載した車両を含む。
【0003】
特開2009−12593号公報(特許文献1)は、電動車両の一種であるハイブリッド車両の走行制御技術を開示する。このハイブリッド車両は、エンジンを停止させて電動機のみで走行するEVモードおよびエンジンを作動させて走行するHVモードのいずれかの走行モードで走行可能である。そして、燃料残量が予め定められたしきい値まで低下すると、EVモードを優先させるように走行モードの切替が制御される。これにより、エンジンの燃料が完全に零になるのをできる限り抑制することができるとされる(特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−12593号公報
【特許文献2】特開2008−68739号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記のようなハイブリッド車両では、EVモードで走行(以下「EV走行」と称する。)中に大きな加速要求があった場合には、一般的に、エンジンを始動してHVモードで走行することにより加速要求に応える。しかしながら、エンジンの作動が禁止される領域の走行時などEV走行が要求される場合や、エンジンを搭載しない電気自動車については、EV走行中の大きな加速要求に十分に応えることができていない。上記の特許文献1では、このような観点での検討はなされていない。
【0006】
それゆえに、この発明の目的は、EV走行中の加速要求に十分に応えることができる電動車両を提供することである。
【課題を解決するための手段】
【0007】
この発明によれば、電動車両は、直流電源と、電動機と、制御装置とを備える。電動機は、直流電源から電力を受け、要求された走行パワーを発生する。制御装置は、電動機を制御する。そして、制御装置は、電動機の最大出力値である第1の値(Ppeak)よりも小さく、かつ、定常的な電動機の出力上限として設定される第2の値(Pbase)を、走行速度が低いほど小さくする。
【0008】
好ましくは、制御装置は、走行パワーが第2の値を超えると、第1の値と第2の値との差によって定まる最大エネルギー量(Emax)の範囲内で電動機を制御する。
【0009】
好ましくは、制御装置は、予め定められた速度よりも走行速度が高いとき、第2の値を所定の最大値(Pbase_max)とする。
【0010】
さらに好ましくは、電動車両は、電動機を駆動する駆動装置をさらに備える。そして、所定の最大値は、駆動装置および電動機の少なくとも一方の温度に基づいて決定される。
【0011】
好ましくは、制御装置は、走行速度が高いほど第2の値を大きくする。
好ましくは、制御装置は、走行パワーが第2の値を超えた場合、直流電源から電動機へ供給されるパワーから第2の値の最大値を差引いた値を積算することによって得られるエネルギー量(E)が最大エネルギー量に達すると、走行パワーを第2の値に制限する。
【0012】
好ましくは、制御装置は、走行状況を学習し、その学習結果に基づいて第2の値を変更する。
【0013】
また、好ましくは、電動車両は、走路情報を有するカーナビゲーション装置をさらに備える。そして、制御装置は、カーナビゲーション装置から得られる走路情報に基づいて第2の値を変更する。
【発明の効果】
【0014】
この発明においては、電動機の最大出力値である第1の値(Ppeak)よりも小さく、かつ、定常的な電動機の出力上限として、第2の値(Pbase)が設定される。そして、制御装置は、走行速度が低いほど第2の値を小さくするので、加速のニーズが高い低速走行時は、加速要求に備えてパワーユニットの温度を抑えておくことができる。したがって、この発明によれば、EV走行中の加速要求に十分に応えることが可能である。
【図面の簡単な説明】
【0015】
【図1】この発明の実施の形態1による電動車両の全体構成を示すブロック図である。
【図2】図1に示すECUの構成を機能的に説明する機能ブロック図である。
【図3】車両速度と定常パワーとの関係を示した図である。
【図4】走行パワーおよび式(2),(3)によって算出されるエネルギー量の時間的変化の一例を示した図である。
【図5】定常パワーが大きい場合(高速走行時)と小さい場合(低速走行時)との差異を説明するための図である。
【図6】実施の形態2におけるECUの構成を機能的に示す機能ブロック図である。
【図7】実施の形態3におけるECUの構成を機能的に示す機能ブロック図である。
【発明を実施するための形態】
【0016】
以下、本発明の実施の形態について、図面を参照しながら詳細に説明する。なお、図中同一または相当部分には同一符号を付してその説明は繰返さない。
【0017】
[実施の形態1]
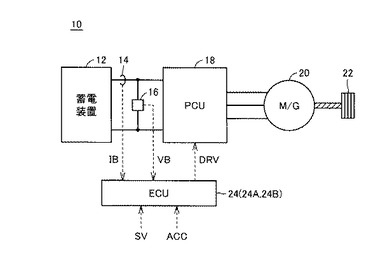
図1は、この発明の実施の形態1による電動車両の全体構成を示すブロック図である。図1を参照して、電動車両10は、蓄電装置12と、電流センサ14と、電圧センサ16と、パワーコントロールユニット(以下「PCU(Power Control Unit)」と称する。)18と、モータジェネレータ20と、駆動輪22と、電子制御ユニット(以下「ECU(Electronic Control Unit)」と称する。)24とを備える。
【0018】
蓄電装置12は、再充電可能な直流電源であり、たとえばリチウムイオンやニッケル水素などの二次電池によって構成される。蓄電装置12は、PCU18へ電力を供給し、また、車両の制動時等にモータジェネレータ20によって発電される回生電力を蓄える。なお、蓄電装置12として大容量のキャパシタも採用可能である。
【0019】
電流センサ14は、蓄電装置12に対して入出力される電流IBを検出し、その検出値をECU24へ出力する。電圧センサ16は、蓄電装置12の電圧VBを検出し、その検出値をECU24へ出力する。
【0020】
PCU18は、蓄電装置12から電力の供給を受け、ECU24から受ける駆動信号DRVに基づいてモータジェネレータ20を駆動する。また、車両の制動時等には、PCU18は、駆動輪22から運動エネルギーを受けてモータジェネレータ20により発電される電力を電圧変換して蓄電装置12へ出力する。PCU18は、たとえば、三相分のスイッチング素子を含む三相PWMインバータによって構成される。なお、三相PWMインバータと蓄電装置12との間に昇圧コンバータを設けてもよい。
【0021】
モータジェネレータ20は、力行動作および回生動作可能な電動発電機であり、たとえば、ロータに永久磁石が埋設された三相交流同期電動発電機によって構成される。モータジェネレータ20は、PCU18によって駆動され、要求された走行パワーを発生して駆動輪22を駆動する。また、電動車両10の制動時等には、モータジェネレータ20は、電動車両10の有する運動エネルギーを駆動輪22から受けて発電する。
【0022】
ECU24は、予め記憶されたプログラムをCPU(Central Processing Unit)で実行することによるソフトウェア処理および/または専用の電子回路によるハードウェア処理により、PCU18を制御する。具体的には、ECU24は、アクセルペダルの踏込量を示すアクセル開度ACCや電動車両10の走行速度を示す車両速度SV等の各種信号に基づいて要求走行パワー(以下、単に「走行パワー」とも称する。)を算出する。そして、ECU24は、算出された走行パワーに基づいてPCU18によりモータジェネレータ20を駆動するための信号(たとえばPWM(Pulse Width Modulation)信号)を生成し、その生成された信号を駆動信号DRVとしてPCU18へ出力する。
【0023】
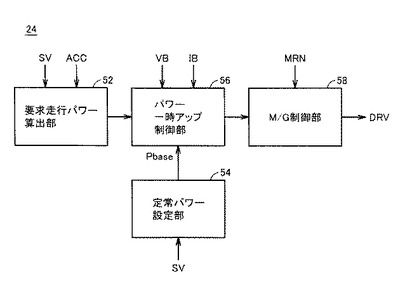
図2は、図1に示したECU24の構成を機能的に示す機能ブロック図である。図2を参照して、ECU24は、要求走行パワー算出部52と、定常パワー設定部54と、パワー一時アップ制御部56と、モータジェネレータ制御部58とを含む。要求走行パワー算出部52は、アクセル開度ACCや車両速度SV等の各種信号に基づいて要求走行パワーを算出する。
【0024】
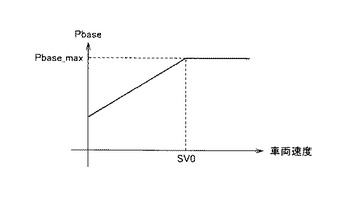
定常パワー設定部54は、モータジェネレータ20の最大出力である最大パワーPpeakよりも小さな値であって、モータジェネレータ20の定常的な出力上限(すなわち、走行パワーの定常的な上限)として用いられる定常パワーPbaseを設定する。ここで、定常パワー設定部54は、電動車両10の走行状況に応じて定常パワーPbaseを変更する。具体的には、図3に示されるように、定常パワー設定部54は、走行速度が低いほど定常パワーPbaseを小さくする。なお、車両速度SVがSV0よりも高く高速走行であると判断されるときは、定常パワー設定部54は、定常パワーPbaseを所定の最大値Pbase_maxとする。この最大値Pbase_maxは、固定値であり、PCU18やモータジェネレータ20の温度仕様に基づいて決定される。なお、速度SV0を特に定めずに、走行速度が高いほど定常パワーを大きくしてもよい。
【0025】
パワー一時アップ制御部56は、要求走行パワー算出部52から走行パワーを受け、定常パワー設定部54から定常パワーPbaseを受ける。また、パワー一時アップ制御部56は、蓄電装置12の電流IBおよび電圧VBに基づいて、蓄電装置12から出力されるパワー(実際の走行パワーあるいはモータジェネレータ20の出力に相当する。)を算出する。そして、パワー一時アップ制御部56は、走行パワーが定常パワーPbaseを超えると、所定の許可時間Ttmpだけモータジェネレータ20の出力を最大パワーPpeakまで許可する。この許可時間Ttmpは、PCU18やモータジェネレータ20の仕様によって決定される。
【0026】
走行パワーが定常パワーPbaseを超えてからは、パワー一時アップ制御部56は、最大パワーPpeakと定常パワーPbaseとの差および上記許可時間Ttmpによって定まる最大エネルギー量Emaxの範囲内で走行パワーを管理する。そして、以下に示される演算式によって算出されるエネルギー量Eが最大エネルギー量Emaxに達すると、パワー一時アップ制御部56は、走行パワーを定常パワーPbaseに制限する。最大エネルギー量Emaxおよびエネルギー量Eは、次式によって算出される。
【0027】
Emax=(Ppeak−Pbase)×Ttmp …(1)
Pb>Pbase_max: E=∫(Pb−Pbase_max)dt …(2)
Pb<Pbase : E=∫(Pb−Pbase)dt …(3)
E<Emax: Pb*≦Ppeak…(4)
E≧Emax: Pb*≦Pbase…(5)
ここで、Pbは、蓄電装置12から出力されるパワー(すなわち走行パワー)を示し、Pb*は、Pbの許容値(蓄電装置12から出力可能なパワー)を示す。
【0028】
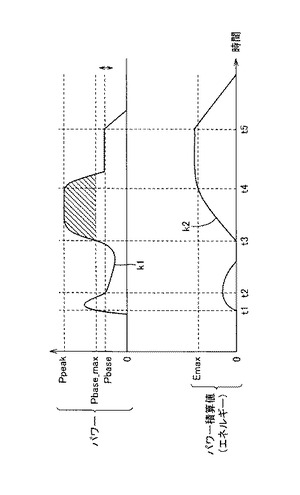
図4は、走行パワーおよびエネルギー量Eが変化する様子の一例を示した図である。図4を参照して、線k1は走行パワー(蓄電装置12の出力パワーに相当する。)を示し、線k2は、上記の式(2),(3)によって算出されるエネルギー量Eを示す。
【0029】
時刻t1において走行パワーが定常パワーの最大値Pbase_maxを超えると、式(2)に基づいてエネルギー量Eの算出が開始される。時刻t2において走行パワーが定常パワーPbaseを下回ると、式(3)に示されるようにエネルギー量Eが減少する。
【0030】
時刻t3において走行パワーがPbase_maxを再び超えると、式(2)に基づいてエネルギー量Eが再び増加する。そして、時刻t4においてエネルギー量Eが最大エネルギー量Emaxに達すると、式(5)に基づいて蓄電装置12の出力パワーの許容値が定常パワーPbase以下に制限される。なお、この図4では、蓄電装置12の出力パワーの許容値が定常パワーPbaseに制限されることにより、走行パワーが定常パワーPbaseに制限されている。その後、時刻t5において走行パワーが低下し始めると、式(3)に基づいてエネルギー量Eも減少する。
【0031】
この実施の形態1では、図3に示したように、低速走行時は、高速走行時に比べて定常パワーPbaseを下げ、高速走行時は、定常パワーPbaseは最大値Pbase_maxに設定される。
【0032】
図5は、定常パワーPbaseが大きい場合(高速走行時)と小さい場合(低速走行時)との差異を説明するための図である。図5を参照して、実線k3は、定常パワーPbaseが大きい場合(Pbase1)の走行パワー(蓄電装置12の出力パワー)の変化を示し、点線k4は、定常パワーPbaseが小さい場合(Pbase2)の走行パワーの変化を示す。
【0033】
Emax1は、定常パワーPbaseがPbase1であるときの最大エネルギー量Emaxの値であり、実線k5は、定常パワーPbaseがPbase1であるときのエネルギー量Eの変化を示す。また、Emax2は、定常パワーPbaseがPbase2であるときの最大エネルギー量Emaxの値であり、点線k6は、定常パワーPbaseがPbase2であるときのエネルギー量Eの変化を示す。
【0034】
定常パワーPbaseを小さくすると(Pbase2)、最大エネルギー量Emaxは大きくなるので(Emax2)、最大パワーPpeakまで出力可能な時間が長くなる(時刻t11〜t13)。したがって、加速のニーズが高い低速走行時は、定常パワーPbaseを下げることによって加速要求に十分に応えることが可能となる。
【0035】
一方、定常パワーPbaseを大きくすると(Pbase1)、最大パワーPpeakまで出力可能な時間は短くなるけれども(時刻t11〜t12)、高速走行時は、加速が完了しているので、低速走行時ほど加速のためのパワーは要求されない。高速走行時は、定常パワーPbaseを大きくすることによって高速走行を維持することが可能となる。
【0036】
そこで、この実施の形態1では、低速走行時は、定常パワーPbaseを小さくすることによって十分な加速性を実現し、高速走行時は、定常パワーPbaseを大きくすることによって十分な高速走行を実現することとしたものである。
【0037】
再び図2を参照して、モータジェネレータ制御部58は、パワー一時アップ制御部56によって上限処理が施された要求走行パワーおよびモータジェネレータ20の回転数MRNに基づいて、PCU18によりモータジェネレータ20を駆動するための駆動信号DRVを算出する。そして、モータジェネレータ制御部58は、その算出された駆動信号DRVをPCU18へ出力する。
【0038】
以上により、この実施の形態1においては、モータジェネレータ20の最大出力である最大パワーPpeakよりも小さく、かつ、モータジェネレータ20の定常的な出力上限(すなわち、走行パワーの定常的な上限)として、定常パワーPbaseが設定される。そして、ECU24は、走行速度が低いほど定常パワーPbaseを小さくするので、加速のニーズが高い低速走行時は、加速要求に備えてPCU18やモータジェネレータ20等の温度を抑えておくことができる。したがって、この実施の形態1によれば、EV走行中の加速要求に十分に応えることが可能である。
【0039】
また、この実施の形態1によれば、加速が完了している高速走行時は、定常パワーPbaseを大きくするので(Pbase_max)、定常的な高速走行を維持することができる。
【0040】
また、この実施の形態1においては、最大パワーPpeakと定常パワーPbaseとの差および最大パワーPpeakまで出力可能な許可時間Ttmpによって定まる最大エネルギー量Emaxの範囲内で走行パワーが管理される。そして、式(2)によって算出されるエネルギー量Eが最大エネルギー量Emaxに達すると、走行パワーが定常パワーPbaseに制限される。したがって、この実施の形態1によれば、PCU18やモータジェネレータ20等が過熱するのを確実に防止することができる。
【0041】
[実施の形態2]
実施の形態1では、走行速度に基づいて定常パワーPbaseを変更するものとしたが、電動車両10の走行状況を学習し、その学習結果に基づいて定常パワーPbaseを変更してもよい。
【0042】
この実施の形態2による電動車両の全体構成は、図1に示した実施の形態1による電動車両10と同じである。
【0043】
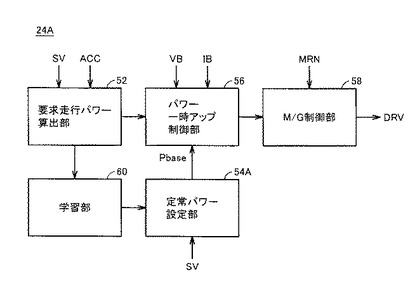
図6は、実施の形態2におけるECU24Aの構成を機能的に示す機能ブロック図である。図6を参照して、ECU24Aは、図2に示した実施の形態1におけるECU24の構成において、学習部60をさらに含み、定常パワー設定部54に代えて定常パワー設定部54Aを含む。
【0044】
学習部60は、電動車両10の走行状況を学習し、その学習結果を定常パワー設定部54Aへ出力する。一例として、学習部60は、走行パワーが最大パワーPpeakに達する頻度や時間等をユーザーごとに収集してそれらの傾向を学習する。
【0045】
定常パワー設定部54Aは、学習部60の学習結果に基づいて定常パワーPbaseを変更する。一例として、定常パワー設定部54Aは、走行パワーが最大パワーPpeakに達する頻度や時間等が大きい利用者に対しては、定常パワーPbaseを小さくし、高速走行の時間が長い利用者に対しては、定常パワーPbaseを大きくする。これにより、利用者の運転傾向に応じた走行性能(加速性重視/高速走行性重視)を実現することが可能となる。
【0046】
なお、定常パワー設定部54Aは、図3に示される定常パワーPbaseの設定に対して、学習部60の学習結果に基づいて定常パワーPbaseを変更してもよいし、図3に示される定常パワーPbaseの設定とは関係なく、学習部60の学習結果に基づいて定常パワーPbaseを設定してもよい。
【0047】
以上のように、この実施の形態2においては、電動車両10の走行状況が学習され、その学習結果に基づいて定常パワーPbaseが変更される。したがって、この実施の形態2によれば、利用者の運転傾向に応じた走行性能(加速性重視/高速走行性重視)を実現することが可能となる。
【0048】
[実施の形態3]
実施の形態3では、カーナビゲーション装置から得られる走路情報に基づいて定常パワーPbaseが変更される。
【0049】
この実施の形態3による電動車両の全体構成は、図1に示した実施の形態1による電動車両10と同じである。
【0050】
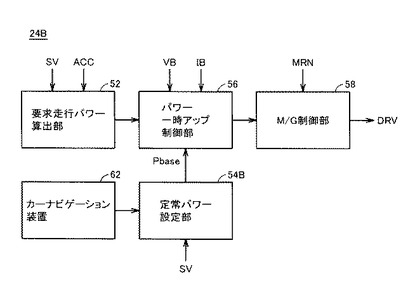
図7は、実施の形態3におけるECU24Bの構成を機能的に示す機能ブロック図である。図7を参照して、ECU24Bは、図2に示した実施の形態1におけるECU24の構成において、カーナビゲーション装置62をさらに含み、定常パワー設定部54に代えて定常パワー設定部54Bを含む。
【0051】
カーナビゲーション装置62は、電動車両10の現在位置を検出して表示部に表示する。また、カーナビゲーション装置62は、電動車両10の走路情報を有する。走路情報は、目的地までの予定走路の勾配情報を含む。そして、カーナビゲーション装置62は、定常パワー設定部54Bへ走路情報を出力する。
【0052】
定常パワー設定部54Bは、カーナビゲーション装置62から受ける走路情報に基づいて定常パワーPbaseを変更する。一例として、目的地までの予定走路の勾配情報に基づいて、予定走路に登坂路が含まれると判定されると、定常パワー設定部54Bは、電動車両10が登坂路に到達する前に定常パワーPbaseを下げる。これにより、登坂路において十分な加速性が得られる。
【0053】
なお、定常パワー設定部54Bは、図3に示される定常パワーPbaseの設定に対して、カーナビゲーション装置62からの走路情報に基づいて定常パワーPbaseを変更してもよいし、図3に示される定常パワーPbaseの設定とは関係なく、カーナビゲーション装置62からの走路情報に基づいて定常パワーPbaseを設定してもよい。
【0054】
以上のように、この実施の形態3によれば、カーナビゲーション装置62から得られる走路情報に基づいて定常パワーPbaseを変更するので、登坂路における加速要求に十分に応えることが可能である。
【0055】
なお、上記の各実施の形態において、電動車両10は、動力源としてエンジン(図示せず)をさらに搭載したハイブリッド車両であってもよい。但し、この発明は、エンジンを停止して走行するEV走行中の制御に関するものであり、ハイブリッド車両においては、たとえば、エンジンの作動が禁止される領域をEV走行している場合などに適用されるものである。
【0056】
なお、上記において、蓄電装置12は、この発明における「直流電源」の一実施例に対応し、モータジェネレータ20は、この発明における「電動機」の一実施例に対応する。また、ECU24,24A,24Bは、この発明における「制御装置」の一実施例に対応し、PCU18は、この発明における「駆動装置」の一実施例に対応する。
【0057】
今回開示された実施の形態は、すべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は、上記した実施の形態の説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。
【符号の説明】
【0058】
10 電動車両、12 蓄電装置、14 電流センサ、16 電圧センサ、18 PCU、20 モータジェネレータ、22 駆動輪、24,24A,24B ECU、52 要求走行パワー算出部、54,54A,54B 定常パワー設定部、56 パワー一時アップ制御部、58 モータジェネレータ制御部、60 学習部、62 カーナビゲーション装置。
【技術分野】
【0001】
この発明は、電動車両に関し、特に、電動機によって走行する電動車両に関する。
【背景技術】
【0002】
近年、環境に配慮した車両として、電気自動車(Electric Vehicle)やハイブリッド車両(Hybrid Vehicle)等、電動機によって走行する電動車両が注目されている。電気自動車は、直流電源と電動機とを走行用の動力源として搭載する。ハイブリッド車両は、従来の内燃機関に加えて走行用の動力源として電動機を搭載した車両や、直流電源に加えて燃料電池をエネルギー源として搭載した車両を含む。
【0003】
特開2009−12593号公報(特許文献1)は、電動車両の一種であるハイブリッド車両の走行制御技術を開示する。このハイブリッド車両は、エンジンを停止させて電動機のみで走行するEVモードおよびエンジンを作動させて走行するHVモードのいずれかの走行モードで走行可能である。そして、燃料残量が予め定められたしきい値まで低下すると、EVモードを優先させるように走行モードの切替が制御される。これにより、エンジンの燃料が完全に零になるのをできる限り抑制することができるとされる(特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−12593号公報
【特許文献2】特開2008−68739号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記のようなハイブリッド車両では、EVモードで走行(以下「EV走行」と称する。)中に大きな加速要求があった場合には、一般的に、エンジンを始動してHVモードで走行することにより加速要求に応える。しかしながら、エンジンの作動が禁止される領域の走行時などEV走行が要求される場合や、エンジンを搭載しない電気自動車については、EV走行中の大きな加速要求に十分に応えることができていない。上記の特許文献1では、このような観点での検討はなされていない。
【0006】
それゆえに、この発明の目的は、EV走行中の加速要求に十分に応えることができる電動車両を提供することである。
【課題を解決するための手段】
【0007】
この発明によれば、電動車両は、直流電源と、電動機と、制御装置とを備える。電動機は、直流電源から電力を受け、要求された走行パワーを発生する。制御装置は、電動機を制御する。そして、制御装置は、電動機の最大出力値である第1の値(Ppeak)よりも小さく、かつ、定常的な電動機の出力上限として設定される第2の値(Pbase)を、走行速度が低いほど小さくする。
【0008】
好ましくは、制御装置は、走行パワーが第2の値を超えると、第1の値と第2の値との差によって定まる最大エネルギー量(Emax)の範囲内で電動機を制御する。
【0009】
好ましくは、制御装置は、予め定められた速度よりも走行速度が高いとき、第2の値を所定の最大値(Pbase_max)とする。
【0010】
さらに好ましくは、電動車両は、電動機を駆動する駆動装置をさらに備える。そして、所定の最大値は、駆動装置および電動機の少なくとも一方の温度に基づいて決定される。
【0011】
好ましくは、制御装置は、走行速度が高いほど第2の値を大きくする。
好ましくは、制御装置は、走行パワーが第2の値を超えた場合、直流電源から電動機へ供給されるパワーから第2の値の最大値を差引いた値を積算することによって得られるエネルギー量(E)が最大エネルギー量に達すると、走行パワーを第2の値に制限する。
【0012】
好ましくは、制御装置は、走行状況を学習し、その学習結果に基づいて第2の値を変更する。
【0013】
また、好ましくは、電動車両は、走路情報を有するカーナビゲーション装置をさらに備える。そして、制御装置は、カーナビゲーション装置から得られる走路情報に基づいて第2の値を変更する。
【発明の効果】
【0014】
この発明においては、電動機の最大出力値である第1の値(Ppeak)よりも小さく、かつ、定常的な電動機の出力上限として、第2の値(Pbase)が設定される。そして、制御装置は、走行速度が低いほど第2の値を小さくするので、加速のニーズが高い低速走行時は、加速要求に備えてパワーユニットの温度を抑えておくことができる。したがって、この発明によれば、EV走行中の加速要求に十分に応えることが可能である。
【図面の簡単な説明】
【0015】
【図1】この発明の実施の形態1による電動車両の全体構成を示すブロック図である。
【図2】図1に示すECUの構成を機能的に説明する機能ブロック図である。
【図3】車両速度と定常パワーとの関係を示した図である。
【図4】走行パワーおよび式(2),(3)によって算出されるエネルギー量の時間的変化の一例を示した図である。
【図5】定常パワーが大きい場合(高速走行時)と小さい場合(低速走行時)との差異を説明するための図である。
【図6】実施の形態2におけるECUの構成を機能的に示す機能ブロック図である。
【図7】実施の形態3におけるECUの構成を機能的に示す機能ブロック図である。
【発明を実施するための形態】
【0016】
以下、本発明の実施の形態について、図面を参照しながら詳細に説明する。なお、図中同一または相当部分には同一符号を付してその説明は繰返さない。
【0017】
[実施の形態1]
図1は、この発明の実施の形態1による電動車両の全体構成を示すブロック図である。図1を参照して、電動車両10は、蓄電装置12と、電流センサ14と、電圧センサ16と、パワーコントロールユニット(以下「PCU(Power Control Unit)」と称する。)18と、モータジェネレータ20と、駆動輪22と、電子制御ユニット(以下「ECU(Electronic Control Unit)」と称する。)24とを備える。
【0018】
蓄電装置12は、再充電可能な直流電源であり、たとえばリチウムイオンやニッケル水素などの二次電池によって構成される。蓄電装置12は、PCU18へ電力を供給し、また、車両の制動時等にモータジェネレータ20によって発電される回生電力を蓄える。なお、蓄電装置12として大容量のキャパシタも採用可能である。
【0019】
電流センサ14は、蓄電装置12に対して入出力される電流IBを検出し、その検出値をECU24へ出力する。電圧センサ16は、蓄電装置12の電圧VBを検出し、その検出値をECU24へ出力する。
【0020】
PCU18は、蓄電装置12から電力の供給を受け、ECU24から受ける駆動信号DRVに基づいてモータジェネレータ20を駆動する。また、車両の制動時等には、PCU18は、駆動輪22から運動エネルギーを受けてモータジェネレータ20により発電される電力を電圧変換して蓄電装置12へ出力する。PCU18は、たとえば、三相分のスイッチング素子を含む三相PWMインバータによって構成される。なお、三相PWMインバータと蓄電装置12との間に昇圧コンバータを設けてもよい。
【0021】
モータジェネレータ20は、力行動作および回生動作可能な電動発電機であり、たとえば、ロータに永久磁石が埋設された三相交流同期電動発電機によって構成される。モータジェネレータ20は、PCU18によって駆動され、要求された走行パワーを発生して駆動輪22を駆動する。また、電動車両10の制動時等には、モータジェネレータ20は、電動車両10の有する運動エネルギーを駆動輪22から受けて発電する。
【0022】
ECU24は、予め記憶されたプログラムをCPU(Central Processing Unit)で実行することによるソフトウェア処理および/または専用の電子回路によるハードウェア処理により、PCU18を制御する。具体的には、ECU24は、アクセルペダルの踏込量を示すアクセル開度ACCや電動車両10の走行速度を示す車両速度SV等の各種信号に基づいて要求走行パワー(以下、単に「走行パワー」とも称する。)を算出する。そして、ECU24は、算出された走行パワーに基づいてPCU18によりモータジェネレータ20を駆動するための信号(たとえばPWM(Pulse Width Modulation)信号)を生成し、その生成された信号を駆動信号DRVとしてPCU18へ出力する。
【0023】
図2は、図1に示したECU24の構成を機能的に示す機能ブロック図である。図2を参照して、ECU24は、要求走行パワー算出部52と、定常パワー設定部54と、パワー一時アップ制御部56と、モータジェネレータ制御部58とを含む。要求走行パワー算出部52は、アクセル開度ACCや車両速度SV等の各種信号に基づいて要求走行パワーを算出する。
【0024】
定常パワー設定部54は、モータジェネレータ20の最大出力である最大パワーPpeakよりも小さな値であって、モータジェネレータ20の定常的な出力上限(すなわち、走行パワーの定常的な上限)として用いられる定常パワーPbaseを設定する。ここで、定常パワー設定部54は、電動車両10の走行状況に応じて定常パワーPbaseを変更する。具体的には、図3に示されるように、定常パワー設定部54は、走行速度が低いほど定常パワーPbaseを小さくする。なお、車両速度SVがSV0よりも高く高速走行であると判断されるときは、定常パワー設定部54は、定常パワーPbaseを所定の最大値Pbase_maxとする。この最大値Pbase_maxは、固定値であり、PCU18やモータジェネレータ20の温度仕様に基づいて決定される。なお、速度SV0を特に定めずに、走行速度が高いほど定常パワーを大きくしてもよい。
【0025】
パワー一時アップ制御部56は、要求走行パワー算出部52から走行パワーを受け、定常パワー設定部54から定常パワーPbaseを受ける。また、パワー一時アップ制御部56は、蓄電装置12の電流IBおよび電圧VBに基づいて、蓄電装置12から出力されるパワー(実際の走行パワーあるいはモータジェネレータ20の出力に相当する。)を算出する。そして、パワー一時アップ制御部56は、走行パワーが定常パワーPbaseを超えると、所定の許可時間Ttmpだけモータジェネレータ20の出力を最大パワーPpeakまで許可する。この許可時間Ttmpは、PCU18やモータジェネレータ20の仕様によって決定される。
【0026】
走行パワーが定常パワーPbaseを超えてからは、パワー一時アップ制御部56は、最大パワーPpeakと定常パワーPbaseとの差および上記許可時間Ttmpによって定まる最大エネルギー量Emaxの範囲内で走行パワーを管理する。そして、以下に示される演算式によって算出されるエネルギー量Eが最大エネルギー量Emaxに達すると、パワー一時アップ制御部56は、走行パワーを定常パワーPbaseに制限する。最大エネルギー量Emaxおよびエネルギー量Eは、次式によって算出される。
【0027】
Emax=(Ppeak−Pbase)×Ttmp …(1)
Pb>Pbase_max: E=∫(Pb−Pbase_max)dt …(2)
Pb<Pbase : E=∫(Pb−Pbase)dt …(3)
E<Emax: Pb*≦Ppeak…(4)
E≧Emax: Pb*≦Pbase…(5)
ここで、Pbは、蓄電装置12から出力されるパワー(すなわち走行パワー)を示し、Pb*は、Pbの許容値(蓄電装置12から出力可能なパワー)を示す。
【0028】
図4は、走行パワーおよびエネルギー量Eが変化する様子の一例を示した図である。図4を参照して、線k1は走行パワー(蓄電装置12の出力パワーに相当する。)を示し、線k2は、上記の式(2),(3)によって算出されるエネルギー量Eを示す。
【0029】
時刻t1において走行パワーが定常パワーの最大値Pbase_maxを超えると、式(2)に基づいてエネルギー量Eの算出が開始される。時刻t2において走行パワーが定常パワーPbaseを下回ると、式(3)に示されるようにエネルギー量Eが減少する。
【0030】
時刻t3において走行パワーがPbase_maxを再び超えると、式(2)に基づいてエネルギー量Eが再び増加する。そして、時刻t4においてエネルギー量Eが最大エネルギー量Emaxに達すると、式(5)に基づいて蓄電装置12の出力パワーの許容値が定常パワーPbase以下に制限される。なお、この図4では、蓄電装置12の出力パワーの許容値が定常パワーPbaseに制限されることにより、走行パワーが定常パワーPbaseに制限されている。その後、時刻t5において走行パワーが低下し始めると、式(3)に基づいてエネルギー量Eも減少する。
【0031】
この実施の形態1では、図3に示したように、低速走行時は、高速走行時に比べて定常パワーPbaseを下げ、高速走行時は、定常パワーPbaseは最大値Pbase_maxに設定される。
【0032】
図5は、定常パワーPbaseが大きい場合(高速走行時)と小さい場合(低速走行時)との差異を説明するための図である。図5を参照して、実線k3は、定常パワーPbaseが大きい場合(Pbase1)の走行パワー(蓄電装置12の出力パワー)の変化を示し、点線k4は、定常パワーPbaseが小さい場合(Pbase2)の走行パワーの変化を示す。
【0033】
Emax1は、定常パワーPbaseがPbase1であるときの最大エネルギー量Emaxの値であり、実線k5は、定常パワーPbaseがPbase1であるときのエネルギー量Eの変化を示す。また、Emax2は、定常パワーPbaseがPbase2であるときの最大エネルギー量Emaxの値であり、点線k6は、定常パワーPbaseがPbase2であるときのエネルギー量Eの変化を示す。
【0034】
定常パワーPbaseを小さくすると(Pbase2)、最大エネルギー量Emaxは大きくなるので(Emax2)、最大パワーPpeakまで出力可能な時間が長くなる(時刻t11〜t13)。したがって、加速のニーズが高い低速走行時は、定常パワーPbaseを下げることによって加速要求に十分に応えることが可能となる。
【0035】
一方、定常パワーPbaseを大きくすると(Pbase1)、最大パワーPpeakまで出力可能な時間は短くなるけれども(時刻t11〜t12)、高速走行時は、加速が完了しているので、低速走行時ほど加速のためのパワーは要求されない。高速走行時は、定常パワーPbaseを大きくすることによって高速走行を維持することが可能となる。
【0036】
そこで、この実施の形態1では、低速走行時は、定常パワーPbaseを小さくすることによって十分な加速性を実現し、高速走行時は、定常パワーPbaseを大きくすることによって十分な高速走行を実現することとしたものである。
【0037】
再び図2を参照して、モータジェネレータ制御部58は、パワー一時アップ制御部56によって上限処理が施された要求走行パワーおよびモータジェネレータ20の回転数MRNに基づいて、PCU18によりモータジェネレータ20を駆動するための駆動信号DRVを算出する。そして、モータジェネレータ制御部58は、その算出された駆動信号DRVをPCU18へ出力する。
【0038】
以上により、この実施の形態1においては、モータジェネレータ20の最大出力である最大パワーPpeakよりも小さく、かつ、モータジェネレータ20の定常的な出力上限(すなわち、走行パワーの定常的な上限)として、定常パワーPbaseが設定される。そして、ECU24は、走行速度が低いほど定常パワーPbaseを小さくするので、加速のニーズが高い低速走行時は、加速要求に備えてPCU18やモータジェネレータ20等の温度を抑えておくことができる。したがって、この実施の形態1によれば、EV走行中の加速要求に十分に応えることが可能である。
【0039】
また、この実施の形態1によれば、加速が完了している高速走行時は、定常パワーPbaseを大きくするので(Pbase_max)、定常的な高速走行を維持することができる。
【0040】
また、この実施の形態1においては、最大パワーPpeakと定常パワーPbaseとの差および最大パワーPpeakまで出力可能な許可時間Ttmpによって定まる最大エネルギー量Emaxの範囲内で走行パワーが管理される。そして、式(2)によって算出されるエネルギー量Eが最大エネルギー量Emaxに達すると、走行パワーが定常パワーPbaseに制限される。したがって、この実施の形態1によれば、PCU18やモータジェネレータ20等が過熱するのを確実に防止することができる。
【0041】
[実施の形態2]
実施の形態1では、走行速度に基づいて定常パワーPbaseを変更するものとしたが、電動車両10の走行状況を学習し、その学習結果に基づいて定常パワーPbaseを変更してもよい。
【0042】
この実施の形態2による電動車両の全体構成は、図1に示した実施の形態1による電動車両10と同じである。
【0043】
図6は、実施の形態2におけるECU24Aの構成を機能的に示す機能ブロック図である。図6を参照して、ECU24Aは、図2に示した実施の形態1におけるECU24の構成において、学習部60をさらに含み、定常パワー設定部54に代えて定常パワー設定部54Aを含む。
【0044】
学習部60は、電動車両10の走行状況を学習し、その学習結果を定常パワー設定部54Aへ出力する。一例として、学習部60は、走行パワーが最大パワーPpeakに達する頻度や時間等をユーザーごとに収集してそれらの傾向を学習する。
【0045】
定常パワー設定部54Aは、学習部60の学習結果に基づいて定常パワーPbaseを変更する。一例として、定常パワー設定部54Aは、走行パワーが最大パワーPpeakに達する頻度や時間等が大きい利用者に対しては、定常パワーPbaseを小さくし、高速走行の時間が長い利用者に対しては、定常パワーPbaseを大きくする。これにより、利用者の運転傾向に応じた走行性能(加速性重視/高速走行性重視)を実現することが可能となる。
【0046】
なお、定常パワー設定部54Aは、図3に示される定常パワーPbaseの設定に対して、学習部60の学習結果に基づいて定常パワーPbaseを変更してもよいし、図3に示される定常パワーPbaseの設定とは関係なく、学習部60の学習結果に基づいて定常パワーPbaseを設定してもよい。
【0047】
以上のように、この実施の形態2においては、電動車両10の走行状況が学習され、その学習結果に基づいて定常パワーPbaseが変更される。したがって、この実施の形態2によれば、利用者の運転傾向に応じた走行性能(加速性重視/高速走行性重視)を実現することが可能となる。
【0048】
[実施の形態3]
実施の形態3では、カーナビゲーション装置から得られる走路情報に基づいて定常パワーPbaseが変更される。
【0049】
この実施の形態3による電動車両の全体構成は、図1に示した実施の形態1による電動車両10と同じである。
【0050】
図7は、実施の形態3におけるECU24Bの構成を機能的に示す機能ブロック図である。図7を参照して、ECU24Bは、図2に示した実施の形態1におけるECU24の構成において、カーナビゲーション装置62をさらに含み、定常パワー設定部54に代えて定常パワー設定部54Bを含む。
【0051】
カーナビゲーション装置62は、電動車両10の現在位置を検出して表示部に表示する。また、カーナビゲーション装置62は、電動車両10の走路情報を有する。走路情報は、目的地までの予定走路の勾配情報を含む。そして、カーナビゲーション装置62は、定常パワー設定部54Bへ走路情報を出力する。
【0052】
定常パワー設定部54Bは、カーナビゲーション装置62から受ける走路情報に基づいて定常パワーPbaseを変更する。一例として、目的地までの予定走路の勾配情報に基づいて、予定走路に登坂路が含まれると判定されると、定常パワー設定部54Bは、電動車両10が登坂路に到達する前に定常パワーPbaseを下げる。これにより、登坂路において十分な加速性が得られる。
【0053】
なお、定常パワー設定部54Bは、図3に示される定常パワーPbaseの設定に対して、カーナビゲーション装置62からの走路情報に基づいて定常パワーPbaseを変更してもよいし、図3に示される定常パワーPbaseの設定とは関係なく、カーナビゲーション装置62からの走路情報に基づいて定常パワーPbaseを設定してもよい。
【0054】
以上のように、この実施の形態3によれば、カーナビゲーション装置62から得られる走路情報に基づいて定常パワーPbaseを変更するので、登坂路における加速要求に十分に応えることが可能である。
【0055】
なお、上記の各実施の形態において、電動車両10は、動力源としてエンジン(図示せず)をさらに搭載したハイブリッド車両であってもよい。但し、この発明は、エンジンを停止して走行するEV走行中の制御に関するものであり、ハイブリッド車両においては、たとえば、エンジンの作動が禁止される領域をEV走行している場合などに適用されるものである。
【0056】
なお、上記において、蓄電装置12は、この発明における「直流電源」の一実施例に対応し、モータジェネレータ20は、この発明における「電動機」の一実施例に対応する。また、ECU24,24A,24Bは、この発明における「制御装置」の一実施例に対応し、PCU18は、この発明における「駆動装置」の一実施例に対応する。
【0057】
今回開示された実施の形態は、すべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は、上記した実施の形態の説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。
【符号の説明】
【0058】
10 電動車両、12 蓄電装置、14 電流センサ、16 電圧センサ、18 PCU、20 モータジェネレータ、22 駆動輪、24,24A,24B ECU、52 要求走行パワー算出部、54,54A,54B 定常パワー設定部、56 パワー一時アップ制御部、58 モータジェネレータ制御部、60 学習部、62 カーナビゲーション装置。
【特許請求の範囲】
【請求項1】
直流電源と、
前記直流電源から電力を受け、要求された走行パワーを発生する電動機と、
前記電動機を制御する制御装置とを備え、
前記制御装置は、前記電動機の最大出力値である第1の値よりも小さく、かつ、定常的な前記電動機の出力上限として設定される第2の値を、走行速度が低いほど小さくする、電動車両。
【請求項2】
前記制御装置は、前記走行パワーが前記第2の値を超えると、前記第1の値と前記第2の値との差によって定まる最大エネルギー量の範囲内で前記電動機を制御する、請求項1に記載の電動車両。
【請求項3】
前記制御装置は、予め定められた速度よりも前記走行速度が高いとき、前記第2の値を所定の最大値とする、請求項1または2に記載の電動車両。
【請求項4】
前記電動機を駆動する駆動装置をさらに備え、
前記所定の最大値は、前記駆動装置および前記電動機の少なくとも一方の温度に基づいて決定される、請求項3に記載の電動車両。
【請求項5】
前記制御装置は、走行速度が高いほど前記第2の値を大きくする、請求項1から4のいずれか1項に記載の電動車両。
【請求項6】
前記制御装置は、前記走行パワーが前記第2の値を超えた場合、前記直流電源から前記電動機へ供給されるパワーから前記第2の値の最大値を差引いた値を積算することによって得られるエネルギー量が前記最大エネルギー量に達すると、前記走行パワーを前記第2の値に制限する、請求項2に記載の電動車両。
【請求項7】
前記制御装置は、走行状況を学習し、その学習結果に基づいて前記第2の値を変更する、請求項1から6のいずれか1項に記載の電動車両。
【請求項8】
走路情報を有するカーナビゲーション装置をさらに備え、
前記制御装置は、前記カーナビゲーション装置から得られる走路情報に基づいて前記第2の値を変更する、請求項1から6のいずれか1項に記載の電動車両。
【請求項1】
直流電源と、
前記直流電源から電力を受け、要求された走行パワーを発生する電動機と、
前記電動機を制御する制御装置とを備え、
前記制御装置は、前記電動機の最大出力値である第1の値よりも小さく、かつ、定常的な前記電動機の出力上限として設定される第2の値を、走行速度が低いほど小さくする、電動車両。
【請求項2】
前記制御装置は、前記走行パワーが前記第2の値を超えると、前記第1の値と前記第2の値との差によって定まる最大エネルギー量の範囲内で前記電動機を制御する、請求項1に記載の電動車両。
【請求項3】
前記制御装置は、予め定められた速度よりも前記走行速度が高いとき、前記第2の値を所定の最大値とする、請求項1または2に記載の電動車両。
【請求項4】
前記電動機を駆動する駆動装置をさらに備え、
前記所定の最大値は、前記駆動装置および前記電動機の少なくとも一方の温度に基づいて決定される、請求項3に記載の電動車両。
【請求項5】
前記制御装置は、走行速度が高いほど前記第2の値を大きくする、請求項1から4のいずれか1項に記載の電動車両。
【請求項6】
前記制御装置は、前記走行パワーが前記第2の値を超えた場合、前記直流電源から前記電動機へ供給されるパワーから前記第2の値の最大値を差引いた値を積算することによって得られるエネルギー量が前記最大エネルギー量に達すると、前記走行パワーを前記第2の値に制限する、請求項2に記載の電動車両。
【請求項7】
前記制御装置は、走行状況を学習し、その学習結果に基づいて前記第2の値を変更する、請求項1から6のいずれか1項に記載の電動車両。
【請求項8】
走路情報を有するカーナビゲーション装置をさらに備え、
前記制御装置は、前記カーナビゲーション装置から得られる走路情報に基づいて前記第2の値を変更する、請求項1から6のいずれか1項に記載の電動車両。
【図1】


【図2】
【図3】
【図4】
【図5】

【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−74771(P2013−74771A)
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願番号】特願2011−214170(P2011−214170)
【出願日】平成23年9月29日(2011.9.29)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願日】平成23年9月29日(2011.9.29)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]